-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
1/6
-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
2/6
541
general induction motor configuration
is shown in Fig.
1.
The
r-8
cross
sectional plan of t he whole motor
region is divided into subregions as
shown. To determine the harmonics
due to stator and rotor slots and the
rotor relative motion, t he following
assumptions a re made:
(1) The s tator winding is replaced by
an equivalent current sheet.
For
a
three-phase machine t he general
expression for the stator excitation
current density is:
JJ0.t) = J,(n
,m )
d @dmoot (1)
where
oo
is the supply frequency,
8
is the angle subtended at th e center
of the machine (in mechanical
degrees) and p is the number of pole
pairs.
JS(n,m)
is the amplitude of
the spatial harmonic of order n
which is determined by the winding
distributi on function, and the
temporal harmonic of order
m,
which
is determined by the nature of the
excitation current. In this work it
is assumed that the winding is
a
sinusoidally distributed balanced
three-phase winding,
so
that n and
m
take only the value 1 The amplitude
of the fundamental component of the
excitation current is determined from
the winding distribution function.
(2)
The stator slots are replaced by
a region of thickness equal to the
slot depth. This region has a
periodic permeability function
p(8)
.
(3) The rotor slots are replaced by a
layer on the top of the rotor back
iron region. This layer has a
thickness equal to the rotor slot
depth and a periodic conductivity
functio n o(8, t) that is also a
function of time since the rotor
r o t a t e s w i t h s p e e d
0
a n d
conductivity
O 8 ,
t)
The periodic permeability p ( 0 ) and
conductivity U(8,t) functions can be
expressed in terms of Fourier series:
m a
p@) = b(n)
ein se
n
O(8.t)
=
a n)
dnN& e i f lromt
(3)
n
Here, the number of stator slots,
Ns,
determines th e periodicity of
p(8):
the number of rotor slots, Nr,
determines the angular periodicity of
O(8,t) and the rotor mechanical
speed,
om,
determines its tempo ral
periodicity. The amplitudes of the
harmonic components b(n) and a(n) are
obtained for a rectangular shape
slots as:
a O) =
03
h
( 5 )
where W is the slot width, t is the
tooth width, px is the pitch and the
subscript x=s and x-r refers to
stator and rotor respectively.
ELECTR-TIC
FIELD
EQUATIONS
From Maxwell's equations, t he general
differential equation describing the
axial component of the magnetic
vector potential A in the different
regions of the motor is the Helmholtz
equation:
2
V A = p[Js + J e ]
where Js is the stator excitation
surface current density and Je is the
rotor induced current density, which
is related to
A
by:
J, = -Q - CO,,,-
[
(7)
From
Eqs. 6
and
I
it can be
conjectured that
A
will contain
harmonic components of the same
temporal and spatial frequencies as
Js(8,t),
p ( 0 )
and o(8,t),
so
that
a
may generally be written in the form:
m.1
8 )
The index i=1,2,3,4 is used to denote
the different regions within the
-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
3/6
542
motor. The indexes m and 1 represent
the effects of the harmonics of the
rotor and stator slotted structures,
respectively. They contribu te to an
electromagnetic field with spatial
frequency
( m
Nr+l Ns+p) or effective
number of poles, and temporal fre-
quency (mNr%+Oo). The amplitu de
Ai(m,l
)
is a function of the radial
distance
r
within region i. For the
Helmholtz equation t o be satisfied,
these amplitudes must have the
following dependence on r:
Ai(m,l
=
ci(m.1) P m J ) Di(m.1)
r-M(mJ
(9)
w h e r e
M(m,I)dmN,+l +pl
and the
constants Ci(m,l) and Di(m,l) are to be
determined from the boundary condi-
tions at the three surfaces
separati ng th e four regions. (Fig. 1)
as well as at r=O and
r=-.
The
continuity of the normal components
of the magnetic flux density
B r
and
the discontinuity of the tangential
components of the magnetic field
intensity He at the surfaces r= ra,
rsl and rs2 result in six equations
relating the values of Ai(i=1,2,3,4),
the parameters of the four regions
and the excitation and the induced
current sheets. Substituting for ai,
A2,
543, A4, and Je using Eqs. 7 - 8 ) ,
and equating each of the harmonics of
the same order on both sides of the
boundary conditions, six equations
relating the six unknown amplitudes
C1, C2, D2, C3, D3, D4 are obtained.
By a series of substitutions they can
be reduced to a single equation
relating the amplitudes of the
harmonic c omponents of C1
m , l ) :
J
The functions y1-y6 and F are defined
in terms of the machine main
dimensions, parameters and the stator
excitation current, see Appendix (I).
Fina lly t o sol ve Eq. 10 for Cl(m,l)
the summation terms are cast in the
matrix form
:
Y(n-a Cl(n-)=F(n )
(11)
n
where
Y ( n , n )
and F(n
)
are known
elements
of
matrices described in
Appendix (1) and Cl(n') are elements
of a column matrix that is simply a
stacking of the variables
I
[Cl
m , l ) ,
1
=
fl,f2,f3,
...
rDTf1,f2,f3,
.... .
This matrix equation can be solved
for th e unkn owns Cl(n'), from which
the ampl itud es Cl(m,l) of t he dif-
ferent harmonic components are
obta ined . Once Cl(m,l) are deter-
mined, the other amplit udes can be
computed by use of the boundary
condition relations and thus the
magnetic vector potential can be
determined in all regions of the
motor.
Flux
density diattibution
Knowing t he magnetic vector potential
distribution within motor different
regions, Lz1, L I Z , A3 and A4, the two
components of the magnetic flux
density
3
and
Be
are defined
everywhere in the defined space by:
(12)
Generally
&
nd can be written in
the form:
IB e,t) =
B,(m.l) d( r+ +P) d mA+cla)
m.1
(13)
a e , t ) = Be(m,l )
d( N,+ +P)
d(fiA+@t
(14)
m.1
For r-rsl (th e stator surf ace) the
amplitudes of the harmonics of the
radial and the tangential field
components are:
(15)
-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
4/6
543
B e ( d )=E
M[ 2 (m. l )
D2(m.i)
~ y l ]
m.1
(16)
Knowing the amplitudes
B ( m , l )
and
the space and t he time frequencies of
each harmonic component, complete
information about the air gap flux
harmonic contaminatio n is obtained.
Force
d i s t r i b u t i o n a l o n g s t a t o r
surface
Knowing th e two components of the
magnetic flux density
9
and
Be
at
the stator surface (r=rsl), the
radial and the tangential magnetic
force density distributions are
obt aine d usin g of Maxwell's stre ss
formula,
Fe
=-
(17)
cb
Substituting for & and B r using Eqs.
13,14, the Fourier series expression
for the tangential force Fe is :
Similarly the radial force density
is
:
B ~ ( m i ~ l i ) B ~ ( m i - m ~ l i - ~ - B ~ ( m i , l i ) B
~ ( m i - m , l i - l )
mi, l i
(19)
where
B
conjugates of & and Be.
and Bi are the complex
MODEL FOR CALCULATIONS
As an example of t he capability
of
this approach to provide a wide range
of information, the amplit udes and
the frequencies of the generated
harmonics can b e computed for both
the radial and the tangential flux
and force components. The flux and
the forces spectra as well as their
distributions can be plotted along
any radial surface within the
machine. The theory develop ed in
this work, has been applied to a
typical 3-phase, 4-pole cage motor
with a stator and rotor slot number
of
40
and 3 1 respectively. The spa-
tial frequency spectra of the radial
flux at th e rotor surface is shown in
Fig.
2,
while the temporal distri-
bution is shown in Fig. 3. Good
agreement of t he waveforms with those
of previous researchers is in
evidence [l-51. The spatial harmonic
spectrum is shown for the tangential
flux component at the rotor surface
in Fig.
4
and for the temporal
distribution in Fig. 5. n important
capability of this approach is the
ability of predict not only the
frequency of th e force components but
also their amplitudes. The temporal
distribution of the radial and the
tangential force components at the
stator surface are shown in Figs. 6
and
I
respectively.
CONCLUSIONS
An analytical technique has been
developed for determining the
frequencies and amplitudes of the
spatial and temporal harmonic
components of the electromagnetic
field in induction motors, and their
associated torsional and radial
forces. The relative strengths of
these harmonics are sensitive to the
geometry. The technique can be used
to facilitate the analysis of
induction motors.
REFERENCES
[l] Binns, K.J. and G. Rowlands-Rees,
Simple rules for the elimination of cogging
torque in squirrel cage induction motors .
Proc. IEE. Vol. 121, No.
1,
Jan. 1974.
[2] Binns,
K.J.
and E. Schmid, \ Some
concepts involved in the analysis of the
magnetic fields in cage induction machines .
Proc. IEE. Vol. 122, No. 2, Feb. 1975.
[3] Binns, K.J. and G. Rowlands-Rees,
Main flux pulsation h tangential tooth
ripple forces in induction mtors . IEE. Vol.
122 No. 3, March 1975.
[4]
Binns, K.J. and G. Rowlands-Rees,
Radial tooth ripple forces in induction
mtors due to the mi n flux . Proc. IEE. Vol.
125, No. 11, Nov. 1978.
[ ] Binns, K . J . and P.A. Kahan, Effect of
load on the tangential force pulsations and
harmonic torques of squirrel cage induction
motors , Proc. IEE, Vol. 128, Pt.
B ,
NO. I
July 1982.
-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
5/6
544
APPENDIX
I)
A s
a n e xa m pl e o f t h e
y
a n d t h e F
f u n c ti o n s i n
Eq 10
F(m.l)
= Js
1) Ars
6 (m )
M
where
M2= M(m-n
J)
= (m-n)N,+IN,+p I
M3=
M ( m J - n )
= I(m)N,+(l-n
) +PI
APPENDIX 11)
To w r i t e Eq.
1 0 i n t h e g e n e r a l m a t r ix
form
(Eq.
l l , t h e s i x t e r m s o f t h e
e q u a t i o n c a n be r e w r i t t e n a s f o ll o w s:
( m , l> y l ( m , l ) =
C(m-m'J-l') y l ( m . ~
m )
')
m , i
where the 6 f u n c t i o n i s d e f i n e d
as:
6(0)=1
Adding t h e t e r m s
1
t o 6 Eq. 1 0
is
c o n v er t e d t o t h e f or m:
C(m-m
J- l )
Y(mJm J ) =
F(m.0
* I
m I
R e l a t i n g t h e d o u b l e a r r a y a r gu m en ts
m- m , 1-1
t o a s i n g l e a r gu me nt n
and
m,l
t o
n ,
t he above equa t i on can
be r e w r i t t e n a s
Eq.
11.
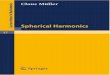
t a t o r c o r e r e g io n
4
OK s l o t s r eg io n
i r g a p r e g i o n 2)
o r s l o t s
nduc t i ng l aye l
t o r r e g io n
1)
Fi g. 1 Motor main dimen sions
-
8/10/2019 Electromagnetic Model for Evaluation of Flux Harmonics
and Resulting Magnetic Forces in Induction Motors
6/6
545
0.06
Br
ra)
I
I
esla
0 .04
0.
Br r a
Tesli
0
0.
-0.
-0.
0.w50
o.01oo 0.0150
Time
(sec)
Fi g. 3 Temporal di st r i but i on of
t he radi al f l ux densi t y.
Fi g. 2 Spat i al harmoni c spect rumof
t he radi al f l ux densi t y.
0.2
Time (sec)
Fi g. 4 Spat i al harmoni c spect rumof Fi g. 5 Temporal di st r
i but i on of
t he t angent i al f l ux densi t y. t he tangent i al f l ux
densi t y.
80000
I
-20000 1 I
0.0050
0.0100 0.0150 0.0050 0.0100 0.0150
Time
(sec)
F b - 7Temporal di st r i but i on of t he
T i m e
(sec)
Fi g. 6 Temporal di st r i but i on of t he radi al
f orce densi t y at stator surf ace.
t angent i al f orce densi t y at
st at or surf ace.