Embed Size (px)
Citation preview

EEL 6266 Power System Operation and Control
Chapter 4
Transmission System Effects

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 2
Overview
� The network’s incremental power losses causes a bias in the optimal economic scheduling of the generators� the total real power loss increases the total generation demand
� the power flow forms the basis for the development of loss factors for predicting the real power loss
� the generation schedule may need to be adjusted by shifting generation to reduce flows on transmission circuits because they would otherwise become overloaded� difficult to include the last effect into optimum dispatching
� the power flow must be solved to check for violations

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 3
The Power Flow Problem
� Power flow is the name given to a network solution that shows currents, voltages, and active & reactive power flows at every bus within the system� assumptions
� balanced system - positive sequence solution only
� simple generation and load models
� non-linear problem� relates active and reactive power consumption and generation
with voltage magnitudes
� uses� design procedures (system planning)
� study unique operating problems
� provide accurate calculations of loss penalty factors

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 4
The Power Flow Problem
� The power flow problem consist of a given transmission network� lines are represented by a pi-equivalent circuit� transformers are represented by a series impedance circuit� generators and loads represent the boundary conditions
� loads are given as active and reactive power consumptions� generators are usually described by the active power production
and the terminal voltage
� The general power flow equation� one set of equations for each bus in the network
( ) ( )( )
( ) ( )( )∑
∑
=−
=−
−−−=
−+−=
N
kkiikkiikkiiinj
N
kkiikkiikkiiinj
BGEEQ
BGEEP
1
1
cossin
sincos
θθθθ
θθθθ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 5
The AC Power Flow
� Formulation of the power flow� building the bus-admittance matrix
� modeling the transmission network of complex impedances as related to the system buses� includes line, transformer, and shunt element impedances
� general construction rule� if a branch exists between nodes i and j,
and
where j is defined for all branches connected to i
∑+=
−=
jijiii
ijij
yyY
yY
0

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 6
The AC Power Flow
� define bus characteristics based on typical information available
Power flow bus specifications
Bus Type Active Power, P
Reactive Power, Q
Voltage Magn., |E|
Voltage Angle, θθθθ
Comments
Constant Power Load, Constant Power Bus
Scheduled
Scheduled
Calculated
Calculated
Standard load representation
Load / Shunt Element, Constant Impedance
Calculated
Calculated
Calculated
Calculated
Only impedance value is given
On-Load Tap Changer, Voltage
Controlled Bus
Calculated
Calculated
Scheduled
Calculated
Secondary side of OLTC
transformers
Generator/Synchronous Condenser, Voltage
Controlled Bus
Scheduled
Calculated
Scheduled
Calculated
Standard generator
representation
Reference / Swing Generator, Slack Bus
Calculated
Calculated
Scheduled
Scheduled
Must adjust net power to hold
voltage constant

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 7
The AC Power Flow
� Non-linear system solution method� the ac power flow problem
is cast into a root finding problem
� common solution techniques� Gauss-Seidel
� first AC power flow method developed for digital computers
� method has linear convergence
� governing equation:
start
end
printresults
calculateline flows
∆Emax≤ε
solve for Ei
new=f(Pj,Ej)j=1…N
save maximumvoltage change
do for alli=1…N
i≠ref
select initial voltages
Gauss-SeidelPF Method
yesno
loop
[ ]( )T1
0
0
NxxF LM =
−−−= ∑∑
>
−
<∗−
kjjkj
kjjkj
k
kk
kkk EYEY
E
jQP
YE ]1[][
]1[
[sch][sch]][ 1 ξξ
ξξ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 8
The AC Power Flow
� Non-linear system solution techniques� common solution methods
� Newton-Raphson method� instead of treating each bus individually in each iteration, the
correction is found for the whole system
� Newton’s method is based on the idea of driving the error of a function to zero by making a correction on all the independent variables (bus voltage magnitude and angle)
• setting up the equation: f(x) = K
• pick a starting point x0: f(x0) + ε = K
• use Taylor expansion about x0: f(x0) + (df(x0)/dx) ∆x + ε = K
• setting the error to zero: ∆x = [df(x0)/dx]–1 [K – f(x0)]
� Newton’s method is an iterative process for a non-linear system of equations, but it possesses quadratic convergence to a solution
• the set of first order partial differential eq. is called the Jacobian

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 9
The AC Power Flow
� Newton-Raphson method� the set of power equations for each bus in the network
� the injected powers on the left-hand side are the knowns for a load bus
� the power mismatch or error is the difference between the left-hand and right-hand sides with a particular guess of voltages
( ) ( )( )
( ) ( )( )∑
∑
=−
=−
−−−=
−+−=
N
kkiikkiikkiiinj
N
kkiikkiikkiiinj
BGEEQ
BGEEP
1
1
cossin
sincos
θθθθ
θθθθ
( ) ( )( )
( ) ( )( )∑
∑
=−
=−
−−−−=∆
−+−−=∆
N
kkiikkiikkiiinji
N
kkiikkiikkiiinji
BGEEQQ
BGEEPP
1
][][][][][][][
1
][][][][][][][
cossin
sincos
ζζζζζζζ
ζζζζζζζ
θθθθ
θθθθ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 10
The AC Power Flow
� Newton-Raphson method� the incremental correction is defined as
� the matrix representation of the incremental correction
∑∑
∑∑
==
==
∆∂∂+∆
∂∂=∆
∆∂∂+∆
∂∂=∆
N
kk
k
iN
kk
k
ii
N
kk
k
iN
kk
k
ii
EE
QQQ
EE
PPP
1
][
1
][][
1
][
1
][][
ζζζ
ζζζ
θθ
θθ
∆∆
∆∆
∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂
∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂
=
∆∆
∆∆
−
−
−−−−−
−
−
−
n
n
nnnnnn
nnnnnn
nn
nn
n
n
E
E
EQEQQQ
EQEQQQ
EPEPPP
EPEPPP
Q
Q
P
P
1
2
1
111
1111111
2122212
1112111
1
2
1
M
L
L
MMOMM
L
L
M
θθ
θθθθ
θθθθ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 11
The AC Power Flow
� Newton-Raphson method� deriving the Jacobian terms
� off-diagonal terms
( ) ( )( )
( ) ( )( )
( ) ( )( )
( ) ( )( )kiikkiikkikk
i
kiikkiikkik
i
kiikkiikkikk
i
kiikkiikkik
i
BGEEEE
Q
BGEEQ
BGEEEE
P
BGEEP
θθθθ
θθθθθ
θθθθ
θθθθθ
−−−=∂
∂
−+−−=∂∂
−+−=∂
∂
−−−=∂∂
cossin
sincos
sincos
cossin
© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 12
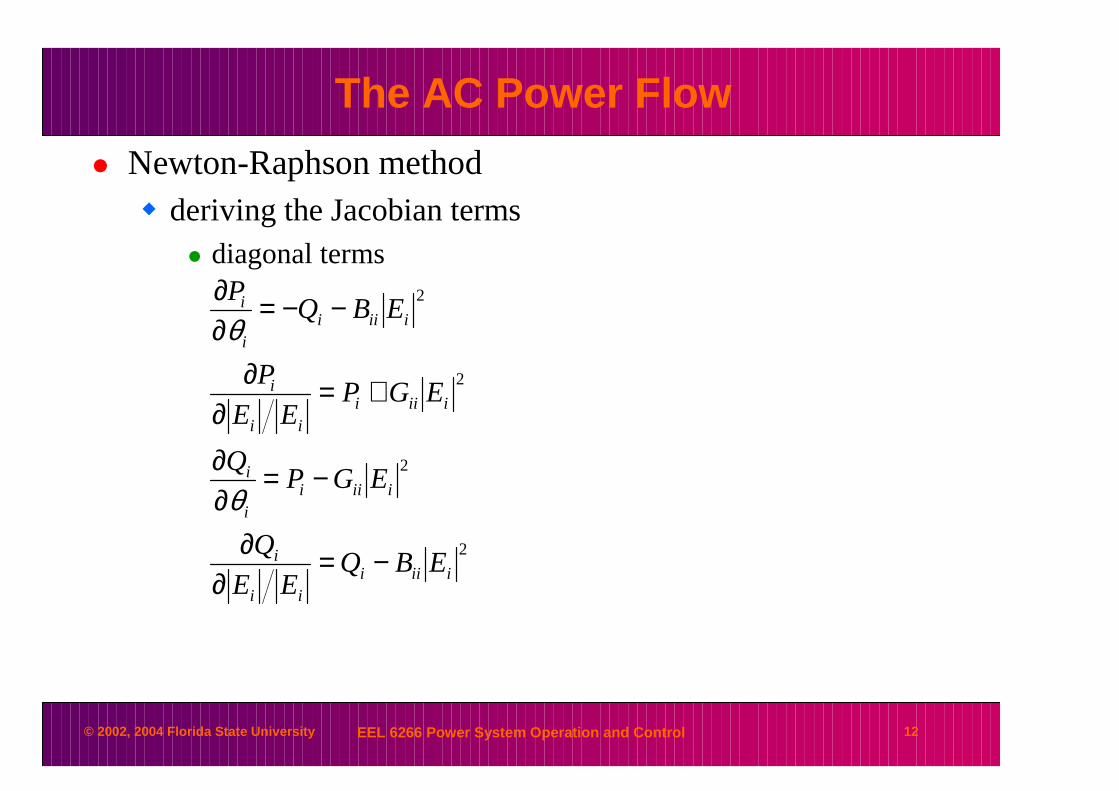
The AC Power Flow
� Newton-Raphson method� deriving the Jacobian terms
� diagonal terms
2
2
2
2
iiiiii
i
iiiii
i
iiiiii
i
iiiii
i
EBQEE
Q
EGPQ
EGPEE
P
EBQP
−=∂
∂
−=∂∂
+=∂
∂
−−=∂∂
θ
θ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 13
The AC Power Flow
� Newton-Raphson method� solving the incremental equation
� gaussian elimination is often used to solve directly for the changes in voltage magnitudes and angles instead of finding the matrix inverse of the Jacobian explicitly
� the changes in voltage magnitudes and angles are added to the values that were used at the beginning of the iteration
[ ]
∆∆
∆∆
=
∆∆
∆∆
−
−
−−
n
n
nn
nn
Q
Q
P
P
J
EE
EE 1
2
1
1
11
2
1
MM
θθ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 14
The AC Power Flow
� Newton-Raphson method� the solution process runs
according to the flowchart� note that the Jacobian
matrix is sparse
� the matrix algebra is carried out using Gaussianelimination or one of theother various numericalmethods
start
end
printresults
calculateline flows∆Pmax≤ε
∆Qmax≤ε
select initial voltage values
Newton-RaphsonPF Method
solve for ∆|E| and ∆θusing the Jacobian
and power mismatch
update voltagesθi
ξ+1= θiξ +∆θi
|Ei|ξ+1= |Ei|ξ+∆|Ei|
do for alli=1…N
i≠ref
calculate all ∆P & ∆Qform the Jacobian matrixfind max power mismatch

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 15
The AC Power Flow
� Example� three bus system
� solve the power flow Unit 165 MW1.02 pu
100 MW
Three Bus Network100 MVA base
Unit 21.05 pu
Bus 1
0.01 + j0.2
0.03 + j0.25
0.02 + j0.4
Bus 2
Bus 3

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 16
The AC Power Flow
� Non-linear system solution techniques� common solution methods
� fast-decoupled power flow� the Newton-Raphson is the most robust algorithm used in practice
� the Jacobian matrix must be recalculated for each iteration
� the set of linear equations must be resolved for each iteration
� a faster method was sought after
� simplifications in the Jacobian� in high voltage systems, the branch impedance is primarily
reactive, X >> R, X/R > 20• Bik >> Gik
� bus angles values are relatively close in value, |θi – θj| < 5°• cos(θi – θj) ≈ 1
• sin (θi – θj) ≈ 0

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 17
The AC Power Flow
� Fast Decoupled Power Flow� simplifications
� several of the off-diagonal terms tend towards zero
� the remaining off-diagonal terms can be reduced
( ) ( )( )
( ) ( )( ) 0sincos
0sincos
→=−+−−=∂∂
→=−+−=∂
∂
kiikkiikkik
i
kiikkiikkikk
i
BGEEQ
BGEEEE
P
θθθθθ
θθθθ
( ) ( )( )
( ) ( )( ) ikkikiikkiikkikk
i
ikkikiikkiikkik
i
BEEBGEEEE
Q
BEEBGEEP
−≈−−−=∂
∂
−≈−−−=∂∂
θθθθ
θθθθθ
cossin
cossin

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 18
The AC Power Flow
� Fast Decoupled Power Flow� simplifications
� several of the diagonal terms also tend towards zero
� the remaining diagonal terms can also be reduced
0
0
2
2
→=−=∂∂
→=+=∂
∂
iiiii
i
iiiiii
i
EGPQ
EGPEE
P
θ
22
22
2
iiiiiiiii
i
iiiiiiii
i
iiii
EBEBQEE
Q
EBEBQP
EBQ
−≈−=∂
∂
−≈−−=∂∂
<<
θ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 19
The AC Power Flow
� Fast Decoupled Power Flow� simplifications
� taking into account the zero terms, the incremental corrections can be rewritten as
� substituting in the reduced terms
∑
∑
=
=
∆∂
∂=∆
∆∂∂=∆
N
k k
k
kk
ii
N
kk
k
ii
E
E
EE
PP
1
][
][
1
][][
ζζ
ζζ θθ
∑
∑
=
=
∆−=∆
∆−=∆
N
k k
k
ikkii
N
kkikkii
E
EBEEQ
BEEP
1
][
][
1
][][
ζζ
ζζ θ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 20
The AC Power Flow
� Fast Decoupled Power Flow� further simplifications
� divide the terms by |Ei|
� assume |Ek| is approximately equal to one
� the equations in matrix form
∑
∑
=
=
∆−=∆
∆−=∆
N
kkik
i
i
N
kkik
i
i
EBE
Q
BE
P
1
][][
1
][][
ζζ
ζζ
θ
∆∆
−−−−
=
∆∆
−−−−
=
∆
∆
∆
∆
MOMM
L
L
MMOMM
L
L
M
][2
][1
2221
1211][
2
][1
2221
1211
2
][2
1
][1
2
][2
1
][1
ζ
ζ
ζ
ζ
ζ
ζ
ζ
ζ
θθ
E
E
BB
BB
BB
BB
EQ
EQ
EP
EP

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 21
The AC Power Flow
� Fast Decoupled Power Flow� resulting equations in general form
� where the terms in B´ and B" come from the susceptances of the bus admittance matrix terms
[ ]
[ ]
∆∆
′′=
∆∆
∆∆
′=
∆∆
MM
MM
2
1
22
11
2
1
22
11
E
E
BEQ
EQ
BEP
EP
θθ

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 22
The AC Power Flow
� Fast Decoupled Power Flow� advantages
� B´ and B" are constant� calculated once
� only B" may need to change, resulting from a generation VAR limit violation
� about 1/4 the number of terms found in the Jacobian
� disadvantages� solution convergence failure
� when underlying assumptions do not holdi.e., X/R > 20 and |θi – θj| < 5°

© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 23
“DC” Power Flow
� A significant simplification of the power flow analysis� drop the Q-V equations altogether in the fast-decoupled
approach
� results in a completely linear, non-iterative power flow algorithm
� simply assume that all voltage magnitudes, |Ei|, equal 1.0 pu
� the system equation becomes
� the terms of B´ are as described for the fast decoupled method
[ ]
∆
∆∆
′=
∆
∆∆
NN
B
P
P
P
θ
θθ
MM
2
1
2
1
© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 24
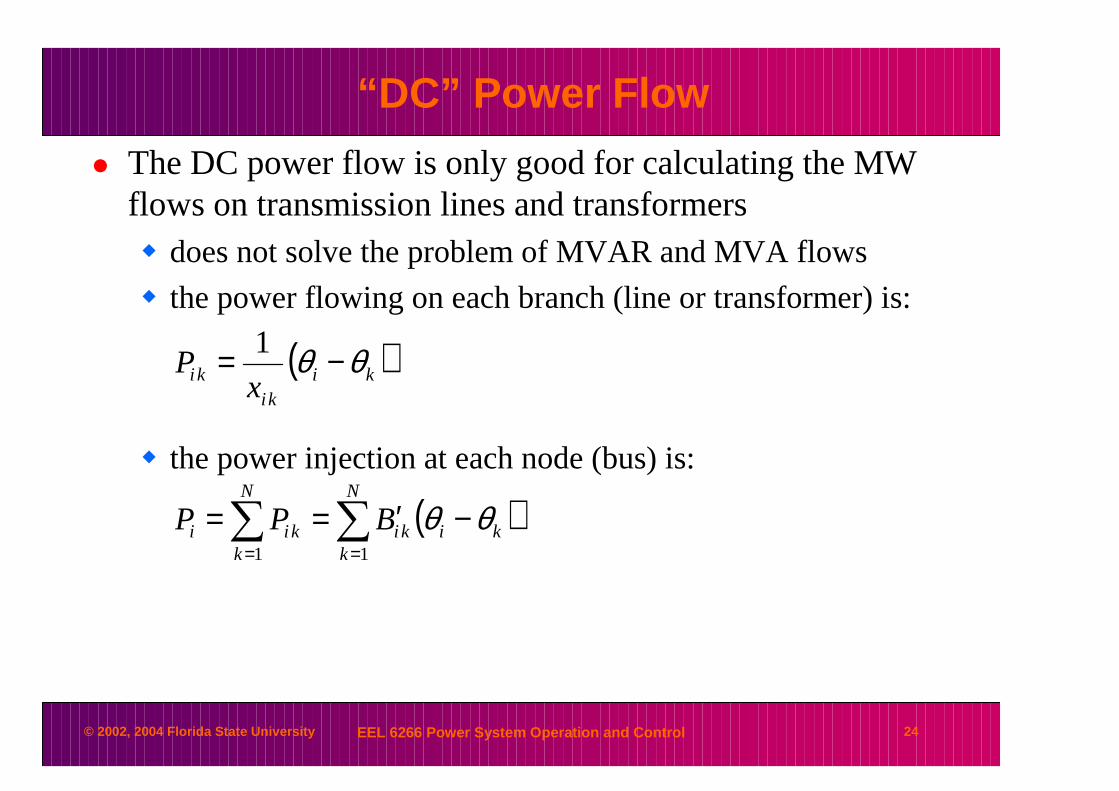
“DC” Power Flow
� The DC power flow is only good for calculating the MW flows on transmission lines and transformers� does not solve the problem of MVAR and MVA flows
� the power flowing on each branch (line or transformer) is:
� the power injection at each node (bus) is:
( )kiki
ki xP θθ −= 1
( )∑∑==
−′==N
kkiki
N
kkii BPP
11
θθ
© 2002, 2004 Florida State University EEL 6266 Power System Operation and Control 25
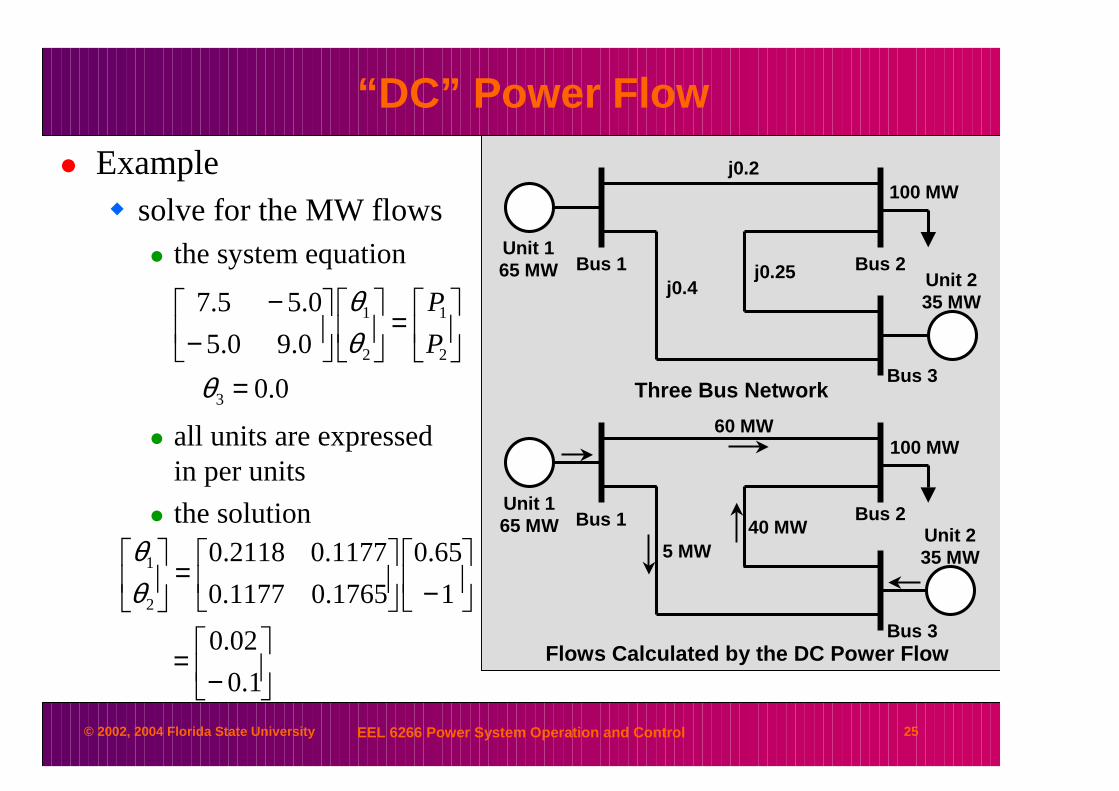
“DC” Power Flow
� Example� solve for the MW flows
� the system equation
� all units are expressedin per units
� the solution Unit 165 MW
Flows Calculated by the DC Power Flow
Unit 235 MW
Bus 1 Bus 2
Bus 3
Unit 165 MW
100 MW
60 MW
5 MW
Three Bus Network
Unit 235 MW
40 MW
Bus 1
j0.2
j0.25j0.4
Bus 2
Bus 3
100 MW
0.0
0.90.5
0.55.7
3
2
1
2
1
=
=
−−
θθθ
P
P
−=
−
=
1.0
02.0
1
65.0
1765.01177.0
1177.02118.0
2
1
θθ





























