Embed Size (px)
Citation preview

-817-
第 30 屆海洋工程研討會論文集 國立交通大學 2008 年 11 月 Proceeding of the 30th Ocean Engineering Conference in Taiwan National Chiao Tung University, November 2008
波流場中質點運動軌跡之試驗印證 李政達
1 陳陽益2 李孟學
3 許弘莒4
1 國立中山大學海洋環境及工程學系碩士 2 國立中山大學海洋環境及工程學系教授
3 國立中山大學海洋環境及工程學系博士班研究生 4 國立成功大學水工試驗所助理研究員
摘要 往昔對於造波水槽裡之質點運動軌跡的量測,常以劃有網格之透明膠片張貼於水槽透明觀
測段之後壁或前壁上,來進行拍攝被觀測的質點之位置與分析,但此方式容易受到量測儀器的
阻擋與波浪的干擾,而會發生無法分析之處,造成資料之缺漏。另外,利用攝影機拍攝時,透
鏡系統對影像也會有一定程度的變形,以致於網格上之座標位置難以判示。基此,本文將以影
像處理的方式代替傳統之辨識方式,來進行波流場中粒子運動軌跡之量測與分析的試驗研究。
本文亦修正包含光學誤差與空間誤差等影像誤差,使試驗量測值能更佳精確。由此,本研究量
測分析所得之粒子軌跡運動與理論比較之均方根誤差(RMSE)可降至 10%以下,較傳統試驗方
式之 RMSE 為小,故本研究之試驗方式與處理方法可得到較往昔者更佳良好的結果。
關鍵詞:Lagrangian、質點運動軌跡、資料處理、影像處理、誤差修正
Experiment of Particle Trajectories in Wave-Current Interaction
Cheng-Ta Lee Yang-Yih-Chen* Meng-Syue Li Hung-Chu Hsu * Professor, National Sun Yat-Sen Univ., Kaohsiung, Taiwan.
ABSTRACT
Traditionally, particle trajectories in a wave tank are measured by setting a limpid grid-film on the flume for calibration and recording by a high speed camera. This method may be sheltered by equipment and water waves, and the data loss may be occurred. In generally, the accuracy of image position is effected by wave gage, strength gage, surface line, artificial particles, ect. Besides, it is hard to obtain accurate particle postionsdue to the distoration of grid image from lens. Therefore, we can use the image treatment method to analyze the particle trajectories to adjust the image optical-error and the geometry physical error. the method presented in this paper can obtain the accurate experimental positions of particle trajectories, reduce the image error and has good agreements compared with theoretical results. The RMSE of the experimental data obtained by the present method compared with theoretical result is below 10% and up to 160% according to the traditional method.
Keywords: Lagrangian; Particle trajectory; data treatment; image treatment; error correction
一、前言 流體力學中描述流體的運動有 Eulerian 與
Lagrangian 兩種不同的方式。就物理觀點而言,
Eulerian 方式是於空間中各固定的位置點處,來觀
測恰好通過這些點處之流體質點的運動行為;而

-818-
Lagrangian 方式是針對個別的流體質點,觀測它們
於時空中運動所走過的軌跡上之運動行為。然就數
學表示而言,以 Eulerian 方式來描述流場,是直接
以時間和空間位置的函數形式表示之,即其以時間
和會被流體質點所佔的空間位置作為獨立變數,而
流場中之各物理量為因變數;而以 Lagrangian 方式
描述流場是以時間和標註流體質點的參數作為獨立
變數,而流場中之各物理量包括流體質點的軌跡位
置等皆為因變數。因此,就描述流場特性之表面直
覺上的簡便性而言,直接以時空函數形式來展現的
Eulerian 方式,當然優於以參數函數形式來間接表
現的 Lagrangian 方式,亦因此 Eulerian 方式之數學
解 析 處 理 上 較 Lagrangian 方 式 簡 單 , 反 觀 以
Lagrangian 方式來描述流場特性時,先不管其解析
求解之困難不易,而既使求得其解後,仍須多一道
將所得之參數函數再對應到以空間位置來表示之處
理。雖然如此,Lagrangian 方式可完全含括整個流
場所有特性的描述,然 Eulerian 方式卻有無法描述
流體質點的運動軌跡之虞。這兩種描述流體運動之
不同方式的優缺點,當然亦出現於流體中之波動現
象的描述裡。
往昔量測所言波動之運動軌跡,雖然早期已有
學者研究,如早期有 Morison&Crooke(1953)、近代
有 Longuet-Higgins(1986)、林受勳(1999)等,但因受
限於水槽長度不足而有反射波干擾,模擬水粒子之
顆粒大小與密度差異,及如何把放置在各深度處顆
粒在同一波相時施放,與攝影機拍攝時所生之影像
位差等困難,至今試驗的運動軌跡尚沒有與理論完
整的印證資料。雖近年來隨著質點影像測速儀
(Particle Imaging Velocimetry,P.I.V.)的發展,研究質
點運動特性的學者有漸增的趨勢,像 John Pullen ect
(1998)曾以 PIV 觀測毛細重力波之 Lagrangian 特性
的運動現象,以及徐展豪(2006)研究波浪通過不透
水潛堤之流場以 PIV 觀察懸浮粒子之運動軌跡,然
而以 PIV 的試驗方式同樣遭遇到沒有量化的軌跡資
料。
基此,往昔對流場中質點運動軌跡的量測,常
以劃有網格之透明膠片,來進行拍攝被觀測的質點
之位置與分析之方式(此網格膠片張貼於水槽透明
觀測段之後壁或前壁上,容易受到量測儀器的阻擋
與波浪的干擾,而會發生無法分析之處而缺漏)。另
外,攝影機拍攝時,透鏡系統對影像亦有一定程度
的網格變形與扭曲,以致於網格上之座標位置難以
判示與印證上的誤差。對此,陳(2006)曾在海床雷
射掃描偵蒐系統資料處理分析軟體開發上,採用影
像處理方式辨識與偵搜海床,故本文利用其所提及
影像處理之方式擷取質點座標,並分別行影像位差
修正的方式、以校正格版代替上述之傳統方式校正
辨識流場中質點運動軌跡之數據資料,大幅減少試
驗過程拍攝影像所生成之誤差,提高本文量測之精
度。以本文試驗量測者與理論相較之均方根誤差
(RMSE)來看,其誤差皆可降至 10%以下甚至更小,
較傳統試驗方式者與理論之均方根誤差 160%微小
許多,顯示本研究之試驗改進之方式,確實對質點
運動軌跡之試驗印證有較進步的結果呈現。
二、實驗設備 本試驗設備有三,第一類稱為基本設備,指一
般水工模型試驗中及必需用到的固定量測儀器,包
括:斷面水槽、造波系統、波高計等,如圖 1。第
二類是攝影裝置,本試驗擷取質點運動影像的攝影
裝備 Basler A311fc 與鹵素光源。第三是水粒子模擬
設施,採用聚苯乙烯(polystyrene,稱 PS)也就是本
文的質點,以上為採 Lagrangian 描述方式研究用的
模擬施放與試驗設備,整個實驗配置如圖 2 所示。
圖 1 造波水槽
圖 2 試驗配置圖
三、影像位差
3.1 影像位差 影像位差就是被拍攝物體之影像(即於相片或
眼底網膜中者)與物體實況間之範圍大小比率(此比
率依視角與焦距及倍率大小而定之成幾何關係),所
以事實上被拍攝物體之影像位置與其在實際中的真

-819-
實位置有所差距。此種現象,常發生於常態中的人
看到或拍攝到有水氣或煙霧瀰漫中之物體的扭曲變
位的影像,甚或者,以沙霧瀰漫的沙漠中的「海市
蜃樓」的非實物影像者為最;此乃拍攝物體影像的
過程中會遭受到很多干擾所致;一般而言,可將這
些干擾總括而概分類成光學像位差及空間像位差。
在光學像位差中有因攝影機內透鏡生成的、同時,
光線進入攝影機則會因邊緣的放大率不同而形成變
形;而空間像位差來自於攝影機視角所產生的幾何
誤差及光線經貼有網格膠片的水槽視窗與水中之折
射與反射等生成的像位差。
3.2 影像位差之探討 為了提升本試驗流場中質點運動軌跡的拍攝影
像結果的準確性與可靠程度,須先探討本試驗之影
像位差之問題所在,再研擬出有效的校正的方式,
並予以改正。
3.2.1 光學像位差 一般而言,物體之影像常受到攝影機的透鏡系
統及拍攝環境的差異而有所不同。當光線穿入鏡頭
再進入攝影機內部,光軸線(或稱視中心線)若無法
與攝影機的底片及拍攝物體保持垂直的同一直線關
係,則光線經透鏡匯傳到底片中,就將造成影像位
置的變異,這如圖 3 所示的透視變形。另一常見之
變形稱為畸變,原因來自於光源入射到鏡頭透鏡的
過程中,各入射點與光軸線的距離的遠近不同,以
致於邊緣的放大率不同而形成變形,一般而言,對
此分為桶狀變形與枕狀變形,如圖 4 所示。
圖 3 透視變形
圖 4 桶狀與枕狀變形
3.2.2 空間像位差 攝影機因為視角與像距在空間位置上的不同造
成空間像位差,以致於質點定位上將會出現一個的
誤判,再一個實際正對齊的狀況下,點 1~10 與點一
~十,在空間中是互相正對齊的,其幾何關係不因實
際拍攝與光軸線通過與否而有偏差,如圖 5。
圖 5 空間幾何示意圖
但在相片或眼底網膜上之影像卻會因距離光軸
線遠近而產生視角偏差,上圖 5 中箭頭方向設為光
軸方向,則實際拍攝網格面的影像,便如圖 6 所示
(國字為距攝影機較近之網格面且較數字更接近攝
影機,而數字則位於較遠離攝影機之網格面),對準
光軸線(八或 8)為基準,顯示越遠離校正格面之點其
座標值越小。
一 二 三 四 五
六 七 八 九 十
1 2 3 4 5
6 7 8 9 10
校正格面(在近層面)
用來比較說明的格面
(在較遠層面)
圖 6 空間像位差示意圖
圖 7 空間位差與折射示意圖
另外當光波由一媒介進入另一媒介時,會因所
處的媒介不同而發生傳播速度不同之折射作用與反
射現象進一步產生光學像位差;同樣地,當攝影機
空間
位差
折射
位差
光
軸
-820-
拍攝本試驗流場中質點運動軌跡之影像的過程之
中,光由空氣(介質 1)中進入斷面水槽之透明觀測窗
(介質 2)再進入水(介質 3)中,整個過程歷經三種介
質之折射與反射而會產生影像軌跡之偏差,如圖 7 (左邊為折射、右邊為視角位差加上折射位差)。但
是這整個空間之像位差是可被修正的。
四、影像處理與位差修正
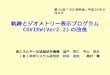
4.1 影像位差之修正 4.1.1 影像擷取
對於一個偏差的軌跡座標點進行像位差修正,
首先需以影像處理的方式擷取質點之像素座標,因
此需要率除影像內之雜訊,本文採用的是依陳(2006)方式設定一門檻值將影像二值化,處理完畢後再利
用校正格板之控制點(即格點)為紅色,其 R 值(三原色之紅色訊號)偏大 G、B(三原色之綠色、藍色訊
號)值偏小之特性,另設一門檻判斷條件來濾除椒鹽
雜訊而僅保留控制點(即格點),再以形心法或亮度
權重法擷取,如圖 8a、b,至於像位偏差待到下一
小節修正。
圖 8a 影像原圖 圖 8b 影像處理擷取圖
圖 9 修正膠片配置圖(左)、
原正對齊的格點影像間的位置差(右)
4.1.2 修正之正對齊影像 針對空間與折射、反射像位差的問題,本文利
光軸線不偏移與正對齊空間幾何不變的原理,以一
已劃有相同網格(格距 2.5cm)的二張透明膠片對齊
(即所有格點皆正對齊),一張繪有藍色格點者貼於
水槽外面之透明觀測窗上,而另一張繪有紅色格點
者貼於水中之試驗顆粒運動軌跡所在的平面板上,
並以雷色光筆與水準氣泡將攝影機調整至光軸線正
垂直於兩膠片平面,如圖 9(左)。由此拍攝二膠片影
像所得的相對關係,如圖 9 所示之原正對齊的格點
影像間的位置差(右),藉此可關係與搭配下小節之
極座標修正方式,即可校正因空間與折射、反射影
像之總和位差。
4.1.3 極座標修正方法 依照上節方式所拍攝的影像,其經透明水槽觀
測窗及水中折射、反射後的影像格點,以其在光軸
線(圖 9 右中圈內交點為光軸方向)為基點而言,其
方向角並未改變,如圖 10 所示,因此只要將這些格
點影像距基點的距離(稱本文的像距),校正成在原
狀網格中的距離,則這些格點影像就會被校正回到
原狀網格中的真實位置。做此,以此基點為極座標
之原點,而極軸為沿波浪前進方向的水平軸,今取
任一方向角θ、像距為 rp 之格點影像點,即格點影
像位置座標為( rp,θ)之影像點,然後,再與其在
原狀網格中之真實位置座標( r,θ)比對之,則真實
格點與其經空間視角與水中折射、反射作用後之影
像點間的位置距離比值說 R=r/rp 就可定出,依此,
算出所有網格點的 R 值;至於不在網格點者,則以
其距離 r 進行線性內差即可,因光線之影像是圖形
對稱於光軸線而與其方向角無關之故(參照圖 10 所
示)。
圖 10 極座標修正
由 4.1.2 與 4.1.3 之以上論述,則可精確地量化
校正本小節所言的空間(視角)與折射、反射後之影
像位差,修正後情形如圖 11a、b 所示。接著將此校
正之量化值數位存檔,以便接合到後續的影像資料
再處理,及最後的影像座標轉換成實物的真實位置
座標等之分析過程,得出精確度高的結果。
-821-
圖 11a 格點修正前 圖 11b 格點修正後
4.2 影像處理 簡言之,圖像中的影像座標是一以像素(pixel)
系統來表示,而非實況空間向量尺度常用的 SI 制。
故此二個座標系統間需利用到一個轉換關係,才能
轉換成出真實之位置座標。
4.2.1 校正格板之影像率定 事實上,要定義出兩者間的關係,需要一個已
知尺度做為兩者間之轉換,本文採用的方式為一已
知校正格版的格點間距即可定義彼此間之轉換關
係,成功轉換影像座標至成真實座標,此一校正個
版如圖 12 所示。後續再以一個預設的小矩形範圍去
搜索影像的控制點(即格點),搜索方式則為由左而
右、再由上而下的遞迴方式,當搜出控制點(即格點)的訊號後,隨即以形心法計算該小矩形內不為 0 值
的範圍之形心座標,並記錄此形心座標值做為控制
點(即格點)座標,完畢後即令該矩形區域內的其它
訊號值為 0 而去除之,依此來逐次完成各控制點(即格點)中心的擷取動作。最後將上述所得之各控制點
(即格點)進行分群,依序從左而右與由上而下的方
式排列控制點(即格點)座標,加上考慮控制點(即格
點)群於格板中分別隸屬所相對應的直線上,並考量
可能的影像扭曲,由此可分別分別求得各群控制點
(即格點)之三階迴歸曲線(稱之為擬合曲線),並以十
分逼近法(即多項式函數迴歸曲線法)逼近至該質點
的中心,找出通過該中心的迴歸曲線並求出相應的
軌跡座標,即可完成其定位,求出其在實況空間中
之真實位置座標。
圖 12 校正格版的影像率定
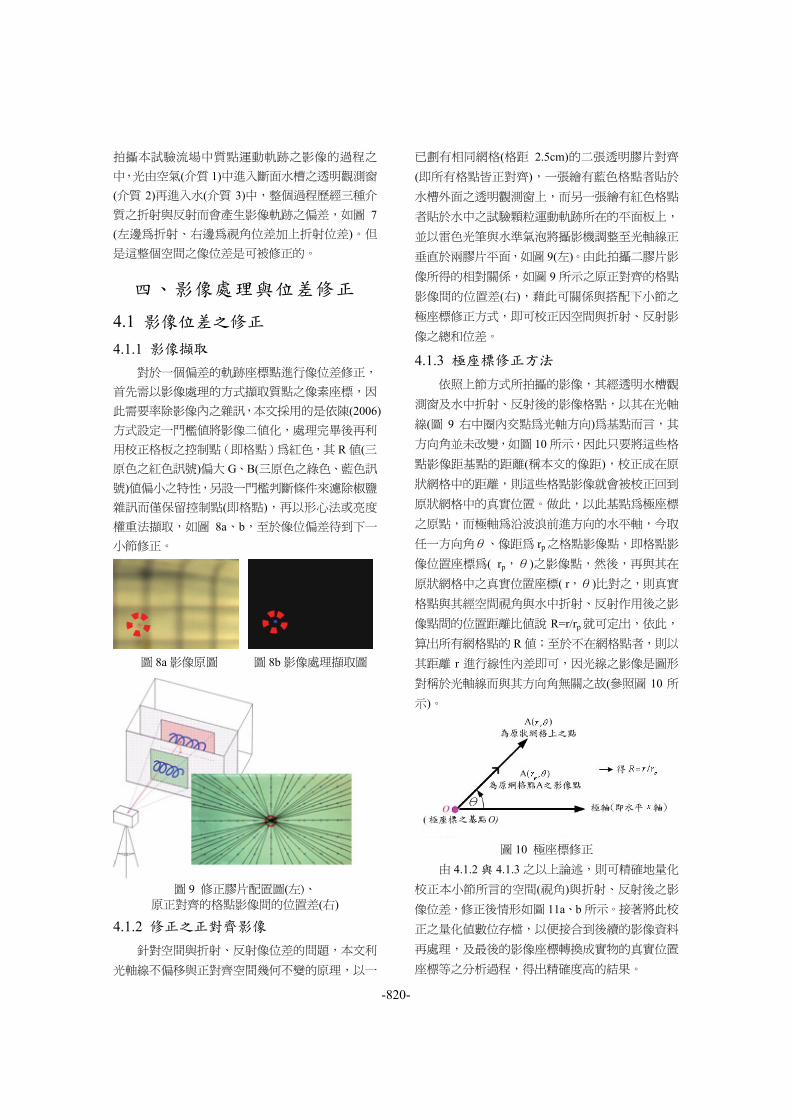
五、實際校正結果 實際校正水深(d)50cm、週期(T)1.0sec、波高
(H)3.77cm 試驗修正之結果,傳統未修正方式是指定
位質點之方式,採用定位網格(膠片)貼在水槽後側
壁之透明觀測窗上得之質點運動軌跡結果,與直接
使用校正格版和影像位差修正的本文結果比較如圖
13(左),可見本文與傳統位修正方式之差別,但將
傳統方式與採以本文之影像位差修正方式校正後,
明顯可見傳統與本文的試驗結果有非常一致的情
形,如圖 13(右)所示,因此圖 13 明顯地顯示出傳統
未校正影像位差之結果有被放大的假像,其乃因是
質點運動軌跡所在的平面距離攝影機較近而擷取定
位的網格面距離攝影機較遠,故受到空間(視角)與
水中折射、反射的效應下,質點影像落在較遠處的
網格面上,其所讀取到的位置座標並非真實正對齊
的軌跡。如圖 14 圖說,以本文所述及之處理方式與
位差修正和傳統以本文位差修正後之結果利用陳
(1994)年所提及的理論解析結果,明顯可見本文方
式相較於傳統方式之處理結果更接近理論。
進一步將試驗及理論值進行均方根誤差(Root
mean square error,簡寫為 RMSE)比較時,可得未影
像位差校正的傳統者之 RMSE 與質量傳輸位移量相
比達 130%高,而本文格版與影像校正位差方式,
可使 RMSE 值與質量傳輸位移量比值卻降至 10%以
內。
圖 13 傳統未影像位差校正者與本文比對(左) 傳統影像位差校正者與本文比對(右)
圖 14 傳統影像位差校正者與陳(1994)理論比對(左)本文位差修正者與陳(1994)理論比對(右)

-822-
圖 15 傳統方式(未修正者)與本文方式比對圖
圖 16 傳統方式(修正者)與本文方式比對圖
至於水深 (d)50cm、週期 (T)1.0sec、波高 (H) 6.703cm、流速(U) 5.592cm/sec 之試驗修正結果,同
樣以傳統膠片定位之結果與本文方式之結果比較如
圖 15 可見本文與傳統位未修正方式之差別,但將傳
統方式採以本文之影像位差修正後與本文結果相比
有非常一致的情形,如圖 16 所示,若進一步以許與
陳(2006)年所提及的理論解析結果與本文相比,同
樣可見本文處理方式相較於傳統方式更接近理論。
且其未影像位差校正的傳統者之 RMSE 與質量傳輸
位移量相比高達 135%,而本文方式之 RMSE 值與
質量傳輸位移量比值卻降至 1.42%。圖 17 與 18 顯
示採用影像處理與位差修正確實可以減少攝影過程
所產生的影像像差。
圖 17 本文方式與許陳(2006)理論比對圖
圖 18 傳統方式(修正者)與許陳(2006)理論比對圖
六、結論 本文以聚苯乙烯顆粒模擬水粒子之定性定量試
驗,搭配影像處理及位差修正方法的驗結果,與陳
(1994)及許與陳(2006)之理論所得的質點運動軌跡
兩者有很好的印証結果,顯示本文所探討的位差修
正方式與影像處理的方法,可以有效的減低影像像
差。顯示針對試驗影像採用本文之影像位差修正及
影像處理,對於質點運動軌跡與印證,確實有明顯
的改善,對於日後進行相關的影像工作研究者,若
採用此方式進行資料分析與處理,對試驗結果應有
實質上的助益。
參考文獻 1. 陳陽益(1994)「等水深中非旋轉性的自由表面前
進重力波之 Lagrangian 方式的攝動解析」,第
十六屆海洋及海岸工程研討會論文集,第 A1-29
頁。
2. 陳陽益(1994)「等深水中非旋轉性的自由表面前
進重力駐波之 Lagrangian 方式的攝動解析」,
第十六屆海洋及海岸工程研討會論文集,第
A30-59 頁。
3. 陳陽益、林受勳、何良勝(1997)「Lagrangian 方
式下之規則前進波流場試驗研究」,第二十屆
海洋及海岸工程研討會論文集,第 60-70 頁。
4. 許弘莒、陳陽益、李孟學(2006) 「Lagrangian 系
統下三維波流交互作用之理論解析」,第二十
八屆海洋工程研討會論文集,第 117-122 頁。
5. 陳伯棋(2006)海床粗糙雷射掃瞄系統資料處理
軟體分析開發,國立中山大學海下技術研究所
碩士論文。
6. John pullen et al. (1998) “Lagrangian Motions
Near the Surface of Capillary~Gravity waves With
Surface Active Films,” EuroMech 387,9 April. pp.
1-7.
7. Morison, J.R. and Crooke, R.C. (1953) “The me-
chanics of deep water, shallow water, and breaking
waves,” U.S. Army, Corps of Engineers, Beach
Erosion Board, Tech. Memo. No. 40, March.
8. Longuet-Higgins, M.S. (1986) “Eulerian and
Lagrangian aspects of surface waves,” J. Fluid
Mech. 173, pp. 533-581.

![Lab 2-3 Android Google Maps.ppt [相容模式]people.cs.nctu.edu.tw/~yi/Courses/NavigationSystems...Lab簡介簡介:路徑軌跡記錄程式路徑軌跡記錄程式 Google Maps程式技巧](https://img.dokumen.tips/doc/110x75/5ae41b277f8b9a0d7d8e8bc3/lab-2-3-android-google-mapsppt-yicoursesnavigationsystemslab.jpg)