Embed Size (px)
Citation preview

CHAPTER 1
INTRODUCTION
BORDER SECURITY USING WINS Page 1

INTRODUCTION
Wireless Integrated Network Sensors (WINS) provide distributed network and
Internet access to sensors, controls, and processors that are deeply embedded in
equipment, facilities, and the environment. The Wireless Integrated Network Sensors
(WINS) network is a new monitoring and control capability for applications in
transportation, manufacturing, health care, environmental monitoring, and safety and
security, border security. Wireless Integrated Network Sensors WINS networks provide
sensing, local control, and embedded intelligent systems in structures, materials, and
environments Wireless Integrated Network Sensors combine microsensor technology,
low power signal processing, low power computation, and low power, low cost wireless
networking capability in a compact system.
Wireless Integrated Network Sensors (WINS) combine sensing, signal processing,
decision capability, and wireless networking capability in a compact, low power system.
Compact geometry and low cost allows WINS to be embedded and distributed at a small
fraction of the cost of conventional wire line sensor and actuator systems. On a local,
wide-area scale, battlefield situational awareness will provide personnel health
monitoring and enhance security and efficiency. Also, on a metropolitan scale, new
traffic, security, emergency, and disaster recovery services will be enabled by WINS. On
a local, enterprise scale, WINS will create a manufacturing information service for cost
and quality control. WINS for biomedicine will connect patients in the clinic, ambulatory
outpatient services, and medical professionals to sensing, monitoring, and control. On a
local machine scale, WINS condition based maintenance devices will equip power plants,
appliances, vehicles, and energy systems for enhancements in reliability, reductions in
energy usage, and improvements in quality of service.
The opportunities for WINS depend on the development of scalable, low cost,
sensor network architecture. This requires that sensor information be conveyed to the
user at low bit rate with low power transceivers. Continuous sensor signal processing
must be provided to enable constant monitoring of events in an environment. Distributed
signal processing and decision making enable events to be identified at the remote sensor.
BORDER SECURITY USING WINS Page 2

Thus, information in the form of decisions is conveyed in short message packets. Future
applications of distributed embedded processors and sensors will require massive
numbers of devices. Conventional methods for sensor networking would present
impractical demands on cable installation and network bandwidth. By eliminating the
requirements for transmission of all measured data, the burden on communication system
components, networks, and human resources are drastically reduced. In this paper we
have concentrated in the most important application, Border Security.
BORDER SECURITY USING WINS Page 3

CHAPTER 2
WIRELESS INTEGRATED NETWORK SENSORS (WINS) SYSTEM
ARCHITECTURE
BORDER SECURITY USING WINS Page 4

WINS SYSTEM ARCHITECTURE
The primary limitation on WINS node cost and volume arises from power
requirements and the need for battery energy sources. As will be described, low power
sensor interface and signal processing architecture and circuits enable continuous low
power monitoring. However, wireless communication energy requirements present
additional severe demands. Conventional wireless networks are supported by complex
protocols that are developed for voice and data transmission for handhelds and mobile
terminals. These networks are also developed to support communication over long range
(up to 1km or more) with link bit rate over 100kbps.
In contrast to conventional wireless networks, the WINS network must support
large numbers of sensors in a local area with short range and low average bit rate
communication (less than 1kbps). The network design must consider the requirement to
service dense sensor distributions with an emphasis on recovering environment
information. The WINS architecture, therefore, exploits the small separation between
WINS nodes to provide multihop communication.
Multihop communication (see Figure 2) yields large power and scalability
advantages for WINS networks. First, RF communication path loss has been a primary
limitation for wireless networking, with received power, PREC, decaying as transmission
range, R, as PREC R- (where varies from 3 – 5 in typical indoor and outdoor
environments). However, in a dense WINS network, multihop architectures may permit
N communication link hops between N+ 1 nodes. In the limit where communication
system power dissipation (receiver and transceiver power) exceeds that of other systems
within the WINS node, the introduction of N co-linear equal range hops between any
node pair reduces power by a factor of N-1 in comparison to a single hop system.
Multihop communication, therefore, provides an immediate advance in capability for the
WINS narrow bandwidth devices. Clearly, multihop communication raises system
complexity. However, WINS multihop communication networks permit large power
reduction and the implementation of dense node distribution.
BORDER SECURITY USING WINS Page 5

Conventional wireless networks are supported by complex protocols that are
developed for voice and data transmission for handhelds and mobile terminals. These
networks are also developed to support communication over long range (up to 1km or
more) with link bit rate over 100kbps. In contrast to conventional wireless networks, the
WINS network must support large numbers of sensors in a local area with short range
and low average bit rate communication (less than 1kbps). The network design must
consider the requirement to service dense sensor distributions with an emphasis on
recovering environment information. Multihop communication yields large power and
scalability advantages for WINS networks. Multihop communication, therefore, provides
an immediate advance in capability for the WINS narrow Bandwidth devices. However,
WINS Multihop Communication networks permit large power reduction and the
implementation of dense node distribution. The multihop communication has been shown
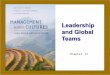
in the figure 2. The figure 1 represents the general structure of the wireless integrated
network sensors (WINS) arrangement.
Continuous operation low duty cycle
Figure 1. The wireless integrated network sensor (WINS) architecture.
The wireless integrated network sensor (WINS) architecture includes sensor, data
converter, signal processing, and control functions. Micropower RF communication
provides bidirectional network access for low bit rate, short range communication. The
micropower components operate continuously for event recognition, while the network
interface operates at low duty cycle.
BORDER SECURITY USING WINS Page 6

CHAPTER 3
WINS NODE ARCHITECTURE
BORDER SECURITY USING WINS Page 7

WINS NODE ARCHITECTURE
WINS Node Architectures development was initiated in 1993 at the University of
California, Los Angeles; the first generation of field-ready WINS devices and software
was fielded there three years later. The DARPA-sponsored low-power wireless integrated
micro sensors (LWIM) project demonstrated the feasibility of multihop, self-assembled,
wireless networks. This first network also demonstrated the feasibility of algorithms for
operating wireless sensor nodes and networks at micropower levels. In another DARPA-
funded joint development program (involving UCLA and the Rockwell Science Center of
Thousand Oaks, Calif.), a modular development platform was devised to enable
evaluation of more sophisticated networking and signal-processing algorithms and to deal
with many types of sensors, though with less emphasis on power conservation than
LWIM. These experiments taught us to recognize the importance of separating the real-
time functions that have to be optimized for low power from the higher-level functions
requiring extensive software development but that are invoked with light-duty cycles.
The WINS NG node architecture was subsequently developed by Sensor.com,
founded by the authors in 1998 in Los Angeles, to enable continuous sensing, signal
processing for event detection, local control of actuators, event identification, and
communication at low power. Since the event-detection process is continuous, the sensor,
data converter, data buffer, and signal processing all have to operate at micropower
levels, using a real-time system. If an event is detected, a process may be alerted to
identify the event. Protocols for node operation then determine whether extra energy
should be expended for further processing and whether a remote user or neighboring
WINS node should be alerted. The actuator continuously vigilant operation low-duty
cycle operation WINS node then communicates an attribute of the identified event,
possibly the address of the event in an event look-up table stored in all network nodes.
These infrequent events can be managed by the higher-level processors in the first
version of WINS NG, a Windows CE-based device selected for the availability of low-
cost developer tools. By providing application programming interfaces enabling the
viewing and controlling of the lower-level functions, a developer is either shielded from
BORDER SECURITY USING WINS Page 8

real-time functions or is allowed to delve into them as desired to improve applications
efficiency.
Future generations will also support plug-in Linux devices; other development
will include very small but limited sensing devices that interact with WINS NG nodes in
heterogeneous networks. These small devices might scavenge their energy from the
environment by means of photocells or piezoelectric materials, capturing energy from
vibrations and achieving perpetual life spans. A clear technical path exists today, offering
increased circuit integration and improved packaging. This path should produce very
low-cost and compact devices in the near future.
Low power, reliable and efficient network operation is obtained with intelligent
sensor nodes that include sensor signal processing, control, and a wireless network
interface. The signal processor described here can supply a hierarchy of information to
the user ranging from single-bit event detection, to power spectral density (PSD) values,
to buffered, real time data. This programmable system matches its response to the power
and information requirements. Distributed network sensor devices must continuously
monitor multiple sensor systems, process sensor signals, and adapt to changing
environments and user requirements, while completing decisions on measured signals.
Clearly, for low power operation, network protocols must minimize the operation duty
cycle of the high power RF communication system.
Unique requirements for the WINS node appear for sensors and micropower
sensor interfaces. The WINS network supports multihop communication (see Figure 2)
with a wireless bridge connection to a conventional wire line network service.
While unique requirements exist for low power node operation, there is a
balancing set of unique operational characteristics that permit low power operation if
properly exploited. In particular, WINS applications are generally tolerant to latency.
Specifically, in contrast to conventional wireless network applications where latency is
not tolerated, the WINS node event recognition may be delayed by 10 – 100 msec, or
longer. This permits low clock rate signal processing and architecture design that
BORDER SECURITY USING WINS Page 9

minimizes computation and communication power at the expense of latency. For
example, in the latency-tolerant WINS system, time division multiple access protocols
may be implemented to reduce communication power. Also, it is important to note that
sensor signals are generally narrowband signals (bandwidth less than 10kHz) that require
only low sample and processing rates.
Many of the primary WINS applications require sensor nodes powered by
compact battery cells. Total average system supply currents must be less than 30A to
provide long operating life from typical compact Li coin cells (2.5 cm diameter and 1 cm
thickness). In addition, these compact cells may provide a peak current of no greater than
about 1 mA (higher peak currents degrade the cell energy capacity through electrode
damage.) Both average and peak current requirements present unique challenges for
circuit design. In this paper, the requirements, architectures, and circuits for micropower
WINS systems will be described.
The WINS node architecture (Figure 1) is developed to enable continuous
sensing, event detection, and event identification at low power. Since the event detection
process must occur continuously, the sensor, data converter, data buffer, and spectrum
analyzer must all operate at micro power levels. In the event that an event is detected, the
spectrum analyzer output may trigger the microcontroller. The microcontroller may then
issue commands for additional signal processing operations for identification of the event
signal. Protocols for node operation then determine whether a remote user or neighboring
WINS node should be alerted. The WINS node then supplies an attribute of the identified
event, for example, the address of the event in an event look-up-table stored in all
network nodes. Total average system supply currents must be less than 30A. Distributed
network sensor devices must continuously monitor multiple sensor systems, process
sensor signals, and adapt to changing environments and user requirements, while
completing decisions on measured signals.
BORDER SECURITY USING WINS Page 10

Figure 2. WINS nodes (shown as disks)
For the particular applications of military security, the WINS sensor systems must
operate at low power, sampling at low frequency and with environmental background
limited sensitivity. The micro power interface circuits must sample at dc or low
frequency where “1/f” noise in these CMOS interfaces is large. The micro power signal
processing system must be implemented at low power and with limited word length. In
particular, WINS applications are generally tolerant to latency. The WINS node event
recognition may be delayed by 10 – 100 msec, or longer.
BORDER SECURITY USING WINS Page 11

CHAPTER 4
WINS MICRO SENSORS
BORDER SECURITY USING WINS Page 12

WINS MICRO SENSORS
Many important WINS applications require the detection of signal sources in the
presence of environmental noise. Source signals (seismic, infrared, acoustic and others)
all decay in amplitude rapidly with radial distance from the source. To maximize
detection range, sensor sensitivity must be optimized. In addition, due to the fundamental
limits of background noise, a maximum detection range exists for any sensor. Thus, it is
critical to obtain the greatest sensitivity and to develop compact sensors that may be
widely distributed. Clearly, microelectromechanical systems (MEMS) technology
provides an ideal path for implementation of these highly distributed systems. WINS
sensor integration relies on structures that are flip-chip bonded to a low temperature, co-
fired ceramic substrate. The sensor-substrate “Sensorstrate” is then a platform for support
of interface, signal processing, and communication circuits. Examples of WINS Micro
Seismometer and infrared detector devices are shown in Figure 3. The detector shown is
the thermal detector. It just captures the harmonic signals produced by the foot-steps of
the stranger entering the border. These signals are then converted into their PSD values
and are then compared with the reference values set by the user.
Figure 3. Thermal Infrared Detector
BORDER SECURITY USING WINS Page 13

4.1 REMOTE BATTLE FIELD SENSOR SYSTEM (REMBASS):
REMBASS is a ground-based, all-weather, day-and-night, battlefield surveillance,
target development, and early warning system capable of remote operation under field
conditions. The basic purpose of REMBASS is to detect, locate, classify, and report
personnel and vehicular (wheeled and tracked) activities in real-time within the area of
deployment. With a meteorological sensor attached, it will also sense and collect weather
information. It uses remotely monitored sensors emplaced along likely enemy avenues of
approach. These sensors respond to seismic-acoustic energy, infrared energy, and
magnetic field changes to detect enemy activities. The sensors process the data and
provide detection of classification information which is incorporated into digital
messages and transmitted through short burst transmission to the system sensor monitor
programmer set. The messages are demodulated, decoded, displayed, and recorded to
provide a time-phased record of enemy activity.
Figure 4. REMBASS
This system complements other manned/unmanned surveillance systems such as
ground surveillance radar, unmanned aerial vehicles, and night observation devices. The
system provides division, brigade, and battalion commanders with information from
beyond the forward line of own troops (FLOT), and enhances rear area protection. It can
be deployed anywhere in the world in a tactical environment in support of
reconnaissance, surveillance, and target acquisition (RSTA) operations. The system
BORDER SECURITY USING WINS Page 14

consists of eleven major components: a passive infrared (IR) sensor, magnetic (MAG)
sensor, seismic/acoustic (SA) sensor, radio repeater. Sensor Monitoring Set (SMS), radio
frequency monitor (referred to as portable monitoring set (PMS)) , code programmer,
antenna group, power supply, mounting rack, and Sensor Signal Simulator (SSS). A set
consists of eight IR sensors, eight MAG sensors, thirty-two SA sensors, eight radio
repeaters, one SMS, three PMS, two code programmers, one antenna group, one power
supply, one mounting rack, and one SSS.
(1) Magnetic Sensor: This is a hand-emplaced, MAG sensor. The MAG sensor detects
vehicles (tracked or wheeled) and personnel carrying ferrous metal. It also provides
information on which to base a count of objects passing through its detection zone and
reports their direction of travel relative to its location. The monitor uses two different
(MAG and IR) sensors and their identification codes to determine direction of travel.
(2) Seismic Acoustic Sensor: This is a hand-emplaced SA classifying sensor. It detects
targets and classifies them as unknown, wheeled vehicle, tracked vehicle, or personnel.
(3) Passive Infrared Sensor: This is a hand-emplaced, IR detecting sensor. The sensor
detects tracked or wheeled vehicles and personnel. It also provides information on which
to base a count of objects passing through its detection zone and reports their direction of
travel relative to its location. The monitor uses two different (MAG and IR) sensors and
their identification codes to determine direction of travel.
(4) Radio Repeater: This is an expendable/recoverable, digital/analog radio repeater
used to extend the broadcast range of radio messages from anti-intrusion sensors to a
monitoring set. It receives, processes and relays messages from either an anti-intrusion
sensor or another like radio repeater. Several repeaters may be used in a station-to-station
chain, one sending to another, to relay messages over a long distance.
(5) Sensor Monitoring Set: The SMS has a dual channel receiver with a permanent hard
copy recorder and a temporary visual display (TVD). The SMS receives processes,
displays, and records sensor information relating to 60 sensor ID codes. Detections and
classification are displayed as: dashes (-) for unknown targets, (T) for tracked vehicles,
(W) for wheeled vehicles, and (P) for personnel. The TVD can simultaneously display up
to ten sensor ID codes with detection or classification information. A keyboard allows the
operator to program the SMS operation: set radio frequency (RF) channels, establish hard
BORDER SECURITY USING WINS Page 15

copy recorder format, initiate system operational checks or built in test (BIT), and
calculate target speed. A separate display shows the keyboard functions and calculations.
(6) Radio Frequency Monitor: This is a single-channel PMS with a TVD. The PMS
receives, processes, and displays sensor ID codes and detection/classification messages.
(7) Code Programmer: The programmer is a portable device used to program sensors
and repeaters to the desired operating channel, ID code, mission life, arm mode, and gain.
It is also used to condition newly installed batteries in sensors and repeaters. It has a built
in visual self test to ensure the proper information programmed into the sensor or
repeater.
(8) Antenna Group: The antenna group consists of an omni directional unity gain
antenna, a mast assembly, a pre-amplifier suitable for mast mounting and an RF
multicoupler. It is used with the SMS and the PMS. Up to four monitoring devices can
use the antenna group simultaneously.
(9) Power Supply: The power supply is a custom flyback-type switching regulator that
converts external power sources (24 volts direct current (dc), 115 or 220 volts alternating
current) to 12 volts dc nominal prime power. The power supply can be used to power the
SMS, repeater or SSS.
(10) Mounting Rack: The mounting rack is an aluminum angle shock mounted rack. It is
used to mount the repeaters in helicopters.
(11) Sensor Signal Simulator (SSS): The SSS is similar in appearance to the SMS. It
has the capability to receive, record, edit, copy, and retransmit an operational scenario
involving any two of the 599 REMBASS channels. It also has the capability to transmit
pre-recorded scenarios. These functions are accomplished without any additional support
equipment. The SSS allows institutional or unit sustainment training in either a classroom
or field environment without the use of REMBASS/IREMBASS sensors. The operator
can monitor the outputs of the SSS on the PMS or SMS.
BORDER SECURITY USING WINS Page 16

CHAPTER 5
ROUTING BETWEEN NODES
BORDER SECURITY USING WINS Page 17

ROUTING BETWEEN NODES
The sensed signals are then routed to the major node. This routing is done based
on the shortest distance. That is the distance between the nodes is not considered, but the
traffic between the nodes is considered. This has been depicted in the figure 5. In the
figure, the distance between the nodes and the traffic between the nodes has been clearly
shown. For example, if we want to route the signal from the node 2 to node 4, the shortest
distance route will be from node 2 via node 3 to node 4. But the traffic through this path
is higher than the path node 2 to node 4. Whereas this path is longer in distance.
Figure 5. Nodal distance and Traffic
BORDER SECURITY USING WINS Page 18

CHAPTER 6
SHORTEST DISTANCE ALGORITHM
BORDER SECURITY USING WINS Page 19

SHORTEST DISTANCE ALGORITHM
In this process we find mean packet delay, if the capacity and average flow are
known. From the mean delays on all the lines, we calculate a flow-weighted average to
get mean packet delay for the whole subnet. The weights on the arcs in the figure 6 give
capacities in each direction measured in kbps.
Figure 6. Subnet with line capacities Figure 7.s Routing Matrix
In fig 7 the routes and the number of packets/sec sent from source to destination
are shown. For example, the E-B traffic gives 2 packets/sec to the EF line and also 2
packets/sec to the FB line. The mean delay in each line is calculated using the formula
TTi i =1/(µc-=1/(µc-λλ))
Ti = Time delay in sec
C = Capacity of the path in Bps
µ = Mean packet size in bits
λ = Mean flow in packets/sec.
The mean delay time for the entire subnet is derived from weighted sum of all the
lines. There are different flows to get new average delay. But we find the path, which has
the smallest mean delay-using program. Then we calculate the Waiting factor for each
path. The path, which has low waiting factor, is the shortest path. The waiting factor is
calculated using
BORDER SECURITY USING WINS Page 20

W = W = λλi / i / λλ
λλi = Mean packet flow in pathi = Mean packet flow in path
λλ = Mean packet flow in subnet = Mean packet flow in subnet
The tabular column listed below gives waiting factor for each path.
Figure 5. WINS Comparator response
BORDER SECURITY USING WINS Page 21

CHAPTER 7
WINS DIGITAL SIGNAL PROCESSING
BORDER SECURITY USING WINS Page 22

WINS DIGITAL SIGNAL PROCESSING
The WINS architecture relies on a low power spectrum analyzer to process all
ADC output data to identify an event in the physical input signal time series. If a stranger
enters the border, his foot-steps will generate harmonic signals. It can be detected as a
characteristic feature in a signal power spectrum. Thus, a spectrum analyzer must be
implemented in the WINS digital signal processing system. The spectrum analyzer
resolves the WINS input data into a low-resolution power spectrum. Power spectral
density (PSD) in each frequency “bins” is computed with adjustable band location and
width. Bandwidth and position for each power spectrum bin is matched to the specific
detection problem. The WINS spectrum analyzer must operate at W power level. So the
complete WINS system, containing controller and wireless network interface
components, achieves low power operation by maintaining only the micropower
components in continuous operation. The WINS spectrum analyzer system, shown in
Figure 8, contains a set of parallel filters. Mean square power for each frequency bin, is
computed at the output of each filter. Of course, the microcontroller may support
additional, more complex algorithms that provide capability (at higher power) for event
identification.
The WINS spectrum analyzer architecture includes a data buffer, shown in Figure
8. Buffered data is stored during continuous computation of the PSD spectrum. If an
event is detected, the input data time series, including that acquired prior to the event, are
available to the microcontroller. Low power operation of the spectrum analyzer is
achieved through selection of an architecture that provides the required performance and
function while requiring only limited word length. First, since high resolution
measurements of PSD are required (5 Hz bandwidth passbands at frequencies of 5 – 50
Hz with a 200 Hz input word rate) FIR filters would require an excessive number of taps
and corresponding power dissipation. In contrast, IIR filter architectures have provided
adequate resolution with limited word length.
BORDER SECURITY USING WINS Page 23

Figure 8. WINS micro power spectrum analyzer architecture.
7.1 PSD COMPARISION:
Each filter is assigned a coefficient set for PSD computation. Finally, PSD values
are compared with background reference values. In the event that the measured PSD
spectrum values exceed that of the background reference values, the operation of a
microcontroller is triggered. Thus, only if an event appears, the micro controller operates.
Buffered data is stored during continuous computation of the PSD spectrum. If an event
is detected, the input data time series, including that acquired prior to the event, are
available to the micro controller. The micro controller sends a HIGH signal, if the
difference is high. It sends a LOW signal, if the difference is low. For a reference value
of 25db, the comparison of the DFT signals is shown in the figure 9.
BORDER SECURITY USING WINS Page 24

Figure 9. Comparator plot
BORDER SECURITY USING WINS Page 25

CHAPTER 8
WINS MICROPOWER EMBEDDED RADIO
BORDER SECURITY USING WINS Page 26

WINS MICROPOWER EMBEDDED RADIO
WINS systems present novel requirements for low cost, low power, short range,
and low bit rate RF communication. Simulation and experimental verification in the field
indicate that the embedded radio network must include spread spectrum signaling,
channel coding, and time division multiple access (TDMA) network protocols. The
operating bands for the embedded radio are most conveniently the unlicensed bands at
902-928 MHz and near 2.4 GHz. These bands provide a compromise between the power
cost associated with high frequency operation and the penalty in antenna gain reduction
with decreasing frequency for compact antennas. The prototype, operational, WINS
networks are implemented with a self-assembling, multihop TDMA network protocol.
The WINS embedded radio development is directed to CMOS circuit technology
to permit low cost fabrication along with the additional WINS components. In addition,
WINS embedded radio design must address the peak current limitation of typical battery
sources, of 1mA. It is critical, therefore, to develop the methods for design of micro
power CMOS active elements. For LC oscillator phase noise power, S, at frequency
offset of away from the carrier at frequency with an input noise power, Snoise
and LC tank quality factor, Q, phase noise power is:
Now, phase noise power, Snoise, at the transistor input, is dominated by “1/f”
noise. Input referred thermal noise, in addition, increases with decreasing drain current
and power dissipation due to the resulting decrease in transistor transconductance. The
tunability of micropower CMOS systems has been tested by implementation of several
VCO systems to be discussed below. The embedded radio system requires narrow band
operation and must exploit high Q value components.
BORDER SECURITY USING WINS Page 27

CHAPTER 9
CHARACTERISTICS AND APPLICATIONS
BORDER SECURITY USING WINS Page 28

CHARACTERISTICS
The following are the characteristics of the wireless integrated network sensors
(WINS)
It supports large numbers of sensor.
Dense sensor distributions.
Low-power signal processing, computation, and low-cost wireless networking.
These sensors are also developed to support short distance RF communication.
Internet access to sensors, controls and processor is easy.
APPLICATIONS
Wireless integrated network sensors (WINS) provide distributed network and Internet
access to sensors, controls, and processors deeply embedded in equipment, facilities, and
the environment.
The WINS network represents a new monitoring and control capability for
applications in such industries as transportation, manufacturing, health care,
environmental oversight, and safety and security.
WINS combine micro sensor technology and low-power signal processing,
computation, and low-cost wireless networking in a compact system.
Recent advances in integrated circuit technology have enabled construction of far
more capable yet inexpensive sensors, radios, and processors, allowing mass
production of sophisticated systems linking the physical world to digital data
networks.
BORDER SECURITY USING WINS Page 29

CHAPTER 10
CONCLUSION
BORDER SECURITY USING WINS Page 30

CONCLUSION
A series of interface, signal processing, and communication systems have been
implemented in micropower CMOS circuits. A micropower spectrum analyzer has been
developed to enable low power operation of the entire WINS system. Thus WINS require
a Microwatt of power. But it is very cheaper when compared to other security systems
such as RADAR under use. It is even used for short distance communication less than 1
Km. It produces a less amount of delay. Hence it is reasonably faster. On a global scale,
WINS will permit monitoring of land, water, and air resources for environmental
monitoring. On a national scale, transportation systems, and borders will be monitored
for efficiency, safety, and security.
BORDER SECURITY USING WINS Page 31

CHAPTER 11
REFERENCES
BORDER SECURITY USING WINS Page 32

REFERENCES
[1] K. Bult, A. Burstein, D. Chang, M. Dong, M. Fielding, E. Kruglick, J. Ho, F. Lin, T.
H. Lin, W. J. Kaiser, H. Marcy, R. Mukai, P. Nelson, F. Newberg, K. S. J. Pister, G.
Pottie, H. Sanchez, O. M Stafsudd, K. B. Tan, C. M. Ward, S. Xue, J. Yao, “Low Power
Systems for Wireless Microsensors”, 1996 International Symposium on Low Power
Electronics and Design, Digest of Technical Papers, (1996), pp. 17-21.
[2] E. Vittoz, Design of Analog-Digital VLSI Circuits for Telecommunications & Signal
Processing, Prentice Hall, New York, 1994.
[3] M. J. Dong, G. Yung, and W. J. Kaiser, “Low Power Signal Processing Architectures
for Network Microsensors”, 1997 International Symposium on Low Power Electronics
and Design, Digest of Technical Papers (1997), pp. 173-177.
[4] A. A. Abidi, “Low-power radio-frequency ICs for portable communications”,
Proceedings of the IEEE, 83, (1995), pp. 544-69.
[5] D. B. Leeson, “A simple model of feedback oscillator noise spectra”, Proc. IEEE, 54,
(1966), pp. 329-330.
[6] J. Craninckx, M. S. J. Steyaert, “A 1.8-GHz low-phasenoise CMOS VCO using
optimized hollow spiral inductors” IEEE Journal of Solid-State Circuits, 32, (1997),
pp.736-44.
[7] B. Razavi, “A Study of Phase Noise in CMOS Oscillators”, IEEE J. of Solid-State
Circuits, 31, (1996), pp. 331-343.
[8] S. Vasudevan, A. Shaikh, “Microwave Characterization of Low Temperature Cofired
Tape Ceramic System”, Advancing Microelectronics, (1995), pp.16-25.
BORDER SECURITY USING WINS Page 33