Embed Size (px)
Citation preview

EDIC RESEARCH PROPOSAL 1
Performative Curve Network DesignMario Deuss
LGG, I&C, EPFL
Abstract—The emerging field of Architectural Geometry tack-les the new physical and performative objectives arising at large-scale constructions. An important subproblem is the decompo-sition of a design surface into produceable pieces, which hasnot only a strong impact on cost and visual quality, but alsoon statics. This research plan proposes the development of anintuitive tool to design such a decomposition by laying out cuts,the so-called curve network, incorporating higher-level objectivessuch as production cost or energy consumption.
Index Terms—architectural geometry, performative design,rationalization, paneling, curve network
I. INTRODUCTION
ADVANCES in material science, construction techniques,and design tools enable truly free forms in architecture.
Where common architecture mostly consists of large planarelements, freeform architecture makes use of a virtually un-bounded family of shapes, leaving the designer a free choicein form. While small-scale reproductions of virtual shapes caneasily fabricated in one piece by rapid-prototyping techniquessuch as 3D printing, architectural dimensions call for a morescalable approach: The freeform shape is decomposed intosmaller pieces, so-called panels, which can be fabricated withwell known methods, e.g. from the car industry. In general,
Proposal submitted to committee: January 6th, 2011; Can-didacy exam date: January 13th, 2011; Candidacy exam com-mittee: Prof. Pierre Dillenbourg (Exam president), Prof. MarkPauly (Thesis director), Prof. Pascal Fua (Co-examiner).
This research plan has been approved:
Date: ————————————
Doctoral candidate: ————————————(M. Deuss) (name and signature)
Thesis director: ————————————(M. Pauly) (name and signature)
Thesis co-director: ————————————(if applicable) (name and signature)
Doct. prog. director:————————————(R. Urbanke) (signature)
EDIC-ru/07.01.2011
this decomposition should be thought of as an arbitrary graphof cuts on the shape, which is, up to statics and productioncost, only limited by the imagination of the designing architect.Note that the cuts are usually visible on the final building, sothey are an important part of the aesthetics. See figure 1.
Fig. 1. Hungerburgbahn in Innsbruck, Austria. An illustrative curve network,in black, on a highly curved architectural freeform surface. Note how thevarying panel size and t-junctions lower the regularity.
Curve Networks: We choose to look at decompositionswhich consist of evenly spaced families of smoothly varyingcurves, the curve network. In the following, we argue that thisapproach captures a wide variety of highly regular designs.Those are challenging to achieve by hand, particularly suitedfor production, and most favorable for statics. Less regulardesigns tend to be more chaotic and therefore easier toedit locally without leaving visible traces. But more regulardesigns bear a global structure. Therefore, local edits in aregular design cause a global adjustment to ensure regularity.These adjustments potentially change previously editedregions. The construction of a regular design using localedits is therefore a very tedious and time-consuming task,especially if the necessary global adjustments have to bedone manually too. In the specific case of curve networks,the challenge can be thought of as follows: Designing a curvenetwork on a plane is easy. Starting with a single smoothcurve, its family can be constructed by simply translating itrepeatedly by the same vector. This construction breaks downon a higher genus surface, since the curves need to connectsmoothly to the network once they wrap around. Alreadythe consistent offsetting of a curve by a certain distance isnon-trivial: Imagine a plane with a single peak and a straight

EDIC RESEARCH PROPOSAL 2
line. The line’s offset is not a straight line anymore on theother side of the peak, or the offset is not constant.
Fabrication and Construction Objectives: Efficient off-sitefabrication of the panels commonly imply a number ofdesires on the curve network too: The spacing betweencurves, which corresponds to panel-size, is bounded throughavailable machinery. The nodes, where multiple panels meet,are preferably simple, such that they can be mass-produced.This would require the curves of the network to intersectat the same angle. Actually, the existing methods discussedlater all strive for a even stronger goal, namely to havethe same angle between all intersections, e.g. orthogonalones in a 2-family network. This objective facilitates theformulations and computations in their methods and serves asa reasonable starting point for our research. Also, coplanarityof a panel nodes allow to approximate the design shape byflat panels, which reduces the fabrication complexity andtherefore the production cost drastically, since they can becut out of flat material, avoiding expensive deformation steps.We will discuss a method to compute planar quad-meshesand consider including planarity as an objective in our designtool in the research plan.
Designing and Computing a Curve Network
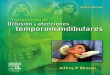
As this proposal aims at a design tool, it is important to an-ticipate an intuitive user interface and extract the requirementson the underlying algorithms. As we are designing a networkof curves, sketching parts of it is certainly a powerful inter-action. Additionally to the usual inaccuracy using interfaceslike the mouse, the touchpad or digital pens, the user will bepainting on a 2D projection of a 3D surface. A possibility tocompensate for them is to provide control over the hardnessof a constraint given by a sketched line. Generally, a curvenetwork can be constructed from a sparse set of desired lines,which are either given by the user, or extracted directly fromthe geometry, for example the estimated principal curvaturedirections or a subset of them with high confidence. Anotherimportant aspect are the singularities: Any surface of highergenus will necessarily have singularities, and those have astrong visual impact. See figure 2 for a few examples in a1-family curve network.
Fig. 2. 2d direction field singularities of different index. Left to right: -1(saddle), -1/2(tripod), +1/2 (thorn), +1(focus),+3/2(apple)
Representation of a Curve Network: A curve network couldbe thought of as just a collection of smooth curves livingon the surface. However, this representation disregards thesmooth variation and spacing which makes a curve networkvisual pleasing and accounts for the regularity discussed
before. Thinking about possible global edits, rotation andtranslation of curves, it seems more appropriate to model acurve network as a quantity defining a direction and spacingat every point of a surface. The curves are representedimplicitly as the integral lines of the directions, with distancesaccording to the spacing. This representation would supportlocal changes in direction and spacing, but care would have tobe taken of global consistency: Two integral lines starting withthe local spacing are fully defined by the directions, but theresult might differ from the spacing prescribed somewhereelse. The two quantities are coupled. Conceptually, thedirections and spacings are differential quantities describingthe curve network. Instead of performing the necessaryintegration explicitly, we can also fit a scalar function U suchthat its gradient coincides with the differential quantities. Thecurves of a family are then given by the isolevels of thisfunction U . Since the isolevels of U extracted at kd withk ∈ Z do not change if we offset the values of U by d,we can introduce discontinuities, namley jumps of height d,without changing the network. This is crutial to handle higher-genus surfaces where the gradient of U is prescribed to bealways positive around a loop, a common scenario in our case.
Relation to uv-Parametrization: The scalar function Uactually provides a 1-parametrization of the surface in everyregion without discontinuities, or a parametrization of thewhole surface if we cut it open at the discontinuities. Incase of a 2-family curve network, the scalar functions Uand V form a so-called uv-parametrization, a building blockfundamental for many methods in computer graphics, as itallows to translate methods working in a 2d plane, lets sayon paper, to the surface. This also gives us another way tosee why we need singularities. Finding an undistorted uv-parametrization of a surface S means mapping it to a plane,while preserving intrinsic distances. The gaussian curvature ofS is the natural opponent of this procedure, since it describeshow much stretching is necessary for this mapping. Concen-trating gaussian curvature in the singularities of the mappingis a common strategy to get a less distorted mapping. Actually,the gaussian curvature is also the reason why the translationof the straight line as described in the introduction leads to anon-straight line. An important subproblem of parametrizationis therefore the choice of location and type of singularities,such that the distortion is minimized. This has so far beenaddressed by heuristic procedures. An interesting approachhas recently been formulated by Bommes and Coworkers [1]in combination with quad-remeshing. Similarly to the firstrepresentation proposed above, the authors use a field ofdirection, although without spacing. They approximate theoptimal choice of singularities for an uv-parametrization byone that results in the smoothest direction field. Then, they usethese singularities in the parametrization and fit its gradientto the smooth direction field. This stresses the importanceof direction fields for uv-parametrizations and therefore curvenetworks.Section II gives an overview on direction fields and introduces
all relevant terms to discuss the first two related papers insection III. The third paper is about conical meshes and brings

EDIC RESEARCH PROPOSAL 3
Fig. 3. Left: A scalar field acting as a parametrization, right: extractedisolevels. The surface is cut open along the green line, so the jump is onlyconsistent at the ends, where the isolevels have to fit. Figure from [2]
us back closer to Architectural Geometry and serves as anexample of a domain-specific objective we propose to includeinto our design tool for curve networks.
II. DIRECTION FIELDS
Direction fields can be used for any kind of anisotropiceffects, such as hatching, oriented texture synthesis, furgeneration, or shading of brushed metal. More importantfor us, they serve as an input for quad-remeshing andparametrization methods such as Quad-Cover [3] or Mixed-Integer Quadrangulation [1] as described in III-B. Thissection formally introduces direction fields and describesa discretization on triangle meshes including all relevantquantities used the methods presented later.
Discretization: In classical Riemannian Geometry, a(tangent) direction field Θ of a smooth surface S assignsevery point p ∈ S a direction θ in the tangent space given byp and the normal n. A connection Ω describes the change indirection, a rotation, in Θ when moved an infinitesimal stepaway from p in a certain direction. The parallel transportinduced Ω of a direction along a path on S is given byintegration of those infinitesimal rotations. For more detailsrefer to [4].Care has to be taken while discretizing Θ and Ω on a triangle
Fig. 4. Left: A continuous connection determines how tangent directionsrotate along a curve. Right: a discrete connection between faces i and j canbe represented by a rotation ωij , which corresponds to the parallel transport(integral of continuous connection) of the smooth surface approximated by iand j. Figure from [4].
mesh M (we denote the whole direction field with Θ, aspecific direction at a point or sample with θ): A seeminglynatural choice of sampling locations are the vertices V ∈M .But since the normals, and therefore tangent spaces arenot defined, sampling on a per-triangle basis seems moremeaningful. Indeed we will see that this way we can representΘ implicitly with a single value θ per triangle T , while aper-vertex representation would be explicit and needs twovalues per vertex. For a triangle, its direction is encoded by
the angular polar coordinate θ in a implicit tangential frame.The frame is spanned by the first edge of T and a vectororthogonal to it, coplanar with the second edge. A connectionΩ can then be encoded per dual edge which connects totriangles. In fact, we store the integral of Ω along the dualedge, and therefore properly translate the concept of paralleltransport to the discrete domain without losing any guarantees(see figure 4).
Levi-Civita Connection: A common requirement ondirection fields is smoothness, which can be measured bylocal differences in directions. In order to compare θi ∈ Tiwith θj ∈ Tj of neighboring triangles Ti and Tj , we haveto bring them to a common frame, which can be doneby unfolding the triangles isometrically into the plane andtranslate θi to Tj and fold them back. This mapping fromTi to Tj is exactly the parallel transport by the so-calledLevi-Civita connection, and is probably the closest to anintuitive notion of straight transport.
Singularities: On surfaces of higher genus, a direction fieldcontains a few singularities, locations where the the field’sdirection is not defined. The index of a singularity encodesthe number of times by which the field rotates around thesurface. Imagine a wold sphere augmented with a directionfield always pointing towards the north pole, as a compasswould give. If someone now walk around any tree (assumingthere is no trees at the poles), their compass would not changeits direction. However, if they walk around a pole, the compasswould turn with them, once around. The singularity index ofa pole is therefore 2π respectively −2π at the other pole.Ray and Coworkers actually prove in [5], theorem 2.3, thaton a surface, the sum of singularity indices equals its Eulercharacteristic given by 2 − 2g − b, where g is the genus andb the number of borders. Note that this is a condition on thesum. Therefore, it is always possible to add two singularitieswith canceling indices.There are two fundamental qualities of a direction field: Thesingularities and the smoothness. The smoothness can bemeasured by the difference of neighboring directions in a field.In order to define this difference, a connection Ω is needed torelate neighboring tangent spaces:
|θi + ωij − θj | (1)
where zero corresponds to complete smoothness. Ω is usuallythe Levi − Civita connection. In general, there is a tradeoffbetween singularities and smoothness. Additional singularitiescan increase smoothness. In our application of architecturalcurve networks, smoothness is clearly of interest, but mightprohibit the field of following interesting highly curvedfeatures. Similarly, singularities might be placed on purposeto cause a certain design, but also be highly undesired inregions of high regularity.
N-Rotational Symmetry Fields: Often applications of direc-tion fields demand a rotational invariance. Quad-remeshingfor example, has a so-called 4-rotational symmetry, short 4-rosy. Generally, any application which does not care if some

EDIC RESEARCH PROPOSAL 4
directions get switched, a unit cross can not be distinguishedfrom a version rotated by π
4 . For anisotropic rendering, oneonly needs an orientation of the anisotropy, but no direction.This would ask for a 2-rosy field. The higher the symmetry,the more singularity types are valid: Any index k 2π
n withk ∈ Z is allowed, since any of those rotations map the fieldto symmetric and therefore undistinguishable directions. Sincethere are more singularity types to choose from, n-rosy fieldswith high n are more flexible and can be made smoother.Ray and Coworkers [5] introduce the period jump pij , whichis of the form k 1
n with k ∈ Z in order to explicitly modelthis freedom. It resolves the ambiguity how the field behavesbetween neighboring samples, and the smoothness as definedin 1 can be stated for n-rosy fields as:
|θi + ωij + pij2π
n− θj | (2)
III. RELATED WORK
To our knowledge, there is no prior work motivated bythe design of a global curve networks. However, our problembears strong similarities with uv-parametrization and (Quad)-remeshing, which allows us to build upon previous workon those topics. introduces a simple and efficient methodto compute a n-rosy field, given the desired singularitiesand some direction constraints. provides a way to efficientlyapproximate a singularity placement optimizing the overallsmoothness in a cross, or 4-rosy field. In the second part, theyuse this field to fit a uv-parametrization with all consistentjumps at cuts, which in turn provides a high-quality quad-onlyremeshing. introduces the notion of conical meshes, which areplanar quad-meshes which also have planar offset-meshes, andprovide a non-linear optimization method to compute them.
A. Trivial Connections on Discrete Surfaces
A direction field could be represented by a connection Ω andone prescribed direction θ0. All other directions can then becomputed by parallel transport of θ0 with Ω. Unfortunately,the resulting direction field normally depends on the pathalong we transport. We therefore want to aim at a trivialconnection Ω, meaning it is path-independent. This paper aimsat computing trivial connections on triangle meshes given sin-gularity locations and indices. Since there exist a lot of them,it computes the one closest to the Levi-Civita connection,which corresponds best to an intuitive notion of straightness.It introduces relevant terms from Riemannian Geometry, anda carefully choosen discretization. The resulting algorithmis relatively simple, fast (up to 400k triangles in less thana second after precomputation), guaranteed not to produceunprescribed singularities, and very robust against chance inthe geometry (see figure 6).
Basis of Loops: Imagine an arbitrary direction θx at x anda point y on a surface S. Let f and g be two arbitrary pathson S connecting x and y. Per definition, the parallel transport,or rotation r induced by a trivial connection Ω along f andg has to be equal. Therefore, the parallel transport around aloop along f and negative g, the so-called holonomy, has to be
Fig. 5. Right: Contractible (ζ) and non-contractible (ξ) loops. Left: Paralleltransport of direction θx at x to y along two different paths f and g, θfxrespectively θgy . Figure from [4].
zero. In theory, a trivial connection could therefore be foundby setting its parallel transport around every possible loop tozero. In practice, this leads to a combinatorial explosion andis infeasible. However, the authors observe that it is sufficientto enforce zero holonomy only at a basis of loops. This basisconsist of contractible loops, one around every vertex, andnon-contractible loops which encode higher-genus holonomy.There are 2g non-contractible cycles on a surface of genusg, and they can be found by a tree-cotree decompositioninvolving the computation of 2 spanning trees. Boundaries ofS are also part of the basis.
Fig. 6. The method for computing trivial connections is implicit, andtherefore highly robust against noise (center) and extreme edits (right). Figurefrom [4].
Computing a Trivial Connection: The basis is computedonce as a preprocessing step and valid as long as the mesh con-nectivity does not change. Remember that the direction fieldis discretized per triangle, thus the connection is discretizedper dual edge. On a continuous surface, the parallel transportaround a loop l is given by the integral of the connectionalong l. On a mesh M , this translates to summing the valuesof the discrete connection ω (which can in turn be interpretedas integral values of a continuous connection on the smoothsurface approximated by M ). Setting the sum of all loops inthe basis to zero results in an underconstrainted linear systemin Ω. In order to get a unique solution, they encode Ω relativeto the Levi-Civita connection and solve the convex problemof minimizing ||Ω||2 subject to the before-mentioned linearsystem.

EDIC RESEARCH PROPOSAL 5
Fig. 7. Direction field editing. Left: Two singularities, in blue. Right: Addinga sparse set of directional constraints, in red. Figure from [4].
Prescribing Singularities: The discrete homologies of thebasis loops do not have to be zero. In fact, the homology ofa contractible loop around vertex v is equal to the singularityindex of v. As mentioned in II, the sum of all singularityindices is given by the Euler characteristic, while the individualindices have to be of the form k 2π
n with k ∈ Z for aconnection of a n-rotational symmetry field. The user canchoose any index per vertex, as long as those requirementsare satisfied. Note that since the singularities are handled asa hard constraint (also the ones with index 0), the computedconnection is guaranteed to only have the desired singularities.The authors further describe how to include directional user-constraints in some faces (see figure 7), and how to weightthe importance of smoothness on a per triangle basis, e.g.proportional to its area.
B. Mixed-Integer Quadrangulation
This paper aims at high quality remeshing with quads of ashape given as a triangle mesh. Many quad remeshing methodsuse the principal curvature direction or its integral lines asa starting point. In theory they bare a few nice properties,such as orthogonal intersection at all non-umbilic points and anatural alignment along highly curved features. But estimatingprincipal curvature directions on a triangle mesh is prone tonoise and unstable in umbilic regions. A possible way to dealwith that is to smoothen the direction field, but this way welose the feature alignment property. The authors propose onlyto use a sparse set of directions from an initial estimate,namely the ones that are robust over the scale of interest(around the desired final quad length), and then find a cross-or 4-rosy field, which smoothly interpolates those estimates.Note that those directions could also be directions representingdesign intent. Using the formalism of [5] as described inequation (2), they manage to solve for the smoothest fieldincluding its singularities. The field then serves as an input tofit a uv-parametrization, respectiveley the scalar fields u and vonto the surface. The quad mesh is then given by the isolevels.
Smoothly Interpolating Crossfields: Based on equation (2),the authors formulate the following energy function to beminimized:
Esmooth :=∑eij∈E
(θi + ωij +π
2pij − θj)2 (3)
Fig. 8. Greedy rounding results in a smoother field with fewer singularities(bottom), while direct rounding yields spurious singularities and less smooth-ness (top). Figure from [1].
where Ω is the Levi-Civita connection. In fact, θi+ωij+ π2 pij
expresses θi in the tangent frame of θj . A minimum can thenbe found by setting the partial derivatives of the θs and pijs tozero. We want to find a solution with integer pijs, and real θs.This type of setup is called a mixed-integer problem, which isknown to be hard. A well-known strategy, direct rounding is tosolve the system as usual and then round the integer variables.The authors observe that its solution can significantly deviatefrom a true optimum. They propose a more elaborate strategy,which they call greedy rounding: They only round the integervariable v which causes the least round-off error, then solve forthe remaining variables assuming v to be constant. The hope isthat the round-off error is compensated for in later iterations.Clearly, this requires a lot more solutions of linear systems,namely k+1 (k: number of integer variables), compared toone only for direct rounding. However, they observe that, insparse systems typically arising in mesh processing problems,it is often sufficient to update only a small set of variables,e.g. by a local Gauss-Seidel iteration. Doing so, their roundingstrategy only creates little overhead in the systems arising intheir paper. See figure 8 for a comparison of the strategies andthe resulting fields.
Fig. 9. Results of the method on the rocker arm model. Left: uv-parametrization and singularities. Notw how the blue and red families flipas singularities. Right: the resulting quad mesh. Figure from [1].
Global uv-Parametrization: The promise is that the singu-larities of the cross-field found by the previous optimizationare a good choice for the uv-parametrization too. To allow aglobal parametrization, the mesh has to be cut open into a disctopology, and the desired singularities have to be contained in

EDIC RESEARCH PROPOSAL 6
the cut. We can then find a uv-parametrization by using thecross-field to prescribe the gradient. The orientation energy isformulated as:
Eorient :=∑Ti∈M
area(Ti)(||h∇ui − uti||2 + ||h∇vi − vti ||2)
(4)where ∇ui and ∇vi are the gradients of the fitted scalar fieldsinside the triangle, and uti, v
ti are desired gradient directions
prescribed from the cross-field. h is the desired quad edgelength. Since we want to have a pure quad mesh in the end,care has to be taken that the singularities end up at integercoordinates, such that they result in a irregular vertex insteadof a irregular polygon. This can be achieved by requiring thevariables representing the values of u and v at the singularvertex to be integer. Also, to get a proper quad mesh acrossthe cut, we have to make sure the uv-parametrization has aninteger offset along it. Enforcing this introduces new integervariables to the system and corresponding linear constraints.A minimizer is then found by setting the partial derivates ofEorient to zero and incorporating the linear offset constraints.Again, we are dealing with a mixed-integer problem, whichcan be solved using greedy rounding. Since this time thesystem is more coupled, the greedy rounding causes moreoverhead compared to direct rounding. The authors providefurther strategies to improve the resulting quad mesh: Ananisotropic norm which puts more weight on one of thedirections, or even adding constraints, can be used to alignbetter respectively perfectly along sharp edge feature. A localstiffening methods fights a locally flipped uv-parametrizationin triangles close to singularities. If the singularities givenby the cross-field are undesired, e.g. because they arecloser than the requested quad edge length, they can berelocated manually or by a local search for another placementresulting in a acceptable or even lower smoothness. Localstiffening and singularity relocation need to perform thewhole uv-parametrization iteratively and therefore slow downthe method. This results in a quality-runtime tradeoff.
Performance: The runtime of the presented method doesnot only depend on the number of triangles of the input mesh,but also the complexity of it, leading to more singularities andtherefore more integer variables during uv-parametrization.For all models shown in the paper, the methods runs for lessthan a minute. For more detailed statistics, please refer toTable 1 in the publication.
C. Geometric Modeling with Conical Meshes and Devel-opable Surfaces
Motivated by their application in Architectural Geometry,the authors develop a method to compute planar quadmeshes, short PQ-meshes, and show why they are a discretecounterpart of a so-called conjugate curve network. Amongthe same lines, they argue that PQ-meshes are not alwayssuited for architectural purposes. Therefore, they introduceconical meshes, which are a special class of PQ-meshes, andadapt their optimization to target them. The perturbation step
tries to minimally change vertex positions of a quad-meshin order to achieve the desired property. This can then bealternated with a quad-based subdivision scheme, resultingin a tool for modeling a hierarchical sequence of conicalor PQ-meshes, or also a continuous developable surfacefrom a strip of planar quads. To approximate a given designshape, the perturbation can be initialized with a (non-planar)quad-mesh derived from
PQ Perturbation: A quad Q is convex and planar if itsinterior angles αk, k = 1..4 sum up 2π. This leads to a firstobjective:
opq :=
4∑k=1
αk − 2π = 0 (5)
In case of approximating developable surfaces, the quads getvery long and thin, and cannot express the desired planarityin the limit. The authors introduce another objective odetmeasuring the coplanarity of the edges of a quad by stackingthem into a matrix and requiring the determinant to be zero.They only use odet for developable surfaces. Furthermore, theyintroduce two objectives ensuring fairness and closeness to theshape of interest. The closeness is minimized in a least-squaressense and therefore formulated as a functional over all verticesv of the mesh:
fclose :=∑i
||vi − yi||2 (6)
Where yi denotes the point closest to vi on the design surface.The fairness term avoids high-frequency ondulations of theresulting PQ-mesh around the approximated surface, and isformulated as a simplified bending energy over the row andcolumn polygons of the mesh (see figure 10):
ffair :=∑i,j
(vi+1,j−2vi,j+vi−1,j)2+(vi,j+1−2vi,j+vi,j−1)2
(7)This is a sum of squared distances of a vertex to the midpointbetween it’s too neighboring vertices in the same direction.The minimal perturbation of a quad mesh to get it planarcan then be found by a Sequential Quadratic Programmingmethod (SQP), which minimizes fclose and ffair, weightedby user specified constants, subject to the planarity constraints.However, the authors found that this method is only efficientenough to handle meshes below a thousand vertices. For biggermeshes, they convert the planarity constraint III-C to a sum ofsquares fangle, and approximate the perturbation in a leastsquares sense using a Gauss-Newton method. This usuallyconverges much faster than the SQP, but suffers of weakstability close to the minimizer, because the gradient vanishes.Close enough to the optimum, they therefore employ SQP torefine the solution.
Conical meshes: Conjugate curve networks can exhibit so-called asymptotic direction, meaning that they 2 families ofcurves can coincide in some regions. This is definitely notfavorable for architectural applications. However, principalcurvature lines form special conjugate curve networks, wherethe families intersect orthogonally, except at umbilic points,

EDIC RESEARCH PROPOSAL 7
Γ
N
12
34
Qi− 1, j− 1
Qi− 1, j
Qi, j− 1
Qi, j
Qi+1, j−1
Qi+1, j
Ni, j Ni+1, j
vi, j vi+1, j
)b()a(
vi+1 , j+1vi, j+1
Fig. 10. (a) A conical vertex. The cone of revolution Γ with axis of rotationN and angles αi. (b) Two conical vertices together with neighboring quads.Figure from [6]
where they exhibit singularities. This motivates the analysisof conical meshes, which are known to be a discretizationof principal curvature lines. A vertex is said to conical, ifall incident faces are tangent to a cone of revolution Γ (seefigure 10). One interesting property of conical meshes is theirbehavior under offsetting. A face-offset of a mesh is given byoffsetting each face along its normal by a fixed distance. Face-offsets of conical meshes are also conical and have the sameconnectivity, which is not true for PQ meshes. Offset structuresare often preferable to simple surfaces in architecture in termsof stability and isolation. The offset property implies thatboth sides of an offset structure can be built with planarelements, which in turn are cheaper to fabricate than non-planar ones. Additionally, the support for offset structures ofconical meshes can also be built by planar panels, since thecorresponding edges in the main and offset mesh can be shownto be coplanar too.A vertex of a quad mesh is conical if and only if the sums ofthe two pairs of opposite angles are equal, i.e. α1 + α3 =α2 + α4. This leads to the following per-vertex objectivecompatible with the previously described optimization for PQperturbation:
oconical := α1 + α3 − α2 − α4 (8)
which can either be incorporated as a hard constraint inSQP or a sum of squared functional in the Gauss-Newtonminimization.The authors report runtimes of 0.08 seconds for one PQperturbation, Gauss-Newton, on a strip of 336 faces, and 13seconds for 4 iterations with subdivision and perturbation witha final mesh of 5951 vertices.
IV. RESEARCH PROPOSAL: PERFORMATIVE CURVENETWORK DESIGN
Curve Network Design: The method published in [1]serves as a reasonable starting point for a design tool. Insteadof the robust principal curvature directions, we let the userprovide a sparse set of desired lines. Although the paperuses a notation restricted to cross-fields, the extensions ofthe smooth field interpolation to arbitrary n-rosy fields isstraight forward. In the uv-parametrization, the dimensionalityrepresents the nature of the 2D manifold embedded in 3Dspace. Nevertheless, we think that a extensions of this partto parametrizations and curve networks of more familiesshould be feasible. As we aim at interaction, the mixed
integer method is still too slow. As the authors also claimthat the method is very robust, a careful simplification of amesh as a preprocessing step could increase performance.Ultimately, a hierarchical top-down approach might befavorable for a designer, as he first wants to roughly layoutthe network, and then refine it where necessary. As n-rosyfields and the parametrization of surfaces are still a hottopic in computer graphics, there might be other promisingapproaches around, and there is more to come. In particular,Ray and Coworkers [7] propose a method to design vectorfields which introduces a trade-off between smoothness andsingularities, and Kaelberer anf Coworkers [3] provides amethod for quad-remeshing taking a cross-field as input.Moving away from existing work, we plan to look foralternative ways to represent a curve network. One that couldfor example easily adapt to changes in the spacing betweenline.
Performative Design: As fabrication processes andproduction in general gets more complicated, it gets harderfor the designer in a early phase of the product cycle tounderstand implications of his design decisions. In freeformarchitecture, many projects start with a fascinating conceptand design. Throughout the realization of the project, alsocalled rationalization, the design has to be changed tofulfill static, legal, and monetary requirements. The changesrequested from the side of engineers and managers haveto merged into the design again, which usually causesan expensive and long-lasting loop. The basic promise ofa performative design tool is to minimize the necessaryiterations in the process by providing the designer withadditional information and tools from early on. This wouldnot only reduce cost, but enable him to decide towards morefeasible possibilities if an uncertainty is encountered. Weargue that this might result in more pleasing products sincethe designer includes requirements in his decision, insteadof being forced to change a finished concept. Also, the toolcould not only evaluate an objective but also propose bettersolutions in a certain design space or automatically optimizefor it. This could lead to an interesting alternative in termsof form finding. In the case of curve networks, e.g. witha smoothness objective, this could mean finding the shapewhich exhibits the desired singularities in its smoothest curvenetwork.
Performative Curve Network Design: While architecturaldesign tools offer a wide variety of functionality, theperformative part is usually limited. Some tools start tooffer daylight analysis. This can help to adapt the location,facade details or even shape of a building for desired naturallighting and temperature, which in turn reduces the energyconsumption of lamps, heaters and air-conditioning. However,the tools do not react to the analysis, but leave it up to theuser to figure out how to improve the analysis results. Interms of statistics, Block and Coworkers in [8] present aninteresting method to analyze so-called masonry structures,unreinforced constructions that are held together by theirown weight. Their segmentation of the shape into blocks

EDIC RESEARCH PROPOSAL 8
that provide an equilibrium can also be described as a curvenetwork, although their vaults usually have a certain thicknesswhich would have to be captured by the curve network too.So far, we treated the architectural surface freely withoutcontext, but many of them actually are at least linked toother structures. A cladding is a structure around a building,outside of what we would call the facade. Already thisconfiguration asks for some arrangement of a curve networkin order to connect and support the cladding. If the the wholebuilding actually has a freeform shape, the curve network istightly coupled to the interior. Imagine a freeform version ofa skyscraper made of metal and glass. Such cases motivate tocouple the interior construction of a building into the problem.
Cost-optimization: Another very prominent objective iscost. The panelization algorithm proposed by Eigensatzand Coworkers in [9] perturbes a given curve network tomake as many panels as possible equivalent to others. Mass-production of panels then saves up to half of the fabricationcosts. Additionally, they respect the available productionresources for different panel types like planes, cylinders, torior cubics and include their costs into the optimization. Theperformance of their algorithm is still far from real-time, butcomputes in a few hours a panelization cheaper than the resultof half a year of manual labor. In [10] we successfully extendtheir method to handle sharp edges and local control over costand quality. Then we provide a few case studies to highlightthe practicality of our method. Since the method assumes acurve network to be given, the cost of the panelization is anobjective well-suited for a performative curve network designtool. They major challenge here is to speed up the algorithm.Also, by striving for heavier deformations than currently, thecharacter of the method could be change towards anotherapproach of form-finding, that could enable exploration of adesign space of a certain cost, or a set of available panels.
Panel types: A more evident objective is planarity orthe conical property of curve network. The objective canactually be seen as a special case of the panelizationalgorithm discussed above, where the only mass-productiontools available are cutters. Still, the proposed method andrepresentation to design curve network is implicitly embeddedin the surface. While this makes the algorithms robust againstchanges in the shape, it is also more complicated to introducean explicit objective such as planarity. Ideally we would finda way to optimize the singularity layout of a curve networksuch that the implied mesh is conical and as smooth aspossible, in the spirit of the mixed-integer quadrangulationmethod. A linear method is usually preferable because itwould not need any initial guess as a starting point. But inthe case of networks, the principal curvature direction seema reasonable starting point, since the conical meshes havebeen shown to be a discretization of just that. Building ontop of such design tool for conical curve networks, we couldstart to optimize for curve networks resulting in D-strip [11]or geodesic [12] panels: D-strips are specifically suited tobe produced by metal, while the physical behavior of longwooden panels can be approximated by geodesics.
V. SUMMARY AND CONCLUSION
This proposal first introduces the reader to the field andproblems of Architectural Geometry to motivate research oncurve networks. We explain the visual and geometrical impor-tance of smoothness and singularities, which can be capturedby direction fields or n-rosy fields. Since the regular spacingbetween network curves asks for a more rigid representation,we propose to use a scalar field per family of curves in thenetwork. Section II elaborates on direction fields, connectionsbetween tangent spaces and their discretization on trianglemeshes. Related work then shows how trivial connections canbe computed and used, how we can find optimal singular-ities in terms of smoothness and a sparse set of directionconstraints, how we can compute a uv-parametrization givena cross-field and finally introduces conical meshes as aninteresting case of a geometric property directly related tocosts in freeform architecture. The research proposal identifiesinteresting problems and challenges in the (performative)design of curve networks and introduces the idea of formfinding via higher level quantities such as singularities. Finallywe propose to include a cost objective into our tool, startingwith optimizing towards conicality of a network and thanintroducing further panel types in terms of parametrizablemolds for mass-production, or deformable material such asmetal and wood.We believe that there are many interesting, challenging andhighly relevant problems in the context of architectural curvenetworks, while the strong connection to direction fields andparametrizations make contributions very general to the fieldof computer graphics and geometry processing.
REFERENCES
[1] D. Bommes, H. Zimmer, and L. Kobbelt, “Mixed-integer quadrangula-tion,” ACM Transactions on Graphics, 2009.
[2] Y. Tong, P. Alliez, D. Cohen-Steiner, and M. Desbrun, “Designingquadrangulations with discrete harmonic forms,” SGP 2006 / ComputerGraphics Forum, 2006.
[3] F. Kalberer, M. Nieser, and K. Polthier, “Quadcover - surface pa-rameterization using branched coverings,” Computer Graphics Forum,Eurographics, 2007.
[4] K. Crane, M. Desbrun, and P. Schroder, “Trivial connections on discretesurfaces,” SGP 2010 / Computer Graphics Forum, 2010.
[5] N. Ray, B. Vallet, W.-C. Li, and B. Levy, “N-symmetry direction fielddesign,” in ACM Transactions on Graphics, 2008.
[6] Y. Liu, H. Pottmann, J. Wallner, Y.-L. Yang, and W. Wang, “Geometricmodeling with conical meshes and developable surfaces.” ACM Trans-actions on Graphics, 2007.
[7] N. Ray, B. Vallet, L. Alonso, and B. Levy, “Geometry aware directionfield processing,” ACM Transactions on Graphics, 2009.
[8] P. Block, T. Ciblac, and J. Ochsendorf, “Real-time limit analysis ofvaulted masonry buildings,” Computers and Structures, 2006.
[9] M. Eigensatz, M. Kilian, A. Schiftner, N. Mitra, H. Pottmann, andM. Pauly, “Paneling architectural freeform surfaces,” Proceedings ofACM SIGGRAPH, 2010.
[10] M. Eigensatz, M. Deuss, A. Schiftner, M. Kilian, N. Mitra, H. Pottmann,and M. Pauly, “Case studies in cost-optimized paneling of architecturalfreeform surfaces,” Advances in Architectural Geometry, 2010.
[11] H. P. A. Schiftner, P. Bo, H. Schmiedhofer, W. Wang, N. Baldassini, andJ. Wallner, “Freeform surfaces from single curved panels,” Proceedingsof ACM SIGGRAPH, 2008.
[12] H. Pottmann, Q. Huang, B. Deng, A. Schiftner, M. Kilian, L. Guibas,and J. Wallner, “Geodesic patterns,” Proceedings of ACM SIGGRAPH,2010.