Embed Size (px)
DESCRIPTION
Libro de EDO De Rosales Guia
Citation preview

1

2

ECUACIONES DIFERENCIALES ORDINARIAS
J. Juan Rosales Garcıa, Manuel Guıa Calderon
Facultad de Ingenierıa Mecanica, Electrica y ElectronicaUniversidad Autonoma de Guanajuato
18 de junio de 2007

2
DEDICATORIA
A mis hijos, Daniel y Alberto.A mis padres, Martha y Gonzalo.A Hilda Corina.A mis hermanos.A mis abuelos Q.E.D.A Jose Martınez Sandoval Q.E.D.
A todos aquellos para los cuales una respuesta son dos preguntas

3
AGRADECIMIENTOS
Los autores queremos agradecer a la Facultad de Ingenierıa Mecanica, Electrica y Electronica dela Universidad de Guanajuato por darnos el apoyo requerido en la realizacion de este trabajo.
Agradecemos a nuestros colegas y companeros del departamento de ingenierıa electrica, ingenierıaen comunicaciones y electronica, en particular a los Drs. Rene Martınez Celorio, J. Amparo AndradeLucio, Oscar Ibarra Manzano y al M.C. Mario Ibarra Manzano por el apoyo desinteresado y valiososcomentarios.
Estamos en deuda con muchos de nuestros estudiantes del curso ecuaciones diferenciales ordi-narias, en particular, agradecemos a los estudiantes; Fernando Ortız Segovia, Ezequiel MartınezAyala, Helena S. Lopez Aviles, Bladımir Ramos Alvarado, Jose Luıs Aguinaco Zuniga, por el apoyoque nos brindaron con sus crıticas y ayuda en cuestiones computacionales.

4
PREFACIO
El exito de cualquier obra es directamente proporcional a la sencillez y elegancia con que setransmite su contenido. En este libro, Ecuaciones Diferenciales Ordinarias con Aplicaciones, unode nuestros objetivos principales es mantener la simplicidad y poder comunicar a los estudiantes laimportancia que tienen las ecuaciones diferenciales en la Ciencia e Ingenierıa.
Este libro esta disenado para cursos semestrales y trimestrales en las facultades de ingenierıa.Contiene las definiciones y teoremas basicos de las ecuaciones diferenciales ordinarias. Se analizanlos metodos de solucion mas conocidos y se resuelven con todo detalle ejercicios correspondientes acada metodo. Al final de cada capıtulo se propone una serie de problemas que ayudaran al estudiantea reforzar sus conocimientos adquiridos.
La demostracion de algunos teoremas se ha omitido ya que, por un lado, nuestro enfoque esta di-rigido mas a las tecnicas de solucion y aplicaciones, que al riguroso analisis matematico y, por elotro, consideramos que el incremento de informacion no contribuye en forma decisiva al aprendizajede los estudiantes de ingenierıa.
El libro esta organizado de la siguiente manera: En el Capıtulo 1 se dan los conceptos basicosde las ecuaciones diferenciales; en el Capıtulo 2 se analizan los diferentes metodos de solucion delas ecuaciones diferenciales de primer orden, se introduce la definicion de ecuacion diferencial linealhomogenea, no homogenea y reducible a homogenea, y se ilustran los metodos de solucion. Seplantean y se resuelven con todo detalle algunos problemas. Al final de este capıtulo se pide alalumno resolver una serie de ejercicios, esto para garantizar su aprendizaje; las ecuaciones de ordensuperior, y algunas aplicaciones se analizan en el Capıtulo 3; en el Capıtulo 4 se dan los fundamentosbasicos del calculo operacional, mejor conocido como Transformada de Laplace; en el Capıtulo 5 seanalizan las ecuaciones diferenciales usando series de potencias como soluciones; en el capıtulo 6 seda una introduccion a los sistemas de ecuaciones diferenciales.
Esperamos haber podido mantener en la practica nuestra filosofıa, sencillez y elegancia, si noque el estudiante nos juzgue, y desde luego aceptaremos cualquier crıtica constructiva, para de estamanera mejorar nuestro trabajo y darle a la sociedad mejores resultados.
Los autoresJ. Juan Rosales GarcıaManuel Guıa Calderon

Indice general
1. CONCEPTOS BASICOS 9
1.1. Definicion y Caracterizacion de las EcuacionesDiferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2. Soluciones de Ecuaciones Diferenciales . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3. Problemas de Repaso del Capıtulo 1: . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN 17
2.1. Ecuaciones Diferenciales con Variables Separables . . . . . . . . . . . . . . . . . . . . 21
2.2. Ecuaciones Diferenciales Reducibles a Separables . . . . . . . . . . . . . . . . . . . . 24
2.3. Ecuaciones Diferenciales Homogeneas . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4. Ecuaciones Diferenciales Reducibles a Homogeneas . . . . . . . . . . . . . . . . . . . 33
2.5. Ecuaciones Diferenciales Cuasi-homogeneas . . . . . . . . . . . . . . . . . . . . . . . 36
2.6. Ecuaciones Diferenciales Lineales de Primer Orden . . . . . . . . . . . . . . . . . . . 40
2.7. Ecuaciones Diferenciales Reducibles a Lineales . . . . . . . . . . . . . . . . . . . . . 46
2.8. Ecuacion de Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.9. Ecuaciones Diferenciales Exactas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.10. Factor Integrante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.11. Ley de Enfriamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.12. Circuitos Electricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.13. Solucion del Circuito RL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2.14. Solucion de un Circuito RC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.15. Carga en el Condensador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
2.16. Presion Atmosferica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
2.17. Ecuaciones Diferenciales no Resueltas Respectoa la Derivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5

6 INDICE GENERAL
2.18. Ecuaciones Diferenciales de Lagrange y Clairaut . . . . . . . . . . . . . . . . . . . . 77
2.19. Isoclinas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.20. Trayectorias Ortogonales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
2.21. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
2.22. Problemas de Repaso del Capıtulo 2: . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR 121
3.1. Ecuaciones Diferenciales de Orden Superior . . . . . . . . . . . . . . . . . . . . . . . 122
3.2. Ecuaciones de Orden Superior Reducibles a PrimerOrden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
3.3. Ecuaciones Diferenciales Lineales de Orden Superior . . . . . . . . . . . . . . . . . . 129
3.4. Ecuaciones Lineales con Coeficientes Constantes . . . . . . . . . . . . . . . . . . . . 137
3.5. Ecuaciones Diferenciales Lineales no Homogeneas deSegundo Orden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
3.6. Variacion del Parametro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
3.7. Ecuaciones de Cauchy-Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
3.8. Vibraciones Mecanicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
3.9. Solucion para el Movimiento Libre no Amortiguado . . . . . . . . . . . . . . . . . . . 165
3.10. Soluciones Para las Oscilaciones Forzadasno Amortiguadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
3.11. Circuito Electrico RLC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
3.12. Oscilaciones Libres del Circuito RLC . . . . . . . . . . . . . . . . . . . . . . . . . . 170
3.13. Solucion General del Circuito RLC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
3.14. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
3.15. Problemas de Repaso del Capıtulo 3: . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
4. TRANSFORMADA DE LAPLACE 179
4.1. Conceptos Basicos de la Transformada de Laplace . . . . . . . . . . . . . . . . . . . 180
4.2. Transformada de Laplace de Algunas FuncionesElementales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
4.3. Transformada de Laplace para las Derivadas . . . . . . . . . . . . . . . . . . . . . . . 193
4.4. Transformada Inversa de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
4.5. Funciones Racionales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
4.6. Solucion de Ecuaciones Diferenciales: Metodo de Laplace . . . . . . . . . . . . . . . . 199

INDICE GENERAL 7
4.7. Transformada de Laplace para Funciones Discontinuas . . . . . . . . . . . . . . . . . 205
4.8. Diferenciacion e Integracion de la Transformadade Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
4.9. Ecuaciones Diferenciales con Fuentes Discontinuas . . . . . . . . . . . . . . . . . . . 214
4.10. Ecuaciones Diferenciales con Impulsos . . . . . . . . . . . . . . . . . . . . . . . . . . 221
4.11. Transformada de Laplace de la Funcion Delta de Dirac . . . . . . . . . . . . . . . . . 222
4.12. Teorema de Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
4.13. Problemas de Repaso para el Capıtulo 4: . . . . . . . . . . . . . . . . . . . . . . . . . 231
5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA 233
5.1. Series de Potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
5.2. Intervalo y Radio de Convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
5.3. Propiedades de las Series de Potencias . . . . . . . . . . . . . . . . . . . . . . . . . . 235
5.4. Derivadas de las Series de Potencias . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
5.5. Series e Integracion de Ecuaciones Diferenciales . . . . . . . . . . . . . . . . . . . . . 237
5.6. Integracion de Ecuaciones Lineales Mediante Series de Potencias . . . . . . . . . . . 239
5.7. Soluciones Alrededor de Puntos Ordinarios . . . . . . . . . . . . . . . . . . . . . . . 242
5.8. Ecuacion Diferencial de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
5.9. Polinomios de Hermite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
5.10. Condiciones Suficientes para la Existencia de Soluciones en Serie Potencias. . . . . . 250
5.11. Ecuacion Diferencial de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
5.12. Polinomios de Legendre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
5.13. Series Generalizadas: Metodo de Frobenius . . . . . . . . . . . . . . . . . . . . . . . 254
5.14. Ecuacion Indicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
5.15. Ecuacion Diferencial de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
5.16. Funciones de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
5.17. Propiedades de la funcion Jν(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
5.18. Funciones de Bessel Fraccionarias, ν = ± 12 ,±
32 ,±
52 . . . . . . . . . . . . . . . . . . 262
5.19. Funciones de Bessel de segunda clase . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
5.20. Funciones de Bessel de Segunda Clase Yn(x) . . . . . . . . . . . . . . . . . . . . . . . 266
5.21. Problemas de Repaso del Capıtulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
6. SISTEMAS DE ECUACIONES DIFERENCIALES 269

8 INDICE GENERAL
6.1. Sistemas de Ecuaciones Diferenciales Ordinarias . . . . . . . . . . . . . . . . . . . . . 269
6.2. Valores Propios y Vectores Propios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286
6.3. Sistemas de Ecuaciones Lineales Homogeneos . . . . . . . . . . . . . . . . . . . . . . 289
6.4. Aplicaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
6.5. Problemas de Repaso del Capıtulo 6: . . . . . . . . . . . . . . . . . . . . . . . . . . . 303

Capıtulo 1
CONCEPTOS BASICOS
Las Matematicas son el Idiomacon el cual DIOS Escribio el UniversoGalileo Galilei
La Ciencia jamas podra descubrirtodos los secretos de la Naturaleza
ya que la Ciencia la hacen los Hombresy estos son parte de Ella
J. Juan Rosales Garcıa
Antes de empezar con los diferentes metodos para resolver las ecuaciones diferenciales, definire-mos que es lo que vamos a entender por ecuacion diferencial en la forma mas general y como lavamos a caracterizar.
1.1. Definicion y Caracterizacion de las EcuacionesDiferenciales
Una ecuacion que establece una relacion entre la variable independiente x, la funcion dependientey = f(x) y sus derivadas y′, y′′, ..., y(n) se llama ecuacion diferencial . Simbolicamente, se escribe dela siguiente manera
F(x, y, y′, y′′, ..., y(n)
)= 0 (1.1)
donde las derivadas se toman respecto a la variable independiente x, es decir, y′ = dy/dx, ..., y(n) =dny/dxn .
Si la funcion y = f(x) y sus derivadas dependen de una sola variable independiente, entonces,decimos que la ecuacion diferencial es una ecuacion diferencial ordinaria EDO .
Si, por el contrario, la funcion y = f(x, z, ...) y sus derivadas dependen de mas de una variableindependiente, diremos que es una ecuacion diferencial en derivadas parciales EDP. De tal maneraque existen dos tipos de ecuaciones diferenciales: las ordinarias y las parciales.
9

10 CAPITULO 1. CONCEPTOS BASICOS
El orden de la derivada superior que aparece en la ecuacion es el orden, mientras que el gradose define como el exponente de la derivada de mayor orden. Ası, la ecuacion (1.1) representa unaecuacion diferencial ordinaria de orden n y grado uno.
Las ecuaciones diferenciales tambien se distinguen por su linealidad y no linealidad. Para esto,supongamos que en la ecuacion (1.1) podemos despejar la derivada de orden maximo, y(n), esto es:
y(n) = f(x, y, y′, y′′, ..., y(n−1)
)(1.2)
entonces, decimos que una ecuacion diferencial, de la forma (1.2), es una ecuacion diferencial linealsi f es una funcion lineal de y, y′, y′′, ..., y(n−1). En otras palabras, una ecuacion diferencial es linealsi es posible escribirla de la siguiente manera
an(x) dnydxn + an−1(x) dn−1y
dxn−1 + ....+ a1(x) dydx + a0(x)y = g(x) (1.3)
donde los coeficientes ai(x) (i = 0, 1, 2, ..., n) son funciones continuas de la variable independientex en un cierto intervalo (a, b). Si en (1.3) la funcion g(x) = 0, entonces, decimos que la ecuaciones una ecuacion diferencial lineal homogenea de orden n, en caso contrario, si g(x) 6= 0, diremosque es una ecuacion diferencial lineal no homogenea . Si los coeficientes ai(x) (i = 0, 1, 2, .., n) sontodos constantes, entonces la ecuacion (1.3) representa una ecuacion diferencial lineal con coeficientesconstantes.
Desde el punto de vista practico la parte izquierda, de la ecuacion (1.3), representa a un sis-tema, sea cual sea, donde hay ciertos cambios (debidos a friccion, desintegracion, caıdas de voltaje,viscosidad etc.,) y la parte derecha de la ecuacion representa la fuente (lo que se suministra al sis-tema, puede ser voltaje, corriente, una fuerza, etc.). Resolver la ecuacion (1.3), significa, entonces,hallar la funcion que representara el resultado del proceso, es decir, nos dara informacion sobre elcomportamiento del sistema.
Ejemplo 1:
Las ecuacionesy′ + 4x2y = 3x2 + 2x− 5, (1.4)
y′ − xy = 0, (1.5)
y′′ + 5y′ + 3y = x2 − 1, (1.6)
son, todas, ecuaciones diferenciales ordinarias de primer y segundo orden y grado uno. La ecuacion(1.4) es una ecuacion diferencial lineal no homogenea, mientras que la ecuacion (1.5) es una ecuaciondiferencial homogenea. Finalmente, la ecuacion (1.6) es una ecuacion diferencial lineal no homogeneade segundo orden.
Ejemplo 2:
Las ecuaciones
y∂u(x, y)∂y
+ x∂u(x, y)∂x
= 0, (1.7)
t∂u(x, t)∂t
+ x∂u(x, t)∂x
= u(x, t), (1.8)

1.2. SOLUCIONES DE ECUACIONES DIFERENCIALES 11
∂2u(x, y)∂x∂y
= x+ y, (1.9)
son ecuaciones diferenciales parciales de primer orden (1.7), (1.8), y la ecuacion (1.9), es de segundoorden.
Ejemplo 3:
Las ecuacionesy′ = xy1/2, (1.10)
yy′′ − 4y′ + y = x− 3, (1.11)
y′′′ + y4 = 0, (1.12)
son ecuaciones diferenciales ordinarias no lineales de primero, segundo y tercer orden, respectiva-mente. La ecuacion (1.10), es de grado dos, ya que (y′)2, las dos ecuaciones restantes son de gradouno.
1.2. Soluciones de Ecuaciones Diferenciales
Toda funcion y = φ(x), definida en un intervalo (a, b), que satisface una ecuacion diferencial sellama solucion o integral de la ecuacion diferencial dada.
La solucion general de una ecuacion diferencial es una familia de curvas o funciones que contienetantos parametros arbitrarios como sea el orden de la ecuacion diferencial. Es decir, la soluciongeneral de una ecuacion de primer orden F (x, y, y′) = 0 tendra como solucion general a la familia decurvas representada por Φ(x, y, c) = 0, donde c es el parametro arbitrario (familia uniparametrica),tal que, cada termino de la familia es una solucion de la ecuacion diferencial. Ası, al resolver unaecuacion diferencial de orden n, es decir, F (x, y, y′, ..., y(n)) = 0, esperamos obtener una familia n-parametrica de soluciones Φ(x, y, c1, ..., cn) = 0, donde ci(i = 1, 2, ..., n) son parametros arbitrarios.
La solucion de una ecuacion diferencial que no contiene parametros arbitrarios se llama solu-cion particular . Una manera de obtener una solucion particular es elegir valores especıficos delparametro(o de los parametros) en una familia de soluciones. En el caso en que se analice un sistemareal estos parametros se obtienen de las condiciones iniciales en que se encuentra el sistema.
Hay ocasiones en que una ecuacion diferencial tiene una solucion que no puede obtenerse dandovalores especıficos a los parametros en una familia de soluciones; a esta solucion se le llama solucionsingular .
Ejemplo 1:
La funcion y = (x2/4 + c)2 es solucion de la ecuacion y′ = xy1/2. Cuando c = 0, la solucionparticular es y = x4/16. En tal caso, la funcion y ≡ 0 es una solucion singular de la ecuacion, ya queno puede ser obtenida de la familia para ningun valor del parametro c. Otra manera de ver esto esla siguiente: Si la solucion y = x4/16 la escribimos como 16 = x4/y y luego hacemos y ≡ 0, tenemosuna indeterminacion, lo cual implica que la solucion y ≡ 0 es una solucion singular de la ecuaciony′ = xy1/2.
Ejemplo 2:
Dada la funcion
y(x) = ce−2x +13ex, (1.13)

12 CAPITULO 1. CONCEPTOS BASICOS
demostrar que esta es solucion de la ecuacion diferencial
y′ + 2y = ex. (1.14)
Solucion:
Para demostrar que efectivamente la funcion (1.13) es solucion de la ecuacion (1.14), debemossustituir (1.13) en (1.14). Tenemos que la derivada de (1.13), es
y′(x) = −2ce−2x +13ex. (1.15)
Sustituyendo esta expresion y (1.13) en (1.14), obtenemos
−2ce−2x +13ex + 2ce−2x +
23ex =
13ex +
23ex = ex. (1.16)
El tener la igualdad ex = ex, implica que la funcion (1.13) es la solucion general de la ecuaciondiferencial (1.14). De la solucion general (1.13), podemos obtener una solucion particular de laecuacion diferencial (1.14). Supongamos que cuando x = 0, y = 2. Sustituyendo estos valores en lasolucion (1.13), obtenemos
2 = c+13
→ c =53. (1.17)
Luego, poniendo el valor de c en (1.13), obtenemos la solucion particular de la ecuacion (1.14),
y(x) =53e−2x +
13ex. (1.18)
El haber restringido la solucion general a una solucion particular, quiere decir que la curva repre-sentada por la ecuacion (1.18), pasa por el punto (0, 2).
Ejemplo 3:
Dada la funciony(x) = c1x+ c2x lnx+ 2x3, (1.19)
demostrar que esta es la solucion general de la ecuacion diferencial
x2y′′ − xy′ + y = 8x3. (1.20)
Solucion:
Derivando dos veces la funcion (1.19), obtenemos
y′ = c1 + c2 lnx+ c2 + 6x2 → y′′ =c2x
+ 12x. (1.21)
Sustituyendo estas dos expresiones y (1.19) en la ecuacion (1.20), tenemos
x2(c2x
+ 12x)− x[c1 + c2 lnx+ c2 + 6x2] + c1x+ c2x lnx+ 2x3 =
12x3 − 6x3 + 2x3 = 8x3. (1.22)
Lo cual implica que la funcion (1.19) es la solucion general de la ecuacion (1.20).
Ejemplo 4:
Demostrar que para toda constante c la funcion
y = arc tg(x+ y) + c, (1.23)

1.2. SOLUCIONES DE ECUACIONES DIFERENCIALES 13
satisface la ecuaciondy
dx=
1(x+ y)2
. (1.24)
Solucion:
Diferenciando la funcion (1.23), tenemos
dy
dx=
1 + dydx
1 + (x+ y)2→ [1 + (x+ y)2]
dy
dx= 1 +
dy
dx→ [1 + (x+ y)2 − 1]
dy
dx= 1. (1.25)
Esta ultima expresion la podemos escribir como
dy
dx=
1(x+ y)2
. (1.26)
De las ecuaciones (1.24) y (1.26), concluimos que la funcion (1.23), es solucion de la ecuacion (1.24).
Podemos hacer el caso inverso, es decir, supongamos que conocemos la familia de curvas ydeseamos conocer la ecuacion diferencial correspondiente. Este tipo de problemas surgen a menudoen las ciencias e ingenierıas.
Ejemplo 5:
Dada la familia de curvasx2 + y2 − cx = 0, c ∈ R, (1.27)
hallar su correspondiente ecuacion diferencial.
Solucion:
Considerando a y como una funcion de x, y diferenciando (1.27), respecto a x, tenemos
2x+ 2ydy
dx− c = 0. (1.28)
Luego, de la ecuacion (1.27), despejamos a la constante c
c =x2 + y2
x. (1.29)
Sustituyendo este resultado en (1.28), obtenemos
2x+ 2ydy
dx− x2 + y2
x= 0 → 2yx
dy
dx+ 2x2 − x2 − y2 = 0. (1.30)
Finalmente, tenemos que la ecuacion diferencial que representa a la familia de curvas (1.27), tienela forma
2xydy
dx+ x2 − y2 = 0. (1.31)
En otras palabras, la familia de curvas (1.27) es la solucion de la ecuacion diferencial (1.31).
Ejemplo 6:
Hallar la ecuacion diferencial que represente a la familia de curvas
x− y − cex
y−x = 0. (1.32)
Solucion:

14 CAPITULO 1. CONCEPTOS BASICOS
Escribamos la ecuacion (1.32), de la siguiente manera
(x− y)ex
x−y = c. (1.33)
Diferenciando esta expresion respecto a x, tenemos
(1− dy
dx
)e
xx−y + (x− y)
[x− y − x(1− dydx )
(x− y)2]e
xx−y = 0. (1.34)
La expresion ex
x−y 6= 0, entonces, lo que debe ser cero es
1− dy
dx+x− y − x+ x dy
dx
x− y= 0 → 1− dy
dx+x dy
dx − y
x− y= 0. (1.35)
Esta ultima ecuacion la podemos escribir como
x− y − (x− y)dy
dx+ x
dy
dx− y = 0 → x− 2y − (x− y − x)
dy
dx= 0. (1.36)
Finalmente, tenemos la ecuacion diferencial que representa a la familia de curvas (1.32),
ydy
dx− 2y + x = 0. (1.37)
Ejemplo 7:
Hallar la ecuacion diferencial que describe una familia de parabolas, las cuales pasan por el orıgende coordenadas y su eje de simetrıa es el de las ordenadas.
Solucion:
La ecuacion que representa a la familia de parabolas con eje de simetrıa en las ordenadas es
y = cx2, c ∈ R. (1.38)
Diferenciando esta expresion respecto a x, obtenemos
dy
dx= 2cx. (1.39)
De (1.38), despejamos a c y la sustituimos en (1.39),
c =y
x2→ dy
dx= 2
y
x2x = 2
y
x. (1.40)
Entonces, la ecuacion diferencial esdy
dx− 2y
x= 0. (1.41)
Observacion:
Las ecuaciones diferenciales no lineales, a excepcion de algunas de primer orden, son generalmentedifıciles o imposibles de resolver en terminos de las funciones elementales(funciones trigonometricas,funciones exponenciales y logarıtmicas, y funciones trigonometricas inversas). Ademas, si tuvieramosuna familia de soluciones de una ecuacion diferencial no lineal, no es obvio cuando esta familia formauna solucion general. Las ecuaciones no lineales son muy sensibles a las condiciones iniciales. De talmanera, que el nombre de solucion general se aplica solo a ecuaciones diferenciales lineales.

1.3. PROBLEMAS DE REPASO DEL CAPITULO 1: 15
1.3. Problemas de Repaso del Capıtulo 1:
1.1.-) En los siguientes ejercicios diga si las ecuaciones dadas son lineales o no lineales.Indique el orden y el grado de la ecuacion:
1. xy′ + y = y2.
2. xdxdt + t = 1.
3. y′ − y = 2x− 3.
4. y′ =
√1 +
(d2ydx2
)2
5. d2xdt2 + α
x2 = 0.
6. (1− y2)dx+ xdy = 0.
7. xy′ + 1 = ey.
8. y(y′)2 + 2xy′ = y + 1.
9. xy2dy + y3dx = dxx .
10. y′(x+ y) = y.
1.2.-) Por sustitucion, compruebe que las soluciones dadas corresponden a las ecuacionesdiferenciales:
1. e−y − cx = 1 ⇐⇒ xy′ + 1 = ey.
2. y2
2 + y + ln |y − 1| = − 1x + c ⇐⇒ x2y2y′ + 1 = y
3. y = ccos x ⇐⇒ y′ − y tg x = 0.
4. y = ln(c+ ex) ⇐⇒ y′ = ex−y.
5. y =√x2 − cx ⇐⇒ (x2 + y2)dx− 2xydy = 0.
6. x = yecy+1 ⇐⇒ y′ = yx(ln x−ln y) .
7. y = x√
1− x2 ⇐⇒ yy′ = x− 2x3.
8. y = − 12x
2e−x + c1ex + c2e
−x + c3xe−x ⇐⇒ y′′′ + y′′ − y′ − y = 2e−x.

16 CAPITULO 1. CONCEPTOS BASICOS

Capıtulo 2
ECUACIONES DIFERENCIALESDE PRIMER ORDEN
Una vez dadas algunas de las definiciones basicas correspondientes a las ecuaciones diferencialesordinarias podemos estudiar los metodos de solucion. Para esto, empecemos con las ecuaciones massencillas, pero no menos importantes, ya que existe un sin numero de aplicaciones de estas ecuaciones,tanto en las ciencias exactas como en las ingenierıas.
De la ecuacion (1.1), se deduce que una ecuacion diferencial de primer orden tiene la forma
F(x, y, y′
)= 0 (2.1)
Si, ademas, suponemos que esta ecuacion se puede resolver respecto a su derivada, entonces, tenemosla siguiente ecuacion
y′ = f(x, y) (2.2)
Para esta ecuacion es valido el siguiente teorema acerca de la existencia y unicidad de su solucion.
Teorema 2.0.1. (existencia y unicidad) Sea dada la ecuacion diferencial
y′ = f(x, y), (2.3)
y sea f(x, y) una funcion continua de las variables x, y, definida en un cierto dominio D en el planox0y. Si existe una vecindad Ω de un punto M0(x0, y0) ∈ D, donde f(x, y);
es continua en todos los argumentos,
admite derivada parcial ∂f∂y , entonces, existe un intervalo (x0−h0, y0 +h0) en la x− abcisa en
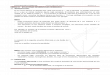
el cual existe una solucion unica y = φ(x) de la ecuacion (2.3), tal que, para una x = x0 hayuna y = y0, figura (2.1)
17

18 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 2.1:
La condicion, de que la funcion debe tomar un valor dado y0 para un x = x0, se conoce comocondicion inicial. Formalmente, esta condicion la escribimos como
y |x=x0= y0 ⇐⇒ y(x0) = y0 (2.4)
El problema de hallar una solucion de la ecuacion diferencial (2.2), sujeta a las condiciones iniciales(2.4), se conoce como problema de Cauchy .
Desde el punto de vista geometrico, el teorema nos dice que por el punto M(x0, y0) pasa una ysolo una curva integral de la ecuacion (2.3).
El teorema anterior expresa las condiciones suficientes para la existencia de una solucion unicadel problema de Cauchy para la ecuacion (2.3), pero estas condiciones no son necesarias, ya quepuede existir una solucion unica de la ecuacion (2.3), que satisface a la condicion inicial (2.4), apesar de que en el punto (x0, y0) no se cumpla una (o las dos) de las condiciones del teorema.
Apliquemos el teorema anterior para analizar los siguientes ejercicios.
a) y′ = x+ y2, b) y′ =x
y. (2.5)
Solucion a):

19
Tenemos que la funcion f(x, y) es
f(x, y) = x+ y2. (2.6)
la derivada de esta funcion respecto a y es
∂f
∂y= 2y. (2.7)
Como podemos ver, las condiciones del teorema se cumplen, es decir, la funcion f(x, y) en (2.6), ysu derivada parcial (2.7), son continuas en todo el dominio de x y y. Entonces, existe una, y solouna solucion y = φ(x) que cumple la condicion y(x = x0) = y0.
Solucion b):
Tenemos que la funcion y su derivada son
f(x, y) =x
y.
∂f
∂y= − x
y2. (2.8)
Como podemos ver, estas presentan discontinuidad en los puntos (x0, 0) del eje x. Por lo tanto, lasdos condiciones del teorema no se cumplen. Sin embargo, por cada punto del eje x pasa una solacurva integral
y =√x2 − x2
0, (2.9)
donde x0 es una constante arbitraria.
Del teorema(existencia y unicidad), se deduce que la ecuacion (2.2), tiene un numero infinito desoluciones diferentes. Por ejemplo, la solucion cuya grafica pasa por el punto (x0, y0) y otra solucioncuya grafica pasa por (x0, y1) y otra que pasa por (x0, y2) y otra mas que pasa por (x0, y3) y ası suce-sivamente, siempre y cuando estos puntos sean puntos del dominio D que es donde esta definida lafuncion.
Se llama solucion general de una ecuacion diferencial de primer orden a la funcion
y = φ(x, c) (2.10)
que depende de una constante arbitraria c, y cumple las siguientes condiciones
Satisface la ecuacion diferencial para cualquier valor de c
Cualquiera que sea la condicion inicial y = y0 para x = x0, se puede encontrar un valor dec = c0, tal que la funcion y = φ(x, c0) cumpla la condicion inicial dada. Es claro que estamossuponiendo que los valores y0 y x0 pertenecen al dominio de variacion de x y y, en el cual severifican las condiciones del teorema sobre la existencia y unicidad de la solucion.
Frecuentemente, sucede que cuando buscamos la solucion de una ecuacion diferencial llegamos ala relacion del tipo
Φ(x, y, c) = 0 (2.11)
no resuelta respecto a y, donde es imposible expresar a y en funcion de funciones elementales, esdecir, explıcitamente. En tal caso la solucion general (2.11), se llama solucion implıcita .

20 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Toda funcion y = φ(x, c0) que sea obtenida a partir de la solucion general y = φ(x, c), ya seaaplicando las condiciones iniciales o dando a la constante c un valor determinado c = c0 se llamasolucion particular y la relacion Φ(x, y, c0) = 0 se llama integral particular de la ecuacion diferencial.
Desde el punto de vista geometrico, la integral general representa una familia de curvas en elplano de coordenadas dependientes de una constante arbitraria c ( a veces, en lugar de constantearbitraria se dice parametro c). A estas curvas se les conoce como curvas integrales de la ecuaciondiferencial dada. Cada integral particular sera representada por una curva de esta familia, la cualpasa por un punto del plano x0y.
Toda ecuacion diferencial, de primer orden (2.2), se puede escribir tambien de la siguiente manera
M(x, y)dx+N(x, y)dy = 0 (2.12)
donde M(x, y) y N(x, y) son funciones continuas dadas en un cierto dominio D del plano x0y,las cuales no contienen puntos singulares. En realidad la expresion (2.12), contiene dos ecuacionesdiferenciales de primer orden; una respecto a la funcion y(x) y la otra respecto a la funcion x(y). Enel primer caso, por solucion de la ecuacion (2.12), se entiende la funcion y = φ(x, c) que esta definidaen cierto intervalo (a, b), tiene derivada continua y satisface la ecuacion (2.12).
Debido a que el diferencial dx de la variable independiente x no es igual a cero, la ecuacion (2.12),se puede dividir entre dx y obtener un valor de y(x) que satisfaga la ecuacion diferencial de primerorden escrita en su forma conocida. Para esto dividimos entre dx la ecuacion (2.12), tenemos
M(x, y) +N(x, y)dy
dx= 0. (2.13)
Ahora escribiendo esta expresion de la siguiente manera
dy
dx= −M(x, y)
N(x, y)= f(x, y), (2.14)
siempre y cuando N(x, y) 6= 0. Como se puede observar, las expresiones (2.2) y (2.12) son simple-mente dos maneras de escribir lo mismo, es decir, dos diferentes representaciones.
Siguiendo el mismo razonamiento, obtenemos que para las soluciones de la forma x = φ(y, c) laecuacion diferencial (2.12) es equivalente a la siguiente
dx
dy= −N(x, y)
M(x, y)= g(x, y), (2.15)
siempre y cuando M(x, y) 6= 0. Vamos a estudiar mas detalladamente la ecuacion diferencial (2.14),donde x es la variable independiente y y(x) es la funcion dependiente. No existe un metodo generalpara integrar las ecuaciones diferenciales de primer orden (2.14). Sin embargo, para ciertas formasparticulares de la funcion f(x, y) sı existen metodos generales de integracion. Estos metodos seanalizan detalladamente en las secciones siguientes.

2.1. ECUACIONES DIFERENCIALES CON VARIABLES SEPARABLES 21
2.1. Ecuaciones Diferenciales con Variables Separables
Supongamos que en la ecuacion (2.12) podemos escribir M(x, y) = p1(x)q1(y) y N(x, y) =p2(x)q2(y), entonces, tenemos la siguiente expresion
p1(x)q1(y)dx+ p2(x)q2(y)dy = 0 (2.16)
donde pi(x), i = 1, 2., son funciones continuas dadas en un intervalo (a, b), y qi(y), i = 1, 2., sonfunciones tambien continuas en el intervalo (c, d) y el dominio D = [(x, y) : x ∈ (a, b), y ∈ (c, d)] nocontiene puntos singulares de la ecuacion (2.16). Al tipo de ecuaciones (2.16), se les conoce comoecuaciones diferenciales con variables separables .
Supongamos que en (2.16), ninguna de las funciones p2(x) y q1(x) son identicamente igual a cero,esto nos permite expresar la ecuacion (2.16), en la forma
p1(x)p2(x)
dx+q2(y)q1(y)
dy = 0. (2.17)
De donde la integracion termino a termino nos conduce a la relacion∫p1(x)p2(x)
dx+∫q2(y)q1(y)
dy = c, (2.18)
que, precisamente, determina en forma implıcita la solucion general de la ecuacion (2.16). Observeseque, en la expresion (2.18), c es una constante de integracion, la cual sera determinada de lascondiciones iniciales. Al calcular las dos integrales en (2.18), ya no es necesario introducir ningunaconstante de integracion, ya que, a la suma o resta de dos o mas constantes siempre podemosrepresentarla por medio de una sola constante, en este caso por c.
Ejemplo 1.
Hallar la solucion general de la ecuacion diferencial
e−y(1 +
dy
dx
)= 1. (2.19)
Solucion:
Antes que nada debemos analizar que tipo de ecuacion es. Para esto, reescribamos la ecuaciondada en la siguiente forma
e−y + e−y dy
dx= 1 → e−y dy
dx= 1− e−y → e−y dy
dx= −(e−y − 1). (2.20)
De la ultima ecuacion, en (2.20), vemos que podemos separar las variables, esto es
e−y
e−y − 1dy = −dx. (2.21)
Ahora integrando las dos partes
−∫d(e−y − 1)e−y − 1
= −∫dx →
∫d(e−y − 1)e−y − 1
=∫dx, (2.22)

22 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
donde hemos tomado en cuenta la relacion d(e−y − 1) = −e−ydy. Integrando esta expresion obte-nemos la solucion general
ln |e−y − 1| = x+ ln c, (2.23)
donde por comodidad hemos tomado a la constante de integracion como ln c, desde luego pudimoshaber tomado a la constante c, esto no altera el resultado.
Ahora solo nos queda representar la solucion general en una forma mas elegante(compacta). Estose puede hacer haciendo uso de las propiedades de los logaritmos
ln y + lnx = ln |yx|, ln y − lnx = ln∣∣∣yx
∣∣∣, ln y = x → y = ex.
Aplicando estas propiedades a la ecuacion (2.23), la solucion general tiene la forma
e−y = 1 + cex. (2.24)
Como podemos observar, la solucion general esta dada en forma implıcita.
Ejemplo 2:
Resolver la ecuaciondy
dx= (x2 + 1)y ln y. (2.25)
Solucion:
Esta ecuacion es de variables separables,
dy
y ln y= (x2 + 1)dx →
∫dy
y ln y=
∫(x2 + 1)dx. (2.26)
Tomando en cuenta que d(ln y) = 1ydy, tenemos∫
d ln yln y
=∫
(x2 + 1)dx. (2.27)
Integrando, obtenemos la solucion general
ln | ln y| = x3
3+ x+ c. (2.28)
Ejemplo 3:
Resolver el problema de Cauchy
x2ydx = (x3 + 1)(y2 + 1)dy, y(2) = 3. (2.29)
Solucion:
Como podemos ver, esta ecuacion es de variables separables. Separando las variables, tenemos
x2
x3 + 1dx =
y2 + 1y
dy. (2.30)
Integrando13
∫d(x3 + 1)x3 + 1
=∫ (
y +1y
)dy, (2.31)

2.1. ECUACIONES DIFERENCIALES CON VARIABLES SEPARABLES 23
resulta13
ln |x3 + 1| = y2
2+ ln y +
c
3→ ln |x3 + 1| = 3
2y2 + 3 ln y + c, (2.32)
donde hemos tomado por constante de integracion a c/3 esto es por comodidad. Usando las propiedadesde los logaritmos y acomodando terminos, tenemos el resultado final
ln∣∣∣x3 + 1
y3
∣∣∣ =32y2 + c. (2.33)
Esta es la solucion general de la ecuacion (2.29). Para hallar la solucion con las condiciones y(2) = 3,es necesario sustituir estos valores en (2.33). Tenemos
ln∣∣∣ (2)3 + 1
(3)3
∣∣∣ =32(3)2 + c → c = ln
∣∣∣ 927
∣∣∣− 272. (2.34)
Sustituyendo el valor de c en (2.33), tenemos la solucion del problema de Cauchy
ln∣∣∣x3 + 1
y3
∣∣∣ =32y2 + ln
∣∣∣13
∣∣∣− 272. (2.35)
Esta es la solucion particular de (2.29).
Ejemplo 4:
Resolver la ecuacion diferencial
dy
dx= ay + by2, a y b son constantes. (2.36)
Solucion:
Esta ecuacion es de variables separables
dy
by2 + ay= dx →
∫dy
y(by + a)=
∫dx. (2.37)
Para resolver la primer integral de la izquierda, en (2.37), usaremos fracciones parciales, esto es
1y(by + a)
=A
y+
B
by + a→ A =
1a, B = − b
a→ 1
y(by + a)=
1ay− b
a(by + a). (2.38)
Entonces, la primer integral∫dy
y(by + a)=
1a
∫dy
y− 1a
∫dy
y + ab
=1a
ln y − 1a
ln∣∣∣y +
a
b
∣∣∣. (2.39)
Luego poniendo este resultado en (2.37) e integrando la parte derecha, tenemos
1a
ln y − 1a
ln∣∣∣y +
a
b
∣∣∣ = x+ c1, (2.40)
donde c1 es la constante de integracion. Usando las propiedades de los logaritmos y haciendo unpoco de algebra elemental, podemos escribir la solucion (2.40) de la siguiente manera
y(x) =aeac1eax
b(1− eac1eax)→ y(x) =
a
Ce−ax − b, (2.41)
donde hemos multiplicado la primer expresion de (2.41), por e−ac1e−ax y definido la constante deintegracion como C = be−ac1 .

24 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.2. Ecuaciones Diferenciales Reducibles a Separables
Supongamos ahora que la funcion f(x, y) en (2.2) tiene la forma f(ax + by + c), entonces, laecuacion diferencial se escribe de la siguiente manera
dydx = f(ax+ by + c) (2.42)
donde a, b y c son ciertas constantes dadas. La ecuacion (2.42) puede reducirse a una ecuacion convariables separables si hacemos la siguiente sustitucion
z = ax+ by + c (2.43)
En (2.43), z es una funcion continua de x, es decir, z = z(x). Para sustituir en la ecuacion (2.42),debemos tomar la derivada de z respecto a x, tenemos
dz
dx= a+ b
dy
dx. (2.44)
De dondedy
dx=
1b
dz
dx− a
b. (2.45)
Entonces, la ecuacion (2.42), se reduce a
dz
dx= bf(z) + a. (2.46)
Esta ultima ecuacion es una ecuacion con variables separables. Su solucion implıcita es∫dz
bf(z) + a=
∫dx →
∫dz
f(z) + ab
= b
∫dx+ c1, (2.47)
donde c1 es la constante de integracion. La solucion implıcita, (2.47), es la solucion de la ecuaciondiferencial (2.46). Entonces, para obtener la solucion de la ecuacion (2.42), debemos recordar quehicimos la sustitucion (2.43). O bien, en terminos de las variables x y y, tenemos∫
d(ax+ by + c)f(ax+ by + c) + a
b
= b
∫dx+ c1. (2.48)
Al integrar la expresion (2.48) obtendremos la solucion general de la ecuacion diferencial (2.42).
Ejemplo 1:
Hallar la solucion general de la ecuacion diferencial
dy
dx=
√4x+ 2y − 1. (2.49)
Solucion:
Segun el metodo antes visto, para resolver este tipo de ecuacion debemos hacer el cambio
z = 4x+ 2y − 1. (2.50)

2.2. ECUACIONES DIFERENCIALES REDUCIBLES A SEPARABLES 25
Ahora, para sustituir (2.50) en la ecuacion (2.49), debemos encontrar la derivada dydx en terminos de
la nueva funcion z(x). Para esto, calculamos la derivada, en (2.50), respecto a x
dz
dx= 4 + 2
dy
dx, (2.51)
de donde obtenemosdy
dx=
12dz
dx− 2. (2.52)
Sustituyendo en la ecuacion original (2.49), tenemos
12dz
dx− 2 =
√z → dz
dx= 2
√z + 4. (2.53)
De esta forma obtenemos una ecuacion con variables separables, la cual podemos resolver sin ningunproblema. Integrando ∫
dz√z + 2
= 2∫dx. (2.54)
Calculemos la integral de lado izquierdo. Para esto hacemos el cambio de variable
u =√z, du =
12z−1/2dz, 2udu = dz. (2.55)
Sustituyendo en (2.54), obtenemos
2∫
u
u+ 2du = 2
∫u+ 2− 2u+ 2
du = 2∫ (
1− 2u+ 2
)du
= 2(u− 2 ln |u+ 2|
)= 2u− 4 ln |u+ 2|. (2.56)
Recordando que u =√z, tenemos que la integral es∫
dz√z + 2
= 2√z − 4 ln |
√z + 2| (2.57)
Regresando a las variables x, y, e integrando la parte derecha de la ecuacion (2.54), resulta que lasolucion general de la ecuacion (2.49), esta dada por la expresion√
4x+ 2y − 1− 2 ln |√
4x+ 2y − 1 + 2| = x+ c. (2.58)
Esta solucion esta en forma implıcita. La constante c puede tomar diferentes valores dependiendode las condiciones iniciales del problema.
Ejemplo 2:
Resolver la ecuacion diferencialdy
dx= (x+ y)2. (2.59)
Solucion:
Hagamos la sustitucion
z = x+ y → dz
dx= 1 +
dy
dx→ dy
dx= −1 +
dz
dx. (2.60)
Sustituyendo este resultado en (2.59), tenemos
−1 +dz
dx= z2 → dz
dx= z2 + 1. (2.61)

26 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Separando las variables e integrando∫dz
z2 + 1=
∫dx → arc tg z = x+ c. (2.62)
Recordando que z = x+ y, tenemos como resultado
arc tg(x+ y) = x+ c → x+ y = tg(x+ c). (2.63)
Ejemplo 3:
Hallar la solucion general de la ecuacion
dy
dx=y
x
(ln y − lnx
). (2.64)
Solucion:
La ecuacion (2.64) la podemos escribir de la siguiente manera
dy
dx=y
xln
(yx
). (2.65)
Hagamos la sustitucion
z =y
x→ y = zx → dy
dx= z + x
dz
dx. (2.66)
Sustituyendo en (2.65), tenemos
xdz
dx= z(ln z − 1). (2.67)
Integrando ∫dz
z(ln z − 1)=
∫dx
x. (2.68)
Obtenemos
ln | ln z − 1| = lnx+ ln c → ln∣∣∣ ln z − 1
cx
∣∣∣ = 0 → ln z = cx+ 1. (2.69)
Recordando la sustitucion z = yx , obtenemos finalmente la solucion de la ecuacion (2.64),
ln(yx
)= cx+ 1. (2.70)
2.3. Ecuaciones Diferenciales Homogeneas
Una funcion F (x, y) es homogenea de orden n, si para todo λ > 0 se cumple la relacion
F (λx, λy) = λnF (x, y) (2.71)
Ejemplo 1:
Analizar si la funcion dada es homogenea y de que orden
F (x, y) = x2 + y2. (2.72)

2.3. ECUACIONES DIFERENCIALES HOMOGENEAS 27
Solucion:
De la definicion, tenemos
F (λx, λy) = (λx)2 + (λy)2 = λ2(x2 + y2) = λ2F (x, y). (2.73)
Es decir, la funcion (2.72), es una funcion homogenea de orden 2.
Ejemplo 2:
Sea la funcion
F (x, y) =x2 + y
x, (2.74)
analizar si esta es o no homogenea.
Solucion:
Aplicando la definicion, tenemos
F (λx, λy) =(λx)2 + λy
λx=λ2x2 + λy
λx=λ(λx+ y)
λx=λx+ y
x, (2.75)
la cual, no cumple con la condicion (2.71), y por consiguiente no es homogenea.
Ejemplo 3:
Demostrar que la funcion
F (x, y) =x4 + y4
y4, (2.76)
es homogenea de orden cero.
Solucion:
De la definicion, tenemos
F (λx, λy) =(λx)4 + (λy)4
(λy)4=λ4x4 + λ4y4
λ4y4=λ4(x4 + y4)
λ4y4= F (x, y). (2.77)
Esto muestra que n = 0 y por lo tanto, la funcion (2.76), es homogenea de orden cero.
Toda ecuacion diferencial de la forma (2.2),
dydx = f(x, y) (2.78)
se llama ecuacion diferencial homogenea , si la funcion f(x, y) es homogenea de orden cero. De unaforma equivalente, toda ecuacion diferencial de la forma
M(x, y)dx+N(x, y)dy = 0 (2.79)
sera homogenea, si y solo si, las funciones M(x, y) y N(x, y) son funciones homogeneas del mismoorden.
Toda ecuacion diferencial homogenea se reduce a una ecuacion diferencial con variables separablesmediante la sustitucion y = z(x)x.

28 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Para demostrar lo anterior, supongamos que las funciones M(x, y) y N(x, y) en (2.79), sonfunciones homogeneas del mismo orden y, por consiguiente, tiene lugar la sustitucion y = z(x)x.Entonces, tenemos que el diferencial dy se expresa como
dy = zdx+ xdz, (2.80)
sustituyendo en la ecuacion (2.79), obtenemos
M(x, zx)dx+N(x, zx)[zdx+ xdz] = 0, (2.81)
acomodando terminos, resulta
[xM(1, z) + zxN(1, z)]dx+ x2N(1, z)dz = 0. (2.82)
Luego, dividiendo entre x llegamos a la relacion
[M(1, z) + zN(1, z)]dx+ xN(1, z)dz = 0. (2.83)
Por ultimo, separando variables e integrando ambas partes de (2.83), obtenemos implıcitamente lasolucion general de la ecuacion (2.83).∫
dx
x+
∫N(1, z)
M(1, z) + zN(1, z)dz = c, (2.84)
donde c es la constante de integracion. Al integrar (2.84), tendremos la solucion representada comoz(x) = χ(x, c) de donde debemos recordar el cambio z = y/x, para tener la solucion y(x) = φ(x, c)que sera la solucion general de la ecuacion (2.79).
Ejemplo 4:
Hallar la solucion general de la ecuacion diferencial
(y2 + xy − x2)dx− x2dy = 0. (2.85)
Solucion:
Esta ecuacion tiene la forma de (2.79). Veamos si es homogenea, para esto identificamos lasfunciones M(x, y) y N(x, y)
M(x, y) = y2 + xy − x2, N(x, y) = −x2. (2.86)
Es facil mostrar que estas funciones son homogeneas del mismo orden 2. Entonces, hagamos lasustitucion
y = zx → dy = zdx+ xdz. (2.87)
Sustituyendo en la ecuacion (2.85), obtenemos
(z2x2 + zx2 − x2)dx− x2(zdx+ xdz) = 0. (2.88)
Factorizando, resultax2[(z2 + z − 1− z)dx− xdz] = 0. (2.89)
Suponiendo que x2 6= 0, entonces debe cumplirse la relacion
(z2 + z − 1− z)dx+ xdz = 0 →∫dx
x−
∫dz
z2 − 1=
12
ln c. (2.90)

2.3. ECUACIONES DIFERENCIALES HOMOGENEAS 29
donde, por comodidad, hemos escogido a la constante de integracion como 12 ln c. La segunda integral
de la izquierda la desarrollaremos en fracciones parciales, es decir
1z2 − 1
=1
(z + 1)(z − 1)=
A
z + 1+
B
z − 1→ A = −1
2, B =
12. (2.91)
Entonces, regresando a la segunda expresion de (2.90), tenemos∫dx
x+
12
∫dz
z + 1− 1
2
∫dz
z − 1=
12
ln c. (2.92)
Integrando esta expresion, tenemos
lnx+12
ln |z + 1| − 12
ln |z − 1| = 12
ln c. (2.93)
Utilizando las propiedades de los logaritmos, obtenemos
ln∣∣∣x2(z + 1)c(z − 1)
∣∣∣ = 0 → x2(z + 1) = c(z − 1). (2.94)
Recordando la sustitucion y = zx, de donde z = yx , y sustituyendo en (2.94), resulta
x2(yx
+ 1)
= c(yx− 1
). (2.95)
Esta expresion la podemos escribir en su forma final
x2(y + x) = c(y − x). (2.96)
Otro tipo de ecuacion diferencial homogenea es la ecuacion
dydx = f
(yx
)(2.97)
Entonces, haciendo la sustitucion
z = yx → y = xz (2.98)
Derivando respecto a x, de (2.98), resulta
dy
dx= z + x
dz
dx. (2.99)
Sustituyendo en (2.97),
z + xdz
dx= f(z). (2.100)
Esta ecuacion es de variables separables. Integrando obtenemos∫dz
f(z)− z=
∫dx
x→ ln
∣∣∣xc
∣∣∣ =∫
dz
f(z)− z(2.101)
Este mismo resultado lo podemos escribir de la siguiente forma
x = ce∫
dzf(z)−z , (2.102)

30 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
donde c 6= 0 es la constante de integracion.
Una ecuacion homogenea mas general que la ecuacion (2.97), tiene la forma
dydx = xα−1f
(y
xα
)(2.103)
Esta ecuacion se puede reducir a una ecuacion con variables separables haciendo la sustitucion
y = xαz(x) (2.104)
Derivando esta expresion respecto a x, obtenemos
dy
dx= αxα−1z + xα dz
dx. (2.105)
Sustituyendo este resultado en (2.103), tenemos la siguiente ecuacion
αxα−1z + xα dz
dx= xα−1f(z) → dz
dx=
1x
[f(z)− αz]. (2.106)
Separando las variables e integrando ∫dz
f(z)− αz=
∫dx
x. (2.107)
Finalmente, este resultado lo podemos escribir como
ln∣∣∣xc
∣∣∣ =∫
dz
f(z)− αz→ x = ce
∫dz
f(z)−αz , (2.108)
donde c 6= 0 es la constante de integracion. Observe que las soluciones (2.102), y (2.108), son muysemejantes excepto por el numero arbitrario α, que puede tomar cualquier valor y para el caso enque α = 1, la ecuacion (2.103), se reduce a la ecuacion (2.97).
Toda ecuacion del tipo
yf(xy)dx+ xg(xy)dy = 0 (2.109)
se reduce a una ecuacion con variables separables mediante la sustitucion
z = xy → y = zx (2.110)
Para probar esto, diferenciemos (2.110), respecto a x, tenemos
dy =xdz − zdx
x2. (2.111)
Sustituyendo en (2.109), resulta
z
xf(z)dx+ xg(z)
[xdz − zdx
x2
]= 0. (2.112)

2.3. ECUACIONES DIFERENCIALES HOMOGENEAS 31
Esta expresion se reduce a la ecuacion
z[f(z)− g(z)]dx+ xg(z)dz = 0, (2.113)
la cual es de variables separables. Entonces, tenemos el resultado final∫dx
x+
∫g(z)dz
z[f(z)− g(z)]= c. (2.114)
La sustitucion z = xmyn transforma una ecuacion de la forma
dydx = y
xf(xmyn) (2.115)
en una ecuacion con variables separables. Para demostrar esta afirmacion, tomemos la derivada dez = xmyn,
dz
dx= mxm−1yn + nxmyn−1 dy
dx→ 1
n
dz
dx− m
nx=
1xf(z). (2.116)
Esta ecuacion la podemos escribir como
1n
dz
dx=
1x
[f(z) +
m
n
], (2.117)
la cual es de variables separables. Separando las variables e integrando, obtenemos∫dz
[nf(z) +m]=
∫dx
x. (2.118)
Ejemplo 5:
Resolver la ecuacion diferencial
xdy
dx− y = (x+ y) ln
(x+ y
x
). (2.119)
Solucion:
Escribamos esta ecuacion de la siguiente manera
dy
dx=y
x+
(x+ y
x
)ln
(x+ y
x
). (2.120)
Esta ecuacion es homogenea, ası que podemos transformarla en una ecuacion con variables separablescon la siguiente sustitucion
z(x) = yx (2.121)
Diferenciando respecto a x, tenemos
dz
dx=x dy
dx − y
x2→ dy
dx= x
dz
dx+ z. (2.122)
Sustituyendo en la ecuacion (2.120), obtenemos
xdz
dx= (1 + z) ln(1 + z). (2.123)

32 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Como podemos ver, esta ecuacion es de variables separables∫dz
(1 + z) ln(1 + z)=
∫dx
x. (2.124)
Estas integrales son bastante sencillas de resolver si notamos que el termino (1 + z) que esta en eldenominador, es el diferencial de ln(1 + z), ası∫
d ln(1 + z)ln(1 + z)
=∫dx
x. (2.125)
El resultado de integrar esln ln(1 + z) = ln cx, (2.126)
Usando las propiedades de los logaritmos, tenemos que
ln(1 + z) = cx. (2.127)
Ahora, regresando a las variables y, x, tenemos la solucion general
ln(x+ y
x
)= cx. (2.128)
Ejemplo 6:
Resolver la ecuacion diferencialxy′ = y − xey/x. (2.129)
Solucion:
Como podemos ver, esta es una ecuacion homogenea, por lo tanto podemos reducirla a unaecuacion con variables separables mediante la sustitucion
z =y
x→ y = xz. (2.130)
Diferenciando respecto a x el ultimo termino de la expresion (2.130), obtenemos
dy
dx= z + x
dz
dx. (2.131)
Sustituyendo en la ecuacion original (2.129), tenemos la siguiente ecuacion
z + xdz
dx= z − ez → x
dz
dx= −ez. (2.132)
Separando variables ∫e−zdz = −
∫dx
x. (2.133)
Integrando, tenemos
−e−z = − lnx− ln c → e−z = lnx+ ln c → e−z = ln |cx|. (2.134)
Ahora recordamos que hicimos el cambio z = y/x, lo sustituimos en la ultima ecuacion de (2.134),y obtenemos
ln |cx| = e−y/x. (2.135)
Esta expresion la podemos escribir como
y = −x ln | ln cx|. (2.136)
En la siguiente seccion veremos otro tipo mas general de ecuaciones diferenciales que se reducen aecuaciones homogeneas las cuales, a su vez, se reducen a ecuaciones con variables separables.

2.4. ECUACIONES DIFERENCIALES REDUCIBLES A HOMOGENEAS 33
2.4. Ecuaciones Diferenciales Reducibles a Homogeneas
Mediante una transformacion lineal apropiada, toda ecuacion del tipo
dydx = f
(ax+by+c
a1x+b1y+c1
)(2.137)
se reduce a una ecuacion homogenea la cual, a su vez, con la sustitucion que vimos anteriormentey = z(x)x, se reduce a una ecuacion con variables separables.
En la ecuacion (2.137), las funciones g(x, y) = ax + by + c = 0 y g1(x, y) = a1x + b1y + c1 = 0definen dos rectas que cuando c = c1 = 0 pasan por el orıgen de coordenadas y en tal caso (2.137),es una ecuacion homogenea que se reduce a una ecuacion con variables separables.
Supongamos que al menos uno de los parametros c o c1, o ambos son diferentes de cero, entonces,la ecuacion (2.137), no es una ecuacion diferencial homogenea. En tal caso, de las ecuaciones g(x, y) =ax+ by+ c = 0 y g1(x, y) = a1x+ b1y+ c1 = 0 podemos hallar el punto de interseccion de las rectas(x0, y0) a donde debemos trasladar el orıgen del nuevo sistema de coordenadas X,Y , obteniendo deesta manera la transformacion lineal
x = X + x0 y = Y + y0 (2.138)
donde x0, y0 son ciertas constantes arbitrarias y diferentes de cero. Entonces, tenemos
dy
dx=dY
dX. (2.139)
Ahora sustituyendo en la ecuacion (2.137), las expresiones (2.138), y (2.139), obtenemos
dY
dX= f
( aX + bY + ax0 + by0 + c
a1X + b1Y + a1x0 + b1y0 + c1
). (2.140)
Elijamos x0 y y0 de tal manera que se cumplan las ecuaciones;
ax0 + by0 + c = 0,a1x0 + b1y0 + c1 = 0. (2.141)
Es decir, determinemos las constantes x0 y y0 como soluciones del sistema de ecuaciones algebraicas(2.141). Bajo esta condicion la ecuacion (2.137), tomara la forma
dY
dX= f
( aX + bY
a1X + b1Y
). (2.142)
Esta claro que esta ecuacion es homogenea segun la definicion dada anteriormente (2.71). Mediantela sustitucion Y = z(X)X la ecuacion (2.142), se reduce a una ecuacion con variables separables.Al resolver la ecuacion (2.142), y regresando a las variables x y y [para esto de (2.138), debemoscambiar a las X,Y por X = x−x0, Y = y−y0], obtenemos la solucion general de la ecuacion (2.137).
El sistema de ecuaciones (2.141) no tendra solucion si su determinante es cero, en tal caso,ab1 = a1b. No obstante, se puede notar que en tal caso a1
a = b1b = λ, es decir, a1 = λa, b1 = λb y,
como consecuencia, la ecuacion (2.137), se transformar en
dy
dx= f
( (ax+ by) + c
λ(ax+ by) + c1
). (2.143)

34 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Luego, haciendo la sustitucionz = ax+ by, (2.144)
en (2.143), esta se reduce a una ecuacion con variables separables. Veamos que la hipotesis es cierta.Derivando (2.144) respecto a x, obtenemos
dz
dx= a+ b
dy
dx. (2.145)
De donde,dy
dx=
1b
dz
dx− a
b. (2.146)
Sustituyendo las expresiones (2.144), y (2.145), en (2.143), obtenemos, finalmente
1b
dz
dx− a
b= f
( z + c
λz + c1
). (2.147)
La ecuacion (2.147), es una ecuacion con variables separables∫dz
f(
z+cλz+c1
)+ a
b
= b
∫dx+ C, (2.148)
donde c y c1 son constantes dadas y C es la constante de integracion.
Ejemplo 1:
Resolver la ecuacion diferencial
(x− y + 3)dx+ (3x+ y + 1)dy = 0. (2.149)
Solucion:
Para resolver este tipo de ecuaciones primero debemos encontrar el punto de interseccion de lasrectas x−y+3 = 0 y 3x+y+1 = 0. Esto es, resolver el sistema de dos ecuaciones con dos incognitas
x− y + 3 = 0,3x+ y + 1 = 0. (2.150)
Al resolver este sistema obtenemos los puntos de interseccion, x0 = −1 y y0 = 2. Al punto (−1, 2)es a donde debemos trasladar el origen de coordenadas para que la ecuacion (2.149), se transformeen homogenea. Para esto hacemos x = X − 1 y y = Y + 2, y vemos que, dx = dX, dy = dY , losdiferenciales de x y y no cambian, pues estamos desplazando en unas constantes. De este modo, laecuacion original (2.149), toma la siguiente forma
(X−1−Y −2+3)dX+(3X−3+Y +2+1)dY = 0 → (X−Y )dX+(3X+Y )dY = 0. (2.151)
Esta ecuacion es una ecuacion homogenea y la podemos transformar en una con variables separableshaciendo la sustitucion
Y = zX, dY = zdX +Xdz. (2.152)
Sustituyendo en (2.151), tenemos
(X − zX)dX + (3X + zX)(zdX +Xdz) = 0. (2.153)
Agrupando terminos(1 + z)2dX +X(3 + z)dz = 0. (2.154)

2.4. ECUACIONES DIFERENCIALES REDUCIBLES A HOMOGENEAS 35
Separando e integrando ∫dX
X+
∫z + 3
(z + 1)2dz = c. (2.155)
La primer integral es facil. Hagamos por separado la segunda integral, esto es∫z + 3
(z + 1)2dz =
∫z + 1 + 2(z + 1)2
dz =∫
dz
z + 1+
∫2
(z + 1)2dz =
= ln |z + 1| − 2z + 1
. (2.156)
Luego, tenemos que la solucion de la expresion (2.155), es
ln |X|+ ln |z + 1| − 2z + 1
= c. (2.157)
Regresando a las variables X,Y mediante la relacion z = Y/X, entonces, de (2.157), resulta
ln |X|+ ln∣∣∣1 +
Y
X
∣∣∣− 2YX + 1
= c. (2.158)
Haciendo un poco de operaciones algebraicas la expresion (2.158), la podemos escribir como
ln |X|+ ln∣∣∣X + Y
X
∣∣∣− 2XY +X
= c, (2.159)
la cual, finalmente, tiene la forma
ln |X + Y | − 2XY +X
= c. (2.160)
Aun nos falta regresar a las variables originales x, y. Tenemos que X = x+ 1 y Y = y − 2, de modoque la solucion general de la ecuacion (2.149) es
ln |x+ y − 1| = c+2(x+ 1)x+ y − 1
. (2.161)
Ejemplo 2:
Resolver la ecuaciondy
dx=y − x+ 1y − x
. (2.162)
Solucion:
Esta ecuacion tiene la forma de (2.143). Hagamos la sustitucion, segun (2.144), tenemos
z = y − x → dz
dx=dy
dx− 1 → dy
dx= 1 +
dz
dx. (2.163)
Sustituyendo en (2.162), resulta
1 +dz
dx=z + 1z
→ dz
dx=z + 1z
− 1 =z + 1− z
z=
1z. (2.164)
Separando las variables e integrando, obtenemos∫zdz = dx → z2
2= x+
c
2→ z2 = 2x+ c, (2.165)

36 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
donde hemos escogido a c/2 como la constante de integracion. Ahora, recordemos la sustitucionz = y − x en (2.163), y poniendola en la ultima expresion, (2.165), obtenemos el resultado final
(y − x)2 = 2x+ c. (2.166)
Ejemplo 3:
Hallar la solucion general de la ecuacion
(x− y + 6)dx− (x+ y + 8)dy = 0. (2.167)
Solucion:
De la ecuacion identificamos las funciones
M(x, y) = x− y + 6, N(x, y) = −x− y − 8. (2.168)
Para encontrar el punto de interseccion de las rectas debemos resolver el sistema de ecuaciones
x− y + 6 = 0,−x− y − 8 = 0. (2.169)
El punto de interseccion es x0 = −7 y y0 = −1. Entonces, haciendo el desplazamiento
x = X − 7, y = Y − 1. (2.170)
Luego, sustituyendo en (2.167), tenemos
(X − Y )dX − (X + Y )dY = 0. (2.171)
Esta ecuacion es homogenea y la podemos resolver haciendo la sustitucion Y = zX. Sin embargo,es mas facil escribirla de la siguiente manera
XdX − Y dX −XdY − Y dY = 0 → XdX − Y dY − d(XY ) = 0, (2.172)
donde, d(XY ) = Y dX +XdY . Ahora es facil integrar∫XdX −
∫Y dY −
∫d(XY ) =
12c. → 1
2X2 − 1
2Y 2 − Y X =
12c. (2.173)
De la ecuacion (2.170), podemos regresar a las variables x y y, sustituyendo
X = x+ 7, Y = y + 1, (2.174)
en la solucion (2.173), obtenemos la solucion general de (2.167)
(x+ 7)2 − (y + 1)2 − 2(y + 1)(x+ 7) = c. (2.175)
2.5. Ecuaciones Diferenciales Cuasi-homogeneas
Decimos que una funcion F (x, y) es cuasi-homogena de grado k, si para ciertos valores de α y βtiene lugar la igualdad
F (λαx, λβy) = λkF (x, y) (2.176)

2.5. ECUACIONES DIFERENCIALES CUASI-HOMOGENEAS 37
para todo λ > 0. El orden cuasi-homogeneo se forma al multiplicar las funciones, a estos ordenes seles conoce por pesos. De tal forma que x y y, en (2.176), tienen pesos α y β, respectivamente.
Ejemplo 1:
Demostrar que la funcionF (x, y) = 3x2y3, (2.177)
es cuasi-homogenea.
Solucion:
De la definicion, tenemos
F (λαx, λβ) = 3(λαx)2(λβy)3 = 3λ2αx2λ3βy3 = 3λ2α+3βx2y3 = λ2α+3βF (x, y). (2.178)
Entonces, como resultado, tenemos que el grado de la funcion (2.177) es 2α + 3β y sus pesos, parax es 2α y para y, es 3β.
La ecuacion Diferencial
dydx = f(x, y) (2.179)
es cuasi-homogenea (con pesos α y β), si la funcion f(x, y) es cuasi-homogenea (con pesos α y β)de orden k = β − α. Es decir, si la funcion f(x, y) cumple la relacion
f(λαx, λβy) = λβ−αf(x, y) (2.180)
Si tenemos una ecuacion diferencial cuasi-homogenea, es decir, si la funcion f(x, y), en (2.179),cumple la relacion (2.180), entonces, la sustitucion y = uβ/α, donde u = u(x), transforma la ecuacioncuasi-homogenea en una ecuacion homogenea. Sin embargo, desde el punto de vista mas practico,es mejor hacer la sustitucion y = uxβ/α, la cual transforma la ecuacion cuasi-homogenea en unaecuacion con variables separables.
Ejemplo 2:
Comprobar que la ecuacion diferencial
dy
dx=
4x6 − y4
2x4y, (2.181)
es cuasi-homogenea y hallar la solucion general.
Solucion:
Supongamos que x tiene peso α, y β es el peso de y. Entonces, para que la ecuacion sea cuasi-homogenea, la funcion f(x, y) debera cumplir la relacion
f(λαx, λβy) =4(λαx)6 − (λβy)4
2(λαx)4(λβ)y=
4λ6αx6 − λ4βy4
2λ4α+βx4y= λβ−α 4x6 − y4
2x4y. (2.182)
De esta expresion vemos que para que esta funcion sea cuasi-homogenea se debe cumplir la relacion
3α− 2β = 0 → 2β = 3α → si α = 1, entonces, β =32. (2.183)

38 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
La ecuacion (2.181), debera reducirse a una ecuacion con variables separables si hacemos el cambiode variables
y = u(x)x3/2 → dy
dx=
32x1/2u(x) + x3/2 du
dx. (2.184)
Sustituyendo (2.184), en la ecuacion (2.181), obtenemos
x3/2 du
dx+
32x1/2u =
4x6 − u4x6
2x4ux3/2. (2.185)
Dividiendo esta ultima ecuacion entre x1/2 y factorizando, tenemos
xdu
dx+
32u =
x6
x1/2x11/2
4− u4
2u. (2.186)
Finalmente, esta ecuacion se escribe como
xdu
dx+
32u =
4− u4
2u. (2.187)
Esta es una ecuacion con variables separables
xdu
dx=
4− u4
2u− 3u
2= − (u2 + 4)(u2 − 1)
2u. (2.188)
Separando las variables, tenemos ∫2udu
(u2 + 4)(u2 − 1)= −
∫dx
x. (2.189)
Ahora desarrollamos en fracciones parciales la expresion
2u(u2 + 4)(u2 − 1)
=Au+B
u2 + 4+Cu+D
u2 − 1. (2.190)
De aquı obtenemos el siguiente desarrollo
2u(u2 + 4)(u2 − 1)
=Au+B
u2 + 4+Cu+D
u2 − 1= − 2u
5(u2 + 4)+
2u5(u2 − 1)
. (2.191)
Sustituyendo en (2.189), tenemos
−∫
2u5(u2 + 4)
du+∫
2u5(u2 − 1)
du = −∫dx
x. (2.192)
Integrando obtenemos
−15
ln∣∣∣u2 + 4
∣∣∣ +15
ln∣∣∣u2 − 1
∣∣∣ = − ln |x|+ ln c. (2.193)
Hemos escrito ln c, en lugar de 5 ln c, esto no afecta a la solucion. Podemos escribir la ecuacion(2.193), de la siguiente manera
ln∣∣∣x5(u2 − 1)
u2 + 4
∣∣∣ = ln c → x5(u2 − 1) = c(u2 + 4). (2.194)
Ahora recordemos la expresion (2.184), de la cual obtenemos la funcion u2 = y2/x3, y sustituyendoen la ecuacion (2.194), finalmente, tenemos
x5(y2 − x3) = c(y2 + 4x3). (2.195)

2.5. ECUACIONES DIFERENCIALES CUASI-HOMOGENEAS 39
Algunas veces es posible ”provocar” la homogeneidad de una ecuacion diferencial por medio de laintroduccion de nuevas variables s, t, tales que y = sp y x = tq, donde p y q son exponentes pordeterminar(precisamente, de una eleccion adecuada de ellos es que podrıamos obtener una ecuaciondiferencial homogenea para las variables s y t). En esencia este metodo y el anterior son similares,sin embargo, creemos vale la pena mostrarlo.
Ejemplo 3:
Resolver la siguiente ecuacion diferencial
dy
dx=x2y2 − 2
x2. (2.196)
Solucion:
Obviamente, la ecuacion (2.196), no es homogenea. Ası que ”provoquemos” la homogeneidadhaciendo el cambio de variables
y = sp, x = tq, donde p, q ∈ N. (2.197)
En la ecuacion (2.197), t tomara el papel de variable independiente y s tendra el papel de funciondependiente. Entonces,
dy = psp−1ds, dx = qtq−1dt. (2.198)
Luego,dy
dx=psp−1
qtq−1
ds
dt. (2.199)
Sustituyendo en la ecuacion (2.196), tenemos
psp−1
qtq−1
ds
dt=t2qs2p − 2
t2q. (2.200)
O bienp
q
ds
dt=tq−1t2qs2p − 2tq−1
sp−1t2q=t3q−1s2p − 2tq−1
sp−1t2q. (2.201)
Supongamos que m y n son el resultado de las sumas de los exponentes en el numerador y eldenominador de (2.201), respectivamente. Entonces, para que la ecuacion, (2.201), sea homogeneadel mismo orden debe cumplirse la igualdad m = n, donde
m = 3q − 1 + 2p, n = p− 1 + 2q, m = n, 3q − 1 + 2p = p− 1 + 2q → p = −q. (2.202)
De donde podemos escoger q = 1 y entonces, p = −1. En tal caso, la ecuacion (2.201) se transformaen la ecuacion
ds
dt= − t
2s−2 − 2t2s−2
, (2.203)
la cual es homogenea. Hagamos la sustitucion
z =t
s→ ds =
zdt− tdz
z2→ ds
dt=
1z− t
z2
dz
dt, (2.204)
donde z es una nueva funcion dependiente de t. Sustituyendo en (2.203), tenemos
1z− t
z2
dz
dt= −z
2 − 2z2
→ tdz
dt= z2 + z − 2. (2.205)

40 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Esta ultima ecuacion es de variables separables, integremos∫dz
z2 + z − 2=
∫dt
t. (2.206)
La primer integral se hace por fracciones parciales
1(z + 2)(z − 1)
=A
z + 2+
B
z − 1. (2.207)
Obtenemos
Az −A+Bz + 2B = 1 → A = −B, 3B = 1, A = −13, B =
13. (2.208)
Sustituyendo el resultado en la primer integral de (2.206), obtenemos
−13
∫dz
z + 2+
13
∫dz
z − 1=
∫dt
t+
13
ln c → − ln |z + 2|+ ln |z − 1| = ln |ct3|. (2.209)
Usando las propiedades de los logaritmos obtenemos el resultado en funcion de las t, z, esto es
ln∣∣∣ z − 1ct3(z + 2)
∣∣∣ = 0 → z − 1 = ct3(z + 2). (2.210)
Recordemos que z = ts = xy, ya que x = t y y = s−1 = 1
s . Entonces, el resultado final es
xy − 1 = cx3(xy + 2). (2.211)
En la siguiente seccion analizaremos una importantısima clase de ecuaciones diferenciales de primerorden conocidas con el nombre de ecuaciones diferenciales lineales
2.6. Ecuaciones Diferenciales Lineales de Primer Orden
De la definicion dada en Conceptos Basicos” tenemos que una ecuacion diferencial lineal nohomogenea de orden n, se escribe como
an(x) dnydxn + an−1(x) dn−1y
dxn−1 + ....+ a1(x) dydx + a0(x)y = g(x)
De esta expresion se sigue que una ecuacion diferencial lineal no homogenea de primer orden seescribe de la siguiente manera
a1(x) dydx + a0(x)y = g(x)
Debido a que a1(x) 6= 0, podemos dividir esta ultima expresion y obtener
dy
dx+a0(x)a1(x)
y =g(x)a1(x)
.
Toda ecuacion diferencial lineal de primer orden no homogenea se puede escribir en su formaestandar
dydx + P (x)y = f(x) (2.212)

2.6. ECUACIONES DIFERENCIALES LINEALES DE PRIMER ORDEN 41
donde P (x) = a0(x)a1(x) y f(x) = g(x)
a1(x) son funciones continuas de x en un cierto dominio D (tambienpueden ser funciones constantes).
Analizaremos dos metodos para resolver las ecuaciones diferenciales lineales de primer orden nohomogeneas (2.212).
Metodo I: Variacion del Parametro
Supongamos que podemos escribir la ecuacion (2.212), en la forma
dydx + P (x)y = 0 (2.213)
a la cual llamaremos ecuacion homogenea (no en el sentido que vimos anteriormente, sino que eshomogenea porque estamos suponiendo, por un momento, que f(x) = 0).
La solucion, de la ecuacion (2.213), la podemos encontrar separando las variables y despuesintegrando, es decir, ∫
dy
y= −
∫P (x)dx+ ln c. (2.214)
Ahora, integramos y despejamos el logaritmo, tenemos
yh = ce−∫
P (x)dx. (2.215)
Hemos definido yh para recordar que tenemos la solucion de la ecuacion homogenea (2.213), y no lasolucion de la ecuacion (2.212), que es no homogenea. En la expresion (2.215), c es la constante deintegracion o parametro.
Definamos una nueva solucion que llamaremos solucion particular(o complementaria) y la rep-resentaremos como yp. Esta nueva solucion se construye en base a la solucion homogenea (2.215),tomando a c como una funcion dependiente de x, es decir, como c = c(x). La solucion particulartendra la forma
yp = c(x)e−∫
P (x)dx = c(x)y1(x), (2.216)
donde y1(x) = e−∫
P (x)dx. Sustituyendo (2.216), en la ecuacion no homogenea (2.212), tenemos
d
dx[c(x)y1] + P (x)c(x)y1 = f(x) → c(x)
dy1dx
+ y1dc(x)dx
+ P (x)c(x)y1 = f(x). (2.217)
Agrupando terminos
c(x)[dy1dx
+ P (x)y1]
+ y1dc(x)dx
= f(x), (2.218)
pero, la relacion en parentesis es cero, debido a que la funcion y1(x) satisface la ecuacion homogenea(2.213), de tal manera que tenemos
y1dc(x)dx
= f(x). (2.219)
Como vemos, esta es una ecuacion con variables separables. Separando variables e integrando
dc(x) =f(x)y1(x)
dx → c(x) =∫
f(x)e−
∫P (x)dx
dx =∫e∫
P (x)dxf(x)dx. (2.220)

42 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
De acuerdo con la relacion (2.216), tenemos que la solucion particular tiene la forma
yp = y1c(x) = e−∫
P (x)dx
∫e∫
P (x)dxf(x)dx. (2.221)
De tal manera que la solucion general de la ecuacion diferencial lineal no homogenea tiene la forma
y(x) = yh + yp = ce−∫
P (x)dx + e−∫
P (x)dx∫e∫
P (x)dxf(x)dx (2.222)
Si sustituimos la solucion obtenida en la ecuacion (2.212), esta ultima se anulara, mostrando ası queefectivamente la relacion (2.222) es la solucion general de la ecuacion (2.212). Es importante men-cionar que la suma de dos soluciones(homogenea yh y particular yp) es valida solo para ecuacioneslineales.
Ejemplo 1:
Resolver la siguiente ecuacion diferencial
y′ =y
3x− y2. (2.223)
Solucion:
Antes que nada debemos analizar la ecuacion. Vemos que la ecuacion (2.223), es no lineal respectoa y, debido a que hay una y2. Sin embargo, podemos observar que si la ecuacion la vemos respecto ax, esta sera una ecuacion lineal no homogenea. Es decir, tomamos a x como una funcion dependientey a y como la variable independiente. Tenemos
dx
dy− 3yx = −y. (2.224)
Esta es una ecuacion lineal no homogenea de primer orden respecto a x. Primero, hallaremos lasolucion correspondiente a la ecuacion homogenea obtenida de (2.224), esta es
dx
dy− 3yx = 0. (2.225)
La ecuacion (2.225), es una ecuacion con variables separables. Separando las variables e integrando,obtenemos ∫
dx
x− 3
∫dy
y= ln c. (2.226)
Donde hemos escogido, por comodidad, a la constante de integracion c como ln c. Integrando ambaspartes de (2.226), hallamos que la solucion a la ecuacion homogenea es
ln |x| − 3 ln |y| = ln c → xh = cy3. (2.227)
El siguiente paso es encontrar la solucion particular xp de la ecuacion (2.224). Para esto, tomamosla solucion (2.227), y suponemos a c como una funcion de y. La solucion particular tiene la forma
xp = c(y)y3. (2.228)
Derivando (2.228), respecto a y, tenemos
x′p = c′(y)y3 + 3c(y)y2. (2.229)

2.6. ECUACIONES DIFERENCIALES LINEALES DE PRIMER ORDEN 43
Sustituyendo en la expresion (2.224), con el objetivo de hallar a la funcion c(y), obtenemos
c′(y)y3 + 3c(y)y2 − 3yc(y)y3 = −y. (2.230)
Los terminos segundo y tercero del lado izquierdo de (2.230) se eliminan entre si quedando solamentela ecuacion
c′(y) = − y
y3= − 1
y2. (2.231)
Integrando la expresion (2.231), resulta
c(y) = −∫dy
y2=
1y. (2.232)
Una vez encontrada la funcion c(y), la sustituimos en (2.228), y de esta manera obtenemos la solucionparticular
xp =y3
y= y2. (2.233)
Finalmente, tenemos que la solucion general de la ecuacion (2.223), o lo que es lo mismo de (2.224),tiene la forma
x(y) = xh + xp = cy3 + y2. (2.234)
Aquı, c es una constante de integracion, la cual depende de las condiciones iniciales del problema.
Ejemplo 2:
Hallar la solucion de la ecuacion diferencial
xy′ − 2y = 2x4. (2.235)
Solucion:
Suponiendo que x 6= 0, dividimos la ecuacion (2.235), entre x, y obtenemos la ecuacion
y′ − 2xy = 2x3. (2.236)
La ecuacion homogenea correspondiente a (2.236), es
y′ − 2xy = 0. (2.237)
Separando las variables e integrando ∫dy
y= 2
∫dx
x, (2.238)
obtenemos la solucion de la ecuacion homogenea (2.237),
ln y = 2 lnx+ ln c → yh = cx2. (2.239)
El siguiente paso es obtener una solucion particular yp. Para esto, en la solucion homogenea tomamosa la constante c como una funcion de x. Entonces, la solucion particular tiene la forma
yp = c(x)x2. (2.240)
Sustituyendo en la ecuacion (2.236), resulta
c′(x)x2 + 2c(x)x− 2xc(x)x2 = 2x3 → c′(x) = 2x. (2.241)

44 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Integrando esta ultima ecuacion obtenemos el valor de c(x),
c(x) = 2∫xdx = x2. (2.242)
Luego, sustituyendo este valor en (2.240), tenemos que la solucion particular es
yp = x4. (2.243)
Entonces, concluimos que la solucion general de la ecuacion (2.235), es
y(x) = yh(x) + yp(x) = cx2 + x4. (2.244)
Metodo II: Factor Integrante
Sea dada la ecuacion diferencial lineal de primer orden en su forma estandar
dydx + P (x)y = f(x) (2.245)
Supongamos que existe una funcionµ(x) = e
∫P (x)dx, (2.246)
la cual llamaremos factor integrante. Multipliquemos la ecuacion (2.245), por este factor integrante,tenemos
e∫
P (x)dx dy
dx+ P (x)e
∫P (x)dxy = e
∫P (x)dxf(x). (2.247)
La ecuacion (2.247), la podemos escribir como una diferencial total, es decir, como
d(e∫
P (x)dxy)
= e∫
P (x)dxdx. (2.248)
Integrando esta ecuacion, obtenemos
e∫
P (x)dxy =∫e∫
P (x)dxdx+ c, (2.249)
donde c es la constante de integracion. Multiplicando la ecuacion (2.249), por e−∫
P (x)dx, obtenemos
y(x) = ce−∫
P (x)dx + e−∫
P (x)dx∫e∫
P (x)dxf(x)dx (2.250)
Como podemos observar, la expresion (2.250) es identica a la expresion obtenida (2.222), usando elmetodo de variacion del parametro.
Ejemplo 1:
Usando el metodo del factor integrante, resolver la ecuacion diferencial (2.224).
dx
dy− 3yx = −y. (2.251)
Solucion:

2.6. ECUACIONES DIFERENCIALES LINEALES DE PRIMER ORDEN 45
Para este caso el factor integrante sera una funcion de y, es decir
µ(y) = e∫
P (y)dy. (2.252)
De la ecuacion (2.251), podemos identificar a P (y) = − 3y , entonces
µ(y) = e∫
P (y)dy = e−3∫ dy
y = e−3 ln y =1
e3 ln y=
1eln y3 =
1y3. (2.253)
Luego, se toma el diferencial total respecto a y del producto de x por el factor integrante y multi-plicamos la parte derecha de la ecuacion (2.251) por el mismo factor integrante, esto es
d( x
y3
)= − y
y3= − 1
y2. (2.254)
Integrando, tenemosx
y3= −
∫dy
y2=
1y
+ c. (2.255)
De esta ultima expresion, vemos quex(y) = cy3 + y2. (2.256)
La solucion, (2.256), es justamente la solucion obtenida anteriormente (2.234). De tal manera quetenemos dos metodos diferentes para resolver las ecuaciones diferenciales lineales de primer orden.
Ejemplo 2:
Hallar la solucion general de la ecuacion
y = x(y′ − x cosx). (2.257)
Solucion:
La ecuacion (2.257) se puede escribir de la siguiente manera
dy
dx− y
x= x cosx. (2.258)
De la ecuacion, identificamos la funcion P (x) = 1x , y el factor integrante es
µ(x) = e∫
P (x)dx = e−∫
dxx = e− ln x =
1x. (2.259)
Luego, integrando ∫d(yx
)=
∫cosxdx → y
x= senx+ c. (2.260)
Finalmente, la solucion general de la ecuacion (2.257), tiene la forma
y(x) = x(senx+ c). (2.261)
Existen ecuaciones diferenciales que por naturaleza no son lineales. Sin embargo, para cierto tipode ecuaciones no lineales existen sustituciones que las transforman en ecuaciones lineales. Este tipode ecuaciones se analizan en la siguiente seccion.

46 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.7. Ecuaciones Diferenciales Reducibles a Lineales
A toda ecuacion de la forma
dydx + P (x)y = f(x)yn (2.262)
donde n 6= 0, 1 se le conoce como ecuacion de Bernoulli. Se supone que las funciones P (x) y f(x) sonfunciones continuas de x. Los casos n = 0, 1 no se consideran, ya que corresponden a una ecuacionlineal no homogenea, y′+P (x)y = f(x), y a una ecuacion lineal homogenea, y′+[P (x)−f(x)]y = 0,respectivamente.
Si yn 6= 0 podemos escribir la ecuacion (2.262), en su forma equivalente
y−n dy
dx+ P (x)y1−n = f(x). (2.263)
Definiendo una nueva funcion z(x), como
z = y(1−n) (2.264)
la ecuacion (2.263), se transforma en una ecuacion diferencial lineal. Para demostrar lo antes dicho,debemos sustituir la expresion (2.264), en (2.263). Diferenciando la expresion (2.264), obtenemos
dz
dx= (1− n)y−n dy
dx→ dy
dx=
1(1− n)y−n
dz
dx. (2.265)
Sustituyendo en la ecuacion (2.263),
y−n
(1− n)y−n
dz
dx+ P (x)z = f(x). (2.266)
Finalmente, tenemos la ecuacion
dzdx + (1− n)P (x)z = (1− n)f(x) (2.267)
Esta es una ecuacion diferencial lineal respecto a z = z(x), la cual puede ser resuelta por cualquierade los dos metodos estudiados anteriormente.
Ejemplo 1:
Hallar la solucion general de la ecuacion diferencial
y′ + 2y = y2ex. (2.268)
Solucion:
Analizando la ecuacion, vemos que no es lineal respecto a x ni respecto a y. Sin embargo,multiplicando la ecuacion (2.268), por y−2, tenemos
y−2y′ + 2yy−2 = ex → y−2y′ + 2y−1 = ex. (2.269)

2.7. ECUACIONES DIFERENCIALES REDUCIBLES A LINEALES 47
Hagamos la sustitucionz(x) = y−1(x). (2.270)
Diferenciando esta expresion para hallar y′ y sustituirla en (2.269),
dz
dx= −y−2 dy
dx→ dy
dx= − 1
y−2
dz
dx. (2.271)
Sustituyendo en la ultima ecuacion de (2.269), resulta
−y−2
y−2
dz
dx+ 2z = ex → dz
dx− 2z = −ex. (2.272)
Esta ultima ecuacion es una ecuacion diferencial lineal no homogenea respecto a z, la cual podemosresolver con cualquiera de los dos metodos antes vistos(variacion de parametro y factor integrante).Aquı vamos a usar el segundo metodo. Para esto identificamos a P (x) = −2, despues encontramosel factor integrante
µ(x) = e∫
P (x)dx = e−2∫
dx = e−2x. (2.273)
Tomando el diferencial totald(e−2xz) = −exe−2x = −e−x. (2.274)
Integrando, tenemos
e−2xz = −∫e−xdx = e−x + c. (2.275)
Despejando a zz = e2xe−x + ce2x = ex + ce2x. (2.276)
Luego, recordando que hicimos la sustitucion z = y−1, finalmente tenemos la solucion general
1y
= ce2x + ex → (ce2x + ex)y = 1. (2.277)
Ejemplo 2:
Resolver la ecuaciondy
dx+
2xy = 3x2y4/3. (2.278)
Solucion:
Esta ecuacion es de Bernoulli, y la podemos escribir de la siguiente manera
y−4/3 dy
dx+
2xy(1−4/3) = 3x2 → y−4/3 dy
dx+
2xy−1/3 = 3x2. (2.279)
Hagamos la sustitucion
z = y−1/3 → dz
dx= −1
3y−4/3 dy
dx→ dy
dx= −3y4/3 dz
dx. (2.280)
Sustituyendo el resultado anterior en la ultima ecuacion de (2.279), obtenemos la ecuacion lineal
dz
dx− 2
3xz = −x2. (2.281)
Esta ecuacion esta escrita en la forma estandar y podemos usar uno de los dos metodos antes vistospara ecuaciones lineales. Apliquemos el metodo del factor integrante
µ(x) = e∫
P (x)dx = e−23
∫dxx = e−
23 ln x =
1x2/3
. (2.282)

48 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Luego, tenemos
d( z
x2/3
)= − x2
x2/3→ d
( z
x2/3
)= −x4/3. (2.283)
Integrando ∫d( z
x2/3
)= −
∫x4/3dx. (2.284)
Obtenemos
zx−2/3 = −37x7/3 + c → z = −3
7x(7/3+2/3) + cx2/3 → z = −3
7x3 + cx2/3. (2.285)
Finalmente, recordando la sustitucion z = y−1/3, obtenemos el resultado final
y−1/3 = cx2/3 −(3
7
)x3. (2.286)
Ejemplo 3:
Resolver la ecuaciondy
dx− 1x− 1
y =1
x− 1y2. (2.287)
Solucion:
Esta ecuacion se reduce a una ecuacion lineal mediante la siguiente sustitucion
z = y−1 → dz
dx= −y−2 dy
dx→ dy
dx= −y2 dz
dx. (2.288)
Sustituyendo en (2.287), obtenemos la ecuacion lineal respecto a z
dz
dx+
1x− 1
z = − 1x− 1
. (2.289)
Esta ecuacion la resolvemos segun el metodo del factor integrante
µ(x) = e∫ 1
x−1 dx = eln |x−1| = x− 1. (2.290)
Luego
d[(x− 1)z] = − 1x− 1
(x− 1) →∫d[(x− 1)z] = −
∫dx. (2.291)
Integrando(x− 1)z = −x+ c. (2.292)
Recordando el cambio que hicimos z = y−1, obtenemos el resultado final
(x− 1)1y
= (c− x) → y =x− 1c− x
. (2.293)
Observacion:
La ecuacion (2.287), la podemos escribir de la siguiente manera
dy
dx=y2 + y
x− 1=y(y + 1)x− 1
. (2.294)
Esta ecuacion, como podemos ver, es de variables separables∫dy
y(y + 1)=
∫dx
x− 1. (2.295)

2.7. ECUACIONES DIFERENCIALES REDUCIBLES A LINEALES 49
El resultado, obviamente, es el mismo que el obtenido en (2.293). Se deja al estudiante integrar laexpresion (2.295), y comparar con el resultado (2.293).
Analizaremos otro tipo importante de ecuaciones diferenciales reducibles a lineales.Sea la ecuacion
p(x) dydx = q(x)eay + r(x) (2.296)
donde a es una constante y p(x), q(x) y r(x) son funciones continuas de x. Esta ecuacion se puedetransformar en una ecuacion lineal si se sustituye
z = e−ay (2.297)
Como z es una funcion continua de x, derivemos la funcion (2.297), respecto a x, esto es
dz
dx= −ae−ay dy
dx= −az dy
dx. (2.298)
Despejando, tenemosdy
dx= − 1
az
dz
dx. (2.299)
Sustituyendo en la ecuacion (2.296), obtenemos
−p(x)az
dz
dx=q(x)z
+ r(x). (2.300)
Esta ultima expresion la podemos escribir como
dz
dx+ar(x)p(x)
z = −aq(x)p(x)
, p(x) 6= 0. (2.301)
Finalmente, esta ecuacion la podemos escribir en la forma estandar
dzdx + P (x)z = f(x) (2.302)
donde hemos definido P (x) = ar(x)p(x) , y f(x) = −aq(x)
p(x) . De esta manera la ecuacion no lineal (2.296),se transforma en una ecuacion lineal (2.302), mediante la sustitucion (2.297).
Observacion:
Si en lugar de la sustitucion (2.297), hubiesemos elegido z = eay, entonces, la ecuacion (2.296) setransformarıa en una ecuacion de Bernoulli, que a su vez, podemos transformarla en una ecuacionlineal. Habra ocasiones en que tomaremos la sustitucion z = eay.
Ejemplo 4:
Resolver la ecuacion(x− 2)y′ = ey. (2.303)
Solucion:

50 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Para resolver esta ecuacion, hagamos la sustitucion
z = ey → dz
dx= ey dy
dx= z
dy
dx→ dy
dx=
1z
dz
dx. (2.304)
Sustituyendo en la ecuacion (2.303), tenemos
(x− 2)z
dz
dx= z → (x− 2)
dz
dx= z2. (2.305)
Esta ultima ecuacion es de variables separables. Integrando, obtenemos∫dz
z2=
∫dx
x− 2→ −1
z= ln |x− 2|+ ln c. (2.306)
Recordando que z = ey y agrupando los terminos, obtenemos el resultado final
−e−y = ln |c(x− 2)|. (2.307)
2.8. Ecuacion de Riccati
Otro tipo de ecuaciones reducibles a lineales son las ecuaciones de Riccati. A la ecuacion
dydx = q(x) + p(x)y + r(x)y2 (2.308)
donde las funciones q(x), p(x) y r(x) son funciones conocidas, se le conoce como ecuacion diferencialde Riccati . Si p, q, y r son constantes, entonces la ecuacion de Riccati (2.308), es integrable encuadraturas. Separando las variables ∫
dy
ry2 + py + q= x+ c. (2.309)
Cuando r(x) = 0 la ecuacion (2.308), es lineal, y cuando q(x) = 0, esta se reduce a una ecuacionde Bernoulli. En el caso general, la ecuacion (2.308), no es integrable en cuadraturas. Analicemosalgunas importantes propiedades de la ecuacion de Riccati.
Teorema 2.8.1. Dada una solucion particular y1 de la ecuacion de Riccati, entonces su soluciongeneral puede hallarse por cuadraturas.
4 Seay = y1(x), (2.310)
una solucion particular de la ecuacion (2.308), entonces se debe cumplir
y′1(x) = q(x) + p(x)y1 + r(x)y21(x). (2.311)
Hagamos un ”desplazamiento”y(x) = y1(x) + z(x), (2.312)
donde z(x) es la nueva funcion deseada, hasta el momento desconocida. Sustituyendo (2.312), en(2.308), tenemos
dy1(x)dx
+dz(x)dx
= q(x) + p(x)y1(x) + r(x)y21 + p(x)z(x) + 2r(x)y1(x)z(x) + r(x)z2(x). (2.313)

2.8. ECUACION DE RICCATI 51
Debido a que la funcion y1(x) es una solucion particular de (2.308), los terminos marcados connegritas se anulan, quedando, de esta manera, la siguiente ecuacion
dz
dx−
[p(x) + 2r(x)y1(x)
]z = r(x)z2. (2.314)
Esta es una ecuacion de Bernoulli, la cual mediante la sustitucion
u(x) = z(x)−1, (2.315)
nos da como resultado una ecuacion lineal en u(x), esto es
dudx + [p(x) + 2ry1(x)]u(x) = −r(x) 4 (2.316)
Resumiendo:
Dada una solucion particular (2.310), de la ecuacion de Riccati (2.308), y haciendo la transfor-macion lineal (2.312), y la sustitucion(2.315), es decir
y(x) = y1(x) +1
u(x). (2.317)
obtenemos una ecuacion diferencial lineal en u(x) (2.316).
Un caso especial de la ecuacion (2.308), es la llamada ecuacion especial de Riccati , la cual tienela forma
dydx + ay2 = bxα (x > 0) (2.318)
donde a, b y α son constantes. En el caso α = 0, la ecuacion (2.318), se transforma en
dydx + ay2 = b (2.319)
que es una ecuacion con variables separables. En el caso α = −2, tenemos
dy
dx+ ay2 =
b
x2. (2.320)
Haciendo el cambio de variabley(x) =
1z(x)
. (2.321)
la ecuacion (2.320), se transforma en
− 1z2
dz
dx+
a
z2=
b
x2→ dz
dx= a− b
( zx
)2
. (2.322)
Como podemos ver, la ecuacion (2.322), es homogenea y se puede integrar facilmente. Junto conlos valores α = 0,−2 existe una variedad infinita de otros valores de α para los cuales la ecuacionespecial de Riccati (2.318), es integrable. Estos valores de α son
α =4β
1− 2β, (2.323)

52 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
donde β = ±1,±2, ..... Para otros valores de α la solucion de la ecuacion de Riccati no es expresadaen cuadraturas. Si en la ecuacion de Riccati (2.308), se hace el cambio
y(x) =1
au(x)du
dx, (2.324)
donde u(x) es una funcion desconocida, esto nos dara como resultado una ecuacion diferencial desegundo orden
d2u
dx2− abxαu = 0. (2.325)
La solucion de esta ecuacion puede ser expresada en terminos de las funciones de Bessel(las funcionesde Bessel se analizan en el capıtulo 6).
Ejemplo 1:
Resolver la ecuacionx3y′ = x2y + y2 − x2. (2.326)
Solucion:
Escribamos esta ecuacion en la forma
y′ = − 1x
+y
x+y2
x3. (2.327)
Como podemos ver, esta es una ecuacion de Riccati. Para esta ecuacion, y1 = x es una solucionparticular. Por lo tanto, segun (2.317), debemos hacer la sustitucion
y = x+1
u(x). (2.328)
Esto reduce la ecuacion (2.327), a una ecuacion lineal. Derivando la expresion (2.328), tenemos
dy
dx= 1− 1
u2
du
dx. (2.329)
Sustituyendo este resultado en la ecuacion (2.326), resulta
1− 1u2
du
dx=
1x
(x+
1u
)+
1x3
(x+
1u
)2
− 1x. (2.330)
Haciendo un poco de algebra, obtenemos la ecuacion diferencial lineal no homogenea
du
dx+
( 1x
+2x2
)u = − 1
x3. (2.331)
Para resolver esta ecuacion vamos a utilizar el metodo del factor integrante
µ(x) = e
∫ (1x + 2
x2
)dx
= eln xe−2/x = xe−2/x. (2.332)
Luego multiplicando la ecuacion (2.331), y expresandola de la siguiente manera
d[xe−2/xu(x)] = − x
x3e−2/x = − 1
x2e−2/x. (2.333)
Integrando, obtenemos∫d[xe−2/xu(x)] = −
∫1x2e−2/xdx =
12
∫e−2/xd(2/x). (2.334)

2.8. ECUACION DE RICCATI 53
La integracion es facilxe−2/xu(x) = c− x
4e−2/x. (2.335)
De donde el valor de u(x) es,
u(x) =c
xe2/x − 1
4. (2.336)
Sustituyendo el valor encontrado de u(x), en (2.328), obtenemos la solucion general
y = x+1
u(x)= x+
1cxe
2/x − 14
(2.337)
Ejemplo 2:
Resolver la ecuacion de Riccati
x2 dy
dx+ xy + x2y2 = 4. (2.338)
Solucion:
Antes que nada debemos ”adivinar” una solucion particular de la ecuacion (2.338), para despueshaciendo la sustitucion (2.317), obtener la funcion u(x) y de esta manera tener la solucion general.No es difıcil ver que la solucion particular de (2.338), es
y1 =2x. (2.339)
Probemos que (2.339), es solucion de (2.338). Tenemos
dy1dx
= − 2x2. (2.340)
Sustituyendo (2.339), y (2.340), en (2.338), resulta
−x2 2x2
+ x2x
+ x2 4x2
= 4. (2.341)
De donde tenemos la igualdad 4 = 4, esto implica que (2.339), satisface a la ecuacion (2.338). Puesbien, ya tenemos una solucion de la ecuacion de Riccati, hagamos la sustitucion (2.317), esto es
y =2x
+1
u(x). (2.342)
Derivando esta expresiondy
dx= − 2
x2− 1u2
du
dx. (2.343)
Sustituyendo (2.342), y (2.343), en (2.338), tenemos
x2[− 2x2− 1u2
du
dx
]+ x
( 2x
+1u
)+ x2
( 2x
+1u
)2
= 4. (2.344)
Haciendo las operaciones necesarias, obtenemos la ecuacion lineal no homogenea
du
dx− 5xu = 1. (2.345)
Esta ecuacion la vamos a resolver usando el metodo del factor integrante
µ(x) = e∫
P (x)dx = e−5∫
dxx = e−5 ln x =
1x5. (2.346)

54 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Entoncesd( u
x5
)=
1x5
→∫d( u
x5
)=
∫1x5dx. (2.347)
Integrando, resultau
x5= −x
−4
4+ c → u(x) = −x
4+ cx5. (2.348)
Sustituyendo el resultado de u(x) en (2.342), obtenemos la solucion general de la ecuacion (2.338),
y(x) =2x
+4
c1x5 − x, (2.349)
donde hemos redefinido la constante de integracion c1 = 4c.
Ejemplo 3:
Resolver la ecuaciondy
dx+ 2y2 =
1x2. (2.350)
Solucion:
Esta es una ecuacion especial de Riccati(2.320). Por consiguiente, hagamos la sustitucion
y =1
z(x)→ dy
dx= − 1
z2
dz
dx. (2.351)
Sustituyendo en (2.350), obtenemos
− 1z2
dz
dx+
2z2
=1x2
→ dz
dx− 2 = − z
2
x2. (2.352)
La ultima ecuacion en (2.352), es homogenea, ası que podemos hacer la sustitucion
z = u(x)x → dz
dx= u+ x
du
dx. (2.353)
Sustituyendo en la segunda ecuacion de (2.352), resulta
u+ xdu
dx− 2 = −u2. (2.354)
Separando variables e integrando ∫du
u2 + u− 2= −
∫dx
x. (2.355)
La primer integral la podemos resolver por fracciones parciales
1(u+ 2)(u− 1)
=A
(u− 2)+
B
(u− 1). (2.356)
De donde obtenemos los resultados para A = − 13 y para B = 1
3 . Entonces, (2.355), se reduce aintegrar las expresiones
−13
∫du
u+ 2+
13
∫du
u− 1= −
∫dx
x. (2.357)
Al integrar, obtenemos
−13
ln |u+ 2|+ 13
ln |u− 1| = − lnx+ln c3. (2.358)

2.9. ECUACIONES DIFERENCIALES EXACTAS 55
Haciendo uso de las propiedades de los logaritmos, este resultado lo podemos expresar en una formamas compacta
x3(u− 1) = c(u+ 2). (2.359)
Ahora recordemos las sustituciones que hicimos. Tenemos z = 1y y u = z
x = 1xy . Sustituyendo el
valor de u en funcion de x y y, obtenemos el resultado final
x3(1− xy) = c(1 + 2xy). (2.360)
2.9. Ecuaciones Diferenciales Exactas
Supongamos que tenemos una ecuacion diferencial escrita de la siguiente manera
ydx+ xdy = 0. (2.361)
Esta misma ecuacion la podemos escribir como una diferencial total
d(xy) = 0, (2.362)
la cual puede ser facilmente integrada, dandonos como resultado∫d(xy) =
∫0dx → xy = c. (2.363)
Teniendo esto en mente nos podemos hacer la siguiente pregunta: sera posible construir un metodogeneral para resolver este tipo de ecuaciones? La respuesta es sı. Recordemos un poco el calculo.Sabemos que una superficie esta dada por una expresion del tipo
z = f(x, y). (2.364)
Luego, tomando la diferencial total de la funcion (2.364), resulta
dz =∂f
∂xdx+
∂f
∂ydy. (2.365)
Supongamos que la superficie es constante, es decir, z = c, entonces de (2.365), tendremos
∂f
∂xdx+
∂f
∂ydy = 0. (2.366)
Por otro lado, recordemos que toda ecuacion diferencial de primer orden puede ser escrita como
M(x, y)dx+N(x, y)dy = 0 (2.367)
donde M(x, y) y N(x, y) son funciones continuas de las variables x, y. Igualando las ecuaciones(2.366), y (2.367), tenemos que
∂f
∂x= M(x, y),
∂f
∂y= N(x, y). (2.368)
A una ecuacion del tipo (2.367), que satisface las condiciones (2.368), la llamaremos ecuacion dife-rencial exacta . Las ecuaciones (2.366), y (2.367), son exactamente las mismas. Es claro, entonces, quela solucion general de la ecuacion diferencial original estara dada por una familia monoparametricaen el plano xOy, y tendra la forma f(x, y) = c. El siguiente teorema nos da las condiciones necesariasy suficientes para que la ecuacion (2.367), sea una ecuacion diferencial exacta.

56 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Teorema 2.9.1. (ecuacion diferencial exacta) Sean M(x, y) y N(x, y) funciones continuas y conderivadas parciales de primer orden en un dominio D definidas en a < x < b y c < y < d. Entonces,una condicion necesaria y suficiente para que la ecuacion
M(x, y)dx+N(x, y)dy = 0 (2.369)
sea una ecuacion diferencial exacta, es que se cumpla la siguiente relacion
∂M(x,y)∂y = ∂N(x,y)
∂x(2.370)
4 Supongamos que la ecuacion (2.369) es exacta. Entonces, tiene lugar la relacion (2.368).Diferenciando la primer ecuacion respecto a y y la segunda respecto a x, tenemos
∂2f
∂y∂x=∂M(x, y)
∂y,
∂2f
∂x∂y=∂N(x, y)
∂x, (2.371)
lo cual demuestra la condicion necesaria (2.370). Demostremos que en este caso la condicion (2.370),es suficiente. Integrando la primer expresion de (2.368), respecto a x, considerando a y como con-stante
f(x, y) =∫ x
x0
M(x, y)dx+ g(y), (2.372)
donde x0 es la abcisa de cualquier punto del dominio D; g(y) es la constante de integracion quedepende solo de y. Elijamos la funcion g(y), de tal manera que se cumpla la segunda expresion de(2.368). Para esto diferenciamos la ecuacion (2.372), respecto a y, considerando a x constante
∂f
∂y=
∂
∂y
[ ∫ x
x0
M(x, y)dx]
+ g′(y) =∫ x
x0
∂M
∂ydx+ g′(y) = N(x, y). (2.373)
Tomando en cuenta la relacion (2.370), la expresion (2.373) toma la forma∫ x
x0
∂N
∂xdx+ g′(y) = N(x, y) → N(x, y)−N(x0, y) + g′(y) = N(x, y). (2.374)
De donde, g′(y) = N(x0, y), es decir,
g(y) =∫ y
y0
N(x0, y)dy, (2.375)
donde y0 es la ordenada de un punto arbitrario del dominio D, y cualquier constante de integracionarbitraria se considera igual a cero. De las expresiones (2.372), y (2.375), obtenemos
f(x, y) =∫ x
x0
M(x, y)dx+∫ y
y0
N(x0, y)dy. (2.376)
Resumiendo, si en el dominio D no hay puntos singulares de la ecuacion (2.369), y se cumple larelacion (2.370), entonces la integral general de la ecuacion (2.369), se expresa mediante la ecuacion∫ x
x0
M(x, y)dx+∫ y
y0
N(x0, y)dy = c, (x0, y0) ∈ D. 4 (2.377)

2.9. ECUACIONES DIFERENCIALES EXACTAS 57
Ejemplo 1:
Resolver la ecuacion (2− y2
2x2
)dx+
y
xdy = 0. (2.378)
Solucion:
Antes que nada, debemos comprobar que se cumple la relacion (2.370). Para esto identificamoslas funciones
M(x, y) =(2− y2
2x2
), N(x, y) =
y
x. (2.379)
Entonces∂M
∂y= − y
x2
∂N
∂x= − y
x2. (2.380)
Lo que implica que la ecuacion (2.378), es exacta y su integral general es de la forma (2.377), donde(x0, y0) ∈ D. Supongamos que los puntos son x0 = 1, y0 = 0, ya que el punto (1, 0) ∈ D. Entonces,de la expresion (2.377), tenemos ∫ x
1
(2− y2
2x2
)dx+
∫ y
0
ydy = c1. (2.381)
Integrando (2x+
y2
2x
)∣∣∣x1
+y2
2
∣∣∣y0
= c1 → 2x− 2 +y2
2x− y2
2+y2
2= c1. (2.382)
Eliminando y acomodando terminos, obtenemos el resultado final
2x+y2
2x= c, (2.383)
donde c = c1 + 2.
Ejemplo 2:
Hallar la solucion general de la ecuacion diferencial
2x(1 +√x2 − y)dx−
√x2 − ydy = 0. (2.384)
Solucion:
Primero, identificaremos las funciones M(x, y) y N(x, y) y despues veremos si se cumple lacondicion (2.370),
M(x, y) = 2x+ 2x√x2 − y, N(x, y) = −
√x2 − y. (2.385)
Tomando las derivadas parciales, tenemos
∂M
∂y=
122x(x2 − y)−1/2(−1) = −x(x2 − y)−1/2,
∂N
∂x= −1
2(x2 − y)−1/2(2x) = −x(x2 − y)−1/2. (2.386)
La condicion∂M
∂y=∂N
∂x, (2.387)
se cumple. Por lo tanto, la ecuacion (2.384), es exacta. Entonces, existe una funcion f(x, y), tal que
∂f
∂x= M(x, y) = 2x+ 2x
√x2 − y. (2.388)

58 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Integrando respecto a x, obtenemos
f(x, y) =∫
(2x+ 2x√x2 − y)dx+ g(y) = x2 +
23(x2 − y)3/2 + g(y), (2.389)
donde se ha introducido una funcion constante g(y), esto es debido a que tenemos una integracion enderivadas parciales. El siguiente paso es tomar la derivada de la funcion f(x, y) en (2.389), respectoa y e igualar el resultado con la funcion N(x, y), esto es,
∂f
∂y= −2
332(x2 − y)1/2 + g′(y) = N(x, y). (2.390)
Luego∂f
∂y= −(x2 − y)1/2 + g′(y) = −
√x2 − y. (2.391)
De donde obtenemos la expresion g′(y) = 0, la cual al integrar nos da una constante
g(y) = c. (2.392)
Finalmente, tenemos que la solucion general de la ecuacion (2.384), es
x2 +23(x2 − y)3/2 = c. (2.393)
Existen ecuaciones diferenciales con las cuales se pueden formar diferenciales totales y despuesintegrar. Para esto se usan las siguientes formulas
d(xy) = xdy + ydx, d(xy
)=ydx− xdy
y2, d(ln y) =
dy
y, d(y2) = 2ydy
Ejemplo 3:
Resolver la ecuacion(x+ y)dx+ xdy = 0. (2.394)
Solucion:
Escribiendo esta ecuacion de la siguiente manera
xdx+ ydx+ xdy = 0, (2.395)
podemos ver que el segundo y tercer terminos forman una diferencial total d(xy) = ydx + xdy.Tomando esto en cuenta, resulta
xdx+ d(xy) = 0. (2.396)
Integrando, obtenemos ∫xdx+
∫d(xy) = 0 → x2
2+ xy =
c
2. (2.397)
Entonces, la solucion general de la ecuacion (2.394), esta dada por la expresion
x2 + 2xy = c. (2.398)
Observacion:
La ecuacion (2.394), es una ecuacion homogenea y por lo tanto, haciendo la sustitucion y = zxla podemos reducir a una ecuacion con variables separables y despues integrar. Recomendamos al

2.10. FACTOR INTEGRANTE 59
estudiante resolver este mismo ejemplo haciendo la sustitucion y = zx, de esta manera se dara cuentalo interesante que es conocer diferentes alternativas para resolver un mismo problema, y desde luegoescoger la mas eficiente.
Ejemplo 4:
Resolver la ecuacion(3x2 − 2x− y)dx+ (3y2 + 2y − x)dy = 0. (2.399)
Solucion:
Esta ecuacion la podemos escribir en diferenciales totales, es decir, como
d(x3)−d(x2)−ydx−xdy+d(y2)+d(y3) = 0 → d(x3)−d(x2)−d(xy)+d(y2)+d(y3) = 0. (2.400)
Integrando esta ultima expresion∫d(x3)−
∫d(x2)−
∫d(xy) +
∫d(y2) +
∫d(y3) = c, (2.401)
obtenemos el resultado finalx3 + y3 + y2 − x2 − xy = c. (2.402)
Observacion: La ecuacion (2.399), es una ecuacion diferencial exacta, ya que se cumple la relacion(2.370),
∂M
∂y= −1,
∂N
∂x= −1,
y podemos resolverla usando el metodo de las ecuaciones diferenciales exactas. Este ejercicio se dejaal estudiante y desde luego se debe obtener el resultado (2.402).
2.10. Factor Integrante
Existen casos en los cuales la ecuacion (2.369), no es una ecuacion diferencial exacta. Sin embargo,en ciertas ocasiones, excepcionales, se puede encontrar una funcion µ(x, y) tal que multiplicada porla ecuacion (2.369), esta resulte ser una ecuacion diferencial exacta. Supongamos que la ecuacion(2.369), no es una ecuacion exacta. Entonces, multiplicando dicha ecuacion por una funcion µ(x, y),tenemos la ecuacion
µ(x, y)M(x, y)dx+ µ(x, y)N(x, y)dy = 0 (2.403)
A la funcion µ(x, y) se le conoce con el nombre de factor integrante (o factor de integracion).Si queremos que la ecuacion (2.403), sea una ecuacion exacta, esta debera satisfacer la condicionnecesaria y suficiente (2.370). En nuestro caso, para la ecuacion (2.403), debe cumplirse la relacion
∂(µM)∂y
=∂(µN)∂x
. (2.404)
O bienN∂µ
∂x−M
∂µ
∂y= µ
(∂M∂y
− ∂N
∂x
). (2.405)
Esta ecuacion la podemos escribir de la siguiente manera
N
µ
∂µ
∂x− M
µ
∂µ
∂y=
(∂M∂y
− ∂N
∂x
). (2.406)

60 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Finalmente, la escribiremos como
N∂ lnµ∂x
−M∂ lnµ∂y
=∂M
∂y− ∂N
∂x. (2.407)
Hemos obtenido una ecuacion en derivadas parciales. No existe un metodo general para encontrarfactores integrantes µ = µ(x, y). Por consiguiente, nos limitaremos a algunos casos particulares:
Supongamos que el factor integrante µ = µ(x, y) depende solamente de x, esto es, µ = µ(x).En tal caso, tendremos que ∂µ
∂y = 0 y la ecuacion toma la forma
d lnµdx
=1
N(x, y)
(∂M∂y
− ∂N
∂x
). (2.408)
Integrando, tenemos
∫d lnµ =
∫ (∂M∂y − ∂N
∂x
)N(x, y)
dx → µ(x) = e∫ ( ∂M
∂y− ∂N
∂x)
N(x,y) dx. (2.409)
El factor integrante depende solamente de y, es decir, µ = µ(y). En tal caso, tenemos
d lnµdy
=1
M(x, y)
(∂N∂x
− ∂M
∂y
). (2.410)
Integrando, tenemos
∫d lnµ =
∫ (∂N∂x −
∂M∂y
)M(x, y)
dy → µ(y) = e∫ ( ∂N
∂x− ∂M
∂y)
M(x,y) dy. (2.411)
Observese que en las ecuaciones (2.408), y (2.410), las funciones que aparecen a la izquierda de lasecuaciones se escriben como derivadas normales y no como parciales (parte derecha), esto es debidoa que hemos restringido a la funcion µ a que sea una funcion, ya sea de x, o de y, respectivamente.Entonces, para hallar un factor integrante podemos usar las expresiones (2.409), y (2.411).
Ejemplo 5:
Resolver la ecuacion diferencial
(x2 + y2 + x)dx+ ydy = 0. (2.412)
Solucion:
Identifiquemos las funciones M(x, y) y N(x, y), estas tienen la forma
M(x, y) = x2 + y2 + x N(x, y) = y. (2.413)
Primero, debemos comprobar si la ecuacion (2.412), es o no exacta. Tenemos
∂M
∂y= 2y,
∂N
∂x= 0. (2.414)
Como vemos, no se cumple la condicion
∂M
∂y=∂N
∂x, (2.415)

2.10. FACTOR INTEGRANTE 61
y por lo tanto, la ecuacion (2.412), no es exacta. Veamos si podemos encontrar un factor integrante,tal que al multiplicarlo por la ecuacion (2.412), esta se transforme en exacta. Supongamos que elfactor integrante depende solamente de x, esto es, µ(x, y) = µ(x), entonces, de la ecuacion (2.408),tenemos
d lnµdx
=1N
(∂M∂y
− ∂N
∂x
)=
1N
∂M
∂y=
2yy
= 2. (2.416)
Luego, de (2.409), tenemos ∫d lnµ = 2
∫dx. (2.417)
La solucion de estas integrales es trivial y tienen la forma
lnµ = 2x → µ(x) = e2x. (2.418)
El siguiente paso es multiplicar la ecuacion (2.412), por el factor integrante obtenido, esto es porµ(x) = e2x, tenemos
e2x(x2 + y2 + x)dx+ e2xydy = 0 (2.419)
Ahora analizaremos la ecuacion (2.419), es decir, probemos que esta es exacta. Tenemos las funciones
M(x, y) = e2x(x2 + y2 + x) N(x, y) = ye2x. (2.420)
Las derivadas parciales son∂M
∂y= 2ye2x ∂N
∂x= 2ye2x. (2.421)
En este caso la condicion∂M
∂y=∂N
∂x, (2.422)
se cumple. Por lo tanto, la ecuacion (2.419), es exacta. Ahora el problema consiste en resolver laecuacion (2.419). Debido a que la ecuacion (2.419), es una ecuacion diferencial exacta, existe unafuncion f(x, y), tal que
∂f
∂y= N(x, y) = ye2x. (2.423)
Integrando, tenemos
f(x, y) =∫ye2xdy + g(x) =
12y2e2x + g(x), (2.424)
donde la funcion g(x) vendrıa siendo la constante de integracion, ya que tenemos una ecuacion enderivadas parciales. Ahora diferenciando respecto a x la ecuacion (2.424), e igualando el resultadocon la funcion M(x, y) de (2.420), tenemos
∂f
∂x=
22y2e2x + g′(x) = M(x, y). (2.425)
O bieny2e2x + g′(x) = e2x(x2 + y2 + x). (2.426)
Finalmente, tenemos la ecuaciong′(x) = e2x(x2 + x). (2.427)
Ahora debemos integrar la ecuacion (2.427), y de esta manera encontrar la funcion g(x). Escribiendo(2.427), como una suma de dos integrales∫
g(x)dx =∫x2e2xdx+
∫xe2xdx. (2.428)

62 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Calculemos las integrales de la derecha por separado. Primero la integral∫xe2xdx →
u = x du = dx, dv = e2xdx v =
12e2x
=x
2e2x − 1
2
∫e2xdx
=x
2e2x − 1
4e2x. (2.429)
Para la primera integral, tenemos∫x2e2xdx →
u = x2 du = 2xdx, dv = e2xdx v =
12e2x
=x2
2e2x − 2
2
∫xe2xdx
=x2
2e2x −
(12xe2x − 1
4e2x
)=x2
2e2x − x
2e2x +
14e2x. (2.430)
En esta integral hemos aprovechado el resultado obtenido anteriormente en (2.429). Ası que tenemosel valor de la funcion g(x),
g(x) =∫
(x2e2x + xe2x)dx =(x2
2− x
2+
14
+x
2− 1
4
)e2x =
x2
2e2x. (2.431)
Una vez encontrada la funcion g(x), la sustituimos en la ecuacion (2.424). Finalmente, obtenemos
f(x, y) =y2
2e2x +
x2
2e2x = c. (2.432)
Donde c es la constante de integracion. Este mismo resultado lo podemos escribir en una forma maselegante
x2 + y2 = c1e−2x, (2.433)
donde c1 = 2c, es tambien una constante. Esta es la solucion general de la ecuacion (2.419), y desdeluego, tambien es la solucion general de la ecuacion (2.412), ya que, en principio son equivalenteslas dos ecuaciones, pues hemos multiplicado a toda la ecuacion (2.412), por un mismo factor.
2.11. Ley de Enfriamiento
Cada dıa nos encontramos con fenomenos donde hay cambios de temperatura; Un pastel quesacamos del horno a una temperatura T , una taza de cafe caliente, alimentos acabados de cocinar,etcetera. Nos preguntamos; como podemos saber de que manera cambia la temperatura de cada unode estos cuerpos? Hasta el momento, sabemos que cualquier cosa que cambie la podemos modelarmediante una ecuacion diferencial, por lo tanto, lo mas probable es que la pregunta planteadala podamos modelar con una ecuacion diferencial. Podemos plantear la pregunta anterior con laformulacion del siguiente problema general.
Supongamos que en el tiempo t = 0 un cuerpo tiene una temperatura inicial T (0) = T0, en esteinstante lo colocamos en el medio ambiente que tiene una temperatura Tm. Nos preguntamos, comocambiara la temperatura del cuerpo conforme el tiempo pasa.
Solucion:
Sea T (t) la temperatura del cuerpo en un cierto tiempo t. Supongamos que no existe otro cuerpocon el cual haya intercambio de calor, ademas, vamos a suponer que la temperatura del medioambiente Tm cambia tan lento, que practicamente la podemos tomar como constante. Bajo estas

2.11. LEY DE ENFRIAMIENTO 63
condiciones podemos pensar que la rapidez con que cambia la temperatura del cuerpo es proporcionala la diferencia de temperaturas del cuerpo y el medio ambiente. Es decir,
dT
dt∝ T (t)− Tm. (2.434)
Esto parece logico, ya que llegara el momento en que la temperatura del cuerpo y el medio ambienteseran las mismas, es decir, T (t) = Tm y de la expresion (2.434), la velocidad de cambio sera propor-cional a cero y por consiguiente la temperatura del sistema cuerpo-medio ambiente sera proporcionala una constante. Para escribir la ecuacion (2.434), en forma de igualdad, debemos introducir unaconstante de proporcionalidad. Entonces, el modelo matematico esta dado por la ecuacion
dT
dt= −α
(T (t)− Tm
), (2.435)
donde α > 0 es la constante de proporcionalidad(la cual depende de la estructura molecular delcuerpo). El signo menos en la parte derecha de la ecuacion (2.435), corresponde a los siguientesrazonamientos; si T (t)− Tm > 0,→ T (t) > Tm, entonces la temperatura del cuerpo decae(se enfrıa)y por consiguiente, su rapidez de cambio es negativa, por otro lado, si T (t)− Tm < 0,→ T (t) < Tm,entonces la temperatura del cuerpo crece(se calienta) y por lo tanto, la rapidez de cambio es positiva.De esta manera, el proceso de calentamiento(enfriamiento) de un cuerpo en el medio ambiente contemperatura constante se modela bastante bien con la ecuacion diferencial (2.435). La ley (2.435),fue formulada por Isaac Newton y concuerda bastante bien con los datos experimentales. Desde elpunto de vista fısico el problema planteado esta resuelto.
Ahora el problema se traduce a un problema matematico, y es aquı donde se aplican los metodosde solucion de las ecuaciones diferenciales. Como podemos ver, en la ecuacion (2.435), el tiempo tes la variable independiente y la temperatura T (t) es la funcion dependiente. La ecuacion (2.435),es una ecuacion diferencial ordinaria de primer orden y de variables separables, esto es
dT
T (t)− Tm= −αdt. (2.436)
Como la temperatura del medio ambiente Tm se supone constante durante todo el proceso, entoncesla ecuacion (2.436), es facil de integrar∫
dT
T (t)− Tm= −α
∫dt → ln |T (t)− Tm| = −αt+ c. (2.437)
Para hallar el valor de la constante c, usamos las condiciones iniciales del problema, esto es, en elinstante t = 0, el cuerpo tenıa una temperatura inicial T0. Poniendo estas condiciones en la ultimaecuacion de (2.437), tenemos
ln |T0 − Tm| = −α · 0 + c → c = ln |T0 − Tm|. (2.438)
Sustituyendo este resultado en (2.437), resulta
ln |T (t)− Tm| = −αt+ ln |T0 − Tm|. (2.439)
Por ultimo, aplicando las propiedades de los logaritmos obtenemos como cambia la temperatura delcuerpo con el tiempo
T (t) = Tm + (T0 − Tm)e−αt. (2.440)
Finalmente, analizaremos la solucion para ver si el resultado es el esperado. De la expresion (2.440),observamos que cuando el tiempo es suficientemente grande(podemos poner t → ∞), el exponentetiende a cero y por consiguiente, la temperatura T (t) del cuerpo tiende a la temperatura del medio,es decir, T (t) → Tm, cuando t → ∞. De la solucion (2.440), tambien se deduce que cuando t → 0,entonces T (0) → T0. Los resultados son los esperados por lo tanto el problema queda resuelto.

64 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
2.12. Circuitos Electricos
En esta seccion deduciremos el modelo matematico para un sistema electrico de gran importancia,el cual es considerado como una de las piezas fundamentales de las redes electricas. Para estoempezaremos con los conceptos basicos necesarios.
El circuito electrico mas simple es un circuito en serie que consta de una fuente de energa, fuerzaelectromtriz, E(t) la cual puede ser una fuente constante como una baterıa, o bien, una fuente variablecon el tiempo como una corriente alterna (generador), y un resistor, con resistencia R que usa laenergıa (como ejemplo, tenemos una bombilla electrica) (figura 2.2). Si cerramos el interruptor, unacorriente I fluira por el resistor, lo cual producira una caıda de voltaje VR, es decir, el potencialelectrico en los extremos del resistor seran diferentes, esta diferencia de potencial o caıda de voltaje,la podemos medir con un voltımetro.
Luego, haciendo uso de una ley demostrada experimentalmente, la cual afirma que: la caıda delvoltaje VR en un resistor es proporcional a la corriente instantanea I, es decir
VR = RI (2.441)
donde a la constante de proporcionalidad R se le llama resistencia del resistor. Las unidades demediada de la corriente I es el ampere, representado por la letra A, la resistencia R se mide en ohms,Ω y el voltaje VR se mide en volts, V .
Los otros dos elementos fundamentales en un circuito mas completo, son los inductores y loscapacitores . Un inductor se opone a un cambio en la corriente y tiene un efecto de inercia en laelectricidad similar al de la masa en la mecanica. Experimentalmente se ha demostrado la siguienteley: La caıda de voltaje VL en un inductor es proporcional a la razon de cambio instantaneo conrespecto al tiempo de la corriente I, es decir
VL = LdIdt
(2.442)
donde a la constante de proporcionalidad L se le llama inductancia del inductor y se mide en henrios,h, y el tiempo t se mide en segundos s.
Un capacitor C es un elemento que almacena energıa. Experimentalmente se comprobo la sigu-iente ley: la caıda de voltaje VC en un capacitor es proporcional a la carga electrica instantanea qen el capacitor, es decir
VC =1Cq, (2.443)
donde a C se le llama capacitancia del capacitor y se mide en faradios, la carga q se mide en coulombsC.
Por otro lado, la corriente I es la variacion de la carga q respecto al tiempo, esto es
I(t) =dq
dt. (2.444)
Tomando esto en cuenta, la expresion (2.443), se puede escribir como
VC = 1C
∫ t
t0I(τ)dτ (2.445)

2.13. SOLUCION DEL CIRCUITO RL 65
La corriente I(t) se determina resolviendo la ecuacion o ecuaciones que resulten de la aplicacion dela ley de Kirchhoff , la cual es una ley fısica fundamental.
Ley de Tensiones de Kirchhoff La suma algebraica de todas las caıdas de voltaje instantaneasalrededor de cualquier circuito cerrado es cero, o el voltaje aplicado a un circuito cerrado es igual ala suma de las caıdas de voltaje en el resto del circuito.
2.13. Solucion del Circuito RL
Establecer el modelo matematico para el circuito RL de la figura (2.2). Resolver la ecuaciondiferencial obtenida para los siguientes casos: para el primer caso suponga que E(t) = constante ypara el segundo E = E0 cosωt.
Solucion:
Nuestro sistema consta de un resistor con resistencia R y un inductor con inductancia L, figura(2.2).
Figura 2.2: Circuito RL.
Entonces, por la ley de Kircchoff, tenemos que la suma de las caıdas de voltaje debe ser igual ala fuerza electromotriz E(t). La ecuacion que modela a este sistema, tiene la forma
LdI
dt+RI = E(t). (2.446)
Esta ecuacion es un caso particular de la ecuacion (2.443), cuando no existe capacitor. Debemoshallar la corriente en el sistema como funcion del tiempo, esto es I(t).
Primer caso: E(t) = constante = E0, tenemos la ecuacion
LdI
dt+RI = E0. (2.447)
Esta misma ecuacion la podemos escribir como
dI
dt+ αI = A, (2.448)
donde, α = R/L y A = E0/L. Esta ecuacion la resolveremos usando el metodo del factor integrante.El factor integrantes es
µ(t) = e∫
P (t)dt = eα∫
dt = eαt. (2.449)
Luego, tenemos
d(Ieαt) = Aeαt →∫d(Ieαt) = A
∫eαtdt. (2.450)

66 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Integrando, resulta
Ieαt =A
αeαt + c → I(t) =
A
α+ ce−αt. (2.451)
Tomando en cuenta que Aα = E0
R , esta solucion se expresa como
I(t) =E0
R+ ce−αt. (2.452)
Sustituyendo las condiciones iniciales I(0) = 0, obtenemos el valor de la constante de integracion c
0 =E0
R+ c → c = −E0
R. (2.453)
Sustituyendo en (3.450), finalmente tenemos
I(t) =E0
R
(1− e−
RL t
)=E0
R
(1− e
− tτL
), (2.454)
donde se ha introducido la constante τL = LR conocida como constante inductiva de tiempo del
circuito.
Observando la ecuacion (3.452), vemos que a un tiempo suficientemente grande t→∞ el segundotermino de la derecha e−(R/L)t → 0, y como consecuencia la corriente en (3.452), tiende a un valorconstante este es I(t) → E0/R. Este valor constante es el que tendrıa de inmediato (ley de Ohm) sino hubiera un inductor en el circuito, el lımite es independiente de las condiciones iniciales. En lafigura se muestra la solucion particular para el caso I(0) = 0.
Segundo caso: E(t) = E0 cosωt, de la ecuacion (2.442), tenemos
LdI
dt+RI = E0 cosωt, (2.455)
Se pide hallar la corriente I en un tiempo t despues de haber conectado el circuito, si la fuerzaelectromotrız es E(t) = E0 cosωt
Solucion:
La ecuacion (2.455), la escribimos de la siguiente manera
dI
dt+ αI = β cosωt, (2.456)
donde, por comodidad, α = R/L y β = E0/L. La ecuacion (3.453), es una ecuacion diferenciallineal no homogenea de primer orden respecto a la corriente I. Primero, debemos hallar la solucioncorrespondiente a la ecuacion homogenea de (3.453), tenemos
dI
dt+ αI = 0. (2.457)
Esta ecuacion homogenea es de variables separables. Separando las variables e integrando
dI
dt= −αI →
∫dI
I= −α
∫dt → ln
(Ic
)= −αt, (2.458)
donde c es la constante de integracion. Este resultado lo podemos escribir como
I(t) = ce−αt. (2.459)

2.14. SOLUCION DE UN CIRCUITO RC 67
Ahora busquemos una solucion particular de la ecuacion (3.453). Por la forma de la parte derechasupongamos la siguiente solucion particular(metodo de los coeficientes indeterminados)
Ip(t) = A cosωt+B senωt. (2.460)
Derivando esta ecuaciondIpdt
= −Aω senωt+Bω cosωt. (2.461)
Sustituyendo (2.453), y (2.454), en (3.453), tenemos
−Aω senωt+Bω cosωt+ αA cosωt+ αB senωt = β cosωt. (2.462)
Igualando los terminos, encontramos que esta igualdad se cumple, siempre y cuando se cumplan lasexpresiones
Bω + αA = β
−Aω + αB = 0. (2.463)
Resolviendo estas ecuaciones, obtenemos los valores de A y B, esto es
A =αβ
ω2 + α2, B =
ωβ
ω2 + α2. (2.464)
Sustituyendo estos valores en la solucion particular (2.453), tenemos que la solucion particular es
Ip(t) =αβ
ω2 + α2cosωt+
ωβ
ω2 + α2senωt. (2.465)
La solucion general de la ecuacion (3.453), sera I(t) = Ih(t) + Ip(t), esta tiene la forma
I(t) = ce−αt +E0
L(ω2 + α2)
[α cosωt+ ω senωt
], (2.466)
donde hemos sustituido el valor de β = E0/L. La constante c la encontramos de las condicionesiniciales, cuando t = 0, I = 0.
0 = c+αE0
L(ω2 + α2)→ c = − αE0
L(ω2 + α2). (2.467)
Sustituyendo el valor de la constante de integracion en la ecuacion (2.459), finalmente, tenemos
I(t) =E0
L(ω2 + α2)
[α cosωt+ ω senωt− αe−αt
]. (2.468)
Esta es la solucion particular (en el sentido, de que se ha obtenido de la solucion general). Si t→∞,entonces, e−αt → 0 y de (2.468), se sigue que
I(t) ≈ E0
L(ω2 + α2)
(α cosωt+ ω senωt
). (2.469)
2.14. Solucion de un Circuito RC
Establecer el modelo matematico para un circuito RC, figura (2.3) y hallar la corriente delcircuito para los casos: E(t) = constante = E0 y E(t) = E0 senωt.

68 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 2.3: Circuito RC.
Solucion:
Tenemos un circuito que consta de un resistor con resistencia R y un capacitor con una capaci-tancia C, figura (2.3).
Entonces, por la ley de Kirchhoff se tiene la ecuacion
RI +1Cq = E(t). (2.470)
Derivando esta ecuacion respecto al tiempo obtenemos la ecuacion para la corriente I(t)
RdI
dt+
1CI =
dE
dt, (2.471)
la cual podemos escribir comodI
dt+ αI =
1R
dE
dt, (2.472)
Primer caso: Tenemos E(t) = E0, donde E0 es constante, entonces
dI
dt+ αI = 0. (2.473)
Esta es una ecuacion con variables separables, al separar las variables e integrar obtenemos la soluciongeneral
I(t) = ce−t
RC = ce− t
τC . (2.474)
donde τC = RC es a constante capacitiva de tiempo del circuito.
Figura 2.4: Corriente en un circuito RC debida a una fuerza electromtriz constante.
Segundo caso: Para este caso, tenemos E(t) = E0 senωt. Sustituyendo en la ecuacion (2.472),obtenemos
dI
dt+ αI = β cosωt, (2.475)

2.15. CARGA EN EL CONDENSADOR 69
donde α = 1/RC y β = E0ω/R. Esta ecuacion es similar a la ecuacion (2.456), excepto por laconstante β. Entonces, tenemos la solucion general
I(t) = ce− t
τC +E0ω
[1 + (RCω)2]
(RωC senωt+ cosωt
). (2.476)
2.15. Carga en el Condensador
Un condensador de capacitancia C se conecta a un circuito con un voltaje E0 y resistencia R.Hallar la carga q en el condensador en un tiempo t.
Solucion:
En el tiempo t la carga del condensador es q y la corriente es I. En el circuito actua la fuerzaelectromotrız E0, entonces por la ley de Kirchhoff tenemos, la ecuacion
RI +1Cq = E(t). (2.477)
Tomando en cuenta la relacion I(t) = dqdt , la ecuacion (2.477), se escribe como
dq
dt+
1CR
q =E0
R. (2.478)
Esta ecuacion es lineal no homogenea respecto a q. Hallemos la solucion de la ecuacion homogeneacorrespondiente a (2.478),
dq
dt+
1CR
q = 0 →∫dq
q= − 1
CR
∫dt. (2.479)
Integrando, resulta
ln |q| = − t
CR+ ln c1 → q(t) = c1e
−t/RC . (2.480)
La solucion particular de (2.478), la buscamos de la forma
qp = A → dq
dt= 0. (2.481)
Sustituyendo esta solucion en (2.478), para hallar a la constante A, tenemos
A
CR=E0
R→ A = CE0. (2.482)
Poniendo el valor de A en la solucion particular, resulta
qp = CE0. (2.483)
La solucion general de la ecuacion original (2.478), sera la suma de las soluciones; homogenea qh yparticular qp, esto es
q(t) = c1e−t/CR + CE0. (2.484)
Apliquemos las condiciones iniciales para encontrar la constante de integracion c1. Si para t = 0la carga en el condensador es cero, q = 0, entonces, sustituyendo en (2.484), obtenemos para laconstante
0 = c1 + CE0 → c1 = −CE0. (2.485)

70 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Poniendo el valor de c1 en (2.484), obtenemos el resultado final
q(t) = −CE0e−t/CR + E0C → q(t) = E0C
(1− e−t/CR
). (2.486)
Esta expresion representa la solucion del problema. Ahora bien, de la ecuacion (2.486), resulta quepara t = 0, la carga en el condensador es q(t) = 0, esto esta en completo acuerdo, pues antesde conectar el circuito no existe carga alguna en el condensador. Cuando t → ∞, la carga en elcondensador es q(t) → CE0.
Supongase que ahora deseamos conocer la razon de flujo de la carga por unidad de tiempo, omejor dicho, conocer la corriente i que circula por el circuito. La expresion matematica que representaa la corriente I, dada la carga q, es
I(t) =dq
dt. (2.487)
Para obtener la corriente es necesario tomar la derivada respecto al tiempo de la expresion (2.486),obtenemos
I(t) =E0
Re−t/RC . (2.488)
De la ecuacion (2.488), observamos que cuando t→ 0 tenemos que I(t) → E0/R, esta es la maximacorriente en el circuito que se alcanza justamente cuando el circuito se conecta, despues la corrienteesta gobernada por la expresion (2.488).
El producto RC que aparece en el exponente de las ecuaciones (2.486), y (2.488), tiene unidadesde tiempo, ya que el exponente es adimensional (sin unidades). Al producto RC se le conoce comoconstante de tiempo capacitiva y se representa por τC , esta cantidad determina la razon con la cualel condensador se carga.
2.16. Presion Atmosferica
La experiencia nos muestra que la presion del aire (presion atmosferica) depende de la altura h.Si representamos a la presion como p, entonces la dependencia de p respecto a la altura h estara dadapor la funcion
p = p(h). (2.489)
Nos preguntamos, cual es la relacion entre la presion y la altura?.
Solucion:
Para resolver el problema planteado imaginemos una pequena porcion de aire de forma cilındrica,de altura ∆h y base S, figura (2.5).
Luego, veamos cuales fuerzas actuan sobre este cilindro imaginario. De la figura (2.5) podemosver que sobre el cilindro actuan tres fuerzas;
El peso del cilindro dado por
P = g∆m = ρg∆V = gρS∆h,
donde ∆m es el elemento de masa, ∆V = Sdh es el elemento de volumen, g es la constante dela gravedad y ρ es la densidad del aire. Esta fuerza(el peso) esta dirigida verticalmente haciaabajo.

2.16. PRESION ATMOSFERICA 71
Figura 2.5: Diagrama del cilindro representando una porcion de aire
La presion del aire que actua en la base superior, y dirigida hacia abajo, figura (2.5),
p(h+ ∆h)S.
La presion del aire que actua en la base inferior y dirigida verticalmente hacia arriba
Sp(h).
Si consideramos que no hay corrientes de aire, entonces estas tres fuerzas deben estar balanceadas.De estas consideraciones, tenemos
ρSg∆h+ p(h+ ∆h)S = p(h)S. (2.490)
Eliminando a S, resultaρg∆h+ p(h+ ∆h) = p(h). (2.491)
Esta misma ecuacion la podemos escribir como
p(h+ ∆h)− p(h)∆h
= −ρg. (2.492)
Haciendo ∆h, infinitamente pequeno tenemos la expresion
lım∆h→0
p(h+ ∆h)− p(h)∆h
=dp
dh. (2.493)

72 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Luego, igualando las expresiones (2.492) y (2.493), obtenemos la ecuacion diferencial
dp
dh= −gρ. (2.494)
Por otro lado, sabemos que la densidad ρ de los gases es proporcional a la presion p, esto es
ρ = αp, (2.495)
donde α es una constante de proporcionalidad que depende del tipo de gas. Poniendo este valor en(2.494), finalmente tenemos la ecuacion diferencial
dp
dh= −αgp. (2.496)
Esta ecuacion nos da la dependencia de la presion p en funcion de la altura h, por lo tanto, respondeal problema planteado(bajo las condiciones de que no hay corrientes de aire). Ahora el problemase traduce en un problema matematico, es decir, en resolver la ecuacion diferencial (2.496). Comopodemos ver, esta ecuacion es de variables separables. Por consiguiente, separando las variables eintegrando ∫
dp
p= −αg
∫dh, (2.497)
obtenemosln |p| = −αgh+ ln c → p(h) = ce−αgh. (2.498)
Para determinar el valor de la constante de integracion c, vamos a considerar que la presion at-mosferica en la superficie de la Tierra( esto es cuando h = 0), es p0. Sustituyendo estas condicionesen la segunda ecuacion de (2.498), encontramos
c = p0. (2.499)
Sustituyendo este valor en la segunda ecuacion de (2.498), tenemos finalmente el resultado
p(h) = p0e−αgh, (2.500)
el cual nos indica que la presion atmosferica decae exponencialmente conforme la altura aumenta ycuando h→∞, la presion p→ 0, figura (2.6). Esto parece logico, ya que despues de cierta altura h,estarıamos fuera de la atmosfera terrestre y por lo tanto, la presion atmosferica sera cero.
Figura 2.6: La presion p como funcion de la altura h

2.17. ECUACIONES DIFERENCIALES NO RESUELTAS RESPECTO A LA DERIVADA 73
2.17. Ecuaciones Diferenciales no Resueltas Respectoa la Derivada
Hasta el momento hemos analizado diferentes tipos de ecuaciones diferenciales de primer orden,donde hemos supuesto que la ecuacion es resuelta respecto a su derivada. Sin embargo, existenalgunas ecuaciones en las cuales no es posible resolver respecto a su derivada, sino que puedenser resueltas respecto a la funcion dependiente o a la variable independiente. En esta seccion nosencargaremos de analizar este tipo de ecuaciones.
Sea dada la ecuacion diferencial de primer orden
F (x, y, y′) = 0 (2.501)
Esta ecuacion la podemos resolver de dos maneras:
Resuelta respecto a la derivada. Resolviendo (2.501), respecto a la derivada obtenemos unaecuacion del tipo
y′ = f(x, y). (2.502)
Diferentes tipos y metodos para obtener la solucion de la ecuacion (2.502), los hemos analizadoen las secciones anteriores.
No resuelta respecto a la derivada. Supongamos que en la ecuacion (2.501), no se puede despejara y′, pero se puede despejar a y, o a x, es decir, que la ecuacion (2.501), se puede escribir delas dos siguientes maneras
y = f(x, y′) x = g(y, y′) (2.503)
Primero, analizaremos la ecuacion
y = f(x, y′) (2.504)
Para resolver esta ecuacion introduzcamos el parametro
p(x) = y′ =dy
dx→ dy = p(x)dx. (2.505)
De la ecuacion (2.504), obtenemosy = f(x, p). (2.506)
Luego, obteniendo la diferencial total de esta ecuacion
dy =∂f
∂xdx+
∂f
∂pdp. (2.507)
Sustituyendo, dy = p(x)dx, en la ecuacion (2.507), tenemos
p(x)dx =∂f
∂xdx+
∂f
∂pdp. (2.508)
Luego, agrupando terminos resulta la ecuacion[∂f∂x
− p(x)]dx+
∂f
∂pdp = 0. (2.509)

74 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Esta ecuacion es equivalente a tener la ecuacion
M(x, p)dx+N(x, p)dp = 0. (2.510)
Si la solucion de la ecuacion (2.510), esta dada como
x = φ(p, c), (2.511)
entonces, haciendo uso de la expresion (2.506), obtenemos la solucion de la ecuacion original(2.504), en forma parametrica
x = φ(p, c), y = f(φ(p)). (2.512)
Analicemos la segunda ecuacion de (2.503),
x = g(y, y′). (2.513)
La solucion de esta ecuacion es similar a la anterior. Sea
p(x) = y′ =dy
dx. (2.514)
Entonces, de (2.513), tenemosx = g(y, p). (2.515)
La diferencial total de esta ecuacion es
dx =∂g
∂ydy +
∂g
∂pdp. (2.516)
Luego, de (2.514),
dx =dy
p. (2.517)
Sustituyendo en (2.516),dy
p=∂g
∂ydy +
∂g
∂pdp. (2.518)
Agrupando terminos, obtenemos [∂g∂y
− 1p
]dy +
∂g
∂pdp = 0. (2.519)
Esta ecuacion es equivalente a la ecuacion
M(y, p)dy +N(y, p)dp = 0. (2.520)
Si la solucion de esta ecuacion esy = φ(p, c), (2.521)
entonces, haciendo uso de la expresion (2.515), obtenemos la solucion de la ecuacion original(2.513), en forma parametrica
y = φ(p, c), x = g(φ(p)). (2.522)
Ejemplo 1:
Resolver la ecuacionx = (y′)3 + y′. (2.523)

2.17. ECUACIONES DIFERENCIALES NO RESUELTAS RESPECTO A LA DERIVADA 75
Solucion:
Introduzcamos el parametro p = dydx , entonces, tenemos la ecuacion
x = p3 + p. (2.524)
Tomando la diferencial total de esta ecuacion
dx = 3p2dp+ dp. (2.525)
Luego, de la expresion p = dydx , tenemos que dx = dy
p . Sustituyendo esta expresion en laecuacion (2.525),
dy
p= 3p2dp+ dp → dy = (3p3 + p)dp. (2.526)
Integrando esta ultima expresion obtenemos la solucion∫dy =
∫(3p3 + p)dp → 4y(p) = 3p4 + 2p2 + c. (2.527)
Entonces, la solucion general de la ecuacion (2.523), en forma parametrica, es
4y(p) = 3p4 + 2p2 + c, x(p) = p3 + p. (2.528)
Ejemplo 2:
Resolver la ecuacionx =
1y′
+ ln y′. (2.529)
Solucion:
Introduciendo el parametro
p =dy
dx, (2.530)
la ecuacion (2.529), se reduce a la ecuacion parametrica
x =1p
+ ln p. (2.531)
Tomando la derivada total, resulta
dx = − 1p2dp+
1pdp. (2.532)
Sustituyendo dx = dyp en (2.532), obtenemos
dy
p= − 1
p2dp+
1pdp → dy =
(− 1p
+ 1)dp. (2.533)
Integrando ∫dy =
∫ (− 1p
+ 1)dp → y = − ln p+ p+ c. (2.534)
Finalmente, tenemos la solucion general de la ecuacion (2.529), en forma parametrica
x =1p
+ ln p, y = − ln p+ p+ c. (2.535)

76 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Ejemplo 3:
Resolver la ecuacion(y′ + 1)3 = (y′ − y)2. (2.536)
Solucion:
Antes que nada, de la ecuacion (2.536), despejamos a y,
y = y′ ∓ (y′ + 1)3/2. (2.537)
Definiendody
dx= p. (2.538)
Sustituyendo en (2.537), obtenemos
y = p∓ (p+ 1)3/2. (2.539)
Tomando la diferencial total de esta ecuacion y reemplazando dy = pdx, resulta
pdx = dp∓ 32
√p+ 1dp → dx =
dp
p∓ 3
2
√p+ 1p
dp (2.540)
Integrando ∫dx =
∫dp
p∓ 3
2
∫ √p+ 1p
dp. (2.541)
Calculando por separado la integral∫ √p+ 1p
dp→[t =
√p+ 1, dt =
12(p+ 1)−1/2dp =
12tdp, dp = 2tdt
], (2.542)
con este cambio de variable la integral se transforma en∫ √p+ 1p
dp = 2∫
t2
t2 − 1dt = 2
∫t2 − 1 + 1t2 − 1
dt = 2∫ (
1 +1
t2 − 1
)dt. (2.543)
Usando la formula∫
dxx2−a2 = 1
2a ln∣∣∣x−ax+a
∣∣∣ + c. Tenemos
2∫ (
1 +1
t2 − 1
)dt = 2t+ ln
∣∣∣ t− 1t+ 1
∣∣∣. (2.544)
Recordando el cambio de variable que se hizo en (2.542), es decir, t =√p+ 1, se tiene el valor
de la integral ∫ √p+ 1p
dp = 2√p+ 1 + ln
∣∣∣√p+ 1− 1√p+ 1 + 1
∣∣∣. (2.545)
Finalmente, sustituyendo el valor de esta integral en la segunda ecuacion de (2.541), y calcu-lando las dos integrales restantes, y junto con la ecuacion (2.539), tenemos la solucion general
x = ln |p| ∓ 3√p+ 1∓ 3
2ln
∣∣∣√p+ 1− 1√p+ 1 + 1
∣∣∣ + c,
y = p∓ (p+ 1)3/2. (2.546)

2.18. ECUACIONES DIFERENCIALES DE LAGRANGE Y CLAIRAUT 77
2.18. Ecuaciones Diferenciales de Lagrange y Clairaut
Las ecuaciones de Lagrange y Clairaut son casos particulares de las ecuaciones no resueltasrespecto a la derivada (2.503), y pueden resolverse mediante la introduccion del parametro p, comolo hicimos en la seccion anterior.
Una ecuacion diferencial de Lagrange tiene la forma
y = xϕ(y′) + ψ(y′) (2.547)
Haciendo y′ = p, diferenciando y sustituyendo dy por pdx, esta ecuacion se reduce a otra queconsiderando a x como funcion de p sera lineal. Resolviendo esta ultima tendremos la solucionx = φ(p, c), entonces, la solucion general de la ecuacion inicial en forma parametrica es
x = φ(p, c),y = φ(p, c)ϕ(p) + ψ(p), (2.548)
donde p es un parametro.
La ecuacion diferencial de Clairaut tiene la forma
y = xy′ + ψ(y′) (2.549)
El metodo de solucion es el mismo que hemos usado anteriormente para la ecuacion de Lagrange(2.547). La solucion general de esta ecuacion tiene la forma
y = cx+ ψ(c). (2.550)
Ejemplo 1:
Resolver la ecuacion de Lagrange.
y + xy′ = 4√y′. (2.551)
Solucion:
Primero, introduzcamos el parametro p = dydx . La ecuacion (2.551) se transforma en
y + xp = 4√p. (2.552)
Diferenciando esta ecuacion respecto a x, tenemos
dy + xdp+ pdx =2√pdp. (2.553)
Sustituyendo dy por pdx en (2.553), tenemos la ecuacion
pdx+ xdp+ pdx =2√pdp. (2.554)
Ahora, dividiendo entre dp, obtenemos
2pdx
dp+ x− 2
√p
= 0. (2.555)

78 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Como podemos ver, la ecuacion (2.555), es una ecuacion lineal no homogenea respecto a x, la cualpodemos escribir en la forma estandar
dx
dp+
12px = p−3/2. (2.556)
Para resolver esta ecuacion usamos el metodo de variacion del parametro. Para esto, primero bus-camos la solucion a la ecuacion homogenea
dx
dp+
12px = 0. (2.557)
No es difıcil obtener la solucion de esta ecuacion. Separando variables e integrando, obtenemos
xh(p) = cp−1/2. (2.558)
Luego, busquemos la solucion particular de la ecuacion (2.556). Supongamos la solucion particular
xp(p) = c(p)p−1/2. (2.559)
Tomando la derivada respecto a p, resulta
dx
dp= c′(p)p−1/2 − 1
2p−3/2. (2.560)
Sustituyendo en (2.556), obtenemos
c′p−1/2 − 12cp−3/2 +
12pcp−1/2 = p−3/2. (2.561)
Eliminando los terminos segundo y tercero de la parte izquierda de la ecuacion (2.561). Obtenemosla integral
c(p) =∫dp
p= ln |p|. (2.562)
Sustituyendo c(p) en (2.559), la solucion particular toma la forma
xp(p) =ln |p|√p. (2.563)
La solucion general de la ecuacion (2.551), resulta ser
x(p) = xh + xp =c√p
+ln |p|√p. (2.564)
Por otro lado, sustituyendo (2.564), en la relacion (2.552), tenemos
y =√p(4− ln |p| − c). (2.565)
Entonces, tenemos que la solucion general de la ecuacion (2.551), esta dada en forma parametrica
x(p) =c√p
+ln |p|√p.
y(p) =√p(4− ln |p| − c). (2.566)
Ejemplo 2:

2.18. ECUACIONES DIFERENCIALES DE LAGRANGE Y CLAIRAUT 79
Resolver la ecuaciony = x(y′)2 − y′. (2.567)
Solucion:
Introduzcamos el parametro p = dydx . Sustituyendo en la ecuacion (2.567),
y = xp2 − p. (2.568)
Tomando la diferencial de esta ecuacion y sustituyendo dy por pdx, resulta
pdx = p2dx+ 2xpdp− dp. (2.569)
Agrupando terminosp(1− p)dx = (2xp− 1)dp. (2.570)
Escribamos esta ecuacion de la siguiente manera
dx
dp+
2p− 1
x =1
p(p− 1). (2.571)
Esta es una ecuacion lineal no homogenea respecto a x. Esta ecuacion la vamos a resolver con elmetodo del factor integrante. Para esto, definamos
µ(p) = e∫ 2
p−1 dp = eln(p−1)2 = (p− 1)2. (2.572)
Entonces
d[x(p− 1)2
]=
(p− 1)2
p(p− 1)dp =
p− 1p
dp. (2.573)
Integrando, tenemos∫d[x(p− 1)2
]=
∫p− 1p
dp → x(p− 1)2 = p− ln |p|+ c → x(p) =p− ln |p|+ c
(p− 1)2. (2.574)
Entonces, el resultado final es
y(p) = xp2 − p,
x(p) =p− ln |p|+ c
(p− 1)2. (2.575)
Ejemplo 3:
Resolver la ecuacion de Clairaut.
y = xy′ +a
2y′donde a = const. (2.576)
Solucion:
Hagamos p = dydx , obtenemos
y = xp+a
2p. (2.577)
Diferenciando esta ultima expresion y sustituyendo dy por pdx, hallamos
pdx = pdx+ xdp− a
2p2dp, (2.578)

80 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
de donde obtenemosdp
(x− a
2p2
)= 0. (2.579)
Examinemos los dos factores de esta ultima expresion. Primero, si
dp = 0, (2.580)
integrando tenemosp = c. (2.581)
Entonces, la solucion general de la ecuacion inicial es
y = cx+a
2c. (2.582)
Ahora, igualando a cero el segundo factor de la ecuacion (2.579), tenemos
x =a
2p2. (2.583)
Despejando el parametro p de la ecuacion (2.583), y sustituyendo en la ecuacion (2.577), tenemos
y2 = 2ax. (2.584)
Esta es tambien una solucion de la ecuacion (2.576). Desde el punto de vista geometrico la curvay2 = 2ax es la envolvente del haz de rectas determinado por la solucion general.
Ejemplo 4:
Resolver la ecuacion diferencial
y = xy′ +√
(y′)2 + 1. (2.585)
Solucion:
Esta es una ecuacion de Clairaut. Entonces, introduciendo el parametro p = dydx , la expresion
(2.585), se transforma eny = xp+
√p2 + 1. (2.586)
Tomando la diferencial de esta expresion respecto a x, resulta
dy = pdx+ xdp+12(p2 + 1)−1/22pdp → dy = pdx+ xdp+
pdp√p2 + 1
. (2.587)
Sustituyendo pdx por dy, tenemos
pdx = pdx+ xdp+pdp√p2 + 1
. (2.588)
De esta ultima expresion se tiene (x+
p√p2 + 1
)dp = 0. (2.589)
De donde, tenemos dos posibles soluciones
x = − p√p2 + 1
, p = c. (2.590)
Finalmente, la solucion del problema la podemos escribir como
y = px+√p2 + 1, x = − p√
p2 + 1, y = cx+
√c2 + 1. (2.591)
Hasta el momento hemos analizado diferentes metodos de solucion de las ecuaciones diferencialesde primer orden. En las siguientes dos secciones analizaremos algunas cuestiones interesantes de lasecuaciones de primer orden desde el punto de vista geometrico.

2.19. ISOCLINAS 81
2.19. Isoclinas
Nos interesa analizar el sentido geometrico de la ecuacion diferencial de primer orden. Supon-gamos que nos es dada una ecuacion diferencial de primer orden resuelta respecto a la derivada
y′ = f(x, y) (2.592)
entonces, sea y = φ(x, c), su solucion general. Como ya hemos visto anteriormente, la solucion generaldetermina la familia de curvas integrales en el plano xOy. Para todo punto M(x, y) con coordenadasx, y, la ecuacion (2.592), determina un valor de la derivada y′, es decir, la pendiente a la curvaintegral que pasa por ese punto. Por lo tanto, la ecuacion (2.592), define un conjunto de direcciones.A este conjunto de direcciones se le conoce como campo de direcciones en el plano xOy.
La terna de numeros (x, y, y′) determina la direccion de una recta que pasa por el punto M(x, y).El conjunto de los segmentos de estas rectas sera la representacion geometrica del campo de direc-ciones.
Entonces, integrar una ecuacion diferencial desde el punto de vista geometrico, consiste en hallarlas curvas, cuyas pendientes esten orientadas de modo tal que su direccion coincida con la direcciondel campo en estos puntos.
El problema anterior se resuelve introduciendo las isoclinas . Las isoclinas son el lugar geometricode puntos en los que las pendientes a las curvas integrales dadas tienen una misma direccion. Lasisoclinas o campos de direcciones es una forma numerica y geometrica de mostrar la solucion deecuaciones diferenciales de primer orden (2.592). Entonces, la familia de las isoclinas de la ecuacion(2.592), debera cumplir la relacion
f(x, y) = k (2.593)
donde k es un parametro arbitrario. Dandole valores numericos proximos al parametro k se puededibujar un conjunto compacto de isoclinas, con ayuda de las cuales se pueden trazar aproximada-mente las curvas integrales de la ecuacion diferencial (2.592).
Las isoclinas nulas , esto es,
y′ = f(x, y) = 0 (2.594)
proporcionan las lıneas en las que pueden estar situados los puntos maximo y mınimo de las curvasintegrales. Al trazar las curvas integrales, para mayor exactitud, se halla tambien el lugar geometricode los puntos de inflexion. Para esto, se calcula y′′ de la ecuacion (2.592), tenemos
y′′ =∂f
∂x+∂f
∂yy′ =
∂f
∂x+ f(x, y)
∂f
∂y, (2.595)
y se iguala a cero. La lınea determinada por la ecuacion
∂f
∂x+ f(x, y)
∂f
∂y= 0, (2.596)
es, precisamente, el lugar geometrico de los puntos de inflexion.
Ejemplo 1:

82 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Usar el metodo de isoclinas para resolver la ecuacion
dy
dx= y. (2.597)
Solucion:
Las isoclinas asociadas a la ecuacion (2.597), son las rectas dadas por la ecuacion
f(x, y) = y = k. (2.598)
Para cada valor de k obtenemos una lınea recta, en la que en cada punto, la direccion dictada porla ecuacion diferencial es dicho numero k. Por ejemplo, en cada punto a lo largo de la lınea y = 1,la ecuacion (2.597) determina una direccion de la pendiente 1. En la figura se han trazado varias deestas isoclinas, que indican la direccion asociada con cada isoclina por rayas cortas. Si se parte decualquier punto del plano y se sigue una curva cuya direccion es siempre la de las rayas, se obtieneuna curva de solucion. En la figura se han trazado varias curvas de solucion.
Ejemplo 2:
Usando el metodo de isoclinas integrar la ecuacion
dy
dx= x. (2.599)
Solucion:
La familia de isoclinas para esta ecuacion esta definida por la ecuacion
f(x, y) = x = k. (2.600)
Dandolo los valores k = 0, 1, −1, .. obtenemos las isoclinas x = 0, x = 1, x = −1, ... de donde,entonces construimos las curvas integrales de la ecuacion (2.599). La isoclina nula
f(x, y) = k = 0, (2.601)
define el lugar geometrico del extremo de la curva integral (la lınea x = 0 en el ejemplo).
Para reforzar la grafica es recomendable analizar si la curva es convexa hacia arriba o convexahacia abajo, y hallar los puntos de infleccion de las curvas. En nuestro caso, tenemos
y′′ = 1. (2.602)
Por consiguiente, todas las curvas integrales son convexas descendentes y sin puntos de infleccion.
2.20. Trayectorias Ortogonales
Otro problema general, de naturaleza geometrico, es hallar curvas que intercepten las curvasde una familia dada, de una manera deseada. Tales curvas se llaman trayectorias. En particular,cuando las trayectorias cortan las curvas dadas en un angulo constante, se denominan trayectoriasisogonales, si el angulo es recto(es decir, de 900), las trayectorias se llaman trayectorias ortogonales.
De la geometrıa Euclidiana, sabemos que dos curvas son perpendiculares entre sı en un puntodado, si sus respectivas pendientes m1 y m2 cumplen la relacion
m1m2 = −1 → m1 = − 1m2
. (2.603)

2.20. TRAYECTORIAS ORTOGONALES 83
Por otro lado, sabemos que la derivada, desde el punto de vista geometrico, es igual a la pendientem. Entonces, la ecuacion diferencial de las trayectorias ortogonales de un conjunto de curvas dadases facil de obtener a partir del conjunto dado. Sea y(x), un conjunto de curvas dado por la ecuaciondiferencial
F (x, y, y′) = 0 (2.604)
Entonces, la expresion
F (x, y,− 1y′ ) = 0 (2.605)
sera la ecuacion diferencial de las trayectorias ortogonales a y(x). En otras palabras, basta reem-plazar y′ por − 1
y′ en la ecuacion dada, para obtener la ecuacion de las trayectorias ortogonales. Lastrayectorias ortogonales se encuentran, por ejemplo, cuando se estudia una corriente plana de unlıquido.
Ejemplo 1:
Hallar las trayectorias ortogonales a la familia de curvas dada por la ecuacion
x2 + y2 = R2. (2.606)
Solucion:
Tomando la derivada respecto a x, tenemos
2xdx+ 2ydy = 0 → dy
dx= −x
y. (2.607)
Esta es la ecuacion diferencial que representa a la familia de curvas dada (2.606). Ahora, reemplazan-do y′ por − 1
y′ , en la segunda ecuacion de (2.607), tenemos
− 1y′
= −xy
→ dy
dx=y
x, (2.608)
Esta ultima ecuacion representa la ecuacion diferencial de la familia de curvas que es ortogonal a(2.606). Esta ecuacion se puede resolver con el metodo de variables separables
dy
y=dx
x. (2.609)
La solucion general esta dada pory = cx. (2.610)

84 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 2.7: Grafica de la solucion.
Ası, hemos encontrado una familia de curvas dada por la ecuacion (2.610), que es ortogonal a lafamilia de curvas representada por (2.606), figura (2.7).
Ejemplo 2:
Hallar las trayectorias ortogonales a la familia de curvas dadas por la ecuacion
x2 +12y2 = a2, a = constante. (2.611)
Solucion:
Diferenciando la ecuacion (2.611), respecto a x, tenemos
2x+ ydy
dx= 0 → dy
dx= −2x
y. (2.612)
Luego, reemplazando en (2.612), y′ por − 1y′ , tenemos
− 1y′
= −2xy
→ dy
dx=
y
2x. (2.613)
Separando variables e integrando ∫dy
y=
12
∫dx
x. (2.614)
Obtenemosln |y| = 1
2lnx+ ln c → ln
∣∣∣ y
c√x
∣∣∣ = 0. (2.615)

2.20. TRAYECTORIAS ORTOGONALES 85
De donde es facil obtener el resultado final
y = cx1/2. (2.616)
Esta ecuacion representa la familia de curvas ortogonales a la familia dada en (2.611).
Ejemplo 3:
Hallar la familia de curvas que es ortogonal a la familia dada por la ecuacion
y2 + 3x2 − 2ax = 0, a = constante. (2.617)
Solucion:
Diferenciando (2.617), respecto a x, obtenemos
2ydy
dx+ 6x− 2a = 0. (2.618)
Luego, de (2.617), despejamos el parametro a,
a =y2 + 3x2
2x. (2.619)
Sustituyendo (2.619), en (2.618), obtenemos la ecuacion diferencial correspondiente a la familia decurvas (2.617)
dy
dx=y2 − 3x2
2xy. (2.620)
Reemplazando y′, por − 1y′ , en (2.620), resulta
− 1y′
=y2 − 3x2
2xy→ dy
dx= − 2xy
y2 − 3x2. (2.621)
Esta ecuacion es una ecuacion diferencial homogenea. Por lo tanto, haciendo la sustitucion
y = zx,dy
dx= z + x
dz
dx. (2.622)
Sustituyendo en (2.621), se obtiene
xdz
dx=z − z3
z2 − 3. (2.623)
Separando las variables e integrando ∫z2 − 3z − z3
dz =∫dx
x. (2.624)
La primer integral la descomponemos en fracciones parciales
z2 − 3z(1− z2)
=A
z+Bz + C
1− z2. (2.625)
Como resultado tenemosA−Az2 +Bz2 + Cz = z2 − 3. (2.626)
De aquı, obtenemos los valores A = −3, B = −2 y C = 0. Entonces, la primer integral en (2.624),se transforma en ∫
z2 − 3z − z3
dz = −3∫dz
z+
∫2z
z2 − 1dz. (2.627)

86 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Luego, poniendo este resultado en (2.624), obtenemos
−3∫dz
z+
∫2z
z2 − 1dz =
∫dx
x. (2.628)
La integracion es facil y el resultado es
−3 ln |z|+ ln |z2 − 1| = ln |x|+ ln c → ln∣∣∣z2 − 1cxz3
∣∣∣ = 0 → z2 − 1 = cxz3. (2.629)
Recordamos que y = zx de donde z = y/x, sustituyendo en la ultima expresion de (2.629), obtenemosel resultado final
y2 − x2 = cy3. (2.630)
Esta es la ecuacion que representa a la familia de curvas que son ortogonales a la familia (2.617).
De esta manera hemos analizado diferentes metodos de solucion de las ecuaciones diferencialesordinarias de primer orden. Los metodos analizados son los mas tradicionales y basicos para que elestudiante comprenda y pueda resolver problemas de su correspondiente area, Ciencias o Ingenierıa.
2.21. Aplicaciones
Para modelar, mediante una ecuacion diferencial, un proceso fısico, quımico, biologico, de in-genierıa, etc., es necesario el conocimiento de ciertas leyes fundamentales de la naturaleza. Por loanterior, antes de empezar con algunas de las aplicaciones, es necesario que recordemos algunasleyes.
Segunda ley de Newton: La suma de todas las fuerzas que actuan en un cuerpo es igual a lamasa del cuerpo multiplicada por su aceleracion. Matematicamente, esta ley se representa como
ΣNi=1
~Fi = m~a.
Leyes de Kirchhoff:
Primera ley de Kirchhoff (regla de los nudos): La suma algebraica de las corrientes convergentesen un nudo es igual a cero, esto es
Σni=1Ii = 0,
donde I representa la corriente.
Segunda ley de Kirchhoff (regla de los contornos): En cualquier contorno cerrado, elegidoarbitrariamente en un circuito electrico bifurcado, la suma algebraica de los productos de lasintensidades de las corrientes Ii por las resistencias Ri de las partes correspondientes de estecontorno, es igual a la suma algebraica de las fuerzas electromotrices (fem) Ei, aplicadas almismo, esto es
Σi=n1i=1 IiRi = Σi=n1
i=1 Ei .
Ley de Torricelli: La velocidad con que se derrama un lıquido por un pequeno orificio que seencuentra en el fondo de un recipiente a una altura h del nivel del lıquido, sin considerar la fric-cion(debida a la contraccion que sufre un chorro de agua al pasar por un pequeno orificio) , sera iguala la velocidad de caıda libre de un cuerpo de una altura h, esto es, v =
√2gh. Si se considera la fric-
cion, entonces la dependencia de la velocidad respecto a la altura h, esta dada por la ley de Torricelli

2.21. APLICACIONES 87
v = µ√
2gh, donde g es la aceleracion en caıda libre; µ es el coeficiente de friccion, (0 ≤ µ < 1), quedepende del tipo de lıquido que se vacıa. Para el agua µ = 0,62.
Ley de Accion de masa: El estudio de las velocidades de las reacciones se basa en la leyde accion de masa; en un sistema con volumen constante, la velocidad de una reaccion quımicaes proporcional a la concentracion(masa por unidad de volumen) de las sustancias reactantes. Laconcentracion es igual al numero de moles por unidad de volumen, generalmente moles por litros.
Reacciones Unimoleculares: Una reaccion en la cual, una sola molecula cambia a una o masmoleculas se llama reaccion unimolecular . Su ecuacion quımica es
A → B, o bien A → B + C + D + ...., (2.631)
donde A y B, representan a las sustancias. En este caso la ley de accion de masa esta dada por laecuacion diferencial
dCA
dt= −kCA, k > 0. (2.632)
Observemos que en (2.632) la velocidad es negativa, esto se debe a que la sustancia A decrece. Si arepresenta el numero de moles por litro de A inicialmente presentes y x es el numero de moles deA que cambian a productos en un tiempo t, entonces a− x sera la concentracion CA de A despuesde t minutos. De esta manera la ecuacion (2.632) tiene la forma
dx
dt= k(a− x) en t = 0, x = 0. (2.633)
De esta manera hemos obtenido la ecuacion diferencial, la cual modela en un alto grado de exactitudel problema de las reacciones unimoleculares.
Reacciones Bimoleculares: Una reaccion en la cual dos moleculas interactuan para dar lugara una o mas moleculas como productos, se llama reaccion bimolecular. La ecuacion quımica tiene laforma
A + B → C + D + ..., o bien 2A → B + C + D + ..., (2.634)
Para el primer caso, la ley de accion de masa se escribe como
dx
dt= k(a− x)(b− x), (2.635)
donde a y b son los numeros de moles iniciales por litro de A y B, y x es el numero de moles porlitro de A y B, respectivamente, despues de t minutos.
Si A = B (segunda ecuacion en (2.634)) , entonces (2.635) se reduce a
dx
dt= k(a− x)2. (2.636)
Problema 1:
Un vehıculo que viaja a una velocidad v0 apaga su motor, no estando ya sometido mas que auna fuerza de rozamiento proporcional a la velocidad. Como varıan su velocidad y su coordenada deposicion en funcion del tiempo?
Datos:
v0, Fr = αv, donde α es el coeficiente de proporcionalidad.
Hallar:

88 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
v = v(t), x = x(t).
Solucion:
De la segunda ley de Newton, y debido a que solo una fuerza influye en el cuerpo, tenemos
mdv
dt= −αv. (2.637)
El signo menos en la ecuacion (2.637), es debido a que la fuerza de rozamiento esta dirigida ensentido opuesto al movimiento. La ecuacion diferencial (2.637), es de primer orden respecto a v yademas es de variables separables. Separando las variables
dv
v= − α
mdt. (2.638)
Integrando ∫dv
v= − α
m
∫dt, (2.639)
tenemosln v = − α
mt+ ln c1. (2.640)
Aplicando las propiedades de los logaritmos ln v− ln c1 = ln(v/c1), esta misma expresion la podemosescribir como
v(t) = c1e− α
m t, (2.641)
donde c1 es una constante de integracion, la cual depende de las condiciones iniciales del problema.En nuestro caso, estas condiciones son; para t = 0, v = v0, entonces, sustituyendo en (2.641),obtenemos la expresion para la constante c1,
v0 = c1. (2.642)
Sustituyendo el valor obtenido c1 = v0 en la ecuacion (2.641), tenemos
v(t) = v0e− α
m t. (2.643)
Para hallar como cambia la coordenada con el tiempo, es decir, la ecuacion x = x(t), recordamosque la velocidad esta dada como v = dx
dt y sustituyendo en (2.643), obtenemos la ecuacion diferencialpara x = x(t), esto es
dx
dt= v0e
− αm t. (2.644)
Integrando ∫dx = v0
∫e−
αm tdt, (2.645)
resultax(t) = −mv0
αe−
αm t + c2. (2.646)
Podemos elegir las siguientes condiciones iniciales, para t = 0, x = 0,
0 = −mv0α
+ c2 → c2 =mv0α
. (2.647)
Sustituyendo en (2.646),x(t) = −mv0
αe−
αm t +
mv0α
. (2.648)

2.21. APLICACIONES 89
Finalmente, el resultado lo podemos escribir de la siguiente manera
x(t) =mv0α
(1− e−αm t). (2.649)
De este resultado podemos ver que cuando t → 0, x(t) → 0, lo cual concuerda con los datosiniciales. Para el caso en que t→∞, tenemos que x(t) → mv0
α , tiende a un valor constante.
Problema 2:
De una cierta altura h un cuerpo de masa m es arrojado verticalmente hacia abajo con unavelocidad inicial v0. Sabemos que la fuerza de rozamiento del aire es directamente proporcional ala velocidad instantanea. Calcular como cambia la velocidad y la altura del cuerpo en funcion deltiempo.
Datos:
m,h, v0 y Fr = αv.
Hallar:
v = v(t) y h = h(t)
Solucion:
En el cuerpo que cae actuan el peso mg y la fuerza de rozamiento que es proporcional a lavelocidad, esto es Fr = αv, donde α es el coeficiente de proporcionalidad. Entonces, de la segundaley de Newton, tenemos
mdv
dt= mg − αv. (2.650)
El movimiento es hacia abajo, es por eso que el termino mg es positivo, mientras que αv es negativo,ya que su direccion es opuesta al movimiento. La ecuacion (2.650), es de primer orden y puedeser resuelta de dos maneras; por el metodo de variables separables o como una ecuacion lineal nohomogenea. Analicemos el primer caso, es decir, por separacion de variables. Escribamos la ecuacionde la siguiente manera
dv
dt= g − α
mv → dv
dt= − α
m
(v − mg
α
)→
∫dv
v − mgα
= − α
mdt. (2.651)
Integrando la ecuacion (2.651), tenemos
ln∣∣∣v − mg
α
∣∣∣ = − α
mt+ c. (2.652)
La constante de integracion la podemos hallar de las condiciones del problema, en este caso; parat = 0 tenemos que v = v0, poniendo estas condiciones en (2.652), resulta
c = ln∣∣∣v0 − mg
α
∣∣∣. (2.653)
Sustituyendo el valor de c en (2.652), tenemos
ln∣∣∣v − mg
α
∣∣∣ = − α
mt+ ln
∣∣∣v0 − mg
α
∣∣∣. (2.654)
Esta expresion da el resultado buscado, sin embargo, usando las propiedades de los logaritmos lapodemos escribir de una forma mas elegante
ln∣∣∣ v − mg
α
v0 − mgα
∣∣∣ = − α
mt → v(t) =
mg
α+
(v0 −
mg
α
)e−
αm t. (2.655)

90 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Una vez obtenida la velocidad en funcion del tiempo, podemos hallar como cambia la altura h(t)con el tiempo. De la definicion de velocidad
v(t) → dh
dt=mg
α+
(v0 −
mg
α
)e−
αm t. (2.656)
Integrando esta ultima expresion, obtenemos∫dh =
∫ [mgα
+(v0 −
mg
α
)e−
αm t
]dt → h(t) =
mg
αt− m
α
(v0 −
mg
α
)e−
αm t + c2. (2.657)
En este problema hemos escogido nuestro sistema de referencia en el punto donde fue lanzado elcuerpo, es decir, en el tiempo t = 0 estabamos en la altura h0, poniendo las condiciones iniciales en(2.657), obtenemos el valor de c2,
c2 = h0 +m
α
(v0 −
mg
α
). (2.658)
Sustituyendo este valor en (2.657), finalmente tenemos
h(t) = h0 +mg
αt+
m
α
(v0 −
mg
α
)(1− e−
αm t
). (2.659)
Ahora vamos a resolver el mismo problema escribiendo la ecuacion (2.650), de la siguiente manera
dv
dt+α
mv = g. (2.660)
Esta ecuacion es lineal de primer orden no homogenea respecto a la velocidad v. Hagamos uso delfactor integrante para resolverla. En este caso la funcion P (t) = α/m, es constante, entonces, elfactor integrante
µ(t) = e∫
P (t)dt = eαm
∫dt = e
αm t. (2.661)
Recordemos que en la ecuacion (2.660), la variable independiente es el tiempo t y la funcion depen-diente es la velocidad v. Luego, tenemos
d(e
αm tv
)= ge
αm t →
∫d(e
αm tv
)= g
∫e
αm tdt. (2.662)
Integrando, obtenemos
veαm t =
gm
αe
αm t + c → v(t) =
gm
α+ ce−
αm t. (2.663)
De las condiciones iniciales t = 0, v = v0 hallamos la constante de integracion
c = v0 −mg
α. (2.664)
Sustituyendo el valor de c en (2.663), y acomodando terminos, obtenemos el resultado final
v(t) =mg
α+
(v0 −
mg
α
)e−
αm t. (2.665)
Como era de esperarse, obtenemos el mismo resultado. Hemos ilustrado dos metodos diferentes desolucion a un mismo problema con el objetivo de mostrarle a los estudiantes que no importa elmetodo elegido, el resultado siempre sera el mismo. Integrando la ecuacion (2.665), se puede obtenerla altura h(t), como se ilustro anteriormente.

2.21. APLICACIONES 91
Problema 3:
Un cuerpo de masa m se mueve a lo largo de una lınea recta. En el instante t = 0 esta sometidoa una fuerza F = F0. Esta fuerza decrece proporcionalmente con el tiempo, de modo que en uninstante posterior t = t1 es nula, no actuando ya ninguna fuerza sobre el cuerpo a partir de esteinstante. Suponga que la coordenada de posicion y la velocidad son nulas en el instante inicial. Hallarlos valores de estas magnitudes en el instante t = t1.
Datos:
t = 0, F = F0, t = t1
Hallar:
v = v(t1), x = x(t1).
Solucion:
De las condiciones del problema, tenemos que la fuerza que actua en el cuerpo es F = F0 − αt,donde α es el coeficiente de proporcionalidad. Entonces, de la segunda ley de Newton, tenemos laecuacion diferencial
mdv
dt= F0 − αt. (2.666)
Esta es una ecuacion de primer orden con variables separables. Separando las variables e integrando∫ v
0
dv =∫ t
0
(F0
m− α
mt)dt. (2.667)
Calculando las integrales, obtenemos
v(t) =F0
mt− α
2mt2. (2.668)
De las condiciones del problema, tenemos
0 = F0 − αt1 → F0 = αt1. (2.669)
Sustituyendo en la expresion (2.668),
v(t1) =α
mt21 −
α
2mt21. (2.670)
Finalmente, tenemosv(t1) =
α
2mt21. (2.671)
Para encontrar el camino recorrido usamos la definicion v = dxdt , y poniendo en (2.668), resulta
dx
dt=F0
mt− α
2mt2. (2.672)
Integrando ∫ x
0
dx =∫ t
0
(F0
mt− α
2mt2
)dt, (2.673)
tenemos
x(t) =F0
2mt2 − α
6mt3. (2.674)

92 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
De las condiciones del problema, tenemos que para t = t1, F0 = αt1. Sustituyendo en la ecuacion(2.674),
x(t1) =α
2mt31 −
α
6mt31. (2.675)
Finalmente, el resultado es
x(t1) =αt313m
. (2.676)
Problema 4:
Que velocidad adquiere una masa m, originalmente en reposo, sobre la cual actua una fuerzacuyo valor depende del tiempo segun la ley F (t) = Ae−α2t2 , (t > 0)?
Datos:
m, v0 = 0, F (t) = Ae−α2t2 .
Hallar:
v = v(t).
Solucion:
En el cuerpo solo actua una fuerza, de tal manera que usando la segunda ley de Newton tenemosla relacion
mdv
dt= Ae−α2t2 . (2.677)
Para encontrar la velocidad v debemos integrar la expresion (2.677),
m
∫ v
0
dv = A
∫ ∞
0
e−α2t2dt →∫ v
0
dv =A
m
∫ ∞
0
e−α2t2dt. (2.678)
La integral la vamos a evaluar desde su posicion inicial(reposo, v0 = 0, en el tiempo t = 0, hasta untiempo t > 0, segun las condiciones del problema). Entonces, tenemos que nada mas debe cumplirset > 0, sin ninguna otra restriccion. Podemos tomar a t lo suficientemente grande, esto es t → ∞.Entonces, calculemos la integral∫ ∞
0
e−α2t2dt →ξ → α2t2, dξ → 2α2tdt dt→ ξ−1/2
2αdξ
=
12α
∫ ∞
0
ξ−1/2e−ξdξ =12α
Γ(1
2
)=√π
2α. (2.679)
Luego, de (2.678), tenemos
v(t) =A√π
2αm. (2.680)
Para calcular la integral en (2.679), hemos utilizado la definicion de la funcion Gama, la cualesta definida como Γ(x) =
∫∞0tx−1e−tdt (ahora queda claro por que tomamos los lımites para
t, de 0 a ∞). Se puede demostrar que Γ(1/2) =√π. Como podemos ver, el cuerpo se mueve con una
velocidad constante y por lo tanto su posicion en funcion del tiempo es lineal
x(t) =A√π
2αmt. (2.681)
Esta expresion se obtiene integrando la ecuacion (2.680), respecto al tiempo, en este caso la constantede integracion no aparece, ya que por las condiciones iniciales, en t = 0, x = 0, la constante es cero.

2.21. APLICACIONES 93
Problema 5:
Un recipiente de area transversal S, la cual es una funcion conocida de la altura h, S = S(h),esta lleno de cierto lıquido hasta un nivel H. En el fondo del recipiente se tiene un orificio de areaσ, por el cual puede salir el lıquido. Se pide hallar el tiempo, t, en el cual el nivel del lıquido decrecede la posicion inicial H a cierta altura 0 ≤ h < H y el tiempo T que tarda en vaciarse por completoel recipiente.
Datos:
S = S(h), H, σ.
Hallar:
El tiempo t = t(h).
Solucion:
Supongamos que la altura del lıquido en el recipiente en un cierto tiempo t es igual a h(t). Lacantidad de lıquido ∆V , que sale del recipiente en el intervalo de tiempo de ∆t a t + ∆t, se puedecalcular como el volumen del cilindro con la superficie del fondo σ y altura h; v(h):
∆V∆t
= σv(h) → ∆V = σv(h)∆t. (2.682)
Este mismo volumen de lıquido puede ser calculado de otra forma. Debido al flujo del lıquido sunivel h en el recipiente decrece en −∆h, por consiguiente
∆V = −S(h)∆h. (2.683)
Igualando las dos expresiones (2.682), y (2.683), tenemos
−S(h)∆h = σv(h)∆t. (2.684)
Dividiendo las dos partes de esta ecuacion entre ∆t y tomando el lımite cuando ∆t→ 0, obtenemosla ecuacion diferencial
−S(h)dh
dt= σv(h), (2.685)
la cual describe la dependencia del nivel del lıquido h(t) en el recipiente respecto del tiempo t.
Luego, sustituyendo v(h), segun la ley de Torricelli v(h) = µ√
2gh, y separando las variables,obtenemos la siguiente ecuacion
dt = − S(h)σµ√
2ghdh. (2.686)
Integrando, obtenemos
t = − 1σµ√
2g
∫ h
H
S(x)√xdx =
1σµ√
2g
∫ H
h
S(x)√xdx. (2.687)
Si queremos saber el tiempo en que se vaciara el recipiente, es suficiente hacer h = 0, ası que, paraeste caso tenemos la relacion
T =1
σµ√
2g
∫ H
0
S(x)√xdx. (2.688)
Problema 6:

94 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Supongase que tenemos un deposito cilındrico lleno de agua con eje vertical, de diametro 2R yaltura H. En el fondo del deposito se tiene un orificio circular de diametro 2a. Necesitamos hallar eltiempo en que se vaciara el deposito.
Datos:
R, H, a.
Hallar:
El tiempo, T , que tarda en vaciarse el deposito.
Solucion:
El area de la seccion transversal S = S(h), en el caso dado es constante e igual a S = πR2, y elarea del orificio es σ = πa2. Hagamos uso del resultado anterior, es decir, de la expresion (2.688),
T =1
σµ√
2g
∫ H
0
S(x)√xdx =
πR2
πa2µ√
2g
∫ H
0
dh√h
=2R2
√H
a2µ√
2g. (2.689)
Problema 7:
Calcular el tiempo necesario para establecer iguales niveles de lıquido en dos recipientes conecta-dos. El orificio que conecta a los recipientes tiene un area σ. Las areas de las secciones transversaleshorizontales del primer y segundo recipiente son S1, y S2. En el momento inicial el nivel de lıquido enel primer recipiente se encontraba a una altura h1, del orificio, y el segundo a la altura h1, (h1 > h2).
Datos:
σ, S1, S2, h1, h2, (h1 > h2).
Hallar:
El tiempo T necesario para que los recipientes alcancen la nivelacion.
Solucion:
Supongamos que en un tiempo t, despues de comenzar la transicion del lıquido el nivel del aguaen el primer recipiente decrece a y1, y en el segundo recipiente aumenta en y2. En los siguientesincrementos infinitesimales de tiempo dt, en el primer recipiente el nivel de lıquido decrece en dy1(dy1 < 0), y en el segundo aumenta en dy2, (dy2 > 0). Debido a que el decremento en el volumen delıquido en el primer recipiente es igual al aumento en el segundo recipiente, entonces, tenemos
S1|dy1| = S2|dy2| → −S1dy1 = S2dy2. (2.690)
de dondedy2 = −S1
S2dy1. (2.691)
Introduciendo(diferencia de niveles)u = y1 − y2. (2.692)
Entonces, la velocidad de transicion de lıquido por el orificio entre los recipientes se puede hallarpor la formula de Torricelli, tenemos
v = µ√
2gu, (2.693)
en la cual se debe entender que el orificio se encuentra en la profundidad (2.692). Por eso el volumende lıquido que pasa en
dt = −S1dy1, (2.694)

2.21. APLICACIONES 95
y al mismo tiempo es igual avρdt = σµ
√2gudt. (2.695)
Igualando estas expresiones para un mismo volumen, tenemos
−S1dy1 = σµ√
2gudt. (2.696)
De las expresiones (2.691), y (2.692), tenemos
du = dy1 − dy2 = dy1 +S1
S2dy1 =
(S1 + S2
S2
)dy1. (2.697)
Despejando dy1, resulta
dy1 =S2
S1 + S2du. (2.698)
Sustituyendo esta expresion en (2.696), obtenemos la ecuacion diferencial que modela el problemaplanteado
− S1S2
S1 + S2du = σµ
√2gudt. (2.699)
Esta es una ecuacion diferencial con variables separables
dt = − S1S2
(S1 + S2)σµ√
2gdu√u. (2.700)
Integrando, tenemos
t = C − 2S1S2√u
(S1 + S2)σµ√
2g. (2.701)
De las condiciones, cuando t = 0, tenemos que u = h1 − h2, de donde
C =2S1S2
√(h1 − h2)
(S1 + S2)σµ√
2g. (2.702)
El tiempo T , necesario para que los niveles en los recipientes esten a la misma altura sera cuandou = 0. En tal caso, de la ecuacion (2.701), tenemos que T = C, entonces el resultado buscado es
T =2S1S2
√(h1 − h2)
(S1 + S2)σµ√
2g. (2.703)
Problema 8:
Un deposito cilındrico de volumen V0 esta lleno de aire atmosferico, que se comprime de unmodo adiabatico hasta que el volumen se hace igual a V1. Calcular el trabajo invertido durante lacompresion.
Datos:
V0, V1.
Hallar:
El trabajo A invertido durante la compresion.
Solucion:

96 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Podemos imaginar que en el recipiente el aire se comprime por un piston. Al bajar el piston unadistancia infinitesimal dx realiza un trabajo igual a
dA = −pSdx, (2.704)
donde p es la presion del aire antes de bajar el piston, S es el area de la seccion transversal delpiston. Luego, Sdx = dV es el cambio infinitesimal de volumen, por eso
dA = −pdV. (2.705)
Por otro lado, tenemos la ley de Poisson
p = p0
(V0
V
)k
, (2.706)
donde k es una constante para el gas dado. Sustituyendo la expresion (2.706) en (2.705), obtenemosla siguiente ecuacion diferencial
dA = −p0Vk0
dV
V k. (2.707)
Integrando ∫dA = −p0V
k0
∫dV
V k. (2.708)
Recordemos que p0 y V k0 son constantes dadas, por eso las podemos sacar del signo de la integral.
La integracion es facil y el resultado es
A = − p0Vk0
(−k + 1)V k−1+ c =
p0Vk0
(k − 1)V k−1+ c, k 6= 1, (2.709)
donde c es la constante de integracion, la cual definiremos segun las condiciones. Cuando el trabajoA = 0, el volumen es V = V0, entonces, tenemos que
c = − p0Vk0
(k − 1)V k−10
→ c = − p0V0
k − 1. (2.710)
Luego, sustituyendo este valor en (2.709), obtenemos
A =p0V
k0
(k − 1)V k−1− p0V0
k − 1→ A =
p0V0
k − 1
[(V0
V
)k−1
− 1]. (2.711)
De las condiciones del problema, el trabajo que debe realizarse para que V = V1, es
A =p0V0
k − 1
[(V0
V1
)k−1
− 1]. (2.712)
Problema 9:
Como resultado de una reaccion quımica entre dos substancias A y B se forma una tercera,C. Deseamos establecer la dependencia de la cantidad de substancia C respecto al tiempo, si enel momento de comenzar la reaccion la cantidad de substancia(masas) A y B eran iguales a a y b,respectivamente. De los datos experimentales, se sabe que la velocidad de la reaccion es proporcionalal producto de las masas en dicha reaccion.
Datos:
A, B, a, b y C

2.21. APLICACIONES 97
Hallar:
La dependencia de la cantidad de substancia C, respecto al tiempo t.
Solucion:
Sea x = x(t) la cantidad de substancia C en un tiempo t, despues de haber empezado la reaccion,y sea dx
dt , la rapidez con que se forma la substancia C. De los datos experimentales, tenemos
dx
dt≈ (a− x)(b− x) → dx
dt= α(a− x)(b− x). (2.713)
donde α representa el coeficiente de proporcionalidad. La ecuacion (2.713), es una ecuacion diferencialde primer orden con variables separables. Separando las variables, tenemos
dx
(a− x)(b− x)= αdt. (2.714)
Factorizando dos veces el signo menos, obtenemos la expresion equivalente
dx
(x− a)(x− b)= αdt. (2.715)
Para integrar, desarrollamos en fracciones parciales
1(x− a)(x− b)
=D
(x− a)+
E
(x− b). (2.716)
Usando el metodo de Heaviside, para hallar a D y E, obtenemos
D =1
(x− a)(x− b)
∣∣∣x→a
=1
a− b, E =
1(x− a)(x− b)
∣∣∣x→b
=1
b− a= − 1
a− b. (2.717)
De tal manera, que1
(x− a)(x− b)=
1(a− b)(x− a)
− 1(a− b)(x− b)
. (2.718)
Sustituyendo este resultado en (2.715), resulta
dx
(x− a)− dx
(x− b)= α(a− b)dt. (2.719)
Aplicando la integracion ∫dx
(x− a)−
∫dx
(x− b)= α(a− b)
∫dt, (2.720)
resultaln |x− a| − ln |x− b| = α(a− b)t+ lnc. (2.721)
Usando las propiedades de los logaritmos, esta ultima expresion la podemos escribir como
ln∣∣∣ x− a
c(x− b)
∣∣∣ = α(a− b)t. (2.722)
Luego,x− a
x− b= ceα(a−b)t. (2.723)

98 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
La constante c la podemos hallar de la condicion inicial del problema, para t = 0, x(t) = 0. Susti-tuyendo esta condicion en (2.723), tenemos
0− a
0− b= ceα(a−b)0 → c =
a
b(2.724)
Ahora, sustituyendo el valor obtenido de c en (2.723), finalmente, tenemos
x− a
x− b=a
beα(a−b)t. (2.725)
Esta misma expresion la podemos escribir como
x(t) = ab1− eα(b−a)t
b− aeα(b−a)t. (2.726)
Supongamos que b > a, entonces, x(t) → a, cuando t → ∞. Si, al contrario, b < a, entonces, ladependencia x = x(t), esta dada por la expresion
x(t) = abe−α(b−a)t − 1be−α(b−a)t − a
. (2.727)
Finalmente, x(t) → b, cuando t→∞. Por otro lado, si la cantidad de substancias A y B son iguales,es decir A = B, entonces, la ecuacion que describe la reaccion se reduce a
dx
dt= α(a− x)2. (2.728)
Separando las variables e integrando, tenemos∫dx
(a− x)2= αdt → 1
a− x= αt+ c1. (2.729)
De la condicion x(0) = 0, hallamos el valor de c1, resulta ser
c =1a. (2.730)
Sustituyendo el valor de c1 en la ecuacion (2.729), tenemos el siguiente resultado
1a− x
= αt+1a. (2.731)
Esta misma expresion la podemos escribir, finalmente, como
x(t) = a− a
1 + aαt= a
(1− 1
1 + aαt
). (2.732)
De este resultado se puede ver que x(t) → a, cuando t→∞.
Problema 10:
Supongamos que de la superficie de la Tierra lanzamos un cuerpo de masa m verticalmente haciaarriba con una velocidad inicial de v0. Queremos saber la altura maxima hmax a la que llegara elcuerpo y en que tiempo lo lograra. Vamos a suponer que la resistencia del aire es proporcional alpeso del cuerpo y al cuadrado de su velocidad.
Datos:

2.21. APLICACIONES 99
m, v0.
Hallar:
hmax y el tiempo t.
Problema 11:
Una bala se introduce en una tabla de espesor h con una velocidad v0 traspasandola con lavelocidad v1. Suponga que la resistencia de la tabla al movimiento de la bala es proporcional alcuadrado de la velocidad instantanea de la bala. Hallar el tiempo del movimiento de la bala por latabla.
Datos:
h, v0, v1.
Hallar:
El tiempo t necesario para atravesar la tabla.
Solucion:
Si suponemos que en la bala no actua la fuerza de gravedad (ya que la bala es muy pequena ysu velocidad es grande), entonces, en ella actuara solo la fuerza de rozamiento debida a la tabla. Delos datos, sabemos que esta fuerza es proporcional al cuadrado de la velocidad instantanea, esto es
Fr = −αv2, (2.733)
donde Fr indica la fuerza de rozamiento, el signo negativo es debido a que esta fuerza actua endireccion opuesta al movimiento. Ahora, aplicando la segunda ley de Newton, tenemos
mdv
dt= −αv2. (2.734)
Esta es una ecuacion diferencial de primer orden y de variables separables. Separando las variablesy aplicando la integracion ∫
dv
v2= − α
m
∫dt → −1
v= − α
mt+ c1. (2.735)
Sustituyendo las condiciones iniciales del problema, en t = 0, v = v0 para hallar c1,
− 1v0
= − α
m0 + c1 → c1 = − 1
v0. (2.736)
Poniendo el valor de c1 en la segunda expresion de (2.735), resulta
1v− 1v0
=α
mt. (2.737)
Despejando el tiempo t, obtenemos
t =m
α
(1v− 1v0
). (2.738)
Analizando el resultado obtenido para el tiempo t, nos damos cuenta que este no involucra el espesorh de la tabla ni la velocidad con que la bala sale de ella. Entonces, significa que aun no esta del todoresuelto el problema. Para resolverlo usamos la regla de la cadena para transformar la aceleraciondel cuerpo, a(t) = dv
dt = dvdh
dhdt = v dv
dh . La ecuacion (2.734), se transforma en
mdv
dh
dh
dt= −αv2 → m
dv
dhv = −αv2 → m
dv
dh= −αv. (2.739)

100 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
La tercer ecuacion en (2.739), es la ecuacion que debemos resolver. Separando las variables e inte-grando, obtenemos
dv
v= − α
mdh →
∫ v1
v0
dv
v= − α
m
∫ h
0
dh. (2.740)
Integrando, resultaln v
∣∣∣v1
v0
= − α
mh → α =
m
hln
(v0v1
). (2.741)
Sustituyendo el valor de α en la expresion (2.738), finalmente, obtenemos el resultado buscado
t =m
mh ln( v0
v1)
( 1v1− 1v0
)=
h
ln( v0v1
)
(v0 − v1v1v0
). (2.742)
En la expresion (2.738), hemos sustituido la velocidad v por v1, que es la velocidad con que la balasale de la tabla y debido a que nos interesa solo el tiempo en que tardo la bala en atravesarla.
Problema 12:
Un paracaidista desciende en un paracaıdas que tiene forma de semiesfera de radio R = 5m.La masa total (paracaidista + paracaıdas) es de m = 90kg. Hallar como varıa la velocidad con eltiempo. Considere que la fuerza de rozamiento debida al aire es F = 0, 00090Sv2, donde S es el areade la seccion transversal del paracaıdas.
Datos:
R, m, S y F .
Hallar:
Como varıa la velocidad con el tiempo.
Solucion:
Aplicando la segunda ley de Newton obtenemos la ecuacion diferencial
mdv
dt= mg − 0,00090Sv2 → dv
dt= g − βv2, (2.743)
donde β = 0, 00090S/m. Separando las variables, tenemos∫dv
g − βv2=
∫dt. (2.744)
Transformando el termino
1g − βv2
=1
β(g/β − v2), a2 = g/β → 1
β(a2 − v2)=
1β(a− v)(a+ v)
. (2.745)
Desarrollando en fracciones parciales la expresion
1(a− v)(a+ v)
=A
a− v+
B
a+ v. (2.746)
De donde obtenemosAa+Av +Ba−Bv = 1, (2.747)
Para que esta relacion se cumpla, las constantes A y B deberan satisfacer las ecuaciones
a(A+B) = 1,A−B = 0. (2.748)

2.21. APLICACIONES 101
Resolviendo este sistema de dos ecuaciones, obtenemos que B = 1/2a y A = 1/2a. Sustituyendo enla ultima ecuacion de (4.243), obtenemos
1β(a− v)(a+ v)
=1
2aβ(a− v)+
12aβ(a+ v)
. (2.749)
Entonces, la integral (4.242), se reduce a
12aβ
∫ ( 1a− v
+1
a+ v
)dv =
∫dt. (2.750)
Integrando, resulta
− 12aβ
ln |a− v|+ 12aβ
ln |a+ v| = t+ c. (2.751)
Podemos elegir las siguientes condiciones iniciales, para t = 0 la velocidad es v0 = 0, entonces, c = 0.Quedando solo la expresion
− 12aβ
ln |a− v|+ 12aβ
ln |a+ v| = t. (2.752)
Este mismo resultado lo podemos poner de la siguiente manera
12aβ
ln∣∣∣a+ v
a− v
∣∣∣ = t → a+ v
a− v= e2aβt. (2.753)
De esta ultima expresion es facil despejar a la velocidad v, obtenemos
v(t) = ae2aβt − 11 + e2aβt
. (2.754)
Multiplicando y dividiendo la parte derecha de (2.754), por e−aβt, resulta
v(t) = ae−aβte2aβt − e−aβt
e−aβt + e−aβte2aβt= a
eaβt − e−aβt
e−aβt + eaβt=
√g
β
senh(√gβt)
cosh(√gβt)
, (2.755)
donde hemos sustituido a2 = g/β y senh y cosh son las funciones seno y coseno hiperbolicos. Paraencontrar como cambia la altura con el tiempo recordemos que v = dh/dt, ası que debemos integrarla expresion (2.755),
dh
dt=
√g
β
senh(√gβt)
cosh(√gβt)
→∫dh =
√g
β
∫senh(
√gβt)
cosh(√gβt)
dt =√g
β
1√gβ
∫d(cosh
√gβt)
cosh(√gβt)
dt.
(2.756)La integracion es facil y resulta
h(t) =1β
ln[cosh(
√βgt)
]. (2.757)
Las ecuaciones (2.755), y (2.757), describen como varıan la velocidad v(t) y la altura h(t) del para-caidista en cada momento de tiempo t. Escribamos la ecuacion (2.757), de la siguiente manera
h(t) =1β
ln[e√βgt + e−
√βgt
2
]. (2.758)
El segundo sumando (el que tiene signo negativo en el exponencial) sera muy pequeno para ciertovalor de t, por eso, para valores mayores a cierto valor dado se puede, sin perder generalidad, escribirla ecuacion (2.758), como
h(t) =1β
ln(e√βgt
2
)=
1β
[ln e
√βgt − ln 2
]=
√g
βt− ln 2
β. (2.759)

102 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Como podemos observar, esta ecuacion representa una dependencia lineal respecto al tiempo. Estoquiere decir, que despues de un cierto tiempo, el paracaidista tiene un movimiento casi homogeneocon una velocidad constante, dada por v =
√g/β.
Problema 13:
La absorcion de un flujo luminoso por una capa delgada de agua es proporcional al grosor de lacapa y al flujo que incide en su superficie. Supongase que por la capa de grosor 1m se absorbe 1/4del flujo inicial. Que parte del flujo luminoso llegara a la profundidad h.
Datos:
Hallar:
Que parte del flujo luminoso llegara a la profundidad h
Solucion:
Sea Q = Q(h), el flujo luminoso que incide en la superficie y la penetra una profundidad h.Cuando el flujo atraviesa una capa de agua de grosor dh, el flujo absorbido dQ sera
dQ ≈ Qdh, dQ = −αQdh, (2.760)
donde α es el coeficiente de proporcionalidad. El signo menos en la ecuacion (2.760), es debido aque el flujo disminuye conforme este penetra en el agua. La ecuacion diferencial obtenida, (2.760),es facil de resolver. Separando variables e integrando∫
dQ
Q= −αdh → lnQ = −αh+ c. (2.761)
Supongamos que el flujo inicial es Q0. Entonces, para h = 0, tenemos Q(0) = Q0. Sustituyendo estacondicion inicial en (2.761), hallamos el valor de c,
lnQ0 = c. (2.762)
Poniendo el valor de c en (2.761), y usando las propiedades de los logaritmos
lnQ = −αh+ lnQ0 → ln( Q
Q0
)= −αh → Q(h) = Q0e
−αh. (2.763)
De las condiciones del problema, Q(1) = 34Q0, tenemos
34Q0 = Q0e
−α. (2.764)
De dondee−α =
34
→ eα =43. (2.765)
EntoncesQ(h) = Q0e
−h ln (4/3) = Q0eln(3/4)h
. (2.766)
El resultado final esQ(h) =
(34
)h
Q0. (2.767)
Problema 14:
Un cuerpo de masa m es lanzado de la superficie de la Tierra en un plano vertical con unavelocidad v0 formando un angulo α con el eje horizontal. Suponga que la fuerza de rozamiento del

2.21. APLICACIONES 103
aire es opuesta al movimiento del cuerpo y proporcional al producto de la masa del cuerpo y suvelocidad ~v, es decir, ~Fr = αm~v, donde α es la constante de proporcionalidad. Se pide hallar comocambian sus coordenadas respecto al tiempo.
Datos:
m, v0, α y ~Fr = βm~v.
Hallar:
Se pide hallar como cambian sus coordenadas respecto al tiempo.
Solucion:
Este problema lo vamos a resolver usando el sistema de coordenadas cartesianas, donde el origende este sistema coincide con el punto de donde fue lanzado el cuerpo. Para establecer las ecuacionesdiferenciales que describan el movimiento del cuerpo escojamos la posicion del cuerpo en un momentot, cuando las coordenadas del cuerpo x, y, z y sus primeras derivadas respecto a t tienen valorespositivos. En el cuerpo actuan dos fuerzas; su peso m~g dirigido verticalmente hacia abajo y la fuerzade rozamiento ~Fr, la cual tiene direccion opuesta al movimiento del cuerpo. La fuerza resultante es~F = m~g + ~Fr, entonces, aplicando la segunda ley de Newton
md~v
dt= ΣN
i~Fi → m
d~v
dt= m~g +mα~v, (2.768)
donde la fuerza de rozamiento es ~Fr = αm~v. Haciendo las proyecciones en los ejes x, y, z tenemos
Fx = −αmvx, Fy = −αmvy, Fz = −mg − αmvz, (2.769)
Luego, las ecuaciones de movimiento resultan de la segunda ley de Newton
mdvx
dt= −αmvx, m
dvy
dt= −αmvy, m
dvz
dt= −mg − αmvz. (2.770)
Estas ecuaciones diferenciales son con variables separables, y se pueden integrar independientementeuna de la otra. Eliminando la masa m de las ecuaciones (2.770),∫
dvx
vx= −α
∫dt,
∫dvy
vy= −α
∫dt,
∫dvz
vz + gα
= −α∫dt. (2.771)
Integrando, tenemos las soluciones
ln vx = −αt+ ln c1, ln vy = −αt+ ln c2, ln(vz +
g
α
)= −αt+ ln c3. (2.772)
Aplicando las propiedades de los logaritmos, tenemos las velocidades del cuerpo en funcion deltiempo t,
vx = c1e−αt, vy = c2e
−αt, vz = − gα
+ c3e−αt. (2.773)
Las condiciones iniciales segun como hemos elegido nuestras coordenadas, estaran dadas como
t = 0, x = 0, y = 0, vx = 0, vy = v0 cos θ, vz = v0 sen θ. (2.774)
Las constantes de integracion las encontramos sustituyendo las condiciones iniciales en (2.773),
c1 = 0, c2 = v0 cos θ, c3 =g
α+ v0 sen θ. (2.775)

104 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Sustituyendo los valores obtenidos de las constantes en (2.773), resulta
vx = 0, vy = v0 cos θe−αt, vz = − gα
+( gα
+ v0 sen θ)e−αt. (2.776)
Integramos una vez mas para obtener las posiciones del cuerpo como funciones del tiempo
x(t) =∫
0dt, y(t) = v0 cos θ∫e−αtdt, z(t) =
∫ [− g
α+
( gα
+ v0 sen θe−αt)]dt. (2.777)
Realizando la integracion, tenemos
x = c4, y(t) = − 1αv0 cos θe−αt + c5, z(t) = −gt
α− 1α
( gα
+ v0 sen θ)e−αt + c6. (2.778)
De las condiciones iniciales (2.774), obtenemos los valores de las constantes c4, c5 y c6
c4 = 0, c5 =v0 cos θα
, c6 =1α
( gα
+ v0 sen θ). (2.779)
Sustituyendo estos valores en (2.778), finalmente, tenemos
y(t) =v0 cos θα
(1− e−αt
),
z(t) = −gtα
+1α
( gα
+ v0 sen θ)(
1− e−αt), (2.780)
x(t) = 0.
Ahora veamos si nuestros resultados son correctos. Para esto, cuando α→ 0, las ecuaciones obtenidasdeberan reducirse a las ecuaciones para el caso en que no se toma en cuenta la fuerza de rozamientodel aire. Este es el bien conocido tiro parabolico. Entonces, en nuestras ecuaciones debemos hacerα→ 0. Para esto apliquemos la regla de Lopital
y1(t) = v0 cos θ lımα→0
1− e−αt
α= v0 cos θ lım
α→0
te−αt
1= v0t cos θ. (2.781)
Antes de tomar el lımite para la segunda ecuacion en (2.780), vamos a escribirla de forma tal quesea facil tomar el lımite, esto es
z1(t) =g(1− e−αt − αt)
α2+v0 sen θ(1− e−αt)
α. (2.782)
Ahora sı, apliquemos la regla de L’Hopital, tenemos
z1(t) = g lımα→0
(1− e−αt)′′α(α2)′′α
+ v0 sen θ lımα→0
(1− e−αt)′α(α)′α
= g lımα→0
−t2e−αt
2+ v0 sen θ lım
α→0
te−αt
1= −gt
2
2+ v0t sen θ. (2.783)
Conclusion, hemos obtenido las siguientes ecuaciones
x1(t) = 0,y1(t) = v0t cos θ, (2.784)
z1(t) = v0t sen θ −12gt2.
Estos resultados son bien conocidos, lo cual significa que nuestras suposiciones han sido correctas ylas ecuaciones (2.780), efectivamente son la solucion del problema planteado.

2.21. APLICACIONES 105
Problema 15:
Si la temperatura del aire es T = 200C y un cuerpo se enfrıa en t1 = 20min., desde T0 = 1000Chasta T1 = 600C. Cual sera el tiempo t2 para que su temperatura descienda hasta una temperaturaT2 = 300C.
Datos:
Del problema, podemos identificar la temperatura del medio(en este caso el medio es el aire)Tm = 200C, la temperatura inicial T0 = 1000C; t = 20min, 600C.
Hallar:
El tiempo t, para que el cuerpo alcance una temperatura de T2 = 300C.
Solucion:
Sustituyendo los datos del problema en la solucion general, obtenida en (2.440), tenemos
T (t) = 20 + (100− 20)e−αt = 20 + 80e−αt. (2.785)
Despues, debido a que la temperatura descendio a 600C en un tiempo t = 20min, poniendo estascondiciones en (2.785), hallaremos el valor de α, esto es
60 = 20 + 80e−α20 → 12
= e−20α → α =120
ln 2. (2.786)
Sustituyendo el valor de α en la ecuacion (2.785), tenemos
T (t) = 20 + 80e−(t/20) ln 2. (2.787)
Ahora, si queremos saber en que tiempo el cuerpo tendra la temperatura deseada T2 = 300C, essuficiente poner esta temperatura en (2.787), y despejar el tiempo t, esto es
30 = 20 + 80e−(t/20) ln 2 → 10 = 80(1
2
)t/20
. (2.788)
Finalmente, despejando t, tenemos t20 = 3,→ t = 60,min. Es decir, en 60,min el cuerpo tendra la
temperatura de 300C.
Problema 16:
Supongamos que se tiene un cilindro de radio R y de longitud L dentro del cual circula un lıquidocuyo coeficiente de viscosidad es µ. Se pide hallar la velocidad v del lıquido dentro del cilindro si ladiferencia de presiones en los extremos esta dada por (p1 − p2).
Datos:
Se conoce la diferencia de presiones, (p1 − p2).
Hallar:
La velocidad v del lıquido dentro del cilindro.
Solucion:
Para resolver el problema tomaremos una pequena porcion de lıquido en forma cilındrica, figura(2.8), de manera tal que el cilindro sea coaxial con un radio r. Debido a que el lıquido es viscoso, enla superficie del cilindro de radio r actuara una fuerza axial en sentido contrario al movimiento del

106 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 2.8: Cilindro de radio R y longitud L.
lıquido(resistencia debido a la viscosidad). Esta resistencia es proporcional al area de la superficie(2πrL), y al gradiente de la velocidad (dv/dr), es decir
Resistencia = −µ(2πrL)dv
dr. (2.789)
Si suponemos que la corriente es estacionaria(es decir, la velocidad no depende del tiempo), entonces,esta resistencia se equilibra con la diferencia de fuerzas en los extremos, es decir, con πr2(p1 − p2).Por consiguiente, obtenemos la ecuacion diferencial
−µ(2πrL)dv
dr= πr2(p1 − p2). (2.790)
De forma equivalente, podemos escribir
dv
dr= −p1 − p2
2µLr. (2.791)
Esta ecuacion es de variables separables. Separando variables e integrando∫dv = −p1 − p2
2µL
∫rdr, (2.792)
obtenemosv(r) = −p1 − p2
4µLr2 + c. (2.793)
Se ha demostrado, experimentalmente, que cuando r = R, entonces, v = 0. De esta manera, tenemoslas condiciones iniciales. Sustituyendo estas condiciones en (2.793), obtenemos el valor de la constante
c =p1 − p2
4µLR2. (2.794)
Sustituyendo el valor de c en (2.793), podemos escribir la solucion del problema como
v(r) =p1 − p2
4µL(R2 − r2). (2.795)
Luego, de esta solucion podemos calcular la cantidad de lıquido que sale del tubo. Para esto, veamosuna cara del cilindro, representada en la figura (2.9),
el area rayada esdA = 2πrdr. (2.796)

2.21. APLICACIONES 107
Figura 2.9: Cara del cilindro.
Entonces, la cantidad de lıquido dQ, que sale por esta area(rayada) sera
dQ = v(r)dA = v(r)2πrdr. (2.797)
Por consiguiente, el lıquido total que sale del tubo es
Q =∫ R
0
v(r)2πrdr =(p1 − p2)π
2µL
∫ R
0
(R2 − r2)rdr =(p1 − p2)π
2µL
(R2r2
2− r4
4
)∣∣∣R0
=(p1 − p2)π
8µLR4. (2.798)
A esta formula se le conoce como formula de Poiseuille.
Problema 17:
Se pide hallar la ecuacion de una cuerda, cuyos extremos estan fijos (esta forma es la que tomanlas cuerdas, cables y cadenas suspendidas).
Datos:
Una cuerda con los extremos fijos.
Hallar:
La ecuacion de la cuerda.
Solucion:
Sea A = (0, y0), el punto mınimo de la cuerda, figura (2.10), B y D los extremos de la misma.Tomemos el sistema de coordenadas cartesiano x, y, de tal manera, que el plano x, y este en el planode la cuerda, y ademas que el eje vertical pase por el punto A. Luego, sea P (x, y), un punto arbitrariosobre la cuerda. Consideremos la porcion AP , de la cuerda. Sobre esta porcion actuan las siguientesfuerzas:
El peso de la porcion AP , dirigido verticalmente hacia abajo
sρg, (2.799)
en donde, s = AP , ρ es la masa de la cuerda por unidad de longitud y g es la constante de lagravedad.

108 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Figura 2.10: Cuerda colgante.
La tension T0, en el punto A = (0, y0), que actua horizontalmente.
La tension ~T , que actua a lo largo de la tangente al punto P (x, y), y forma un angulo θ, conel eje x. La componente horizontal de ~T , es T cos θ, y la componente vertical es T sen θ.
Luego, debido a que la porcion AP es estatica, entonces, las tres fuerzas deben estar balanceadas,esto nos permite plantear las siguientes ecuaciones
T sen θ = sρg, T cos θ = T0. (2.800)
Despejando a T , de una de las ecuaciones en (2.800), y sustituyendo en la otra, tenemos
tg θ =sρg
T0. (2.801)
Por otro lado, si consideramos que la ecuacion de la cuerda esta dada por
y = y(x), (2.802)
entonces,
tg θ =dy
dx. (2.803)
Luego, igualando las expresiones (2.801), y (2.803), obtenemos la ecuacion diferencial
dy
dx=ρgs
T0. (2.804)
Ahora, derivamos esta expresion respecto a x, resulta
d2y
dx2=ρg
T0
ds
dx. (2.805)
Debido a que s es la longitud de una porcion de la cuerda AP , entonces, ds es el incrementoinfinitesimal de la longitud, por ello
(ds)2 = (dx)2 + (dy)2. (2.806)

2.21. APLICACIONES 109
Dividiendo la expresion (2.806), entre dx, resulta( dsdx
)2
= 1 +(dydx
)2
. (2.807)
Sustituyendo este resultado en la ecuacion (2.805), obtenemos la ecuacion diferencial
d2y
dx2=ρg
T0
√1 +
(dydx
)2
. (2.808)
El problema planteado esta parcialmente resuelto, nos queda por resolver la ecuacion diferencial(2.808), para saber que forma tendra la solucion de la ecuacion. Esta ecuacion se resuelve introducien-do el parametro p = dy/dx, como se vio anteriormente en el capıtulo de ecuaciones diferenciales noresueltas respecto a la derivada. Demostrar que la solucion de la ecuacion (2.808), es
y =12α
(c1e
αx +1c1e−αx
)+ c2, (2.809)
donde, c1 y c2 son constantes de integracion y por comodidad escribimos
α = ρg/T0. (2.810)
Luego, tomando en cuenta que A es el punto mınimo y que ademas, en este punto (x = 0), entonces
dy
dx= 0, (2.811)
yc1 = ±1. (2.812)
Reemplazando este resultado en (2.809), tenemos
y(x) =12α
(eαx + e−αx
)+ c2 → y(x) =
1α
cosh (αx) + c2. (2.813)
Esta ecuacion describe una curva llamada catenaria y es la solucion de la ecuacion de una cuerdasujeta en los extremos.
Problema 18:
La aceleracion de una locomotora es directamente proporcional a la fuerza de traccion (arrastre)F e inversamente proporcional a la masa m del tren. La fuerza de traccion de la locomotora esF (t) = b−kv(t), donde v(t) es la velocidad de la locomotora en el tiempo t, b y k son constantes. Sepide hallar la dependencia de la fuerza de traccion de la locomotora respecto al tiempo t. Suponga,que la locomotora tenıa una velocidad inicial v0.
Datos: F (t) = b− kv(t), v0, m, k.
Hallar:
La dependencia de la fuerza de traccion de la locomotora respecto al tiempo t.
Solucion:
De la segunda ley de Newton, tenemos la ecuacion
mdv
dt= b− kv →
∫dv
kv − b= − 1
m
∫dt. (2.814)

110 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Resolviendo las integrales, resulta
ln(kv − b
c
)= − k
mt. (2.815)
Tomando el logaritmo inverso, obtenemos la ecuacion
v(t) =b
k+c
ke−
km t. (2.816)
De las condiciones iniciales del problema t = 0, v = v0, obtenemos el valor de la constante, esto es
v0 =b
k+c
k→ c = kv0 − b. (2.817)
Sustituyendo este resultado en (2.816), obtenemos
v(t) =b
k+
(v0 −
b
k
)e−
km t. (2.818)
Luego, la dependencia de la fuerza de traccion de la locomotora con el tiempo esta dada por laexpresion
F (t) = b− kv(t). (2.819)
Sustituyendo el valor de (2.818) en (2.819), obtenemos, finalmente
F (t) =(b− kv0
)e−
km t. (2.820)
Este es el resultado buscado.
Problema 19:
Un meteorito que se encuentra bajo la accion de la gravedad Terrestre, de su estado de reposoempieza a caer a la Tierra con movimiento rectilıneo desde una altura h. Cual sera la velocidad delmeteorito al llegar a la superficie de la Tierra, si despreciamos la atmosfera terrestre? El radio de laTierra es R = 6377km.
Datos: R = 6377, km, g = 9,81m/s, h.
Hallar: La velocidad al llegar a la superficie de la Tierra.
Solucion:
Sea x = x(t), la distancia recorrida por el meteorito en el momento de descenso, h−x la distanciadel meteorito, en el momento t, hasta el centro de la Tierra. En el momento t, en el meteorito actuanla fuerza F = ma, donde m es la masa del meteorito y a su aceleracion. En la superficie de la Tierraen el meteorito actuan la fuerza de gravedad P = mg, donde g es la aceleracion de caıda libre en lasuperficie de la Tierra.
Segun la ley de Newton, estas fuerzas son inversamente proporcionales al cuadrado de la distanciadel cuerpo en caıda al centro de la Tierra, esto es
F
P=
R2
(h− x)2→ ma
mg=
R2
(h− x)2. (2.821)
De donde, tenemos
a =R2g
(h− x)2. (2.822)

2.21. APLICACIONES 111
Por otro lado, tenemos que a = dvdt , entonces
dv
dt=
R2
(h− x)2. (2.823)
Haciendo uso de la regla de la cadena
dc
dt=dv
dx
dx
dt= v
dv
dx. (2.824)
Obtenemos la ecuacion diferencial
vdv
dx=
gR2
(h− x)2→ dv2
dx=
2gR2
(h− x)2. (2.825)
Integrando ∫dv2 = 2gR2
∫dx
(h− x)2, (2.826)
resulta
v2 =2gR2
h− x+ c. (2.827)
Debido a que el movimiento empezo del reposo, tenemos las condiciones iniciales es decir, cuandot = 0, x0 = 0 y v0 = 0, sustituyendo estos valores en (2.827), resulta
0 =2gr2
h− 0+ c → c = −2gR2
h. (2.828)
Sustituyendo el valor de c en la ecuacion (2.828), obtenemos la variacion de la velocidad v delmeteorito respecto a la distancia recorrida x, esta tiene la forma
v2(x) =2gR2x
h(h− x). (2.829)
En la superficie de la Tierra (cuando x = h−R), la velocidad del meteorito es
v =
√2gR
(1− R
h
). (2.830)
Debido a que h por condicion no se restringe mucho, entonces, pasando al lımite cuando h → ∞,obtenemos
v =√
2gR. (2.831)
Cuando el meteorito llega a la superficie de la Tierra, este tiene una velocidad
v =√
(2)(9, 81)(6377000) ≈ 11, 2km/s. (2.832)
Problema 20:
Un punto material de masa m se mueve a lo largo del eje 0x. El trabajo realizado por la fuerzaque actua en el punto es proporcional al tiempo t, desde el comienzo del movimiento (el coeficientede proporcionalidad es k). Hallar la ley de movimiento del punto si en el momento t = 0 este seencontraba en reposo a una distancia s0 del orıgen.
Datos: m,A = kt, A representa el trabajo.
Hallar: la ley de movimiento del punto material.

112 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Solucion:
En el caso de un desplazamiento rectilıneo del punto, cuando la direccion de la fuerza y lavelocidad coinciden, el trabajo de la fuerza que actua en el punto es F (s), viene dado por la formula
A =∫ s
s0
F (x)dx. (2.833)
Por otro lado, de las condiciones del problema, tenemos A = kt, entonces, igualando estos trabajos,obtenemos
kt =∫ s
s0
F (x)dx → dA
dx= F (x). (2.834)
Luego, haciendo uso de la regla de la cadena
dA
dt
dt
dx= F (x) → F (x) =
k
v. (2.835)
Luego, de la segunda ley de Newton, tenemos la ecuacion diferencial
mvdv
dt= k → m
∫vdv = k
∫dt. (2.836)
Al integrar la ultima expresion, resulta
mv2
2= kt+ c. (2.837)
De las condiciones iniciales v(0) = 0, hallamos que c = 0, por esto, la solucion es
v(t) =
√2kmt. (2.838)
Luego, v = dxdt , entonces
dx
dt=
√2kmt →
∫dx =
√2km
∫t1/2dt. (2.839)
Integrando, resulta
x(t) =23
√2kmt3/2 + c2. (2.840)
De las condiciones iniciales, t = 0 s = s0, obtenemos
x(t) = s0 +23
(√2km
)t3/2. (2.841)
Problema 21:
Supongamos que tenemos una bobina de forma cilındrica hecha con alambre de cobre. Sabemosque al pasar una corriente electrica por la bobina se libera algo de calor, debido a la resistencia delmaterial al paso de la corriente. Queremos deducir una formula para la temperatura T = T (t) comofuncion del tiempo.
Datos: bobina de cobre cilındrica.
Hallar: T = T (t).

2.21. APLICACIONES 113
Solucion:
Sea T0 la temperatura del medio en el cual se encuentra la bobina, T (0) = T0, c representa elcalor especıfico del cobre, γ su densidad, V el volumen, S es el area de la superficie de la bobina, qla cantidad de calor liberado por unidad de tiempo y k es el coeficiente de conductividad del calor.
La cantidad de calor liberado en el tiempo ∆t sera igual a q∆t. Esta cantidad de calor se componede dos partes; el calor que sirve para aumentar la temperatura ∆T de la bobina, y el calor que emiteal medio que rodea a la bobina.
La primera parte es igual a cV γ∆T y la segunda parte es kS(T−T0)∆T (la cantidad de este calores proporcional a la diferencia de temperatura T y T0, de la bobina y el medio, y a las magnitudesS y ∆T ). Entonces, la cantidad de calor q liberado en el tiempo ∆t sera
q∆t = cV γ∆T + kS(T − T0)∆t. (2.842)
Dividiendo las dos partes de la ecuacion (2.842) entre ∆t y tomando el lımite cuando ∆t → 0,obtenemos la ecuacion diferencial
q = cV γdT
dt+ k(T − T0) → dT
dt= −α(T − T0) + β, donde α =
kS
cV γ, β =
q
cV γ. (2.843)
Integrando ∫dT(
(T − T0) + βα
) = −α∫dt, (2.844)
resulta
ln∣∣∣T − T0 +
β
γ
∣∣∣ = −αt+ ln c. (2.845)
Esta expresion la podemos escribir de la siguiente manera
T (t) = ce−αt + T0 −β
α. (2.846)
De las condiciones iniciales, cuando T (0) = T0, obtenemos el valor de c,
T0 = c+ T0 −β
α→ c =
β
α. (2.847)
Sustituyendo este valor en (2.846), obtenemos
T (t) =β
αe−αt + T0 −
β
α. (2.848)
Acomodando terminos resulta
T (t) = T0 +β
α
(1− e−αt
). (2.849)
Tomando en cuenta los valores de α y β en (2.843) el resultado final es
T (t) = T0 +q
kS
(1− e−
kScV γ t
). (2.850)
De este resultado podemos ver que cuando t → 0, entonces T (t) → T0 y cuando t → ∞, T (t) →T0 + q
kS .
Problema 22:

114 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
Supongamos que por un tubo recto de radio R fluye un lıduido y que la velocidad v de flujo decada capa del lıquido aumenta al acercarse al centro del tubo (eje del cilindro). Hallar la velocidadv, de la correspondiente capa, como funcion de la distancia r respecto al centro del cilindro.
Datos: R, v, r.
Hallar: v = v(r).
Solucion:
De la hidrodinamica sabemos que la dependencia entre v y r esta dada por la ecuacion
dv = −γi2εrdr, (2.851)
donde ε-es el coeficiente de viscosidad, i-es el decrecimiento hidraulico y γ-es la densidad del lıquido.El signo menos es debido a que con el aumento de la distancia r la velocidad del flujo decae.
Integrando la ecuacion (2.851), ∫dv = −γi
2ε
∫rdr, (2.852)
obtenemosv(r) = −γi
4εr2 + c. (2.853)
Para calcular el valor de la constante c consideramos que la velocidad de flujo de una capa de lıquidoes cero cuando es adyacente al tubo, es decir, v(R) = 0. Entonces
v(R) = −γi4εr2 + c = 0 → c =
γi
4εR2. (2.854)
Sustituyendo el valor de c en (2.853), obtenemos el resultado final
v(r) =γi
4ε
(R2 − r2
). (2.855)

2.22. PROBLEMAS DE REPASO DEL CAPITULO 2: 115
2.22. Problemas de Repaso delCapıtulo 2:
Es importante que el estudiante resuelva to-dos los ejercicios que aquı se enuncian, ya quesolo de esta manera podra sentirse seguro en laaplicacion de uno u otro metodo. Al principio di-vidimos los problemas segun el metodo, al finaldamos una serie de ejercicios sin dar a conocerpor cual metodo se debe resolver. Esto es con elfin de que el estudiante analice la ecuacion y de-spues haga uso del metodo apropiado.
2.1.-) Resolver los siguientes problemas:
1. Un cuerpo de masa m inicia su movimientorectilıneo a lo largo del eje x, sin velocidadinicial, a partir de la posicion x = β haciael orıgen de coordenadas, bajo la accion dela fuerza de atraccion que varıa segun la ley
Fa =α
x2.
Se pide hallar el tiempo en que el cuerpose halla en la posicion x1 = β/2. Hallar lavelocidad del cuerpo en esta posicion.
2. Hallar la curva para la cual, la pendiente dela tangente en cualquier punto es n vecesmayor que la pendiente de la recta que uneeste punto con el orıgen de coordenadas.
3. Hallar las trayectorias ortogonales de la fa-milia de rectas y = kx
4. Hallar la ecuacion de la familia de las curvasque son ortogonales a la familia x2 + y2 =2ax.
5. Hallar las trayectorias ortogonales de la fa-milia de parabolas y = ax2.
6. Sopongase que una partıcula de masa my carga e posee una velocidad inicial v0y en el momento t = 0, entra en una re-gion donde hay un campo electrico de in-tensidad E = A cosωt, donde A y ω sonciertas constantes. Encontrar la ecuacion demovimiento x = x(t), la velocidad maximay mınima que alcanza la partıcula.
7. Hallar una curva que pase (0,−2), de ma-nera que la pendiente en cualquiera de suspuntos sea igual a la ordenada del mismopunto, aumentada tres veces.
8. Determinar la dependencia temporal de lacoordenada de posicion x = x(t), y de la ve-locidad v = v(t), de un cuerpo que describeun movimiento rectilıneo bajo la accion deuna fuerza que es proporcional a la masa ya la raız cuadrada de la velocidad del cuer-po.
9. Sobre una partıcula puntual libre de masam actua una fuerza F (t) = F0 sen(ωt). Hal-lar como cambia la distancia con el tiempo.
10. Un tanque hemisferico tiene un radio maxi-mo r y en el tiempo t = 0 esta lleno de agua.En ese momento se abre un agujero circu-lar de diametro d en el fondo del tanque.Se pide hallar el tiempo necesario en que eltanque se vaciara por completo.
11. El movimiento de un cuerpo de masa m esrectilıneo. La distancia recorrida en funcionde la velocidad esta dada por; x = α
√v−β.
Necesitamos hallar el tiempo en el cual lavelocidad se duplica.
12. Construir las ecuaciones diferenciales de lassiguientes familias de curvas:
a).- y = (c1 + c2x)ex + c3e−x.
b).- y = e−x(c1 cosx+ c2 senx).
c).- y = c1ec2x.
d).- y = ax .
e).- x2 − y2 = ax.
f).- y = aexa .
g).- y = ex(ax+ b).
h).- y2 = 2cx+ c2.
i).- y = ax2 + bx+ c.
j).- (x− a)2 + (y − b)2 = 1.
13. Hallar las trayectorias ortogonales de lassiguientes familias de curvas:
a).- y2 + 3x2 − 2ax = 0.
b).- x2 − y2 = a2.
c).- y2 + 2ax = a2.

116 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
d).- y2 = 4(x− a).
e).- y2 + 2ax = a2.
f).- y = axn.
g).- x2 + y2 = 2ay.
h).- x2 − 13y
2 = a2.
i).- x2 + 12y
2 = a2.
2.2.-) Ecuaciones Diferenciales con Vari-ables Separables
1. x dydx = 1−x2
y .
2. y2 dydx = 1− 2x.
3. x dydx + y = y2.
4. (xy2 + x)dx+ (y − x2y)dy = 0.
5. tg x dydx = y + a.
6. dydx = 10x+y.
7. dydx = yex
1+y2 .
8. y′ cosx = y ln y, y(0) = 1.
9. ln(cos y)dx+ x(tg y)dy = 0.
10. yx
dydx + ey = 0; y(1) = 0.
11. 3ex(tg y)dx+ (1 + ex)(sec2 y)dy = 0;y(0) = π/4.
12. e1+x2(tg y)dx = e2x
x−1dy; y(1) = π/4.
13. (1 + e2x)y2dy − exdx = 0.
14. dydx = x2+1
y4+3y .
15. dydx = 2x−y.
16. y ln3 y +√x+ 1 dy
dx = 0.
17. y dxdy = ln y; y(2) = 1.
18. x√
1 + y2dx+ y√
1 + x2dy = 0.
19. dydx = x2
y+x3y , y(0) = −2.
20. y dydx + 2x sec y = 0.
21. dydx =
√(a2−y2)(a2−x2) .
22. y(y + 2)dx+ x(y − 1)dy = 0; y(1) = 1.
23. x(y6 + 1)dx+ y2(x4 + 1)dy = 0.
24. (√xy −
√x)dx+ (
√xy +
√y)dy = 0.
25.√y2 + 1dx− xydy = 0.
26. (x2 − 1) dydx + 2xy2 = 0.
27. dydx + 2 senx = x3; y(0) = 3.
28. (x+ 2xy) dydx = 1; y(0) = −1.
29. dydx = x
x2y+y .
30. dydx − x2y − 1 = y + x2.
2.3.-) Ecuaciones Diferenciales Homogeneas
1. x sen ( yx ) dy
dx + x = y sen ( yx ).
2. (x+ 2y)dx = xdy.
3. xy + y2 − (2x2 + xy) dydx = 0.
4. (y2 − 2xy)dx+ x2dy = 0.
5. dydx −
yx = cos ( y
x ).
6. dydx − 4 = y
x + ( yx )2; y(1) = 2.
7. (x2 + y2)dx− xydy = 0.
8. x dydx − 2(y −√xy) = 0.
9. x ln ( yx ) dy
dx − x = y ln ( yx ).
10. 2x3 dydx = y(2x2 − y2).
11. xy dydx − y2 − 2x2y′ = 0.
12. x dydx =
√x2 − y2 + y.
13. x dydx = y + x tg ( y
x ); y(1) = π/2.
2.4.-)Ecuaciones Diferenciales Reduciblesa Homogeneas
1. (3x+ 3y − 1)dx+ 2(x+ y)dy = 0.
2. (2x+ y − 1)dx+ (x− 2y + 3)dy = 0.
3. (x+ y− 2)dx = (y−x− 4)dy; y(1) = 1
4. dydx = 4x6−y4
2x4y .

2.22. PROBLEMAS DE REPASO DEL CAPITULO 2: 117
5. dydx =
(4y+4
x+y−1
)2
.
6. dydx = y3+xy
2x2 .
7. ( dydx + 1) ln
(y+xx+3
)= y+x
x+3 .
8. 23xy
dydx =
√x6 − y4 + y2.
2.5.-) Ecuaciones Diferenciales en DerivadasTotales
1. (x+ sen y)dx+ (x cos y + sen y)dy = 0.
2. 2xydx+ (x2 − y2)dy = 0.
3. (y + ex sen y)dx+ (x+ ex cos y)dy = 0.
4. yxdx+ (y3 + lnx)dy = 0.
5. (xy + sen y)dx+ ( 12x
2 + x cos y)dy = 0.
6. 2x(1 +√x2 − y)dx−
√x2 − ydy = 0.
7. (x2 + y2 + y)dx+ (2xy + x+ ey)dy = 0.
8. 3x2(1 + ln y)dx− (2y − x3
y )dy = 0.
9. y = x( dydx − x cosx).
10. (2xyex2+ ln y)dx+
(ex2
+ xy
)dy = 0.
11. [sen y + (1 − y) cosx]dx + [(1 + x) cos y −senx]dy = 0.
12. (y + x ln y)dx+(
x2
2y + x+ 1)dy = 0.
13. (x2 + sen y)dx+ (1 + x cos y)dy = 0.
14. yexdx+ (y + ex)dy = 0.
15. (ex sen y + x)dx+ (ex cos y + y)dy = 0.
16. (3x2y + senx)dx+ (x3 − cos y)dy = 0.
17. (ex+y + 3x2)dx+ (ex+y + 4y3)dy = 0.
18. ydx− xdy + lnxdx = 0.
19. (x2 cosx− y)dx+ xdy = 0.
20. ydx− (x+ y2)dy = 0.
2.6.-) Ecuaciones Diferenciales Lineales
1. x dydx − 2y = 2x4.
2. dydx + 2xy = xe−x2
.
3. cosx dydx + y = 1− senx.
4. (xy + ex)dx = xdy.
5. dydx + n
xy = axn ; y(1) = 0.
6. (1 + x2) dydx − 2xy = (1 + x2)2.
7. 2ydx+ (y2 − 6x)dy = 0.
8. (2y ln y + y − x) dydx = y.
9. dydx −
1x ln xy = x lnx; y(e) = e2/2.
10. senx dydx − y cosx = 1; y(π/2) = 0.
11. dydx = y
x+y2 .
12. dydx + 3y(tg 3x) = sen 6x; y(0) = 1/3.
13. (2xy + 3)dy − y2dx = 0.
14. (y4 + 2x) dydx = y.
15. dydx + xy
1−x2 = 0.
16. y = x dydx + dy
dx ln y.
2.7.-) Ecuaciones Diferenciales deBernoulli
1. 2 dydx −
xy = xy
x2−1 .
2. dydx + 3x2y
x3+1 = y2(x3 +1) senx; y(0) = 1.
3. (2x2y ln y − x) dydx = y.
4. ydx+ (x+ x2y2)dy = 0.
5. (x2 ln y − x) dydx = y.
6. x3 sen y dydx = x dy
dx − 2y.
7. dydx + y
x − y4x2 = 0.
8. dydx −
2xyx2+1 −
4√
y√x2+1
arctanx = 0.
9. (x2 ln y − x) dydx = y.
10. dydx + 2y
x − 3x2y4/3 = 0.
11. dydx −
yx−1 −
y2
x−1 = 0.

118 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN
12. dydx + 2y
x − 2√
y
cos 2x = 0.
13. 4x dydx + 3y + exx4y5 = 0.
14. dydx + y = ex/2√y, y(0) = 9/4.
15. dydx + 3x2y
x3+1 = y2(x3 + 1) senx, y(0) = 1.
16. ydx+ [x+ (xy)2]dy = 0.
2.8.-) Ecuaciones no Resueltas Respec-to a la Derivada.
1. x = (y′)3 + y′.
2. x[(y′)2 − 1] = 2y′.
3. x = y′√
(y′)2 + 1.
4. y′(x− ln y′) = 1.
5. y = (y′ − 1)ey′ .
6. (y′)4 = 2yy′ + y2.
7. (y′)2 − 2xy′ = x2 − 4y.
8. x2(y′)2 = xyy′ + 1.
9. 2xy′ − y = y′ ln yy′.
10. y = 2xy′ + y2(y′)3.
2.9.-) Resolver las Siguientes Ecuacionesde Lagrange y Clairaut.
1. y = xy′ − (y′)2.
2. y = 2xy′ − 4(y′)3.
3. (y′)3 = 3(xy′ − y).
4. xy′ − y = ln y′.
5. xy′(y′ + 2) = y.
6. y + xy′ = 4√y′.
7. y = xy′ − (2 + y′).
8. y = x(y′)2 − 2(y′)3.
9. 2(y′)2(y − xy′) = 1.
10. 2xy′ − y = ln y′.
2.10.-) Diferentes Tipos de EcuacionesDiferenciales
1. y′ + y cosx = 0.
2. (1 + x2)y′ + xy = (1 + x2)5/2.
3. y′ + xy1+x2 = 1 + 2x3y
1+x4 .
4. y′ = 2xy3x2−y2 .
5. y′ − 2xy = x, y(0) = 1.
6. yy′ + (1 + y2) senx = 0, y(0) = 1.
7. (1 + x2)y′ + 4xy = x, y(1) = 14 .
8. (1 + ex)yy′ = ex, y(0) = 1.
9. (2x+ 2y − 4)y′ + (4x+ 4y − 2) = 0.
10. y′ + 1xy = x3y3.
11. 4xy2 + (3x2y − 1)y′ = 0.
12. (3x− 7y − 3)y′ = 3y − 7x+ 7.
13. y′ = ax+y.
14. y′ + x2y = 0.
15. y′ = 3x2
x3+y+1 .
16. y′ senx− y cosx = − sen2 xx2 .
17. (y4 − 3x2)y′ = −xy.
18. x2y′ + 2x3y = y2(1 + 2x2).
19. (x+ y)(y′ + 1) = y′.
20. y′ = 1x sen y+2 sen 2y .
21. (x− 2y − 1) = (6y − 3x− 2)y′.
22. y′ + x sen 2y = xe−x2cos2 y.
23. (x− y + 3) + (3x+ y + 1)y′.
24. (1 + ex/y) + ex/y(1− xy )y′ = 0, y(1) = 1.
25. (x− y2) + 2xyy′ = 0.
26. (xy + x2y3)y′ = 1.
27. y′ − y tg x = secx, y(0) = 0.
28. 3x2 − 2x− y = (x− 2y − 3y2)y′.

2.22. PROBLEMAS DE REPASO DEL CAPITULO 2: 119
29. dydx = − y
x + 2.
30. xy y
′ = 1−ln 2y
(ln y)√
3−ln 2x.
31. (y + 1)amxbnxdx = y3dy.
32. y√y + 1dx = (1 +
√x+ 1)dy.
33. y′ = xy(y − 1)3x.
34. (1 + y2)dx+ (1 + x2)dy = 0.
35. (y2 + xy2)y′ + x2 − yx2 = 0.
36. (1 + y2)dx = xdy.
37. x√
1− y2dx+ y√
1− x2dy = 0, y|x=0 = 1.
38. y ln ydx+ xdy = 0, y|x=1 = 1.
39. y′ = ax+y.
40. ey(1 + x2)dy − 2x(1 + ey)dx = 0.
41. (1 + ex)yy′ = ey, y|x=0 = 0.
42. y′ = sen (x− y).
43. (x2 + 1)(y2 + 1)dy = xydx.
44. r dvdr = v2 + 1.
45. dydx = ex+y.
46. dydx =
√xy.
47. dydx = ln (xy).
48. y dydx + 2 = ex + dy
dx .
49. dudv = sen u
cos u .
50. y dydt = ey2−2t.
51. (x+ y)2y′ = a2.
52. (1− y)eyy′ + y2
x ln x = 0.
53. xy2(xy′ + y) = a2.
54. (x− y)dx+ (x+ y)dy = 0.
55. xy′ = y cos[ln( yx )].
56. (y +√xy)dx = xdy.
57. (2x− 4y + 6)dx+ (x+ y − 3)dy = 0.
58. (2x+ y + 1)dx− (4x+ 2y − 3)dy = 0.
59. x− y − 1 + (y − x+ 2)y′ = 0.
60. (x+ 4y)y′ = 2x+ 3y − 5.
61. (y + 2)dx = (2x+ y − 4)dy.
62. x3(y′ − x) = y2.
63. y′ = y+2x+1 + tg y−2x
x+1 .
64. 2xdy + (x2y4 + 1)ydx = 0.
65. 2y′ + x = 4√y.
66. y′ = y2 − 2x2 .
67. 2xy′ + y = y2√x− x2y2.
68. 2y + (x2y + 1)xy′ = 0.
69. (2x+ 1)y′ = 4x+ 2y.
70. y′ + y tg x = secx.
71. x2y′ + xy + 1 = 0.
72. 2x(x2 + y)dx = dy.
73. (xy′ − 1) lnx = 2y.
74. xy′ + (x+ 1)y = 3x2e−x.
75. (2ey − x)y′ = 1.
76. dydx − y = −3e−x :
77. dydx −
2xx2+1y = 2
x2+1 .
78. dydx + y
x+1 = 2, y(0) = 3.
79. dydx −
2xy = 2x2, y(−2) = 4.
80. dydx + y = x2.

120 CAPITULO 2. ECUACIONES DIFERENCIALES DE PRIMER ORDEN

Capıtulo 3
ECUACIONES DIFERENCIALESDE ORDEN SUPERIOR
Simbolicamente, una ecuacion diferencial de n-esimo orden se puede escribir de la siguientemanera
F (x, y, y′, y′′, ..., y(n)) = 0 (3.1)
Si suponemos que esta ecuacion es resuelta respecto a su derivada de mas alto orden, entonces
y(n) = f(x, y, y′, y′′, ..., y(n−1)) (3.2)
En este capıtulo analizaremos solo aquellas ecuaciones que se resuelven respecto a la derivada de masalto orden. Para tales ecuaciones tiene lugar el siguiente teorema, el cual nos asegura la existencia yunicidad de las soluciones de la ecuacion (3.2).
Teorema 3.0.1. Si en la ecuacion (3.2), la funcion f(x, y, y′, y′′, ..., y(n−1)), cumple las propiedades:
Es continua respecto a sus argumentos x, y, y′, y′′, ..., y(n−1), en un dominio D de variacion delos mismos.
Tiene derivadas parciales continuas ∂f∂y ,
∂f∂y′ ,
∂f∂y′′ , ...,
∂f∂y(n−1) con respecto a los argumentos
y, y′, y′′, ..., y(n−1) en un dominio D, entonces, existe y ademas es unica la solucion y = φ(x)de la ecuacion (3.2), que verifica las condiciones:
y(x0) = y0, y′(x0) = y′0, . . . , y(n−1)(x0) = y
(n−1)0
(3.3)
donde los valores x = x0, y = y0, y′ = y′0, . . . , y(n−1) = y
(n−1)0 , estan definidos en alguna
region dentro del dominio D. Las condiciones (3.3), se llaman condiciones iniciales. El pro-blema que tiene por objetivo encontrar la solucion y = φ(x), de la ecuacion (3.2), que cumplelas condiciones (3.3), se llama problema de Cauchy .
121

122 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Antes de empezar el analisis de estas ecuaciones daremos algunas definiciones importantes parael caso de las ecuaciones diferenciales de orden superior.
Se llama solucion general de una ecuacion diferencial de orden n (3.2), al conjunto de todas lassoluciones determinadas por
y = φ(x, c1, c2, ..., cn) (3.4)
que contiene n constantes arbitrarias c1, c2, ..., cn. Cualquier solucion obtenida de la solucion general(3.4), con las condiciones iniciales (3.3), se llama solucion particular de la ecuacion (3.2), y serepresenta como
y = φ(x, c1, c2, ..., cn) (3.5)
donde c1, c2, ..., cn son numeros dados.
Una relacion de la forma
Φ(x, y, c1, c2, ..., cn) = 0 (3.6)
que determina en forma implıcita la solucion general de la ecuacion diferencial (3.2), se llama integralgeneral de la misma. Asignando a las constantes c1, c2, ..., cn valores numericos concretos, obtenemosuna integral particular de la ecuacion diferencial.
La grafica de una solucion particular o de una integral particular se llama curva integral de laecuacion diferencial considerada.
3.1. Ecuaciones Diferenciales de Orden Superior
La ecuacion de la forma
y(n) = f(x) (3.7)
es la mas simple de las ecuaciones de n-esimo orden. Para hallar su integral general es necesariointegrar n veces respecto a x. Al integrar una vez, tenemos
y(n−1) =∫ x
x0
f(x)dx+ c1, (3.8)
donde x0 es un valor arbitrario de x y c1 es una constante de integracion. Integrando una vez mas,tenemos
y(n−2) =∫ x
x0
( ∫ x
x0
f(x)dx)dx+ c1(x− x0) + c2. (3.9)
Procediendo de esta manera despues de n integraciones, obtendremos la expresion de la integralgeneral
y(x) =∫ x
x0
[ ∫ x
x0
(. . .
∫ x
x0
f(x)dx)dx
]dx+
c1(x− x0)(n−1)
(n− 1)!+c2(x− x0)(n−2)
(n− 2)!+. . .+cn−1(x−x0)+cn,
(3.10)

3.2. ECUACIONES DE ORDEN SUPERIOR REDUCIBLES A PRIMER ORDEN 123
donde c1, c2, . . . , cn son constantes arbitrarias. La formula (3.10), da la solucion general de la ecuacion(3.7). Observamos que la integracion de la parte derecha de (3.10), se realiza n veces, ademas estaintegral y sus derivadas de hasta (n−1) orden en x = x0, se anulan. Por eso, las constantes arbitrariasse definen unıvocamente por las condiciones iniciales,
cn = y0, cn−1 = y′0, . . . , c2 = y(n−2)0 , c1 = y
(n−1)0 . (3.11)
Ejemplo 1:
Resolver la ecuacion diferencialy′′′ = x. (3.12)
Solucion:
Integrando una vez, obtenemos
y′′(x) =∫ x
x0
xdx =x2
2
∣∣∣xx0
+ c1 =(x− x0)2
2+ c1. (3.13)
Integrando una vez mas, resulta
y′(x) =12
∫ x
x0
(x− x0)2dx+ c1
∫ x
x0
dx =(x− x0)3
2 · 3+ c1(x− x0) + c2. (3.14)
Por ultimo, la solucion general es
y(x) =(x− x0)4
2 · 3 · 4+c1(x− x0)2
2+ c2(x− x0) + c3. (3.15)
Ejemplo 2:
Resolver la ecuaciony′′(x) = cosωx, ω = constante. (3.16)
Solucion:
Integrando una vez, tenemos
y′(x) =∫
cosωxdx =1ω
senωx+ c1. (3.17)
Integrando una vez mas, tenemos la solucion general de la ecuacion (3.16),
y(x) =∫ ( 1
ωsenωx+ c1
)dx = − 1
ω2cosωx+ c1x+ c2. (3.18)
3.2. Ecuaciones de Orden Superior Reducibles a PrimerOrden
Existen algunas ecuaciones diferenciales de orden superior, las cuales pueden ser reducidas aecuaciones de primer orden.
Si la ecuacion (3.1), no contiene explıcitamente la funcion desconocida y(x), entonces, tiene laforma
F (x, y(k), y(k+1), ...., y(n)) = 0

124 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
En tal caso, el orden de la ecuacion se puede reducir, escogiendo por funcion desconocida laderivada de menor orden que entra en la ecuacion, es decir, haciendo el cambio y(k)(x) = p(x).
Si (3.1), no contiene explıcitamente la variable independiente x, entonces, tenemos la ecuacion
F (y, y′, y′′, ..., y(n)) = 0
En este caso, el orden de la ecuacion se puede reducir, tomando como funcion dependiente ay y como la nueva funcion desconocida a dy
dx = p(y).
Sin perder generalidad, analicemos los casos anteriores en ecuaciones diferenciales de segundoorden. Sea la ecuacion
y′′ = f(x, y, y′) (3.19)
Supongamos que esta ecuacion no contiene explıcitamente la funcion desconocida y(x), entonces
y′′ = f(x, y′) (3.20)
Para resolver este tipo de ecuaciones, se introduce la siguiente definicion
p(x) =dy
dx. (3.21)
Entoncesdp
dx=d2y
dx2. (3.22)
Sustituyendo en la ecuacion (3.20), tenemos
dp
dx= f(x, p), (3.23)
donde, ahora p es la funcion desconocida de x. Esta ecuacion es de primer orden. Integrando, ten-dremos
p(x) = p(x, c1). (3.24)
Recordando que dydx = p(x) → dy = p(x)dx→ dy = p(x, c1)dx e integrando
y(x) =∫p(x, c1)dx+ c2, (3.25)
donde c1 y c2 son constantes de integracion. La expresion (3.25), representa la solucion general dela ecuacion (3.20).
Ejemplo 1:
Resolver la ecuacionx2y′′ = (y′)2. (3.26)
Solucion:

3.2. ECUACIONES DE ORDEN SUPERIOR REDUCIBLES A PRIMER ORDEN 125
Definiendo
p(x) =dy
dx→ dp
dx=d2y
dx2. (3.27)
Sustituyendo en (3.26), se obtiene la ecuacion de primer orden
x2 dp
dx= p2, (3.28)
la cual es una ecuacion con variables separables∫dp
p2=
∫dx
x2. (3.29)
Integrando
−1p
= − 1x− c1 → 1
p=
1x
+ c1. (3.30)
Usando la primera ecuacion de (3.27), tenemos
dx
dy=
1x
+ c1. (3.31)
Separando las variables e integrando ∫xdx
c1x+ 1=
∫dy. (3.32)
Integremos la parte izquierda, obtenemos
1c1
∫c1x+ 1− 1c1x+ 1
dx =1c1
∫ (1− 1
c1x+ 1
)dx =
1c1x− 1
c1
∫dx
c1x+ 1=
1c1x− 1
c21ln |c1x+1|. (3.33)
Entonces, el resultado es1c1x− 1
c21ln |c1x+ 1| = y + c2. (3.34)
Este mismo resultado lo podemos escribir en una forma mas elegante, a decir
c1x− c21y = ln |c1x+ 1|+ C2, (3.35)
donde C2 = c21c2.
Supongamos ahora que la variable independiente x no aparece explıcitamente en la ecuacion(3.19). Entonces, la ecuacion tendra la forma
y′′ = f(y, y′) (3.36)
Para resolver esta ecuacion hagamos el cambio de funcion, es decir
dy
dx= p(y). (3.37)
Nadamas que ahora debemos considerar a p como funcion de y. Entonces, haciendo uso de la reglade la cadena
d2y
dx2=dp
dx=dp
dy
dy
dx= p(y)
dp
dy, (3.38)

126 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sustituyendo en la ecuacion (3.36), obtenemos
p(y)dp
dy= f(y, p). (3.39)
Integrando, hallamosp(y) = p(y, c1). (3.40)
Recordando que dydx = p(y), obtenemos una ecuacion diferencial de primer orden para la funcion y
de x, es decirdy
dx= p(y, c1). (3.41)
Separando variables, tenemosdy
p(y, c1)= dx. (3.42)
Integrando esta ecuacion, obtenemos la integral general de la ecuacion (3.36), esta tiene la forma
x =∫
dy
p(y, c1)+ c2. (3.43)
Ejemplo 2:
Hallar la solucion general de la ecuacion
y′′ = 2yy′. (3.44)
Solucion:
Esta ecuacion es del tipo (3.36). Ası que, definiendo
dy
dx= p(y) → d2y
dx2= p(y)
dp
dy. (3.45)
Sustituyendo en la ecuacion (3.44), obtenemos
pdp
dy= 2yp → dp
dy= 2y. (3.46)
Esta ultima expresion es una ecuacion de primer orden con variables separables. Integrando seobtiene ∫
dp = 2∫ydy → p = y2 + c21, (3.47)
donde hemos escogido a la constante de integracion como c21, esto es por comodidad. Luego, susti-tuyendo p(y) = dy
dx , en la segunda ecuacion de (3.47), tenemos
dy
dx= y2 + c21. (3.48)
Esta ecuacion es tambien de primer orden y de variables separables. Integrando∫dy
y2 + c21=
∫dx. (3.49)
Recordando la formula de integracion∫
dxx2+a2 = 1
a arc tg(xa ), donde a es una constante. Ahora
queda claro por que elegimos a c21 como constante de integracion. Usando esta formula, tenemos queel resultado de la integracion en (3.49), es
1c1
arc tg( yc1
)= x+ c2. (3.50)

3.2. ECUACIONES DE ORDEN SUPERIOR REDUCIBLES A PRIMER ORDEN 127
Este mismo resultado lo podemos escribir como
y(x) = c1 tg(c1x+ c), (3.51)
donde c = c1c2, esto en realidad no afecta el resultado, ya que el producto de dos constantes es otraconstante.
Por ultimo, si x y y′ no aparecen explıcitamente en (3.19), entonces, tenemos la ecuacion
y′′ = f(y) (3.52)
Este tipo de ecuaciones es un caso particular de (3.36). Haciendo
p(y) =dy
dx→ y′′ =
d
dx
(dydx
)=
d
dx[p(y)] =
d
dyp(y)
dy
dx= p(y)
dp
dy. (3.53)
Sustituyendo el resultado anterior en (3.52), obtenemos una ecuacion de primer orden respecto a p,esto es
p(y)dp
dy= f(y). (3.54)
Esta ecuacion es de variables separables. Separando las variables
pdp = f(y)dy →∫pdp =
∫f(y)dy, (3.55)
e integrandop2
2=
∫f(y)dy +
c12, (3.56)
donde hemos tomado a c1/2 como constante de integracon. Despejando p, tenemos
p = ±
√2
∫f(y)dy + c1, (3.57)
Recordando que p(y) = dydx , resulta
dy
dx= ±
√2
∫f(y)dy + c1. (3.58)
Esta ultima ecuacion es de variables separables. Separando las variables e integrando∫dy√
2∫f(y)dy + c1
= ±(x+ c2). (3.59)
La ecuacion (3.59), representa la solucion general, en forma implıcita, de la ecuacion (3.52).
Problema:
Hallar una curva para la cual, su radio de curvatura sea igual al cubo de la normal. La curvabuscada debera pasar por el punto P (0, 1), y tener en este punto la pendiente que forme un anguloα = 450 con el eje Ox.
Solucion:

128 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sabemos que el radio de curvatura de una curva plana esta dado por la expresion
R =
[1 + (y′)2
]3/2
y′′. (3.60)
Por otro lado, la longitud de la normal esta dada por
N = y√
1 + (y′)2. (3.61)
Entonces, de las condiciones del problema, es decir, R = N3, resulta
(y√
1 + (y′)2)3
=
[1 + (y′)2
]3/2
y′′. (3.62)
Esta misma ecuacion se puede escribir como
y3[1 + (y′)2
]3/2
=
[1 + (y′)2
]3/2
y′′. (3.63)
Eliminando el termino con exponente 3/2, obtenemos la ecuacion diferencial
y′′y3 = 1 → y′′ = y−3, (3.64)
que modela el problema dado. Esta ecuacion es del tipo y′′ = f(y). Sabemos que para resolver estetipo de ecuaciones podemos hacer el cambio
p(y) =dy
dx→ d2y
dx2= p(y)
dp
dy. (3.65)
De esta manera la ecuacion (3.64), se reduce a una ecuacion con variables separables
pdp
dy= y−3 → pdp = y−3dy. (3.66)
Integrando, resulta∫pdp =
∫y−3dy → p2
2= −y
−2
2+c12
→ p2 = −y−2 + c1. (3.67)
Esta ultima ecuacion la podemos escribir en funcion de x, y recordando el cambio p(y) = dydx ,
obtenemos una ecuacion de primer orden
dy
dx=
√c1 − y−2. (3.68)
La constante de integracion c1 la encontramos de las condiciones iniciales. La tangente en el puntoP (0, 1) (esto es x0 = 0, y0 = 1), forma un angulo α = 450, es decir, y′(0) = tgα = tg 450 = 1.Sustituyendo estas condiciones en (3.68), tenemos el valor de la constante
1 =√c1 − 1 → c1 = 2. (3.69)
Sustituyendo el valor de c1 en (3.68), tenemos la ecuacion
dy
dx=
√2− y−2 → y√
2y2 − 1dy = dx → 1
4
∫d(2y2)√2y2 − 1
= dx. (3.70)

3.3. ECUACIONES DIFERENCIALES LINEALES DE ORDEN SUPERIOR 129
Integrando la ultima expresion, resulta
12(2y2 − 1)1/2 = x+
c22
→ (2y2 − 1)1/2 = 2x+ c2. (3.71)
Despejando a y, tenemos
y2 =12
[(2x+ c2)2 + 1
]. (3.72)
De las condiciones iniciales, la curva debe pasar por el punto P (0, 1), esto es y(0) = 1. Sustituyendoesta condicion, tenemos que el valor de la constante c2 es, c2 = 1. Finalmente, tenemos que elresultado es
y2 =12
[(2x+ 1)2 + 1
]. (3.73)
Desarrollando el binomio y dividiendo entre 2, tenemos una forma mas visible de la solucion, estaes,
y2 = 2x2 + 2x+ 1. (3.74)
Esta curva cumple las condiciones del problema planteado.
3.3. Ecuaciones Diferenciales Lineales de Orden Superior
Las ecuaciones diferenciales lineales aparecen en el estudio de varios problemas practicos en laciencia e ingenierıa. Por ejemplo, las ecuaciones diferenciales lineales con coeficientes constantessurgen en la teorıa de circuitos electricos, vibraciones, mezclas de substancias, etc,. La solucion delas ecuaciones lineales con coeficientes constantes pueden ser obtenidas en terminos de las funcioneselementales conocidas (exponenciales, trigonometricas, logarıtmicas, etc,.), y por lo tanto tienen unainterpretacion muy transparente.
Antes de comenzar con los metodos de solucion de las ecuaciones lineales de orden superior,daremos algunas definiciones y propiedades basicas.
Una ecuacion diferencial de n-esimo orden es lineal, si esta es de primer grado respecto a la funciondesconocida y y sus derivadas y′, y′′, ..., y(n). Una ecuacion diferencial lineal de n-esimo orden tienela forma
an(x)y(n)(x) + an−1(x)y(n−1)(x)+, ...,+a2(x)y′′(x) + a1(x)y′(x) + a0(x)y(x) = g(x) (3.75)
donde a0(x), a1(x), ...., an(x) y g(x) son funciones continuas de x, ademas an(x) 6= 0, para todos losvalores de x, en el dominio de definicion de la ecuacion (3.75). Si g(x) 6= 0, entonces (3.75), se llamaecuacion diferencial lineal no homogenea . Si g(x) = 0, la ecuacion (3.75), se reduce a una ecuacionde la forma
an(x)y(n)(x) + an−1(x)y(n−1)(x)+, ...,+a2(x)y′′(x) + a1(x)y′(x) + a0(x)y(x) = 0 (3.76)
A esta ecuacion se le conoce como ecuacion diferencial lineal homogenea .
Propiedades Fundamentales de las Ecuaciones Lineales Homogeneas

130 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sin perder generalidad, vamos a exponer las propiedades fundamentales de las ecuaciones lineales,para el caso de ecuaciones de segundo orden. Estas mismas propiedades son validas para ecuacioneslineales de cualquier orden.
Sea dada la ecuacion diferencial lineal homogenea de segundo orden
a2(x)y′′ + a1(x)y′ + a0(x)y = 0 (3.77)
Si a2(x) 6= 0, entonces, esta misma ecuacion la podemos escribir de la siguiente manera
y′′ + P (x)y′ +Q(x)y = 0 (3.78)
llamada forma estandar, donde P (x) = a1(x)/a2(x) y Q(x) = a0(x)/a2(x), son funciones continuasen un intervalo dado.
Teorema 3.3.1. Si y1(x) y y2(x) son dos soluciones de la ecuacion (3.78), entonces
y(x) = y1(x) + y2(x) (3.79)
es tambien solucion de (3.78).
4 Sean y1 y y2 las dos soluciones de la ecuacion (3.78), entonces
y′′1 + P (x)y′1 +Q(x)y1 = 0, y y′′2 + P (x)y′2 +Q(x)y2 = 0. (3.80)
El teorema afirma que y1 + y2 es tambien solucion de (3.78). Ası que, sustituyendo (3.79), en laecuacion (3.78), tenemos
(y1 + y2)′′ + P (x)(y1 + y2)′ +Q(x)(y1 + y2) = 0. (3.81)
Debemos probar que esta relacion efectivamente es cero. De (3.81), obtenemos
y′′1 + y′′2 + P (x)y′1 + P (x)y′2 +Q(x)y1 +Q(x)y2 = 0 (3.82)
Agrupando terminos y usando las expresiones (3.80),[y′′1 + P (x)y′1 +Q(x)y1
]+
[y′′2 + y′2 +Q(x)y2
]= 0 + 0 = 0. 4 (3.83)
Las expresiones en los parentesis cuadrados son cero, ya que y1 y y2 satisfacen la ecuacion (3.78).
Teorema 3.3.2. Si y1(x) es una solucion de (3.78), y c es una constante arbitraria, entonces, elproducto
y(x) = cy1(x) (3.84)
es tambien solucion de (3.78).

3.3. ECUACIONES DIFERENCIALES LINEALES DE ORDEN SUPERIOR 131
4 Sea c una constante arbitraria y y1 una solucion conocida de (3.78). Debemos probar que elproducto cy1 es tambien una solucion de (3.78). Entonces, tenemos
(cy1)′′ + P (x)(cy1)′ +Q(x)(cy1) = 0 → c[y′′1 + P (x)y′1 +Q(x)y1] = c · 0 = 0. 4 (3.85)
La expresion que esta en parentesis cuadrados es cero, ya que y1 satisface la ecuacion (3.78).
Dos soluciones y1(x) y y2(x) de la ecuacion (3.78), se llaman linealmente independientes en elsegmento [a, b], si su razon en dicho segmento no es constante, es decir, cuando se cumple la relacion
y1y26= const. (3.86)
En caso contrario, las soluciones y1(x) y y2(x) se llaman linealmente dependientes. Es decir, dossoluciones y1 y y2 son linealmente dependientes en el segmento [a, b], si existe un cierto numeroconstante λ, tal que y1/y2 = λ, cuando a ≤ x ≤ b. En tal caso, y1 = λy2.
Para el caso general, tenemos las siguientes definiciones: Sean y1(x), y2(x), ..., yn(x) funcionesdefinidas en cierto segmento [a, b] de variacion de x. Entonces, decimos que las funciones son lineal-mente dependientes si existen magnitudes constantes α1, α2, ..., αn, que en el segmento [a, b] satisfacenla relacion
α1y1(x) + α2y2(x) + . . .+ αnyn(x) = 0 (3.87)
y ademas, por lo menos un αi 6= 0. Si la expresion (3.87), tiene lugar solo cuando α1 = α2 = . . . =αn = 0, entonces, se dice que las funciones y1(x), y2(x), ..., yn(x) son linealmente independientes enel segmento [a, b].
Teorema 3.3.3. Sean y1(x), y2(x), ..., yn(x) funciones continuas y diferenciables hasta (n − 1) enel segmento [a, b]. Entonces, si en dicho segmento el determinante
W (x) = det
y1(x) y2(x) . . . yn(x)y′1(x) y′2(x) . . . y′n(x)
......
. . ....
yn−11 (x) yn−1
2 (x) . . . yn−1n (x)
(3.88)
es identicamente cero, decimos que las funciones son linealmente dependientes . Por otro lado, siel determinante es diferente de cero, decimos que las funciones son linealmente independientes . Aldeterminante (3.88), se le conoce como el Wronskiano de las funciones y1(x), y2(x), . . . , yn(x).
4 El teorema anterior lo vamos a demostrar para el caso particular de dos funciones. Sean y1(x)y y2(x) dos funciones continuas y diferenciables. Entonces, de la expresion (3.88), tenemos que elWronskiano de las funciones dadas, es
W (x) = det(y1 y2y′1 y′2
)= y1y
′2 − y′1y2, (3.89)
Luego, supongamos que las funciones y1(x) y y2(x) son linealmente dependientes en el segmento[a, b], entonces, necesitamos demostrar que el Wronskiano en este segmento es identicamente cero.
Debido a que las funciones y1 y y2 son linealmente dependientes, entonces, existe la relacion
y2 = λy1 → y′2 = λy′1, (3.90)

132 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
donde λ es una constante arbitraria. De la definicion (3.89), resulta
W = det(y1 y2y′1 y′2
)= det
(y1 λy1y′1 λy′1
)= λ det
(y1 y1y′1 y′1
)= λ(y1y′1 − y1y
′1) = 0. 4 (3.91)
Teorema 3.3.4. Si el Wronskiano W (y1, y2), de las soluciones y1 y y2 de la ecuacion (3.78), no seanula en un punto x = x0 del segmento [a, b], donde los coeficientes de la ecuacion son continuos,entonces no se anula para cualquier valor de x en este segmento.
4 Debido a que y1 y y2 son dos soluciones de la ecuacion (3.78), tenemos
y′′1 + P (x)y′1 +Q(x)y1 = 0, y′′2 + P (x)y′2 +Q(x)y2 = 0. (3.92)
Multiplicando los terminos de la primera ecuacion por y2, y los terminos de la segunda ecuacion pory1 y despues restandolos, obtenemos
(y1y′′2 − y′′1 y2) + P (x)(y1y′2 − y′1y2) = 0. (3.93)
La diferencia encerrada en el segundo parentesis es el Wronskiano de W (y1, y2), es decir
W (y1, y2) = (y1y′2 − y′1y2). (3.94)
Luego, la diferencia encerrada en el primer parentesis es la derivada del Wronskiano respecto a x,es decir
W (y1, y2)′x = (y1y′2 − y′1y2)′x = y′2y
′1 + y1y
′′2 − y′′1 y2 − y′1y
′2 = y1y
′′2 − y′′1 y2. (3.95)
De tal manera que la expresion (3.93), se puede escribir como
dW
dx+ P (x)W = 0. (3.96)
Supongamos queW 6= 0, entonces, esta ecuacion es facil de integrar, ya que es de variables separables,tenemos ∫
dW
W= −
∫P (x)dx → ln
∣∣∣Wc
∣∣∣ = −∫P (x)dx. (3.97)
Luego, usando las propiedades de los logaritmos
W = ce−∫
P (x)dx. (3.98)
Determinamos a c de tal manera que se cumpla la condicion inicial. Poniendo x = x0 en el primery segundo miembro de la ecuacion (3.98), obtenemos
W0 = c. (3.99)
Por lo tanto, la solucion que satisface las condiciones iniciales tendra la forma
W = W0e−
∫P (x)dx. (3.100)
Segun la hipotesis W0 6= 0. De la ecuacion (3.100), se deduce que W 6= 0, cualquiera que sea elvalor de x, puesto que la funcion exponencial no se reduce a cero para todos los valores finitos de lavariable x. El teorema queda demostrado. 4
Observacion:
Si el Wronskiano es nulo para cierto valor de x = x0, el determinante tambien sera igual a ceropara cualquier valor de x en el segmento considerado. Lo anterior se deduce de la expresion (3.98),si W = 0 para cierto valor de x = x0, entonces
W (x0) = c = 0, (3.101)
por lo tanto, W = 0, cualquiera que sea el valor del lımite superior de x en la expresion (3.98).

3.3. ECUACIONES DIFERENCIALES LINEALES DE ORDEN SUPERIOR 133
Teorema 3.3.5. Si las soluciones y1 y y2 de la ecuacion (3.78), son linealmente independientesen [a, b], el Wronskiano W formado por estas soluciones no se reduce a cero en ningun punto delintervalo.
Teorema 3.3.6. Sean y1 y y2 soluciones de la ecuacion (3.78), entonces la combinacion lineal deestas soluciones
y(x) = c1y1(x) + c2y2(x) (3.102)
donde c1 y c2 son constantes arbitrarias, sera la solucion general de (3.78).
4 De los teoremas (3 · 3 · 1) y (3 · 3 · 2) se deduce que la funcion
c1y1 + c2y2, (3.103)
es la solucion de la ecuacion (3.78), cualesquiera que sean las constantes c1 y c2. Ahora, necesitamosdemostrar que para cualesquiera que sean las condiciones iniciales y(x0) = y0, y′(x0) = y′0, es posibleescoger los valores de las constantes c1 y c2, de tal manera que la solucion particular obtenida dec1y1 + c2y2, cumpla las condiciones iniciales dadas. Sustituyendo las condiciones iniciales en laecuacion (3.102), obtenemos
c1y10 + c2y20 = y0
c1y′10 + c2y
′20 = y′0, (3.104)
donde hemos escrito y1(x0) = y10, y2(x0) = y20, y′1(x0) = y′10, y′2(x0) = y′20. Del sistema(3.104), podemos definir a las constantes c1 y c2, ya que el determinante de este sistema(el Wron-skiano)
W = det(y10 y20y′10 y′20
)= y10y
′20 − y′10y20 6= 0, (3.105)
cuando x = x0, no es cero(esto es debido a la independencia de las soluciones y1 y y2). La solucionparticular que se obtiene de (3.104), para los valores hallados de c1 y c2, satisfacen las condicionesiniciales dadas. Ası el teorema queda demostrado. 4
Observacion:
No existen metodos generales que nos permitan hallar, en forma exacta, la solucion general deuna ecuacion diferencial lineal con coeficientes variables. Sin embargo, existe un teorema que nospermite hallar la solucion general de una ecuacion diferencial de segundo orden con coeficientesvariables si, de antemano, se conoce una de sus soluciones particulares.
Teorema 3.3.7. Si se conoce una solucion particular y1(x), de la ecuacion lineal homogenea desegundo orden (3.78), siempre es posible hallar una segunda solucion y2(x), linealmente indepen-diente.
4 Sea la ecuacion lineal homogenea de segundo orden en su forma estandar
y′′ + P (x)y′ +Q(x)y = 0 (3.106)
donde P (x) y Q(x) son funciones continuas en [a, b]. Supongamos que y1(x) 6= 0 es una solucionconocida de la ecuacion (3.106). Definamos una segunda solucion de la forma
y = u(x)y1(x) (3.107)

134 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Tomando las derivadas tenemos
y′ = uy′1 + y1u′
y′′ = uy′′1 + 2y′1u′ + y1u
′′. (3.108)
Sustituyendo en la ecuacion (3.106),
y′′ + Py′ +Qy = u[y′′1 + Py′1 +Qy1] + y1u′′ + (2y′1 + Py1)u′ = 0. (3.109)
La parte que esta entre parentesis cuadrados es cero, ya que por suposicion hemos dicho que y1(x)satisface la ecuacion de segundo orden. Ası, tenemos
y1u′′ + (2y′1 + Py1)u′ = 0. (3.110)
Para reducir el orden hagamos la redefinicion
z = u′, (3.111)
entonces, resultay1z
′ + (2y′1 + Py1)z = 0. (3.112)
Vemos que esta ecuacion diferencial es lineal y de variables separables, es decir, la podemos escribirde la siguiente manera
dz
z+ 2
y′1y1dx+ Pdx = 0. (3.113)
Integrando, obtenemos
ln |z|+ 2 ln |y1| = −∫P (x)dx+ ln c1. (3.114)
Usando las propiedades de los logaritmos, podemos reescribir esta ecuacion de la siguiente manera
ln |zy21 | = −
∫P (x)dx+ ln c1 → zy2
1 = c1e−
∫P (x)dx, (3.115)
de donde
u′ = z = c1e−
∫P (x)dx
y21
. (3.116)
Integrando de nuevo, tenemos
u = c1
∫e−
∫P (x)dx
y21
dx+ c2. (3.117)
Finalmente, la solucion general es
y = u(x)y1(x) = c1y1(x)∫e−
∫P (x)dx
y21
dx+ c2y1(x). (3.118)
Eligiendo c2 = 0 y c1 = 1, encontramos que la segunda solucion y(x) = y2(x), tiene la forma
y2(x) = y1(x)∫e−
∫P (x)dx
y21(x)
dx. (3.119)
De la expresion (3.119), podemos concluir que las soluciones y1 y la obtenida y2 son linealmenteindependientes, ya que la relacion
y2(x)y1(x)
=∫e−
∫P (x)dx
y21(x)
dx, (3.120)

3.3. ECUACIONES DIFERENCIALES LINEALES DE ORDEN SUPERIOR 135
no es una constante. Entonces, la solucion general de (3.106), es la combinacion lineal formada porestas funciones, es decir
y(x) = c1y1(x) + c2y2(x), (3.121)
donde c1 y c2 son dos constantes arbitrarias. 4
Este teorema es muy util, siempre y cuando se logre hallar directamente o adivinar una solucionparticular de la ecuacion (3.78).
Ejemplo 1:
Hallar la solucion general de la ecuacion diferencial
(ex + 1)y′′ − 2y′ − exy = 0. (3.122)
Solucion:
Como podemos ver, la ecuacion es de coeficientes variables. Podemos adivinar, a prueba y error,una solucion particular. Debido a que los coeficientes de la ecuacion son exponentes, entonces,supongamos que la solucion particular es
y1 = ex + α, (3.123)
donde α es una constante arbitraria que debemos encontrar. Sustituyendo la expresion (3.123), en(3.122), tenemos
(ex + 1)ex − 2ex − ex(ex + α) = e2x + ex − 2ex − e2x − αex = ex(1− 2− α) = 0, (3.124)
ya que ex 6= 0, entonces (1− 2− α) = 0, para que esto se cumpla, tenemos que α = −1. Entonces,de (3.123), tenemos
y1 = ex − 1, (3.125)
es una solucion particular de la ecuacion (3.122). Para hallar una segunda solucion linealmenteindependiente hagamos uso de la formula (3.119). Escribamos la ecuacion (3.122), en su formaestandar
y′′ − 2ex + 1
y′ − ex
ex + 1y = 0. (3.126)
De esta expresion podemos identificar a P (x) = − 2ex+1 . Entonces, de la formula (3.119), tenemos
y2(x) = y1(x)∫e−
∫P (x)dx
y21(x)
dx = (ex − 1)∫e∫ 2
ex+1 dx
(ex − 1)2dx. (3.127)
Vamos a calcular por separado las integrales. Primero hallemos la integral que esta en el exponente∫2dxex + 1
→[t = ex → dt = exdx = tdx → dx =
dt
t
]=
∫2dt
t(t+ 1). (3.128)
Por separado, desarrollemos en fracciones parciales
1t(t+ 1)
=A
t+
B
t+ 1→ A(t+ 1) +Bt = 1 → A = 1, B = −1. (3.129)
Entonces1
t(t+ 1)=
1t− 1t+ 1
. (3.130)

136 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sustituyendo este resultado en (3.128), e integrando, tenemos∫2dxex + 1
=∫
2dtt(t+ 1)
=∫ (2
t− 2t+ 1
)dt = 2 ln t− 2 ln |t+ 1| = ln
( t
t+ 1
)2
. (3.131)
Recordando que hicimos el cambio de variables, t = ex, tenemos el resultado de la integral (3.128),∫2dxex + 1
= ln( ex
ex + 1
)2
. (3.132)
Luego, sustituyendo en (3.127), resulta
y2(x) = (ex − 1)∫eln
(ex
ex+1
)2
(ex − 1)2dx = (ex − 1)
∫e2xdx
(ex + 1)2(ex − 1)2. (3.133)
Esta misma expresion la podemos escribir como
y2(x) = (ex − 1)∫
e2xdx
[(ex + 1)(ex − 1)]2= (ex − 1)
∫e2xdx
(e2x − 1)2. (3.134)
Integrando, obtenemos
y2(x) =(ex − 1)
2
∫d(e2x − 1)(e2x − 1)2
= − (ex − 1)2(e2x − 1)
. (3.135)
Entonces, tenemos que la segunda solucion linealmente independiente de la ecuacion (3.122), es
y2(x) = − (ex − 1)2(e2x − 1)
= −12
(ex − 1)(ex + 1)(ex − 1)
= −12
1ex + 1
. (3.136)
Finalmente, la combinacion lineal de estas dos soluciones sera la solucion general de la ecuacion(3.122), a decir
y(x) = c1y1(x) + c2y2(x) = c1(ex − 1) +c2
ex + 1, (3.137)
donde, c1 y c2 son ciertas constantes arbitrarias. En la constante c2 esta incluido el factor − 12 , de la
ecuacion (3.136).
Ejemplo 2:
Hallar una segunda solucion linealmente independiente de la ecuacion diferencial con las condi-ciones dadas
y′′ − y = 0, y(0) = 1, y′(0) = 3, (3.138)
si, de antemano, se sabe que y1 = ex, es una solucion.
Solucion:
Hagamos uso de la formula antes obtenida (3.119), donde P (x) = 0.
y2 = y1(x)∫e−
∫P (x)dx
y21
dx = ex
∫e−2xdx = −1
2exe−2x = −1
2e−x. (3.139)
Podemos identificar a la segunda solucion como
y2(x) = e−x. (3.140)

3.4. ECUACIONES LINEALES CON COEFICIENTES CONSTANTES 137
La solucion general de la ecuacion (3.138), tiene la forma
y(x) = c1ex + c2e
−x, (3.141)
donde c1 y c2 son ciertas constantes arbitrarias. Ahora, obtengamos la solucion particular con lascondiciones dadas en (3.138). Para esto calculamos la derivada de la solucion general
y′(x) = c1ex − c2e
−x. (3.142)
Poniendo las condiciones iniciales, tenemos el siguiente sistema de ecuaciones con dos incognitas c1y c2.
c1 + c2 = 1,c1 − c2 = 3. (3.143)
Resolviendo este sistema, tenemos que c1 = 2 y c2 = −1. Ası, la solucion que cumple las condicionesdadas en (3.138), es
y(x) = 2ex − e−x. (3.144)
3.4. Ecuaciones Lineales con Coeficientes Constantes
Supongamos que los coeficientes de ai(x), (i = 1, 2, ..., n) en la ecuacion (3.76), son constantes,entonces, tenemos la ecuacion lineal homogenea con coeficientes constantes de orden n
any(n)(x) + an−1y
(n−1)(x)+, ...,+a1y′(x) + a0y(x) = 0 (3.145)
Obviamente, la ecuacion (3.145), siempre tiene la solucion y = 0, pero esta solucion es la trivial yno es de importancia. Supongamos que la solucion no trivial de la ecuacion (3.145), tiene la forma
y = emx (3.146)
donde m es un parametro arbitrario que sera determinado segun la forma de la ecuacion diferencial.Sustituyendo (3.146), en la ecuacion diferencial (3.145), tenemos
emx(anmn + an−1m
n−1+, ......,+a1m+ a0) = 0. (3.147)
Debido a que, por suposicion, emx 6= 0, entonces, lo que debe ser cero es la expresion que esta dentrode los parentesis, esto es
anmn + an−1m
n−1+, ......,+a1m+ a0 = 0 (3.148)
A esta ecuacion se le conoce como ecuacion caracterıstica de la ecuacion diferencial dada. Pareceser que resolver la ecuacion diferencial sera mas facil, ya que el problema ahora se reduce a resolveruna ecuacion algebraica de orden n, esto es cierto para el caso en que n = 2, 3, 4.

138 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
De la expresion general (3.145), resulta que una ecuacion diferencia lineal de primer orden concoeficientes constantes tiene la forma
ay′ + by = 0 (3.149)
Luego, suponemos la solucion y = emx (3.146), y sustituyendo en la ecuacion (3.149), obtenemos laecuacion caracterıstica
am+ b = 0 → m = − ba. (3.150)
Sustituyendo el resultado obtenido para m en la solucion propuesta (3.146), entonces, la soluciongeneral, es
y = ce−ba x, (3.151)
donde c es una constante, la cual juega el papel de constante de integracion y depende de lascondiciones iniciales del problema.
La ecuacion (3.149), se puede resolver tambien separando las variables, esto es
dy
dx+b
ay = 0 →
∫dy
y+b
a
∫dx = 0 → ln
(yc
)= − b
ax → y = ce−
ba x. (3.152)
La ultima expresion de (3.152), es la solucion general de la ecuacion (3.149), la cual coincide con lasolucion ya obtenida en (3.151). En general, toda ecuacion diferencial lineal homogenea de primerorden se puede resolver separando las variables o suponiendo la solucion (3.146).
Analicemos las ecuaciones lineales de segundo orden con coeficientes constantes, es decir, ecua-ciones de la forma
ay′′ + by′ + cy = 0 (3.153)
Luego, supongamos que la solucion es de la forma
y = emx (3.154)
Sustituyendo en (3.153), tenemos que la expresion que debe ser cero es
am2 + bm+ c = 0 (3.155)
Esta es una ecuacion cuadratica. Existen tres casos de interes:
Primer caso: Supongamos que las raıces m1 y m2 son reales y diferentes. En tal caso, tenemosdos diferentes soluciones y1 = em1x y y2 = em2x. Entonces, la solucion general de la ecuacion (3.153),es la combinacion lineal de y1 y y2,
y = c1y1(x) + c2y2(x) = c1em1x + c2e
m2x (3.156)

3.4. ECUACIONES LINEALES CON COEFICIENTES CONSTANTES 139
Ejemplo 1:
Resolver la ecuacion diferencial homogenea de segundo orden
y′′ + 4y′ + 3y = 0. (3.157)
Solucion:
La solucion es de la forma y = emx, sustituyendo en la ecuacion, tenemos
m2 + 4m+ 3 = 0 → (m+ 1)(m+ 3) = 0. (3.158)
Las soluciones sonm1 = −1, m2 = −3. (3.159)
Entonces, la solucion general de la ecuacion (3.157), tiene la forma
y(x) = c1e−x + c2e
−3x. (3.160)
donde c1 y c2 son constantes arbitrarias que dependen de las condiciones iniciales del problema.
Las funciones y1(x) y y2(x) son linealmente independientes, ya que el Wronskiano formado porestas funciones nos da
W = det(y1 y2y′1 y′2
)= det
(e−x e−3x
−e−x −3e−3x
)= −2e−4x 6= 0. (3.161)
El Wronskiano es diferente de cero, entonces, y1(x) y y2(x) son linealmente independientes.
Segundo caso. Ahora, supongamos que las raıces son reales e iguales. Es decir, m1 = m2 = m.En tal caso, tenemos la solucion
y1 = cemx (3.162)
Para encontrar una segunda solucion linealmente independiente haremos uso de la formula
y2 = y1(x)∫e−
∫P (x)dx
y21(x)
dx, (3.163)
donde y1(x) es conocida. De la formula cuadratica (3.155), tenemos que m1 = − b2a , ya que para
que se cumpla m1 = m2 es necesario que b2 − 4ac = 0. Sustituyendo esto en la formula anterior,encontramos
y2 = em1x
∫e2m1x
e2m1xdx = em1x
∫dx = xem1x. (3.164)
Ası, la solucion general de (3.153) para el caso en que m1 = m2, es
y(x) = c1emx + c2xe
mx (3.165)
Como conclusion tenemos que, en realidad, no es necesario calcular una segunda solucion cada vezque resulte una raız doble, ya que el resultado sugiere que, en general, podemos hacer la siguienteafirmacion:
Si m es una raız doble de la ecuacion caracterıstica (3.155), entonces, junto con la solucion
y1 = emx,

140 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
se tiene tambien la segunda soluciony2 = xemx,
y la combinacion lineal de estas soluciones sera la solucion general dada por (3.165), multiplicadaspor sus correspondientes constantes arbitrarias.
En general, es decir, el caso en que la ecuacion caracterıstica (3.148), tenga una raız real m = ade multiplicidad r, que corresponde a un factor (m− a)r, entonces, las r funciones
y = eax, y = xeax, y = x2eax, ...., y = xm−1eax, (3.166)
son soluciones de la ecuacion diferencial (3.145), y por lo tanto la combinacion lineal de estas sera lasolucion general de (3.145), la cual tiene la forma
y(x) = c0eax + c1xe
ax + c2x2eax + · · ·+ cm−1x
m−1eax (3.167)
Ejemplo 2:
Resolver la ecuacion diferencialy′′ + 6y′ + 9y = 0. (3.168)
Solucion:
La solucion tiene la forma y = emx y sustituyendo en la ecuacion (3.168), tenemos la ecuacioncaracterıstica
m2 + 6m+ 9 = 0. (3.169)
Haciendo uso de la formula para resolver ecuaciones cuadraticas, tenemos
m1,2 = −62±√
36− 362
= −3. (3.170)
Entonces, existe una solucion y1 = e−3x. Luego, de (3.166), tenemos que la segunda solucion es-tara dada por la expresion
y2 = xe−3x. (3.171)
Entonces, la solucion general tiene la forma
y(x) = c1e−3x + c2xe
−3x = (c1 + c2x)e−3x. (3.172)
Ejemplo 3:
Resolver la ecuacion diferencialy(n) = 0. (3.173)
Solucion:
La ecuacion caracterıstica correspondiente es
mn = 0, (3.174)
y tiene solamente la raız m = 0, de multiplicidad n. Entonces, las funciones correspondientes seran
y = e0x = 1, y = xe0x = x, y = x2e0x = x2, ... y = xn−1e0x = xn−1,

3.4. ECUACIONES LINEALES CON COEFICIENTES CONSTANTES 141
que son claramente soluciones de la ecuacion dada. Entonces, la solucion general es
y(x) = c0 + c1x+ c2x2 + · · ·+ cn−1x
n−1. (3.175)
Tercer caso. Por ultimo, supongamos que las raıces, en (3.155) son complejas conjugadas, estoes, suponemos que tienen la forma
m1 = α+ iβ, m2 = α− iβ. (3.176)
donde α y β son numeros reales, e i =√−1 es la identidad compleja. En tal caso, la solucion general
seray = c1e
(α+iβ)x + c2e(α−iβ)x. (3.177)
Este resultado lo podemos transformar usando la formula de Euler eiθ = cos θ + i sen θ, tenemos
eiβx = cosβx+ i senβx, e−iβx = cosβx− i senβx, (3.178)
donde, hemos usado las propiedades de cos (−βx) = cosβx y sen (−βx) = − senβx. Sustituyendoen la ecuacion (3.177), resulta
y = c1eαxeiβx + c2e
αxe−iβx = eαx(c1e
iβx − c2e−βx
)=
= eαx[c1(cosβx+ i senβx) + c2(cosβx− i senβx)
]= eαx
[(c1 + c2) cosβx+ i(c1 − c2) senβx
]. (3.179)
Luego, las funciones eαx cosβx, y eαx senβx, son soluciones linealmente independientes de la ecuaciondiferencial (3.153), en −∞ < x < ∞. Podemos definir a C1 = c1 + c2, y a C2 = (ic1 − ic2). ComoC1 y C2 son constantes arbitrarias, podemos escribir la solucion de la siguiente manera
y = eαx(C1 cosβx+ C2 senβx
)(3.180)
Esta representacion es mas util, ya que la solucion esta dada por funciones reales.
Ejemplo 4:
Resolver la ecuaciony′′ − 4y′ + 5y = 0. (3.181)
Solucion:
Suponiendo que la solucion de la ecuacion tiene la forma y = emx, sustituyendo en la ecuacion(3.181), tenemos que la ecuacion caracterıstica es
m2 − 4m+ 5 = 0. (3.182)
Haciendo uso de la formula para resolver ecuaciones cuadraticas, tenemos que las raıces son
m1,2 =42±√
16− 202
= 2± i. (3.183)
De aquı, identificamos a α = 2 y a β = 1. Entonces, la solucion general de la ecuacion (3.181), tienela forma
y(x) = e2x(c1 cosx+ c2 senx
). (3.184)

142 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Ejemplo 5:
Hallar la solucion general de la ecuacion diferencial
yIV + 2y′′ + y = 0. (3.185)
Solucion:
Su ecuacion caracterıstica es
m4 + 2m2 + 1 = 0, (m2 + 1)2 = 0. (3.186)
Las raıcesm = ±i, (3.187)
tienen multiplicidad 2. Entonces, las cuatro soluciones complejas las podemos escribir como
y1 = eix, y2 = e−ix, y3 = xeix, y4 = xe−ix. (3.188)
De las dos primeras soluciones, podemos escribir
c1 cosx+ c2 senx, (3.189)
y de las dos ultimas, tenemosc3x cosx+ c4x senx. (3.190)
De tal manera, que la solucion general estara dada por la expresion
y(x) = c1 cosx+ c2 senx+ c3x cosx+ c4x senx, (3.191)
la cual podemos escribir de la siguiente manera
y(x) = (c1 + c3x) cosx+ (c2 + c4x) senx. (3.192)
3.5. Ecuaciones Diferenciales Lineales no Homogeneas deSegundo Orden
Toda ecuacion diferencial lineal no homogenea de segundo orden con coeficientes constantes tienela forma
ay′′ + by′ + cy = f(x) (3.193)
donde a, b y c son ciertas constantes dadas. El metodo para resolver este tipo de ecuaciones es elsiguiente:
Primero. Hallar la solucion correspondiente a la ecuacion homogenea
ay′′ + by′ + cy = 0 (3.194)
obtenida de le ecuacion original (3.193), (cuando f(x) = 0), la cual representaremos como yh ytendra la forma yh(x) = c1y1(x) + c2y2(x).

3.5. ECUACIONES DIFERENCIALES LINEALES NO HOMOGENEAS DESEGUNDO ORDEN143
Segundo. Encontrar una solucion particular representada por yp, correspondiente a la parte nohomogenea de la ecuacion original (3.193).
Tercero. La solucion general de la ecuacion original (3.193), sera la suma de estas dos soluciones,es decir
y(x) = yh(x) + yp(x) = c1y1(x) + c2y2(x) + yp(x) (3.195)
En esta seccion usaremos el metodo de coeficientes indeterminados para resolver las ecuacioneslineales no homogeneas. Debemos tener en cuenta que este metodo no esta limitado a ecuaciones desegundo orden, pero sı se limita a ecuaciones lineales no homogeneas con las siguientes caracterısticas:
Que tengan coeficientes constantes.
Que la funcion f(x) sea una constante k, una funcion exponencial eαx, una funcion algebraica,funciones senβx, cosβx o sumas y productos de estas.
Este metodo no es aplicable a funciones que tengan la forma f(x) = lnx, f(x) = 1x , f(x) =
tanx, etc,...
A continuacion damos una tabla en la cual, para una funcion f(x) dada, se tiene una funcion par-ticular yp(x). Esto ayudara al estudiante a tomar una solucion particular adecuada. La solucionparticular propuesta debera ser sustituıda en la ecuacion diferencial dada y ası encontrar los coefi-cientes A,B,C,D,E, F, , ,.
f(x) yp
5 Ax Ax+B
3x2 − 2 Ax2 +Bx+ Cx3 − x− 1 Ax3 +Bx2 + Cx+D
sen 2x A cos 2x+B sen 2xcos 4x A cos 4x+B sen 4xe4x Ae4x
(8x− 2)e4x (Ax+B)e4x
x2e2x (Ax2 +Bx+ C)e2x
e2x sen 2x e2x(A cos 2x+B sen 2x)2x2 sen 3x (Ax2 +Bx+ C) cos 3x+ (Dx2 + Ex+ F ) sen 4xxe2x cos 3x (Ax+B)e2x cos 3x+ (Cx+D)e2x sen 3x
Ejemplo 1:
Hallar la solucion general de la ecuacion diferencial
y′′′ − y′′ + y′ − y = x2 + x. (3.196)
Solucion:
Antes que nada, debemos resolver la ecuacion homogenea correspondiente a la ecuacion dada,esto es
y′′′ − y′′ + y′ − y = 0. (3.197)

144 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sabemos que la solucion es de la forma
y(x) = emx, (3.198)
donde m es un cierto parametro a determinar. Tomando la primera, segunda y tercera derivada dela funcion (3.198), y sustituyendo en la ecuacion (3.197), tenemos la ecuacion caracterıstica
m3 −m2 +m− 1 = 0. (3.199)
Las raıces de la ecuacion caracterıstica son
m = 1, m2 = −i, m3 = i. (3.200)
Por lo tanto, la solucion general de la ecuacion homogenea (3.197), es
yh = c1ex + c2 cosx+ c3 senx. (3.201)
Nos queda por hallar una solucion particular de la ecuacion (3.196). Debido a la forma que tiene lafuncion f(x) = x2 + x, supongamos la solucion particular(segun la tabla anterior)
yp(x) = Ax2 +Bx+ C, (3.202)
donde A,B y C son ciertos numeros que debemos encontrar. Una vez sustituıda la solucion propuesta(3.202), en (3.196), tenemos
−Ax2 + (2A−B)x+ (B − 2A− C) = x2 + x. (3.203)
De aquı, obtenemos el siguiente sistema de ecuaciones
A = −12A−B = 1 (3.204)
B − 2A− C = 0. (3.205)
Resolviendo este sistema, encontramos los valores para las constantes A,B y C, estos son
A = −1, B = −3, C = −1. (3.206)
Entonces, sustituyendo los valores de las constantes A,B y C, en (3.202), obtenemos la solucionparticular
yp(x) = −x2 − 3x− 1. (3.207)
La solucion general de la ecuacion (3.196), tiene la forma final
y(x) = yh(x) + yp(x) = c1ex + c2 cosx+ c3 senx− x2 − 3x− 1. (3.208)
Ejemplo 2:
Resolver la ecuaciony′′ + y′ − 2y = 3xex. (3.209)
Solucion:
La ecuacion homogenea correspondiente es
y′′ + y′ − 2y = 0. (3.210)

3.5. ECUACIONES DIFERENCIALES LINEALES NO HOMOGENEAS DESEGUNDO ORDEN145
Luego, suponemos la solucion y = emx y sustituyendo en (3.210), obtenemos su correspondienteecuacion caracterıstica
m2 +m− 2 = 0 → (m+ 2)(m− 1) = 0, (3.211)
la cual tiene como raıcesm1 = −2, m2 = 1. (3.212)
Entonces, la solucion de la ecuacion (3.210), tiene la forma
yh = c1e−2x + c2e
x. (3.213)
Ahora debemos buscar una solucion particular de la ecuacion original (3.209). Para esto, segun latabla de soluciones propuestas, una solucion particular serıa
yp = (Ax+B)ex = Axex +Bex. (3.214)
Si proponemos esta solucion particular, al sustituirla en (3.209), nos encontraremos con una inconsis-tencia. Esto se debe a que el segundo termino de la solucion particular (3.214), Bex ya esta incluidoen la solucion homogenea (3.213), c2ex, (estos dos terminos son iguales, ya que c2 y B son constantesarbitrarias). Para resolver esta inconsistencia se multiplica la solucion particular propuesta (3.214),por una x. Entonces, la solucion particular que debemos proponer sera
yp = x(Ax+B)ex = Ax2ex +Bxex. (3.215)
Derivando dos veces esta solucion, resulta
y′p = (2A+ 2B)xex +Ax2ex, y′′p = (2A+ 2B)ex + (4A+B)xex + 2Ax2ex. (3.216)
Sustituyendo en (3.209), obtenemos el sistema de ecuaciones
2A+ 3B = 0,6A = 3. (3.217)
Resolviendo este sistema, hallamos los valores para A y B, estos son
A =12, B = −1
3. (3.218)
Luego, poniendo estos valores en (3.215), tenemos que la solucion particular es
yp =12x2ex − 1
3xex. (3.219)
Finalmente, la solucion general de la ecuacion (3.209), tiene la siguiente forma
y(x) = c1e−2x + c2e
x +12x2ex − 1
3xex. (3.220)
Ejemplo 3:
Hallar la solucion general de la ecuacion
y′′ − 3y′ + 2y = x cosx. (3.221)
Solucion:

146 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
La ecuacion homogenea esy′′ − 3y′ + 2y = 0. (3.222)
Las raıces de esta ecuacion son
m2 − 3m+ 2 = 0 → (m− 2)(m− 1) = 0 → m1 = 2, m2 = 1. (3.223)
Entonces, la solucion de la ecuacion homogenea es
yh = c1e2x + c2e
x. (3.224)
Luego, de la tabla antes vista, podemos proponer la solucion
yp = (Ax+B) cosx+ (Cx+D) senx. (3.225)
Sustituyendo en la ecuacion (3.221), obtenemos el siguiente sistema de ecuaciones
3A+ C = 0,3B − 3C − 2A+D = 0,
−3A+B + 2C − 3D = 0,A− 3C = 1. (3.226)
Resolviendo el sistema, resulta
A =110, B = − 3
25, C = − 3
10, D = −17
50. (3.227)
Poniendo los valores de A,B,C y D en (3.225), tenemos que la solucion particular tiene la forma
yp =( 1
10x− 3
25
)cosx+
(− 3
10x− 17
50
)senx. (3.228)
Finalmente, tenemos que la solucion general de (3.221), es
y(x) = c1e2x + c2e
x +( 1
10x− 3
25
)cosx+
(− 3
10x− 17
50
)senx. (3.229)
Ejemplo 4:
Encontrar la solucion particular de la ecuacion diferencial
y′′ − 8y′ + 16y = (1− x)e4x. (3.230)
Solucion:
La ecuacion homogenea correspondiente es
y′′ − 8y′ + 16y = 0. (3.231)
Suponiendo la solucion y = emx, tenemos la ecuacion caracterıstica y sus correspondientes raıces
m2 − 8m+ 16 = 0 → (m− 4)(m− 4) = 0 → m = 4. (3.232)
Entonces, tenemos solo una solucion y1 = e4x. Sabemos que en tal caso, la segunda solucion li-nealmente independiente tendra la forma y2 = xe4x. Entonces, la solucion general de la ecuacionhomogenea (3.231), es
yh = c1e4x + c2xe
4x. (3.233)

3.5. ECUACIONES DIFERENCIALES LINEALES NO HOMOGENEAS DESEGUNDO ORDEN147
El siguiente paso es proponer una solucion particular y sustituirla en (3.230). Segun la forma de laparte derecha de (3.230), podemos proponer la solucion yp = (Ax + B)e4x. Sin embargo, estas dossoluciones estan ya incluidas en la solucion homogenea. Entonces, multiplicamos por x y obtenemos
yp = x(Ax+B)e4x. (3.234)
Si sustituimos esta solucion en la ecuacion (3.230), nos daremos cuenta que no es suficiente, ya queobtendremos A = 1/2, y xe4x = 0, lo cual es inconsistente, ya que suponemos que x 6= 0. Entonces,multipliquemos la expresion (3.234) nuevamente por x, y obtenemos
yp = x2(Ax+B)e4x. (3.235)
Derivando una y otra vez esta expresion, resulta
y′p = Ax2e4x + 2x(Ax+B)e4x + 4x2(Ax+B)e4x,
y′′ = 2(Ax+B)e4x + 4Axe4x + 16x(Ax+B)e4x + 16x2(Ax+B)e4x. (3.236)
Poniendo estos resultados en (3.230), obtenemos
(2B + 6Ax)e4x = (1− x)e4x. (3.237)
Para que esta relacion se cumpla, debemos tener
2B = 1,6A = −1. (3.238)
De donde es facil obtener los valores de A y B, estos son A = −1/6, y B = 1/2. Entonces, la solucionparticular tiene la forma
yp = x2(1
2− x
6
)e4x. (3.239)
Concluimos que la solucion general de (3.230), es
y(x) = c1e4x + c2xe
4x + x2(1
2− x
6
)e4x. (3.240)
Ejemplo 5:
Resolver la ecuaciony′′ − 6y′ + 13y = x2e3x − 3 cos 2x. (3.241)
Solucion:
Tenemos que la parte homogenea es
y′′ − 6y′ + 13y = 0. (3.242)
Luego, la ecuacion caracterıstica de (3.242), esta dada por
m2 − 6m+ 13 = 0 → m1,2 =62±
√36− 4(13)
2= 3± 2i. (3.243)
Entonces, la solucion general de la ecuacion homogenea (3.242), tiene la forma
yh = e3x(c1 cos 2x+ c2 sen 2x). (3.244)

148 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Ahora, propongamos una solucion particular de (3.241). La parte derecha de la ecuacion (3.241),consta de dos terminos, entonces, propongamos una solucion particular yp1 para x2e3x, y yp2 para−3 cos 2x. Obviamente, yp = yp1 + yp2 . Es facil ver que una solucion particular podrıa ser
yp = (Ax2 +Bx+ C)e3x +D cos 2x+ E sen 2x. (3.245)
Derivando una y otra vez, resulta
y′p = (2Ax+B)e3x + 3(Ax2 +Bx+ C)e3x − 2D sen 2x+ 2E cos 2x,
y′′ = 2Ae3x + 6(2Ax+B)e3x + 9(Ax2 +Bx+ C)e3x − 4D cos 2x− 4E sen 2x. (3.246)
Poniendo estos resultados en la ecuacion (3.241), obtenemos el sistema de ecuaciones
B = 02A+ 4C = 0
4A = 1,12D + 9E = 0,9D − 12E = 0. (3.247)
Al resolver este sistema hallamos los valores de los coeficientes, estos son; A = 1/4, B = 0, C =−1/8, D = −3/25 y E = 4/25. Sustituyendo estos valores en (3.245), tenemos que la solucionparticular de (3.241), es
yp =(x2
4− 1
8
)e3x − 3
25cos 2x+
425
sen 2x. (3.248)
Por ultimo, construimos la solucion general de (3.241), como la suma de la yh y la yp, esto nos dael resultado final
y(x) = e3x(c1 cos 2x+ c2 sen 2x) +(x2
4− 1
8
)e3x − 3
25cos 2x+
425
sen 2x. (3.249)
3.6. Variacion del Parametro
Ahora analizaremos un caso mas general que el anterior. Es decir, vamos a estudiar el metodo conel cual podremos resolver ecuaciones diferenciales lineales no homogeneas sin restringir a la funcionf(x) (la unica condicion es que f(x) sea continua en algun intervalo), a este nuevo metodo se leconoce como variacion del parametros . En este caso no vamos a deducir las formulas que se utilizanen el metodo, ya que, en principio, los pasos a seguir son mas faciles.
Sea dada la ecuacion diferencial lineal no homogenea en la forma estandar, es decir
y′′ + P (x)y′ +Q(x)y = f(x) (3.250)
donde se supone que P (x), Q(x) y f(x) son funciones continuas en el intervalo [a, b]. Sean y1 y y2 lasdos soluciones linealmente independientes, correspondientes a la ecuacion homogenea yh, obtenidade (3.250),
y′′1 + P (x)y′1 +Q(x)y1 = 0, y′′2 + P (x)y′2 +Q(x)y2 = 0. (3.251)

3.6. VARIACION DEL PARAMETRO 149
Ahora nos hacemos la pregunta: Sera posible hallar dos funciones u1 y u2 tales que la expresion
yp(x) = u1(x)y1(x) + u2(x)y2(x) (3.252)
sea una solucion particular de (3.250)?. La respuesta es sı. Los pasos son los siguientes:
Encontrar la solucion general de la ecuacion homogenea correspondiente a la ecuacion (3.250),esto es
y′′ + P (x)y′ +Q(x)y = 0 (3.253)
De aquı, obtenemos la solucion
yh(x) = c1y1 + c2y2 (3.254)
Identificamos y1 y y2, y formamos el Wronskiano de estas funciones, esto es
W = det(y1 y2y′1 y′2
)(3.255)
Encontrar las funciones u1 y u2, segun las formulas
u′1 = W1W , u′2 = W2
W(3.256)
donde W1 y W2 estan dadas por las siguientes formulas
W1 = det(
0 y2f(x) y′2
), W2 = det
(y1 0y′1 f(x)
)(3.257)
Formar la solucion particular segun la expresion (3.252),
yp(x) = u1(x)y1(x) + u2(x)y2(x) (3.258)
donde u1(x) y u2(x) son las funciones encontradas al integrar las expresiones (3.256).
Finalmente, la solucion general de la ecuacion original (3.250), tiene la forma
y(x) = yh(x) + yp(x) = c1y1(x) + c2y2(x) + u1(x)y1(x) + u2(x)y2(x) (3.259)

150 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Ejemplo 1:
Hallar la solucion general de la ecuacion
y′′ + 2y′ + y =e−x
x+ 1. (3.260)
Solucion:
La ecuacion homogenea correspondientes es
y′′ + 2y′ + y = 0. (3.261)
Su ecuacion caracterıstica
m2 + 2m+ 1 = 0 → (m+ 1)(m+ 1) = 0 → m = −1. (3.262)
La solucion general de la ecuacion (3.261), tiene la forma
yh = c1e−x + c2xe
−x. (3.263)
De esta ecuacion identificamos las funciones y1 = e−x y y2 = xe−x. Ahora, con estas funcionesformamos el determinante(Wronskiano),
W = det(e−x xe−x
−e−x e−x − xe−x
)= e−x(e−x − xe−x) + xe−2x = e−2x. (3.264)
Para W1 y W2, tenemos
W1 = det(
0 xe−x
e−x
x+1 e−x − xe−x
)= −xe
−2x
x+ 1, W2 = det
(e−x 0−e−x e−x
x+1
)=
e−2x
x+ 1. (3.265)
Luego, de las formulas (3.256), encontramos las funciones u1 y u2. Para u1, tenemos
u1 =∫W1
Wdx =
∫ (− xe−2x
x+ 1
)( 1e−2x
)dx = −
∫ ( x
x+ 1
)dx =
∫ (x+ 1− 1x+ 1
)= −
∫ (1− 1
x+ 1
)dx = −x+ ln |x+ 1|. (3.266)
y para u2, resulta
u2 =∫W2
Wdx =
∫ ( e−2x
x+ 1
)( 1e−2x
)dx =
∫dx
x+ 1= ln |x+ 1|. (3.267)
Sustituyendo los valores de u1, u2, y1 y y2 en la formula (3.258), tenemos que la solucion particularyp(x), es
yp = (−x+ ln |x+ 1|)e−x + xe−x ln |x+ 1|. (3.268)
Entonces, la solucion general de la ecuacion (3.260), es
y(x) = c1e−x + c2xe
−x − xe−x + e−x(x+ 1) ln |x+ 1|. (3.269)
Los terminos c2xe−x−xe−x = (c2−1)xe−x, los podemos escribir simplemente como c2xe−x, entoncesla solucion general(equivalente), es
y(x) = c1e−x + c2xe
−x + e−x(x+ 1) ln |x+ 1|. (3.270)

3.6. VARIACION DEL PARAMETRO 151
Ejemplo 2:
Resolver la ecuaciony′′ + y =
1senx
. (3.271)
Solucion:
Antes que nada, debemos hallar la solucion a la ecuacion homogenea obtenida de (3.271). Tenemos
y′′ + y = 0. (3.272)
La ecuacion caracterıstica asociada a esta ecuacion tiene la forma
m2 + 1 = 0. (3.273)
Las raıces son complejas conjugadas, es decir, tienen la forma m1 = i y m2 = −i. Entonces, lasolucion general de la ecuacion (3.272), es
yh = c1 cosx+ c2 senx, (3.274)
donde c1 y c2 son constantes de integracion. Ahora bien, identificamos las funciones y1 = cosx yy2 = senx, y calculamos el Wronskiano
W = det(
cosx senx− senx cosx
)= cos2 x+ sen2 x = 1. (3.275)
Ahora, debemos encontrar las funciones W1 y W2, segun las formulas (3.257),
W1 = det(
0 senx1
sen x cosx
)= −1, (3.276)
W2 = det(
cosx 0− senx 1
sen x
)=
cosxsenx
, (3.277)
Para encontrar las funciones u1 y u2 tenemos que integrar
u1(x) =∫W1
Wdx = −
∫dx = −x. (3.278)
y
u2(x) =∫W2
Wdx =
∫cosxsenx
dx =∫d(senx)senx
= ln | senx|. (3.279)
Entonces, la solucion particular tiene la forma
yp(x) = u1(x)y1(x) + u2(x)y2(x) = −x cosx+ ln | senx| senx. (3.280)
Finalmente, tenemos la solucion general de la ecuacion (3.271), la cual tiene la forma y(x) = yh(x)+yp(x), explıcitamente
y(x) = c1 cosx+ c2 senx− x cosx+ senx ln | senx|. (3.281)
Ejemplo 3:
Hallar la solucion general de la ecuacion
y′′ + 2y′ + y = xex +1xex
. (3.282)

152 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Solucion:
La ecuacion homogenea tiene la forma
y′′ + 2y′ + y = 0. (3.283)
La ecuacion caracterıstica es
m2 + 2m+ 1 = 0 → (m+ 1)(m+ 1) = 0 → m = −1. (3.284)
Entonces, la solucion general de la ecuacion homogenea es
yh = c1e−x + c2xe
−x. (3.285)
Luego, tenemos las soluciones y1 = e−x y y2 = xe−x, entonces, el Wronskiano, resulta ser
W = det(e−x xe−x
−e−x e−x − xe−x
)= e−2x − xe−2x + xe−2x = e−2x. (3.286)
Hallamos los Wronskianos W1 y W2 usando las formulas (3.257). Para W1 tenemos
W1 = det(
0 xe−x
xex + 1xex e−x − xe−x
)= xe−x
(xex +
1xex
)= −x2 − e−2x, (3.287)
y para W2
W2 = det(e−x 0−e−x xex + 1
xex
)= e−x
(xex +
1xex
)= x+
e−2x
x. (3.288)
Luego, de las formulas (3.256), tenemos para u1
u1 =∫W1
Wdx =
∫−x2 − e−2x
e−2xdx = −
∫x2e2xdx−
∫dx. (3.289)
Por separado vamos a calcular la integral∫x2e2xdx→
[u = x2, du = 2xdx, dv = e2xdx, v =
12e2x
]=x2
2e2x −
∫xe2xdx. (3.290)
Nuevamente se aplica integracion por partes para calcular la integral∫xe2xdx = (1/2)xe2x −
(1/4)e2x. Tomando este resultado en cuenta y sustituyendolo en (3.290), obtenemos∫x2e2xdx =
x2
2e2x − x
2e2x +
14e2x. (3.291)
Entonces, finalmente, tenemos el valor de u1, esto es
u1 =[− x2
2+x
2− 1
4
]e2x − x. (3.292)
Nos falta calcular la fucnion u2, tenemos
u2(x) =∫W2
Wdx =
∫ (x+
e−2x
x
)( 1e−2x
)dx =
∫ (xe2x +
1x
)dx =
12xe2x − 1
4e2x + ln |x|. (3.293)
De tal manera, que el valor de u2 es
u2 =12xe2x − 1
4e2x + ln |x|. (3.294)

3.7. ECUACIONES DE CAUCHY-EULER 153
Entonces, la solucion particular es
yp = u1(x)y1(x)+u2(x)y2(x) =([− x
2
2+x
2− 1
4
]e2x−x
)e−x+
(12xe2x− 1
4e2x+ln |x|
)xe−x. (3.295)
Haciendo un poco de algebra la expresion (3.295), se reduce a
yp =(x− 1)ex
4+ xe−x
(ln |x| − 1
). (3.296)
Finalmente, la solucion general de la ecuacion (3.282), tiene la forma
y(x) =(c1 + c2x+ x ln |x|
)e−x +
(x− 1)ex
4. (3.297)
En la solucion (3.297) hemos escrito a la constante c2 como c2 − 1, esto no altera el resultado.
3.7. Ecuaciones de Cauchy-Euler
Hasta el momento hemos considerado ecuaciones diferenciales lineales con coeficientes constantes,y fue relativamente facil encontrar sus soluciones. Sin embargo, en el caso en que los coeficientesson variables no es tan facil encontrar soluciones exactas. No obstante, existe un tipo de ecuacionescon coeficientes variables cuya solucion general se puede expresar en terminos de potencias de x,senos, cosenos, funciones logarıtmicas y exponenciales. A este tipo de ecuaciones se les conoce comoecuaciones diferenciales de Cauchy-Euler, y tienen la forma
anxn dny
dxn + an−1xn−1 dn−1y
dxn−1 +, ...,+a1xdydx + a0y = g(x) (3.298)
donde ai (i = 0, 1, 2, ..., n) son constantes. Podemos observar que la potencia de x coincide con elorden de la ecuacion diferencial. Analizaremos primero las ecuaciones de segundo orden homogeneascon coeficientes variables, es decir, las ecuaciones de la forma
ax2 d2ydx2 + bx dy
dx + cy = 0 (3.299)
Una vez conocida la solucion de la ecuacion homogenea es facil encontrar la solucion de la ecuacionno homogenea usando el metodo de variacion de parametros antes visto.
Sea dada la ecuacion diferencial de segundo orden
ax2y′′ + bxy′ + cy = 0 (3.300)
Busquemos una solucion de la forma
y = xm (3.301)
donde m es un numero a determinar, tenemos
dy
dx= mxm−1,
d2y
dx2= m(m− 1)xm−2. (3.302)

154 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Sustituyendo en la ecuacion (3.300),
am(m− 1)x2xm−2 + bmxxm−1 + cxm = 0. (3.303)
Factorizando [am(m− 1) + bm+ c
]xm = 0. (3.304)
Debido a que por definicion xm 6= 0, entonces para que la ecuacion se cumpla debera cumplirse larelacion
am2 + (b− a)m+ c = 0 (3.305)
que es la ecuacion caracterıstica de la ecuacion diferencial de Cauchy-Euler. Para esta existen trescasos de importancia:
Primer caso. Raıces reales y distintas. Es decir, m1 y m2 diferentes, en tal caso, tenemos quela solucion general es
y(x) = c1xm1 + c2x
m2 (3.306)
Ejemplo 1:
Hallar la solucion general de la ecuacion
x2y′′ − 4xy′ + 6y = 0. (3.307)
Solucion:
Supongamos que la solucion es del tipo
y(x) = xm (3.308)
Sustituyendo (3.308) en (3.307), tenemos
m2 − 5m+ 6 = 0. (3.309)
Las raıces de la ecuacion (3.309), son faciles de obtener, estas son
m1 = 3, m2 = 2. (3.310)
La solucion general de la ecuacion (3.307), es
y(x) = c1x3 + c2x
2. (3.311)
Segundo caso. Raıces reales e iguales. Esto es, m1 = m2 = m. En tal caso solo tendremos unasolucion que sera y = xm. Para que esto suceda el discriminante de la ecuacion cuadratica (3.305),debera ser igual a cero, de donde encontramos que m = − (b−a)
2a . Entonces, podemos formar unasegunda solucion linealmente independiente. Para esto escribamos la ecuacion de Cauchy-Euler enla forma estandar, esto es
d2ydx2 + b
axdydx + c
ax2 = 0 (3.312)

3.7. ECUACIONES DE CAUCHY-EULER 155
Entonces, usamos la formula (6.11),
y2 = y1
∫e−
∫p(x)dx
y21
dx = y1
∫e−
ba
∫dxx
x2mdx = y1
∫e−
ba ln x
x2mdx
= y1
∫x−
bax−2mdx = y1
∫x−
bax
b−aa dx = y1
∫dx
x= y1 lnx. (3.313)
La solucion general tiene la forma
y(x) = c1xm + c2x
m lnx (3.314)
En general, cuando aparece una raız real m = a en la ecuacion caracterıstica con multiplicidad r,entonces la ecuacion de Cauchy-Euler tiene como soluciones
y = xa, y = xa lnx, y = xa(lnx)2, ..., y = xa(lnx)r−1. (3.315)
Ejemplo 2:
Sea la ecuacion diferencial de Cauchy-Euler
8x3y′′′ + 12x2y′′ + 12xy′ − y = 0. (3.316)
Solucion:
Segun el metodo antes visto, debemos suponer la solucion
y = xm. (3.317)
Sustituyendo la solucion propuesta en (3.316), tenemos la ecuacion caracterıstica
8m(m− 1)(m− 2) + 12m(m− 1) + 2m− 1 = 0, (3.318)
la cual podemos escribir de la siguiente manera
(8m− 4)m(m− 1) + 2m− 1 = 0. (3.319)
Factorizando, resulta(2m− 1)[4m(m− 1) + 1] = 0. (3.320)
Esta misma expresion la podemos escribir de la siguiente manera
(2m− 1)(4m2 − 4m+ 1) = 0. (3.321)
Finalmente, tenemos(2m− 1)3 = 0. (3.322)
De donde es facil ver que tenemos la raız m = 1/2 de multiplicidad 3. Cada repeticion de una raızcorresponde a un factor adicional lnx en la solucion. De esta manera, obtenemos tres solucioneslinealmente independientes que satisfacen la ecuacion (3.316). Estas soluciones tienen la forma
y =√x, y =
√x lnx, y =
√x(lnx)2. (3.323)
La solucion general de la ecuacion (3.316), estara dada por la combinacion lineal de estas tresfunciones, es decir
y(x) = c1√x+ c2
√x lnx+ c3
√x(lnx)2. (3.324)

156 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Tercer caso. Raıces complejas conjugadas. Es decir
m1 = α+ iβ, m2 = α− iβ, (3.325)
donde α y β son ciertos numeros reales. La solucion general de la ecuacion (3.299), en tal caso es
y(x) = c1xα+iβ + c2x
α−iβ (3.326)
Haciendo
xiβ =(eln x
)iβ
= eiβ ln x = cos(β lnx) + i sen(β lnx), (3.327)
donde hemos aplicado la formula de Euler. Sustituyendo en la ecuacion (3.326), obtenemos
y(x) = C1xα+iβ + C2x
α−iβ = xα(C1x
iβ + C2x−iβ
)=
= xα[C1
(cos(β lnx) + i sen(β lnx)
)+ C2
(cos(β lnx)− i sen(β lnx)
)]=
= xα[(C1 + C2) cos(β lnx) + (iC1 − iC2) sen(β lnx)
]. (3.328)
En el intervalo x > 0, las funciones xα cos(β lnx) y xα sen(β lnx) son soluciones linealmente inde-pendientes de la ecuacion diferencial (3.300). Podemos redefinir las constantes como; c1 = C1 + C2
y c2 = iC1 − iC2, entonces, tenemos
y(x) = xα[c1 cos(β lnx) + c2 sen(β lnx)
](3.329)
Ejemplo 3:
Resolver la ecuacionx2y′′ + xy′ + 4y = 0. (3.330)
Solucion:
Suponemos la solucion y = xm, sustituyendo en la ecuacion (3.330), obtenemos la ecuacioncaracterıstica
m2 + 4 = 0 → m1 = 2i, m2 = −2i. (3.331)
En este caso tenemos que las raıces son complejas conjugadas. Identificamos a α = 0 y β = 2.Entonces haciendo uso de la formula (3.329), tenemos que la solucion general de la ecuacion (3.330),tiene la forma
yh(x) = c1 cos (2 ln |x|) + c2 sen (2 ln |x|). (3.332)
Ahora estudiaremos las ecuaciones de Cauchy-Euler no homogeneas. Para estas ecuaciones son vali-dos los metodos antes vistos: coeficientes indeterminados y variacion de parametros.
Ejemplo 4:
Hallar la solucion general de la ecuacion
x2y′′ − xy′ + y = 8x3. (3.333)
Solucion:

3.7. ECUACIONES DE CAUCHY-EULER 157
La ecuacion homogenea correspondiente a (3.333), es
x2y′′ − xy′ + y = 0. (3.334)
Suponemos la soluciony(x) = xm. (3.335)
Sustituyendo (3.335), en la ecuacion homogenea (3.334), tenemos
m2 − 2m+ 1 = 0 → (m− 1)(m− 1) = 0 (3.336)
De (3.336), concluımos que solo hay una solucion m = 1, para la ecuacion homogenea (3.334). Peroya sabemos que dada una solucion de una ecuacion diferencial lineal, siempre podemos construir unasegunda solucion linealmente independiente. De tal manera que, la solucion general de la ecuacionhomogenea (3.334), tiene la forma
yh(x) = c1x+ c2x ln |x|. (3.337)
Ahora debemos proponer una solucion particular de la ecuacion no homogenea (3.333). Debido ala estructura de la funcion f(x) = 8x3, podemos usar el metodo de los coeficientes indeterminados.Supongamos que la solucion particular de (3.333), tiene la forma
yp(x) = Ax3 +Bx2 + Cx+D. (3.338)
Para sustituir en (3.333), hallemos las derivadas primera y segunda de (3.338),
y′p = 3Ax2 + 2Bx+ C, y′′p = 6Ax+ 2B. (3.339)
Sustituyendo (3.339), en la ecuacion (3.333),
x2(6Ax+ 2B)− x(3Ax2 + 2Bx+ C) +Ax3 +Bx2 + Cx+D = 8x3. (3.340)
Igualando los coeficientes de x, tenemos que los coeficientes indeterminados son A = 2 y B = 0,C = 0, D = 0. Poniendo el valor de los coeficientes en (3.338), tenemos la solucion particular
yp(x) = 2x3. (3.341)
La solucion general de la ecuacion (3.333), es
y(x) = x(c1 + c2 ln |x|) + 2x3. (3.342)
Ejemplo 5:
Resolver la ecuacion de Cauchy-Euler no homogenea
x2y′′ + 3xy′ − 3y = 5x2. (3.343)
Solucion:
Primero resolvemos la parte homogenea, es decir,
x2y′′ + 3xy′ − 3y = 0. (3.344)
Luego, suponemos la solucion y = xm. Sustituyendo en (3.344), obtenemos la ecuacion caracterısticay sus raıces
m2 + 2m− 3 = 0 → (m+ 3)(m− 1) = 0 → m1 = −3, m2 = 1. (3.345)

158 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Entonces, la solucion a la ecuacion (3.344), es
yh = c1x−3 + c2x. (3.346)
Ahora debemos resolver la parte no homogenea de la ecuacion (3.343). Para esta ecuacion podemosbuscar una solucion particular aplicando el metodo de los coeficientes indeterminados. Supongamoslas soluciones particulares
yp = Ax2 +Bx+ C → yp = Ax3 +Bx2 + Cx. (3.347)
Debemos tomar la segunda solucion, ya que como podemos ver, una de las soluciones(termino linealen x) de la primer ecuacion de (3.347), ya esta incluida en la solucion homogenea (3.346). Derivandouna y otra vez, resulta
y′p = 3Ax2 + 2Bx+ C, y′′p = 6Ax+ 2B. (3.348)
Poniendo estos resultados en (3.343), obtenemos
12Ax3 + 5Bx2 = 5x2. (3.349)
De dondeA = 0, B = 1. (3.350)
Entonces, la solucion particular esyp = x2. (3.351)
Finalmente, tenemos que la solucion general de la ecuacion (3.343), es
y(x) =c1x3
+ c2x+ x2. (3.352)
Ejemplo 6:
Resolver la ecuacion de Cauchy-Euler no homogenea
x2y′′ + 5xy′ + 3y = 8x lnx. (3.353)
Solucion:
Primero, resolvemos la ecuacion homogenea correspondiente a la ecuacion (3.353). Tenemos
x2y′′ + 5xy′ + 3y = 0. (3.354)
Supongamos la soluciony = xm. (3.355)
Derivando, resultay′ = mxm−1, y′′ = m(m− 1)xm−2. (3.356)
Sustituyendo en (3.354), tenemos la ecuacion caracterıstica y sus raıces, esto es
m2 + 4m+ 3 = 0 → (m+ 3)(m+ 1) = 0 → m1 = −3, m2 = −1. (3.357)
La solucion general de la ecuacion homogenea es
yh = c1x−3 + c2x
−1. (3.358)
Luego, con las funcionesy1 = x−3, y2 = x−1, (3.359)

3.7. ECUACIONES DE CAUCHY-EULER 159
formamos el Wronskiano
W = det(
x−3 x−1
−3x−4 −x−2
)= −x−5 + 3x−5 = 2x−5. (3.360)
Las funciones W1 y W2 se calculan segun las formulas (3.257),
W1 = det(
0 x−1
8 ln xx −x−2
)= −8 lnx
x2. (3.361)
y
W2 = det(
x−3 0−3x−4 8 ln x
x
)=
8 lnxx4
. (3.362)
Ahora, podemos calcular las funciones u1 y u2, integrando
u1(x) =∫W1
Wdx =
∫ (− 8 lnx
x2
)( 12x−5
)dx = −4
∫x3 lnxdx
→[u = lnx, du =
1xdx, dv = x3dx, v =
x4
4
]= −4
[x4
4lnx− 1
4
∫x4
xdx
]= −x4 lnx+
x4
4. (3.363)
y
u2(x) =∫W2
Wdx =
∫ (8 lnxx4
)( 12x−5
)dx = 4
∫x lnxdx
→[u = lnx, du =
1xdx, dv = xdx, v =
x2
2
]= 4
[x2
2lnx− 1
2
∫x2
xdx
]= 2x2 lnx− x2. (3.364)
Entonces, la solucion particular tiene la forma
yp(x) = u1y1 + u2y2 =(− x4 lnx+
x4
4
)x−3 +
(2x2 lnx− x2
)x−1 = x lnx− 3x
4. (3.365)
Luego, la solucion general de la ecuacion (3.353), es
y(x) = c1x−3 + c2x
−1 + x lnx− 3x4. (3.366)
Ejemplo 7:
Hallar la solucion general de la ecuacion no homogenea de Cauchy-Euler
x2y′′ − xy′ + 2y = x lnx. (3.367)
Solucion:
La ecuacion homogenea correspondientes es
x2y′′ − xy′ + 2y = 0. (3.368)
Supongamos la solucion y = xm, derivando y sustituyendo en (3.368), obtenemos la ecuacion carac-terıstica
m(m− 1)−m+ 2 = 0 → m2 − 2m+ 2 = 0. (3.369)

160 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Las raıces de esta ecuacion son complejas conjugadas, m1 = 1+ i, y m2 = 1− i. Entonces, la solucionhomogenea es
yh = x[c1 cos(lnx) + c2 sen(lnx)
]. (3.370)
De esta ecuacion identificamos las funciones
y1 = x cos(lnx), y2 = x sen(lnx). (3.371)
Con estas funciones formamos el Wronskiano
W = det(
x cos(lnx) x sen(lnx)cos(lnx)− sen(lnx) sen(lnx) + cos(lnx)
)= x. (3.372)
Luego, encontramos las funciones W1 segun las formulas (3.257),
W1 = det(
0 x sen(lnx)ln xx sen(lnx) + cos(lnx)
)= − lnx sen(lnx). (3.373)
y W2,
W2 = det(
x cos(lnx) 0cos(lnx)− sen(lnx) ln x
x
)= lnx cos(lnx). (3.374)
Despues, con ayuda de las formulas (3.256), calculamos las funciones u1 y u2, esto es
u1(x) =∫W1
Wdx = −
∫lnx sen(lnx)
xdx = −
∫lnx sen(lnx)d(lnx) →
[t = lnx
]= −
∫t sen tdt =→
[u = t, du = dt, dv = sen tdt, v = cos t
]= −t cos t+
∫cos tdt
= −t cos t+ sen t = lnx cos(lnx)− sen(lnx). (3.375)
La integral para u2(x) se calcula de la misma manera que (3.375), y el resultado es
u2(x) =∫W2
Wdx =
∫lnx cos(lnx)
xdx =
∫lnx cos(lnx)d(lnx) = lnx sen(lnx)+cos(lnx). (3.376)
Luego, la solucion particular esta dada por
yp(x) = u1(x)y1(x) + u2(x)y2(x) = x cos(lnx)[lnx cos(lnx)− sen(lnx)
]+
+ x sen(lnx)[lnx sen(lnx) + cos(lnx)
]= x lnx. (3.377)
Entonces, la solucion general de la ecuacion (3.367), es
y(x) = yh + yp = x[c1 cos(lnx) + c2 sen(lnx)
]+ x lnx. (3.378)
Ejemplo 8:
Resolver la siguiente ecuacion
(x+ 2)2y′′ + 3(x+ 2)y′ − 3y = 0. (3.379)
Solucion:
Hagamos la sustituciont = x+ 2 → dt = dx, (3.380)

3.7. ECUACIONES DE CAUCHY-EULER 161
entonces, la ecuacion se reduce a una ecuacion donde la variable independiente es t y no x, esto es
t2d2y
dt2+ 3t
dy
dt− 3y(t) = 0. (3.381)
Luego, suponemos la soluciony(t) = tm. (3.382)
Sustituyendo, obtenemos la ecuacion caracterıstica y sus raıces
m(m− 1) + 3m− 3 = 0 → (m+ 3)(m− 1) → m1 = −3, m2 = 1. (3.383)
Entonces, la solucion general de la ecuacion (3.381), es
y(t) = c1t−3 + c2t. (3.384)
Luego, regresamos a la variable x. Para esto sustituimos la expresion (3.380) en (3.384), y de estamanera obtenemos la solucion general de la ecuacion (3.379),
y(x) = c1(x+ 2)−3 + c2(x+ 2). (3.385)
Ejemplo 9:
Resolver la ecuacion(2x+ 1)2y′′ − 2(2x+ 1)y′ + 4y = 0. (3.386)
Solucion:
Hagamos la sustitucion
t = 2x+ 1 → dt = 2dx → dx =12dt. (3.387)
Entonces, la ecuacion (3.386), toma la forma
2t2y′′ − 4ty′ + 4y(t) = 0 → t2y′′ − 2ty′ + 2y(t) = 0. (3.388)
Luego, suponiendo la solucion y = tm y sustituyendo en (3.388), tenemos la ecuacion caracterısticay sus raıces
m(m− 1)− 2m+ 2 = 0 → m2 − 3m+ 2 = 0 → m1 = −1 m2 = −2. (3.389)
Hemos obtenido solo una raız con multiplicidad dos (es decir, dos raıces reales e iguales). Entonces,la solucion general de la ecuacion (3.388), es
y(t) = c1t−1 + c2t
−2. (3.390)
Para obtener la solucion de la ecuacion (3.386), es necesario cambiar, en (3.390), la variable t por lavariable x segun la expresion (3.387). Finalmente, tenemos
y(x) = c1(2x+ 1)−1 + c2(2x+ 1)−2. (3.391)
Teorema 3.7.1. La ecuacion de Cauchy-Euler (3.299) puede transformarse en una ecuacion linealcon coeficientes constantes mediante la sustitucion x = et.

162 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
4 Sea la ecuacion de Cauchy-Euler (3.299),
ax2 d2ydx2 + bx dy
dx + cy = 0 (3.392)
Hagamos la sustitucion x = et. Como y es funcion de x y esta, a su vez, es funcion de t, tenemosque derivar usando la regla de la cadena, esto es
dy
dx=dy
dt
dt
dx. (3.393)
Luegox = et → t = lnx. (3.394)
Derivando a t respecto a x, para sustituir en la ecuacion (3.393), resulta
dt
dx=
1x
→ dt
dx=
1et
= e−t. (3.395)
Sustituyendo en la expresion (3.393),dy
dx=dy
dte−t. (3.396)
Aplicando una vez mas la regla de la cadena, obtenemos
d2y
dx2=
d
dt
(e−t dy
dt
) dtdx
= e−t d
dt
(e−t dy
dt
)= e−t
(− e−t dy
dt+ e−t d
2y
dt2
)= e−2t
(− dy
dt+d2y
dt2
). (3.397)
Sustituyendo estos resultados en la ecuacion (3.392), resulta
ae2te−2t(d2y
dt2− dy
dt
)+ bete−t dy
dt+ cy(t) = 0. (3.398)
De donde obtenemos la siguiente ecuacion
ad2ydt2 + (b− a)dy
dt + cy(t) = 0 4 (3.399)
Esta es una ecuacion diferencial lineal con coeficientes constantes, la cual puede ser resuelta suponien-do la solucion y(t) = emt. Luego, en la solucion general de (3.399), se sustituye t = lnx, para obtenerla solucion general de la ecuacion (3.392).
Ejemplo 10:
Aplicando la sustitucion x = et resolver la ecuacion de Cauchy-Euler
x2y′′ − xy′ + y = 0. (3.400)
Solucion:
Suponemos la sustitucion x = et, t = lnx. Entonces, de (3.399), tenemos la ecuacion lineal
d2y
dt2− 2
dy
dt+ y(t) = 0. (3.401)

3.8. VIBRACIONES MECANICAS 163
Luego, supongamos la solucion y = emt y sustituyendo en (3.401), obtenemos la ecuacion carac-terıstica y sus raıces
m2 − 2m+ 1 = 0 → (m− 1)2 = 0. (3.402)
Tenemos solo una raız de multiplicidad 2. Entonces, la solucion general de (3.401), es
y(t) = c1et + c2te
t. (3.403)
Finalmente, para obtener la solucion general de (3.400), basta con sustituir en (3.403), t = lnx, estoes
y(x) = c1eln x + c2 lnxeln x → y(x) = c1x+ c2x lnx. (3.404)
3.8. Vibraciones Mecanicas
El movimiento de un cuerpo de masa m sujeto a un resorte, sirve como ejemplo simple de lasvibraciones que ocurren en los sistemas mecanicos mas complejos. Muchos problemas de este tipose pueden modelar con ecuaciones diferenciales lineales no homogeneas con coeficientes constantesy, desde luego, ser resueltos con los metodos antes vistos.
Supongamos que tenemos un cuerpo de masa m sujeto a un extremo de un resorte que resiste,tanto a la compresion como al estiramiento, el otro extremo del resorte esta sujeto a un muro fijo,figura:. Supongamos, ademas, que el cuerpo descansa en una superficie plana sin friccion, de modoque el cuerpo solo puede moverse hacia atras y hacia adelante, cuando el resorte se estira o secomprime. Supongamos que x representa la distancia del cuerpo a la posicion de equilibrio(reposo).Fijemos nuestro sistema de referencia de tal modo que x > 0, cuando el resorte esta estirado yx < 0 cuando el resorte esta comprimido. Ahora, apliquemos las leyes de la fısica que han sidocomprobadas experimentalmente. En este caso, la ley de Hooke: Esta ley nos dice que, la fuerza queel resorte ejerce sobre un cuerpo de masa m es proporcional a la distancia a la que el resorte se haestirado o comprimido. A esta fuerza se le conoce como fuerza restauradora , ya que su funcion esllevar al cuerpo a su estado de equilibrio. Esta fuerza se representa como
Fr = −kx, (3.405)
donde k > 0, es la constante de proporcionalidad, la cual solo depende del material del que esta hechoel resorte. Fr < 0, cuando x > 0 y Fr > 0 cuando x < 0, figura (3.1).
Aplicando la segunda ley de Newton, tenemos
md2x
dt2= −kx, (3.406)
La ecuacion (3.406) se puede escribir como una ecuacion lineal homogenea de segundo orden, esdecir, de la siguiente manera
md2x
dt2+ kx = 0. (3.407)
Sabemos bien que el modelo anterior es bastante ideal, y que en el mundo real es difıcil encontrartales sistemas. En realidad, siempre existe una fuerza de amortiguamiento. Esta fuerza de amor-tiguamiento es muy aproximada a ser proporcional a la velocidad instantanea del cuerpo, es decir,
Fa = −β dxdt, (3.408)

164 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
Figura 3.1:
Figura 3.2:
donde β es la constante de proporcionalidad, la cual depende del medio que sirve de amortiguador(puede ser la friccion de la superficie o del aire), figura (3.2). Notese que las fuerzas Fr y Fa tienensigno negativo, esto es debido a que actuan en sentido contrario al del movimiento del cuerpo.
La ecuacion que describe el comportamiento del sistema de la figura (3.2) tiene, entonces, laforma
md2x
dt2+ β
dx
dt+ kx = 0. (3.409)
Si, ademas de las fuerzas Fr y Fa, el cuerpo esta sujeto a una fuerza externa dada por
Fe = F (t), (3.410)
entonces, la fuerza total que actua en el cuerpo esta dada por la suma de estas fuerzas, es decir,
F = Fr + Fa + Fe. (3.411)
En general, las fuerzas son vectoriales, pero aquı no es necesario representarlas como vectores, yaque por condiciones del problema estamos en una dimension.
Haciendo uso de la segunda ley de la dinamica de Newton, la cual nos dice que, la suma de todaslas fuerzas que actuan en un cuerpo es igual al producto de su masa por la aceleracion, es decir,
ΣNi Fi=1 = m
d2x
dt2. (3.412)
Entonces, tenemos
md2x
dt2= −β dx
dt− kx+ F (t). (3.413)

3.9. SOLUCION PARA EL MOVIMIENTO LIBRE NO AMORTIGUADO 165
Desde luego, esta ecuacion la podemos escribir de la siguiente manera
md2xdt2 + β dx
dt + kx = F (t) (3.414)
Como podemos ver, la ecuacion (3.414), es una ecuacion diferencial lineal no homogenea de segundoorden con coeficientes constantes. Esta ecuacion modela, en un alto grado de exactitud, el movimientodel cuerpo sujeto a una fuerza de amortiguamiento y a una fuerza externa.
Si no hay amortiguamiento, entonces, ponemos β = 0 y decimos que el movimiento es no amor-tiguado . El movimiento es amortiguado si β > 0. Si no hay fuerzas externas, esto es, si F (t) = 0,entonces, decimos que el movimiento es libre y diremos que es movimiento forzado si F (t) 6= 0.
Ası, la ecuacion homogenea
md2xdt2 + β dx
dt + kx = 0 (3.415)
describe el movimiento libre de un cuerpo de masa m sujeto a un resorte con amortiguamiento, perosin fuerzas externas.
3.9. Solucion para el Movimiento Libre no Amortiguado
Se llama movimiento libre no amortiguado a todo aquel que cumple la ecuacion diferencial
md2xdt2 + kx = 0 (3.416)
Notese que aquı hemos puesto β = F (t) = 0. Escribamos la ecuacion (3.416), de la siguiente manera
d2xdt2 + ω2
0x = 0 (3.417)
Donde, por comodidad, se ha introducido el parametro ω20 = k/m. La solucion de esta ecuacion la
buscamos de la formax(t) = eλt. (3.418)
En esta expresion hemos escrito λ en lugar del parametro m, esto es para no confundirse con lamasa m del cuerpo. Sustituyendo en (3.417), tenemos
λ2 + ω20 = 0 → λ = ±
√−ω2
0 = ±iω0. (3.419)
De donde, la solucion general de esta ecuacion es
x(t) = c1 cosω0t+ c2 senω0t. (3.420)
Este resultado lo podemos escribir de otra forma equivalente. Definamos a las constantes c1 y c2como
c1 = R cosφ c2 = R senφ. (3.421)

166 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
dondeR =
√c21 + c22, tg φ =
c2c1, φ = tg−1
(c2c1
). (3.422)
Sustituyendo (3.421), en (3.420), resulta
x(t) = R cosφ cosω0t+R senφ senω0t. (3.423)
Recordando la identidad trigonometrica
cosφ cosω0t+ senφ senω0t = cos(ω0t− φ) (3.424)
obtenemos el resultado final
x(t) = R cos(ω0t− φ) (3.425)
Observe que existe una relacion entre las constantes c1, c2 y las funciones senφ y cosφ. Esto es
cosφ =c1√c21 + c22
, senφ =c2√c21 + c22
. (3.426)
Existe un numero infinito de angulos φ, que difieren en multiplos enteros de 2π, que satisfacenlas ecuaciones (3.426). Usualmente se escoge a φ tal que −π ≤ φ < π. El movimiento descrito por(3.420), o por (3.425), se llama movimiento armonico simple . El movimiento tiene una periodicidad,con periodo
T = 2πω0
(3.427)
Este es el tiempo requerido para que el cuerpo complete un ciclo de ida y vuelta, u oscilacion. Alparametro R se le conoce como amplitud de la oscilacion . Al angulo φ se le da el nombre de angulode fase y se mide en radianes. Si t esta en segundos, entonces, ω0 esta dada en radianes sobre segundoy se le llama frecuencia propia del movimiento.
3.10. Soluciones Para las Oscilaciones Forzadasno Amortiguadas
En la naturaleza existen muchos fenomenos sometidos a fuerzas periodicas externas. Por ejemplo,los motores de helice de un avion causan perturbaciones periodicas en sus alas. Las perturbaciones,aunque sean pequenas en magnitud, pueden causar fracturas estructurales si tienen ciertas frecuen-cias crıticas. Veamos como esto sucede. Consideremos un sistema masa-resorte sin amortiguamientosometido a una fuerza externa
F (t) = F0 cos γ0t, (3.428)
donde F0 es una constante y γ0 es la frecuencia propia de la fuerza externa. En este caso la ecuacionque gobierna el movimiento tiene la forma
md2x
dt2+ kx = F (t). (3.429)
Esta misma ecuacion la podemos reescribir de la siguiente manera
d2xdt2 + ω2
0x = F0m cos γ0t (3.430)

3.10. SOLUCIONES PARA LAS OSCILACIONES FORZADAS NO AMORTIGUADAS 167
Donde hemos definido ω0 =√k/m. Ahora debemos resolver la ecuacion (3.430). Supongamos que
ω0 6= γ0. Ya sabemos que para resolver la ecuacion dada, primero debemos resolver la ecuacionhomogenea correspondiente, esto es
d2x
dt2+ ω2
0x = 0. (3.431)
La solucion homogenea esxh = c1 cosω0t+ c2 senω0t. (3.432)
Ahora busquemos una solucion particular a la ecuacion (3.430), sea
xp = A cos γ0t+B sen γ0t. (3.433)
Sustituyendo esta solucion en la ecuacion (3.430), con el objetivo de encontrar las constantes A yB, tenemos como resultado
(ω20 − γ2
0)(A cos γ0t+B sen γ0t) =F0
mcos γ0t. (3.434)
Esto se cumple, si y solo si
A =F0
m(ω20 − γ2
0), y B = 0. (3.435)
Entonces, la solucion particular tiene la forma
xp(t) =F0
m(ω20 − γ2
0)cos γ0t. (3.436)
Luego, la solucion general esta dada por la relacion
x(t) = c1 cosω0t+ c2 senω0t+F0
m(ω20 − γ2
0)cos γ0t. (3.437)
Ahora, supongamos que las condiciones iniciales son tales que
x(0) = 0, x′(0) = 0. (3.438)
Entonces, tenemos
c1 = − F0
m(ω20 − γ2
0), y c2 = 0. (3.439)
Sustituyendo en (3.437), tenemos
x(t) =F0
m(ω20 − γ2
0)(cos γ0t− cosω0t). (3.440)
Esta misma solucion la podemos escribir de una forma mas elegante y simple. Para esto, hagamosuso de las identidades trigonometricas
cos(α− β) = cosα cosβ + senα senβcos(α+ β) = cosα cosβ − senα senβ. (3.441)
Restando la segunda identidad de la primera resulta
cos(α− β)− cos(α+ β) = 2 senα senβ. (3.442)
Ahora identificandoγ0t = α− β, y ω0t = α+ β. (3.443)

168 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
De esta manera, tenemos
α =(ω0 + γ0)t
2, β =
(ω0 − γ0)t2
. (3.444)
Sustituyendo (3.444), y (3.443), en (3.442), tenemos
cos γ0t− cosω0t = 2 sen(ω0 − γ0)t
2sen
(ω0 + γ0)t2
. (3.445)
Esta relacion se sustituye en (3.440), y obtenemos
x = A(t) sen(ω0 + γ0)t
2. (3.446)
donde
A(t) =2F0
m(ω20 − γ2
0)sen
(ω0 − γ0)t2
. (3.447)
Los resultados en las expresiones (3.446), y (3.447), los podemos interpretar como una variacionsenoidal con frecuencia
(ω0 + γ0)2
. (3.448)
y amplitud variable A(t).
3.11. Circuito Electrico RLC
Supongamos que tenemos un circuito electrico formado por un resistor de resistencia R (ohms),un inductor de inductancia L (henrios) y un capacitor de capacitancia C (faradios), conectadosen serie a una fuente de fuerza electromotriz E(t) (voltios). Determinar la ecuacion diferencial quedescriba el comportamiento de la corriente I(t) (amperes) en el circuito.
Si el interruptor esta abierto, entonces, no pasa nada. Cuando el interruptor se cierra (encendi-do), las diferencias en el potencial electrico causan que fluya corriente en el circuito. La baterıa ogenerador en la figura (3.3) crea una diferencia de potencial electrico E(t) entre sus dos terminales,que etiquetamos arbitrariamente como positiva y negativa. Decimos que E(t) > 0 si el potencial enla terminal positiva es mayor que el potencial en la terminal negativa, E(t) < 0 si el potencial en laterminal positiva es menor que en la terminal negativa y E(t) = 0 si el potencial es el mismo en lasdos terminales. Usualmente a E(t) se le llama fuerza electromotriz.
Figura 3.3: Circuito RLC.
Para cualquier tiempo t dado, en cada uno de los puntos del circuito fluye la misma corrienteI(t), y decimos que I(t) > 0 si el flujo circula alrededor del circuito, de la terminal positiva de labaterıa o generador hacia la terminal negativa, I(t) < 0 es el flujo en el sentido opuesto, e I(t) = 0significa que no fluye corriente.

3.11. CIRCUITO ELECTRICO RLC 169
La ecuacion para la corriente I(t) se obtiene considerando las siguientes tres caıdas de voltaje
VL = LdI
dten el inductor.
VR = RI ley de Ohm.
VC =q
Cen el capacitor.
La ley de Kirchhoff nos dice que la suma de estas tres caıdas de voltaje debera ser igual a la fuerzaelectromotriz E(t). Matematicamente, para el circuito de la figura (3.3), esta ley se escribe como
LdI
dt+RI +
1Cq = E(t). (3.449)
Esta ecuacion contiene dos incognitas, la corriente I(t) en el circuito y la carga q(t) en el capacitor.
La corriente I(t) es la cantidad de carga que atraviesa una seccion transversal de un conductoren un tiempo t, esto es
I(t) =dq
dt. (3.450)
Si derivamos la expresion (3.449) respecto a t, y tomamos en cuenta la relacion (3.450), obtenemosla ecuacion diferencial para hallar la corriente I(t) en funcion del tiempo, esto es
Ld2Idt2 +R dI
dt + 1C I = dE
dt(3.451)
Esta ecuacion es de segundo orden lineal no homogenea y con coeficientes constantes.
Por otro lado, sustituyendo la expresion (3.450) en (3.449), obtenemos una ecuacion diferencialpara la carga q(t), la cual tiene la siguiente forma
Ld2qdt2 +R dq
dt + 1C q = E(t) (3.452)
Para hallar la corriente I(t) que fluye en un circuito RLC resolvemos la ecuacion (3.452) para q(t)y luego diferenciamos la solucion para obtener I(t).
Observacion:
Como podemos ver, las ecuaciones (3.452), y (3.451), desde el punto de vista matematico, tienenla misma estructura de la ecuacion (3.414)
md2x
dt2+ β
dx
dt+ kx = F (t), (3.453)
la cual representa a un sistema masa-resorte con una fuerza externa F (t). Entonces, es obvio quedebe haber una cierta analogıa entre las constantes de las ecuaciones. Esta analogıa la escribimosen la siguiente tabla:
Sistema Mecanico Sistema ElectricoMasa m Inductancia L
Constante de Amortiguamiento β Resistencia RConstante del Resorte k Capacitancia Recıproca 1/C
Posicion x Carga q o Corriente IFuerza F (t) Fuerza Electromotrız E(t)

170 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
3.12. Oscilaciones Libres del Circuito RLC
Un circuito RLC tiene oscilacion libre si E(t) = 0, para todo t > 0. Entonces, para las oscilacioneslibres de un circuito, figura (3.3) en que E(t) = 0, tenemos de (3.452), la ecuacion
Ld2q
dt2+R
dq
dt+
1Cq = 0. (3.454)
Esta ecuacion es lineal, homogenea con coeficientes constantes. La ecuacion caracterıstica correspon-dientes, es
Lm2 +Rm+1C
= 0. (3.455)
Las raıces de esta ecuacion caracterıstica son
m1 =−R+
√R2 − 4L/C2L
y m2 =R−
√R2 − 4L/C2L
(3.456)
Existen tres casos de interes:
Primer Caso: Si se cumple la relacion R2 < 4L/C, decimos que la oscilacion es subamortiguada.En tal caso, las raıces m1 y m2 son complejas conjugadas y tienen la forma
m1 = − R
2L+ iω1 y m2 = − R
2L− iω1 (3.457)
Donde
ω1 =
√4L/C −R2
2L(3.458)
La solucion general de la ecuacion de (3.454) es
q(t) = e−Rt/2L(c1 cosω1t+ c2 senω1t
)(3.459)
Esta misma solucion la podemos escribir en una forma diferente, pero equivalente
q(t) = Ae−Rt/2L cos (ω1t− φ), (3.460)
siempre y cuando
A =√c21 + c22, c1 = A cosφ, c2 = A senφ, φ = tg−1
(c2c1
). (3.461)
donde, A es la amplitud de las oscilaciones, ω la frecuencia y φ la fase.
Si suponemos que R = 0 (caso ideal), entonces, de la ecuacion (3.460), tenemos
q(t) = A cos( t√
LC− φ
). (3.462)
Este resultado es similar al movimiento armonico simple de un sistema masa-resorte no amortiguadoen vibracion libre. El caso del sistema subamortiguado es el mas interesante, ya que por lo generallos circuitos RLC pertenecen a estos sistemas.
Segundo caso: Si R2 > 4L/C tenemos la oscilacion sobreamortiguada. Esto significa que laresistencia en el circuito es dominante. En este caso las raıces m1 y m2 son reales y la soluciongeneral de la ecuacion (3.454) es
q(t) = c1em1t + c2e
m2t. (3.463)

3.13. SOLUCION GENERAL DEL CIRCUITO RLC 171
Tercer caso: Si R2 = 4L/C, decimos que la oscilacion es crıticamente amortiguada. En tal caso,las raıces son reales e iguales, m1 = m2 = m = −R/2L y la solucion general de (3.454), es
q(t) = e−Rt/2L(c1 + c2t
). (3.464)
Si R 6= 0, entonces los exponentes en las expresiones (3.460, 3.463, 3.464) son negativos, por con-siguiente la solucion general de cualquier problema homogeneo con valor inicial
Ld2q
dt2+R
dq
dt+q
C= 0, q(0) = q0, q′(0) = I0, (3.465)
tiende a cero, de manera exponencial cuando t → ∞. Entonces, las soluciones son solucionestransitorias. No habiendo fuente de energıa exterior (generador) y existiendo rozamiento electri-co”(resistencia con calor de Joule) el sistema termina estabilizandose: El condensador se descarga ydeja de pasar corriente. El regimen es siempre transitorio. Cuando hay oscilaciones existe transferen-cia de energıa del campo electrico en el condensador al campo magnetico en la bobina de inducciony viceversa.
3.13. Solucion General del Circuito RLC
Resolver el problema de valor inicial para la ecuacion (3.452). Tenemos
Ld2q
dt2+R
dq
dt+q
C= E(t), q(0) = q0, q′(0) = I0, (3.466)
donde q0 es la carga inicial en el capacitor e I0 es la corriente inicial en el circuito. De la seccionanterior, sabemos que para el caso E(t) = 0, todas las soluciones de (3.466) son transitorias. Porotro lado, si suponemos que E(t) 6= 0, entonces, la solucion general de (3.466) tendra la forma
q(t) = qh(t) + qp(t), (3.467)
donde qh(t) es la solucion de la ecuacion homogenea (E(t) = 0), y tiende de manera exponenciala cero cuando t → ∞, cualesquiera que sean las condiciones iniciales. qp(t) depende solo de E(t) yes independiente de las condiciones iniciales. A la solucion qp(t) se le conoce como carga del estadopermanente sobre el capacitor del circuito RLC.
Si derivamos, respecto al tiempo, la expresion (3.467), obtenemos
dq
dt=dqhdt
+dqpdt
(3.468)
Recordando que I = dq/dt, podemos escribir esta expresion de la siguiente manera
I(t) = Ih(t) + Ip(t) (3.469)
Entonces
Ih(t) =dqhdt
y Ip(t) =dqpdt, (3.470)
decimos que Ih(t) es la corriente transitoria y Ip(t) es la corriente de estado permanente. En lamayorıa de las aplicaciones solo nos interesamos por la carga y corriente del estado permanente, esdecir, nos interesa el comportamiento del sistema a largo plazo.

172 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
3.14. Aplicaciones
Problema 1:
Una masa de m = 3kg esta fija al extremo de un resorte que se estira 20cm. por una fuerza de15N. Es puesto en movimiento con la posicion inicial x0 = 0 y velocidad inicial v0 = 10m/s. Hallarla amplitud, el periodo y la frecuencia del movimiento.
Datos: m = 3kg, x0 = 0cm, x1 = 20cm, F = 15N, v0 = 10m/s.
Hallar: Amplitud A, periodo T y la frecuencia ω.
Solucion:
Problema 2:
Determinar el periodo y la frecuencia de un movimiento armonico simple de un objeto de masam = 4kg. colocado al extremo de un resorte cuya constante es de k = 16N/m.
Datos: m = 4kg, k = 16N/m.
Hallar: El periodo T y la frecuencia ω0.
Solucion:
La ecuacion del movimiento armonico simple esta dada por
d2x
dt2+ ω2
0x = 0, (3.471)
dondeω2
0 =k
m, (3.472)
y el periodo de las oscilaciones es
T =2πω0. (3.473)
Sustituyendo (3.473) en (3.472), tenemos
T = 2π√m
k. (3.474)
La solucion general del movimiento armonico simple esta dado por la exresion
x(t) = c1 cosω0t+ c2 senω0t. (3.475)
Sustituyendo el valor de la frecuencia (3.472) en (3.475), tenemos que la solucion general para elproblema dado, es
x(t) = c1 cos√m
kt+ c2 sen
√m
kt. (3.476)
Ejemplo 3:
Hallar la corriente de estado permanente de un circuito RLC si la fuerza electromotriz, propor-cionada por un generador de corriente alterna, es E(t) = E0 cosωt
Solucion: Primero vamos a calcular la carga q(t) del estado permanente en el capacitor como unasolucion particular de la ecuacion
Ld2q
dt2+R
dq
dt+q
C= E0 cosωt. (3.477)

3.14. APLICACIONES 173
Como nadamas nos interesa el estado permanente, entonces, buscamos una solucion particular de laecuacion (3.477), de la siguiente manera
qp(t) = A cosωt+B senωt. (3.478)
donde las constantes A y B las debemos determinar, para esto sustituimos en (3.477) y resulta elsistema de ecuaciones
−Aω2L+RBω +A
C= E0,
−Bω2L−RAω +B
C= 0. (3.479)
Problema:
Hallar la ley de movimiento de un cuerpo de masa m, lanzado verticalmente hacia arriba conuna velocidad inicial v0. Cual sera la maxima altura que el cuerpo alcanza?
Datos: v0, m.
Hallar: Ley de movimiento v = v(t), x = x(t) y altura maxima H.
Solucion:
Supongamos que la friccion debida al aire es tal que se puede despreciar. Entones, la unica fuerzaque actua en el cuerpo es su peso mg. Aplicando la segunda ley de Newton, resulta
md2x
dt2= −mg → d2x
dt2= −g, (3.480)
donde g es una constante, a decir, es la aceleracion de caıda libre g = 9,8m/s2. Para hallar la leyde movimiento del cuerpo, debemos integrar la segunda expresion de (3.480). Podemos reducir laecuacion de segundo orden (3.480), introduciendo v(t) = dx/dt que por definicion es la velocidaddel cuerpo.
dv
dt= −g. (3.481)
Ahora tenemos una ecuacion de primer orden. Integrando resulta∫dv = −g
∫dt → v(t) = −gt+ c1 (3.482)
De las condiciones iniciales, tenemosv0 = c1.
Entoncesv(t) = −gt+ v0. (3.483)
Luegodx
dt= −gt+ v0 →
∫dx =
∫(−gt+ v0)dt. (3.484)
Despues de integrar, obtenemos
x(t) = −gt2
2+ v0t+ c2. (3.485)
Para hallar la constante c2, suponemos que en t = 0, x(0) = 0, de (3.485), obtenemos que c2 = 0.Entonces, la ley de movimiento la podemos escribir como
v(t) = −gt+ v0, x(t) = −gt2
2+ v0t. (3.486)

174 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
En el punto donde el cuerpo alcanza la altura maxima su velocidad debera ser cero, entonces de laprimer ecuacion en (3.486), tenemos
0 = −gtmax + v0, tmax =v0g, (3.487)
donde tmax es el tiempo maximo, en el cual el cuerpo alcanza la altura maxima x(t)max = H.Sustituyendo el tmax en la segunda ecuacion en (3.486), tenemos
xmax(t) = −g2t2max + v0tmax → H = −g
2
(v0g
)2
+ v0v0g
= −v20
2g+v20
g=v20
2g. (3.488)
Entonces, la altura maxima alcanzada por el cuerpo sera
H =v20
2g. (3.489)
Esta expresion y las expresiones obtenidas en (3.486), son las soluciones al problema planteado.
Problema 2:
Determinar la mınima velocidad que se le debe aplicar a un cuerpo lanzado verticalmente haciaarriba para que este salga del campo de atraccion de la Tierra. Para simplificar, suponga que laresistencia del aire se puede despreciar.
Solucion:
Sean M y m las masas de la Tierra y del cuerpo que debera ser lanzado, respectıvamente. Segunla ley gravitacional, entre la Tierra y el cuerpo existe una fuerza de atraccion
F = GNMm
x2, (3.490)
donde la distancia x se mide del centro de la Tierra al centro de gravedad del cuerpo. En la superficieterrestre x = R, para t = 0 y v0 la velocidad inicial del cuerpo(que es la que deseamos encontrar).De la segunda ley de Newton, obtenemos la ecuacion diferencial que gobierna el movimiento, estatiene la forma
mdv
dt= −GN
mM
x2→ dv
dt= −GN
M
x2, (3.491)
donde GN es la constante gravitacional de Newton. Para integrar esta ecuacion, hagamos uso de laregla de la cadena, para convertir la ecuacion en variables separables, esto es
dv
dt=dv
dx
dx
dt= v
dv
dx. (3.492)
Sustituyendo este resultado en la segunda ecuacion de (3.491), e integrando∫vdv = −GNM
∫dx
x2→ v2
2=GNM
x+c12. (3.493)
La constante de integracion c1 la podemos hallar de las condiciones, para x = R la velocidad iniciales v = v0
v20
2=GN
MR+
c12
→ c1 = v20 −
2GNM
R. (3.494)
Sustituyendo el valor de c1 en la segunda expresion de (3.493), obtenemos
v2
2=GNM
x+v20
2− GNM
R. (3.495)

3.14. APLICACIONES 175
Segun la hipotesis, la velocidad v debera cumplir la relacion
v2
2≥ 0. (3.496)
La magnitudGNM
x→ 0 ⇐⇒ x→∞. (3.497)
se hace muy pequena conforme x aumenta. La condicion (3.496), se cumple para toda x solo si
v20
2− GNM
R≥ 0. (3.498)
De donde, obtenemos que la velocidad mınima con que debe ser lanzado el cuerpo es
v0 =
√2GNM
R. (3.499)
En la superficie de la Tierra, es decir, cuando x = R la magnitud de la aceleracion debida a la fuerzade gravedad se obtiene de la ecuacion (3.491),
g =GNM
R2. (3.500)
De donde podemos encontrar la masa M de la Tierra
M =gR2
GN. (3.501)
Sustituyendo este valor en (3.499), obtenemos el resultado final,
v0 =√
2gR =√
2 · 9,81 · 63 · 107 ≈ 11, 2 · 105cm/s = 11, 2 km/s. (3.502)
Con la velocidad de v0 = 11, 2 km/s debe ser lanzado un cuerpo de masa m para que no regrese ala Tierra. A esta velocidad mınima se le conoce como velocidad de escape .

176 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
3.15. Problemas de Repasodel Capıtulo 3:
En esta seccion de problemas tambien recomen-damos resolver todos los ejercicios, esto es muysano para el alumno, ya que estamos convencidosde que solamente ası se adquiere cierta experien-cia y habilidad en la solucion de problemas.
3.1.-) Integrar las siguientes ecuaciones
1. y′′ = 2x2.
2. y′′′ = sen(kx).
3. y′′ = x4.
4. y′′′ = 1x .
5. y(n) = xm.
6. y′′ − a2y = 0.
7. y′′ = bx .
8. y′′ = lnx.
9. y′′′ = cos(kx).
10. y′ = eax cos(kx).
3.2.-) Ecuaciones Reducibles a Ecuacionesde Primer Orden
1. y′′ = x(y′)3.
2. (2y + 3)y′′ − 2(y′)2 = 0.
3. xy′′ + x(y′)2 = y′.
4. yy′′ = (y′)2; y(0) = 1, y′(0) = 2.
5. y′′ + yy′ = 0.
6. 2xy′y′′ = (y′)2 − 1.
7. yy′′ = (y′)2 + yy′.
8. (y′′)2 + y′ = xy′′.
9. yy′′ = (y′)2 + y2 ln y.
10. y′′ = (y′)2+y′
(y+1) .
3.3.-) Ecuaciones Lineales Homogeneas
1. y′′ − y′ − 2y = 0.
2. y′′ − 4y′ + 4y = 0.
3. y′′ − 4y′ = 0.
4. 3y′′ − 2y′ − 8y = 0.
5. yIV + a4y = 0.
6. y′′ + y = 0, y(0) = 1, y′(π/3) = 0.
7. y′′+5y′+6y = 0, y(0) = 1, y′(0) = −6.
8. 4y′′ − 8y′ + 5y = 0.
9. y′′− 4y′ + 3y = 0, y(0) = 6, y′(0) = 10.
10. 4y′′ + 4y′ + y = 0, y(0) = 2, y′(0) = 0.
11. y′′′ − 3y′′ − 2y′ − y = 0.
12. y′′′ − 3y′′ + 3y′ + y = 0, y(0) = 1,y′(0) = 2, y′′(0) = 3.
3.4.-) Ecuaciones Lineales no Homogeneas
1. y′′ + y = 4xex.
2. y′′ − y = 2ex − x2.
3. y′′ − 3y′ + 2y = senx.
4. y′′ + y = 4 senx.
5. y′′ + y′ − 2y = cosx− 3 senx, y(0) = 1,y′(0) = 2.
6. y′′ − 5y′ + 4y = 4x2e2x.
7. y′′ − y′ = cosh 2x, y(0) = y′(0) = 0.
8. y′′ − 4y′ + 3y = e5x, y(0) = 3,y′(0) = 9.
9. y′′ − 2y′ − 3y = e4x.
10. y′′ + y′ − 2y = x2e4x.
11. y′′ + 5y′ + 6y = 5 senx.
12. ay′′′ + y′′ + 9ay′ + 9y = 372 e
−x/a.
13. y′′ − 2y′ + 5y = 1 + ex cos 2x.
14. y′′ + 3y′ − 4y = e−4x + xe−x.
15. y′′ + 2y′ − 3y = x2ex.
16. y′′ − 4y′ + 8y = e2x + sen 2x.

3.15. PROBLEMAS DE REPASO DEL CAPITULO 3: 177
17. y′′ − 9y = e3x cosx.
18. y′′ − 2y′ + y = 6xex.
19. y′′ + y = x senx.
20. y′′ + 4y′ + 4y = xe2x.
21. y′′ − 5y′ = 3x2 + sen 5x.
22. y′′ + y′ + 2y = ex + cos 3x+ x2 + 2.
23. y′′ + 2y′ + y = 8xe−x.
24. y′′ − 4y′ + 5y = e2x(senx+ 2 cosx).
25. y′′ − 5y′ + 6y = (12x− 7)e−x.
26. 3y′′ + 4y′ + 5y = e2x + 1.
27. y′′ + 2y′ + y = e−x + senx.
28. y′′ − 5y′ + 6y = (x2 + 2x+ 1)e−3x.
29. y′′ + 3y′ + 2y = 250.
30. 2y′′ + 3y′ + 8y = x10 + x.
31. y′′ − 4y′ + 5y = e2x senx++ ex(x+ 3).
32. y′′ + 2y′ + y = e−x.
33. y′′ − 4y′ + 10y = 2.
34. y′′ + y = x2 cosx.
35. y′′ − y′ + y = x3.
36. y′′ + 5y′ + 10y = −2e3x.
37. y′′ + 2y′ + 3y = e2x.
38. y′′ − 3y′ + 2y = e3x, y(0) = y′(0) = 0.
39. y′′+4y′+6y = 1+e−x, y(0) = y′(0) = 0.
40. y′′ + 4y = 4x.
3.5.-) Metodo de Variacion de Paramet-ros
1. y′′ + 4y = 1cos 2x .
2. y′′ + 2y′ + 2y = 1ex sen x .
3. y′′ − y′ = ex
ex+1 .
4. y′′ + y = 1√cos 2x
.
5. y′′ − 2y′ + y = ex
x .
6. y′′ − y′ = (ex + 1)−1.
7. y′′ − 2y′ + y = ex
x2+1 .
8. y′′ − y′ = e2x(1− e−2x)1/2.
9. y′′ − y = 2ex
ex−1 .
10. y′′ + 5y′ + 6y = 1e2x+1 .
11. y′′ + 3y′ + 2y = 1ex+1 .
12. y′′ + y = 1sen x .
13. y′′ + 2y′ + y = 3e−x√x+ 1.
3.6.-) Ecuaciones de Cauchy-Euler
1. x2y′′ − xy′ + y = 2x.
2. x2y′′ + xy′ + y = x(6− lnx).
3. x2y′′ + 3xy′ + y = 0.
4. xy′′ + y′ = 0.
5. x2y′′ − xy′ + 3y = 0.
6. x2y′′ − xy′ − 3y = − 16 ln xx .
7. x2y′′′ − 2y′ = 0.
8. x2y′′ − xy′ + y = 4x3.
9. x2y′′ + xy′ + 4y = 10x.
10. x3y′′ − 2xy = 6 lnx.
11. x2y′′ − 3xy′ + 5y = 3x2.
12. x2y′′ − 6y = 5x3 + 8x2.
13. x2y′′ − 2y = sen(lnx).
14. (x− 2)2y′′ − 3(x− 2)y′ + 4y = x.
15. (2x+ 3)3y′′′ + 3(2x+ 3)y′ − 6y = 0.
3.7.-) Resolver las Siguientes EcuacionesDiferenciales
1. y′′ + y′ + y = xex + e−x(2x+ 1).
2. y′′−2y′+2y = ex(x+1)+e−x(5x2−8x+2).
3. 4y′′ + y = −4 cos x2 − 8x sen x
2 .

178 CAPITULO 3. ECUACIONES DIFERENCIALES DE ORDEN SUPERIOR
4. x2y′′ + 7xy′ + 8y = 0.
5. x2y′′ + 3xy′ − 3y = 0.
6. y′′ − 3y′ + 2y = −e2x(4x+ 3)− ex.
7. y′′ + 3y′ + 2y = 7 cosx− senx.
8. y′′ − y′ + y = ex(x+ 2) senx.
9. y′′ + 2y′ + y = 8x2 cosx− 4x senx.
10. y′′ − 3y′ + 2y = 1e−x+1 .
11. y′′ − y = 4e−x
1−e−2x .
12. y′′ − 2y′ + y = 14x3/2ex.
13. y′′ − 6y′ + 5y = e−3x(35− 8x).
14. y′′ − 3y′ + 2y = e3x(x+ 1).
15. y′′ − 4y′ − 5y = −6xe−x.
16. 9x2y′′ + 15xy′ + y = 0.
17. x2y′′ − 3xy′ + 4y = 0.
18. x2y′ + 3xy′ + y = 0.
19. y′′ − y = ex.
20. y′′ − y′ − 2y = 3e−x.
21. x2y′′ − 2xy′ + 2y = x2.
22. y′′ − 4y′ + 4y = x−2e2x.
23. x2y′′ − 3xy′ + 4y = x2 lnx.
24. y′′ − y = 2 lnx.
25. y′′ + y′ − 2y = x2.
26. x2y′′ + xy′ − 2y = xex.
27. y′′′ + 8y = e−x senx.
28. y′′ + 4y′ + 4y = x−2e2x.
29. y′′ + y′ − 2y = 6ex.
30. x2y′′ + xy′ − y = x2.
31. y′′ + y′ − 2y = 4x2.
32. y′′ − 3y′ + 2y = (x+ 1)2.
33. y′′ + 6y′ + 9y = 2 + e3x.
34. y′′′ + 5y′′ + 4y′ = 4x2 + 2x− 1.
35. x2y′′ + xy′ + 4y = 0.
36. x2y′′ − xy′ + y = lnx.
37. 2x2y′′ − 3xy′ − 3y = x2 + 2x+ 1.
38. (x− 1)2y′′ − 2(x− 1)y′ − 4y = 0.
39. x2y′′ + 3xy′ + y = 1x , y(1) = 1,
y′(0) = 0.
40. y′′ − 4y′ + 8y = 61e2x senx, y(0) = 0,y′ = 4.
41. y′′ + 9y = 2 senx sen 2x.
42. y′′ + 2xy
′ + y = 0.
43. y′′′′ − 2y′′′ + y′′ = 0.
44. y′′′′ + 5y′′ + 4y = 0.

Capıtulo 4
TRANSFORMADA DELAPLACE
Hasta el momento hemos aprendido a resolver ecuaciones diferenciales de primer orden y deorden superior, tanto lineales homogeneas como lineales no homogeneas con coeficientes constantes,y un tipo muy especial de ecuaciones con coeficientes variables llamadas ecuaciones de Cauchy-Euler. En todos estos casos suponıamos que la parte derecha (no homogenea) de la ecuacion era unafuncion continua. Sin embargo, en las aplicaciones reales de la ingenierıa la funcion (no homogenea)casi siempre es continua por partes y en ocasiones es un pulso de muy corta duracion, esto traecomplicaciones para los metodos estudiados anteriormente. No obstante, para nuestra tranquilidad,existe un metodo, el cual es aplicable cuando tenemos estos problemas mencionados. Este metodoes conocido como metodo de Laplace, mas comunmente llamado transformada de Laplace .
El metodo de la transformada de Laplace es un metodo operativo que aporta muchas ventajascuando se usa para resolver ecuaciones diferenciales lineales. Mediante el uso de la transformadade Laplace, es posible convertir muchas funciones comunes, tales como las funciones senoidales, lasfunciones senoidales amortiguadas y las funciones exponenciales, en funciones algebraicas de unavariable s que, en general, es compleja. Las operaciones tales como la diferenciacion y la integracionse sustituyen mediante operaciones algebraicas en el plano complejo o real. Si se resuelve la ecuacionalgebraica en s para la variable dependiente, la solucion de la ecuacion diferencial (la transformadainversa de Laplace de la variable dependiente) se encuentra mediante una tabla de transformadasde Laplace, si esto es posible o se aplica la tecnica de expansion en fracciones parciales y luego sehalla la transformada inversa, esta sera la solucion de la ecuacion diferencial.
Sin embargo, la transformada de Laplace es aplicable solo a ecuaciones diferenciales lineales, yaun cuando reemplazan el calculo por el algebra, las operaciones algebraicas pueden resultar muycomplicadas. En las aplicaciones, las funciones discontinuas surgen de manera natural. Por ejemplo,el encendido y apagado de un interruptor son fenomenos discontinuos. Las ecuaciones diferencialesque contienen funciones discontinuas son difıciles de tratar analıticamente usando los metodos antesvistos, pero la transformada de Laplace puede facilitar el tratamiento de esas discontinuidades.
En este capıtulo estudiaremos la transformada de Laplace como una herramienta para resolverecuaciones diferenciales.
A continuacion daremos algunos conceptos basicos de la transformada de Laplace y resolveremosalgunos ejemplos, los cuales, posteriormente, seran de gran utilidad.
179

180 CAPITULO 4. TRANSFORMADA DE LAPLACE
4.1. Conceptos Basicos de la Transformada de Laplace
Sea f(t) una funcion definida para todo t ≥ 0. Entonces, la integral impropia definida como
L[f(t)] =∫∞0e−stf(t)dt ≡ F (s) (4.1)
donde s = σ + jωt, se llama transformada de Laplace de f(t), con la condicion de que la integral(4.1) exista, es decir, que la integral converja.
Una integral impropia sobre un intervalo infinito se define como un lımite de integrales sobreintervalos finitos, es decir ∫ ∞
0
f(t)dt = lımb→∞
∫ b
a
f(t)dt.
Si el lımite existe, decimos que la integral converge, en caso contrario, se dice que la integral divergeo no existe.
La integral (4.1), contiene la variable de integracion t y el parametro s, que en general es complejo,es decir, tiene la forma s = σ+jω, donde a σ se le conoce como frecuencia neper con unidades neper/sy a ω como la frecuencia real medida en radianes sobre segundo rad/s, en este caso, la integral (4.1),se define en un intervalo (−∞,∞). En consecuencia, cuando la integral (4.1) converge, no lo hacesolo en un numero, sino en una funcion F (s). Por consiguiente, la integral impropia (4.1), sueleconvergir para algunos valores de s y divergir para otros. Por lo anterior, es importante indicar eldominio de la transformada de Laplace, el cual tiene la forma <s > σ0, para un cierto numero σ0.En las aplicaciones a la ingenierıa, la variable t representa el dominio del tiempo y s el dominio dela frecuencia.
De manera mas formal y desde un punto de vista estrictamente matematico, decimos que latransformada de Laplace define una operacion que convierte una funcion f(t) a una nueva funciontransformada F (s), y usamos la letra L para representarla. En otras palabras, escribimos F (s) =L[f(t)].
Observe que la transformada de Laplace (4.1) esta definida como una integral sobre el intervalo0 ≤ t < ∞ (y no sobre el eje real entero −∞ < t < ∞). Es necesario usar este intervalo ya que,para <s > 0, e−st → ∞, cuando t → ∞. Si evaluaramos la transformada de Laplace sobre todo eleje real, entonces las restricciones sobre la funcion f(t) serıan mucho mas estrictas. Por oro lado,en la mayorıa de las aplicaciones nos interesa el comportamiento futuro (t ≥ 0), ası que tomamos elintervalo 0 ≤ t <∞.
En la literatura se utiliza una letra minuscula para representar la funcion que se transformay la correspondiente letra mayuscula para representar la funcion transformada. Por ejemplo, latransformada de Laplace de las funciones f(t), g(t) y y(t) se representan como:
L[f(t)] = F (s), L[g(t)] = G(s), L[y(t)] = Y (s). (4.2)
Debido a que, por definicion, la transformada de Laplace es una transformada integral, esta es lineal,es decir, para una suma de funciones αf(t) + βg(t), la transformada de Laplace es∫ ∞
0
e−st[αf(t) + βg(t)]dt = α
∫ ∞
0
e−stf(t)dt+ β
∫ ∞
0
e−stg(t)dt = αF (s) + βG(s) (4.3)
donde α y β son ciertas constantes arbitrarias. La expresion (4.3) la podemos escribir de la siguiente

4.1. CONCEPTOS BASICOS DE LA TRANSFORMADA DE LAPLACE 181
manera
L[αf(t) + βg(t)] = αL[f(t)] + βL[g(t)] = αF (s) + βG(s) (4.4)
Debido a esta propiedad se dice que la transformada de Laplace es una transformada lineal o unoperador lineal que transforma la funcion f(t) en la funcion F (s). A la funcion f(t) se le conocetambien como funcion objeto, y a su correspondiente transformada F (s) como su imagen.
Es obvio que, por definicion de la transformada de Laplace, no para toda funcion existe sucorrespondiente transformada de Laplace. Sin embargo, existe una clase amplia de funciones paralas cuales la transformada de Laplace existe, esto se debe al hecho de que la exponencial e−st enla integral (4.1) actua como funcion de ”amortiguamiento”. A continuacion daremos las condicionesque debe cumplir la funcion f(t) para que exista su transformada de Laplace.
Las condiciones suficientes que garantizan la existencia de la transformada de Laplace son:
que la funcion f(t) sea una funcion continua por partes (seccionalmente continua) en [0,∞),
que la funcion f(t) sea una funcion de orden exponencial para t > t0.
Una funcion f(t) es continua por partes (seccionalmente continua) en [0,∞), si en cualquier intervalo0 < a < t < b existen a lo mas un numero finito de puntos tk en que k = 1, 2..., n y tn−k < tk en loscuales f(t) tiene discontinuidades finitas y es continua en cada intervalo abierto tn−k < t < tk.
Figura 4.1: Funcion continua por partes.
Se dice que una funcion f(t) es de orden exponencial si existen ciertos numeros M > 0 y σ0 ≥ 0tales que se cumpla la relacion
|f(t)| < Meσ0t, para todo t. (4.5)
Al numero σ0 se le llama exponente de crecimiento. Esto quiere decir, que al aumentar t, el crec-imiento del modulo de la funcion f(t) no es superior al de alguna funcion exponencial. La condicion(4.5) garantiza la existencia de la integral (4.1).
Las funciones f1(t) = t, f2(t) = e−t y f3(t) = 4 cos t son todas de orden exponencial, ya quecumplen las relaciones
|t| ≤ et, |e−t| ≤ et, |4 cos t| ≤ 4et. (4.6)

182 CAPITULO 4. TRANSFORMADA DE LAPLACE
La funcion f(t) = et2 no es de orden exponencial, pues esta crece mas rapido que cualquier potencialineal positiva de c para t > c > 0. Las condiciones anteriores se resumen en el siguiente teorema.
Teorema 4.1.1. Si f(t) es una funcion continua por partes para t ≥ 0, y de orden exponencial,entonces la transformada de Laplace L[f(t)] de f(t) existe para <s > σ0.
4 Debido a que f(t) es continua por partes, la expresion e−stf(t) sera integrable sobre cualquierintervalo finito del eje t. En el calculo de integrales impropias existe un teorema, el cual afirmaque la convergencia absoluta implica la convergencia. Entonces, es suficiente probar que la integral∫∞0|e−stf(t)|dt existe para <s > σ0. Para esto, basta a su vez con probar que el valor de la integral∫ b
0|e−stf(t)|dt permanece acotado cuando b→∞. Luego, la desigualdad (4.5) implica que∫ b
0
|e−stf(t)|dt <∫ b
0
|e−stMeσ0t|dt = M
∫ b
0
|e−(s−σ0)t|dt < M
∫ ∞
0
|e−(s−σ0)t|dt =M
|s− σ0|, (4.7)
en donde fue necesaria la condicion <s > σ0 para la existencia de la ultima integral. 4
4.2. Transformada de Laplace de Algunas FuncionesElementales
En esta seccion calcularemos la transformada de Laplace de algunas funciones basicas que nosseran muy utiles en secciones posteriores.
Ejemplo 1:
Sea la funcionf(t) = A, ∀t ≥ 0 (4.8)
donde A es cierta constante arbitraria. Calcular su transformada de Laplace.
Solucion:
Por definicion, la transformada de Laplace se expresa mediante la integral
L[A] =∫ ∞
0
Ae−stdt = A
∫ ∞
0
e−stdt = −Ae−st
s
∣∣∣∞0
=A
se−st
∣∣∣0∞
=A
s−A lım
t→∞
1se−st. (4.9)
El lımite que se toma en el ultimo termino de la expresion (4.9) depende del valor de s. Si <s > 0, elexponente −st tiende a −∞, cuando t→∞, y como consecuencia, e−st → 0. Por lo tanto, el ultimotermino de (4.9) se hace cero. Si <s < 0, entonces el ultimo termino de (4.9) tiende al infinito ycomo consecuencia la integral diverge. Por ultimo, si <s = 0, entonces la integral
∫∞0dt→∞. Como
conclusion, tenemos que la integral (4.9) existe solamente cuando <s > 0, y el resultado es
L[A] =A
s, <s > 0. (4.10)
Ejemplo 2:
Sea la funcionf(t) = t, ∀t > 0. (4.11)
Calcular su transformada de Laplace.
Solucion:

4.2. TRANSFORMADA DE LAPLACE DE ALGUNAS FUNCIONES ELEMENTALES 183
Para f(t) = t, tenemos
L[t] =∫ ∞
0
te−stdt→u = t, du = dt, dv = e−stdt, v = −1
se−st
= − t
se−st
∣∣∣∞0
+1s
∫ ∞
0
e−stdt = −e−st
s2
∣∣∣∞0
=1s2, <s > 0. (4.12)
Ejemplo 3:
Calcular la transformada de Laplace de la funcion
f(t) = t2. (4.13)
Solucion:
Para f(t) = t2, tenemos
L[t2] =∫ ∞
0
t2e−stdt→u = t2, du = 2tdt, dv = e−stdt, v = −1
se−st
(4.14)
= − t2
se−st
∣∣∣∞0
+2s
∫ ∞
0
te−stdt =2s
∫ ∞
0
te−stdt. (4.15)
Usando el resultado anterior∫∞0te−stdt = 1/s2, tenemos
L[t2] =2s3, <s > 0. (4.16)
Ejemplo 4:
Hallar la transformada de Laplace de la funcion
f(t) = t3. (4.17)
Solucion:
Para f(t) = t3, tenemos
L[t3] =∫ ∞
0
t3e−stdt→u = t3, du = 3t2dt, dv = e−stdt, v = −1
se−st
(4.18)
= − t3
se−st
∣∣∣∞0
+3s
∫ ∞
0
t2e−stdt =2 · 3s4
, <s > 0. (4.19)
donde hemos usado el resultado anterior, es decir, la L[t2] = 2/s3.
Ejemplo 5:
Calcular la transformada de Laplace de la funcion
f(t) = tn. (4.20)
Solucion:
Sustituyendo la funcion (4.20), en la definicion (4.1), obtenemos
L[tn] =∫ ∞
0
tne−stdt→u = tn, du = ntn−1dt, dv = e−stdt, v = −1
se−st
= − t
n
se−st
∣∣∣∞0
+n
s
∫ ∞
0
tn−1e−stdt, (4.21)

184 CAPITULO 4. TRANSFORMADA DE LAPLACE
para s > 0 y n > 0 el primer termino de la derecha en (4.21) es igual a cero, y tenemos solamente∫ ∞
0
tne−stdt =n
s
∫ ∞
0
tn−1e−stdt, <s > 0. (4.22)
Podemos observar que el termino de la izquierda de (4.22), es L[tn] y el termino de la derecha esL[tn−1], es decir, la expresion (4.22), es equivalente a
L[tn] =n
sL[tn−1], <s > 0, n > 0. (4.23)
De esta expresion podemos ver que para n > 1, tenemos
L[tn−1] =n− 1s
L[tn−2]. (4.24)
Para n > 2, tenemos
L[tn−2] =n− 2s
L[tn−3], n > 2. (4.25)
Sustituyendo las expresiones (4.25), en (4.24), y a su vez en (4.23), tenemos
L[tn] =n(n− 1)(n− 2)
s3L[tn−3]. (4.26)
Repitiendo este mismo proceso, tendremos
L[tn] =n(n− 1)(n− 2) · · · ·2 · 1
snL[t0] =
n(n− 1)(n− 2) · · · ·2 · 1sn
(1s
)(4.27)
Finalmente, si n ≥ 0, entonces
L[tn] =n!sn+1
, <s > 0. (4.28)
Ejemplo 6:
Calcular la transformada de Laplace de la funcion
f(t) = t1/2. (4.29)
Solucion:
Tenemos
L[t1/2] =∫ ∞
0
t1/2e−stdt→x = st, t =
x
s, dt =
1sdx
=
∫ ∞
0
(xs
)1/2 e−x
sdx =
1s3/2
∫ ∞
0
x1/2e−xdx =1s3/2
Γ(3
2
), (4.30)
donde Γ( 32 ) es la funcion Gamma o funcion de Euler , definida como Γ(p) =
∫∞0xp−1e−xdx, donde p
es un numero cualquiera. Para obtener el valor de p igualamos p−1 = 1/2, de donde p = 3/2. Vamos autilizar la formula Γ( 1
2 ) =√π, despues usando la formula general Γ(m+ 1
2 ) = (2m)!m!22m Γ( 1
2 ) = (2m)!m!22m
√π,
para calcular Γ( 32 ), resulta
Γ(3
2
)= Γ
(1 +
12
)=
2!22
Γ(1
2
)=
12√π. (4.31)
Sustituyendo en (4.30), el resultado obtenido, finalmente tenemos
L[t1/2] =√π
2s3/2, <s > 0. (4.32)

4.2. TRANSFORMADA DE LAPLACE DE ALGUNAS FUNCIONES ELEMENTALES 185
De igual manera se puede hallar la transformada de Laplace de la funcion f(t) = t−1/2, esto se dejaal estudiante como ejercicio.
Ejemplo 7:
Calculemos la transformada de Laplace de la funcion
f(t) = tα, α > −1. (4.33)
Solucion:
Por definicion de la transformada de Laplace, tenemos
L[tα] =∫ ∞
0
tαe−stdt→x = st, t =
x
s, dt =
1sdx,
=
∫ ∞
0
(xs
)α(e−x
s
)dx =
1sα+1
∫ ∞
0
xαe−xdx. (4.34)
Comparando la integral con la definicion de la funcion Gamma, tenemos que p − 1 = α, o bienp = α+ 1, entonces la integral ∫ ∞
0
xαe−xdx = Γ(α+ 1). (4.35)
Sustituyendo la expresion (4.35), en (4.34), tenemos
L[tα] =Γ(α+ 1)sα+1
, α > −1, <s > 0. (4.36)
Ejemplo 8:
Calcular la transformada de Laplace, para la funcion
f(t) = eat, (4.37)
donde a es una constante arbitraria.
Solucion:
Sustituyendo la funcion (4.37), en la definicion (4.1), obtenemos
L[eat] =∫ ∞
0
eate−stdt =∫ ∞
0
e−(s−a)tdt, (4.38)
para s ≤ a el exponente de e en la integral es positivo o igual a cero, y entonces la integral esdivergente. Para s > a, el exponente e de la integral es negativo y la integral es convergente, por lotanto, para s > a la transformada de Laplace existe, y se puede obtener integrando la expresion
L[eat] =∫ ∞
0
e−(s−a)tdt = −e−(s−a)t
s− a
∣∣∣∞0
=1
s− a, <s > a. (4.39)
Ejemplo 9:
Calcular las transformadas de Laplace de las funciones hiperbolicas senh(ωt) y cosh(ωt), dondeω es una constante arbitraria.
Solucion:
Hagamos uso de las formulas
senhx =ex − e−x
2, coshx =
ex + e−x
2. (4.40)

186 CAPITULO 4. TRANSFORMADA DE LAPLACE
Entonces, la transformada de Laplace para la funcion senh(ωt) es
L[senh(ωt)] = L[eωt − e−ωt
2
]=
12
( 1s− ω
− 1s+ ω
)=
12
[ (s+ ω)− (s− ω)(s− ω)(s+ ω)
]=
12
( 2ωs2 − ω2
)=
ω
s2 − ω2. (4.41)
Para la funcion cosh(ωt), tenemos
L[cosh(ωt)] = L[eωt + e−ωt
2
]=
12
( 1s− ω
+1
s+ ω
)=
12
[ (s+ ω) + (s− ω)(s− ω)(s+ ω)
]=
12
( 2ss2 − ω2
)=
s
s2 − ω2, <s > ω. (4.42)
Donde hemos aplicado el resultado obtenido en (4.39).
Ejemplo 10:
Hallar la transformada de Laplace de la funcion
f(t) = cos(ωt). (4.43)
Solucion:
Para f(t) = cos(ωt), tenemos
L[cos(ωt)] =∫ ∞
0
cos(ωt)e−stdt→u = cos(ωt), du = −ω sen(ωt)dt, dv = e−stdt,
v = −e−st
s
= −1
scos(ωt)e−st
∣∣∣∞0− ω
s
∫ ∞
0
sen(ωt)e−stdt =1s− ω
s
∫ ∞
0
sen(ωt)e−stdt
=u = sen(ωt), du = ω cos(ωt)dt, dv = e−stdt, v = −e
−st
s
=
1s− ω
s
[− sen(ωt)
se−st
∣∣∣∞0
+ω
s
∫ ∞
0
cosωte−stdt]
=1s−
− ω2
s2
∫ ∞
0
cos(ωt)e−stdt, (4.44)
donde hemos usado la integracion por partes obteniendo la siguiente expresion∫ ∞
0
cos(ωt)e−stdt+ω2
s2
∫ ∞
0
cos(ωt)e−stdt =1s. (4.45)
Factorizando la integral tenemos(1 +
ω2
s2
) ∫ ∞
0
cos(ωt)e−stdt =1s. (4.46)
de donde ∫ ∞
0
cos(ωt)e−stdt =s2
(s2 + ω2)s=
s
s2 + ω2. (4.47)
Finalmente, tenemos el resultado
L[cos(ωt)] =s
s2 + ω2, <s > 0. (4.48)

4.2. TRANSFORMADA DE LAPLACE DE ALGUNAS FUNCIONES ELEMENTALES 187
Ejemplo 11:
Hallar la transformada de Laplace del producto de funciones
f(t) = eat cos(ωt). (4.49)
Solucion:
Aplicando la definicion de transformada de Laplace, tenemos
L[f(t)] =∫ ∞
0
cos(ωt)e−(s−a)tdt→u = cos(ωt), du = −ω sen(ωt)dt,
dv = e−(s−a)tdt, v = − 1s− a
e−(s−a)t
= −e−(s−a)t
s− acos(ωt)
∣∣∣∞0
− ω
s− a
∫ ∞
0
sen(ωt)e−(s−a)tdt =1
s− a− ω
s− a
∫ ∞
0
sen(ωt)e−(s−a)tdt. (4.50)
Calculemos la integral de la expresion (4.50), por separado∫ ∞
0
sen(ωt)e−(s−a)tdt →u = sen(ωt), du = ω cos(ωt)dt, dv = e−(s−a)tdt,
v = − 1s− a
e−(s−a)t
= −e−(s−a)t
s− asen(ωt)
∣∣∣∞0
(4.51)
+ω
s− a
∫ ∞
0
cos(ωt)e−(s−a)tdt =ω
s− a
∫ ∞
0
cos(ωt)e−(s−a)tdt.
Sustituyendo el resultado de (4.52), en (4.50), tenemos∫ ∞
0
cos(ωt)e−(s−a)tdt =1
s− a− ω
s− a
ω
s− a
∫ ∞
0
cos(ωt)e−(s−a)tdt. (4.52)
Aquı podemos ver que agrupando terminos resulta∫ ∞
0
cos(ωt)e−(s−a)tdt[1 +
ω2
(s− a)2]
=1
s− a. (4.53)
Finalmente, el resultado es
L[eat cos(ωt)] =∫ ∞
0
cos(ωt)e−(s−a)tdt =s− a
(s− a)2 + ω2, <s > a. (4.54)
Ejemplo 12:
Calcular la transformada de Laplace de la funcion exponencial compleja
f(t) = ejωt. (4.55)
Solucion:
Tenemos
L[ejωt] =∫ ∞
0
ejωte−stdt =∫ ∞
0
e−(s−jω)tdt = − 1s− jω
e−(s−jω)t =1
s− jω. (4.56)
Observamos, que el resultado 1s−jω lo podemos escribir como s+jω
(s−jω)(s+jω) = ss2+ω2 + j ω
s2+ω2 . Dedonde podemos identificar que la parte real e imaginaria no son ni mas ni menos que las transfor-madas de las funciones cos(t) y sen(t). Es decir, L[cos(t)] = s
s2+ω2 , obtenido en (4.407), y L[sen(t)] =ω
s2+ω2 . Esto es obvio, ya que la funcion exponencial se puede escribir como: ejωt = cos(t) + j sen(t).

188 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejemplo 13:
Calcular la transformada de Laplace de la funcion
f(t) = cos2(ωt), ω constante. (4.57)
Solucion:
Antes que nada recordemos que cos2(ωt) = 12 + 1
2 cos 2ωt. Luego, aplicando la transformada deLaplace, obtenemos
L[f(t)] = L[12
]+
12L
[cos(2ωt)
]=
12s
+s
2(s2 + 4ω2)=
s2 + 2ω2
s(s2 + 4ω2), <s > 0. (4.58)
De la misma manera se calcula la transformada de Laplace de la funciones f(t) = senωt y f(t) =eat sen(ωt), se deja como ejercicio al alumno. Ahora obtengamos la transformada de Laplace parafunciones continuas por partes haciendo uso de la propiedad de linealidad.
Ejemplo 14:
Sea la funcion continua por partes
f(t) =t para 0 ≤ t < 3,2 para t ≥ 3. (4.59)
Calcular su transformada de Laplace.
Solucion:
Debido a que la funcion esta definida por partes (en dos), la transformada de Laplace se calculaen dos partes, esto es por la propiedad de linealidad de la transformada de Laplace. Tenemos
L[f(t)] =∫ ∞
0
f(t)e−stdt =∫ 3
0
f(t)e−stdt+∫ ∞
3
f(t)e−stdt (4.60)
=∫ 3
0
te−stdt+∫ ∞
3
2e−stdt. (4.61)
Evaluemos cada una de las integrales por separado, tenemos∫ 3
0
te−stdt →u = t, du = dt, dv = e−stdt, v = −1
se−st
= − t
se−st
∣∣∣30
+1s
∫ 3
0
e−stdt = −3se−3s − 1
s2e−st
∣∣∣30
= −3se−3s − 1
s2e−3s +
1s2. (4.62)
Para la segunda integral de (4.61), tenemos
2∫ ∞
3
e−stdt = −2se−st
∣∣∣∞3
=2se−3s. (4.63)
Sumando los resultados y agrupando terminos, finalmente tenemos
L[f(t)] =∫ 3
0
te−stdt+ 2∫ ∞
3
e−stdt = −(1s
+1s2
)e−3s +
1s2, <s > 0. (4.64)

4.2. TRANSFORMADA DE LAPLACE DE ALGUNAS FUNCIONES ELEMENTALES 189
Ejemplo 15:
Hallar la transformada de Laplace de la siguiente funcion
f(t) =
2, 0 < t < π0, π < t < 2πsen t, t > 2π
. (4.65)
Solucion:
De la definicion, tenemos
L[f(t)] =∫ π
0
2e−stdt+∫ 2π
π
0e−stdt+∫ ∞
2π
sen te−stdt =∫ π
0
2e−stdt+∫ ∞
2π
sen te−stdt. (4.66)
Hagamos por separado las integrales
2∫ π
0
e−stdt = −2se−st
∣∣∣π0
= −2se−πs +
2s. (4.67)
y ∫ ∞
2π
sen te−stdt →u = sen t, du = cos tdt, dv = e−stdt, v = −1
se−st
=
= −1s
sen te−st∣∣∣∞2π
+1s
∫ ∞
2π
cos te−stdt =1s
∫ ∞
2π
cos te−stdt (4.68)
→u = cos t, du = − sen tdt, dv = e−stdt, v = −1
se−st
= −1
se−st cos t
∣∣∣∞2π− 1s2
∫ ∞
2π
sen te−stdt =1se−2πs − 1
s2
∫ ∞
2π
sen te−stdt.
Como resultado de la integracion se tiene∫ ∞
2π
sen te−stdt =1se−2πs − 1
s2
∫ ∞
2π
sen te−stdt. (4.69)
Luego, agrupado terminos, obtenemos∫ ∞
2π
sen te−stdt(1 +
1s2
)=
1se−2πs. (4.70)
Entonces ∫ ∞
2π
sen te−stdt =s
s2 + 1e−2πs. (4.71)
Finalmente, poniendo los resultados (4.67) y (4.71), en (4.66), se obtiene la transformada de Laplacede la funcion (4.65). Esta es
L[f(t)] =2s− 2se−πs +
s
s2 + 1e−2πs, <s > 0. (4.72)
Teorema 4.2.1. (primer teorema de desplazamiento) Si
L[f(t)] =∫ ∞
0
f(t)e−stdt ≡ F (s), (4.73)
es la transformada de Laplace de f(t) para <s > σ0, entonces
L[eatf(t)] = F (s− a) (4.74)
es la transformada de Laplace de eatf(t) para <s > σ0 + a.

190 CAPITULO 4. TRANSFORMADA DE LAPLACE
Figura 4.2: Funcion desplazada en el tiempo.
4 De las condiciones del teorema, la transformada de Laplace de la funcion f(t) existe. Obten-gamos la transformada de Laplace del producto eatf(t), es decir
L[eatf(t)] =∫ ∞
0
f(t)eate−stdt =∫ ∞
0
f(t)e−(s−a)tdt =∫ ∞
0
f(t)e−stdt, (4.75)
donde s = s− a. Por definicion, la integral en la expresion (4.75), es F (s), es decir,∫ ∞
0
f(t)e−stdt = F (s) = F (s− a), s > σ0, <s > σ0 + a. 4 (4.76)
Ejemplo 1:
Usar el primer teorema de desplazamiento para calcular la transformada de Laplace de
f(t) = eat cosωt. (4.77)
Solucion:
Primero identificamos la funcion f(t) como f(t) = cosωt. Para esta funcion su transformada deLaplace es (ver ejemplo 11)
L[cosωt] =s
s2 + ω2, <s > ω. (4.78)
Entonces, por el primer teorema de desplazamiento, tenemos
L[eat cosωt] =s− a
(s− ω)2 + ω2, <s > ω. (4.79)
Este resultado ya lo obtuvimos en el ejemplo 11. Entonces, esta clara la ventaja que nos proporcionael conocer y aplicar el primer teorema de desplazamiento.
Ejemplo 2:
Calcular la transformada de Laplace de la funcion
f(t) = eat senωt. (4.80)

4.2. TRANSFORMADA DE LAPLACE DE ALGUNAS FUNCIONES ELEMENTALES 191
Solucion:
Del ejemplo 12, sabemos que la transformada de Laplace de la funcion seno es
L[senωt] =ω
s2 + ω2. (4.81)
Entonces por el primer teorema de desplazamiento, resulta
L[eat senωt] =ω
(s− a)2 + ω2. (4.82)
Ejemplo 3:
Hallar la transformada de Laplace de la funcion
f(t) = eattα. (4.83)
Solucion:
En el ejemplo 7, se demostro que
L[tα] =Γ(α+ 1)sα+1
. (4.84)
Entonces, usando el teorema 4.2.1, obtenemos
L[eattα] =Γ(α+ 1)
(s− a)α+1, <s > a. (4.85)
Ejemplo 4:
Hallar la transformada de Laplace de la funcion
f(t) = 2t3e−12 t. (4.86)
Solucion:
Seag(t) = t3. (4.87)
Entonces su transformada de Laplace, es
G(s) = L[t3] =3!s3+1
=3!s4. (4.88)
Entonces, por el teorema 4.2.1, tenemos
F (s) = L[f(t)] = L[2t3e−
12 t
]=
(2)(3!)(s+ 1
2 )4=
12(s+ 1
2 )4, <s > −1
2. (4.89)
Ejemplo 5:
Calcular la transformada de Laplace de la siguiente funcion
f(t) = e−αt(A cosβt+B senβt). (4.90)
Solucion:

192 CAPITULO 4. TRANSFORMADA DE LAPLACE
Escribamos la expresion (4.90) de la siguiente manera
f(t) = e−αtg(t), (4.91)
dondeg(t) = A cosβt+B senβt. (4.92)
La transformada de Laplace de g(t) es facil de obtener si tomamos en cuenta las formulas
L[cosβt] =s
s2 + β2,
L[senβt] =β
s2 + β2(4.93)
Entonces, la transformada de Laplace de g(t), es
G(s) = L[g(t)] = AL[cosβt] +BL[senβt] =As
s2 + β2+
Bβ
s2 + β2(4.94)
Luego, segun el teorema 4.4.2, tenemos
F (s) = L[f(t)] = L[e−αt(A cosβt+B senβt)
]=A(s+ α) +Bβ
(s+ α)2 + β2. (4.95)
Observacion:
La transformada de Laplace de cualquier funcion f(t) se encuentra si se multiplica f(t) por e−st ydespues se integra el producto de t = 0 a t = ∞. Sin embargo, una vez que conocemos el metodo paraobtener la transformada de Laplace, no es necesario obtener cada vez la transformada de Laplace def(t). Es posible usar las tablas de transformadas de Laplace en forma conveniente para encontrar latransformada de una funcion f(t) determinada.
La tabla (4.2-I) muestra las transformadas de Laplace de las funciones de tiempo que aparecerancon frecuencia en el analisis de ecuaciones diferenciales.

4.3. TRANSFORMADA DE LAPLACE PARA LAS DERIVADAS 193
Tabla (4.2-I), Transformadas de Laplace
funcion Transformadaf(t) = 1 L[1] = 1
s
f(t) = tn L[tn] = n!sn+1
f(t) = eat L[eat] = 1s−a
f(t) = sen(ωt) L[sen(ωt)] = ωs2+ω2
f(t) = cos(ωt) L[cos(ωt)] = ss2+ω2
f(t) = senh(ωt) L[senh(ωt)] = ωs2−ω2
f(t) = cosh(ωt) L[cosh(ωt)] = ss2−ω2
f(t) = t−1/2 L[t−1/2] =√
πs
f(t) = t1/2 L[t1/2] =√
π2s3/2
f(t) = tα L[tα] = Γ(α+1)sα+1 , α > −1
f(t) = sen2(ωt) L[sen2(ωt)] = 2ω2
s(s2+4ω2)
f(t) = teat L[teat] = 1(s−a)2
f(t) = cos2(ωt) L[cos2(ωt)] = s2+2ω2
s(s2+4ω2)
4.3. Transformada de Laplace para las Derivadas
Antes de emplear la transformada de Laplace en la solucion de ecuaciones diferenciales debemossaber cual es la transformada de Laplace correspondiente a las derivadas .
Teorema 4.3.1. Sea f(t) una funcion de orden exponencial, continua por partes para todo t ≥ 0,y diferenciable para todo t > 0 salvo, posiblemente en una sucesion de puntos aislados, entonces, latransformada de Laplace de la derivada de la funcion f ′(t) esta dada por la expresion
L[f ′(t)] = sL[f(t)]− f(0) = sF (s)− f(0) (4.96)
4 Sea la funcion f(t) continua y diferenciable. Esto es, f ′(t) existe. Tomemos la transformadade Laplace de la derivada de la funcion f(t),
L[f ′(t)] =∫ ∞
0
f ′(t)e−stdt. (4.97)
Integrando por partes, seanu = e−st, dv = f ′(t)dt. (4.98)
Entoncesdu = −se−stdt, v = f(t). (4.99)
Tenemos
L[f ′(t)] =∫ ∞
0
f(t)e−stdt = f(t)e−st∣∣∣∞0
+ s
∫ ∞
0
f(t)e−stdt
= sF (s)− f(0). 4 (4.100)
Para definir la transformada de Laplace de la segunda derivada de la funcion f(t), se sigue unprocedimiento similar haciendo uso del resultado obtenido anteriormente. Debido a que
d2f(t)dt2
=d
dt
df(t)dt
. (4.101)

194 CAPITULO 4. TRANSFORMADA DE LAPLACE
Entonces
L[d2f(t)dt2
]= sL
[dfdt
]− df(0)
dt= s[sF (s)− f(0)]− df(0)
dt= s2F (s)− sf(0)− df(0)
dt. (4.102)
La expresion general para la n- esima derivada es
L[f (n)(t)] = snF (s)− s(n−1)f(0)− sn−2f(0)− . . .− sf (n−2)(0)− f (n−1)(0) (4.103)
Hasta el momento sabemos calcular la transformada de Laplace de una funcion y de sus corres-pondientes derivadas. Es facil comprender que si tenemos una ecuacion diferencial y le aplicamos latransformada de Laplace obtendremos una ecuacion algebraica respecto al parametro s. Supongaseque tenemos la ecuacion diferencial no homogenea de primer orden
y′ + 2y = f(t), (4.104)
y queremos aplicar la transformada de Laplace para encontrar una solucion con la condicion inicialy(0) = 2, esto es, en el tiempo t = 0, y = 2. Aplicando la transformada de Laplace, obtenemos
L[y′] + 2L[y] = L[f(t)]. (4.105)
Aplicando los resultados de (4.100), tenemos lo siguiente
sY (s)− 2 + 2Y (s) = F (s), (4.106)
donde hemos usado las letras mayusculas para representar la transformada de Laplace de su co-rrespondiente letra minuscula. Sin complicaciones, la ecuacion (4.106), la podemos reescribir de lasiguiente manera
Y (s) =F (s) + 2s+ 2
. (4.107)
Aun no hemos resuelto el problema, pues hasta el momento no sabemos como regresar a la funciondependiente y(t) que vendrıa siendo la solucion de la ecuacion (4.104). Para esto, debemos definir latransformada inversa de Laplace, de tal manera que podamos calcular la inversa de Y (s) y ası obtenerla solucion y(t) del problema.
4.4. Transformada Inversa de Laplace
Para cumplir con el proposito de este capıtulo, el cual es aplicar la transformada de Laplaceen la busqueda de soluciones de ecuaciones diferenciales con valores iniciales, debemos definir latransformada inversa de Laplace.
Si F (s) es la transformada de Laplace de una funcion f(t), entonces, la transformada inversa deLaplace se define como
f(t) = L−1[F (s)] = 12πj
∫ σ+j∞σ−j∞ F (s)estds (4.108)
La transformada inversa de Laplace nos permite hallar la funcion f(t) si conocemos a la funcionF (s). La transformada inversa de Laplace es tambien una transformada lineal, es decir, cumple lacondicion de linealidad
L−1[αF (s) + βG(s)] = αL−1[F (s)] + βL−1[G(s)], (4.109)

4.4. TRANSFORMADA INVERSA DE LAPLACE 195
donde α y β son constantes arbitrarias.
Ejemplo 1:
Hallar la transformada inversa de Laplace de las funciones
a) F (s) =A
s, b) F (s) =
s
s2 − 4, c) F (s) =
1s2 + 16
, d) F (s) =4s4,
e) F (s) =[ 1s2 − 1
− 4s4
](4.110)
donde A es una constante arbitraria.
Solucion:
Segun la definicion de la transformada inversa de Laplace, debemos encontrar las funciones f(t)tales que sus transformadas de Laplace sean las dadas en la expresion (4.110). Tenemos
a).
f(t) = L−1[F (s)] = L−1[As
]. (4.111)
Si recordamos el resultado obtenido en (4.10), es facil ver que la transformada inversa de (4.111), es
f(t) = L−1[As
]= A. (4.112)
Concluimos, que la transformada inversa de Laplace de la funcion a) en (4.110), es f(t) = A.
b).f(t) = L−1[F (s)] = L−1
[ s
s2 − 4
]= L−1
[ s
s2 − (2)2]
= cosh(2t), (4.113)
donde hemos usado el resultado obtenido en (4.42), con ω = 2.
c).
f(t) = L−1[ 1s2 + 16
]=
14L−1
[ 4s2 + (4)2
]=
14
sen(4t). (4.114)
Aquı, hemos multiplicado por 4 y dividido entre 4, para poder usar la formula L[sen(ωt)] = ωs2+ω2 ,
con ω = 4.
d).
f(t) = L−1[ 4s4
]= L−1
[ 4s3+1
]= L−1
[ 4 · 3!3!s3+1
]=
46L−1
[ 3!s3+1
]=
23t3. (4.115)
e).
f(t) = L−1[ 1s2 − 1
− 4s4
]= L−1
[ 1s2 − 1
]− L−1
[ 4s4
]= senh(t)− 2
3t3. (4.116)
Esto es debido a la propiedad de linealidad.
En la tabla (4.4-I) se muestran las transformadas inversas de algunas funciones importantes quenos seran de gran utilidad.

196 CAPITULO 4. TRANSFORMADA DE LAPLACE
Tabla (4.4-I), Transformadas Inversas
L−1[F (s)] f(t)L−1[ 1s ] f(t) = 1L−1[ n!
sn+1 ] f(t) = tn
L−1[ 1s−a ] f(t) = eat
L−1[ ωs2+ω2 ] f(t) = senωt
L−1[ ss2+ω2 ] f(t) = cosωt
L−1[ ωs2−ω2 ] f(t) = senhωt
L−1[ ss2−ω2 ] f(t) = coshωt
L−1[ 2ωs(s2+ω2)2 ] f(t) = t senωt
L−1[ s2−ω2
(s2+ω2)2 ] f(t) = t cosωt
L−1[ 2ωs2
(s2+ω2)2 ] f(t) = senωt+ ωt cosωt
L−1[ 2ω3
(s2+ω2)2 ] f(t) = senωt− ωt cosωt
L−1[ 1(s−a)(s−b) ] f(t) = eat−ebt
a−b
Ejemplo 2:
Calcular la transformada inversa de Laplace de la funcion
F (s) =2s+ 4s2 + 3
. (4.117)
Solucion:
A esta expresion la podemos representar como
2s+ 4s2 + 3
=2s
s2 + (√
3)2+
4s2 + (
√3)2
. (4.118)
Usando la tabla de las transformadas inversas y aplicando la propiedad de linealidad, obtenemos
f(t) = L−1[2s+ 4s2 + 3
]= 2L−1
[ s
s2 + (√
3)2
]+
4√3L−1
[ √3
s2 + (√
3)2
]=
= 2 cos(√
3t) +4√3
sen(√
3t). (4.119)
4.5. Funciones Racionales
Es muy comun que al resolver ecuaciones diferenciales mediante la transformada de Laplace seanecesario encontrar la transformada inversa de una funcion racional
F (s) = P (s)Q(s) (4.120)
donde P (s) y Q(s) son polinomios sin factores comunes. Para encontrar L−1[F (s)] debemos hallar,primero, el desarrollo en fracciones parciales de F (s), despues obtener las transformadas inversascorrespondientes a los terminos individuales en el desarrollo (usando la tabla de las transformadasde Laplace), y por ultimo, usamos la propiedad de linealidad de la transformada inversa para hallarla funcion f(t).

4.5. FUNCIONES RACIONALES 197
Teorema 4.5.1. Supongamos que tenemos la relacion
F (s) = P (s)Q(s) = P (s)
(s−s1)(s−s2)...(s−sn) (4.121)
donde s1, s2, . . . , sn son distintos y P (s) es un polinomio de grado menor que n. Entonces, F (s) sepuede desarrollar en fracciones parciales
F (s) = P (s)Q(s) = A1
s−s1+ A2
s−s2+ .....+ An
s−sn(4.122)
donde cualquiera de los coeficientes A1, A2, ..., An se pueden evaluar multiplicando por el denomi-nador de dicho coeficiente e igualando a s al valor de la raız del denominador. En otras palabras,para hallar el coeficiente Aj (j = 1, 2, , , , n), tenemos
Aj =[(s− sj)
P (s)Q(s)
]s=sj
(4.123)
Para el caso general, de raıces repetidas r- veces, sea
P (s)Q(s)
=R(s)
(s− sj)r=
Aj1
s− sj+
Aj2
(s− sj)2+ . . .+
Ajn
(s− sj)n+ . . .+
Ajr
(s− sj)r, (4.124)
en donde n es cualquier termino del desarrollo en fracciones parciales y R(s) se define como
R(s) = P (s)Q(s) (s− sj)r (4.125)
Multiplicando la ecuacion (4.124), por (s− sj)r, se obtiene
R(s) = Aj1(s− sj)r−1 +Aj2(s− sj)r−2 + . . .+Ajr. (4.126)
De acuerdo con esta expresion podemos visualizar el metodo que usaremos para evaluar cada co-eficiente. Si hacemos s = sj, desaparecen todos los terminos de la ecuacion (4.126), excepto Ajr,que sı podemos evaluar. A continuacion se deriva la ecuacion una vez respecto a s. El termino Ajr
desaparecera, pero permanecera el termino Aj,r−1 sin que multiplique una funcion de s. Una vez masse puede evaluar Aj,r−1 haciendo s = sj. Para hallar el termino general Ajr se deriva la ecuacion(4.126), (r − n) veces y se hace s = sj, en este caso
Ajn =1
(r − n)!dr−nR(s)dsr−n
∣∣∣s=sj
, (4.127)
o lo que es lo mismo
Ajn = 1(r−n)!
dr−n
dsr−n
[P (s)Q(s) (s− sj)r
]s=sj
(4.128)

198 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejemplo 1:
Descomponer en fracciones parciales la expresion
F (s) =s2 + 4s− 1
(s− 1)(s− 2)(s+ 3). (4.129)
Solucion:
Esta expresion la podemos escribir como
s2 + 4s− 1(s− 1)(s− 2)(s+ 3)
=A
s− 1+
B
s− 2+
C
s+ 3. (4.130)
Para encontrar las constantes hacemos uso del teorema anterior. Esto es, para encontrar A, tenemos
A =s2 + 4s− 1
(s− 2)(s+ 3)
∣∣∣s=1
=1 + 4− 1
(1− 2)(1 + 3)= −1. (4.131)
Calculemos los coeficientes B y C, de la misma manera, esto es
B =s2 + 4s− 1
(s− 1)(s+ 3)
∣∣∣s=2
=4 + 8− 1
(2− 1)(2 + 3)=
115. (4.132)
y
C =s2 + 4s− 1
(s− 1)(s− 2)
∣∣∣s=−3
=9− 12− 1
(−3− 1)(−3− 2)= −1
5. (4.133)
Sustituyendo en (4.130), tenemos el siguiente desarrollo
s2 + 4s− 1(s− 1)(s− 2)(s+ 3)
= − 1s− 1
+11
5(s− 2)− 1
5(s+ 3). (4.134)
Este metodo es conocido como metodo de Heaviside.
Ahora, si queremos encontrar la funcion f(t), es suficiente aplicar la transformada inversa deLaplace. Esto es
f(t) = L−1[F (s)] = −L−1[ 1s− 1
]+
115L−1
[ 1s− 2
]− 1
5L−1
[ 1s+ 3
], (4.135)
y hacer uso de la tabla 4.4-I. El resultado es
f(t) = −et +115e2t − 1
5e−3t. (4.136)
Ejemplo 2:
Hallar la funcion f(t), correspondiente a la transformada de Laplace
F (s) =s+ 1
s3 + s2 − 6s. (4.137)
Solucion:
El denominador lo podemos escribir de la siguiente manera s3+s2−6s = s(s−2)(s+3), entonces
F (s) =s+ 1
s3 + s2 − 6s=A
s+
B
s− 2+
C
s+ 3. (4.138)

4.6. SOLUCION DE ECUACIONES DIFERENCIALES: METODO DE LAPLACE 199
Luego
A =s+ 1
(s− 2)(s+ 3)
∣∣∣s=0
=1
(−2)(3)= −1
6. (4.139)
Los coeficientes B y C los calculamos de la misma manera, esto es
B =s+ 1s(s+ 3)
∣∣∣s=2
=3
(2)(5)=
310. (4.140)
y
C =s+ 1s(s− 2)
∣∣∣s=−3
= − 2(−3)(−3− 2)
=−215. (4.141)
Sustituyendo en la expresion (4.138), obtenemos
F (s) = − 16s
+3
10(s− 2)− 2
15(s+ 3). (4.142)
Aplicando la transformada inversa de Laplace, resulta
f(t) = L−1[F (s)] = −16L−1
[1s
]+
310L−1
[ 1(s− 2)
]− 2
15L−1
[ 1(s+ 3)
]. (4.143)
Haciendo uso de la tabla 4.4-I, tenemos la funcion f(t),
f(t) = −16
+310e2t − 2
15e−3t. (4.144)
Ahora estamos listos para resolver ecuaciones diferenciales con ayuda de la transformada de Laplace.
4.6. Solucion de Ecuaciones Diferenciales: Metodo de Laplace
En esta seccion vamos aplicar el metodo de Laplace para resolver algunas ecuaciones diferenciales.
Ejemplo 1:
Usando la transformada de Laplace resolver la siguiente ecuacion diferencial
y′′ + 3y′ + 2y = 0, y(0) = a, y′(0) = b. (4.145)
Solucion:
Aplicamos la transformada de Laplace
L[y′′] + 3L[y′] + 2L[y] = 0, y(0) = a, y′(0) = b. (4.146)
Usando las formulas de la transformada de Laplace para las derivadas (4.100), y (4.102), obtenemos[s2Y (s)− sy(0)− y′(0)
]+ 3
[sY (s)− y(0)
]+ 2Y (s) = 0, (4.147)
donde L[y(t)] = Y (s), L[y′] = sY (s) − y(0) y L[y′′] = s2Y (s) − sy(0) − y′(0). Sustituyendo lascondiciones iniciales, resulta
s2Y (s)− as− b+ 3sY (s)− 3a+ 2Y (s) = 0. (4.148)
Factorizando [s2 + 3s+ 2
]Y (s) = as+ b+ 3a. (4.149)

200 CAPITULO 4. TRANSFORMADA DE LAPLACE
Despejando, obtenemos
Y (s) =as+ b+ 3as2 + 3s+ 2
=as+ b+ 3a
(s+ 1)(s+ 2)=
A
s+ 1+
B
s+ 2. (4.150)
Por el metodo de Heaviside obtenemos las constantes A y B
A =as+ b+ 3a
s+ 2
∣∣∣s=−1
=−a+ b+ 3a−1 + 2
= 2a+ b. (4.151)
y
B =as+ b+ 3a
s+ 1
∣∣∣s=−2
=−2a+ b+ 3a
(−1)= −(a+ b). (4.152)
Sustituyendo en (4.150), se tiene
Y (s) =2a+ b
s+ 1− a+ b
s+ 2. (4.153)
Luego, calculamos la transformada inversa de Laplace, esto es
y(t) = L−1[Y (s)] = (2a+ b)L−1[ 1s+ 1
]− (a+ b)L−1
[ 1s+ 2
]= (2a+ b)e−t − (a+ b)e−2t, ∀t ≥ 0.
(4.154)Entonces, la solucion del problema de valor inicial (4.145), tiene la forma
y(t) = (2a+ b)e−t − (a+ b)e−2t, ∀t ≥ 0. (4.155)
Ejemplo 2:
Usando la transformada de Laplace, resolver el problema de Cauchy
y′′ + 2y′ + 5y = 3, y(0) = 0, y′(0) = 0. (4.156)
Solucion:
Aplicamos la transformada de Laplace
L[y′′] + 2L[y′] + 5L[y] = 3, y(0) = 0, y′(0) = 0. (4.157)
Usando las formulas de la transformada de Laplace para las derivadas (4.100), y (4.102), obtenemos
s2Y (s) + 2sY (s) + 5Y (s) =3s. (4.158)
Despejando a Y (s), resulta
Y (s) =3
s(s2 + 2s+ 5)=
35
1s− 3
5s+ 2
s2 + 2s+ 5=
35
1s− 3
102
(s+ 1)2 + 22− 3
5s+ 1
(s+ 1)2 + 22. (4.159)
Luego, calculamos la transformada inversa de Laplace
y(t) = L−1[Y (s)] =35L−1
[1s
]− 3
10L−1
[ 2(s+ 1)2 + 22
]− 3
5L−1
[ s+ 1(s+ 1)2 + 22
]. (4.160)
Haciendo uso de la tabla 4.4-I, tenemos el siguiente resultado
y(t) =35− 3
10e−t sen 2t− 3
5e−t cos 2t, ∀t ≥ 0. (4.161)

4.6. SOLUCION DE ECUACIONES DIFERENCIALES: METODO DE LAPLACE 201
Ejemplo 3:
Resolver la siguiente ecuacion diferencial usando la transformada de Laplace
y′′ − 6y′ + 5y = 3e2t, y(0) = 2, y′(0) = 3. (4.162)
Solucion:
Aplicando la transformada de Laplace, tenemos
L[y′′]− 6L[y′] + 5L[y] = 3L[e2t]. (4.163)
Obtenemoss2Y (s)− 2s− 3− 6sY (s) + 12 + 5Y (s) =
3s− 2
. (4.164)
Acomodando terminosY (s)
[s2 − 6s+ 5
]=
3s− 2
+ 2s− 9. (4.165)
Despejamos a Y (s) y obtenemos
Y (s) =3
(s− 2)(s− 1)(s− 5)+
2s(s− 1)(s− 5)
− 9(s− 1)(s− 5)
. (4.166)
Ahora calculemos la inversa de Laplace para obtener y(t),
y(t) = L−1[Y (s)] = 3L−1[ 1(s− 2)(s− 1)(s− 5)
]+ 2L−1
[ s
(s− 1)(s− 5)
]−
− 9L−1[ 1(s− 1)(s− 5)
]. (4.167)
Antes que nada, debemos desarrollar en fracciones parciales el primer termino de la expresion (4.167),
1(s− 2)(s− 1)(s− 5)
=A
s− 2+
B
s− 1+
C
s− 5. (4.168)
TenemosA =
1(s− 1)(s− 5)
∣∣∣s→2
=1
(1)(−3)= −1
3. (4.169)
B =1
(s− 2)(s− 5)
∣∣∣s→1
=1
(−1)(−)=
14. (4.170)
C =1
(s− 2)(s− 1)
∣∣∣s→5
=1
(3)(4)=
112. (4.171)
Sustituyendo en (4.168)
1(s− 2)(s− 1)(s− 5)
= − 13(s− 2)
+1
4(s− 1)+
112(s− 5)
. (4.172)
Calculemos la transformada inversa de esta expresion usando la propiedad de linealidad, esto es
L−1[ 1(s− 2)(s− 1)(s− 5)
]= −L−1
[ 13(s− 2)
]+ L−1
[ 14(s− 1)
]+ (4.173)
+ L−1[ 112(s− 5)
]= −1
3e2t +
14et +
112e5t.

202 CAPITULO 4. TRANSFORMADA DE LAPLACE
De esta manera hemos obtenido la transformada inversa de Laplace para el primer termino de laecuacion (4.167), es
3L−1[ 1(s− 2)(s− 1)(s− 5)
]= −e2t +
34et +
14e5t. (4.174)
Para calcular los dos ultimos terminos de la ecuacion (4.167), hagamos uso de las formulas
L−1[ s
(s− a)(s− b)
]=aeat − bebt
a− b, L−1
[ 1(s− a)(s− b)
]=eat − ebt
a− b. (4.175)
Donde, a = 1 y b = 5, tenemos
L−1[ s
(s− 1)(s− 5)
]=
et − 5e5t
1− 5= −e
t − 5e5t
4= −1
4et +
54e5t,
L−1[ 1(s− 1)(s− 5)
]= −e
t − e5t
4= −1
4et +
14e5t. (4.176)
Tomando en cuenta las expresiones obtenidas, y haciendo algunos arreglos algebraicos no complica-dos, tenemos que la solucion final de la ecuacion diferencial (4.162), es
y(t) =52et +
12e5t − e2t. (4.177)
Ejemplo 4:
Usando la transformada de Laplace resolver el problema de valor inicial
y′′ + α2y = A sen(ωt), y(0) = 1, y′(0) = 0, (4.178)
donde α, ω y A son ciertas constantes dadas.
Solucion:
Aplicando la transformada de Laplace
L[y′′] + α2[y] = AL[sen(ωt)], (4.179)
resulta la ecuacion algabraica
s2Y (s)− s+ α2Y (s) =Aω
s2 + ω2. (4.180)
Despejando la funcion transformada Y (s), tenemos
Y (s) =s
s2 + α2+
Aω
(s2 + α2)(s2 + ω2). (4.181)
Para obtener la solucion y(t) necesitamos calcular la transformada inversa de Laplace de la expre-sion (4.181). La forma de la transformada inversa dependera de si α y ω son iguales o diferentes.Supongamos primero que son diferentes, es decir α 6= ω. Desarrollemos en fracciones parciales elsegundo termino de (4.181), para esto supongamos que s2 = x, tenemos
1(s2 + α2)(s2 + ω2)
=1
(x+ α2)(x+ ω2)=
B
x+ α2+
C
x+ ω2. (4.182)
Usamos el metodo de Heaviside para calcular las constantes B y C, esto es
B =1
x+ ω2
∣∣∣x=−α2
=1
−α2 + ω2, C =
1x+ α2
∣∣∣x=−ω2
=1
−ω2 + α2. (4.183)

4.6. SOLUCION DE ECUACIONES DIFERENCIALES: METODO DE LAPLACE 203
Sustituyendo estos resultados en (4.182), tenemos
1(s2 + α2)(s2 + ω2)
=1
(x+ α2)(x+ ω2)=
1(−α2 + ω2)(x+ α2)
+1
(−ω2 + α2)(x+ ω2). (4.184)
Ahora, recordemos que x = s2, sustituyendo en la expresion (4.184) y acomodando terminos, final-mente resulta
1(s2 + α2)(s2 + ω2)
=Aω
α2 − ω2
( 1s2 + ω2
− 1s2 + α2
). (4.185)
Entonces, la expresion (4.181), tiene la forma
Y (s) =s
s2 + α2+
A
α(α2 − ω2)
( αω
s2 + ω2− ωα
s2 + α2
), (4.186)
donde hemos multiplicado y dividido por α. Ahora sı, estamos listos para usar las tablas de latransformada inversa de Laplace. El resultado es
y(t) = cos(αt) +A
α(α2 − ω2)[α sen(ωt)− ω sen(αt)], ω 6= α. (4.187)
Para el caso en que α = ω, tenemos de la expresion (4.181)
Y (s) =s
s2 + α2+
Aα
(s2 + α2)2. (4.188)
De la tabla de las transformadas inversas tenemos la formula
L−1[ 2ω3
(s2 + ω2)2]
= sen(ωt)− ωt cos(ωt)
Haciendo uso de esta formula, tenemos que
L−1[ 1(s2 + α2)2
]=
12α3
L−1[ 2α3
(s2 + α2)2]
=1
2α3
[sen(αt)− αt cos(αt)
]. (4.189)
Entonces, de la expresion (4.188), tenemos
y(t) = L−1[Y (s)] = L−1[ s
s2 + α2
]+AαL−1
[ 1(s2 + α2)2
]= cos(αt) +
A
2α2
[sen(αt)− αt cos(αt)
], α = ω. (4.190)
Ejemplo 5:
Usar la trasformada de Laplace para resolver la ecuacion diferencial de cuarto orden con lascondiciones dadas
yIV − y = 1, y(0) = 1, y′(0) = 1, y′′(0) = 2, y′′′(0) = −1. (4.191)
Aplicando la transformada de Laplace a la ecuacion, tenemos la ecuacion
s4Y (s)− s3y(0)− s2y′(0)− sy′′(0)− y′′′(0)− Y (s) =1s. (4.192)
Considerando las condiciones iniciales
(s4 − 1)Y (s)− s3 − s2 − 2s+ 1 =1s. (4.193)

204 CAPITULO 4. TRANSFORMADA DE LAPLACE
Despejando
Y (s) =s4 + s3 + 2s2 − s+ 1
s(s4 − 1). (4.194)
El denominador lo escribimos como s(s4 − 1) = s(s2 − 1)(s2 + 1) = s(s − 1)(s + 1)(s − i)(s + i).Desarrollando en fracciones parciales
s4 + s3 + 2s2 − s+ 1s(s− 1)(s+ 1)(s− i)(s+ i)
=A
s+
B
s− 1+
C
s+ 1+
D
s− i+
E
s+ i. (4.195)
Para hallar los valores de las constantes usamos el metodo de Heaviside, tenemos
A =s4 + s3 + 2s2 − s+ 1
(s− 1)(s+ 1)(s− i)(s+ i)
∣∣∣s=0
=1
(−1)(1)(−i)(i)= −1,
B =s4 + s3 + 2s2 − s+ 1s(s+ 1)(s− i)(s+ i)
∣∣∣s=1
=1 + 1 + 2− 1 + 12(1− i)(1 + i)
= 1, (4.196)
C =s4 + s3 + 2s2 − s+ 1s(s− 1)(s− i)(s+ i)
∣∣∣s=−1
=1− 1 + 2 + 1 + 1
(−1)(−2)(−1− i)(−1 + i)= 1,
D =s4 + s3 + 2s2 − s+ 1s(s− 1)(s+ 1)(s+ i)
∣∣∣s=i
=1− i− 2− i+ 1i(i− 1)(i+ 1)
= − i2,
E =s4 + s3 + 2s2 − s+ 1s(s− 1)(s+ 1)(s− i)
∣∣∣s=−i
=1 + i− 2 + i+ 1
(−i)(−i− 1)(−1 + i)(−i− i)=i
2.
Sustituyendo en (4.195), obtenemos
Y (s) = −1s
+1
s− 1+
1s+ 1
− i
2(s− i)+
i
2(s+ i). (4.197)
Aplicando la transformada inversa
y(t) = L−1[Y (s)] = −L−1[1s
]+L−1
[ 1s− 1
]+L−1
[ 1s+ 1
]− i
2L−1
[ 1s− i
]+i
2L−1
[ 1s+ i
], (4.198)
se obtiene el resultado final
y(t) = −1 + et + e−t − i
2eit +
i
2e−it = −1 + et + e−t + sen t. (4.199)
Hemos utilizado la formula, sen t = eit−e−it
2i .
Ejemplo 6:
Usando la transformada de Laplace, resolver el problema de valor inicial
y′′ + 4y = 3 cos t, y(0) = y′(0) = 0. (4.200)
Solucion:
Calculamos la transformada en ambos lados de la ecuacion, esto es
L[y′′] + 4L[y] = 3L[cos t]. (4.201)
Luego
s2Y (s)− sy(0)− y′(0) + 4Y (s) =3s
s2 + 1. (4.202)

4.7. TRANSFORMADA DE LAPLACE PARA FUNCIONES DISCONTINUAS 205
Al sustituir las condiciones iniciales y despejando la funcion Y (s), obtenemos
Y (s) =3s
(s2 + 4)(s2 + 1). (4.203)
Luego, tomando la inversa, resulta
y(t) = L−1[Y (s)] = L[ 3s(s2 + 4)(s2 + 1)
]. (4.204)
Desarrollemos en fracciones parciales la funcion
1(s2 + 4)(s2 + 1)
. (4.205)
Para esto, hagamos x = s2, entonces
1(x+ 4)(x+ 1)
=A
x+ 4+
B
x+ 1. (4.206)
De donde obtenemos los valores A = − 13 y B = 1
3 , entonces
1(s2 + 4)(s2 + 1)
= − 13(s2 + 4)
+1
3(s2 + 1). (4.207)
Sustituyendo en la expresion (4.204), obtenemos
y(t) = L−1[ −ss2 + 4
]+ L−1
[ s
s2 + 1
]. (4.208)
Usando la tabla de transformada inversa, obtenemos el resultado final
y(t) = − cos 2t+ cos t. (4.209)
Es claro, que las ecuaciones diferenciales que hemos resuelto, las pudimos haber realizado por elmetodo de coeficientes indeterminados, antes visto. Sin embargo, el metodo de Laplace, incluyeautomaticamente las condiciones iniciales, es por eso que en las soluciones no aparecen constantesde integracion.
4.7. Transformada de Laplace para Funciones Discontinuas
En esta seccion presentaremos la transformada de Laplace de algunas funciones discontinuas queson muy importantes en la ingenierıa, al igual que algunos teoremas acerca de la transformada deLaplace, utiles para resolver ecuaciones diferenciales con fuentes discontinuas.
La funcion escalon unitario fue introducida por Heaviside. Esta funcion se representa mediantela expresion
u(t) =
0 para t < 01 para t ≥ 0 (4.210)
Como podemos ver, esta funcion cambia bruscamente desde cero hasta el valor unitario para eltiempo t = 0. En ingenierıa esta notacion es conveniente para representar el cierre de un interruptor

206 CAPITULO 4. TRANSFORMADA DE LAPLACE
Figura 4.3: Funcion escalon.
para t = 0. Por ejemplo, si se conecta una baterıa de voltaje V0 a una red en el tiempo t = 0, elvoltaje impulsor se puede representar como V0u(t), sin necesidad de mencionar la presencia de uninterruptor. Para el caso en que V0 = 1 el producto V0u(t) = u(t), y su transformada de Laplace es
L[u(t)] =∫ ∞
0
u(t)e−stdt =∫ ∞
0
e−stdt = −e−st
s
∣∣∣∞0
=1s, <s > 0. (4.211)
Para el caso en que V0 6= 0, sea un voltaje independiente del tiempo, tenemos
L[V0u(t)] = V0
∫ ∞
0
e−stdt = −V0e−st
s
∣∣∣∞0
=V0
s, <s > 0. (4.212)
La expresion (4.210), se puede generalizar. Para esto hagamos un desplazamiento temporal τ unidades,(t− τ), entonces, tenemos la siguiente relacion
u(t− τ) =
0 para t < τ1 para t ≥ τ
(4.213)
para una funcion escalon que cambia bruscamente en el tiempo t = τ .
Figura 4.4: Funcion escalon desplazada.
En general, la funcion escalon tiene un valor unitario cuando la cantidad (t − τ), (que es elargumento de la funcion u), es positiva y tiene un valor cero cuando (t − τ), es negativa. Estadefinicion se aplica para cualquier forma de variable; por lo tanto, la funcion u(t + τ), es la quecambia desde cero hasta el valor unitario para t = −τ . Del mismo modo, la funcion u(τ − t), esla que cambia desde la unidad hasta el valor cero (para tiempo creciente), para el instante en quet = τ .

4.7. TRANSFORMADA DE LAPLACE PARA FUNCIONES DISCONTINUAS 207
La transformada de Laplace de u(t− τ), se calcula a partir de la definicion (4.1), esto es
L[u(t− τ)] =∫ ∞
τ
e−stdt = −e−st
s
∣∣∣∞τ
=e−τs
s, <s > 0. (4.214)
Este resultado se compone del producto de dos factores; el factor 1s , correspondiente a la transformada
de la funcion escalon unitario, iniciada en el tiempo t = 0, y el termino e−τs, es una funcion queinfluye en la transformada de una funcion escalon que no principia en t = 0, sino en t = τ .
Lo anterior se puede generalizar a cualquier funcion del tiempo f(t), que demore su iniciacionpara otro tiempo t = τ . Una funcion trasladada en el tiempo se representa de la siguiente manera
f(t− τ)u(t− τ). (4.215)
Para hallar la transformada de Laplace de esta funcion trasladada, usamos la definicion (4.1), in-troduciendo en ella una nueva variable temporal t′, podemos escribir la transformada de Laplace,como
L[f(t′)] =∫ ∞
0
f(t′)e−st′dt′ = F (s). (4.216)
Si elegimos la variable t′ como t′ = t− τ , obtenemos que la expresion (4.216), se convierte en
L[f(t′)] =∫ ∞
τ
f(t− τ)e−(t−τ)sdt =∫ ∞
τ
f(t− τ)e−st(eτs)dt. (4.217)
El factor eτs, se puede sacar de la integral y el lımite inferior de la integral se puede cambiar a cerosi f(t− τ), se multiplica por u(t− τ), ası
L[f(t)] = eτs
∫ ∞
0
f(t− τ)u(t− τ)e−stdt. (4.218)
Esta expresion integral se reconoce como la transformada de la funcion f(t− τ)u(t− τ), tenemos
L[f(t− τ)u(t− τ)] = e−τsL[f(t)] = e−τsF (s). (4.219)
Para el caso inverso tendremos
L−1[e−τsF (s)] = f(t− τ)u(t− τ). (4.220)
Estas ecuaciones indican que la transformada de cualquier funcion trasladada, para principiar en eltiempo t = τ , es e−τs veces la transformada de la funcion cuando principia en t = 0. Este resultadoes importante y lo formularemos como teorema:
Teorema 4.7.1. (segundo teorema de desplazamiento) Suponga que τ ≥ 0, y L[f(t)], existe paratodo s > s0. Entonces, L[u(t− τ)f(t− τ)], existe para <s > σ0, y
L[u(t− τ)f(t− τ)] = e−τsF (s) (4.221)
Para el caso inverso, tenemos
L−1[e−τsF (s)] = f(t− τ)u(t− τ) (4.222)

208 CAPITULO 4. TRANSFORMADA DE LAPLACE
Este teorema establece que multiplicar una transformada de Laplace por el exponencial e−sτ
corresponde a desplazar el argumento de la transformada inversa en τ unidades.
Ejemplo 1:
Calcular la transformada inversa de Laplace de la funcion
Y (s) =(5s− 1s2
)+ e−3s
(6s
+7s2
)+
3e−6s
s3. (4.223)
Solucion:
Para resolver este problema hagamos uso de la propiedad de linealidad de la transformada y delsegundo teorema de desplazamiento. Definamos
Y1(s) =(5s− 1s2
), Y2(s) =
(6s
+7s2
), Y3(s) =
3s3. (4.224)
La transformada inversa de estas expresiones es facil de calcular usando las formulas de la tabla4.4-1. Tenemos como resultado
y1(t) = L−1[Y1(s)] = 5− t, y2(t) = L−1[Y2(s)] = 6 + 7t, y3(t) = L−1[Y3(s)] =32t2. (4.225)
Luegoy(t) = L−1[Y1(s)] + L−1[e−3sY2(s)] + L−1[e−6sY3(s)]. (4.226)
Del segundo teorema de desplazamiento tenemos para el segundo y tercer termino de (4.226),
L−1[e−3sY2(s)] = u(t− 3)[6 + 7(t− 3)], L−1[e−6sY3(s)] =32u(t− 6)[(t− 6)2] (4.227)
Sustituyendo estos resultados en (4.226), finalmente, tenemos la solucion
y(t) = (5− t)u(t) + u(t− 3)[7t− 15] +32u(t− 6)[(t− 6)2]. (4.228)
Veamos otra de las utilidades de la funcion escalon. Supongamos que tenemos una funcion continuapor partes definida en el intervalo [0,∞),
f(t) =f0(t) para 0 ≤ t < t1,f1(t) para t ≥ t1.
(4.229)
Se supone que f0(t) y f1(t) ∈ [0,∞). El uso de la funcion escalon nos permite representar a lafuncion (4.229), como
f(t) = u(t)f0(t) + u(t− t1)[f1(t)− f0(t)]. (4.230)
Supongamos ahora que tenemos tres funciones dadas de la siguiente forma
f(t) =
f0(t) para 0 ≤ t < t1f1(t) para t1 ≤ t < t2f2(t) para t > t2
(4.231)
Esto es equivalente a la siguiente expresion
f(t) = u(t)f0(t) + u(t− t1)[f1(t)− f0(t)] + u(t− t2)[f2(t)− f1(t)] (4.232)
Ahora nos preguntamos; como podemos usar (4.230), y (4.232), para determinar la transformada deLaplace L[f(t)] de funciones continuas por partes? Para esto existen dos teoremas que nos facilitaranlos calculos.

4.7. TRANSFORMADA DE LAPLACE PARA FUNCIONES DISCONTINUAS 209
Teorema 4.7.2. Sea f(t) ∈ [0,∞). Supongase que τ ≥ 0 y L[f(t+τ)] existe para <s > σ0. Entonces,L[u(t− τ)f(t)] existe para <s > σ0 y
L[u(t− τ)f(t)] = e−sτL[f(t+ τ)] (4.233)
4 Por definicion
L[u(t− τ)f(t)] =∫ ∞
0
u(t− τ)f(t)e−stdt. (4.234)
Tomando en cuenta la definicion del escalon desplazado, tenemos
L[u(t− τ)f(t)] =∫ τ
0
(0)e−stdt+∫ ∞
τ
f(t)e−stdt (4.235)
La primer integral de la derecha es cero. Introduciendo la nueva variables t′ = t − τ en la segundaintegral, resulta
L[u(t− τ)f(t)] =∫ ∞
0
f(t′ + τ)e−s(t′+τ)dt′ = e−sτ
∫ ∞
0
f(t′ + τ)e−st′dt′. (4.236)
Cambiando la etiqueta de la variable de integracion en la ultima integral de t′ a t, obtenemos
L[u(t− τ)f(t)] = e−sτ
∫ ∞
0
f(t+ τ)e−stdt = e−sτL[f(t+ τ)]. 4 (4.237)
Ejemplo 2:
Hallar la transformada de Laplace
L[u(t− 2)(t+ 1)] (4.238)
Solucion:
Para usar el teorema anterior, 4.7.2, identificamos τ = 2 y f(t) = t + 1, entonces f(t + 2) =t+ 2 + 1 = t+ 3 y la transformada de Laplace
L[t+ 3] =1s2
+3s. (4.239)
El teorema 4.7.2 implica
L[u(t− 2)(t+ 1)] = e−2s( 1s2
+3s
). (4.240)
Ejemplo 4:
Hallar la transformada de Laplace de la funcion continua por partes
f(t) =
2, 0 < t < π0, π < t < 2πsen t, t > 2π
. (4.241)
Solucion:
Escribamos la funcion (4.241), en terminos de la funcion escalon, segun (4.232), obtenemos
f(t) = 2u(t)− 2u(t− π) + u(t− 2π) sen (t− 2π). (4.242)

210 CAPITULO 4. TRANSFORMADA DE LAPLACE
En esta ecuacion, por comodidad, hemos escrito sen t = sen (t− 2π), esto es valido, debido a que lafuncion seno es periodica de periodo 2π.
Aplicando la transformada de Laplace en (4.242), se tiene
L[f(t)] = 2L[u(t)]− 2L[u(t− π)] + L[u(t− 2π) sen (t− 2π)] =2s− 2e−πs
s+e−2πs
s2 + 1, (4.243)
donde hemos aplicado los resultados obtenidos en (4.211, 4.214) y el teorema 4.7.1.
Ejemplo 3:
Hallar la funcion f(t), correspondiente a la transformada de Laplace
F (s) =2s2− 2e−2s
s2− 4e−2s
s+se−πs
s2 + 1. (4.244)
Solucion:
Aplicando la transformada inversa de Laplace, se tiene
f(t) = L−1[F (s)] = 2L−1[ 1s2
]− 2L−1
[e−2s
s2
]− 4L−1
[e−2s
s
]+ L−1
[ se−πs
s2 + 1
]. (4.245)
Haciendo uso del teorema 4.7.1., resulta
f(t) = 2t−2u(t−2)[t−2]−4u(t−2)+u(t−π) cos (t− π) = 2t−2u(t−2)t−u(t−π) cos t. (4.246)
Este mismo resultado lo podemos escribir en su forma equivalente como
f(t) =
2t, 0 < t < 2,0, 2 < t < π,− cos t, t > π.
(4.247)
4.8. Diferenciacion e Integracion de la Transformadade Laplace
En las secciones anteriores hemos discutido la solucion de ecuaciones diferenciales con coeficientesconstantes con condiciones iniciales. Las propiedades de la transformada de Laplace estudiadas hastael momento no son suficientes para resolver ecuaciones diferenciales con coeficientes polinomiales enterminos de la variable independiente. No obstante, el concepto de diferenciacion de la transformadade Laplace nos ayuda a resolver algunos problemas de esta ındole.
Teorema 4.8.1. (diferenciacion de la transformada de Laplace) Si f(t) es una funcion continuapor partes para todo t ≥ 0 y es de orden exponencial cuando t→∞, entonces
L[−tf(t)] = dF (s)ds y L[tnf(t)] = (−1)n dnF (s)
dsn <s > σ0 (4.248)
donde F (s) = L[f(t)]
4 De las condiciones del teorema se tiene que la transformada de Laplace de la funcion f(t)existe, es decir, tiene lugar la integral impropia∫ ∞
0
f(t)e−stdt = F (s). (4.249)

4.8. DIFERENCIACION E INTEGRACION DE LA TRANSFORMADA DE LAPLACE 211
Entonces, tomando la derivada respecto a s, obtenemos
dF
ds=
d
ds
∫ ∞
0
f(t)e−stdt =∫ ∞
0
f(t)d
dse−stdt = −
∫ ∞
0
tf(t)e−stdt = L[−tf(t)]. (4.250)
Concluimos que
L[tf(t)] = −dFds. (4.251)
Para el caso L[t2f(t)], tenemos
L[t2f(t)] = L[ttf(t)] = − d
ds[Ltf(t)] = − d
ds
[− dF (s)
ds
]= (−1)2
d2F (s)ds2
. (4.252)
Luego, por induccion se puede demostrar que
L[tnf(t)] = (−1)n dnF (s)dsn
∀n = 1, 2, 3, . . . 4 (4.253)
De la expresion (4.248), obtenemos
L−1[F ′(s)] = −tf(t), L−1[F (n)(s)] = (−1)ntnf(t). (4.254)
Ejemplo 1:
Calcular la transformada de Laplace de la funcion
f(t) = t2 sen(ωt). (4.255)
Solucion:
Usando el teorema anterior y la tabla de transformadas, tenemos
L[t2 sen (ωt)] = (−1)2d2
ds2
[ ω
s2 + ω2
]=
d
ds
[− 2ωs
(s2 + ω2)2]
=6ωs2 − 2ω3
(s2 + ω2)3(4.256)
Ejemplo 2:
Calcular la transformada de Laplace de la funcion f(t) = t2e−2t.
Solucion:
Hagamos uso del teorema anterior y de la formula L[e−2t] = 1s+2 . Entonces, tenemos
L[t2e−2t] = (−1)2d2
ds2
[ 1s+ 2
]= − d
ds
[ 1(s+ 2)2
]=
2(s+ 2)3
. (4.257)
Ejemplo 3:
Calcular la transformada de Laplace de la funcion f(t) = t2 cos(3t).
Solucion:
Usando la formulaL[cos(ωt)] =
s
s2 + ω2

212 CAPITULO 4. TRANSFORMADA DE LAPLACE
Para nuestro caso, tenemos que ω = 3, entonces
L[cos(3t)] =s
s2 + 9= F (s). (4.258)
Entonces
L[t2 cos(3t)] = (−1)2d2
ds2
[ s
s2 + 9
]=
d
ds
[ 9− s2
(s2 + 9)2]
=−2s(s2 + 9)2 − (9− s2)(s2 + 9)(4s)
(s2 + 9)4
=2s3 − 54s(s2 + 9)3
=2s(s2 − 27)(s2 + 9)3
. (4.259)
Lo util del teorema esta mas que claro, ya que hemos reducido en gran medida el calculo. La ecuacion(4.254), es util para hallar una transformada inversa cuando la derivada de la transformada es masfacil de manipular que la transformada misma.
El teorema anterior muestra que la diferenciacion de la transformada F (s) respecto a s co-rresponde a la multiplicacion de t por f(t), junto con un cambio de signo. Desde luego, es de esperarque la integracion de F (s) corresponda a una division de f(t) entre t. Esto lo afirma el siguienteteorema.
Teorema 4.8.2. (integracion de la transformada de Laplace) Sea f(t) una funcion continua porpartes en [0,∞) y de orden exponencial. Entonces, la transformada de Laplace de la integral de f(t)esta dada por la expresion
L[ ∫ t
0f(τ)dτ
]= F (s)
s (4.260)
4 De la definicion de transformada de Laplace, tenemos
L[ ∫ t
0
f(τ)dτ]
=∫ ∞
0
[ ∫ t
0
f(τ)dτ]e−stdt. (4.261)
Integrando por partes, definiendo
u =∫ t
0
f(τ)dτ → du = f(t)dt,
dv = e−stdt → v = −1se−st. (4.262)
Obtenemos
L[ ∫ t
0
f(t)dt]
= −e−st
s
∫ t
0
f(τ)dτ∣∣∣∞0
+1s
∫ ∞
0
f(t)e−stdt. (4.263)
El primer termino de la derecha de (4.263), desaparece, ya que e−st → 0 cuando t → ∞. Enconsecuencia
L[ ∫ t
0
f(τ)dτ]
=F (s)s
. 4 (4.264)
Para la transformada inversa, tenemos
L−1[1sF (s)
]=
∫ t
0
f(τ)dτ. (4.265)

4.8. DIFERENCIACION E INTEGRACION DE LA TRANSFORMADA DE LAPLACE 213
Ejemplo 1:
Hallar la funcion f(t) si su transformada de Laplace es
F (s) =3
s2 + s. (4.266)
Solucion:
Para poder usar el teorema 4.8.2, escribamos la expresion (4.266), de la siguiente manera
F (s) =3
s(s+ 1)=
3sG(s), (4.267)
dondeG(s) =
1s+ 1
. (4.268)
Luego, con ayuda de la tabla 4.4-I calculamos la transformada inversa de la expresion
g(t) = L−1[G(s)] = L−1( 1s+ 1
)= e−t. (4.269)
Entonces, de la formula (4.265), tenemos
f(t) = L−1[F (s)
]= L−1
[3sG(s)
]= 3
∫ t
0
e−τdτ (4.270)
Calculando la integral, obtenemos el resultado final
f(t) = 3(1− e−t
). (4.271)
Ejemplo 2:
Hallar la funcion f(t) correspondiente a la transformada
F (s) =4
s3 + 4s. (4.272)
Solucion:
Para poder usar el teorema 4.8.2, escribamos la transformada (4.272), de la siguiente manera
F (s) =4
s3 + 4s=
(2)(2)s(s2 + 4)
=2sG(s), (4.273)
dondeG(s) =
2s2 + (2)2
. (4.274)
La transformada inversa de (4.274) es
g(t) = L−1[ 2s2 + (2)2
]= sen 2t. (4.275)
Entonces, aplicando el teorema 4.8.2, a la expresion (4.272), tenemos
f(t) = L−1[2sG(s)
]= 2
∫ t
0
sen 2τdτ = − cos 2τ∣∣∣t0
= 1− cos 2t. (4.276)

214 CAPITULO 4. TRANSFORMADA DE LAPLACE
Ejemplo 3:
Hallar la funcion f(t) si
F (s) =1
s(s2 + ω2). (4.277)
Solucion:
SeaF (s) =
1s(s2 + ω2)
=1sG(s), (4.278)
dondeG(s) =
1s2 + ω2
. (4.279)
La transformada inversa de esta expresion es
g(t) = L−1[G(s)
]= L−1
[ 1s2 + ω2
]=
1ωL−1
[ ω
s2 + ω2
]=
1ω
senωt. (4.280)
Del teorema 4.8.2, tenemos
f(t) = L−1[1sG(s)
]=
1ω
∫ t
0
senωτdτ =1ω2
cosωτ∣∣∣t0
=1ω2
(cosωt− 1). (4.281)
4.9. Ecuaciones Diferenciales con Fuentes Discontinuas
En las aplicaciones, las funciones discontinuas (continuas por partes) aparecen de manera natural.Por ejemplo, el encendido y apagado de un interruptor, el golpe a un balon, etc., son fenomenosdiscontinuos. Las ecuaciones diferenciales que contienen funciones discontinuas son difıciles de trataranalıticamente usando los metodos previos. La transformada de Laplace es una herramienta poderosapara este tipo de ecuaciones diferenciales, ya que facilita mucho el tratamiento de las funcionesdiscontinuas (seccion 4.7). El proposito de esta seccion es: el analisis de ecuaciones diferenciales confunciones discontinuas como fuentes.
En otras palabras, aprenderemos a resolver ecuaciones de la forma
ay′′ + by′ + cy = f(t), y(0) = c0, y′(0) = c1, (4.282)
donde a, b y c son constantes (a 6= 0) y f(t) tiene un numero finito de discontinuidades en elintervalo [0,∞), es decir, tiene la forma de (4.231). Este tipo de problemas surge en situacionesdonde la entrada a un sistema fısico experimenta cambios instantaneos, por ejemplo, cuando se abreo se cierra un interruptor, o cuando las fuerzas que actuan en un sistema cambian de manera rapida.
La receta para resolver este tipo de ecuaciones es la siguiente:
Primer paso. Debemos representar a la funcion f(t) en forma de combinacion de funcionesescalon como en (4.232).
Segundo paso. Aplicar la transformada de Laplace a toda la ecuacion diferencial.
Tercer paso. Hacer uso de la transformada de Laplace para las derivadas y tomar en cuenta lascondiciones iniciales. Para calcular la transformada de Laplace de la funcion (fuente), continuapor partes, se hace uso de los dos teoremas 4.7.1 y 4.7.2., antes vistos

4.9. ECUACIONES DIFERENCIALES CON FUENTES DISCONTINUAS 215
Cuarto paso. Despejar Y (s) y calcular su inversa con el objetivo de hallar la funcion y(t), lacual sera la solucion de la ecuacion diferencial (4.282).
Ejemplo 1:
Resolver la siguiente ecuacion diferencial de primer orden con una discontinuidad
y′ + 9y = u(t− 5), y(0) = −2. (4.283)
Aplicando la transformada de Laplace, resulta
L[y′] + 9L[y] = L[u(t− 5)]. (4.284)
Luego, usando el teorema 4.3.1, y tomando en cuenta la condicion inicial, tenemos
sY (s) + 2 + 9Y (s) =e−5s
s. (4.285)
Factorizando y despejando a Y (s), obtenemos
Y (s) = − 2s+ 9
+e−5s
s(s+ 9). (4.286)
Para encontrar la solucion y(t), debemos calcular la transformada inversa, esto es
y(t) = −2L−1[ 1s+ 9
]+ L−1
[ e−5s
s(s+ 9)
]. (4.287)
Desarrollando en fracciones parciales la expresion
1s(s+ 9)
=A
s+
B
s+ 9. (4.288)
Tenemos, As+ 9A+BS = 1, de donde, A = 1/9 y B = −1/9. Entonces
e−5s
s(s+ 9)=e−5s
9s− e−5s
9(s+ 9), (4.289)
y su transformada inversa es
L−1[ e−5s
s(s+ 9)
]=
19L−1
[e−5s
s
]− 1
9L−1
[ e−5s
s+ 9
]=
19u(t− 5)− 1
9u(t− 5)e−9(t−5).
Luego, tomando en cuenta este resultado y usando la tabla 4.4-I, para calcular el primer terminode la derecha de (4.287), tenemos la solucion de la ecuacion (4.283),
y(t) = −2e−9t +19u(t− 5)− 1
9u(t− 5)e−9(t−5). (4.290)
Ejemplo 2:
Resolver el problema de valor inicial
y′ + y = u(t− 2)e−2(t−2), y(0) = 1. (4.291)
Solucion:

216 CAPITULO 4. TRANSFORMADA DE LAPLACE
Aplicando la transformada de Laplace
L[y′] + L[y] = L[u(t− 2)e−2(t−2)], (4.292)
obtenemos
sY (s)− y(0) + Y (s) =e−2s
s+ 2. (4.293)
Sustituyendo la condicion inicial y factorizando
Y (s)[s+ 1] = 1 +e−2s
s+ 2. (4.294)
Despejando Y(s), resulta
Y (s) =1
s+ 1+
e−2s
(s+ 1)(s+ 2). (4.295)
El ultimo termino lo podemos desarrollar en fracciones parciales, como resultado tenemos
Y (s) =1
s+ 1+e−2s
s+ 1− e−2s
s+ 2. (4.296)
Por ultimo, aplicando la transformada inversa de Laplace y haciendo uso de la tabla 4.4-I y delteorema 4.7.1, tenemos el resultado final
y(t) = L−1[Y (s)] = L−1[ 1s+ 1
]+ L−1
[ e−2s
s+ 1
]− L−1
[ e−2s
s+ 2
]= e−t + u(t− 2)e−(t−2) − u(t− 2)e−2(t−2)
= e−t + u(t− 2)(e−(t−2) − e−2(t−2)
). (4.297)
Ejemplo 3:
Usar la transformada de Laplace para resolver la ecuacion diferencial con valores iniciales
y′′ + y = f(t) = 3 0 ≤ t < π,
0 t ≥ π. y(0) = 0, y′(0) = 0. (4.298)
Solucion:
Para resolver esta ecuacion hagamos uso de la funcion escalon y los teoremas antes mencionados.Primero, desarrollemos la funcion f(t) en funcion del escalon, esto es
f(t) = 3− 3u(t− π). (4.299)
Ahora aplicamos la transformada de Laplace a la ecuacion (4.298), tenemos
L[y′′] + L[y] = 3L[1]− 3L[u(t− π)]. (4.300)
Haciendo uso de las formulas para la transformada de Laplace de las derivadas, y considerando lascondiciones iniciales, tenemos
s2Y (s) + Y (s) =3s− 3e−πs
s. (4.301)
Factorizando y despejando a Y (s), obtenemos
Y (s) =3
s(s2 + 1)− 3e−πs
s(s2 + 1). (4.302)

4.9. ECUACIONES DIFERENCIALES CON FUENTES DISCONTINUAS 217
Desarrollando en fracciones parciales la expresion que esta en el denominador de (4.302), esto nosda como resultado
1s(s2 + 1)
=A
s+Bs+ C
s2 + 1=
1s− s
s2 + 1. (4.303)
Ası que, tenemos
Y (s) =3s− 3ss2 + 1
− 3se−πs +
3ss2 + 1
e−πs. (4.304)
Por ultimo, calculamos la transformada inversa de esta expresion. El resultado final es
y(t) = L−1[3s− 3ss2 + 1
− 3se−πs +
3ss2 + 1
e−πs]
=
= 3[1− cos t
]u(t)− 3u(t− π)
[1− cos(t− π)
]. (4.305)
Esta es la solucion del problema con valor inicial.
Ejemplo 4:
Resolver la siguiente ecuacion diferencial
y′′ + 4y = 3u(t− 5) sen(t− 5), y(0) = 1, y′(0) = 0. (4.306)
Solucion:
Aplicamos la transformada de Laplace
L[y′′] + 4L[y] = 3L[u(t− 5) sen(t− 5)]. (4.307)
De donde, obtenemos
s2Y (s)− sy(0)− y′(0) + 4Y (s) =3e−5s
s2 + 1. (4.308)
Sustituyendo las condiciones iniciales y factorizando
(s2 + 4)Y (s) =3e−5s
s2 + 1+ s. (4.309)
Luego, despejando Y (s), resulta
Y (s) =3e−5s
(s2 + 1)(s2 + 4)+
s
s2 + 4. (4.310)
Para obtener la solucion de la ecuacion (4.306), debemos tomar la transformada inversa
y(t) = L−1[ s
s2 + 4
]+ L−1
[ 3e−5s
(s2 + 4)(s2 + 1)
]. (4.311)
Tomando en cuenta el resultado (4.207), podemos escribir
y(t) = L−1[ s
s2 + 4
]− L−1
[ e−5s
s2 + 4
]+ L−1
[ e−5s
s2 + 1
]. (4.312)
Vamos a calcular por separado las transformadas inversas. Haciendo uso de la tabla 4.4-I y delteorema 4.7.1, tenemos
L−1[ s
s2 + 4
]= cos 2t.

218 CAPITULO 4. TRANSFORMADA DE LAPLACE
L−1[ e−5s
s2 + 4
]=
12u(t− 5) sen 2(t− 5).
L−1[ e−5s
s2 + 1
]= u(t− 5) sen(t− 5).
Sustituyendo estos resultados en (4.312), obtenemos el resultado final
y(t) = cos 2t+ u(t− 5) sen(t− 5)− 12u(t− 5) sen 2(t− 5). (4.313)
Ejemplo 5:
Hallar la solucion del problema con valores iniciales
y′′ + 2y′ + 5y = 1− u(t− 7), y(0) = y′(0) = 0. (4.314)
Solucion:
Aplicando la transformada de Laplace
L[y′′] + 2L[y′] + 5L[y] = L[1− u(t− 7)], (4.315)
resulta
s2Y (s)− sy(0)− y′(0) + 2[sY (s)− y(0)] + 5Y (s) =1s− e−7s
s. (4.316)
Poniendo las condiciones iniciales, factorizando y despejando, obtenemos la ecuacion
Y (s) =1
s(s2 + 2s+ 5)− e−7s
s(s2 + 2s+ 5). (4.317)
Desarrollando en fracciones parciales la expresion
1s(s2 + 2s+ 5)
=A
s+
Bs+ C
s2 + 2s+ 5. (4.318)
Resulta A = 15 , B = − 1
5 y C = − 25 . Sustituyendo en (4.318), obtenemos
1s(s2 + 2s+ 5)
=15s− s+ 2
5(s2 + 2s+ 5)=
15s− s+ 2
5[(s+ 1)2 + 4]. (4.319)
Entonces, de la ecuacion (4.317), tenemos
Y (s) =15s− s+ 2
5[(s+ 1)2 + 4]− e−7s
5s+
e−7s(s+ 2)5[(s+ 1)2 + 4]
. (4.320)
El ultimo termino lo podemos escribir como
(s+ 2)5[(s+ 1)2 + 4]
=s+ 1 + 1
5[(s+ 1)2 + 4]=
s+ 15[(s+ 1)2 + 4]
+2
5 · 2[(s+ 1)2 + 4](4.321)
Entonces, la expresion (4.320), tiene la forma
Y (s) =15s− s+ 1
5[(s+ 1)2 + 4]− 2
5 · 2[(s+ 1)2 + 4]− e−7s
5s+e−7s(s+ 1)(s+ 1)2 + 4
+2e−7s
5 · 2[(s+ 1)2 + 4]. (4.322)

4.9. ECUACIONES DIFERENCIALES CON FUENTES DISCONTINUAS 219
Aplicando a transformada inversa
y(t) = L−1[ 15s− s+ 1
5[(s+ 1)2 + 4]− 2
5 · 2[(s+ 1)2 + 4]
]+
+ L−1[− e−7s
5s+
e−7s(s+ 1)5[(s+ 1)2 + 4]
+2e−7s
5 · 2[(s+ 1)2 + 4]
]. (4.323)
Usando las tablas 4.4-I, tenemos para el primer termino
L−1[ 15s− s+ 1
5[(s+ 1)2 + 4]− 2
5 · 2[(s+ 1)2 + 4]
]=
15− e−t
5
(cos 2t+
12
sen 2t). (4.324)
y para el segundo termnino
L−1[− e−7s
5s+
e−7s(s+ 1)5[(s+ 1)2 + 4]
+2e−7s
5 · 2[(s+ 1)2 + 4]
]= −1
5u(t− 7) + (4.325)
+15u(t− 7)e−(t−7)
[cos 2(t− 7) +
12
sen 2(t− 7)].
Sustituyendo los resultados de (4.324) y (4.325) en (4.323), obtenemos la solucion de (4.314),
y(t) =15− e
−t
5
(cos 2t+
12
sen 2t)−1
5u(t−7)+
15u(t−7)e−(t−7)
[cos 2(t− 7)+
12
sen 2(t− 7)]. (4.326)
Observacion:
La ecuacion (4.314), puede modelar una masa unitaria m = 1 unida a un resorte con constantek = 2, la cual se desliza sobre una superficie con coeficiente de amortiguamiento igual a 2. Lascondiciones iniciales las podemos interpretar de la siguiente manera: en el tiempo t = 0 la masa semantiene en reposo en y = 0. Cuando t < 7, la superficie se inclina de tal manera que la gravedadproporciona una fuerza unitaria (en este caso en la parte derecha de (4.314) aparecera la unidad 1)que alarga al resorte. En el tiempo t = 7, la superficie vuelve a nivelarse ( es decir, la parte derechade (4.314) sera cero).
Ejemplo 6: Resolver el siguiente problema con valores iniciales
y′′ + 2y = r(t) =
1 para 0 ≤ t < 10 para t > 1 . (4.327)
Figura 4.5: Onda cuadrada r(t).

220 CAPITULO 4. TRANSFORMADA DE LAPLACE
Este problema puede representar la respuesta de un sistema no amortiguado a una onda cuadradasencilla figura 4.5.
Solucion:
Antes que nada escribamos r(t) en funcion de las funciones escalon, esto es, como
r(t) = u(t) + u(t− 1). (4.328)
Sustituyendo en (4.327) y aplicando la transformada de Laplace, obtenemos
L[y′′] + 2L[y] = L[u(t)] + L[u(t− 1)]. (4.329)
De donde, resulta
s2Y (s)− sy(0)− y′(0) + 2Y (s) =1s
+e−s
s. (4.330)
Sustituyendo las condiciones iniciales y despejando Y (s), tenemos
Y (s) =1
s(s2 + 2)+
e−s
s(s2 + 2). (4.331)
Desarrollando en fracciones parciales la expresion
1s(s2 + 2)
=A
s+Bs+ C
s2 + 2, (4.332)
tenemos
A+B = 0,2A = 1, (4.333)C = 0.
De donde, C = 0, A = 1/2 y B = −1/2. Entonces
1s(s2 + 2)
=12s− s
2(s2 + 2), (4.334)
Sustituyendo en (4.331), obtenemos
Y (s) =12s− s
2(s2 + 2)+e−s
2s− e−ss
2(s2 + 2). (4.335)
Nos queda por calcular la transformada inversa
y(t) = L−1[Y (s)] =12L−1
[1s
]− 1
2L−1
[ s
s2 + 2
]+
12L−1
[e−s
s
]− 1
2L−1
[ e−ss
s2 + 2
]. (4.336)
Usando las formulas de la tabla 4.4.-I y el teorema 4.7.1, tenemos
L−1[1s
]= 1,
L−1[ s
s2 + 2
]= L−1
[ s
s2 + (√
2)2
]= cos
√2t,
L−1[e−s
s
]= u(t− 1), (4.337)
L−1[ e−ss
s2 + (√
2)2
]= L−1
[e−sF (s)
]=
(F (s) = s
s2+(√
2)2= cos
√2t
por el teorema 4 · 7 · 1
)= cos
√2(t− 1)u(t− 1).

4.10. ECUACIONES DIFERENCIALES CON IMPULSOS 221
Sustituyendo estos resultados en (4.336), tenemos el resultado final
y(t) =12
(1− cos
√2t
)− 1
2
(1− cos
√2(t− 1)
)u(t− 1). (4.338)
Este mismo resultado lo podemos escribir de la siguiente manera
y(t) =
12
(1− cos
√2t
)para 0 ≤ t < 1
12 cos
√2(t− 1)− 1
2 cos√
2t para t > 1(4.339)
Como podemos observar, la solucion y(t) representa una composicion de oscilaciones armonicas.
4.10. Ecuaciones Diferenciales con Impulsos
Hemos aprendido a resolver ecuaciones diferenciales del tipo
ad2y
dt2+ b
dy
dt+ cy(t) = f(t), y(t0) = y0, y′(t0) = y′0, (4.340)
donde a, b, c son constantes, y la funcion f(t) es continua o continua por partes en el intervalo [0,∞).
En muchas de las aplicaciones surgen problemas de valor inicial donde la funcion f(t) representauna fuerza que es muy grande durante un tiempo muy corto y cero en el resto del tiempo. A estasfuerza se les conoce como impulsivas o forzamiento de impulso, y ocurren, por ejemplo, cuando dosobjetos entran en colision. Debido a que no es posible representar a estas fuerzas como funcionescontinuas o continuas por partes, debemos construir un modelo matematico distinto para estudiarlas.
Sea la ecuacion
ad2y
dt2+ b
dy
dt+ cy(t) = g(t), (4.341)
donde a, b, c son constantes y la funcion g(t) es una funcion muy grande en un tiempo extremada-mente corto. Esto puede ser como el golpe de un bate a una pelota de beis-boll. La funcion se puederepresentar como
g(t) =
muy grande, cuando t = t00 cuando t 6= t0.
(4.342)
Para precisar mas y poder obtener una solucion, necesitamos algun tipo de formula para la funciong(t). Para esto supongamos que la fuerza actua en un intervalo de tiempo, de t0 − ∆t a t0 + ∆tdurante un tiempo pequeno ∆t > 0, y que la fuerza es la constante k en este intervalo de tiempo.Entonces, la funcion de impulso tiene la forma
g∆t(t) =k, t0 −∆t ≤ t ≤ t0 + ∆t0, otros valores. (4.343)
Con esta seleccion de k, el area sobre la grafica de g∆t(t) es la misma que se halla en un rectangulocon base 2∆t y altura 1
2∆t . Es decir, el area es la unidad sin importar que intervalo ∆t elijamos(ver figura). Como el intervalo de tiempo que dura la fuerza es extremadamente pequeno, podemosanalizar el caso ∆t→ 0. Esto significa que estamos comprimiendo la misma cantidad de fuerza en un”punto”. Entonces, una fuerza instantanea podrıa representarse tomando el lımite cuando ∆t→ 0.Sin embargo,
lım∆t→0
g∆t(t), (4.344)

222 CAPITULO 4. TRANSFORMADA DE LAPLACE
es muy confuso. Ya que para cualquier t 6= t0, el lımite de g∆t(t), cuando ∆t→ 0 es cero, debido aque para un ∆t muy pequeno, el tiempo t esta fuera del intervalo en que g∆t(t) es positiva. Por otrolado,
lım∆t→0
g∆t(t0), (4.345)
no existe, ya que g∆t(t0) →∞, cuando ∆t→ 0. A la ”funcion”δ(t− t0), definida como
δ(t− t0) = lım∆t→0
g∆t(t), (4.346)
se le conoce como funcion delta de Dirac . Esta funcion es cero para todos los valores de t exceptopara t = t0, donde es infinita.
Debemos tener en cuenta que δ(t − t0) no es una funcion en el sentido usual, ya que segun la”definicion”implica que δ(t− t0) = 0, si t 6= t0, mientras que∫ t0
t0
δ(t− t0)dt = 1. (4.347)
Del calculo sabemos que ninguna funcion cumple estas propiedades, no obstante existe una rama delas matematicas conocida como teorıa de distribuciones, en la cual la definicion se puede hacer demanera rigurosa.
La idea es poder resolver ecuaciones diferenciales del tipo
ad2y
dt2+ b
dy
dt+ cy(t) = δ(t− t0), y(t0) = y0, y′(t0) = y′0, (4.348)
donde
δ(t− t0) =
0, t 6= t0∞, t = t0.
(4.349)
En la siguiente seccion hallaremos la transformada de Laplace de la funcion delta de Dirac y entonces,estaremos listos para resolver ecuaciones del tipo (4.348).
4.11. Transformada de Laplace de la Funcion Delta de Dirac
Para evaluar la transformada de Laplace de la funcion delta de Dirac, hagamos ∆t > 0, entonces
L[g∆t] =∫ ∞
0
g∆t(t)e−stdt =∫ t0+∆t
t0−∆t
12∆t
e−stdt =( 1
2∆t
)(e−st
−s
)∣∣∣t0+∆t
t0−∆t=
=( 1
2∆t
)(− e−s(t0+∆t) − e−s(t0+∆t)
s
)=
(e−4s
s
)(es∆t − e−s∆t
2∆t
). (4.350)
Luego, tomando el lımite ∆t→ 0, obtenemos
lım∆t→0
L[g∆t] = lım∆t→0
(e−st0
s
)(es∆t − e−s∆t
2∆t
)=
(e−st0
s
)lım
∆t→0e−s∆t
(e2s∆t − 12∆t
)= e−st0 . (4.351)
El lımite de la transformada de Laplace de g∆t cuando ∆t → 0 es una funcion bien definida. Porconsiguiente, la ”funcion”delta de Dirac la podemos definir como
δ(t− t0) =
0, t 6= t0∞, t = t0,
(4.352)

4.11. TRANSFORMADA DE LAPLACE DE LA FUNCION DELTA DE DIRAC 223
y su transformada de Laplace esL[δ(t− t0)] = e−st0 . (4.353)
Si t0 = 0, entonces, tenemos que la transformada de Laplace de la funcion delta de Dirac δ(t) es
L[δ(t)] = 1. (4.354)
Ejemplo 1:
Supongamos que tenemos una masa unitaria unida a un resorte, cuya constante es 9 y resbalasobre una superficie sin friccion. Supongamos, ademas, que para t < 0, la masa esta en el punto deequilibrio y en reposo en x = 0. Cuando t = 0, a la masa se le da un fuerte golpe en la direccion xpositiva. Hallar la ley que gobierna el movimiento de este sistema masa-resorte.
Solucion:
De las condiciones del problema, tenemos que en t = 0, x(0) = 0, pero x′(0) esta indefinidadebido a que la aceleracion en este punto es infinita. Para indicar que antes de t = 0 la masa estabaen reposo, escribimos la condicion inicial x′(0) = 0−. Tenemos, entonces, que la ecuacion diferencialque describe el movimiento de nuestro sistema es
d2x
dt2+ 9x = δ(t), x(0) = 0, x′(0) = 0−. (4.355)
Tomando la transformada de Laplace en ambos lados de la ecuacion (4.355), resulta
L[d2x
dt2
]+ 9L[x] = L[δ(t)]. (4.356)
Esta expresion la podemos escribir como
s2X(s)− sx(0)− x′(0) + 9X(s) = 1, (4.357)
donde hemos usado el resultado(4.354). Sustituyendo las condiciones iniciales y despejando X(s),obtenemos la expresion
X(s) =1
s2 + 9=
1s2 + (3)2
. (4.358)
La transformada inversa la escribimos de la siguiente manera
x(t) = L−1[ 1s2 + (3)2
]=
13L−1
[ 3s2 + (3)2
](4.359)
Usando la formula L−1[
ωs2+ω2
]= senωt de la tabla 4,4− 2, resulta
x(t) =13
sen 3t =13
sen(3t+ 2π
)(4.360)
Hemos obtenido la ley de movimiento para un sistema masa-resorte, para el cual la amplitud esA = 1/3, la frecuencia ω = 3 y el periodo T = 2π.
Ejemplo 2:
Resolver el siguiente problema con valores iniciales
y′ + 2y = δ(t− 2), y(0) = 0. (4.361)
Solucion:

224 CAPITULO 4. TRANSFORMADA DE LAPLACE
Aplicando la transformada de Laplace, tenemos
L[y′] + 2L[y] = L[δ(t− 2)], y(0) = 0. (4.362)
Usando la transformada de Laplace para la derivada, obtenemos
sY (s)− y(0) + 2Y (s) = e−2s (4.363)
Sustituyendo las condiciones iniciales y despejando, resulta
Y (s) =e−2s
s+ 2. (4.364)
Tomando la transformada inversa de esta expresion
y(t) = L−1[ e−2s
s+ 2
]. (4.365)
Usando la tabla 4.4-I y el segundo teorema de desplazamiento 4.7.1, obtenemos el resultado final
y(t) = u(t− 2)e−2(t−2). (4.366)
Ejemplo 3:
Resolver el siguiente problema de valor inicial
y′′ + 2y′ − 3y = δ(t− 1)− 3δ(t− 4), y(0) = 0, y′(0) = 0. (4.367)
Solucion:
Aplicando la transformada de Laplace
L[y′′ + 2L[y′]− 3L[y] = L[δ(t− 1)]− 3L[δ(t− 4)], (4.368)
tenemoss2Y (s)− sy(0)− y′(0) + 2[sY (s)− y(0)] + 3Y (s) = e−s − 3e−4s. (4.369)
Tomando en cuenta las condiciones iniciales y despejando Y (s), resulta
Y (s) =e−s
s2 + 2s− 3− 3e−4s
s2 + 2s− 3. (4.370)
Desarrollemos en fracciones parciales la expresion
1s2 + 2s− 3
=1
(s+ 3)(s− 1)=
A
s+ 3+
B
s− 1. (4.371)
Resultan las ecuaciones
A+B = 03B −A = 1. (4.372)
Las soluciones de este sistema son A = −1/4 y B = 1/4. Sustituyendo estos valores en (4.371) yluego en (4.370), tenemos
Y (s) = −14e−s
s+ 3+
14e−s
s− 1+
34e−4s
s+ 3− 3
4e−4s
s− 1. (4.373)

4.12. TEOREMA DE CONVOLUCION 225
Ahora, se toma la transformada inversa de (4.373), esto es
y(t) = L−1[Y (s)] = −14L−1
( e−s
s+ 3
)+
14L−1
( e−s
s− 1
)+
34L−1
( e−4s
s+ 3
)− 3
4L−1
( e−4s
s− 1
). (4.374)
Ahora usando la tabla 4.4-I y el teorema 4.7.1, tenemos el resultado final
y(t) =14u(t− 1)
(e(t−1) − e−3(t−1)
)+
34u(t− 4)
(e−3(t−4) − e(t−4)
). (4.375)
Ejemplo 4:
Hallar la respuesta del sistema amortiguado masa-resorte representado por la ecuacion
y′′ + 3y′ + 2y = δ(t− 3), y(0) = 0, y′(0) = 0. (4.376)
Esta ecuacion y sus condiciones iniciales, nos dicen que el sistema se hallaba en reposo y en el tiempot = 0, el sistema recibio un fuerte impacto.
Solucion
Aplicamos la transformada de Laplace a ambos lados de la ecuacion (4.376)
L[y′′] + 3L[y′] + 2L[y] = L[δ(t− 3)]. (4.377)
Tomando en cuenta las condiciones iniciales, resulta
s2Y (s) + 3sY (s) + 2Y (s) = e−3s. (4.378)
Factorizando, tenemos
Y (s) =e−3s
s2 + 3s+ 2. (4.379)
Podemos desarrollar en fracciones parciales la expresion
1s2 + 3s+ 2
=1
(s+ 2)(s+ 1)=
A
s+ 2+
B
s+ 1. (4.380)
Los valores de las constantes son A = −1 y B = 1. Entonces, sustituyendo estos valores en (4.380)y a su vez en (4.379), tenemos
Y (s) = − e−3s
s+ 2+e−3s
s+ 1. (4.381)
Ahora, aplicamos la transformada inversa de Laplace, esto es
y(t) = L−1[Y (s)] = −L−1( e−3s
s+ 2
)+ L−1
( e−3s
s+ 1
). (4.382)
Aplicando el teorema 4.7.1 y la tabla 4.4-I, el resultado final es
y(t) = u(t− 3)(e−(t−3) − e−2(t−3)
). (4.383)
4.12. Teorema de Convolucion
Si aplicamos la transformada de Laplace para resolver ecuaciones diferenciales con valores ini-ciales, probablemente el paso mas difıcil es el ultimo. La dificultad aparece cuando tenemos que

226 CAPITULO 4. TRANSFORMADA DE LAPLACE
descomponer un complicado producto en la suma de dos o mas terminos mas simples, usando frac-ciones parciales. A pesar de que el algebra involucrada es elemental, puede llegar a ser bastantecomplicada.
Serıa factible tener una regla de productos para las transformadas inversas de Laplace, es decir,poder calcularlas a partir de las transformadas inversas de cada uno de sus factores. Esta regla existey de esto nos ocuparemos en esta seccion.
Supongamos que deseamos calcular la transformada inversa de Laplace del producto F (s) y G(s),es decir
L−1[F (s)G(s)], (4.384)
dondeL−1[F (s)] = f(t), L−1[G(s)] = g(t).
De la defincion de la transformada de Laplace, tenemos
F (s) =∫ ∞
0
f(τ)e−sτdτ, G(s) =∫ ∞
0
g(u)e−sudu. (4.385)
Donde estamos tomando a τ y u como las variables de integracion (esto no cambia nada). De talmanera que el producto de F (s) y G(s) lo podemos escribir como
F (s)G(s) =( ∫ ∞
0
f(τ)e−sτdτ)( ∫ ∞
0
g(u)e−sudu). (4.386)
La primer integral no contiene a u, por lo tanto, podemos escribirla dentro de la segunda integral,esto nos da
F (s)G(s) =∫ ∞
0
( ∫ ∞
0
f(τ)e−sτdτ)g(u)e−sudu. (4.387)
Luego, combinando este resultado en una integral doble, resulta
F (s)G(s) =∫ ∞
0
( ∫ ∞
0
f(τ)g(u)e−s(τ+u)dτdu). (4.388)
Haciendo la sustitucion
t = τ + u → τ = t− u,dt
du= 1, 0 < τ <∞ ⇐⇒ u < t <∞. (4.389)
Por lo tanto, tenemos
F (s)G(s) =∫ ∞
0
∫ ∞
u
f(t− u)g(u)e−stdtdu. (4.390)
Ahora, cambiando el orden en la integral doble, resulta
F (s)G(s) =∫ ∞
0
∫ t
0
f(t− u)g(u)e−stdudt. (4.391)
Podemos segregar los terminos que contienen u y escribir
F (s)G(s) =∫ ∞
0
( ∫ t
0
f(t− u)g(u)du)e−stdt. (4.392)
Si hacemos la siguiente definicion
h(t) =∫ t
0
f(t− u)g(u)du, (4.393)

4.12. TEOREMA DE CONVOLUCION 227
entonces
F (s)G(s) =∫ ∞
0
h(t)e−stdt. (4.394)
Esto esF (s)G(s) = L[h(t)] = H(s). (4.395)
Conclusion:
Hemos expresado el producto de F (s) y G(s) como una transformada de Laplace.
Ahora podemos calcular facilmente la transformada inversa del producto de F (s) y G(s), estonos da
L−1[F (s)G(s)] = L−1[H(s)] = h(t) =∫ t
0
f(t− u)g(u)du. (4.396)
Estos resultados los podemos formular en el siguiente
Teorema 4.12.1. (convolucion) sean f(t) y g(t) dos funciones definidas en [0,∞). Entonces, laconvolucion de f(t) y g(t), representada por (f ∗ g)(t) esta definida por
(f ∗ g)(t) =∫ t
0f(τ)g(t− τ)dτ ∀t ≥ 0 (4.397)
Con esta notacion podemos reescribir los resultados anteriores como
L−1[F (s)G(s)] = f ∗ g, (4.398)
que es equivalente aL−1[F (s)G(s)] = L−1[F (s)] ∗ L−1[G(s)]. (4.399)
Esta formula nos dice: La transformada inversa de Laplace de un producto es la convolucion de lastransformadas inversas de Laplace.
Propiedades de la convolucion:
f ∗ g = g ∗ f.
(f ∗ g) ∗ h = f ∗ (g ∗ h).
f ∗ (g1 + g2) = f ∗ g1 + f ∗ g2.
f ∗ 0 = 0 ∗ f = 0.
f ∗ 1 6= 1 ∗ f 6= f .
Teorema 4.12.2. Sean f(t) y g(t) funciones continuas por partes en [0,∞) y de orden exponencial.Entonces, la transformada de Laplace de la convolucion esta dada por la expresion
L[(f ∗ g)(t)] = L[f(t)]L[g(t)] = F (s)G(s) (4.400)

228 CAPITULO 4. TRANSFORMADA DE LAPLACE
4 Tenemos
F (s)G(s) =∫ ∞
0
e−sτf(τ)dτ∫ ∞
0
e−sug(u)du
=∫ ∞
0
∫ ∞
0
e−s(τ+u)f(τ)g(u)dτdu
=∫ ∞
0
f(τ)dτ∫ ∞
0
e−s(τ+u)g(u)du. (4.401)
Hagamos un cambio de variables t = τ + u, donde τ esta fijo. Entonces, u = t − τ y los lımites deintegracion para t son de τ a ∞. Por lo consiguiente, tenemos
F (s)G(s) =∫ ∞
0
f(τ)dτ∫ ∞
τ
e−stg(t− τ)dt. (4.402)
La region de integracion 0 ≤ τ < ∞, τ ≤ t < ∞. Cambiando el orden de integracion obtenemos laregion de integracion como 0 ≤ t <∞, 0 ≤ τ ≤ t. Por consiguiente
F (s)G(s) =∫ ∞
0
e−stdt
∫ t
0
f(τ)g(t− τ)dτ =∫ ∞
0
e−st∫ t
0
f(τ)g(t− τ)dτdt
=∫ ∞
0
[(f ∗ g)(t)
]dt = L[f(t) ∗ g(t)]. 4 (4.403)
Ejemplo 1:
Usar la convolucion para hallar la funcion y(t) si su transformada es
Y (s) =1
(s2 + 1)2. (4.404)
Solucion:
Escribamos la expresion (4.404) de la siguiente manera
Y (s) =1
s2 + 1· 1s2 + 1
. (4.405)
Entonces
y(t) = L−1[Y (s)] = L−1[ 1s2 + 1
]∗ L−1
[ 1s2 + 1
]= sen t ∗ sen t =
=∫ t
0
sen τ sen(t− τ)dτ = −12
∫ t
0
cos tdτ +12
∫ t
0
cos(2τ − t)dτ =
= − t2
cos t+12
sen t. (4.406)
Ejemplo 2:
Usar la convolucion para resolver la ecuacion
y′′ + ay′ + by = f(t), y(0) = y′(0) = 0. (4.407)
donde a y b son ciertas constantes.
Solucion:
Supongamos por un momento que f(t) = δ(t), es decir, que la funcion f(t) es igual a la funciondelta de Dirac. Analicemos el problema de valor inicial
x′′ + ax′ + bx = δ(t), y(0) = y′(0) = 0−, (4.408)

4.12. TEOREMA DE CONVOLUCION 229
donde el superındice ”− ” indica que y′(t) = 0 en t < 0. En la teorıa de circuitos electricos, x(t) sele conoce como la respuesta al impulso.
Aplicamos la transformada de Laplace a la ecuacion (4.408), con el fin de obtener una expresionpara x(t).
L[x′′] + aL[x′] + bL[x] = L[δ(t− t0)]. (4.409)
Obtenemoss2X(s)− sx(0)− x′(0)− asX(s)− sx(0) + bX(s) = 1. (4.410)
Recordemos que la transformada de Laplace de la funcion delta de Dirac es L[δ(t − t0)] = e−st0 ypara el caso en que t0 = 0, tenemos L[δ(t)] = 1.
Al sustituir las condiciones iniciales y despejar X(s), resulta
X(s) =1
s2 + as+ b. (4.411)
Aplicando la transformada de Laplace a la ecuacion (4.407), tomando en cuenta las condicionesiniciales y despejando a Y (s), obtendremos, en analogıa con (4.411), la siguiente expresion
Y (s) =F (s)
s2 + as+ b, (4.412)
donde F (s) = L[f(t)]. Esta misma expresion la podemos escribir como
Y (s) =1
s2 + as+ bF (s). (4.413)
Tomando en cuenta el resultado (4.411), podemos escribir la expresion (4.412), como
Y (s) = X(s)F (s). (4.414)
Luego, tomando la inversa
y(t) = L−1[Y (s)] = L−1[X(s)F (s)] = L−1[X(s)] ∗ L−1[F (s)] = x(t) ∗ f(t). (4.415)
Tenemos que la solucion al problema de valor inicial (4.407), es
y(t) = x(t) ∗ f(t). (4.416)
Es decir, podemos resolver y(t) conociendo solo la funcion f(t) y la solucion x(t) de la ecuaciondiferencial con el mismo lado izquierdo pero con la funcion f(t) = δ(t).
Ejemplo 3:
Con ayuda de la convolusion resolver el problema de valor inicial
y′ + 2y = f(t), y(0) = 0. (4.417)
Solucion:
Sea la ecuacionx′ + 2x = δ(t), y(0) = 0. (4.418)
Aplicando la transformada de Laplace
L[x′] + 2L[x] = L[δ(t)]. (4.419)

230 CAPITULO 4. TRANSFORMADA DE LAPLACE
Tomando en cuenta la condicion inicial, tenemos
sX(s) + 2X(s) = 1. (4.420)
Despejando, resulta
X(s) =1
s+ 2. (4.421)
Luego, aplicando la transformada de Laplace al problema original (4.417), y haciendo un poco dealgebra, tendremos
Y (s) =1
s+ 2F (s). (4.422)
Luego, tomando la inversa y aplicando los resultados de (4.398), resulta
y(t) = L−1[Y (s)] = L−1[ 1s+ 2
]∗ L−1
[F (s)
]. (4.423)
Usando la tabla 4.4-I tenemos, la convolucion
y(t) = e−2t ∗ f(t). (4.424)
Si suponemos que f(t) = t, entonces, debemos calcular la convolucion
y(t) = e−2t ∗ t =∫ t
0
e−2(t−τ)τdτ = e−2t
∫ t
0
e2ττdτ. (4.425)
La integral ∫ t
0
e2ττdτ = e2t( t
2− 1
4
)Sustituyendo en (4.425), obtenemos el resultado final
y(t) =t
2− 1
4(4.426)
Este resultado es la solucion de la ecuacion
y′ + 2y = t, y(0) = 0. (4.427)

4.13. PROBLEMAS DE REPASO PARA EL CAPITULO 4: 231
4.13. Problemas de Repaso parael Capıtulo 4:
4.1.-) Calcular la transformada de Laplacede las siguientes funciones:
1. f(t) = t5.
2. f(t) = (t+ 1)3.
3. f(t) = t2 + 6t− 3.
4. f(t) = t2e3t.
5. f(t) = (et − e−t)2.
6. f(t) = (1 + e2t)2.
7. f(t) = t cos t.
8. f(t) = e−t sen t.
9. f(t) = et cos t.
10. f(t) = sen 2t cos 2t.
11. f(t) = e−t cos2 t.
12. f(t) =
1 0 ≤ t < 4,0 4 ≤ t < 5,1 t > 5.
13. f(t) = 0 0 ≤ t < 1,t2 t > 1.
14. f(t) = 2 0 ≤ t < 3,−2 t > 3.
15. f(t) =t 0 ≤ t < 2,0 t > 2.
16. f(t) = sen t 0 ≤ t < 2π,
0 t > 2π.
17. f(t) =−1 0 ≤ t < 1,
1 t > 1.
18. f(t) =t 0 ≤ t < 1,1 t > 1.
19. f(t) = 2t+ 1 0 ≤ t < 1,
0 t > 1.
20. f(t) =t− 1 0 ≤ t < 2,4 t > 2.
4.2.-) En los siguientes problemas hallarla transformada inversa de Laplace:
1. F (s) = 1s + 2
s2 + 3s3
2. F (s) = 1s + s
s2+4
3. F (s) = (s+1)(s−1)s3
4. F (s) = 2+3s(s2+1)(s+2)(s+1) .
5. F (s) = 3s+2(s−2)(s2+2s+5) .
6. F (s) = 3s+2(s2+4)(s2+9) .
7. F (s) = 3(s−7)4 .
8. F (s) = 2s2+9 .
9. F (s) = 2s−4s2−4s+13 .
10. F (s) = s2−1(s2+1)2 .
11. F (s) = 1s2+4s+20 .
12. F (s) = 2(s−3)2−9 .
13. F (s) = 2s+1s2+9 .
14. F (s) = 3s+4s2−1 .
15. F (s) = e−3s(s+1)s2+2s+2
16. F (s) = s+2s2+2s+2
17. F (s) = ss2+16 + 2
s−3 + s+1s3
18. F (s) = e−s
s2 + e−2s
s2 .
19. F (s) =(
2s + 1
s2
)+ e−2s
(4s2 − 1
s2
)+ e−4s
(1s + 1
s2
).
20. F (s) = 1s + 4
s2 + e−3s(
4s −
1s3
)+ e−2s
s .
4.3.-) Usando la Transformada de Laplaceresolver las siguientes ecuaciones diferen-ciales con valores iniciales.
1. y′ = t, y(0) = 0.
2. y′ = 1− t, y(0) = 0.
3. y′′ + 3y = x2e−x,y(0) = 1, y′(0) = −4.
4. y′′ + y = senx, y(0) = 0,y′(0) = 1.

232 CAPITULO 4. TRANSFORMADA DE LAPLACE
5. y′ = 3− 2t, y(0) = 0.
6. y′′ = 1− t, y(0) = 0, y′(0) = 0.
7. y′′ = 3− 2t, y(0) = 0, y′(0) = 0.
8. y′′ = 3 + 2t, y(0) = 0, y′(0) = 0.
9. y′′ − 6y′ + 5y = 3e2t,y(0) = 2, y′(0) = 3.
10. 2y′′ + 3y′ + y = 8e−2t,y(0) = −4, y′(0) = 2.
11. y′′ + 2y′ + 2y = 1,y(0) = −3, y′(0) = 1.
12. y′′ − 2y′ + y = et,y(0) = 0, y′(0) = 5.
13. y′′ − 8y′ + 20y = tet,y(0) = 0, y′(0) = 0.
14. y′′ − 4y′ + 6y = 30u(t− π),y(0) = 0, y′(0) = 0.
15. y′′ =
t2 0 ≤ t < 1,−t 1 ≤ t < 2,t+ 1 t > t2.
y(0) = 1, y′(0) = 0.
16. y′′ + 2y′ + 2y =
1 0 ≤ t < 2π,t 2π ≤ t < 3π,−1 t > 3π.
y(0) = 2, y′(0) = −1.
17. y′′ + y = 3 0 ≤ t < π,
0 t > π.y(0) = 0, y′(0) = 0.
18. y′′ + y = 3 0 ≤ t < 4,
2t− 5 t > 4.y(0) = 1, y′(0) = 0.
19. y′′ − 2y′ = 4 0 ≤ t < 1,
6 t > 1.y(0) = −6, y′(0) = 1.
20. y′′ − y =e2t 0 ≤ t < 2,1 t > 2.
y(0) = 3, y′(0) = −1.
21. y′′ − 3y′ + 2y =
0 0 ≤ t < 1,1 1 ≤ t < 2,−1 t > 2.
y(0) = −3, y′(0) = 1.
22. y′′ − 5y′ + 4y =
1 0 ≤ t < 1,−1 1 ≤ t < 2,0 t > 2.
y(0) = 3, y′(0) = −5.
23. y′′ + 6y′ + 5y = t− tu(t− 2),y(0) = 1, y′(0) = 0.
24. y′ − 5y =t2 0 ≤ t < 1,0 t > 1.
y(0) = 0, y′(0) = 5.
25. Un circuito conectado en serie contiene uninductor, un resistor y un capacitor, paralos cuales L = 1/2h, R = 10Ω, y C =0,01F , respectivamente. La tensionE(t) =
10 0 ≤ t < 5,0 t > 5.
se aplica al sistema. Determinar la carga in-stantanea q(t) en el capacitor para t > 0 siq(0) = 0 y q′(0) = 0.

Capıtulo 5
INTEGRACION DEECUACIONES DIFERENCIALESUSANDO SERIES DEPOTENCIA
Hemos aprendido diferentes metodos de solucion de las ecuaciones diferenciales. Excepto laecuacion de Cauchy-Euler, siempre hemos supuesto que los coeficientes de la ecuacion diferencialson constantes. Sin embargo, hay ecuaciones diferenciales muy importantes con coeficientes que sonfunciones de la variable independiente, y en tal caso es imposible resolver este tipo de ecuacionescon los metodos antes vistos. No obstante, existe un excelente metodo para resolver ecuaciones dife-renciales con coeficientes variables. Este metodo se basa en las series de potencia. Desde luego, estees un metodo aproximado, pero en tal caso no nos queda mas que conformarnos con ello. Antes deentrar en materia veamos algunas definiciones que seran utiles posteriormente.
5.1. Series de Potencias
Del calculo diferencial e integral sabemos que a una serie infinita que tiene la forma
a0 + a1(x− x0) + a2(x− x0)2+, ...,+am(x− x0)m + ... ≡∑∞
m=0 am(x− x0)m (5.1)
donde x0 y a0, a1, ..., am... son constantes, a estas ultimas se les llama coeficientes de la serie, se lellama serie de potencias en potencias de x− x0. A x0 se le conoce como el centro de la serie y x esuna variable. En particular, el centro x0 puede estar en el orıgen, es decir x0 = 0, y en tal caso, laserie (5.1), se reduce a una serie de potencias en potencias de x
a0 + a1x+ a2x2+, ...,+amx
m + ... ≡∑∞
m=0 amxm (5.2)
233

234CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
La suma de los primeros n terminos de (5.1), se representa por
sn(x) = a0 + a1(x− x0) + a2(x− x0)2+, ...,+an(x− x0)n, (5.3)
donde n = 0, 1, 2 . . . Es claro, que si omitimos los primeros sn terminos de (5.1), la expresion quenos queda es
Rn(x) = an+1(x− x0)n+1 + an+2(x− x0)n+2 + . . . . (5.4)
A esta expresion se le conoce como residuo de la serie (5.1), despues del termino an(x − x0)n.Obviamente∞∑
m=0
am(x− x0)m = a0 + a1(x− x0) + a2(x− x0)2+, ...,+an(x− x0)n + ... = sn(x) +Rn(x). (5.5)
Para las primeras sumas parciales, tenemos
s0(x) = a0, R0(x) = a1(x− x0) + a2(x− x0)2 + . . .
s1(x) = a0 + a1(x− x0), R1(x) = a2(x− x0)2 + a3(x− x0)3 + . . .
s2(x) = a0 + a1(x− x0) + a2(x− x0)2, R2(x) = a3(x− x0)3 + a4(x− x0)4 + . . . (5.6)
De esta manera hemos asociado a la serie (5.1), una sucesion de sumas parciales s0(x), s1(x), s2(x), . . .y sus respectivos residuos R0(x), R1(x), . . ..
Si para alguna x = x1 la suma converge, es decir, si se cumple la relacion
lımn→∞
sn(x1) = s(x1), (5.7)
entonces, decimos que la serie (5.1), converge en x = x1 y que el numero s(x1), es el valor o la sumade la serie (5.1), en x = x1, y se escribe
s(x1) = Σ∞m=0am(x1 − x0)m. (5.8)
Entonces, para cada n se tienes(x1) = Sn(x1) +Rn(x1). (5.9)
Si la suma diverge en x = x1, decimos que la serie (5.1), diverge en x = x1.
Para la convergencia de la serie (5.1), se tiene que para cualquier ε > 0 existe un N(ε) tal que,de (5.9), se tiene
|Rn(x1)| = |s(x1)− sn(x1)| < ε, ∀n > N. (5.10)
Desde el punto de vista geometrico esto significa que toda sn(x1) con n > N , esta entre s− ε y s+ ε,figura 5.1
Figura 5.1: Grafica de la desigualdad (5.10).
Desde el punto de vista practico, esto quiere decir, que en el caso de convergencia es posibleaproximar la suma s(x1) de (5.1), mediante sn(x1), con la presicion que se desee, tomando a n losuficientemente grande.

5.2. INTERVALO Y RADIO DE CONVERGENCIA 235
5.2. Intervalo y Radio de Convergencia
Si ponemos x = x0 en la serie (5.1), observamos que, excepto el termino a0 todos los demasterminos son cero. Por consiguiente, la serie (5.1), siempre converge en x = x0. Existen algunoscasos en los cuales x = x0 puede ser la unica posibilidad de convergencia. Tales series no sonrealmente de interes practico.
Si existen valores de x para los cuales la serie (5.1), converge, estos valores forman un intervalo,llamado intervalo de convergencia de la serie . Si tal intervalo existe y ademas es finito y tiene elpunto medio x0, (este se representa en la figura 5.2)
Figura 5.2: Intervalo de convergencia (5.11) de una serie de potencias con centro en x0.
|x− x0| < R. (5.11)
y la serie (5.1), converge para toda x que satisfaga la relacion (5.11), y diverge para toda x quecumpla la relacion |x− x0| > R, entonces, al numero R se le conoce como radio de convergencia dela serie (5.1).
El radio de convergencia se puede calcular por cualquiera de las dos formulas
lımm→∞
∣∣∣am+1am
∣∣∣ = 1R lımm→∞
m√|am| = 1
R (5.12)
con la unica condicion de que estos lımites existan y que sean diferentes de cero. Si los lımites soninfinitos, entonces, la serie (5.1), converge solo en el centro x0. Si para cada x la serie (5.1), converge,entonces, esta tiene un valor dado s(x). En tal caso, decimos que la serie (5.1), representa a la funcions(x), en el intervalo de convergencia y escribimos
s(x) =∞∑
m=0
am(x− x0)m, |x− x0| < R. (5.13)
El dominio de la funcion sera el intervalo de convergencia de la serie. Si la serie tiene un radio deconvergencia R > 0, entonces s(x), es continua, diferenciable e integrable en el intervalo |x−x0| < R.
5.3. Propiedades de las Series de Potencias
Multiplicacion de series por una constante: Si multiplicamos una serie de potencias por una

236CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
constante, entonces la constante se puede colocar dentro de la sumatoria, es decir
c∑∞
m=0 am(x− x0)m =∑∞
m=0 cam(x− x0)m (5.14)
Suma de Series: Dos series de potencias designadas por las funciones f(x) y g(x)
f(x) =∞∑
m=0
am(x− x0)m, g(x) =∞∑
m=0
bm(x− x0)m, (5.15)
con radios de convergencia positivos pueden sumarse termino a termino en puntos comunes de susintervalos abiertos de convergencia; ası, si la primera serie converge para |x− x0| < R1 y la segundaconverge para |x− x0| < R2, entonces
f(x) + g(x) =∑∞
m=0(am + bm)(x− x0)m (5.16)
para |x− x0| < R, donde R es el menor de R1 y R2. Entonces, las combinaciones lineales de seriesde potencias pueden formarse termino a termino, esto es,
c1f(x) + c2g(x) =∑∞
m=0(c1am + c2bm)(x− x0)m (5.17)
Multiplicacion de Series: Dos series de potencias se pueden multiplicar termino a termino. Sean
f(x) =∞∑
m=0
am(x− xo)m, g(x) =∞∑
m=0
bm(x− xo)m, (5.18)
dos series con radios de convergencia positivos. Entonces, la multiplicacion de estas series esta defini-da como
f(x)g(x) =∞∑
m=0
(a0bm + a1bm−1 + . . .+ amb0)(x− x0)m =
= a0b0 + (a0b1 + a1b0)(x− x0) + (a0b2 + a1b1 + a2b0)(x− x0)2 + . . . (5.19)
Desplazando el ındice en la sumatoria de la serie: El ındice de una sumatoria en una serie depotencias es una variable muda, es decir
∞∑m=2
2mm3
(m+ 1)!=
∞∑k=2
2kk3
(k + 1)!. (5.20)
Para cualquier entero k la serie de potencias
∑∞m=m0
am(x− x0)m−k =∑∞
m+k=m0am+k(x− x0)m+k−k =
∑∞m=m0−k am+k(x− x0)m (5.21)
es decir, reemplazar m por m+ k en el termino general y restar k del lımite inferior de la sumatoriadeja sin cambio a la serie.

5.4. DERIVADAS DE LAS SERIES DE POTENCIAS 237
5.4. Derivadas de las Series de Potencias
Una serie de potencias admite derivadas termino a termino de la serie . Sea la serie
f(x) =∞∑
m=0
am(x− x0)m, |x− x0| < R. (5.22)
convergente para |x−x0| < R, donde R > 0, entonces la serie obtenida al derivar termino a terminotambien converge y representa la derivada f ′(x) de f(x), esto es
f ′(x) =∞∑
m=1
mam(x− x0)m−1, |x− x0| < R (5.23)
De igual manera, tenemos la segunda derivada
f ′′(x) =∞∑
m=2
m(m− 1)am(x− x0)m−2, |x− x0| < R (5.24)
y en general se tiene hasta el orden k,
f (k) =∑∞
m=k m(m− 1)...(m− k + 1)am(x− x0)m−k |x− x0| < R (5.25)
Ademas, todas las series tienen el mismo radio de convergencia R.
5.5. Series e Integracion de Ecuaciones Diferenciales
Existe una infinidad de ecuaciones diferenciales que no se reducen a cuadraturas, en tal caso nosvemos en la necesidad de recurrir a metodos aproximados de integracion de dichas ecuaciones. Unode estos metodos consiste en representar la solucion de la ecuacion en forma de la serie de Taylor,entonces, la suma de un numero finito de terminos de esta serie sera aproximadamente igual a lasolucion particular buscada.
Supongamos que necesitamos hallar la solucion de la ecuacion diferencial de segundo orden
y′′ = F (x, y, y′), y(x0) = y0, y′(x0) = y′0. (5.26)
Ahora, supongamos que la solucion y = f(x) existe y puede ser representada en forma de serie deTaylor, es decir, como
y(x) = f(x) = f(x0) + f ′(x0)(x− x0) +f ′′(x0)1 · 2
(x− x0)2 +f ′′′(x0)1 · 2 · 3
(x− x0)3 + . . . (5.27)
Entonces, debemos encontrar a f(x0), f ′(x0), f ′′(x0), . . . ,, es decir, los valores de las derivadas dela solucion particular para x = x0. Esto es facil calcular usando las expresiones de (5.26). De lascondiciones en (5.26), podemos deducir
f(x0) = y0, f ′(x0) = y′(x0). (5.28)
De la ecuacion (5.26), obtenemos
f ′′(x0) = y′′(x0) = F (x0, y0.y′0). (5.29)

238CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Derivando ambos terminos de la ecuacion (5.26), respecto a x, tenemos
y′′′ = F ′x(x, y, y′) + F ′y(x, y, y′)y′ + F ′y′(x, y, y′)y′′. (5.30)
poniendo los valores de x = x0 en el segundo termino, encontramos
f ′′′(x0) = y′′′(x0). (5.31)
Derivando una vez mas la expresion (5.30), obtenemos
f IV (x0) = yIV (x0). (5.32)
Ası sucesivamente.
Luego los valores encontrados de las derivadas se sustituyen en la serie de Taylor (5.27). La serieası obtenida representa la solucion de la ecuacion dada para los valores de x para los cuales la serieconverge.
Ejemplo 1:
Usar la serie de Taylor para hallar la integracion aproximada de la ecuacion
y′ = x2y + y3, (5.33)
con la condicion inicial y(0) = 1. Aproximar hasta los cuatro primeros terminos diferentes de cero.
Solucion:
De la condicion inicial, tenemos
y′(0) = 02y + (1)3 = 1 → y′(0) = 1. (5.34)
Derivando la ecuacion (5.33) dos veces mas, tenemos
y′′ = 2xy + x2y′ + 3y2y′,
y′′′ = 2y + 2xy′ + 2xy′ + x2y′′ + 6y(y′)2 + 3y2y′′. (5.35)
Sustituyendo en (5.35), la condicion (5.34) y y(0) = 1, obtenemos
y′′ = 3, y′′′ = 2 + 6 + 3 · 3 = 17. (5.36)
Sustituyendo en la serie, tenemos
y(x) = 1 +x
1!+
3x2
2!+
173!x3. (5.37)
Ejemplo 2:
Usar la serie de Taylor para hallar la integracion aproximada de la ecuacion
y′′ = x+ y2. (5.38)
con las condiciones iniciales y(0) = 0 y y′(0) = 1. Hallar los cinco primeros terminos diferentes decero.
Solucion:

5.6. INTEGRACION DE ECUACIONES LINEALES MEDIANTE SERIES DE POTENCIAS239
Diferenciando la ecuacion (5.38), tenemos
y′′′ = 1 + 2yy′,yIV = 2y′y′ + 2yy′′,yV = 2y′′y′ + 2y′y′′ + 2y′y′′ + 2yy′′′ = 6y′y′′ + 2yy′′′,yV I = 6y′′y′′ + 6y′y′′′ + 2y′y′′′ + 2yyIV = 6(y′′)2 + 8y′y′′′ + 2yyIV (5.39)yV II = 12y′′′ + 8y′′y′′′ + 8y′yIV + 2y′yIV + 2yyV .
Sustituyendo las condiciones iniciales, obtenemos
y(0) = 0, y′(0) = 1, y′′ = 0, y′′′(0) = 1, yIV (0) = 2,yV (0) = 0, yV I(0) = 16, yV II(0) = 32. (5.40)
Entonces, la solucion tiene la forma
y(x) =x
1!+x3
3!+
2x4
4!+
16x6
6!+
32x7
7!+ ..... (5.41)
5.6. Integracion de Ecuaciones Lineales Mediante Series dePotencias
Una forma de comprender como funciona el metodo de series de potencias en la solucion deecuaciones diferenciales, es aplicarlo a ecuaciones diferenciales cuyas soluciones ya son conocidas.Empecemos con dos ejemplos, para los cuales las soluciones son obtenidas por metodos ya estudiadosen las secciones anteriores.
Ejemplo 1:
Usar la serie de potencia para resolver la ecuacion diferencial
y′ + y = 0. (5.42)
Solucion:
Supongamos la solucion en serie de potencias
y(x) = a0 + a1x+ a2x2 + a3x
3 + . . . amxm + . . . =
∞∑m=0
amxm. (5.43)
Derivando esta expresion, tenemos
y′(x) =∞∑
m=1
mamxm−1. (5.44)
Sustituyendo en la ecuacion (5.42), obtenemos∞∑
m=1
mamxm−1 +
∞∑m=0
amxm = 0. (5.45)
Para factorizar, debemos tener los mismos exponentes en x. Hagamos un desplazamiento de ındiceen la primer suma de (5.45). Sea n = m− 1, entonces, m = n+ 1 y n comienza de cero. Tenemos
∞∑n=0
(n+ 1)an+1xn +
∞∑n=0
anxn = 0. (5.46)

240CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Factorizamos∞∑
n=0
[(n+ 1)an+1 + an
]xn = 0. (5.47)
Debido a que xn 6= 0, lo que debe ser cero es la expresion que esta en parentesis cuadrados, esto es
(n+ 1)an+1 + an = 0. (5.48)
De aquı obtenemos la ecuacionan+1 = − an
n+ 1, ∀n ≥ 0. (5.49)
A esta ecuacion se le llama ecuacion de recurrencia. Hagamos unas cuantas iteraciones, para ver laforma de la solucion
n = 0 → a1 = −a0.
n = 1 → a2 = −a1
2=a0
2!.
n = 2 → a3 = −a2
3= −a0
3!. (5.50)
n = 3 → a4 = −a3
4=a0
4!.
n = 4 → a5 = −a4
5= −a0
5!.
n = 5 → a6 = −a5
6=a0
6!.
Sustituyendo estos resultados en la solucion (5.43), obtenemos
y(x) = a0 + a1x+ a2x2 + a3x
3 + a4x4 + a5x
5 + a6x6 + . . . =
∞∑m=0
amxm
= a0 − a0x+a0x
2
2!− a0x
3
3!+a0x
4
4!− a0x
5
5!+a0x
6
6!− . . .
= a0
[1− x+
x2
2!− x3
3!+x4
4!− x5
5!+x6
6!− . . .
]. (5.51)
Esta expresion es la solucion en serie de potencias de la ecuacion (5.42). Del calculo, sabemos quela exponencial e−x, la podemos representar como
e−x =∞∑
m=0
(−1)mxm
m!= 1− x+
x2
2!− x3
3!+x4
4!− x5
5!+x6
6!− . . . . (5.52)
Tomando esto en cuenta podemos escribir la expresion (5.51), de la siguiente manera
y(x) = a0e−x, (5.53)
que es la solucion general de la ecuacion (5.42), escrita en funcion de funciones elementales e−x, a0
juega el papel de la constante de integracion .
Ejemplo 2:
Usando el metodo de series de potencias resolver la siguiente ecuacion diferencial
y′′ + y = 0, (5.54)
Solucion:

5.6. INTEGRACION DE ECUACIONES LINEALES MEDIANTE SERIES DE POTENCIAS241
Buscamos la solucion de esta ecuacion en forma de una serie de potencias
y(x) =∞∑
n=0
anxn. (5.55)
Para sustituir en la ecuacion (5.54), debemos derivar dos veces, esto es
y′ =∞∑
n=1
nanxn−1, y′′ =
∞∑n=2
n(n− 1)anxn−2 (5.56)
Sustituyendo este resultado en la ecuacion (5.54), obtenemos
∞∑n=2
n(n− 1)anxn−2 +
∞∑n=0
anxn = 0. (5.57)
Haciendo un corrimiento en el ındice de la primera suma nos queda∞∑
n=0
(n+ 2)(n+ 1)an+2xn +
∞∑n=0
anxn = 0. (5.58)
Ahora podemos factorizar, esto es∞∑
n=0
[(n+ 2)(n+ 1)an+2 + an
]xn = 0. (5.59)
Para que esta expresion sea una identidad debemos tener
(n+ 2)(n+ 1)an+2 + an = 0. (5.60)
Despejando an+2, tenemosan+2 = − an
(n+ 1)(n+ 2). (5.61)
A esta expresion se le conoce como formula de recurrencia . Para cada valor de n obtenemos el valorde los coeficientes de la serie de potencias (5.55). Evaluemos algunos coeficientes:
n = 0 → a2 = − a0
1 · 2= −a0
2!.
n = 2 → a4 = − a2
4 · 3=
a0
4 · 3 · 2!=a0
4!.
n = 2k → a2k =(−1)ka0
(2k)!. (5.62)
De una manera similar, tenemos para los n impares
n = 1 → a3 = − a1
2 · 3= −a1
3!,
n = 3 → a5 = − a3
5 · 4=
a1
5 · 4 · 3!=a1
5!,
n = 2k + 1 → a2k+1 =(−1)ka1
(2k + 1)!. (5.63)
La conclusion a que hemos llegado es que la serie (5.55), sera solucion de la ecuacion diferencial(5.54), siempre y cuando los coeficientes esten dados por
a2k =(−1)ka0
(2k)!, a2k+1 =
(−1)ka1
(2k + 1)!, (5.64)

242CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
donde k = 1, 2, 3, ...,. A los numeros a0 y a1, desde el punto de vista matematico no se les restringeen nada, estos vienen siendo las constantes de integracion, las cuales dependen del valor inicial delproblema. Ası, la solucion en serie de potencias tiene la forma general
y(x) =∞∑
n=0
anxn = a0 + a1 +
∞∑k=1
a2kx2k +
∞∑2k+1
a2k+1x2k+1. (5.65)
Explıcitamente, podemos escribir la solucion como
y(x) = a0
∞∑k=0
(−1)k
(2k)!x2k + a1
∞∑k=0
(−1)k
(2k + 1)!x2k+1. (5.66)
Podemos observar que las series en la ecuacion (5.66), no son, ni mas ni menos que una representacionde las funciones, cosx y senx, en serie de potencias, esto es
cosx =∞∑
k=0
(−1)k
(2k)!x2k, senx =
∞∑k=0
(−1)k
(2k + 1)!x2k+1. (5.67)
De esta manera podemos escribir la solucion (5.66), como
y(x) = a0 cosx+ a1 senx, (5.68)
donde a1 y a2 vienen siendo las constantes de integracion.
Es claro que las ecuaciones diferenciales (5.42), y (5.54), las pudimos haber resuelto con losmetodos del capıtulo anterior, sin embargo, esta es una forma muy clara de ver como funciona elmetodo de series de potencias para el caso de ecuaciones diferenciales con coeficientes constantes.En las siguientes secciones analizaremos ecuaciones diferenciales con coeficientes variables, que esdonde las series de potencias muestran su potencial.
5.7. Soluciones Alrededor de Puntos Ordinarios
Supongamos que tenemos la ecuacion diferencial lineal de segundo orden con coeficientes variables
y′′ + P (x)y′ +Q(x)y = 0 (5.69)
Se dice que un punto x0 es un punto ordinario de la ecuacion (5.69), si P (x) y Q(x) son funcionesanalıticas en x0 (una funcion f(x) es analıtica en el punto x0 si esta puede ser desarrollada en seriede potencias de x − x0, con un radio de convergencia positivo R > 0). A todo punto que no esordinario le llamaremos punto singular de la ecuacion (5.69).
Ejemplo 1:
Analizar los puntos ordinarios o singulares de la ecuacion
xy′′ + (senx)y = 0, (5.70)
Solucion:
La ecuaciontiene (5.70), tiene un punto ordinario en x = 0, ya que, la funcion
Q(x) =senxx
, (5.71)

5.7. SOLUCIONES ALREDEDOR DE PUNTOS ORDINARIOS 243
se puede desarrollar en serie de potencias, esto es
Q(x) = 1− x2
3!+x4
5!− x6
7!+ · · · , (5.72)
la cual converge para todos los valores de x.
Ejemplo 2:
Hallar los puntos ordinarios y singulares de la ecuacion diferencial
y′′ + (lnx)y = 0, (5.73)
Solucion:
La ecuacion (5.73), tiene un punto singular en x = 0 debido a que la funcion
Q(x) = lnx, (5.74)
no se puede desarrollar en serie de potencias en x.
Ejercicio 3:
Sea la ecuacion(x2 − 1)y′′ + 2xy′ + 6y = 0, (5.75)
hallar los puntos ordinarios y singulares si es que existen.
Solucion:
TenemosP (x) =
2xx2 − 1
. (5.76)
Los puntos singulares de la ecuacion (5.75), son aquellos que satisfacen la ecuacion
x2 − 1 = 0. (5.77)
Esto es, x1 = 1 y x2 = −1. Todos los demas valores finitos de x, son puntos ordinarios. La ecuacion(5.75), puede ser desarrollada en serie de potencias para los valores de |x| < 1, es decir, para−1 < x < 1.
Enunciemos el teorema que afirma la existencia de soluciones en series de potencias.
Teorema 5.7.1. Si x = x0 es un punto ordinario de la ecuacion (5.69), entonces, se pueden encon-trar siempre dos soluciones linealmente independientes en forma de series de potencias centradasen, x = x0
y =∑∞
n=0 cn(x− x0)n (5.78)
Una solucion en series converge al menos para |x−x0| < R, donde R es la distancia (el radio) desdex0 al punto singular mas cercano (real o complejo).
Ejemplo 4:
Dada la ecuacion diferencial lineal
y′′ − 2xy′ + y = 0, (5.79)

244CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
encontrar dos soluciones en serie de potencias linealmente independientes alrededor del punto ordi-nario x = x0 = 0.
Solucion:
Supongamos que la solucion esta dada en serie de potencias alrededor de x = 0, entonces, lasolucion tiene la forma
y(x) =∞∑
n=0
anxn. (5.80)
El objetivo es encontrar los coeficientes an. Para esto, derivamos dos veces la solucion (5.80).
y′(x) =∞∑
n=1
nanxn−1, y′′(x) =
∞∑n=2
n(n− 1)anxn−2. (5.81)
Sustituyendo en la ecuacion (5.79), tenemos
∞∑n=2
n(n− 1)anxn−2 − 2
∞∑n=1
nanxn +
∞∑n=0
anxn = 0. (5.82)
Como podemos ver, en el segundo y tercer termino podemos factorizar xn siempre y cuando tomemosuna iteracion. Para poner todos los terminos de las series de tal manera que podamos factorizarlos,hacemos el desplazamiento de ındices en la serie del primer termino. Finalmente, nos queda losiguiente
2a2 + a0 +∞∑
m=1
[(m+ 2)(m+ 1)am+2 − 2mam + am
]xm = 0. (5.83)
Esta relacion se cumple siempre y cuando
2a2 + a0 = 0, (m+ 2)(m+ 1)am+2 = 2mam − am, ∀m ≥ 1. (5.84)
Estas dos condiciones se pueden obtener de la relacion
am+2 =(2m− 1)
(m+ 2)(m+ 1)am, ∀m ≥ 0. (5.85)
Hagamos unas cuantas iteraciones. Para m = 1, de la formula (5.85), tenemos
a3 =a1
6. (5.86)
Para m = 2, tenemos
a4 =312a2 = − 3
12 · 2a0. (5.87)
Para m = 3a5 =
520a3 =
520 · 6
a1 =5
120a1 =
55!a1. (5.88)
Para m = 4, tenemos
a6 =730a4 = − 7
30324a0 =
216!a0. (5.89)
Sustituyendo los coeficientes ai en la solucion (5.80), es decir
y(x) = a0 + a1x+ a2x2 + a3x
3 + a4x4 + ... = (5.90)
= a0
[1− 1
2!x2 − 3
4!x4 − 21
6!x6 − ...
]+ a1
[x+
13!x3 +
55!x5 + ..
].

5.7. SOLUCIONES ALREDEDOR DE PUNTOS ORDINARIOS 245
Las constantes a1 y a2 vienen siendo las constantes de integracion, las cuales dependen de los valoresiniciales del problema.
Ejemplo 5:
Resolver la ecuaciony′′ + (x− 1)2y′ − (x− 1)y = 0. (5.91)
Solucion:
Como podemos ver, el punto x0 = 1, es un punto ordinario de la ecuacion (5.91). Obtengamosuna solucion en serie de potencias de x− 1. Para esto y por comodidad, hagamos que el cero sea unpunto ordinario de la ecuacion (5.91), esto se obtiene haciendo el siguiente cambio de variable
t = x− 1. (5.92)
Entonces, la ecuacion (5.91), se transforma en
y′′ + t2y′ − ty = 0. (5.93)
No olvidemos que ahora las derivadas de la funcion y = y(t) es respecto a la variable independientet. Supongamos que la solucion de la ecuacion (5.93), es la serie de potencias
y(t) =∞∑
n=0
antn. (5.94)
Derivando y sustituyendo en la ecuacion (5.93), tenemos
∞∑n=2
n(n− 1)antn−2 + t2
∞∑n=1
nantn−1 − t
∞∑n=0
antn = 0. (5.95)
Esta misma ecuacion la podemos escribir de la siguiente manera
∞∑n=0
(n+ 2)(n+ 1)an+2tn +
∞∑n=2
(n− 1)an−1tn −
∞∑n=1
an−1tn = 0. (5.96)
Ahora debemos tomar las iteraciones necesarias, para dejar que todas las sumas comiencen conn = 2, y agrupando, nos queda la relacion
2a2 + (3)(2)a3t− a0t+∞∑
n=2
[(n+ 2)(n+ 1)an+2 + (n− 2)an−1
]tn. (5.97)
Se deben cumplir las relaciones
2a2 = 0(3)(2)a3 − a0 = 0 (5.98)
(n+ 2)(n+ 1)an+2 + (n− 2)an−1 = 0, ∀n ≥ 2.
Resolviendo tenemos que
a2 = 0,
an+2 = − (n− 2)(n+ 2)(n+ 1)
an−1, ∀n ≥ 1.

246CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Hagamos unas cuantas iteraciones, para ver la forma de la solucion
n = 1 → a3 =a0
3 · 2.
n = 2 → a4 = 0.
n = 3 → a5 = − 15 · 4
a2 = 0. (5.99)
n = 4 → a6 = − 26 · 5
a3 = −a0
90− 2
6 · 5 · 3 · 2a0.
n = 5 → a7 = 0.n = 6 → a8 = 0.
n = 7 → a9 = − 59 · 8
(− 1
90a0
)=
a0
1296.
Observemos que an = 0 cuando n 6= 3k, donde k = 1, 2, 3.... Debemos recordar que hicimos el cambiode variable t = x− 1, tomando esto en cuenta la solucion general es
y(x) = a1(x− 1) + a0
[1 +
16(x− 1)3 − 1
90(x− 1)6 +
11296
(x− 1)9 − ....]. (5.100)
Ejemplo 6:
Resolver la ecuaciony′′ − xy′ + y = 0. (5.101)
Solucion:
Supongamos la solucion en forma de serie de potencias alrededor de x0 = 0. Esto es
y(x) =∞∑
n=0
anxn. (5.102)
Para sustituir en (5.101), debemos derivar dos veces la expresion (5.102), tenemos
y′(x) =∞∑
n=1
nanxn−1, y′′(x) =
∞∑n=2
n(n− 1)anxn−2 (5.103)
Sustituyendo en (5.101), resulta
∞∑n=2
n(n− 1)anxn−2 − x
∞∑n=1
nanxn−1 +
∞∑n=0
anxn = 0. (5.104)
Esta misma expresion la podemos escribir como
∞∑n=2
n(n− 1)anxn−2 −
∞∑n=1
nanxn +
∞∑n=0
anxn = 0. (5.105)
Luego, la idea es que los exponentes en x deben ser del mismo orden y las sumas deben empezaren el mismo numero m, esto es para poder factorizar. Para el primer termino en (5.105), podemosdesplazar el ındice n como sigue; m = n− 2, n = m+ 2, entonces m empezara de 0. Esto es
∞∑m=0
(m+ 2)(m+ 1)am+2xm −
∞∑m=1
mamxm +
∞∑m=0
amxm = 0. (5.106)

5.7. SOLUCIONES ALREDEDOR DE PUNTOS ORDINARIOS 247
Ahora, para poder factorizar las sumas, debemos hacer que estas empiecen en el mismo valor de m.Para esto desplazamos una unidad la primer y tercer suma
2a2 + a0 +∞∑
m=1
[(m+ 2)(m+ 1)am+2 −mam + am
]xm = 0. (5.107)
Entonces, obtenemos las expresiones
2a2 + a0 = 0,(m+ 2)(m+ 1)am+2 −mam + am = 0, ∀m > 1. (5.108)
De donde obtenemos
am+2 =(m− 1)
(m+ 2)(m+ 1)am, ∀m > 1. (5.109)
Esta ecuacion se conoce con el nombre de formula de recurrencia. Podemos darle valores a m yobtener diferentes valores de am. Obtengamos algunos valores para darnos una idea de como sera laserie
m = 0 → a2 = −a0
2!,
m = 1 → a3 = 0,
m = 2 → a4 =a2
4 · 3= − 1
4!a0,
m = 3 → a5 =2a3
5 · 4= 0,
m = 4 → a6 =3 · a4
6 · 5a4 = − 3
6!a0,
m = 5 → a7 =4
6 · 6= 0,
m = 6 → a8 =5
8 · 7a6 = −5 · 3
8!a0. (5.110)
Entonces, de (5.101), tenemos
y(x) =∞∑
n=0
anxn = a0 + a1x+ a2x
2 + a3x3 + a4x
4 + a5x5 + a6x
6 + a7x7 + a8x
8 + . . . . (5.111)
Sustituyendo en (5.111), los valores obtenidos en (5.110), tenemos
y(x) = a0
(1− x2
2!− x4
4!− 1 · 3
6!x6 − 1 · 3 · 5
8!x8 − . . .
)+ a1x, (5.112)
donde a0 y a1 son constantes arbitrarias. El radio de los terminos sucesivos diferentes de cero de laserie infinita satisface la relacion∣∣∣a2m+2x
2m+2
a2mx2m
∣∣∣ =2m− 1
(2m+ 1)(2m+ 2)|x2| ≈ 1
2m|x2|. (5.113)
El lımite de (5.113), es cero, entonces la serie converge para todo x. Luego la diferenciacion terminoa termino esta justificada, y la solucion formal es valida para −∞ < x <∞.

248CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
5.8. Ecuacion Diferencial de Hermite
Una de las ecuaciones que tienen interes practico es la ecuacion de Hermite. La ecuacion deHermite de orden n tiene la forma
y′′ − 2xy′ + 2ny = 0 (5.114)
donde n es, usualmente, un entero no negativo, n ≥ 0.
Solucion:
Esta ecuacion tiene solucion en serie de potencias alrededor de x0 = 0, es decir, de la forma
y(x) =∞∑
m=0
amxm. (5.115)
Luego, derivando (5.115), obtenemos
y′ =∞∑
m=1
mamxm−1, y′′ =
∞∑m=2
m(m− 1)amxm−2. (5.116)
Poniendo estos resultados en la ecuacion (5.114), se tiene∞∑
m=2
m(m− 1)amxm−2 − 2x
∞∑m=1
mamxm−1 + 2n
∞∑m=0
amxm = 0. (5.117)
Esta misma ecuacion la podemos escribir en su forma equivalente∞∑
m=2
m(m− 1)amxm−2 −
∞∑m=1
2mamxm +
∞∑m=0
2namxm = 0. (5.118)
Para factoriza las sumas y los exponentes de x, hagamos s = m− 2, m = s+ 2 en la primer sumade (5.118), en las otras dos sumas es suficientes cambiar al ındice m por s sin que las sumas sealteren. Entonces, tenemos
∞∑s=0
(s+ 2)(s+ 1)as+2xs −
∞∑s=1
2sasxs +
∞∑s=0
2nasxs = 0. (5.119)
Para poder factorizar xs, debemos hacer que las tres sumas empiecen en un mismo valor, a decir,en s = 1. Para esto desplazamos las otras dos sumas en una unidad
2a2 + 2na0 +∞∑
s=1
[(s+ 2)(s+ 1)as+2 − 2(s− n)as
]xs = 0. (5.120)
Debido a que xs 6= 0, lo que debe ser cero son las expresiones
2a2 + 2na0 = 0, a2 = −na0.
(s+ 2)(s+ 1)as+2 − 2(s− n)as = 0, s = 1, 2, 3, . . . . (5.121)
La primera de las ecuaciones en (5.121), nos da el coeficiente a2 en funcion de a0 y la segundaecuacion es la ecuacion de recurrencia, la cual podemos escribir como
as+2 =2(s− n)
(s+ 2)(s+ 1)as, s = 1, 2, 3, . . . . (5.122)

5.9. POLINOMIOS DE HERMITE 249
Demos algunos valores a s para encontrar algunos coeficientes a
s = 1 → a3 =2(1− n)
3 · 2a1
s = 2 → a4 =2(2− n)
4 · 3a2 = −2(2− n)n
4 · 3a0,
s = 3 → a5 =2(3− n)
5 · 4a3 =
2(3− n)2(1− n)5 · 4 · 3 · 2
a1,
s = 4 → a6 =2(4− n)
6 · 5a4 = −2(4− n)2(2− n)n
6 · 5 · 4 · 3a0 (5.123)
s = 5 → a7 =2(5− n)
7 · 6a5 =
2(5− n)2(3− n)2(1− n)7 · 6 · 5 · 4 · 3 · 2
a1,
s = 6 → a8 =2(6− n)
8 · 7a6 =
2(6− n)2(4− n)2(2− n)n8 · 7 · 6 · 5 · 4 · 3
a0.
Ahora sustituyendo estos resultados en la serie obtenemos
y(x) = a0 + a1x+ a2x2 + a3x
3 + a4x4 + a5x
5 + a6x6 + a7x
7 + a8x8 + . . .
= a0 + a1x− na0x2 +
2(1− n)3 · 2
a1x3 − 2(2− n)n
4 · 3a0x
4
+22(3− n)(1− n)
5!a1x
5 − 22(4− n)(2− n)n6 · 5 · 4 · 3
a0x6 (5.124)
+23(5− n)(3− n)(1− n)
7 · 6 · 5 · 4 · 3 · 2a1x
7 − 23(6− n)(4− n)(2− n)n8 · 7 · 6 · 5 · 4 · 3
a0x8 + . . . .
Finalmente, esta solucion la podemos escribir como
y(x) = a0
[1 +
∞∑k=1
2k(−n)(−n+ 2) . . . (−n+ 2k − 2)(2k)!
x2k (5.125)
+ a1
[x+
∞∑k=1
2k(1− n)(1− n+ 2) . . . (1− n+ 2k − 2)(2k + 1)!
x2k+1].
5.9. Polinomios de Hermite
La ecuacion de Hermite tiene mayor importancia para el caso en que n ≥ 0. Si n es un entero par,entonces el coeficiente de a0 en (5.125), termina, siendo cada termino igual a cero, para k ≥ 1
2 (n+2).Si n es entero impar, entonces, el coeficiente a1 en (5.125), termina, siendo cero cada termino parak ≥ 1
2 (n+ 1). Por consiguiente, la ecuacion de Hermite admite siempre una solucion polinomial degrado n, para n ≥ 0. Una expresion simple para la solucion polinomial la dan los polinomios deHermite . Estos polinomios tienen la forma
Hn =∑n
2k=0
(−1)kn!(2x)n−2k
k!(n−2k)!(5.126)
en donde n2 representa el mayor numero entero ≤ n
2 . Entonces, y = Hn(x) es una solucion de laecuacion de Hermite.

250CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
5.10. Condiciones Suficientes para la Existencia de Solucionesen Serie Potencias.
Hemos probado que una ecuacion con coeficientes constantes, ası como con coeficientes variablesadmiten soluciones en forma de series de potencias en potencias de (x−x0) (5.78). Es logico pregun-tarnos si cualquier ecuacion con coeficientes variables tiene solucion en forma de series de potencias.El siguiente teorema, que no demostraremos, da las condiciones suficientes para la existencia desoluciones en serie de potencias.
Teorema 5.10.1. Sea
y′′ + P (x)y′ +Q(x)y = 0 (5.127)
donde los coeficientes P (x) y Q(x) pueden ser desarrollados en una serie de potencias para |x| < R.Entonces, cada solucion y(x) puede ser expandida en una serie de potencias para |x| < R.
5.11. Ecuacion Diferencial de Legendre
A toda ecuacion de la forma
(1− x2)y′′ − 2xy′ + n(n+ 1)y = 0 (5.128)
se le conoce como ecuacion de Legendre. Esta ecuacion es de gran importancia en la fısica. Apareceen numerosos problemas, en particular, en los que presentan simetrıa esferica (por ejemplo, enelectrostatica).
Solucion:
En la ecuacion (5.128), n es un parametro constante. Dividiendo (5.128), entre 1 − x2, de talmanera que el coeficiente de y′′ sea uno, como en el teorema 5.10.1. Encontramos
P (x) = − 2x1− x2
, Q(x) =n(n+ 1)1− x2
. (5.129)
Debido a que estos coeficientes admiten desarrollo en serie de potencias para |x| < 1, el teoremaanterior afirma que la solucion y(x) tambien admite una expansion en serie de potencias para |x| < 1.Para obtener estas soluciones asumimos
y(x) =∞∑
m=0
amxm. (5.130)
Para sustituir en (5.128), debemos derivar dos veces, esto eso
y′(x) =∞∑
m=1
mamxm−1, y′′(x) =
∞∑m=2
m(m− 1)amxm−2. (5.131)
Al sustituir (5.130), y sus derivadas en (5.131), obtenemos
(1− x2)∞∑
m=2
m(m− 1)amxm−2 − 2x
∞∑m=1
mamxm−1 + n(n+ 1)
∞∑m=0
amxm = 0. (5.132)

5.11. ECUACION DIFERENCIAL DE LEGENDRE 251
Esta misma ecuacion la podemos escribir como
∞∑m=2
m(m− 1)amxm−2 −
∞∑m=2
m(m− 1)amxm −
−2∞∑
m=1
mamxm + n(n+ 1)
∞∑m=0
amxm = 0. (5.133)
Luego, poniendo s = m− 2, m = s+ 2, tenemos
∞∑s=0
(s+ 2)(s+ 1)as+2xs −
∞∑s=2
s(s− 1)asxs − 2
∞∑s=1
sasxs + n(n+ 1)
∞∑s=0
asxs = 0. (5.134)
Para poder factorizar las sumas deben empezar en el mismo valor, para esto desplazamos los ındicesde las sumas, esto es
[2a2 + n(n+ 1)a0]x0 + [6a3 − 2a1 + n(n+ 1)a1]x +
+∑ [
(s+ 2)(s+ 1)as+2 + [−s(s− 1)− 2s+ n(n+ 1)]as
]xs = 0. (5.135)
Debido a que xm 6= 0, entonces los coeficientes que multiplican a las diferentes potencias de x debenser cero, esto da como resultado
2a2 + n(n+ 1)a0 = 0,6a3 − 2a1 + n(n+ 1)a1 = 0,
(s+ 2)(s+ 1)as+2 + [−s(s− 1)− 2s+ n(n+ 1)]as = 0, ∀s > 2. (5.136)
De estas expresiones obtenemos
a2 = −n(n+ 1)2
a0,
a3 =2− n(n+ 1)
6a1 = − (n− 1)(n+ 2)
3!a1. (5.137)
Luego, −s(s− 1)− 2s+ n(n+ 1) = (n− s)(n+ s+ 1), entonces, la ecuacion de recurrencia es
as+2 = − (n− s)(n+ s+ 1)(s+ 2)(s+ 1)
as, (s = 0, 1, 2, ...) (5.138)
Con esta relacion obtenemos cada coeficiente en terminos del segundo que lo precede, con exepcionde a0 y a1, los cuales se dejan como constantes arbitrarias. Es facil obtener algunas relaciones,tomando en cuenta las ya obtenidas en (5.137), tenemos
s = 0 → a2 = −n(n+ 1)2!
a0
s = 1 → a3 = − (n− 1)(n+ 2)3!
a1,
s = 2 → a4 = − (n− 2)(n+ 3)4 · 3
a2 =(n− 2)n(n+ 1)(n+ 3)
4!a0, (5.139)
s = 3 → a5 = − (n− 3)(n+ 4)5 · 4
a3 =(n− 3)(n− 1)(n+ 2)(n+ 4)
5!a1,
y ası sucesivamente. Podemos escribir la expresion (5.130), de la siguiente manera
y(x) = a0 + a2x2 + a4x
4 + . . .+ a1x+ a3x3 + a5x
5 . . . . (5.140)

252CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Sustituyendo (5.139) en (5.140), resulta
y(x) = a0
[1− n(n+ 1)
2!x2 +
(n− 2)n(n+ 1)(n+ 3)4!
x4 −+ . . .]
(5.141)
+ a1
[x− (n− 1)(n+ 2)
3!x3 +
(n− 3)(n− 1)(n+ 2)(n+ 4)5!
x5 −+ . . .]
De esta expresion podemos escribir la solucion general de (5.128), como
y(x) = a0y1(x) + a1y2(x), (5.142)
donde a0 y a1 son constantes arbitrarias y
y1(x) = 1− n(n+ 1)2!
x2 +(n− 2)n(n+ 1)(n+ 3)
4!x4 −+ . . . (5.143)
y2(x) = x− (n− 1)(n+ 2)3!
x3 +(n− 3)(n− 1)(n+ 2)(n+ 4)
5!x5 −+ . . . (5.144)
Estas series convergen para −1 < x < 1. Como podemos observar, las soluciones y1 y y2 sonsoluciones linealmente independientes, ya que una solo contiene potencias pares y la otra solucioncontienen potencias impares y como consecuencia la relacion y1/y2 no es una constante. Debido aque las soluciones son linealmente independientes la expresion (5.142), es la solucion general de laecuacion (5.128), en el intervalo −1 < x < 1.
Si n ≥ 0 es un entero no negativo, entonces y1 o y2 se reducen a un polinomio (y el otro polinomiode las dos soluciones queda como un polinomio multiplicado por ln
(1+x1−x
), como puede demostrarse).
Analicemos lo anterior en casos sencillos.
Sea n = 0, entonces de (5.143), se obtiene y1 = 1 y de (5.144), resulta
y2(x) = x+23!x3 +
(−3)(−1) · 2 · 45!
x5 + . . . =
= x+x3
3+x5
5+ . . . =
12
ln(1 + x
1− x
). (5.145)
Si n = 1, entonces de (5.144), se obtiene y2(x) = x, y de la expresion (5.143), se tiene
y1(x) = 1− x2
1− x4
3− x6
5− . . . =
= 1− x(x+
x3
3+x5
5+ . . .
)= 1− 1
2x ln
(1 + x
1− x
). (5.146)
5.12. Polinomios de Legendre
En varias de las aplicaciones el parametro n de la ecuacion de Legendre es un entero no negativo.Entonces el termino de la derecha de (5.138), es cero cuando s = n y como consecuencia an+2 = 0,an+4 = 0, an+6 = 0, . . .. Por lo tanto, si n es par, y1(x) se reduce a un polinomio de grado n. Sin es impar, y2(x) se reduce a un polinomio de grado n. A estos polinomios multiplicados por unasconstantes, se les conoce como polinomios de Legendre. Estos polinomios son de gran importanciapractica en la ingenierıa y en la ciencia.
Resolviendo para as de (5.138), obtenemos
as = − (s+ 2)(s+ 1)(n− s)(n+ s+ 1)
as+2, (s ≤ n− 2), (5.147)

5.12. POLINOMIOS DE LEGENDRE 253
y entonces todos los coeficientes que no se cancelan pueden expresarse en terminos de los coeficientesan de la mayor potencia de x en el polinomio. El coeficiente an en un principio sigue siendo arbitrario.Por comodidad se elige an = 1 cuando n = 0 y
an =(2n)!
2n(n!)2=
1 · 3 · 5 · · · (2n− 1)n!
, n = 1, 2, 3, · · ·. (5.148)
Esto es debido a que para esta eleccion de an todos esos polinomios tendran el valor de 1 cuandox = 1. Entonces de (5.147) y (5.148), se obtiene
an−2 = − n(n− 1)2(2n− 1)
an = − n(n− 1)(2n)!2(2n− 1)2n(n!)2
=
= − n(n− 1)2n(2n− 1)(2n− 2)!2(2n− 1)2nn(n− 1)!n(n− 1)(n− 2)!
. (5.149)
Esto es
an−2 = − (2n− 1)!2n(n− 1)!(n− 2)!
. (5.150)
De una manera similar, tenemos
an−4 = − (n− 2)(n− 3)4(2n− 3)
an−2 =(2n− 4)!
2n2!(n− 2)!(n− 4)!. (5.151)
En general, cuando n− 2m ≥ 0, se tiene
an−2m = (−1)m (2n− 2m)!2nm!(n−m)!(n− 2m)!
. (5.152)
A la solucion resultante de la ecuacion de Legendre (5.128), se le llama el polinomio de Legendre degrado n y se representa por Pn(x). De (5.152), obtenemos
Pn(x) =M∑
m=0
(−1)m (2n− 2m)!2nm!(n−m)!(n− 2m)!
xn−2m =
=(2n)!
2n(n!)2xn − (2n− 2)!
2n1!(n− 1)!(n− 2)!xn−2 +− · ··, (5.153)
donde M = n/2 o M = (n− 1)/2, cualquiera de los dos que sea un entero. En particular,
P0(x) = 1, P1(x) = x, P2(x) =12(3x2 − 1), P3(x) =
12(5x3 − 3x),
P4(x) =18(35x4 − 30x2 + 3), P5(x) =
18(63x5 − 70x3 + 15x). (5.154)
Los polinomios de Legendre pueden obtenerse haciendo uso de la formula
Pn(x) = 12nn!
dn
dxn [(x2 − 1)n] (5.155)
A esta formula se le conoce como formula de Rodrigues . Usando la formula de Rodrigues calculemoslos tres primeros terminos del polinomio de Legendre
P0(x) =1
20 · 0!= 1, P1(x) =
12 · 1!
d
dx(x2 − 1) =
12(2x) = x. (5.156)

254CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Para el caso de P2(x), se tiene
P2(x) =1
222!d2
dx2
(x2 − 1
)2
=2
222!d
dx
[2(x2 − 1)(2x)
]=
=2
222!
[2x(2x) + 2(x2 − 1)
]=
12(3x2 − 1). (5.157)
Para el caso de P3(x), tenemos
P3(x) =1
23 · 3!d3
dx3(x2 − 1)3. (5.158)
Calculemos primero la tercer derivada de (x2 − 1)3. Esto es
d
dx(x2 − 1)3 = 3(x2 − 1)22x = 6x(x2 − 1)2,
d2
dx2(x2 − 1)3 =
d
dx[6x(x2 − 1)2] = 6(x2 − 1)2 + 24x2(x2 − 1),
d3
dx3(x2 − 1)3 =
d
dx[6(x2 − 1)2 + 24x2(x2 − 1)]
= 24x(x2 − 1) + 48x(x2 − 1) + 48x3 = 120x3 − 72x. (5.159)
Entonces, poniendo este resultado en (5.158)
P3(x) =1
23 · 3!d3
dx3(x2 − 1)3 =
1233!
(120x3 − 72x) =12(5x3 − 3x). (5.160)
Como podemos ver P0(x), P1(x) y P3(x) obtenidos con la formula de Rodrıgues coinciden con losobtenidos en (5.154).
5.13. Series Generalizadas: Metodo de Frobenius
Al igual que el metodo de las series de potencias, el metodo de Frobenius es una herramientapara resolver ecuacion diferenciales lineales con coeficientes variables, sin embargo, este metodo seaplica a ecuaciones mas generales para las que el metodo de series de potencias no es aplicable. Deaquı que el metodo de Frobenius tenga gran importancia practica.
Un punto x = x0 en el que los coeficientes P (x) y Q(x) de la ecuacion
y′′ + P (x)y′ +Q(x)y = 0 (5.161)
son analıticos se llama punto ordinario de la ecuacion. Un punto que no es ordinario se llama puntosingular de la ecuacion. Luego, si x = x0 es un punto ordinario de la ecuacion (5.161), entonces elmetodo de las series de potencias es aplicable y nos da las soluciones en forma de potencias de x−x0,como se vio anteriormente. Sin embargo, si x = x0 es un punto singular el metodo de las series depotencias deja de ser aplicable ya que la ecuacion puede no tener una solucion en serie de potenciasen potencias de x− x0. Afortunadamente, el comportamiento de los coeficientes de una ecuacion enun punto singular a veces no es tan malo como se cree y para tal caso tenemos el siguiente teorema.

5.14. ECUACION INDICIAL 255
Teorema 5.13.1. (metodo de Frobenius) Toda ecuacion diferencial de la forma
y′′ + b(x)x y′ + c(x)
x2 y = 0 (5.162)
donde las funciones b(x) y c(x) son analıticas en x = 0, tiene al menos una solucion que puederepresentarse en la forma
y(x) = xρ∑∞
m=0 amxm =
∑∞m=0 amx
m+ρ = xρ(a0 + a1x+ a2x2 + . . .) a0 6= 0 (5.163)
donde el exponente ρ puede ser un numero cualquiera (real o complejo) y ρ se elige de tal maneraque a0 6= 0.
5.14. Ecuacion Indicial
Para resolver la ecuacion (5.162), la escribimos de la siguiente manera
x2y′′ + xb(x)y′ + c(x)y = 0. (5.164)
Luego, desarrollamos b(x) y c(x) en series de potencias, es decir,
b(x) = b0 + b1x+ b2x2 + . . . , c(x) = c0 + c1x+ c2x
2 + . . . (5.165)
Despues derivamos la expresion (5.163), obtenemos
y′(x) = Σ∞m=0(m+ ρ)amxm+ρ−1 = xρ−1[ρa0 + (ρ+ 1)a1x+ . . .], (5.166)
y′′(x) = Σ∞m=0(m+ ρ)(m+ ρ− 1)amxm+ρ−2 = xρ−2[ρ(ρ− 1)a0 + (ρ+ 1)ρa1x+ . . .]
Sustituyendo estas series en la ecuacion (5.164), obtenemos
xρ[ρ(ρ− 1)a0 + . . .] + (b0 + b1x+ . . .)xρ(ρa0 + . . .)+ (c0 + c1x+ . . .)xρ(a0 + a1x+ . . .) = 0. (5.167)
Luego, se igualan a cero las sumas de los coeficientes de cada potencia de x. De esta manera obten-emos un sistema de ecuaciones que incluyen los coeficientes desconocidos am. Si la menor potenciaes xr, entonces su ecuacion correspondiente sera
[ρ(ρ− 1) + b0ρ+ c0]a0 = 0. (5.168)
Por suposicion a0 6= 0, entonces, la expresion que sera cero es
ρ(ρ− 1) + b0ρ+ c0. (5.169)
Esta ecuacion cuadratica es de gran importancia y se conoce como ecuacion indicial de la ecuaciondiferencial (5.162).
Teorema 5.14.1. (metodo de Frobenious. Base de soluciones) Suponga que la ecuacion diferencial(5.162) cumple los requisitos del teorema (5.13.1) y sean ρ1 y ρ2 las raıces de la ecuacion indicial(5.169). Entonces, se tienen los siguientes tres casos posibles.

256CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Caso I: Raıces distintas que no difieren por un entero. Una base sera
y1(x) = xρ1(a0 + a1x+ a2x2 + . . .) (5.170)
yy2(x) = xρ2(A0 +A1x+A2x
2 + . . .) (5.171)
con coeficientes obtenidos sucesivamente a partir de (5.167) con ρ = ρ1 y ρ = ρ2, respectivamente.
Caso II: Raız doble ρ1 = ρ2 = ρ. En este caso una base sera
y1(x) = xρ(a0 + a1x+ a2x2 + . . .), ρ =
12(1− b0). (5.172)
yy2(x) = y1(x) lnx+ xρ(A1x+A2x
2 + . . .), (x > 0). (5.173)
Caso III: Raıces que difieren por un entero. En este caso la base es
y1(x) = xρ1(a0 + a1x+ a3x2 + . . .). (5.174)
yy2(x) = λy1(x) lnx+ xρ2(A0 +A1x+A2x
2 + . . .) (5.175)
donde las raıces son tales que ρ1 − ρ2 > 0 y λ puede ser cero.
5.15. Ecuacion Diferencial de Bessel
Una de las ecuaciones que se pueden resolver usando el metodo de Frobenius es la impor-tantısima ecuacion llamada ecuacion diferencial de Bessel . Esta ecuacion tuvo sus orıgenes cuandoel matematico F.W Bessel analizaba el movimiento planetario. Las funciones de Bessel , las cualesson soluciones de la ecuacion de Bessel son muy importantes en el estudio de las vibraciones decadenas, propagacion de corrientes electricas en conductores cilındricos, flujo de calor en cilindros,vibracion de membranas circulares y en muchos mas problemas de las matematicas aplicadas.
Toda ecuacion diferencial de la forma
x2y′′ + xy′ + (x2 − ν2)y = 0 (5.176)
donde ν es un parametro constante, se llama ecuacion diferencial de Bessel.
Solucion:
Dividiendo la ecuacion entre x2, tenemos las funciones
P (x) =1x, Q(x) =
x2 − ν2
x2, (5.177)
las cuales tienen un punto singular en x = 0. Escribiendo la ecuacion (5.176), como
y′′ +1xy′ +
(x2 − ν2
x2
)y = 0, (5.178)

5.15. ECUACION DIFERENCIAL DE BESSEL 257
de donde podemos identificar a b(x) = 1 y c(x) = x2 − ν2, las cuales son analıticas en x = 0, y porlo tanto el teorema de Frobenius es aplicable. Entonces, busquemos la solucion de la ecuacion deBessel (5.176), de la forma
y(x) =∞∑
m=0
amxm+ρ,
y′(x) =∞∑
m=0
(m+ ρ)amxm+ρ−1,
y′′(x) =∞∑
m=0
(m+ ρ− 1)(m+ ρ)amxm+ρ−2. (5.179)
Sustituyendo (5.179), en (5.176), obtenemos
x2∞∑
m=0
(m+ ρ− 1)(m+ ρ)amxm+ρ−2 + x
∞∑m=0
(m+ ρ)amxm+ρ−1 +
+x2∞∑
m=0
amxm+ρ − ν2
∞∑m=0
amxm+ρ = 0. (5.180)
Esta misma ecuacion la podemos escribir como
∞∑m=0
(m+ ρ− 1)(m+ ρ)amxm+ρ +
∞∑m=0
(m+ ρ)amxm+ρ +
+∞∑
m=2
am−2xm+ρ − ν2
∞∑m=0
amxm+ρ = 0. (5.181)
Desplazando los primeros dos lugares de las sumas en los terminos primero, segundo y cuarto,obtenemos
[ρ(ρ− 1)a0 + ρa0 − ν2a0]x0+ρ + [ρ(ρ+ 1)a1 + (ρ+ 1)a1 − ν2a1]x1+ρ ++[(m+ ρ− 1)(m+ ρ)am + (m+ ρ)am + am−2 − ν2am]xs+ρ = 0. (5.182)
Igualando a cero los coeficientes de cada potencia de x, obtenemos
ρ(ρ− 1)a0 + ρa0 − ν2a0 = 0, (m = 0).ρ(ρ+ 1)a1 + (ρ+ 1)a1 − ν2a1 = 0, (m = 1). (5.183)
(m+ ρ− 1)(m+ ρ)am + (m+ ρ)am + am−2 − ν2am = 0, (m = 2, 3, . . .).
Debido a que a0 6= 0, de la primer ecuacion en (5.183) se obtiene
ρ(ρ− 1) + ρ− ν2 = 0 → (ρ+ ν)(ρ− ν) = 0. (5.184)
Las raıces son ρ1 = ν y ρ2 = −ν.
Para ρ = ρ1 = ν de la segunda ecuacion de (5.183), se obtiene a1 = 0. La tercera ecuacion sepuede escribir como
(m+ ρ+ ν)(m+ ρ− ν)am + am−2 = 0, (5.185)
y para el caso ρ2 = ν esta expresion toma la forma
(m+ 2ν)mam + am−2 = 0. (5.186)

258CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Puesto que a1 = 0 y ν > 0, se sigue que a3 = 0, a5 = 0, sucesivamente. Si hacemos m = 2s en(5.186), para los demas coeficientes se obtiene
a2s = − 122s(ν + s)
a2s−2, s = 1, 2, . . . , (5.187)
y es posible determinar sucesivamente los coeficientes a2, a4, a6, . . . ,. De esta manera obtenemos
a2 = − a0
22(ν + 1),
a4 = − a2
222(ν + 2)=
a0
242!(ν + 1)(ν + 2). (5.188)
En general, tenemos
a2s =(−1)sa0
22ss!(ν + 1)(ν + 2) · · · (ν + s), s = 1, 2, · · ·. (5.189)
5.16. Funciones de Bessel
Los valores enteros de ν se representan por n. Para ν = n la relacion (5.189), da como resultado
a2s =(−1)sa0
22ss!(n+ 1)(n+ 2) · · · (n+ s), s = 1, 2, · · ·, (5.190)
donde a0 sigue siendo arbitraria. Debido a la arbitrariedad vamos a elegir en lugar de a0 = 1 a
a0 =1
2nn!, (5.191)
Con esta eleccion de (5.190), tenemos
a2s =(−1)s
22s+ns!(n+ s), s = 1, 2, · · ·, (5.192)
Con estos coeficientes y ρ1 = ν = n obtenemos a partir de (5.177) una solucion particular de (5.176),que se representa por Jn(x) y tiene la forma
Jn(x) = xn∑∞
s=0(−1)sx2s
22s+ns!(n+s)!(5.193)
Esta expresion se conoce con el nombre de funcion de Bessel de primera clase y de orden n. Estaserie converge para toda x, y ademas converge con bastante rapidez debido a los factoriales en eldenominador.
Para n = 0, de la ecuacion (5.193), obtenemos la funcion de Bessel de orden cero
J0(x) =∞∑
s=0
(−1)sx2s
22ss!(n+ s)!= 1− x2
22(1!)2+
x4
24(2!)2− x6
26(3!)2+− . . . . (5.194)
Para n = 1, de la ecuacion (5.193), obtenemos la funcion de Bessel de orden uno. Esta tiene la forma
J1(x) =∞∑
s=0
(−1)sx2s+1
22s+1s!(s+ 1)!=x
2− x3
231!2!+
x5
252!3!− x7
273!4!+− . . . , (5.195)

5.16. FUNCIONES DE BESSEL 259
Se puede demostrar que para x grande, se tiene
Jn(x) ≈√
2πx cos
(x− nπ
2 − π4
)(5.196)
Ahora veamos el caso en que ν > 0. Para esto es conveniente usar algunas formulas obtenidas de lafuncion Gamma. Por definicion la funcion Gamma representada por Γ(ν) es
Γ(ν) =∫ ∞
0
e−ttν−1dt. (5.197)
Luego, se cumple la relaciones
Γ(ν + 1) = νΓ(ν), Γ(n+ 1) = n!, (n = 0, 1, 2, . . .). (5.198)
La funcion Gamma generaliza la funcion factorial conocida en el calculo elemental. Ahora podemosescribir la expresion (5.191), como
a0 =1
2νΓ(ν + 1). (5.199)
Entonces la expresion (5.189), toma la forma
a2s =(−1)s
22s+νs!(ν + 1)(ν + 2) · · · (ν + s)Γ(ν + 1). (5.200)
Luego, tomando en cuenta (5.198),
(ν + 1)Γ(ν + 1) = Γ(ν + 2), (ν + 2)Γ(ν + 2) = Γ(ν + 3). (5.201)
Siguiendo estos razonamientos tenemos que en general
(ν + 1)(ν + 2) · · · (ν + s)Γ(ν + 1) = Γ(ν + s+ 1). (5.202)
De tal manera que los coeficientes vienen dados por la expresion
a2s =(−1)s
22s+νs!Γ(ν + s+ 1). (5.203)
Sustituyendo estos coeficientes en la expresion (5.177), se obtiene una solucion particular de laecuacion (5.176), representada por Jν(x) y tiene la forma
Jν(x) = xν∑∞
s=0(−1)sx2s
22s+νs!Γ(ν+s+1)(5.204)
A esta funcion se le conoce con el nombre de funcion de Bessel de primera clase y de orden ν. Laserie (5.204), converge para todo x.
Hasta el momento hemos obtenido una solucion particular Jν(x), de la ecuacion de Bessel. Ahoranos queda por obtener la solucion general de la ecuacion de Bessel. Para esto debemos hallar unasegunda solucion linealmente independiente.
Si ν es un entero, sera facil encontrarla. Si ν es un entero n sera mas difıcil.

260CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Al sustituir ν por −ν en la ecuacion (5.204), obtenemos
J−ν(x) = x−ν∑∞
s=0(−1)sx2s
22s−νs!Γ(s−ν+1)(5.205)
Esto es debido a que la ecuacion de Bessel incluye a ν2, las funciones Jν(x) y J−ν(x), son soluciones dela misma ecuacion para el mismo ν. Si ν no es entero, estas soluciones son linealmente independientes,ya que el primer termino de (5.204), y el primero de (5.205), son multiplos finitos diferentes de cerode xν y x−ν , respectıvamente. Entonces, tenemos
Teorema 5.16.1. Si ν no es un entero, una solucion general de la ecuacion de Bessel para todox 6= 0 es
y(x) = c1Jν(x) + c2J−ν(x) (5.206)
donde Jν(x) y J−ν(x) estan definidas en (5.204), y (5.205), respectıvamente. Sin embargo, si ν esun entero, entonces (5.206), no es una solucion general de la ecuacion de Bessel. En este caso lasdos soluciones de (5.206), seran linealmente dependientes.
Teorema 5.16.2. (Dependencia lineal de las funciones de Bessel) Si ν = n es un entero, entonceslas funciones de Bessel Jn(x) y J−n(x) son linealmente dependientes, debido a que
Jn(x) = (−1)nJn(x) n = 1, 2, · · · (5.207)
Ejemplo 1:
Resolver la siguiente ecuacion diferencial
x2y′′ + xy′ +(4x2 − 1
4
)y = 0. (5.208)
Solucion:
La ecuacion (5.208) es muy parecida a la ecuacion de Bessel (5.176). Para que estas dos ecuacionessean iguales debemos hacer 4x2 = t2 → t = 2x, donde t es una nueva variable independiente.Es decir, en la ecuacion (5.208), debemos hacer la sustitucion
t = 2x,dy
dx=dy
dt
dt
dx= 2
dy
dt,
d2y
dx2=
d
dx
(dydx
)=
d
dx
(2dy
dt
)= 2
d
dt
(dydt
) dtdx
= 4d2y
dt2. (5.209)
Donde hemos aplicado la regla de la cadena. Ahora sustituimos estos resultados en la ecuacion(5.208) y obtenemos la siguiente ecuacion diferencial
t2d2y
dt2+ t
dy
dt+
(t2 − 1
4
)y = 0. (5.210)
Esta ecuacion es una ecuacion de Bessel con ν2 = 1/4 o bien ν = 1/2. Entonces, como ν no es unentero, tenemos por el teorema 5 · 16 · 1 que la solucion general es
y(t) = c1J1/2(t) + c2J−1/2(t). (5.211)

5.17. PROPIEDADES DE LA FUNCION Jν(X) 261
Luego, recordando la sustitucion t = 2x, tenemos la solucion general de la ecuacion (5.208)
y(x) = c1J1/2(2x) + c2J−1/2(2x). (5.212)
Ejemplo 2:
Resolver la ecuacionx2y′′ + xy′ + 4(x4 − 2)y = 0. (5.213)
Solucion:
Si hacemos la sustituciont = x2, (5.214)
y aplicando la regla de la cadena, tenemos
dy
dx=
dy
dt
dt
dx= 2x
dy
dt= 2t1/2 dy
dt,
d2y
dt2=
d
dx
(dydx
)=
d
dt
(2t1/2 dy
dt
) dtdx
=d
dt
(2t1/2 dy
dt
)2t1/2 =
=(t−1/2 dy
dt+ 2t1/2 d
2y
dt2
)2t1/2 = 2
dy
dt+ 4t
d2y
dt2. (5.215)
Sustituyendo en (5.213), obtenemos
t(2dy
dt+ 4t
d2y
dt2
)+ t1/2
(2t1/2 dy
dt
)+ 4(t2 − 2)y = 0. (5.216)
Simplificando, obtenemos la siguiente ecuacion de Bessel
t2d2y
dt2+ t
dy
dt+ (t2 − 2)y = 0, (5.217)
donde ν =√
2. Entonces por el teorema 5 · 16 · 1, tenemos la solucion general de (5.217)
y(t) = c1J√2(t) + c2J−√
2(t). (5.218)
Por consiguiente, la solucion general de la ecuacion (5.213) tiene la forma
y(x) = c1J√2(x2) + c2J−
√2(x
2). (5.219)
5.17. Propiedades de la funcion Jν(x)
Al multiplicar (5.204), por xν se obtiene
xνJν(x) =∞∑
s=0
(−1)sx2s+2ν
22s+νs!Γ(ν + s+ 1). (5.220)
Ahora, derivando esta expresion respecto a x, resulta
d
dx[xνJν(x)] =
∞∑s=0
(−1)s2(s+ ν)x2s+2ν−1
22s+νs!Γ(ν + s+ 1)
= xνxν−1∞∑
s=0
(−1)sx2s
22s+ν−1s!Γ(ν + s). (5.221)

262CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
De la ecuacion (5.204), podemos observar que el segundo termino es xνJν−1(x). Con esto hallamosotra relacion util
ddx [xνJν(x)] = xνJν−1(x) (5.222)
De manera similar, multiplicando (5.204), tomando la derivada y haciendo un cambio de ındice seobtiene
d
dx[x−νJν(x)] =
∞∑s=1
(−1)sx2s−1
22s+ν−1(s− 1)!Γ(ν + s+ 1)=
∞∑m=0
(−1)m+1x2m+1
22m+ν+1m!Γ(ν +m+ 2), (5.223)
donde s = m+1. Usando (5.204), la expresio del segundo termino es −x−νJν−1(x). De esta maneraobtenemos la relacion
ddx [x−νJν(x) = −x−νJν+1(x). (5.224)
Al desarrollar las formulas (5.176), y (5.177), y multiplicar (5.177), por x2ν obtenemos
νxν−1Jν + xν d
dxJν(x) = xνJν−1(x), (5.225)
−νxν−1Jν + xν d
dxJν(x) = −xνJν+1(x). (5.226)
Al restar (5.226), de (5.225), y dividir el resultado entre xν obtenemos la primer relacion de recur-rencia
Jν−1(x) + Jν+1(x) = 2νx Jν(x) (5.227)
Luego, al sumar (5.225), y (5.226), y dividir el resultado entre xν obtenemos la segunda relacion derecurrencia
Jν−1(x)− Jν+1(x) = 2 ddx [Jν(x)] (5.228)
Estas dos ultimas relaciones tienen una importancia practica, sobre todo en el trabajo numerico,donde (5.227), puede usarse para expresar funciones de Bessel de ordenes inferiores, las cuales per-mitan el uso de tablas.
5.18. Funciones de Bessel Fraccionarias, ν = ±12 ,±
32 ,±
52
Analicemos las funciones de Bessel para algunos casos fraccionarios de ν
Para ν = 12 , de la ecuacion (5.204), tenemos
J1/2(x) =√x
∞∑s=0
(−1)sx2s
22s+1/2s!Γ(s+ 32 )
=
√2x
∞∑s=0
(−1)sx2s+1
22s+1s!Γ(s+ 32 ). (5.229)
Recordando la relacionΓ(1
2
)=√π, Γ(ν + 1) = νΓ(ν). (5.230)

5.18. FUNCIONES DE BESSEL FRACCIONARIAS, ν = ± 12 ,±
32 ,±
52 263
Usando estas expresiones, en el denominador se tiene
Γ(s+
32
)=
(s+
12
)(s− 1
2
). . .
32· 12Γ(1
2
)= 2−(s+1)(2s+ 1)(2s− 1) . . . 3 ·
√π. (5.231)
Ademas en el denominador se tiene
22s+1s! = 22s+1s(s− 1) . . . 2 · 1 = 22s+12s(2s− 2) . . . 4 · 2. (5.232)
El denominador queda como (2s+ 1)!√π, de donde
J1/2(x) =
√2πx
∞∑s=0
(−1)sx2s+1
(2s+ 1)!. (5.233)
Esta no es ni mas ni menos que la serie de Maclaurin de sinx. Por consecuencia
J1/2(x) =
√2πx
senx. (5.234)
Ahora derivemos (5.234), obtenemos
d
dx[√xJ1/2(x)] = x1/2J−1/2(x) =
√2π
cosx, (5.235)
de donde obtenemos el resultado
J−1/2(x) =
√2πx
cosx. (5.236)
Demostrar que las siguientes relaciones son validas:
J3/2(x) =1xJ1/2(x)− J−1/2(x) =
√2πx
( senxx
− cosx)
(5.237)
J−3/2(x) = − 1xJ−1/2(x)− J1/2(x) = −
√2πx
(cosxx
+ senx). (5.238)
Ejemplo 1:
Resolver la ecuacionx2y′′ + xy′ +
(x2 − 1
4
)y = 0. (5.239)
Solucion:
La ecuacion (5.239) es una ecuacion de Bessel con ν = 1/2. Entonces, la solucion general esta dadapor la funcion
y(x) = c1J1/2(x) + c2J−1/2(x). (5.240)
Luego, tomando en cuenta los resultados obtenidos en (5.234) y (5.236), la solucion (5.240) lapodemos escribir de la siguiente manera
y(x) =
√2πx
(c1 senx+ c2 cosx
). (5.241)
Ejemplo 2:
Resolver la ecuacionx2y′′ + xy′ +
(x2 − 9
4
)y = 0. (5.242)

264CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
Solucion:
La ecuacion (5.242) es una ecuacion de Bessel con ν = 3/2. Entonces, la solucion general es
y(x) = c1J3/2(x) + c2J−3/2(x). (5.243)
Tomando en cuenta las expresiones (5.237) y (5.238), podemos escribir la solucion general (5.243)de la siguiente manera
y(x) =
√2πx
[c1
( senxx
− cosx)
+ c2
(cosxx
+ senx)]. (5.244)
5.19. Funciones de Bessel de segunda clase
Nos queda por obtener una solucion general de la ecuacion de Bessel para el caso ν = n entero.Recordemos que para ν no entero hemos obtenido una base Jν(x) y J−ν(x), y que en el caso ν = nlas dos soluciones obtenidas se vuelven linealmente dependientes, de tal manera que para este caso senecesita una segunda solucion linealmente independiente. Esta ecuacion se reperesentara por Yn(x).
Consideremos primero el caso n = 0. Entonces, la ecuacion de Bessel se reduce a la ecuacion
xy′′ + y′ + xy = 0. (5.245)
Para esta ecuacion se obtiene la ecuacion indicial con raız de multiplicidad 2. Al principio tenemossolo la solucion J0(x). Luego, la segunda solucion tendra la forma
y2(x) = J0(x) lnx+∞∑
m=1
Amxm. (5.246)
Sustituyendo y2 y sus derivadas
y′2 = J ′0(x) lnx+J0(x)x
+∞∑
m=1
mAmxm−1,
y′′2 = J ′′0 (x) lnx+2J ′0x− J0(x)
x2+
∞∑m=1
m(m− 1)Amxm−2. (5.247)
en la ecuacion original. Los terminos logarıtmicos se cancelan, ya que J0(x) es una solucion de laecuacion, al igual los otros terminos que contienen a J0(x), de esta manera obtenemos
2J ′0 +∞∑
m=1
m(m− 1)Amxm−1 +
∞∑m=1
mAmxm−1 +
∞∑m=1
Amxm+1 = 0. (5.248)
De aquı se obtiene la serie de potencias de J ′0 en la forma
J ′0(x) =∞∑
m=1
(−1)m2mx2m−1
22m(m!)2=
∞∑m=1
(−1)mx2m−1
22m−1m!(m− 1)!(5.249)
Al poner esta serie resulta
∞∑m=1
(−1)mx2m−1
22m−2m!(m− 1)!+
∞∑m=1
m2Amxm−1 +
∞∑m=1
Amxm+1 = 0. (5.250)

5.19. FUNCIONES DE BESSEL DE SEGUNDA CLASE 265
Podemos demostrar que todas las Am con subındices impares son cero. El coeficiente de la potenciax0 es A1 y en consecuencia A1 = 0. Al igualar a cero la suma de los coeficientes de la potencia x2s
se tiene(2s+ 1)2A2s+1 +A2s−1 = 0, s = 1, 2, . . . (5.251)
Puesto que A1 = 0, obtenemos A3, A5, ...,= 0. Luego, igualando a cero la suma de los coeficientesde x2s+1 se obtiene
−1 + 4A2 = 0 → A2 =14, s = 0. (5.252)
y para los demas valores s = 1, 2, . . . , tenemos
(−1)s+1
22s(s+ 1)!s!+ (2s+ 2)2A2s+2 +A2s = 0. (5.253)
Para s = 1 se obtiene18
+ 16A4 +A2 = 0 → A4 = − 3128
. (5.254)
En general
A2m =(−1)m−1
22m(m!)2(1 +
12
+13
+ . . .+1m
), m = 1, 2, . . . . (5.255)
Introduciendo la notacion
hm = 1 +12
+13
+ . . .+1m
(5.256)
y poniendo en y A1, A3 = A5 = . . . = 0, obtenemos el siguientes resultado
y2(x) = J0(x) lnx+∞∑
m=1
(−1)m−1hm
22m(m!)2x2m =
= J0(x) lnx+14x2 − 3
128x4 +− . . . . (5.257)
Ya que J0(x) y y2(x) son funciones linealmente independientes, estas forman una base de solucionesde la ecuacion de Hermite para n = 0. Existe otra base, en este caso se sustituye y2 por una solucionparticular independiente de la forma a(y2 + bJ0) donde (a 6= 0) y b son constantes. Es frecuente, quese tomen los valores a = 2/π y b = γ − ln 2, donde γ = 0,577215664... es la constante de Euler. Estaconstante se define como el lımite de
1 +12
+13
+ . . .+1s− ln s. (5.258)
cuando s→∞. La solucion particular estandar obtenida de esta manera se le conoce como funcionde Bessel de segunda clase y de orden cero o tambien como funcion de Neumann de orden cero y serepresenta por Y0(x) y tiene la forma
Y0(x) = 2π
[J0(x)
(ln x
2 + γ)
+∑∞
m=1(−1)m−1hm
22m(m!)2 x2m]. (5.259)
Para x > 0 pequena la funcion Y0(x) tiene un comportamiento similar al de lnx y Y0(x) → −∞cuando x→ 0.

266CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA
5.20. Funciones de Bessel de Segunda Clase Yn(x)
Para el caso en que ν = n = 1, 2, 3, . . . se puede obtener una segunda solucion haciendo manip-ulaciones similares a las hechas en el caso n = 0. En estos casos la solucion tambien involucra untermino logarıtmico. Esto no es del todo satisfactorio, ya que la segunda solucion se define de maneradiferente, dependiendo de si el orden de ν es entero o no. Por lo anterior, es conveniente tomar unasegunda solucion que sea valida para todos los valores de ν. Esta segunda solucion representada porYν(x) y definida para toda ν tiene forma
Yν(x) =1
senπν
[Jν(x) cosπν − Jν(x)
],
Yn(x) = lımν→n
Yν(x). (5.260)
Esta funcion recibe el nombre de funcion de Bessel de segunda clase de orden ν o funcion de Neumannde orden ν
Para un orden ν no entero la funcion Yν(x) es evidentemente una solucion de la ecuacion deBessel, ya que Jν(x) y J−ν(x) son soluciones de la ecuacion. Debido a que para esos valores de νlas soluciones Jν(x) y J−ν(x) son linealmente independientes y Yν(x) incluye a Jν(x), las funcionesJν(x) y Yν(x) son linealmente independientes. Ademas, se puede demostrar que el lımite en (5.260)existe y que Yn(x) es una solucion de la ecuacion de Bessel para un orden entero. El desarrollode la funcion Yn(x) contiene un termino logarıtmico. Por lo tanto, Jn(x) y Yn(x) son solucioneslinealmente independientes de la ecuacion de Bessel. Poniendo los valores de las funciones Jν(x) yJ−ν(x) en (5.260), y haciendo ν → n, obtenemos
Yn(x) =2πJn(x)
(ln
(x2
)+ γ
)+xn
π
∞∑m=0
(−1)m−1(hm + hm+n)22m+nm!(m+ n)!
x2m
− x−n
π
n−1∑m=0
(n−m− 1)!22m−nm!
x2m, (5.261)
donde x > 0, n = 0, 1, 2, ... y
h0 = 0, hs = 1 +12
+13
+ . . .+1s, (s = 1, 2, 3, . . .) (5.262)
y cuando n = 0 la ultima suma en (5.261) debe sustituirse por cero. Para n = 0 la expresion (5.261)se reduce a (5.259). Ademas, se puede demostrar que
Y−n(x) = (−1)nYn(x). (5.263)
Finalmente, estos resultados los formularemos en el siguiente teorema
Teorema 5.20.1. Una solucion general de la ecuacion de Bessel para todos los valores de ν es
y(x) = c1Jν(x) + c2Yν(x).
Hay ocasiones practicas en las que existe la necesidad de contar con soluciones complejas de laecuacion de Bessel para valores reales de x. En tal caso, con frecuencia se usan las soluciones
H(1)ν (x) = Jν(x) + iYν(x),
H(2)ν (x) = Jν(x)− iYν(x) (5.264)
Estas funciones son linealmente independientes y se llaman funciones de Bessel de tercera clase yde orden ν, o primera y segunda funciones de Hankel de orden ν.

5.21. PROBLEMAS DE REPASO DEL CAPITULO 5 267
5.21. Problemas de Repaso delCapıtulo 5
5.1.- Usando la serie de Taylor obtenerla integracion aproximada de las siguientesecuaciones.
1. y′ = x2y+ y3, y(0) = 1. Hallar los cuatroprimeros terminos del desarrollo diferentesde cero.
2. y′ = x + 2y2, y(0) = 0. Hallar los dosprimeros terminos del desarrollo diferentesde cero.
3. y′ = y2 + x, y(0) = 1. Hallar los cincoprimeros terminos del desarrollo.
4. y′′ = (2x− 1)y− 1, y(0) = 0, y′(0) = 1.Hallar los primeros cinco terminos.
5. y′ = x2 + y2, y(0) = 1. Hallar los cincoprimeros terminos.
5.2.- Hallar Soluciones en Serie de Po-tencias Alrededor de un Punto Ordinariox = 0.
1. y′′ + xy′ + y = 0.
2. y′′ − xy = 0.
3. y′′ − 2xy′ + y = 0.
4. y′′ + x2y′ + xy = 0.
5. y′′ + x2y = 0.
6. y′′ + 2xy′ + 2y = 0.
7. (x− 1)y′′ + y′ = 0.
8. (x2 + 2)y′′ + 3xy′ − y = 0.
9. y′′ − xy = 0.
10. y′′ − 2xy′ + y = 0.
5.3.- Resolver las siguientes ecuacionesde Bessel
1. y′′ + 1xy
′ +(1− 1
9x2
)y = 0.
2. 4x2y′′ + 4xy′ + (100x2 − 9)y = 0.
3. x2y′′ + xy′ +(4x4 − 16
9
)y = 0.
4. x2y′′ + xy′ + (x2 − 4)y = 0.
5. xy′′ + y′ + 14y = 0.

268CAPITULO 5. INTEGRACION DE ECUACIONES DIFERENCIALESUSANDO SERIES DE POTENCIA

Capıtulo 6
SISTEMAS DE ECUACIONESDIFERENCIALES
Hemos aprendido diferentes metodos para resolver ecuaciones diferenciales ordinarias consi-derandolas individualmente. Sin embargo, en la practica, es muy probable que se necesite mas deuna ecuacion diferencial para modelar un proceso dado.
En este ultimo capıtulo analizaremos situaciones, en las cuales, dos o mas funciones desconocidasestan relacionadas mediante un conjunto de ecuaciones diferenciales.
6.1. Sistemas de Ecuaciones Diferenciales Ordinarias
En general, un sistema de ecuaciones diferenciales ordinarias
dy1dt
= f1(t, y1, y2, ..., yn),
dy2dt
= f2(t, y1, y2, ..., yn),
... (6.1)dyn
dt= fn(t, y1, y2, ..., yn), (6.2)
donde, y1, y2, ..., yn son funciones desconocidas de la variable t, se llama sistema normal. Si la partederecha del sistema normal de ecuaciones diferenciales son funciones lineales respecto a la variabley1, y2, ..., yn, entonces, el sistema de ecuaciones diferenciales se llama sistema lineal . Un sistema deecuaciones diferenciales de primer orden es lineal, si tiene la forma
dy1dt
= a11(t)y1(t) + a12(t)y2(t) + . . .+ a1n(t)yn(t) + f1(t),
dy2dt
= a21(t)y1(t) + a22(t)y2(t) + . . .+ a2n(t)yn(t) + f2(t),
... (6.3)dyn
dt= an1(t)y1(t) + an2(t)y2(t) + . . .+ ann(t)yn(t) + fn(t). (6.4)
269

270 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Recordando el algebra de matrices, tenemos que el sistema (6.4), lo podemos escribir como
d
dt
y1y2...yn
=
a11(t) a12(t) . . . a1n(t)a21(t) a22(t) . . . a2n(t)
......
. . ....
an1(t) a2n(t) . . . ann(t)
y1y2...yn
+
f1(t)f2(t)
...fn(t)
. (6.5)
La forma matricial (6.5), la podemos escribir de una forma aun mas compacta, usando la formavectorial, es decir
dY(t)dt = A(t)Y(t) + F(t) (6.6)
donde hemos hecho las siguientes definiciones
Y(t) =
y1(t)y2(t)
...yn(t)
A(t) =
a11(t) a12(t) . . . a1n(t)a21(t) a22(t) . . . a2n(t)
......
. . ....
an1(t) a2n(t) . . . ann(t)
, F(t) =
f1(t)f2(t)
...fn(t)
. (6.7)
A la matriz A(t) se le conoce como matriz de coeficientes , y a F(t) como la funcion de excitaciono fuente. Se supone que A(t) y F(t) son continuas si sus elementos son continuos en algun intervalo(a, b). Si la funcion de excitacion F(t) = 0, entonces, decimos que el sistema (6.6), es un sistemahomogeneo. El sistema dado por (6.6), es un sistema no homogeneo ya que F(t) 6= 0.
Un vector solucion en un intervalo I ∈ (a, b) es cualquier matriz columna
Y(t) =
y1(t)y2(t)
...yn(t)
, (6.8)
cuyos elementos son funciones diferenciables y satisfacen el sistema de ecuaciones (6.5), o (6.6), enel intervalo dado. Supongamos que t0 es un punto en el intervalo I ∈ (a, b), y sean
Y(t0) =
y1(t0)y2(t0)
...yn(t0)
, Y0 =
c1c2...cn
, (6.9)
donde, ci, (i = 1, 2, ..., n) son constantes dadas. Entonces, el problema
Resolver :dYdt
= A(t)Y + F(t)
Sujeto a : Y(t0) = Y0, (6.10)
es un problema de valor inicial en el intervalo dado.
Ahora, podemos hacernos la siguiente pregunta: Cuales seran las condiciones suficientes para queel problema de valor inicial (6.10), tenga solucion? La respuesta la da el siguiente teorema.
Teorema 6.1.1. Sean las componentes aij y las fi del sistema (6.7), funciones continuas de t enun intervalo abierto a < t < b que contiene al punto t = t0. Entonces, (6.7), tiene una solucion y(t)en este intervalo que satisface las condiciones iniciales (6.10). Esta solucion, ademas, es unica.

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 271
Estudiaremos cuatro de los metodos mas comunes en la solucion de los sistemas de ecuacionesdiferenciales lineales con coeficientes constantes de la forma (6.10).
I Reduccion de un Sistema de Ecuaciones a una Ecuacion de Orden n
En ocasiones, un sistema de ecuaciones diferenciales (6.4), se puede transformar a una ecuaciondiferencial de orden n, la cual contiene una funcion desconocida. Esto se puede realizar diferenciandouna de las ecuaciones del sistema y eliminando todas las otras desconocidas. Este metodo se conocecomo metodo de eliminacion .
Sin perder generalidad, vamos analizar este metodo para el caso de un sistema de dos ecuacionesdiferenciales. Sea el sistema
dx
dt= ax+ by + f(t)
dy
dt= cx+ dy + g(t), (6.11)
donde a, b, c y d son ciertas constantes, f(t), g(t) son funciones dadas, y x(t), y(t) son las funcionesdesconocidas. De la primer ecuacion de (6.11), despejando a y(t), tenemos
y(t) =1b
(dxdt− ax− f(t)
). (6.12)
Derivando esta funcion respecto a t, obtenemos
dy
dt=
1b
(d2x
dt2− a
dx
dt− df
dt
). (6.13)
Sustituyendo las expresiones (6.12), y (6.13), en la segunda ecuacion del sistema (6.11), resulta
d2x
dt2− (a+ d)
dx
dt− (bc− da)x =
df
dt− f(t)d+ bg(t). (6.14)
Esta misma expresion la podemos escribir, de una manera mas general, como
Ad2x
dt2+B
dx
dt+ Cx = P (t). (6.15)
Al resolver esta ecuacion tendremos una solucion de la forma
x(t) = x(t, c1, c2). (6.16)
Luego, derivando la expresion obtenida respecto a t y sustituyendo en la ecuacion (6.12), hallamosy(t). De esta manera obtenemos las soluciones x(t) y y(t) del sistema de ecuaciones (6.11).
Ejemplo 1:
Resolver el siguiente sistema de ecuaciones diferenciales
dx
dt= 2y,
dy
dt= x. (6.17)
Solucion:

272 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Una forma para resolver este sistema es, darnos cuenta que derivando la primera ecuacion dela expresion (6.17), respecto al tiempo t (no necesariamente t es el tiempo), y despues tomando encuenta la segunda ecuacion obtenemos una ecuacion lineal de segundo orden, esto es
d2x
dt2= 2
dy
dt. (6.18)
Luego, sustituyendo en (6.18), el valor dy/dt = x, de la segunda ecuacion de (6.17), obtenemos
d2x
dt2= 2x. (6.19)
La ecuacion (6.19), la podemos escribir como
d2x
dt2− 2x = 0. (6.20)
Esta ecuacion es una ecuacion diferencial lineal homogenea de segundo orden con coeficientes cons-tantes. Suponiendo una solucion de la forma x(t) = emt, entonces, tenemos que la correspondienteecuacion caracterıstica y sus raıces estan dadas por
m2 − 2 = 0 → m = ±√
2. (6.21)
Entonces, la solucion general de la ecuacion (6.20), esta dada por
x(t) = c1e√
2t + c2e−√
2t. (6.22)
De la primera ecuacion de (6.17), tenemos y(t) = 12
dxdt . Entonces, derivando la expresion (6.22),
respecto a t, tenemos
y(t) =12dx
dt=c1√
22
e√
2t − c2√
22
e−√
2t. (6.23)
De tal manera que la solucion general del sistema (6.17), es
x(t) = c1e√
2t + c2e−√
2t
y(t) = c1e√
2t − c2e−√
2t. (6.24)
donde c1 = c1√
22 , c2 = c2
√2
2 . El sistema de ecuaciones (6.17), tambien puede ser resuelto de lasiguiente manera; usando la regla de la cadena, tenemos
dy
dx=dy
dt
dt
dx=
x
2y. (6.25)
Esta ecuacion es una ecuacion de primer orden y de variables separables, la cual se puede resolverfacilmente. Como resultado tenemos,
2y2 − x2 = c. (6.26)
En principio, las dos soluciones obtenidas (6.24), y (6.26), son las mismas, nadamas que la primeraesta en forma parametrica y la segunda no (podra demostrarlo?).
Ejemplo 2:
Resolver el sistema de ecuaciones diferenciales
dx
dt= x cos t,
dy
dt= xe− sen t. (6.27)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 273
Solucion:
Analizando el sistema nos damos cuenta que la primera ecuacion no depende de y y, por lo tanto,la podemos integrar separando las variables, esto es∫
dx
x=
∫cos tdt → ln
( xc1
)= sen t → x(t) = c1e
sen t. (6.28)
Sustituyendo el valor de x(t), en la segunda ecuacion del sistema (6.27), tenemos
dy
dt= c1e
sen te− sen t = c1 → dy
dt= c1. (6.29)
Esta ultima ecuacion se integra facilmente, la solucion es
y(t) = c1t+ c2, (6.30)
donde c1 y c2 son constantes de integracion. Por consiguiente, la solucion general del sistema deecuaciones (6.27), tiene la forma
x(t) = c1esen t,
y(t) = c1t+ c2. (6.31)
Ejemplo 3:
Resolver el sistema de ecuaciones
dx
dt= ax+ y,
dy
dt= −x+ ay. (6.32)
Solucion:
Derivando la primera ecuacion del sistema (6.32), tenemos
d2x
dt2= a
dx
dt+dy
dt. (6.33)
Luego, sustituyendo la segunda ecuacion de (6.32), en (6.33), obtenemos
dy
dt= a
dx
dt− x+ ay. (6.34)
De la primera ecuacion de (6.32), despejamos a y, esto es
y = −ax+dx
dt, (6.35)
y la sustituimos en (6.34), obtenemos la ecuacion diferencial
d2x
dt2− 2a
dx
dt+ (a2 + 1)x = 0. (6.36)
Ahora, nos queda por resolver esta ecuacion que es de segundo orden con coeficientes constantes.Suponemos la solucion x(t) = emt, entonces, la ecuacion caracterıstica tiene la forma
m2 − 2am+ (a2 + 1) = 0. (6.37)

274 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Las raıces de esta ecuacion sonm1,2 = a± i. (6.38)
La solucion general tiene la forma
x(t) = eat(c1 cos t+ c2 sen t
). (6.39)
Luego, sustituyendo esta expresion en (6.35), tenemos
y(t) =dx
dt− ax = aeat
(c1 cos t+ c2 sen t
)+ eat
(− c1 sen t+ c2 cos t
)− aeat
(c1 cos t+ c2 sen t
)= eat
(− c1 sen t+ c2 cos t
). (6.40)
Entonces, las soluciones del sistema estan dadas por las expresiones
x(t) = eat(c1 cos t+ c2 sen t
),
y(t) = eat(− c1 sen t+ c2 cos t
). (6.41)
Ejemplo 4:
Resolver el siguiente sistema de ecuaciones
dx
dt= e3t − y,
dy
dt= 2e3t − x. (6.42)
Solucion:
Diferenciando, respecto a t, la primera ecuacion del sistema, obtenemos
d2x
dt2= 3e3t − dy
dt. (6.43)
Sustituyendo en (6.43), la segunda ecuacion del sistema (6.42), resulta la ecuacion
d2x
dt2= 3e3t − 2e3t + x = e3t + x → d2x
dt2− x = e3t. (6.44)
Esta ultima ecuacion es una ecuacion lineal no homogenea de segundo orden. La ecuacion homogeneacorrespondiente a (6.44), es
d2x
dt2− x = 0. (6.45)
Supongamos la solucion x(t) = emt, sustituyendo en (6.45), obtenemos la ecuacion caracterıstica ysus raıces
m2 − 1 = 0 → m = ±1. (6.46)
Por consiguiente, la solucion general de la ecuacion (6.45), esta dada por
xh(t) = c1et + c2e
−t. (6.47)
Luego, suponemos una solucion particular xp de la ecuacion (6.44). Sea la solucion particular
xp = Ae3t. (6.48)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 275
Sustituyendo en la ecuacion (6.44), resulta
9Ae3t −Ae3t = e3t → A =18. (6.49)
Entonces, la solucion particular es
xp(t) =18e3t. (6.50)
Luego, la solucion general de la ecuacion (6.44), es
x(t) = c1et + c2e
−t +18e3t. (6.51)
De la segunda ecuacion del sistema (6.42), podemos despejar a y, esto nos da
y(t) = e3t − dx
dt. (6.52)
Ahora, derivamos respecto a t la solucion (6.51), y la sustituimos en (6.52), obtenemos
y(t) = e3t −(c1e
t − c2e−t +
38e3t
)= −c1et + c2e
−t +58e3t. (6.53)
Finalmente, la solucion general del sistema (6.42), esta dado por las expresiones
x(t) = c1et + c2e
−t +18e3t,
y(t) = −c1et + c2e−t +
58e3t. (6.54)
Ejemplo 5:
Resolver el sistema de ecuaciones
dx
dt= 2y,
dy
dt= 2z,
dz
dt= 2x. (6.55)
Solucion:
Diferenciando, respecto a t, la primera ecuacion de (6.55), obtenemos
d2x
dt2= 2
dy
dt. (6.56)
Luego, sustituyendo la segunda ecuacion de (6.55), en (6.56), se tiene
d2x
dt2= 4z. (6.57)
Derivando esta ecuacion respecto a t, resulta
d3x
dt3= 4
dz
dt. (6.58)

276 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Sustituyendo la tercera ecuacion de (6.55), en (6.58), obtenemos la ecuacion homogenea de tercerorden
d3x
dt3= 8x → d3x
dt3− 8x = 0. (6.59)
La solucion general de esta ecuacion es
x(t) = c1e2t + e−t
(c2 cos
√3t+ c3 sen
√3t
). (6.60)
La solucion general para la funcion y(t) la podemos obtener de la primera ecuacion del sistema(6.55), esto es
y(t) =12dx
dt=
12
[2c1e2t − e−t
(c2 cos
√3t+ c3 sen
√3t
)+
√3e−t
(c3 cos
√3t− c2 sen
√3t
)]= c1e
2t +12e−t
[(√
3c3 + c2) cos√
3t− (√
3c2 + c3) sen√
3t]. (6.61)
De la segunda ecuacion del sistema (6.55), obtenemos la funcion z(t), esto es
z(t) =12dy
dt= c1e
2t − 12e−t
[(√
3c3 + c2) cos√
3t− (√
3c2 − c3) sen√
3t]. (6.62)
Finalmente, tenemos las soluciones que satisfacen al sistema (6.55),
x(t) = c1e2t + e−t
(c2 cos
√3t+ c3 sen
√3t
),
y(t) = c1e2t +
12e−t
((√
3c3 + c2) cos√
3t− (√
3c2 + c3) sen√
3t),
z(t) = c1e2t − 1
2e−t
((√
3c3 + c2) cos√
3t− (√
3c2 − c3) sen√
3t). (6.63)
Ejemplo 6:
Resolver el siguiente sistema de ecuaciones con las condiciones dadas
dx
dt= 3x+ 8y,
dy
dt= −3y − x, x(0) = 6, y(0) = −2. (6.64)
Solucion:
Derivamos la primera ecuacion del sistema (6.64), y obtenemos
d2x
dt2= 3
dx
dt+ 8
dy
dt. (6.65)
Sustituimos en (6.65), la segunda ecuacion del sistema (6.64), obtenemos
d2x
dt2= 3
dx
dt+ 8
(− 3y − x
)= 3
dx
dt− 24y − 8x. (6.66)
De la primera ecuacion del sistema (6.64), despejamos y, esto es
y =18dx
dt− 3
8x, (6.67)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 277
y la sustituimos en la expresion (6.66), resulta
d2x
dt2= 3
dx
dt− 8x− 24
(18dx
dt− 3
8x)
= −8x+ 9x = x. (6.68)
Hemos obtenido la ecuaciond2x
dt2− x = 0. (6.69)
Esta es una ecuacion lineal respecto a x, de segundo orden con coeficientes constantes. Suponemosla solucion x(t) = emt, sustituyendo en (6.69), obtenemos la ecuacion caracterıstica y sus respectivasraıces
m2 − 1 = 0 → m = ±1. (6.70)
Entonces, la solucion general de (6.69), es
x(t) = c1et + c2e
−t. (6.71)
Para encontrar la solucion y(t) es necesario usar la expresion (6.67), para esto derivamos respecto at, la expresion (6.71), obtenemos
dx
dt= c1e
t − c2e−t. (6.72)
Sustituyendo en (6.67), las expresiones (6.72), y (6.71), obtenemos
y(t) =c18et − c2
8e−t − 3
8
(c1e
t + c2e−t
)= −c1
4et − c2
2e−t. (6.73)
Es decir, las soluciones generales del sistema (6.64), son (6.71), y (6.73), esto es
x(t) = c1et + c2e
−t,
y(t) = −c14et − c2
2e−t. (6.74)
Ahora solo nos queda hallar las constantes c1 y c2 de las condiciones iniciales dadas. Esto es, cuandot = 0, x = 6, y cuando t = 0, y = −2. Sustituyendo estos valores en el sistema (6.74), obtenemos
c1 + 2c2 = 8,c1 + c2 = 6. (6.75)
Resolviendo este sistema, hallamos los valores c1 = 4 y c2 = 2. Entonces, poniendo estos valores enla solucion general (6.74), obtenemos la solucion particular
x(t) = 4et + 2e−t,
y(t) = −et − e−t. (6.76)
Estas soluciones particulares, obtenidas de las soluciones generales (6.74), cumplen las condicionesdadas x(0) = 6, y y(0) = −2.
II Solucion de Sistemas de Ecuaciones Diferenciales Mediante Combinaciones Integrables
En algunos casos, combinando las ecuaciones del sistema de ecuaciones diferenciales (no necesari-amente lineales), despues de algunas operaciones (suma, resta, division, etc.), es posible obtenerecuaciones facilmente integrables de la forma
F(t, u,
du
dt
)= 0, (6.77)

278 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
donde u es una funcion de las funciones buscadas x1(t), x2(t), ..., xn(t). Este metodo se llama metodode combinaciones integrables.
Ejemplo 1:
Resolver el sistema de ecuaciones
dx
dt=
y2
x,
dy
dt=
x2
y. (6.78)
Solucion:
Este es un sistema no lineal. Escribamos el sistema (6.78), de la siguiente manera
xdx = y2dt,
ydy = x2dt. (6.79)
Sumando termino a termino, resulta
xdx+ ydy = (x2 + y2)dt → d(x2 + y2)2(x2 + y2)
= dt. (6.80)
Integrando la ultima expresion∫d(x2 + y2)x2 + y2
=∫
2dt → ln(x2 + y2) = 2t+ ln c1. (6.81)
Esta ultima expresion la podemos escribir como
x2 + y2 = c1e2t. (6.82)
Ahora, restando termino a termino la segunda ecuacion de la primera en (6.79), obtenemos
xdx− ydy = (y2 − x2)dt → d(x2 − y2)x2 − y2
= −2dt. (6.83)
Integrando ∫d(x2 − y2)x2 − y2
= −2∫dt, (6.84)
se obtienex2 − y2 = c2e
−2t. (6.85)
Entonces, tenemos el siguiente sistema de ecuaciones algebraicas
x2 + y2 = c1e2t
x2 − y2 = c2e−2t. (6.86)
Es facil resolver este sistema, mediante suma y resta. El resultado es
x(t) = ±√c1e2t + c2e−2t
y(t) = ±√c1e2t − c2e−2t, (6.87)
donde, c1 = c12 , y c2 = c2
2 . Las expresiones en (6.87), son las soluciones del sistema.

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 279
Ejemplo 2:
Resolver el sistema de ecuaciones
dx
dt=
1y,
dy
dt=
1x. (6.88)
Solucion:
Escribamos el sistema de la siguiente manera
ydx = dt,
xdy = dt. (6.89)
Sumando las dos ecuaciones resulta
ydx+ xdy = 2dt → d(xy) = 2dt. (6.90)
Integrando ∫d(xy) = 2
∫dt → xy = 2t+ c1. (6.91)
Ahora, restando una ecuacion de la otra del sistema (6.89), obtenemos
ydx− xdy = 0 → dx
x− dy
y= 0. (6.92)
Integrando ∫dx
x=
∫dy
y→ y = c2x. (6.93)
Entonces, tenemos el sistema de ecuaciones algebraicas
xy = 2t+ c1,
y = c2x. (6.94)
Sustituyendo la segunda ecuacion de (6.94), en la primera, obtenemos
x(t) =√
2t+ c1c2
. (6.95)
Luego, poniendo este resultado en la segunda ecuacion de (6.94), se tiene
y(t) = c2
√2t+ c1c2
=√c2(2t+ c1). (6.96)
Finalmente, las soluciones del sistema dado son
x(t) =√
2t+ c1c2
,
y(t) =√c2(2t+ c1). (6.97)
Ejemplo 3:

280 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Resolver el sistema de ecuaciones diferenciales con valores inicialesdx
dt=
x
x+ y,
dy
dt=
y
x+ y, x(0) = 1 y(0) = 2. (6.98)
Solucion:
Dividiendo la primera ecuacion entre la segunda, resultadxdtdydt
=x
x+yy
x+y
=x
y→ dx
dy=x
y. (6.99)
Esta ultima ecuacion es de variables separables. Separando las variables e integrando∫dx
x=
∫dy
y→ lnx = ln y + ln c1 → x = c1y. (6.100)
Ahora, sumando las dos ecuaciones del sistema (6.98), se tiene
dx
dt+dy
dt=
x
x+ y+
y
x+ y= 1 → dx+ dy = dt. (6.101)
Integrando la ultima ecuacion de (6.101),∫dx+
∫dy =
∫dt → x+ y = t+ c2. (6.102)
Entonces, hemos obtenido el sistema de ecuaciones algebraicasx = c1y,x+ y = t+ c2.
(6.103)
Resolviendo este sistema simultaneamente, obtenemos las funciones x(t) y y(t), las cuales tienen laforma
x(t) =c1(t+ c2)c1 + 1
,
y(t) =t+ c2c1 + 1
. (6.104)
Estas funciones constituyen las soluciones generales del sistema (6.98). Ahora nos queda por encon-trar una solucion particular que cumpla con las condiciones iniciales dadas en (6.98). Esto es, cuandot = 0, x = 1 y cuando t = 0, y = 2. Sustituyendo estas condiciones en (6.104), obtenemos el sistemade ecuaciones algebraicas
c1 + 1 = c1c2,
2(c1 + 1) = c2. (6.105)
Multiplicando la primer ecuacion por dos y restando la segunda a la primera ecuacion, obtenemos
2c1c2 − c2 = 0 → c2(2c1 − 1) = 0 → c2 = 0, c1 =12. (6.106)
Sustituyendo los valores encontrados de las constantes c1 y c2 en las soluciones generales (6.104),finalmente tenemos la solucion del problema (6.98), esta es
x(t) =13t,
y(t) =23t. (6.107)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 281
III Variacion de los Parametros
Sin perder generalidad, este metodo lo ilustraremos para el caso de un sistema de tres ecuacionesdiferenciales. Sea el sistema no homogeneo
dx
dt+ a1x+ b1y + e1z = f1(t),
dy
dt+ a2x+ b2y + e2z = f2(t),
dz
dt+ a3x+ b3y + e3z = f3(t). (6.108)
Supongamos que la solucion general del sistema homogeneo ya la conocemos, y tiene la forma
x(t) = c1x1 + c2x2 + c3x3,
y(t) = c1y + c2y2 + c3y3,
z(t) = c1z1 + c2z2 + c3z3. (6.109)
Nos queda por buscar una solucion particular del sistema no homogeneo (6.108). El metodo devariacion de los parametros consiste en ver a las constantes c1, c2 y c3 de (6.109), como parametrosque dependen de la variable independiente t, es decir, la solucion particular tiene la forma
x(t) = c1(t)x1 + c2(t)x2 + c3(t)x3,
y(t) = c1(t)y + c2(t)y2 + c3(t)y3,z(t) = c1(t)z1 + c2(t)z2 + c3(t)z3, (6.110)
donde c1(t), c2(t) y c3(t) son ahora funciones que debemos hallar. Estas funciones las podemosencontrar al sustituir (6.110), en (6.108). Sustituyendo (6.110), en la primera ecuacion de (6.108),tenemos
c′1x1 + c′2x2 + c′3x3+ + c1(x′1 + a1x1 + b1y1 + e1z1)+ c2(x′2 + a1x2 + b1y2 + e1z2)+ c3(x′3 + a1x3 + b1y3 + e1z3) = f1(t). (6.111)
Todas las sumas que estan dentro de los parentesis son cero, (ya que el sistema (6.110), es solucionde la ecuacion homogenea correspondiente). Por consiguiente, tendremos
c′1x1 + c′2x2 + c′3x3 = f1(t). (6.112)
De manera analoga, al sustituir (6.110), en la segunda y tercera ecuacion de (6.108), obtendremosel siguiente sistema de ecuaciones para las c′1, c
′2 y c′3, estas son
c′1x1 + c′2x2 + c′3x3 = f1(t),c′1y1 + c′2y2 + c′3y3 = f2(t),c′1z1 + c′2z2 + c′3z3 = f3(t). (6.113)
Este sistema es lineal respecto a c′1, c′2, c
′3, y tiene solucion, puesto que su determinante
det
x1 x2 x3
y1 y2 y3z1 z2 z3
6= 0, (6.114)

282 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
debido a la independencia lineal de las soluciones del sistema homogeneo correspondiente. Una vezconocidas c′1, c
′2 y c′3 e integrando, hallamos c1(t), c2(t) y c3(t), y, por consiguiente, la solucion de
(6.110), del sistema no homogeneo (6.108).
Ejemplo 1:
Resolver el siguiente sistema de ecuaciones no homogeneo con las condiciones iniciales dadas
2dx
dt− 6x+ y = −6t2 − t+ 3,
dy
dt− 2y = −2t− 1, x(0) = 2, y(0) = 3. (6.115)
Solucion:
Primero resolvemos el sistema homogeneo correspondiente. Esto es, el sistema
2dx
dt− 6x+ y = 0,
dy
dt− 2y = 0. (6.116)
Derivamos la primera ecuacion de (6.116), obtenemos
2d2x
dt2− 6
dx
dt+dy
dt= 0. (6.117)
Luego, sustituyendo la segunda ecuacion en (6.117), resulta
2d2x
dt2− 6
dx
dt+ 2y = 0 → d2x
dt2− 3
dx
dt+ y = 0. (6.118)
Despejando y de la primera ecuacion de (6.116), se obtiene
y = 6x− 2dx
dt. (6.119)
Luego, sustituimos y en (6.118), tenemos
d2x
dt2− 5
dx
dt+ 6x = 0. (6.120)
Esta es una ecuacion lineal con coeficientes constantes. Sea x(t) = emt la solucion. Sustituyendo en(6.120), resulta la ecuacion caracterıstica
m2 − 5m+ 6 = 0 → (m− 3)(m− 2) = 0 → m1 = 3, m2 = 2. (6.121)
Entonces, la solucion general de la ecuacion (6.120), es
x(t) = c1e3t + c2e
2t. (6.122)
Derivamos, respecto a t, esta expresion
dx
dt= 3c1e3t + 2c2e2t. (6.123)
Poniendo las expresiones (6.123), y (6.122), en (6.119), obtenemos la expresion para y(t), esto es
y(t) = 6(c1e
3t + c2e2t
)− 2
(3c1e3t + 2c2e2t
)= 2c2e2t. (6.124)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 283
Por consiguiente, tenemos las soluciones generales del sistema homogeneo, estas son
xh(t) = c1e3t + c2e
2t,
yh(t) = 2c2e2t. (6.125)
El metodo de variacion de los parametros consiste en tomar a las constantes de las solucioneshomogeneas como funciones de t, y sustituirlas en la ecuacion no homogenea con el proposito dehallar a las funciones c1(t) y c2(t). Del sistema (6.125), tenemos el siguiente sistema
xp(t) = c1(t)e3t + c2(t)e2t,
yp(t) = 2c2(t)e2t. (6.126)
Derivando este sistema, obtenemos
dxp
dt= c′1e
3t + 3c1e3t + c′2e2t + 2c2e2t,
dyp
dt= 2c′2e
2t + 4c2e2t. (6.127)
Sustituyendo estos resultados en el sistema no homogeneo (6.115), obtenemos el sistema de ecua-ciones
c′1e3t + c′2e
2t = −3t2 − 12t+
32,
2c′2e2t = −2t− 1. (6.128)
Resolviendo este sistema, tenemos
c′1 =(1
2t− 3t2 + 2
)e−3t,
c′2 =(− t− 1
2
)e−2t. (6.129)
Integrando la primera ecuacion, tenemos
c1(t) =∫ (1
2t− 3t2 + 2
)e−3tdt. (6.130)
Esta integral se calcula por partes y el resultado es
c1(t) =(t2 − 1
2t− 1
2
)e−3t. (6.131)
De la segunda ecuacion en (6.129), tenemos la integral
c2(t) =∫ (
− t− 12
)e−2tdt. (6.132)
Esta integral se calcula facilmente, y el resultado es
c2(t) =12
(t+ 1
)e−2t. (6.133)
Sustituyendo las funciones c1(t) y c2(t) en la expresion (6.126), tenemos, la solucion particular de laecuacion no homogenea (6.115),
xp(t) = t2 + t,
yp(t) = t+ 1. (6.134)

284 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
La solucion general de (6.115), estara dada por la suma de las soluciones homogeneas (6.125), y lassoluciones particulares (6.134), esto es
x(t) = c1e3t + c2e
2t + t2 + t,
y(t) = 2c2e2t + t+ 1. (6.135)
Ahora nos queda por encontrar las soluciones que satisfacen las condiciones iniciales. Sustituyendolas condiciones iniciales en las soluciones (6.135), obtenemos el sistema
c1 + c2 = 4,2c2 + 1 = 3. (6.136)
Resolviendo este sistema, hallamos los valores de las constantes, estos son; c1 = 3 y c2 = 1. Poniendoestos valores en (6.135), obtenemos, finalmente, la solucion del problema (6.115),
x(t) = 3e3t + e2t + t2 + t,
y(t) = 2e2t + t+ 1. (6.137)
Ejemplo 2:
Resolver el sistema de ecuaciones
dx
dt+ 2x+ 4y = 4t+ 1,
dy
dt+ x− y =
32t2. (6.138)
Solucion:
El sistema homogeneo correspondiente tiene la forma
dx
dt+ 2x+ 4y = 0,
dy
dt+ x− y = 0. (6.139)
Derivando la primera ecuacion de (6.139), obtenemos
d2x
dt2+ 2
dx
dt+ 4
dy
dt= 0. (6.140)
Sustituyendo la segunda ecuacion de (6.139), en (6.140), resulta
d2x
dt2+ 2
dx
dt− 4x+ 4y = 0. (6.141)
Luego, de la primera ecuacion de (6.139), despejamos a y, tenemos
y = −12x− 1
4dx
dt. (6.142)
Sustituyendo esta expresion en (6.141), obtenemos la siguiente ecuacion diferencial
d2x
dt2+dx
dt− 6x = 0. (6.143)

6.1. SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 285
Supongamos las solucion x(t) = emt, sustituyendo en (6.143), obtenemos la ecuacion caracterısticacon sus correspondientes raıces
m2 +m− 6 = 0 → (m+ 3)(m− 2) = 0 → m1 = −3, m2 = 2. (6.144)
Entonces, las solucion general de la ecuacion homogenea (6.143), es
xh(t) = c1e−3t + c2e
2t. (6.145)
Derivando, respecto a t, esta expresion obtenemos
dx
dt= −3c1e−3t + 2c2e2t. (6.146)
Sustituyendo las expresiones (6.146), y (6.145), en (6.142), obtenemos
yh(t) =c14e−3t − c2e
2t. (6.147)
Finalmente, tenemos las soluciones de la ecuacion homogenea (6.139), estas son
xh(t) = 4c1e−3t + c2e2t,
yh(t) = c1e−3t − c2e
2t, (6.148)
donde hemos hecho el cambio c1 → c1/4. Para encontrar la solucion general del sistema (6.138),tomamos a las constates c1 y c2 como funciones de t en (6.148), esto es
xp(t) = 4c1(t)e−3t + c2(t)e2t,
yp(t) = c1(t)e−3t − c2(t)e2t. (6.149)
Al sustituir el sistema (6.149), en la ecuacion no homogena (6.138), obtenemos el siguiente sistema
4c′1e−3t + c′2e
2t = 4t+ 1,
c′1e−3t − c′2e
2t =32t2. (6.150)
Al resolver este sistema, respecto a c′1(t) y c′2(t), tenemos
c′1 =( 3
10t2 +
45t+
15
)e3t,
c′2 =(− 6
5t2 +
45t+
15
)e−2t. (6.151)
Ahora nos queda integrar este sistema. Las integraciones se hacen por partes y el resultado es
c1(t) =( t
5+t2
10
)e3t,
c2(t) =( t
5+
3t2
5
)e−2t. (6.152)
Sustituyendo estos resultado en el sistema (6.149), obtenemos las soluciones particulares
xp(t) = t2 + t,
yp(t) = −12t2. (6.153)

286 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Finalmente, sumando las soluciones particulares (6.153), a las homogeneas (6.148), obtenemos lasolucion general del sistema no homogeneo (6.138),
x(t) = 4c1e−3t + c2e2t + t2 + t,
y(t) = c1e−3t − c2e
2t − 12t2, (6.154)
donde c1 y c2 son ciertas constantes arbitrarias que dependen de las condiciones iniciales.
Antes de analizar el siguiente metodo vamos a introducir dos conceptos fundamentales que serande gran ayuda para resolver sistemas de ecuaciones lineales homogeneos.
6.2. Valores Propios y Vectores Propios
Supongamos que tenemos la ecuacion
AY = λY, (6.155)
donde, Aij es una matriz dada, λ es un numero real o imaginario por determinarse, y Y es un vectortambien por determinar. De la ecuacion (6.155), se sigue, que para toda λ, una solucion es Y = 0.Un escalar λ tal que para cierto vector Y 6= 0 la ecuacion (6.155), se cumple, se le llama valor propiode la matriz A y al correspondiente vector Y 6= 0 se le conoce como vector propio de A. La ecuacion(6.155), la podemos escribir de la siguiente manera
AY − λY = 0 ⇐⇒ (A− λI)Y = 0, (6.156)
donde I representa la matriz unidad. La ecuacion (6.156), representa n ecuaciones algebraicas linealescon n incognitas y1, y2, ..., yn, que son las componentes del vector Y. Para que estas ecuaciones tengansolucion no trivial, es decir, para que Y 6= 0, es necesario que la matriz formada por
(A− λI) = 0, (6.157)
es decir, que sea singular. Luego, la expresion (6.157), sera singular si y solo si, su determinante escero. Esto es, si se cumple la relacion
det(A− λI) = 0. (6.158)
A este determinante se le conoce como determinante caracterıstico de la matriz A.
Supongamos que la matriz A en la ecuacion (6.156) es de 2× 2, entonces
(a11 − λ)y1 + a12y2 = 0,a21y1 + (a22 − λ)y2 = 0. (6.159)
El determinante caracterıstico es
det(A− λI) = det(a11 − λ a12
a21 a22 − λ
)= (a11 − λ)(a22 − λ)− a12a21
= λ2 − (a11 + a22)λ+ a11a22 − a12a21 = 0. (6.160)
A esta ecuacion se le conoce con el nombre de ecuacion caracterıstica de A. Sus soluciones son losvalores propios λ1 y λ2 de A.
El procedimiento para encontrar los valores propios y los vectores propios del sistema (6.155), esel siguiente:

6.2. VALORES PROPIOS Y VECTORES PROPIOS 287
Resolver la ecuacion caracterıstica (6.160), para determinan los valores propios λ1, λ2.
Sustituyendo el valor de λ1 en la ecuacion (6.159), se determina su correspondiente vector pro-pio Y1 de A. Despues se sustituye el valor de λ2 en (6.159), y se determina el correspondientevector propio Y2 de A.
Ejemplo 1:
Hallar los valores propios y vectores propios de la siguiente matriz
A =(
2 41 2
). (6.161)
Solucion:
Sustituyendo los valores de la matriz A en la expresion (6.159), resulta el sistema de ecuaciones
(2− λ)y1 + 4y2 = 0,y1 + (2− λ)y2 = 0. (6.162)
El determinante caracterıstico para la matriz A, es
det(A− λI) = det(
2− λ 41 2− λ
)= (2− λ)(2− λ)− 4 = λ(λ− 4) = 0. (6.163)
De donde obtenemos las raıces λ1 = 0 y λ2 = 4. Luego, tenemos que para
λ = 0, el sistema (6.162), es
2y1 + 4y2 = 0,y1 + 2y2 = 0. (6.164)
De la segunda ecuacion, tenemosy1 = −2y2. (6.165)
Entonces, podemos darle un valor arbitrario a y2 y de esta manera encontrar a y1. Eligiendo y2 = 1,entonces, tenemos que y1 = −2. Luego el vector Y1 tiene las componentes
Y1 =(−21
). (6.166)
Para el caso en que λ = 4, de la ecuacion (6.162), tenemos
(2− 4)y1 + 4y2 = 0y1 + (2− 4)y2 = 0. (6.167)
Esto es
−2y1 + 4y2 = 0y1 − 2y2 = 0. (6.168)
De la segunda ecuacion, tenemos y1 = 2y2. Eligiendo λ2 = 1, resulta que λ1 = 2. El vector propioY2 tiene las componentes
Y2 =( 1
2
). (6.169)

288 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Ejemplo 2:
Hallar los valores propios y los vectores propios de la siguiente matriz
A =
6 −12 −11 −3 −1−4 12 3
. (6.170)
Solucion:
De la ecuacion (6.156), para encontrar los valores y vectores propios, tenemos el sistema deecuaciones
(6− λ)y1 − 12y2 − y3 = 0,y1 + (−3− λ)y2 − y3 = 0,
−4y1 + 12y2 + (3− λ)y3 = 0. (6.171)
El determinante caracterıstico para la matriz A, es
det(A− λI) = det
6− λ −12 −11 −3− λ −1−4 12 3− λ
= (6− λ)(λ2 − 9)− (6.172)
− 48− 12 + 12 + 4λ+ 72− 12λ+ 36− 12λ = λ3 − 6λ2 + 11λ− 6 = 0.
Las raıces de esta ecuacion, es decir, los valores propios son λ1 = 1, λ2 = 2 y λ3 = 3. Eligiendo elprimer valor propio, es decir, para λ1 = 1, tenemos el sistema de ecuaciones
5y1 − 12y2 − y3 = 0,y1 − 4y2 − y3 = 0,
−4y1 + 12y2 + 2y3 = 0. (6.173)
Para resolver este sistema, dividimos la tercera ecuacion entre 2 y sumando la segunda y la terceraecuacion, obtenemos
y1 = 2y2. (6.174)
Le damos un valor arbitrario a y2, elijamos y2 = 1, entonces, de (6.174), tenemos que y1 = 2.Despues, sustituyendo estos valores en la segunda ecuacion, obtendremos el valor de y3, esto es
y3 = y1 − 4y2 → y3 = 2− 4 = 2. (6.175)
Entonces, tenemos que para el valor propio λ1 = 1, el vector propio es
Y1 =
21−2
. (6.176)
Para el segundo valor propio, λ2 = 2, de (6.171), resulta el sistema de ecuaciones
4y1 − 12y2 − y3 = 0,y1 − 5y2 − y3 = 0,
−4y1 + 12y2 + y3 = 0. (6.177)
A la primera ecuacion le restamos la segunda, obtenemos
y1 =73y2. (6.178)

6.3. SISTEMAS DE ECUACIONES LINEALES HOMOGENEOS 289
Eligiendo y2 = 3, tenemos que λ1 = 7. Sustituyendo estos valores en la segunda ecuacion de (6.177),resulta
y3 = y1 − 5y2 = 28− 36 → y3 = −8. (6.179)
Entonces, para el valor propio y1 = 2, tenemos el vector propio
Y2 =
73−8
. (6.180)
Para el caso λ3 = 3, tenemos el sistema
3y1 − 12y2 − y3 = 0,y1 − 6y2 − y3 = 0,
−4y1 + 12y2 + 0 = 0. (6.181)
De la tercera ecuacion, tenemosy1 = 3y2. (6.182)
Eligiendo, y2 = 1, tenemos que y1 = 3. Sustituyendo estos valores en la primer ecuacion de (6.181),hallamos el valor de y3,
y3 = 3y1 − 12y2 = 9− 12 = −3 → y3 = −3. (6.183)
Finalmente, el vector propio correspondiente a λ3, es
Y3 =
13−3
. (6.184)
Podemos concluir, que los valores propios de la matriz (6.170), son λ1 = 1, λ2 = 2 y λ3 = 3, y suscorrespondientes vectores propios estan dados por las expresiones (6.176, 6.180, 6.184).
6.3. Sistemas de Ecuaciones Lineales Homogeneos
IV Metodo de Euler para la Integracion de un Sistema de Ecuaciones
Empezaremos con un sistema de ecuaciones diferenciales sencillo y analizaremos un metodo pararesolverlo, despues mostraremos el metodo general.
Ejemplo 1:
Hallar la solucion general del sistema de ecuaciones diferenciales con coeficientes constantes
y′1 = −4y1 − 3y2,y′2 = 6y1 + 5y2. (6.185)
Solucion:
Para resolver este sistema vamos a suponer soluciones del tipo
y1 = α1eλt, y2 = α2e
λt, (6.186)

290 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
donde α1, α2 y λ son constantes arbitrarias, las cuales debemos determinar. Derivando las solucionespropuestas (6.186), obtenemos
y′1 = λα1eλt, y′2 = λα2e
λt. (6.187)
Sustituyendo (6.187), en (6.185), y cancelando el factor exponencial eλt, resulta el sistema
−4α1 − 3α2 = λα1,
6α1 + 5α2 = λα2. (6.188)
Para un valor dado de λ este es un sistema algebraico homogeneo. Este sistema lo podemos escribircomo
(−4− λ)α1 − 3α2 = 0,6α1 + (5− λ)α2 = 0. (6.189)
La solucion trivial (α1 = α2 = 0), de este sistema no es util, ya que corresponde a la solucion trivialy1 = y2 = 0, la cual no puede formar parte de un conjunto fundamental de soluciones del sistema.Por tal motivo vamos a considerar aquellos valores de λ (valores propios) para los cuales existensoluciones no triviales. Estos valores de λ son aquellos para los cuales el determinante del sistema(6.189), es cero, esto es
det(−4− λ −3
6 5− λ
)= (−4− λ)(5− λ) + 18 = λ2 − λ− 2 = (λ− 2)(λ+ 1) = 0. (6.190)
Las soluciones son λ1 = 2 y λ2 = −1. Eligiendo λ1 = 2 y sustituyendo en (6.189), obtenemos
−6α1 − 3α1 = 0,6α1 + 3α2 = 0. (6.191)
Resolviendo este sistema, encontramos que α1 = −α22 , de donde, α2 se puede escoger arbitrariamente.
Eligiendo α2 = 2, entonces α1 = −1 y la solucion es
y1 = −e2t, y2 = 2e2t. (6.192)
Esta misma solucion la podemos escribir de la siguiente manera
Y1 =(−12
)e2t, (6.193)
llamada forma vectorial. Al poner λ2 = −1 en (6.189), se obtiene el sistema
−3α1 − 3α2 = 0,6α1 + 6α2 = 0. (6.194)
Resolviendo este sistema, tenemos que α1 = −α2. Eligiendo α2 = 1, tenemos las soluciones
y1 = −e−t, y2 = e−t. (6.195)
En forma vectorial se escribe como
Y2 =(−11
)e−t (6.196)
Para la expresion (6.189), los coeficientes constantes obtenidos, λ1 y λ2, son los valores propios(eigenvalores) de la matriz de coeficientes (6.189), y los vectores (6.193), y (6.196), son los corres-pondientes vectores propios (eigenvectores) de la matrız (seccion 6.2 valores propios y vectores

6.3. SISTEMAS DE ECUACIONES LINEALES HOMOGENEOS 291
propios). Entonces, la solucion general del sistemas sera la combinacion lineal de las soluciones(6.193) y (6.196),
Y = c1Y1 + c2Y2 = c1
(−12
)e2t + c2
(−11
)e−t. (6.197)
Esta solucion esta escrita en forma vectorial. Sin embargo, esta misma solucion la podemos escribirde la siguiente manera
y1(t) = −c1e2t − c2e−t,
y2(t) = 2c1e2t + c2e−t. (6.198)
Ahora estamos listos para analizar la teorıa general de los sistemas de ecuaciones diferenciales linealescon coeficientes constantes.
De la ecuacion (6.6), se deduce que un sistema de ecuaciones diferenciales homogeneas tiene laforma
dY(t)dt = A(t)Y(t) (6.199)
Teorema 6.3.1. Sea Y1,Y2, ...,Yk un conjunto de vectores solucion del sistema homogeneo (6.199)en un intervalo I. Entonces, la combinacion lineal
Y = c1Y1 + c2Y2 + ...+ ckYk (6.200)
donde los coeficientes ci, (i = 1, 2, ..., k), son constantes arbitrarias, tambien es una solucion en elintervalo dado.
Sea Y1,Y2, ...,Yk un conjunto de vectores solucion del sistema homogeneo (6.199) en un inter-valo I. Entonces, decimos que el conjunto es linealmente dependiente en el intervalo dado, si existenconstantes c1, c2, ..., ck, no todas nulas, tales que
c1Y1 + c2Y2 + ...+ ckYk = 0 (6.201)
para todo t del intervalo. Si el conjunto de vectores no es linealmente dependiente en el intervalo, sedice que es linealmente independiente .
En las ecuaciones diferenciales ordinarias introducimos el Wronskiano para determinar la de-pendencia lineal de un conjunto de soluciones. Este es valido tambien para el caso de sistemas deecuaciones lineales.
Teorema 6.3.2. Sean
Y1 =
y11y21...yn1
, Y2 =
y12y22...yn2
... Yn =
y1n
y2n...ynn
, (6.202)

292 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
n vectores solucion del sistema homogeneo (6.199) en un intervalo dado. Una condicion necesaria ysuficiente para que el conjunto de soluciones sea linealmente independiente es que el Wronskiano
W (Y1,Y2, ...,Yn) = det
y11 y12 . . . y1n
y21 y22 . . . y2n...
...yn1 yn2 . . . ynn
6= 0 ∀t ∈ I (6.203)
Observacion:
Existe una diferencia respecto a la definicion del Wronskiano que se dio anteriormente. El Wron-skiano (6.203) no involucra las derivadas de las funciones.
Sean Y1,Y2, ...,Yn un conjunto de n vectores solucion linealmente independiente del sistemahomogeneo (6.199), en un intervalo dado I. Entonces, diremos que Y1,Y2, ...,Yn forman un conjuntofundamental de soluciones en el intervalo I . Por consiguiente, la solucion general del sistema (6.199),en el intervalo se define como
Y(t) = c1Y1 + c2Y2 + ...+ cnYn (6.204)
donde c1, c2, ..., cn son constantes arbitrarias, las cuales pueden ser obtenidas de las condicionesiniciales.
Para el caso de sistemas lineales no homogeneos, una solucion particular Yp en un intervalo Ies cualquier vector que no contiene constantes arbitrarias y tal que sus elementos son funciones quesatisfacen el sistema (6.6).
Teorema 6.3.3. Sean Y1,Y2, ...,Yn un conjunto de vectores solucion del sistema homogeneo(6.199) en un intervalo I, y sea Yp cualquier vector solucion del sistema no homogeneo (6.6) en elmismo intervalo. Entonces
Y = c1Y1 + c2Y2 + ...+ cnYn + Yp (6.205)
tambien es solucion del sistema no homogeneo (6.6) en el intervalo I, cualesquiera que sean lasconstantes c1, c2, ..., cn.
Si Y1,Y2, ...,Yn forman un conjunto fundamental de soluciones del sistema homogeneo (6.199)en un intervalo I, entonces, la solucion general se puede escribir como
Y = c1Y1 + c2Y2 + ...+ cnYn = c1
y11y21...yn1
+ c2
y12y22...yn2
+ ...+ cn
y1n
y2n...ynn
=
c1y11 + c2y12 + . . .+ cny1n
c1y21 + c2y22 + . . .+ cny2n...
c1yn1 + c2yn2 + . . .+ cnynn
(6.206)

6.3. SISTEMAS DE ECUACIONES LINEALES HOMOGENEOS 293
Este mismo sistema lo podemos escribir como el producto de matrices. Esto es, como
Y =
y11 y12 . . . y1n
y21 y22 . . . y2n...yn1 yn2 . . . ynn
c1c2...cn
. (6.207)
Sea un sistema homogeneo de ecuaciones diferenciales lineales
dy1dt
= a11y1 + a12y2 + ...+ a1nyn,
dy2dt
= a21y1 + a22y2 + ...+ a2nyn,
...
dyn
dt= an1y1 + an2y2 + ...+ annyn, (6.208)
donde los coeficientes aij son constantes, t es el argumento; y1(t), y2(t), ..., yn(t) son las funcionesdesconocidas. El sistema (6.208), se llama sistema de ecuaciones diferenciales con coeficientes cons-tantes. Como vimos anteriormente, el sistema (6.208), se puede resolver reduciendolo a una ecuacionde orden n, la cual, en este caso, sera lineal. Sin embargo, el sistema (6.208), se puede resolver por otrometodo, sin necesidad de reducirlo a una ecuacion de orden n. Este metodo nos permitira analizarde una manera mas ilustrativa, el caracter de las soluciones.
Busquemos una solucion del sistema de la forma
y1 = α1eλt, y2 = α2e
λt, . . . , yn = αneλt. (6.209)
Ahora debemos determinar las constantes α1, α2, . . . , αn y λ de tal modo que las funciones α1eλt,
α2eλt, . . . , αne
λt satisfagan el sistema de ecuaciones (6.208). Sustituyendo (6.209) en en el sistema(6.208), obtenemos
α1λeλt = (a11α1 + a12α2 + . . .+ a1nαn)eλt,
α2λeλt = (a21α1 + a22α2 + . . .+ a2nαn)eλt,
...αnλe
λt = (an1α1 + an2α2 + . . .+ annαn)eλt. (6.210)
Eliminando el exponente del sistema (6.210), pasando todos los terminos a un solo lado y reuniendolos coeficientes de α1, α2, ..., αn, obtenemos el sistema de ecuaciones
(a11 − λ)α1 + a12α2 + . . .+ a1nαn = 0,a21α1 + (a22 − λ)α2 + . . .+ a2nαn = 0,
...
an1α1 + an2α2 + . . .+ (ann − λ)αn = 0. (6.211)
Debemos elegir α1, α2, ..., αn y λ tales que satisfagan el sistema (6.211). El sistema (6.211) es unsistema de ecuaciones algebraicas respecto a α1, α2, ..., αn. Construyamos el determinante del sistema
P (λ) = det
(a11 − λ) a12 . . . a1n
a21 (a22 − λ) . . . a2n
......
an1 an2 . . . (ann − λ)
. (6.212)

294 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Si λ, es tal que el determinante (6.212), ∆(λ) sea diferente de cero, el sistema (6.211), tiene sololas soluciones α1 = α2 = ...αn = 0, y por consiguiente las formulas (6.209), nos dan solamente lassoluciones triviales
y1(t) = y2(t) =, ... = yn(t) = 0. (6.213)
Las soluciones no triviales del sistema (6.209), son aquellas para las cuales los valores propios λreducen el determinante (6.212), a cero
P (λ) = det
(a11 − λ) a12 . . . a1n
a21 (a22 − λ) . . . a2n
......
an1 an2 . . . (ann − λ)
= 0. (6.214)
De esta manera, si el sistema es de n ecuaciones diferenciales, entonces, tendremos una ecuacion den−esimo orden respecto a λ. Esta ecuacion es la ecuacion caracterıstica del sistema (6.210), y susraıces se llaman raıces de la ecuacion caracterıstica. Para la ecuacion caracterıstica (6.214), tenemoslos siguientes casos:
Primer caso: Las raıces de de la ecuacion caracterıstica son reales y diferentes. Supongamosque λ1, λ2, ..., λn son las raıces de la ecuacion caracterıstica (6.214). Escribamos el sistema (6.214),para cada raız λi y determinamos los coeficientes
α(i)1 , α
(i)2 , ..., α(i)
n . (6.215)
Se puede demostrar que uno de los coeficientes es arbitrario, el cual podemos suponer igual a uno.De este modo: Para la raız λ1, la solucion del sistema (6.214), es
y(i)1 = α
(i)1 eλ1t, y
(i)2 = α
(i)2 eλ2t, ..., y(i)
n = α(i)n eλnt. (6.216)
para la raız λn la solucion del sistema (6.216), es
y(n)1 = α
(n)1 eλnt, y
(n)2 = α
(n)2 eλnt, ..., y(n)
n = α(n)n eλnt. (6.217)
Mediante la sustitucion directa en las ecuaciones concluimos que el sistema de funciones
y1 = c1α(1)1 eλ1t + c2α
(2)2 eλ2t + . . .+ cnα
(n)1 eλnt
y2 = c1α(1)2 eλ1t + c2α
(2)2 eλ2t + . . .+ cnα
(n)2 eλnt (6.218)
... (6.219)yn = c1α
(1)n eλ1t + c2α
(2)n eλ2t + . . .+ cnα
(n)n eλnt,
donde c1, c2, ..., cn son constantes arbitrarias, tambien es la solucion del sistema de ecuaciones diferen-ciales (6.208). Esta es la solucion general del sistema (6.208). Es facil demostrar que se pueden hallartales valores de las constantes, para los cuales la solucion satisface las condiciones iniciales dadas.
Segundo caso Raıces complejas: Supongamos que entre las raıces de la ecuacion caracterısticahay dos raıces complejas:
λ1 = β + iγ, λ2 = β − iγ. (6.220)
A estas raıces le corresponden las soluciones:
y(1)j = λ
(1)j e(β+iγ), y
(2)j = λ
(2)j e(β−iγ), (j = 1, 2, 3..., n). (6.221)

6.3. SISTEMAS DE ECUACIONES LINEALES HOMOGENEOS 295
Donde los coeficientes λ(1)j y λ(2)
j se determinan del sistema de ecuaciones (6.214). Se puede mostrarque las partes real e imaginaria de la solucion compleja son tambien soluciones. De esta maneraobtenemos dos soluciones
y(1)j = eβt
(η(1)j cos (γy) + η
(2)j sen (γy)
)y(2)j = eβt
(η(2)j cos (γy) + η
(2)j sen (γy)
), (6.222)
donde η(1)j , η
(2)j , η
(1)j y η(2)
j son numeros reales, determinados mediante los λ(1)j y λ(2)
j . Las combina-ciones correspondientes de las funciones (6.222), entran en la solucion general del sistema.
Ejemplo 2:
Hallar la solucion general del sistema de ecuaciones
d2x
dt2= a11x+ a12y
d2y
dt2= a21x+ a22y, (6.223)
Solucion:
Segun la teorıa general antes vista, las soluciones tienen la forma
x = α1eλt, y = α2e
λt. (6.224)
Sustituyendo estas expresiones en el sistema (6.223), y eliminando la funcion exponencial eλt, obte-nemos un sistema de ecuaciones para determinar α1, α2 y λ
(a11 − λ2)α1 + a12α2 = 0,(a21α1 + (a22 − λ2)α2 = 0. (6.225)
Las soluciones que nos interesan son aquellas para las cuales el determinante es igual a cero, es decir
det(
(a11 − λ2) a12
a21 (a22 − λ2)
)= 0. (6.226)
Esta es la ecuacion caracterıstica para el sistema (6.225). Es una ecuacion de cuarto orden respectoa λ. Sean λ1, λ2, λ3 y λ4 sus raıces (supongamos que las raıces son diferentes). Para cada raız λi delsistema (6.225), hallamos los valores de α1 y α2. Entonces, la solucion general tiene la forma
x(t) = c1α(1)1 eλ1t + c2α
(2)1 eλ2t + c3α
(3)1 eλ3t + c4α
(4)1 eλ4t,
y(t) = c1α(1)2 eλ1t + c2α
(2)2 eλ2t + c3α
(3)” eλ3t + c4α
(4)2 eλ4t. (6.227)
Si entre las raıces hay unas complejas, a cada par de raıces complejas en la solucion general corres-ponden las expresiones de la forma (6.222).
Ejemplo 3:
Hallar la solucion general del siguiente sistema
dx
dt= 2x+ y,
dy
dt= 3x+ 4y. (6.228)

296 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Solucion:
La matriz A correspondiente al sistema (6.228), tiene la forma
A =(
2 13 4
). (6.229)
Luego, la ecuacion caracterıstica esta dada por la expresion
det(A− λI) = det(
2− λ 13 4− λ
)= 0 → λ2− 6λ+ 5 = 0 → (λ− 5)(λ− 1) = 0. (6.230)
De esta expresion obtenemos los valores propios, estos son: λ1 = 5 y λ2 = 1.
Luego, las componentes de los vectores propios los hallamos resolviendo el sistema(2− λ 1
3 4− λ
) (xy
)= 0, (6.231)
para cada valor de λ.
Para el primer caso, λ1 = 5, de (6.231), resulta el sistema
−3x+ y = 0,3x− y = 0. (6.232)
Las soluciones de este sistema son: x = 1, y y = 3. Estas vienen siendo las componentes del vectorpropio que representaremos como
V =(xy
)=
(13
). (6.233)
Para el segundo caso, λ2 = 1, tenemos el sistema
x+ y = 0,3x+ 3y = 0. (6.234)
Las soluciones son: y = 1 y x = −1. Entonces, el vector propio correspondiente tiene la forma
V =(xy
)=
(−11
). (6.235)
Finalmente, el resultado lo podemos escribir en forma matricial, esto es, de la siguiente manera(x(t)y(t)
)= c1V1e
5t + c2V2et = c1
(13
)e5t + c2
(−11
)et. (6.236)
Esta misma expresion la podemos escribir en su forma equivalente
x(t) = c1e5t − c2e
t,
y(t) = 3c1e5t + c2et. (6.237)
Las constantes c1 y c2 son constates arbitrarias y se obtienen de las condiciones iniciales.
Ejemplo 4:

6.3. SISTEMAS DE ECUACIONES LINEALES HOMOGENEOS 297
Resolver el sistema de ecuaciones
dx
dt= x− y,
dy
dt= x+ y. (6.238)
Solucion:
La matriz A correspondiente al sistema (6.238), tiene la forma
A =(
1 −11 1
). (6.239)
Luego, la ecuacion caracterıstica esta dada por la expresion
det(A− λI) = det(
1− λ −11 1− λ
)= 0 → λ2 − 2λ+ 2 = 0. (6.240)
De esta expresion obtenemos los valores propios, estos son: λ1 = 1 + i y λ2 = 1− i.
Luego, las componentes de los vectores propios los hallamos resolviendo el sistema(1− λ −1
1 1− λ
) (xy
)= 0, (6.241)
para cada valor de λ.
Para el primer caso, λ1 = 1 + i, de (6.241), resulta el sistema
−ix− y = 0,x− iy = 0. (6.242)
Las soluciones de este sistema son: x = 1, y y = −i. Estas vienen siendo las componentes del vectorpropio
V =(xy
)=
(1−i
). (6.243)
Para el segundo caso, λ2 = 1− i, tenemos el sistema
ix− y = 0,x+ iy = 0. (6.244)
Las soluciones son: x = 1 y y = i. Entonces, el vector propio correspondiente, tiene la forma
V =(xy
)=
(1i
). (6.245)
Finalmente, el resultado lo podemos escribir en forma matricial, esto es, de la siguiente manera(x(t)y(t)
)= c1V1e
(1+i)t + c2V2e(1−i)t = c1
(1−i
)e(1+i)t + c2
(1i
)e(1−i)t. (6.246)
Ahora, deseamos encontrar las soluciones reales del sistema (6.238). Para esto usamos la formula deEuler eix = cosx+ i senx, tenemos
eit
(1−i
)=
(cos tsen t
)+ i
(sen t− cos t
). (6.247)

298 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Sustituyendo este resultado en la expresion compleja (6.246), tenemos las soluciones reales(x(t)y(t)
)= c1e
t
(cos tsen t
)+ c2e
t
(sen t− cos t
). (6.248)
Esta misma expresion la podemos escribir en su forma equivalente
x(t) = c1et cos t+ c2e
t sen t,y(t) = c1e
t sen t− c2et cos t. (6.249)
Las constantes c1 y c2 son arbitrarias y se obtienen de las condiciones iniciales.
Ejemplo 5:
Hallar las soluciones del siguiente sistema de ecuaciones
Ejemplo 6:
Hallar las soluciones del siguiente sistema de ecuaciones
dx
dt= 2x+ y + z,
dy
dt= −2x− z,
dz
dt= 2x+ y + 2z. (6.250)
Solucion:
La matriz correspondiente al sistema (6.250), tiene la forma
A =
2 1 1−2 0 −12 1 2.
(6.251)
Para obtener los valores propios, debemos resolver la ecuacion caracterıstica
det(A− λI) = det
2− λ 1 1−2 −λ −12 1 2− λ
= 0 → λ3 − 4λ2 + 5λ− 2 = 0. (6.252)
Obtenemos los valores propios de λ1 = 2, y λ2 = λ3 = 1. Para hallar los vectores propios, debemosresolver el siguiente sistema de ecuaciones
(2− λ)x+ y + z = 0,−2x− λy − z = 0,
2x+ y + (2− λ)z = 0. (6.253)
Primer caso: λ1 = 2, tenemos el sistema
y + z = 0,−2x− 2y − z = 0,
2x+ y = 0. (6.254)
Las soluciones de este sistema, es decir, las componentes del vector propio V1, son
V1 =
1−22
. (6.255)

6.4. APLICACIONES 299
Entonces,
x(t) = e2t,
y(t) = −2e2t,
z(t) = 2e2t. (6.256)
es un asolucion particular del sistema (6.250).
Segundo caso: λ2 = λ3 = 1, debemos definir el numero de vectores propios linealmente indepen-dientes. Si λ1 = λ2 = 1, del sistema (6.253), tenemos la matriz 1 1 1
−2 −1 −12 1 1
. (6.257)
El orden de la matriz es 3 y el rango r = 2. Entonces, el numero de vectores propios linealmenteindependientes es igual a m = n − r = 1. Luego, la raız λ1 = 1 tiene multiplicidad k = 2 (es decir,se repite dos veces). Debido a que k > m, entonces, la solucion debemos buscarla como el productode un polinomio de orden k −m = 1 multiplicado por eλt, es decir, de la forma
x(t) = (a+ bt)et,
y(t) = (c+ dt)et,
z(t) = (f + gt)et. (6.258)
Para hallar los coeficientes a, b, c, d, f y g pongamos (6.258), en el sistema (6.250) e igualando loscoeficientes con terminos iguales, obtenemos el sistema
b+ d+ g = 0 b = a+ c+ f
−2b− d− g = 0 d = −2a− c− f
2b+ d+ g = 0 g = 2a+ c+ f. (6.259)
Hallemos las soluciones generales de este sistema. De las dos ecuaciones de la izquierda, tenemosb = 0, g = −d. Sustituyendo estos resultados en las otras ecuaciones, resulta
a+ c+ f = 0, d = −2a− c− f. (6.260)
Las otras ecuaciones son consecuencia de estas. Resolvemos el sistema (6.260), respecto a y f ;
a = −d, f = d− c. (6.261)
De esta manera, todas las incognitas se expresan a traves de c y d. Pongamos c = C1, d = C2,tenemos a = −C2, b = 0, f = C2 −C1, g = −C2. Hemos encontrado la solucion general del sistema.
Poniendo los valores encontrados de a, b, .., en (6.258), y tomando en cuenta la solucion (6.256),multiplicada por C3, obtenemos la solucion general del sistema (6.250), esta tiene la forma
x(t) = −C2et + C3e
2t,
y(t) = (C1 + C2t)et − 2C3e2t,
z(t) = (C2 − C1 − C2t)et + 2C3e2t. (6.262)
6.4. Aplicaciones
Ejemplo 1:

300 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Hemos visto que el movimiento libre sin amortiguamiento de un sistema masa-resorte se describepor la ecuacion diferencial
md2y
dt2= −ky. (6.263)
Supongamos ahora que tenemos un sistema con dos masas-resortes. Sean m1 y m2, las masas delos cuerpos, k1 y k2 las constantes de los resortes, figura 6.1.
Figura 6.1: Sistema masas-resortes.
En este caso, tenemos el siguiente sistema de ecuaciones acopladas
m1d2y1dt2
= −k1y1 + k2(y2 − y1),
m2d2y2dt2
= −k2(y2 − y1), (6.264)
donde y1(t) y y2(t) son los desplazamientos desconocidos de las masas m1 y m2, respectivamente.Las fuerzas que actuan sobre la primera masa dan la primer ecuacion y las fuerzas que actuan sobrela segunda masa nos dan la segunda ecuacion en (6.264).
Ejemplo 2:
Sea el sistema de la figura
Figura 6.2: Sistema de masas-resortes.
Solucion:

6.4. APLICACIONES 301
Las ecuaciones que describen el comportamiento del sistema son las siguientes
m1d2x1
dt2= −k1x1 − k3(x1 − x2), (6.265)
m2d2x2
dt2= −k2x2 − k3(x2 − x1) (6.266)
Supongamos las soluciones de la forma
x1 = α1eλt y x2 = α2e
λt. (6.267)
Para sustituir en (6.266) debemos calcular las derivadas, esto es
dx1
dt= α1λe
λt,d2x1
dt2= α1λ
2eλt,
dx2
dt= α2λe
λt,d2x2
dt2= α2λ
2eλt. (6.268)
Sustituyendo en (6.266), obtenemos
m1α1λ2eλt = −k1α1e
λt − k3(α1eλt − α2e
λt),m2α2λ
2eλt = −k2α2eλt − k3(α2e
λt − α2eλt). (6.269)
Eliminando la funcion exponencial, podemos escribir el sistema de la siguiente manera
(m1λ2 + k1 + k3)α1 − k3α2 = 0,
−k3α1 + (m2λ2 + k2 + k3)α2 = 0. (6.270)
Este mismo sistema lo podemos escribir en forma matricial, es decir, como (k1+k3
m1+ λ2
)− k3
m1
− k3m2
(k2+k3
m2+ λ2
) α1
α2
= 0. (6.271)
Para que este sistema tenga solucion no trivial es necesario que se cumpla la relacion
det
(k1+k3
m1+ λ2
)− k3
m1
− k3m2
(k2+k3
m2+ λ2
) = 0. (6.272)
Esto nos lleva a la siguiente ecuacion
(m1λ2 + k1 + k3)(m2λ
2 + k2 + k3)− k23 = 0. (6.273)
Esta es una ecuacion cuadratica respecto a λ2, y determina las frecuencias de las oscilaciones delsistema. Desarrollando los parentesis, resulta
m1m2λ4 + (m1k2 +m1k3 +m2k1 +m2k3)λ2 + k1k2 + k1k3 + k2k3 = 0. (6.274)
Esta ecuacion la podemos escribir como
Aλ4 +Bλ2 + C = 0. (6.275)
donde, hemos definido
A = m1m2, B = m1k2 +m1k3 +m2k1 +m2k3, C = k1k2 + k1k3 + k2k3. (6.276)

302 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Hagamos en (6.275) la sustitucionη = λ2, (6.277)
entonces, tenemosAη2 +Bη + C = 0. (6.278)
Las raıces de (6.277) son
η1,2 = − B
2A±√B2 − 4AC
2A. (6.279)
Regresando a la expresion (6.277), resulta
λ2 = η1,2 = − B
2A±√B2 − 4AC
2A. (6.280)
De donde, resulta
λ = ±
√− B
2A±√B2 − 4AC
2A. (6.281)
De donde obtenemos cuatro raıces, las cuales representaremos como λ1, λ2, λ3 y λ4.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 303
6.5. Problemas de Repaso delCapıtulo 6:
6.1.- Integrar los siguientes sistemas deecuaciones diferenciales
1. dxdt = 2x+ y,dydt = 3x+ 4y.
2. dxdt = −x+ 8y,dydt = x+ y.
3. dxdt = x− 3y,dydt = 3x+ y.
4. dxdt = 2y − 3x,dydt = y − 2x.
5. dxdt = x+ z − y,dydt = x+ y − z,dzdt = 2x− y.
6. dxdt = y + 1,dydt = x+ 1.
7. dxdt = 3− 2y,dydt = 2x− 2t.
8. dxdt = x− 2y,dydt = x+ 3y.
9. dxdt = −3x− y,dydt = x− y.
10. dxdt = −7x+ y,dydt = −5x− 2y.
11. dxdt = 2x− 9y,dydt = x+ 8y.
12. dxdt = y + z,dydt = 3x+ z,dzdt = 3x+ y.
13. dxdt = 3x− y,dydt = 4x− y.
14. dxdt = 5x+ 3y,dydt = −3x− y.
15. dxdt = 2x− y + z,dydt = x+ 2y − z,dzdt = x− y + 2z.
16. dxdt = y + z,dydt = 3x+ z,dzdt = 3x+ y.
17. dxdt = 8y,dydt = −2z,dzdt = 2x+ 8y − 2z.
18. dxdt = x cos t,dydt = et+e−t
2 y.
19. dxdt = 1
y ,dydt = 1
x .
20. dxdt = 4x− 5y,dydt = x, x(0) = 0, y(0) = 1.

304 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Soluciones a los Problemas de Repaso del Capıtulo 2:
2.2.-) (1) x2 + y2 = ln |cx2|.
(2) y3 = 3x(1− x) + c.
(3) xy = c(y − 1).
(4) y2 = c(1− x2).
(5) y + a = c senx.
(6) 10x+y = c10y − 1.
(7) y2 + 2 ln y = 2ex + c.
(8) y(x) = 1.
(9) cos y = ecx.
(10) ey = 2(y+1)x2+1 .
(11)(
ex+12
)3
tan y = 1.
(12) e(x−1)2 = ln (sen2 y) + 1.
(13) y3 = 3arctan ex + c.
(14) y5
5 + 3y2
2 = x3
3 + x+ c.
(15) 2x−y = 1− c2−y.
(16) 4√x+ 1 ln2 y = c ln2 y + 1.
(17) ln y =√x− 2.
(18)√
1 + x2 +√
1 + y2 = c.
(19) y2 = 1 + ln |(x3 + 1)3/2|.
(20) y sen y + cos y + x2 = c.
(21) y√a2 − x2 − x
√a2 − y2 = ca2.
(22) x2(y + 2)3 = 8y.
(23) 3 arctanx2 + 2 arctan y3 = c.
(24) x+ y − 2(√x−√y) + ln |(
√x+ 1)(
√y − 1)| = c.
(25) lnx−√y2 + 1 = c.
(26) y ln(x2 − 1) = cy + 1.
(27) y(x) = 14x
4 + 2 cosx+ 1.
(28) lnx = y(y + 1).
(29) y2 = ln c(x2 + 1).

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 305
(30) y(x) = −1 + cex+ x33 .
2.3.-) (1) cos yx = ln |cx|.
(2) x2 = c(x+ y).
(3) cy2 + xeyx = 0.
(4) x2(y − 2x) = cy.
(5) sec yx + tan y
x = cx.
(6) lnx2 + π4 = arctan y
2x .
(7) y2 = x2(lnx2 − c).
(8) x2 = c(√y − 2
√x)2.
(9) y ln y − x lnx = y + c.
(10) x2 = y2 ln cx.
(11) y = 2x ln cy.
(12) arc cos( yx ) = lnx+ c.
(13) sen( yx ) = x.
2.4.-) (1) 3x+ 2y + ln(x+ y − 1)2 = c.
(2) x(x+ y − 1)− y(y − 3) = c.
(3) (x+ 1)2 + 2(x+ 1)(y − 3)− (y − 3)2 + 8 = 0.
(4) x5(y2 − x3) = c(y2 + 4x3).
(5) 2√3
ln∣∣∣x−7y−9−4
√3(y+1)
x−7y−9+4√
3(y+1)
∣∣∣− ln (y + 1) = c.
(6) x = y2(c− lnx).
(7) x+ y = (x+ y) ln∣∣∣x+y
x+3
∣∣∣ + c.
(8) lnx3 = arc sen(
y2
x3
)+ c.
2.5.-) (1) 12x
2 + x sen y − cos y = c.
(2) 3x2y − y3 = c.
(3) xy + ex sen y = c.
(4) 4y lnx+ y4 = c.
(5) x2y + 2x sen y = c.
(6) 3x2 + 2(x2 − y)√x2 − y = c.
(7) x3 + 3xy2 + 3xy + 3ey = c.

306 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(8) x3 + x3 ln y − y2 = c.
(9) senx− yx = c.
(10) yex2+ x ln y = c.
(11) (x+ 1) sen y + (1− y) senx = c.
(12) xy + 12x
2 ln y + y = c.
(13) x3 + 3x sen y + 3y = c.
(14) 2yex + y2 = c.
(15) 2ex sen y + x2 + y2 = c.
(16) x3y − cosx− sen y = c.
(17) ex+y + x3 + y4 = c.
(18) yx + ln x
x + 1x = c.
(19) x senx+ y = cx.
(20) x− y2 = cy.
2.6.-) (1) y = x4 + cx2.
(2) y = (x2
2 + c)e−x2.
(3) y = 1−sen xcos x (x+ c).
(4) y = ex(lnx+ c).
(5) y = a(x−1)xn .
(6) y = (1 + x2)(x+ c).
(7) x = 12y
2 + cy3.
(8) xy = y2 ln y + c.
(9) y = x2
2 lnx.
(10) y = − cosx
(11) x = y2 + cy.
(12) y = cos 3x(1− 23 cos 3x).
(13) yx = cy3 − 1.
(14) x = y4
2 + cy2.
(15) y(x) = c√x2 − 1.
(16) x = cy − ln y − 1.
2.7.-) (1) (xy)−3 = ln(
1x3
)+ c.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 307
(2) y = (1 + x2)(arctan2 x+ c)2.
(3) x−1 = ln y + cy + 1.
(4) y13 (cx
23 − 3
7x3) = 1.
(5) y = x−1x+c .
(6) x√y = x tanx+ ln (cosx) + c.
(7) y4x3(ex + c) = 1.
(8) 4yex = (ex + 2)2.
(9) y(x3 + 1) cosx = 1.
(10) xy(y + c) = 1.
2.8.-) (1) x = p3 + p, y = 34p
4 + 12p
2 + c.
(2) x = 2pp2−1 , y = 2
p2−1 − ln(p2 − 1).
(3) x = p√p2 + 1, y = 1
3 (2p2 − 1)√p2 + 1 + c.
(4) x = 1p + ln p, y = p− ln p+ c.
(5) y = (p− 1)ep, x = ep + c.
(6) y = −p± p√p2 + 1, x = − ln p± (2
√p2 + 1− arctanh 1√
p2+1.
(7) y = 14 (x2 + 2xp− p2), x = c− p.
(8) y = xp− 1xp , x = 1
p√
2 ln p+c.
(9) x = y+p ln(yp)2p , y = p+ c.
(10) x = y(1−yp3)2p , y = c
p .
2.9.-) (1) x = 2c, y = c(x− c)
(2) x = 3p4+cp2 , y = 2(p4+c)
p .
(3) x = c2, y = c(x− c2
3 ).
(4) x = 1p , p = c, y = cx− ln c.
(5) x = cp2 , y = c(p+2)
p .
(6) x = ln p+c√p , y = −√p(ln p+ c) + 4
√p.
(7) x = 1, p = c, y = c− (2 + c) = −2.
(8) x = p2(2p−3)+2c2(p−1)2 , y = p4(2p−3)+2cp2
2(p−1)2 − 2p3.
(9) x = 1p3 , p = c, y = cx+ 1
2c2 .

308 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(10) x = p+cp2 , y = 2(p+c)
p − ln p.
2.10.-) (1) y = ce− sen x.
(2) y√x2 + 1 = 1
5x5 + 2
3x3 + x+ c.
(3) y(x) =√
1− x2(arcsenx+ c
).
(4) x = y√
1 + cy.
(5) y = − 12 + 3
2 ex2.
(6) cosx = 1 + 12 ln
(y2+1
2
).
(7) y(x) = 2x2+x4+34(x2+1)2 .
(8) y2 = 1 + 2 ln( ex+12 ).
(9) 2x+ y = 3 ln(x+ y + 1) + c.
(10) x2y2(c− x2) = 1.
(11) x2√y(y − 1) = c.
(12) ln[7y2 + 2y(x− 1)− 7(x− 1)2
]+ 2
√2
5 arctgh[√
25
(2x+7y−2
x−1
)2]= c.
(13) ax + a−y = c.
(14) y(x) = ce−x33 .
(15) x3 + y + 2 = cey.
(16) y = sin(x)(1+c x)x .
(17) x2 = y3/2(c− y5/2
5
).
(18) x = y(1 + cxex2).
(19) (x+ y)2 − 2y = c.
(20) x = 4(1− cos y) + ce− cos y.
(21) x+ 3y + c = ln(x− 2y).
(22) tan y = x2+4c2 ex2 .
(23) (x+ y − 1)e−2(x+1)x+y−1 = c.
(24) x+ yex/y = 1 + e.
(25) lnx+ y2
x = c.
(26) xy2 − 2x+ 1 = cxe−y2/2.
(27) y = x secx.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 309
(28) x3 − x2 − xy + y2 + y3 = c.
(29.) xy = x2 + c.
(30) ln[
ln 2y−1ln 2y
]= 2
√3− ln 2x+ c.
(31) 6amxbnx = ln(ambn)y(2y2 − 3y + 6)− 6 ln(ambn)(y + 1) + c.
(32)√x+ 1 = ln
∣∣∣√y(√x+1+1√y+1+1
)+ c.
(33) ln2(3) ln( 1−yy ) = 3x(x ln 3− 1)c.
(34) x+y1−xy = c.
(35) 12 (x2 − y2)− (x+ y) + ln
∣∣∣(1− y)(1 + x)∣∣∣ = c.
(36) lnx = arctan y + c.
(37)√
1− x2 +√
1− y2 = 1.
(38) lnx = arctan y + c.
(39) ax + a−y = c.
(40) 1 + ey = c(x2 + 1).
(41) y(x) = ln 2ex
1+ex = 1− e−y(y + 1).
(42) x+ 2tan( x−y
2 )−1= c.
(43) y2 + ln y2
x2+1 = c.
(44) arctan v = ln r + c.
(45) ex+y + cey + 1 = 0.
(46) 9y = (x3/2 + c)2.
(47) ln y = x(lnx− 1) + c.
(48) y(y − 2) = 2(ex − 2x) + c.
(49) sen v = cev.
(50) ey2−2t(1 + ce2t
)= 1.
(51) y(x) = a arctan(
x+ya
)+ c.
(52) ln(lnx) = c+ ey
y .
(53) 2x3y3 = 3a2x2 + 2c.
(54) ln(x2 + y2) + 2 arctan(y/x) = c.
(55) lnx = c+ cot(
ln√
yx
).
(56) lnx = 2√
yx + c.

310 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(57) (y − 2x)3 = c(y − x− 1)2.
(58) x− 2y + ln(2x+ y − 1) = c.
(59) 2x+ (x− y)(x− y − 4) = c.
(60) (x+ 2y − 2)(y − x+ 5)5 = c.
(61) 4 ln(x− 3)− 2 ln[
(y+2)(x+y−1)−(x−3)(x−y−5)(x−3)2
]+√
2 ln[
y+2+(1−√
2)(x−3)
y+2+(1+√
2)(x−3)
]= c.
(62) lnx+ x2
y−x2 + c = 0.
(63) cos(
y−2xx+1
)= 2c
x+1 .
(64) x2y4(2 lnx+ c) = 1.
(65) ln |2√y − x|+ xx−2
√y = c.
(66) 1− xy = cx3(xy + 2).
(67) lnx+ 2y√
x
√1− xy2 = 2c.
(68) x2y(ln y + c) = 1.
(69) y − 1− (2x+ 1) ln |2x+ 1| = c(2x+ 1).
(70) y(x) = senx+ c cosx.
(71) xy = c− lnx.
(72) ye−x2+ (x2 + 1)e−x2
= c.
(73) y(x) = c ln2 x− lnx.
(74) y(x) = 32
x2−2e−x(x2+2x−2)(x+ex) + c
ex+x .
(75) xey = e2y + c.
(76) y(x) = cex + 32e−x.
(77) y(x) = x+ (x2 + 1) arc tg x+ c.
(78) y(x) = x2+2x+3x+1 .
(79) y(x) = 2x3 + 5x2.
(80) y(x) = ce−x + x2 − 2x+ 2.
Soluciones a los Problemas de Repaso del Capıtulo 3:
3.1.-) (1) y(x) = 16x
4 + c1x+ c2.
(2) y(x) = − 1k3 cos kx+ c1
2 x2 + c2x+ c3.
(3) y(x) = 130x
6 + c1x+ c2.
(4) y(x) =(
x2
2 − x+ 1)
lnx+ c1x2 + c2x+ c3.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 311
(5) y(x) = xm+n∏ni=1 (m+i) +
∑ni=1
cixn−i
(n−i)! .
(6) y(x) = c1eax + c2e
−ax.
(7) y(x) = b(x− 1) lnx+ c1x+ c2.
(8) y(x) =(
x2
2 − x+ 1)
lnx− 14x
2 + c1x+ c2.
(9) y(x) = − 1k3 sen kx+ c1
2 x2 + c2x+ c3.
(10) y(x) = eax
a2+k2
(a cos kx+ k sen kx
).
3.2.-) (1) y2 = arctan2 x√c1−x
+ c2.
(2) y2 = y[ c1c2−3c1+e2c1(x+c2)
c1+ c2
c1(3c1 − e2c1(x+c2)).
(3) y(x) = ln(x2 + 2c1) + c2. (4) y(x) = e2x.
(5)√
2c1arctanh(√
22 yc1)− x− c2 = 0.
y(x) = c
(6) y(x) = ± 2(1+xc1)32
3c1 + c2.
(7) y(x) =
[eex+c2−c1
c2
].
(8) y(x) =
x(c1 − 2)− 4
3
√c1 − 1(x− 1)
32 + 1
2 x2 + c2
c2
x(c1 − 2) + 43
√c1 − 1(x− 1)
32 + 1
2 x2 + c2
. (9) y(x) =
e−1/2
c1−(ex+c2 )2
ex+c2
e−1/2
c1−(e−x−c2 )2
e−x−c2
.
(10) y(x) =
−−ec1 (x+c2 )+c1−1
1
c2
.3.3.-) (1) y(x) = c1e
2x + c2e−x.
(2) y(x) = (c1 + c2x)e2x.
(3) y(x) = c1 + c2e4x.
(4) y(x) = c1e2x + c2e
− 43 x.
(5) y(x) = c1 e(12−
i2 )√
2ax + c2 e(12+ i
2 )√
2ax + c3 e(−12+ i
2 )√
2ax + c4 e(−12−
i2 )√
2ax.
(6) y(x) = senx+ 1√3
cosx.
(7) y(x) = 4e−3x − 3e−2x.
(8) y(x) = ex[c1 cos(x2 ) + c2 sen(x
2 )].
(9) y(x) = 4ex + 2e3x.
(10) y(x) = (x+ 2)e−x2 .

312 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(11) y(x) = (c1 + c2x)e−x + c3e2x.
(12) y(x) = (x+ 1)ex.
3.4.-) (1) y(x) = c1 cosx+ c2 senx+ 2(x− 1)ex.
(2) y(x) = c1ex + c2e
−x + xex + x2 + 2.
(3) y(x) = c1ex + c2e
2x + 0, 1 senx+ 0, 3 cosx.
(4) y(x) = c1 cosx+ c2 senx− 2x cosx.
(5) y(x) = senx+ ex.
(6) y(x) = −(2x2 − 2x+ 3)e2x + c1ex + c2e
4x.
(7) y(x) = − 13e
x + 13 cosh 2x+ 1
6 senh 2x.
(8) y(x) = 18
(e5x + 22e3x + ex
).
(9) y(x) = c1e−x + c2e
3x + 15e
4x.
(10) y(x) = c1ex + c2e
−2x + e4x
18
(x2 − x+ 7
18
).
(11) y(x) = c1e6x + c2e
x + 174 (5 senx+ 7 cosx).
(12) y(x) = [ 37a2
2a+x+9xa2
1+18a2+81a4 + c3]e−xa + c1 cos 3x+ c2 sen 3x.
(13) y(x) = 15 + ( 1
4x sen 2x+ c1 sen 2x+ c2 cos 2x)ex.
(14) y(x) = c1ex + c2e
−4x − x5 e−4x −
(x6 + 1
36
)e−x.
(15) y(x) = c1ex + c2e
−3x +(
x3
12 −x2
16 + x32
)ex.
(16) y(x) = e2x(c1 cos 2x+ c2 sen 2x
)+ 0, 25e2x + 0, 1 cos 2x+ 0, 05 sen 2x.
(17) y(x) = c1e3x + c2e
−3x + 137
(− cosx+ 6 senx
)e3x.
(18) y(x) = (c1 + c2x+ x3)ex.
(19) y(x) =(c1 − x2
4
)cosx+
(c2 + x
4
)senx.
(20) y(x) = (c1 + c2x)e−2x +(
x16 −
132
)e2x.
(21) y(x) = c1 + c2e5x − 0, 2x3 − 0, 12x2 − 0, 048x+ 0, 02(cos 5x− sen 5x).
(22) y(x) = 14 (2x2 − 2x+ 3)− 1
58 (7 cos 3x− 3 sen 3x) + 14e
x + (c1 cos√
72 x+2 sen
√7
2 x)e− x
2 .
(23) y(x) = c1e−x + c2xe
−x + 43x
3e−x.
(24) y(x) = (c1 cosx+ c2 senx− x2 cosx+ x senx)e2x.
(25) y(x) = e2x − e3x + xe−x.
(26) y(x) = 15 + 1
17 e2 x + (c1 cosx+ c2 senx)e−2 x.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 313
(27) y(x) = c1e−x + c2xe
−x + x2
2 e−x − 1
2 cosx.
(28) y(x) = 113500e
−3x(450x2 + 1230x+ 871) + c1e2x + c2e
3x.
(29) y(x) = c1e−2x + c2e
−x + 125.
(30) y(x) = c1 + c2e3x − x2
6 −x9 .
(31) y(x) = x2 (ex − e2x cosx) + 2ex + (c2 cosx+ c1 senx)e2x.
(32) y(x) = (c1 + c2x)e−x + 12x
2e−x.
(33)y(x) = 15 + (c1 sen
√6x+ c2 cos
√6x)e2x.
(34) y(x) = ( 14x
2 + c2) cosx+ ( 16x
3 − 14x+ c1) senx.
(35) y(x) = (x2 − 2x+ 32 + c1 + c3x)ex + (x2 + 2x+ 3
2 + c2 + c4x)e−x + cosx+ senx.
(36) y(x) = x3 + 3x2 − 6 + (c1sen√
32 x+ c2cos
√3
2 x)ex2 .
(37) y(x) = − 117e
3x + (c1 cos√
152 x+ c2 sen
√152 x)e−
52 x.
(38) y(x) = −e2x + 12e
x + 12e
3x.
(39)y(x) = 16 + 1
3e−x − ( 1
2 cos√
2x+√
23 sen
√2x)e−2x.
(40) y(x) = c1 cos 2x+ c2 sen 2x+ 4x.
3.5.-) (1) y(x) = c1 cos 2x+ c2 sen 2x+ 14 cos 2x ln | cos 2x|+ x
2 sen 2x.
(2) y(x) = (c1 − x)e−x cosx+ (c2 + ln senx)e−x senx.
(3) y(x) = (x+ c1)ex − (ex + 1) ln(ex + 1) + c2.
(4) y(x) = c1 cosx+ c2 senx+ 1√2
cosx ln∣∣∣ cosx+
√cos2 x− 1
2
∣∣∣ + 1√2
senx arc sen(√
2 senx).
(5) y(x) = c1ex + c2xe
x + xex ln |x|.
(6) y(x) = c2 + c1ex + (ex + 1) ln
(ex+1
ex
).
(7) y(x) = c1ex + c2xe
x − ex ln√x2 + 1 + xex arctanx.
(8) y(x) = 12
(arc sen ex + ex
√1− e2x + c1
)ex + 1
3 (1− e2x)3/2 + c2.
(9) y(x) = c1ex + c2e
−x − 1− xe−x + (ex − e−x) ln(1− e−x).
(10) y(x) = c1e−2x + c2e
−3x + 12e−2x ln
(e2x + 1
)− e−2x + e−3x arctan ex.
(11) y(x) = c1e−x + c2e
−2x + (e−x + e−2x) ln(ex + 1).
(12) y(x) = (c1 + ln | senx|) senx+ (c2 − x) cosx.
(13) y(x) = c1e−x + c2xe
−x + 45e−x(x+ 1)5/2.
3.6.-) (1) y(x) = c1x+ c2x lnx+ x ln2 x.
(2) y(x) = c1 cos lnx+ c2 sen lnx+ x2 (7− lnx).

314 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(3) y(x) = c1x−1 + c2x
−1 lnx.
(4) y(x) = c1 + c2 lnx.
(5) y(x) = c1x+ c2x lnx.
(6) y(x) = c1x−1 + c2x
3 + x−1 lnx+ 2x−1 ln2 x.
(7) y(x) = c1 + c2 lnx+ c3x3.
(8) y(x) = c1x+ c2x lnx+ x3.
(9) y(x) = c1 cos 2 lnx+ c2 sen 2 lnx+ 2x.
(10) y(x) = c1x2 + c2x
−1 − 23x
−1 lnx− x−1 ln2 x.
(11) y(x) = x2(c1 cos lnx+ c2 sen lnx
)+ 3x2.
(12) y(x) = c1x3 + c2x
−2 + x3 lnx− 2x2.
(13) y(x) = c1x2 + c2x
−1 + 0, 1 cos lnx− 0, 3 sen lnx.
(14) y(x) = (x− 2)2(c1 + c2 ln |x− 2|) + x− 32 .
(15) y(x) = c1
(x+ 3
2
)+ c2
(x+ 3
2
)3/2
+ c3
(x+ 3
2
)1/2
.
3.7.-) (1) y(x) = 13 (x− 1)ex + (2x+ 3)e−x + (c1 sen
√3
2 x+ c2 cos√
32 x)e
−x/2.
(2) y(x) = (1 + x+ x2e−2x + c1 senx+ c2 cosx)ex.
(3) y(x) = (x2 − 2 + c1) cos x2 + (c2 − 3x) sen x
2 .
(4) y(x) = c1x−2 + c2x
−4.
(5) y(x) = c1x+ c2x−3.
(6) y(x) = (c1 − x− 1)ex + (c2 − 1 + x− 2x2)e2x.
(7) y(x) = c1e−x + c2e
−2x + cosx+ 2 senx.
(8) y(x) = (senx− x cosx)ex + (c1 cos√
32 x+ c2 sen
√3
2 x)ex2 .
(9) y(x) = 2(2x2 − 4x− 1) senx+ 2(5x− 7) cosx+ (c1x+ c2)e−x.
(10) y(x) = c1ex + c2e
2x + ex(1− ex) ln∣∣∣ e−x
1+e−x
∣∣∣.(11) y(x) = c1e
x + c2e−x − ex ln
∣∣∣ ex
ex−e−x
∣∣∣ + e−x ln∣∣∣ e−x
ex−e−x
∣∣∣.(12) y(x) = ( 8
5x7/2 + c1 +2 x)ex.
(13) y(x) = c1ex + c2e
5x +(1− x
4
)e−3x.
(14) y(x) = c1ex + c2e
2x +(x− 1
4
)e3x.
(15) y(x) = c1e−x + c2e
5x + 136e
−x(18x2 + 6x+ 1).
(16) y(x) = x−1/3(c1 + c2 lnx
).

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 315
(17) y(x) = (c1 lnx+ c2)x2.
(18) y(x) =(c1 + c2 lnx
)x−1.
(19) y(x) = c1ex + c2e
−x +(
x2 −
14
)ex.
(20) y(x) = c1e−x + c2e
2x − 13 (x+ 1)e−x.
(21) y(x) = c1x+ c2x2 + x2(lnx− 1).
(22) y(x) = (c1 + c2x)e2x − (lnx+ 1)e2x.
(23) y(x) = x2( 16 ln3 x+ c1 + c2 lnx).
(24) y(x) = [2(1−coshx) lnx+∑∞
n=1(−1)n+1
n(n!) xn] coshx+[2 senhx lnx+∑∞
n=1(−1)n−1
n(n!) xn] senhx+c1 coshx+ c2 senhx.
(25) y(x) = − 14 (2x2 + 2x+ 3) + c1e
x + c2e−2x.
(26) y(x) = −x+∑∞
n=2xn
(n2−2)(n−1)! .
(27) y(x) = 152 (5 senx− cosx)e−x + (c2 cos
√3x+ c3 sen
√3x)ex + c1e
−2x.
(28) y(x) = [−∑∞
n=1(4 x)n
n·n! − 1 + (4x− 1) lnx+∑∞
n=2(4 x)n
(n−1)·n! + c1 + c2 x]e−2x.
(29) y(x) = (2x− 23 + c1)ex + c2e
−2x.
(30) y(x) = 13x
2 + c1(x− 1x ) + c2(x+ 1
x ).
(31) y(x) = −3− 2x− 2x2 + c1ex + c2e
−2x.
(32) y(x) = 154 + 5
2x+ 12x
2 + c1ex + c2e
2x.
(33) y(x) = 29 + ( 1
36 + c1 + c2x)e−3x.
(34) y(x) = 74x− x2 + 1
3x3 + c1 + c2e
−x + c3e−4x.
(35) y(x) = c1 sen(2 lnx) + c2 cos(2 lnx).
(36) y(x) = (1 + c2x) lnx+ 2 + c1x.
(37) y(x) = −( 13 + 1
3x+ 15x
2) + c1x3 + c2√
x.
(38) y(x) = c1x−1 + c2(x− 1)4.
(39) y(x) = signum(ln(x))∞signum(x) .
(40) y(x) = 12 + 671
137 e2 x sen(x)− 244
137 e2 x cos(x) + 351
274 cos(2√
2x) + 365√
2548 sen(2
√2x).
(41) y(x) = 18 cos(x)− 1
36 cos(3x)− 16x sen(3x) + c1 cos(3x) + c2 sen(3x).
(42) y(x) = c1 sen x+c2 cos xx .
(43) y(x) = c1 + c2x+ (c3 + c4x)ex.
(44) y(x) = c1 cosx+ c2 senx+ c3 sen(2x) + c4 cos(2x).

316 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
Soluciones a los Problemas de Repaso del Capıtulo 4:
4.1.-) (1) F (s) = 120s6 .
(2) F (s) = 6s4 + 6
s3 + 3s2 + 1
s .
(3) F (s) = 2s3 + 6
s2 − 3s .
(4) F (s) = 2(s−3)3 .
(5) F (s) = 8s(s2−4) .
(6) F (s) = 1s + 2
s−2 + 1s−4 .
(7) F (s) = dds [ s
s2+1 ] = s2−1(s2+1)2 .
(8) F (s) = 1(s+1)2+1 .
(9) F (s) = s−1(s−1)2+1 .
(10) F (s) = 2s2+16 .
(11) F (s) = s4+2s2+8s2(s2+4)2 .
(12) F (s) = 1s (1− e−4s + e−5s).
(13) F (s) = 2e−s
s3 .
(14) F (s) = 2s (1− e−2s − e−3s).
(15) F (s) = 1s2 − e−2s
s2 − 2e−2s
s .
(16) F (s) = 1−e−2πs
s2+1 .
(17) F (s) = − 1s + 2e−s
s .
(18) F (s) = 1−se−s
s2 .
(19) F (s) = 2s2 − 1
s .
(20) F (s) = 1s2 − 1
s −(
1s2 − 5
s
)e−2s.
4.2.-) (1) f(t) = (1 + 2t+ 32 t
2)u(t).
(2) f(t) = (1 + cos 2t)u(t).
(3) f(t) = (1− 12 t
2)u(t).
(4) f(t) = ( 45e−2t − 1
2e−t − 3
10 cos t+ 1110 sen t)u(t).
(5) f(t) = 813e
2t − e−t[
813 cos 2t− 15
16 sen 2t]u(t).
(6) f(t) = 35 cos 2t+ 1
5 sen 2t− 35 cos 3t+ 2
5 sen 3t)u(t)
(7) f(t) = 12 t
3e7t.
(8) f(t) = 23 sen 3t.

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 317
(9) f(t) = 2e2t cos 3t.
(10) f(t) = t cos t u(t).
(11) f(t) = 14e−2t sen 4t u(t).
(12) f(t) = 13 (e6t − 1)u(t).
(13) f(t) = (2 cos 3t+ 13 sen 3t)u(t).
(14) f(t) = ( 72e
t − 12e−t)u(t).
(15) f(t) = e−(t−3) cos(t− 3)u(t− 3).
(16) f(t) = e−t(cos t+ sen t)u(t)
(17) f(t) = (cos 4t+ 2e3t + t+ 12 t
2)u(t).
(18) f(t) = (t− 1)u(t− 1) + (t− 2)u(t− 2).
(19) f(t) = (2 + t)u(t) + (2 t2 − 9 t+ 10)u(t− 2) + (t− 3)u(t− 4).
(20) f(t) = (1 + 4t)u(t) + [4− 12 (t− 3)2]u(t− 3) + u(t− 2).
4.3.-) (1) y(t) = 12 t
2 u(t).
(2) y(t) = t(1− 12 t)u(t).
(3) y(x) = 14xe
−x(x+ 1)− 17√
312 sen
√3x+ cos
√3x.
(4) − 12x cosx+ 3
2 senx.
(5) y(t) = t(3− t)u(t).
(6) y(t) = 16 t
2(3− t)u(t).
(7) y(t) = t2( 32 −
13 t)u(t).
(8) y(t) = t2( 32 + 1
3 t)u(t).
(9) y(t) = (−e2t + 52e
t + 12e
5t)u(t).
(10) y(t) = [−8 e−2 t +(2− 8
√5
5
)e
12 (−3+
√5)t + 2
5
(4 +
√5)√
5e−12 (3+
√5)t]u(t).
(11) y(t) = 12 [1− e−t(7 cos t+ 5 sen t)]u(t).
(12) y(t) = 12 t(t+ 10)etu(t).
(13) y(t) = [ 1169 (t+ 6)et + 1
338 (5 sen(2 t)− 12 cos(2 t))e4 t]u(t).
(14) y(t) = 5 [4 e−2(t−π) − cos√
2(t− π) + sen√
2(t− π)]e2(t−π)u(t− π).
(15) y(t) = (1+ 124 t
4)u(t)+(− 124 t
4− 13 t
3+ 14 t
2+ 23 t−
1324 )u(t−1)+( 1
3 t3− 7
2 t2+10 t− 26
3 )u(t−2).
(16) y(t) = (1/2u(t− 2π)− 1/2u(t− 3π)) t + 3/2 e−t cos(t) + 1/2 e−t sen(t) + 1/2 − π u(t −2π)e−t+2 π cos(t)−π u(t−2π)e−t+2 π sen(t)−u(t−2π)+u(t−2π)e−t+2 π cos(t)+1/2u(t−2π)e−t+2 π sen(t)+1/2u(t−3π)e−t+3 π cos(t)+3/2 e−3 ππ+3/2u(t−3π)π+1/2u(t−3π)−1/2 e−3 π+1/2 cos(t)e−3 π−t−3/2π cos(t)e−3 π−t − 3/2π sen(t)e−3 π−t + 1/2 sen(t)e−3 π−t.
(17) y(t) = 3[(1− cos t)u(t)− (1 + cos t)u(t− π)]

318 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES
(18) y(t) = cos t+ 6 sen2 12 t+ 2[t− 4− sen(t− 4)]u(t− 4).
(19) y(t) = −[2u(t) + u(t− 1)]t− 32 (5 + e2t)u(t) + 1
2 (1 + e2(t−1))u(t− 1).
(20) y(t) = 16 (3et + 13e−t + 2e2t)u(t)− 1
6 (2e−4e−2(t−4) − 3e4et−4 + e−4e−(t−4) + 6)u(t− 4).
(21) y(t) = (−7et + 4e2t)u(t) + 12 (1− 2et−1 + e2(t−1))u(t− 1)− (1− 2et−2 + e2(t−2))u(t− 2).
(22) y(t) = ( 163 e
t− 3112e
4t+ 14 )u(t)+(− 1
2 + 23e
t−1− 16e
4(t−1))u(t−1)+( 14−
13e
t−2+ 112e
4(t−2))u(t−2).
(23) y(t) = − 15 (e−5t − e−t − 1)u(t) + (−1/5− 1
4e−(t−2) + 9
20e−5(t−2))u(t− 2).
(24) y(t) = − 15 [u(t)−u(t−1)]t2− 2
25 [u(t)+u(t−1)]t− 2125 [1−e5t]u(t)+ 1
125 [17−2e5(t−1)]u(t−1).
(25) q(t) = 110 [1 − e−10t(cos(10t) + sen(10t))]u(t) − 1
10 (1 − e−10(t−5)(cos 10(t − 5) + sen 10(t −5))]u(t− 5).
Soluciones a los Problemas de Repaso del Capıtulo 5
5.1.-) (1) y(x) = 1 + x+ 32!x
2 + 173! x
3 + · · · . (2) y(x) = 12!x
2 + 125! x
5 + · · · . (3) y(x) = 1 + x+32!x
2+ 83!x
3+ 344! x
4+· · · (4) y(x) = x− 12!x
2− 16x
3+ 524x
4+· · · (5) y(x) = 1+x+x2+ 83!x
3+ 284! x
4+· · ·
5.2.-) (1) y(x) = a0(1 − 12x
2 + 12·4x
4 − 12·4·6x
6 + · · ·) + a1(x − 13x
3 + 13·5x
5 − 13·5·7x
7 + · · ·).(2) y(x) = a0(1 − 1
3!x3 + 4
6!x6 − 4·7
9! x9 + + · · ·) + a1(x − 2
4!x4 + 2·5
7! x7 − 2·5·8
10! x10 + · · ·). (3)
y(x) = a0(1 − 12x
2 − 34!x
4 − 3·76! x
6 − 3·7·118! x8 − · · ·) + a1(x + 1
3!x3 + 5
5!x5 + 5·9
7! x7 + + · · ·). (4)
y(x) = a0(1− 12·3x
3 + 42·3·5·6x
6 − 4·72·3·5·6·8·9x
9 + · · ·) + a1(x− 12·3x
4 + 52·3·6·7x
7 − 5·82·3·6·7·9·10x
10 + · · ·)(5) y(x) = a0(1− 1
3·4x4 + 1
3·4·7·8x8−+ · · ·) + a1(x− 1
4·5x5 + 1
4·5·8·9x9− · · ·). (6) y(x) = a0(1−x2 +
12x
4− 13!x
6 + · · ·)+a1(x− 23x
3 + 22
3·5x5− 23
3·5·7x7 + 24
3·5·7·9x9−· · ·). (7) y(x) = a0 +a1(x+ 1
3x3 + 1
4x4 +
15x
5 + 17x
7 + · · ·) (8) y(x) = a0(1 + 14x
2 − 796x
4 + 1615760x
6 − 108192160x
8 + · · ·) + a1(x− 16x
3 + 7120x
5 −17720x
7 + 52751840x
9 − · · ·). (9) y(x) = a0(1 + x3
6 + x6
180 + x9
12960 + · · ·) + a1(x+ x4
12 + x7
504 + x10
45360 + · · ·)(10) y(x) = a0(1− x2
2 + x4
8 −7x6
240 + 11x8
1920 −11x10
11520 − · · ·) + a1(x− x3
6 + x5
24 −x7
112 + 13x9
8064 − · · ·).
5.3.-) (1) y(x) = c1J1/3(x) + c2J−1/3(x). (2) y(x) = c1J3/2(5x) + c2J−3/2(5x). (3) y(x) =c1J2/3 + c2J−2/3. (4) y(x) = c1J2(x) + c2Y2(x). (5) y(x) = c1J0(
√x) + c1Y0(
√x).
Soluciones a los Problemas de Repaso del Capıtulo 6
6.1.-) (1) x(t) = c1et + c2e
5t, y(t) = −c1et + 3c2e5t. (2) x(t) = 2c1e3t − 4c2e−3t, y(t) =c1e
3t + c2e−3t. (3) x(t) = et(c1 cos 3t + c2 sen 3t), y(t) = et(c1 sen 3t − c2 cos 3t). (4) x(t) =
(c1 + 2c2t)e−t, y(t) = (c1 + c2 + 2c2t)e−t. (5) x(t) = c1et + c2e
2t + c3e−t, y(t) = c1e
t −3c3e−t, z(t) = c1e
t + c2e2t − 5c3e−t. (6) x(t) = c1e
t + c2e−t − 1, y(t) = c1e
t − c2e−t − 1.
(7) x(t) = c1 cos 2t + c2 sen 2t + t, y(t) = c1 sen 2t + c2 cos 2t − 1. (8) x(t) = (c1 − c2)e2t cos t −(c1 + c2)e2t sen t, y(t) = (c1 sen t + c2 cos t)e2t. (9) x(t) = (1 − 2t)e−2t, y(t) = (1 + 2t)e−2t.
(10) x(t) = (c1 cos t+ c2 sen t)e−6t, y(t) =[(c1 + c2) cos t− (c1 − c2) sen t sen t
]e−6t. (11) x(t) =
(c1 − 3c1t− 3c2)e5t, y(t) = (c1t+ c2)e5t. (12) x(t) = (c1e3t + c2e−2t, y(t) = 3
2c1e3t − c2e
−2t +c3e
−t, z(t) = 32c1e
3t − c2e−3t − c3e
−t. (13) x(t) = (c1 + c2t)et, y(t) = (2c1 − c2 + 2c2t)et.(14) x(t) = (c1 + 3c2t)e2t, y(t) = (c2 − c1 − 3c2t)e2t. (15) x(t) = c2e
2t + c3e3t, y(t) = c1e
t +c2e
2t, z(t) = c1et + c2e
2t. (16) x(t) = c1e3t + c2e
−2t, y(t) = 32c1e
3t − c2e−2t + c3e
−t, z(t) =

6.5. PROBLEMAS DE REPASO DEL CAPITULO 6: 319
32c1e
3t − c2e−3t − c3e
−t. (17) x(t) = c1e−2t + c2 sen 4t + c3 cos 4t, y(t) = − c1
4 e−2t + c2
2 cos 4t −c32 sen 4t, z(t) = − c1
2 e−2t + c2 sen 4t + c3 cos 4t. (18) x(t) = c1e
sen t, y(t) = c2esenh t. (19)
x(t) =√
2t+c2c1
, y(t) =√c1(2t+ c2). (20) x(t) = −5e2t sen t, y(t) = (cos t− 2 sen t)e2t.

320 CAPITULO 6. SISTEMAS DE ECUACIONES DIFERENCIALES

Bibliografıa
[1] A.F. Filipov, Problemario de Ecuaciones Diferenciales. Edit. Nauka, 1992.
[2] Dennis G. Zill, Michael. R. Cullen, Ecuaciones Diferenciales con Problemas de Valores en laFrontera. Edit. Thompson and Learning, 2002.
[3] Claudio Pita, Ecuaciones Diferenciales, Una Introduccion con Aplicaciones. Edit. Limusa, Nor-iega Editores, 1993.
[4] A. Kisiliov, M. Krasnov, G. Makarenko, Problemas de Ecuaciones Diferenciales Ordinarias.Edit. Mir, 1973.
[5] Edwards/Penney, Ecuaciones Diferenciales Elementales, con Aplicaciones. Prentice Hall His-panoamericana, 1986.
[6] Daniel A. Marcus, Ecuaciones Diferenciales. Brown Publishers, 1999.
[7] William Trench, Ecuaciones Diferenciales con Problemas de Valores en la Frontera. ThompsonLearning, 2002.
321

Indice alfabetico
amplitudde las oscilacion, 166
campo de direcciones, 81capacitor, 64carga
del estado permanente, 171conjunto
fundamental de soluciones, 292constante
capacitiva, 68inductiva, 66
corrientede estado permanente, 171electrica, 64transitoria, 171
ecuacioncaracterıstica, 137, 286de recurrencia, 240indicial, 255
ecuacion diferencial, 9con coeficientes constantes, 138con variables separables, 21cuasi-homogeneas, 36de Bernoulli, 46de Bessel, 256de Cauchy-Euler, 153de Clairaut, 77de Hermite, 248de Lagrange, 77de Legendre, 250de orden superior, 121, 122de orden superior reducible a primer or-
den, 123de Riccati, 50en derivadas parciales, 9especial de Riccati, 51exacta, 55grado, 10homogenea, 26, 27, 29lineal, 10
lineal de primer orden, 40lineal de primer orden no homogenea, for-
ma estandar, 40lineal homogenea, 10, 129lineal homogenea con coeficientes constantes,
137lineal no homogenea, 10, 129lineal no homogenea con coeficientes con-
stantes, 142no resuelta respecto a la derivada, 73orden, 10ordinaria, 9reducible a homogenea, 33reducible a lineal, 46, 49reducible a Separables, 24resuelta respecto a la derivada, 73
exponentede crecimiento, 181
formulade Euler, 141de recurrencia, 241de Rodrigues, 253
frecuencianeper, 180propia, 166real, 180
fuerzaelectromotriz, 168electromtriz, 64impulsiva, 221restauradora, 163
funciondelta de Dirac, 222Gamma, 184
funcionescontinuas por partes, 181de Bessel, 256de Bessel de orden cero, 258de Bessel de orden uno, 258de Bessel de segunda clase, 264de Bessel tercera clase, 266
322

INDICE ALFABETICO 323
de excitacion, 270de Hankel, 266de Newmann, 265de orden exponencial, 181escalon, 205homogeneas, 26linealmente dependientes, 131linealmente independientes, 131objeto, 181racionales, 196
imagen, 181inductancia, 64inductor, 64integral
converge, 180diverge, 180general, 122particular, 20, 122
integralescurvas, 20, 122
isoclinas, 81nulas, 81
leyde accion de masa, 87de enfriamiento, 62de Hooke, 163de Kirchhoff, 86de Newton, 86de Torricelli, 86Kirchhoff, 65
metodocoeficientes indeterminados, 143combinaciones integrables, 278de eliminacion, 271de Frobenius, 255de Laplace para ecuaciones diferenciales,
199factor integrante, 44, 59variacion del parametro, 41, 148
matrizde coeficientes, 270
movimientoamortiguado, 165armonico simple, 166forzado, 165libre, 165libre no amortiguado, 165no amortiguado, 165
oscilacioncrıticamente amortiguada, 171libre, 170sobreamortiguada, 170subamortiguada, 170
polinomiosde Hermite, 249de Legendre, 252
Presion Atmosferica, 70problema
de Cauchy, 18, 121de valor inicial, 270
puntoordinario, 242singular, 242
reaccionbimolecular, 87unimolecular, 87
resistencia, 64resistor, 64
seriecentro, 233coeficientes de la, 233converge, 234de potencias, 233de Taylor, 237derivadas termino a termino, 237Desplazando el ındice en la sumatoria, 236diverge, 234intervalo de convergencia, 235Multiplicacion de Series, 236Multiplicacion por una constante, 235radio de convergencia, 235residuo, 234suma de, 236
sistemalineal, 269normal, 269
sistema de ecuaciones diferenciales, 269lineal, 269lineales con coeficientes constantes, 293
soluciono integral de la ecuacion diferencial, 11particular, 20singular, 11general, 19, 122implıcita, 19n-parametrica, 11particular, 11, 122

324 INDICE ALFABETICO
transitoria, 171vector, 270
tablade transformadas directas, 193de transformadas inversas, 196
teoremasegundo de desplazamiento, 207de convolucion, 225dependencia lineal de las funciones de Bessel,
260desplazamiento en la frecuencia, 189diferenciacion de la transformada de Laplace,
210ecuacion diferencial exacta, 56existencia y unicidad, 17existencia y unicidad, 121integracion de la transformada de Laplace,
212transformada
de Laplace, 179, 180de Laplace para funciones continuas por
partes, 205de las derivadas, 193inversa de Laplace, 194lineal, 181
trayectorias ortogonales, 82
valor propio, 286vector propio, 286vectores
linealmente dependientes, 291linealmente independientes, 291
velocidadde escape, 175
Wronskiano, 131