Embed Size (px)
Citation preview

Ecole d’Eté 2014
Ecole d’Eté 2014
Altimétrie spatiale
Traitement de la mesure : des formes d’onde
au bilan de performance système
N. Picot / CNES Toulouse
Ecole d’Eté 2014, Saint-Pierre d’Oléron, 1-5 septembre 2014 1

Ecole d’Eté 2014 2
Traitement de la mesure : des formes d’onde au bilan de performance
système
• ….De la forme d’onde …

Ecole d’Eté 2014 3
OGDR
3 hours
IGDR
1 to 1.5 days
GDR
40 days
GOALS
Altimeter noise 1.7 (a)(c)(d) 1.7 (b)(c)(d) 1.7 (b)(c)(d) 1.5 (b)(c)(d)
Ionosphere 1 (e)(d) 0.5 (e)(d) 0.5 (e)(d) 0.5 (e)(d)
Sea State Bias 3.5 2 2 1
Dry troposphere 1 0.7 0.7 0.7
Wet Troposphere 1.2 1.2 1.2 1
Altimeter range
RSS
4.5 3 3 2.25
RMS Orbit
(Radial component)
6.8 (h) 2.5 1.5 1
Total RSS sea surface
height
11.2 3.9 3.4 2.5
Significant wave
height
10% or 0.5 m (i) 10% or 0.4 m (i) 10% or 0.4 m (i) 5% or 0.25 m (i)
Wind speed 1.6 m/s 1.5 m/s 1.5 m/s 1.5 m/s
Sigma naught
(absolute)
0.7 dB 0.7 dB 0.7 dB 0.5 dB
System drift 1mm/year (j)
Table 6 : JASON-3 ERROR BUDGET (in centimeters)(for 1 sec average, 2 meters SWH, 11 dB sigma naught)
• A la performance système :

Ecole d’Eté 2014 4
Traitement de la mesure : des formes d’onde
• Elément essentiel du système altimétrique : mais un des
contributeurs parmi d’autres
• Très variable selon les différentes surfaces survolées :
– L’altimètre fonctionne en continu et fournit une intégrale de l’énergie très
dépendante de la nature du terrain – topographie mais aussi rugosité.
– Information discrète avec une résolution spatiale (distance) relativement faible
(environ 45 cms) par rapport aux attentes des utilisateurs (1.5 cms)
– Des évolutions technologiques récentes : le mode SAR (Altimètrie Doppler Along
track)
– Ne couvre pas la future mission SWOT (interférométrie)
• au bilan de performance système :
– Fortement dépendant des applications concernées,
– Actuellement principalement sur les surfaces ‘océaniques’ : traduit la précision de
détermination de la hauteur de mer et la stabilité temporelle requise pour les
applications de type ‘Niveau de la mer’.
– Dépendant de nombreuses méthodes élaborées de traitement, de moyens de
validation et de comparaison
– Et bien sur d’équipes en charge des ‘opérations-traitements-validations-évolutions-
User_services- …. ‘, de scientifiques associés au projet, …

Ecole d’Eté 2014
• Quelques mots sur la circulation :
La topographie signature des
courants géostrophiques
• Quelques mots sur les
exigences/attentes des utilisateurs
• Le système altimétrique et les
techniques de traitement
• L’observation obtenue avec une
mission : le besoin de
combinaison.

Ecole d’Eté 2014
The Ocean is moving all around
An exemple: The Gulf Stream travels at ~ 4 km/hourtransports ~ 80 millions tonnes/second
Why decoding the Ocean?

Ecole d’Eté 2014
7
Sea surface topography reveals ocean circulation Ocean Topography as seen from space by TOPEX-POSEIDON (or any other altimetric mission)
Sea surface topography reveals ocean circulation Ocean Topography as seen from space by TOPEX-POSEIDON (or any other altimetric mission)
Sea surface topography reveals ocean circulation : the geostrophic equilibrium

Ecole d’Eté 2014
8
A simple model: the geostrophic equilibrium
•Main long wavelength ocean currents are geostrophic currents:
•Coriolis force balanced by gradient of the horizontal pressure force due to the slope of the sea surface (geostrophic equilibrium)
•always perpendicular to the pressure gradient•Currents are deduced from the maps of Sea Level Anomaly
•Generation of geostrophic currents on an oceanic bump in the northern hemisphere
Coriolis force
Geostrophic current
Horizontal pressure force
Sea surface topography reveals ocean circulation
Ecole d’Eté 2014 9
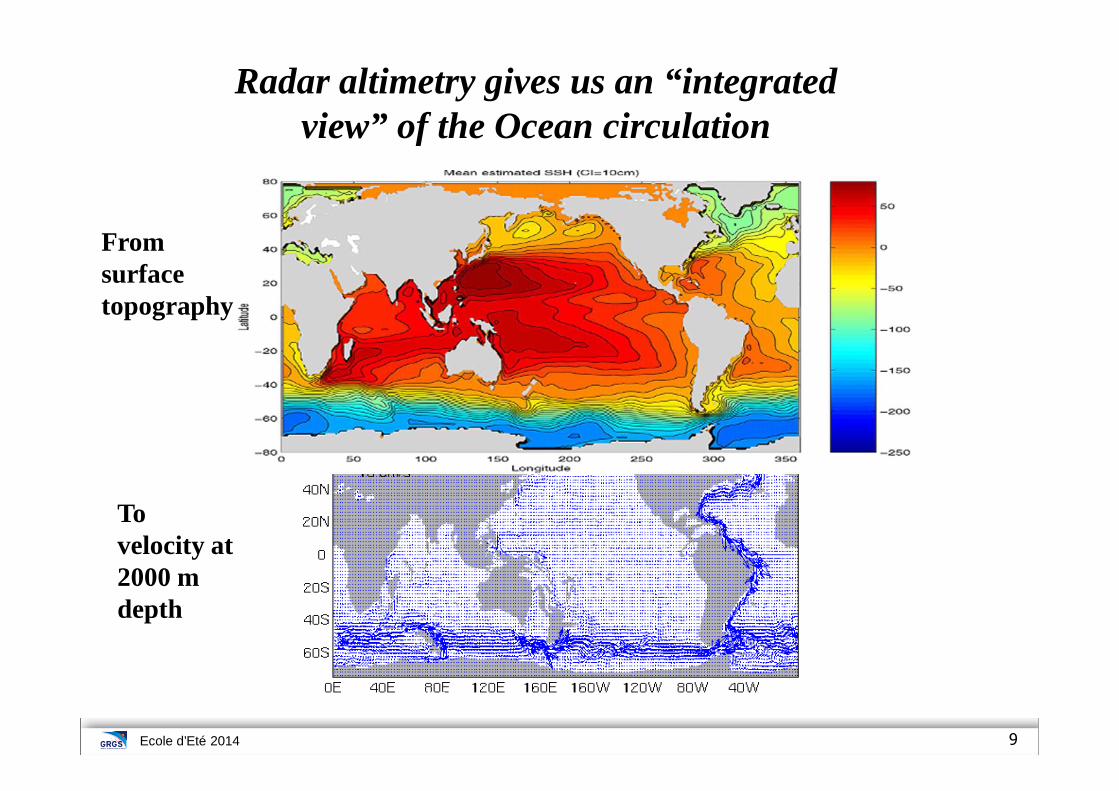
Radar altimetry gives us an “integrated view” of the Ocean circulation
From surface topography
To velocity at 2000 m depth
Sea surface topography reveals ocean circulation

Ecole d’Eté 2014 10
A very large set of applications
Coastal
Altimetry and oceanography

Ecole d’Eté 2014
Variations du niveau moyen des océans
Dynamique océanique:Courants, tourbillons, marées, ‘el niño’
Géoïde et circulation grande échelle
Météo marine: vent, vagues
11
Sur océan : Que voit-on avec les données altimétriques ?

Ecole d’Eté 2014
10 km
Ocean oscillation (El
Niño, Pacific Decadal
Oscillation, North
Atlantic Oscillation).Major currents
(Gulf Stream,
etc).Eddies, tides.
Waves, cyclones,
storms.
100 km
1,000 km
10,000 km
To study wide spatial and temporal scales
Spatial scales

Ecole d’Eté 2014
Time scales
1 century
10 years
100 days
10 days
1 day
Variations in global
mean sea level.
North Atlantic and Pacific
oscillation;
recurrence of phenomena
such as El Niño.
Seasonal
variations.
Variations in typical
eddies.Variations due to tides,
winds, eddies in areas of
major activity, storms
and cyclones.

Ecole d’Eté 2014
14
Varying amplitude
The amplitude of
the observed
phenomena
ranges from a
few tens of
metres to several
millimetres for
the mean sea
surface height
signal.
4 000
2 000
0
-2 000
-4 000
2 000
1 000
0
- 500-1 000
500
1 500
400
200
0
- 200
Latitude Latitude Latitude
Geoid undulations:
Amplitude of a
several tens of
metres.
Major western
boundary currents:
Amplitude of about 1
metre.
Mesoscale
circulation:
Amplitude of about 1
decimetre.

Ecole d’Eté 2014
15
- Higly performing radar altimeters- Precise orbit determination systems- Additional systems (e.g. radiometer)
Key components of an altimetric mission
Altimetry system and altimeter data processing

Ecole d’Eté 2014
16
Precision of the SSH:
•Orbit error
•Errors on the range
• Instrumental noise
•Various instrument errors
•Various geophysical errors (e.g., atmospheric attenuation, tides, inverse barometer effects, …)
Sea Surface Height (SSH) (relative to an earth ellipsoid)= Orbit height – Range
SSH = Orbit – Range – ΣCorr
Orbit errors in position of satellite
Principles of radar altimetry. SSH measurements

Ecole d’Eté 2014
Sampling of the waveform
xxxxxxxxxxxxxxxxxx x x x x x x x x x x x x x x x x x x
64 samples (ERS, Poseidon-1)
128 samples (Topex, Poseidon-2 and 3, RA2)
Power
Frequency/time/distance
10 KHz ≡≡≡≡ 3.125 ns ≡≡≡≡ 47 cm
The range resolution of an altimeter is about half a metre (3.125 ns) but the
range measurement performance over ocean is about one order of
magnitude better. This is achieved by fitting the shape of the echo waveform
to a model function which represents the form of the echo (Brown, Hayne) +
averaging over a large number of echoes (PRF > 2000 Hz)

Ecole d’Eté 2014
Nadir altimeter • Altimeter over ocean: Classical Brown model
• Basic assumption:homogeneity of the surface backscatter over the footprint
• Not true in presence of small island, surface slick, currents etc.. i.e. Strong variations of surface backscatter at scale < footprint size
• In such cases: altimeter can be seen as an imager of the surface backscatter whose geometry is annular and not rectangular

Ecole d’Eté 2014
Radar Equation
Radar equation
(in the case of a
punctual target)
σπλ
= 243
20
e2
r GR)4(
PTP
σ : backscattering section
Extended target = Sum of all the elementary scattering cells on the S surface
∫σ=σSurface
0dS σ0 : backscattering coefficient
(sigma naught)
Example : POSEIDON2 emits 5W with SNR=20 dB if σ0=11dB

Ecole d’Eté 2014
Mathematical formulation of the echo
)t(PFs)t(Q)t(RI)t(S ⊗⊗=RI(t) : Point target response of the radar
Q(t) : Probability density function of the scatterers
PFs(t) : Radar response to a calm sea to a short pulse
+γ
=α
eRh
1h
c4
2s
2p
2c σ+σ=σ )
2(sin.
)2(Log.21 02
e
θ=γ
Formulation of the HAYNE’s model (simplified form without skewness)
n
2c
c
2cu P
2texp
2
terf1
2
P)t(S +
ασ−τ−α−
σασ−τ−
+=
with T5.0p =σ
)c2/(SWHs =σ
Application à SARAL : vous avez 2 heures ….

Ecole d’Eté 2014
Retracking function : on-ground processing
For each averaged waveform (20Hz), fitting procedure between a model and the measured waveform
Energy of the pulse :
backscatterPu :
Slope of the trailing edge :
antenna mispointing
x :
Leading edge slope
Wave height
SWH :
Time to reach mid-power point
Distance, Rt :
Instrument noise Pb :
t

Ecole d’Eté 2014
50 100
After 1 iteration50 100
After 2 iterations
0 50 100
After 3 iterations50 100
After 5 iterations
0 50 100
After 7 iterations
50 100
After 10 iterations
Retracking algorithm :
Iterative fitting procedure (LSE) solving for N parameters (range, SWH, Pu, ξξξξ2, λλλλs, TN, ...)
Many possible solutions
� On each waveform
� On packet of waveforms

Ecole d’Eté 2014 23
Satellite orbits are the reference frame for the altimetric measurements. T/P flies at 1336 km altitude and the satellite’s exact position needs to be accurately determined.
• An error in the radial orbit component (z) produces the same magnitude error in SSH.
• An error in the satellite’s alongtrack position, multiplied by the orbit slope, gives an error in SSH.
• An error in the onboard clock is similar to an error in alongtrack position
Precise orbit determination is made by specialist teams at the space agencies, using:
• force perturbation models on the satellite
• tracking data.
Satellite Altimetry Orbits

Ecole d’Eté 2014 24
Satellite tracking is also made usingcomplementary systems : Laser tracking, DORIS and GPS
Satellite Laser Ranging (SLR).
A network of laser ground stations makedirect, precise measurements of the distance between the satellite and the laser ground station.
GPS
An onboard GPS receiver provides precise, continuous tracking of thesatellite by monitoring range and timing signals from up to 12 GPS satellites at the same time.
Satellite Tracking Systems … Laser Tracking and GPS
Altimetry system and altimeter data processing

Ecole d’Eté 2014 25
Altimeter measurements of sea surface topography are affected by a large number of errors :
• propagation effects in the troposphere and the ionosphere, electromagnetic bias,
• errors due to inaccurate ocean and terrestrial tide models, residual geoid errors,
• inverse barometer effect.
Some of these errors can be corrected with dedicated instrumentation : dual-frequency altimeter for ionospheric correction and radiometer for wet tropospheric correction.
Errors on altimeter measurements
Altimetry system and altimeter data processing

Ecole d’Eté 2014
• Oscillator Drift Error : - Altimeter measures time by counting oscillator cycles- Error is due to a drift in the oscillator frequency (of the order of 1 cm)
• Doppler Shift Effect : - due to the relative velocity between the satellite and the sea surface- depends on the range rate, and the emitted frequency - range errors of + - 13 cm for the Ku band, +-5 cm for C band
• Internal Calibration- internal transit time in the altimeter- correction is a few cm
• Pointing angle error- Off-nadir pointing errors impacts the return pulse shape- Processing algorithms allow to compensate for this effect (up to 0.7°pointing error), but side effects are encountered on estimatedparameters (trailing edge)
Instrumental Corrections …
Altimetry system and altimeter data processing

Ecole d’Eté 2014 27
Dry TroposphereThe mass of dry air molecules in the atmosphere causes a range delay called the dry tropospheric effect. It is directly proportional to the surface pressure, with an average magnitude of 2.3 m (over the ocean). This correction is computed using atmospheric model pressure forecasts. The error is of the order of 1 cm / 4 mbar, or on average 0.7 cm.
Wet TroposphereThe range delay due to the atmospheric water vapor, the wet tropospheric effect, varies considerably both spatially and temporally, with magnitudes from 5 cm to 30 cm (maximum in the tropical convergence zones, where atmospheric convection is important).
The wet tropospheric correction is computed using either the on-board microwave radiometer measurements, with a precision better than 1.7 cm, or the water vapor content is calculated from atmospheric models.
Range Delay due to Atmospheric Refraction
Altimetry system and altimeter data processing

Ecole d’Eté 2014 28
Wet troposphere content as seen by Topex radiometer
Altimetry system and altimeter data processing

Ecole d’Eté 2014 29
•The radar pulse is delayed in the ionosphere (altit ude of 50 - 2000 km) due to the presence of electrons, produce d by the ionization in the high atmosphere by the incide nt solar radiation.
•The range delay is related to the EM radiation freq uency, so the correction can be estimated using two different radar frequencies (e.g. TOPEX, or DORIS). Otherwise estim ated from models of the vertically integrated electron d ensity.
•The delay can produce range errors from 1 to 20 cm. The accuracy of the dual-frequency correction is 0.5 cm .
Ionospheric Refraction
Altimetry system and altimeter data processing

Ecole d’Eté 2014 30
Spatial distribution•the Total electron
count is mainly
correlated to the
geomagnetic field,
maximum in the
tropical band
•the highest
electronic
perturbation
occurs at about
400 km altitude
Ionospheric Correction – spatial variability
Altimetry system and altimeter data processing

Ecole d’Eté 2014 31
•Temporal variability•Strongly diurnal,
maximum at 2 pm and
minimum around 5 am
•the TEC has seasonal
variations
•the TEC is correlated with
the solar activity (sunspots),
and the geomagnetism
Ionospheric Correction – temporal variability
Altimetry system and altimeter data processing

Ecole d’Eté 2014 32
Electromagnetic bias
The concave form of wave troughs tends to concentrate and better reflect the altimetric pulse. Wave crests tend to disperse the pulse. So the mean reflecting surface is shifted away from mean sea level toward the troughs.
Mean Sea Level
Mean Reflecting Surface
Sea State Effects
Altimetry system and altimeter data processing

Ecole d’Eté 2014 33
Skewness bias
For wind waves, wave troughs tend to have a larger surface area than the pointy crests – the difference leads to a skewness bias.
Again, the mean reflecting surface is shifted away from mean sea level toward the troughs
The EM Bias and skewness bias (= Sea State Bias or S SB) vary with increasing wind speed and wave height, but in a non -linear way.
SSB is estimated using empirical formulas derived from altimeter data analysis (crossover, repeat-track differences and parametric/non-parametric methods). The range correction varies from a few to 30 cm. SSB bias accuracy is ~2 cm.
Empirical estimation of the SSB also includes tracker bias (depends on H1/3).
Sea State Bias
Altimetry system and altimeter data processing

Ecole d’Eté 2014 34
Use of non-parametric methods to estimate SSB (SWH, Wind) (Labroue, 2007)
-30 cm 0 cm -30 cm 0 cm
Sea State Bias
Jason SSB Topex LES SSB
Altimetry system and altimeter data processing

Ecole d’Eté 2014 35
SSH = Orbit Altitude - Range – corrections
ΣΣΣΣ corrections =
• instrumental corrections
• sea state bias corrections
• ionospheric correction
• tropospheric corrections (wet, dry)
•Tides (ocean, earth) + Inverse barometer
Errors = errors in orbit, in corrections and instru mental noise
Corrected Altimetric Sea Surface Heights
Altimetry system and altimeter data processing

Ecole d’Eté 2014
➪ Altimeter
● Instrumental noise 1.7 ● E-M bias 2.0● Skewness 1.2● Ionospheric corr. 0.5● Wet Tropospheric corr. 1.1 ● Dry tropospheric corr. 0.7● SWH 0.2 m● Wind Speed 2 m/s
➪ Range total error 3.2 cm
➪ Orbit error (radial) <1.5 cm (T/P-Jason-1) < 2.5 cm (ENVISAT)
➪ Instantaneous sea level error <3.5 cm (T/P-Jason-1)<4.1 cm (ENVISAT)
Performances
Topex-Poseidon – Jason-1 – ENVISAT
Altimetry system and altimeter data processing

Ecole d’Eté 2014 37
Oceanic signal
0
10
20
30
40
50
60
70
80
90
orbit errorRA errorIonosphereTroposphereEM Bias
100Centimeters
Geos 3 SEASAT GEOSAT ERS T/P(before launch)
T/P(after launch)843 km
115°various repeat cycles
800 km108°3 days
800 km108°17 days (ERM)
780 km98.5°35 days(3/168)
1336 km66°
9.95 days
EMR
PRARE TMR
GPS/DORIS
Jason-1/2ENVISAT
Error Budget for altimetric missions
Altimetry system and altimeter data processing

Ecole d’Eté 2014
• Spatial coverage :
TOPEX/Poseidon or Jasons Sampling
- global
- homogeneous
• Temporal coverage :- repeat period10 days, T/P-Jason-1/217 days, GFO35 days, ERS/ENVISAT
1 measure/1 s (every 7 km) all weather (radar)
- Nadir (not swath)
Exact repeat orbits (to within 1 km)
Satellite altimetry coverage
Altimetry system and altimeter data processing

Ecole d’Eté 2014 39
780 km98°
35 daysENVISAT
1336 km66.03°
9.915 days 1h52
Jason-1
Repeat Period and Groundtracks
Altimetry system and altimeter data processing

Ecole d’Eté 2014 40
Sampling Issues
• How many altimeters are needed to
monitor the ocean circulation ?
• Difficult issue. Depends on objectives (e.g.
large scale circulation).
• Mesoscale variability sampling is a major
objective for altimetry.
Sampling issue

Ecole d’Eté 2014 41
To better understand the ocean circulation and its role on climate, one needs to resolve the mesoscale
variability
This is also required for most of the operational applications (e.g. marine safety, pollution monitoring, offshore industry, fisheries).
Two altimeter missions at leastare needed to get a “good” representation of mesoscale
variability (e.g. Koblinsky et al., 1992).
Complementarity of Jason-1 and ENVISAT
Mesoscale variability : a key factor
Sampling issue

Ecole d’Eté 2014 42
Subsample model fields (sea level anomaly) along altimeter tracks. Add a random noise.
Use of a sub-optimal space/time mapping method to reconstruct the 2D sea level anomaly signal from simulated along-track data.
Compare the reconstructed fields with the reference (model) fields(sea level and velocity) => allows an estimation of the sea level and velocity mapping error
Add extra noise and compare the reconstructed fields with the 10-day average fields=> allows an estimation of the mapping errors on 10-day average fields
Simulations with the Los Alamos model(Le Traon et al., 2001 and Le Traon and Dibarboure, 2002)
Mapping capabilities of Jason-1 (T/P) + ENVISAT (ERS)
Sampling issue

Ecole d’Eté 2014 43
LAM rms SLA
Rms Mapping
error
Sea level mapping error from Jason-1+ENVISATsimulated from the Los Alamos Model (instantaneous and 10-day averaged fields)
Sampling issue

Ecole d’Eté 2014 44
Sea level can be mapped with an accuracy of 5 to 10% of the signal
variance
Velocity mapping error from 20 to 40% of the signal variance
A large part of the mapping errors is due to high frequency (< 20 days) and high wave numbers signals.
Errors on 10-day averages are much smaller.
Summary of Jason-1 + ENVISAT mapping capabilities
Sampling issue

Ecole d’Eté 2014 45
[c] 1998 D.B. Chelton
ERS/EN repetitivity
ER
S/E
N in
ter-
trac
k
TP
/J1
inte
r-tr
ack
TP/J1 repetitivity
Alo
ng-t
rack
res
olut
ion
Global sea level variability
Sea surface circulation variability /
Mesoscale activity
�
� Merging information from different altimeters leads to a better representation of the surface state (but not complete …)
45
Not a ll the physical processes are observable with the altimeterNot all the physical processes are observable with the altimeter

Ecole d’Eté 2014 46
���� Geostrophic speed anomalies (U’, V’) computed by finite differences
���� EKE = ½ * (U’² + V’²)
Mean EKE (cm2/s2)
J1E2TPG2J1E2TPJ1E2J1
MERGING SATELLITE DATA Eddy energy
Sampling issue

Ecole d’Eté 2014 47
MERGING SATELLITE DATA Jason-2 and Jason-1 flying in tandem

Ecole d’Eté 2014 48
Integrated
Operational
Oceanography
Space Observation
In situ Observation
Assimilation Model
Developing a permanent global observation system





























