Embed Size (px)
Citation preview

LINEARNI MODEL PROIZVODNJE
(8.3.2017)
Doc. dr. sc. Tunjo Perić

SADRŽAJ
Pojam i značenje optimizacije proizvodnje, optimizacija
proizvodnog programa
Optimizacija proizvodnje u uvjetima globalizacije i povećane
konkurentnosti
Uvod u optimizaciju proizvodnog programa metodom
linearnog programiranja
Grafičko rješavanje modela linearnog programiranja
2

1. Pojam i značenje optimizacije proizvodnje
U proizvodnim organizacijama proizvodnja je osnovna,
najvažnija i najsloženija faza procesa reprodukcije.
Značenje proizvodnje ogleda se u sljedećem:
Rezultat proizvodnje materijalna su dobra bez kojih ne može opstati
niti jedno društvo;
U fazi proizvodnje stvara se upotrebna vrijednost, vrijednost i
novostvorena vrijednost;
U proizvodnji je angažiran veliki dio sredstava i radne snage poduzeća.
Za pripremu i sam proces proizvodnje vezani su određeni
problemi, među kojima se ističu:
3

1. Određivanje optimalnog proizvodnog programa,
2. Odabir optimalnih tehnoloških varijanti,
3. Određivanje najpovoljnije smjese sirovina,
4. Optimalno krojenje materijala,
5. Određivanje liste ukupno potrebnih količina pojedinih
proizvodnih čimbenika za slučaj poznate strukture i
kvantitativnih pokazatelja proizvodnog programa,
6. Najpovoljnije opterećenje strojeva,
7. Određivanje optimalnog unutarnjeg transporta,
8. Najpovoljniji raspored radnika na radnim zadacima i sl.
Rješavanje navedenih proizvodnih problema u industrijskim
poduzećima kontinuirani je proces i zahtijeva primjenu
suvremenih matematičkih modela i metoda.
4
Pod optimizacijom proizvodnje podrazumijeva se proces
organizacije upravljanja koji osigurava dostizanje
najboljeg stanja s ekonomskog stajališta ili maksimalno
moguće približavanje tom stanju.
Značenje optimizacije proizvodnje proizlazi iz objektivnih
ekonomskih zakona robne proizvodnje, koji pretpostavljaju
maksimalnu efektivnost iskorištenja svih resursa.
Pri rješavanju navedenih proizvodnih problema koriste se
metode jednokriterijskog i višekriterijskog linearnog i
nelinearnog programiranja, metode asignacije, metode
simulacije, teorija zaliha, dinamičko programiranje, teorija
repova čekanja i sl.
5

Pod pojmom proizvodnog programa podrazumijevamo skup određenih vrsta proizvoda koje poduzeće proizvodi ili planira proizvoditi u izvjesnom vremenskom razdoblju te strukturu obujma njihove proizvodnje.
Optimalni proizvodni program vrlo je dinamična pojava i može se ostvariti samo stalnim nastojanjem da se prema zahtjevima tržišta do najveće moguće mjere iskoriste vlastita sredstva, odnosno proizvodne, financijske i kadrovske mogućnosti poduzeća.
Proizvodni program industrijskog poduzeća bitno se odražava na značenje, mjesto i položaj poduzeća na tržištu, a zatim i na ostvarenje rezultata poslovanja poduzeća.
Položaj poduzeća na tržištu putem proizvodnog programa naročito se pokazuje kroz količinu i vrijednost prodaje, politiku prema kupcima, kanale distribucije i politiku cijena.
6

Najvišu kvalitetu imat će proizvodni program koji poduzeću
osigurava najvišu razinu rezultata poslovanja izraženu
ekonomskim parametrima. Takav proizvodni program
predstavlja, u stvari, optimalni proizvodni program poduzeća
za određeni period.
2. Optimizacija proizvodnje u uvjetima globalizacije i
povećane konkurentnosti
Racionalni sustav planiranja proizvodnje ne može se ostvariti
bez primjene matematičkih metoda. Primjena matematičkih
metoda dovodi do optimalnog plana proizvodnje.
Planiranje uz pomoć matematičkih metoda ima sljedeće
prednosti:
7

Ciljevi se mogu formulirati tako da neposredno izražavaju interese
poduzeća i društva,
Ciljevi se mogu izraziti jednostavnim jezikom matematike,
Cijeli proces planiranja se pojednostavljuje,
Uz pomoć računala moguća je primjena sustava za potporu
odlučivanju.
Posljednjih dvadesetak godina gospodarsku aktivnost prati
proces globalizacije, pod kojim podrazumijevamo
okrupnjavanje poduzeća u gotovo svim granama
gospodarstva.
Okrupnjavanje poduzeća provodi se: a) preuzimanjem manjih
poduzeća od strane velikih multinacionalnih korporacija, b)
otvaranjem filijala velikih multinacionalnih korporacija u
gotovo svim zemljama svijeta, te c) seljenjem proizvodnje u
zemlje Dalekog istoka, zbog niže cijene radne snage.
8

Ovaj proces omogućile su političke promjene u bivšim
socijalističkim zemljama i Kini te snažni razvoj
informacijske tehnike i tehnologije.
Ovo ima za posljedicu povećanu konkurenciju u gotovo
svim proizvodnim granama.
Iz toga proizlazi logičan zaključak da poduzeća koja žele
opstati na tržištu i dalje se razvijati, moraju maksimalno
racionalizirati svoje poslovanje.
Primjena matematičkih metoda optimizacije trebala bi
poduzećima pomoći da lakše prevladaju povećane probleme
prouzročene globalizacijom i povećanjem konkurencije.
9

3. Optimizacija proizvodnog programa linearnim
programiranjem
Linearno programiranje
• Linearno programiranje predstavlja metodu određivanja
optimalnog rješenja problema odlučivanja kod kojih su relacije
između varijabli u funkciji cilja i skupu ograničenja linearne.
Optimalno rješenje je “najbolje” rješenje iz skupa dopustivih
rješenja u skladu sa usvojenim kriterijem za koje funkcija cilja
doseže ekstremnu vrijednost - maksimum ili minimum.
10
Matematička formulacija problema linearnog
programiranja (LP) sastoji se u tome da je potrebno naći
takav skup vrijednosti varijabli iz područja
dopustivih rješenja S, koji je određen sustavom linearnih
nejednadžbi / jednadžbi, za koje funkcija cilja doseže
maksimalnu (minimalnu) vrijednost.
Pod naprijed navedenim uvjetima, za pronađeni skup
vrijednosti varijabli kažemo da predstavljaju optimalno
rješenje.
Model linearnog programiranja
Model koji je definiran linearnom funkcijom cilja s n varijabli
1 2, ,..., nx x x
11

(1)
i sustavom od m linearnih nejednadžbi / jednadžbi na tom
skupu varijabli zajedno s n ograničenja nenegativnosti varijabli
(2)
naziva se model linearnog programiranja ili linearni model.
1 1 2 2max/ min ... n nz c x c x c x
11 1 12 2 1 1
1 1 2 2
1,1 1 1,2 2 1, 1
...
...
...
n n
k k kn n k
k k k n n k
a x a x a x b
a x a x a x b
a x a x a x b
1 1 2 2
1,1 1 1,2 2 1, 1
1 1 2 2
1 2
...
...
...
, ,..., 0
l l ln n l
l l l n n l
m m mn n m
n
a x a x a x b
a x a x a x b
a x a x a x b
x x x
12

U modelu (1) – (2) upotrijebljene su sljedeće oznake:
xj – varijable odlučivanja ili strukturne varijable;
z – funkcija cilja ili funkcija kriterija (engl. objective
function);
cj – koeficijent (parametar) funkcije cilja po jedinici j-te
varijable;
aij - strukturni koeficijenti u ograničenjima (količina i-tog
ograničenja potrebna za jedinicu j-te varijable);
bi – vrijednost ograničenja;
i = 1,...,m; j=1,...,n.
Prema tome, osnovni elementi gore opisanog matematičkog
modela jesu:
Funkcija cilja i
Skup ograničenja.13

Upotrebom operatora zbrajanja model definiran relacijama
(1) i (2) može se napisati u obliku:
pri ograničenjima (p.o.)
1
max/ minn
j j
j
z c x
1
1
1
, 1,...,
, 1,...,
, 1,...,
0, 1,..., .
n
ij j i
j
n
ij j i
j
n
ij j i
j
j
a x b i k
a x b i k l
a x b i l m
x j n
14

Naprijed definirani model možemo napisati i u matričnom
obliku.
Sadržina linearnog modela
Problemi poslovnog odlučivanja koji se rješavaju metodama
LP izražavaju se kroz sljedeće komponente:
Alternativne aktivnosti,
Funkciju cilja i
Ograničenja.
Prema tome, model LP definiran je skupom varijabli
, funkcijom cilja i skupom ograničenja. 1 2, ,..., nx x x
15

Varijable u linearnom modelu
Rješenje modela LP predstavljaju vrijednosti varijabli za koje
funkcija cilja doseže svoju ekstremnu vrijednost.
Definirane se varijable predstavljaju u n-dimenzionalnom
vektorskom prostoru Rn vektorom
Varijable odlučivanja odražavaju alternativne načine za
postizanje cilja.
Varijable u linearnom modelu nose naziv strukturne varijable
ili varijable originala (primala), odnosno varijable odlučivanja
(decision variables).
U modelu optimizacije proizvodnog programa varijablama
su izražene količine proizvoda koje se proizvode ili mogu
proizvoditi u promatranom periodu.
1 2 ... .T
nx x x x
16

Funkcija cilja
Pri optimiranju proizvodnog programa kao funkcija cilja može
se pojaviti maksimizacija: dobiti, obujma proizvodnje,
iskorištenja kapaciteta, ukupnog prihoda i sl.
Također, kao funkcija cilja može se pojaviti minimizacija
ukupnih troškova.
Funkcija cilja se matematički definira kao:
gdje je cj koeficijent funkcije cilja po jedinici j-te varijable,
npr. dobit po jedinici proizvoda ili troškovi proizvodnje po
jedinici proizvoda.
Prema tome, funkcija cilja linearnog modela je linearna
funkcija s n varijabli za koju je potrebno odrediti ekstremnu
vrijednost (maksimum ili minimum) na skupu dopustivih
rješenja definiranih skupom ograničenja.
1 1 2 2max/ min ... ,n nz c x c x c x
17

Skup ograničenja modela
U skupu ograničenja se pojavljuju iste varijable kao i u
funkciji cilja.
Skup ograničenja definira u n-dimenzionalnom prostoru Rn
domenu ili skup dopustivih (mogućih) rješenja S.
Ograničavajući uvjeti linearnog modela definirani su sustavom
od m linearnih nejednadžbi/jednadžbi modela, tako da sustav
(2) može biti:
Proturječan (ne postoji skup dopustivih rješenja)
Nije proturječan, ali je skup S neograničen (postoji mogućnost
određivanja optimalnog rješenja ako je funkcija cilja ograničena u
neograničenom području) i
Nije proturječan i skup S je ograničen (ima rješenje).
18

U n-dimenzionalnom vektorskom prostoru Rn, poseban slučaj
linearne zavisnosti jest hiperravnina dana jednadžbom
Ova hiperravnina dijeli vektorski prostor Rn na vektorske
poluprostore
Razmotrimo skup dopustivih rješenja s geometrijskog
stajališta.
Promatrajući n-dimenzionalni prostor Rn kao vektorski, svako
ograničenje tipa nejednakosti manje ili jednako, odnosno veće
ili jednako definira skup točaka jednog
poluprostora, uključujući i granične točke poluprostora.
1
, 1,2,..., .n
ij j i
j
a x b i m
1 1
i .n n
ij j i ij j i
j j
a x b a x b
1 2( , ,..., )nx x x
19

U dvodimenzionalnoj ravnini ograničenja tipa nejednakosti
definiraju odgovarajuću poluravninu uključujući i
točke na graničnom pravcu.
Ograničenja tipa jednakosti sadrže samo točke koje se
nalaze na hiperravnini n-dimenzionalnog vektorskog prostora,
odnosno u dvodimenzionalnoj ravnini samo točke koje se
nalaze na pravcu.
S obzirom da linearni model ima m ograničenja, to će
svako od njih definirati po jedan poluprostor ili
hiperravninu, odnosno u dvodimenzionalnom prostoru
jednu poluravninu ili pravac.
Skup dopustivih rješenja S dobije se kao presjek skupova
točaka svih poluprostora, odnosno hiperravnina (u
dvodimenzionalnom prostoru presjek poluravnina i pravaca)
definiranih sustavom ograničenja (2).
( ili )
20
Promatrajmo dvije točke x1 i x2 skupa dopustivih rješenja S.
Ma koja točka dužine koja spaja točke x1 i x2 je linearna
kombinacija točaka x1 i x2 izražena u obliku
Ako se uključi uvjet da je , onda se ova linearna
kombinacija naziva konveksnom kombinacijom dviju
točaka.
Konveksni skup točaka predstavlja onaj skup točaka koji pored
svoje bilo koje dvije točke x1 i x2 sadrži i sve točke segmenta
(dužine) koji povezuje točke x1 i x2. Takav konveksni skup
točaka, za razliku od konkavnog može se predstaviti
konveksnim poliedrom.
Skup dopustivih rješenja S u linearnom modelu
udovoljava osobinama konveksnog skupa točaka.
Na konveksnom skupu razlikuju se dvije vrste točaka:
ekstremne i neekstremne.
1 2(1 ) .x x x
0 1
21

Za bilo koji konveksni skup S, točka P u S je ekstremna
točka ako svaki linijski segment koji spaja dvije točke iz
skupa S, a leži potpuno u S i sadrži točku P, ima P kao krajnju
točku tog linijskog segmenta.
Konveksni skup se naziva konveksnim poliedrom ako je
ograničen i ako mu je broj ekstremnih točaka (tjemena)
konačan.
Skup dopustivih rješenja (konveksni poliedar) ne daje odgovor
na pitanje izbora optimalnog rješenja, već ga daje linearna
forma (1) (funkcija cilja) koja ekstremnu vrijednost
(maksimum ili minimum) doseže u ekstremnoj točki
konveksnog poliedra.
Funkcija cilja u prostoru Rn je predstavljena skupom
paralelnih hiperravnina (u dvodimenzionalnom prostoru
skupom paralelnih pravaca). Ovo ćemo detaljnije obrazložiti
kod grafičke interpretacije LP.22

Prema tome, matematički oblik ograničenja može biti
definiran jednadžbama i nejednadžbama oblika manje ili
jednako te veće ili jednako.
Ograničavajući su uvjeti najčešće definirani fiksnim
količinama određenih resursa.
Pod pojmom resursi shvaćaju se svi proizvodni i
neproizvodni čimbenici koji se mogu kvantificirati (kapaciteti
strojeva, novčana sredstva, radna snaga, prostor, raspoloživi
repromaterijal i sl.).
Iskorištenost resursa ne može prelaziti definirane granice
(količine resursa), pa se u matematičkom smislu izražavaju
nejednadžbama oblika manje ili jednako.
Tako se i-to ograničenje može napisati u obliku:
1 1 2 2 ...i i in n ia x a x a x b
23

gdje su:
aij - strukturni ili tehnički koeficijenti u i-tom ograničenju, a definiraju
količinu i-tog resursa potrebnu za jedinicu j-te varijable, i
bi – slobodni koeficijent u i-tom ograničenju, a predstavlja raspoloživu
količinu i-tog resursa.
Ograničenja matematički izražena kao nejednadžbe oblika
veće ili jednako odnose se na određene minimalne zahtjeve,
kao što su: Minimalna proizvodnja,
Minimalni biološki zahtjevi,
Minimalne zalihe,
Minimalno korištenje resursa i sl.
Ograničenja izražena u obliku jednadžbi proizlaze iz
specifičnih zahtjeva, kao što su: Potpuna iskorištenost kapaciteta,
Struktura proizvodnog programa koja iznosi 100 % ili 1 i sl.
24

Postoji još i ograničenje koje se odnosi na zahtjev za
nenegativnošću varijabli, tj. , s obzirom da se odnose na
određene ekonomske veličine, koje ne mogu biti negativne.
Osnovne pretpostavke linearnog modela
Model linearnog programiranja zadovoljava sljedeće
pretpostavke:
Linearnost funkcije cilja i skupa ograničenja,
Diskretnost procesa odnosno varijabli po kojem vrijednost jedne
varijable nema utjecaja na strukturne koeficijente, koeficijente u
funkciji cilja i druge varijable,
Izvjesnost, što znači da su svi koeficijenti u funkciji cilja i skupu
ograničenja unaprijed određeni i zadržavaju svoju konstantnost tijekom
vremena,
0jx
25

Proporcionalnost procesa u modelu , po kojem postoji
proporcionalni odnos između inputa i outputa u modelu. Npr.
ako je dobit po jedinici proizvoda 10 kuna, onda je dobit od 50
jedinica proizvoda jednaka kuna.
Aditivnost procesa u modelu, po kojem su svi koeficijenti u
funkciji cilja izraženi na način da ukupna vrijednost funkcije
cilja bude jednaka zbroju vrijednosti ostvarenih od pojedinih
varijabli. Također, svi strukturni koeficijenti jednog
ograničenja trebaju biti tako definirani kako bi se osiguralo
sumiranje pojedinačnih utrošaka ograničenja po pojedinim
varijablama.
Proizvoljna djeljivost procesa po kojoj varijable mogu
primiti proizvoljne realne vrijednosti, tj. varijable su
kontinuirane.
Konačan broj varijabli i ograničenja.26
50 10 500
Linearni model optimizacije proizvodnog programa
Proizvodni program predstavlja skup svih proizvoda koje
jedno poduzeće nudi na tržištu.
Pored asortimana, u fazi proizvodnog planiranja potrebno je
odrediti i količine pojedinih proizvoda iz asortimana koje
poduzeće planira proizvoditi u određenom periodu.
Osnovni cilj LP u području proizvodnog planiranja jest
određivanje optimalnog proizvodnog programa.
Optimalnim se proizvodnim programom određuju vrste i
količine proizvoda koje će se proizvoditi u određenom periodu
uz najpovoljnije korištenje raspoloživih resursa ostvarujući
najbolji poslovni rezultat.
Mnogobrojna su ograničenja koja se mogu pojaviti pri
optimizaciji proizvodnog programa. 27
Ograničenja se najčešće odnose na raspoložive resurse
(sirovine, strojeve, radnu snagu, financijska sredstva i sl.) i
tržišna ograničenja (mogućnosti nabave i prodaje).
Kao funkcija cilja obično se javlja maksimizacija dobiti ili
ukupnog prihoda, odnosno minimizacija ukupnih troškova
poslovanja.
Opći, standardni i kanonski oblik modela LP
Postoje dva osnovna tipa linearnih modela, i to za:
Maksimum i
Minimum.
Na osnovi oblika matematičkih izraza za ograničenja
razlikujemo:
28
Standardni,
Kanonski i
Opći.
Standardni oblik ima sljedeće karakteristike:
Kod linearnog modela za maksimum sva ograničenja su izražena
nejednadžbama oblika manje ili jednako,
Kod linearnog modela za minimum sva ograničenja su izražena
nejednadžbama oblika veće ili jednako.
Kod kanonskog oblika su sva ograničenja izražena u formi
jednadžbi, kako kod problema za maksimum, tako i kod
problema za minimum.
Opći oblik linearnog modela za maksimum i minimum sadrži
kombinaciju formi ograničenja manje ili jednako, jednako i
veće ili jednako.
29

Standardni oblik linearnog modela za maksimum je
sljedeći:
p.o.
(3)
U matričnoj formi standardni oblik (3) može se napisati kao:
(3a)
gdje su
1
maxn
j j
j
z c x
1
, 1,...,
0 1,...,
n
ij j i
j
j
a x b i m
x j n
max
p.o.
0,
z cx
Ax b
x
1 2 ... ,T
nc c c c
1
2,
n
x
xx
x
1
2,
m
b
bb
b
30

Standardni oblik linearnog modela za minimum je:
(4)
11 12 1
21 22 2
1 2
...
...
...
n
n
m m mn
a a a
a a aA
a a a
1
1
min
p.o. , 1,...,
0, 1,...,
n
j j
j
n
ij j i
j
j
z c x
a x b i m
x j n
31

Kanonski oblik linearnog modela za maksimum glasi:
(5)
Kanonski oblik linearnog modela za minimum identičan je
kanonskom obliku linearnog modela za maksimum samo što
se u funkciji cilja riječ “max” zamjenjuje riječju “min”.
Opći oblik linearnog modela dat je relacijama (1) i (2), s tim
što mora sadržavati najmanje dvije forme ograničenja.
1
1
max
p.o. , 1,...,
0, 1,..., .
n
j j
j
n
ij j i
j
j
z c x
a x b i m
x j n
32

Standardni oblik za maksimum transformira se u kanonski
pretvaranjem sustava ograničenja nejednadžbi manje ili
jednako u jednadžbe tako da se na lijevim stranama
ograničenja dodaju varijable koje se nazivaju dopunske ili
izravnavajuće varijable
Koeficijenti u funkciji cilja za dopunske varijable jednaki su
nuli. Prema tome, nakon uvođenja dopunskih varijabli dobiva
se sljedeći model u kanonskom obliku:
(6)
( ).is
1
1
max
p.o. , 1,...,
0, 0, 1,..., , 1,2,..., .
n
j j
j
n
ij j i i
j
j i
z c x
a x s b i m
x s j n i m
33

Standardni oblik za minimum transformira se u kanonski
pretvaranjem sustava ograničenja veće ili jednako u jednadžbe
tako da se na lijevim stranama ograničenja oduzimaju varijable
viška (surplus) , s koeficijentima u funkciji cilja jednakim
nuli, a dodaju se umjetne varijable (ai) s koeficijentom M u
funkciji cilja (M je nespecificirano veliki broj). Nakon
uvođenja dopunskih varijabli kanonski oblik modela izgleda
ovako:
(7)
Prevođenje na kanonski oblik potrebno je kad se model LP
rješava simpleks metodom.
( )ie
1 1
1
min
p.o. , 1,...,
0, , 0, 1,..., , 1,..., .
n m
j j i
j i
n
ij j i i i
j
j i i
z c x Ma
a x e a b i m
x e a j n i m
34

Transformacija općeg oblika linearnog modela za
maksimum u standardni oblik vrši se na sljedeći način:
Ograničenja oblika jednadžbi pretvaraju se u dvije nejednadžbe, jednu
oblika manje ili jednako, a drugu oblika veće ili jednako. Potom se
nejednadžbe oblika veće ili jednako pomnože s (-1), tj.
Ograničenja oblika veće ili jednako množe se s (–1), odnosno
1 1
1
1 1
/ ( 1)
n n
ij j i ij j in
j j
ij j i n nj
ij j i ij j i
j j
a x b a x b
a x b
a x b a x b
1 1
/ ( 1) .n n
ij j i ij j i
j j
a x b a x b
35
Prethodnim operacijama sva su ograničenja izražena
nejednadžbama oblika manje ili jednako, što je
karakteristika linearnog modela u standardnom obliku.
Transformacija općeg modela za minimum u standardni oblik
vrši se na sličan način, samo što se s (–1) množe ograničenja
oblika manje ili jednako, te se na taj način dobivaju sva
ograničenja oblika veće ili jednako, što je karakteristika
standardnog oblika modela za minimum.
Pretvaranje općeg u standardni oblik posebno je važno
kod rješavanja problema LP upotrebom duala.
Transformacija općeg u kanonski oblik vrši se tako da se
dopunske varijable kod ograničenja oblika manje ili jednako
dodaju lijevoj strani, a kod ograničenja veće ili jednako
oduzimaju od lijeve strane nejednadžbe.
36

Metode za rješavanje problema LP
Postoje dvije osnovne grupe metoda pomoću kojih se mogu
rješavati problemi linearnog programiranja:
Simpleks metoda – opća metoda za rješavanje svih problema LP,
Metode prilagođene rješavanju specijalnih vrsta problema, kao što
su transportni problem, problem raspoređivanja (asignacije).
Simpleks metoda predstavlja opći algoritam pomoću kojeg se
rješavaju svi oblici modela LP, kao i značajne grupe problema
koje se mogu prevesti na linearne modele (višekriterijalni
problemi, nelinearni modeli i sl.).
Za potpunije razumijevanje sadržine linearnih modela i
postupka njihovog rješavanja simpleks metodom, u
dvodimenzionalnom prostoru ćemo prikazati grafičku
interpretaciju postupka rješavanja problema LP.
37
Grafičko rješavanje problema LP
Grafički se mogu rješavati linearni modeli sa dvije varijable.
Neka se promatra model sa dvije varijable u obliku:
(8)
p.o.
(9)
1 1 2 2max/ min z c x c x
11 1 12 2 1
1 1 2 2
1,1 1 1,2 2 1
1 1 2 2
1,1 1 1,2 2 1
1 1 2
k k k
k k k
l l l
l l l
m m
a x a x b
a x a x b
a x a x b
a x a x b
a x a x b
a x a
2
1 2
, 0
mx b
x x
38
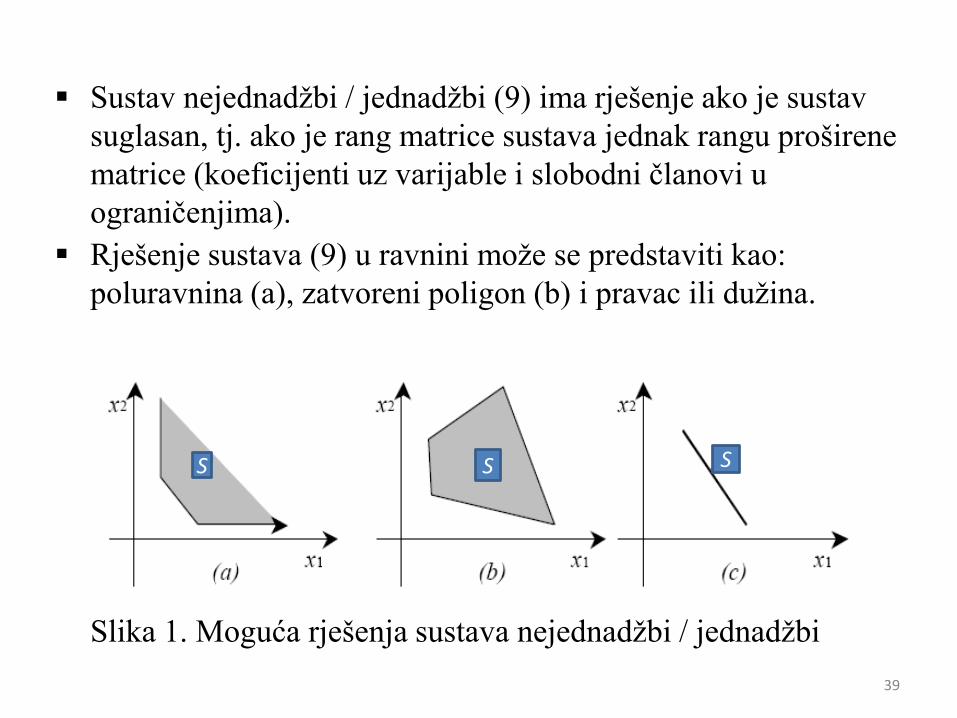
Sustav nejednadžbi / jednadžbi (9) ima rješenje ako je sustav
suglasan, tj. ako je rang matrice sustava jednak rangu proširene
matrice (koeficijenti uz varijable i slobodni članovi u
ograničenjima).
Rješenje sustava (9) u ravnini može se predstaviti kao:
poluravnina (a), zatvoreni poligon (b) i pravac ili dužina.
Slika 1. Moguća rješenja sustava nejednadžbi / jednadžbi
39
S S S
Skup točaka S dobiven rješavanjem sustava (9) naziva se skup
dopustivih rješenja. Taj skup je konveksan.
U skupu S se mogu uočiti ekstremne točke (tjemena poligona)
među kojima se nalazi optimalno rješenje.
Linearna forma (8) predstavlja familiju paralelnih pravaca
pošto koeficijent smjera –c1/c2 ne zavisi od varijable z.
Rješenje problema se sastoji u određivanju onog pravca koji
sa skupom S ima bar jednu zajedničku točku, a u kojoj
linearna forma (8) doseže maksimalnu/minimalnu vrijednost.
Ta točka predstavlja optimalno rješenje modela.
Najprije ćemo unutar skupa dopustivih rješenja naći jednu
točku (x1, x2) i izračunati vrijednost z0 (x1, x2) te nacrtati pravac
c1x1 + c2x2 = z0, koji predstavlja isoprofitnu liniju (kod
problema minimuma predstavlja isotroškovnu liniju).
Isoprofitna linija pokazuje kombinacije varijabli x1 i x2 koje
osiguravaju konstantnu vrijednost funkcije z na razini z0.
40
Ima beskonačno mnogo isoprofitnih linija koje su sve
međusobno paralelne, jer sve one imaju konstantan koeficijent
smjera – c1/c2.
Veća vrijednost z0 doseže se na točkama skupa dopustivih
rješenja koje su udaljenije od ishodišta koordinatnog sustava, a
najveća vrijednost z0 doseže se na najudaljenijoj točki
konveksnog skupa.
U slučaju da su oba koeficijenta u funkciji cilja veća od nule
maksimalna se vrijednost funkcije cilja doseže u najudaljenijoj
točki (točkama) presjeka z i skupa S, dok se minimalna
vrijednost doseže u najbližoj točki ishodištu koordinatnog
sustava.
41

U slučaju kad je jedan od koeficijenata c1, c2 negativan onda se
maksimalna vrijednost linearne forme doseže pomicanjem
pravca z duž osi kojoj odgovara varijabla s pozitivnim
koeficijentom, dok se minimalna vrijednost doseže
pomicanjem pravca z duž osi kojoj odgovara varijabla s
negativnim koeficijentom.
Ilustrativni primjer
Jedno poduzeće proizvodi dvije vrste radnih stolova – radni
stolovi tipa A i radni stolovi tipa B. Za proizvodnju jednog
radnog stola tipa A potrebno je 2 sata rada radnika na sječenju,
1 sat rada radnika na oblikovanju i 3 sata rada radnika na
završnoj obradi, dok je za proizvodnju jednog radnog stola tipa
B potrebno 2 sata rada radnika na sječenju, 2 sata rada radnika
na oblikovanju i 1 sat rada radnika na završnoj obradi. 42
Poduzeće svaki dan ima na raspolaganju 140 sati rada radnika
na sječenju, 120 sati rada radnika na oblikovanju i 150 sati
rada radnika na završnoj obradi.
Koliko dnevno treba proizvesti radnih stolova tipa A, a koliko
radnih stolova tipa B da bi ukupni profit poduzeća bio
maksimalan, ako poduzeće ostvaruje profit od 10 $ po radnom
stolu tipa A, odnosno 8 $ po radnom stolu tipa B?
Rješenje:
Varijable odlučivanja:
x1 – broj radnih stolova tipa A,
x2 – broj radnih stolova tipa B.
Funkcija cilja:
Max z = 10 x1 + 8 x2
43

Ograničenja:
Najprije ćemo grafički predstaviti sve nejednadžbe
ograničenja, a to je najjednostavnije napraviti uzimajući
jednakosti umjesto nejednakosti, kako bi se mogli grafički
predstaviti pravci koji odgovaraju ograničenjima.
Potom se u prvom kvadrantu koordinatnog sustava nacrtaju
dužine koje odgovaraju jednadžbama.
Nakon toga se strelicom označi smisao nejednakosti.
Kao rezultat toga formira se skup dopustivih rješenja.
1 2
1 2
1 2
1 2
2 2 140
2 120
3 150
, 0.
x x
x x
x x
x x
44

150
6070
50
50 70 120 x1
x2
0
45
Na nacrtani graf treba unijeti
ograničenja tipa jednakosti, a
potom funkciju cilja u obliku
familije pravaca.

150
6070
50
50 70 120
2x1+2x2=140
x1
x2
0
Pravac prikazujemo samo u prvom kvadrantu gdje su
obje varijable pozitivne. Također, i preostala dva
pravca ćemo prikazati samo u prvom kvadrantu.
U ovom slučaju strelica
okrenuta u lijevo znači da se
radi o nejednadžbi oblika manje
ili jednako
46

150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
47

150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
3x1+x2=150
48
Nenegativnost varijabli x1 i x2 prikazana je strelicama. Kao presjek svih poluravnina
svih 5 ograničenja dobili smo skup S. S je skup dopustivih rješenja našeg problema.

150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
3x1+x2=150
S
49
150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
3x1+x2=150
S
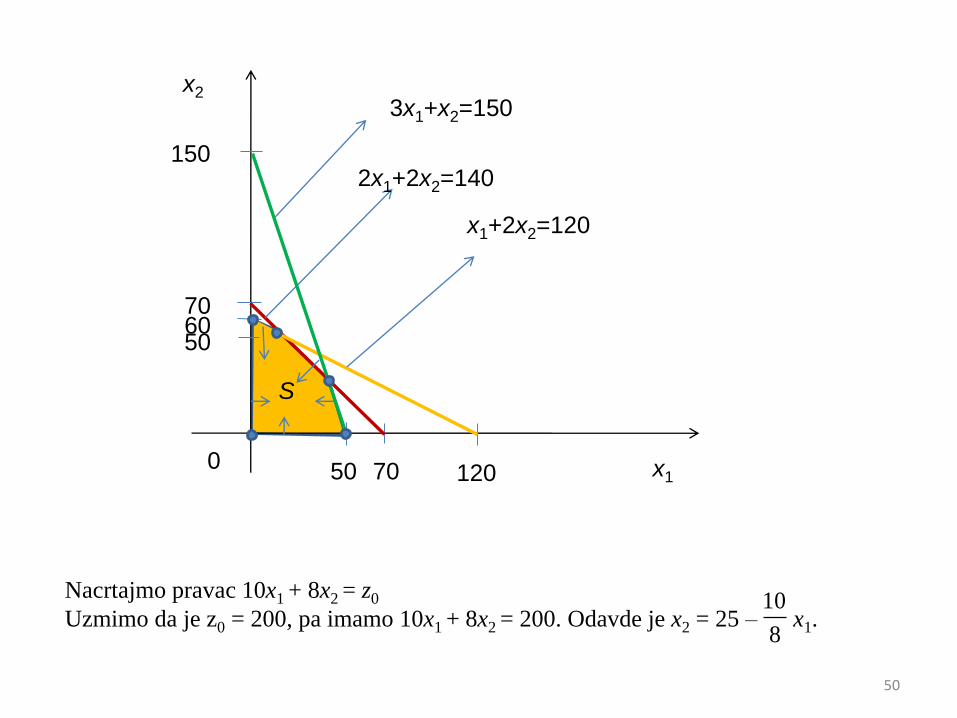
Nacrtajmo pravac 10x1 + 8x2 = z0
Uzmimo da je z0 = 200, pa imamo 10x1 + 8x2 = 200. Odavde je x2 = 25 – x1.
50
10
8
150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
3x1+x2=150
S
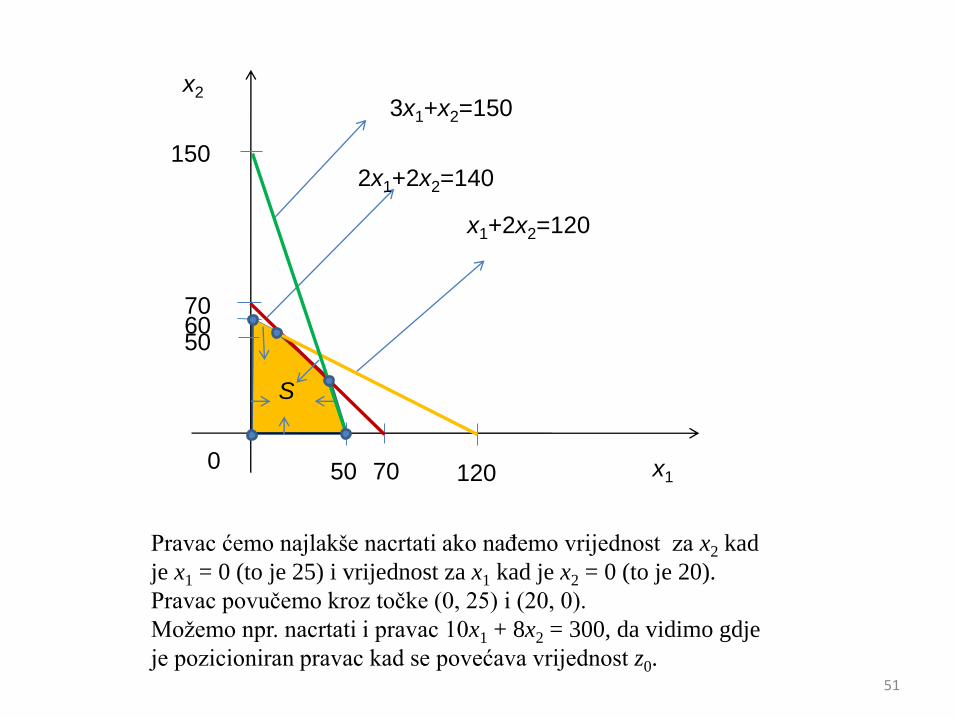
Pravac ćemo najlakše nacrtati ako nađemo vrijednost za x2 kad
je x1 = 0 (to je 25) i vrijednost za x1 kad je x2 = 0 (to je 20).
Pravac povučemo kroz točke (0, 25) i (20, 0).
Možemo npr. nacrtati i pravac 10x1 + 8x2 = 300, da vidimo gdje
je pozicioniran pravac kad se povećava vrijednost z0.51
150
6070
50
50 70 120
2x1+2x2=140
x1+2x2=120
x1
x2
0
3x1+x2=150
S10x1+8x2=200
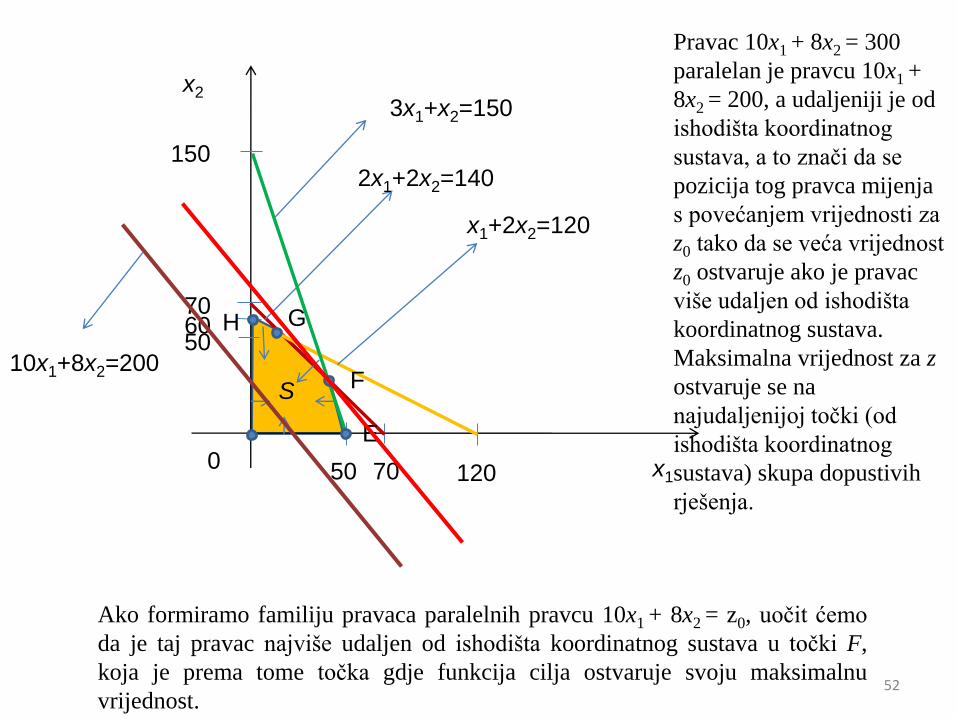
Ako formiramo familiju pravaca paralelnih pravcu 10x1 + 8x2 = z0, uočit ćemo
da je taj pravac najviše udaljen od ishodišta koordinatnog sustava u točki F,
koja je prema tome točka gdje funkcija cilja ostvaruje svoju maksimalnu
vrijednost.
F
E
GH
52
Pravac 10x1 + 8x2 = 300
paralelan je pravcu 10x1 +
8x2 = 200, a udaljeniji je od
ishodišta koordinatnog
sustava, a to znači da se
pozicija tog pravca mijenja
s povećanjem vrijednosti za
z0 tako da se veća vrijednost
z0 ostvaruje ako je pravac
više udaljen od ishodišta
koordinatnog sustava.
Maksimalna vrijednost za z
ostvaruje se na
najudaljenijoj točki (od
ishodišta koordinatnog
sustava) skupa dopustivih
rješenja.

Vrijednosti funkcije cilja u točkama E, F, G i H su sljedeće:
E(50, 0) = 500 $
F(40, 30) = 640 $
G(20, 50) = 600 $
H(0,60) = 480 $
Vrijednosti varijabli u točkama E, F, G i H nalazimo
rješavanjem sustava jednadžbi kojim je definirana dana točka
(svaka od tih točaka je nastala kao presjek dvaju pravaca).
Npr. točka F je presječna točka pravaca:
2x1+2x2=140
3x1+ x2=150.
Rješenje ovog sustava je x1=40 i x2=30 za koje funkcija
cilja ostvaruje svoju maksimalnu vrijednost.
53





























