Embed Size (px)
Citation preview
University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
DITAN: A TOOL FOR OPTIMAL SPACE TRAJECTORY DESIGN
Massimiliano Vasile
Department of Aerospace Engineering, Glasgow University, Glasgow
Ruediger Jehn
ESA/ESOC

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Outline
Introduction to DITAN
Study Cases What’s new? Final Remarks
Agenda

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
•DITAN (direct Interplanetary Trajectory Analysis) is a general purpose tool for the solution of optimal control problems.
•It implements a Direct Finite Elements Transcription (DFET) of the optimal control problem into a nonlinear programming problem (NLP)
•The solution of the resulting NLP is performed by the sparse SQP optimiser SNOPT
•The specific optimal control problem implemented in DITAN allows to design low-thrust multiple gravity assist trajectories.
Introduction to DITAN

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
• Developed under ESA/ESOC contract for low-thrust multiple gravity assist trajectories
• Open system for general trajectory design based on Direct Finite Element Transcription (DFET) and SSQP
• Fortran 77 code has SNOPT (source code) as NLP engine
• Several dynamic models, constraints and objectives can be implemented
• Automatic mesh grid adaptivity is included
Introduction to DITAN

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
DITAN: Software Logic
Dynamic Model
Algebraic
Constraints
Objective Function
DFET
Discretisation
Phase
Assembly
Boundary Constraints
NLP Solver
NLP Problem
First Guess OutputInput Post Processing
user
s/w core
external

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Direct Transcription by FET
• The Time domain is decomposed in finite elements leading to a polynomial development of the solution on spectral basis (Gauss Points)
t
x
t
xs
xbf
xbi
ts
Gauss
Point
Boundary
Nodes
Boundary gap b
),(11 iii
N
ittDD

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Direct Transcription by FET
• Differential constraints are expressed in weak form leading to discontinuities at boundaries
• High Integration order 2n = 2k+2
t
x
t
xs
xbf
xbi
ts
Gauss
Point
Boundary
Nodes
Boundary gap b
ft
t
bT
ft
t
T dt0
0
)( xxwFxw ˙

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Direct Transcription by FET
Optimal Control
ProblemDFET
NLP Problem
min J(y)
wherey=[x,u,ti ,tf]
T SSQP
Sparse Sequential
Quadratic
Programming
( )
l u
c y 0
b y b
l
iisiss
b
j
Tb
j
T
p
j
is
T
ikis
T
iki
q
i
l
t
!
˙
0)),(),((
02
)()()()(
)(
111
1
uxG
xwxwFwxw
yc

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Parametric Optimisation
f
i
t
t
f
b
f
b dtLtJ ),,(),,,( 0 puxpxx
0),,,( tpuxFx
0),,,( tpuxG
0),,,(0
0
ft
t
b
f
b tpxx
)J( min y
ul byb
yc 0)(
y=[xs,us,xb
0,xb
f,t0,tf,p]
DITAN allows the inclusion of a general set of real parameters and related constraint and objective functions
University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
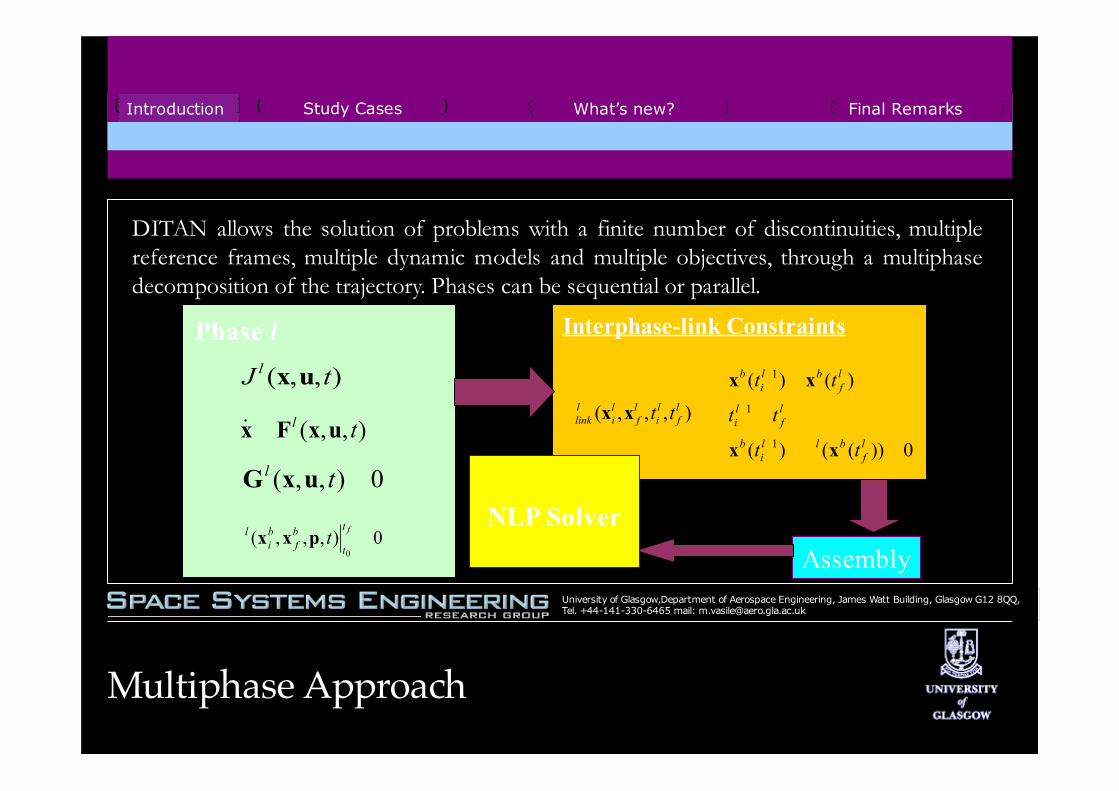
Multiphase Approach
),,( tJ l ux
Interphase-link Constraints
),,( tluxFx
0),,( tluxG
0))(()(
)()(
1
1
1
l
f
bll
i
b
l
f
l
i
l
f
bl
i
b
tt
tt
tt
xx
xx
),,,( l
f
l
i
l
f
l
i
l
link ttxx
Phase l
Assembly
NLP Solver0),,,(
0
ft
t
b
f
b
i
l tpxx
DITAN allows the solution of problems with a finite number of discontinuities, multiple reference frames, multiple dynamic models and multiple objectives, through a multiphase decomposition of the trajectory. Phases can be sequential or parallel.

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Examples of Applications
• Multiple swing-by low-thrust Trajectories:
– SOLO
– Bepi Colombo
– Europa
– Mars Exobiology
– Pluto Probe
– NEO Rendezvous
• Robustness Optimisation
– Optimal NEO interception and deviation
• Multiobjective and Pursuit-Evasion Problems
• Mars free-return Trajectories
• Moon WSB Transfers

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
SOLO and BepiColombo
• 3000 variables and constraints for the NLP problem
• 4 to 7 swingbys
• resonant orbits
• more than 20 switching points
Example of Matlab output for a BepiColombo Trajectory

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Europa
• 6000-7000 variables and constraints for the NLP problem
• 14 swingbys
• resonant orbits
• variable thrust
• Variable reference frames

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Pluto Probe
• 1000-7000 variables and constraints for the NLP problem
• parallel phases• multiple objectives• Multiple swingbys
Interplanetary trajectoryTwo parallel phases at Jupiter passage

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
NEO Rendezvous
• 1000-3000 variables ad constraints.
• Variable thrust and variable Isp
• Mean orbital elements for multispiral escape from the Earth

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Robustness Optimisation
• 1000-2000 variables and constraints
• multiple objectives• minimisation of the
uncertainties and of the expected value of the objective

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Multiobjective and Pursuit-Evasion Problems
• Zero-sum differential game
• Multiple objectives
• Reconstruction of the correct lagrangian multipliers of the optimal control problem

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Mars free-return Trajectories and Low-thrust Cyclers
• 200-4000 variables and constraints
• 1-14 swingbys
• Impulsive and low-thrust

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Moon WSB Transfers
• 1000-1500 variables and constraints
• Highly nonlinear and unstable dynamics
• Impulsive manoeuvres

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
New Features
New features:
Improved user interface: easier editing of the input files
New graphical user interface for trajectory representation
Transfer coast arcs can be analytically propagated: faster solution of MGA with chemical propulsion
Transfer arcs can be imported and edited

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
New Features
New features:
Extended database of celestial bodies: asteroids and comets database, updatable
New sets of boundary conditions: numerically or analytically propagated orbits
New set of objective functions: orbit insertion v with gravity losses, staging.
Atmospheric legs: aerocapture
Restricted three-body dynamics

University of Glasgow,Department of Aerospace Engineering, James Watt Building, Glasgow G12 8QQ, Tel. +44-141-330-6465 mail: [email protected]
Introduction What’s new?Study Cases Final Remarks
Final Remarks
DITAN has been effectively applied to the solution of many mission design problems.
A limitation exists on the maximum dimension of the problems that can be solved.
An improved NLP solver is required and it is under development at present
Since many problems have a hybrid structure (mixed integer-real variables) the new NLP is conceived to tackle hybrid problems.




























