Embed Size (px)
Citation preview

1
Distributed
Software Systems
Lecture 8Process-centric Computation
João Pedro Sousa
SWE 622
George Mason University
SWE 622 – Distributed Software Systems © Sousa, 2009
these few lectures:
different perspectives
on distributed computing:
access to services
communicating processes
data sharing
Lecture 8 – Process-centric Computation – 2

2
SWE 622 – Distributed Software Systems © Sousa, 2009
outline
understanding concurrency
modeling concurrent systems
FSP
predictability and consistency
synchronization
monitors
Lecture 8 – Process-centric Computation – 3
SWE 622 – Distributed Software Systems © Sousa, 2009
but same modeling & reasoning apply
c2
c1
c3
distributed
components (OS processes)threaded component
time
c1c2
c3
time
t1t2
t3
simultaneous processing interleaving
c1
t1
descdata code
desc
stackt3
desc
stack…
concurrent computations (aka events)
may occur in any order, unless explicit
steps are taken to synchronize them
Lecture 8 – Process-centric Computation – 4
3
SWE 622 – Distributed Software Systems © Sousa, 2009
aside
understanding threadswhy threads anyway?
separation of concerns:different activities in different threads
one thread remains responsive (e.g. user input)even if others are busy or blocked (e.g. waiting for messages)
support requests of multiple clients
using threads for replicated computation
pool: assign a thread when a request comes inmore efficient, harder to manage
factory: create a thread when a request comes ineasier to manage, less efficient
threads are supported by a library/VM, not the OS
making a process-blocking OS call blocks all threads
calling exit(i) in one thread terminates the process
Lecture 8 – Process-centric Computation – 5
SWE 622 – Distributed Software Systems © Sousa, 2009
the concurrent execution of two components/threads
generates all possible combinations of behavior
think of two components P and Q as state machines
if P has n states and j transitions
and Q has m states and k transitions,
the concurrent execution
has n*m states and j*k transitions
as the number of components grow
in a distributed system, this leads to
combinatorial explosion
Lecture 8 – Process-centric Computation – 6
4
SWE 622 – Distributed Software Systems © Sousa, 2009
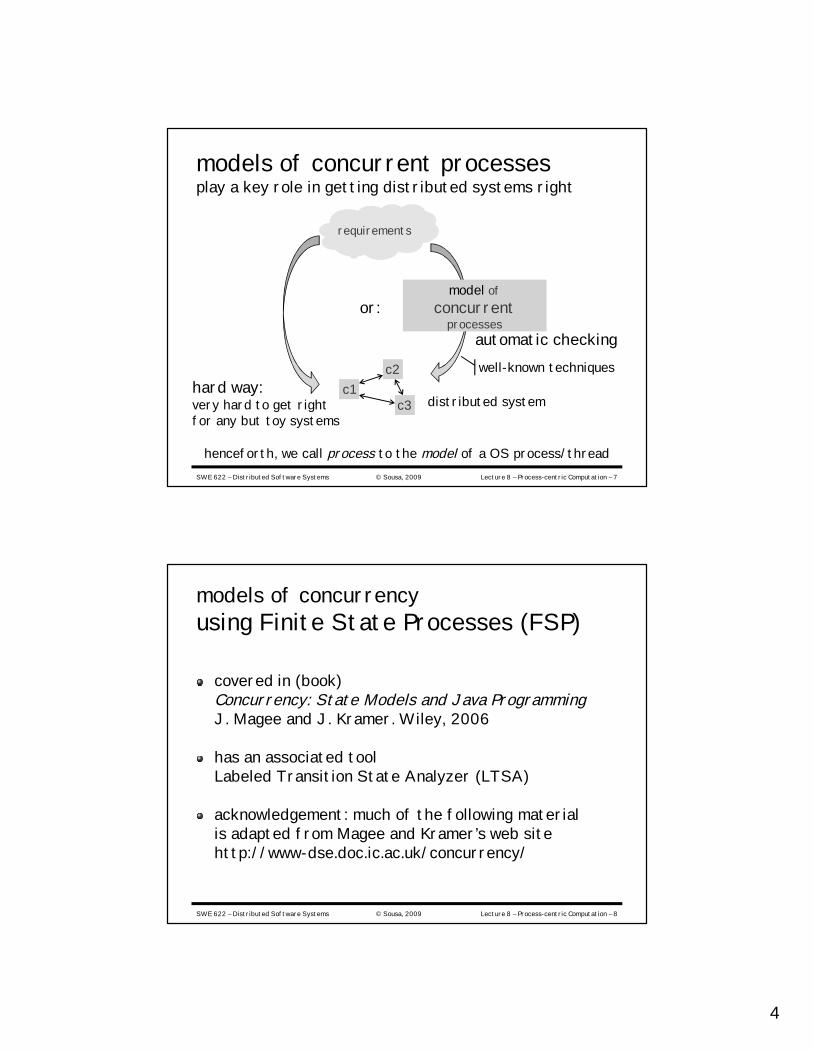
models of concurrent processesplay a key role in getting distributed systems right
hard way:very hard to get right
for any but toy systems
requirements
c2
c1
c3 distributed system
model of
concurrentprocesses
automatic checking
well-known techniques
or:
henceforth, we call process to the model of a OS process/thread
Lecture 8 – Process-centric Computation – 7
SWE 622 – Distributed Software Systems © Sousa, 2009
models of concurrency
using Finite State Processes (FSP)
covered in (book)
Concurrency: State Models and Java Programming
J. Magee and J. Kramer. Wiley, 2006
has an associated tool
Labeled Transition State Analyzer (LTSA)
acknowledgement: much of the following material
is adapted from Magee and Kramer’s web site
http://www-dse.doc.ic.ac.uk/concurrency/
Lecture 8 – Process-centric Computation – 8

5
SWE 622 – Distributed Software Systems © Sousa, 2009
two forms to describe a process
FSP: textual notation to describe processes
LTS: Labeled Transition Systems (graphical form)
process defines the execution
of a finite state machine
(x-> P) describes a process that initially
engages in the action x and then behaves
exactly as described by Pon
off
0 1
example: SWITCH = OFF,
OFF = (on -> ON),
ON = (off-> OFF).
Lecture 8 – Process-centric Computation – 9
SWE 622 – Distributed Software Systems © Sousa, 2009
LTSA generates graphical view
& executes the process
supports editing and parsing of FSP specs
the LTSA animator can be used to produce a trace
ticked actions are eligible for selection
in the LTS, the current state is highlighted in red
on
off
0 1
Lecture 8 – Process-centric Computation – 10

6
SWE 622 – Distributed Software Systems © Sousa, 2009
syntaxof textual form
I66 = OFF,
OFF = (key -> IDLE),
IDLE = (gas -> MOVING),
MOVING = (brake -> CRASHED),
CRASHED = END.local processes (states)
all caps
parenthesized
separated by commas
actions
lower case
there exist two predefined processes that allow no further action
STOP – failed termination
END – successful termination
no need to name every state in the textual representation:
I66 = (key -> gas -> brake -> END).
Lecture 8 – Process-centric Computation – 11
SWE 622 – Distributed Software Systems © Sousa, 2009
quizwhich of these are syntactically correct?
# Process Definition Answer
1 Boring = Stop.
2 BORING = STOP,
3 BORING = (STOP).
4 PERSON = birth -> death -> END.
5 PERSON = (Birth -> Death -> END).
6 PERSON = (birth -> (death -> END)).
7 PERSON = ((birth -> death -> END)).
8 PersoN = (bIRTh -> dEATh -> END).
9 PERSON = (birth -> birth -> NEXT).
Lecture 8 – Process-centric Computation – 12
7
SWE 622 – Distributed Software Systems © Sousa, 2009
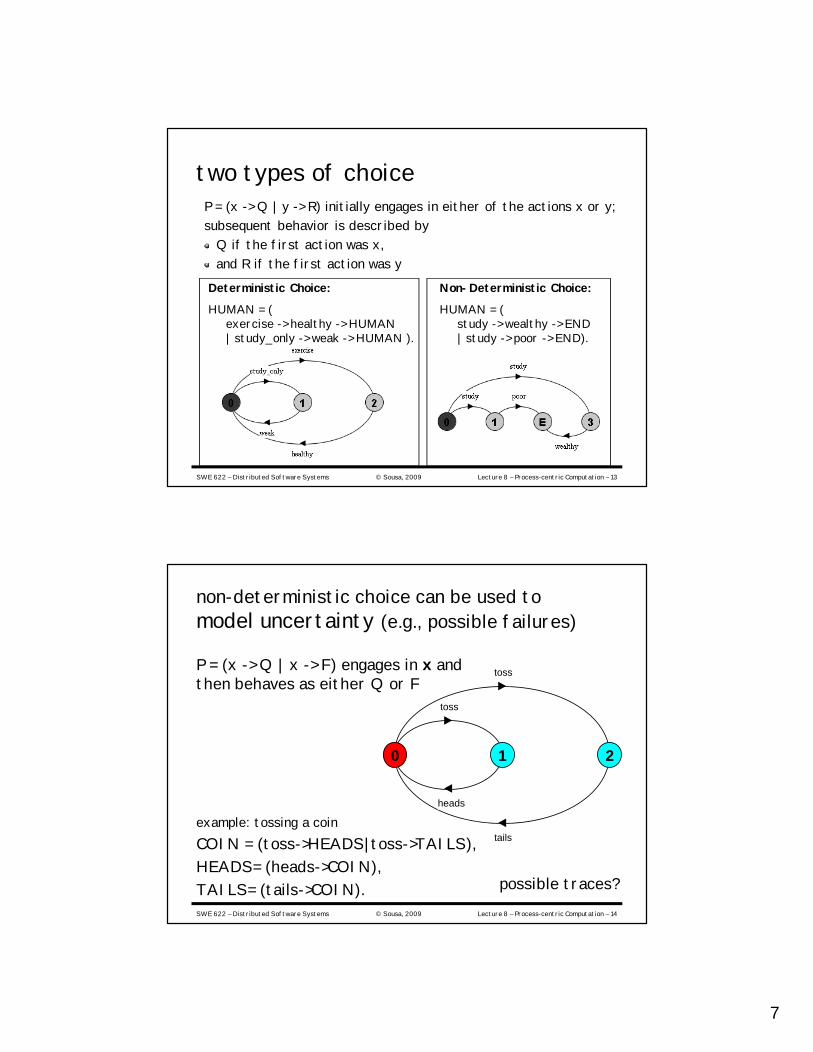
two types of choice
Deterministic Choice:
HUMAN = (
exercise -> healthy -> HUMAN
| study_only -> weak -> HUMAN ).
P = (x -> Q | y -> R) initially engages in either of the actions x or y;
subsequent behavior is described by
Q if the first action was x,
and R if the first action was y
Non-Deterministic Choice:
HUMAN = (
study -> wealthy -> END
| study -> poor -> END).
Lecture 8 – Process-centric Computation – 13
SWE 622 – Distributed Software Systems © Sousa, 2009
non-deterministic choice can be used to
model uncertainty (e.g., possible failures)
P = (x -> Q | x -> F) engages in x and
then behaves as either Q or F
example: tossing a coin
COIN = (toss->HEADS|toss->TAILS),
HEADS= (heads->COIN),
TAILS= (tails->COIN).
toss
toss
heads
tails
0 1 2
possible traces?
Lecture 8 – Process-centric Computation – 14

8
SWE 622 – Distributed Software Systems © Sousa, 2009
actions can be indexedindexes are always finite
same as
BUFF = (in[0]->out[0]->BUFF
|in[1]->out[1]->BUFF
|in[2]->out[2]->BUFF
|in[3]->out[3]->BUFF
).
example: a buffer with a single slot that
stores values in the range 0 to 3
BUFF = (in[i:0..3]->out[i]-> BUFF).
Lecture 8 – Process-centric Computation – 15
SWE 622 – Distributed Software Systems © Sousa, 2009
processes also can be indexed
const N = 3
range R = 0..N
STORE = BUF[0],
BUF[val:R] = (read[val] -> BUF[val]
| write[i:R] -> BUF[i] ).
STORE
{read, write}[0]
write[1]
write[2]
write[3]
write[0]
write[1]
write[2]
{read, write}[3]
write[0]
write[1]
{read, write}[2]
write[3]
write[0]
{read, write}[1]
write[2]
write[3]
0 1 2 3
Lecture 8 – Process-centric Computation – 16
9
SWE 622 – Distributed Software Systems © Sousa, 2009
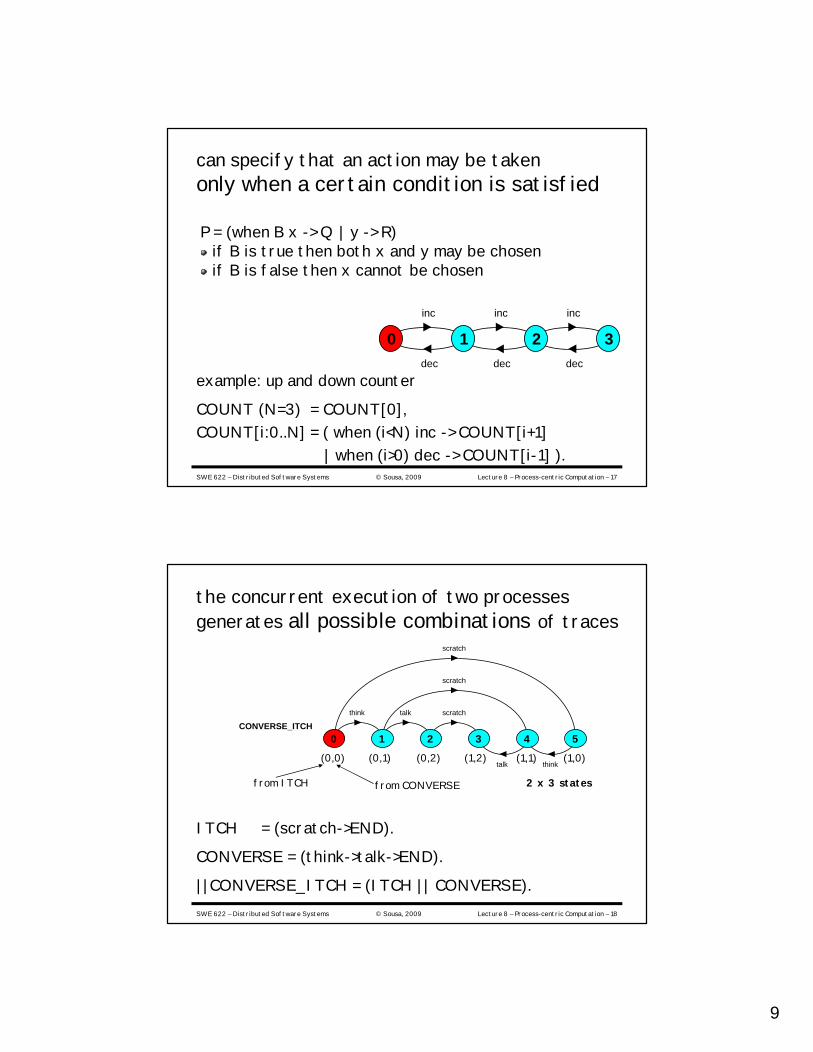
can specify that an action may be taken
only when a certain condition is satisfied
example: up and down counter
COUNT (N=3) = COUNT[0],
COUNT[i:0..N] = ( when (i<N) inc -> COUNT[i+1]
| when (i>0) dec -> COUNT[i-1] ).
inc inc
dec
inc
dec dec
0 1 2 3
P = (when B x -> Q | y -> R)
if B is true then both x and y may be chosen
if B is false then x cannot be chosen
Lecture 8 – Process-centric Computation – 17
SWE 622 – Distributed Software Systems © Sousa, 2009
the concurrent execution of two processes
generates all possible combinations of traces
ITCH = (scratch->END).
CONVERSE = (think->talk->END).
||CONVERSE_ITCH = (ITCH || CONVERSE).
(0,0) (0,1) (0,2) (1,2) (1,1) (1,0)
from CONVERSEfrom ITCH 2 x 3 states
CONVERSE_ITCH
scratch
think
scratch
talk scratch
talk think
0 1 2 3 4 5
Lecture 8 – Process-centric Computation – 18

10
SWE 622 – Distributed Software Systems © Sousa, 2009
concurrent processes
synchronize on shared events(events that are in the alphabet of both processes)
LTS? Traces? Number of states?
MAKER = (make->ready->MAKER).
USER = (ready->use->USER).
||MAKER_USER = (MAKER || USER).
[Magee & Kramer 06] pp 391
P –a–> P’ a∉αQ
P||Q –a–> P’||Q
Q –a–> Q’ a∉αP
P||Q –a–> P||Q’
P –a–> P’, Q–a–>Q’ a ≠ τ
P||Q –a–> P’||Q’
Lecture 8 – Process-centric Computation – 19
SWE 622 – Distributed Software Systems © Sousa, 2009
concurrent processes
synchronize on shared events
MAKER = (make->ready->MAKER).
USER = (ready->use->USER).
||MAKER_USER = (MAKER || USER).
Lecture 8 – Process-centric Computation – 20

11
SWE 622 – Distributed Software Systems © Sousa, 2009
concurrent processes
synchronize on shared events
MAKER = (make->ready->MAKER).
USER = (ready->use->USER).
||MAKER_USER = (MAKER || USER).
MAKER_USER
make ready make
use use
0 1 2 3
Lecture 8 – Process-centric Computation – 21
SWE 622 – Distributed Software Systems © Sousa, 2009
concurrent behavior quickly gets complex,
automated tools lend valuable help
MAKE_A = (makeA->ready->used->MAKE_A).
MAKE_B = (makeB->ready->used->MAKE_B).
ASSEMBLE = (ready->assemble->used->ASSEMBLE).
||MAKE_AB_FIRST = (MAKE_A||MAKE_B).
||FACTORY1 = (MAKE_AB_FIRST || ASSEMBLE).
||ASSEMBLE_A_FIRST = (MAKE_A||ASSEMBLE).
||FACTORY2 = (ASSEMBLE_A_FIRST||MAKE_B).
do ||FACTORY1 and ||FACTORY2
have the same behavior?
Lecture 8 – Process-centric Computation – 22

12
take 5
SWE 622 – Distributed Software Systems © Sousa, 2009 Lecture 8 – Process-centric Computation – 23
SWE 622 – Distributed Software Systems © Sousa, 2009
outline
understanding concurrency
modeling concurrent systems
FSP
predictability and consistency
synchronization
monitors
Lecture 8 – Process-centric Computation – 24
13
SWE 622 – Distributed Software Systems © Sousa, 2009
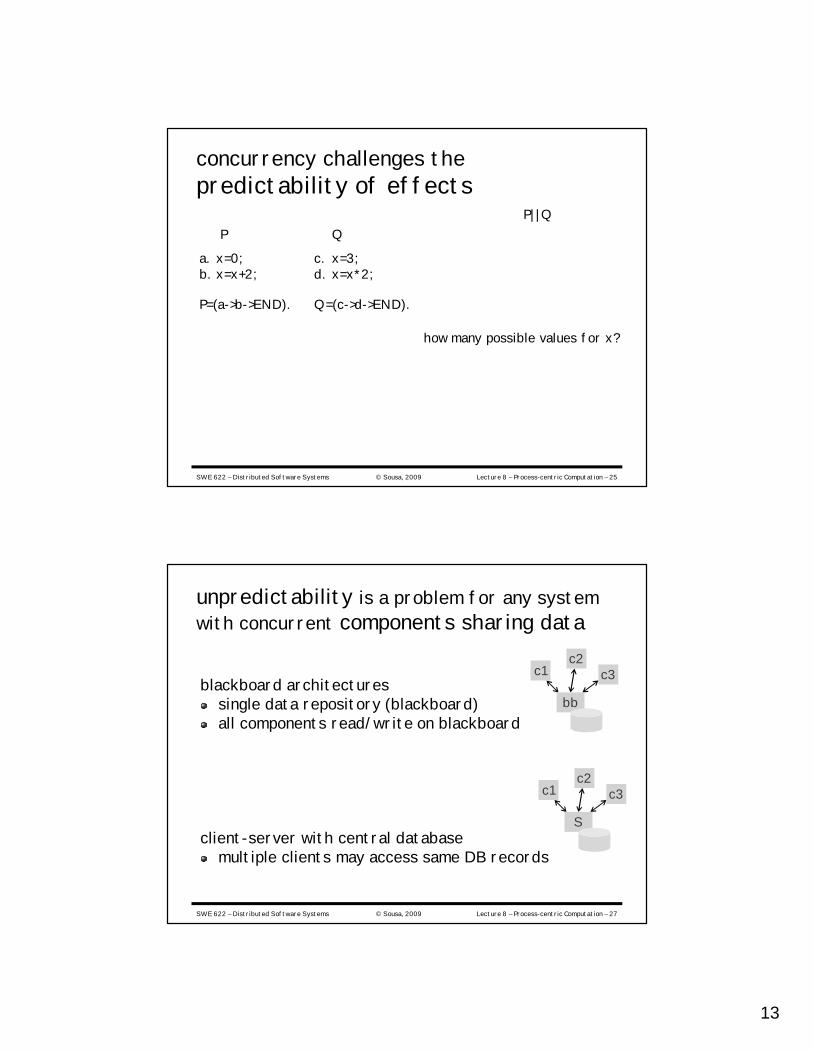
concurrency challenges the
predictability of effects
P Q
P||Q
x=0;
x=x+2;
x=3;
x=x*2;
a.
b.
P=(a->b->END).
c.
d.
Q=(c->d->END).
how many possible values for x?
Lecture 8 – Process-centric Computation – 25
SWE 622 – Distributed Software Systems © Sousa, 2009
unpredictability is a problem for any system
with concurrent components sharing data
blackboard architectures
single data repository (blackboard)
all components read/write on blackboard
client-server with central database
multiple clients may access same DB records
c2c1 c3
bb
c2c1 c3
S
Lecture 8 – Process-centric Computation – 27

14
SWE 622 – Distributed Software Systems © Sousa, 2009
distribution challenges the
consistency of observed values
distribution
network propagation delays
different clocks
causes inconsistency
given one trace of events, different components
may see those events in a different order
c2c1
write 2write 1
write 1write 2
Lecture 8 – Process-centric Computation – 28
SWE 622 – Distributed Software Systems © Sousa, 2009
concurrency
causes unpredictability
cannot tell which trace will occur
distribution
network propagation delays
different clocks
causes inconsistency
given one trace of events, different components
may see those events in a different order
Lecture 8 – Process-centric Computation – 29

15
SWE 622 – Distributed Software Systems © Sousa, 2009
synchronization techniques address both
predictability and ordering consistency
programmers need to use
explicit synchronization techniques anyway,because of unpredictability (due to concurrency)
explicit synchronization
relieves the middleware/OS from
having to assure ordering consistency
Lecture 8 – Process-centric Computation – 30
SWE 622 – Distributed Software Systems © Sousa, 2009
monitorsare used for explicit synchronization
monitors are used for:
synchronize (wait for) specific conditions
control access to shared data
mutual exclusion on critical sections
monitors
guaranty that only one process
operates on the monitor at one time
support a queue of processes that are waiting for
the shared resource, or
some condition to be true
Lecture 8 – Process-centric Computation – 31

16
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot[Magee & Kramer]
A controller only permits cars to enter
when the parking is not full,
and does not permit cars to leave
when there are no cars in the parking lot.
Lecture 8 – Process-centric Computation – 32
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
start by identifying structure and events
events or actions of interest?
arrival and departure
identify processes
arrivals, departures and CarPark control
define structure and interactions
ARRIVALS CARPARK
CONTROLDEPARTURESarrive depart
CarPark
Lecture 8 – Process-centric Computation – 33

17
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
model the processes in FSP
ARRIVALS = (arrive -> ARRIVALS).
DEPARTURES = (depart -> DEPARTURES).
||CARPARK = ( ARRIVALS || DEPARTURES
|| ).
Lecture 8 – Process-centric Computation – 34
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
model the processes in FSP
ARRIVALS = (arrive -> ARRIVALS).
DEPARTURES = (depart -> DEPARTURES).
CARPARKCONTROL(N=4) =
SPACES[N],
SPACES[i:0..N] = (when(i>0) arrive -> SPACES[i-1]
|when(i<N) depart -> SPACES[i+1]).
||CARPARK = ( ARRIVALS || DEPARTURES
|| CARPARKCONTROL(4) ).
Lecture 8 – Process-centric Computation – 35

18
SWE 622 – Distributed Software Systems © Sousa, 2009
class Arrivals extends Thread {
Arrivals(CarParkControl CPC) {
…}
void run() {
…
CPC.arrive();
…}
}
example: the parking lot
synchronization via shared object
class CarParkControl {
CarParkControl(…) {
…}
synchronized void arrive() {
…}
synchronized void depart() {
…}
}
class Departs extends Thread {
Departs(CarParkControl CPC) {
…}
void run() {
…
CPC.depart();
…}
}
Lecture 8 – Process-centric Computation – 36
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
translate the structure into Javaclass CarParkControl {
private int spaces;
private int capacity;
CarParkControl(int n)
{spaces = n; capacity = n;}
synchronized void arrive() {
while !(spaces > 0) wait();
--spaces;
}
synchronized void depart() {
while !(spaces < capacity) wait();
++spaces;
}
}
FSP Java
SPACES[i:0..N] private int spaces, capacity
arrive arrive()
depart depart()
guards synchronization conditions
CARPARKCONTROL(N=4) = SPACES[N],
SPACES[i:0..N] = (when(i>0) arrive -> SPACES[i-1]
|when(i<N) depart -> SPACES[i+1]).
Lecture 8 – Process-centric Computation – 37

19
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
insert Java monitor primitives
class CarParkControl {
private int spaces;
private int capacity;
CarParkControl(int n)
{spaces = n; capacity = n;}
synchronized void arrive() {
while !(spaces > 0) wait();
--spaces;
}
synchronized void depart() {
while !(spaces < capacity) wait();
++spaces;
}
}
Java
provides a wait queue per object
guaranties only one thread at a
time obtains the lock
Lecture 8 – Process-centric Computation – 38
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
insert Java monitor methods
class CarParkControl {
private int spaces;
private int capacity;
CarParkControl(int n)
{spaces = n; capacity = n;}
synchronized void arrive() {
while !(spaces > 0) wait();
--spaces;
}
synchronized void depart() {
while !(spaces < capacity) wait();
++spaces;
}
}
java.lang.Object.wait()
blocks the executing thread
until notified by another thread
what’s missing?Lecture 8 – Process-centric Computation – 39

20
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
insert Java monitor methods
class CarParkControl {
private int spaces;
private int capacity;
CarParkControl(int n)
{spaces = n; capacity = n;}
synchronized void arrive() {
while !(spaces > 0) wait();
--spaces;
notify();
}
synchronized void depart() {
while !(spaces < capacity) wait();
++spaces;
notify();
}
}
java.lang.Object.notify()
unblocks a single thread
waiting on this object’s queue
the unblocked thread must get the lock
Lecture 8 – Process-centric Computation – 40
SWE 622 – Distributed Software Systems © Sousa, 2009
example: the parking lot
easier to understand structure and behavior in FSP
class CarParkControl {
private int spaces;
private int capacity;
CarParkControl(int n)
{spaces = n; capacity = n;}
synchronized void arrive() {
while !(spaces > 0) wait();
--spaces;
notify();
}
synchronized void depart() {
while !(spaces < capacity) wait();
++spaces;
notify();
}
}
CARPARKCONTROL(N=4) = SPACES[N],
SPACES[i:0..N] = (when(i>0) arrive -> SPACES[i-1]
|when(i<N) depart -> SPACES[i+1]).
||CARPARK = ( ARRIVALS || DEPARTURES || CARPARKCONTROL(4) ).
class Arrivals extends Thread {
Arrivals(CarParkControl CPC) {
…}
void run() {
…
CPC.arrive();
…}
}class Departs extends Thread {
Departs(CarParkControl CPC) {
…}
void run() {
…
CPC.depart();
…}
}
Lecture 8 – Process-centric Computation – 41

21
SWE 622 – Distributed Software Systems © Sousa, 2009
discussion
modeling simple synchronization
design a security application to check visitors,
two checks run in parallel:
face recognition against a DB of known offenders
chemical analysis looks for dangerous substances
visitor is only cleared after both finish
Lecture 8 – Process-centric Computation – 42
SWE 622 – Distributed Software Systems © Sousa, 2009
class Barrier {
Barrier(
}
class A extends Thread {
A(Barrier s1, s2) {…}
void run() {
dothis();
s1.ready();
dothat();
s2.ready(); …}
}
discussion
barriers support simple synchronization
class B extends Thread {
B(Barrier s1, s2) {…}
void run() {
sing();
s1.ready();
dance();
s2.ready(); …}
}
A = (dothis -> synch1 -> dothat -> synch2-> END).
B = (sing -> synch1 -> dance -> synch2 -> END).
||AB = ( A || B ).
Lecture 8 – Process-centric Computation – 44





























