Embed Size (px)
Citation preview

DistributedMarkov Chains
Ratul SahaNational University of Singapore
Joint work with:Javier Esparza, Sumit K. Jha,Madhavan Mukund, and P. S. Thiagarajan

THE MODEL
.DistributedMarkov Chains (DMC)
→ Network of communicating probabilistictransition systems
→ Synchronize on shared actions
→ Followed by joint probabilistic move
→ Key restriction: no two enabledsynchronizations will involve the same agent
→ Enforced syntactically (will explain soon)
→ Efficient model checking using aninterleaved semantics
..3

.DMC: Synchronization
→ Joint probabilistic move after thesynchronization action
....
Agent 1
.s1 .
s′1
.
s′′1
..
Agent 2
. s2.
s′2
.
s′′2
. a....0.2
....0.8
..
..4
.DMC: Key Restriction
→ Any two simultaneously enabled actionsinvolve disjoint sets of agents
→ Syntactically, local state uniquelydetermines its communicating partners
..5
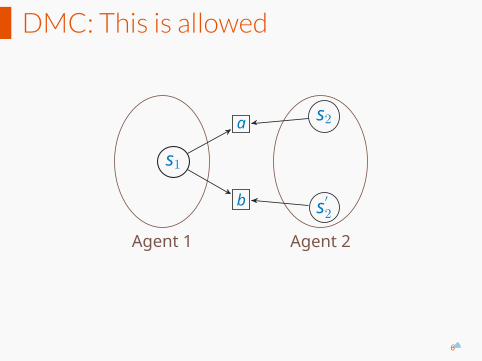
.DMC: This is allowed
....
Agent 1
.s1 ..
Agent 2
.
s2
.
s′2
.
b
.
a
....
..6
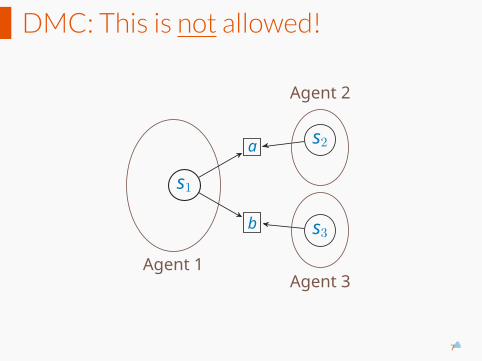
.DMC: This is not allowed!
....
Agent 1
.s1 .
s2
.
s3
.
b
.
a
......
Agent 2
..
Agent 3
..7

.DMC: Events
→ Event: One synchronization is executed at atime, followed by a probabilistic move by theparticipating agents
..s1. s2.
0.3
.
0.2
.
0.5
..
a
.
s′1
.
s′2
.
s′′1
.
s′′2
.
s′′′1
.
s′′′2
............
e = ((s1, s2),a, (s′
1, s′
2)) is an event, pe = 0.3
..8
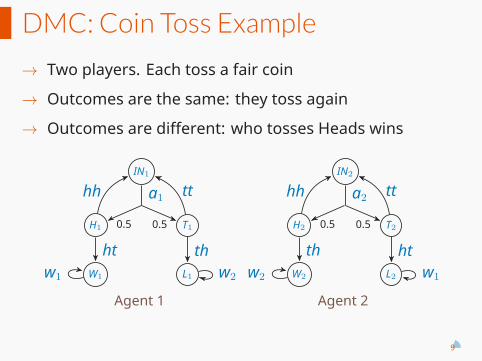
.DMC: Coin Toss Example
→ Two players. Each toss a fair coin
→ Outcomes are the same: they toss again
→ Outcomes are different: who tosses Heads wins
..H1
.
IN1
..
W1
. T1.
L1
. 0.5. 0.5.a1
.ht
.hh
.
w1
.th
.tt
.
w2
Agent 1
..H2
.
IN2
..
W2
. T2.
L2
. 0.5. 0.5.a2
.th
.hh
.
w2
.ht
.tt
.
w1
Agent 2
..9

.Global Transition System
→ Associate a global transition system basedon event occurrences
→ This is interleaved semantics
..10

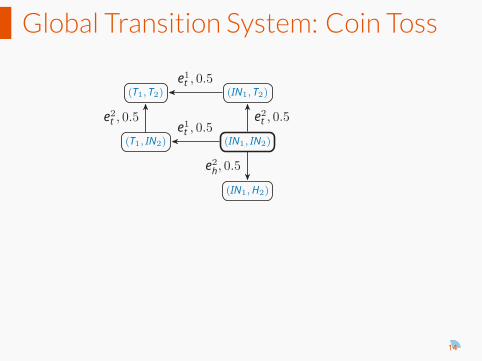
.Global Transition System: Coin Toss
..agent 1 tossing T..
(T1, IN2)
.
(IN1, IN2)
...
e1t , 0.5
..11

.Global Transition System: Coin Toss
..agent 1 tossing T. (IN1, T2). agent 2 tossing T.
(T1, IN2)
.
(IN1, IN2)
.....
e1t , 0.5
.e2t , 0.5
..12

.Global Transition System: Coin Toss
..(T1, T2). (IN1, T2)..
(T1, IN2)
.
(IN1, IN2)
. e1t , 0.5.
e1t , 0.5
.e2t , 0.5
.e2t , 0.5
..13
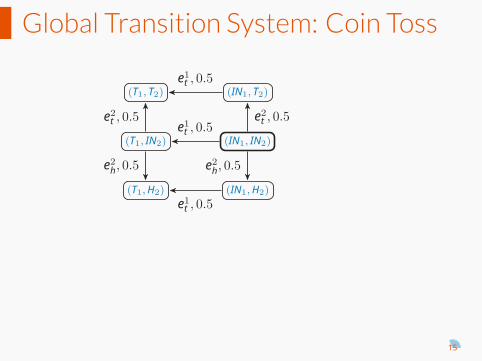
.Global Transition System: Coin Toss
..(T1, T2). (IN1, T2).
(T1, IN2)
.
(IN1, IN2)
.
(IN1,H2)
. e1t , 0.5.
e1t , 0.5
.e2t , 0.5
.e2t , 0.5
.
e2h, 0.5
..14
.Global Transition System: Coin Toss
..(T1, T2). (IN1, T2).
(T1, IN2)
.
(IN1, IN2)
.
(T1,H2)
.
(IN1,H2)
. e1t , 0.5.
e1t , 0.5
.
e1t , 0.5
.e2t , 0.5
.e2t , 0.5
.
e2h, 0.5
.
e2h, 0.5
..15

.Global Transition System: Coin Toss
..(T1, T2). (IN1, T2). (H1, T2).
(T1, IN2)
.
(IN1, IN2)
.
(H1, IN2)
.
(T1,H2)
.
(IN1,H2)
.
(H1,H2)
.
(both agents tossed)
. e1t , 0.5.
e1t , 0.5
.
e1t , 0.5
. e1h, 0.5.
e1h, 0.5
.
e1h, 0.5
.e2t , 0.5
.e2t , 0.5
.e2t , 0.5
.
e2h, 0.5
.
e2h, 0.5
.
e2h, 0.5
..16

.Global Transition System: Coin Toss
..(T1, T2). (IN1, T2). (H1, T2).
(T1, IN2)
.
(IN1, IN2)
.
(H1, IN2)
.
(T1,H2)
.
(IN1,H2)
.
(H1,H2)
.
(L1,W2)
. (W1, L2).
(full global transition system)
.ett
.
ehh
. e1t , 0.5.
e1t , 0.5
.
e1t , 0.5
. e1h, 0.5.
e1h, 0.5
.
e1h, 0.5
. eht.
eth
.
ew1
.
ew2
.e2t , 0.5
.e2t , 0.5
.e2t , 0.5
.
e2h, 0.5
.
e2h, 0.5
.
e2h, 0.5
(unmarked events have probability 1)
..17

.The Trajectory Space
→ We refer to paths in TS as trajectories
→ We wish to reason about the behavior of thesystem using the interleaved semantics
Problem: It is hard to define a probabilitymeasure over the set of maximal trajectories
..18

.The Trajectory Space
Due to mix of concurrency and stochasticity,TS is not a Markov chain in general
... (IN1, T2)..
(T1, IN2)
.
(IN1, IN2)
.
(H1, IN2)
.
(IN1,H2)
.
e1t , 0.5
.
e1h, 0.5
.e2t , 0.5
.
e2h, 0.5
Here, the sum of the probabilities of thetransitions from the state (IN1, IN2) is 2
..19
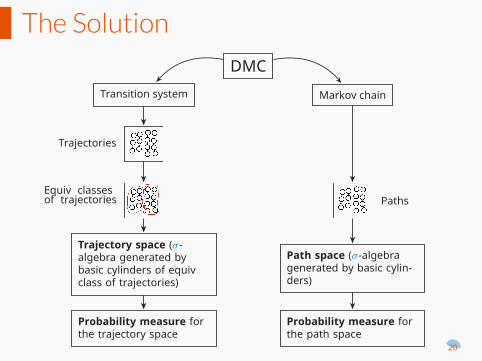
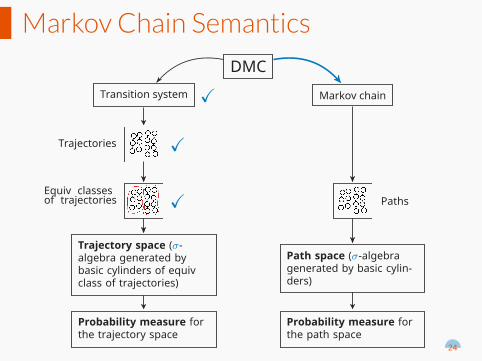
.The Solution..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.........
..20

.Equivalence Classes of Trajectories..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.........
..21

. Independence over Events
... (IN1, T2)..
(T1, IN2)
.
(IN1, IN2)
.
(H1, IN2)
.
(IN1,H2)
.
e1t , 0.5
.
e1h, 0.5
.e2t , 0.5
.
e2h, 0.5
→ e1t I e2h — agent 1 tossing tail and agent 2tossing head are independent
..22

.Equivalence over Event Sequences
... (IN1, T2)..
(T1, IN2)
.
(IN1, IN2)
.
(H1, IN2)
.
(T1,H2)
.
(IN1,H2)
.
e1t , 0.5
.
e1t , 0.5
.
e1h, 0.5
.e2t , 0.5
.
e2h, 0.5
.
e2h, 0.5
→ [e1t e2h] = {e1t e2h, e2he
1t }— equivalence class over
event sequences→ Lifts to equivalence over trajectories
..23
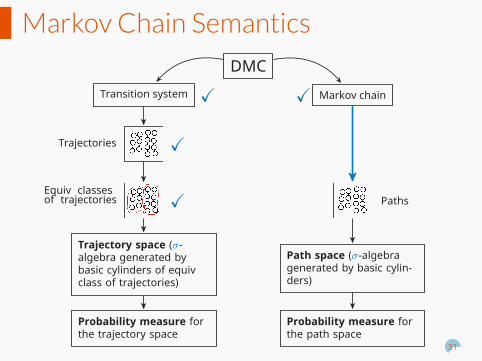
.Markov Chain Semantics..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.........
..24

.Markov Chain Semantics
→ A step at a global state is a maximal set ofindependent enabled events
→ The transition relation using steps induces aMarkov chain
..25

.Markov Chain Semantics
... (IN1, T2)..
(T1, IN2)
.
(IN1, IN2)
.
e1t , 0.5
.e2t , 0.5 ⇒
..(T1, T2)...
(IN1, IN2)
.
{e1t , e2t }, 0.25
→ {e1t , e2t } is a maximal step at (IN1, IN2)
→ The probability of a step is the product ofprobabilities associated with the events inthe step
..26

.Markov Chain Semantics
..(T1, T2). (T1,H2). (H1,H2). (H1, T2).
(IN1, IN2)
.
{e1t , e2t }, 0.25
.
0.25
.
0.25
.
0.25
The maximal steps at (IN1, IN2) are{e1h, e
2h}, {e
1h, e
2t }, {e1t , e2h}, {e
1t , e2t }
..27

.Coin Toss: Global Markov Chain
..(T1, T2). (T1,H2). (H1, T2). (H1,H2).
(IN1, IN2)
.
(L1,W2)
.
(W1, L2)
.
0.25
.
0.25
.
0.25
.
0.25
......
(The unmarked transitions have probability 1)
..28

.Coin Toss: Global Markov Chain
What if there were k players?
..(T1, T2, · · · , Tk). (H1, · · · ,Hk−1,Hk).
(H1, T2, · · · , Tk)
. · · ·.
(H1, · · · ,Hk−1, Tk)
.
· · ·
.
(IN1, IN2, · · · , INk)
.
12k
.
12k
.
12k
.
12k
..
k parallel probabilistic moves generate 2k
global transitions..29

.Markov Chain Semantics
The number of transitions out of a globalstate can be (in number of agents)
exponentialin Markov chain
semantics⇒
polynomialin interleavedsemantics
..30
.Markov Chain Semantics..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.
✓
.........
..31

.Markov Chain Semantics..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.
✓
.
✓
.
✓
.
✓
.........
..32

.Defining the ProbabilityMeasure..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.
✓
.
✓
.
1-1 correspondence
.........
..33

.Defining the ProbabilityMeasure..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.
✓
.
1-1 correspondence
..........
..34

.Defining the ProbabilityMeasure..DMC.
Transition system
.
Markov chain
...
Path space (σ-algebragenerated by basic cylin-ders)
.
Probability measure forthe path space
..
Trajectory space (σ-algebra generated bybasic cylinders of equivclass of trajectories)
.
Probability measure forthe trajectory space
.
Trajectories
.
Equiv classes
.
of trajectories
.
Paths
.
✓
.
✓
.
✓
.
✓
.
✓
.
1-1 correspondence
..........
..35

THE MODELCHECKING

.PBLTL⊗: The Specification Logic
Local Bounded LTL (BLTLi)→ Time bounded LTL
→ Each agent i has a local set of atomic propositions APi
→ Formula of type i: ap ∈ APi | ¬φ | φ1 ∨ φ2 | φ1Uki φ2
→ φ1Uki φ2 — Until holds within k (local) moves of
agent i
Product Bounded LTL (BLTL⊗)→ Boolean combinations of {BLTLi} formulas
..37
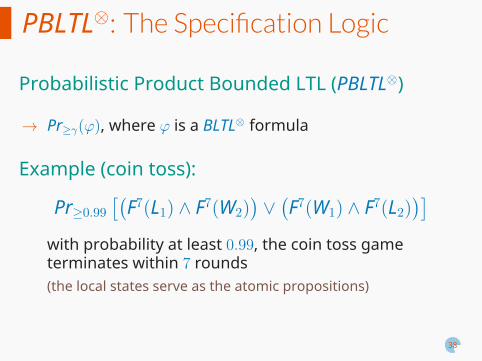
.PBLTL⊗: The Specification Logic
Probabilistic Product Bounded LTL (PBLTL⊗)
→ Pr≥γ(φ), where φ is a BLTL⊗ formula
Example (coin toss):
Pr≥0.99
[(F7(L1) ∧ F7(W2)
)∨(F7(W1) ∧ F7(L2)
)]with probability at least 0.99, the coin toss gameterminates within 7 rounds(the local states serve as the atomic propositions)
..38

.Statistical Model Checking
→ Given a DMC and PBLTL⊗ formula Pr≥γ(φ)
→ Explicit computation is impractical for verylarge systems
→ Instead, estimate through sampling
→ Draw sample trajectories from the interleavedsemantics
→ Use statistical estimation: returns“γ in (predefined) interval (a,b)”with high confidence
..39

.Experimental Results
→ Modeled a number of PRISM benchmarksincluding:
(i) Distributed leader election protocol[Itai and Rodeh]
(ii) A randomized solution to the diningPhilosophers problem [Pnueli and Zuck]
→ Compared simulation time with a statisticalmodel checker — PLASMA
..40

.Distributed Leader Election
→ Verify: with probability 1, a leader is electedeventually
→ Since specification logic is BLTL⊗ and theverification procedure is SMC, we insteadverify:
In a ring of N nodes, with high probability(p), a leader will be elected within B rounds
(Type I and II error = 0.01, indifference region =0.01, for various choices of N and B)
..41

.Distributed Leader Election:Comparison with PLASMAp = 0.99, N up to 1000 (no parallelization in DMC)
..42

.Dining Philosophers Problem→ To start, a philosopher probabilistically
chooses the order in which it will try theforks
→ Forks between philosophers are also agentsin DMC formalism
→ We use deterministic round robin protocolto simulate shared variable
→ The property we verify:With high probability (p), every philosophereats within B rounds
..43

.Dining Philosophers Problem:Comparison with PLASMAp = 0.95, N up to 500 (no parallelization in DMC)
..44

FUTURE WORK
.FutureWork and Challenges
→ Other case studies from PRISM benchmark
→ Finding large systems with deterministicsynchronizations
→ Extend SMC procedure to a parallelimplementation
→ Generating independent samples in parallel
→ Redefining SMC parameters
..46

.FutureWork and Challenges
→ Use in other variations of probabilisticmodels
→ Currently building a probabilistic version ofnegotiation model
→ Reduction rules for new properties
→ Model systems with observable andnon-observable components
→ Model (non-)observable components ascommunicating agents
→ Predict behavior of non-observable agents
..47

.FutureWork and Challenges
→ Other application domains
→ Distributed decision making in robotics
→ Software model checking, Workflow systems
→ Exact probabilistic verification
→ PCTL and other probabilistic temporal logics
→ Devising new model checking algorithms
..48

THANK YOU!





























![Approximating Markovchains - PNASFor deterministic and stochastic discrete-time processes, support onsome interval [A, B], I defineapproximating(m, r) Markovchains.Thesechains are](https://img.dokumen.tips/doc/110x75/5f3f57bd7cac921b7c580d2c/approximating-markovchains-pnas-for-deterministic-and-stochastic-discrete-time.jpg)