Embed Size (px)
Citation preview
DISSEÑO E IMPLEMENTACIÓN DE UN DIVISOR DE POTENCIA EN BANDA DUAL CON ESTRUCTURAS METAMATERIALES
BASADAS EN CSRRs
Memoria del Trabajo Final de Carrera de Ingeniería de Telecomunicación
Realizado por Jordi Garcia Rincón y dirigido por Ferran Martín y Jordi Bonache Bellaterra, 14 de Septiembre de 2007

Escola Tècnica Superior d’Enginyeria
Els sotasignats, Ferran Martín i Jordi Bonache
Professors de l'Escola Tècnica Superior d'Enginyeria de la UAB,
CERTIFICA:
Que el treball a què correspon aquesta memòria ha estat realitzat sota la seva direcció per en Jordi Garcia Rincón
I per tal que consti firma la present.
Signat: ............................................ Signat: ............................................
Bellaterra, 14 de Setembre de 2007
Índice de títulos
Capítulo 1 – Introducción........................................................................................................ 6
1.1. Introducción a los Metamateriales .................................................................................. 7
1.1.1. Medios con permeabilidad magnética y permitividad dieléctrica negativas.......... 10
1.2. Líneas de transmisión convencional (RHM)................................................................. 13
1.2.1. Caso general ........................................................................................................... 13
1.2.2. Caso sin pérdidas.................................................................................................... 16
1.3. Líneas de transmisión metamaterial .............................................................................. 19
1.3.1. Línea de transmisión zurda (LHM)........................................................................ 19
1.3.2. Línea de transmisión dual o compuesta (CLRH TL) ............................................. 20
1.3.3. Líneas basadas en el modelo resonante.................................................................. 23
1.3.3.1. Líneas basadas en resonadores de anillos abiertos (SRRs) ............................. 24
1.3.3.2. Líneas basadas en resonadores de anillos abiertos complementarios (CSRRs)
...................................................................................................................................... 25
1.4. Referencias .................................................................................................................... 26
Capítulo 2 - Diseño de dispositivos en banda dual con líneas de transmisión
metamaterial ........................................................................................................................... 28
2.1. Principio de funcionamiento de los dispositivos en banda dual implementados con
líneas de transmisión metamaterial ...................................................................................... 29
2.2. Diseño de inversores de impedancias basados en CSRRs operativos en banda dual ... 32
2.3. Referencias .................................................................................................................... 38
Capítulo 3 – Aplicación al diseño de un divisor de potencia en banda dual ..................... 39
3.1. Introducción a los divisores de potencia ....................................................................... 39
3.1.1. Divisores de potencia implementados con inversores de impedancias.................. 42
3.2. Diseño de un divisor de potencia en banda dual mediante líneas metamateriales
basadas en CSRRs................................................................................................................ 44
3.3. Caracterización.............................................................................................................. 48
3.4. Referencias .................................................................................................................... 50
Capítulo 4 – Conclusiones...................................................................................................... 51
1
Índice de figuras Figura 1-1 – Clasificación de los materiales en función del signo de ε y μ. .............................. 8
Figura 1-2 – Relación E, H y k para un medio LHM (a) y un medio convencional RHM (b). . 9
Figura 1-3 – Refracción de las ondas EM en la superficie de contacto entre dos medios iguales
(a) y entre un medio RH y otro LH (b). ..................................................................................... 9
Figura 1-4 – Lente convencional (a) y lente implementada con metamateriales (b). .............. 10
Figura 1-5 – Detalle de un SRR. .............................................................................................. 11
Figura 1-6 – Configuración tridimensional basada en SRRs e hilos de un medio zurdo......... 12
Figura 1-7 – Material creado por Pendry y Smith con ε y μ negativas.. .................................. 12
Figura 1-8 - Modelo circuital de línea de transmisión convencional sin pérdidas (diestra). ... 13
Figura 1-9 - Equivalente a celda básica de una línea de transmisión....................................... 14
Figura 1-10 – Matrices de parámetros ABCD de impedancia serie y admitancia paralelo. .... 14
Figura 1-11 - Modelo discreto de una línea de transmisión convencional sin pérdidas. ......... 16
Figura 1-12 - Caso particular de modelo discreto de línea de transmisión convencional sin
pérdidas. ................................................................................................................................... 18
Figura 1-13 - Diagrama de dispersión de la celda mostrada en la figura 1-12. ...................... 18
Figura 1-14 - Modelo discreto de una línea de transmisión zurda sin pérdidas....................... 19
Figura 1-15 - Diagrama de dispersión de la celda mostrada en la figura 1-14. ...................... 19
Figura 1-16 - Modelo discreto de una línea de transmisión dual o compuesta sin pérdidas.... 20
Figura 1-17 – Diagrama de dispersión para el caso balanceado (a) y para el caso no
balanceado (b). ......................................................................................................................... 23
Figura 1-18 – Ambas caras de un prototipo de estructura metamaterial CPW. En la cara
superior se observa el medio de hilos mientras que en la inferior hay grabados los SRRs. .... 24
Figura 1-19 – Topología del SRR y del CSRR. ....................................................................... 25
Figura 1-20 – Línea de transmisión LHM basada en CSRRs (a). Modelo discreto de un CSRR
acoplado como se muestra en la figura a (b). ........................................................................... 26
Figura 2-1 – Ejemplo de relación de dispersión para línea CRLH en el caso no balanceado.. 29
Figura 2-2 – Ejemplo de relación de dispersión para línea CRLH en caso no balanceado con
distintas regiones zurdas sin que haya modificación en la región diestra. ............................... 30
Figura 2-3 – Layout en Momentum de un inversor de impedancias basado en CSRR operativo
en banda dual............................................................................................................................ 33
Figura 2-4 – Resultados obtenidos al simular el layout mostrado en la figura 2-4.................. 35
2
Figura 2-5 – Layout del inversor de impedancias basado en un CSRR operativo en banda
dual. .......................................................................................................................................... 37
Figura 2-6 – Respuesta del inversor diseñado cuyo layout se muestra en la figura 2-5. ......... 38
Figura 3-1 – Ejemplo de divisores de potencia de tres puertos en T. ...................................... 41
Figura 3-2 – Divisor de potencia mediante líneas de transmisión. .......................................... 42
Figura 3-3 – Circuito a analizar para hallar la impedancia de entrada en el puerto 1.............. 43
Figura 3-4 – Circuito a analizar para hallar el parámetro de transmisión entre el puerto 1 y los
puertos 2 o 3. ............................................................................................................................ 43
Figura 3-5 – Layout final del divisor de potencia en banda dual basado en CSRRs. .............. 45
Figura 3-6 – Ampliación de la interconexión de los inversores y línea de acceso principal. .. 45
Figura 3-7 – Resultados obtenidos tras la simulación del layout del divisor de potencia........ 46
Figura 3-8 – Layout de los inversores que implementan el divisor de potencia. ..................... 47
Figura 3-9 – Divisor de potencia. Cara superior (a) y cara inferior (b). .................................. 48
Figura 3-10 – Resultado de las mediciones realizadas al divisor de potencia. ........................ 49
Figura 3-11 – Resultado de las mediciones realizadas al divisor de potencia superpuestos a los
obtenidos con la simulación. .................................................................................................... 50
3
Índice de ecuaciones y cálculos Ecuación (1.1) ............................................................................................................................ 7
Ecuación (1.2) ............................................................................................................................ 9
Ecuación (1.3) .......................................................................................................................... 10
Ecuación (1.4) .......................................................................................................................... 14
Ecuación (1.4) .......................................................................................................................... 14
Ecuación (1.5) .......................................................................................................................... 15
Ecuación (1.6) .......................................................................................................................... 15
Ecuación (1.7) .......................................................................................................................... 15
Ecuación (1.8) .......................................................................................................................... 15
Ecuación (1.9) .......................................................................................................................... 15
Ecuación (1.10) ........................................................................................................................ 15
Ecuación (1.11) ........................................................................................................................ 15
Ecuación (1.12) ........................................................................................................................ 15
Ecuación (1.13) ........................................................................................................................ 16
Ecuación (1.14) ........................................................................................................................ 16
Ecuación (1.15) ........................................................................................................................ 16
Ecuación (1.16) ........................................................................................................................ 16
Ecuación (1.17) ........................................................................................................................ 16
Ecuación (1.18) ........................................................................................................................ 17
Ecuación (1.19) ........................................................................................................................ 17
Ecuación (1.20) ........................................................................................................................ 17
Ecuación (1.21) ........................................................................................................................ 17
Ecuación (1.22) ........................................................................................................................ 17
Ecuación (1.23) ........................................................................................................................ 17
Ecuación (1.24) ........................................................................................................................ 18
Ecuación (1.25) ........................................................................................................................ 18
Ecuación (1.26) ........................................................................................................................ 20
Ecuación (1.27) ........................................................................................................................ 21
Ecuación (1.28) ........................................................................................................................ 21
Ecuación (1.29) ........................................................................................................................ 21
Ecuación (1.30) ........................................................................................................................ 22
Ecuación (2.1) .......................................................................................................................... 28
4
Ecuación (2.2) .......................................................................................................................... 28
Ecuación (2.3) .......................................................................................................................... 31
Ecuación (2.4) .......................................................................................................................... 31
Ecuación (2.5) .......................................................................................................................... 31
Ecuación (2.6) .......................................................................................................................... 31
Ecuación (2.7) .......................................................................................................................... 32
Ecuación (2.8) .......................................................................................................................... 34
Ecuación (2.9) .......................................................................................................................... 34
Ecuación (2.10) ........................................................................................................................ 35
Ecuación (3.1) .......................................................................................................................... 39
Ecuación (3.2) .......................................................................................................................... 40
Ecuación (3.3) .......................................................................................................................... 40
Ecuación (3.4) .......................................................................................................................... 40
Ecuación (3.5) .......................................................................................................................... 40
Ecuación (3.6) .......................................................................................................................... 40
Ecuación (3.7) .......................................................................................................................... 41
Ecuación (3.8) .......................................................................................................................... 41
Ecuación (3.9) .......................................................................................................................... 41
Ecuación (3.10) ........................................................................................................................ 42
Ecuación (3.11) ........................................................................................................................ 43
Ecuación (3.12) ........................................................................................................................ 43
Ecuación (3.13) ........................................................................................................................ 44
Ecuación (3.14) ........................................................................................................................ 44
5
Introducción
Capítulo 1 – Introducción
La tecnología es una ciencia que está sujeta a continuos avances. Frecuentemente
surgen nuevas tecnologías que son estudiadas por científicos, ingenieros y tecnólogos de
distintos ámbitos. Algunas de ellas prosperarán y aportarán beneficios a la sociedad en que
vivimos. Por contra, otras se quedarán por el camino y se olvidarán, quizás sólo temporalmente
para después volver a emerger.
La tecnología metamaterial es una tecnología que está resurgiendo recientemente pese a
no ser realmente nueva. A finales de la década de los 60, el físico ucraniano Victor G. Veselago
realizó algunas especulaciones sobre la existencia de medios que presentaran una permitividad
dieléctrica (ε) y permeabilidad magnética (μ) negativas. En 1968 escribió un artículo en “Soviet
Physics Uspekhi” [1] donde se postulaban las propiedades que podría tener un medio artificial
con ε y μ negativas. Dicho artículo creó un gran revuelo, sin embargo, la teoría propuesta por
Veselago quedo temporalmente apartada al no aportar pruebas concluyentes de la existencia de
materiales con semejantes características.
Posteriormente, los doctores John B. Pendry y David R. Smith [2] dieron un vuelco
importantísimo a la situación gracias a la creación de materiales con unas características como
6
Introducción
las descritas por Veselago. A partir de ese momento, los metamateriales cobraron un gran
interés, y en la actualidad son una de las tecnologías que levantan mayores expectativas por sus
fascinantes propiedades.
En este proyecto, nos proponemos dar un paso más en el campo de los metamateriales
diseñando y fabricando un divisor de potencia en banda dual implementado mediante líneas
metamateriales. Con la tecnología microstrip actual ya es posible diseñar un dispositivo con las
características anteriormente mencionadas, siempre y cuando las frecuencias de funcionamiento
sean múltiples la una de la otra, condición que resulta una importante limitación. El dispositivo
que en este proyecto se diseñará permitirá superar dicha restricción, permitiendo por lo tanto
implementar un solo divisor con dos frecuencias de funcionamiento arbitrarias.
A lo largo de este capítulo se introducirán las características básicas de la tecnología
metamaterial. En primer lugar se verán los comportamientos que los hacen distintos a los
materiales convencionales (medios diestros) para después pasar a mostrar como se pueden
modelar mediante SRRs y CSRRs, y por último ver como éstos pueden ser aplicados sobre
líneas de transmisión.
1.1. Introducción a los Metamateriales
Los metamateriales se definen como medios efectivos y homogéneos con propiedades
electromagnéticas exóticas poco comunes en la naturaleza. Por regla general, se llama medio
efectivo a una estructura que presenta un tamaño medio de celda mucho menor al de la longitud
de onda guiada, por lo que para dicha onda, el material será homogéneo [3].
Al trabajar con medios efectivos se pueden especificar magnitudes electromagnéticas
efectivas (μeff y εeff), que se podrán ajustar en cierto modo mediante el adecuado diseño de la
celda que formará el medio. Un buen diseño permitirá imponer valores arbitrarios de
impedancia y velocidad de fase, por lo que hasta cierto punto, será posible controlar el diagrama
de dispersión, que relaciona la constante de propagación con la frecuencia (β(ω)), y cuya
expresión se muestra en la ecuación (1.1) [3].
μεωβ = (1.1)
En función del signo de las magnitudes electromagnéticas μeff y εeff se definirán cuatro
regiones de comportamiento tal y como se muestran en la figura 1-1.
7

Introducción
Figura 1-1 – Clasificación de los materiales en función del signo de ε y μ. Figura extraída de [3].
De los 4 medios que se observan en la figura 1-1, solamente dos de ellos permiten la
propagación: los medios I y III. En el medio I, tanto μeff como εeff son positivos y esto
corresponde a un medio dieléctrico convencional (diestro). En el medio II εeff es positivo pero
μeff es negativo, por lo que la constante de propagación (1.1) será compleja y sólo se admitirán
modos evanescentes, imposibilitando por tanto la propagación. En el medio III, μeff y εeff son
simultáneamente negativos. En tal caso la propagación vuelve a ser posible, con la
consideración que tal comportamiento únicamente se puede dar en materiales artificiales. Por
último, en el medio IV εeff es negativo pero μeff es positivo, de modo que estamos en el mismo
caso que el medio II. A lo largo de este documento nos centraremos básicamente en los medios
que conforman el 3er cuadrante.
Los medios del 3er cuadrante se denominan también medios zurdos (LHM de sus siglas
en ingles Left Hended Metamaterial) porque el vector de onda junto con el campo eléctrico y el
campo magnético no siguen la regla de la mano derecha sino que siguen la de la mano
izquierda. En la figura 1-2 se muestra este efecto con más detalle.
8
Introducción
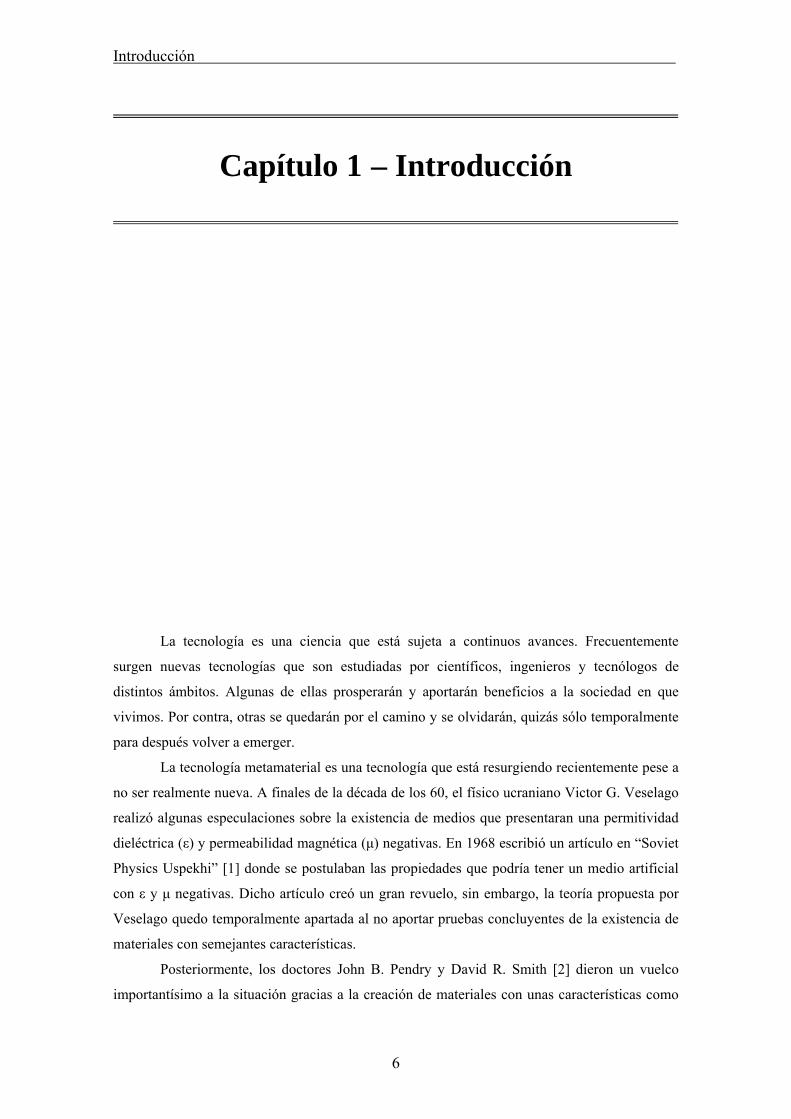
Figura 1-2 – Relación E, H y k para un medio LHM (a) y un medio convencional RHM (b).
Otra característica importante a destacar es que la ley de Snell se invierte al considerar
el signo negativo que aparecer en la definición del índice de refracción (1.2).
εμ±=n (1.2)
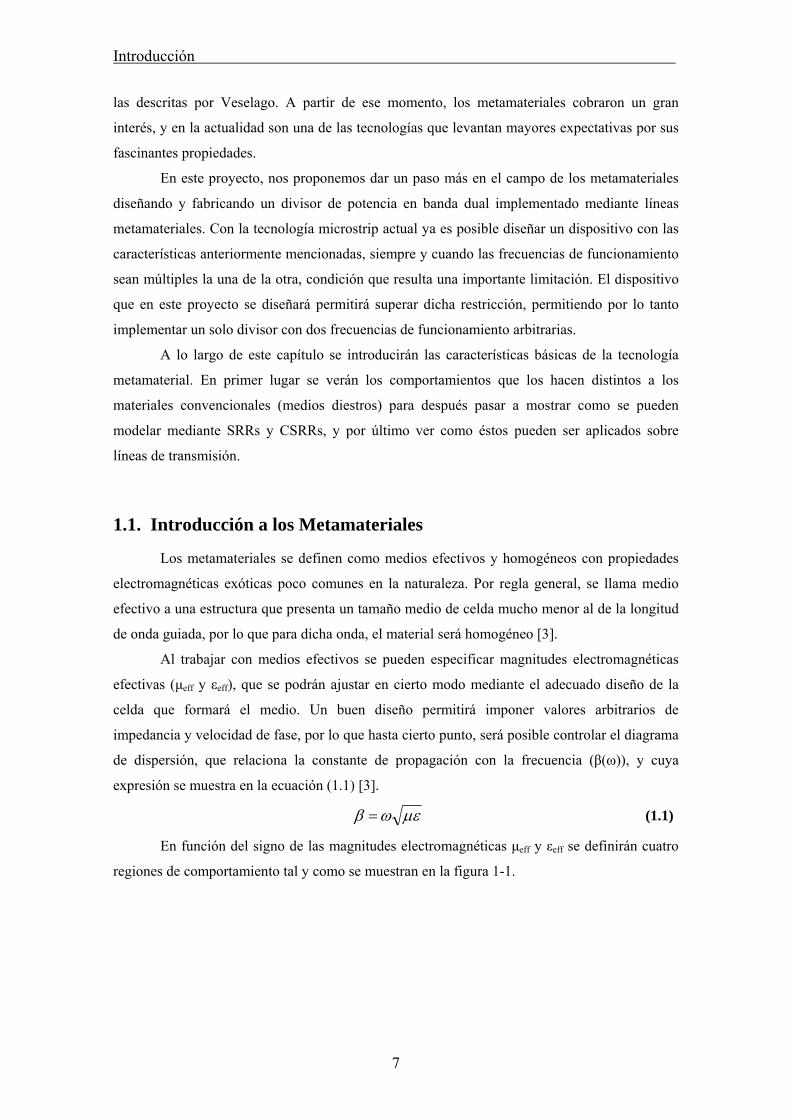
Para ver el efecto que produce la inversión de la ley de Snell mirar figura 1-3. De igual
modo, los efectos Doppler y de Cherenkov también se invierten.
Figura 1-3 – Refracción de las ondas EM en la superficie de contacto entre dos medios iguales (a) y
entre un medio RH y otro LH (b). Figura extraída de [3].
En la figura 1-3 se observa como es posible invertir la dirección de propagación de la
onda que incide sobre la superficie de contacto de dos medios distintos (uno RH y el otro LH),
comportamiento que puede ser empleado en la construcción de lentes sin que los materiales
deban estar curvados tal y como se puede ver en la figura 1-4.
En esta figura se puede ver como gracias a la interposición de un medio LH en un
medio convencional RH se consigue crear una lente totalmente plana.
9

Introducción
Figura 1-4 – Lente convencional (a) y lente implementada con metamateriales (b). Figura extraída de [2].
Uno de los comportamientos que ha levantado mayor expectativa y a su vez
controversia en el campo de los metamateriales se da cuando se cumple la condición (1.3).
100
−== μμ
εε (1.3)
En estas situaciones, la impedancia del medio y la del vacío son iguales y el desfase de
la onda entre la fuente y el foco se anula incluso para las ondas evanescentes. Este hecho tendría
como resultado la focalización más allá del límite óptico de la longitud de onda, obteniendo por
tanto una lente perfecta [4].
A continuación se mostrará como es posible conseguir los medios con ε y μ negativas.
En primer lugar se mostraran las partículas que posibilitan obtener valores de permeabilidad
magnética negativa y posteriormente las que aportan una permitividad dieléctrica negativa.
1.1.1. Medios con permeabilidad magnética y permitividad dieléctrica negativas
Tal y como se argumentó anteriormente, para obtener un medio zurdo es necesario que
tanto la permeabilidad magnética como la permitividad dieléctrica sean negativas
simultáneamente. A continuación se mostrará como es posible obtener estructuras con μ
negativa.
A finales de los años 90, John Pendry presentó una partícula con la que era posible
obtener valores negativos de μ [5]. Esta partícula, conocida como resonador en anillos abiertos
(SRR del inglés Split Ring Resonator), supuso un punto de inflexión en el campo de los
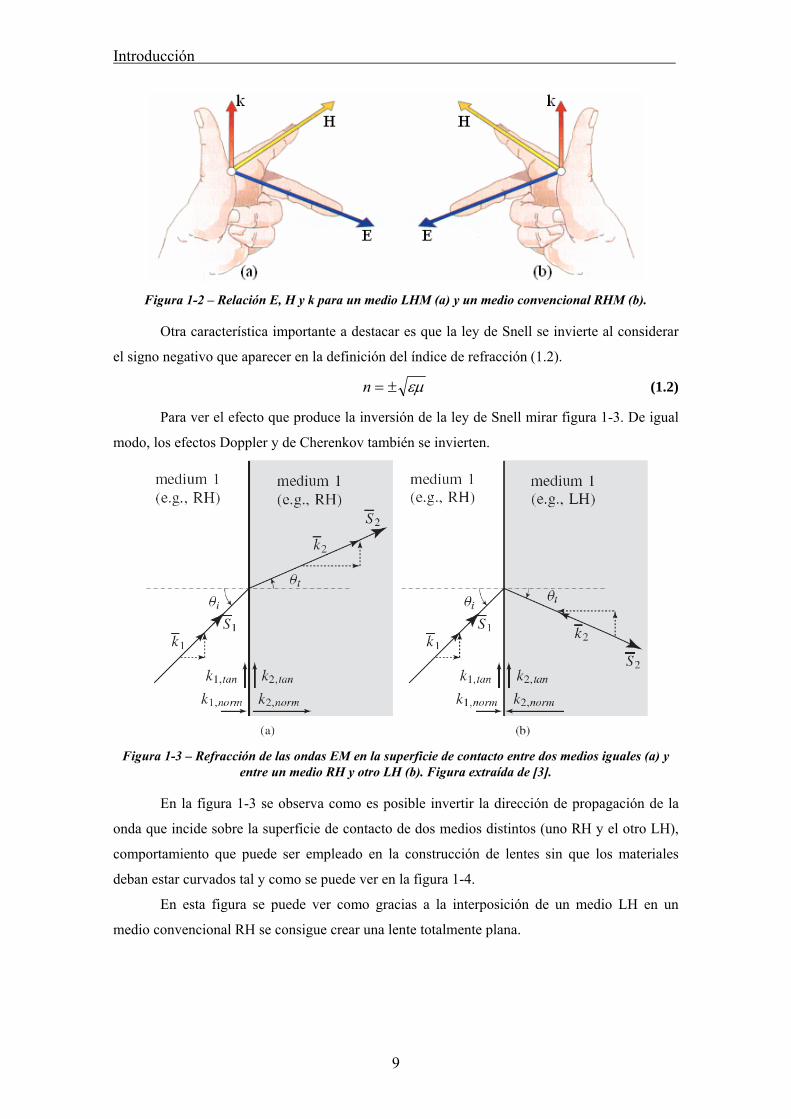
metamateriales. El resonador, tal y como se muestra con más detalle en la figura 1-5, está
formado por dos anillos concéntricos metálicos con unas pequeñas aberturas o cortes en
extremos opuestos en un anillo del otro. Entre anillos hay una separación d.
10
Introducción
Figura 1-5 – Detalle de un SRR.
Esta estructura no se alimenta directamente sino que debe ser excitada mediante un
campo magnético variable en la dirección de la superficie que definen los anillos. Este campo
magnético puede proceder de una onda externa al medio o también de un modo propagado por
una línea coplanar. Las corrientes que se generarán en cada uno de los anillos no se podrán
cerrar sobre el propio anillo debido a las aberturas que a éste se le han realizado, por lo que
únicamente se podrán cerrar a través de la corriente de desplazamiento, y esto será posible por
el gran efecto capacitivo que habrá dada la proximidad entre los anillos.
Para que un dispositivo presente un comportamiento resonante, es necesario un efecto
capacitivo y otro inductivo. En los SRRs, el efecto inductivo lo aportan los conductores que
crean los anillos mientras que el efecto capacitivo vendrá dado por la separación entre los
conductores que forman los anillos y las propias aberturas de ambos anillos. Actualmente
existen nuevas topologías para implementar variaciones de los SRRs. Algunas de éstas se
muestran en [6].
Dado el carácter resonante de los SRRs, mediante un array periódico de estas partículas
con una excitación adecuada es posible obtener valores negativos de permeabilidad magnética
efectiva dentro de un determinado rango de frecuencias.
Así pues, mediante las partículas aquí mostradas se consigue obtener valores negativos
de μ, pero para obtener un medio LH, también es necesario obtener valores negativos de ε. A
continuación se verá como lograr una permitividad negativa.
Para obtener permeabilidad negativa se usaron inicialmente las partículas llamadas
SRRs. En este caso, para obtener permitividad negativa se usa una estructura conocida como
medio de hilos. Este medio está formado por un conjunto de hilos conductores muy finos que, al
ser excitados con un campo eléctrico que presente su misma dirección, presentarán valores
negativos de ε nuevamente dentro de un determinado rango de frecuencias. Modificando el
radio de los hilos y la periodicidad de la red es posible modificar el rango de frecuencias en las
que el medio de hilos presenta valores negativos de ε.
Por lo tanto, juntando arrays de partículas SRRs y medios de hilos metálicos se
consiguen estructuras con ε y μ negativas, que presentarán un comportamiento como el descrito
por Veselado sobre los medios zurdos.
11
Introducción
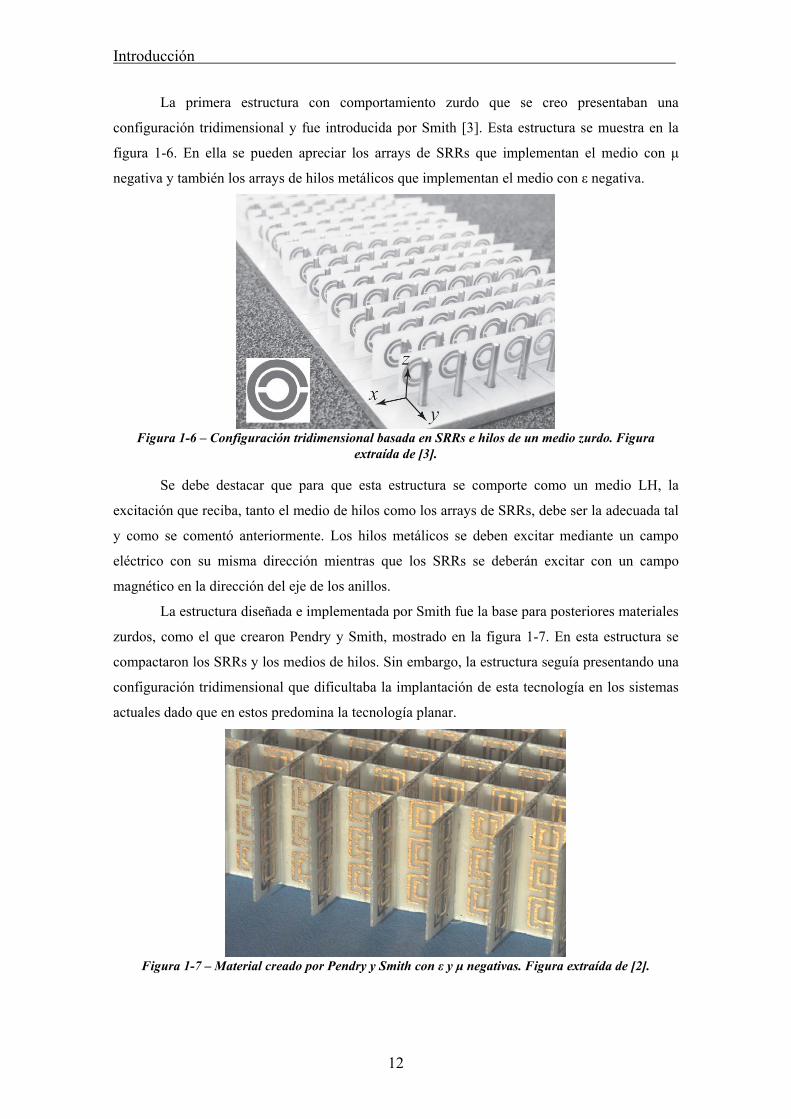
La primera estructura con comportamiento zurdo que se creo presentaban una
configuración tridimensional y fue introducida por Smith [3]. Esta estructura se muestra en la
figura 1-6. En ella se pueden apreciar los arrays de SRRs que implementan el medio con μ
negativa y también los arrays de hilos metálicos que implementan el medio con ε negativa.
Figura 1-6 – Configuración tridimensional basada en SRRs e hilos de un medio zurdo. Figura
extraída de [3].
Se debe destacar que para que esta estructura se comporte como un medio LH, la
excitación que reciba, tanto el medio de hilos como los arrays de SRRs, debe ser la adecuada tal
y como se comentó anteriormente. Los hilos metálicos se deben excitar mediante un campo
eléctrico con su misma dirección mientras que los SRRs se deberán excitar con un campo
magnético en la dirección del eje de los anillos.
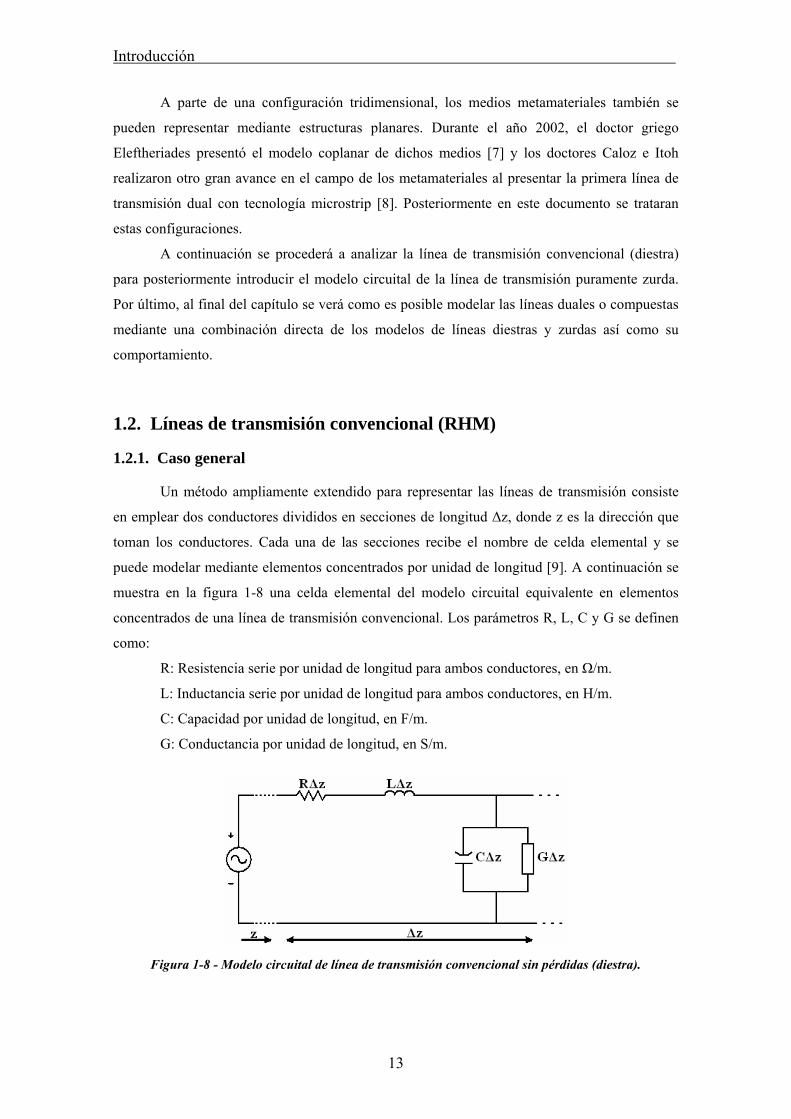
La estructura diseñada e implementada por Smith fue la base para posteriores materiales
zurdos, como el que crearon Pendry y Smith, mostrado en la figura 1-7. En esta estructura se
compactaron los SRRs y los medios de hilos. Sin embargo, la estructura seguía presentando una
configuración tridimensional que dificultaba la implantación de esta tecnología en los sistemas
actuales dado que en estos predomina la tecnología planar.
Figura 1-7 – Material creado por Pendry y Smith con ε y μ negativas. Figura extraída de [2].
12
Introducción
A parte de una configuración tridimensional, los medios metamateriales también se
pueden representar mediante estructuras planares. Durante el año 2002, el doctor griego
Eleftheriades presentó el modelo coplanar de dichos medios [7] y los doctores Caloz e Itoh
realizaron otro gran avance en el campo de los metamateriales al presentar la primera línea de
transmisión dual con tecnología microstrip [8]. Posteriormente en este documento se trataran
estas configuraciones.
A continuación se procederá a analizar la línea de transmisión convencional (diestra)
para posteriormente introducir el modelo circuital de la línea de transmisión puramente zurda.
Por último, al final del capítulo se verá como es posible modelar las líneas duales o compuestas
mediante una combinación directa de los modelos de líneas diestras y zurdas así como su
comportamiento.
1.2. Líneas de transmisión convencional (RHM)
1.2.1. Caso general
Un método ampliamente extendido para representar las líneas de transmisión consiste
en emplear dos conductores divididos en secciones de longitud Δz, donde z es la dirección que
toman los conductores. Cada una de las secciones recibe el nombre de celda elemental y se
puede modelar mediante elementos concentrados por unidad de longitud [9]. A continuación se
muestra en la figura 1-8 una celda elemental del modelo circuital equivalente en elementos
concentrados de una línea de transmisión convencional. Los parámetros R, L, C y G se definen
como:
R: Resistencia serie por unidad de longitud para ambos conductores, en Ω/m.
L: Inductancia serie por unidad de longitud para ambos conductores, en H/m.
C: Capacidad por unidad de longitud, en F/m.
G: Conductancia por unidad de longitud, en S/m.
Figura 1-8 - Modelo circuital de línea de transmisión convencional sin pérdidas (diestra).
13
Introducción
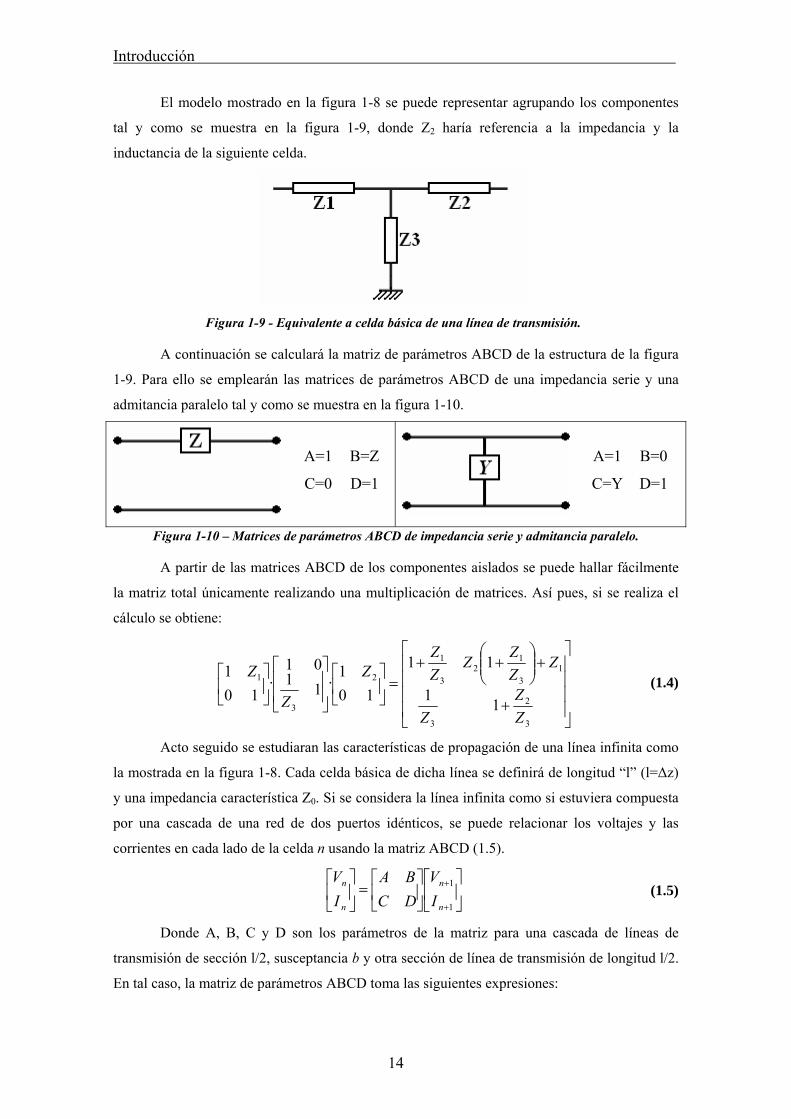
El modelo mostrado en la figura 1-8 se puede representar agrupando los componentes
tal y como se muestra en la figura 1-9, donde Z2 haría referencia a la impedancia y la
inductancia de la siguiente celda.
Figura 1-9 - Equivalente a celda básica de una línea de transmisión.
A continuación se calculará la matriz de parámetros ABCD de la estructura de la figura
1-9. Para ello se emplearán las matrices de parámetros ABCD de una impedancia serie y una
admitancia paralelo tal y como se muestra en la figura 1-10.
A=1 B=Z
C=0 D=1
A=1 B=0
C=Y D=1
Figura 1-10 – Matrices de parámetros ABCD de impedancia serie y admitancia paralelo.
A partir de las matrices ABCD de los componentes aislados se puede hallar fácilmente
la matriz total únicamente realizando una multiplicación de matrices. Así pues, si se realiza el
cálculo se obtiene:
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+
+⎟⎟⎠
⎞⎜⎜⎝
⎛++
=⎥⎦
⎤⎢⎣
⎡⎥⎥
⎦
⎤
⎢⎢
⎣
⎡⎥⎦
⎤⎢⎣
⎡
3
2
3
13
12
3
1
2
3
1
11
11
101
·1101
·10
1
ZZ
Z
ZZZZ
ZZ
Z
Z
Z (1.4)
Acto seguido se estudiaran las características de propagación de una línea infinita como
la mostrada en la figura 1-8. Cada celda básica de dicha línea se definirá de longitud “l” (l=Δz)
y una impedancia característica Z0. Si se considera la línea infinita como si estuviera compuesta
por una cascada de una red de dos puertos idénticos, se puede relacionar los voltajes y las
corrientes en cada lado de la celda n usando la matriz ABCD (1.5).
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
+
+
1
1
n
n
n
n
IV
DCBA
IV
(1.5)
Donde A, B, C y D son los parámetros de la matriz para una cascada de líneas de
transmisión de sección l/2, susceptancia b y otra sección de línea de transmisión de longitud l/2.
En tal caso, la matriz de parámetros ABCD toma las siguientes expresiones:
14

Introducción
( ) ( )
( ) ( ) ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−⎟⎠⎞
⎜⎝⎛ ++
⎟⎠⎞
⎜⎝⎛ −+−
=⎥⎦
⎤⎢⎣
⎡
θθθθ
θθθθ
sin2
cos2
cos2
sin
2cos
2sinsin
2cos
bbbj
bbjb
DCBA
(1.6)
Donde θ=kd, y k es la constante de propagación de la línea. Al ser una red reciproca se
cumple que AD-BC=1. También se cumple que:
l
nn
lnn
eIIeVV
γ
γ
−+
−+
==
1
1
(1.7)
Usando los resultados de (1.5) se llega a la expresión (1.8):
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡
+
+
+
+l
n
ln
n
n
n
n
eIeV
IV
DCBA
IV
γ
γ
1
1
1
1 (1.8)
O lo que es lo mismo:
0
1
1 =⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡
−−
+
+
n
nl
l
IV
eDCBeA
γ
γ
(1.9)
Entonces, el determinante de la matriz (1.9) vale:
( ) 02 =−+−+ BCeDAeAD ll γγ (1.10)
Y dado que AD-BC=1,
( )( )
( )DAee
DAeeeDAeeDAe
ll
ll
ll
ll
+=+
+=+
+=+
=+−+
−
−
γγ
γγ
γγ
γγ
2
2
2
11
01
( )2
cosh DAl +=γ (1.11)
A partir de la expresión (1.11) es posible representar el diagrama de dispersión, que
resultará posteriormente muy interesante a fin de poder comprobar el comportamiento de las
líneas de transmisiones tanto diestras como zurdas.
Anteriormente, en la figura 1-8 se vio el modelo general de una línea de transmisión.
Aplicando las leyes de Kirchoff se puede resolver el sistema [9] y obtener las siguientes
relaciones:
( )( ) βαωωγ jCjGLjR +=++= (1.12)
( )( )CjG
LjRLjRZωω
γω
++
=+
=0 (1.13)
Donde γ es la constante de propagación compleja. La parte real α representa las pérdidas
de propagación y la parte imaginaria β hace referencia a la constante de fase.
15

Introducción
1.2.2. Caso sin pérdidas
Existen determinados casos, como el mostrado en la figura 1-11 en que las pérdidas son
muy bajas, por lo que se pueden despreciar (α=0) quedando entonces (1.12) de la siguiente
manera:
ββαγ α jj ⎯⎯→⎯+= =0
LCjωγ =
LCωβ = (1.14)
( )( )
( )( )Cj
LjCjGLjRZ
ωω
ωω
=++
=0
CLZ =0 (1.15)
Figura 1-11 - Modelo discreto de una línea de transmisión convencional sin pérdidas.
Por otro lado, tenemos que la impedancia de una onda plana (η), que se define como la
relación entre los campos Er
y Hr
, también coincide con la impedancia intrínseca del medio y
sigue la relación mostrada en (1.16).
εμη = (1.16)
A partir de las expresiones (1.14) y (1.16) resulta directo ver como es posible obtener la
expresión (1.1) mostrada al principio del presente capítulo.
Por lo tanto, de las ecuaciones (1.13), (1.14), (1.15) y (1.16) podemos extraer las
siguientes igualdades:
μ=L (1.17)
ε=C (1.18)
Con (1.17) y (1.18) se puede comprobar el comportamiento que ya se introdujo en la
figura 1-1; cuando μ y ε tengan signo opuesto, el índice de refracción será imaginario al igual
que la constante de propagación, y estaremos en medios donde no habrá propagación.
Retomando (1.11) y considerando que ahora se está estudiando el caso sin pérdidas, se
obtiene la expresión (1.19).
16

Introducción
( )2
cos DAl +=β (1.19)
Si se substituyen los parámetros A y D por el valor hallado en (1.4) (por simetría Z1 y Z2
son iguales), se obtiene la expresión (1.20).
( ) ( )3
2
3
1 11cos2
cosZZ
ZZlADAl +=+=⇒=
+= ββ (1.20)
Como ya se ha comentado, Z1 y Z2 son iguales, de modo que para simplificar la
expresión (1.20), ambas impedancias se renombraran a Zs (impedancia serie) y Z3 pasará a
llamarse Zp (impedancia paralelo), quedando la ecuación (1.20) como la expresión mostrada en
(1.21).
( )ZpZsl += 1cos β (1.21)
Cuando se trabaja con estructuras periódicas, como por ejemplo una configuración LC
para modelar una línea de transmisión, a diferencia de las estructuras no periódicas, la relación
entre voltajes y corrientes permanece constante en los terminales de las celdas elementales que
forman la red. Esta relación constante para estructuras periódicas entre voltajes y corrientes es
conocida como impedancia bloch (ZB) y sigue la expresión mostrada en (1.22) [3].
CDZ B
12 −±= (1.22)
El signo positivo o negativo de la expresión vendrá dado por si la onda que viaja por la
red es progresiva o regresiva. En el caso de aplicar la expresión (1.22) a una estructura con la
forma mostrada en la figura 1-12, la impedancia bloch quedará como se muestra en (1.23).
( )Y
ZYZYZ B
+=
22/ (1.23)
Y operando un poco la expresión (1.23) podemos llegar a obtener la expresión (1.24)
para la impedancia bloch, que como se observa, está directamente relacionada con las
impedancias de la rama serie y la rama en derivación.
( )ZpZsZsZ B 2+⋅= (1.24)
A continuación se representará el diagrama de dispersión para un caso particular como
el mostrado en la figura 1-12. En principio, los valores escogidos de L y C carecen de
importancia, pero para el caso se ha fijado una L=1nH y una C= 0.39843pF.
17

Introducción
Figura 1-12 - Caso particular de modelo discreto de línea de transmisión convencional sin pérdidas.
El diagrama de dispersión se muestra en la figura 1-13. En esta figura se puede apreciar
como la velocidad de fase (1.25) es siempre positiva ya que en todo momento, tanto la
frecuencia como la constante de propagación son positivas. De igual modo, la velocidad de
grupo (1.26) también es positiva (la función representada es creciente), que se corresponde con
el comportamiento típico de un medio convencional diestro.
Figura 1-13 - Diagrama de dispersión de la celda mostrada en la figura 1-12.
βω
=fV (1.25)
βω∂∂
=gV (1.26)
Una vez estudiado el comportamiento de una línea de transmisión convencional se
procederá a tratar el caso de la línea de transmisión zurda. Al igual que en la sección anterior se
realizará el estudio para el caso sin pérdidas.
18
Introducción
1.3. Líneas de transmisión metamaterial
1.3.1. Línea de transmisión zurda (LHM)
Tal y como se pudo ver en la sección anterior, para la existencia de modos propagativos
es indispensable que μ y ε tengan el mismo signo. Anteriormente se ha estudiado el caso en que
ambos parámetros eran positivos, hecho correspondiente a los medios diestros, por lo que ahora
se estudiará el caso en que ambos sean negativos. A partir de las expresiones (1.17) y (1.18) se
puede ver claramente que en tal caso L y C deberán tener valores negativos, o lo que es lo
mismo, la impedancia serie deberá ser capacitiva y la impedancia paralela inductiva. Por lo
tanto, el modelo que representará una línea de transmisión zurda será el mismo que representa la
línea de transmisión diestra intercambiando inductancias por capacidades y capacidades por
inductancias. Dicho modelo se muestra en la figura 1-14.
Figura 1-14 - Modelo discreto de una línea de transmisión zurda sin pérdidas.
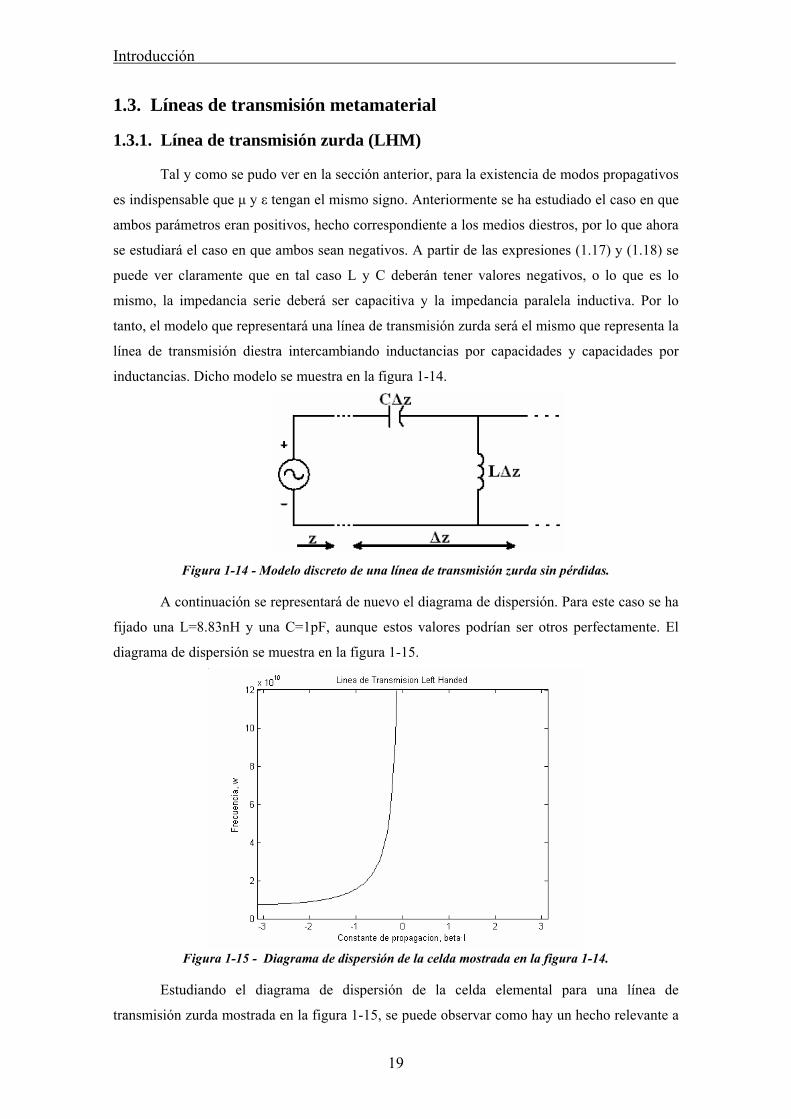
A continuación se representará de nuevo el diagrama de dispersión. Para este caso se ha
fijado una L=8.83nH y una C=1pF, aunque estos valores podrían ser otros perfectamente. El
diagrama de dispersión se muestra en la figura 1-15.
Figura 1-15 - Diagrama de dispersión de la celda mostrada en la figura 1-14.
Estudiando el diagrama de dispersión de la celda elemental para una línea de
transmisión zurda mostrada en la figura 1-15, se puede observar como hay un hecho relevante a
19
Introducción
tener en consideración. Mientras la velocidad de grupo sigue siendo positiva (la relación sigue
presentando una tendencia creciente), la velocidad de fase es ahora negativa, dado que la
constante de propagación toma valores negativos mientras que la frecuencia evidentemente
sigue siendo positiva. La propagación de ondas con velocidad de fase y grupo distintas es un
comportamiento típico de los medios metamateriales y dichas ondas se conoce como ondas de
retroceso o Backward waves en inglés.
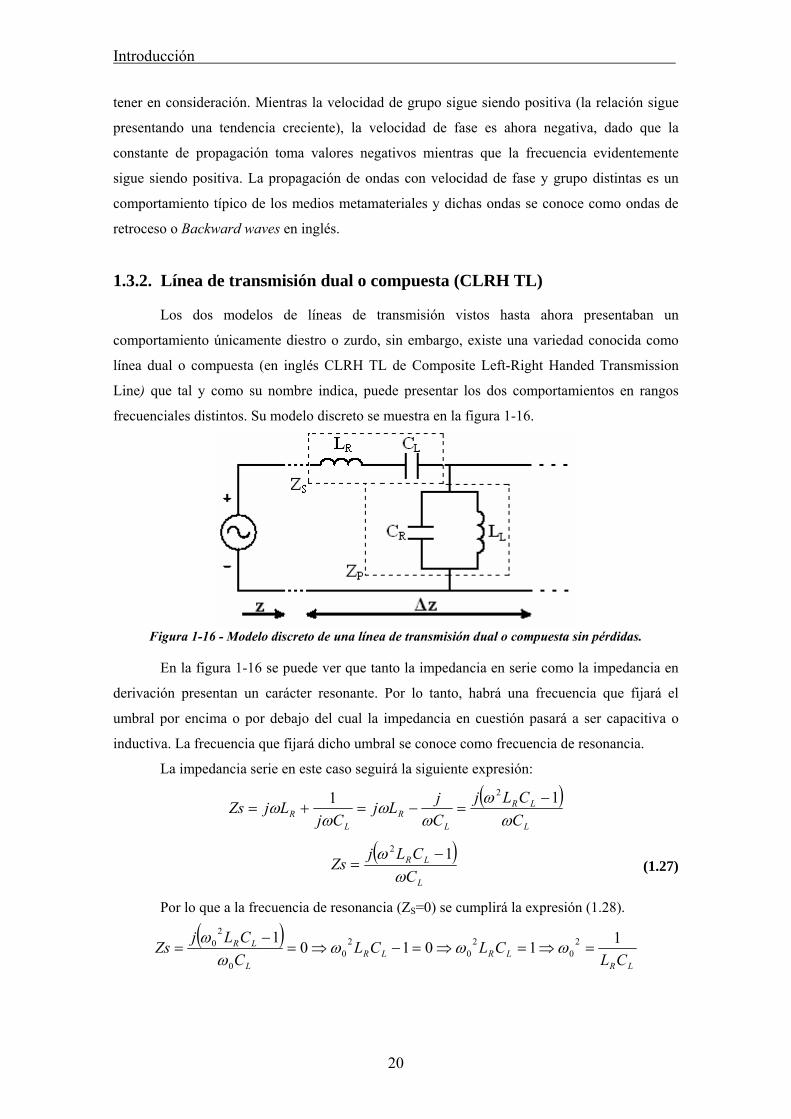
1.3.2. Línea de transmisión dual o compuesta (CLRH TL)
Los dos modelos de líneas de transmisión vistos hasta ahora presentaban un
comportamiento únicamente diestro o zurdo, sin embargo, existe una variedad conocida como
línea dual o compuesta (en inglés CLRH TL de Composite Left-Right Handed Transmission
Line) que tal y como su nombre indica, puede presentar los dos comportamientos en rangos
frecuenciales distintos. Su modelo discreto se muestra en la figura 1-16.
Figura 1-16 - Modelo discreto de una línea de transmisión dual o compuesta sin pérdidas.
En la figura 1-16 se puede ver que tanto la impedancia en serie como la impedancia en
derivación presentan un carácter resonante. Por lo tanto, habrá una frecuencia que fijará el
umbral por encima o por debajo del cual la impedancia en cuestión pasará a ser capacitiva o
inductiva. La frecuencia que fijará dicho umbral se conoce como frecuencia de resonancia.
La impedancia serie en este caso seguirá la siguiente expresión:
( )L
LR
LR
LR C
CLjCjLj
CjLjZs
ωω
ωω
ωω
11 2 −=−=+=
( )L
LR
CCLjZs
ωω 12 −
= (1.27)
Por lo que a la frecuencia de resonancia (ZS=0) se cumplirá la expresión (1.28).
( )LR
LRLRL
LR
CLCLCL
CCLjZs 110101 2
02
02
00
20 =⇒=⇒=−⇒=
−= ωωω
ωω
20

Introducción
LRCL1
0 =ω (1.28)
Por otro lado, si se realiza el proceso correspondiente para la impedancia en derivación
se obtiene la expresión (1.29).
( )11
1
22 −=
−=
+
⋅=
RL
L
R
RL
R
L
RL
RL
CLjL
CjCLj
CL
CjLj
CjLj
Zpω
ω
ωω
ωω
ωω
RL
L
CLLjZp 21 ω
ω−
= (1.29)
Y la frecuencia de resonancia, en la que se cumplirá que Zp=∞, seguirá la expresión
mostrada en (1.30).
RLRLRLRL
L CLCLCLCL
LjZp =⇒=⇒=−⇒∞=−
= 20
20
202
0
0 1011
ωωωωω
RLCL1
0 =ω (1.30)
Para que el modelo mostrado en la figura 1-16 se comporte como una línea de
transmisión, ya sea zurda o diestra, el efecto que predomine en una rama deberá ser diferente al
de la otra. Por debajo de la frecuencia de resonancia definida para la rama serie, la impedancia
será capacitiva (predominará la impedancia de la capacidad frente a la de la inductancia),
mientras que por encima de esa frecuencia predominará la parte inductiva y la impedancia será
inductiva. Por otro lado, para la rama en derivación, predominará el efecto inductivo por debajo
de la frecuencia de resonancia del resonador en paralelo y el efecto capacitivo por encima de
dicha frecuencia.
Sin embargo, para que la línea de transmisión tenga un comportamiento zurdo debe
predominar el efecto capacitivo en la rama serie e inductivo en la rama derivación. De igual
modo, para que la línea presente un comportamiento diestro debe predominar el efecto inductivo
en la impedancia serie y capacitivo en derivación. El comportamiento de la línea de transmisión
siempre vendrá impuesto por las dos impedancias, dado que si en algún momento, en la
impedancia serie y en la derivación predomina el mismo efecto, se dejará de cumplir el modelo
básico de línea de transmisión y por lo tanto, no habrá propagación.
En el caso en que las dos frecuencias de resonancia tengan distinto valor, sea cual sea la
mayor y la menor, mientras la frecuencia sea inferior a ambas frecuencias de resonancia, estará
predominando el efecto capacitivo en la rama serie e inductivo en la rama paralelo, por lo que la
línea tendrá un comportamiento zurdo. En el momento que la frecuencia esté por encima de una
de las frecuencias de resonancia y por debajo de la otra, predominará el mismo efecto en ambas
21
Introducción
ramas (si la frecuencia menor es la de la rama serie, el efecto que predominará será el inductivo;
en el otro caso predominará en ambas ramas el efecto capacitivo), de modo que no se estará
cumpliendo el modelo de línea de transmisión y no habrá propagación. Por otro lado, cuando la
frecuencia esté por encima de ambas frecuencias de resonancia, predominará el efecto inductivo
en la rama serie y capacitivo en la rama derivación, y la línea de transmisión tendrá un
comportamiento diestro.
Por lo tanto, con esto se demuestra que con un modelo de línea de transmisión como el
mostrado en la figura 1-16 es posible implementar una línea que presente un comportamiento
zurdo dentro del rango de frecuencias en que predomine el efecto capacitivo en la impedancia
serie e inductivo en la impedancia paralelo, y un comportamiento diestro en el rango frecuencial
en que predomine el efecto inductivo en la impedancia serie y capacitivo en la paralelo.
Hasta ahora, en ningún momento se ha especificado que las dos frecuencias de
resonancia deban ser iguales. Éste es un caso particular que se conoce como caso balanceado, en
el que la banda zurda y la diestra van seguidas (no hay salto de frecuencia entre una banda y
otra). En el caso balanceado se debe cumplir la expresión (1.31).
RLLRParaleloSerie
RLParalelo
LRSerie
CLCL
CLCL
11
1,1
,0,0
,0,0
=⇒=
==
ωω
ωω
RLLR CLCL = (1.31)
En el caso general o no balanceado existe una región donde no se puede dar la
propagación. Este hecho es debido a que tanto en la impedancia serie como en la impedancia en
derivación predomina el mismo efecto, capacitivo o inductivo, por lo que no se cumple la
condición de propagación a parte de dejarse de cumplir el modelo básico de línea de
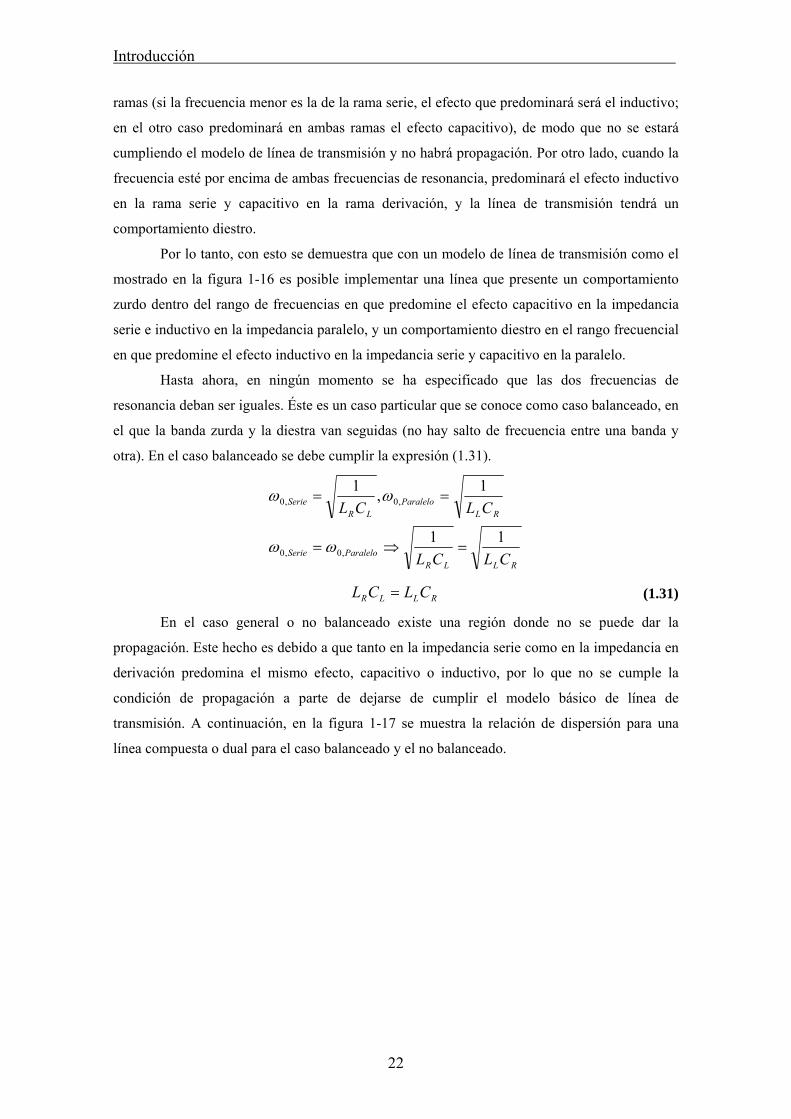
transmisión. A continuación, en la figura 1-17 se muestra la relación de dispersión para una
línea compuesta o dual para el caso balanceado y el no balanceado.
22
Introducción
(a) (b)
Figura 1-17 – Diagrama de dispersión para el caso balanceado (a) y para el caso no balanceado (b). En la figura 1-17 se observan los casos comentados anteriormente. En primer lugar se
muestra el caso balanceado en el que la transición entre el comportamiento zurdo (a frecuencias
inferiores) y diestro (a frecuencias superiores) es continua. Por otro lado, en el diagrama de
dispersión mostrado en la figura 1-17 (b) la transición no es continua dado que hay dos
frecuencias de resonancia distintas marcadas en colores rojo y verde. Por debajo de la
frecuencia de resonancia inferior (roja), que corresponde a la parte zurda, está predominando el
efecto capacitivo en la impedancia serie, mientras que en la impedancia derivación predomina el
efecto inductivo. Por otro lado, por encima de la frecuencia de resonancia superior (verde), que
corresponde a la parte diestra, predomina el efecto inductivo en la impedancia serie y capacitivo
en la impedancia derivación. Entre ambas frecuencias de resonancia no se da la propagación tal
como muestra el diagrama de dispersión, dado que en ambas ramas predomina el efecto
inductivo.
Resulta interesante destacar que, al igual que en los casos en que las líneas de
transmisión presentaban un comportamiento únicamente zurdo o diestro, en el caso dual, la
velocidad de grupo sigue siendo en todo momento positiva (la función sigue siendo creciente)
mientras que la velocidad de fase cambia de signo. Con un comportamiento diestro es positiva
mientras que con un comportamiento zurdo es negativa.
1.3.3. Líneas basadas en el modelo resonante
En la actualidad existen dos modelos de resonadores en los que se pueden basar las
líneas de transmisión para obtener un comportamiento zurdo: los resonadores en anillos abiertos
(SRR de Split Ring Resonator) y los resonadores en anillos abiertos complementarios (CSRR de
Complementary Split Ring Resonador). En los dos próximos sub-apartados se estudiaran las
características de ambos resonadores y como se deben aplicar a las líneas de transmisión, tanto
coplanares como microstrip, a fin de crear líneas de transmisión metamateriales o líneas zurdas.
23
Introducción
1.3.3.1. Líneas basadas en resonadores de anillos abiertos (SRRs)
Como se vio anteriormente, excitando adecuadamente un array de SRRs y un medio de
hilos es posible obtener un medio con permeabilidad magnética y permitividad dieléctrica
negativa. En la figura 1-6 y la figura 1-7 se mostraron configuraciones volumétricas de estas
estructuras, sin embargo, se comentó que su geometría tridimensional dificultaba mucho su
implantación. A continuación se estudiará como implementar estas estructuras mediante
tecnologías planares. Al trabajar con tecnología planar, la línea de transmisión deberá ser
microstrip o coplanar. En principio, la mejor opción será la que aporte un mejor acoplamiento a
los SRRs.
Cuando se trabaja con líneas de transmisión coplanar, los anillos son excitados mediante
un modo que se propaga por la misma línea de transmisión, ya que en ésta, las líneas de campo
magnético presentan una dirección normal a la superficie del slot. Por lo tanto, si se graban los
anillos en la zona del slot de la línea coplanar, el campo magnético de ésta los excitará de forma
adecuada. Otra posible alternativa sería grabar los anillos en la parte posterior del sustrato,
evitando de este modo problemas de adaptación.
En el caso microstrip, los SRRs deberán grabarse en la parte superior del metal y
cercanos al conductor que forma la línea. Sin embargo, generalmente los SRRs se excitan mejor
con una línea coplanar, por lo que este tipo de resonadores se suelen combinar con líneas
coplanares en lugar de microstrip.
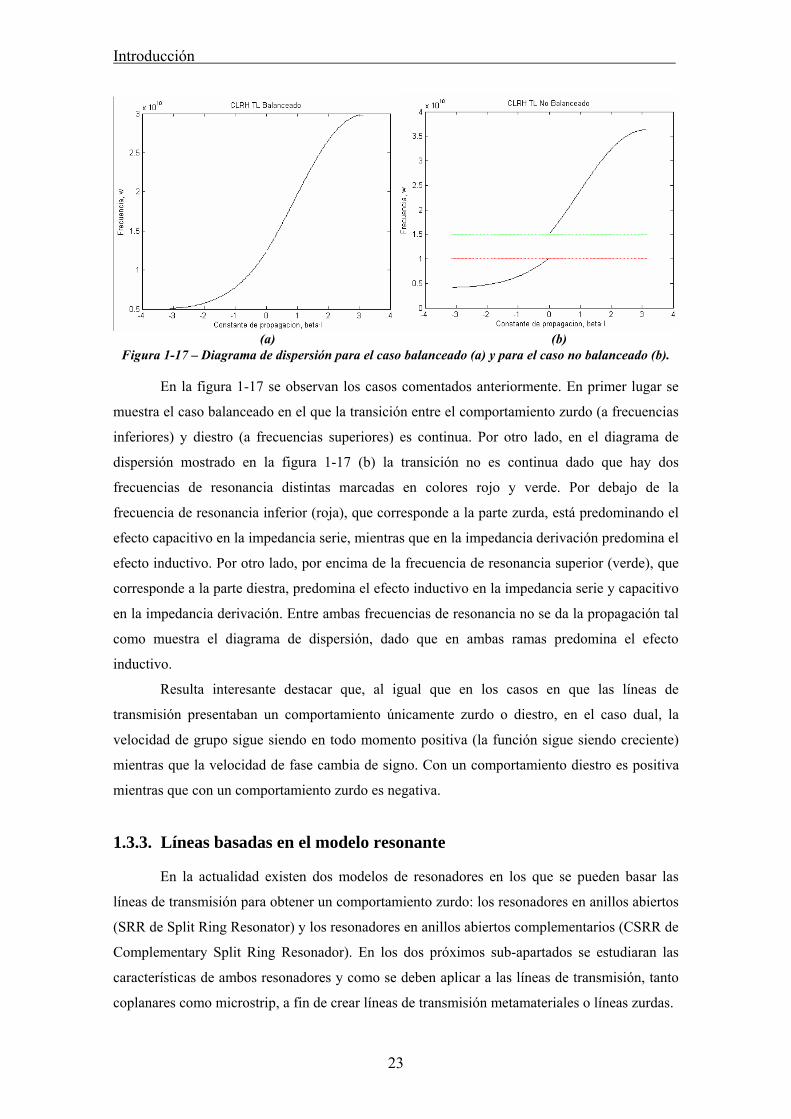
Una vez sintetizada la línea de transmisión con permeabilidad magnética negativa, se
debe buscar una forma de obtener también una permitividad dieléctrica negativa a fin de poder
obtener un medio totalmente LH. Una opción consiste en cortocircuitar la pista central del
dispositivo con el plano de masa mediante elementos inductivos [10]. Con ello se obtiene
finalmente un dispositivo formado por una línea de transmisión y SRRs acoplados con un
comportamiento zurdo. En la figura 1-18 se muestra un ejemplo de un prototipo de una
estructura metamaterial con una guía de onda coplanar (CPW).
Figura 1-18 – Ambas caras de un prototipo de estructura metamaterial CPW. En la cara superior se observa el medio de hilos mientras que en la inferior hay grabados los SRRs. Figura extraida de [10]
24
Introducción
1.3.3.2. Líneas basadas en resonadores de anillos abiertos complementarios
(CSRRs)
Anteriormente se ha visto como obtener una permeabilidad magnética y una
permitividad dieléctrica negativas con líneas de transmisión basadas en SRRs y conexiones
inductivas al plano de masa. Esta no es la única posibilidad para obtener materiales con
comportamientos zurdos. Como se ha visto inicialmente, los SRRs son partículas en las que hay
dos anillos conductores concéntricos con aberturas en lados opuestos en un anillo y otro. Existe
una variación de estos SRRs llamados CSRRs en los se parte de una lámina conductora a la que
se elimina el metal formando dos anillos concéntricos abiertos en los lados opuestos. En otras
palabras, lo que era metal en el SRR pasa a ser vacío en el CSRR y lo que era vacío pasa a ser
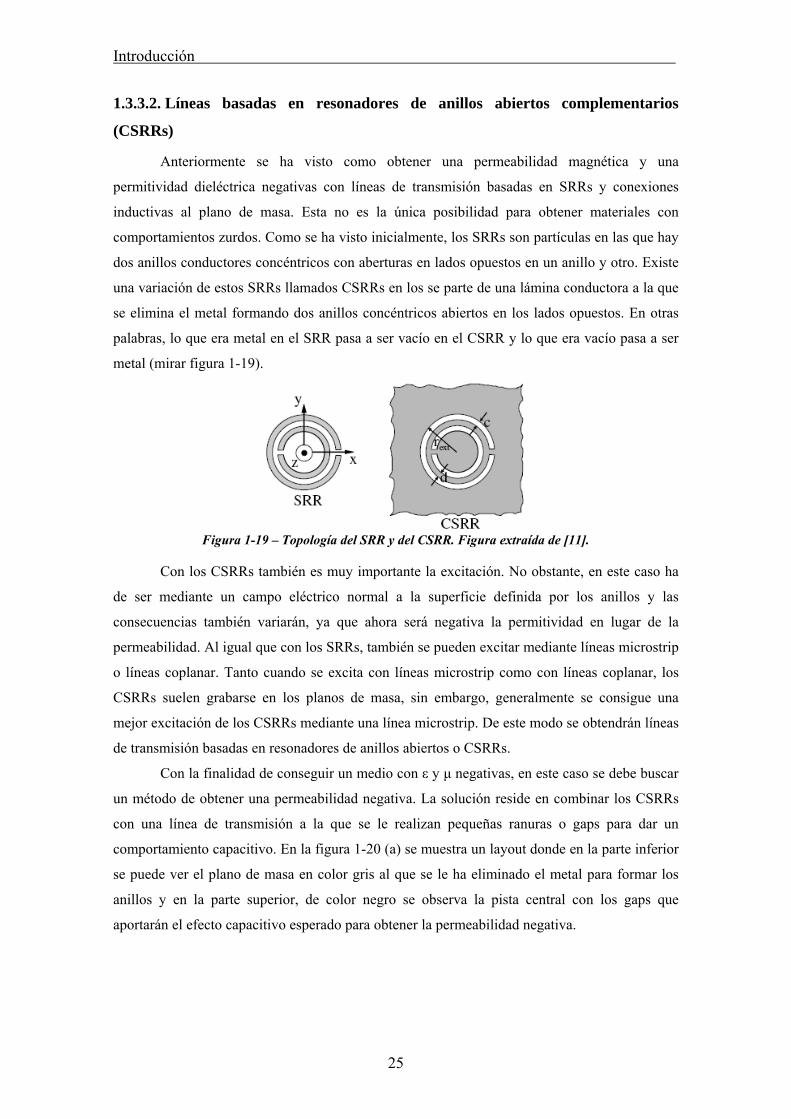
metal (mirar figura 1-19).
Figura 1-19 – Topología del SRR y del CSRR. Figura extraída de [11].
Con los CSRRs también es muy importante la excitación. No obstante, en este caso ha
de ser mediante un campo eléctrico normal a la superficie definida por los anillos y las
consecuencias también variarán, ya que ahora será negativa la permitividad en lugar de la
permeabilidad. Al igual que con los SRRs, también se pueden excitar mediante líneas microstrip
o líneas coplanar. Tanto cuando se excita con líneas microstrip como con líneas coplanar, los
CSRRs suelen grabarse en los planos de masa, sin embargo, generalmente se consigue una
mejor excitación de los CSRRs mediante una línea microstrip. De este modo se obtendrán líneas
de transmisión basadas en resonadores de anillos abiertos o CSRRs.
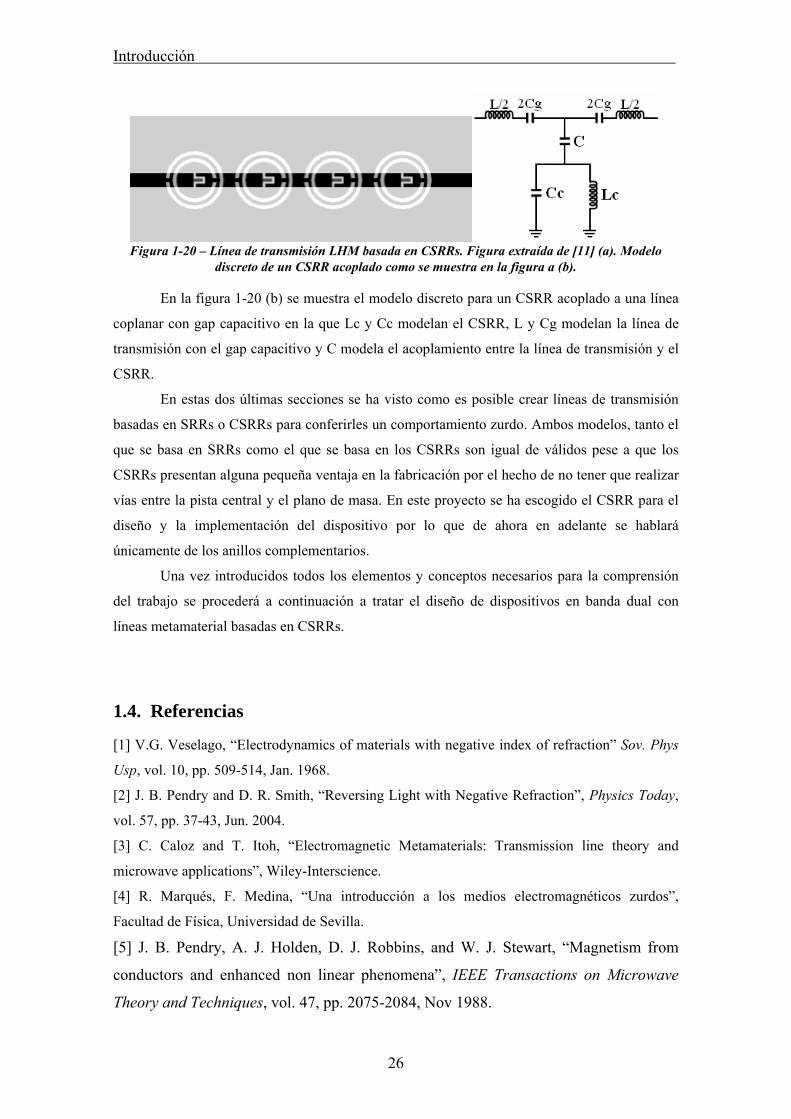
Con la finalidad de conseguir un medio con ε y μ negativas, en este caso se debe buscar
un método de obtener una permeabilidad negativa. La solución reside en combinar los CSRRs
con una línea de transmisión a la que se le realizan pequeñas ranuras o gaps para dar un
comportamiento capacitivo. En la figura 1-20 (a) se muestra un layout donde en la parte inferior
se puede ver el plano de masa en color gris al que se le ha eliminado el metal para formar los
anillos y en la parte superior, de color negro se observa la pista central con los gaps que
aportarán el efecto capacitivo esperado para obtener la permeabilidad negativa.
25
Introducción
Figura 1-20 – Línea de transmisión LHM basada en CSRRs. Figura extraída de [11] (a). Modelo
discreto de un CSRR acoplado como se muestra en la figura a (b).
En la figura 1-20 (b) se muestra el modelo discreto para un CSRR acoplado a una línea
coplanar con gap capacitivo en la que Lc y Cc modelan el CSRR, L y Cg modelan la línea de
transmisión con el gap capacitivo y C modela el acoplamiento entre la línea de transmisión y el
CSRR.
En estas dos últimas secciones se ha visto como es posible crear líneas de transmisión
basadas en SRRs o CSRRs para conferirles un comportamiento zurdo. Ambos modelos, tanto el
que se basa en SRRs como el que se basa en los CSRRs son igual de válidos pese a que los
CSRRs presentan alguna pequeña ventaja en la fabricación por el hecho de no tener que realizar
vías entre la pista central y el plano de masa. En este proyecto se ha escogido el CSRR para el
diseño y la implementación del dispositivo por lo que de ahora en adelante se hablará
únicamente de los anillos complementarios.
Una vez introducidos todos los elementos y conceptos necesarios para la comprensión
del trabajo se procederá a continuación a tratar el diseño de dispositivos en banda dual con
líneas metamaterial basadas en CSRRs.
1.4. Referencias
[1] V.G. Veselago, “Electrodynamics of materials with negative index of refraction” Sov. Phys
Usp, vol. 10, pp. 509-514, Jan. 1968.
[2] J. B. Pendry and D. R. Smith, “Reversing Light with Negative Refraction”, Physics Today,
vol. 57, pp. 37-43, Jun. 2004.
[3] C. Caloz and T. Itoh, “Electromagnetic Metamaterials: Transmission line theory and
microwave applications”, Wiley-Interscience.
[4] R. Marqués, F. Medina, “Una introducción a los medios electromagnéticos zurdos”,
Facultad de Física, Universidad de Sevilla.
[5] J. B. Pendry, A. J. Holden, D. J. Robbins, and W. J. Stewart, “Magnetism from
conductors and enhanced non linear phenomena”, IEEE Transactions on Microwave
Theory and Techniques, vol. 47, pp. 2075-2084, Nov 1988.
26

Introducción
[6] J.D. Baena, J. Bonache, F. Martín, R. Marqués Sillero, F. Falcone, T. Lopetegui, M.A.G.
Laso, J. García-García, I. Gil, M. Flores Portillo, and M. Sorolla. “Equivalent-circuit models for
split-ring resonators and complementary split-ring resonators coupled to planar transmission
lines”, IEEE Trans. on Microwave Theory and Techniques, vol. 53, pp. 1451-1461, April 2005.
[7] G.V. Eleftheriades, A.K. Iyer and P.C. Kremer, “Planar negative refractive index media
using periodically L-C loaded transmission lines”, IEEE Transactions on Microwave Theory
and Techniques, vol. 50 (12), pp. 2702-2712, December 2002
[8] C. Caloz and T. Itoh, “Application of the transmission line theory of left-handed (LH)
materials to the realization of a microstrip ‘LH line’,” in IEEE AP-S Int. Symp., vol. 2, pp. 412-
415, San Antonio, TX, Jun. 2002.
[9] D. M. Pozar, “Microwave Engineering”, John Wiley & Sons.
[10] F. Falcone, F. Martín, J. Bonache, J. Baena, T. Lopetegi, M.A.G. Laso, J. G. García, M.
Beruete, R. Marqués, M. Sorolla, “Estructuras metamateriales en tecnología plana basadas en
partículas SRR y CSRR”.
[11] F. Falcone, T. Lopetegi, M. A. G. Laso, J. D. Baena, J. Bonache, M. Beruete, R. Marqués,
F. Martín and M. Sorolla, “Babinet principle applied to the design of metasurfaces and
metamaterials”, Phys. Rev Lett., vol. 93, pp. 197401-4, Nov. 2004.
27
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
Capítulo 2 - Diseño de dispositivos en
banda dual con líneas de transmisión
metamaterial
En este capítulo se estudiará como crear dispositivos de banda dual mediante
metamateriales. Los dispositivos de banda dual se caracterizan por desarrollar la misma función
a dos frecuencias arbitrarias distintas. Es importante destacar que las frecuencias deben ser
arbitrarias, dado que con tecnologías actuales y sin usar metamateriales es posible conseguir un
mismo funcionamiento pero a frecuencias harmónicas, nunca arbitrarias.
Un dispositivo de banda dual deberá manifestar una relación de dispersión que cumpla
las relaciones (2.1) y (2.2).
( ) 11 βωβ = (2.1)
( ) 22 βωβ = (2.2)
Donde las dos frecuencias y las dos constantes de propagación podrán tener cualquier
valor. Las líneas de transmisión compuestas (CRLH TL) que han sido tratadas en el primer
28
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
capítulo presentan esta propiedad, por lo que se podrán emplear para convertir una línea de
transmisión convencional en una línea dual. El hecho de poder crear líneas de transmisión
duales mediante el uso de líneas de transmisión con comportamiento zurdo y diestro será un
productivo avance dados los numerosos sistemas actuales con funcionamiento en banda dual
como la telefonía móvil, identificación por radio frecuencia (RFID) o wireless, al permitir
reducir el número de circuitos en los componentes de dichos sistemas [3].
2.1. Principio de funcionamiento de los dispositivos en banda dual
implementados con líneas de transmisión metamaterial
Para obtener dispositivos de banda dual implementados mediante líneas de transmisión
metamaterial es necesario trabajar con líneas de transmisión compuestas (CRLH TL). Como se
vio durante la introducción teórica, en la relación de dispersión de una línea de transmisión
compuesta se diferenciaban las dos regiones de comportamiento; la zurda a bajas frecuencias y
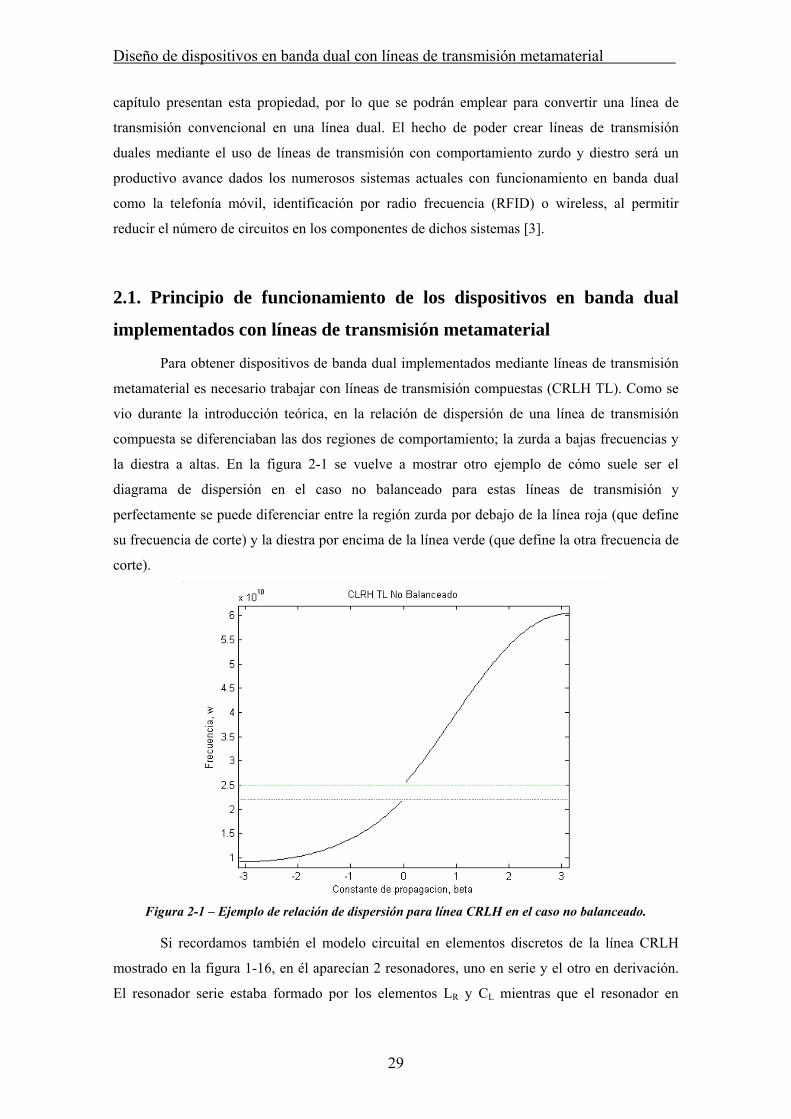
la diestra a altas. En la figura 2-1 se vuelve a mostrar otro ejemplo de cómo suele ser el
diagrama de dispersión en el caso no balanceado para estas líneas de transmisión y
perfectamente se puede diferenciar entre la región zurda por debajo de la línea roja (que define
su frecuencia de corte) y la diestra por encima de la línea verde (que define la otra frecuencia de
corte).
Figura 2-1 – Ejemplo de relación de dispersión para línea CRLH en el caso no balanceado.
Si recordamos también el modelo circuital en elementos discretos de la línea CRLH
mostrado en la figura 1-16, en él aparecían 2 resonadores, uno en serie y el otro en derivación.
El resonador serie estaba formado por los elementos LR y CL mientras que el resonador en
29
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
paralelo lo formaban CR y LL. Los elementos con subíndice L modelaban el comportamiento
zurdo que predomina a bajas frecuencias mientras que la inductancia y la capacidad con
subíndice R aportaban el comportamiento que más afecta a frecuencias superior, el diestro. Por
lo tanto, viendo el modelo en elementos discretos de una línea de transmisión compuesta, queda
patente que se dispondrá de cuatro grados de libertad que darán la flexibilidad necesaria en el
momento de realizar el diseño.
Cabe destacar que en la banda zurda, la longitud eléctrica es negativa mientras que en la
diestra es positiva, el cual es un factor que se deberá tener en cuenta. No obstante, en el
dispositivo que nos proponemos diseñar, estudiar e implementar en este proyecto, este
comportamiento no es relevante, por lo que no se le va a dar mayor importancia al signo.
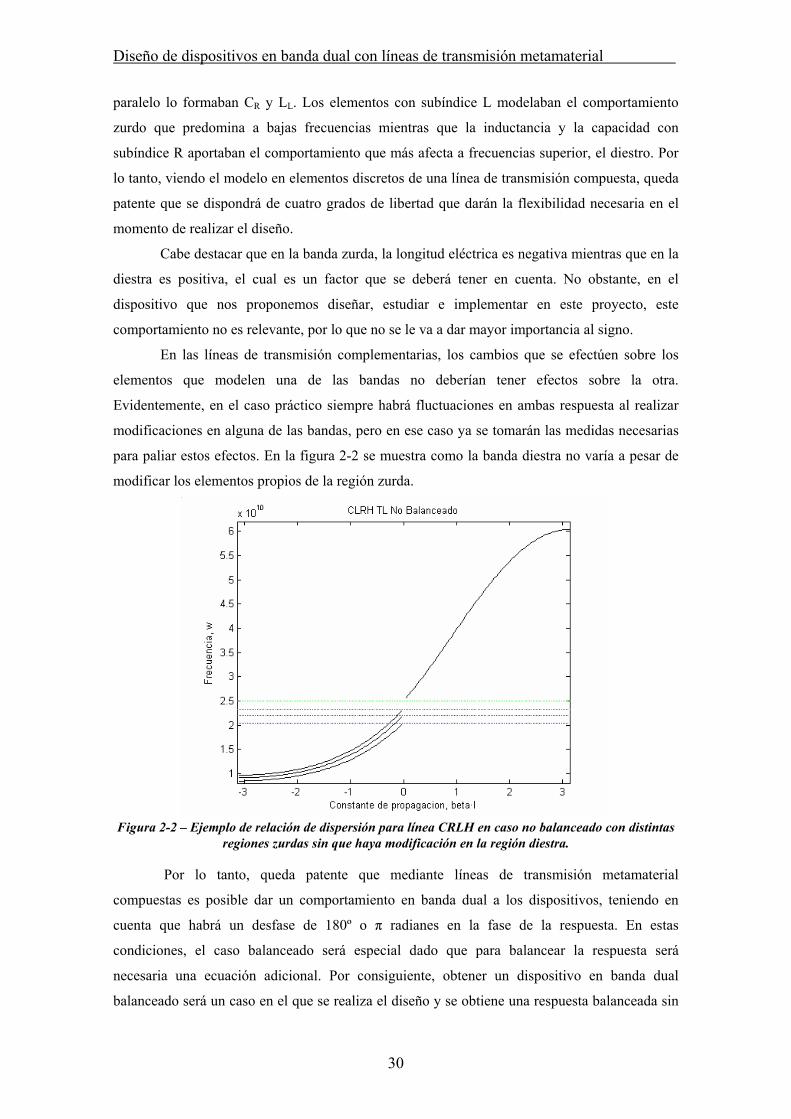
En las líneas de transmisión complementarias, los cambios que se efectúen sobre los
elementos que modelen una de las bandas no deberían tener efectos sobre la otra.
Evidentemente, en el caso práctico siempre habrá fluctuaciones en ambas respuesta al realizar
modificaciones en alguna de las bandas, pero en ese caso ya se tomarán las medidas necesarias
para paliar estos efectos. En la figura 2-2 se muestra como la banda diestra no varía a pesar de
modificar los elementos propios de la región zurda.
Figura 2-2 – Ejemplo de relación de dispersión para línea CRLH en caso no balanceado con distintas
regiones zurdas sin que haya modificación en la región diestra. Por lo tanto, queda patente que mediante líneas de transmisión metamaterial
compuestas es posible dar un comportamiento en banda dual a los dispositivos, teniendo en
cuenta que habrá un desfase de 180º o π radianes en la fase de la respuesta. En estas
condiciones, el caso balanceado será especial dado que para balancear la respuesta será
necesaria una ecuación adicional. Por consiguiente, obtener un dispositivo en banda dual
balanceado será un caso en el que se realiza el diseño y se obtiene una respuesta balanceada sin
30

Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
que se haya realmente buscado dicho comportamiento. No obstante, esta situación no es común.
Si realmente se quisiera obtener un dispositivo balanceado, se debería añadir otro grado de
libertad a fin de poder obtener otra ecuación de diseño.
En el diseño de un dispositivo en banda dual básicamente intervienen dos ecuaciones
que ya fueron estudiadas en la introducción; las ecuaciones (1.21) y (1.24). Si bien esto sólo
representa dos ecuaciones, cuando se fijen las dos frecuencias de diseño, las dos ecuaciones se
convertirán en 4, que son las necesarias para obtener un sistema de 4 ecuaciones con 4
incógnitas, quedando el sistema por lo tanto totalmente definido tal y como se muestra en las
expresiones (2.3).
( )( ) ( )( )1
11 1cos
ωωωβ
ZpZsl += (2.3)a
( )( ) ( )( )2
22 1cos
ωωωβ
ZpZsl += (2.3)b
( ) ( ) ( ) ( )( )1111 2 ωωωω ZpZsZsZB +⋅= (2.3)c
( ) ( ) ( ) ( )( )2222 2 ωωωω ZpZsZsZB +⋅= (2.3)d
Con el conjunto de expresiones mostrado en (2.3) queda completamente claro que será
posible obtener un funcionamiento dual, aunque en el caso práctico podrán aparecer algunos
problemas cuando las frecuencias se hallen demasiado próximas o separadas. Cabe destacar
también que al estar el modelo discreto de la línea CRLH totalmente definido es posible saber
que expresión presentará Zs y Zp. Estas expresiones se muestran en (2.4) y (2.5).
( ) ( )
L
LR
CCLjZs
⋅−⋅⋅⋅
=ω
ωω 12
(2.4)
( ) ( )RL
L
CLLjZp⋅⋅−
⋅⋅= 21 ω
ωω (2.5)
Si nos fijamos en las ecuaciones (2.3)a y b, cuando la longitud eléctrica de las líneas de
transmisión sea de lambda cuartos, el sistema resultante se simplificará bastante tal y como se
muestra a continuación:
( ) ( )( ) ( ) ( )
( )( )( ) ( ) ( )ωωωω
ωωπ
ωωβ ZpZs
ZpZs
ZpZs
ZpZsl −=⇒=−⇒+==±⇒+= 1102cos1cos
En este caso particular, las ecuaciones a resolver serán las más sencillas posibles (dentro
de la dificultad de resolver un sistema de 4 ecuaciones con 4 incógnitas). El sistema a resolver
será como el mostrado a continuación en (2.6).
( ) ( ) ( )12
11 ωωω jZsZsZB =−= (2.6)a
( ) ( ) ( )12
11 ωωω jZpZpZB =−= (2.6)b
31

Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
( ) ( ) ( )22
22 ωωω jZsZsZB =−= (2.6)c
( ) ( ) ( )22
22 ωωω jZpZpZB =−= (2.6)d
Por lo tanto, las ecuaciones finales a resolver son las mostradas en (2.7).
( ) ( )
L
LRB C
CLZ⋅
⋅⋅−=
1
21
11
ωωω (2.7)a
( ) ( )121
11 −⋅⋅
⋅=
RL
LB CL
LZω
ωω (2.7)b
( ) ( )
L
LRB C
CLZ⋅
⋅⋅−=
2
22
21
ωωω (2.7)c
( ) ( )122
22 −⋅⋅
⋅=
RL
LB CL
LZω
ωω (2.7)d
Ahora, con los parámetros de diseño como son las dos frecuencias de operación y la
impedancia bloch deseada se debería resolver el sistema y obtener el valor de los 4 elementos
que modelan la línea de transmisión. Si se desea una longitud eléctrica de la línea distinta a la
anteriormente especificada, el sistema a resolver será de mayor dificultad.
En el caso práctico no es tan sencillo, ya que no hay un método directo para pasar del
diseño discreto a un layout equivalente, por lo que se deberá trabajar directamente sobre el
layout.
2.2. Diseño de inversores de impedancias basados en CSRRs
operativos en banda dual
A continuación se procederá a tratar el diseño de inversores de impedancias basados en
resonadores de anillos abiertos complementarios. Por regla general, los SRRs se excitan mejor
con líneas coplanares, mientras que los CSRRs con microstrip. En este proyecto, para
implementar el inversor se partirá de una línea de transmisión microstrip, de modo que para
mejorar la excitación del resonador se grabará un CSRR en su plano de masa tal y como ya se
explicó anteriormente. En tal caso, el modelo discreto equivalente será como el que se mostró
en la figura 1-20 (b).
En ese modelo se apreciaban cinco variables: L, Cg, C, Cc y Lc. Se vio que L y Cg
modelaban la línea de transmisión y el gap capacitivo que había en ésta, C el efecto capacitivo
entre la línea y el resonador y Cc junto con Lc el resonador. En este caso se dispone de 5
elementos para realizar el diseño del dispositivo, por lo que también permitirá trabajar en banda
dual, que es un aspecto clave en este proyecto. En la sección anterior se vio como realizar un
32
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
diseño desde un punto de vista teórico a partir del modelo equivalente de un dispositivo. El
diseño teórico para el inversor sería idéntico teniendo en cuenta que ahora se dispone de un
grado de libertad más, por lo que en este apartado, se tratará el diseño directamente a partir de
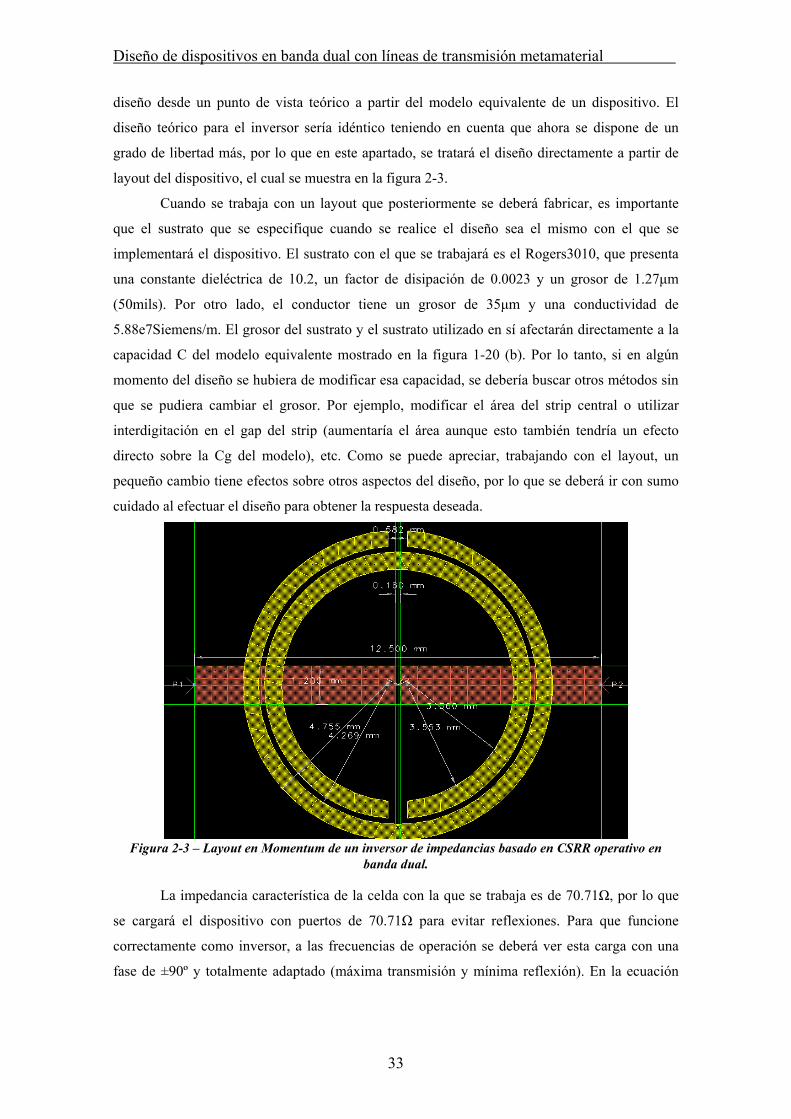
layout del dispositivo, el cual se muestra en la figura 2-3.
Cuando se trabaja con un layout que posteriormente se deberá fabricar, es importante
que el sustrato que se especifique cuando se realice el diseño sea el mismo con el que se
implementará el dispositivo. El sustrato con el que se trabajará es el Rogers3010, que presenta
una constante dieléctrica de 10.2, un factor de disipación de 0.0023 y un grosor de 1.27μm
(50mils). Por otro lado, el conductor tiene un grosor de 35μm y una conductividad de
5.88e7Siemens/m. El grosor del sustrato y el sustrato utilizado en sí afectarán directamente a la
capacidad C del modelo equivalente mostrado en la figura 1-20 (b). Por lo tanto, si en algún
momento del diseño se hubiera de modificar esa capacidad, se debería buscar otros métodos sin
que se pudiera cambiar el grosor. Por ejemplo, modificar el área del strip central o utilizar
interdigitación en el gap del strip (aumentaría el área aunque esto también tendría un efecto
directo sobre la Cg del modelo), etc. Como se puede apreciar, trabajando con el layout, un
pequeño cambio tiene efectos sobre otros aspectos del diseño, por lo que se deberá ir con sumo
cuidado al efectuar el diseño para obtener la respuesta deseada.
Figura 2-3 – Layout en Momentum de un inversor de impedancias basado en CSRR operativo en
banda dual.
La impedancia característica de la celda con la que se trabaja es de 70.71Ω, por lo que
se cargará el dispositivo con puertos de 70.71Ω para evitar reflexiones. Para que funcione
correctamente como inversor, a las frecuencias de operación se deberá ver esta carga con una
fase de ±90º y totalmente adaptado (máxima transmisión y mínima reflexión). En la ecuación
33

Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
(2.8) se recuerda la expresión de la impedancia de entrada de una línea de transmisión cargada
para el caso sin pérdidas [9].
( )( )ll
ββ
tantan
0
00
L
Lin jZZ
jZZZZ++
⋅= (2.8)
Cuando la longitud eléctrica de la línea es de λ/4, la expresión (2.8) queda como se
muestra en (2.9). De esta expresión se extrae que una línea con longitud eléctrica λ/4 o cualquier
múltiplo entero e impar de lambda cuartos se comportará como un inversor de impedancia.
( )( )
( )( )2tan
2tan
42tan
42tan
tantan
0
00
0
0
0
40
00 π
π
λλπ
λλπ
ββ
λ L
L
L
L
L
Lin
jZZ
jZZZ
jZZ
jZZZ
jZZjZZZZ
+
+⋅=
⎟⎠⎞
⎜⎝⎛+
⎟⎠⎞
⎜⎝⎛+
⋅=++
⋅==l
l
l
Lin Z
ZZ2
0= (2.9)
Por lo tanto, si a las frecuencias de operación se tiene la impedancia deseada con una
fase de ±90º, el dispositivo funcionará correctamente como un inversor.
En la figura 2-3 se muestra con detalle la celda base que formará el inversor de
impedancias. En color marrón se aprecia la línea de transmisión con el gap capacitivo que
corresponde a la capa superior del diseño. En color amarillo están los anillos del CSRR que
estarán grabados en el plano de masa. Es importante destacar que al trabajar con CSRR, en
realidad el color amarillo representa la parte de metal que será eliminada del plano de masa en
lugar del metal propiamente dicho. El objetivo de este proyecto es realizar un diseño que
posteriormente sea implementable, por lo que se deberán respetar en todo momento los límites
de fabricación fijados por la fresadora con la que se fabricará el dispositivo. Los factores más
importantes a tener en cuenta son los grosores mínimos: 0.16mm en el slot y 0.10mm en el
metal.
Al realizar la simulación del diseño mostrado en la figura 2-3 se obtienen los resultados
mostrados en la figura 2-4. Para obtener estos resultados se han tenido que añadir las ecuaciones
(2.10) al data display. Estas ecuaciones realizan la conversión de parámetros S a parámetros
ABCD para poder representar correctamente la impedancia bloch y la relación de dispersión. De
la relación de dispersión se muestra tanto su parte real como la imaginaria, ya que cuando ésta
sea imaginaria no habrá propagación, de modo que una respuesta obtenida con un valor de parte
imaginaria distinto de cero no sería válida.
34

Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
Eqn A=Mat(1,1) Eqn B=Mat(1,2)
Eqn C=Mat(2,1) Eqn D=Mat(2,2)
Eqn ZB=(B*1)/(((A**2)-1)**0.5)
Eqn bl=mag((real((acos(A)*360)/(2*PI))))
Eqn Mat=stoabcd(S,PORTZ(1))
Eqn bl_imag=mag((imag((acos(A)*360)/(2*PI))))
(2.10)
Y los resultados se muestran a continuación en la figura 2-4.
2 3 4 51 6
-30
-25
-20
-15
-10
-5
-35
0
freq, GHz
dB(S
(2,1
))dB
(S(1
,1))
m1
m2
m1freq=dB(S(1,1))=-33.769
1.498GHz
m2freq=dB(S(1,1))=-26.720
4.460GHz
1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.51.0 6.0
100
200
300
400
0
500
freq, GHz
mag
(re
al(Z
B))
m5 m6
m5freq=mag(real(ZB))=71.701
1.498GHz
m6freq=mag(real(ZB))=69.134
4.460GHz
(a) (b)
1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.51.0 6.0
50
100
150
200
0
250
freq, GHz
bl
m3
m4
bl_
imag
m3freq=bl=89.596
1.498GHzm4freq=bl=148.079
4.460GHz
(c)
Figura 2-4 – Resultados obtenidos al simular el layout mostrado en la figura 2-4. En la figura 2-4 (a) se muestran las dos frecuencias a las que deberá trabajar el
dispositivo. Es importante que las frecuencias no sean múltiples para evidenciar que el
dispositivo funciona realmente en banda dual. Las frecuencias a las que deberá operar el
inversor no son importantes, por lo que el proceso de diseño será más flexible.
Para realizar el diseño del inversor se partió de una celda cuyo funcionamiento estaba
centrado en 1.5GHz, por lo tanto, a esa frecuencia el parámetro S21 (referente al coeficiente de
transmisión) presenta un máximo, el S11 (referente al coeficiente de reflexión) un mínimo, la
impedancia bloch es de 71.70Ω (sólo hay 1Ω de error) y la fase es de casi 90º, que era lo
esperado. Ahora se debería ajustar la segunda frecuencia para tener un comportamiento dual,
pero resulta imposible ajustar la segunda frecuencia sin que los cambios afecten a la primera,
por lo que se deberá ajustar las dos frecuencias a la vez. El proceso de diseño se realizará
mediante la optimización de la celda base y resultará un tanto largo y laborioso, pero por el
momento es el único método de diseño conocido.
35
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
Para conseguir que el inversor tenga el comportamiento deseado se podrá modificar
cualquier parámetro del layout teniendo en cuenta los límites de fabricación y que el strip
central nunca debería solaparse con los anillos. En un momento dado, si esto llegara a suceder
se podría descentrar un poco los anillos respeto al gap capacitivo para ganar un poco de espacio,
pero si se desplazaran mucho podría llegar a afectar a la excitación de los anillos y esto si que
tendría consecuencias negativas.
Modificando la longitud de la línea se varía la fase, pero esto no es suficiente para
ajustar las dos frecuencias. Esta modificación, que hace variar la inductancia L del modelo
equivalente mostrado en la figura 1-20 (b), al ser la más fácil de realizar y la que presenta unos
efectos más controlables, es la idónea para terminar de ajustar la respuesta cuando se esté cerca
de obtener el resultado esperado. Modificando el largo del strip se podrían llegar a ganar unos
5º, pero difícilmente más. Además, se debe tener presente que la fase que aumenta en una banda
disminuye en la otra, por lo que se debe conseguir que la respuesta se quede por encima de la
fase deseada en una y por debajo en la otra para en último lugar poder ajustar solamente con la
longitud.
Otra variación que se puede realizar sobre el diseño y que también afecta a la L del
modelo en elementos discretos, es la modificación del ancho del strip. La modificación de este
parámetro tiene su consecuencia más directa sobre las impedancias, aunque las frecuencias de
resonancia y la fase también se ven afectadas. Ensanchando la línea bajan las frecuencias de
resonancia, la de la banda diestra (la segunda) más que la zurda (la primera), y la fase de la
primera banda decrece en mayor proporción que la de la segunda banda.
La última modificación que se puede realizar sobre la línea es con el gap capacitivo, que
se representa mediante la Cg en el modelo de elementos discretos, aunque esta modificación
también alterará el valor de la capacidad C de la figura 1-20 (b). Para tener más libertad se
pueden usar las capacidades interdigitales, que permiten especificar el número de “dedos”,
grosores, longitud de los dedos, etc. Aumentando esta capacidad baja la frecuencia de
resonancia de la rama serie y la banda diestra de transmisión se acerca a la zurda. En principio,
esta modificación no debería tener grandes efectos en la banda zurda, pero evidentemente
algunos habrá.
Si modificando todos estos parámetros del strip no es suficiente, se deberá proceder a
modificar también los resonadores. En el diseño realizado en este proyecto no se consiguió
obtener una respuesta satisfactoria modificando únicamente el strip, por lo que también se
modificaron los anillos.
Escalando los anillos y haciéndolos más grandes se consigue bajar las dos frecuencias
de resonancia, aumentar la fase de la banda zurda y bajar la de la banda diestra. Si además se
reduce el ancho del gap entre anillos aun baja más la fase de la banda diestra, que en un
principio es la que está más lejos de su valor de diseño. Separando los anillos se reduce la
36
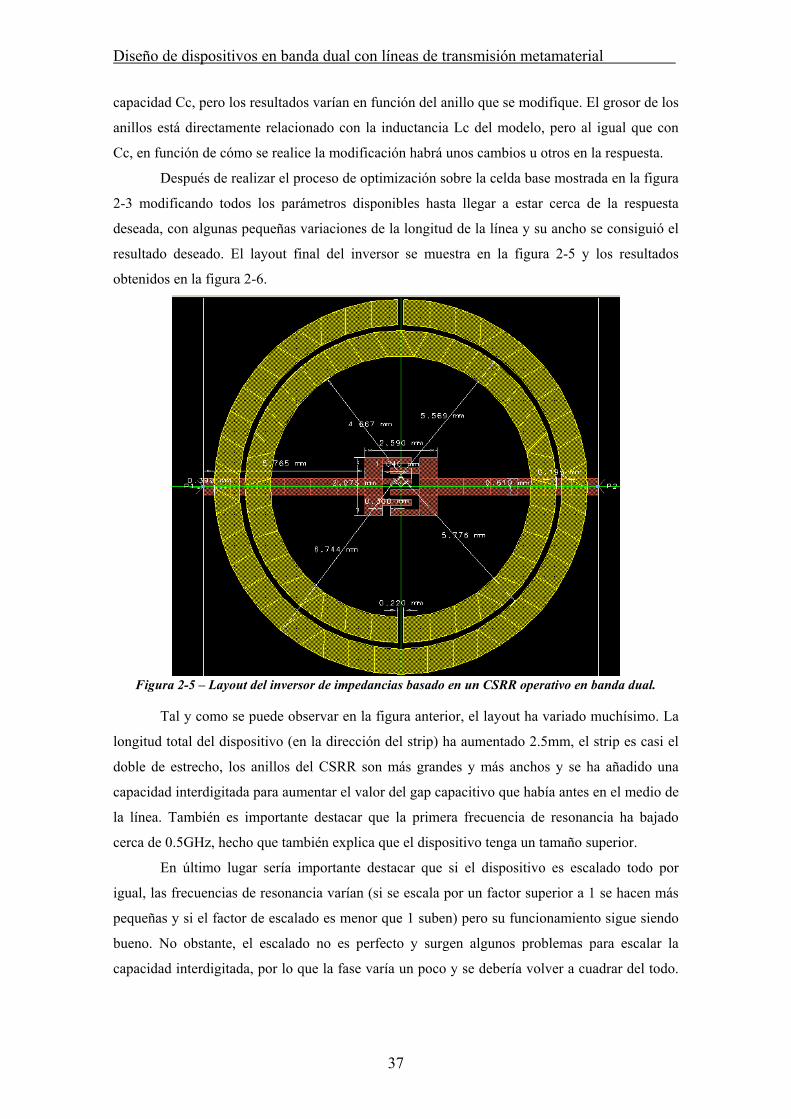
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
capacidad Cc, pero los resultados varían en función del anillo que se modifique. El grosor de los
anillos está directamente relacionado con la inductancia Lc del modelo, pero al igual que con
Cc, en función de cómo se realice la modificación habrá unos cambios u otros en la respuesta.
Después de realizar el proceso de optimización sobre la celda base mostrada en la figura
2-3 modificando todos los parámetros disponibles hasta llegar a estar cerca de la respuesta
deseada, con algunas pequeñas variaciones de la longitud de la línea y su ancho se consiguió el
resultado deseado. El layout final del inversor se muestra en la figura 2-5 y los resultados
obtenidos en la figura 2-6.
Figura 2-5 – Layout del inversor de impedancias basado en un CSRR operativo en banda dual.
Tal y como se puede observar en la figura anterior, el layout ha variado muchísimo. La
longitud total del dispositivo (en la dirección del strip) ha aumentado 2.5mm, el strip es casi el
doble de estrecho, los anillos del CSRR son más grandes y más anchos y se ha añadido una
capacidad interdigitada para aumentar el valor del gap capacitivo que había antes en el medio de
la línea. También es importante destacar que la primera frecuencia de resonancia ha bajado
cerca de 0.5GHz, hecho que también explica que el dispositivo tenga un tamaño superior.
En último lugar sería importante destacar que si el dispositivo es escalado todo por
igual, las frecuencias de resonancia varían (si se escala por un factor superior a 1 se hacen más
pequeñas y si el factor de escalado es menor que 1 suben) pero su funcionamiento sigue siendo
bueno. No obstante, el escalado no es perfecto y surgen algunos problemas para escalar la
capacidad interdigitada, por lo que la fase varía un poco y se debería volver a cuadrar del todo.
37
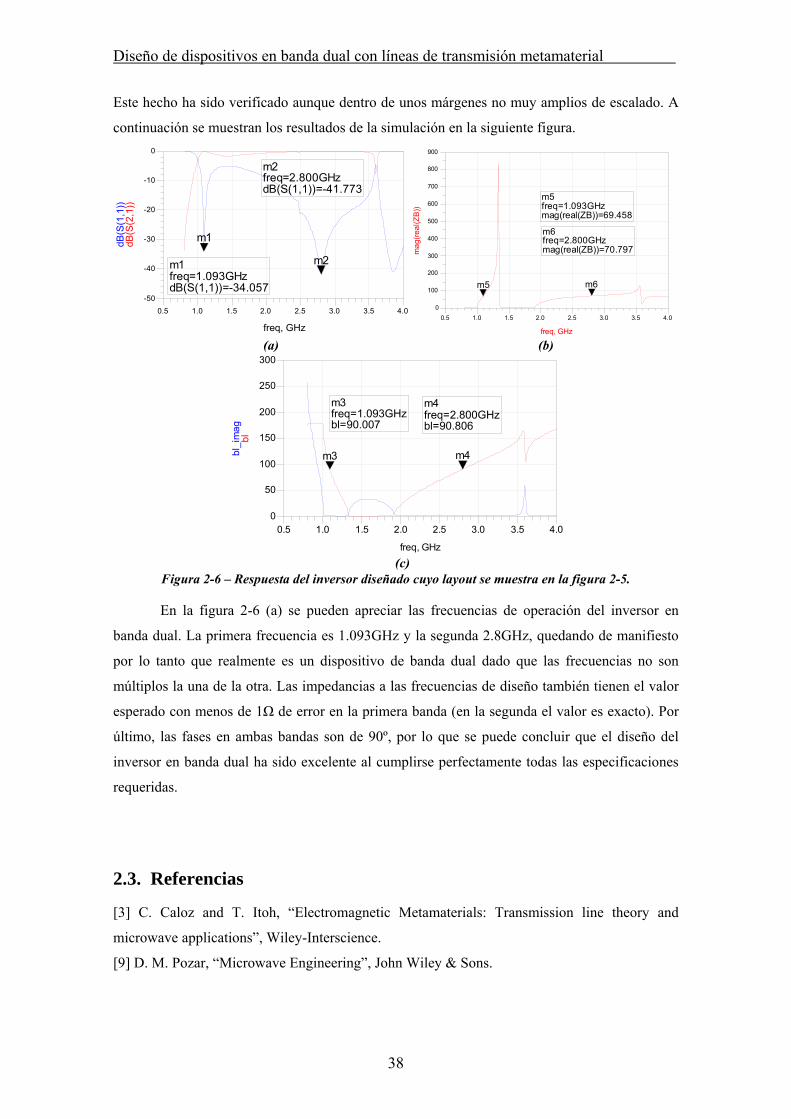
Diseño de dispositivos en banda dual con líneas de transmisión metamaterial
Este hecho ha sido verificado aunque dentro de unos márgenes no muy amplios de escalado. A
continuación se muestran los resultados de la simulación en la siguiente figura.
1.0 1.5 2.0 2.5 3.0 3.50.5 4.0
-40
-30
-20
-10
-50
0
freq, GHz
dB(S
(2,1
))dB
(S(1
,1))
m1
m2m1freq=dB(S(1,1))=-34.057
1.093GHz
m2freq=dB(S(1,1))=-41.773
2.800GHz
1.0 1.5 2.0 2.5 3.0 3.50.5 4.0
100
200
300
400
500
600
700
800
0
900
freq, GHz
ma
g(re
al(Z
B))
m5 m6
m5freq=mag(real(ZB))=69.458
1.093GHz
m6freq=mag(real(ZB))=70.797
2.800GHz
(a) (b)
1.0 1.5 2.0 2.5 3.0 3.50.5 4.0
50
100
150
200
250
0
300
freq, GHz
bl
m3 m4bl_
ima
g
m3freq=bl=90.007
1.093GHzm4freq=bl=90.806
2.800GHz
(c)
Figura 2-6 – Respuesta del inversor diseñado cuyo layout se muestra en la figura 2-5. En la figura 2-6 (a) se pueden apreciar las frecuencias de operación del inversor en
banda dual. La primera frecuencia es 1.093GHz y la segunda 2.8GHz, quedando de manifiesto
por lo tanto que realmente es un dispositivo de banda dual dado que las frecuencias no son
múltiplos la una de la otra. Las impedancias a las frecuencias de diseño también tienen el valor
esperado con menos de 1Ω de error en la primera banda (en la segunda el valor es exacto). Por
último, las fases en ambas bandas son de 90º, por lo que se puede concluir que el diseño del
inversor en banda dual ha sido excelente al cumplirse perfectamente todas las especificaciones
requeridas.
2.3. Referencias
[3] C. Caloz and T. Itoh, “Electromagnetic Metamaterials: Transmission line theory and
microwave applications”, Wiley-Interscience.
[9] D. M. Pozar, “Microwave Engineering”, John Wiley & Sons.
38
Aplicación al diseño de un divisor de potencia en banda dual
Capítulo 3 – Aplicación al diseño de un
divisor de potencia en banda dual
3.1. Introducción a los divisores de potencia
Un divisor de potencia es un dispositivo capaz de repartir la potencia que recibe por su
puerto de entrada entre un número n de salidas, habitualmente de forma equitativa. Los
divisores de potencia son utilizados en radiofrecuencia (RF) y microondas (MW),
comunicaciones ópticas, etc. para enviar a varios dispositivos la potencia recibida por un solo
puerto manteniendo las impedancias adaptadas a fin de tener un bajo nivel de potencia reflejada.
En el caso de un divisor de potencia de tres puertos, el dispositivo se puede caracterizar
mediante una matriz de parámetros S con nueve parámetros independientes:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
333231
232221
131211
SSSSSSSSS
S con jkVj
iij
kVV
S≠∀=
+
−
+
=,0
(3.1)
39

Aplicación al diseño de un divisor de potencia en banda dual
Si el dispositivo es de naturaleza pasiva y no contiene materiales anisótropos1 deberá
ser reciproco y por lo tanto, la matriz será simétrica, Sij=Sji.
Para que el dispositivo esté adaptado en los tres puertos se tiene que cumplir (3.2).
0332211 === SSS (3.2)
Por lo que la matriz mostrada en (3.1) quedará de la siguiente manera:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
00
0
3231
2321
1312
SSSSSS
S (3.3)
Además, para que el dispositivo sea pasivo y sin pérdidas también se deberá cumplir la
siguiente relación:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
100010001
00
0
00
0
*32
*31
*23
*21
*13
*12
3231
2321
1312
SSSSSS
SSSSSS
(3.4)
Para que una red pasiva y sin pérdidas de 3 puertos esté adaptada deberán cumplirse las
6 ecuaciones mostradas en (3.5).
1213
212 =+ SS (3.5)a
1223
212 =+ SS (3.5)b
1223
213 =+ SS (3.5)c
012*
13 =⋅ SS (3.5)d
013*
23 =⋅ SS (3.5)e
023*
12 =⋅ SS (3.5)f
Para que se puedan cumplir todas las ecuaciones mostradas en (3.5), como mínimo 2
elementos deben valer cero. No obstante, con esta imposición se imposibilita que se cumplan
todas las especificaciones, por lo tanto, es imposible que exista una red pasiva y sin pérdidas de
3 puertos, de modo que se deberá relajar alguna condición. Si se sacrifica la reciprocidad, el
dispositivo resultante se conoce como circulador, cuya matriz de parámetros S se muestra en
(3.6).
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=00
0000
θ
θ
θ
j
j
j
ee
eS ó [ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=0000
00
θ
θ
θ
j
j
j
ee
eS (3.6)
1 Medios, generalmente cristalinos, en los que alguna propiedad física depende de la dirección de un agente.
40
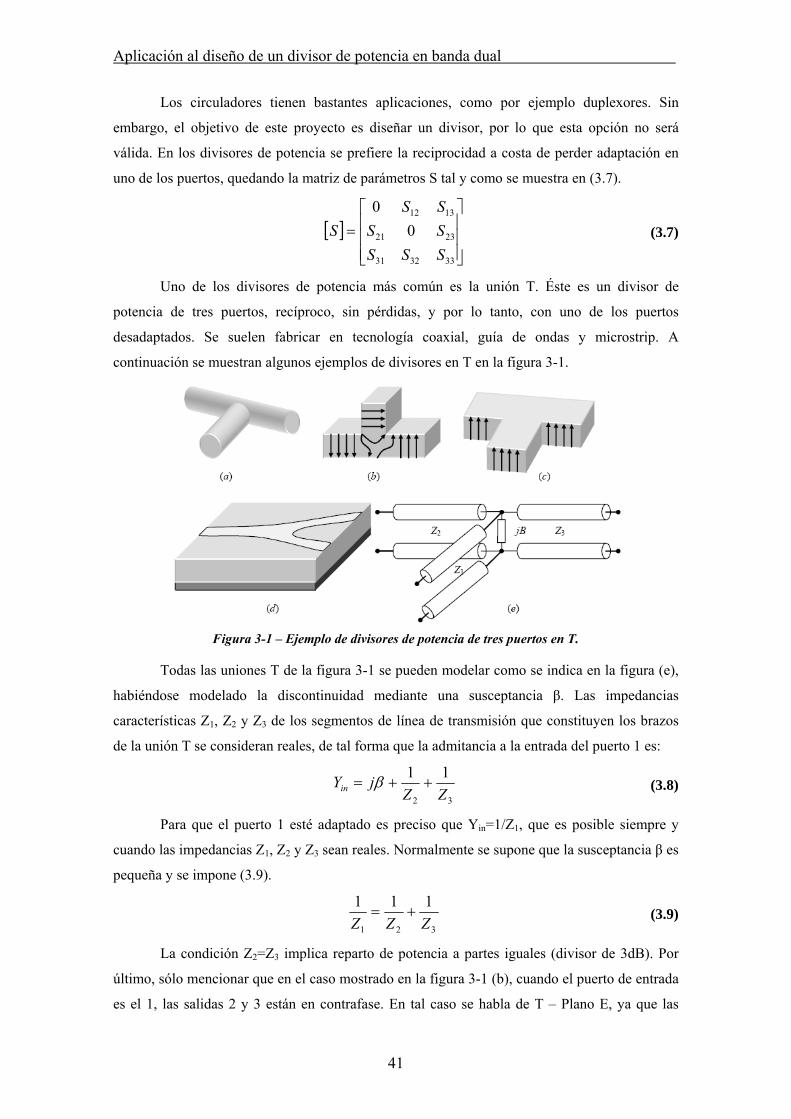
Aplicación al diseño de un divisor de potencia en banda dual
Los circuladores tienen bastantes aplicaciones, como por ejemplo duplexores. Sin
embargo, el objetivo de este proyecto es diseñar un divisor, por lo que esta opción no será
válida. En los divisores de potencia se prefiere la reciprocidad a costa de perder adaptación en
uno de los puertos, quedando la matriz de parámetros S tal y como se muestra en (3.7).
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
333231
2321
1312
00
SSSSSSS
S (3.7)
Uno de los divisores de potencia más común es la unión T. Éste es un divisor de
potencia de tres puertos, recíproco, sin pérdidas, y por lo tanto, con uno de los puertos
desadaptados. Se suelen fabricar en tecnología coaxial, guía de ondas y microstrip. A
continuación se muestran algunos ejemplos de divisores en T en la figura 3-1.
Figura 3-1 – Ejemplo de divisores de potencia de tres puertos en T.
Todas las uniones T de la figura 3-1 se pueden modelar como se indica en la figura (e),
habiéndose modelado la discontinuidad mediante una susceptancia β. Las impedancias
características Z1, Z2 y Z3 de los segmentos de línea de transmisión que constituyen los brazos
de la unión T se consideran reales, de tal forma que la admitancia a la entrada del puerto 1 es:
32
11ZZ
jYin ++= β (3.8)
Para que el puerto 1 esté adaptado es preciso que Yin=1/Z1, que es posible siempre y
cuando las impedancias Z1, Z2 y Z3 sean reales. Normalmente se supone que la susceptancia β es
pequeña y se impone (3.9).
321
111ZZZ
+= (3.9)
La condición Z2=Z3 implica reparto de potencia a partes iguales (divisor de 3dB). Por
último, sólo mencionar que en el caso mostrado en la figura 3-1 (b), cuando el puerto de entrada
es el 1, las salidas 2 y 3 están en contrafase. En tal caso se habla de T – Plano E, ya que las
41

Aplicación al diseño de un divisor de potencia en banda dual
líneas del campo eléctrico están contenidas en el plano de la T. Por el mismo motivo, la figura
(c) se conoce como T – Plano H.
Una vez vistos los divisores de potencia de un modo general procederemos a estudiar
los divisores de potencia implementados con inversores de impedancias, cuyas características
especiales los harán propicios para el desarrollo del dispositivo que en este proyecto se propone
diseñar e implementar.
3.1.1. Divisores de potencia implementados con inversores de impedancias
En la sección anterior se han introducido los divisores de potencia de manera general. A
lo largo de esta sección se verá como es posible implementarlos mediante inversores de
impedancias. Se partirá de un caso general en que el inversor de impedancias se implementa
mediante una línea de transmisión de λ/4 y en el apartado 3.2. se substituirá esta línea de
transmisión por el inversor de impedancias basado en CSRR diseñado en la sección 2.2. para
implementar un divisor de potencia en banda dual.
Mediante un esquema basado en líneas de transmisión como el mostrado en la figura
3-2, es posible diseñar un divisor de potencia adaptado a la entrada y balanceado en los puertos
de salida. Las longitudes de las redes de acceso d y d2 podrán ser arbitrarias siempre y cuando
presenten una impedancia característica Z0.
Figura 3-2 – Divisor de potencia mediante líneas de transmisión.
Como se puede observar en la figura 3-2, con la finalidad de cumplir con la adaptación
en el puerto de entrada (ecuación (3.10)) se utilizan líneas de transmisión de longitud λ/4 e
impedancia característica 2' 00 ZZ = .
0
01
111 0
32
ZZab
S inaa
=⇒====
(3.10)
No obstante, los puertos de salida no estarán ni adaptados (S22 y S33 ≠ 0) ni aislados (S23
y S32 ≠ 0). La matriz de parámetros S que definirá a la red resulta muy sencilla de obtener [9] y
se muestra en (3.11).
42

Aplicación al diseño de un divisor de potencia en banda dual
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
21
21
2
21
21
2
220
j
j
jj
S (3.11)
Para obtener un divisor de potencia se debe tener la fase de ±90º dado que con ±180º
correspondería a conectar las cargas directamente en paralelo, no habría transformación en el
valor de la impedancia y habría desadaptación. Para poder hallar la impedancia característica de
la línea de transmisión de longitud eléctrica λ/4 se deben desplazar las impedancias de carga de
los puertos 2 y 3, aplicando para ello la regla del transformador en cuarto de onda (expresión
(2.9)) y después realizar el paralelo entre las dos líneas de los puertos 2 y 3 del divisor e igualar
la impedancia característica de la línea de transmisión.
Figura 3-3 – Circuito a analizar para hallar la impedancia de entrada en el puerto 1.
En la figura 3-3 se muestra el circuito equivalente a analizar para encontrar el valor de
la impedancia de entrada. Haciendo los cálculos mostrados en (3.12) se obtiene que la
impedancia de entrada debe valer 20ZZa = .
22 00
0
2
0
2
3
0
2
2
ZZaZZ
ZaZp
ZZ
Z
ZZ
ZZoZin
ad
ad
=⇒⎯⎯ →⎯=
⎪⎪⎭
⎪⎪⎬
⎫
=
== (3.12)
Para poder obtener los parámetros de transmisión entre los puertos 1 y 2 se debe cargar
el puerto 3 con la impedancia característica, desplazarla al plano de referencia del divisor y
analizar la red como una red de dos puertos. Es importante destacar que se deberá considerar la
tensión a lo largo de la línea de transmisión.
Figura 3-4 – Circuito a analizar para hallar el parámetro de transmisión entre el puerto 1 y los
puertos 2 o 3.
A continuación, en (3.13) se analizará el circuito mostrado en la figura 3-4 para poder
obtener los parámetros de transmisión.
43

Aplicación al diseño de un divisor de potencia en banda dual
( ) ( )( )
( )( )
( )( ) ( )
( ) ( ) ( )−+−−+
−+−+
−+−−+
=
−+
−+
===
−=⇒−=
⎩⎨⎧
−−=+−==+==
+=
−=−⎯⎯⎯ →⎯
→⋅
−=+−−
==+=
VVZ
IeVeVZ
I
VVjjVjVdVVVVVV
eVeVV
jZ
Zj
VZIj
VVVVj
VVS
VVS
zjzj
zjzj
ZIV
ZZaa L
210
21
0
21
22
020)1(
00
2
1
0
02
00
0
1
211
01
221
0
032
ββ
ββ
(3.13)
Llegados a este punto, la submatriz construida con los puertos 2 y 3 se puede obtener
fácilmente y de manera compacta aplicando la propiedad de simetría una vez el puerto 1 ha sido
cargado con la impedancia característica de la línea de transmisión tal y como se muestra en
(3.14).
[ ]
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
−
−−
=
3332
2322
2
2
220
SSj
SSj
jj
S (3.14)
Una vez estudiado el caso general se procederá a diseñar un divisor de potencia con
inversores de impedancias donde el inversor estará basado en resonadores de anillos abiertos
complementarios, por lo que aportará un comportamiento en banda dual que únicamente con
líneas de transmisión sería imposible de conseguir.
3.2. Diseño de un divisor de potencia en banda dual mediante líneas
metamateriales basadas en CSRRs
En la figura 3-2 se mostró como se debería implementar un divisor de potencia
mediante inversores de impedancias y en la figura 2-5 se presentó el layout final de un inversor
de impedancias basado en un CSRR operativo en banda dual. A continuación se empleará el
inversor de impedancias mostrado en la figura 2-5, cuya impedancia característica era de
70.71Ω ( 250 ), para construir un inversor como el mostrado en la figura 3-2. Dado que los
anillos tienen un radio bastante grande, la mejor configuración será la T, evitando con ella
acoplos no deseados entre los anillos de los dos inversores.
Anteriormente también se vio que las líneas de acceso podrían tener cualquier longitud
mientras se respetara la impedancia característica Z0. Estas líneas servirán para conectar ambos
44
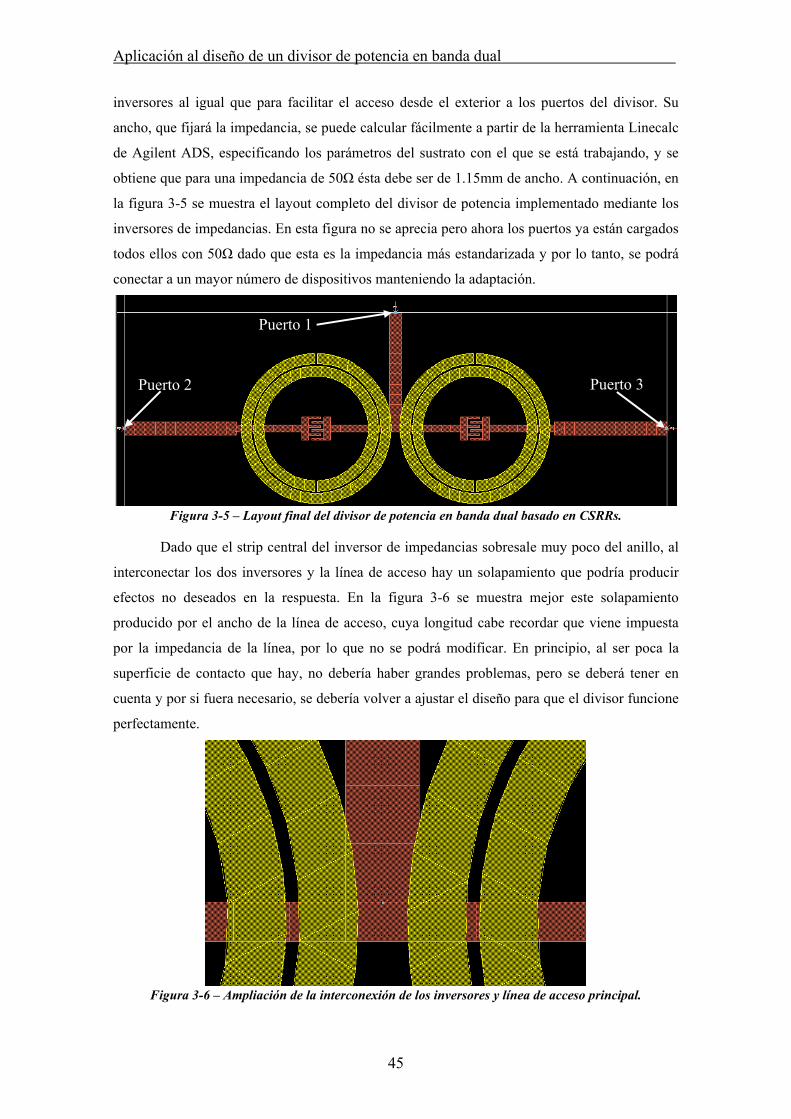
Aplicación al diseño de un divisor de potencia en banda dual
inversores al igual que para facilitar el acceso desde el exterior a los puertos del divisor. Su
ancho, que fijará la impedancia, se puede calcular fácilmente a partir de la herramienta Linecalc
de Agilent ADS, especificando los parámetros del sustrato con el que se está trabajando, y se
obtiene que para una impedancia de 50Ω ésta debe ser de 1.15mm de ancho. A continuación, en
la figura 3-5 se muestra el layout completo del divisor de potencia implementado mediante los
inversores de impedancias. En esta figura no se aprecia pero ahora los puertos ya están cargados
todos ellos con 50Ω dado que esta es la impedancia más estandarizada y por lo tanto, se podrá
conectar a un mayor número de dispositivos manteniendo la adaptación.
Figura 3-5 – Layout final del divisor de potencia en banda dual basado en CSRRs.
Puerto 1
Puerto 3 Puerto 2
Dado que el strip central del inversor de impedancias sobresale muy poco del anillo, al
interconectar los dos inversores y la línea de acceso hay un solapamiento que podría producir
efectos no deseados en la respuesta. En la figura 3-6 se muestra mejor este solapamiento
producido por el ancho de la línea de acceso, cuya longitud cabe recordar que viene impuesta
por la impedancia de la línea, por lo que no se podrá modificar. En principio, al ser poca la
superficie de contacto que hay, no debería haber grandes problemas, pero se deberá tener en
cuenta y por si fuera necesario, se debería volver a ajustar el diseño para que el divisor funcione
perfectamente.
Figura 3-6 – Ampliación de la interconexión de los inversores y línea de acceso principal.
45
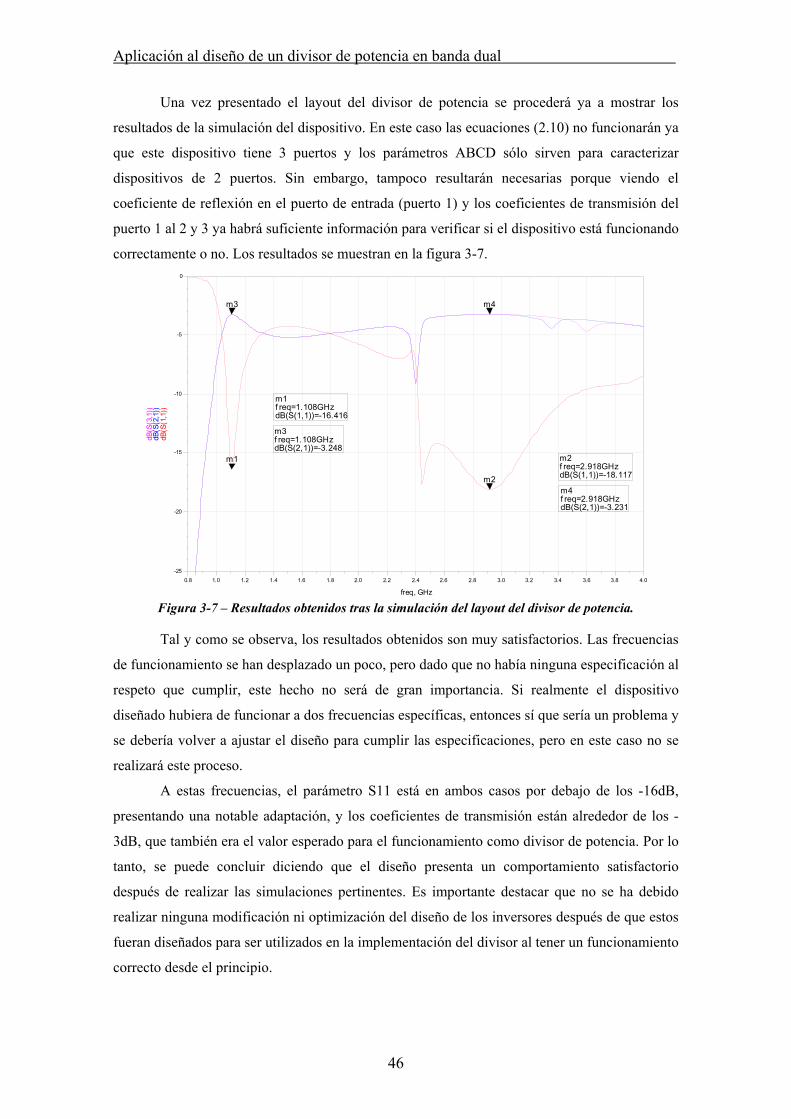
Aplicación al diseño de un divisor de potencia en banda dual
Una vez presentado el layout del divisor de potencia se procederá ya a mostrar los
resultados de la simulación del dispositivo. En este caso las ecuaciones (2.10) no funcionarán ya
que este dispositivo tiene 3 puertos y los parámetros ABCD sólo sirven para caracterizar
dispositivos de 2 puertos. Sin embargo, tampoco resultarán necesarias porque viendo el
coeficiente de reflexión en el puerto de entrada (puerto 1) y los coeficientes de transmisión del
puerto 1 al 2 y 3 ya habrá suficiente información para verificar si el dispositivo está funcionando
correctamente o no. Los resultados se muestran en la figura 3-7.
1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 3.2 3.4 3.6 3.80.8 4.0
-20
-15
-10
-5
-25
0
freq, GHz
dB(S
(1,1
))
m1
m2
dB(S
(2,1
))
m3 m4
dB(S
(3,1
))
m1f req=dB(S(1,1))=-16.416
1.108GHz
m2f req=dB(S(1,1))=-18.117
2.918GHz
m3f req=dB(S(2,1))=-3.248
1.108GHz
m4f req=dB(S(2,1))=-3.231
2.918GHz
Figura 3-7 – Resultados obtenidos tras la simulación del layout del divisor de potencia.
Tal y como se observa, los resultados obtenidos son muy satisfactorios. Las frecuencias
de funcionamiento se han desplazado un poco, pero dado que no había ninguna especificación al
respeto que cumplir, este hecho no será de gran importancia. Si realmente el dispositivo
diseñado hubiera de funcionar a dos frecuencias específicas, entonces sí que sería un problema y
se debería volver a ajustar el diseño para cumplir las especificaciones, pero en este caso no se
realizará este proceso.
A estas frecuencias, el parámetro S11 está en ambos casos por debajo de los -16dB,
presentando una notable adaptación, y los coeficientes de transmisión están alrededor de los -
3dB, que también era el valor esperado para el funcionamiento como divisor de potencia. Por lo
tanto, se puede concluir diciendo que el diseño presenta un comportamiento satisfactorio
después de realizar las simulaciones pertinentes. Es importante destacar que no se ha debido
realizar ninguna modificación ni optimización del diseño de los inversores después de que estos
fueran diseñados para ser utilizados en la implementación del divisor al tener un funcionamiento
correcto desde el principio.
46
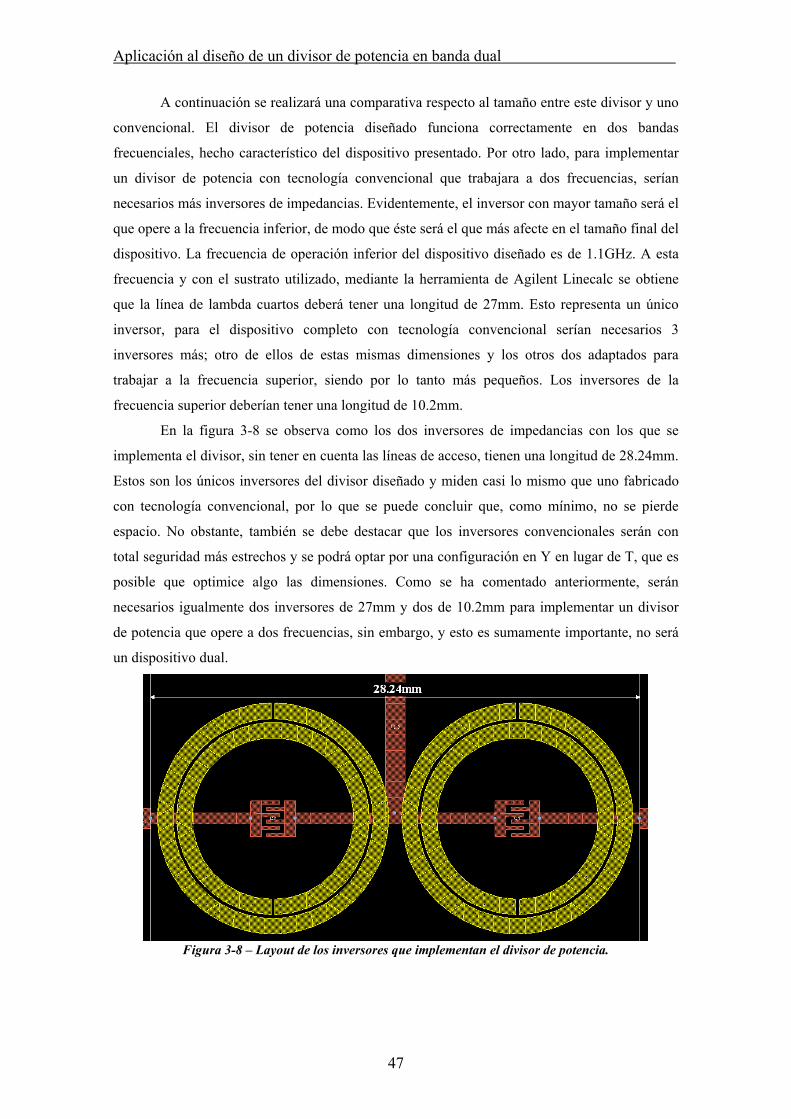
Aplicación al diseño de un divisor de potencia en banda dual
A continuación se realizará una comparativa respecto al tamaño entre este divisor y uno
convencional. El divisor de potencia diseñado funciona correctamente en dos bandas
frecuenciales, hecho característico del dispositivo presentado. Por otro lado, para implementar
un divisor de potencia con tecnología convencional que trabajara a dos frecuencias, serían
necesarios más inversores de impedancias. Evidentemente, el inversor con mayor tamaño será el
que opere a la frecuencia inferior, de modo que éste será el que más afecte en el tamaño final del
dispositivo. La frecuencia de operación inferior del dispositivo diseñado es de 1.1GHz. A esta
frecuencia y con el sustrato utilizado, mediante la herramienta de Agilent Linecalc se obtiene
que la línea de lambda cuartos deberá tener una longitud de 27mm. Esto representa un único
inversor, para el dispositivo completo con tecnología convencional serían necesarios 3
inversores más; otro de ellos de estas mismas dimensiones y los otros dos adaptados para
trabajar a la frecuencia superior, siendo por lo tanto más pequeños. Los inversores de la
frecuencia superior deberían tener una longitud de 10.2mm.
En la figura 3-8 se observa como los dos inversores de impedancias con los que se
implementa el divisor, sin tener en cuenta las líneas de acceso, tienen una longitud de 28.24mm.
Estos son los únicos inversores del divisor diseñado y miden casi lo mismo que uno fabricado
con tecnología convencional, por lo que se puede concluir que, como mínimo, no se pierde
espacio. No obstante, también se debe destacar que los inversores convencionales serán con
total seguridad más estrechos y se podrá optar por una configuración en Y en lugar de T, que es
posible que optimice algo las dimensiones. Como se ha comentado anteriormente, serán
necesarios igualmente dos inversores de 27mm y dos de 10.2mm para implementar un divisor
de potencia que opere a dos frecuencias, sin embargo, y esto es sumamente importante, no será
un dispositivo dual.
Figura 3-8 – Layout de los inversores que implementan el divisor de potencia.
47
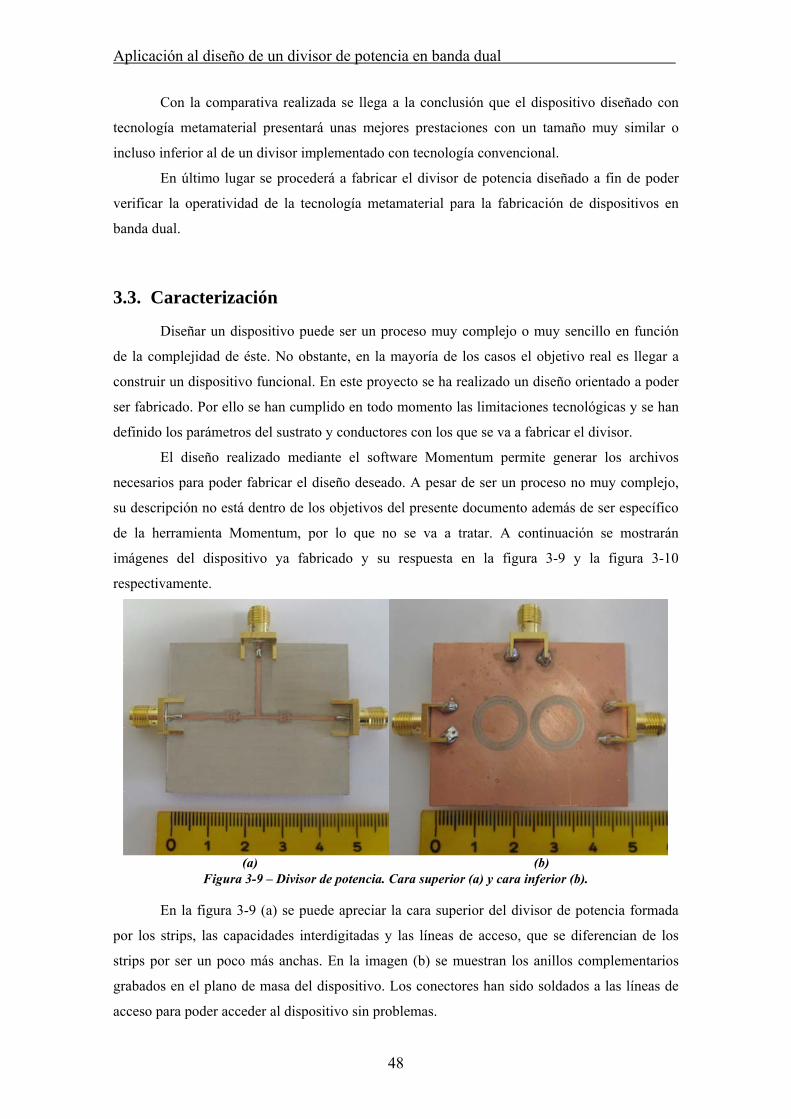
Aplicación al diseño de un divisor de potencia en banda dual
Con la comparativa realizada se llega a la conclusión que el dispositivo diseñado con
tecnología metamaterial presentará unas mejores prestaciones con un tamaño muy similar o
incluso inferior al de un divisor implementado con tecnología convencional.
En último lugar se procederá a fabricar el divisor de potencia diseñado a fin de poder
verificar la operatividad de la tecnología metamaterial para la fabricación de dispositivos en
banda dual.
3.3. Caracterización
Diseñar un dispositivo puede ser un proceso muy complejo o muy sencillo en función
de la complejidad de éste. No obstante, en la mayoría de los casos el objetivo real es llegar a
construir un dispositivo funcional. En este proyecto se ha realizado un diseño orientado a poder
ser fabricado. Por ello se han cumplido en todo momento las limitaciones tecnológicas y se han
definido los parámetros del sustrato y conductores con los que se va a fabricar el divisor.
El diseño realizado mediante el software Momentum permite generar los archivos
necesarios para poder fabricar el diseño deseado. A pesar de ser un proceso no muy complejo,
su descripción no está dentro de los objetivos del presente documento además de ser específico
de la herramienta Momentum, por lo que no se va a tratar. A continuación se mostrarán
imágenes del dispositivo ya fabricado y su respuesta en la figura 3-9 y la figura 3-10
respectivamente.
(a) (b)
Figura 3-9 – Divisor de potencia. Cara superior (a) y cara inferior (b). En la figura 3-9 (a) se puede apreciar la cara superior del divisor de potencia formada
por los strips, las capacidades interdigitadas y las líneas de acceso, que se diferencian de los
strips por ser un poco más anchas. En la imagen (b) se muestran los anillos complementarios
grabados en el plano de masa del dispositivo. Los conectores han sido soldados a las líneas de
acceso para poder acceder al dispositivo sin problemas.
48

Aplicación al diseño de un divisor de potencia en banda dual
Una vez construido el divisor se procederá a realizar las mediciones necesarias para
verificar si el dispositivo se comporta tal y como fue diseñado. Para ello se empleará un
analizador de redes. Los resultados de las mediciones se muestran en la figura 3-10. En esta
figura se representan los parámetros S11, S21 y S31 y queda patente que el dispositivo funciona
perfectamente. A las dos frecuencias de operación la adaptación sigue siendo satisfactoria, con
un nivel de -17dB en el S11 en la primera banda y de -25dB en la segunda. El coeficiente de
transmisión S21 ha bajado un poco en la primera banda, sin embargo, sigue siendo un valor
admisible y en la segunda resonancia tanto el S21 como el S31 están a -3dB, por lo que
podemos decir que se siguen cumpliendo las especificaciones del divisor.
Figura 3-10 – Resultado de las mediciones realizadas al divisor de potencia.
Los resultados de las mediciones y los obtenidos mediante la simulación son bastante
parecidos tal y como se muestra en la figura 3-11, si bien existe un pequeño desplazamiento en
frecuencia. La adaptación a la segunda frecuencia de operación se ha visto mejorada respecto al
valor obtenido con el diseño y los coeficientes de transmisión se mantienen igual a un valor
muy cercano a los -3dB especificados por el tipo de divisor que ha sido diseñado y construido.
Las pequeñas diferencias podrían ser debidas a muchas causas, pero efectos como un
plano de masa finito, imperfecciones en la capa de metal y dialéctico, las soldaduras y los
conectores no incluidos en el diseño, sean posiblemente los que más afecten al resultado. Este
hecho deja patente la fiabilidad de los resultados que es posible obtener actualmente con las
herramientas de diseño electromagnético como Momentum.
49
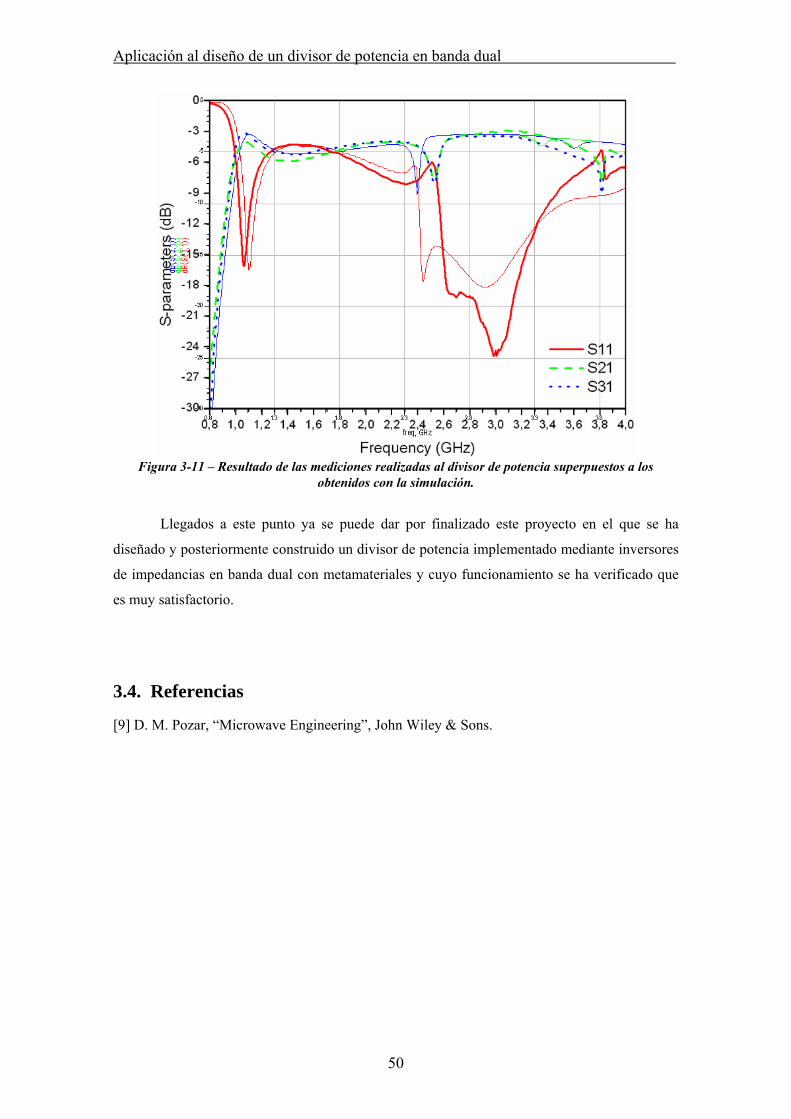
Aplicación al diseño de un divisor de potencia en banda dual
Figura 3-11 – Resultado de las mediciones realizadas al divisor de potencia superpuestos a los
obtenidos con la simulación.
Llegados a este punto ya se puede dar por finalizado este proyecto en el que se ha
diseñado y posteriormente construido un divisor de potencia implementado mediante inversores
de impedancias en banda dual con metamateriales y cuyo funcionamiento se ha verificado que
es muy satisfactorio.
3.4. Referencias
[9] D. M. Pozar, “Microwave Engineering”, John Wiley & Sons.
50

Conclusiones
Capítulo 4 – Conclusiones
Las estructuras metamateriales presentan algunas características que las hacen atractivas
para la fabricación de dispositivos con determinadas prestaciones. Una de ellas es la posibilidad
de controlar la relación de dispersión, permitiendo con ello la implementación de dispositivos
en banda dual. A lo largo de este trabajo se han tratado y estudiado estas estructuras así como su
uso para la creación de otras más complejas como inversores de impedancias y divisores de
potencia.
Al comienzo de este documento se introdujeron todos los conceptos cuyo conocimiento
era necesario para la comprensión del posterior trabajo. Se vio como nacieron los
metamateriales cuando se empezó a especular sobre los medios con ε y μ simultáneamente
negativas, y como esta característica conducía a materiales con propiedades exóticas. Tales
propiedades iban desde las ondas de retroceso, hasta la inversión de la ley de Snell y el efecto
Doppler. Con la dedicación de algunos grandes científicos, estos comportamientos
desembocaron en una nueva línea de investigación centrándose en temas como la creación de la
lente perfecta así como la posibilidad de crear dispositivos operativos en banda dual.
Posteriormente en el documento, con una firme base sobre el funcionamiento de los
metamateriales adquirida, se introdujeron estructuras algunas planares que manifestaban sus
51
Conclusiones
características. De este modo, se empezó a hablar de las líneas duales o compuestas y las líneas
basadas en modelos resonantes. Especial atención recibieron los resonadores de anillos abiertos
(SRRs) y sus homólogos complementarios (CSRRs) al ser éstos unas estructuras clave en la
creación de dispositivos con características propias de los metamateriales.
A continuación se empezó a tratar ya el diseño propiamente dicho de dispositivos
metamateriales. Se realizó un minucioso diseño de un inversor de impedancias basado en las
celdas previamente tratadas, concretamente los CSRRs, con la importante característica de
presentar funcionalidad en banda dual. La dualidad de banda se obtuvo mediante una única línea
de transmisión microstrip con un CSRR grabado en su plano de masa, hecho destacable a tener
en consideración.
Con el inversor ya diseñado se empezó a tratar otro nuevo dispositivo: los divisores de
potencia. Se introdujeron sus principales características así como algunas de sus posibles
implementaciones, viendo que una posibilidad era el uso de inversores de impedancias.
Finalmente se diseñó un divisor basado en el inversor ya estudiado, adoptando su característica
de funcionamiento en banda dual.
Todos los diseños fueron comprobados mediante simulaciones, obteniendo en todos
ellos resultados muy satisfactorios. Sin embargo, en este proyecto se fue un poco más allá y se
fabricó el divisor diseñado. El dispositivo construido fue medido y testeado, y presentaba unos
comportamientos como los mostrados en el diseño, funcionamiento en banda dual con
frecuencias de trabajo arbitrarias, buena adaptación a estas frecuencias y división de potencia de
forma equitativa en ambos puertos (-3dB). Los resultados obtenidos en las mediciones de este
dispositivo se podrían calificar nuevamente de muy buenos.
Valorando el conjunto de este proyecto, se puede concluir diciendo que se han
alcanzado todos los objetivos requeridos tanto en las simulaciones como en la implementación
del diseño, y por lo tanto, se dará así por finalizado el presente estudio.
No obstante, los metamateriales siguen en auge, y el proyecto realizado sólo es una
muestra de todo lo que se puede conseguir con esta nueva tecnología. En un futuro estudio, y
demostrada la viabilidad de la implementación de un divisor de potencia en banda dual,
resultaría interesante intentar diseñar otro divisor de potencia en banda dual en el que las
frecuencias de operación vinieran definidas por aplicaciones actuales como la identificación por
radio frecuencia (RFID).
La RFID está llamada a ser uno de los sistemas más importantes de los próximos años.
Sin embargo, presenta una importante salvedad, y es que no se ha conseguido crear un estándar
mundial en lo referente a frecuencias de operación. Actualmente, los sistemas de RFID
europeos y americanos funcionan a frecuencias distintas, haciendo imposible la importación
directa de productos desde un continente a otro con este sistema. Sería necesario un dispositivo
que realizará las tareas de interconexión entre ambos sistemas, y este es uno de los contextos
52

Conclusiones
donde los metamateriales, con sus características de operación en banda dual, pueden tener una
importante labor a desarrollar.
53

Firma del autor:
Resumen del TFC
El electromagnetismo es una rama de la física que está en continuo estudio. Hasta mediados de la década de los 60 se creía que para que la propagación de las ondas electromagnéticas fuera posible, los medios propagativos debían presentar una permitividad dieléctrica y una permeabilidad magnética simultáneamente positivas. Sin embargo, Víctor G. Veselago revolucionó la teoría electromagnética con la idea de los medios con ε y μ negativas, dando con ello origen a los medios metamateriales.
En el presente trabajo se estudiarán los principios físicos en los que se fundamentan los metamateriales. Se verán algunas de sus características que los convierten en medios exóticos y como éstas pueden ser utilizadas en el desarrollo de dispositivos con prestaciones difíciles de obtener con las tecnologías convencionales.
A continuación se aplicarán los conceptos tratados en el diseño de un inversor de impedancias implementado mediante resonadores en anillos abiertos complementarios. Este dispositivo, que presentará un funcionamiento en banda dual, será usado en el posterior diseño de un divisor de potencia. Finalmente se realizará la implementación física del divisor de potencia diseñado y se verificará su correcto funcionamiento con las mediciones pertinentes.
Resum del TFC
L’electromagnetisme és una branca de la física que està en continu estudi. Fins a mitjans de la dècada dels 60 es pensava que, per a la propagació de les ones electromagnètiques fos possible, els medis propagatius havien de presentar una permitivitat dielèctrica i una permeabilitat magnètica simultàniament positives. No obstant, Victor G. Veselago va revolucionar la teoria electromagnètica amb la idea dels medis amb ε i μ negatives, donant amb això origen als medis metamaterials. En el present treball s’estudiaran els principis físics en els que es fonamenten els metamaterials. Es veuran algunes de les seves característiques que els converteixen en medis exòtics i como aquestes poden ser utilitzades en el desenvolupament de dispositius amb prestacions difícils d’obtenir amb les tecnologies convencionals. A continuació s’aplicaran els conceptes tractats en el disseny d’un inversor d’impedàncies implementat mitjançant ressonadors en anells oberts complementaris. Aquest dispositiu, que presentarà un funcionament en banda dual, serà utilitzat en el posterior disseny d’un divisor de potencia. Finalment es realitzarà la implementació física del divisor de potencia dissenyat i es verificarà el seu correcte funcionament amb les mesures pertinents.
TFC’s Brief
Electromagnetism is a branch of physics which is under continuously consideration. Until the middle of 60th decade, it was thought so that the electromagnetic waves propagation were possible, the propagative’s mediums must present dielectric permittivity and magnetic permeability simultaneously positive. Nevertheless, Victor G. Veselago revolutionized the electromagnetic theory with the idea of mediums with negatives ε and μ, giving with it origin to the metamaterials.
In the present essay, the physical principles in which the metamaterials are based will be studied. It will be also showed some of their characteristics that turn them into exotics’ mediums and how they can be employed to develop new devices with performance features which are hard to obtain with the conventional technologies.
Then, the treated concepts will be applied into the design of impedances’ inverter implemented by complementary split ring resonators. This device, which will display dual band operation, will be used in the later design of a power divider. Finally, it will be realized the physical implementation of the designed power divider and their correct operation will be verified with the pertinent measurements.