Embed Size (px)
DESCRIPTION
equilibratura
Citation preview
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 123/6/2000
Equilibratura dei rotori (parte terza)Equilibratura dei rotori (parte terza)Paolo Toni

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 223/6/2000
Metodi per l’equilibratura dei rotori
• EQUILIBRATURA DI ROTORI RIGIDI: nel campo di velocità utilizzato nella fase di equilibratura il rotore non subisce deformazioni elastiche significative (in questa operazione il rotore può essere portato a girare a velocità superiori a quella massima di lavoro).
•EQUILIBRATURA DEI ROTORI FLESSIBILI: nel campo di velocitàutilizzato nella fase di equilibratura il rotore presenta deformazioni flessionali di entità significativa (in questa operazione il rotore può essere portato a girare a velocità superiori a quella massima di lavoro).
Definizioni:
ROTORE RIGIDO - un rotore che nel suo campo di lavoro non incontra deformazioni elastiche significative (il massimo numero di giri è al di sotto della prima velocità critica flessionale).
ROTORE FLESSIBILE - un rotore che nel suo campo di lavoro incontra deformazioni elastiche significative (il massimo numero di giri è al di sopra della prima velocità critica flessionale).
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 323/6/2000
Squilibrio - definizioni
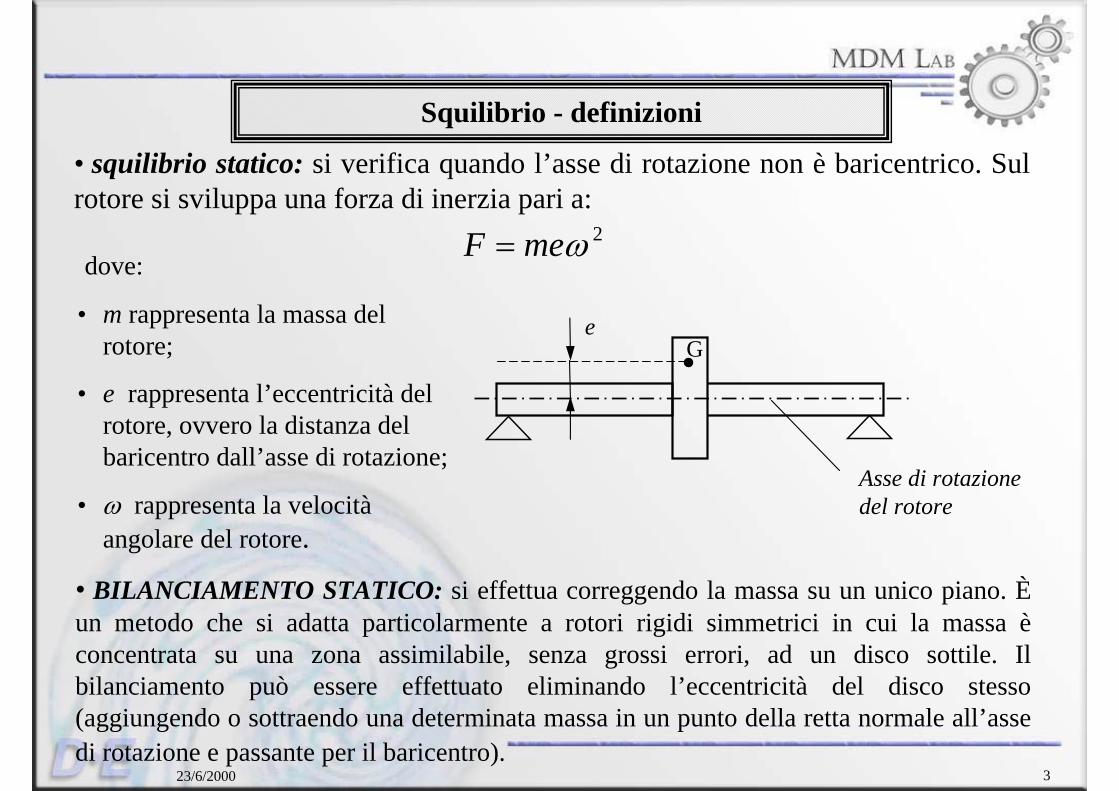
• squilibrio statico: si verifica quando l’asse di rotazione non è baricentrico. Sul rotore si sviluppa una forza di inerzia pari a:
2ωmeF =
• BILANCIAMENTO STATICO: si effettua correggendo la massa su un unico piano. Èun metodo che si adatta particolarmente a rotori rigidi simmetrici in cui la massa èconcentrata su una zona assimilabile, senza grossi errori, ad un disco sottile. Il bilanciamento può essere effettuato eliminando l’eccentricità del disco stesso (aggiungendo o sottraendo una determinata massa in un punto della retta normale all’asse di rotazione e passante per il baricentro).
dove:
• m rappresenta la massa del rotore;
• e rappresenta l’eccentricità del rotore, ovvero la distanza del baricentro dall’asse di rotazione;
• ω rappresenta la velocitàangolare del rotore.
Asse di rotazione del rotore
eG
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 423/6/2000
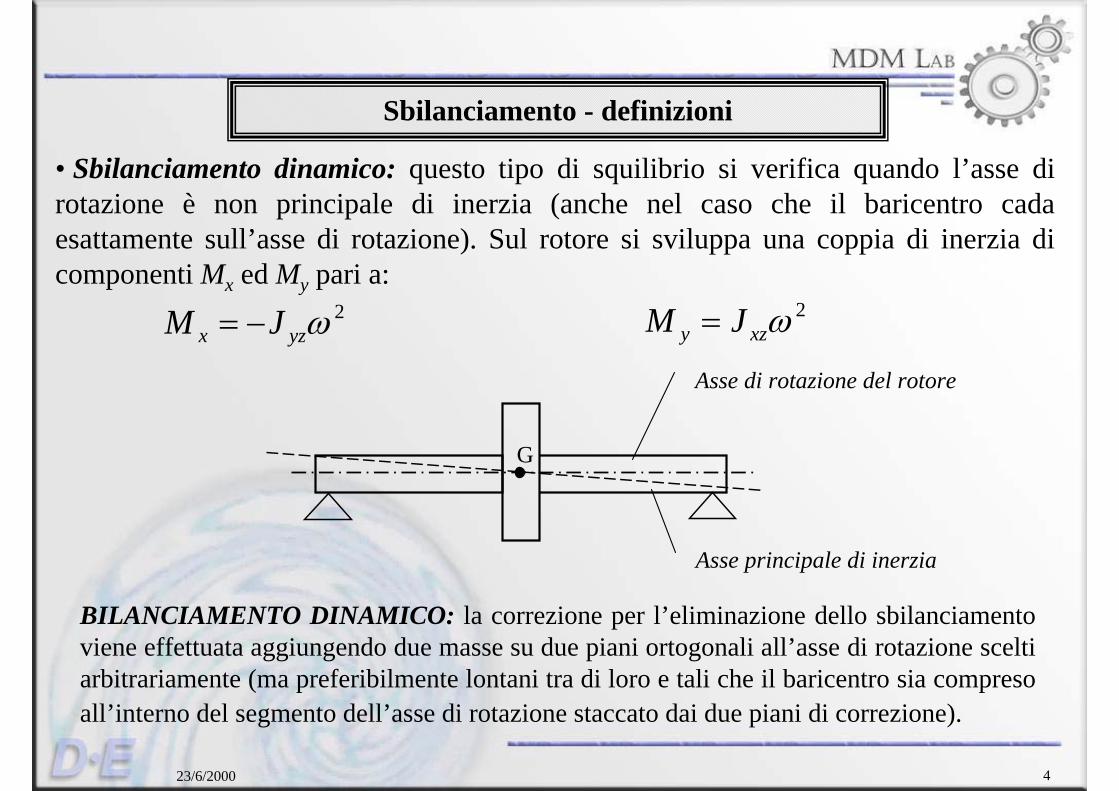
• Sbilanciamento dinamico: questo tipo di squilibrio si verifica quando l’asse di rotazione è non principale di inerzia (anche nel caso che il baricentro cada esattamente sull’asse di rotazione). Sul rotore si sviluppa una coppia di inerzia di componenti Mx ed My pari a:
2ωyzx JM −= 2ωxzy JM =
Sbilanciamento - definizioni
BILANCIAMENTO DINAMICO: la correzione per l’eliminazione dello sbilanciamento viene effettuata aggiungendo due masse su due piani ortogonali all’asse di rotazione scelti arbitrariamente (ma preferibilmente lontani tra di loro e tali che il baricentro sia compreso all’interno del segmento dell’asse di rotazione staccato dai due piani di correzione).
Asse di rotazione del rotore
G
Asse principale di inerzia
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 523/6/2000
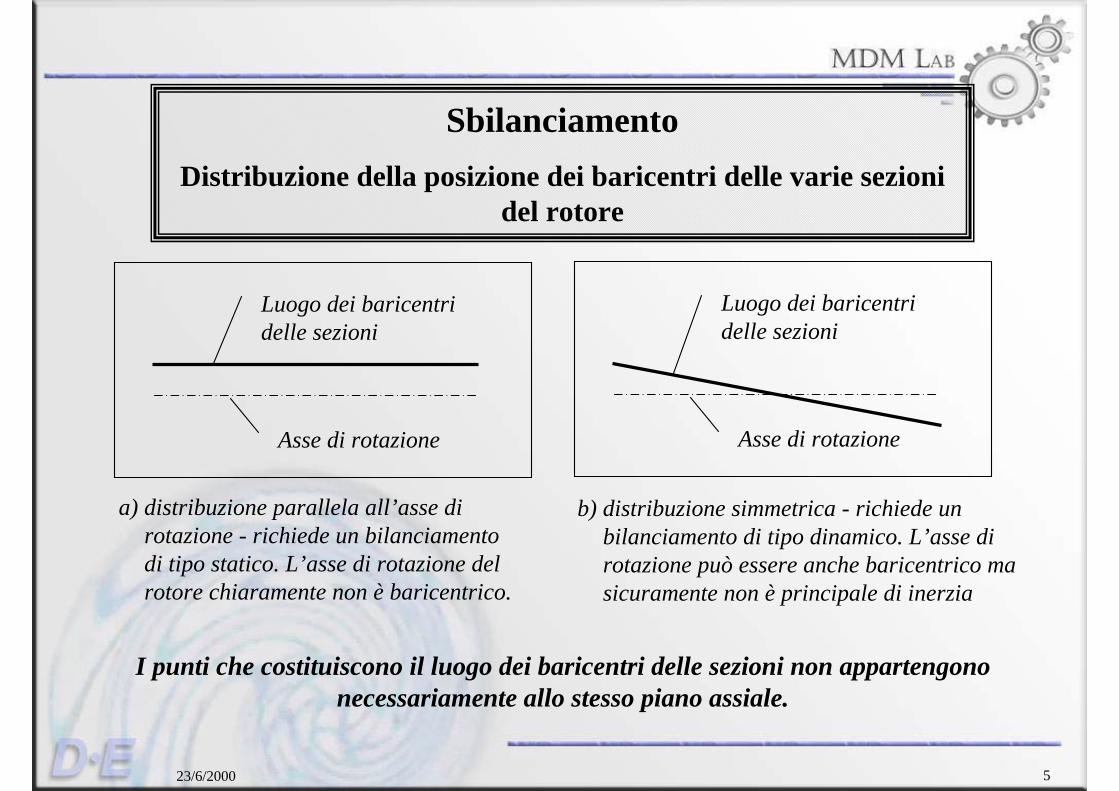
SbilanciamentoDistribuzione della posizione dei baricentri delle varie sezioni
del rotore
Asse di rotazione
Luogo dei baricentri delle sezioni
Asse di rotazione
Luogo dei baricentri delle sezioni
a) distribuzione parallela all’asse di rotazione - richiede un bilanciamento di tipo statico. L’asse di rotazione del rotore chiaramente non è baricentrico.
b) distribuzione simmetrica - richiede un bilanciamento di tipo dinamico. L’asse di rotazione può essere anche baricentrico ma sicuramente non è principale di inerzia
I punti che costituiscono il luogo dei baricentri delle sezioni non appartengono necessariamente allo stesso piano assiale.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 623/6/2000
Asse di rotazione
Luogo dei baricentri delle sezioni
Asse di rotazione
Luogo dei baricentri delle sezioni
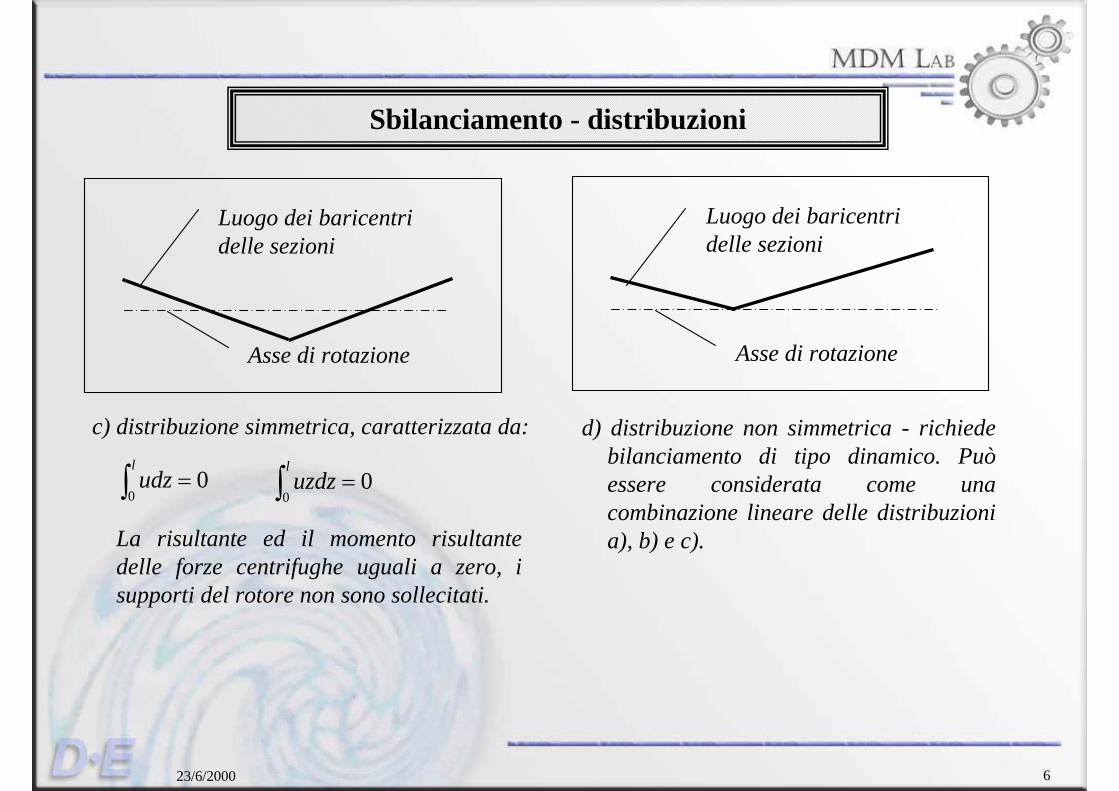
c) distribuzione simmetrica, caratterizzata da: d) distribuzione non simmetrica - richiede bilanciamento di tipo dinamico. Può essere considerata come una combinazione lineare delle distribuzioni a), b) e c).
Sbilanciamento - distribuzioni
∫ =ludz
0 0 ∫ =
luzdz
0 0
La risultante ed il momento risultante delle forze centrifughe uguali a zero, i supporti del rotore non sono sollecitati.

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 723/6/2000
Bilanciamento statico
Il rotore sbilanciato viene portato in rotazione e si misurano le vibrazioni a cui è sottoposto riportandone su un diagramma polare l’ampiezza e la fase (vettore U). Il sistema di riferimento è solidale con il rotore (quindi èrotante) l’origine è sull’asse di simmetria del rotore e l’asse x èun qualsiasi asse di riferimento su cui di solito, per identificarlo con certezza, viene applicato un segno.
Successivamente si aggiunge al rotore una massa nota in una posizione prefissata, lo si porta nuovamente in rotazione e si misurano l’ampiezza e la fase delle vibrazioni (vettore V).
La differenza D tra i vettori U (vibrazioni determinate dal solo sbilanciamento) e V (vibrazioni generate dallo sbilanciamento e dalla massa di prova) rappresenta l’effetto specifico della massa aggiunta sulle vibrazioni del rotore.
Per bilanciare il rotore è necessario introdurre (o eliminare) una massa aggiuntiva di valore e posizione angolare incognita ma tale che, con la sua introduzione, risulti D = -U, ovvero che le azioni della massa aggiuntiva equilibrino le forze di sbilanciamento.
UV
D
0°
90°
180°
270°
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 823/6/2000
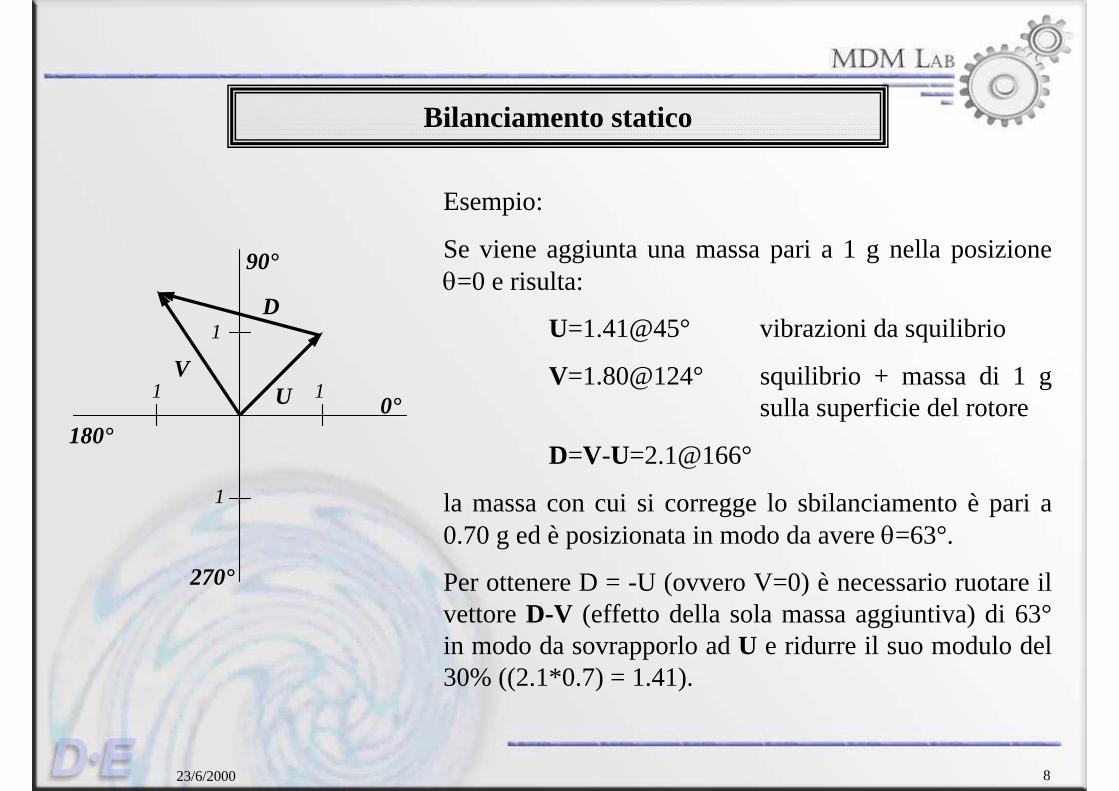
Esempio:
Se viene aggiunta una massa pari a 1 g nella posizione θ=0 e risulta:
U=1.41@45° vibrazioni da squilibrio
V=1.80@124° squilibrio + massa di 1 g sulla superficie del rotore
D=V-U=2.1@166°
la massa con cui si corregge lo sbilanciamento è pari a 0.70 g ed è posizionata in modo da avere θ=63°.
Per ottenere D = -U (ovvero V=0) è necessario ruotare il vettore D-V (effetto della sola massa aggiuntiva) di 63°in modo da sovrapporlo ad U e ridurre il suo modulo del 30% ((2.1*0.7) = 1.41).
Bilanciamento statico
UV
D
0°
90°
180°
270°
1
1
1
1

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 923/6/2000
Bilanciamento dinamico
Le macchine che consentono di effettuare il bilanciamento dinamico dei rotori si dividono sostanzialmente in due gruppi:
Macchine con supporti cedevoli:
•il rotore che deve essere bilanciato è appoggiato su due cuscinetti caratterizzati da un’elevata cedevolezza nella direzione verticale;•le frequenze critiche del sistema sono inferiori alla velocità di rotazione del rotore;•le vibrazioni del sistema hanno entità tale da consentire una misura dello spostamento sufficientemente accurata.
Macchine con supporti rigidi:
•il rotore viene montato su supporti molto rigidi su cui sono collocati dei trasduttori di forza;•le frequenze critiche sono superiori alla velocità di rotazione del sistema e di conseguenza le vibrazioni indotte dallo sbilanciamento (che hanno ampiezza molto limitata) e la forza esercitata sui due supporti sono in fase tra loro;•le forze misurate sui due supporti, se è nota la distribuzione di massa del rotore, possono essere direttamente correlate all’eccentricità.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1023/6/2000
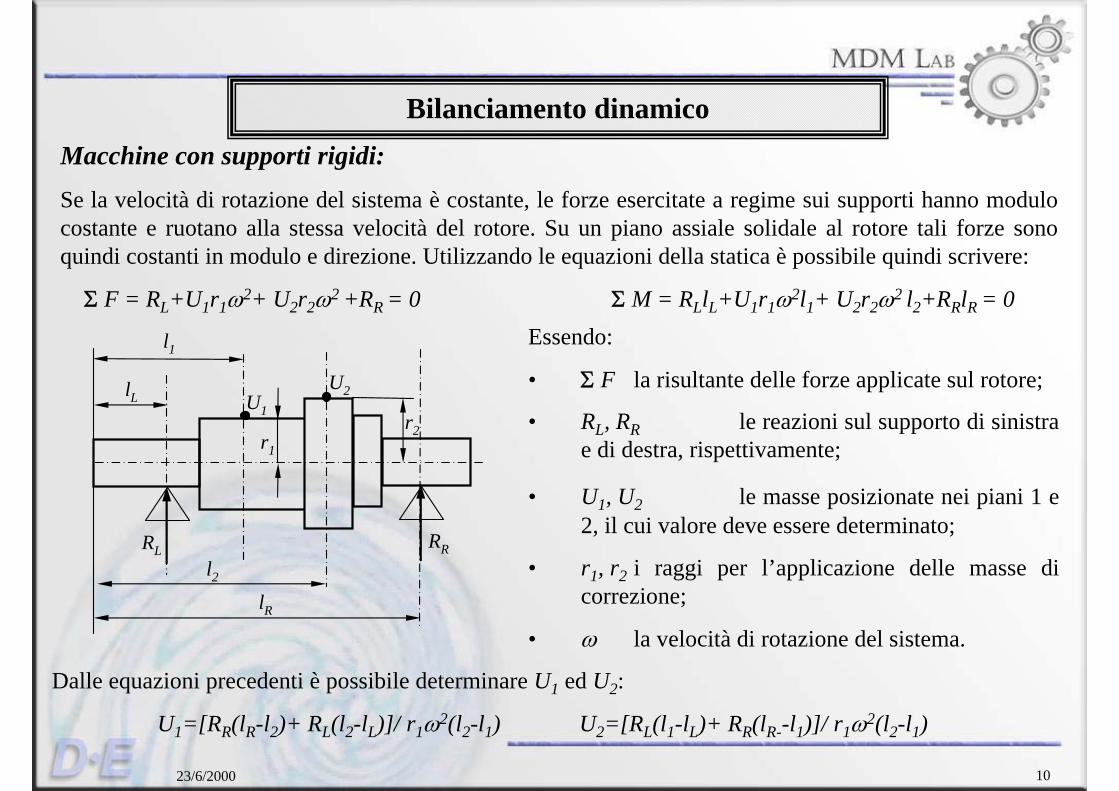
Bilanciamento dinamicoMacchine con supporti rigidi:Se la velocità di rotazione del sistema è costante, le forze esercitate a regime sui supporti hanno modulo costante e ruotano alla stessa velocità del rotore. Su un piano assiale solidale al rotore tali forze sono quindi costanti in modulo e direzione. Utilizzando le equazioni della statica è possibile quindi scrivere:
Σ F = RL+U1r1ω2+ U2r2ω2 +RR = 0 Σ M = RLlL+U1r1ω2l1+ U2r2ω2 l2+RRlR = 0Essendo:
• Σ F la risultante delle forze applicate sul rotore;
• RL, RR le reazioni sul supporto di sinistra e di destra, rispettivamente;
• U1, U2 le masse posizionate nei piani 1 e 2, il cui valore deve essere determinato;
• r1, r2 i raggi per l’applicazione delle masse di correzione;
• ω la velocità di rotazione del sistema.
U1
U2
l1
lR
lL
r1
r2
l2
RL RR
Dalle equazioni precedenti è possibile determinare U1 ed U2:
U1=[RR(lR-l2)+ RL(l2-lL)]/ r1ω2(l2-l1) U2=[RL(l1-lL)+ RR(lR--l1)]/ r1ω2(l2-l1)
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1123/6/2000
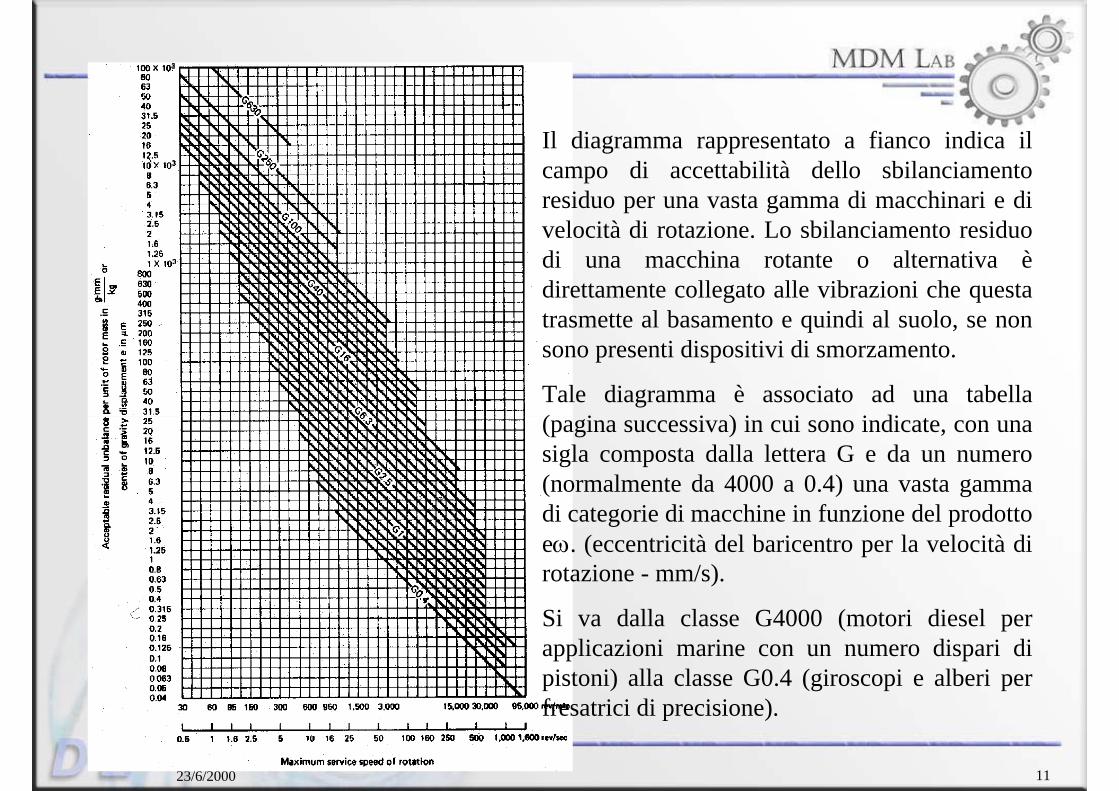
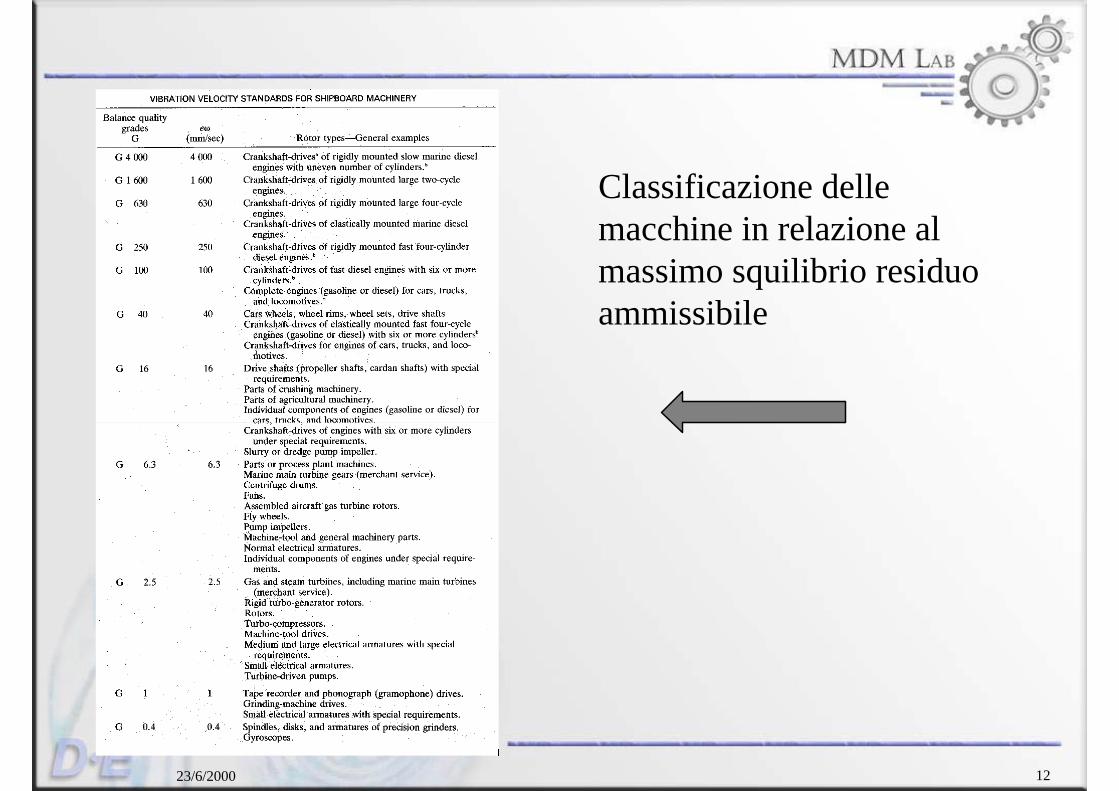
Il diagramma rappresentato a fianco indica il campo di accettabilità dello sbilanciamento residuo per una vasta gamma di macchinari e di velocità di rotazione. Lo sbilanciamento residuo di una macchina rotante o alternativa èdirettamente collegato alle vibrazioni che questa trasmette al basamento e quindi al suolo, se non sono presenti dispositivi di smorzamento.
Tale diagramma è associato ad una tabella (pagina successiva) in cui sono indicate, con una sigla composta dalla lettera G e da un numero (normalmente da 4000 a 0.4) una vasta gamma di categorie di macchine in funzione del prodotto eω. (eccentricità del baricentro per la velocità di rotazione - mm/s).
Si va dalla classe G4000 (motori diesel per applicazioni marine con un numero dispari di pistoni) alla classe G0.4 (giroscopi e alberi per fresatrici di precisione).
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1223/6/2000
Classificazione delle macchine in relazione al massimo squilibrio residuo ammissibile
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1323/6/2000
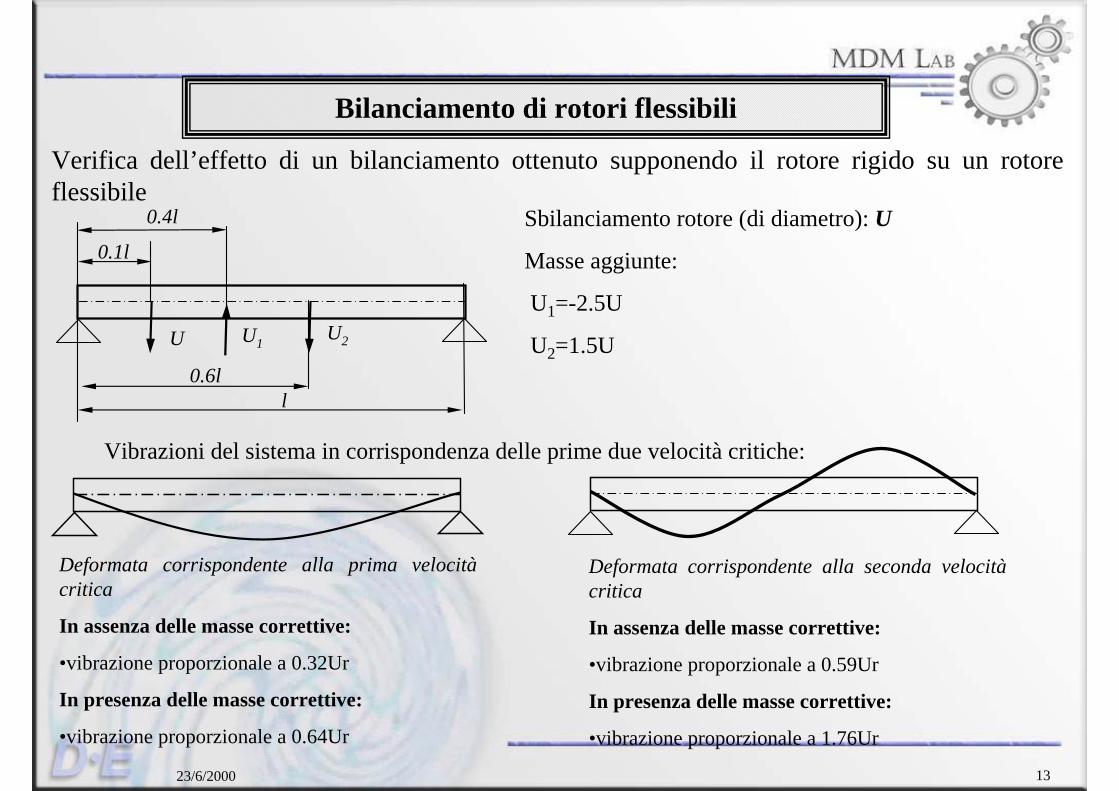
Bilanciamento di rotori flessibili
Verifica dell’effetto di un bilanciamento ottenuto supponendo il rotore rigido su un rotore flessibile
U
0.4l
l
0.1l
0.6l
U1 U2
Sbilanciamento rotore (di diametro): U
Masse aggiunte:
U1=-2.5U
U2=1.5U
Deformata corrispondente alla prima velocitàcritica
In assenza delle masse correttive:
•vibrazione proporzionale a 0.32Ur
In presenza delle masse correttive:
•vibrazione proporzionale a 0.64Ur
Vibrazioni del sistema in corrispondenza delle prime due velocità critiche:
Deformata corrispondente alla seconda velocitàcritica
In assenza delle masse correttive:
•vibrazione proporzionale a 0.59Ur
In presenza delle masse correttive:
•vibrazione proporzionale a 1.76Ur

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1423/6/2000
vibratorio del rotore nel suo campo dilavoro.
Nell’esempio precedente si osserva che una equilibratura basata sull’ipotesi di rotore rigido applicata a un rotore flessibile può amplificare il livello di vibrazioni. In generale quindi, le tecniche di equilibratura dei rotori rigidi non sono applicabili a rotori flessibili.
I rotori flessibili devono essere equilibrati in corrispondenza di tutte le velocità critiche inferiori alla massima velocità di progetto della macchina.
In alcuni casi è richiesta una equilibratura anche a velocità superiori a quella massima di progetto, soprattutto in presenza di una velocità critica poco smorzata vicina alla massima velocità operativa della macchina, anche se fuori del suo campo di lavoro.
Lo scopo di tutte le tecniche di equilibratura è in definitiva quello di ottenere un livello di vibrazioni accettabile a tutte le velocità, non solo a quelle corrispondenti alle effettive condizioni operative della macchina, e di poter accelerare e decelerare la macchina in condizioni di sicurezza durante i transitori (accensione e spegnimento).
Le moderne macchine equilibratrici dei rotori flessibili sono strumentate per misurare la vibrazione in alcune sezioni prescelte del rotore. Introducendo alcuna masse correttrici in piani prescelti del rotore (coincidenti o meno con quelli sui quali si misurano le vibrazioni), si cerca di conseguire alcuni risultati utili nel comportamento
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1523/6/2000
I moderni metodi di equilibratura dei rotori flessibili.
I metodi più diffusi nella pratica industriale sono essenzialmente due:
1. L’ equilibratura modale, con la quale si cerca di eliminare dalla vibrazione del rotore alcuni modi della sua deformazione dinamica flessionale, riducendo in definitiva il livello vibratorio complessivo del sistema;
2. L’ equilibratura basata sui coefficienti di influenza che ha l’obiettivo di ridurre al minimo il livello di vibrazione in alcune sezioni prescelte del rotore (ed esempio in corrispondenza dei cuscini a di altre sezioni significative del rotore stesso).
Allo stato dell’arte entrambe le tecniche presentano vantaggi e svantaggi. Nessuna delle due prevale sull’altra anche se c’è da dire che in campo industriale quella basata sull’utilizzo dei coefficienti di influenza è molto più diffusa.
I risultati migliori si possono ottenere con un attento utilizzo dei due metodi in modo da combinarne gli aspetti positivi.

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1623/6/2000
L’equilibratura dei rotori flessibili secondo modalità operative.
L’equilibratura, a seconda della velocità a cui viene trascinato il rotore, po’ suddividersi nelle due categorie:
•EQUILIBRATURA A BASSA VELOCITA’;
•EQUILIBRATURA A PIENA VELOCITA’.
Nel primo caso la velocità del rotore è inferiore a quella a cui esso si troverà ad operare: le macchine equilibratrici possono essere poste in postazione non protetta.
Macchina equilibratrice operante a bassa velocità (non abbisognano di protezioni particolari)

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1723/6/2000
Nel secondo caso (piena velocità), mancando la protezione della cassa della macchina, la postazione va protetta adeguatamente: di solito le macchine sono poste in bunker adeguatamente strutturato. Alcune macchine operano anche sotto vuoto per ridurre gli effetti del riscaldamento delle palette delle giranti nel loro contatto con l’aria e le eventuali distorsioni termiche asimmetriche.
Macchina equilibratrice per piena velocità in bunker sotto vuoto
N.B.L’equilibratura può essere condotta anche a velocità più elevata della massima a cui opererà il rotore17
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1823/6/2000
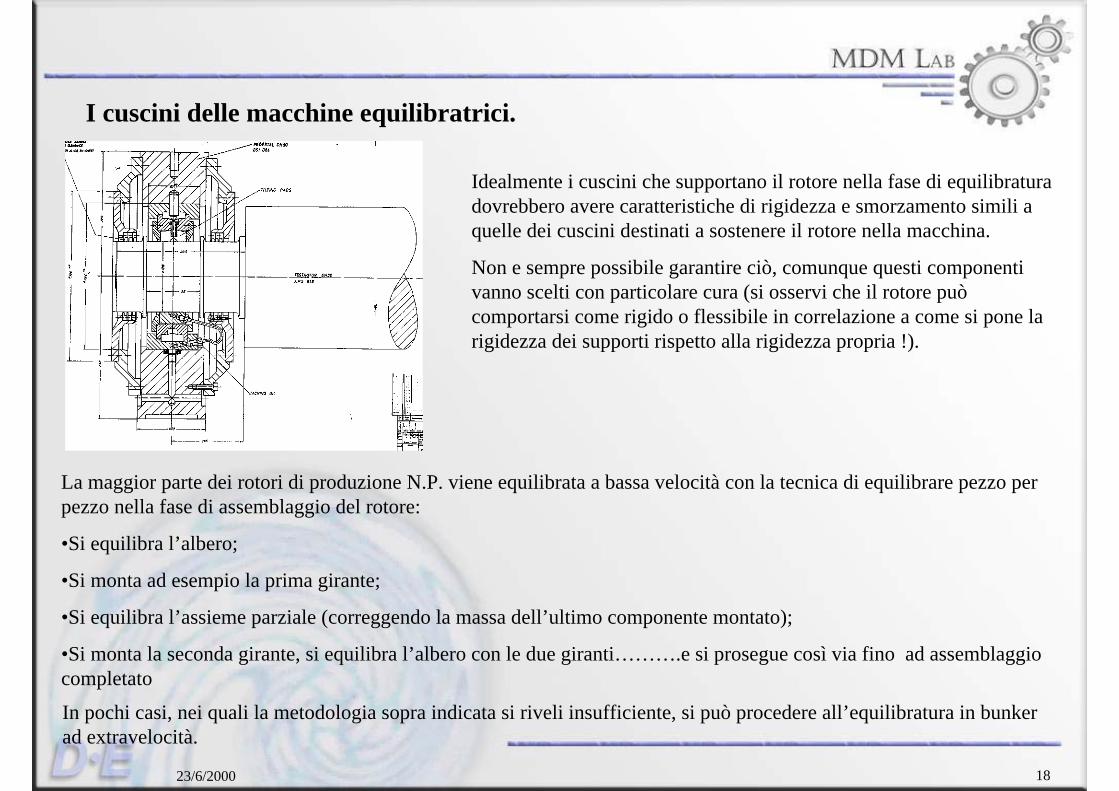
I cuscini delle macchine equilibratrici.
Idealmente i cuscini che supportano il rotore nella fase di equilibratura dovrebbero avere caratteristiche di rigidezza e smorzamento simili a quelle dei cuscini destinati a sostenere il rotore nella macchina.
Non e sempre possibile garantire ciò, comunque questi componentivanno scelti con particolare cura (si osservi che il rotore può comportarsi come rigido o flessibile in correlazione a come si pone la rigidezza dei supporti rispetto alla rigidezza propria !).
La maggior parte dei rotori di produzione N.P. viene equilibrata a bassa velocità con la tecnica di equilibrare pezzo per pezzo nella fase di assemblaggio del rotore:
•Si equilibra l’albero;
•Si monta ad esempio la prima girante;
•Si equilibra l’assieme parziale (correggendo la massa dell’ultimo componente montato);
•Si monta la seconda girante, si equilibra l’albero con le due giranti……….e si prosegue così via fino ad assemblaggio completato
In pochi casi, nei quali la metodologia sopra indicata si riveli insufficiente, si può procedere all’equilibratura in bunker ad extravelocità.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 1923/6/2000
Sia dato un sistema vibrante discreto con N gradi di libertà, non smorzato (come il modello di rotore introdotto) eccitato da una forzante esterna (la forza centrifuga dovuta allo squilibrio nel caso del rotore:
[ ] [ ] { })(..
tFXKXM =+Si studi il problema non forzato (assenza di eccitazione - {F(t)}={0}). La soluzione dell’equazione omogenea associata viene cercata tra i vettori {X}= {XO}ejωt , in cui sono incogniti l’ampiezza di oscillazione {XO} e la pulsazione ω. Derivando e sostituendo tale possibile soluzione nel sistema di equazioni differenziali che regolano le oscillazioni libere del rotore, questo si trasforma in un sistema algebrico ordinario e ci si riduce al seguente problema agli autovalori e autovettori: [ ] [ ]( ){ } 02 =°+− XKMω
Richiami di analisi modale dei sistemi discreti
È noto che esistono soluzioni diverse da quella così detta “banale” se e solo se le pulsazioni delle vibrazioni sono pari alle radici ω1< ω2< ω3< ….. < ωN del polinomio caratteristico:
(-ω2[M]+[K]).Tali radici (anzi, per meglio dire, i loro quadrati) sono note come ‘autovalori’ in ambito matematico mentre nella meccanica vengono indicate come ‘pulsazioni naturali’ del sistema. Siano [Ψ] = [Ψ1| Ψ2| Ψ3| ……. |ΨN] i corrispondenti vettori {XO} soluzione del sistema lineare omogeneo di partenza: in ambito matematico sono noti come ‘autovettori’. Mentre nella meccanica vengono indicati come ‘modi di vibrare del sistema’ o semplicemente ‘modi’. La matrice Ψ è nota come ‘matrice modale’. E’ facile dimostrare che tale matrice è definita a meno di una costante moltiplicativa per ognuna delle sue colonne (se {XO} è una soluzione, lo è anche {a·XO}, con a numero reale qualsiasi). Si può dimostrare che quando il sistema inizia a muoversi a partire da condizioni iniziali qualsiasi (posizione e velocità), questo vibrerà con una legge oraria che è una combinazione lineare di tutti i modi (sono presentile al più tutte e solo le pulsazioni naturali) e i pesi dipendono solo dalle condizioni iniziali. Dal punto di vista fisico la j-esima componente del modo k rappresenta l’ampiezza della componente di pulsazione ωk nella vibrazione del nodo j-esimo della struttura.

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2023/6/2000
Ortogonalità delle matrici modali rispetto a quelle di massa e di rigidezzaLe basi dell’analisi modale si basano sulla seguente proprietà, facilmente dimostrabili:
[Ψ]’ [M] [Ψ] =diag(mr) ; [Ψ]’ matrice trasposta di [Ψ]
[Ψ]’ [K] [Ψ] =diag(kr) . Si consideri il problema di partenza:
Si premoltiplichi membro a membro detto sistema per la trasposta della matrice modale; sfruttando inoltre l’invarianza del prodotto rispetto alla matrice unità otteniamo:
Introducendo le “coordinate modali” (note anche come coordinate principali) {Xm}= [Ψ]-1{X} ,il sistema di partenza si disaccoppia e le soluzioni si ottengono risolvendo N equazioni differenziali formalmente indipendenti, del tipo:
Proprietà di ortogonalità della matrice modale rispetto alle matrici di massa e rigidezza.
[ ] [ ] { })(..
tFXKXM =+
[ ] [ ][ ][ ] [ ] [ ][ ][ ] { } [ ] { })(''' 1..
1 tFXKXM Ψ=ΨΨΨ+⎭⎬⎫
⎩⎨⎧ΨΨΨ −−
)(..
tfxkxmrrr mmrmr =+ La coordinata modale r-esima rappresenta in definitiva come pesa nella
risposta il modo r-esimo, sotto l’eccitazione della forza modale r-esima, che rappresenta l’effetto su quel dato modo di tutte le forze agenti sul sistema.
Ovviamente, con la trasformazione inversa {X} = [Ψ] {Xm} , è possibile passare dallo spazio delle coordinate modali a quello delle coordinate fisiche.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2123/6/2000
Risposta in frequenza del sistema in termini modali.Grazie alle proprietà della matrice modale si dimostra facilmente che la risposta in frequenza del sistema, espressa in termini di ricettanza (spostamento/forza), è data dalla somma pesata delle singole risposte in frequenza dei sottosistemi disaccoppiati:
Con si è indicata la l-esima componente del modo r-esimo
In presenza di smorzamento viscoso la risposta di cui sopra diventa una funzione complessa della variabile reale ω cosìesprimibile:
N.B. in tal caso anche i modi risultano complessi
Introducendo le pulsazioni naturale e il fattore di smorzamento l’espressione soprastante diventa:
{ }{ }( )∑
= +−ΨΨ
=N
r rr
jr
ir
ij km1 2
)(
ωωα
lrΨ
{ }{ }( )∑
= ++−ΨΨ
=N
r rrr
qr
pr
pq cikm1 2
)(ωω
ωα
∑= +⎟⎟
⎠
⎞⎜⎜⎝
⎛−
=N
rr
r
pq
r
r
i12
2
2
2
2 1
1
)(
ωωζ
ωω
ωωα
Essendo il fattore di smorzamento del modor-esimo.
rrr mk2=ζ
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2223/6/2000
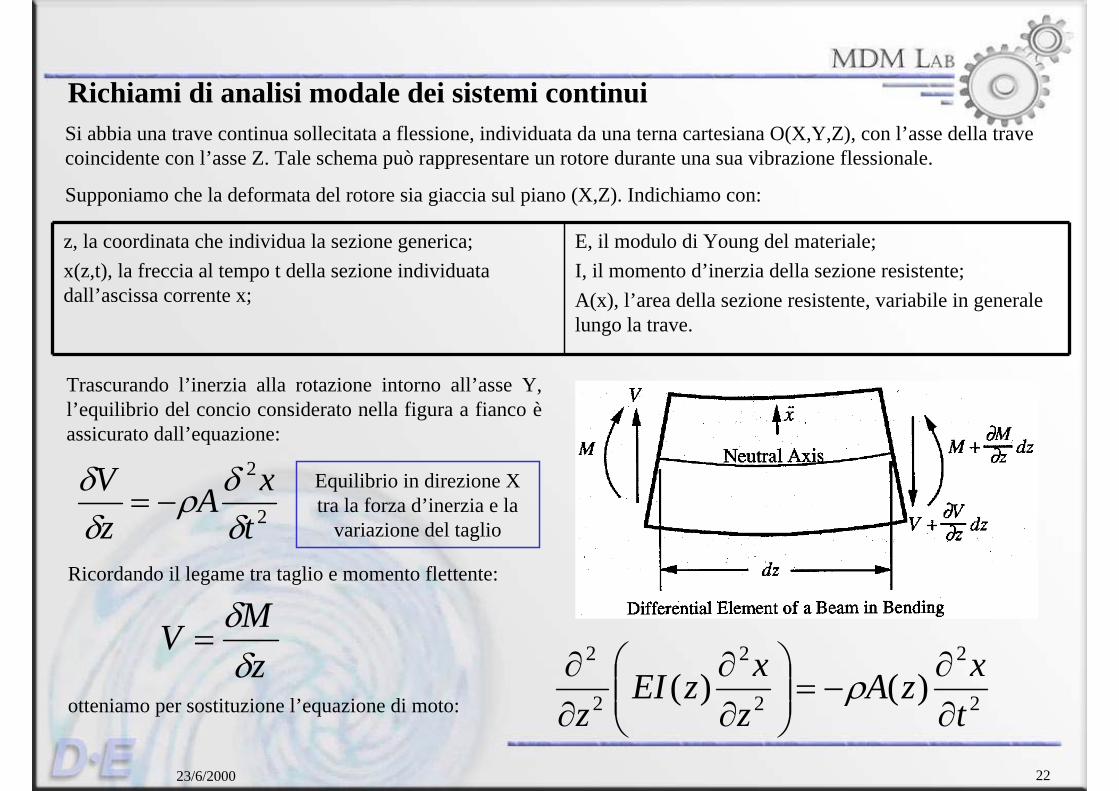
Richiami di analisi modale dei sistemi continuiSi abbia una trave continua sollecitata a flessione, individuata da una terna cartesiana O(X,Y,Z), con l’asse della trave coincidente con l’asse Z. Tale schema può rappresentare un rotore durante una sua vibrazione flessionale.
Supponiamo che la deformata del rotore sia giaccia sul piano (X,Z). Indichiamo con:
z, la coordinata che individua la sezione generica;x(z,t), la freccia al tempo t della sezione individuata dall’ascissa corrente x;
E, il modulo di Young del materiale;I, il momento d’inerzia della sezione resistente;A(x), l’area della sezione resistente, variabile in generale lungo la trave.
Trascurando l’inerzia alla rotazione intorno all’asse Y, l’equilibrio del concio considerato nella figura a fianco èassicurato dall’equazione:
2
2
txA
zV
δδρ
δδ
−=Equilibrio in direzione X tra la forza d’inerzia e la
variazione del taglio
Ricordando il legame tra taglio e momento flettente:
otteniamo per sostituzione l’equazione di moto:
zMVδ
δ=
2
2
2
2
2
2
)()(txzA
zxzEI
z ∂∂
−=⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
∂∂ ρ
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2323/6/2000
Se la trave ha sezione costante l’equazione di moto si semplifica nella seguente:
dove rappresenta il rapporto tra massa per unità di lunghezza e rigidezza flessionale.
In tale caso l’equazione di moto si risolve con il metodo di separazione delle variabili, cercando soluzioni della forma:
x(z, t) = Z( z ) T( t ) . Sostituendo nell’equazione di moto, si ottiene l’equazione:
Si osservi che, nell’ipotesi di potere separare le variabili,l’equazione differenziale alle derivate parziali si trasforma in un legame tra le derivate ordinarie delle due funzioni ilcui prodotto costituisce la soluzione dell’equazione originaria.
L’equazione soprastante può essere sostituita dal sistema:
2
22
4
4
txa
zx
∂∂
−=∂∂
EIAa ρ
=2
2
22
4
4 )()()(
1dt
tTdtT
adz
ZdzZ
−=
⎪⎪⎩
⎪⎪⎨
⎧
=−
=
42
22
44
4
)()(
)(1
λ
λ
dttTd
tTa
dzZd
zZ
in ragione del fatto che nell’equazione di partenza a primo membro compaiono solo funzioni della z e nel secondo solo funzioni di t. Si osservi anche che le due equazioni non sono effettivamente disaccoppiate in quanto legate dalla presenza del termine λ4 che dovrà essere determinato dalle condizioni di vincolo della trave (condizioni al contorno). (λ ha le dimensioni di m-1). Le due equazioni a fianco possono essere più comodamente scritte nella forma seguente:
0)()( 44
4
=− zZdz
zZd λ , 0)()(2
4
2
2
=+ tTkdt
tTd λ
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2423/6/2000
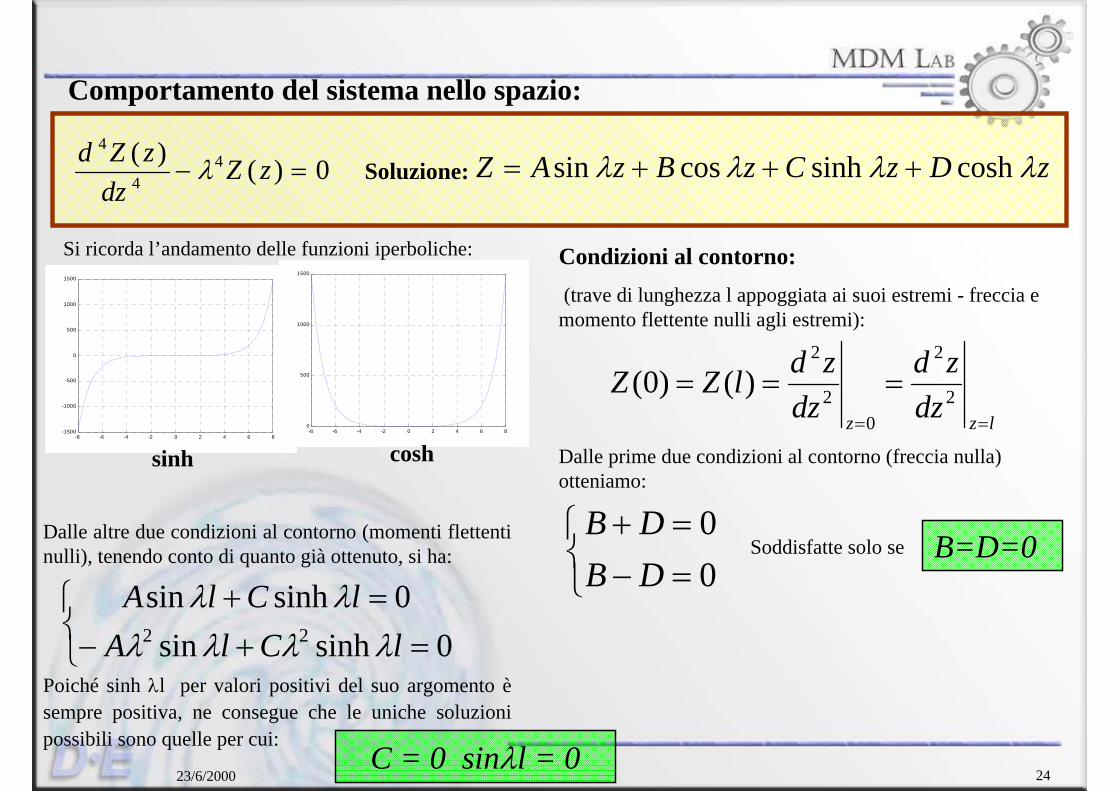
Comportamento del sistema nello spazio:
0)()( 44
4
=− zZdz
zZd λ Soluzione: zDzCzBzAZ λλλλ coshsinhcossin +++=
Condizioni al contorno:(trave di lunghezza l appoggiata ai suoi estremi - freccia e momento flettente nulli agli estremi):
Dalle prime due condizioni al contorno (freccia nulla) otteniamo:
-8 -6 -4 -2 0 2 4 6 8-1500
-1000
-500
0
500
1000
1500
-8 -6 -4 -2 0 2 4 6 80
500
1000
1500
Si ricorda l’andamento delle funzioni iperboliche:
sinh coshlzz dz
zddz
zdlZZ==
=== 2
2
02
2
)()0(
⎩⎨⎧
=−=+
00
DBDB
B=D=0
⎩⎨⎧
=+−=+
0sinhsin0sinhsin
22 lClAlClA
λλλλλλ
Dalle altre due condizioni al contorno (momenti flettenti nulli), tenendo conto di quanto già ottenuto, si ha:
Poiché sinh λl per valori positivi del suo argomento èsempre positiva, ne consegue che le uniche soluzioni possibili sono quelle per cui:
C = 0 sinλl = 0
Soddisfatte solo se
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2523/6/2000
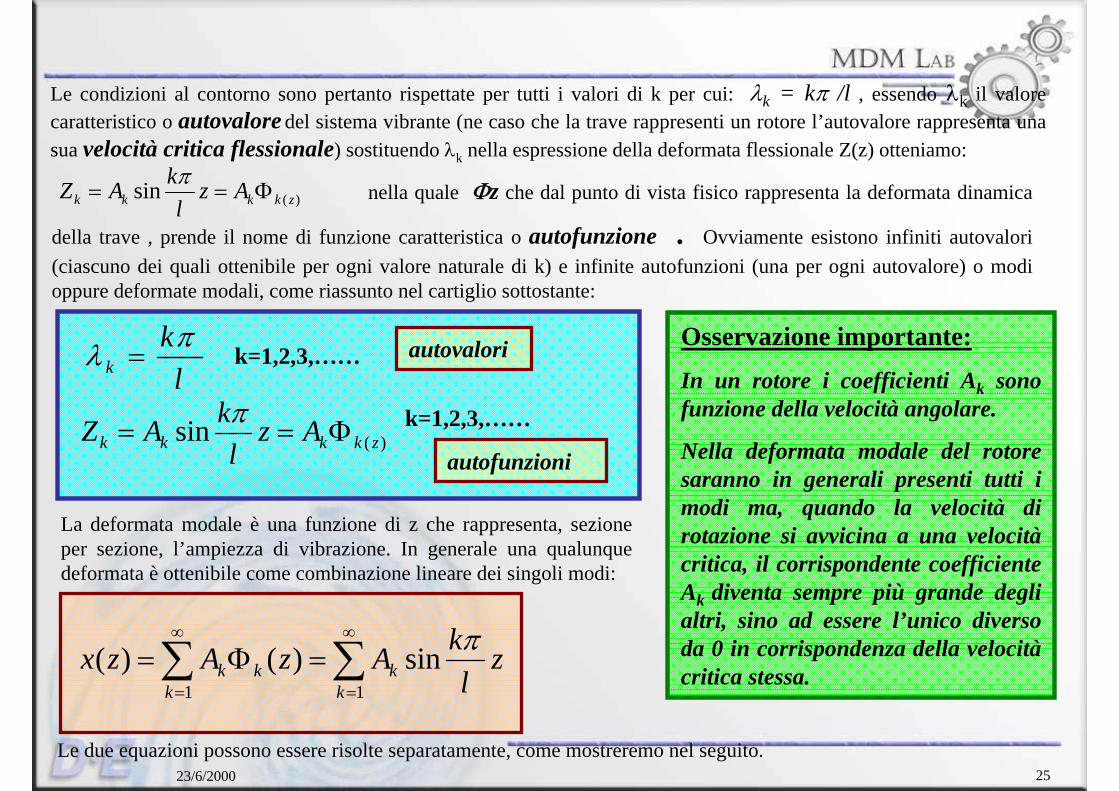
Le condizioni al contorno sono pertanto rispettate per tutti i valori di k per cui: λk = kπ /l , essendo λk il valore caratteristico o autovalore del sistema vibrante (ne caso che la trave rappresenti un rotore l’autovalore rappresenta una sua velocità critica flessionale) sostituendo λk nella espressione della deformata flessionale Z(z) otteniamo:
)(sin zkkkk Azl
kAZ Φ==π
nella quale Φz che dal punto di vista fisico rappresenta la deformata dinamica
della trave , prende il nome di funzione caratteristica o autofunzione . Ovviamente esistono infiniti autovalori (ciascuno dei quali ottenibile per ogni valore naturale di k) e infinite autofunzioni (una per ogni autovalore) o modi oppure deformate modali, come riassunto nel cartiglio sottostante:
La deformata modale è una funzione di z che rappresenta, sezione per sezione, l’ampiezza di vibrazione. In generale una qualunque deformata è ottenibile come combinazione lineare dei singoli modi:
lk
kπλ =
)(sin zkkkk Azl
kAZ Φ==π
autovalori
autofunzioni
k=1,2,3,……
k=1,2,3,……
∑ ∑∞
=
∞
=
=Φ=1 1
sin)()(k k
kkk zl
kAzAzx π
Osservazione importante:In un rotore i coefficienti Ak sono funzione della velocità angolare.
Nella deformata modale del rotore saranno in generali presenti tutti i modi ma, quando la velocità di rotazione si avvicina a una velocitàcritica, il corrispondente coefficiente Ak diventa sempre più grande degli altri, sino ad essere l’unico diverso da 0 in corrispondenza della velocitàcritica stessa.
Le due equazioni possono essere risolte separatamente, come mostreremo nel seguito.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2623/6/2000
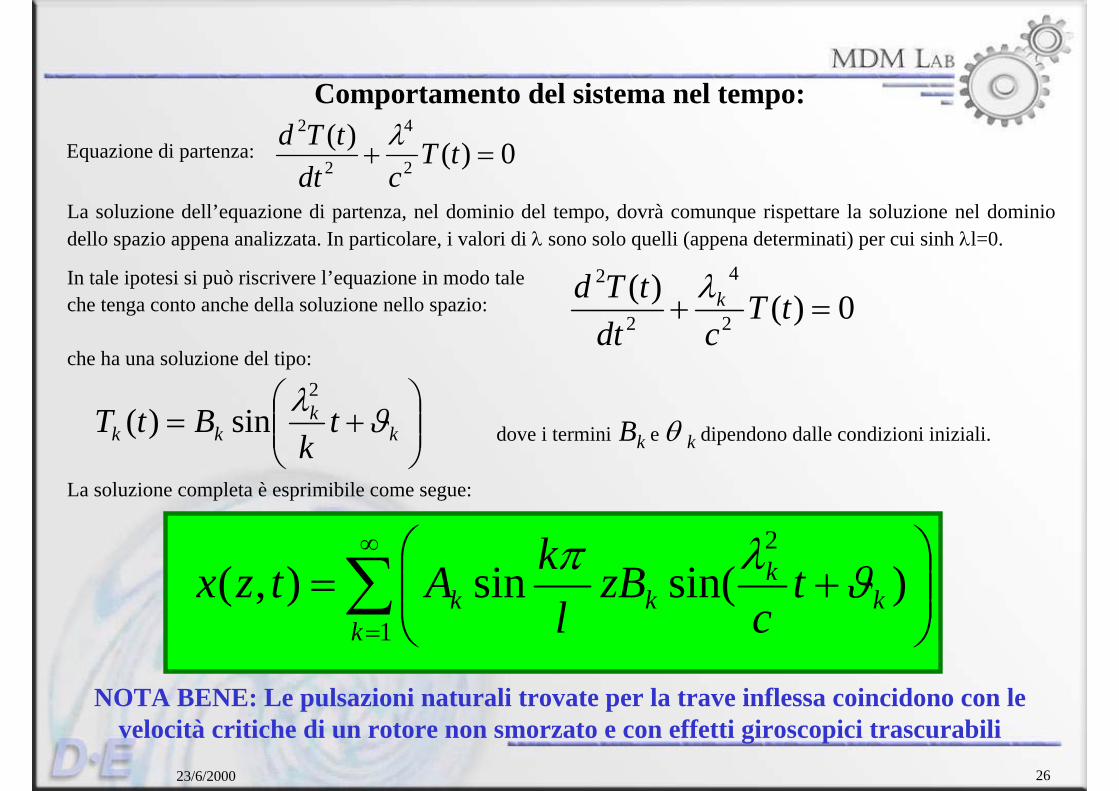
Comportamento del sistema nel tempo:
0)()(2
4
2
2
=+ tTcdt
tTd λEquazione di partenza:
La soluzione dell’equazione di partenza, nel dominio del tempo, dovrà comunque rispettare la soluzione nel dominio dello spazio appena analizzata. In particolare, i valori di λ sono solo quelli (appena determinati) per cui sinh λl=0.
In tale ipotesi si può riscrivere l’equazione in modo taleche tenga conto anche della soluzione nello spazio:
che ha una soluzione del tipo:
dove i termini Bk e θ k dipendono dalle condizioni iniziali.
La soluzione completa è esprimibile come segue:
0)()(2
4
2
2
=+ tTcdt
tTd kλ
⎟⎟⎠
⎞⎜⎜⎝
⎛+= k
kkk t
kBtT ϑλ2
sin)(
NOTA BENE: Le pulsazioni naturali trovate per la trave inflessa coincidono con le velocità critiche di un rotore non smorzato e con effetti giroscopici trascurabili
∑∞
=⎟⎟⎠
⎞⎜⎜⎝
⎛+=
1
2
)sin(sin),(k
kk
kk tc
zBl
kAtzx ϑλπ

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2723/6/2000
Nel disegno a fianco, si rappresentano le prime quattro deformate modali del rotore.
Alla base del metodo di equilibratura modale sta una importante proprietà degli autovettori e delle corrispondenti autofunzioni, nota come proprietà di ortogonalità della autofunzioni.
⎩⎨⎧
=∀Ρ=∀
=ΦΦ∫ )()(0
)()()(0 ji
jidzzzzA ji
l
ρ
Ortogonalità delle autofunzioni nel caso generale:
Il metodo del bilanciamento modale ha la sua base teorica sull’ipotesi che ogni deformata h(z) del rotore, in condizioni operative, possa esprimersi come combinazione lineare delle deformate modali:
∑∞
=
Φ=1
)()(k
kk zpzhEssendo i pesi pi determinabili risolvendo gli integrali
∫ ΦΡ
=l
kk dzzzxzAp0
)()()(1 ρ
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2823/6/2000
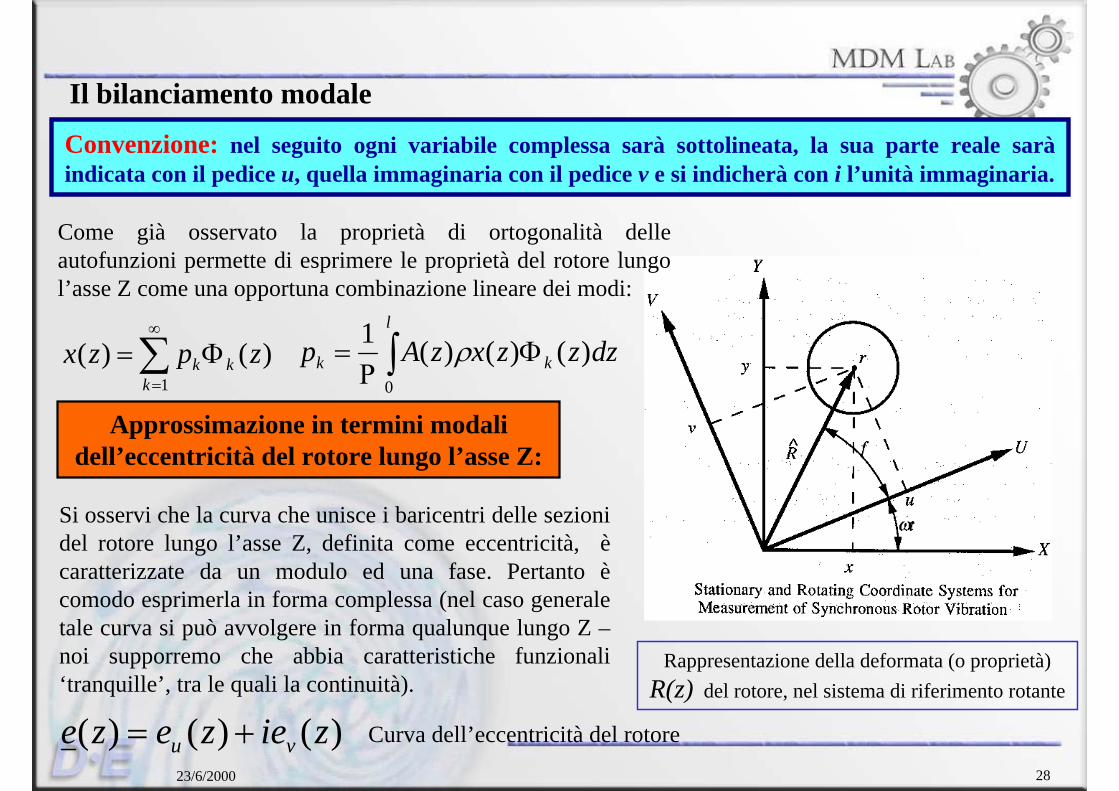
Il bilanciamento modale
∑∞
=
Φ=1
)()(k
kk zpzx ∫ ΦΡ
=l
kk dzzzxzAp0
)()()(1 ρ
Si osservi che la curva che unisce i baricentri delle sezioni del rotore lungo l’asse Z, definita come eccentricità, ècaratterizzate da un modulo ed una fase. Pertanto ècomodo esprimerla in forma complessa (nel caso generale tale curva si può avvolgere in forma qualunque lungo Z –noi supporremo che abbia caratteristiche funzionali ‘tranquille’, tra le quali la continuità).
)()()( ziezeze vu +=
Convenzione: nel seguito ogni variabile complessa sarà sottolineata, la sua parte reale saràindicata con il pedice u, quella immaginaria con il pedice v e si indicherà con i l’unità immaginaria.
Curva dell’eccentricità del rotore
Rappresentazione della deformata (o proprietà) R(z) del rotore, nel sistema di riferimento rotante
Approssimazione in termini modali dell’eccentricità del rotore lungo l’asse Z:
Come già osservato la proprietà di ortogonalità delle autofunzioni permette di esprimere le proprietà del rotore lungo l’asse Z come una opportuna combinazione lineare dei modi:
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 2923/6/2000
Espansione dell’eccentricità nella serie delle funzioni modali:
∑∑∞
=
∞
=
Φ+=Φ=11
)()()()(k
kvuk
kk zieezezekk ∫ Φ
Ρ=
l
kk dzzzezAe0
)()()(1 ρcon pesi:
Approssimazione in termini modali del moto orbitale del rotore
Indicato con il vettore che individua la deformazione elastica del rotore nella sezione z potremo analogamente esprimerla in espansione di termini modali:
)(zr
)()()()()()(11
zirrzrzirzrzr zvukk
kkvu Φ+=Φ=+= ∑∑∞
=
∞
=
Conseguenza della condizione di ortogonalità delle autofunzioni:
La deformazione elastica del rotore è in generale una combinazione lineare delle forze squilibranti dovute all’eccentricità (nel caso continuo che stiamo trattando la combinazione lineare è piùpropriamente rappresentata da integrazioni). Tenendo conto della proprietà di ortogonalità delle funzioni modali la trasformazione di cui sopra si semplifica tanto da poter affermare che:
La k-esima componente della deformazione elastica è provocata esclusivamente dalla k-esima componente dello squilibrio
)(zr kk Φ)(ze kk Φ
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3023/6/2000
Criterio di base della equilibratura modale:compensando la k-esima componente dell’eccentricità, faremo sparire nella deformazione dinamica del rotore la componente corrispondente.
In definitiva, grazie all’analisi modale, la risposta allo squilibrio del sistema vibrante continuo ‘rotore’, dotato di infiniti gradi di libertà, può essere approssimata sommando l’andamento nel tempo di un numero finito N delle sue coordinate modali (l’espressione soprastante rappresenta la k-esima di quelle prese in considerazione).
Ricordando l’espressione delle risposta in frequenza del sistema dopo il disaccoppiamento modale (vedi i richiami di analisi modale inseriti in questo modulo didattico) e considerando che la forzante è la forza centrifuga conseguente allo squilibrio, avremo:
ωωζωωω
kkk
kk i
er222
2
+−= Risposta del k-esimo modo del rotore alla forzante dovuta allo squilibrio
Se la k-esima pulsazione naturale e il k-esimo fattore di smorzamento modale fossero noti (o dalla sperimentazione o dal calcolo), poiché nell’operazione di equilibratura l’ampiezza di vibrazione èmisurata, l’espressione soprastante potrebbe essere utilizzata direttamente per dedurre la k-esima componente modale della squilibrio, che potrebbe essere così compensata eliminando dalla risposta del rotore il contributo del k-esimo modo di vibrare.
Purtroppo generalmente né il fattore di smorzamento modale né la pulsazione naturale possono essere conosciuti con la precisione necessaria ad ottenere squilibri residui soddisfacenti.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3123/6/2000
ωωζωωω
kkk
kk i
er222
2
+−=
Conclusione:Dal legame tra freccia e squilibrio si osserva immediatamente che la vibrazione del rotore
rk è proporzionale allo squilibrio ek tramite il coefficiente funzione della sola velocità angolare del rotore.
In [18] – vedi bibliografia -, è stato dimostrato che , aggiungendo N masse squilibranti ml sui piani di ascissa zl , la vibrazione del modo k-esimo in corrispondenza al piano zl rk(zl) diventa rk
o(zl). La variazione della vibrazione Δrk(zl) vale: Δrk(zl) = rk(zl) - rk
o(zl)
ωωζωωω
kkk i222
2
+−
Lo scopo dell’equilibratura modale è quello di scegliere lm ld lz in modo tale che )( lk zrΔ
compensi esattamente la k-esima componente modale dello squilibrio. Ovviamente non sarà possibile conseguire tutto ciò in modo esatto: l’obbiettivo potrà considerarsi conseguito se lo squilibrio residuo risulterà inferiore ad un livello prestabilito. E’ anche necessario aver cura che, equilibrando il modo k-esimo, non si alterino i modi già equilibrati (di norma quelli a giri minori).
Vibrazione sul piano zl dovuta al k-esimo modo
∑= Ρ
Φ=Δ
N
l
lklllk
zdmzr1
)()( rappresenta la massa aggiunta
rappresenta la sua collocazione (modulo e fase nel sistema di riferimento rotante) ldlm
Ρrappresenta la costante di riduzione modale )()()()(0
jidzzzzA ji
l
=∀Ρ=ΦΦ∫ ρ
Vibrazione sul piano zl dovuta al k-esimo modo

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3223/6/2000
Metodologia del bilanciamento modale(tecnica degli N e degli N+2 piani di equilibratura)Nella letteratura tecnica sono proposte diverse metodologie di equilibratura basate sui risultati dell’analisi modale. Dette metodologie possono essere di massima suddivise in due principali categorie:1.Metodo basato su N piani di equilibratura;2.Metodo basato su (N+2) piani di equilibratura.
Entrambi i metodi hanno a comune la necessità di determinare in via preliminare il numero di velocità critiche e le relative deformate modali che cadono al di sotto della massima velocitàoperativa del rotore più uno o, meglio, due modi che cadono a velocità superiori alla massima.
∑= Ρ
Φ=Δ
N
l
lklllk
zdmzr1
)()(
Sia n il numero di modi che vogliamo eliminare dalla risposta allo squilibrio del rotore (senza far riferimento in questa fase preliminare a come n sia correlato con il numero N dei piani di equilibratura). Ricordando che , per effetto di una massa aggiunta, la risposta del sistema varia della quantità:
dovremo rispettare due esigenze:
Per non squilibrare il rotore rispetto agli (N-1) modi di ordine inferiore, già equilibrati
Per equilibrare il modo N-esimo.
N.B. P e rN possono essere misurati.
0)(1
=Φ∑=
lkll
n
l
zdm k=1,2,….,N-1
NlNll
n
l
rzdm Ρ−=Φ∑=
)(1
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3323/6/2000
0)(1
=Φ∑=
lkll
n
l
zdm
NlNll
n
l
rzdm Ρ−=Φ∑=
)(1
k=1,2,….,N-1
Analisi algebrica dell’equilibratura modale (N piani)
Rappresenta un sistema di (n-1) equazioni vettoriali (2(N+1) scalari)
Rappresenta una equazione vettoriale
Una possibile metodologia operativa:
Si sta equilibrando la componente della deformata del rotore corrispondente al N-esimo modo.
I prodotti mldl (l=1,2,….,n) rappresentano n vettori (due incognite scalari). Dalla prima relazione lineare consegue che se le masse aggiuntive sono poste complanari su un piano trasversale prestabilito avremo (N-1)equazioni in n (n ≥ N) incognite. La seconda relazione rappresenta una equazione vettoriale lineare in una variabile complessa.
IN DEFINTITIVA IL PROBLEMA E’ DETERMINATO SE n ≥ N(numero dei piani di equilibratura maggiore o uguale al numero di deformate modali che si tenta di
eliminare dalla risposta in frequenza del rotore)
Ovviamente se n è uguale a N le masse di correzione sono univocamente determinate (n equazioni in n incognite).
Se invece n è maggiore di N (più equazioni che incognite) si può procedere con il metodo dei minimi quadrati.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3423/6/2000
Analisi algebrica dell’equilibratura modale [(N+2) piani]Il metodo è uguale al precedente, salvo che preliminarmente si procede ad una equilibratura di rotore rigido. Perché il rotore, supposto rigido risulti equilibrato dovrà soddisfare le equazioni:
⎪⎪⎩
⎪⎪⎨
⎧
=
=
∑
∑
=
=n
llll
n
lll
zrm
rm
1
1
0
0 Baricentro sull’asse di rotazione e momenti statici nulli rispetto al baricentro stesso (eccentricità nulla: non possono innescarsi ne forze che inducono moti cilindrici, némomenti che provocano moti conici)
Queste due equazioni vanno aggiunte a quelle precedenti per cui i piani di equilibratura diventano (N+2).
Considerazioni sui due metodiNella letterature tecnica i due metodi sono stati messi a confronto. In [3,4] si osserva come ovviamente non abbia senso
procedere alla equilibratura dei modi flessibili del rotore se prima esso non sia già bilanciato nei suoi comportamenti di corpo rigido. Il quesito si pone su un piano diverso:
È giustificato equilibrare in via preliminare (indipendentemente dal metodo seguito) un rotore flessibile con le tecniche di equilibratura dei rotori rigidi?
L’opportunità o meno dipende da due considerazioni:
1. Se rotore può essere piazzato su una macchina equilibratrice predisposta alle tecniche di equilibratura di corpo rigido e quindi essere assemblato sui suoi supporti con la ragionevole sicurezza che su di essi l’equilibratura di corpo rigido sia mantenuta;
2. Non c’è accordo tra gli esperti se il non aver soddisfatto le condizioni di equilibrio di corpo rigido comporti o meno considerevoli aumenti dello squilibrio residuo, una volta effettuata correttamente al procedura di equilibratura di corpo flessibile.
Al problema posto non è ancora stata data una risposta definitiva: in letteratura sono presenti esempi di casi vissuti che confortano sia l’una che l’altra delle due procedure.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3523/6/2000
Considerazioni conclusive sulle tecniche di equilibratura modaleLa teoria dell’equilibratura modale si basa su due fondamentali presupposti:
1. Lo smorzamento del sistema è trascurabile;
2. Le deformate modali giacciono su un piano.
Queste due ipotesi non sono nella pratica sempre verificate.
Uno degli scopi fondamentali dell’equilibratura di un rotore è quello di ridurre la sue vibrazioni in corrispondenza dei supporti. Poiché l’equilibratura modale ha origine da presupposti diversi, può accadere che la vibrazione residua sia in realtà troppo alta, soprattutto se i cuscini sono collocati in vicinanza di un nodo di una deformata modale.
In definitiva anche se i calcoli e le operazioni da eseguire sono relativamente semplici, il conseguimento di un buon risultato presuppone la presenza di un operatore piuttosto esperto.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3623/6/2000
Vantaggi e limiti dell’equilibratura modale
Vantaggi Svantaggi
Il numero di prove, rispetto agli altri metodi, è limitato;Ottima sensibilità alle alte velocità di equilibratura;Equilibrando un dato modo non si introducono squilibri nei modi giàequilibrati (di solito si tratta di modi tipici di velocità più basse di quella attuale);Afferrati beni i concetti che ne stanno alla base, può essere condotta per via totalmente empirica anche se calcoli teorici di rotordinamica sono sempre utili.
L’ipotesi di deformate elastiche piane è penalizzante per la precisione dei risultati nel caso di deformate dinamiche del rotore che non giacciono su un piano, come avviene nei cuscini portanti idrodinamici;In casi particolari è importante conoscere a priori il comportamento modale del rotore, ad esempio dal calcolo;L’operatore deve essere abbastanza esperto e possedere le nozioni base dell’analisi modale;Si ricorre di solito a misure di vibrazione con una o due sensori per cui non è sempre facile riconoscere con la necessaria precisione la presenza di un dato modo di vibrare;Non è facilmente automatizzabile;Equilibrando modi bassi si può peggiorare la risposta di modi superiori (questo può essere evitato aggiungendo ulteriori piani di equilibratura).
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3723/6/2000
Equilibratura di un rotore flessibile con il metodo dei coefficienti di influenza.
1. Se in una sezione lo squilibrio raddoppia, in qualunque sezione del rotore le ampiezze di vibrazione imputabili a quel dato squilibrio debbono raddoppiare;
2. Se si applicano contemporaneamente due masse squilibranti la risposta del rotore, in ogni sua sezione, corrisponde alla somma delle due risposte misurabili in presenza di uno solo dei due squilibri considerati.
Se il comportamento del sistema non rispetta le due condizioni di cui sopra, l’equilibratura condotta con i coefficienti di influenza non è possibile (risulterebbe affetta da errori inaccettabili).
Per superare la difficoltà sopra indicata, si può provare a ridurre le masse squilibranti di tentativo fintantoché non si verifichi il rispetto dei due requisiti sopra indicati.
Ovviamente le due condizioni dovrebbero essere rispettate in presenza di uno squilibrio che genera ampiezze di vibrazione più elevate della sensibilità dei sensori destinati a misurarle.
Il metodo, proposto da Goodmann [60] negli anni 60, è stato perfezionato nel tempo con i contributi di Lund e Tonneson [87] e, con verifiche sperimentali, da Tessarzik ed altri [128,129].
L’ipotesi alla base di questo metodo è che il rotore, durante il suo funzionamento, sia caratterizzato da un comportamento lineare. Il metodo si basa sull’applicazione di masse squilibranti di tentativo su un prescelto numero di sezioni del rotore. La verifica che il sistema sta operando in regime lineare può essere condotta controllando che il rotore rispetti il verificarsi di due comportamenti:
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3823/6/2000
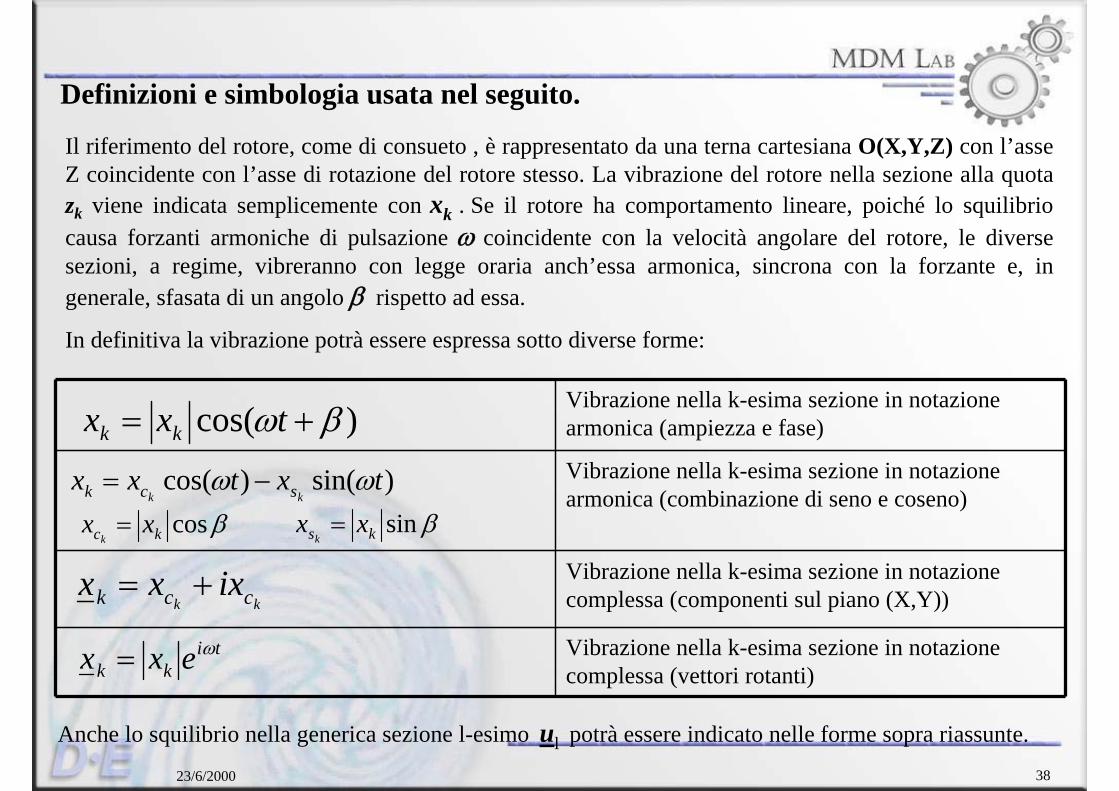
Definizioni e simbologia usata nel seguito.
Il riferimento del rotore, come di consueto , è rappresentato da una terna cartesiana O(X,Y,Z) con l’asse Z coincidente con l’asse di rotazione del rotore stesso. La vibrazione del rotore nella sezione alla quota zk viene indicata semplicemente con xk . Se il rotore ha comportamento lineare, poiché lo squilibrio causa forzanti armoniche di pulsazione ω coincidente con la velocità angolare del rotore, le diverse sezioni, a regime, vibreranno con legge oraria anch’essa armonica, sincrona con la forzante e, in generale, sfasata di un angolo β rispetto ad essa.
In definitiva la vibrazione potrà essere espressa sotto diverse forme:
Vibrazione nella k-esima sezione in notazione armonica (ampiezza e fase)
Vibrazione nella k-esima sezione in notazione armonica (combinazione di seno e coseno)
Vibrazione nella k-esima sezione in notazione complessa (componenti sul piano (X,Y))
Vibrazione nella k-esima sezione in notazione complessa (vettori rotanti)
)cos( βω += txx kk
)sin()cos( txtxxkk sck ωω −=
βcoskc xxk
= βsinks xxk
=
kk cck ixxx +=
tikk exx ω=
Anche lo squilibrio nella generica sezione l-esimo ul potrà essere indicato nelle forme sopra riassunte.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 3923/6/2000
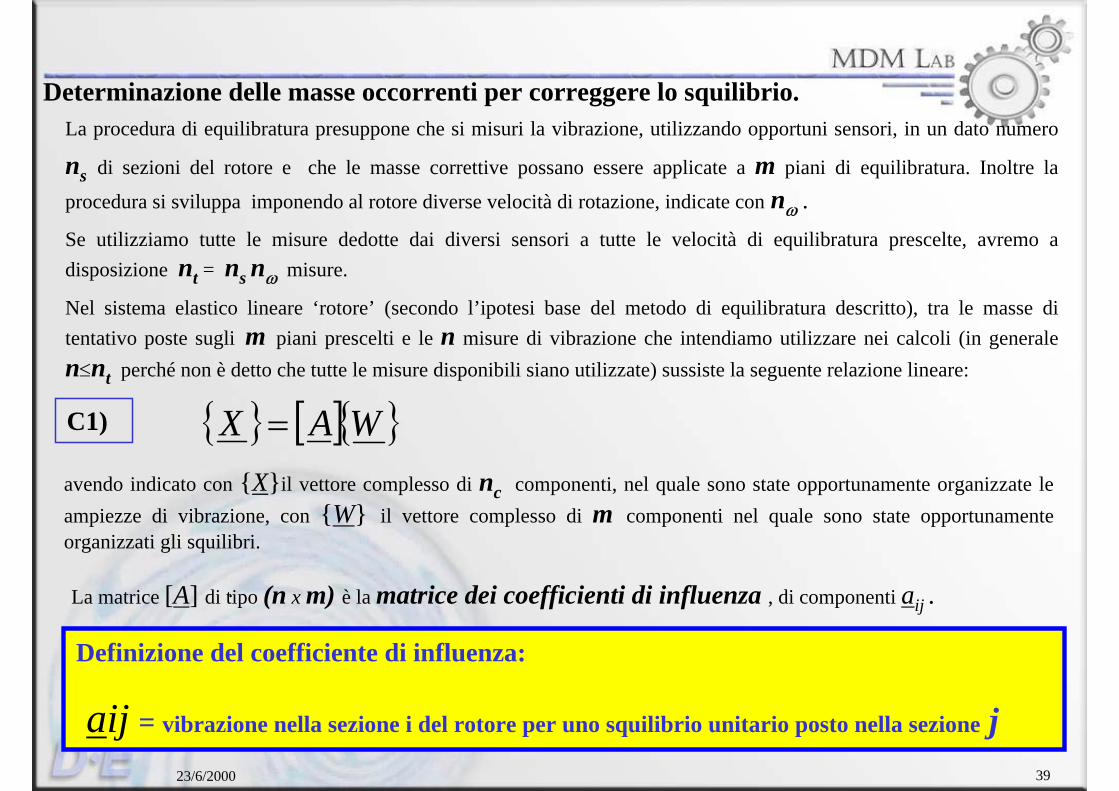
Determinazione delle masse occorrenti per correggere lo squilibrio.La procedura di equilibratura presuppone che si misuri la vibrazione, utilizzando opportuni sensori, in un dato numero
ns di sezioni del rotore e che le masse correttive possano essere applicate a m piani di equilibratura. Inoltre la
procedura si sviluppa imponendo al rotore diverse velocità di rotazione, indicate con nω .Se utilizziamo tutte le misure dedotte dai diversi sensori a tutte le velocità di equilibratura prescelte, avremo a disposizione nt = ns nω misure.
Nel sistema elastico lineare ‘rotore’ (secondo l’ipotesi base del metodo di equilibratura descritto), tra le masse di tentativo poste sugli m piani prescelti e le n misure di vibrazione che intendiamo utilizzare nei calcoli (in generale n≤nt perché non è detto che tutte le misure disponibili siano utilizzate) sussiste la seguente relazione lineare:
{ } [ ]{ }WAX =avendo indicato con {X}il vettore complesso di nc componenti, nel quale sono state opportunamente organizzate leampiezze di vibrazione, con {W} il vettore complesso di m componenti nel quale sono state opportunamente organizzati gli squilibri.
La matrice [A] di tipo (n x m) è la matrice dei coefficienti di influenza , di componenti aij ..
Definizione del coefficiente di influenza:
aij = vibrazione nella sezione i del rotore per uno squilibrio unitario posto nella sezione j
C1)
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4023/6/2000
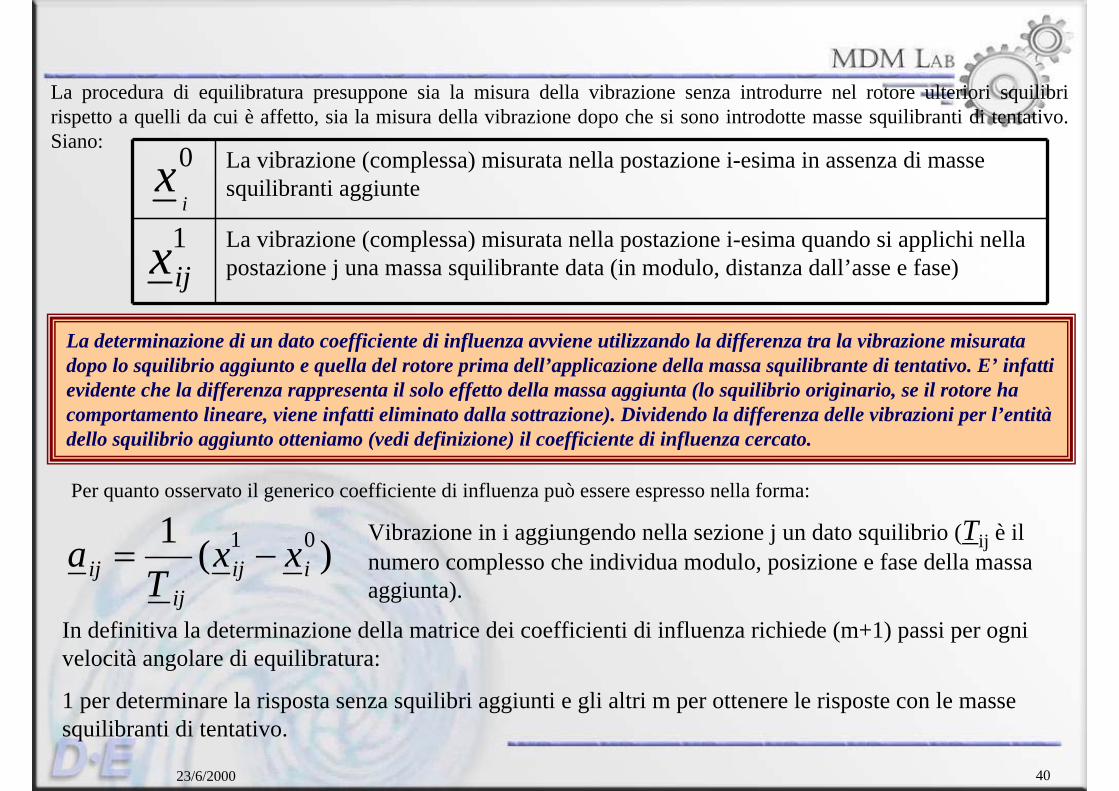
La procedura di equilibratura presuppone sia la misura della vibrazione senza introdurre nel rotore ulteriori squilibri rispetto a quelli da cui è affetto, sia la misura della vibrazione dopo che si sono introdotte masse squilibranti di tentativo. Siano:
La vibrazione (complessa) misurata nella postazione i-esima in assenza di masse squilibranti aggiunte
La vibrazione (complessa) misurata nella postazione i-esima quando si applichi nella postazione j una massa squilibrante data (in modulo, distanza dall’asse e fase)
0i
x1ijx
Per quanto osservato il generico coefficiente di influenza può essere espresso nella forma:
)(1 01iij
ijij xx
Ta −=
Vibrazione in i aggiungendo nella sezione j un dato squilibrio (Tij è il numero complesso che individua modulo, posizione e fase della massa aggiunta).
La determinazione di un dato coefficiente di influenza avviene utilizzando la differenza tra la vibrazione misurata dopo lo squilibrio aggiunto e quella del rotore prima dell’applicazione della massa squilibrante di tentativo. E’ infatti evidente che la differenza rappresenta il solo effetto della massa aggiunta (lo squilibrio originario, se il rotore ha comportamento lineare, viene infatti eliminato dalla sottrazione). Dividendo la differenza delle vibrazioni per l’entitàdello squilibrio aggiunto otteniamo (vedi definizione) il coefficiente di influenza cercato.
In definitiva la determinazione della matrice dei coefficienti di influenza richiede (m+1) passi per ogni velocità angolare di equilibratura:
1 per determinare la risposta senza squilibri aggiunti e gli altri m per ottenere le risposte con le masse squilibranti di tentativo.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4123/6/2000
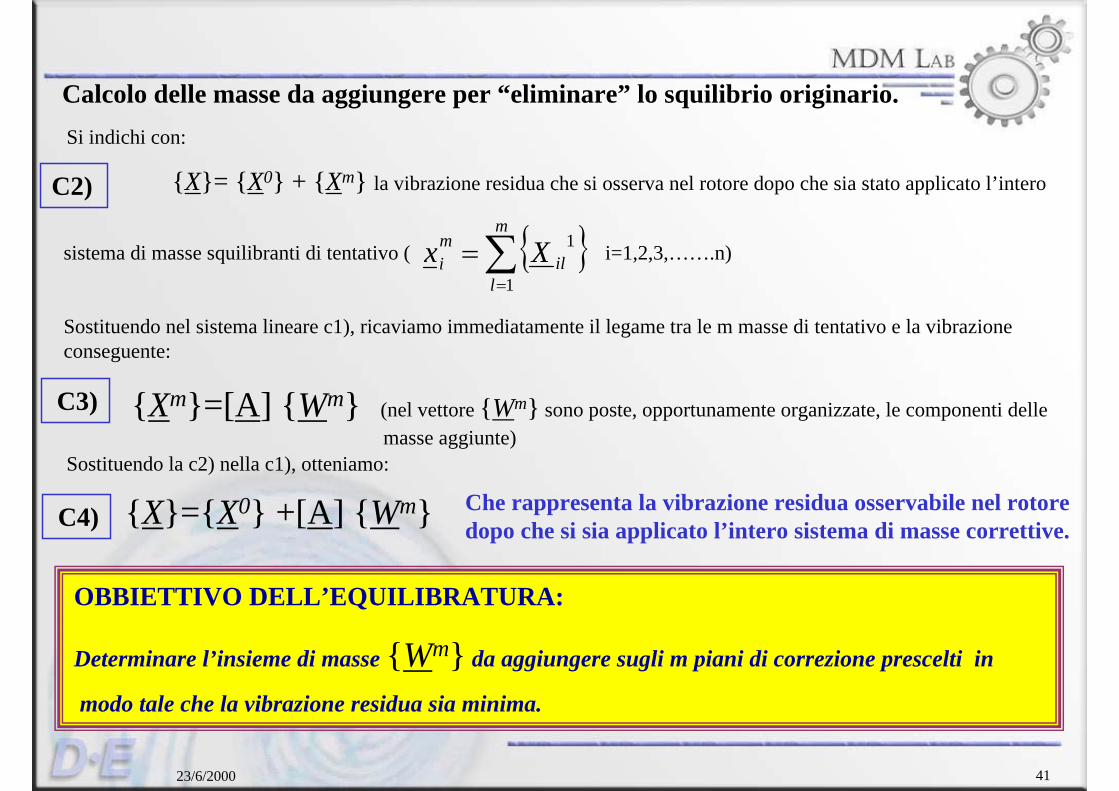
Calcolo delle masse da aggiungere per “eliminare” lo squilibrio originario.Si indichi con:
{X}= {X0} + {Xm} la vibrazione residua che si osserva nel rotore dopo che sia stato applicato l’intero
sistema di masse squilibranti di tentativo ( i=1,2,3,…….n)
Sostituendo nel sistema lineare c1), ricaviamo immediatamente il legame tra le m masse di tentativo e la vibrazione conseguente:
{ }∑=
=m
lil
mi Xx
1
1
{Xm}=[A] {Wm} (nel vettore {Wm} sono poste, opportunamente organizzate, le componenti delle masse aggiunte)
C2)
C3)
Sostituendo la c2) nella c1), otteniamo:
Che rappresenta la vibrazione residua osservabile nel rotore dopo che si sia applicato l’intero sistema di masse correttive.
OBBIETTIVO DELL’EQUILIBRATURA:
Determinare l’insieme di masse {Wm} da aggiungere sugli m piani di correzione prescelti in
modo tale che la vibrazione residua sia minima.
C4) {X}={X0} +[A] {Wm}

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4223/6/2000
Osservazioni sul numero di misure necessarie.
Considerando il sistema lineare da risolvere {X}={X0} +[A] {Wm} si hanno tre possibilità:
•(n<m ) il numero delle misure di vibrazioni disponile è inferiore al numero di piani di equilibratura. Il problema non è univocamente risolubile;
•( n = m ) il numero di misure di vibrazione disponibili coincide con il numero dei piani di correzione. Se la matrice dei coefficienti di influenza non è degenere ( det([A])≠0 ), il sistema ammette una e una sola soluzione che consente addirittura di annullare le vibrazione residua nelle postazioni di misura. Il
vettore delle masse di correzione per conseguire tale risultato è il seguente {Wm}= - [A]-1{X0};
•( n > m ) il numero delle misure disponibili supera il numero dei piani di equilibratura previsti (è il caso con cui di solito ci si confronta). Il problema (a meno che il rango della matrice dei coefficienti di influenza non sia minore o uguale a m) non ammette soluzioni in senso stretto. La soluzione cercata è
quella che minimizza una opportuna norma del vettore degli squilibri residui {X}.
Nel seguito indicheremo le metodologie disponibili per risolvere il problema indicato al terzo caso.
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4323/6/2000
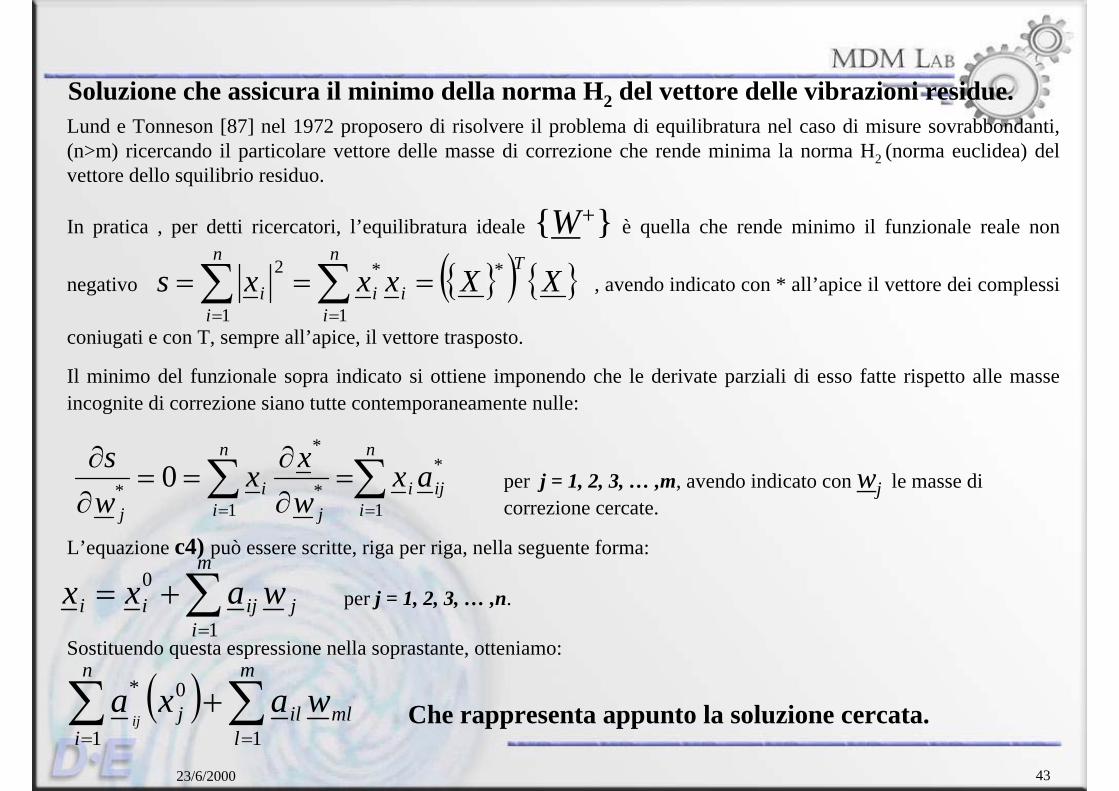
Soluzione che assicura il minimo della norma H2 del vettore delle vibrazioni residue.Lund e Tonneson [87] nel 1972 proposero di risolvere il problema di equilibratura nel caso di misure sovrabbondanti, (n>m) ricercando il particolare vettore delle masse di correzione che rende minima la norma H2 (norma euclidea) del vettore dello squilibrio residuo.
In pratica , per detti ricercatori, l’equilibratura ideale {W+} è quella che rende minimo il funzionale reale non
negativo , avendo indicato con * all’apice il vettore dei complessi
coniugati e con T, sempre all’apice, il vettore trasposto.
Il minimo del funzionale sopra indicato si ottiene imponendo che le derivate parziali di esso fatte rispetto alle masse incognite di correzione siano tutte contemporaneamente nulle:
{ }( ) { }∑ ∑= =
===n
i
Tn
iiii XXxxxs
1
*
1
*2
∑∑==
=∂∂
==∂∂ n
iiji
n
i ji
j
axwxx
ws
1
*
1*
*
* 0 per j = 1, 2, 3, … ,m, avendo indicato con wj le masse di correzione cercate.
L’equazione c4) può essere scritte, riga per riga, nella seguente forma:
∑=
+=m
ijijii waxx
1
0per j = 1, 2, 3, … ,n.
( ) ∑∑==
+m
lmlilj
n
iwaxa
ij1
0
1
*Che rappresenta appunto la soluzione cercata.
Sostituendo questa espressione nella soprastante, otteniamo:

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4423/6/2000
In termini matriciali la soluzione è esprimibile nella forma
Si noti che le matrice che premoltiplica il vettore delle masse correttive cercate è quadrata per cui la soluzione èsemplicemente fornita dalla espressione:
L’operatore algebrico è noto sotto la definizione di pseudoinversa della matrice [A].
Pregi del metodo dei minimi quadrati Difetti del metodo dei minimi quadrati
•Metodo ben noto nei problemi di ottimizzazione algebrica;•Calcoli facilmente trasponibili in un codice di calcolo.
•Il fatto che la somma dei quadrati della vibrazione residua non assicura che una o piùsezioni di misura presentino ampiezze di vibrazione eccessiva;•Possibilità di malcondizionamento della matrice da invertire.
( )[ ][ ]{ } ( )[ ]{ } 0 0** =++ XAWAATT
{ } ( )[ ][ ]( ) ( )[ ]{ } 0 0*1
* =−=−
+ XAAAWTT
( )[ ][ ]( ) 1*
−
AAT

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4523/6/2000
Soluzione che assicura il minimo della norma H1 della vibrazione residua.
Il metodo fu originalmente proposto da Goodman [60] nel 1964 e si basa sul criterio di scegliere le masse di correzione in guisa che sia resa minima la norma H1 (massimo modulo degli elementi componenti) del vettore delle vibrazioni residue.
La procedura non è di tipo chiuso come quella dei minimi quadrati, ma è di tipo iterativo e questo rappresenta il suo principale inconveniente grazie anche alla possibilità che non possa essere sempre assicurata la convergenza.
Al passo k-esimo si cerca il minimo del funzionale:
∑=
=n
iiik xs
1
2ε Essendo i pesi introdotti dati dall’espressione: ( ) ( ) 1,
1
11
−−
−−
=
== ∏ kik
kik
op p
piik rms
xrms
xεε
Essendo (rms)p la radice quadrata della media dei quadrati degli elementi della vibrazione residua al passo p
1, −kiε rappresenta un opportuno peso per accelerare la convergenza della procedura.
{ } { }p
T
n
ipi
p XXnn
xrms (1)( *1
2
==∑
=
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4623/6/2000
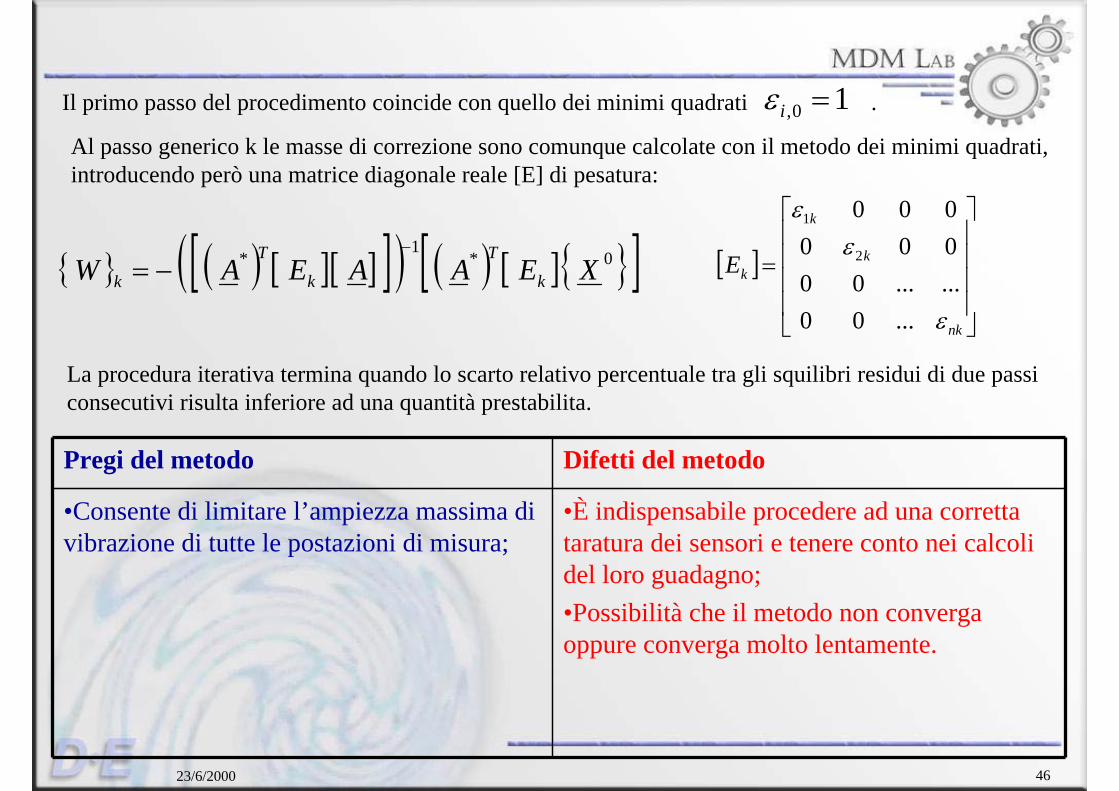
Il primo passo del procedimento coincide con quello dei minimi quadrati .10, =iεAl passo generico k le masse di correzione sono comunque calcolate con il metodo dei minimi quadrati, introducendo però una matrice diagonale reale [E] di pesatura:
{ } ( ) [ ][ ][ ]( ) ( ) [ ]{ }[ ] 0*1
* XEAAEAW k
T
k
T
k
−
−= [ ]⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
nk
k
k
kE
ε
εε
...00......00000000
2
1
La procedura iterativa termina quando lo scarto relativo percentuale tra gli squilibri residui di due passi consecutivi risulta inferiore ad una quantità prestabilita.
Pregi del metodo Difetti del metodo
•Consente di limitare l’ampiezza massima di vibrazione di tutte le postazioni di misura;
•È indispensabile procedere ad una corretta taratura dei sensori e tenere conto nei calcoli del loro guadagno;•Possibilità che il metodo non converga oppure converga molto lentamente.

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4723/6/2000
Calcolo ottimale dei coefficienti di influenza.I coefficienti di influenza possono essere calcolati semplicemente ricorrendo all’espressione già richiamata. In presenza di errori di misura e di non linearità di comportamento del rotore tale espressione è inadeguata per determinare i coefficienti di influenza con la necessaria affidabilità. Lund e Tonneson [87] proposero una procedura che migliora la precisione di stima dei coefficienti di influenza stessi.
)(1 01iij
ijij xx
Ta −=
La procedura consiste nell’utilizzo di due masse di tentativo, da applicare contemporaneamente, per ogni piano di misura. Detti:
'ijx "
ijx 'ijxΔ
"ijxΔe, , rispettivamente la vibrazione dovuta allo squilibrio
effettivamente presente e l’errore globale di misura per
le due masse, all’espressione già ricordata per la stima di aij se ne sostituisce semplicemente un’altra, ricavata come segue:
( ) ( )ij
ijijijijij
Txxxx
a00''
' Δ+−Δ+= Coefficiente di influenza con errore ottenuto con la prima massa;
Coefficiente di influenza con errore ottenuto con la seconda massa. ( ) ( )ij
ijijijijij
Txxxx
a00""
" Δ+−Δ+=
Si dimostra che l’errore di misura è in parte compensato sostituendo all’espressione già richiamata la seguente:
( ) ( )2"2'
0""*0''*
jj
iijjiijjij
TT
xxTxxTa
+
−+−=

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4823/6/2000
Sintesi della procedura di equilibratura condotta col metodo dei coefficienti di influenza.
.
Come è ovvio in tutte le procedure di equilibratura è utile disporre a priori di qualche conoscenza sul comportamentodinamico del rotore per gli usuali motivi:• Si può scegliere la posizione ottimale dei sensori;
• Si può decidere quali sono i piani di equilibratura più convenienti;
• Si può scegliere le velocità più opportune di equilibratura;
• Si possono avere indicazioni se in certe situazioni si possano superare i limiti di sicurezza della vibrazione.
La procedura avanza su passi ben precisi:
1. Si procede raccogliendo le misure relative al rotore così come si presenta (senza aggiungere masse correttive);
2. Si procede a piazzare una (o due come già osservato) su un dato piano di equilibratura e si procede a raccogliere le misure risultanti;
3. Si tolgono le masse di tentativo dal piano precedente e si procede a misurare le vibrazioni con lo squilibrio piazzato sul piano di equilibratura successivo (se il software disponibile lo consente non si rimuove l’insieme di masse squilibranti già piazzate e si procede ad aggiungere ulteriori masse sul piano di equilibratura attuale);
4. Si conosce dal calcolo l’insieme delle correzioni più opportune e le si realizza;
5. Si misura il livello delle vibrazioni residue e lo si confronta con quello aspettato dai calcoli.
In genere a questo passo, in assenza di sorprese, la procedura ha termine. Se invece il livello di vibrazione residuo non rispetta le aspettative, oppure occorre procedere nell’operazione di equilibratura verificando le vibrazioni a velocitàsuperiori, si reitera dal passo 2).
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 4923/6/2000
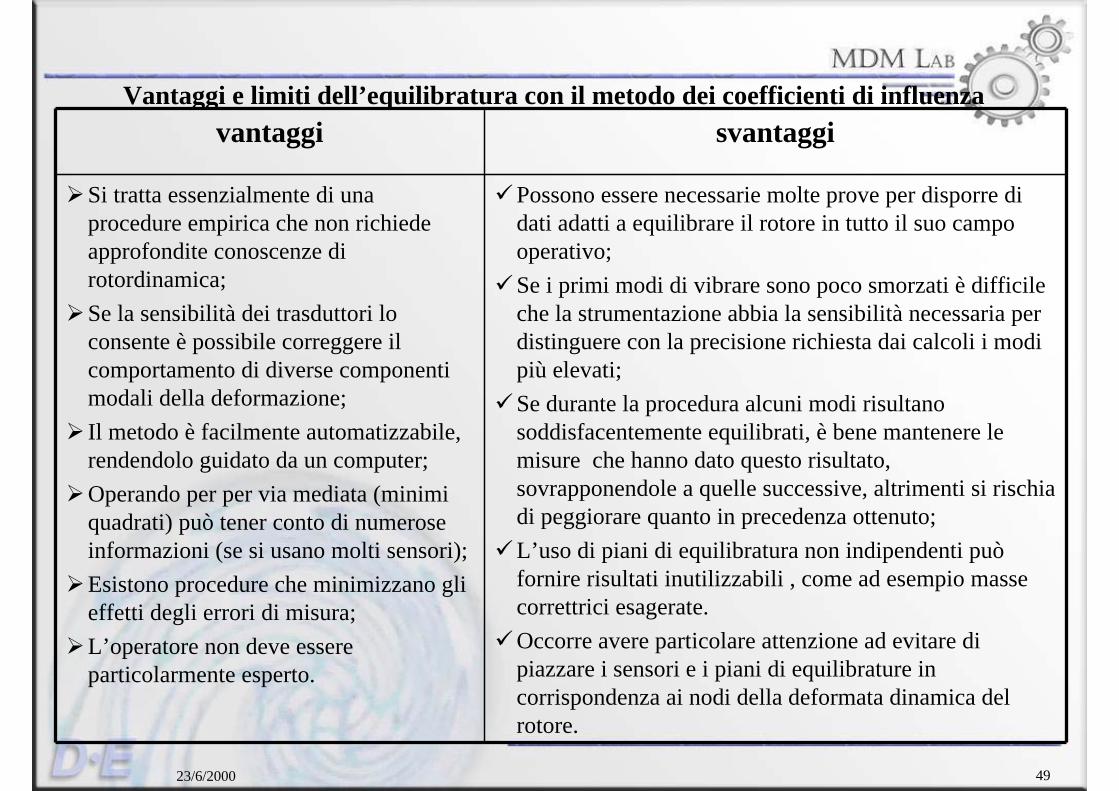
Vantaggi e limiti dell’equilibratura con il metodo dei coefficienti di influenzavantaggi svantaggi
Si tratta essenzialmente di una procedure empirica che non richiede approfondite conoscenze di rotordinamica;Se la sensibilità dei trasduttori lo consente è possibile correggere il comportamento di diverse componenti modali della deformazione;Il metodo è facilmente automatizzabile, rendendolo guidato da un computer;Operando per per via mediata (minimi quadrati) può tener conto di numerose informazioni (se si usano molti sensori);Esistono procedure che minimizzano gli effetti degli errori di misura;L’operatore non deve essere particolarmente esperto.
Possono essere necessarie molte prove per disporre di dati adatti a equilibrare il rotore in tutto il suo campo operativo;Se i primi modi di vibrare sono poco smorzati è difficile che la strumentazione abbia la sensibilità necessaria per distinguere con la precisione richiesta dai calcoli i modi più elevati;Se durante la procedura alcuni modi risultano soddisfacentemente equilibrati, è bene mantenere le misure che hanno dato questo risultato, sovrapponendole a quelle successive, altrimenti si rischia di peggiorare quanto in precedenza ottenuto;L’uso di piani di equilibratura non indipendenti può fornire risultati inutilizzabili , come ad esempio masse correttrici esagerate.Occorre avere particolare attenzione ad evitare di piazzare i sensori e i piani di equilibrature in corrispondenza ai nodi della deformata dinamica del rotore.

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5023/6/2000
Flow chart di una procedura ideale di equilibratura allo stato attuale delle conoscenze del settore
Start
Take Individual Trial Mass Data for Unaffected Modes and Calculate rw
Take Static Runout Data(for displacement sensors only)
Define Rotor Specifications
Take Uncorrected Rotor Data at Mode to be balanced at the Unaffected
Modes
Are Modal Ics Available for Mode to be Balanced?
Any Unaffected Modes?
Has Last Mode Been Balanced?
Store Modal Influence Coefficients Stop
Is the Residual Vibration
Acceptable?
Is a New Balancing
Speed Required?
Take Modal Trial Mass Data for Mode to be Balanced
Calculate Modal Correction Mass Set and Install
Take Check Balance Data
Yes
No
Yes
No
Step 1
Step 2
Step 3
Step 4
Step 5
Step 6
Step 7
No
YesNoYesStep 8Step 9
Step 10Yes
No
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5123/6/2000
BIBLIOGRAFIA SULLE TECNICHE DI EQUILIBRATURA

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5223/6/2000
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5323/6/2000

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5423/6/2000
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5523/6/2000

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5623/6/2000
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5723/6/2000
Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5823/6/2000

Nuovo PignoneFlorence Training
Center
g UNIVERSITA’ DI FIRENZEFacoltà di IngegneriaCorso GTT
GTT B --n°14 Pag. 5923/6/2000





























