-
8/19/2019 disk scheduling algorithms in os
1/32
CHAPTER 1
INTRODUCTION
1.1 Scheduling
An operating system is a program that manages the hardware and
software
resources of a computer. It is the first thing that is loaded
into memory when we turn on
the computer. Without the operating system, each programmer
would have to create a
way in which a program will display text and graphics on the
monitor. The programmer
would have to create a way to send data to a printer, tell it
how to read a disk file, and
how to deal with other programs. In the beginning, programmers
needed a way to handle
complex input/output operations. The evolution of computer
programs and their
complexities reuired new necessities. !ecause machines began to
become more
powerful, the time a program needed to run decreased.
"owever, the time needed for
handing off the euipment between different programs became
evident and this led to
programs like #$%. As we can see the acronym #$% stands
for #isk $perating %ystem.
This confirms that operating systems were originally made to
handle these complex
input/output operations like communicating among a variety of
disk drives. &arlier
computers were not as powerful as they are today. In the early
computer systems you
would only be able to run one program at a time. 'or instance,
you could not be writing a
paper and browsing the internet all at the same time.
"owever, today(s operating systems
are very capable of handling not only two but multiple
applications at the same time. In
fact, if a computer is not able to do this it is considered
useless by most computer users.
In order for a computer to be able to handle multiple
applications simultaneously, there
must be an effective way of using the )*+. %everal processes may
be running at the same
time, so there has to be some kind of order to allow each
process to get its share of )*+
time. An operating system must allocate computer resources among
the potentially
competing reuirements of multiple processes. In the case of the
processor, the resource
to be allocated is execution time on the processor and the means
of allocation is
scheduling. The scheduling function must be designed to satisfy
a number of obectives,
including fairness, lack of starvation of any particular
process, efficient use of processor
time, and low overhead. In addition, the scheduling - function
may need to take into
account different levels of priority or realtime deadlines for
the start or completion of
certain processes. $ver the years, scheduling has been the focus
of intensive research, and
many different algorithms have been implemented. Today, the
emphasis in scheduling
1
-
8/19/2019 disk scheduling algorithms in os
2/32
research is on exploiting multiprocessor systems, particularly
for multithreaded
applications, and realtime scheduling. In a multiprogramming
system, multiple processes
exist concurrently in main memory. &ach process alternates
between using a processor
and waiting for some event to occur, such as the completion of
an I/$ operation. The
processor or processors are kept busy by executing one
process while the others wait,hence the key to multiprogramming is
scheduling.
1.2 Disk Scheduling
$ne of the responsibilities of the operating system is to
use the hardware
efficiently. for the disk drives, meeting this responsibility
entails having a fast access time
and disk bandwidth. The access time has two maor components.
-. The %eek time
. The 0otational latency
The seek time is the time for the disk arm to move the heads to
the cylinder
concertinaing the desired sector. The rotational latency is the
additional time waiting for
the disk to rotate the desired sector to the disk head.
The disk bandwidth is the total number of bytes
transferred, divided by the total time
between the first reuest for service and the completion of
the last transfer. We can
improve both the access time and the bandwidth by scheduling the
servicing of disk I/$
reuest in a good order.
Whenever a process needs I/$ to or from the disk, it issues a
system call to the
operating system. The reuest specifies several pieces of
information. They are 1
•Whether this operation is input or output.
• What the disk address for the transfer is.
• What the memory address for the transfer is.
• What the number of bytes to be transferred is.
If the desired disk drive and controller are available, the
reuest can be serviced
immediately. If the drive or controller is busy, any new reuests
for service will be placed
on the ueue of pending reuests for that drive. 'or a multi
programming system with
2
-
8/19/2019 disk scheduling algorithms in os
3/32
many processes, the disk ueue may often have several pending
reuests. Thus, when one
reuest is completed, the operating system chooses which pending
reuest to service next.
CHAPTER 2
DISK SCHEDULING ALGORITHS
2.1 Types of Scheduling Algorithms
Although there are other algorithms that reduce the seek time of
all reuests, wewill concentrate on the following disk scheduling
algorithms1
'irst )ome 'irst %erve 2')'%3
%hortest %eek Time 'irst 2%%T'3
&levator 2%)A43
)ircular %)A4 2)%)A43
5$$6
These algorithms are not hard to understand, but they can
confuse someone because they
are so similar. What we are striving for by using these
algorithms is keeping "ead
7ovements 28 tracks3 to the least amount as possible. The less
the head has to move the
faster the seek time will be.
2.1.1 First Come First Serve (FCFS)
The simplest form of disk scheduling is, of course, the
firstcome, firstserved
2')'%3 Algorithm. This algorithm is intrinsically fair, but it
generally does not provide
the fastest service. )onsider, for &x, A disk ueue with
reuests for I/$ to blocks on
cylinders.
9:, -:;, ;?, ><
in that order. If the disk head is initially at cylinder ?;, it
will be first move from ?; to 9:,
then to -:;,;?, and finally to >=@
cylinders. This schedule is diagrammed in figure.
3
-
8/19/2019 disk scheduling algorithms in os
4/32
ueue 9:, -:;, ;?, ><
head starts at ?;
0 14 37 536567 98 122 124
183 199
SHOT!ST S!!" T#$! F#ST (S S T F)
.-.- 'irst )ome 'irst %erve %cheduling
2.1.2 Sh!"#es# Seek Ti$e %i"s# Scheduling &SST%'
It seems reasonable to service all the reuests close to the
current head position,
before moving the head for away to service other reuests.
This assumption is the basis
for the shortestseektimefirst 2%%T'3 algorithm. The %%T'
algorithm selects the reuest
4
-
8/19/2019 disk scheduling algorithms in os
5/32
with the minimum seek time from the current head position. %ince
seek time increases
with the number of cylinders traversed head position.
'or our example reuest ueue, the closest reuest to the initial
head position2?;3
is at cylinder >?. $nce we are at cylinder >?, the next
closest reuest is at cylinder >
-
8/19/2019 disk scheduling algorithms in os
6/32
ueue 9:, -:;, ;?, ><
head starts at ?;
0 14 37 536567 98 122 124
183 199
SHOT!ST S!!" T#$! F#ST (S S T F)
.-. %hortest %eek Time 'irst %cheduling
2.1.3 SCAN Scheduling
In the %)A4 algorithm, the disk arm starts at one end of the
disk, and moves
toward the other end, servicing reuests as it reaches each
cylinder, until it gets toward
the other end of the disk. At the other end, the direction of
head movement is reversed,
6
-
8/19/2019 disk scheduling algorithms in os
7/32
and servicing continues. The head continuously scans back and
forth across the disk. We
again use our example.
!efore applying %)A4 to schedule the reuests on cylinders
9:,-:;, ;?, and >?,>
-
8/19/2019 disk scheduling algorithms in os
8/32
ueue 9:, -:;, ;?, ><
head starts at ?;
0 14 37 53 65 67 98 122 124
183 199
%)A4 %"+5I4E
.-.; %)A4 %cheduling
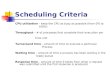
2.1.4 C-SCAN Scheduling (C SCAN)
Circular scan (C-SCAN) scheduling is a arian! "# SCAN
designed !" $r"ide a %"re uni#"r% &ai! !i%e. 'ie SCAN C-
SCAN %"es !he head #r"% "ne end "# !he dis !" !he "!her
sericing re*ues!s al"ng !he &a+. ,hen !he head reaches
!he"!her end h"&eer i! i%%edia!el+ re!urns !" !he eginning
8
-
8/19/2019 disk scheduling algorithms in os
9/32
"# !he dis &i!h"u! sericing an+ re*ues!s "n !he re!urn
!ri$.
he C-SCAN scheduling alg"ri!h% essen!iall+ !rea!s !he
c+linders as a circular lis! !ha! &ra$s ar"und #r"% !he
/nal
c+linder !" !he /rs! "ne.
ueue 9:, -:;, ;?, ><
head starts at ?;
0 14 37 536567 98 122 124183 199
.-.= ) %)A4 %cheduling
2.1.5 ' Scheduling
As we described them, both %)A4 and )%)A4 move the disk arm
across the
full width of the disk. In practice, neither algorithm is
implemented this way. 7ore
commonly, the arm goes only as the final reuest in each
direction.
9
-
8/19/2019 disk scheduling algorithms in os
10/32
Then, it reverses direction immediately, without going
all the way to the end of the
disk. These versions of %)A4 and )%)A4 are called 5$$6 and )5$$6
scheduling,
because they look for a reuest before continuing to move
in a given direction.
ueue 9:, -:;, ;?, ><
head starts at ?;
0 14 37 53 6567 98 122 124
183199
.-.? 5$$6 %cheduling
2.2 Scheduling Criteri%
#ifferent )*+ scheduling algorithms have different properties,
and the choice of a
particular algorithm may favor one class of processes over
another. In choosing which
algorithm to use in a particular situation, we must consider the
properties of the various
algorithms. 7any criteria have been suggested for comparing )*+
scheduling
algorithms. Which characteristics are used for comparison can
make a substantialdifference in which algorithm is udged to be
best. The criteria include the following1
10
-
8/19/2019 disk scheduling algorithms in os
11/32
F CPU u#ili()#i!n* We want to keep the )*+ as busy as possible.
)onceptually, )*+
utiliGation can range from @ to - @@ percent. In a real system,
it should range from =@
percent 2for a lightly loaded system3 to 9@ percent 2for a
heavily used system3.
F Th"!ugh+u#* If the )*+ is busy executing processes, then
work is being done. $ne
measure of work is the number of processes that are completed
per time unit, called
throughput. 'or long processes, this rate may be one process per
hourC for shorttransactions, it may be -@ processes per second.
F Tu"n)"!und #i$e* 'rom the point of view of a particular
process, the important
criterion is how long it takes to execute that process. The
interval from the time of
submission of a process to the time of completion is the
turnaround time. Turnaround
time is the sum of the periods spent waiting to get into memory,
waiting in the ready
ueue, executing on the )*+, and doing I/$.
F ,)i#ing #i$e* The )*+ scheduling algorithm does not affect the
amount of time during
which a process executes or does I/$C it affects only the amount
of time that a processspends waiting in the ready ueue. Waiting
time is the sum of the periods spent waiting in
the ready ueue.
F Res+!nse #i$e* In an interactive system, turnaround time may
not be the best criterion.
$ften, a process can produce some output fairly early and can
continue computing new
results while previous results are being output to the user.
Thus, another measure is the
time from the submission of a reuest until the first response is
produced. This measure,
called response time , is the time it takes to start
responding, not the time it takes to output
the response. The turnaround time is generally limited by the
speed of the output device.
= It is desirable to maximiGe )*+ utiliGation and throughput and
to minimiGe turnaround
time, waiting time, and response time. The commonly used
criteria can be categoriGed
along two dimensions too. 'irst, we can make a distinction
between useroriented and
systemoriented criteria. +ser oriented criteria relate to
the behavior of the system as
perceived by the individual user or process. An example is
response time i.e., elapsed
time between the submissions of a reuest until the response
begins to appear as output.
This uantity is visible to the user and is naturally of interest
to the user. $ther criteria are
system oriented i.e., the focus is on effective and efficient
utiliGation of the processor. An
example is throughput, which is the rate at which processes are
completed. This is
certainly a worthwhile measure of system performance and one
that we would like tomaximiGe. "owever, it focuses on system
performance rather than service provided to the
user. Thus, throughput is of concern to a system administrator
but not to the user
population. Another dimension along which criteria can be
classified is those that are
performance related and those that are not
performance related. *erformance related
criteria are uantitative and generally can be readily measured.
&xamples include
response time and throughput. )riteria that are not performance
related are either
ualitative in nature or do not lend themselves readily to
measurement and analysis. An
example of such a criterion is predictability. The following
table summariGes key
scheduling criteria. These are interdependent, and it is
impossible to optimiGe all of them
simultaneously e.g., providing good response time may reuire a
scheduling algorithm
that switches between processes freuently. This increases the
overhead of the system,
11
-
8/19/2019 disk scheduling algorithms in os
12/32
reducing throughput. Thus, the design of a scheduling policy
involves compromising
among competing reuirements.
2.- Pe"!"$)nce C!$+)"is!n
)learly, the performance of various scheduling policies is a
critical factor in the
choice of a scheduling policy. "owever, it is impossible to make
definitive comparisons
because relative performance will depend on a variety of
factors, including the probability
distribution of service times of the various processes, the
efficiency of the scheduling and
context switching mechanisms, and the nature of the I/$ demand
and the performance of
the I/$ subsystem.
2./ Selec#i!n ! ) Disk0Scheduling Alg!"i#h$
%%T' is common and has a natural appeal. %)A4 and )%)A4 perform
better for
systems that place a heavy load on the disk. *erformance depends
on the number and
types of reuests. 0euests for disk service can be influenced by
the fileallocation
method. The diskscheduling algorithm should be written as a
separate module of the
operating system, allowing it to be replaced with a different
algorithm if necessary. &ither
%%T' or 5$$6 is a reasonable choice for the default
algorithm.
12
-
8/19/2019 disk scheduling algorithms in os
13/32
CHAPTER -
ASS STORAGE SSTES
-.1 Oe"ie3 ! )ss S#!")ge S#"uc#u"e
7agnetic disks provide bulk of secondary storage of modern
computers. #rives
rotate at >@ to @@ times per second. Transfer rate is rate at
which data flow between drive
and computer. *ositioning time 2randomaccess time3 is time to
move disk arm to desired
cylinder 2seek time3 and time for desired sector to rotate under
the disk head 2rotational
latency3 #isks can be removable #rive attached to computer via
I/$ bus. !uses vary,
including &I#&, ATA, %ATA, +%!, 'iber )hannel, %)%I.
"ost controller in computer
uses bus to talk to disk controller built into drive or storage
array.
;.- 7ovinghead #isk 7echanism
13
-
8/19/2019 disk scheduling algorithms in os
14/32
-.1.1 )gne#ic Disks
Traditional magnetic disks have the following basic structure1
$ne or more
platters in the form of disks covered with magnetic media.
"ard disk platters are made of
rigid metal, while HfloppyH disks are made of more flexible
plastic. &ach platter has two
working surfaces. $lder hard disk drives would sometimes not use
the very top or bottom
surface of a stack of platters, as these surfaces were more
susceptible to potential damage.
&ach working surface is divided into a number of concentric
rings called tracks. The
collection of all tracks that are the same distance from the
edge of the platter, 2i.e. all
tracks immediately above one another in the following diagram3
is called a cylinder. &ach
track is further divided into sectors, traditionally containing
?- bytes of data each,
although some modern disks occasionally use larger sector siGes.
2%ectors also include a
header and a trailer, including checksum information among other
things. 5arger sector
siGes reduce the fraction of the disk consumed by headers and
trailers, but increase
internal fragmentation and the amount of disk that must be
marked bad in the case of
errors.3 The data on a hard drive is read by readwrite heads.
The standard configuration
uses one head per surface, each on a separate arm, and
controlled by a common arm
assembly which moves all heads simultaneously from one cylinder
to another. 2$ther
configurations, including independent readwrite heads, may speed
up disk access, but
involve serious technical difficulties.3 The storage capacity of
a traditional disk drive iseual to the number of heads 2i.e. the
number of working surfaces3, times the number of
tracks per surface, times the number of sectors per track, times
the number of bytes per
sector. A particular physical block of data is specified by
providing the headsector
cylinder number at which it is located. In operation the disk
rotates at high speed, such as
-
8/19/2019 disk scheduling algorithms in os
15/32
overall transfer rate, including seek time and rotational
latency as well as the electronic
data transfer rate3.
#isk heads HflyH over the surface on a very thin cushion of air.
If they should
accidentally contact the disk, then a head crash occurs, which
may or may not
permanently damage the disk or even destroy it completely.
'or this reason it is normal to
park the disk heads when turning a computer off, which
means to move the heads off thedisk or to an area of the disk where
there is no data stored.
'loppy disks are normally removable. "ard drives can also be
removable, and
some are even hotswappable, meaning they can be removed while
the computer is
running, and a new hard drive inserted in their place.
#isk drives are connected to the computer via a cable known as
the I/$ !us. %ome
of the common interface formats include &nhanced Integrated
#rive &lectronics, &I#&C
Advanced Technology Attachment, ATAC %erial ATA, %ATA, +niversal
%erial !us, +%!C
'iber )hannel, '), and %mall )omputer %ystems Interface,
%)%I.
The host controller is at the computer end of the I/$ bus, and
the disk controller is
built into the disk itself. The )*+ issues commands to the
host controller via I/$ ports.
#ata is transferred between the magnetic surface and onboard
cache by the disk
controller, and then the data is transferred from that cache to
the host controller and the
motherboard memory at electronic speeds.
-.1.2 S!lid0S#)#e DisksAs technologies improve and economics
change, old technologies are often used
in different ways. $ne example of this is the increasing used of
solid state disks, or %%#s.
%%#s use memory technology as a small fast hard disk. %pecific
implementations may
use either flash memory or #0A7 chips protected by a battery to
sustain the information
through power cycles. !ecause %%#s have no moving parts they are
much faster than
traditional hard drives, and certain problems such as the
scheduling of disk accesses
simply do not apply. "owever %%#s also have their weaknesses1
They are more
expensive than hard drives, generally not as large, and may have
shorter life spans. %%#s
are especially useful as a highspeed cache of harddisk
information that must be accesseduickly. $ne example is to store
filesystem metadata, e.g. directory and inode
information, that must be accessed uickly and often. Another
variation is a boot disk
containing the $% and some application executables, but no vital
user data. %%#s are also
used in laptops to make them smaller, faster, and lighter.
!ecause %%#s are so much
faster than traditional hard disks, the throughput of the bus
can become a limiting factor,
causing some %%#s to be connected directly to the system *)I bus
for example.
-.1.- )gne#ic T)+es
15
-
8/19/2019 disk scheduling algorithms in os
16/32
7agnetic tapes were once used for common secondary storage
before the days of
hard disk drives, but today are used primarily for backups.
Accessing a particular spot on
a magnetic tape can be slow, but once reading or writing
commences, access speeds are
comparable to disk drives. )apacities of tape drives can range
from @ to @@ E!, and
compression can double that capacity.
-.2 Disk S#"uc#u"e
#isk drives are addressed as large -dimensional arrays of
logical blocks, where
the logical block is the smallest unit of transfer. The
-dimensional array of logical blocks
is mapped into the sectors of the disk seuentially. %ector @ is
the first sector of the first
track on the outermost cylinder. 7apping proceeds in order
through that track, then the
rest of the tracks in that cylinder, and then through the rest
of the cylinders from
outermost to innermost. The traditional headsectorcylinder, "%)
numbers are mappedto linear block addresses by numbering the first
sector on the first head on the outermost
track as sector @. 4umbering proceeds with the rest of the
sectors on that same track, and
then the rest of the tracks on the same cylinder before
proceeding through the rest of the
cylinders to the center of the disk. In modern practice these
linear block addresses are
used in place of the "%) numbers for a variety of reasons. The
linear length of tracks
near the outer edge of the disk is much longer than for those
tracks located near the
center, and therefore it is possible to sueeGe many more sectors
onto outer tracks than
onto inner ones. All disks have some bad sectors, and therefore
disks maintain a few spare
sectors that can be used in place of the bad ones. The mapping
of spare sectors to bad
sectors in managed internally to the disk controller. 7odern
hard drives can have
thousands of cylinders, and hundreds of sectors per track on
their outermost tracks. These
numbers exceed the range of "%) numbers for many 2older3
operating systems, and
therefore disks can be configured for any convenient combination
of "%) values that
falls within the total number of sectors physically on the
drive. There is a limit to how
closely packed individual bits can be placed on a physical
media, but that limit is growing
increasingly more packed as technological advances are made.
• 7odern disks pack many more sectors into outer cylinders than
inner ones, using
one of two approaches1
o With )onstant 5inear elocity , )5 ,
the density of bits is uniform from
cylinder to cylinder. !ecause there are more sectors in outer
cylinders, the
disk spins slower when reading those cylinders, causing the rate
of bits
passing under the readwrite head to remain constant. This
is the approach
used by modern )#s and ##s.
• With )onstant Angular elocity , )A ,
the disk rotates at a constant angular
speed, with the bit density decreasing on outer cylinders.
2These disks would have
a constant number of sectors per track on all cylinders3.
16
-
8/19/2019 disk scheduling algorithms in os
17/32
-.- H!s# A##)ched S#!")ge
5ocal disks are accessed through I/$ *orts as described earlier.
The most common
interfaces are I#& or ATA, each of which allow up to two
drives per host controller.
%ATA is similar with simpler cabling. "igh end workstations or
other systems in need oflarger number of disks typically use %)%I
disks1 The %)%I standard supports up to ->
targets on each %)%I bus, one of which is generally the host
adapter and the other -? of
which can be disk or tape drives. A %)%I target is usually a
single drive, but the standard
also supports up to : units within each target. These would
generally be used for
accessing individual disks within a 0AI# array. The %)%I
standard also supports multiple
host adapters in a single computer, i.e. multiple %)%I busses.
7odern advancements in
%)%I include HfastH and HwideH versions, as well as %)%I. %)%I
cables may be either ?@
or >: conductors. %)%I devices may be external as well as
internal. ') is a highspeed
serial architecture that can operate over optical fiber or
fourconductor copper wires, andhas two variants. A large switched
fabric having a =bit address space. This variant
allows for multiple devices and multiple hosts to interconnect,
forming the basis for the
storagearea networks, %A4s, to be discussed in a future section.
The arbitrated loop, ')
A5, that can address up to -> devices 2drives and
controllers3.
-./ Ne#3!"k A##)ched S#!")ge
4etwork attached storage connects storage devices to
computers using a remote
procedure call, 0*), interface, typically with something
like 4'% filesystem mounts.This is convenient for allowing several
computers in a group common access and naming
conventions for shared storage. 4A% can be implemented using
%)%I cabling, or I%)%I
uses Internet protocols and standard network connections,
allowing longdistance remote
access to shared files. 4A% allows computers to easily share
data storage, but tends to be
less efficient than standard hostattached storage.
;.= 4etworkattached storage
17
-
8/19/2019 disk scheduling algorithms in os
18/32
-.4 S#!")ge A"e) Ne#3!"k
A %torageArea 4etwork, %A4, connects computers and storage
devices in a
network, using storage protocols instead of network protocols.
$ne advantage of this is
that storage access does not tie up regular networking
bandwidth. %A4 is very flexibleand dynamic, allowing hosts and
devices to attach and detach on the fly. %A4 is also
controllable, allowing restricted access to certain hosts and
devices.
;.? %toragearea network
-.5 Disk %!"$)##ing
!efore a disk can be used, it has to be lowlevel formatted,
which means laying
down all of the headers and trailers marking the beginning and
ends of each sector.
Included in the header and trailer are the linear sector
numbers, and errorcorrecting
codes, &)), which allow damaged sectors to not only be
detected, but in many cases for
the damaged data to be recovered 2depending on the extent of the
damage.3 %ector siGes
are traditionally ?- bytes, but may be larger, particularly in
larger drives. &))
calculation is performed with every disk read or write, and if
damage is detected but the
data is recoverable, then a soft error has occurred. %oft errors
are generally handled by the
onboard disk controller, and never seen by the $%. $nce the disk
is lowlevel formatted,
the next step is to partition the drive into one or more
separate partitions. This step must
be completed even if the disk is to be used as a single
large partition, so that the partition
table can be written to the beginning of the disk. After
partitioning, then the filesystems
must be logically formatted, which involves laying down the
master directory information2'AT table or inode structure3,
initialiGing free lists, and creating at least the root
directory
18
-
8/19/2019 disk scheduling algorithms in os
19/32
of the filesystem. 2#isk partitions which are to be used as raw
devices are not logically
formatted. This saves the overhead and disk space of the
filesystem structure, but reuires
that the application program manage its own disk storage
reuirements3.
-.6 7!!# 7l!ck
)omputer 0$7 contains a bootstrap program 2$% independent3 with
ust enough
code to find the first sector on the first hard drive on the
first controller, load that sector
into memory, and transfer control over to it. 2The 0$7 bootstrap
program may look in
floppy and/or )# drives before accessing the hard drive, and is
smart enough to
recogniGe whether it has found valid boot code or not.3. The
first sector on the hard drive
is known as the 7aster !oot 0ecord, 7!0, and contains a very
small amount of code in
addition to the partition table. The partition table documents
how the disk is partitioned
into logical disks, and indicates specifically which partition
is the active or boot partition.
The boot program then looks to the active partition to find an
operating system, possibly
loading up a slightly larger / more advanced boot program along
the way. In a dualboot
2or larger multiboot3 system, the user may be given a choice of
which operating system
to boot, with a default action to be taken in the event of no
response within some time
frame. $nce the kernel is found by the boot program, it is
loaded into memory and then
control is transferred over to the $%. The kernel will normally
continue the boot process
by initialiGing all important kernel data structures,
launching important system services
and finally providing one or more login prompts. !oot options at
this stage may include
singleuser a.k.a. maintenance or safe modes, in which very few
system services are
started. These modes are designed for system administrators to
repair problems or otherwise maintain the system.
;.< !oot !lock
19
-
8/19/2019 disk scheduling algorithms in os
20/32
-.8 7)d 7l!cks
4o disk can be manufactured to -@@J perfection, and all
physical obects wear
out over time. 'or these reasons all disks are shipped with a
few bad blocks, and
additional blocks can be expected to go bad slowly over time. If
a large number of blocks
go bad then the entire disk will need to be replaced, but a few
here and there can be
handled through other means. In the old days, bad blocks had to
be checked for manually.
'ormatting of the disk or running certain diskanalysis tools
would identify bad blocks,
and attempt to read the data off of them one last time through
repeated tries. Then the bad
blocks would be mapped out and taken out of future
service. %ometimes the data could be
recovered, and sometimes it was lost forever. 2#isk analysis
tools could be either
destructive or nondestructive3. 7odern disk controllers make
much better use of the
errorcorrecting codes, so that bad blocks can be detected
earlier and the data usually
recovered. 20ecall that blocks are tested with every write as
well as with every read, so
often errors can be detected before the write operation is
complete, and the data simply
written to a different sector instead3. 4ote that remapping of
sectors from their normallinear progression can throw off the disk
scheduling optimiGation of the $%, especially if
the replacement sector is physically far away from the sector it
is replacing. 'or this
reason most disks normally keep a few spare sectors on each
cylinder, as well as at least
one spare cylinder. Whenever possible a bad sector will be
mapped to another sector on
the same cylinder, or at least a cylinder as close as possible.
%ector slipping may also be
performed, in which all sectors between the bad sector and
the replacement sector are
moved down by one, so that the linear progression of sector
numbers can be maintained.
If the data on a bad block cannot be recovered, then a hard
error has occurred., which
reuires replacing the file2s3 from backups, or rebuilding them
from scratch.
20
-
8/19/2019 disk scheduling algorithms in os
21/32
CHAPTER /
RAID
/.1 RAID S#"uc#u"e
The general idea behind 0AI# is to employ a group of hard drives
together with
some form of duplication, either to increase reliability or to
speed up operations, 2 or
sometimes both3. 0AI# originally stood for 0edundant Array of
Inexpensive #isks, and
was designed to use a bunch of cheap small disks in place of one
or two larger more
expensive ones. Today 0AI# systems employ large possibly
expensive disks as their
components, switching the definition to Independent disks.
/.2 I$+"!e$en# ! Reli)9ili#: i) Redund)nc:
The more disks a system has, the greater the likelihood that one
of them will go
bad at any given time. "ence increasing disks on a system
actually decreases the 7ean
Time To 'ailure, 7TT' of the system. If, however, the same data
was copied onto
multiple disks, then the data would not be lost unless both
copies of the data were
damaged simultaneously, which is a 7+)" lower probability than
for a single disk going bad. 7ore specifically, the second
disk would have to go bad before the first disk was
repaired, which brings the 7ean Time To 0epair into play. 'or
example if two disks were
involved, each with a 7TT' of -@@,@@@ hours and a 7TT0 of -@
hours, then the 7ean
Time to #ata 5oss would be ?@@ K -@L> hours, or ?
-
8/19/2019 disk scheduling algorithms in os
22/32
/.- I$+"!e$en# in Pe"!"$)nce i) P)")llelis$
There is also a performance benefit to mirroring, particularly
with respect to reads.
%ince every block of data is duplicated on multiple disks, read
operations can be satisfied
from any available copy, and multiple disks can be reading
different data blocks
simultaneously in parallel. 2Writes could possibly be sped up as
well through careful
scheduling algorithms, but it would be complicated in practice3.
Another way of
improving disk access time is with striping, which basically
means spreading data out
across multiple disks that can be accessed simultaneously. With
bitlevel striping the bits
of each byte are striped across multiple disks. 'or example if :
disks were involved, then
each :bit byte would be read in parallel by : heads on separate
disks. A single disk read
would access : K ?- bytes =6 worth of data in the time normally
reuired to read ?-
bytes. %imilarly if = disks were involved, then two bits
of each byte could be stored oneach disk, for 6 worth of disk
access per read or write operation. !locklevel striping
spreads a filesystem across multiple disks on a blockbyblock
basis, so if block 4 were
located on disk @, then block 4 M - would be on disk -, and so
on. This is particularly
useful when filesystems are accessed in clusters of physical
blocks. $ther striping
possibilities exist, with blocklevel striping being the
most common.
/./ RAID Leels7irroring provides reliability but is expensiveC
%triping improves performance,
but does not improve reliability. Accordingly there are a
number of different schemes that
combine the principals of mirroring and striping in different
ways, in order to balance
reliability versus performance versus cost. These are described
by different 0AI# levels,
as follows1
0aid 5evel @ This level includes striping only, with no
mirroring.
0aid 5evel - This level includes mirroring only, no
striping.
0aid 5evel This level stores errorcorrecting codes on additional
disks, allowing for
any damaged data to be reconstructed by subtraction from the
remaining undamaged data.
4ote that this scheme reuires only three extra disks to
protect = disks worth of data, as
opposed to full mirroring. 2The number of disks reuired is a
function of the error
correcting algorithms, and the means by which the particular bad
bit2s3 is2are3 identified3.
22
-
8/19/2019 disk scheduling algorithms in os
23/32
0aid 5evel ; This level is similar to level , except that it
takes advantage of the fact
that each disk is still doing its own errordetection, so that
when an error occurs, there is
no uestion about which disk in the array has the bad data. As a
result a single parity bit is
all that is needed to recover the lost data from an array of
disks. 5evel ; also includes
striping, which improves performance. The downside with the
parity approach is thatevery disk must take part in every disk
access, and the parity bits must be constantly
calculated and checked, reducing performance. "ardwarelevel
parity calculations and
40A7 cache can help with both of those issues. In practice
level ; is greatly preferred
over level .
0aid 5evel = This level is similar to level ;, employing
blocklevel striping instead of
bitlevel striping. The benefits are that multiple blocks
can be read independently, and
changes to a block only reuire writing two blocks 2data and
parity3 rather than involving
all disks. 4ote that new disks can be added seamlessly to the
system provided they are
initialiGed to all Geros, as this does not affect the parity
results.
0aid 5evel ? This level is similar to level =, except the parity
blocks are distributed over
all disks, thereby more evenly balancing the load on the system.
'or any given block on
the disk2s3, one of the disks will hold the parity information
for that block and the other
4- disks will hold the data. 4ote that the same disk
cannot hold both data and parity for
the same block, as both would be lost in the event of a disk
crash.
0aid 5evel > This level extends raid level ? by storing
multiple bits of errorrecovery
codes, 2such as the 0eed%olomon codes3, for each bit position of
data, rather than a
single parity bit. In the example shown below bits of &))
are stored for every = bits of
data, allowing data recovery in the face of up to two
simultaneous disk failures. 4ote that
this still involves only ?@J increase in storage needs, as
opposed to -@@J for simple
mirroring which could only tolerate a single disk failure.
23
-
8/19/2019 disk scheduling algorithms in os
24/32
=.= 2a3 0AI# levels
There are also two 0AI# levels which combine 0AI# levels @ and -
2striping and
mirroring3 in different combinations, designed to provide both
performance and reliability
at the expense of increased cost.
0AI# level @ M - disks are first striped, and then the striped
disks mirrored to another set.
This level generally provides better performance than 0AI# level
?.
0AI# level - M @ mirrors disks in pairs, and then stripes the
mirrored pairs. The storage
capacity, performance, etc. are all the same, but there is an
advantage to this approach inthe event of multiple disk failures,
as illustrated below.
24
-
8/19/2019 disk scheduling algorithms in os
25/32
In diagram 2a3 below, the : disks have been divided into two
sets of four, each of which is
striped, and then one stripe set is used to mirror the other
set. If a single disk fails, it
wipes out the entire stripe set, but the system can keep on
functioning using the remaining
set.
"owever if a second disk from the other stripe set now fails,
then the entire system is lost,as a result of two disk failures. In
diagram 2b3, the same : disks are divided into four sets
of two, each of which is mirrored, and then the file system is
striped across the four sets
of mirrored disks. If a single disk fails, then that mirror set
is reduced to a single disk, but
the system rolls on, and the other three mirror sets continue
mirroring.
4ow if a second disk fails, 2that is not the mirror of the
already failed disk3, then another
one of the mirror sets is reduced to a single disk, but the
system can continue without data
loss. In fact the second arrangement could handle as many as
four simultaneously failed
disks, as long as no two of them were from the same mirror
pair.
=.= 2b3 0AI# @ M - and - M @
25
-
8/19/2019 disk scheduling algorithms in os
26/32
/.4 P"!9le$s 3i#h RAID
0AI# protects against physical errors, but not against any
number of bugs or other
errors that could write erroneous data. N'% adds an extra level
of protection by including
data block checksums in all inodes along with the pointers to
the data blocks. If data are
mirrored and one copy has the correct checksum and the other
does not, then the data
with the bad checksum will be replaced with a copy of the data
with the good checksum.
This increases reliability greatly over 0AI# alone, at a cost of
a performance hit that is
acceptable because N'% is so fast to begin with. Another problem
with traditional
filesystems is that the siGes are fixed, and relatively
difficult to change. Where 0AI# sets
are involved it becomes even harder to adust filesystem siGes,
because a filesystem
cannot span across multiple filesystems. N'% solves these
problems by pooling 0AI#sets, and by dynamically allocating space
to filesystems as needed. 'ilesystem siGes can
be limited by uotas, and space can also be reserved to
guarantee that a filesystem will be
able to grow later, but these parameters can be changed at any
time by the filesystemOs
owner. $therwise filesystems grow and shrink dynamically as
needed.
26
-
8/19/2019 disk scheduling algorithms in os
27/32
CHAPTER 4
TERTIAR STORAGE
4.1 Te"#i)": S#!")ge S#"uc#u"e
*rimary storage refers to computer memory chipsC %econdary
storage refers to
fixeddisk storage systems 2hard drives3C And Tertiary %torage
refers to removable media,
such as tape drives, )#s, ##s, and to a lesser extend floppies,
thumb drives, and other
detachable devices. Tertiary storage is typically characteriGed
by large capacity, low cost
per 7!, and slow access times, although there are
exceptions in any of these categories.
Tertiary storage is typically used for backups and for longterm
archival storage of
completed work. Another common use for tertiary storage is to
swap large littleused files
2or groups of files3 off of the hard drive, and then swap them
back in as needed in a
fashion similar to secondary storage providing swap space for
primary storage
4.2 Re$!)9le Disks
0emovable magnetic disks 2e.g. floppies3 can be nearly as fast
as hard drives, but
are at greater risk for damage due to scratches. ariations of
removable magnetic disks up
to a E! or more in capacity have been developed. 2"otswappable
hard drives3. A
magnetooptical disk uses a magnetic disk covered in a clear
plastic coating that protects
the surface. The heads sit a considerable distance away from the
magnetic surface, and asa result do not have enough magnetic
strength to switch bits at normal room temperature.
'or writing, a laser is used to heat up a specific spot on the
disk, to a temperature at which
the weak magnetic field of the write head is able to flip the
bits. 'or reading, a laser is
shined at the disk, and the 6err effect causes the polariGation
of the light to become
rotated either clockwise or counterclockwise depending on the
orientation of the
magnetic field. $ptical disks do not use magnetism at all, but
instead use special materials
that can be altered 2by lasers3 to have relatively light or dark
spots. 'or example the
phasechange disk has a material that can be froGen into
either a crystalline or an
amorphous state, the latter of which is less transparent and
reflects less light when a laser is bounced off a reflective
surface under the material. Three powers of lasers are used
with phasechange disks1 2-3 a low power laser is used to read
the disk, without effecting
the materials. 23 A medium power erases the disk, by melting and
refreeGing the
medium into a crystalline state, and 2;3 a high power writes to
the disk by melting the
medium and refreeGing it into the amorphous state. The most
common examples of these
disks are rewritable )#0Ws and ##0Ws. An alternative to the
disks described
above are Write$nce 0ead7any, W$07 drives. The original version
of W$07 drives
involved a thin layer of aluminum sandwiched between two
protective layers of glass or
plastic. "oles were burned in the aluminum to write bits.
!ecause the holes could not be
filled back in, there was no way to rewrite to the disk.
2Although data could be erased by
burning more holes3. W$07 drives have important legal
ramifications for data that must
27
-
8/19/2019 disk scheduling algorithms in os
28/32
be stored for a very long time and must be provable in
court as unaltered since it was
originally written. 2%uch as longterm storage of medical
records.3 7odern )#0 and
##0 disks are examples of W$07 drives that use organic polymer
inks instead of an
aluminum layer. 0eadonly disks are similar to W$07 disks, except
the bits are pressed
onto the disk at the factory, rather than being burned on one by
one.
4.- T)+es
Tape drives typically cost more than disk drives, but the cost
per 7! of the tapes
themselves is lower. Tapes are typically used today for backups,
and for enormous
volumes of data stored by certain scientific establishments.
2&.g. 4A%AOs archive of space
probe and satellite imagery, which is currently being
downloaded from numerous sources
faster than anyone can actually look at it.3 0obotic tape
changers move tapes from drives
to archival tape libraries upon demand.
4./ O+e")#ing0S:s#e$ Su++!"#
The $% must provide support for tertiary storage as removable
media, including
the support to transfer data between different systems
4./.1 A++lic)#i!n In#e")ce
'ile systems are typically not stored on tapes. 2It might be
technically possible,
but it is impractical3. Tapes are also not lowlevel
formatted, and do not use fixedlength
blocks. 0ather data is written to tapes in variable length
blocks as needed. Tapes are
normally accessed as raw devices, reuiring each application to
determine how the data is
to be stored and read back. Issues such as header contents and
A%)II versus binary
encoding 2and byteordering3 are generally application specific.
!asic operations
supported for tapes include locate2 3, read2 3, write2 3, and
readPposition2 3. 2!ecause of
variable length writes3, writing to a tape erases all data that
follows that point on the tape.
Writing to a tape places the &nd of Tape 2&$T3 marker at
the end of the data written. It is
not possible to locate2 3 to any spot past the &$T
marker.
4./.2 %ile N)$ing
'ile naming conventions for removable media are not entirely
uniuely specific,
nor are they necessarily consistent between different systems.
2Two removable disks may
contain files with the same name, and there is no clear way for
the naming system to
distinguish between them3. 'ortunately music )#s have a common
format, readable by
all systems. #ata )#s and ##s have only a few format choices,
making it easy for a
system to support all known formats.
28
-
8/19/2019 disk scheduling algorithms in os
29/32
4./.- Hie")"chic)l S#!")ge )n)ge$en#
"ierarchical storage involves extending file systems out onto
tertiary storage,
swapping files from hard drives to tapes in much the same manner
as data blocks are
swapped from memory to hard drives. A placeholder is generally
left on the hard drive,
storing information about the particular tape 2or other
removable media3 on which the file
has been swapped out to. A robotic system transfers data to and
from tertiary storage as
needed, generally automatically upon demand of the file2s3
involved.
4.4 Pe"!"$)nce Issues
There are certain performance issues that are to be considered
such as speed, cost,
reliability.
4.4.1 S+eed
%ustained !andwidth is the rate of data transfer during a large
file transfer, once
the proper tape is loaded and the file located. &ffective
!andwidth is the effective overall
rate of data transfer, including any overhead necessary to load
the proper tape and find the
file on the tape. Access 5atency is all of the accumulated
waiting time before a file can be
actually read from tape. This includes the time it takes to find
the file on the tape, the time
to load the tape from the tape library, and the time spent
waiting in the ueue for the tape
drive to become available. )learly tertiary storage access is
much slower than secondary
access, although removable disks 2e.g. a )# ukebox3 have
somewhat faster access than a
tape library.
4.4.2 Reli)9ili#:
'ixed hard drives are generally more reliable than removable
drives, because they
are less susceptible to the environment. $ptical disks are
generally more reliable than
magnetic media. A fixed hard drive crash can destroy all data,
whereas an optical drive or
tape drive failure will often not harm the data media, 2and
certainly canOt damage any
media not in the drive at the time of the failure3. Tape drives
are mechanical devices, and
can wear out tapes over time, 2as the tape head is generally in
much closer physical
contact with the tape than disk heads are with platters3. %ome
drives may only be able to
read tapes a few times whereas other drives may be able to reuse
the same tapes millions
of times. !ackup tapes should be read after writing, to verify
that the backup tape is
readable. 5ongterm tape storage can cause degradation, as
magnetic fields HdriftH from
29
-
8/19/2019 disk scheduling algorithms in os
30/32
one layer of tape to the adacent layers. *eriodic fastforwarding
and rewinding of tapes
can help, by changing which section of tape lays against which
other layers.
4.4.- C!s#
The cost per megabyte for removable media is its strongest
selling feature,
particularly as the amount of storage involved 2i.e. the
number of tapes, )#s, etc3
increases. "owever the cost per megabyte for hard drives has
dropped more rapidly over
the years than the cost of removable media, such that the
currently most costeffective
backup solution for many systems is simply an additional
2external3 hard drive.
30
-
8/19/2019 disk scheduling algorithms in os
31/32
CHAPTER 5
CONCLUSION
#isk %cheduling algorithms play important role in the operating
systems. ItminimiGes the seek time also decreases the seek time
which in turn decreases the seek
distance. It provides the fast access time.
*erformance depends on the number of reuests and %)A4 and
)%)A4 are for
systems that place a heavy load on the disk. #efault algorithms
used are %%T' and
5$$6. #isk scheduling algorithms are used to allocate the
services to the I/$ reuests on
the disk and improve its performance.
31
-
8/19/2019 disk scheduling algorithms in os
32/32
RE%ERENCES
Q-R $perating %ystem by Ealvin
QR William %tallings, $perating %ystem, @@<
Q;R en.wikipedia.org
Q=R www.cs.it.edu
Q?R www.cs.uregina.ca