Embed Size (px)
Citation preview

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Chương I
GIỚI THIỆU ĐỀ TÀI
Đề tài của em là “Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng vi điều khiển 8051” với giao diện thân thiện với con người. Mục đích là kết hợp được các kiến thức đã học về tính toán thiết kế mạch, lập trình trên vi điều khiển và trên giao diện phần mềm để thực hiện giao tiếp giữa vi điều khiển với PC nhằm điều khiển hoạt động của thiết bị ngoại vi là động cơ bước một cách linh hoạt.
Các mảng chính trong nội dung của thuyết minh là :
- Động cơ bước – hoạt động và nguyên lí điều khiển.
- Giao tiếp vi điều khiển P89V51RB2 với máy tính thông qua cáp RS232 9 chân.
- Lập trình giao diện điều khiển bằng Visual Basic 6.0.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 3

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
I.1 Giới thiệu động cơ bước :
Theo quyển “Động cơ bước – kĩ thuật điều khiển và ứng dụng” (Nguyễn Quang Hùng – Trần Ngọc Bình) động cơ bước là loại động cơ không đồng bộ dùng để biến đổi các tín hiệu điều khiển dưới dạng các xung điện rời rạc kế tiếp nhau thành các chuyển động góc quay của rotor. Góc quay này có giá trị nhất định phụ thuộc vào xung điện áp cấp vào stator theo kiểu nào, và được định nghĩa là góc bước của rotor. Thông thường góc bước này rất nhỏ, có loại có thể đạt đến 0,720, và phổ biến là loại có góc bước 1,80. Nhờ có sự điều khiển cấp xung vào các đầu dây mà ta có thể điều khiển chuyển động của động cơ một cách chính xác, do đó động cơ bước được sử dụng rộng rãi trong kĩ thuật điều khiển tự động, điều khiển chính xác như chuyển động của máy gia công CNC, đầu đọc CD-ROM, máy in ...
Động cơ bước em sử dụng ở đây có số hiệu 23LM-C004, động cơ 2 pha, 6 đầu dây, dòng qui ước là 1,2A và áp cấp vào là 6V, thuộc loại động cơ biến từ trở.
Tra catalog của series này, em xác định được các đầu dây theo màu sắc như sau :
Hình 1.1 Màu sắc các đầu dây chuẩn theo Catalog
Nếu không có catalog, có thể dùng phương pháp đo điện trở kết hợp với kích dòng cho động cơ để xác định các đầu dây của động cơ bước căn cứ vào cấu tạo của các cuộn dây bên trong động cơ. Đối với động cơ bước 6 dây như trên sẽ chia làm 2 nhóm, mỗi nhóm có 3 dây trong đó có một dây chung, gọi là dây COM (common) mà điện trở của đầu dây này đối với 2 đầu dây còn lại thuộc nhóm đó sẽ bằng nhau, còn giữa các dây khác nhóm sẽ hoàn toàn cách điện. Dựa vào đó ta sẽ tìm được 2 dây COM và các dây thuộc cùng nhóm với dây COM tương ứng của động cơ bước. Vấn đề còn lại là kích dòng để tìm ra thứ tự các cuộn dây của động cơ sử dụng.
Chọn một nhóm dây, loại trừ dây COM của nhóm đó đã tìm ra bằng phương pháp đo điện trở, đặt cho 2 dây còn lại, một dây là A, một dây là B. Nối 2 dây COM chung với
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 4

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
nhau và đấu vào nguồn điện 1 chiều ở cực dương (điện áp của nguồn này trên mức định mức của động cơ một chút), kích lần lượt các cuộn còn lại vào cực âm của nguồn, bắt đầu từ cuộn A cuộn B 2 cuộn dây còn lại thuộc nhóm kia, nếu tạo ra chuyển động quay liên tục thì thứ tự 2 cuộn còn lại là C, D còn nếu có chuyển động quay ngược lại thì thứ tự 2 cuộn còn lại là D, C.
Việc diễn giải dài dòng song trên thực tế lại rất đơn giản, căn cứ vào hình vẽ sau :
Hình 1.2 Thứ tự đầu dây động cơ bước
Loại động cơ bước em dùng có các đầu dây có màu sắc được ghi ở ngoài dấu ngoặc đơn hình 1.1. Theo đó 2 đầu dây chung có màu trắng và đen. Đầu A, B, C, D theo thứ tự là lục/trắng, lục, đỏ, đỏ/trắng.
Để tạo chuyển động quay của động cơ bước, về mặt logic có 3 cách : điều khiển cả bước, điều khiển nửa bước và điều khiển vi bước. Hai cách đầu tiên chỉ cần điều khiển theo thứ tự cấp xung cho các cuộn dây, còn cách thứ ba liên quan đến thay đổi dòng điện để tạo những dịch chuyển rất nhỏ gần như vô cấp cho động cơ, khá phức tạp. Trong đồ án này em chọn hai cách đầu để thực hiện điều khiển. Đối với điều khiển cả bước và nửa bước cũng có nhiều cách cấp xung, mà tác dụng của nó chính là thay đổi momen quay của động cơ. Có thể liệt kê ra tất cả các phương án có thể dùng để điều khiển cho 4 đầu dây này như sau :
- Quay cả bước : số đầu dây được cấp xung điều khiển tuần tự như nhau theo chiều nhất định và dịch từng bước. Cụ thể :
Thuận : Nghịch :
Chế độ 1 : cấp cho từng cuộn :
Cuộn 1 : 10001000100010001000 10001000100010001000
Cuộn 2 : 01000100010001000100 00010001000100010001
Cuộn 3 : 00100010001000100010 00100010001000100010
Cuộn 4 : 00010001000100010001 01000100010001000100
Chế độ 2 : cấp xung cho 2 cuộn kế nhau :
Cuộn 1 : 11001100110011001100 11001100110011001100
Cuộn 2 : 01100110011001100110 10011001100110011001
Cuộn 3 : 00110011001100110011 00110011001100110011
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 5

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Cuộn 4 : 10011001100110011001 01100110011001100110
Chế độ 3 : cấp xung cho 3 cuộn kế nhau :
Cuộn 1 : 11101110111011101110 11101110111011101110
Cuộn 2 : 01110111011101110111 11011101110111011101
Cuộn 3 : 10111011101110111011 10111011101110111011
Cuộn 4 : 11011101110111011101 01110111011101110111
- Quay nửa bước : số đầu dây được cấp xung điều khiển tuần tự từ lẻ sang chẵn kế tiếp nhau, theo chiều nhất định và dịch từng bước. Cụ thể :
Thuận : Nghịch :
Chế độ 1 : cấp cho 1 cuộn và 2 cuộn :
Cuộn 1 : 11000001110000011100 11000001110000011100
Cuộn 2 : 01110000011100000111 00000111000001110000
Cuộn 3 : 00011100001110000011 00011100001110000011
Cuộn 4 : 00000111000001110000 01110000011100000111
Chế độ 2 : cấp cho 2 cuộn và 3 cuộn :
Cuộn 1 : 11100011111000111110 11100011111000111110
Cuộn 2 : 11111000111110001111 10001111100011111000
Cuộn 3 : 00111110001111100011 00111110001111100011
Cuộn 4 : 10001111100011111000 11111000111110001111
I.2 Giới thiệu về chuẩn giao tiếp truyền thông RS232
Trong khi làm việc với các thiết bị truyền tin, ta thường gặp các thuật ngữ DTE (Data Terminal Equipment – thiết bị đầu cuối dữ liệu) như các PC, PLC, vi điều khiển … và DCE (Data Communication Equipment – thiết bị truyền dữ liệu) như MODEM.
Để mở rộng cấu hình của máy tính cũng như tạo sự truyền thông linh hoạt giữa các máy tính với nhau, giữa các máy tính và thiết bị ngoại vi cũng như giữa các thiết bị ngoại vi với nhau, hiện nay ta có các phương thức như sử dụng rãnh cắm mở rộng trên board mạch máy tính, chuẩn giao tiếp song song (thường là cổng máy in hay cổng Centronics), chuẩn giao tiếp nối tiếp, chuẩn USB, cáp mạng …
Chuẩn giao tiếp truyền thông RS232 thuộc về loại chuẩn giao tiếp nối tiếp. Ưu điểm của chuẩn này là cáp nối có độ kháng nhiễu cao do đó có thể truyền thông trong những khoảng cách rất lớn, giá thành rẻ hơn so với cáp sóng song. Tuy nhiên tốc độ truyền dẫn thấp hơn cổng song song do khoảng thời gian giữa các bit đơn quyết định, mặt khác sự không tương thích với mức logic TTL của các mạch điện tử số cũng là một bất
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 6

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
lợi, điều này sẽ được đề cập ở bên dưới. Không được sử dụng cho những yêu cầu mang tính thời gian thực.
Chuẩn RS232 có mức điện áp như sau :
- High : -3V ÷ -12V
- Low : +3V ÷ 12V
Trong khi đó điện áp sử dụng cho các thiết bị logic trên mạch điều khiển số ngoại vi sử dụng ở mức High là 5V và mức Low là 0V. Do đó để có thể truyền dẫn thông tin từ máy tính ra thiết bị điều khiển thông qua cáp truyền theo chuẩn RS232 cần phải có các linh kiện chuyển đổi trung gian để tương thích về mức tín hiệu. Để đơn giản ta dùng chip Max232 phổ biến trên thị trường có tích hợp sẵn chức năng này.
Các cổng trên máy tính tuân theo chuẩn RS232 gồm 2 loại, loại 25 chân và loại 9 chân. Song loại 25 chân cồng kềnh và không sử dụng hết chức năng nên hiện nay ta chỉ gặp các cổng 9 chân có sẵn trên Case máy tính. Tên gọi và chức năng của các chân này như sau :
Hình 1.3 Hình dạng của cổng DB9 trên máy tính
Hình 1.4 Vị trí các chân của cổng DB9 trên máy tính
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 7

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Bảng 1.1 Bảng liệt kê tên gọi và chức năng các chân của DB9
Thứ tự Tên gọi Chức năng
1 DCD (Data Carrier Detect) DCE phát hiện sóng mang.
2 RxD (Received Data) Chân nhận dữ liệu
3 TxD (Transmitted Data) Chân truyền dữ liệu
4 DTR (Data Terminal Ready) DTE sẵn sàng làm việc
5 GND (GRounD)Nối đất tín hiệu
6 DSR (Data Set Ready) DCE sẵn sàng làm việc
7 RTS (Request To Send) DTE yêu cầu gửi dữ liệu
8 CTS (Clear To Send) DCE sẵn sàng nhận dữ liệu
9 RI (Ring Indicator) Báo chuông
I.3 Ngôn ngữ lập trình Visual Basic
Là ngôn ngữ cấp cao 32 bit dùng để viết các chương trình cấp cao chạy trong Windows, giao diện thân thiện với người dùng, có chứa các chức năng thiết kế giao diện dễ dàng, hướng đối tượng đồng thời có điều khiển MSCOMM được hỗ trợ sẵn cho việc truyền tín hiệu qua cổng COM. Ngôn ngữ này sẽ được giới thiệu kĩ hơn khi thiết kế phần mềm.
I.4 Giới thiệu chip P89V51RB2
Thuộc họ vi điều khiển MCU51 của Philips, với các đặc trưng đáng quan tâm :
- 16KB ROM- 128 byte RAM- 4 port xuất nhập 8 bit- 3 bộ timer- Mạch giao tiếp nối tiếp- Bộ xử lí bit- Có khả năng điều xung- Chức năng bộ định thời chó canh (Watch Dog Timer)
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 8

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
I.5 Nội dung của đồ án
Thực hiện việc giao tiếp truyền thông giữa PC và chip vi điều khiển P89V51RD2 qua chuẩn truyền thông RS232 với IC chuyên dụng để tương thích điện áp sử dụng nhằm điều khiển động cơ bước 6 dây 2 pha. Các bước tiến hành :
- Thiết kế mạch điều khiển động cơ, mạch công suất, mạch giao tiếp
- Thiết kế giao diện phần mềm trên máy tính bằng VB6.0 với MSCOMM để điều khiển cổng COM trên máy
- Thực hiện giao tiếp giữa PC và vi điều khiển ngay trên đường nạp chip
- Chọn chế độ, chiều quay trên máy tính và xuất ra chuyển động quay của động cơ đúng theo ý muốn
- Sau khi động cơ dừng, hiển thị thông báo trên màn hình máy tính
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 9

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Chương 2
THIẾT KẾ PHẦN CỨNG
Phần cứng được thiết kế theo từng module riêng biệt để dễ kiểm tra, bảo trì, nâng cấp từng phần, phù hợp chức năng chuyên biệt hóa sản phẩm hiện nay. 3 module chính là : module giao tiếp, module điều khiển và module công suất. Phần này sẽ nghiên cứu cấu tạo và chức năng của các linh kiện có trong module, công năng chung của module và tính toán thiết kế một sản phẩm hoàn chỉnh trên cơ sở các module rời rạc trên.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 10

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Hình 2.1 Sơ đồ các khối chức năng
Giải thích các khối chức năng :
- Phần mạch giao tiếp : gồm linh kiện chính là cổng COM DB9 với IC MAX232 để thực hiện chuyển đổi tương thích điện áp giữa cổng COM trên máy tính và điện áp tín hiệu trên mạch điều khiển. Làm nhiệm vụ giao tiếp giữa máy tính và vi điều khiển.
- Phần mạch điều khiển chính : gồm IC P89V51RB2 với các linh kiện phụ khác như bộ tạo dao động ngoài là thạch anh tần số 11.0592MHz, nút Reset và các tụ, trở để thực hiện chức năng điều khiển.
- Phần mạch nguồn : gồm 2 cấp điện áp : nguồn cho vi điều khiển dùng ở mức 5V và nguồn cho thiết bị ngoại vi ở mức 9V, để an toàn dùng hai nguồn riêng và cách li chúng. Nguồn cho vi điều khiển cần có mạch riêng để đưa từ mức 12V về 5V.
- Phần mạch công suất : trực tiếp điều khiển các cuộn dây động cơ, gồm các transistor, linh kiện cách li quang là OPTO PC817, mạch đẩy kéo Darlington gồm cặp BJT bổ phụ 2SD468 và 2SB562, transistor trường chịu dòng ngược cao là FET IRF540.
Trong khi thi công mạch, em đã tách riêng các phần mạch để dễ kiểm tra và bảo đảm an toàn.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 11
MẠCH NGUỒN KHỐI ĐIỀUKHIỂN
CHÍNH
MẠCH GIAO TIẾP
MẠCH CÔNG SUẤT
PC
THIẾT BỊ NGOẠI VI

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
II.1 Phần mạch giao tiếpV C C _ A R R O W
G N D
V c c
G N D
G N DG N D
R x DT x DG N DV c c
T x D
R x D
G N D
U 1
M A X 2 3 2
1
2
3
4
5
6
7
89
1 01 1
1 2 1 3
1 4
1516
C 1 + V+
C 1 -
C 2 +
C 2 -
V -
T 2 O U T
R 2 I NR 2 O U T
T 2 I NT 1 I N
R 1 O U TR 1 I N
T 1 O U T
GN
DVC
C
C 1
1 n1
2
C 2
1 n1
2
C 3
1 n
12
C 4
1 n
12
C 5
1 n
1 2
P 1
C O N N E C T O R D B 9
594837261
R 1
1 k
2 1
D 1
L E D
J P 1
4 H E A D E R
1234
Hình 2.2 Module giao tiếp
<chú ý : các tụ phân cực, thông số tra theo datasheet>
Vi mạch MAX232 với sơ đồ kết nối chân với DB9 và vi điều khiển giống như trong datasheet đi kèm. Led điểm và R8 chỉ để kiểm tra điện áp ngoài cấp vào cho MAX232.
II.2 Phần mạch điều khiển chính :
Thành phần chính là chip P89V51RB2 của Philips. Với mục đích mở rộng thêm các chức năng sau này, nên các cổng P0, P1, P2 được đưa đến các Jumper 10 chân, trong đó 8 chân là dành cho các đường tín hiệu từ các cổng, 1 chân nguồn và 1 chân nối đất.
Bộ tạo dao động ngoài của chip vi điều khiển là thạch anh tần số 11,0592MHz.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 12

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Hình 2.3 Module điều khiển
II.3 Phần mạch nguồn
Nguồn sử dụng trong đồ án gồm 2 cấp điện áp : Nguồn 5V cấp cho vi điều khiển và nguồn 9V cấp cho động cơ. Để có thể tận dụng ngay nguồn điện năng xoay chiều có sẵn, em thiết kế ra 2 mạch chỉnh lưu kết hợp với ổn áp riêng lẻ để cấp cho mạch 9V và adapter dòng 15mA để cấp cho mạch điều khiển.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 13

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Hình 2.4 Nguồn 5V
Các linh kiện trong mạch :
D1, C10 : diode loại 5A và tụ 1000u tạo thành mạch xén xung âm đưa vào ổn áp.
U18 : IC ổn áp 7812, 7805 là thành phần chính tạo điện áp đầu ra 5V để cấp cho vi điều khiển và 9V để cấp cho động cơ
C11, C12 : tụ hóa 104, làm nhiệm vụ lọc tín hiệu dương ở tần số cao
C10, C13 : lọc tín hiệu dương ở đầu vào và đầu ra của 7805
Q2 : Transistor loại B688 hoặc B633 làm nhiệm vụ đệm dòng
R7, D2 : led điểm để phát hiện nguồn đã được cấp và đạt đến 5V hay chưa, còn R7 là để tạo điện áp rơi đủ để D2 sáng mà không bị cháy. Giá trị R7 được tính như sau :
( )Ω=−=−
= 215mA20
V7,0V5
I
VV57R
led
led chọn R7 = 330 (Ω )
Phần mạch nguồn này được tích hợp luôn trên mạch điều khiển.
II.4 Phần mạch công suất :
Động cơ bước sử dụng thuộc loại 2 pha, 6 dây, số hiệu 23LM-C004 với các thông số cho trước như sau :
- Dòng điều khiển : Iđm = 1,2A
- Áp điều khiển : Uđm = 6V
- Bước quay : 1,80
- Số bước quay 1 vòng : 200 bước
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 14

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Với các đặc điểm của động cơ như trên, việc kích dòng cho động cơ trực tiếp từ vi điều khiển là không thể thực hiện được. Có các cách giải quyết vấn đề này như sau :
- Sử dụng IC họ ULN, UCN như ULN2003, ULN2803, UCN5803, UCN5804 … để tăng dòng. 1 ưu điểm nữa của các IC này là có diode bảo vệ bên trong chống lại dòng ngược từ động cơ xuất hiện khi hãm
- Sử dụng linh kiện rời với các BJT và FET IRF làm nhiệm vụ tăng dòng dẫn ra các cuộn dây
- Sử dụng vi mạch chuyên dụng điều khiển động cơ 2 pha là cặp L297, L298 với cách mắc được cho sẵn trong datashet của sản phẩm.
Xét về sự phù hợp với đặc điểm của động cơ là dòng kích lớn, họ ULN không đáp ứng được, cùng với sự phù hợp về kinh tế, em lựa chọn cách thứ hai. Mạch công suất thiết kế gồm 8 khối công suất giống hệt để có thể điều khiển được 2 động cơ, phục vụ mục đích mở rộng sau này. Ở hình bên dưới chỉ trích ra một khối. Để bảo đảm an toàn, ở đầu vào mạch này lắp cách li quang.
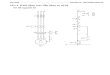
Hình 2.5 Mạch công suất
Trong đó dk5 dẫn trực tiếp từ đầu ra của chân vi điều khiển, VCC là nguồn của vi điều khiển, nguồn 12V là trên lí thuyết, thực tế có thể thay đổi chút ít nằm trong giới hạn cho phép của động cơ sử dụng, ở đây em dùng nguồn 9V. coin5 nối ra dây động cơ bước, còn ISO5 là linh kiện OPTO PC817.
Khi có điện áp kích (ở mức 0) đưa vào dk5, ISO 5 dẫn. Cụm D468, B568 làm nhiệm vụ đẩy kéo và khuếch đại dòng đưa vào chân G của FET. Điện trở R14 dùng để phân cực cho Q14, Q15. Điện trở R15 dùng để phân cực cho FET đồng thời tăng hệ số khuếch đại dòng của FET. R29 là điện trở hạn dòng bảo vệ OPTO. Trong cùng một thời
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 15

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
điểm sẽ có một hoặc nhiều đầu dây được kích để tạo ra chuyển động quay của động cơ bước.
Giá trị của các điện trở được tính như sau :
( )Ω=−=−
= 225mA20
V5,0V5
I
VV
ak
akcc29R chọn R29 = 560 (Ω )
Ω=−=−
= K8,11mA1
V2,0V12
I
VV12R
ces
ces14 chọn R14 = 10 (kΩ )
mA80mA180III ces14Q/eg =×=β==
Sơ đồ tương đương của tầng ra (chứa FET) :
I g G
S
D
I d c
R 1 5R
R g s4 . 7
R d c4
U 1
g m V g s
12
12
Dòng vào : Ig = 80 mA
Dòng ra định mức : Idcdm = 1,5 A
Chọn dòng cho động cơ bằng 5 lần dòng định mức, khi đó Idc = 7,5 A
Hệ số khuếch đại dòng :
75,93mA80
A5,7
I
IA
g
dcdmi ===
Mặt khác :
( )7,4R
7,4R20R//Rg
R//R
V
VgA
15
15gs15m
gs15
gs
gsmi +
××===
75,93
1
7,4
1
R
1
20
1
15
=
+
R15 = 878,9 (Ω )
Chọn R15 thấp xuống để giảm hệ số khuếch đại dòng, chọn R15 = 390 Ω
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 16

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Chương III
THIẾT KẾ PHẦN MỀM
Phần mềm được thiết kế gồm 2 phần :
- Phần thiết kế giao diện giao tiếp với chip ngoại vi (P89V51RB2) trên máy tính ;
- Phần lập trình trên vi điều khiển để giao tiếp với máy tính và điều khiển động cơ bước.
III.1 Thiết kế giao diện phần mềm trên máy tính
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 17

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
III.1.1 Những vấn đề chung nhất về Visual Basic
- Visual Basic hỗ trợ đồ họa mạnh, nên có thể dễ dàng thiết kế giao diện theo ý muốn.
- Ngôn ngữ Visual Basic là ngôn ngữ cấp cao, hướng đối tượng nên dễ dàng lập trình xử lí trên từng đối tượng, tạo sự đóng gói dữ liệu, dễ kiểm tra và phát triển theo ý muốn.
- Khi thiết kế giao diện trên phần mềm, ta có thể sử dụng các đối tượng hỗ trợ sẵn có thể tìm thấy ở bên trái cửa sổ phần mềm khi khởi động Visual Basic hoặc gọi ra từ nút Toolbox ở thanh công cụ phía trên màn hình. Ngoài các đối tượng trên, Visual Basic còn hỗ trợ thêm các điều khiển mạnh và chuyên biệt, được gọi từ Project Component. Trong đó, điều khiển MS_COMM là điều khiển được hỗ trợ sẵn cho cổng nối tiếp. Ngoài ra cũng có thể điều khiển bằng cách lập trình trên thư viện liên kết động ở dạng file .dll tuy nhiên ở mức độ không chuyên em chọn cách dùng điều khiển MS_COMM cho đồ án của mình.
III.1.2 Bản chất của việc thu nhận dữ liệu qua cổng COM
Khi thu dữ liệu bằng cổng COM, giá trị sẽ truyền trên qua chân RxD và đưa vào chip UART (Universal Asynchronous Receiver/Transmitter : mạch thu phát không đồng bộ vạn năng) kết nối trực tiếp với cổng COM trên máy tính. Một số loại chip UART được sử dụng trên các máy tính là 8250, 16450, 16550. Bên trong chip UART có 1 thanh ghi đệm thu, chính là nơi lưu giữ các dữ liệu tạm thời được nhập qua cổng COM, và 1 thanh ghi đệm phát lưu giữ dữ liệu chờ được xuất ra khỏi cổng. Khi phát dữ liệu, giá trị người dùng đưa vào máy sẽ đưa vào bộ đệm phát và xuất ra chân TxD đưa đến thiết bị ngoại vi.
Mỗi lần thu và phát dữ liệu trên cổng COM sẽ gây ra một ngắt trên chip UART.
Em không đi sâu vào cấu tạo bên trong của vi mạch UART vì đồ án của em chỉ quan tâm đến phương thức gửi và nhận tín hiệu qua cổng, còn việc xử lí tín hiệu bên trong chip UART đã được nhà sản xuất đảm nhận.
III.1.3 Nghiên cứu các thuộc tính của điều khiển MS_COMM
- Settings :
Cú pháp : MSCOMMx.Settings = “bps,p,d,s”
Trong đó : x : số thứ tự của điều khiển MS_COMM ta đang sử dụng.
bps: tốc độ truyền dữ liệu của cổng nối tiếp (bit/giây)
p : kiểm tra chẵn lẻ. Giá trị của nó là O (kiểm tra lẻ), E (kiểm tra chẵn), N (không kiểm tra chẵn lẻ).
d : số bit dữ liệu
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 18

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
s : số bit stop
Các thông số được lấy tương ứng với cổng RS232 của người dùng.
Như hình bên dưới là thông số cổng COM trên máy tính của em. Như vậy khai báo thuộc tính Settings sẽ là :
MSCOMM1.Settings = “9600,N,8,1”
Hình 3.1 Cách xác định thuộc tính cổng COM trên máy tính
Kiểm tra thuộc tính này trên điều khiển MSCOMM :
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 19

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Hình 3.2 Thuộc tính cổng COM trên MSCOMM hỗ trợ sẵn
- CommPort :
Cú pháp : MSCOMMx.Commport = y
Với y là số thứ tự của cổng COM ta sử dụng. Như hình trên, cổng COM của ta có số thứ tự là 1. Như vậy khai báo Commport là :
MSCOMM1.CommPort = 1
- PortOpen :
Cú pháp : MSCOMMx.PortOpen = Boolean
Với Boolean là True (buộc mở Port) và False (buộc đóng Port).
3 thuộc tính nêu trên bắt buộc khai báo khi muốn sử dụng cổng COM cho ứng dụng của mình.
- Các thuộc tính nhận dữ liệu :
Input : nhận 1 chuỗi kí tự và xóa khỏi bộ đệm
InBufferCount : số kí tự có trong bộ đệm nhận
InBufferSize : đặt và xác định kích thước bộ đệm nhận, tính bằng Byte
- Các thuộc tính xuất dữ liệu : tương tự như nhập dữ liệu, bao gồm thuộc tính Output, OutBufferCount, OutBufferSize
- CDTimeout, DSRTimeOut, CTSHolding, DSRHolding, CDHolding : do đồ án không có giao tiếp với thiết bị trung gian như Modem nên các thuộc tính này ta không quan tâm đến.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 20

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
- DTREnable : thông báo sự tồn tại của DTE, nhận kiểu Boolean.
- RTSEnable : xóa tín hiệu RTS để yêu cầu truyền dữ liệu đến DTE.
- NullDiscard : cho phép nhận kí tự rỗng hay không.
- RThreshold, SThreshold : số byte trong bộ đệm nhận, bộ đệm phát làm phát sinh sự kiện OnComm.
- HandShaking : chọn giao thức bắt tay khi truyền dữ liệu. Đối với đồ án của em không sử dụng giao thức này nên cũng không cần nghiên cứu sâu ở đây.
- CommEvent : trả lại các lỗi truyền thông hay các sự kiện xảy ra trên cổng nối tiếp.
* Sự kiện OnComm : là sự kiện xảy ra khi có thay đổi giá trị của các thuộc tính trong CommEvent.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 21

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
III.1.4 Thiết kế giao diện
Hình 3.3 Giao diện chính của phần mềm
Giải thích giao diện :
- Trước khi vào giao diện chính, người dùng có thể xem qua các hướng dẫn trong menu Hướng dẫn để thực hiện các thao tác kết nối phần cứng và các bước tiến hành thao tác trên phần mềm.
- Trong giao diện chính người dùng sẽ chọn lần lượt theo thứ tự các bước. Nút Cancel dùng để tắt giao diện. Nút Stop làm việc ở hai chế độ, ở chế độ kiểm tra cổng sẽ làm việc như nút OK dùng để chấp nhận chuỗi kí tự gửi từ khung kí tự nhận, còn ở chế độ quay động cơ sẽ dùng để dừng động cơ. Khi khởi động giao diện, frame Kiểm tra frame Chế độ quay sẽ không hiển thị, chỉ khi người dùng chọn 1 trong hai chế độ Kiểm tra cổng hoặc Ngoại vi thì frame tương ứng mới cho phép nhìn thấy.
+ Bước 1 : chứa các thao tác để chọn cổng và tốc độ baud tuân theo thuộc tính của nó trên máy tính của người dùng.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 22

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
+ Bước 2 : chứa 2 tùy chọn :
* Ngoại vi : là để chọn các chế độ điều khiển trực tiếp thiết bị ngoại vi từ máy tính. Nếu chọn tùy chọn này thì các chế độ trong frame Chế độ quay sẽ cho phép chọn, còn nếu chọn tùy chọn Kiểm tra cổng thì
* Kiểm tra cổng : để test cổng DB9. Có thể test riêng cổng trên máy tính của mình bằng cách nối 2 chân thứ 2 (RxD) và thứ 3 (TxD) của cổng với nhau, hoặc kết nối 2 máy tính với sơ đồ kết nối các chân như sau :
Hình 3.2 Ghép nối truyền thông của chuẩn giao tiếp nối tiếp
Khi đó frame Kiểm tra mới hiển thị lên, cho phép gõ vào khung Kí tự phát, khi nhấn OK hoặc Enter thì dãy kí tự sẽ xuất hiện ở khung Kí tự nhận. Trường hợp cổng bị hư hỏng, hoặc kết nối dây không đúng thì khung Kí tự nhận không hiển thị gì. Sau khi kiểm tra xong, nếu ta muốn thực hiện chọn chế độ điều khiển cho thiết bị ngoại vi, cần chọn lại tùy chọn Ngoại vi ở trên, khi đó frame Kiểm tra bị ẩn đi. Việc làm ẩn đi hoặc hiển thị frame các frame chỉ có tác dụng làm giao diện rõ ràng và thẩm mĩ hơn, không ảnh hưởng đến thuật toán chương trình.
- menu Giới thiệu là một phần phụ đi theo, giới thiệu về đề tài, tác giả và lời cảm ơn.
III.1.5 Lập trình trên nền Visual Basic
Lập trình theo lưu đồ thuật toán sau :
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 23

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
`
Hình 3.4 Lưu đồ thuật toán việc gửi và xử lí dữ liệu từ PC trên VB6.0
III.2 Thiết kế phần mềm trên chip P89V51RB2
III.2.1 Điều khiển thu phát dữ liệu
Đối với các chip vi điều khiển hiện nay, việc thu phát dữ liệu có thể thực hiện được nhờ một chip UART tích hợp bên trong qua hai đường truyền thông nối tiếp là TxD và RxD trên vi điều khiển. Thường hai đường này nằm trùng với 2 chân làm nhiệm vụ xuất/nhập dữ liệu thông thường, chỉ được sử dụng trong trường hợp truyền nhận nối tiếp
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 24
Đ
S
Chế độ test cổng
START
- Chọn cổng COM- Chọn tốc độ baud
Hiển thị gửi và nhận chuỗi kí tự trên màn hình
Chọn chế độ quay và gửi ra cổng COM
Dừng động cơ
Hiển thị thông báo dừng trên màn hình máy
tính
END
Đ
S
Chế độ quay động cơ
Đ

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
khi được set chế độ thích hợp bằng phần mềm. Việc thu phát dữ liệu của vi điều khiển theo 2 phương thức :
a) Thăm dò : đối với việc thu dữ liệu, vi điều khiển không làm gì cả, chỉ chờ việc dữ liệu gửi đến bộ đệm thu, thực thi nhiệm vụ tương ứng với dữ liệu đó – cũng chính là lệnh điều khiển được gửi đến vi điều khiển từ DTE phát. Đối với việc phát dữ liệu, vi điều khiển chờ dữ liệu được đưa vào bộ đệm phát và phát tín hiệu sẵn sàng cho việc gửi dữ liệu. Sau khi thực thi chương trình tương ứng, vi điều khiển lại quay về chờ dữ liệu được đưa vào bộ đệm để chuyển đến chương trình kế tiếp. Việc này tuy thực hiện đơn giản nhưng lại mất thời gian trong việc chờ đợi dữ liệu. Đối với phương thức này, đối với 8051, người ta sử dụng thanh ghi SCON chuyên dụng cho việc truyền thông nối tiếp trong vi điều khiển. Cấu tạo của nó như sau :
Các bit chức năng trên thanh ghi SCON :
Trong đó :
Bit 7, 6 : các bit chọn chế độ được cho bởi bảng sau :
Chế độ 0 : port nối tiếp làm việc ở chế độ thanh ghi dịch 8 bit. Dữ liệu nối tiếp được thu và phát thông qua chân RxD, còn chân TxD xuất xung clock dịch bit. Tốc độ baud cố định = 1/12 tần số của dao động nội trong chip.
Chế độ 1, 2, 3 : port nối tiếp làm việc ở chế độ UART như mô tả ở trên. 2 chân RxD và TxD theo đúng chức năng Thu/ Phát như tên của nó. Chữ “x” trong tên của 2 chân này để nhấn mạnh rằng 2 thiết bị đầu cuối kết nối theo kiểu nối tiếp có thể làm việc bắt tay, nghĩa là có thể đồng thời phát và thu trên 2 đường dữ liệu riêng biệt.
Bit 5 : cho phép truyền thông đa xử lí làm việc ở các chế độ 2 và 3. Do trong đồ án không yêu cầu truyền thông theo kiểu này, do đó ta không nghiên cứu sâu vào.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 25

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Bit 4 : cho phép thu. Thường được set lên từ đầu để cho phép thu dữ liệu ngay khi cấp nguồn và kết nối với máy tính.
Bit 3, 2 : chỉ sử dụng trong chế độ 2 và 3, là bit thứ 9 được truyền đi hoặc nhận về trong 2 chế độ này tùy thuộc vào việc nhận hay phát tín hiệu của vi điều khiển.
Bit 1 : cờ ngắt phát. Được set khi kết thúc việc thu kí tự, xóa bởi phần mềm.
Bit 0 : cờ ngắt thu. Thường set ở đầu chương trình để báo bộ đệm rỗng, cho phép nhận tín hiệu ngay khi cấp nguồn và kết nối với máy tính. Được xóa bởi phần mềm.
b) Ngắt nối tiếp :
Phương thức này khắc phục được nhược điểm của phương thức thăm dò nêu trên, đó là loại bỏ thời gian vô ích trong việc chờ dữ liệu được đưa đến bộ đệm thu/phát. Trong khi chương trình chính của ta đang thực thi, thì một ngắt thu/phát do dữ liệu được đưa đến bộ đệm ở trạng thái sẵn sàng cho việc thực thi chương trình ngắt nối tiếp xảy ra, chương trình nhảy đến chương trình ngắt tương ứng để thực hiện, xong đâu đấy nó lại quay về điểm bị ngắt và thực thi tiếp.
Trong 8051 có thanh ghi điều khiển ngắt IE, sẽ điều khiển được 5 ngắt tương ứng, đó là 2 ngắt do bộ định thời, 2 ngắt ngoài, 1 ngắt nối tiếp. Riêng đối với một số loại chip của Philips như P89V51RB2, P89V51RD2 … hoặc chip AT89Sxx, AT89C52 của Atmel có thêm 1 ngắt do bộ định thời thứ 3. Trong phạm vi nghiên cứu của đồ án này em chỉ đưa ra những thuộc tính của ngắt do port nối tiếp.
Để khai báo việc sử dụng ngắt nối tiếp, ta set bit EA là bit thứ 7 của thanh ghi IE để cho phép ngắt, và bit ES là bit thứ 4 của thanh ghi IE cho phép ngắt nối tiếp.
Khi xảy ra một ngắt (thu hoặc phát) cờ ngắt RI hoặc TI được set lên, chương trình nhảy đến ngắt thích hợp và thực thi nó. Vì cờ nhớ không tự xóa nên người lập trình phải xóa bằng thuật toán trên vi điều khiển để chương trình có thể thực hiện các ngắt tiếp theo.
Đối với cả hai phương thức nói trên, để thực hiện được cần phải tạo ra một tốc độ baud thích hợp để việc truyền thông nối tiếp có thể xảy ra. Tốc độ baud này được tạo bởi tốc độ tràn của bộ định thời trên chip vi điều khiển, do đó một bộ định thời sẽ được sử dụng trong nhiệm vụ này.
Tốc độ baud = tốc độ tràn bộ định thời / 32
Vậy nếu ta cần tốc độ baud 9600 thì tốc độ tràn bộ định thời là 307,2KHz.
Tần số của thạch anh là 11,0592MHz, bộ định thời tạo tốc độ baud được cấp xung clock là 0,9216 MHz = 921,6KHz, việc tràn này cần phải xảy ra sau mỗi 921,6/307,2 = 3 xung. Do bộ định thời đếm lên nên giá trị nạp lại cho bộ định thời phải là -3 hay 0FDh.
Để có sự đồng bộ hóa giữa việc gửi tín hiệu từ máy tính và nhận tín hiệu đưa vào chip cần phải tuân theo đúng loại dữ liệu được đưa từ máy tính, ví dụ dữ liệu gửi đến ở dạng số nhị phân thì dữ liệu xử lí trên chip cũng phải ở dạng số nhị phân, còn ở dạng kí tự thì dữ liệu xử lí trên chip cũng phải ở dạng kí tự.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 26

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Lưu ý : trong chương trình thuộc nội dung đồ án, dữ liệu được xuất ra ở cổng COM ở dạng kí tự và dữ liệu nhận vào chip cũng ở dạng kí tự, nên để đồng bộ hóa việc thu phát dữ liệu và dễ dàng trong việc lập trình, em sử dụng các kí tự theo thứ tự tùy chọn trên giao diện thiết kế để gửi và nhận tín hiệu trên cả VB lẫn chip, đó là :
“1” : Chế độ 1 - quay thuận cả bước
“2” : Chế độ 2 - quay nghịch cả bước
“3” : Chế độ 3 - quay thuận nửa bước
“4” : Chế độ 4 - quay nghịch nửa bước
Để thực hiện việc thu và phát tín hiệu giao tiếp giữa vi điều khiển, em sử dụng ngắt nối tiếp của vi điều khiển P89V51RB2.
Chương trình xử lí dữ liệu từ máy tính được cụ thể hóa trên lưu đồ thuật toán sau :
Hình 3.5 Lưu đồ thuật toán xử lí dữ liệu trên P89V51RB2
<bị sai chỗ chờ ngắt : nhảy đến trình phục vụ ngắt, trong trình phục vụ ngắt mới so sánh>
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 27
MAIN
Các khai báoKhởi tạoChờ ngắt
Chế độ 1 ?
QUAY THUẬN CẢ BƯỚC
S
Đ
Chế độ 2 ?
QUAY NGHỊCH CẢ BƯỚC
Chế độ 3 ?
QUAY THUẬN NỬA BƯỚC
Chế độ 4 ?
QUAY NGHỊCH NỬA BƯỚC
Đ
S
Đ
S
Đ
S

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
III.2.2 Điều khiển động cơ bước
Để điều khiển động cơ, em đưa ra các chế độ cấp tín hiệu điều khiển cho các đầu dây theo kiểu đơn cực phụ thuộc vào đầu dây được cấp tín hiệu. Đối với động cơ bước có 4 đầu dây thì số lượng đầu được cấp tín hiệu cho 1 lần dịch bước tối đa là 3. Việc này trong các ứng dụng thực tế cần điều khiển nhiều thiết bị khác nhau sẽ gây nên lãng phí chân, tuy nhiên trong một ứng dụng nhỏ thuộc nội dung đồ án này thì nó sẽ đơn giản hơn cho việc điều khiển và cũng không bị giới hạn về số lượng chân nên em chọn cách điều khiển đơn cực để tạo chuyển động quay của động cơ bước.
Lưu đồ thuật toán của các chế độ quay :
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 28
QUAY THUẬN CẢ BƯỚC
P2 A
R6 = 25
R4 = 0
R6 = 0 ?
Đ
RETI
S
Đ
S
DELAY
DELAY
Quay phải A
Giảm R4
Giảm R6
R4 = 4
QUAY NGHỊCH CẢ BƯỚC
P2 A
R6 = 25
R4 = 0
R6 = 0 ?
Đ
RETI
S
Đ
S
DELAY
DELAY
Quay trái A
Giảm R4
Giảm R6
R4 = 4
A = 01111111B A = 11101111B

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Hình 3.6 Lưu đồ thuật toán thu nhận dữ liệu điều khiển động cơ bước
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 29
QUAY THUẬN NỬA BƯỚC
R6 = 25
R6 = 0 ?
RETI
S
Đ
DELAY
P2=01111111B
P2=00111111B
P2=10111111B
P2=10011111B
P2=11011111B
P2=11001111B
P2=11101111B
P2=01101111B
DELAY
DELAY
DELAY
DELAY
DELAY
DELAY
DELAY
Giảm R6
QUAY NGHỊCH NỬA BƯỚC
R6 = 25
R6 = 0 ?
RETI
S
Đ
DELAY
P2=11101111B
P2=11001111B
P2=11011111B
P2=10011111B
P2=10111111B
P2=00111111B
P2=01111111B
P2=01101111B
DELAY
DELAY
DELAY
DELAY
DELAY
DELAY
DELAY
Giảm R6

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
Chương IV
MỞ RỘNG ĐỒ ÁN
Phần này nêu lên các ưu nhược điểm trong các bước xây dựng phần cứng, phần mềm của đồ án, những ứng dụng thực tiễn của sản phẩm và mở rộng đồ án cho các ứng dụng nâng cao hơn để hoàn chỉnh chức năng của một sản phẩm có tính ứng dụng thực tiễn cao.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 30

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
IV.1 Ưu điểm của đồ án
- Về thiết kế phần mềm : Đơn giản, dễ sử dụng. Đã thực hiện được ý đồ ban đầu là giao tiếp được giữa PC – vi điều khiển – ngoại vi. Có khả năng mở rộng các ứng dụng khác một cách dễ dàng.
- Về thiết kế phần cứng : Phần mạch thiết kế riêng từng module nên tiện cho việc kiểm tra, thay thế cũng như mở rộng các chức năng khác như hiển thị led, hiển thị LCD, nhận tín hiệu từ cảm biến ngoài cũng như điều khiển được nhiều động cơ DC và động cơ bước khác. Từng module nhỏ gọn phù hợp với các yêu cầu chuyên môn hóa, nhờ đó có thể dễ dàng nâng cấp theo yêu cầu của người dùng.
IV.2 Nhược điểm của đồ án
- Về thiết kế phần mềm : Chuyển đổi tốc độ chưa mịn do trình phục vụ ngắt nối tiếp không thể thực hiện một ngắt khi đang thực hiện 1 chương trình ngắt nối tiếp trước đó.
- Về thiết kế phần cứng : Chưa thực hiện được nhúng các ứng dụng về mặt phần cứng. Như đã nói, mạch điều khiển được đưa ra với mục đích mở rộng các chức năng để điều khiển được nhiều thiết bị ngoại vi khác, tuy nhiên đồng thời với ưu điểm này thì việc tách rời các thành phần sẽ khiến mạch cồng kềnh hơn.
IV.3 Ứng dụng thực tiễn
Nhờ thay đổi linh hoạt chuyển động của động cơ từ máy tính nên người dùng có thể dễ dàng điều khiển nó hoạt động theo những quĩ đạo nhất định hoặc thay đổi với chu trình vận tốc phù hợp với yêu cầu của mình. Đây là cơ sở để xây dựng nên những máy vẽ điện tử, điều khiển hoạt động của robot công nghiệp hay một dây chuyền sản xuất bất kì theo một chu trình định sẵn hay được tùy biến bởi người dùng. Các chức năng mở rộng của nó có thể làm cho hoạt động lao động sản xuất của con người được cải tiến rất nhiều về thời gian và kinh phí, nâng cao năng suất lao động, đem lại hiệu quả cao, giảm giá thành các sản phẩm.
IV.4 Mở rộng chức năng
Do trình độ cũng như thời gian có hạn nên đồ án của em chỉ giới hạn ở việc điều khiển chế độ, chiều quay của động cơ ở 2 chế độ : cả bước và nửa bước, thông qua cổng COM. Từ những kiến thức có được trong quá trình nghiên cứu các tài liệu để thực hiện đồ án này, có thể nâng cao thêm để ứng dụng gần gũi hơn với thực tế như sau :
- Điều khiển động cơ ở chế độ vi bước
- Điều khiển thông qua cổng USB
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 31

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
- Chuyển đổi chế độ quay ngay trong quá trình động cơ quay, thay đổi tốc độ quay
- Ứng dụng cho việc điều khiển tuần tự trong một dây chuyền sản xuất, chẳng hạn như dây chuyền cấp phôi tự động, dây chuyền lắp ráp các thiết bị sử dụng trong các nhà máy …
- Điều khiển chính xác tọa độ dựa trên các chuyển động của động cơ bước. Có thể ứng dụng trong các máy vẽ, điện tâm đồ, điện não đồ hoặc chuyển động các trục trong máy CNC. Nhờ có giao diện với máy tính nên việc điều khiển sẽ trở nên trực quan hơn.
- Mở rộng giao tiếp truyền thông đa xử lí để giao tiếp giữa các máy tính trong mạng cục bộ nhà máy, cơ sở sản xuất nhằm tối ưu hóa thời gian và khắc phục trở ngại của không gian.
- Kết hợp giữa mô phỏng trên phần mềm với điều khiển thực tế để tối ưu quá trình thiết kế robot, giúp rút ngắn con đường giữa lí thuyết và thực nghiệm.
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 32

Lập trình điều khiển động cơ bước từ máy tính qua cổng nối tiếp dùng VĐK
8051
TÀI LIỆU THAM KHẢO :
Ninh Đức HùngTự học thiết kế hệ thống vi điều khiển với họ 8051 trong 10 tiếngNXB văn hóa thông tinHà Nội, 2007 Nguyễn Mạnh GiangCấu trúc – Lập trình – Ghép nối và ứng dụng vi điều khiển, tập 2NXB Giáo dụcHà Nội, 2007 Tống Văn On, Hoàng Đức HảiHọ vi điều khiển 8051NXB lao động – xã hộiTP HCM, 2001 Nguyễn Quang Hùng, Trần Ngọc BìnhĐộng cơ bước – Kĩ thuật điều khiển và ứng dụngNXB KHKTHà Nội, 2003 Douglas W.Jones (Đoàn Hiệp dịch)Điều khiển động cơ bướcTài liệu mạng Hoàng Minh SơnMạng truyền thông công nghiệpNXB KHKTHà Nội, 2007Phạm Huỳnh Kim KhánhTài liệu lập trình hệ thốngEbook Hồ Thanh Tâm, Lê Văn BạnLập trình giao tiếp máy tính bằng Visual BasicEbookNgô Diên TậpĐo lường và điều khiển bằng máy tínhNXB Khoa học kĩ thuậtHà Nội, 2004 Nguyễn Văn Minh Trí, Lâm Tăng ĐứcGhép nối và điều khiển thiết bị ngoại viEbook
SVTH : Châu Thị Ngọc An – Lớp 05CDT1 Trang 33