Embed Size (px)
Citation preview

June 20–23, 2016 | Berlin, Germany

Die Pacman Nomaden
Howard Huang, HuaweiLingli Deng, China Mobile

Outline
❏ Motivation❏ Interesting Use Cases❏ OPNFV Requirements❏ Nomad Introduction❏ Future Plan

Motivation - Why ?
OpenStack currently lacks of a set of features in respect to portable hardware acceleration*:• Accelerators life management• Accelerators resource discovery• Reconfigurable FPGA, GPUs and other accelerators
migration support, ease of use, etc.
* these features have been highlighted in the OPNFV OpenStack GAP Analysis document.

Motivation - What ?Very Close - in the cpu chipset or on the board (i.e., see Intel’s skylake staging)
• Suitable for offload model, and inline if associated interface is also in place
• With optimal sharing of resources can provide excellent processing gains
• Limited by horizontal scale, but can be leveraged as a unit of management like the associated CPU
Nearby - attached via a bus or similar (i.e., PCIe or within a chassis assembly)
• Suitable for offload and inline models
• Susceptible to negative impact if interface across the bus is chatty
• Larger scale possible, particularly in chassis configurations
Far - reachable by TCP/IP or other communication protocol
• Suitable for offload and inline if latency is not a concern
• Largest horizontal scale flexibility
• Much more suited to a standalone function model
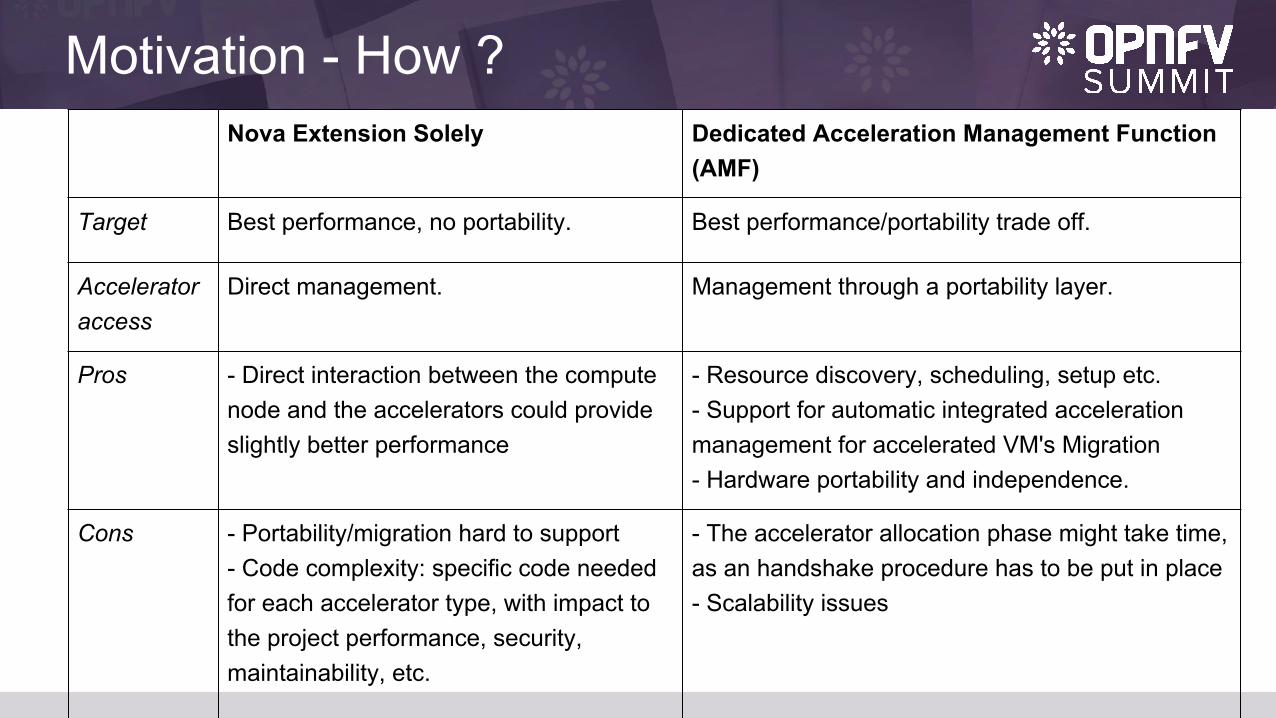
Motivation - How ?Nova Extension Solely Dedicated Acceleration Management Function
(AMF)
Target Best performance, no portability. Best performance/portability trade off.
Accelerator access
Direct management. Management through a portability layer.
Pros - Direct interaction between the compute node and the accelerators could provide slightly better performance
- Resource discovery, scheduling, setup etc.- Support for automatic integrated acceleration management for accelerated VM's Migration- Hardware portability and independence.
Cons - Portability/migration hard to support- Code complexity: specific code needed for each accelerator type, with impact to the project performance, security, maintainability, etc.
- The accelerator allocation phase might take time, as an handshake procedure has to be put in place- Scalability issues

Outline
✓ Motivation✓ Interesting Use Cases✓ OPNFV Requirements✓ Nomad Introduction✓ Future Plan

Interesting Usecase - SmallCellGW
Lookaside Encryption Acceleration used in CMCC’s commercial deployment

Interesting Use Cases - NFVIaaS
● For people that are familiar with ETSI NFV standard, NFVIaaS was among the NFV use cases that published in Phase 1 documents
● However few of us grasp what this use case actually meant for business, until now.
● Now many operators begin to build their own Public Cloud. If an operator has a multiple site supported Public Cloud, it then would be able to offer NFVIaaS to NFV app companies that has its own content, or VNF, or MANO, but without NFVI. These NFV apps then could be deployed on the Public Cloud.
● There is still a problem for the operator who owns the Public Cloud - so further service classification on NFVIaaS without acceleration
Acceleration makes NFVIaaS a possibility
Outline
✓ Motivation✓ Interesting Use Cases✓ OPNFV Requirements✓ Nomad Introduction✓ Future Plan
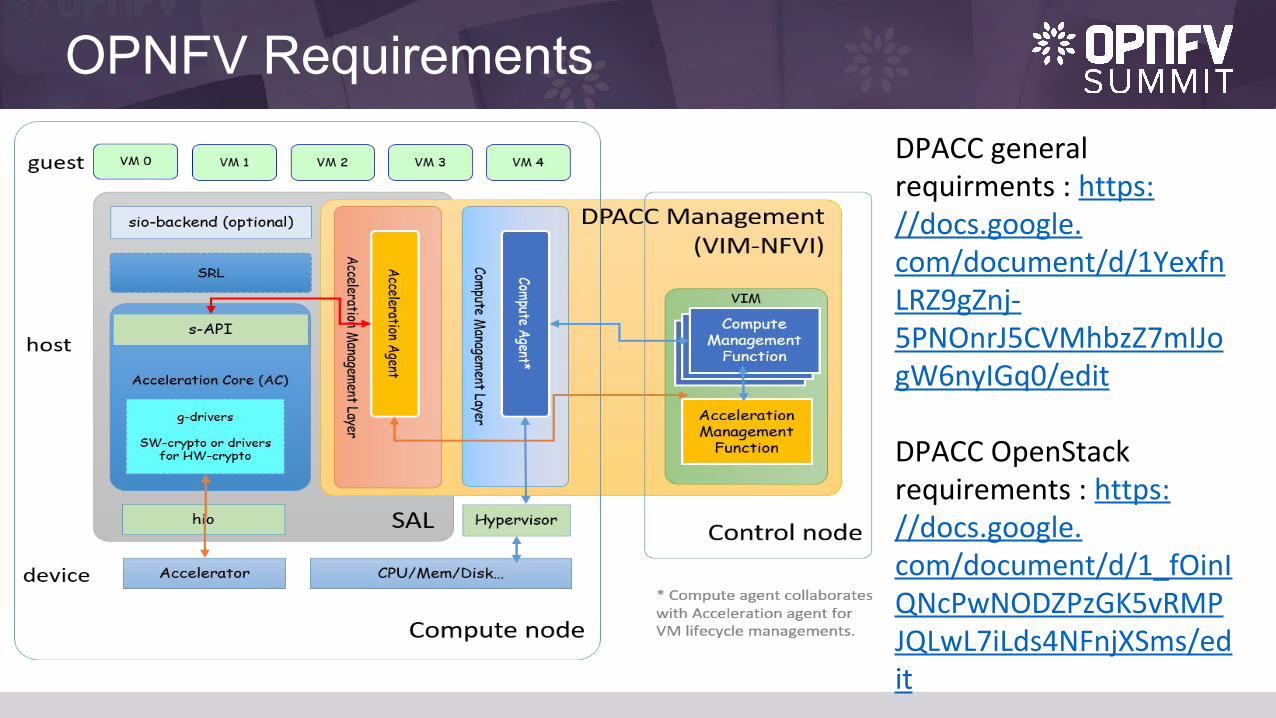
OPNFV RequirementsDPACC general requirments : https://docs.google.com/document/d/1YexfnLRZ9gZnj-5PNOnrJ5CVMhbzZ7mIJogW6nyIGq0/edit
DPACC OpenStack requirements : https://docs.google.com/document/d/1_fOinIQNcPwNODZPzGK5vRMPJQLwL7iLds4NFnjXSms/edit

OPNFV Requirements – Accelerator Lifecycle Management
❑ Static accelerator management (MUST)❑ Configuration of programmable accelerators (MUST)❑ Fine-grain QoS control via virtualization and slicing (MUST)❑ Basic fault management features, including fault detection for
accelerators, reclaim of acceleration resource allocated to faulty virtual containers.
❑ Advanced fault management features, such as automatic detection and recovery of faulty agent, and fault analysis or problem diagnosis for acceleration resources (MAY)
❑ Acceleration resource scaling for running virtualization containers (MAY)
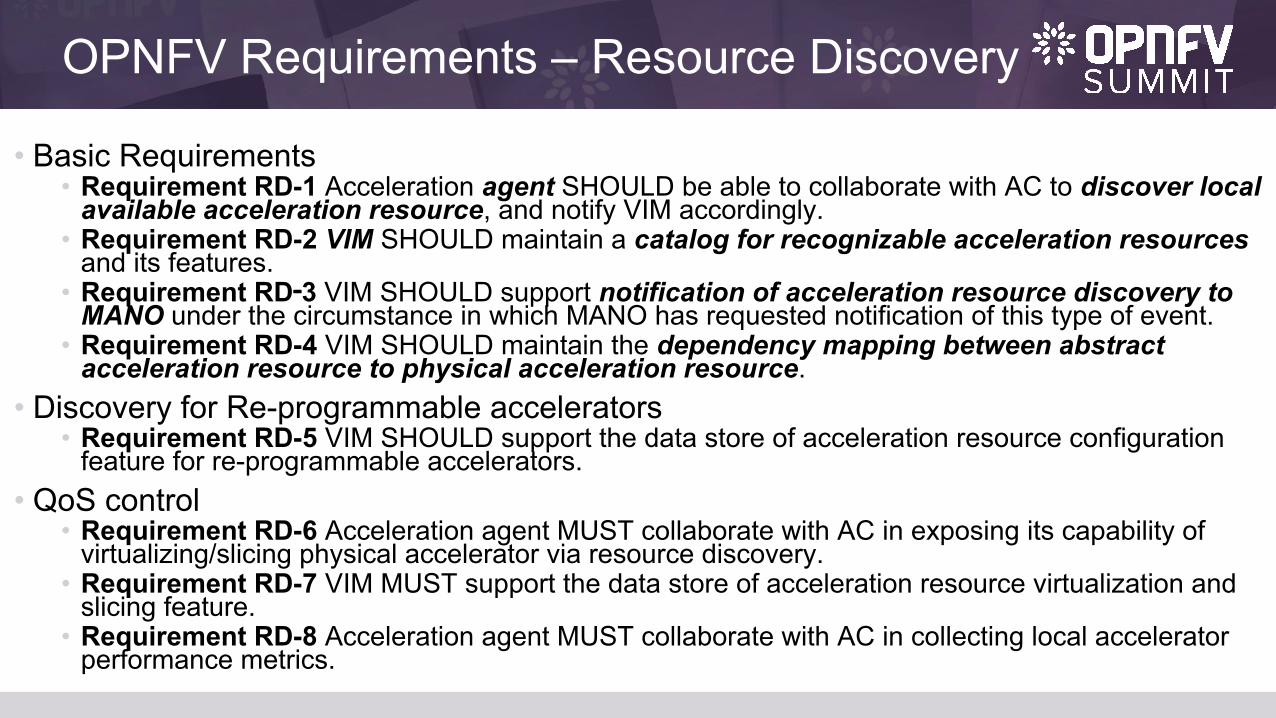
OPNFV Requirements – Resource Discovery
• Basic Requirements• Requirement RD-1 Acceleration agent SHOULD be able to collaborate with AC to discover local
available acceleration resource, and notify VIM accordingly.• Requirement RD-2 VIM SHOULD maintain a catalog for recognizable acceleration resources
and its features.• Requirement RD‑3 VIM SHOULD support notification of acceleration resource discovery to
MANO under the circumstance in which MANO has requested notification of this type of event.• Requirement RD-4 VIM SHOULD maintain the dependency mapping between abstract
acceleration resource to physical acceleration resource.• Discovery for Re-programmable accelerators
• Requirement RD-5 VIM SHOULD support the data store of acceleration resource configuration feature for re-programmable accelerators.
• QoS control • Requirement RD-6 Acceleration agent MUST collaborate with AC in exposing its capability of
virtualizing/slicing physical accelerator via resource discovery.• Requirement RD-7 VIM MUST support the data store of acceleration resource virtualization and
slicing feature.• Requirement RD-8 Acceleration agent MUST collaborate with AC in collecting local accelerator
performance metrics.

OPNFV Requirements – Resource Management
• Resource LCM management Operations• Resource Selection• Resource Allocation• Resource Update• Resource Release

OPNFV Requirements – Resource Selection
• Basic Requirements:• Requirement RS-1 Acceleration Agent MUST support the capability to report
acceleration resource’s running status information.• Requirement RS-2 VIM MUST maintain an inventory for up-to-date running status for
all available acceleration resource, based on aggregated information from local acceleration agents.
• Requirement RS-3 VIM MUST support the capability to choose an appropriate accelerator based on the acceleration capability requirement in the virtualization resource allocation request from MANO based on the acceleration instance inventory.
• Configuration for Re-programmable accelerators• Requirement RS-4 VIM MUST support the selection of a re-programmable accelerator
based on its registered configuration feature.• Fine-grained QoS control
• Requirement RS-5 VIM MUST support the capability of selecting part of a physical accelerator to fulfill a request, given the corresponding physical accelerator supports virtualization and slicing.

OPNFV Requirements – Resource Allocation
• Basic Requirements:• Requirement RA-1 Acceleration agent MUST collaborate with AC in supporting
the capability of triggering attaching/detaching an accelerator to a virtualization container (e.g., VM).
• Requirement RA-2 VIM MUST support the capability to interact with local acceleration agent on selected compute node to trigger resource allocation on selected accelerators.
• Configuration for Re-programmable accelerators:• Requirement RA-3 Acceleration agent MUST support the capability to collaborate
with AC to configure an accelerator.• Fine-grained QoS control
• Requirement RA-4 Acceleration agent MUST support the capability to collaborate with AC to slice an accelerator and attach/detach only part of it to a virtualized container.

OPNFV Requirements – Resource Update
• Basic requirements• All the basic requirements are covered by previous requirements stated above.
• Scaling requirements (optional)• Requirement RU-1 VIM MAY support the capability of modification (Increase,
Decrease) of NFVI acceleration resources upon request from MANO.• Requirement RU-2 VIM MAY support notification of NFVI acceleration
resource modifications per MANO’s request or earlier subscription.

OPNFV Requirements – Resource Release• Basic requirements
• Requirement RR-1 VIM SHOULD support the capability to terminate the association of a given set of acceleration resources from a given VNF, and update data stores accordingly, upon request from MANO, or as part of the termination process of a virtualized container.
• Requirement RR-2 VIM SHOULD support notification of acceleration resource termination under the as per MANO’s request or earlier subscription.
• Fault Management requirements• Requirement RR-3 VIM May support reclaim of associated acceleration resources for a
crashed or faulty virtualized container.• Requirement RR-4 Acceleration agent MUST collaborate with AC in detecting faulty
accelerators.• Requirement RR-5 VIM MUST support the capability to collect fault information related
to both physical and virtual accelerators from acceleration agents and report to MANO if needed.
• Requirement RR-6 VIM MAY support detection and auto recovery of faulty acceleration agents.
• Requirement RR-7 VIM MAY support fault analysis or problem diagnosis for acceleration resources.

OPNFV Requirements – Detailed Gap Analysis
Gap RD-1 Openstack needs to define a general metadata for all types of accelerators, including SoC accelerators and programmable accelerators, such as GPU and FPGA. Gap RD-2 Openstack needs to provide standard southbound APIs to get accelerator metadata.Gap RS-1 There is no abstract acceleration resource descriptor available in Heat template.Gap RS-2 There is no mapping dependency maintained or used by Nova in VM deployment for acceleration resource orchestration.Gap RA-1 OpenStack needs to identify correspondent acceleration image to be used in programmable accelerator instantiation and instruct the acceleration agent to program the selected accelerator accordingly.Gap RA-2 OpenStack needs to differentiate virtualized and physical accelerators in its inventory data store, and instruct the acceleration agent to configure the selected physical accelerator accordingly to allocate the intended virtual accelerator.Gap RR-1 OpenStack needs to update the data stores respectively for physical and abstract accelerators when reclaiming released acceleration resource.Gap RR-2 OpenStack needs to support automatic reclaiming of acceleration resource attached to faulty virtualized container.

Outline
✓ Motivation✓ Interesting Use Cases✓ OPNFV Requirements✓ Nomad Introduction✓ Future Plan

Nomad introduction - first stab at nomad-compute
● BP Driven, everything starts from scratch
● Target code available in August
● Try to make OPNFV Colorado release if possible

Nomad Introduction – Future Direction
Design Goal:
● Loosely coupled (more than
Neutron)● DB oriented management● Network: DAG based● Storage: affinity driven● Compute : capability based
scheduling● Big Data: FPGA/GPU programming● Fine grained fault monitoring and
management (bloom filter?)

Outline
✓ Motivation✓ Interesting Use Cases✓ OPNFV Requirements✓ Nomad Introduction✓ Future Plan

Nomad future plans
● Develop storage and network related features if there are volunteers that are interested.
● Try to make Nomad less VM centric○ consider FPGA that is sitting out on PCI as an independent resource for
anything that may be deployable on it. Like VMs on CPUs○ Good for portability and scalability
● Work with existing teams (e.g. EPA)
● Fault management

Thank you

Backup Slides

OpenStack Austin Summit BoF Discussion
https://etherpad.openstack.org/p/AUS-BoF-NOMAD

The missing piece and Ironic
❑When it comes to NFV and the use of VNFs that have been created and are managed in this way, they are not visible to Neutron and not captured in Nova as consumable functions.❑ Ironic has the role of discovering and initializing “bare metal” devices
and exposing them to the rest of the OpenStack system. However there is no requirement that all resources used by Nova for example need be bare metal based. ❑We need a public api that allows the dynamic registration of resources
that happen to be hosted on acceleration hardware.

What is Application Acceleration
Typically when you run something on alternate hardware as a subcomponent of the application, we call it an accelerated application, and the specific function is often call an accelerated function. This is commonly called the “offload” model. Sometimes referred to as co-processing, and we see analytics as an example of this type of workload.
The “inline” model frequently puts a specialized accelerator between an application and an interface to other systems. We all know about Graphics “acceleration” as an example, or wetware interface pre-processors used in genomics. An inline function may be standalone and not have any external processing dependencies
A few platforms have emerged to support this, namely GPU and FPGA, and along with even more specific hardware are commonly connected to a more traditional CPU via PCI or similar technology.
As these patterns and specific workloads have become highly popular we have seen general CPU vendors add acceleration platforms to the chipset. Graphics, communications, encryption are all examples.
So how do we deploy and manage acceleration hardware? and
How do we manage them separately from the service that exploites them?

OpenStack by principal - Nova
Nova by definition manages the allocation of compute resources.• Through meta data it is dynamically aware of a
compute node and its characteristics. This may include some close or nearby resources.
• Nova can be taught with alternate meta data about what look like standalone compute nodes that are in fact acceleration devices.
• By providing additional filters and automation scripts Nova can manage a standalone acceleration device just like a general CPU device

OpenStack by principal - Glance
Glance is used to manage the life cycle of artifacts used for provisioning• Glance understands the artifacts through meta data
associated with a resource• Just like VMs need images, accelerated devices need
to be loaded with bitstreams• By providing additional artifact types and meta data
Glance can be utilized to manage the artifacts needed for acceleration device life cycle management

OpenStack by principal - Neutron/Cinder
Neutron and Cinder manage traditional data center devices and do not understand how they are implemented. The device is just something to be configured, and separately monitored and managed.• The devices are consumed much like a PaaS or SaaS
level service. An appliance model. If the appliance is implemented with CPU, GPU, FPGA, discrete hardware or aliens it does not matter.
• The manager holds operational state and configuration data about the devices, just like Nova understands number of vCPU and how much has been allocated.

Conclusions
• This completes the puzzle and separates out the concerns for creating and consuming VNFs to create NFV and NFVi.
• This approach provides a more generalized way to manage acceleration hardware while still separating life cycle from specific function.
• By supporting all 3 types of configuration as well as consideration of inline and offload models, any specific performance optimization for each can still be applied, but without affecting the alternates.
While current steps in Nova to support acceleration, and in Nomad to support the domain specific notions of NFV…
This approach completes the picture

OpenStack to the rescue
By leveraging Glance and Nova to manage the provisioning of acceleration hardware in all models, the accelerated application/function can be adopted directly into any automation a customer needs.
Functions provided by these accelerated systems can be combined and consumed like any PaaS or SaaS service
Not sure how to mix this in the flow
The following set of slides provide a bit of background and then the reasoning to lead to the following proposed approaches. Since Nomad already has a path forward I leave it to the Nomad veterans to determine if this is of interest and how to weave the ideas.





























