Embed Size (px)
Citation preview

107
Chapter -5
DEVELOPMENT OF A GEOSTATIONARY BEACON SYSTEM FOR TEC MEASUREMENT AND SIMULATION OF
ORTHOGONAL CODED SPREAD SPECTRUM SYSTEM
This chapter gives details on the design and development of a coherent
beacon receiver system suitable for reception of amplitude modulated beacon
signals from the Indian geostationary beacon payload CRABEX. Details of
simulation of an orthogonal coded spread spectrum system is given which can be
used to deal with the loss of lock observed in the above system.
5.1 Introduction
Communications have come to rely heavily on ionospheric radio in spite of the
sometimes unpredictable behavior of the ionosphere as a transmission medium. Far
from being the static reflector of radio waves that the communicator would desire,
the ionosphere continuously and sometimes suddenly, undergoes structural changes
on almost all scales of size and time. Such changes upset the often delicate balance
of operational parameters which must work together to optimize communications.
This can be attributed to fading, low signal strength or even loss of signal. The
properties of the ionosphere which govern these changes have been the object of
research since the earliest days of radio.
In the previous chapters, the importance of understanding and characterizing the
continuous variation of ionosphere has been addressed. As seen, there are some LEO
beacon satellites available as of now, to initiate a study in this direction for
understanding the behavior of ionospheric electron density spatially by the method
of ionospheric tomography, with simultaneous data from a chain of receiving
stations. But, with a coherent LEO beacon satellite, the data availability is sparse.
The advent of geostationary beacon satellites for ionospheric studies has made
possible measurement of long continuous records of total electron content for many

Chapter-5
108
fixed locations on Earth, helping to study the ionosphere by using multiple
frequencies, as explained by Garriott and Little [1960].
A geostationary satellite because of its orbit appears stationary above any particular
place on Earth. Hence in order to track such a satellite, detailed ephemeris is not
required. Once the satellite is launched and positioned, the location can be known
and a ground station antenna can be pointed towards this location. Also, unlike a
LEOS beacon receiver antenna, which has a wide beamwidth to cover from horizon
to horizon, the antennas for receiving geostationary beacon signals have a narrower
beamwidth to point to the satellite. This will also result in a higher gain for the
ground receiving system.
5.2 Need for a geostationary beacon
Geostationary satellites allow the observation of changes in the ionospheric electron
content under nearly constant geophysical conditions. From Low Earth orbiting
satellites one can derive primarily spatial changes of electron content, since the time
for a scan provided by a satellite pass is short compared with timescales typical for
ionospheric processes (except scintillations) as mentioned by Pulinets et al [1996].
Polar orbiting satellites also provide a scan in latitude for nearly constant local time
if the observed electron content is referred to a ionospheric point in a given height.
The disadvantage of using LEO satellites for ionospheric studies is the bad time
resolution even when several satellites can be observed; the time duration from one
useful pass to the next is of irregular interval. On the other hand, geostationary
satellites provide no spatial resolution at all when only one observing station is used.
Hence a combination of data from low earth orbiting and geostationary satellites
could be used to override these advantages, as addressed by Leitinger [1972].
The orbital height of geostationary satellite is 36,000 km. By using multiple
coherent frequencies with frequency ranges above 130 MHz as the beacon signals,
TEC can be derived in different ways. The popular methods of TEC measurements
with a geostationary beacon include Faraday rotation (FR), Differential Doppler
(DD) and Modulation phase delay (MPD). The method proposed by Smith [1971]
also addresses the removal of n ambiguity, which is one major constraint with

Chapter-5
109
measurements from LEO beacon systems. It has been shown from several earlier
works like Ramarao et al [2004], that above 5000 km the upper atmosphere does
not contribute measurably to the Faraday rotation angle. This is due to the decrease
in the weighting function of the Earth's magnetic field and also a decrease in
electron content with increasing altitude. The Differential Doppler is not affected by
the above mentioned weighting function and therefore is measurable along
the total range of upto 36,000 km. The extraction of TEC from measurement of
MPD throws light on the coarse variation of TEC, which addresses the nπ ambiguity
with the TEC measured with DD technique.
5.3 Genesis of geostationary beacon systems
The first geostationary beacon reported to be used widely for ionospheric studies is
from the ATS-6 experiment. This satellite, launched in 1974, carried a multi-
frequency radio beacon as detailed in Davies et al [1975], Grubb [1972]. The
reception of ATS-6 from a number of ground receiving stations permitted
continuous monitoring of the integrated electron content in the ionosphere as
reported by a series of papers described in the Proceedings of the Satellite beacon
group symposium of COSPAR, 1976.
This geosynchronous satellite ATS-6 placed in orbit over 94º West meridian in May
'74 was relocated over 35º East meridian for a period of one year, from August 1975
to July '76. From this location, the satellite was visible for observations by receiving
stations in India. One of the receiver locations stationed at VSSC, Trivandrum aimed
at scintillation studies. The detail of development of the receiver system for ATS-6
is provided in VSSC Technical Report [1977]. Thus the ATS-6 satellite provided for
the first time to Indian experimenters, highly phase coherent radio beacon
transmissions from a stationary source, thus making possible, study of the
ionospheric and plasmaspheric total electron content, and the phase and amplitude
scintillations over a wide range of frequencies, as detailed in various research works
from SPL, Trivandrum and PRL, Ahmedabad.
There has been a lull before the launch of the next geostationary beacon, probably
because of the huge cost involved with launch. The next known GSAT coherent

Chapter-5
110
beacon payload was flown in the Indian mission of GSAT-2 in 2003. The Coherent
RAdio Beacon EXperiment (CRABEX) payload designed and developed by VSSC
was one of the scientific experiments of opportunities onboard the second Indian
geostationary mission launched from Sriharikota (SHAR). This satellite was positioned
at an angle of 55° elevation and 263° azimuth from true North. This formed the second
phase of the CRABEX national project, aimed to carry out detailed studies on the low
latitude ionosphere. (The detail of the first phase has been covered in Chapter 3). Here,
the investigation is carried out for studying the propagation characteristics of coherent
signals at VHF and UHF transmitted by the onboard beacon in GSAT-II payload.
5.4 The Coherent Radio Beacon Experiment (CRABEX) national
project - Phase II
The onboard beacon of the CRABEX payload transmits four coherent frequencies, two
in VHF and two in UHF, with linear polarisation. The frequencies chosen are 400.032
MHz, 399.03192 MHz, 150.012 MHz and 149.01192 MHz. These signals traverse the
atmosphere and reach the ground station. In the ground receiver system, this is received
as two circular polarisations (LCP & RCP). The receiver processes the RCP and LCP
signals separately. The RCP chain separates out the incoming frequencies to generate a
phase coherent IF from the 400MHz, which forms the reference signal used for phase
comparison with other frequencies. The ionospheric parameters derived from this data
are Differential Doppler (DD), Modulation Phase Delay (MPD), Faraday Rotation
(FR) and Scintillation (amplitude and phase). Out of this, the initial three parameters
are related to TEC, wherein the first two together give the Integrated Electron Content
(IEC) from the satellite to ground and the third one gives the TEC from ground to ~
2000 km. In order to measure these, the receiver generates the following outputs.
The phase difference between RCP and LCP of VHF carrier, which is twice
the Faraday rotation. The Faraday rotation is the angular rotation of the plane
of polarisation undergone by the VHF carrier.
The differential phase between the VHF and UHF carrier which is known as
Differential Doppler.

Chapter-5
111
The phase difference between the low frequency coherent CW modulation of
~ 1MHz on the VHF and UHF, called as Modulation Phase Delay. This is
required to unwrap the 2nπ ambiguity of the Differential Doppler.
Signal strengths of all the four frequencies which can be correlated to
amplitude and phase scintillations at the frequencies.
There have been very few geostationary beacon satellites in the past to help conduct
long term ionospheric research and the present Coherent Radio Beacon Experiment
project offers a unique opportunity in every sense.
5.4.1 Scientific objectives of CRABEX Phase II
The major scientific objectives for the GSAT phase of CRABEX project can be
listed as:
Measurement and comparison of integrated total electron content using three
different techniques – viz, Differential Doppler, Modulation phase delay and
Faraday rotation.
Determination of plasmaspheric electron content (PEC), which is the
difference between the TEC measured by Differential Doppler and Faraday
rotation. This is based on the fact that Faraday rotation of the plane of
polarisation of a radio wave is proportional to the component of gyro
frequency of the electrons along the ray path, which is dependent on the
geomagnetic field as mentioned by Poletti-Liuzzi et al [1976]. Since this
field decreases rapidly with height and is negligible at heights greater than ~
5000 km, the TEC deduced by Faraday rotation method can be assumed to
be obtained upto this height only as shown by Davies[1989]. Now, with the
Differential Doppler method, the integrated electron content upto the satellite
orbit height can be measured, and hence a difference between these two
gives the PEC. As the plasmaspheric content responds directly to solar wind
characteristics and in turn to solar activity, this becomes an important
measurement towards space weather studies.

5.5 B
The o
transm
link tr
diagra
A sta
freque
of bett
109. A
used t
Carrie
Study of g
scintillatio
traversing
and also ha
Beacon tra
onboard seg
mitter with b
ransmission
am of the onb
Figu
able 50.004
encies are ge
ter than 5 pa
A divider cir
to generate th
er (SSB-SC)
generation, s
on data recei
the ionosph
as direct bea
ansmitter s
ment has a
built in pow
of VHF and
board segme
ure 5.1 Sche
MHz oscil
enerated in a
arts in 106 pe
rcuit of ÷ 50
he required
) modulators
1
sustenance a
ived. The sc
here is relate
aring on com
system
coherent ra
wer module a
d UHF sign
ent.
ematic block
llator forms
a phase cohe
er year and a
0 reduces th
LSB frequen
s. The comb
112
and decay of
cintillation o
ed to plasma
mmunication
adio beacon
and associat
nals. Figure
k diagram of
the basic
erent manner
a short term
he oscillator
ncies throug
bined carrier
f plasma irre
of VHF and
irregularitie
s.
n system con
ted antenna
5.1 shows th
f onboard seg
oscillator fr
r. This had a
stability of b
frequency t
gh Single Sid
frequency a
Ch
egularities fr
d UHF radio
es in the ion
nsisting of
elements fo
he simplifie
gment
from which
a long term s
better than 1
to 1 MHz w
de Band Sup
and LSB fre
hapter-5
from the
o waves
osphere
an AM
or down
d block
all the
stability
1 part in
which is
ppressed
equency

Chapter-5
113
are fed to the respective UHF and VHF power amplifiers. This is then fed to
corresponding VHF and UHF Quadra loop antennas. The beacon is powered by an
integrated DC/DC converter, which works from a variable DC input voltage of 28 –
42 V, corresponding to the satellite bus voltages.
The antenna is simple, aerodynamically structured, rugged shorted transmission line
type, consisting of a shorting stub (the radiator), a horizontal conductor and its
reflector or the ground, as shown in figure 5.2. The open end is used to tune the
antenna over a band of frequency proportional to the length of the radiating element
which can be approximated to quarter wavelength of the resonant frequency. As the
frequencies are set wide apart, two antennae, one for VHF and other for UHF are
developed.
Figure 5.2 Schematic diagram of onboard antenna
It is of practical concern that due to the onboard constraint for weight and power
reduction, the output power for the transmitter frequencies are 250 mW for the
carriers and 125 mW for the sub-carriers. The entire system was designed and
developed by AVN, VSSC, with the design details as per preliminary design report
numbered AVN/CRABEX/G-SAT-II/VSSC/1/2K.
5.5.1 Specifications of the beacon transmitter
The specifications of the beacon transmitter are as given in Table 5.1.

Chapter-5
114
Table 5.1 Transmitter specifications
(VHFC) Carrier 150. 01200MHz/250mW
(VHFLSB) LSB 149.01192MHz/125mW
(UHFC) Carrier 400.03200MHz/250mW
(UHFLSB ) LSB 399.03192MHz/125mW
Frequency stability Better than 5 ppm
Short term stability 1 x 10-9 /sec
DC Input Voltage +42V ± 2V
Command Input ON/OFF for DC Input and LSB switch off
Antenna
Type Quarter wave Transmission Line
Centre frequencies 150MHz (VHF) and 400MHz (UHF)
Gain +3.5dBi
Polarisation Linear
VSWR 1.2
5.6 Requirements of a ground receiver system
The ground receiver system for reception of the GSAT-II CRABEX payload
consists of the three major subsystems, Antenna, Signal Processing unit and PC
based data acquisition unit. The design of each subsystem is initiated by finalising
its requirements, which is detailed below.
5.6.1 Antenna subsystem
The antenna should have narrow beamwidth and high gain. The mechanical
structure of antenna has to be moved along the elevation axis, so that the antenna
can be pointed to the exact direction of GSAT-2 after its launch. Once this is fixed,
the system is locked to prevent any further movement. The azimuth of the satellite
plane is measured from True North (geodetic north). It is defined as the direction
along the earth's surface towards the geographic North Pole and differs from the
magnetic north pointed by a compass. True North is fixed using a gyroscope. A
single antenna structure should be able to handle both polarisation receptions as this

Chapter-5
115
will ensure equal phase for the radio waves at the point of reception at the antenna.
Two separate antennae are required for VHF and UHF.
5.6.2 Signal processing subsystem
The receiver system involves reception of very low level signals from the antenna
and hence it is always advantageous to provide a LNA and/or outdoor unit as close
to the antenna as possible to minimize the losses. The cable lengths from the antenna
to the front end should be phase matched at all the frequencies. As the received
signal levels are low, a small phase mismatch due to cable properties can affect the
data quality. To reduce the changes in cable properties, the cables are shielded again
and taken through a small trench from the outdoor unit to the indoor unit. This helps
to ensure normal day-night temperature fluctuations do not affect the signals. The
receiver design should be coherent, so that any strong extraneous noise in the bands
of interest also will not make the system unlock.
5.6.3 DAQ subsystem
The DAQ system has to sample all the analog channels obtained from the receiver
system simultaneously and track them continuously at the user defined sampling
rate. The data acquisition software should start acquisition automatically as soon as
the system locks to carrier frequencies and continuously record eight channel data,
with preferably an online display of the signals being acquired. The data file should
have a header line indicating the sampling rate and the channel name and the
filename should have the date and time of start of acquisition embedded in it. The
DAQ software has to work in Auto mode and Manual mode: in auto mode, the
software automatically records the data onto a new file at 0000 hrs every day,
whereas in manual mode, the file save time is decided by the user.
5.7 Link budget
The link budget for the GSAT system is calculated before initiating the final design
of the receiver system and is given in Table 5.2 below. It is seen that as the
transmitter power is very low, a high gain antenna along with a highly sensitive
receiver system is needed to record the received data.
Chapter-5
116
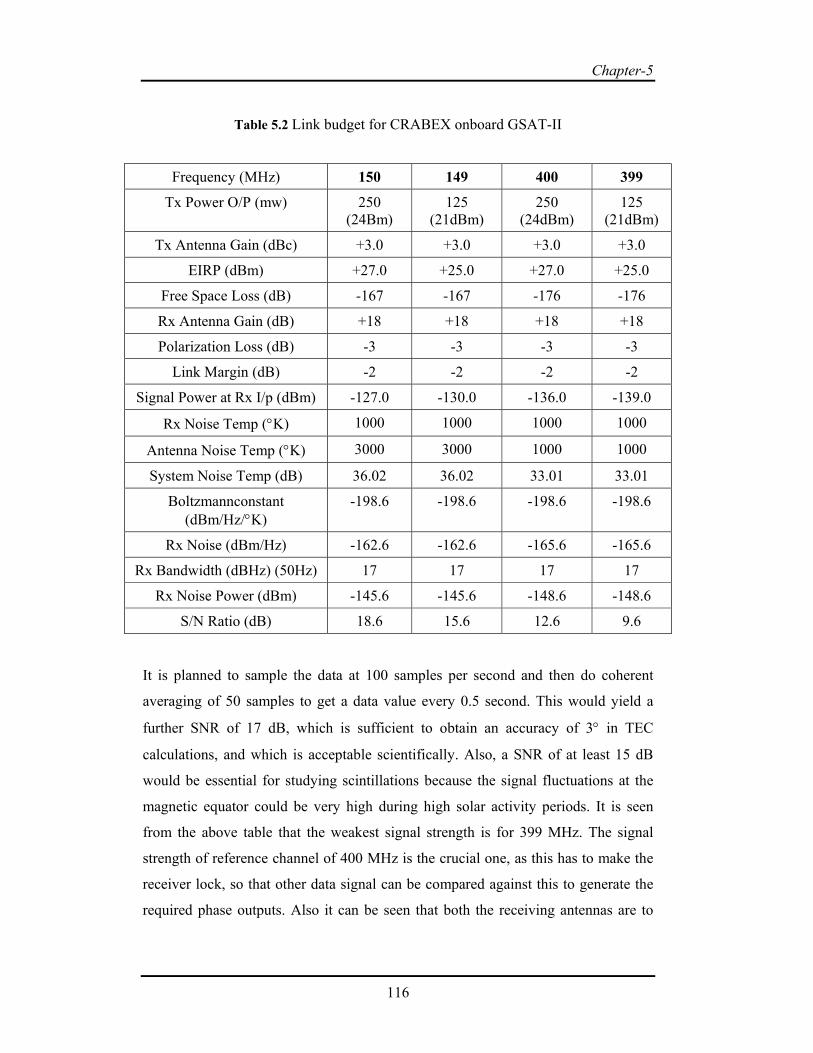
Table 5.2 Link budget for CRABEX onboard GSAT-II
Frequency (MHz) 150 149 400 399
Tx Power O/P (mw) 250 (24Bm)
125 (21dBm)
250 (24dBm)
125 (21dBm)
Tx Antenna Gain (dBc) +3.0 +3.0 +3.0 +3.0
EIRP (dBm) +27.0 +25.0 +27.0 +25.0
Free Space Loss (dB) -167 -167 -176 -176
Rx Antenna Gain (dB) +18 +18 +18 +18
Polarization Loss (dB) -3 -3 -3 -3
Link Margin (dB) -2 -2 -2 -2
Signal Power at Rx I/p (dBm) -127.0 -130.0 -136.0 -139.0
Rx Noise Temp (°K) 1000 1000 1000 1000
Antenna Noise Temp (°K) 3000 3000 1000 1000
System Noise Temp (dB) 36.02 36.02 33.01 33.01
Boltzmannconstant (dBm/Hz/°K)
-198.6 -198.6 -198.6 -198.6
Rx Noise (dBm/Hz) -162.6 -162.6 -165.6 -165.6
Rx Bandwidth (dBHz) (50Hz) 17 17 17 17
Rx Noise Power (dBm) -145.6 -145.6 -148.6 -148.6
S/N Ratio (dB) 18.6 15.6 12.6 9.6
It is planned to sample the data at 100 samples per second and then do coherent
averaging of 50 samples to get a data value every 0.5 second. This would yield a
further SNR of 17 dB, which is sufficient to obtain an accuracy of 3° in TEC
calculations, and which is acceptable scientifically. Also, a SNR of at least 15 dB
would be essential for studying scintillations because the signal fluctuations at the
magnetic equator could be very high during high solar activity periods. It is seen
from the above table that the weakest signal strength is for 399 MHz. The signal
strength of reference channel of 400 MHz is the crucial one, as this has to make the
receiver lock, so that other data signal can be compared against this to generate the
required phase outputs. Also it can be seen that both the receiving antennas are to

Chapter-5
117
have a high gain of 18dB so as to meet the SNR requirements. A parabolic dish and/
or a Yagi antenna are the possible choices for high gain at these frequencies.
5.8 Receiver system design
The design of the receiver system is highly complex as it has to receive very small
signal levels and also need to continuously monitor and record the data. The
following section highlights the design, development and implementation details of
the major subsystems for the receiver, which consists of antennae, outdoor unit,
indoor unit and a PC based data acquisition unit. The block schematic of this is
shown in figure 5.3.
Figure 5.3 Block schematic of ground receiver system
The ground receiver consists of three antennae immediately followed by three
LNAs. The 150 MHz signal is received at the antenna as left circularly polarised
(LCP, ordinary) and right circularly polarised (RCP, extra-ordinary) component and
fed to the dual 150 MHz channels. For 400 MHz received signal, no separation of
the polarisation components is made as the Faraday rotation measurements at UHF

Chapter-5
118
is small. The outputs from the LNAs are then taken to a single outdoor unit
consisting of amplifiers, mixers and filters for all the channels, and which performs
the down conversion to intermediate frequencies of 10.7 MHz, 9.7 MHz, 4.0125
MHz and 3.0125 MHz. This is taken by two long cables to the indoor unit, where
the phase information is extracted from the received signals using Phase Locked
Loops. The UHF carrier and sideband are locked to two PLLs and are taken as the
reference signals. The VHF carrier and sideband are then phase compared with the
corresponding references and the outputs are taken as quadrature signals. For the
measurement of Faraday rotation at VHF, the output from the LCP and RCP of the
antennae are processed separately and compared in another phase detector. Thus
there are four pairs of outputs from the indoor unit. These are
Phase difference between UHFC and VHFC
Phase difference between VHFS and UHFS
Phase difference between VHFLCP and VHFRCP
Amplitude of UHFC and VHFC
These four pairs of data signals are taken through an 8 channel data acquisition card
to PC where a LabVIEW software performs the data acquisition and archival.
5.8.1 Antenna
The first major component of the receiver system is the antenna. Two different types
of antennae were proposed for GSAT beacon reception. The linearly transmitted
signal from the satellite beacon gets polarised because of its propagation through the
ionosphere, and hence in order to study the ionospheric effects at these frequencies,
polarisation reception antennas are preferred at the ground stations as mentioned by
Evans and Cott [1976]. If we have two separate antennae which can receive these
polarized signals separately, it is possible to process these to find out the rotation
undergone by the radio wave. This in turn is proportional to the Faraday rotation as
detailed by George Kennedy [1977], and this can be used to find TEC as detailed in
Chapter 3.
Thus, in the present context, the antennae proposed are

Chapter-5
119
(i) Crossed Yagi array
This requires two separate antennas, one for VHF (149 and 150 MHz) and other for
UHF (399 and 400 MHz). Each of the Yagi elements are of crossed type so as to
receive both the polarisations at the required frequencies. Though it is needed to
separate out LCP and RCP at VHF only, for design compatibility, similar type of
elements are first planned for both. In such a case, a phase matched network is
needed at UHF antenna output, before LNA block. Both the antenna are mounted
parallel along a single boom, so as to maintain phase coherency and reduce pointing
inaccuracies.
(ii) Parabolic dish antenna
Two separate dish antennae are needed, with one having VHF (149 and 150 MHz)
feed and the other having UHF (399 and 400 MHz) feed. The feed is designed to
receive both polarisations separately. Care should be taken in maintaining pointing
accuracies, as two separate structures are required.
A detailed study is done for optimizing the antenna to be selected for this project. It
is seen that a parabolic dish antenna has higher gain and lower beamwidth than a
crossed Yagi. But at the frequencies of reception here, design of a proper feed poses
a challenge for the same dish size. This can be overcome if the dish sizes are made
in proportion to the frequencies of reception. ie, VHF should have a bigger dish size,
which poses an implementation problem. Finally, this resulted in the selection of
antennae as crossed Yagi for VHF and parabolic dish for UHF. The design and
implementation of both these antennas are detailed below.
5.8.1.1 Specifications of Yagi antenna for VHF reception
The following are the finalised specifications for receiving VHF signals using Yagi
antenna.

The co
geome
Using
design
VHF.
increa
Folded
imped
ohms.
imped
param
T
Fre
G
Pola
V
Beam
Ban
onfiguration
etry, both co
Figur
g the softwar
ned for the
The gain of
ase in receiv
d dipoles a
dance transf
. These balu
dance. The
meters.
Table 5
Type
quency
Gain
arisation
VSWR
m width
ndwidth
n of a crosse
onfigured in
re 5.4 Geom
re “Y agicad”
individual e
f the array is
ver sensitivi
are used as
formation ha
uns have bee
following T
1
5.3 Specifica
Crossed Y
ed dipole Ya
the same bo
metry of a cro
”, the follo
elements of
estimated to
ity for all c
s receiving
ave been us
en made of λ
Table 5.4 s
120
ations of Yag
Yagi (one for L
150 MHz,
+13dB
LCP &
1.5 no
10° - 20
2 M
agi antenna h
oom, is show
ossed Yagi (S
owing optim
the Yagi. T
o be ~ 13dB
channels so
element in
sed to obtai
λ/2 coaxial c
shows the f
gi antenna
LCP and one
149 MHz
Bi min
& RCP
minal
0° typ.
MHz
having a hor
wn in figure 5
Source : ARRL
mized config
This array h
, which actu
that signal
n the array.
in an output
cables of 50
finalised Ya
Ch
for RCP)
rizontal and
5.4.
website)
guration ha
has 13 eleme
ually calls fo
ls can be d
. Baluns w
t impedance
ohms charac
agi antenna
hapter-5
vertical
as been
ents for
or ~ 3dB
detected.
with 4:1
e of 50
cteristic
design

Chapter-5
121
Table 5.4 Yagi antenna design parameters for 150MHz
Nomenclature Length (mm) Spacing
R 1075 0
Dp 975 300
D1 965 429
D2 885 671
D3 875 1008
D4 865 1423
D5 859 1907
D6 857 2451
D7 851 3041
D8 845 3678
D9 845 4346
D10 845 5048
D11 841 5774
D12 839 6504
D13 839 7238
Diameter of Boom 75mm
Diameter of element 152 mm
Length of boom 7.2 mtrs
As it is not possible to measure the antenna pattern accurately onsite after
installation, theoretical evaluation is opted here. However, the return loss of the
antenna was measured after installation and each polarization checked separately.
5.8.1.2 Specifications of parabolic dish antenna for UHF reception
The UHF antenna is designed to receive Right Circular Polarized signals (RCP).
Hence the feed is left circularly polarized, as explained by Constantine Balanis
[1982]. A parabolic Aluminium reflector of 24 metre aperture diameter was
refurbished and installed at SPL (TERLS area) for reception of UHF signals. The
Aluminium reflector is chosen as it is non-corrosive and is suitable for use at humid

Chapter-5
122
places. The feed for the dish antenna is the 400 MHz microstrip patch antenna
presently used for LEOs reception.
The air dielectric microstrip antenna is designed to generate circular polarization
without external polarizer arrangements and is found to be the best choice at this
frequency. This type of antenna is mechanically simple, light weight, less complex,
offers less aperture blockage, gives less phase centre errors and can be designed to
meet required amplitude taper requirements with less complex design.
An almost square patch antenna diagonally fed with a single coaxial feed and having
almost the same dimensions as the one used for LEOS reception and given in Table
4.4 is chosen as feed. This antenna has been designed using 3 mm thick Aluminium
sheet for the ground plane and single side copper-clad Hylam sheet of 1.6 mm thick
for the patch. The copper coated side is kept facing down at a height of 10 mm from
ground plane by using Nylon spacers at the four corners of the top plate. The feed
geometry is shown in figure 5.5.
Figure 5.5 Geometry of 400 MHz feed

Chapter-5
123
The elevation plane patterns showed that the gain of the antenna at 65° from the
zenith falls by about 13.5 dB. Assuming an aperture efficiency of 76 %, the
expected gain at 400 MHz for a parabolic reflector of aperture diameter 20 feet (6.1
meter) with the microstrip antenna as feed is given by
GD= (πd/λ0)2* 76% (5.1)
which expressed in dB is
GD dB= 20*log 10 (πd/λ0) -1.2dB =26.9dB (5.2)
where λ0 is the free space wavelength of 400 MHz frequency and D the aperture
diameter of the parabolic reflector.
The detailed specification of the parabolic dish is given in Table 5.5 below.
Table 5.5 Specifications of parabolic antenna
Frequency of operation 400 and 399 MHz
Gain > 18 dBi
VSWR 1.5 nominal
Impedance 50 Ω coaxial
F/D of antenna 0.4 to 0.5
Polarization of feed LCP
A photograph of the feed realized for 400 MHz is shown in figure 5.6.
Figure 5.6 Photo of 400 MHz feed

Chapter-5
124
5.8.2 Outdoor unit
The outdoor unit is mounted at the base of the antenna structure itself and is
hermetically sealed. The signals from the antennae are routed to the outdoor unit
using phase-matched cables as described in Chapter 4. The specifications for the
outdoor unit is given in the table below and block diagram is shown in figure 5.7.
Table 5.6 Specifications of outdoor unit
No. of input ports 3
Input
RCP 1 VHFC, VHF LSB
RCP 2 UHFC, UHFLSB
LCP VHFC, VHFLSB
No. of output ports 2 (RCP & LCP)
Output
RCP 10.7MHz, 9.7MHz, 4.0125MHz,
3.0125MHz
LCP 4.0125MHz
Gain Better than 30 dB for all frequencies
Noise figure 3dB maximum
Bandwidth 2MHz ± 10%
Input and output impedance 50Ω
VSWR 1.5:1
Max. input handling capability +10dBm
Input signal dynamic range 20dB for all channels.
Input signal level -120 to -140dBm
The outdoor unit comprises of LNAs, preamplifiers, Voltage Controlled Crystal
Oscillator (VCXO), frequency multipliers, mixers, amplifiers, power splitters and
power combiners. There are three channels corresponding to UHF, VHFLCP and
VHFRCP. All channels have similar design architecture.

Chapter-5
125
Figure 5.7 Block schematic of GSAT outdoor unit
The front end of each channel is a LNA. Its main function is to amplify extremely
low signals without adding extra noise, thus preserving the required signal to noise
ratio (SNR) of the systems at extremely low power levels. A good LNA has high
gain, low noise figure, good input and output matching and stability at the lowest
possible current drawn from the amplifier as detailed by Lucek and Damen [1999].
The LNA is followed by preamplifier-filter assembly which gives a linear gain of
~30 dB. For the next stage of down-conversion to IF frequencies, the Local
Oscillator (LO) frequencies, 389.332 MHz and 145.9995 MHz, are generated by
multiplying a stable VCXO, of fundamental frequency 48.6665 MHz by 8 and 3.
The LO1 frequency for the VHF chain is 145.9995 MHz and for the UHF chain is
389.332 MHz. As the onboard frequency has a stability of only 5 ppm, the ground
system is designed to take care of this drift in the frequencies by using a VCXO.
Chapter-5
126
The same VCXO is used for converting the 150 MHz signals of both RCP and LCP
channels to obtain the 4.0125 MHz IF so that the difference between RCP and LCP
components is preserved in phase with respect to the receiver input. After down
conversion, the IF frequencies are VHFC : 4.0125 MHz, VHFLSB : 3.0125 MHz,
UHFC : 10.7 MHz and UHFLSB : 9.7 MHz respectively. The RCP and LCP signals
maintain two separate paths throughout the outdoor unit. The bandwidth of all the
post converter output is 2MHz. The coherent oscillators used for the frequency
conversion to IF ensure the phase relationship between the input frequencies and the
output frequencies. The power supply and the VCXO signal for this unit come from
the indoor unit through the output ports (RCP & LCP). The RCP signals are
combined at the output of the outdoor unit and brought out through a single
connector. This helps reduce the number of long cables to the indoor unit, as well as
to maintain the signal integrity.
5.8.3 Indoor unit
There are two input ports for this unit. The indoor unit comprises of power splitters,
crystal filters, amplifiers, phase locked loops, phase detectors and output low pass
filters. The block diagram of the indoor unit is shown in figure 5.8 and the major
specifications in the table 5.7 below.

Chapter-5
127
Figure 5.8 Block schematic of GSAT receiver indoor unit
For the modulation phase delay measurement, the 150 MHz carrier and its 1 MHz
side band is brought to the frequencies 4.0125 MHz and 3.0125 MHz respectively,
as also the reference carrier of 400 MHz and its side band to 10.7 MHz and 9.7 MHz
by a phase coherent conversion process employing phase locked loop tracking
filters. Using two separate long loop phase tracking filters, the 150 MHz carrier and
the 400 MHz reference carrier are locked to the stable 48.6665 MHz reference
oscillator. The 1 MHz reference side band on 400 MHz is then reconstructed from
the difference of 10.7 MHz and 9.7 MHz VCXO output using a short loop tracking
filter. The phase difference between the 1.00008 MHz IF output of 150 MHz signal
and the 1.00008 MHz VCXO output of 400 MHz signal gives the 1 MHz
modulation phase delay of 150 MHz signals with respect to the 1 MHz modulation
on 400 MHz. This difference modulation phase is obtained by using the quadrature
components Lc and Ld with the corresponding phase detectors, as shown in the
figure.

Chapter-5
128
For the Faraday rotation measurement, the difference phase is recorded as two
quadrature outputs. This is obtained by multiplying the 4.0125 MHz IF output of the
LCP channel with the 4.0125 MHz reference oscillator signal and its quadrature, La
and Lb in two separate phase detectors. The amplitude of RCP component is the
result of multiplying the signals in phase while the amplitude of LCP component is
the detected output obtained by multiplying out-of-phase signals.
All these outputs are low pass filtered and taken out via a 37 pin connector.
Table 5.7 Specifications of indoor unit
No. of inputs 2 (RCP & LCP)
Input channels RCP 10.7 MHz, 9.7 MHz, 4.0125 MHz, 3.0125 MHz
LCP 4.0125 MHz
No. of outputs 10
Output channels (a) I and Q channels of 4.0125 MHz LCP compared with
4.0125 MHz of RCP
(b) I and Q channels of phase compared 4.0125 MHz of LCP
(c) I and Q channels of phase compared 3.0125 MHz of RCP
(d) Amplitude of 400/ 399 MHz
(e) Amplitude of 150 MHz
(f) Two TTL level signals for both PLLs’ lock.
All the above are provided on a 37pin D type connector.
Input impedance 50Ω
Input VSWR 1.5
Noise figure <4dB
Input signal dynamic range 30dB
Input signal levels -80 to -100dBm
Video bandwidth 40Hz ± 10Hz
5.8.4 Data acquisition unit
The four pairs of signals obtained from the receiver are fed into an 8 channel
simultaneous sampling card SC 2040, where they are sampled simultaneously. The
sampling pulse for this is obtained from the PC through a 68 pin SCSI connector,

Chapter-5
129
which is also connected to a PCI data acquisition card, PCI 6035E, residing in the
PC. This multifunction I/O card has both analog and digital input ports. The analog
signals from the indoor unit are sent to the analog channels and the PLL lock signals
are connected to two digital lines. The start acquisition pulse to SC-2040 is sent
through software from the PC.
The entire data acquisition is controlled by Windows based data acquisition software
developed in LabVIEW which acquires, displays and stores the data samples at the
required sampling rate. The time period and amount of data to be recorded
continuously are determined by this software. The PLL lock signals sensed from the
indoor unit forms the basic criteria to start data acquisition. These are typically TTL
level signals and help to identify whether the PLL is ON/OFF. Though only 10.7
MHz lock signal is used to start acquisition, data from both 10.7 MHz and 1.00008
MHz are logged along with the analog channel data to aid in post processing to
study the temporal variations of the various parameters. The block schematic of the
PC based data acquisition unit is given in figure 5.9, followed by the specifications.
Figure 5.9 Block schematic of data acquisition unit
5.8.5 Data acquisition software
The software for data acquisition is developed in LabVIEW. The main requirements
are :
Simultaneous acquisition of eight analog channels and two digital channels

Chapter-5
130
Start acquisition to be controlled by the state of one digital channel
Provision for manual and automatic stop for data acquisition
Filename to be generated automatically linked with PC date and acquisition
start time.
These functions are implemented using two subVIs - one for data acquisition and the
other for data archival. Both these have a single front panel display. The sampling
rate is kept default as 0.25 Hz, as the changes in GSAT data is expected to be slow.
As there is no Doppler shift involved, the variation detected here can be assumed to
be due to ionosphere only. This chosen sampling rate is kept as a header line in the
raw data file. The software then checks the digital channel corresponding to 10.7
MHz and checks if it is TTL high for at least 1 minute. All the analog data channels
are then acquired, displayed online and saved into eight columns in the data file. The
data file also contains the status of 10.7 MHz PLL and 1.00008 MHz PLL as the last
two columns. For automatic stop of data recording, the TTL pulse has to be low for
a minimum of 5 minutes. This helps to overcome intermittent loss of lock due to any
other strong extraneous signals in the vicinity of the antenna beam. A typical
screenshot of the software front panels during one set of data acquisition is shown in
figure 5.10.
Figure 5.10 Front panels of DAQ software

5.9
Th
wit
lau
5.9
Be
end
Eac
pre
fol
Th
out
pow
an
test
and
ens
As
to r
9 Tests an
e test for the
th signal gen
unch; second
9.1 Integrate
fore the laun
d-to-end. Th
ch of the
ecautions an
lowed here a
e outdoor u
tdoor require
wer supply v
oscilloscop
ted with mu
d range. All
sure phase co
the receiver
reduce man-
Fi
d results
e beacon rec
nerators and
d in the field
ed laborator
nch of satell
he details of
receiver sub
nd initial ca
also.
unit and indo
es a tuning
voltages. A p
e and then
ultiple signal
l these signa
oherency at
r senses very
-made interfe
igure 5.11 B
ceiver was d
d later on wi
test mode w
ry level test
lite beacon, t
all the tests
bunits are
alibration te
oor unit we
DC voltage
pair of outpu
connected
l generators
al generator
the input. T
y low level s
ference.
Block schem
131
done in two
ith the actua
with the beac
ts and result
the entire sy
done are re
tested sepa
ests done d
ere tested in
also from t
uts of the ind
with the DA
in the labor
rs are locked
The laborator
signals, utm
matic of integ
steps, first i
al beacon pa
con in orbit.
ts
ystem is inte
eported in SP
arately and
during LEO
n the integra
the indoor u
door unit wa
AQ unit. T
ratory to che
d to a stable
ry setup is as
ost care is ta
grated test se
in the labora
ayload prior
grated and t
PL Test repo
then integr
OS receiver
ated mode o
unit apart fro
as monitored
he receiver
eck its total
e source in
s shown in fi
aken during
etup in lab
Chapter-5
atory mode
to satellite
tested from
ort [2005].
rated. The
testing is
only as the
om the DC
d first using
system is
sensitivity
the lab to
figure 5.11.
these tests

Chapter-5
132
The indoor unit and outdoor unit are connected with short and long cables during the
tests. The cable losses are also characterised for the desired frequencies. The back
panel indicator of indoor unit is connected to an oscilloscope to check 10.7 MHz and
it is matched with the LED indicator on the front panel when the system is locked to
400 MHz. A detailed test matrix is generated to verify the performance. In order to
check the phase measurement module for measuring Faraday rotation, a mechanical
phase shifter at 150 MHz is introduced before the LNA of RCP channel and the
change in outputs are noted with the phase shifted in steps of 90 degrees.
In the second phase of testing, the receiver system is connected to CRABEX
transmitter directly by providing > 100 dB attenuation to each channel. This
integrated test set up is shown in figure 5.12. As the transmitter power is high
compared to the receiver sensitivity, both the units were kept in different rooms and
long cables were run. Since the receiver has three inputs (two VHF and one UHF),
the VHF output of transmitter was passed through a power splitter after attenuation.
The setup was operated for 30 minutes to check the stability of the transmitter. The
mechanical phase shifter used in the laboratory test was also introduced in one of the
output of the VHF phase splitter and performance evaluated. Some typical results
tabulated are given in Table 5.8 and 5.9.
Figure 5.12 Integrated laboratory test set up with CRABEX transmitter
Chapter-5
133
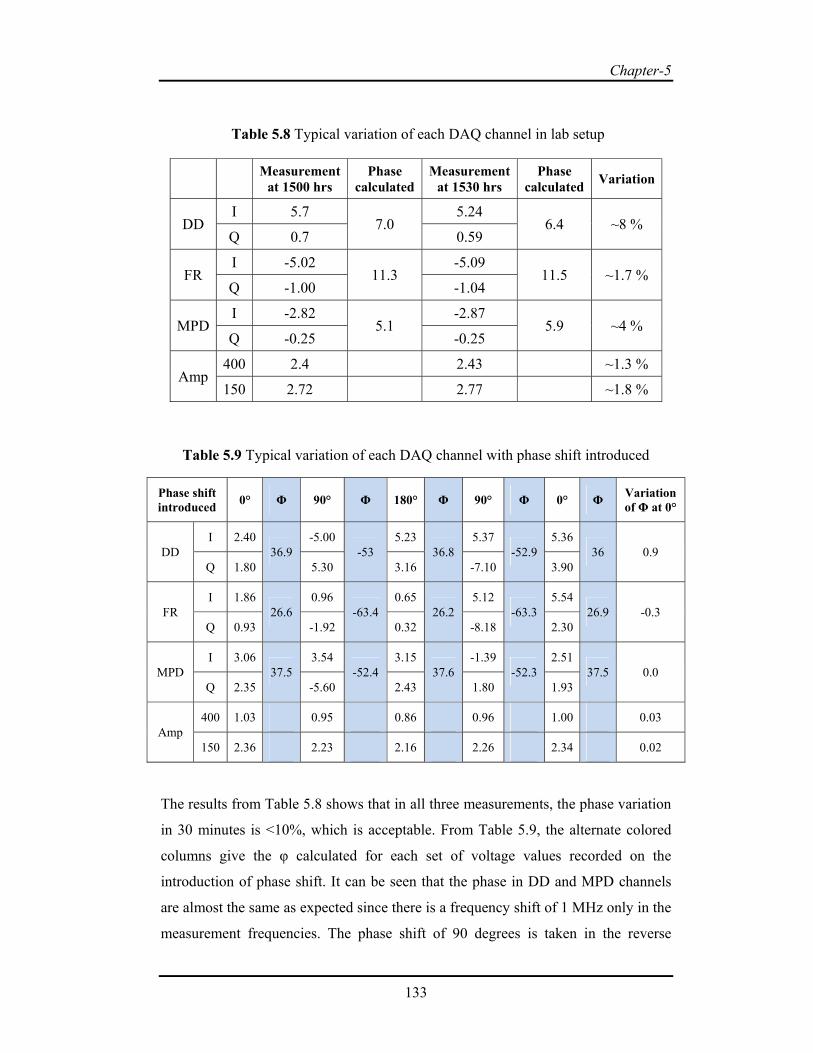
Table 5.8 Typical variation of each DAQ channel in lab setup
Measurement at 1500 hrs
Phase calculated
Measurement at 1530 hrs
Phase calculated Variation
DD I 5.7
7.0 5.24
6.4 ~8 % Q 0.7 0.59
FR I -5.02
11.3 -5.09
11.5 ~1.7 % Q -1.00 -1.04
MPD I -2.82
5.1 -2.87
5.9 ~4 % Q -0.25 -0.25
Amp 400 2.4 2.43 ~1.3 %
150 2.72 2.77 ~1.8 %
Table 5.9 Typical variation of each DAQ channel with phase shift introduced
Phase shift introduced 0° Φ 90° Φ 180° Φ 90° Φ 0° Φ Variation
of Φ at 0°
DD I 2.40
36.9 -5.00
-53 5.23
36.8 5.37
-52.9 5.36
36 0.9 Q 1.80 5.30 3.16 -7.10 3.90
FR I 1.86
26.6 0.96
-63.4 0.65
26.2 5.12
-63.3 5.54
26.9 -0.3 Q 0.93 -1.92 0.32 -8.18 2.30
MPD I 3.06
37.5 3.54
-52.4 3.15
37.6 -1.39
-52.3 2.51
37.5 0.0 Q 2.35 -5.60 2.43 1.80 1.93
Amp 400 1.03 0.95 0.86 0.96 1.00 0.03
150 2.36 2.23 2.16 2.26 2.34 0.02
The results from Table 5.8 shows that in all three measurements, the phase variation
in 30 minutes is <10%, which is acceptable. From Table 5.9, the alternate colored
columns give the φ calculated for each set of voltage values recorded on the
introduction of phase shift. It can be seen that the phase in DD and MPD channels
are almost the same as expected since there is a frequency shift of 1 MHz only in the
measurement frequencies. The phase shift of 90 degrees is taken in the reverse

Chapter-5
134
direction, so that the calculated phase is negative. Though the tabulated values do
not indicate a system performance for the field tests, it indicates that the receiver
senses the variation in phase. It is also noted that when the system is fully switched
on and off, the initial phase value is always different as has been noted in the case of
LEOS beacon receivers dealt in Chapter 4.
5.9.2 Radiation mode tests and results
In the radiation mode of integrated test with CRABEX beacon, the transmitter
system was switched on from a high rise building few kilometres away and the
integrated ground receiver setup was checked for PLL lock and data acquired. In this
setup, though the antennas were kept in an upright position, the receiver was able to
lock to the beacon transmitter due to its good sensitivity. The data collected during
this mode of tests showed more variations than from the cable mode data given in
Table 5.8 as the signals were transmitted through antenna and a communication
channel and such a change is expected. When the transmitter was switched off, the
receiver went into noise reception and resumed receiver tracking when the
transmitter was switched on again. This ensured the readiness of the ground system
prior to launch. The photograph of Yagi antenna in upright configuration is shown in
figure 5.13.

Chapter-5
135
Figure 5.13 Yagi antennas during radiation mode of test
5.9.3 Field tests and results
After the launch of GSAT-2 in May 2003, the beacon payload was switched on after
about 3 weeks from the launch date, by which time the satellite was parked in a
stable orbit of 255° azimuth and 55° elevation, as viewed by an Indian station. The
first task was then to orient the antenna to point to the satellite and maximise its
signal outputs by adjusting the elevation angle. Both the 400 MHz parabolic dish
antenna and the 150 MHz Yagi antenna were slowly turned to receive the beacon
signal. The test setup during final installation and field tests is diagrammatically
shown in figure 5.14.

Chapter-5
136
Figure 5.14 Field test setup
The antenna was adjusted for the required elevation of 55° and the azimuth was
varied from 210 to 300 to optimize the direction of maximum signal strength, rather
than just fixing at 255°. This signal optimization was done using a spectrum
analyser. The data obtained during optimization of 150 MHz is plotted in figure
5.15. The plot so obtained is also an indirect measure of the antenna radiation
pattern.
Figure 5.15 Signal optimization for Yagi
Both the antennae were locked onto the direction of maximal signal strength. A
photograph of the final configuration of the parabolic dish antenna and Yagi antenna
is shown as figure 5.16.
-124
-123
-122
-121
-120
-119
-118
210 220 230 240 250 260 270 280 290 300
sign
al le
vel
azimuth
150 MHz, 20 points averaged

Chapter-5
137
Figure 5.16 Photograph of the parabolic dish antenna and Yagi antenna
When both the antennae are positioned for maximum signal strength, the received
signal strengths for all the coherent signals are monitored with the spectrum
analyser. The screenshots of the typical signal levels received by the antenna for all
the frequencies as observed with the spectrum analyser is shown in figure 5.17.

Chapter-5
138
Figure 5.17 (a) 400.032 MHz signal Figure 5.17 (b) 399.03192 MHz signal
Figure 5.17 (c) 150.012 MHz signal Figure 5.17 (d) 149.01192 MHz signal
In order to check the signal consistency, continuous monitoring of the signal
strength and frequency shift of the reference channel was done with the same setup,
to ensure that the signal levels are within expected range. The shift in the reference
frequency is an indicator of the shift in all the frequencies as all are coherent and is
the outcome of short term stability of onboard oscillator. Continuous measurements
were done to understand the trend of these variations and some typical plots
generated during these tests are shown in figure 5.18.

Chapter-5
139
Figure 5.18 (a) Variation of UHF frequency over 24 hours
Figure 5.18 (b) Variation of UHF signal strength over 24 hours
Figure 5.18(c) Variation of UHF signal strength over 72 hours
variation of 400.032000 MHz over a day
31800
31900
32000
32100
32200
32300
32400
1200 1545 1930 2315 300 645 1030 1415 1800
time (hrs)
frequ
ency
variation of signal strength over a day
-126
-124
-122
-120
-118
-1161200 1545 1930 2315 300 645 1030 1415 1800
time (hrs)
sign
al le
vel
continuous monitoring of GSAT 400 MHz signal - 72 hours
-107
-105
-103
-101
-99
-971200 1800 0 600 1200 1800 0 600 1200 1800 0 600 1200
time (hrs)
ampl
itude
mea
sure
d in
ana
lyse
r
z

Chapter-5
140
It is seen that under normal circumstances, the signal strength shows a variation of 6
dB and the frequency varies within a range of 400 Hz at 400.032MHz .
The antennas were integrated with the receiver system and continuous data acquired
in the PC. A typical dataset for DD channel with raw data and processed data is
shown in figure 5.19. It can be seen from the phase plot that there is only a small
change in frequency over time, though there is a phase reversal happening between
day and night. This basically implies that there is an enhancement in the electron
density during daytime and a reduction during the night time ionosphere, as has been
reported by various studies including Ramarao et al[2004].
Figure 5.19 (a) Raw data plot of Differential Doppler I, Q and Amplitude channels
(Dated 11.05.2005)
Figure 5.19 (b) Normalized phase plots of raw data showing phase reversal

Chapter-5
141
5.10 Offline processing software and discussion on the results
The GSAT beacon data saved in the file is processed to derive the TEC and
scintillation indices. An offline software is developed in LabVIEW which performs
initial signal processing and saves the processed data onto a file for later scientific
analysis.
The software first separates out the data channels corresponding to each mode of
measurement. The raw data file has the first two columns as the quadrature data
obtained for differential Doppler measurement ie, the phase difference between the
RCP signals of 400 MHz and 150 MHz, measured at the IF of 4.0125 MHz. These
are received as analog channels 0 and 1. These two are separated out first and
normalized to make the total swing to constant amplitude of ±1. It is then passed
through a fifth order Butterworth low pass filter with 1 Hz cutoff frequency and 10
Hz sampling rate, to smoothen out the received signal. The phase is calculated as the
inverse tangent of the ratio of quadrature channel to in-phase channel, followed by
cumulative phase extraction. This is then plotted and saved as secondary data file.
Similar signal processing is done for the other two pairs of data channels, viz, the
phase difference between 1.00008 MHz of 400 MHz and 399 MHz UHF RCP
channels with the 1.00008 MHz of 150 MHz and 149 MHz VHF RCP channels
measured as analog channels 2 and 3 of the DAQ card is processed to give the MPD;
and the phase difference between the 4.0125 MHz of 150 MHz RCP channel with
the 4.0125 MHz of 150 MHz LCP channel corresponding to analog channels 4 and 5
is processed to give the FR data. Each processed data set is saved onto the secondary
file as consecutive columns. The amplitude channels giving the signal strengths of
400 MHz and 150 MHz RCP channels form the 7th and 8th column in the raw data
file, which are normalized and filtered using a 20 mHz fifth order Butterworth low
pass filter to give the amplitude variations.
The front panel of the program with a sample processed data plot is shown in figure
5.20. The continuous variation in DD, MPD and FR are calculated and plotted for
the file chosen for analysis. The ATEC values calculated with the obtained DD and
MPD data is plotted in the second row of the front panel. The PEC plot also shown

Chapter-5
142
in the second row is calculated using ATEC data and FR data. Manju et al [2008]
provides details on importance of this PEC measurement. The last row of plots in
the front panel shows the amplitude variation of 400 MHz received data.
Figure 5.20 Front panel of processing software
All LabVIEW programs give a listing of the modular function calls as VI hierarchy.
The VI hierarchy indicates the number of subVIs and function calls made by the
program when it is run. The major subVIs used here are for phase calculation and
TEC calculation which is shown in figure 5.21.
Figure 5.21 VI Hierarchy of processing software

Chapter-5
143
The variation of Differential Doppler over a day as derived from the data collected is
shown in figure 5.22. The filenames below the plot give the data file details.
Gsat-2-3-06-10-53-29 AM.txt Gsat-2-3-06-7-06-59 PM.txt
Gsat-2-4-06 1-57-31 AM.txt
Figure 5.22 Variation of Differential Doppler data over a day
The above figure shows the cumulative phase variation for a total of almost 24 hours
for the differential phase data. It is seen that there is a gap in the datasets indicating
that more than 5 minutes unlock has been sensed by the DAQ and so the data
recording got automatically stopped. But since the acquisition is in a continuous
loop, the next set of data is acquired once the PLL is locked for more than 1 minute.
This has happened thrice over 24 hours, though the system has recovered within 30
minutes. Now, when the system restarts after a gap, it is also seen that the initial
values in each case is different from the final values of the last plot, which points to
the same uncertainty found with LEOs measurement.

Chapter-5
144
Gsat-2-4-06 1-57-31 AM.txt
Figure 5.23 Variation of phase changes in the three sets of data channels for a
data set
Figure 5.23 above shows the phase variation for all the three methods of TEC
measurement for one typical data file. The phase variation corresponding to absolute
TEC is calculated by summing the corresponding phase values of Differential
Doppler (DD) and Modulation phase delay (MPD) processed data. This is then to be
multiplied by a constant to get ATEC. Similarly, the instantaneous phase values of
the Faraday rotation (FR) channel data is subtracted from this summed value to
obtain the phase variation corresponding to Plasmaspheric Electron content (PEC).
It can be seen that the phase changes of FR and DD datasets follow the same trend,
while the MPD phase remains almost constant. Thus this MPD value gives the
coarse variation of ATEC while DD phase gives the fine variation of ATEC. Also, it
is known that the FR data gives the ionospheric electron content (IEC) upto a
maximum of 2000 km as mentioned by Ramarao et al [2004]. It is also known that
the extent of Earth’s ionosphere can be approximated upto this height, so that the
phase changes indicated by DD phase data and FR phase data can be similar. The

Chapter-5
145
MPD phase variation helps to address the 2nπ ambiguity associated with the LEO
beacon measurements, providing the initial phase value and its trend.
In the scenario of GSAT-II data reception, it is seen that as the signal strength is
very low, any extraneous noise could trigger unlock. In addition, the short term
stability of the onboard oscillator also sets an intricate arrangement, so that the
problem of absolute TEC measurement is not fully addressed. The main sources of
error in converting observations of the Faraday rotation angle of a signal from a
geostationary satellite into total electron content (NT) are the uncertainties in the
baseline corresponding to initial polarisation and in the total number of rotations, ie,
the nπ ambiguity.
5.11 Simulation of an Orthogonal Coded Spread Spectrum beacon
system
A spread spectrum beacon transmitter in a geostationary orbit can address the
uncertainty measurement of absolute TEC. In the earlier chapter, simulation of one
method for phase measurement by transmitting dual coherent frequencies has been
described. Yet another approach is to assign a unique set of spreading sequences to
each frequency in a multicarrier DS-CDMA system. Each of the sequences assigned
to a carrier is distinct. These sequences are selected to be mutually orthogonal (MO)
complementary sequences which help eliminate multiple-access interference (MAI)
in the ideal phase coherent channel, when compared to systems employing a single
spreading sequence to each carrier. The major difference with a normal direct
sequence system is that this system is not as resistant to frequency-selective fading.
However, the system appears well suited to certain types of communication
channels, such as fiber optical channels, which are relatively stable phase-coherent
channels, or Rician channels with a strong line-of-sight (LOS) path, where the
effects of frequency-selective fading are minimal.
In this chapter, a simulation technique for quadrature carrier DS-CDMA that
employs a set of spreading sequences for each carrier is attempted. De-spreading in
the receiver is accomplished on a carrier-by-carrier basis using a set of matched
filters matched to the spreading sequences applied to the respective carriers. Hence,

Chapter-5
146
excluding MAI and noise, the output of the matched filter corresponding to a
particular carrier channel is just the autocorrelation function of the corresponding
spreading sequence. This technique has been used with CDMA systems in wireless
and mobile communications as described in the patent of Lattard et al [1998] with
multiple carriers to enhance channel capacity and data rate.
The broad functional schematic of the simulation software is shown in figure 5.24.
Each of the code and carrier subVIs and modules are similar to the ones explained in
Chapter 4.
Figure 5.24 (a) Functional schematic of OCSS transmitter simulator
Figure 5.24 (b) Functional schematic of OCSS receiver simulator
The system consists of a transmitter block, propagation channel block and the
receiver block. A coherent signal source with in-phase and quadrature outputs forms
the first block. For generation of two different PN codes, a separate subVI is
developed, which give maximum cross-correlation. The communication channel is
modelled here as a Rician fading channel, instead of Rayleigh channel used in the

Chapter-5
147
earlier simulation. The exact channel model depends on various parameters like the
orbit type, atmospheric effects, and terrain and elevation angle as has been detailed
in various earlier works like Derek A Wells [2003], Trintinalia and Casillo [2006]
and Ali Arsal [2008]. The present configuration of a geostationary system is suitable
for study of small-scale variations. In such a randomly varying small-scale channel,
the distribution of received signal power or envelope dramatically affects the
performance of a receiver. These fluctuations are best described using a probability
density function (PDF), which characterizes all of the first-order statistics of a
channel as explained by Gregory D. Durgin [2002]. This PDF was originally
formulated for characterizing temporal fading measurements from upper-atmosphere
propagation. A typical distribution is shown in figure 5.25.
Figure 5.25 PDF of different communication channels
Thus for the present simulation, the Rician function is chosen, which can be
effectively represented as phase delay function in software. This can contribute for a
phase change in the carrier and code in addition to reducing the signal strengths.
The front panel of the simulation software for the multi-code modulation is shown in
figure 5.26 below. In this, two codes are used to modulate a quadrature carrier. The
input signal followed by modulation by a single PN sequence is shown first, and
then modulated by the second code and added with the first to give the final
transmitter signal. This passes through a Rician distributed channel, which produces
a phase shift in the transmitted signal in addition to adding noise. In the receiver, a
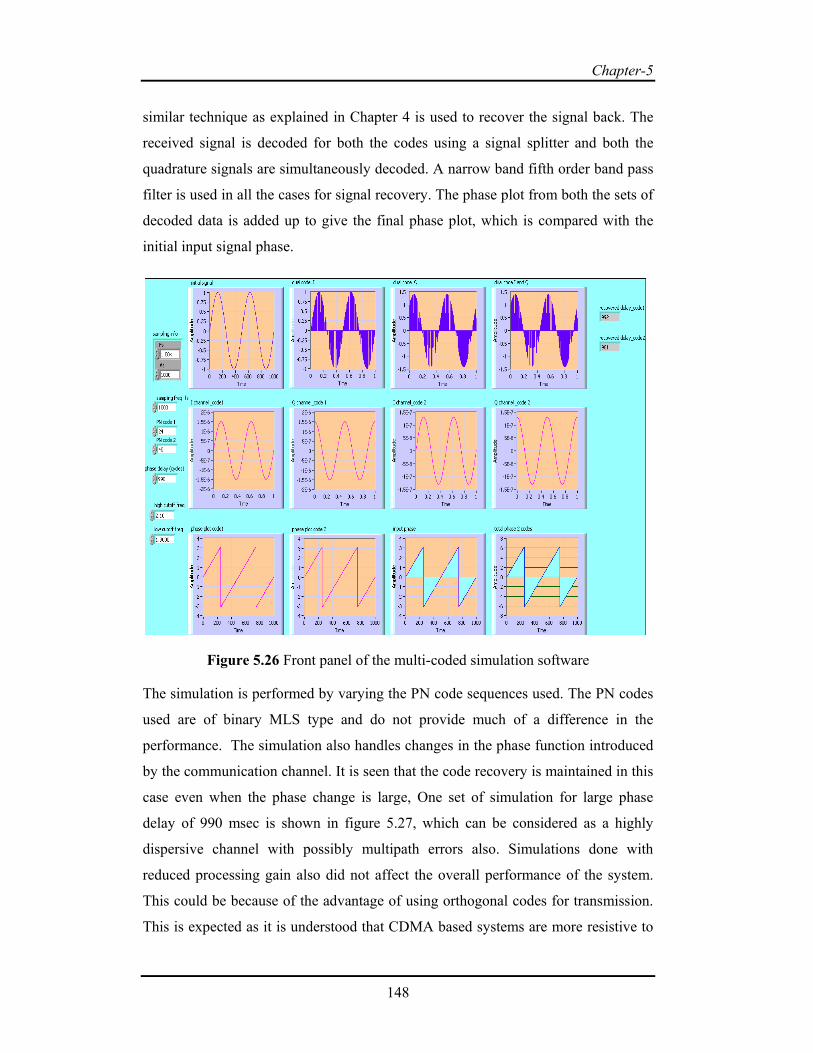
Chapter-5
148
similar technique as explained in Chapter 4 is used to recover the signal back. The
received signal is decoded for both the codes using a signal splitter and both the
quadrature signals are simultaneously decoded. A narrow band fifth order band pass
filter is used in all the cases for signal recovery. The phase plot from both the sets of
decoded data is added up to give the final phase plot, which is compared with the
initial input signal phase.
Figure 5.26 Front panel of the multi-coded simulation software
The simulation is performed by varying the PN code sequences used. The PN codes
used are of binary MLS type and do not provide much of a difference in the
performance. The simulation also handles changes in the phase function introduced
by the communication channel. It is seen that the code recovery is maintained in this
case even when the phase change is large, One set of simulation for large phase
delay of 990 msec is shown in figure 5.27, which can be considered as a highly
dispersive channel with possibly multipath errors also. Simulations done with
reduced processing gain also did not affect the overall performance of the system.
This could be because of the advantage of using orthogonal codes for transmission.
This is expected as it is understood that CDMA based systems are more resistive to

Chapter-5
149
channel fading and multipath, both of which can be represented by noise and phase
shift in the traversing signal.
Figure 5.27 Dual PN code modulating quadrature carrier in a dispersive channel
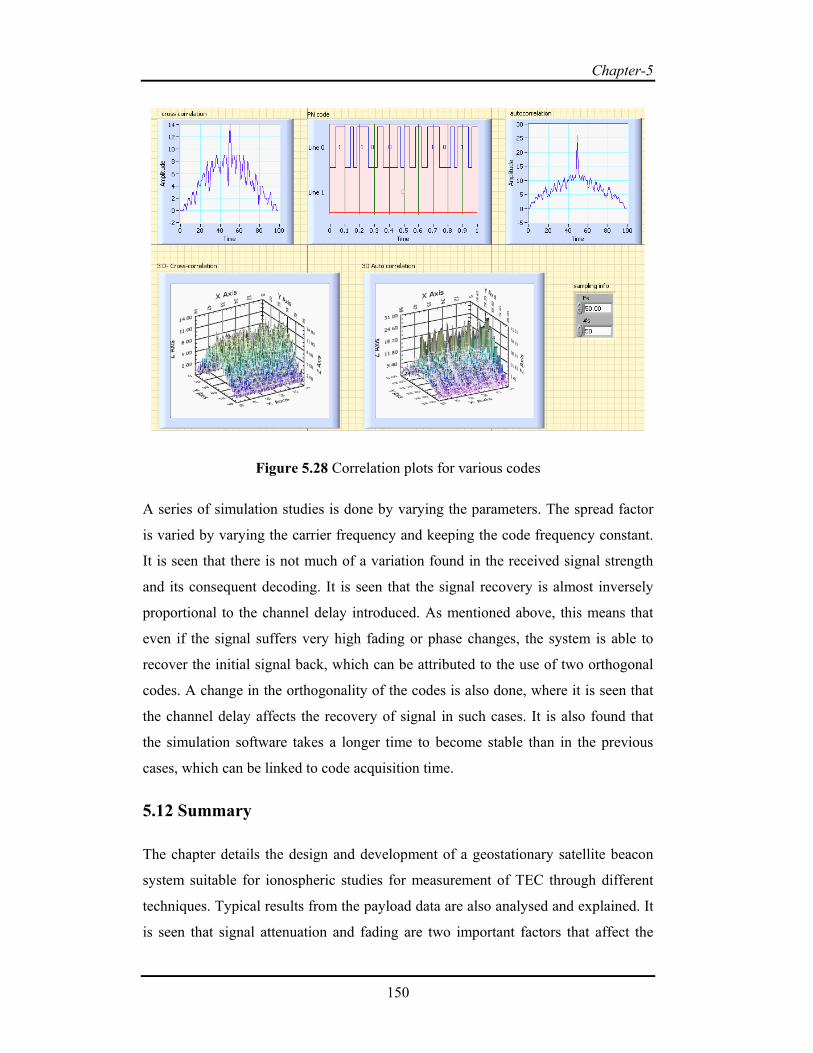
The autocorrelation and cross-correlation properties of the different PN codes used
in this simulation are plotted as a 3D graph in figure 5.28. The autocorrelation and
cross-correlation of two typical codes are also shown along with a digital
implementation of one PN signal.
Chapter-5
150
Figure 5.28 Correlation plots for various codes
A series of simulation studies is done by varying the parameters. The spread factor
is varied by varying the carrier frequency and keeping the code frequency constant.
It is seen that there is not much of a variation found in the received signal strength
and its consequent decoding. It is seen that the signal recovery is almost inversely
proportional to the channel delay introduced. As mentioned above, this means that
even if the signal suffers very high fading or phase changes, the system is able to
recover the initial signal back, which can be attributed to the use of two orthogonal
codes. A change in the orthogonality of the codes is also done, where it is seen that
the channel delay affects the recovery of signal in such cases. It is also found that
the simulation software takes a longer time to become stable than in the previous
cases, which can be linked to code acquisition time.
5.12 Summary
The chapter details the design and development of a geostationary satellite beacon
system suitable for ionospheric studies for measurement of TEC through different
techniques. Typical results from the payload data are also analysed and explained. It
is seen that signal attenuation and fading are two important factors that affect the

Chapter-5
151
ground reception of these signals. In order to address this, usage of a spread
spectrum modulated beacon in a geostationary orbit is proposed and simulation
studies using quadrature carrier CDMA techniques is explored, using LabVIEW. It
is seen that in these cases, usage of orthogonal codes for the carrier modulation
increases the fading margin and the signal can be recovered fast and thus it provides
an advantage over the existing beacon system.





























