-
7/31/2019 Development of a Computed Radiography-based
1/39
DEVELOPMENT OF A COMPUTED RADIOGRAPHY-BASEDWELD DEFECT DETECTION
AND CLASSIFICATION SYSTEM
WILLIAM KOAY FONG THAI
UNIVERSITI SAINS MALAYSIA
2008
-
7/31/2019 Development of a Computed Radiography-based
2/39
DEVELOPMENT OF A COMPUTED RADIOGRAPHY-BASEDWELD DEFECT DETECTION
AND CLASSIFICATION SYSTEM
by
WILLIAM KOAY FONG THAI
Thesis submitted in fulfilment of therequirements for the degree
of
Master of Science
JANUARY 2008
-
7/31/2019 Development of a Computed Radiography-based
3/39
ii
ACKNOWLEDGEMENTS
I would like to express my heartfelt gratitude to my supervisor,
Associate
Professor Dr. Lim Chee Peng for his supports and motivations.
His guidance and
incisive advice have inspired me to generate fruitful approaches
in achieving the
objective in this research. Without his effort, I would not able
to bring this research to a
completion.
My gratitude is extended to my beloved family members especially
my nieces,
Ying, Yen, Yue and Jun that support and encourage me all along
without hesitation. I
treasure dearly their encouragement and moral support.
Last but not least, I would like to express my sincere gratitude
to my friends, Ooi
Woi Seng who has dedicated his time to guide me in image
analysis, Lim Say Yarn in
programming, Wang Shir Li in analyzing the codes, Ng Theam Foo
in printing support,
and all my friends, for their unlimited support and
encouragement.
-
7/31/2019 Development of a Computed Radiography-based
4/39
iii
TABLE OF CONTENTS
Acknowledgements ii
Table of Contents iii
List of Tables vi
List of Figures viiList of Abbreviations xi
Abstrak xiii
Abstract xiv
CHAPTER 1 - INTRODUCTION
1.1 Background of Research 1
1.2 An Overview of Weld Defect Detection and Classification
5
1.3 Problem Statement7
1.4 Research Objectives 9
1.5 Research Scope and Approach 10
1.6 Thesis Outline 11
CHAPTER 2 - A LITERATURE REVIEW ON WELD DEFECT DETECTION AND
CLASSIFICATION
2.1 Introduction 13
2.2 An Overview of Computed Radiography in Non-Destructive
Testing(NDT) Applications 13
2.3 Weld Defect Detection and Classification System 15
2.3.1 Weld Extraction and Segmentation 16
2.3.2 Defect Detection 18
2.3.3 Feature Extraction and Defect Classification 25
2.4 Artificial Neural Networks 30
2.5 Adaptive Resonance Theory 32
2.5.1 Architecture of ART 34
2.5.2 Pattern Matching Cycle in ART 35
2.5.3 The Unsupervised Fuzzy ART Network 38
2.5.4 The Supervised Fuzzy ARTMAP Network 44
2.6 Summary 50
CHAPTER 3 WELD DEFECT SEGMENTATION USING ADAPTIVE
THRESHOLDING
3.1 Introduction 52
-
7/31/2019 Development of a Computed Radiography-based
5/39
iv
3.2 Background Study 52
3.3 Collection of Computed Radiography Images 54
3.4 Pre-processing of Weld Radiograph Images 59
3.4.1 Component Detection, Extraction and Alignment 60
3.5 Segmentation of Weld Radiograph Images 62
3.5.1 Adaptive Thresholding 63
3.6 The Niblack Approach 65
3.6.1 Defect Segmentation with the Niblack Approach 66
3.6.2 Results and Discussion 69
3.7 Summary 69
CHAPTER 4 WELD DEFECT PROFILING USING A FLAW MAP APPROACH
4.1 Introduction 71
4.2 Background 71
4.3 The Flaw Map 73
4.3.1 Generating the Flaw Map 75
4.3.2 Cleansing the Flaw Map 77
4.3.3 Joining Line Segments by Region Growing 79
4.3.4 Detecting the Defects with Adaptive Thresholding 81
4.4 Difference Between the Flaw Maps of Line-shaped Defects and
CircularDefects
88
4.5 Summary 90
CHAPTER 5 FEATURE EXTRACTION OF WELD DEFECTS FROM THE FLAW
MAPS
5.1 Introduction 92
5.2 Shape Descriptor 92
5.2.1 Sub-Regions in Weld ROI 95
5.2.1.1 Segmentation of the Sub-Regions 95
5.3 Texture Information 99
5.4 Feature Extraction from The Flaw Map 102
5.5 Summary 109
CHAPTER 6 WELD DEFECT CLASSIFICATION USING NEURAL-NETWORK-
BASED SYSTEMS6.1 Introduction 110
-
7/31/2019 Development of a Computed Radiography-based
6/39
v
6.2 Combining Predictions from Multiple FAM Networks 110
2.6.1 Majority Voting 111
2.6.2 Multi-Agent Systems 111
2.6.2.1 A Multi-Agent Classifier System (MACS) 112
6.3 Experimental Setup 115
6.4 Results and Discussion 118
6.4.1 Multi-defect Classification 120
6.4.2 Comparison between Single-defect and
Multi-defectClassifications
122
6.4.3 Overall Performance 123
6.4.4 Factors Contributing to Classification Errors 124
6.5 Summary125
CHAPTER 7 CONCLUSIONS AND FUTURE WORK
7.1 Conclusions and Contributions 126
7.2 Suggestions for Future Work 129
REFERENCES 132
APPENDIX
A Experiments Details of Chapter 6 140
PUBLICATION LIST 147
-
7/31/2019 Development of a Computed Radiography-based
7/39
vi
LIST OF TABLES
Page
Table 2.1 Function and Input channels of each layer 35
Table 3.1 Typical weld defects in computed radiographs 56
Table 3.2 Database of collect defect images in this study 58
Table 3.3 (a) Results of the Niblack approach on the ROI
ofConnector Weld
(b) Results of the Niblack approach on the ROI ofCover Weld
67
Table 4.1 The flaw table is obtained from the sample image
presented in Figure 4.9
85
Table 4.2 Summary of flaws extracted from flaw maps of
bothline-shaped and circular defects
91
Table 5.1 Description of Shape Descriptors 94
Table 5.2 (a) The corresponding sub-region features for flaws
inFigure 5.5(d)
(b) The extracted features for flaws in Figure 5.5(d)using shape
and texture descriptors
104
Table 5.3 (a) The corresponding sub-region features for flaws
inFigure 5.8(c)
(b) The corresponding features for flaws in Figure5.8(c)
106
Table 6.1 Classifier systems used for experimentation 116
Table 6.2 The extracted flaws used for experimentation 117
Table 6.3 Classification results of circular defect 118
Table 6.4 Classification results of line-shaped defect 119
Table 6.5 Results of multi-defect classification 121
Table 6.6 Comparison of single defect and
multi-defectclassification results
122
Table 6.7 Summary of the overall classification accuracy rates
123
-
7/31/2019 Development of a Computed Radiography-based
8/39
vii
LIST OF FIGURES
Page
Figure 1.1 Development of weld radiograph in radiography
systems (Hayes, 1998).
3
Figure 2.1 A generic architecture of an unsupervised ARTnetwork.
The two major subsystems are the attentionalsubsystem and orienting
subsystem. F1 and F2represent two layers of nodes in the
attentionalsubsystems. Nodes on each layer are fullyinterconnected
to the nodes on each layer. A plus sign(+) indicates an excitatory
connection, whereas a
negative sign () indicates an inhibitory connection
34
Figure 2.2 A schematic diagram of a typical pattern matching in
anART network.
(a) An input vector, a, goes to1
F and generates a STM
pattern X at1
F . Output pattern X, U then is
transmitted to2
F via the bottom-up LTM traces.
(b) A winning node in2
F is selected based on the
highest response. A prototype with pattern P is
sent to1
F via top-down LTM traces.
(c) In response to a mismatch between the input
vector, a, and then new2
F STM pattern X*, a reset
signal is initiated to inhibit the winning node.The hypothesis
testing cycle is repeated by re-applied
the input vector, ato1
F .
37
Figure 2.3 The Fuzzy ART Architecture 39
Figure 2.4 The architecture of Fuzzy ARTMAP 46
Figure 3.1 two weld ROIs are to be extracted for each fuel
nozzle,i.e. left and right side, for each weld program,
(a)Connector Weldand (b) Cover Weld
55
Figure 3.2 Each side of weld ROIs is divided into four areas,
i.e.background of radiograph, weld and non-weld regions,and
heat-affected zones
56
Figure 3.3 The summary of weld image pre-process methodology
59
Figure 3.4 Red-squared portion in the image is used for
automatic
alignment of the component
61
-
7/31/2019 Development of a Computed Radiography-based
9/39
viii
Figure 3.5 (a) The binary and skeleton process(b) Calculation of
slant component degree
61
Figure 3.6 A graphical representation of adaptive thresholding
64
Figure 4.1 The weld ROI is extracted from the original image
75
Figure 4.2 The weld ROI are scanned line by line as shown by
thegray vertical lines with their corresponding line
profilesplotted. Black and gray crossed-points represent peaksand
troughs, respectively
76
Figure 4.3 The flaw-map of the weld ROI with LI after
beingscanned line by line. Gray circle indicates the locationof
defect LI
76
Figure 4.4 Removing unwanted area in non-weld regions basedon
location points and edges between black and whiteregions
78
Figure 4.5 Comparison of the flaw-maps before and
aftercleansing
79
Figure 4.6 The operation of region growing 80
Figure 4.7 The effect of brightness decrement on the line
profile(a) The line profile of a non-defect line segment (gray
circle) is plotted
(b) The line profile at a brightness value of 396(c) The line
profile at a brightness value of 296 turns
into a straight
81
Figure 4.8 The effect of contrast and brightness decrement on
theflaw map(a) The original flaw map is obtained from the
original
brightness values of 396 and contrast value set at600.
The flaw map generated after(b) the contrast is reduced to 0;
and
(c) the brightness is reduced to 96
82
Figure 4.9 The contrast and brightness values of the weld ROI
aredecreased and a flaw map is generated for each levelof
decrement(a) The flaw-maps of contrast decrement;(b) The flaw-maps
of brightness decrement
84
Figure 4.10 Three line segments are detected from the contrast
andbrightness adjustment operations. However, these linesegments,
i.e. the flaws in the flaw map aboverepresent possible defects or
non-defects in weld ROI
image
86
-
7/31/2019 Development of a Computed Radiography-based
10/39
ix
Figure 4.11 The operation of extracting windowed images
withreference to the respective flaws mapped to theirlocations in
weld ROI image
87
Figure 4.12 (a) Original weld ROI image,(b) The resultant flaw
map after contrast and brightness
adjustment produces 20 line segments,(c) The result of Niblack
thresholding produces 8 line
segments. The gray circle indicates the defect ofLOF
88
Figure 4.13 Two flaw maps are generated based on
thecharacteristics of the defects
89
Figure 5.1 (a) The original weld ROI image of a component(b) The
proposed sub-regions
96
Figure 5.2 The process of obtaining sub-regions from a
ConnectorWeldcomponent
97
Figure 5.3 The process of obtaining sub-regions from a
CoverWelds component
98
Figure 5.4 Interpreted weld ROI image of Connector Weld 103
Figure 5.5 The corresponding flaw map for the component in
Figure 5.4
103
Figure 5.6 The graph of the normalized features from Table
5.2(b) 105
Figure 5.7 Interpreted weld ROI image of Cover Weld 106
Figure 5.8 The corresponding flaw map for the component inFigure
5.7
106
Figure 5.9 The graph of the normalized features from Table
5.7(b) 109
Figure 6.1 The proposed multi-agent system 114
Figure 6.2 A schematic diagram of the defect
classificationsystems
116
Figure A1 FAM fine-tuning process for Connector Weld in
classification of circular defect
141
-
7/31/2019 Development of a Computed Radiography-based
11/39
x
Figure A2 FAM fine-tuning process for Connector Weld
inclassification of line-shaped defect
142
Figure A3 FAM fine-tuning process for Connector Weld
inclassification of multi-defect (line-shaped defect)
143
Figure A4 FAM fine-tuning process for Cover Weld
inclassification of circular defect
144
Figure A5 Figure A5 - FAM fine-tuning process for Cover
Weldinclassification of line-shaped defect
145
Figure A6 FAM fine-tuning process for Cover Weld
inclassification of multi-defect (line-shaped defect)
146
-
7/31/2019 Development of a Computed Radiography-based
12/39
xi
List of Abbreviations
ANN Artificial Neural Network
ART Adaptive Resonance Theory
CR Computed Radiography
CT Computed Tomography
DICOM Digital Imaging and Communications in Medicine
FAM Fuzzy ARTMAP
FE Feature Extraction
GLCLL Gray Level Co-occurrence Linked List
GLCM Grey-Level Co-occurrence Matrix
k-NN k-nearest-neighbor
LI Linear indication
LOF Lack of fusion
LOP Lack of penetration
LTM Long Term Memory
LVQ Learning Vector Quantization
MACS Multi-Agent Classifier System
MAS Multi-Agent System
MLP Multilayer Preceptron
MRI Magnetic Resonance Imaging
MV Majority Voting
NDE Non-destructive Evaluation
NDT Non-Destructive Testing
NDT & E Non-Destructive Testing and Evaluation
PMT photomultiplier tube
POR Porosity
PSL photostimulated luminescence
RBF Radial Basis Function Network
-
7/31/2019 Development of a Computed Radiography-based
13/39
xii
ROI Region of Interest
RT Radiography Testing
STM Short Term Memory
UC Undercut
-
7/31/2019 Development of a Computed Radiography-based
14/39
xiii
PEMBANGUNAN SISTEM PENGECAMAN DAN PENGEKELASAN
KECACATAN KIMPALAN BERASASKAN KEPADA RADIOGRAFI TERKIRA
ABSTRAK
Dalam penyelidikan ini, satu sistem bersepadu yang terdiri
daripada satu peta
kecacatan dan satu pengelas pelbagai rangkaian neural bagi
peruasan, pengesanan
dan pengesanan kecacatan kimpalan telah direkabentuk dan
dibangun. Keberkesanan
sistem yang dicadang dinilaikan dengan menggunakan satu
pangkalan data imej
daripada muncung bahanapi pesawat sebenar. Kecacatan yang
diperiksa termasuk
keliangan, tanda linear, lakuran yang tidak lengkap, kurang
penembusan, dan potong
bawah daripada imej radiograf terkira (CR) muncung bahanapi.
Suatu analisis awal
menunjukkan bahawa ini adalah sukar dengan hanya menggunakan
kaedah
pengambangan adaptif untuk meruas dan mengesan kecacatan
tersebut. Oleh yang
demikian, satu pendekatan peta kecacatan untuk meruang dan
mengesan kedua-dua
kecacatan berupabentuk bulat (keliangan) dan garis (tanda
linear, lakuran yang tidak
lengkap, kurang penembusan, dan potong bawah) telah direka.
Seterusnya ciri-ciri
imej mengandungi penghurai bentuk dan informasi tekstur ditarik
keluar daripada peta-
peta kecacatan untuk mencirikan dan mewakili kecacatan tersebut.
Ciri-ciri imej ini
digunakan sebagai corak masukan kepada sistem-sistem berdasarkan
rangkaian
neural untuk mengelas kecacatan ini. Dua sistem berpelbagai
pengelas yang
direkabentuk berdasarkan kepada satu ensembel daripada
rangkaian-rangkaian neural
Fuzzy ARTMAP (FAM), iaitu (i) satu sistem pengelas berpelbagai
agensi (MACS)
dengan algoritma pasukan timba dan (ii) satu rangkaian mengundi
dengan strategi
pengundian majoriti telah diselidik. Keputusan terbaik adalah
dihasilkan oleh MACS
dengan purata kadar ketepatan pengelasan antara 83%-88%.
Keputusan-keputusan
ini menunjukkan secara positif keberkesanan pendekatan peta
kecacatan dan MACS
yang dicadang dalam pengesanan dan pengelasan kecacatan
kimpalan.
-
7/31/2019 Development of a Computed Radiography-based
15/39
xiv
DEVELOPMENT OF A COMPUTED RADIOGRAPHY-BASED WELD DEFECT
DETECTION AND CLASSIFICATION SYSTEM
ABSTRACT
In this research, an integrated system consisting of a flaw map
and a multiple
neural network classifier for weld defect segmentation,
detection, and
classification is designed and developed. The effectiveness of
the proposed
system is evaluated using an image database of real aircraft
fuel nozzles. The
defects examined include porosity, linear indication, lack of
fusion, lack of
penetration, and undercut, from computed radiography (CR) images
of the fuel
nozzles. An initial analysis shows that it is difficult to use
the Niblack adaptive
thresholding method alone to segment and detect the defects. As
such, a flaw
map approach to segment and detect both circular (porosity) and
line-shaped
(linear indication, lack of fusion, lack of penetration, and
undercut) defects is
devised. Image features comprising shape descriptors and texture
information
are then extracted from the flaw maps to characterize and
represent the defects.
The image features are used as input patterns to
neural-network-based systems
for defect classification. Two multi-classifier systems,
designed based on an
ensemble of the Fuzzy ARTMAP (FAM) neural networks, are
investigated, i.e.,
(i) a multi-agent classifier system (MACS) with the bucket
brigade algorithm and
(ii) a voting network with the majority voting strategy. The
best results are
produced by the MACS with average classification accuracy rates
between
83%-88%. These outcomes positively demonstrate the effectiveness
of the
proposed flaw map approach and the MACS for weld defect
detection and
classification.
-
7/31/2019 Development of a Computed Radiography-based
16/39
1
CHAPTER 1
INTRODUCTION
1.1 Background of Research
Welded components and structures are widely used in almost
all
industries. With the awareness of the fact that weld is the
weakest link in a
component, and most failures of components are related to weld
and weldment
performance, fabricating welded components with high quality and
ensuring
their performance and reliability in service is critical. In
this regard, various non-
destructive testing (NDT) techniques have been developed to
assess the weld
quality without destroying the welded components.
Non-Destructive Testing and Evaluation (NDT & E) plays a
crucial role in
ensuring the reliability and performance of welded components.
The NDT
methods are able to verify the structural integrity and
compliance to the
standards by examining the surface and subsurface of the welded
parts as well
as the surrounding base metal (Hayes,1998). These methods are
required to
obtain the necessary information for evaluating the welds. The
advantage of
these methods is that an object can be examined without
destroying its
structures. Non-destructive Evaluation (NDE) can be conveniently
applied for
ensuring that the weldments are fit for the purpose. NDE places
due emphasis
on characterization of microstructures, residual stresses, as
well as quantitative
determination of size, shape, and location of a defect or
anomaly. As such,
evaluation of structural integrity of a welded component is
ensured (Baldev et al.,
2000).
-
7/31/2019 Development of a Computed Radiography-based
17/39
2
The technology of NDT of welds has evolved rapidly during the
past few
years. The methods normally used to examine the welds in NDT are
visual,
radiographic, ultrasonic, magnetic, penetrant, and electrical
methods
(Halmshaw, 1996). Among the various NDT techniques, radiography
testing
(RT) is often adopted in many industries to assess the weld
quality by
evaluating the radiographs of the welded components by a skilled
inspector. RT
has the capability of exposing internal defects in testing a
wide variety of
materials ranging from light elements such as aluminium,
beryllium, magnesium,
to steel, nickel, and other heavy elements (Baldev et al.,
2000).
In RT, a gamma-ray or X-ray beam is transmitted from the
radiation
source. The gamma-ray or X-ray penetrates through the welded
part. Different
level of absorption takes place in the defective part and the
surrounding metal,
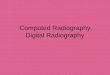
depending upon the material used (Ditchburn et al., 1996). A
photographic
record of the transmitted energy, which is called a radiograph,
is produced
based on different degrees of penetration of the radiant energy
in the welded
part, as shown in Figure 1.1. When less absorption happens owing
to the thin
section of the metal, dark regions occur in the radiograph where
more
penetration of the rays takes place. This phenomenon normally
happens in the
weld which has voids, such as porosity and cavities. On the
other hand, thicker
areas or higher density material absorb more radiation, and
their corresponding
areas on the radiograph are lighter such as metal inclusion in
the weld. The film
is developed and treated with chemical components in a darkroom
before the
-
7/31/2019 Development of a Computed Radiography-based
18/39
3
radiograph of the weld interior can be inspected clearly using
an illumination box
(Bryant et al., 1989).
Figure 1.1 Development of weld radiograph in radiography
systems
(Hayes, 1998).
The development of Computed Radiography (CR) has improved
the
conventional RT to a filmless testing method. CR uses very
similar equipment
as those of conventional RT. An imaging plate is used in place
of a film to
create the weld radiograph. The imaging plate contains
photostimulable
storage phosphors, which store the radiation level received at
each point in local
electron energies (Rowland, 2002). When the plate is put through
the scanner,
a scanning laser beam causes the electrons to relax to lower
energy levels,
emitting light that is measured to compute the digital image.
Imaging plates can
Film
Radiation source
Specimen
Void
Dark Area Dark Area Light Area
-
7/31/2019 Development of a Computed Radiography-based
19/39
4
be re-used by exposing the plate to a room-level fluorescent
light to erase the
image inside. The imaging plate is run through a computer
scanner to read and
digitize the image (Deprins, 2004). The image can then be viewed
and
enhanced using software that has functions very similar to those
of the
conventional image-processing software, such as contrast,
brightness, and
zoom.
In both RT and CR methods, the produced radiography is inspected
by a
trained NDT inspector. A decision is then made on the
acceptability of the
component or object under test. As such, the NDT interpreter
must have a
thorough understanding on the weld process and the associated
flaws as well
as the acceptance criteria as specified in the reference codes
and standards
(Liao and Ni, 1996).
Since the evaluation of radiographs by human inspectors
remains
subjective and inconsistent, computer-aided systems for
automatic
interpretation of radiographs have attracted a lot of research
interest. The main
function of computer-aided systems is to detect defective areas
in the internal
parts of a weld and to classify the defects accordingly with
less human
involvement. In the following sections, a brief overview of
automatic defect
detection methods of weld radiograph is presented. Next, the
main problems of
the existing methods in defect detection of weld radiographs are
explained.
Then, the research objectives and research scopes are defined.
This is
followed by a discussion on the research approach adopted. The
thesis outline
is presented at the end of the chapter.
-
7/31/2019 Development of a Computed Radiography-based
20/39
5
1.2 An Overview of Weld Defect Detection and Classification
In general, weld radiographs are inspected by a trained
inspector using
visual acuity. The interpretation of the radiograph is very much
depends on the
knowledge and experience of the inspector. Human interpretation
of radiograph
is a difficult and tedious task especially when there are a
large number of
defects to be checked. Moreover, different interpreter may have
different
opinion on a given radiograph (Nockeman et al., 1991). Even the
same
interpreter sometimes may have a different opinion at different
time (Kaftandjian
et al., 1998). As such, the interpretation result is pretty
subjective and uncertain
(Fucsok and Schaimach, 2000).
Use of an automated interpretation software is more reliable as
its
decision is not dependent on subjective factors, such as
tiredness after a long
period of interpretation. Therefore, the development of
automated interpretation
systems for weld radiograph inspection grows rapidly over the
past decade.
With the advancement of computing power and digital image
processing,
automated interpretation systems with functions of film
digitization, image pre-
processing, weld area localization, defect segmentation
detection, and defect
classification are made possible (Khalid et al., 2000).
In digitization, the weld radiographs are digitized using image
capturing
devices such as a scanner or a camera with an illumination box
beneath. The
captured image is then loaded into a computer. The digitization
process
converts the information from a weld radiograph into a digital
format with
-
7/31/2019 Development of a Computed Radiography-based
21/39
6
different levels of gray values. Some of the defects such as
incomplete
penetration and porosity normally appear darker than the
background in the
digitized weld image (Hayes, 1998). Other defects, such as metal
inclusion,
appear brighter as compared with the background.
On the other hand, Morro et al. (2004) has described the use of
CR
technology as a direct replacement for radiographic film. The
digitization
process is not required as images can be obtained directly in
computer image
format. Using the information obtained from the images, further
processing is
carried out to improve the image quality such as contrast
enhancement, noise
elimination and shading correction (Nacereddine et al., 2004).
Therefore, the
CR technology with an automated interpretation system makes the
inspection
process faster and more reliable.
In defect detection and classification, weld defects that exist
in the
digitized image need to be identified. Normally, a number of
features such as
area, compactness, length, breadth, elongation, mean pixels, and
central
moment are quantitatively measured, and they are classified
according to their
types (Feher, 2001). This classification stage often involves
feature extraction
and a detailed pattern analysis routine. Currently, artificial
intelligence methods
such as artificial neural network (ANN) and fuzzy system have
been actively
used in the decision making of weld defect classification tasks
(Lashkia, 2001;
Wang and Liao, 2002; Silva et al., 2004).
-
7/31/2019 Development of a Computed Radiography-based
22/39
7
1.3 Problem Statement
In general, automatic defect interpretation of weld radiographs
consists of
five stages, i.e., image digitization, pre-processing, weld
extraction, defect
segmentation, and defect classification (Khalid et al., 2000).
However, digitized
radiographic images are often corrupted by non-uniform
illumination, contain
noise, and have low contrast levels (Lashkia, 2001). These
undesirable factors
caused the research of automated defect detection of weld
radiograph to focus
on pre-processing and defect segmentation and to improve the
image quality so
that a better visibility of the defects on the image can be
produced. The
interpretation of weld quality, however, is still carried out
manually by referring
to the processed image.
The development of CR has brought X-ray imaging to a new era of
digital
filming as well as inspection. The NDT interpreter no longer
needs to place the
radiographic film on a illuminator and vary the intensity of the
light source. The
inspection is done by viewing the computed radiograph in a
computer monitor
and using an imaging software to adjust the contrast and
darkness levels to
expose the defects. More defects can be exposed using the
features in the
imaging software such as image enlargement, cropping,
enhancement,
measurement, etc. Nevertheless, the required knowledge and
experience of
NDT interpreters is regardless of digitized or computed
radiographs.
As such, much research has been conducted to further automate
the
interpretation of weld radiographs by developing automated
defect detection
and classification systems (Khalid et al., 2000; Sofia and
Redouane, 2002;
-
7/31/2019 Development of a Computed Radiography-based
23/39
8
Nacereddine and Tridi, 2005). Although work related to automate
defect
detection from digitized radiographs has been carried out, the
detection and
classification of multiple defects from a single image has not
been addressed
widely. Besides that, these areas of work are mainly based on
digitized
radiographs, and not on CR images.
From the literature review, there is a lack of past research
regarding the
investigation of suitable characterization features for each
defect type. In other
words, the features which have been used in the classification
process are not
subjected to a detail investigation of their suitability to
identify certain defect
types (Bonser and Lawson, 1998; Wang and Liao, 2002; Mery and
Berti, 2003)
or small defects (Mery et al., 2002; Sun et al., 2005). Besides
that, the intensity
plot of the weld in the digitized images (Wang and Liao, 2002;
Mery and Berti,
2003) normally are treated as a Gaussian curve, which may not be
the case in a
lot of radiographs. Both the limitations lead the classification
system to yield
lower classification accuracy rates that are yet to achieve the
optimal outputs in
weld defect detection and classification.
Classification of weld defect types is an important issue. This
is because
the defect detection process alone is not sufficient to assess
the weld quality
automatically. As a result, a skilled NDT inspector is needed to
interpret the
radiograph. Furthermore, the occurrences and statistics of
different defect
types reflect different problems in the welding process. If root
causes of
different defect types can be identified in the early stage,
then the process can
be halted before more defects are produced. However, not much
work has
-
7/31/2019 Development of a Computed Radiography-based
24/39
9
been done in the past in discriminating different types of weld
defects. Recently,
several authors (Aoki and Suga, 1999, Wang and Liao, 2002) have
shown
interest in classifying defects using artificial neural network
(ANN). However,
most of the work focuses on the Multi-Layer Perceptron model,
and other ANN
models are not studied. Furthermore, a single ANN model may not
be able to
overcome the problem of detecting multiple defects in
radigoraphs.
This research undertakes a detailed study of the existing
techniques and
algorithms used in image processing of CR. More importantly, by
emulating the
interpretation process of the NDT inspector, a defect detection
and classification
system that can segment the defects from weld images with
non-Gaussian
intensity profile automatically and classify the multiple
defects from a single CR
image into different categories has been designed and developed.
In addition,
the defect classification system is developed based on the
combined predictions
from a multi-classifier model devised using the ANN
technology.
1.4 Research Objectives
The main aim of this research is to design and develop an
automatic
defect detection and classification system that is able to
detect and classify
multiple defects in CR images. The specific research objectives
are as follows.
(a) To collect a set of real CR images and generate a database
of weld ROI
images for analysis using image processing techniques.
(b) To investigate the use of gray level thresholding to process
the whole
weld radiographs and to develop defect segmentation using
adaptive
thresholding from the ROI images.
-
7/31/2019 Development of a Computed Radiography-based
25/39
10
(c) To develop a flaw map approach for detecting weld defects
from the ROI
images
(d) To identify shape descriptors and texture features to
characterize and
represent the weld detects
(e) To develop a semi-automatic defect classification system
based on a
neural-network-based multi-classifier system to detect and
classify the
weld defects
1.5 Research Scope and Approach
This research is focused on the development of an automated
defect
detection and classification system which consists of image
pre-processing,
weld extraction, defect segmentation, and defect classification.
The weld
radiographs used in developing the classification system
consists of real fuel
nozzles CR images collected from an aerospace servicing company.
The weld
defects investigated include porosity, linear indication, lack
of fusion, lack of
penetration, and undercut. The entire defect defection and
classification system
is developed in MATLAB 7.0.4.
The images used in this research comprise real CR images of fuel
nozzle
components from an aerospace service company. First, the weld
ROI image is
aligned and extracted from the whole image using gray level
thresholding. The
extracted ROI image is then segmented using background
subtraction and
adaptive thresholding. This step, which serves as an initial
attempt to detect
weld defects in CR images, is necessary so that effort can be
focused on
-
7/31/2019 Development of a Computed Radiography-based
26/39
11
processing and analysing weld regions, and not on the non-weld
regions. The
Niblack thresholding method along with background subtraction
are studied
As explained in the problem statement, there is a lack of work
in
emulating the interpretation process of the NDT inspector in
examining the weld
defects while taking the advantages of CR technology. In order
to extract
relevant features from the image database, a review of the flaw
map approach
(Liao and Li, 1998) is conducted, and a revised flaw map is
developed to
emulate the interpretation process of the NDT inspector. Then,
shape and
texture descriptors are extracted to define the flaws. Unlike
most published
work that focuses on the Multilayer Preceptron (MLP) neural
network, the Fuzzy
ARTMAP (FAM) neural network is studied in this research for
defect
classification. The classification system is first developed
based on a single
FAM, and the efficiency is assessed using features extracted
from the flaw map.
Then, a multi-agent classifier based on a pool of FAM networks
combined with
the bucket brigade algorithm is applied for defect
classification. The
classification accuracy rates are analysed, discussed, and
compared with those
from a pool of FAM networks combined by using the majority
voting strategy.
1.6 Thesis Outline
This thesis is arranged in accordance with the objectives as
mentioned in
Section 1.4. Chapter 2 reviews various automated weld defect
detection and
classification methods. A thorough discussion on the advantages
and
limitations of the existing approaches for automated defect
detection and
classification is provided. In Chapter 3, a weld extraction
methodology based
-
7/31/2019 Development of a Computed Radiography-based
27/39
12
on gray level thresholding is firstly developed to extract the
weld part from the
whole CR image. This is followed by the weld defect segmentation
process
using the Niblack adaptive thresholding technique.
Chapter 4 discusses the flaw map approach to extract weld defect
from the
Region of Interest (ROI) images. Chapter 5 describes the
features used to
characterize the segments extracted from the flaw map. Chapter 6
details the
development of a multi-agent classifier system using a pool of
FAM neural
networks, whereby the predictions from multiple FAM networks are
combined by
using the bucket brigade algorithm. Conclusions and suggestions
for further
work related to this research are drawn and presented in Chapter
7.
-
7/31/2019 Development of a Computed Radiography-based
28/39
-
7/31/2019 Development of a Computed Radiography-based
29/39
14
implemented in NDT inspection applications. More and more
applications can
be covered by the improving image quality of digital radiography
systems
(Deprins, 2004).
In this research, the investigation is focused on CR images. In
CR, an
imaging plate (IP) containing the storage phosphor is positioned
in a light-tight
enclosure, exposed to the x-ray image and then read out by
raster scanning
with a laser to release the photostimulated luminescence (PSL).
This results in
the emission of shorter wavelength (blue) light in an amount
proportional to the
original x-ray irradiation. The blue PSL light is collected with
a light guide and
detected with a photomultiplier tube (PMT). The PMT signal is
digitized to form
the image on a point-by-point basis (Fujita et al., 1989). X-ray
absorption
mechanisms are identical to those of conventional phosphor
screens used with
film. They differ in that the useful optical signal is not
derived from the light
emitted in prompt response to the incident radiation, but rather
from subsequent
emission when the latent image, consisting of trapped charge, is
optically
stimulated and released from metastable traps (Rowlands, 2002).
Imaging
plates can be re-used for a certain periods and images can be
viewed in a few
minutes comparing to the exposing process of photographic films
as well as
saved images in storage media rather than keeping films in
achieved box.
CR images usually are saved in DICOM (Digital Imaging and
Communications in Medicine) format as set by the CR system,
owing to the
advantages as stated in DICOM standard (The DICOM standard,
2006).
Nowadays, most of the created DICOM images are saved in 16 bit
grayscale
-
7/31/2019 Development of a Computed Radiography-based
30/39
15
format to allow better enhancement during inspection process
although there
are DICOM images in 8-bit and 12-bit grayscale formats.
Wtih CR, the NDT interpreter examines radiograph image on a
computer
monitor using an imaging software. Visualization in CR is made
easy and
reliable with the availability of image enhancement, enlargement
and
measurement tools in the imaging software. In addition,
comparing CR and film
(or digitized images from files), the details of pixel
information in CR images
allow the NDT interpreter to expose more defects and confirm
non-defects in an
attempt to reduce the false alarm rate. During inspection, the
NDT interpreter
needs to decide the quality of weld based on individual's
interpretation skills,
knowledge, and experience.
2.3 Weld Defect Detection and Classification System
The use of CR in NDT applications has become popular with the
growth
of higher computing power as well as larger storage media, such
as hard disk
and DVD (Deprins, 2004). However, the interpretation skills and
knowledge on
the digitized or CR remain the same. Human interpreters are
still the decision
maker of the weld quality. In the past years, both film and
real-time radiography
relied on human experts to perform manual interpretation of
images (Liao and Li,
1998). Nowadays most inspections are still done by human experts
in
manufacturing plants but with the assistance of more advanced
software tools,
particularly image processing to enhance, enlarge the ROI in
radiograph with
the objective of exposing defects. Although manual
interpretation is a cost
effective method, the assessment of radiographic films by human
interpreters is
-
7/31/2019 Development of a Computed Radiography-based
31/39
16
sometime difficult and subjective when a great number of films
are to be
interpreted (Kaftandjian et al., 1998). A survey conducted by
volunteers in
laboratories from Croatia, Hungary and Poland regarding the NDT
reliability of
routine radiographic film evaluation by human inspectors showed
that
experience and education play significant roles in the
evaluation of radiographs
(Fucsok and Scharmach, 2000).
2.3.1 Weld Extraction and Segmentation
Weld extraction is usually the first step in the development of
defect
detection and classification systems for weld radiographs. A
weld region may
have several appearances in a radiograph depending on the joint
types used,
such as butt joint, T-joint, corner joint, lap joint and edge
joint (Bryant et. al.,
1989). The discontinuities in weld are normally subjected to
various types of
defects owing to the improper welding techniques. Lawson and
Parker (1994)
described an intelligent system for segmenting defects for
quality evaluation,
where the inspection of welded structures normally focuses
within the weld area.
Hence, extraction of welded components from the whole
radiographs is an
important step to reduce processing time and the false alarm of
flaws which
appear outside the weld region and ROI.
There have been studies on the development of algorithms to
extract
welds and to identify anomalies in the weld regions. Lawson and
Parker (1994)
developed a weld segmentation algorithm with back propagation
MLP neural
network as the first stage of defect detection in the weld. In
Kaftandjian et al.
(1998), background subtraction and histogram threshold were
performed to
-
7/31/2019 Development of a Computed Radiography-based
32/39
17
segment the defects from the background. However, false alarm
happened
owing to the small background regions and noise beside the
actual defects. A
real-time automatic detection system of weld defects was
established by Sun et
al. (2005). The minimum size of defects was 0.4 mm but the weld
size of the
defects was very large. When the above technology was adopted to
detect the
smaller defects in complex structures, false detection could
happen.
In Mery and Filbert (2002), an automated flaw detection method
in
aluminum castings based on the tracking of potential defects in
a radioscopic
image sequence was presented. Special filtering and masking were
used to
segment the casting defects, and the casting defects in aluminum
wheels were
extracted by using the software PXV 5000. In addition, the
defects detection
algorithm could eliminate the false detection rates without
discriminating the real
flaws based on the multiple view geometry. However, the above
researches
were mainly done to detect relative larger defects. So, there
are some
limitations when using the methods to detect the small defects
in complex
structures, and this is the focus of this research.
Liao and Ni (1996) proposed a weld extraction method based on
the
observation of the intensity plot where the plot of a weld
appeared more like
Gaussian curve than the other objects in the image. The
algorithms basically
consisted of various steps including dividing image into
sub-images, detecting
peak and trough as well as similarity computation, slopes
calculation and
maximum weld finding in line extraction. The methodology was
found to have
100% accuracy with 25 images used. Liao and Tang (1997) applied
the
-
7/31/2019 Development of a Computed Radiography-based
33/39
18
multilayer perceptron (MLP) neural network to extract and
represent welds.
Four features were extracted from Gaussian intensity plot,
i.e.,peak position,
width, mean square error between the object and its Gaussian
intensity plot,
and the peak intensity. The methods of using the characteristics
of Gaussian
profile to extract weld region (Liao and Ni, 1996, Liao and
Tang, 1997, Liao et
al., 2000) have a major drawback, that is, the method is only
limited to weld
image which has similar intensity line profile to the Gaussian
bell shaped profile.
For other variation of intensity profiles which is non-Gaussian
line profile, the
methodology will not work. Furthermore, most weld radiographs
have different
shapes for the intensity line profile owing to the image
quality. As such, in this
research, an effective weld extraction method based on the
intensity line profile
or gray level line profile of the image is proposed.
2.3.2 Defect Detection
Much effort has been made to automate the process of defect
segmentation and detection with the assistance of digital image
processing
techniques. Segmentation of weld defects is the most crucial
part in defect
detection to ensure defects do not escape from the segmented
image. In
addition, radiographic images often contain noise. Inappropriate
techniques
may lead to the escape of defects. Extensive work has been
carried out by a lot
of researchers using various techniques and approaches, as
reviewed in the
following section.
With the advancement of artificial intelligence, several
researchers used
artificial neural network (ANN) in defect segmentation. Liao et
al. (1999)
-
7/31/2019 Development of a Computed Radiography-based
34/39
19
presented a flaw detection methodology, based on fuzzy
clustering methods, to
process the weld image line by line. By fitting the curve using
B-spline, gray
level profiles were plotted with the aim to smoothen the noise
level. For each
line, 25 features were extracted from the above mentioned
profile. Two fuzzy
systems were compared, namely fuzzy k-nearest neighbour (k-NN)
algorithm
which assigned class membership to sample a vector and, Fuzzy
c-means
algorithm that considered all the samples in the universe
belonging to a certain
class but with different membership. The algorithms were tested
on 18 weld
segments taken from 9 different weld images. It was found that
the the fuzzy k-
NN classifier outperformed the fuzzy c-means algorithm with the
best results of
6.01% missing rate and 18.68% false alarm rate. The proposed
method,
however, assumed a defect-free profile to have a symmetrical
appearance,
which was similar to the assumption that the profile is
approximately Gaussian.
This limitation is the same as in the work by Liao and Ni
(1996), Liao and Tang
(1997) and Liao et al. (2000).
A segmentation method was developed by Lawson and Parker
(1994)
using the backpropagation network. The network was trained based
on a set of
image segmented by Kehoes (Kehoe and Parker, 1992) adaptive
thresholding
method. To train the network, an NxN window was specified and
moved across
the image in a raster fashion as the input and the desired
output is referred to
the pixel in the thresholded image. A total of 50,000 random
sets of windows
were chosen to train the network. The investigation found that
the window size
must be larger than 9x9 to ensure convergence. The output of
image was then
-
7/31/2019 Development of a Computed Radiography-based
35/39
20
binarized using simple rules. The approach outperformed the
original Kehoes
method, where the latter had the tendency to produce false
signals.
Lashkia (2001) proposed a detection algorithm based on fuzzy
reasoning
to detect low contrast defects using local image
characteristics, such as spatial
contrast, spatial variance and distance between two contrast
regions. The
proposed method evaluated the object fuzzy membership value for
each pixel,
and pixels with high membership were detected as defects
regions. A region
growing method was used to extract the position and shape of
defects. The
reliability test was based on 117 weld radiographs with typical
defects, e.g.
longitudinal and transverse cracks, lack of fusion, incomplete
penetration, blow
hole and slag inclusions. Visual evaluation by interpreter
yielded 181 defects
whereas the algorithm successfully detected 177 defects.
However, 35
misinterpretations occurred owing to the recognition of small
noise regions. In
addition, some small defects which were located near the dark
boundaries
would not be detected. Thus, the method was sensitive to noise
in images as
well as in detecting small defects near the dark boundaries.
Background subtraction methods have been used a lot in
defect
segmentation. In background subtraction, the background image is
first
estimated from the original image (Russ, 1999). This estimated
background is
then subtracted from the original image to obtain a resultant
image which has
high illumination gradient of defect. This technique is
effective in segmenting
image with non-uniform illumination. Daum et al. (1987)
estimated background
function using spline approximation. According to them, defect
indications in
-
7/31/2019 Development of a Computed Radiography-based
36/39
21
the image could be characterized by high spatial frequencies
while normal
welding bead and its surrounding caused gradual gray level
changes with low
spatial frequencies. However, the algorithm developed was found
to be difficult
in detecting small defect sizes. Hyatt et al. (1996) proposed a
segmentation
technique using the multi-scale method where the defects were
segmented from
background image to remove the background while preserving the
defective
area.
Besides that, Aoki and Suga (1997) presented a background
estimation
methodology using the special point connecting method. In this
method, low
brightness areas in the distribution were supplemented where the
alleys or gaps
within the brightness distribution of horizontal profile were
filled up. The image
was then subtracted with this estimated background.
Bonser and Lawson (1998) combined two 5X5 filter masks to
detect
different appearance of weld defects, namely Laws E5S5 filter
and horizontal
Kirsch filter. The Laws filter was used owing to its capability
to accentuate 'spot'
or 'blob' type defects (such as porosities and cavities) whereas
Kirsch filter was
more suited to detect longitudinal defect types (such as cracks,
lack of
penetration and slag inclusions). The resultant image was
subjected to a
standard deviation operator for segmentation of suspected defect
areas. The
detection of false alarms was found to be low, typically with a
few very small
isolated groups of pixels which could be ignored owing to their
small size. They
concluded that filtering approach was more reliable to low
contract images but
less sensitive to small defects.
-
7/31/2019 Development of a Computed Radiography-based
37/39
22
Adaptive thresholding is a conventional segmentation method
in
extracting object from the background of the image. Different
from Otsus
thresholding method (1979), variable thresholds are used in
which the threshold
value varies over the image as a function of local image
characteristics (Sonka
et al., 1998). For each pixel in the image, a threshold has to
be calculated. If
the pixel value is below the threshold, it is set to the
background value.
Otherwise, it assumes the foreground value. Kehoe (1990)
developed an
approach based on the scanning of a predefined window over the
image and
calculated variance and gradient properties within the window.
Classification
was made on the center of the pixel to categorise defects or
non-defects based
on these window properties. In another work, Kehoe et al. (1989)
adaptively
enhanced the contrast image using the same idea of a predefined
window
where the pixel in the center was transformed based on the
variance and
gradient properties in the window over the image. Window sizes
between 5 and
10 were found to give good result.
Palenichka and Alekseichuk (1999) presented flaw detection
in
radiographic images using structure-adaptive binary
segmentation. The method
considered was based on local binary segmentation. A model based
approach
which exploited multi-scale morphological object representation
was used. It
allowed a quick location of local objects with different sizes.
Local binarization
on the greatest, medium and lowest scale yielded the weld seam,
the details of
weld seam, and relevant defects respectively. However, the
method was limited
to a certain number of defect types.
-
7/31/2019 Development of a Computed Radiography-based
38/39
23
The main advantage of using adaptive thresholding is that no
prior
knowledge of the defect characteristics is needed, and it can be
applied to any
possible defects despite their sizes and shapes (Lawson and
Parker, 1994). In
addition, this method is less sensitive to non-uniform
illumination appearance in
the image as the method segments the image based on the local
characteristics
from the image.
Alaknanda and Kumar (2005) presented an approach to process
radiographic weld images, where by the Canny operator was
applied to
determine the boundaries of the flaws after choosing an
appropriate threshold
value. The boundaries were then fixed using a morphological
image processing
approach, i.e. dilating few similar boundaries and eroding some
irrelevant
boundaries decided on the basis of pixel characteristics.
Finally the defects
detected by this approach were categorized according to their
properties, such
as porosity appeared as rounded contours having dark shadows,
undercut as
line broad and diffused along the edge of weld, lack of fusion
as thin line along
the edge of weld but might be wavy and diffuse depending upon
the orientation
of defect with respect to the X-ray beam, incomplete penetration
as edge line in
the middle of weld.
In Liao and Li (1998), a flaw detection methodology was
developed
based on the observation that the overall line profile of a good
weld
(perpendicular to the weld direction) had a bell shape with some
degree of local
variation. A weld flaw resulted in a disruption of the bell
shape. The profile
-
7/31/2019 Development of a Computed Radiography-based
39/39
anomalies caused by weld flaws could be classified into three
categories: peak,
trough, and slant-concave. These profile anomalies were
peak-anomaly, trough-
anomaly, and slant-concave-anomaly, respectively. Wtih weld
images from
Liao and Ni (1996), the images were firstly scaled and followed
by background
removal based on a threshold value. The threshold value was
chosen by
observing the histograms of the scaled images. Once the
background was
removed, the line image was scaled back for the subsequent
processing
operations. Dark image enhancement was then applied on these
images
because the signal-to-noise ratios in different line images
differ considerably.
The line images were finally normalized to ensure its maximum
gray level is
maintained. The spline curve fitting algorithm was used to
reduce and smooth
the line profiles. The smoothness of the fitted curve was
controlled by changing
the smoothing factor. The line profiles were plotted in a flaw
map by processing
the intensity of radiograph images line by line. The anomalies
above were then
detected by observing their corresponded characteristics to the
defects. The
methodology was tested with 24 weld images which contained 75
flaws of
various kinds. Five flaws, which were mainly small porosities
and might be
acceptable according to the codes for pressure vessels, were
missed. The
successful defect detection rate was 93.3%. The false alarm rate
was 4.2%,
which was mainly caused by the lack of fusion defects or very
noisy profiles
having non-Gaussian characteristics. Liao and Lis methodology
were
dedicated to Gaussian shape of weld profiles, and their flaw map
was dedicated
to a single-thresholded image.