Embed Size (px)
Citation preview

1066 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. CAS-25, NO. 12, DECEMBER 1978
Syst., vol. CAS-22, pp. 246-251, Mar. 1975. [ 111 -, “Limit cycle oscillations in a cascade of two-dimensional
[ 151 -, “Some general properties of signal-flow networks,” in
digital filters,” IEEE Trans. Circuits Syst., vol. CAS-22, pp. 826- Network and Signal Theory, J. K. Skwirzynski and J. 0. Scanlan, Eds.
830, Oct. 1975. London, England: Peter Peregrinus Ltd., 1973, pp. 48-59.
[12] T. L. ,Fhang, “Limit cycles in a two-dimensional first-order digital y;lt; IEEE Trans. Circuits Syst., vol. CAS-24, pp. 15-19, Jan.
+ [13] A. Fettweis, “Pseudopassivity, sensitivity and stability of wave
digital filters,” IEEE Trans. Circuit Theory, vol. CT-19, pp. 668- 673, Nov. 1972.
[ 141 ?, “Realizability of digital filter networks,” Arch. Elektr. Alfred Fettweis (M’56-SM’62-F’75), for a photograph and biography Ubertrag., vol. 30, pp. 90-96, Feb. 1976. please see page 950 of this TRANSACXONS.
Design of Two-Dimensional Recursive Digital Filters
KOTARO HIRANO, SENIOR MEMBER; IEEE, AND J. K. AGGARWAL, FELLOW, IEEE
Ahtract-The present paper develops a design technique for approxi- mating nonseparable frequency characteristics by sums and products of separable transfer functions. Tbis approximation is called the “piecewlse separable” decomposition of the characteristic. In the design technique, the desired filter with half-plane symmetry (radial symmetry) is obtained by shifting a low-pass cbaracterlstlc in tbe frequency domaio, aud by combm- ing these shifted characteristics. Also the paper includes design approaches for the four-quadrant symmetry fiIters. Two examples illustrate the tech- nique of the paper.
I. INTRODUCTION
T HE GROWTH of design techniques for two-dimen- sional recursive filters has suffered from the inability
to factor polynomials in two or more variables into lower order polynomials, in general. This difficulty has been circumvented in a variety of manners, and this has led to several design procedures. These are briefly discussed in the following.
The design procedure of Shanks, Treitel, and Justice [l] consists in considering a transfer function in the analog frequency domain, rotating the axes, and applying the bilinear transformation to obtain a two-dimensional re-
Manuscript received January 3, 1978; revised July 31, 1978. This research was supported in part by NSF under Grant ENG74-0496 and by JSEP AFOSR under Contract F49620-77-C-0101.
K. Hirano is with the Department of Electronics Engineering, Kobe University, Rokko Nada, Kobe, Japan.
J. K. Aggarwal is with the Department of Electrical Engineering, The University of Texas at Austin, Austin, TX 78712.
cursive digital filter. It may be added that, in general, the starting point is a separable filter and the stability of the resulting filter is not guaranteed even if the prototype filter is stable. A technique similar in character but rotat- ing axes in digital frequency domain ((z,,z,)-domain) has been given by Chang and Aggarwal [2]. Here the rotation is accomplished through the introduction of rational powers of z, and z2, and the interpolation of input and output sequences. In this technique, the resulting filter is stable if the prototype filter is stable. Further, the distor- tion, a consequence of the bilinear transformation, is absent in the resulting filter when compared with Shanks et al.‘s filter. A general form of spectral transformation is accomplished by Pendergrass, Mitra, and Jury [3], through the use of transformation functions. The transfor- mation has the flavor of conformal mapping and pre- serves stability. The underlying philosophy common in the above mentioned papers consists in starting with proto- type filters, the stability properties of which are discussed simply, and then transforming them to obtain the desired filters.
A different design procedure, proposed by Manry and Aggarwal [4], is based upon the implementation of a two-dimensional recursive filter using a one-dimensional recursive filter. Mersereau and Dudgeon [5] have devel- oped this idea into a design procedure for two-dimen- sional recursive filters. Here again, the difficulty is re-
0098-4094/78/1200-1066$00.75 01978 IEEE

HIRANO AND AGGARWAL: TWO-DIMENSIONAL RECURSIVE DIGITAL FILTERS 1067
duced to a case in one dimension, where problems be- come much simpler.
Several other authors have suggested alternative tech- niques including the ones by Treitel and Shanks [6], Costa and Venetsanopoulos [7], and Maria and Fahmy [8]. However, it appears that a general technique is lacking. It is hoped that the present paper will fill this vacuum. Results include the design procedure whereby a given filter characteristic is realized using separable filters.
The following observations are provided to make the design issues clear.
a) Separability. A filter transfer function H(z,,z,) is separable if it can be expressed as H,(z,)HZ(zJ, and nonseparable if not.
b) Four-quadrant symmetry. This property refers to the equality
I~(zA= IfwJJ = le,J:)l= Iff(Z1;~Z2*)I (1) where * denotes the complex conjugate. Note that for lz,l=l and ]z2]=1, zF=z;’ andz;=z;‘.
c) Half-plane symmetry. This property refers to the equality
IfGJJI = lfwA)l~ (2)
It may be emphasized that separability of the filter H(z,,zJ into the form H,(zJH2(z2) implies four-quadrant symmetry but a nonseparable filter may exhibit four- quadrant symmetry in its characteristic. This important observation is borne out by the following example. The filter with the transfer function H,(z,)H,(z;‘) + H2(zJH2(z; ‘) has four-quadrant symmetry but in gen- eral, it is nonseparable. The symmetry condition of (2) is a consequence of the realness of the impulse response of the filter. In fact, this is the only condition imposed upon the specification of the filter characteristic in the present paper. It may be observed that the half-plane symmetry does not imply four-quadrant symmetry.
In view of the above observations, it is the feeling of the authors that it is the characteristic that is important. The objective is to find a stable filter which satisfies the specification under the given constraints. In the proposed procedure, the characteristic is realized by a combination of separable filters, independent of whether the character- istic satisfies the four-quadrant symmetry or half-plane symmetry. The basic assumption being made is that all the data (input sequence) are available, and that they may be filtered along various recursion directions. This is not an unreasonable assumption since these filters are used in the processing of pictures and other similar data. Further, the characteristic may be specified by giving pass- and stopbands or by tabulating the values of the transfer characteristic at a preassigned set of frequencies. Both types of specifications will be discussed. The design proce- dure of the present paper may be termed as the “pie&wise separable” method.
The use of two-dimensioinal four-quadrant symmetric filters is fairly well documented in the literature. They are used in applications where there is no preferred direction
Fig. 1. Two-dimensional filter derived by the combination of two one-dimensional filters.
in the image or data. However, if one is interested in a particular direction in the image or data, the use of half-plane symmetric filters is imperative. Applications arise in several important areas.
II. DESIGN OF FOUR-QUADRANT SYMMETRY FILTERS
In this section, two techniques for deriving two-dimen- sional transfer functions with four-quadrant symmetry are outlined for different types of specification of the transfer characteristic,. The first one uses the characteristic speci- fied by giving pass- and stopbands in a combination of rectangular domains, and the second one approximates the transfer function from the values of the transfer char- acteristic at a preassigned set of frequencies. The pass- and stopband technique is described briefly here and the details are found in [9]. The second approximation tech- nique is a simple generalization of the procedure for the one-dimensional case given by Steiglitz [lo].
A. Approximation of Characteristics Specified by Rectangu- lar Regions
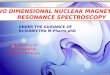
Consider the simple characteristic shown in Fig. 1 with the passband of maximum attenuation (Y,~~ within single rectangular region in the Nyquist frequency plane, and the stopband of minimum attenuation (Y,,,~,, otherwise. The transfer function H(z,,z,) of this filter can be expressed in the separable form HI(z,)HZ(zZ), where H,(z,) and H2(z2) are the one-dimensional bandpass and low-pass filters, respectively. The amplitude responses of these one-dimen- sional filters are shown in Fig. 2.
By a similar method, nine typical types of the filter, as shown in Fig. 3, can be easily derived in a separable form from the possible combinations of two one-dimensional transfer functions, with low-pass, high-pass, and bandpass characteristics. The passband of the filter is specified by the rectangular region with maximum attenuation, and the stopband is specified by some region outside the rectangu- lar region with minimum attenuation. The region between the pass- and stopbands is called the transition band. The filter whose passband is given by the rectangular region is denoted by the rectangular pass filter.
Another typical simple characteristic is specified by giving the rectangular stop region, which is referred to as the rectangular stop filter. There are nine possible types of

1068 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. Us-25 NO. 12, DECEMBER 1978
att?nuation (dB)
WI T 0 77
attenuation (dB)
Fig. 2. One-dimensional component filters of Fig. 1. (a) Amplitude response along q-axis. (b) Amplitude response along wa-axis.
01 WI T
IT
Fig. 3. Nine rectangular pass filters derived by the combination of one-dimensional low-pass, high-pass, and bandpass filters. Cross hatched region shows the passband.
such a filter, which are similar to those shown in Fig. 3 by considering the cross-hatched region as the stopband. The rectangular stop filter H(zr,zJ can be realized in a form
where H,(z,)H2(z2) is the transfer function of the rectan- gular pass filter, where the pass- and stopbands are the same as the stop- and passbands of the given rectangular stop filter, respectively, and ITA, and HA2(z2) are the transfer functions of one-dimensional all-pass filters [ 1 l] whose poles are the same as those of H,(z,) and H2(z2), respectively.
A more complicated characteristic specified by several rectangular regions can be realized by decomposing the original characteristic into several simple characteristics of rectangular pass and stop filters and realizing each filter in separable form by means of the previously mentioned technique. Let the passband of each block section be Pi,
pass band
stop band
7r (a)
(cl
',T
stop band I + ?T
01 (b) s
(4
Fig. 4. Derivations of a transfer function with arbitrary rectangular ass regions by decomposing the original characteristic into several
Ii. mlding block sections. (a) Specified characteristic H(zt,zZ). (b) Rect- angular pass filter . (c) Rectangular stop filter Ha(zt,zJ. (d) Rectangular stop filter H,
and the stopband be Si, then the overall pass region P and the stop region S must be obtained by the relations
P=;P; i=l
s=;s,
(4)
i=l
where M and N are the number of rectangular pass and stop filters, respectively.
For the example of Fig. 4(a), the transfer characteristic of an original filter H(z,,z,) may be decomposed into three sections as given in Fig. 4(b), (c), and (d). Thus it follows that
NZ,J*) = ~,(z,~~*)~*(z,~~*)~,(~,~~*) (5) where H,(z,,z2) is the transfer function of the rectangular pass filter, and H2(z,,z2) and Hs(z,,zJ are those of the rectangular stop filters. These building block sections can be realized in a separable form as: 1) Hr(z,,z2) is realized by using two one-dimensional bandpass filters for both directions, 2) H2(z,,zJ is realized by combining two one- dimensional low-pass and all-pass filters, and 3) H3(z,,z2) is realized by the use of two one-dimensional high-pass and all-pass filters.
From the above discussion, it is understood that the filter transfer function whose characteristic is specified in terms of several rectangular regions can be derived by using properly the rectangular pass and stop filters in separable forms.

HIRANO AND AGGARWAL: TWO-DIMENSIONAL RECURSIVE DIGITAL FILTERS 1069
B. Computer-Aided Approximation Steiglitz [lo] has given a computer-aided procedure for
the design of one-dimensional recursive filters. In this procedure, he assumes the form of a transfer function and optimizes the coefficients by minimizing the square-error function in the frequency domain. This procedure may be generalized with a minor change for two-dimensional sep- arable filters. The form of a transfer function is
K l+a,,z;‘+blkz,-* 1+a2,z;‘+b2kz~* =“& l+c z-1 (6) lk , + d,,z;* 1 + cZkzll + d2kz2-2
where
#=(a,,,&,c,,,d,,,- . . ,d,K,a2,,b2,,c2,,d2,,. +. >&A. (7)
The length of the unknown parameter vector is increased to 8K, assuming that A is eliminated by substituting its optimal value. It may be emphasized that the essential nature of the problem is unchanged whereas the complex- ity of the expressions is increased substantially. Stability and minimum phase constraints may be applied without any change since the filter is separable. The steps for the evaluation of the square-error function and its gradient are essentially the same. The different aspects are the following.
a) Summations must be evaluated over spatial grid points (zli,zzj), i=l;.*,M,j=l;..,N.
b) Products consist of two parts corresponding to zi and z2: i
c) There are 8K variables to be optimized. It is not necessary to choose the same number of
sections for z, and z2 as chosen above. In fact, depending upon the desired response, it may be advantageous to have a different number of sections for z, and z2. This will add to the bookkeeping woes of the optimization problem but it may lead to a significant saving in computation time. Undoubtedly, computation time will be an im- portant consideration in any serious problem of this na- ture.
III. DESIGN OF HALF-PLANE SYMMETRY FILTERS
In this section, a procedure is outlined whereby a half- plane symmetry characteristic may be synthesized. The overall objective is to develop a piecewise separable de- composition of a nonsep arable transfer characteristic. This is accomplished through the use of two-quadrant filters. There are two types, first and third quadrant, and second and fourth quadrant. The characteristics of these filters are developed below. The piecewise separable de- composition is carried out in terms of these two-quadrant filters.
-
Fig. 5. Ideal low-pass characteristic.
Consider the ideal low-pass filter shown in Fig. 5. It is a four-quadrant symmetry filter, and it can be approxi- mated by a separable filter
I= ~,(z,)~*(z*) (8) where (?,(z,) and G,(z,) are one-dimensional low-pass filters. On replacing
z,+z,e+, z2pz2e-jB2 I (9)
in G,(z,) and G,(z,), one obtains the shifted characteris- tics for the one-dimensional filters G,(z,) and e,(z,), and also for the two-dimensional filter (?L(zI)&2(z2). Let us denot_e the shifted characteristics by G,(z,,/~,), g2(z2, e,), and G(zl,B,,z2,0,), where
and
The filter coefficients in the filters G”,(z,,B,), G”2(z2,82), and G(zi, 8,,z2,&) are complex, in general. We shall use such filters as building blocks for realizing the half-plane symmetry characteristic. Before proceeding with this task several comments are in order.
Fig. 5 shows an ideal low-pass characteristic, and if 8, = e2 = r/2, the shifted ideal response corresponds to the one shown in Fig. 6. In practice, the ideal low-pass filter of Fig. 5 will be approximated by a finite-order filter, as in (8), for example a fourth-order Butterworth filter in each direction. In that case, the sharp boundary between pass and reject regions disappears, and it is replaced by a smooth characteristic. On shifting such a characteristic, one will not obtain the ideal pass region of Fig. 6. How-

1070 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. CAS-25, NO. 12, DECEMBER 1978
t we T
Fig. 6. Shifted ideal low-pass characteristic.
Fig. 7. Examples of nonideal shifted low-pass characteristics w$! peak attenuation - 30 dB. (a) Second-order Butterworth charactenstlc. (b) Fourth-order Butterworth characteristic.
ever, the ideal characteristic may be approximated arbi- trarily closely by choosing a sufficiently high-order low- pass filter. Fig. 7 shows an example illustrating the change of the characteristic (11) as a function of the order of the filter approximating the low-pass filter. It is clearly seen from the characteristics of Fig. 7 that approximation improves if the order of the filter increases.
These characteristics in the ideal case correspond to two-quadrant all-pass filters as shown in Fig. 8. Notice that the first and second terms in the right side of (13a) and (13b) represent zero-phase filters with complex coef- ficients. But the coefficients of the resulting -filters G_,a(z,,z2) and G,,(z,,z,) are real because @zGs and G* = G The_ purpose of the terms G,(z,, z2)’ . &(, - I‘yz -
‘I @(z, ‘)G,(z,, z2)63z;‘, z;‘) and G2(z,, z2)
,z~‘)~,(z,,z,)~~(z;‘,z;‘) in (13a) and (13b) is tc remove the overlap that may be created by adding G,(z,, z2)&(z;‘, z;‘) and G,(z,, z2)G”z(z;‘, z;‘), and G2(~1,z2)&(z,~1,~2~‘) and ~,(z,,z,)~~(zi~‘,z;‘), respec- tively. In the ideal case, this overlap will consist of one point at the origin. In practice, pass and reject regions will not have sharp boundaries, and the pass regions may spill over into the adjacent quadrants gradually on shifting the low-pass characteristics. Therefore, we may neglect the overlap in many cases, although it depends on actual specifications. Accordingly, G,,(z,,z,) and G,,(z,,z,) may be reduced to
G;~(z,,Q)= ~,(z,,z,)~‘:(z,-‘,z;‘)
and + 63(zi,z2)~3*(z;‘,z~‘) (13c)
+ ~,(z,,z,)~~(z,‘,z,‘). (13d)
As seen above, the choice of 8, = 8, = a/2 leads to a Let U(zi,zJ and V(zi,z2) be given separable four- first-quadrant filter. Further, it may easily be seen that the quadrant characteristics with zero phase, as shown in Fig. low-pass characteristic may be shifted to any quadrant by 9. Construct the function Ni(zi,z2), H2(z,,z2), H(z,,zJ as
suitable choice of 0, and 0,. Let
&z1,z2)= 6 z,, - q,z*, -; ( >
G,(z,,z*)=6 z ( 122 29 1 z - 4
) (12)
where the subscript on 6 refers to the quadrant to which the low-pass characteristic has been moved. Next, con- struct the filter characteristics
-~,(z,,z2)~~(z~~‘,z~‘)~3(~,,z2)~~(z,~1,z~’) (13a) and
+ ~4(z,,z2]~~(z,‘,z,‘)
- cT*(z,,z*)~;(z,-‘,z*- ‘)~4(z,,z2)~~(z~‘,z~1) (13b)
where 6: denotes the filter with the complex conjugate of the coefficients of 6i, and so on.

HIRANO AND AGGARWAL: TWO-DIMENSIONAL RECURSIVE DIGITAL FILTERS 1071
- w, T ?l
(b) I Fig. 8. Two-quadrant ideal all-pass characteristics.
follows:
and
W-4
(14b)
H(ZbZ2) = ff1(Z,J*)+ fJ2&7z2)- f4(z,,z,)&(zI,Z*).
(14c)
For the ideal case, these characteristics are shown in Fig. 10. Here again the product term, N,(z,,z,)H,(z,,z,), is included to remove any overlap that may occur due to the terms H,(zl,z2) and H2(zl,z2). It may be observed that H(z,,z2) is a half-plane symmetry characteristic with zero phase. Also, the transfer function H(z,,zJ has real coef- ficients. Generally, the zero-phase filters U(z,,z,) and V(zI,z2) may be given as
U(z*,z*)= c?(z,,z*)qz;‘,z;‘)
- w,T 77
(b) Fig. 9. Examples of four quagdy; yharacteristics. (a) U(zI,z2). (b)
1, 2
V(z,,z*)= ~(z,,z*)i+-‘,z;‘). (15) Now the problem of the present paper may be posed as
follows. Given the characteristic H(z,,z2) of Fig. 10(c), which is a half-plane symmetry characteristic, develop a piecewise separable decomp$sition ottlined above. in par- ticular, find the functions U(z,,z,), V(z,,z2), and G(z,,z,) such that the constraints of the characteristic in Fig. 10(c) are satisfied with the least order for the decomposi$on.
It may be observed that the choice of the filter G(z,,z2) determines how well the piecewise separable decomposi- tion (13) and (14) approximates the given characteristic. Clearly, the choice of the low-pass transfer function de- termines the two-quadrant filters of Fig. IO(a) and (b). Thus a general design procedure for developing a piece- wise separable realization may be outline-d as follows:
a) Choose the filter realization for G(z,,z2), possibly with the consideration of the given characteristic.

1072 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. CAS-25, NO. 12. DECEMBER 1978
9T 77
(a) -n *
(b)
Fig. 10. Given half-plane symmetry characteristic and its decomposi- tion into two characteristics. (a) First and third quadrants. (b) Second and fourth quadrants. (c) Given characteristic.
b) Determine the characteristics of the filter Gis(z,,zJ and GZ4(z,,zJ, and, in turn, determine the two-quadrant characteristics similar to Fig. 10(a) and (b), and four- quadrant characteristics of Fig. 9(a) and (b), from the given characteristic.
c) Use these characteristics to design separable filters by the technique of Section II.
d) Determine the overall decomposition and calculate if the design criteria are met. If the design specifications are not satisfied, choose a different G(z,,zJ and repeat the procedure.
The earlier works [12], [13] partly motivated the devel- opment and procedure presented above.
It may be observed again that there is, considerable choice and flexibility in the selection of G(z,,z,). How- ever, a suitable choice will result in a useful saving at the design stage, and possibly at the implementation stage. This problem is again considered in the next section where two examples are presented.
In the present paper, the minimum order is achieved by searching exhaustively for it. However, in the future it may be possible to develop an analytical method for doing the same. Needless to add, the procedure above is cumbersome especially in the number of component filters, but it must be emphasized that a nonseparable characteristic has been realized as a combination of separ- able characteristics.
IV. ILLUSTRATIVE EXAMPLES
The design technique developed in the previous section is demonstrated here by deriving half-plane symmetry filter transfer functions for. two illustrative examples. AS observed in Section III, there is consider_able flexibility in the choice of the building block filters, G(z,,z,), U(zi,z,), and $z,,z,). This choice is reduced by realizing the component one-dimensional filters, by Butterworth ap- proximation. The order n of the one-dimensional low-pass filter for Butterworth approximation is selected as the minimum number satisfying the inequality
In k, n’ Ink
where
k= tan +
Wmin T tan - 2
(16)
(17)
(18)
In (17) and (18), w, is the cutoff angular frequency, (Y,,, is the maximum attenuation in the passband, and amin and timin are the minimum attenuation and minimum angular frequency in the stopband, respectively. Once the order is determined, the one-dimensional low-pass filter transfer

HIRANO AND AGGARWAL: TWO-DIMENSIONAL RECURSIVE DIGITAL FILTERS 1073
-
-7 - 77
- ,I
Fig. 11. The given specification for Example 1.
*IT
function can be written explicitly in the product form as in [9]. Similar results hold for other types of filters.
A. Example I We derive the transfer function for the characteristic of
Fig. 11, without contiguous passbands between the char- acteristics of first and third quadrants, and that of second and fourth quadrants. The maximum attenuation amax in the passband of the given specification is 3 dB and the minimum attenuation (Y,,,~~ in the stopband is 20 dB. As all-pass filters, G;,(z,,z,) and G&(z,,zJ of (13~) and (13d) are employed. Because of the symmetry of the given characteristic, the identical one-dime_nsion_al low-pass filters are used to develop G(z,,zJ, i.e., G, = G2.
Now the problem is to derive the all-pass transfer functio_ns, G,$(z,,z-J azd G&(z,,z~), and the transfer func- tions U(z,,zJ and V(zi,zJ of the four-quadrant filters given, in (15), keeping the total order of the transfer function H(z,,zJ minimum. The characteristic of fi(z,,z,) for the present example can be decomposed into two sections as
h4= ffL(w*MfE(w2) (19) where H,Jz,,zJ is the transfer function of a two-dimen- sional low-pass filter, realized in the separable form HL(z,)HL(zZ). In (19), H&z,,zJ is the transfer function of the rectangular stop filter which is realized from (3) as
~“E(zI~Z2)=~A(zI)~A(Z2)- [IffHhwIf(412 (20) where HA(z,) and H,(z,) are the one-dimensional all-pass and high-pass filter transfer functions, respectively. The characteristics of the two sections in (19) are four- quadrant symmetric, so only the fir_t quadrants are shown in Fig. 12. The transfer function V(z,,z,) can be realized by using two one-dimensional bandpass filters for both directions as HB(z,)HB(zJ. The third term in (14c) will
(a) (b)
*w, T we T
Fig. 12. Decomposition of the first quadrant of Fig. II. (a) Rectangu- lar pass filter H&z,,Q). (b) Rectangular stop filter HHE(zI,z2).
TABLE I REQUIREMENTS FOR EACH ONE-DIMENSIONAL FILTER WIIICH IS
FOUNLI FROM’THE GIVEN TWO-DIMENSIONAL SPECIFICATIONS
ocT amax OminT ami,
G(z,) HL(z,)
Wl )
0.h
0.5n
0.5n 0.825
0.625
0.75n
0.25n
10
10
not appear for this example because there is no overlap in the passband between H,(z,,z,) and H,(z,,z,) for a suit- able selection of G(z,,z~).
The parameters for H,(z,,?,) are ceosen first. The suit- able values of wC, amin, and amin for G(z,) and HL(z,) are found from the given specifications and they are tabulated in Table I, together with the values of o,, amaXAand W,in for HH(z,) in (20). The values of cy,,, for G(z,) and HL(z,), and amin for HH(zJ are determined later. For each integer value of n starting from 1 to some reasonably large number, (Y,~~ of G(z,) and HL(z,), and CX,~* of HH(z,) can be calculated from (16). Then all the coefficients of these transfer functions are derived for fixed order n. Once such a set-of parameters is calculated, the suitable combination of G(z,), HL(z,), and H&z*) to satisfy the given two-dimensional specifications keeping the total order minimum can be obtained by the exhaus- tive search, starting from the lower order.
The minimum orders of G(z,), HL(zI), and H,,(z,) obtained are 4, 4, and 2, respectively, w_hich yield a,,,= 1.328 dB and ‘(Y,,, = 0.03377 dB for G(z,) and H,.(z,), respectively, and (Y,in= 9.088 dB for HH(zI). The final expre:sions for these transfer functions are given below. For G(z,) and HL(z,), it follows
&I) = ii, Fi(ZI) (21)
ffL(ZI) = ,4, Fi(z,) (22)
where

1074 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. CAS-25, NO. 12, DECEMBER 1978
Y fHH(~;1)HH(~;1)12
S,(Z,J,) “p;l,z;l) + HB(z1)He(z2) -1 -1
H&z1 )HB(z2 ) <
G4(z, J*) C*(z 41 2) -1 ,z-l +
G*(Z1J2) -1 -1 Gpl ‘Z2 )
-l HB(z1)HB(z2) HB@HB(+
G4(Z1’Z2) -1 -1
$(Zl ‘Z2 )
Fig. 13. Final configuration of H(z,,z*) in Example 1.
TABLE II COEFFICIENT VALUES IN (23)
71 ?l =12 a22
G(z, 1 -0.18529 0.44975 -0.13339 0.043676
HL(z,) -0.81978 0.51324 -0.60987 0.12577
TABLE III COEFFICIENT VALUES OF (28) FOR i = 1,2,3
i 1 2 3
ali -0.52163 -1.28530 0.17667
'2i 0.25933 0.69257 0.56572
1 -Lyi;+(Yzi Fi(zJ= 4
(l+z;‘)* l- “iizi-‘+“2iz,-2 ’
i= 1,2.
(23) The coefficient values (Y,~ and azi for (23) are given in Table II. The transfer functions HA(zJ and HH(zJ are given as
HA(z,)= zI-2-aIzl -‘+a, 1 -aa,z,‘+a2z;*
1+(Y,+(Y* Hff(Zl)’ 4
(l-z;‘)* 1-~a,z;‘+a2z;* (25)
where
(Y, = 0.44958 and a2 = 0.20753. (26)
Next the transfer function Hs(<i) which is a component
Fig. 14. Frequency characteristic of the designed transfer function in Example 1 with peak attenuation - 30 dB.
of H2(z,,z2) is obtained as
i=l
with the order of 6, where K=5.3585 and
(27)
H&J = + 1-z;* 1 - aliz,-’ + (w2iz,-* . (28)
The coefficient values in (28) are given in Table III. The final configuration is shown in Fig. 13 and its
frequency characteristic is shown in Fig. 14, which agrees with the given specifications.
B. Example 2 Consider next the characteristic of Fig. 15 where there
are contigyous passbands with all quadrants. The transfer function U(z,,z,) for this example is also written in the

HIRANO AND AGGARWAL: TWO-DIMENSIONAL RECURSIVE DIGITAL FILTERS 1075
Fig. 15. The given specification for Example 2.
-w,T . b
Fig. 16. Frequency characteristic of the designed transfer function in Example 2 with peak attenuation - 30 dB.
form of (19) while @L,, ZJ is realized by cascading two different one-dimensional low-pass filters, HLZ,(zI) and H&z& for both directions.
The third term of (14~) does not vanish for this case, which makes the design procedure complicated. By taking into account the third term, there is no trouble on the maximum attenuation in the pass region, while the mini- mum attenuation in the stop region must be carefully determined. In order to make the minimum attenuation at o,T=0.5~ and w,T=0.5r be 20 dB (0.1) it follows that
~,(z,,z,)+~*(z,,z*)-~,(z~,Z*)~*(Z,,Z*)=0.1 @9) for z, = z2 = ei”.5p. With this constraint, then the minimum attenuation of the one-dimensional low-pass _ function Hi(z,) in (19) for Example 2 and HL2,(z,) in v(z,,zJ is obtained-as 15.24 dB, which corresponds to the numerical value of 0.1731.
The same transfer functions Gi3(z1,z2), G&(z,,z&, and HHE(z,,z2) as in Example 1 are also used here, while
TABLE IV REQUIREMENTS FOR EACH ONE-DIMENSIONAL FILTER
FOR EMLE 2
amax OminT u,,,in(dB)
H;(y) 0.5n 0.15 0.75n 15.24
HL21(z1' 0.5n 0.5 0.75n 15.24
HL22(z1' O.&l 0.5 0.5n 10
TABLE V COEFFICIENT VALUES FOR EXAMPLE 2
aO 91 91 * T2 "22
H;(q) - -0.58560 -0.47989 -0.42814 0.081975
HL2, (2,) -0.14428 -0.38219 0.35171
HL&,) 0.25933 0.67638 0.39180
Ht(z,) is not the same as HL(zI) in Example 1, as seen from Table IV. The order of HL(z,) is also 4 and it follows that
fJL(ZI) = ,p, Fi(z,) (30)
where Fi(zl) is also given in (23) and the coefficient values for this case are given in Table_V. The requirements for the low-pass filters composing V(zi,zJ are also given in Table IV with the transfer function of the form
1 - (Y(J 1+z;’ l-“II+~*I (1 +‘;I)* 2 1-a,z;’ 4 1- a,,z,-‘+cr*,z,-2 *
The coefficient values for each case are given in Table V. The overall characteristic is shown in Fig. 16, which shows the agreement with the given specification.
V. CONCLUSIONS
The paper has presented techniques for the design of separable and nonseparable characteristics. Naturally the emphasis has been placed on the design of filters for nonseparable characteristics, because there is a definite paucity of results in the literature. Furthermore, the non- separable characteristic has been designed as a piecewise separable transfer function. This piecewise separable transfer function lends itself towards a simple implemen- tation of the characteristic. Needless to add, the overall transfer function is a complicated one but the repeated structure within the transfer function reduces this com- plexity. It may be noted that a single second-order section is repeated several times in the transfer function. This repeated second-order section eases its implementation whether it be in software or hardware.
The difficulties of stability associated with the nonsep- arable characteristic do not arise in the technique above. They are entirely bypassed since, at all times, one is

1076 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS, VOL. CAS-25, NO. 12, DECEMBER 1978
considering separable transfer functions. This is a major point in favor of the present method as compared to earlier attempts at the synthesis of nonseparable char- acteristic.
ACKNOWLEDGMENT
The authors are happy to acknowledge the help of M. Sakane of Kobe University and H. Chang of the Univer- sity of Texas with the illustrative examples in Section IV.
111
PI
[31
141
I51
161
[71
PI
I91
1101
Pll
REFERENCES J. L. Shanks, S. Treitel, and J. H. Justice, “Stability and synthesis of two-dimensional recursive filters,” IEEE Trans. Audio Electro- acowt., vol. AU-20, pp. 115-128, June 1972. H. Chang and J. K. Aggarwal, “Design of two-dimensional recur- sive filters by interpolation,” IEEE Trans. Circuits Syst., vol. CAS-26, pp. 281-291, June 1977. N. A. Pendergrass, S. K. Mitra, and E. I. Jury, “Spectral transfor- mations for two-dimensional digital filters,” IEEE Trans. Circuits Syst., vol. CAS-23, pp. 26-35, Jan. 1976. M. T. Mamy and J. K. Agganval, “Picture processing using one-dimensional imnlementations of discrete olanar filters.” IEEE Trans. Acoust., Spekh, Signal Processing, vof. ASSP-22, pp. 164 173. June 1974. R. ‘M. Mersereau and D. E. Dudgeon, ‘The representation of two-dimensional sequences as one-dimensional sequences,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-20, pp. 320- 325, Oct. 1974. S. Treitel and J. L. Shanks, ‘The design of multistage separable planar filters,” IEEE Trans. Geosci. Electron., vol. GE-9, pp. lo- 27, Jan. 1971. J. M. Costa and A. N. Venetsanopoulos, “Design of circularly symmetric two-dimensional recursive filters,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-22, pp. 432-443, Dec. 1974. G. A. Maria and M. M. Fahmy, “An b design technique for two-dimensional recursive filters,” IEEE Trans. Acoust., Speech, Signal Processing, vol. ASSP-22, pp. 15-21, Feb. 1974. K. Hirano, “Design of four-quadrant 2D digital filters having the characteristic specified with rectangular regions,” to be published. K. Steiglitz, “Computer-aided design of recursive digital filters,” IEEE Trans. Audio Electroacqwt., vol. AU-18 pp. 143-149, June 1970. S. K. Mitra and K. Hirano, “Digital all-pass networks,” IEEE Trans. Circuits Syst., vol. CAS-21, pp. 688-700, Sept. 1974.
1121
[131
T. H. Crystal and L. Ehrman, “The design and applications of digital filters with complex coefficients,” IEEE Trans. Audio Elec- troucoust., vol. AU-16, pp. 315-320, Sept. 1968. R. R. Read, J. L. Shanks, and S. Treitel, “Two-dimensional recur- sive filtering,” in Topics in Applied Physics, vol. 6. New York: Springer, 1975.
+
Kotaro Hlrauo (SW-M’65-SM’76) received the B.Engrg., M.Engrg., and Dr.Engrg. degrees in communication engineering from Osaka Univer- sity, Osaka, Japan, in 1960, 1962, and 1965, respectively.
Since 1965, he has been with Kobe Univer- sity, Kobe, Japan, as an Associate Professor of Electronics Engineering. His current research interests include the design of one-dimensional and two-dimensional digital filters and digital image processing.
Dr. Hirano is a member of the Administrative Committee (Kwansai Section) of Institute of Electronics and Communication Engineers of Japan. He has been a member of the Publicity Committee of the IEEE International Symposium on Circuits and Systems for the past few years. He is currently a member of the Technical Committee of the 1979 IEEE International Symposium on Circuits and Systems at Tokyo, and a member of Technical Committee of 1980 International Zurich Seminar on Digital Communication.
+
J. K. Aggarwal (S’62-M’65-SM’74-F’76), for a photograph and biogra- phy please see page 000 of this issue of the TRANSACTIONS.
.




![Efficiency vs Robustness in High-Dimensional Statisticsrongge/stoc2017ml/ilias_diakonikolas... · Comparison between two Approaches Recursive Dimension-Reduction [LRV’16] ... Key](https://img.dokumen.tips/doc/110x75/5b0e6c497f8b9a73608bbf70/efficiency-vs-robustness-in-high-dimensional-statistics-ronggestoc2017mliliasdiakonikolascomparison.jpg)