Embed Size (px)
Citation preview

Derivative-Based Fuzzy System Optimization
Dan SimonCleveland State University
1

Suppose we have a fuzzy controller that operates for N time steps. The controller error can be measured as:
2
2
1
1
2
ˆ
ˆ system output at -th time step
desired output at -th time step
N
q q q
q
q
E EN
E y y
y q
y q

Input Modal Points cij
3
2
1
1
2
ˆ
N
q q q
E EN
E y y
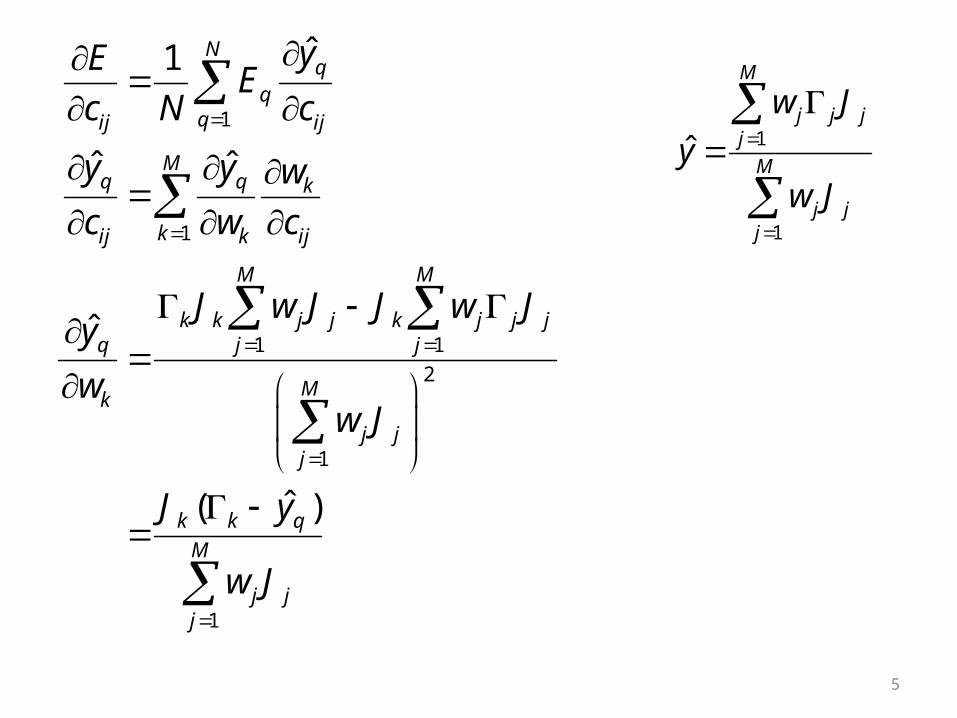
Note that yq is constant. Therefore,
1
ˆ1 Nq
qqij ij
yEE
c N c
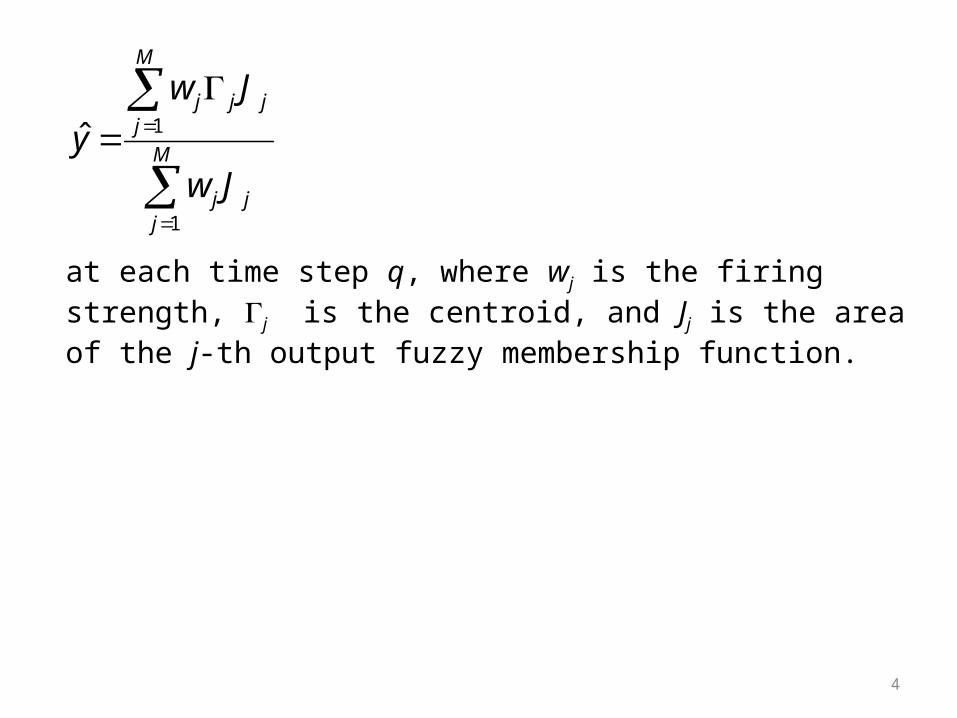
at each time step q, where wj is the firing strength, j is the centroid, and Jj is the area of the j-th output fuzzy membership function.
4
1
1
ˆ
M
j j jj
M
j jj
w J
yw J
5
1
1
1 1
2
1
1
ˆ1
ˆ ˆ
ˆ
ˆ( )
Nq
qqij ij
Mq q k
kij k ij
M M
k k j j k j j jq j j
Mk
j jj
k k q
M
j jj
yEE
c N c
y y w
c w c
J w J J w Jy
ww J
J y
w J
1
1
ˆ
M
j j jj
M
j jj
w J
yw J

Definition:ri1k = 1 if x1 fuzzy set i is a premise of the k-th rule and wk = fi1(x1), and ri1k = 0 otherwise. In other words, ri1k = 1 if x1 determines the activation level of the kth rule because of its membership in the i-th fuzzy set.Similarly, ri2k = 1 if x2 fuzzy set i is a premise of the k-th rule and wk = fi2(x2), and ri2k = 0 otherwise.
6

x1 NS (0.8) and x1 Z (0.2)x2 Z (0.3) and x2 PS (0.7)12-th rule: x1 NS and x2 PS y NSTherefore, r2,1,12 = 1.
7
NL NS Z PS PL
NL NL NL NS NS NS
NS NL NS Z Z Z
Z NL NS Z PS PL
PS Z Z Z PS PL
PL PS PS PS PL PL
Change in Error x2
Error x1
Throttle Position Change y
-6 -4 -2 0 2 4 60
0.2
0.4
0.6
0.8
1
Le
ve
l of M
em
be
rsh
ip
Input 1
x1
-6 -4 -2 0 2 4 60
0.2
0.4
0.6
0.8
1
Le
ve
l of M
em
be
rsh
ip
Input 2
x2
Example:
ri,1,12 = 0 for i {1, 3, 4, 5}, and ri,2,12 = 0 for i [1, 5].
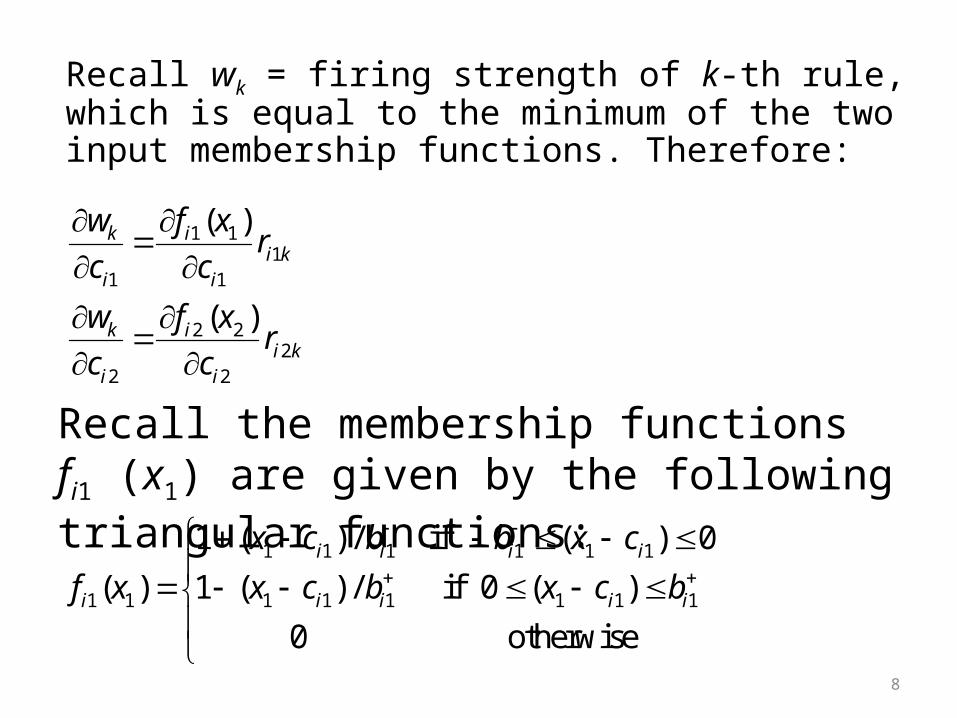
Recall wk = firing strength of k-th rule, which is equal to the minimum of the two input membership functions. Therefore:
8
1 11
1 1
2 22
2 2
( )
( )
k ii k
i i
k ii k
i i
w f xr
c c
w f xr
c c
1 1
1
1 1 1 1
1 1 1 1 11 1
1 ( ) / if ( ) 0
( ) 1 ( ) / if 0 ( )
0 otherwise
ii i
i
i
iiii
x c b b x c
f x x c b x c b
Recall the membership functions fi1 (x1) are given by the following triangular functions:

9
1 1 1 1 1
1 11 1 1 1 1
1
2 2 2 2 2
2 22 2 2 2 2
2
1/ if ( )
1/ if
0 otherwise
1/ if ( )
1/ if
0 otherwise
i i i i
ii i i i
i
i i i i
ii i i i
i
b c b x cf x
b c x c bc
b c b x cf x
b c x c bc

Summary:• The expressions on pages 3, 5, 8, and 9, give us
the partial derivative of the error with respect to the modal points of the input MFs.
• Similar methods are used to find the derivatives of the error with respect to input MF half-widths, output MF modal points, and output MF half-widths.
• Now we can use gradient descent (or another gradient-based method) to optimize the MFs.
Reference: D. Simon, "Sum normal optimization of fuzzy membership functions," International Journal of Uncertainty, Fuzziness and Knowledge-Based Systems, Aug. 2002.
10

Example: Fuzzy Cruise Control – VehicleGrad.m
11
0 20 40 60 80 1000.005
0.01
0.015
0.02
0.025
iterations
err
or
74% error decrease

Performance of cruise control after gradient descent optimization of MFs
12
0 5 10 1539.2
39.4
39.6
39.8
40
40.2
40.4
40.6
Time (sec)
Ve
loci
ty (
me
ters
/se
c)
DefaultOptimized

13-0.5 0 0.50
0.2
0.4
0.6
0.8
1m
em
be
rsh
ip le
vel
Output 1
-0.5 0 0.50
0.2
0.4
0.6
0.8
1
me
mb
ers
hip
leve
l
Output 1
Default Output MFs
Optimized Output MFsPlotMem('paramgu.txt', 2, [5 5], 1, 5)
Throttle change (rad)
The input MFs do not change as much as the output MFs

Some issues to think about:• Why use 5 membership functions for the
output and for each input?• How can we make the response less
oscillatory? How about something like:
where is a weighting parameter
14
2 21
1
1ˆ ˆ)( )(1
2
N
q q qq
E E y yN
• Try different initial conditions (initial fuzzy membership functions)
• Try different gradient descent options• Try different MF shapes• How can we optimize while constraining the
MFs to be sum normal?
15
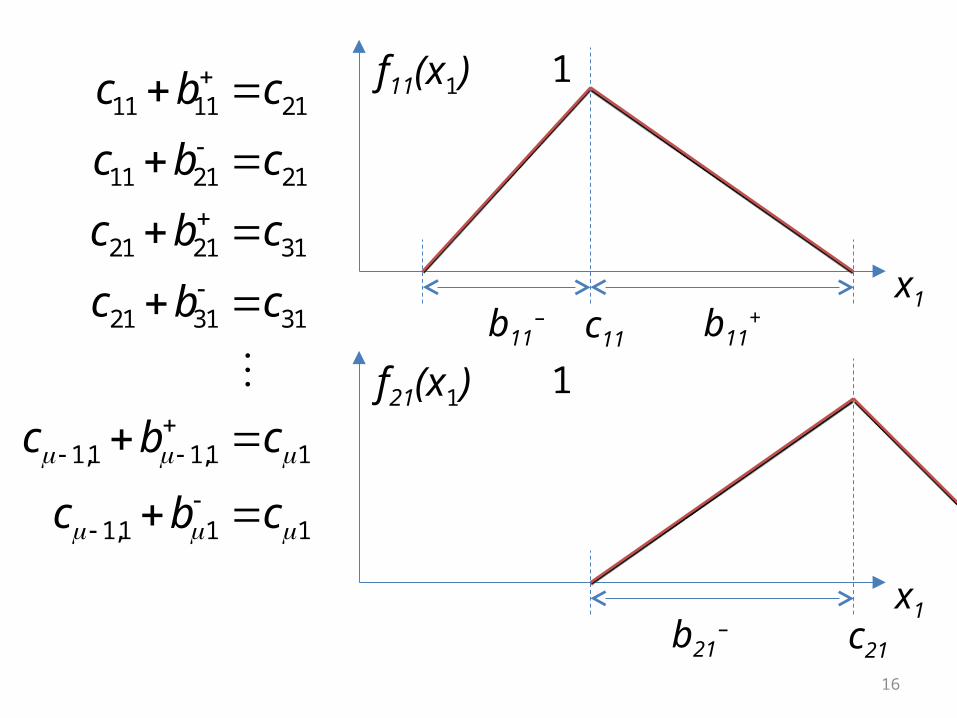
f11(x1)
16
11 11 21
11 21 21
21 21 31
21 31 31
1,1 1,1 1
1,1 1 1
c b c
c b c
c b c
c b c
c b c
c b c
c11b11
–
1
x1b11
+
f21(x1)
c21b21–
1
x1

= number of input 1 fuzzy sets = number of input 2 fuzzy sets = number of output fuzzy sets
17
11 11 11 1 1 1
12 12 12 2 2 2
1 1 1
T
x b b c b b c
b b c b b c
Similar equality constraints can be written for the input 2 MFs, and for the output MFs.

Similar equality constraints for the input 2 MFs and the output MFs
18
1 2 3
1 2 2 3 2 3
2 3 1 2 2 3
2 3 2 3 1 2
1
2
0
d , , )
0 0
0 0
0 0
0 1 1
0 0 1
iag
0 0 1
1 0 1
(
i
L L
M M
M ML
M M
M
Lx
L L
M
L1: 2( 1) 3L2: 2( 1) 3L3: 2( 1) 3

In our case, = 0
19
1 1 1
ˆ ˆmin ( ) ( ) such that
ˆ comes from unconstrained minimization
ˆ ˆ( ) ( )
positive definite we
Solu
ighting matri
ti n:
x
o
Tx
T T
x x W x x Lx
x
x x W L LW L Lx
W
20
0 20 40 60 80 1000.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
0.022
iterations
err
or
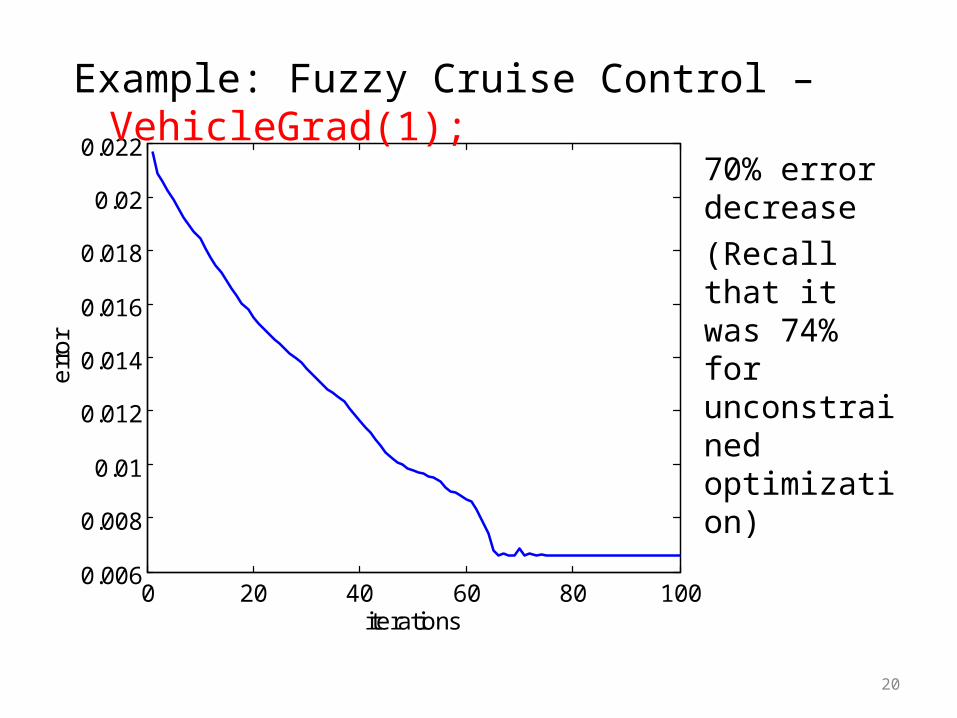
Example: Fuzzy Cruise Control – VehicleGrad(1);
70% error decrease(Recall that it was 74% for unconstrained optimization)

21
0 5 10 1539.2
39.4
39.6
39.8
40
40.2
40.4
40.6
Time (sec)
Ve
loci
ty (
me
ters
/se
c)
DefaultUnconstrained OptimizedConstrained Optimized
Performance of cruise control after unconstrained and constrained gradient descent optimization of MFs

22
-0.5 0 0.50
0.2
0.4
0.6
0.8
1
me
mb
ers
hip
leve
l
Output 1
Default Output MFs
Optimized Constrained Output MFsPlotMem('paramgc.txt', 2, [5 5], 1, 5)
Throttle change (rad)
The input MFs do not change as much as the output MFs
-0.5 0 0.50
0.2
0.4
0.6
0.8
1m
em
be
rsh
ip le
vel
Output 1
Other gradient descent optimization algorithms:• Chapter 3, “A Course in Fuzzy Systems and
Control,” by Li-Xin Wang
23





























