Embed Size (px)
Citation preview
Department of Civil, Surveying and Environmental EngineeringDepartment of Civil, Surveying and Environmental Engineering
The University of NewcastleThe University of NewcastleAUSTRALIAAUSTRALIA
Supervisor:Supervisor: Co-Supervisor:Co-Supervisor: Garry WillgooseGarry Willgoose Jetse KalmaJetse Kalma
Estimating Soil Moisture Profile Dynamics From Near-Surface
Soil Moisture Measurements and Standard Meteorological Data
Jeffrey WalkerJeffrey Walker

Importance of Soil Moisture Meteorology
Evapotranspiration - partitioning of available energy into sensible and latent heat exchange
Hydrology Rainfall Runoff - infiltration rate; water supply
Agriculture Crop Yield - pre-planting moisture; irrigation
scheduling; insects & diseases; de-nitrification Sediment Transport - runoff producing zones
Climate Studies

Background to Soil Moisture
Remote SensingSatellite
Surface SoilMoisture
Soil MoistureSensors
Logger Soil Moisture Model[q , D ( ), ( )] f s(z)
Research Objective Develop a methodology for making improved estimates
of the soil moisture profile dynamics
Efforts focussed on:
• Identification of an appropriate soil moisture profile estimation algorithm
• Remote Sensing for surface soil moisture - volume scattering
• Observation depth = f(frequency, moisture, look angle, polarisation)
• Assessment of assimilation techniques
• Importance of increased observation depth
• Effect of satellite repeat time
• Computational efficiency - moisture model/assimilation
• Collection of an appropriate data set for algorithm evaluation
• Proving the usefulness of near-surface soil moisture data

Seminar Outline Identification of an appropriate methodology for
estimation soil moisture profile dynamics Near-surface soil moisture measurement One-dimensional desktop study Model development
Simplified soil moisture model Simplified covariance estimation
Field applications One-dimensional Three-dimensional
Conclusions and Future direction
Literature Review Regression Approach
Uses typical data and land use - location specific
Knowledge Based Approach Uses a-priori knowledge on the hydrological
behaviour of soils
Inversion Approach Mainly applied to passive microwave
Water Balance Approach Uses a water balance model with surface
observations as input

Water Balance Approach Updated 2-layer model by direct insertion of
observations - Jackson et al. (1981), Ottle and Vidal-Madjar (1994)
Fixed head boundary condition on 1D Richards eq. - Bernard et al. (1981), Prevot et al. (1984), Bruckler and Witono (1989)
Updated 1D Richards equation with Kalman filter - Entekhabi et al. (1994)
Updated 2-layer basin average model with Kalman filter - Georgakakos and Baumer (1996)
Updated 3-layer TOPLATS model with: direct insertion; statistical correction; Newtonian nudging (Kalman filter); and statistical interpolation - Houser et al. (1998)

Soil Moisture Profile Estimation Algorithm
Initialisation Phase Use a knowledge-based approach
Lapse rate; Hydraulic equilibrium; Root density; Field capacity; Residual soil moisture
Dynamic Phase (Water Balance Model) Forecast soil moisture with meteorological data Update soil moisture forecast with observations
Direct insertion approach Dirichlet boundary condition Kalman filter approach

Matric Head
TrueProfile
ModelPrediction
ModelUpdate
DirectReplacement
WithObservations
Matric Head
Depth
TrueProfile
ModelPrediction
StatisticallyOptimal
Model Update
Data Assimilation
Direct-Insertion Kalman-Filtering
ObservationDepth

The (Extended) Kalman-Filter Forecasting Equations
States: Xn+1 = An X
n + Un
Covariances: n+1 = An n AnT + Q
Observation equationZ = H X + V
1
ψ 2
M
ψ d
⎧
⎨ ⎪
⎩ ⎪
⎫
⎬ ⎪
⎭ ⎪=
1 0 L 0 L 0 0
0 1 L 0 L 0 0
M M O M O M M
0 0 L 1 L 0 0
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
ψ 1
ψ 2
M
ψ d
M
ψ N −1
ψ N
⎧
⎨
⎪ ⎪ ⎪
⎩
⎪ ⎪ ⎪
⎫
⎬
⎪ ⎪ ⎪
⎭
⎪ ⎪ ⎪
+V

Active or Passive? Passive
Measures the naturally emitted radiation from the earth - Brightness Temperature
Resolution - 10’s km 100 km (applicable to GCM’s)
Active Sends out a signal and measures the return -
Backscattering Coefficient More confused by roughness, topography and
vegetation Resolution - 10’s m (applicable to partial area hydrology and
agriculture)

The Modified IEM Modified reflectivities Dielectric profile
m = 12 gives varying profile to depth 3mm Radar observation depth 1/10 1/4 of the
wavelength
0 25
-10
0
10
Dielectric Constant
Depth z (cm)
ε=1
ε=ε∞
=12m=1m
ε
εr z( ) = 1 + ε r∞− 1( )
exp mz( )
1 + exp mz( )

Radar Observation Depth
d
Er=|R|Et´
Evol=|T|Er´
Esur=|R|Ei
Dielectric DiscontinuityDeep Soil Layer
Air Layer
Surface Soil Layer
Ei
Et=|T|Ei Er´=aEr
Et´=aEt

Evol /Esur = ?
Addressed through error analysis of backscattering equation
2% change in mc 0.15 - 1 dB, wet dry Radar calibration 1 - 2 dB 1.5 dB 0.17
Evol
Esur
=∂σ o ln1020

Application of the Models
vv polarisationhh polarisation
rms = 25 mmcorrelation length = 60 mmincidence angle = 23o
moisture content 9% v/v
-20
0
0 5
EMSL dataIEM simulationmodified IEM, transition rate factor=12modified IEM, variable transition rate factor
Backscattering Coefficient (dB)
Frequency (GHz)0 5
Frequency (GHz)
1.5
3.5
hhvv
Observation Depth (cm)

1D Desktop Study 1D soil moisture and heat transfer
C∂∂t
=∇ Dl∇ +Dl[ ]
CT∂T∂t
=∇ λ∇T−cl T −Tref( )ql[ ]
−clρl T −Tref( )∂ l
∂t
Moisture Equation Matric Head form of Richard’s eq. Assumes:
Isothermal conditions (decoupled from temperature)
Vapour flux is negligible
Temperature Equation Function of soil moisture Assumes:
Effect from differential heat of wetting is negligible
Effect from vapour flux is negligible

0
5
10Frequency (GHz)
L S C K Band
0 oC 10 oC 30 oC 50 oC
RealComponent
ImaginaryComponent
1
Temperature Dependence Low Soil Moisture (5%)
0
30
10Frequency (GHz)
L S C K Band
0 oC10 oC
30 oC 50 oC
RealComponent
ImaginaryComponent
1
Microwave remote sensing is a function of dielectric constant
High Soil Moisture (40%)

Synthetic Data
0 10 200
0.5
1
Day
Evaporation (cm/day)
Initial conditions Boundary conditions
0 10 20
-400
0
400
Day
Soil Heat Flux (langley/day)
-600 0-100
0
Matric Head (cm)
PoorInitial
Guess
TrueInitialProfile
0 30-100
0
Soil Temperature (oC)
Depth (cm)
PoorInitial
Guess
TrueInitialProfile

Direct-Insertion Every Hour
Day 1
No Update0 cm
1
4
10 cm
True
Day 3
-600 0-100
0
Matric Head (cm)
Depth (cm)
Day 5 Day 7
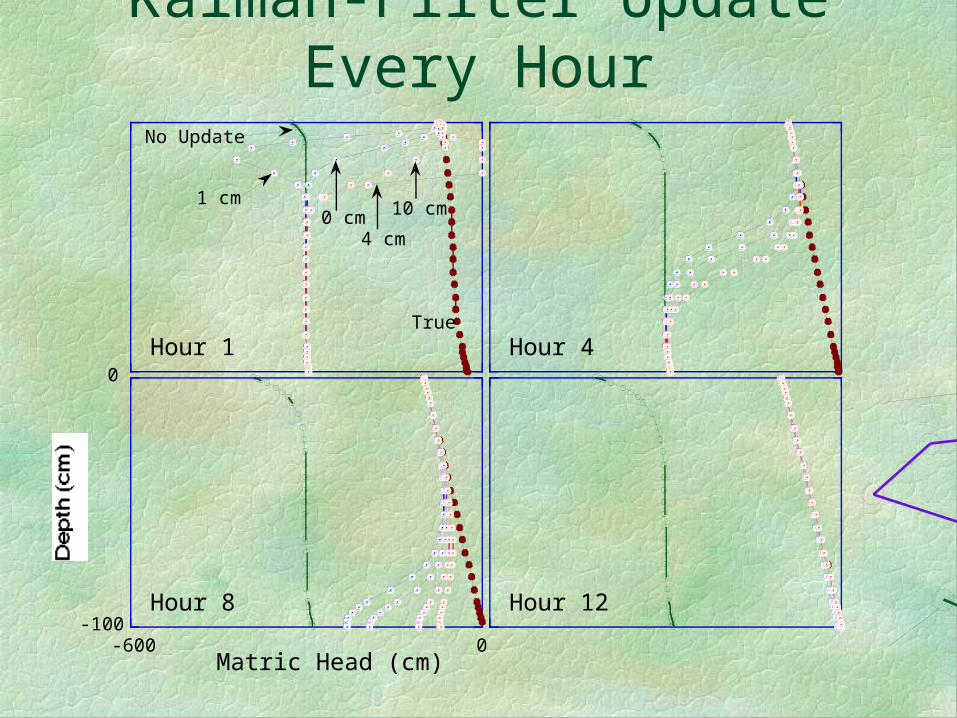
Kalman-Filter Update Every Hour
Hour 1
No Update
0 cm1 cm
4 cm
10 cm
True
Hour 4
-600 0-100
0
Matric Head (cm)
Depth (cm)
Hour 8 Hour 12

Kalman-Filter Update Every 5 Days
-3000 0-100
0
Matric Head (cm)
Depth (cm)
Day 5
No Update
True
Kalman-FilterUpdate
0Matric Head (cm)
Day 10
No Update
True KalmanFilter
Update
InvalidUpdateRegion
-2000 1000
WaterTable atSurface

Quasi Profile Observations
-600 0-100
0
Matric Head (cm)
Depth (cm)
Model
TrueProfile
Observations
ModelStandardDeviation
SmallStandardDeviation
-600 0Matric Head (cm)
Model
Observations
ModelStandardDeviation
QuasiObservations
QuasiObservation
StandardDeviations
UpdatedProfile
TrueProfile

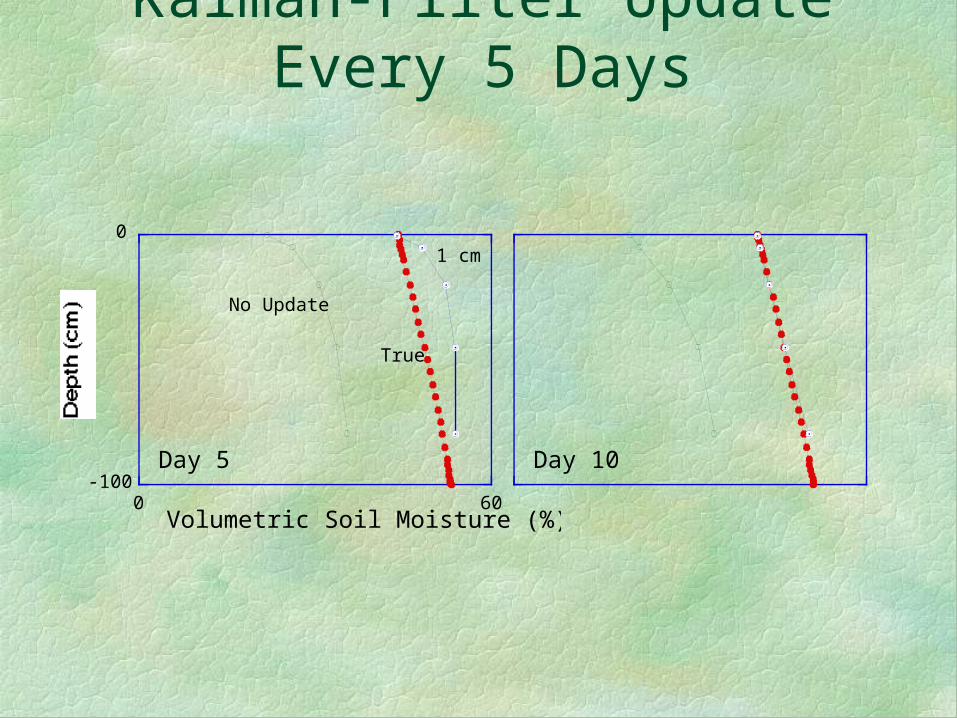
Kalman-Filter Update Every 5 Days
Day 5
No Update
0 cm
1 cm
4 cm
10 cm
True
-600 0-100
0
Matric Head (cm)
Depth (cm)
Day 10
Day 5
No Update
True
0 cm
0 30Soil Temperature (oC)
Day 10
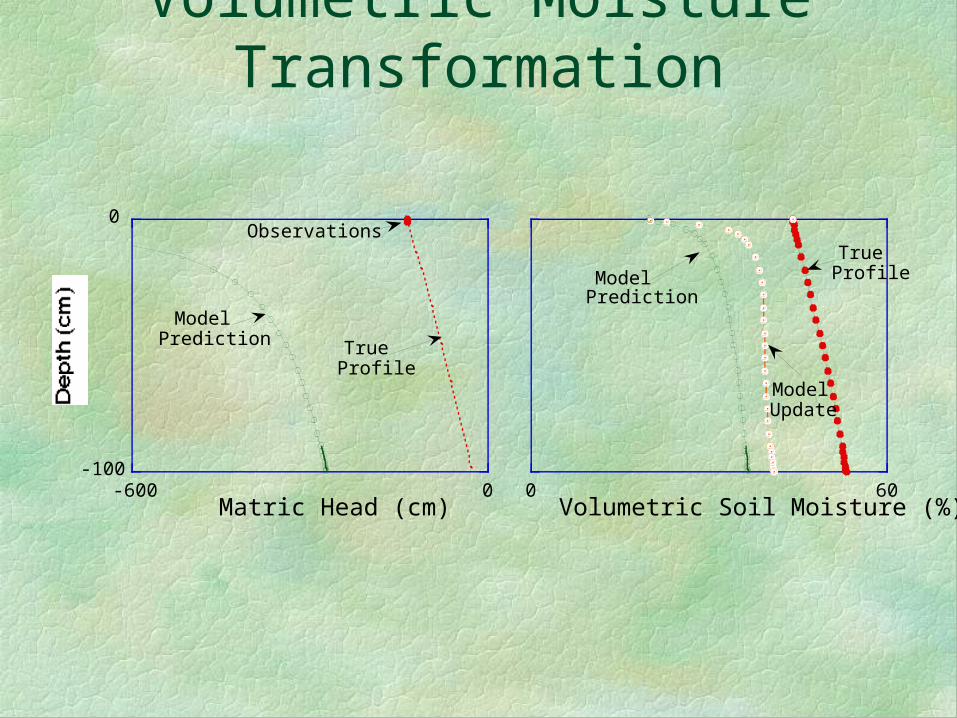
Volumetric Moisture Transformation
-600 0-100
0
Matric Head (cm)
Depth (cm)Model
Prediction
Observations
TrueProfile
0 60Volumetric Soil Moisture (%)
TrueProfileModel
ModelUpdate
Prediction

Summary of Results
Update Direct-Insertion (days) Kalman-Filter (days)
Interval Moisture* Temperature Moisture Temperature
1 Hour 7 − 0.5 2
1 Day >20* >20* 3 6
5 Days >40* >40* 15* 15
Continuous Dirichlet boundary condition Moisture 5 - 8 days Temperature >20 days
10 cm update depth Required Dirichlet boundary condition for 1 hour Required Dirichlet boundary condition for 24 hours Moisture Transformation

A Simplified Moisture Model Computationally efficient -based model
Capillary rise during drying events Gravity drainage during wetting events Lateral redistribution No assumption of water table Amenable to the Kalman-filter
Buckingham Darcy Equationq = K+K
Approximate Buckingham Darcy Equationq = KVDF+Kwhere VDF = Vertical Distribution Factor

Vertical Distribution Factor Special cases
Uniform Infiltration Exfiltration
Proposed VDFVDF =
MGRAD
DZ j+ 12−r( )
2
j − j+1
φ −r
⎛
⎝ ⎜ ⎞
⎠ ⎟
∇ = 0
z
ψ
∇ = ∞
z
ψ
∇ = −∞
z
ψ

Model Comparison Exfiltration (0.5 cm/day)
Infiltration (10 mm/hr)
0 60-100
0
Volumetric Soil Moisture (%)
Depth (cm)
Day 1
0 60-100
0
Volumetric Soil Moisture (%)
Depth (cm)
Hour 1
Day 10 Day 25
Hour 12 Hour 24
Kalman-Filter Update Every 5 Days
0 60-100
0
Volumetric Soil Moisture (%)
Depth (cm)
Day 5
No Update
1 cm
True
Day 10

KF Modification for 3D Modelling Implicit Scheme
1n+1 Xn+1 + 1
n+1 = 2n Xn + 2
n
State Forecasting
Xn+1 = An Xn + Un
where An = [1n+1]-1 [2
n]
Un = [1n+1]-1 [2
n – 1n+1]
Covariance Forecasting
n+1 = An n AnT + Q

KF Modification for 3D Modelling Covariance Forecast
Auto-regressive smooth of 1 and 2
1n+1 = 1
n + (1 – ) 1
n+1
Estimate correlations from:
= AAT where A = [1]-1 [2]
Reduce to correlation matrix
ρi,j = e where = 1 −
1
Γi,j
a
⎛
⎝ ⎜
⎞
⎠ ⎟b
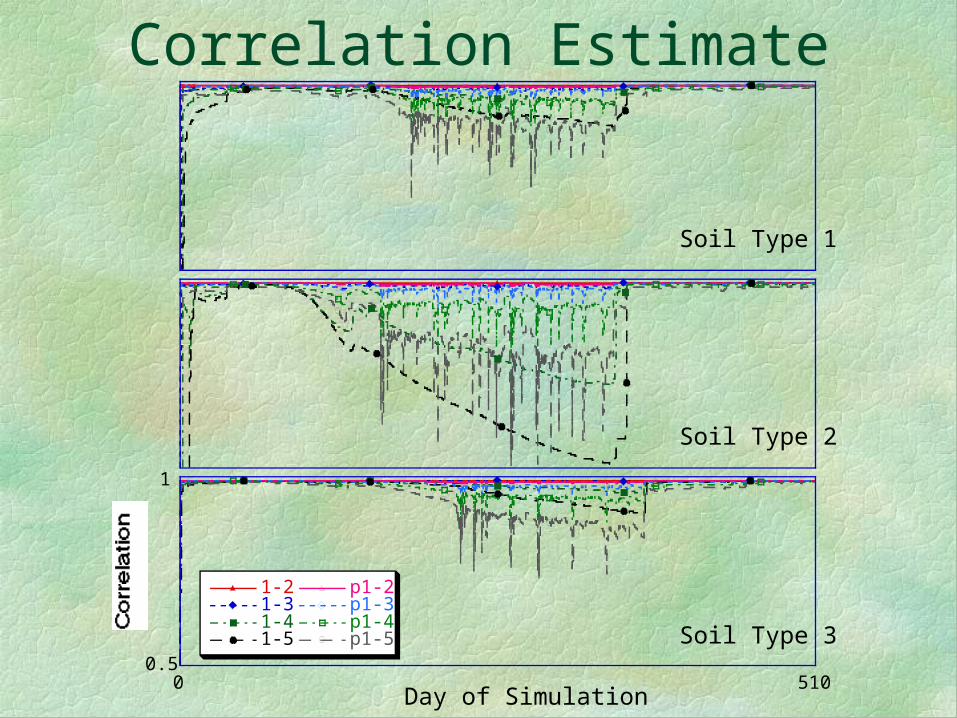
Correlation Estimate
0.5
1
0 510
1-21-31-41-5
p1-2p1-3p1-4p1-5
Correlation
Day of Simulation
Soil Type 3
Soil Type 1
Soil Type 2
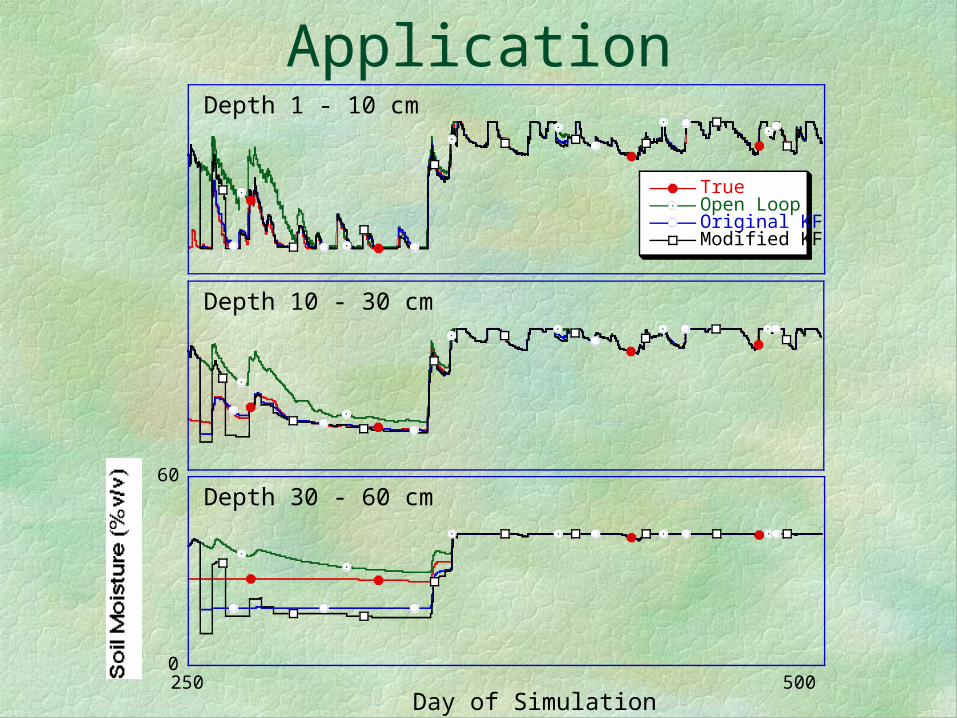
Modified Kalman-Filter Application
0
60
250 500
Soil Moisture (%v/v)
Day of Simulation
Depth 30 - 60 cm
Depth 10 - 30 cm
TrueOpen LoopOriginal KFModified KF
Depth 1 - 10 cm

Field Application
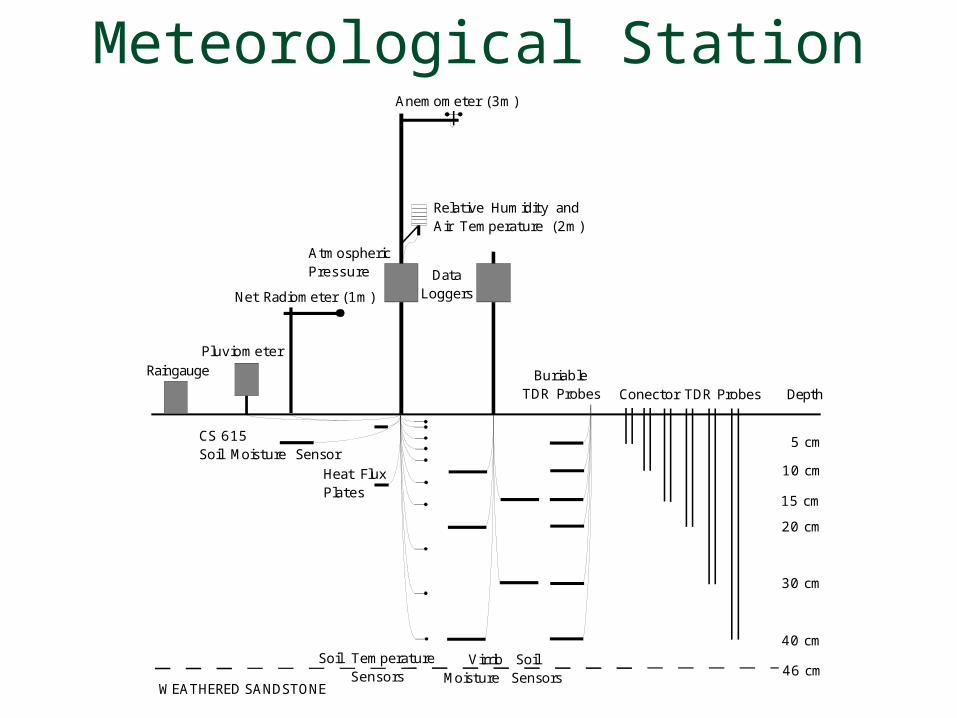
Meteorological Station
CS 615Soil Moisture Sensor
Conector TDR ProbesBuriable
TDR Probes
Net Radiometer (1m)
PluviometerRaingauge
DataLoggers
Relative Humidity andAir Temperature (2m)
Anemometer (3m)
Heat FluxPlates
Soil TemperatureSensors
Virrib SoilMoisture Sensors
Depth
5 cm
10 cm
15 cm
20 cm
30 cm
40 cm
46 cmWEATHERED SANDSTONE
AtmosphericPressure

1D Model Calibration/Evaluation
0
60
May/12 Dec/18 Jul/26
Soil Moisture (%v/v)
1997 1998
Depth 0-460 mm
Depth 0-235 mm
ModelVirribConnector TDR
Depth 0-123 mm

1D Profile Retrieval - 1/5 Days
0
60
Sep/27 Mar/26 Sep/22
Soil Moisture (%v/v)
1997 1998
Depth 0-460 mm
Depth 0-225 mm
Open LoopVirribConnector TDRKalman Filter
Depth 0-123 mm
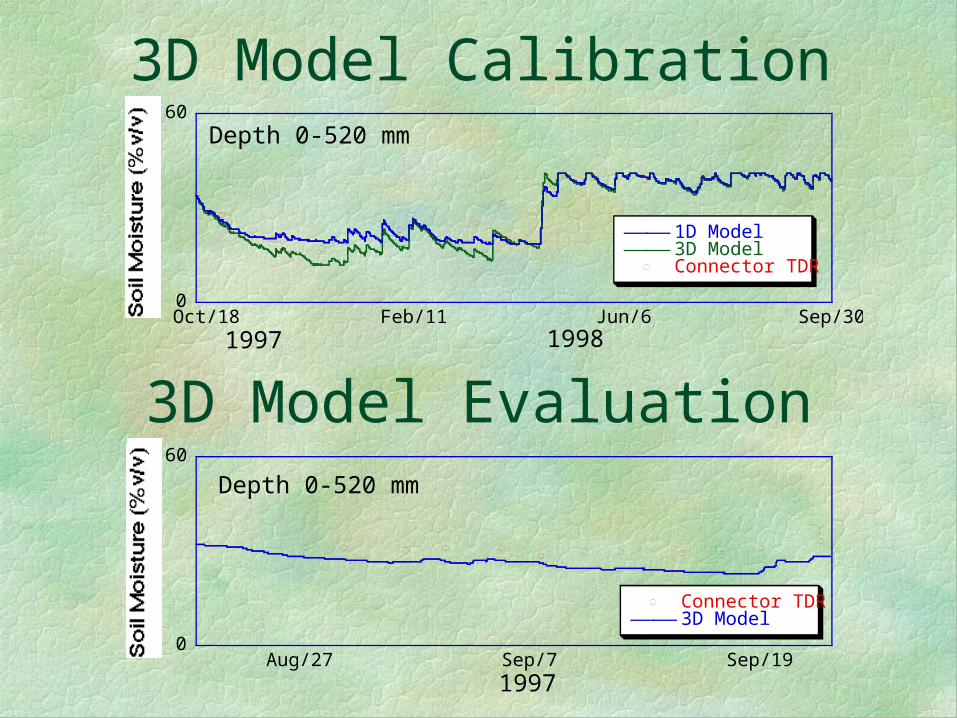
3D Model Calibration
3D Model Evaluation
0
60
Aug/27 Sep/7 Sep/19
Connector TDR3D Model
Soil Moisture (%v/v)
1997
Depth 0-520 mm
0
60
Oct/18 Feb/11 Jun/6 Sep/30
1D Model3D ModelConnector TDR
Soil Moisture (%v/v)
1997 1998
Depth 0-520 mm

3D Profile Retrieval All observations
Single Observation
0
60
Aug/27 Sep/7 Sep/19
Connector TDROpen LoopKalman-Filter
Soil Moisture (%v/v)
1997
Depth 0-520 mm
0
60
Aug/27 Sep/7 Sep/19
Connector TDROpen LoopKalman-Filter
Soil Moisture (%v/v)
1997
Depth 0-520 mm

Summary of Results
RMS of Horizons for all Profiles (% v/v)Simulation
A1 A1 - A2 A1 - B1 A1 - B2
Evaluation 9.6 5.9 4.6 4.3
Open Loop 20.8 15.8 14.2 13.4
All Observations 9.3 7.9 6.7 6.2
Single Observation 9.4 7.5 6.4 6.1

Conclusions Radar observation depth model has been
developed which gives results comparable to those suggested in literature
Modified IEM backscattering model has been developed to infer the soil moisture profile over the observation depth
Computationally efficient spatially distributed soil moisture forecasting model has been developed
Computationally efficient method for forecasting of the model covariances has been developed

Conclusions Require an assimilation scheme with the
characteristics of the Kalman-filter (ie. a scheme which can potentially alter the entire profile)
Require as linear forecasting model as possible to ensure stable updating with the Kalman-filter (ie. -based model rather than a -based model)
Updating of model is only as good as the models representation of the soil physics
Usefulness of near-surface soil moisture observations for improving the soil moisture estimation has been verified

Future Direction Addition of a root sink term to the simplified soil
moisture forecasting model Improved specification of the forecast system state
variances Application of the soil moisture profile estimation
algorithm with remote sensing observations, published soils and elevation data, and routinely collected met data
Use point measurements to interpret the near-surface soil moisture observations for applying observations to the entire profile - may alleviate the decoupling problem





























