Embed Size (px)
Citation preview

Construction Mécanique
2. ENGRENAGES CYLINDRIQUES À DENTURE DROITE Les flancs des dents (profils) sont en développante de cercle
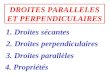
2.1. NATURE DES PROFILS EN DEVELOPPANTE DE CERCLE Soit 2 cercles C1 et C2 sur lesquels s’enroule un fil, un point M du fil décrit dans C1 la courbe P1 et dans C2 la courbe P2
O1
O2
H1
H2
P2
P1
r2
r1
rb2
rb1
C1
C2
ligne de pression
IM
Figure 2-1 : présentation des profils en développante de cercle
cteHOHO
==22
11
1
2
ωω les courbes P1 et P2 restent tangentes en M.
Terminologie :
primitifs rayons 22
11 ⇒==
rIOrIO
base de rayons⇒==
222
111
rbHOrbHO
t: menfonctionne de pressionde angle α t2121 menfonctionne de entraxe =+== rraOO
αcos)()(
22
11 ⋅=⇒==
rrbrfrbrfrb
Remarques : Les profils conjugués en développante de cercle sont définis à partir des cercles de
base (i.e. par rb) Ces profils sont des courbes parallèles.
2.2. PROPRIETES DES DEVELOPPANTES DE CERCLE
ENSETP - 5 - S. AGBANGLANON
2.2.1. Angle de pression / droite de pression L’angle de pression α est constant → existence d’une droite (ou ligne) de pression fixe. Si les frottements sont négligés, alors l’action de 2/1 sera portée par la ligne de pression.
{ } cte=⎭⎬⎫
⎩⎨⎧
=0
12
12 r
rR
IT si le couple d’entrée est constant

Construction Mécanique
2.2.2. influence de la variation d’entraxe Quel que soit l’entraxe , les profils restent conjugués. aQuel que soit l’angle de pression α, αcos21 ⋅=+ arbrb
2.2.3. conditions d’engrènement
A2 B2
H2
H1
B1A1
IMN
Figure 2-2
pour réaliser un engrenage il faut :
une succession de profils un pas de base ( ) identique pour les deux roues pour éviter des heurts lors
de l’engrènement MNPb =
)(rbfPb = 2211 BABAMN))
==
1111 θ⋅= rbBA)
avec 1
22zπθ =
z1 étant le nombre de dents de la roue 1 et z2 celui de la roue 2
2
2
1
1 22z
rbz
rbPb ⋅=
⋅=
ππ
ENSETP - 6 - S. AGBANGLANON
2.2.4. Module de référence / module de fonctionnement Le pas sur le cercle primitif est le pas primitif
2
2
1
1 22z
rz
rP ⋅=
⋅=
ππ
En multipliant dans la première égalité ⎟⎟⎠
⎞⎜⎜⎝
⎛+
1
21zz au numérateur et au dénominateur
du second terme, on obtient :
21
1
21
1
21
1
21 12
1
12
zzzz
r
zz
z
zz
rP
+
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅⋅
=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅
⎟⎟⎠
⎞⎜⎜⎝
⎛+⋅⋅
=ππ
or ( )2121
21
1
2
2
1 22zza
zzrrP
rr
zz
+⋅
=++⋅
=⇒=ππ
21
2zzaP
+⋅
=π

Construction Mécanique
On définit le module m tel que :
zdPm ==
π m est le module de fonctionnement
alors 2
zmr ⋅=
et απα coscos ⋅⋅=⋅= mPPb Remarque :
Le module n’est pas une grandeur intrinsèque à un pignon ou une roue, il est relatif à un engrenage, i.e. deux roues qui engrènent l’une avec l’autre. Le module de fonctionnement n’a aucune réalité physique, c’est le module de référence (m0) et l’angle de référence (α0) qui caractérisent l’outil de taillage qui ont une signification physique.
2.2.5. conclusion
2 roues ayant des profils en développante de cercle engrènent ⇒ aPbPbPb ∀== 21
Le nombre de dents z, le module de référence m0 associé à α0 permettent de définir les profils d’une roue.
00 cos2
α⋅⋅= mzrb 2
2100
zzma +⋅= 00 coscos αα ⋅=⋅ aa
Les caractéristiques de référence sont définies par le taillage (l’usinage).
2.3. GENERATION DES PROFILS EN DEVELOPPANTE DE CERCLE
2.3.1. Génération
Pb
P0
0
H
BA
I
( )
(D)
P
M
N
Figure 2-3
La droite (D) roule sans glisser sur le cercle pri mitif. Une droite (Π) est liée à (D) au point P, le point M décrit une développante de cercle de rayon OH
0cosα⋅= IPIM
2.3.2. Caractéristiques de taillage Le solide composé des droites (D) et (Π) est nommé crémaillère de taillage
existence d’une ligne primitive de taillage
ENSETP - 7 - S. AGBANGLANON
munie d’une succession de profils inclinés d’un angle α0 par rapport à la verticale

Construction Mécanique
les profils sont espacés d’une valeur P0 P0 : pas primitif de taillage
zr
P 00
2 ⋅=
π et
00
00
00
coscos
2
αα
⋅=⋅=
⋅=
rrbPPb
zmr
2.4. DEFINITION NORMALISEE D’UN ENGRENAGE 2.4.1. Crémaillère normalisée
Tracé de référence : tracé de section de crémaillère utilisé comme base pour la définition des dimensions de denture s normalisées d’un système de roues à développante.
Crémaillère de référence : crémaillère fictive ayant le tracé de référence pour section droite.
ligne de référence
limite de profil rectiligne
m0
R=0.38 m0
1.25
m0
m0
=20°
P= m0
S=0.5m0 E=0.5m0
Figure 2-4 : présentation de la crémaillère de référence
la crémaillère de taillage est la crémaillère complémentaire de la crémaillère de référence. les valeurs du module de référence m0 sont normalisées et choisies dans la série Renard :
Série 1 0,5 0,6 0,8 1 1,25 1,5 2 2,5 3 4 5 6 8 10 12 16 20 25 32 40 50Série 2 0,55 0,7 0,9 1.125 1,375 1,75 2,25 2,75 3,5 4,5 5,5 7 9 11 14 18 22 28 36 45
2.4.2. Dentures déportées
Figure 2-5 : épure du taillage avec déport positif
Au cours du taillage le plan de référence de l’outil est distant de 0mx ⋅=δ du cylindre primitif de taillage ( ). Le coefficient de déport x est compté positivement lorsque l’outil s’éloigne du centre du pignon.
zmd ⋅= 0
x>0 : l’outil s’écarte du centre du pignon x<0 : l’outil se rapproche du centre du pignon
ENSETP - 8 - S. AGBANGLANON x=0 : pas de déport, plan de référence tangent au cylindre primitif de taillage.

Construction Mécanique
Le déport de denture permet une optimisation des engrenages afin : d’éviter les interférences de taillage pour des nombres de dents faibles d’obtenir des rapports de conduite suffisants d’adapter l’entraxe de fonctionnement d’éviter les interférences de fonctionnement d’équilibrer les usures (glissement spécifique) d’obtenir une géométrie de dent correcte.
En pratique tous ces critères ne peuvent être optimisés simultanément, en fonction des applications certains seront privilégiés au détriment d’autres. La norme propose ci-dessous des recommandations pour le choix des déports (dentures droites ou hélicoïdales). Seulement en dehors de ces limites le choix des coefficients de déport requiert une étude spéciale plus pointue.
Figure 2-6 : influence du déport sur certaines caractéristiques de l’engrenage
Figure 2-7 : influence du déport sur la géométrie de la dent
2.4.3. Définition normalisée d’un pignon
saillie : ( )xmmh a +=+= 1000 δ creux : ( )xmmh f −=−⋅= 25.125.1 000 δ hauteur de dent : 0000 25.2 mhhh fa ⋅=+=
largeur de dent au cercle primitif : ⎟⎠⎞
⎜⎝⎛ ⋅⋅+=⋅⋅+
⋅= 000
00 tan2
2tan2
2απαδ
πxm
mS
largeur du creux au cercle primitif : ⎟⎠⎞
⎜⎝⎛ ⋅⋅−= 000 tan2
2απ xmE
ENSETP - 9 - S. AGBANGLANON
0000 mPSE ⋅==+ π

Construction Mécanique
Un pignon normalisé est complètement défini par : Son nombre de dents z Son module de taillage (de référence) m0 L’angle de pression de taillage α0 Le coefficient de déport x
Application :
e
2
1
2
3
4
1. déterminer l’entraxe de référence. 2. déterminer les caractéristiques de taillage des pignons
1 et 2. 3. déterminer l’entraxe de fonctionnement. 4. pour z3= 31 dents et z4=13 dents, déterminer N4
2.4.4. Roue à denture intérieure
Dans un tel cas le pignon et la roue tournent dans le même sens. Les flancs de dents d’une roue intérieure sont concaves
Figure 2-8 : engrenage intérieur
Ce type de denture est usiné à l’aide d’un outil pignon
saillie : ( )xmmh a −=−= 1000 δ creux : ( )xmmh f +=+⋅= 25.125.1 000 δ la saillie est ici située du coté du pied de la développante de cercle
2.5. GEOMETRIE DES DENTURES EN DEVELOPPANTE DE CERCLE
2.5.1. Equation de la développante
(D)
M
θO1
P
rb
T
Figure 2-9 : développante de cercle
ENSETP - 10 - S. AGBANGLANON
N1=200 tr/min Z2=17 dents x1=0.15 α=19.61Z1=32 dents x2=0.25 m0=1.5

Construction Mécanique
Equation paramétrique en coordonnées polaires soit le paramètre ρα , il s’agit d’exprimer ρθ et en fonction de ρα .
( )
ρ
ρ
α
θα
tan ⋅=
+==
rbrbTPMT
)
ρρρ αααθ inv=−= tan
ρα
ρcos
rb=
2.5.2. Epaisseur curviligne d’une dent en fonction de ρS ραρ et ,Sb
ABS)
⋅= 2ρ
MB
θO1
médiatrice de la dent
B
AC
A
CACBAB)))
−=
βρ ⋅=CB)
et rb
Sb⋅
=2
β
rbSbCB ⋅=⇒ ρ
21)
ραρθρ invCA ⋅=⋅=)
Figure 2- 10 :
⎟⎠⎞
⎜⎝⎛ ⋅−⋅⋅= ρρ αρρ inv
rbSbS
212
⎟⎠⎞
⎜⎝⎛ ⋅−= ρρ αρ inv
rbSbS 2
Par analogie
⎟⎠⎞
⎜⎝⎛ ⋅−= 000 2 αinv
rbSbrS
rbSbinv
rS
=⋅+⇒ 00
0 2 α
Il vient
( )⎥⎦
⎤⎢⎣
⎡−⋅+= ρρ ααρ invinv
rS
S 00
0 2
ENSETP - 11 - S. AGBANGLANON
2.6. CARACTERISTIQUES DE FONCTIONNEMENT Pour un engrenage constitué de 2 roues 1 et 2, après fabrication on connaît :
2100201021 et x, x, α, r, r, m, zz Il s’agit de connaître les caractéristiques de fonctionnement : . , α, ra, m, r 21
Posons la condition impérative de fonctionnement sans jeu. mPSS ⋅==+ π21
Ainsi on a
⎩⎨⎧
⋅=⋅⋅=+
00
21
coscos ααπ
aamSS
Où ( )⎥⎦
⎤⎢⎣
⎡−⋅+= αα invinv
rS
rS 001
0111 2 et ( )⎥
⎦
⎤⎢⎣
⎡−⋅+= αα invinv
rS
rS 002
0222 2
en posant 2
et 2
22
11
zmrzmr ⋅=
⋅= et en faisant la somme 21 SS + nous avons :
( ) ( )⎥⎦
⎤⎢⎣
⎡−⋅+
⋅+⎥
⎦
⎤⎢⎣
⎡−⋅+
⋅=⋅ ααααπ invinv
rSzminvinv
rSzmm 0
02
0220
01
011 22
22

Construction Mécanique
de même en posant ⎟⎠⎞
⎜⎝⎛ ⋅⋅+= 01001 tan2
2απ xmS , ⎟
⎠⎞
⎜⎝⎛ ⋅⋅+= 02002 tan2
2απ xmS ,
2et
220
0210
01zm
rzm
r⋅
=⋅
=
il vient ( ) ( ) ( ) 0tan2 021210 =−⋅+++⋅⋅ ααα invinvzzxx
d’où ( )( )21
2100 tan2
zzxxinvinv
++
⋅⋅+= ααα
qui est la relation de fonctionnement sans jeu pour un engrenage Cette relation permet de calculer les caractéristiques de fonctionnement théorique sans jeu en définissant l’angle de pression de fonctionnement α. L’écriture des entraxes de fonctionnement sans jeu et de celui théorique conduit à : α 0 α
( )αcos2
212121
rbrbzzmrra +=
+⋅=+= et ( )
0
2121002010 cos2 α
rbrbzzmrra +=
+=+=
Ainsi : αα
coscos 0
002
2
01
1
0
====mm
rr
rr
aa
Remarques :
Pour un engrenage pignon (1) – roue (2) à denture intérieure :
( )( )12
1200 tan2
zzxxinvinv
−−
⋅⋅=− ααα
engrenage non corrigé →== xx 021
engrenage corrigé sans variation d’entraxe →⎭⎬⎫
=+≠≠
xx
xx0
0et 0
21
21
engrenage corrigé avec variation d’entraxe →≠+ xx 021
2.7. METROLOGIE DES ENGRENAGES
2.7.1. Pignon à denture extérieure Le principe repose sur le fait qu’il existe toujours deux profils ayant une normale commune La cote séparant les deux normales est appelée cote sur k dents kE
ENSETP - 12 - S. AGBANGLANON
a) Détermination de k
( ) ⎟⎠⎞
⎜⎝⎛⋅−=
zk πβ 21
( )zz
k ππα +⎟⎠⎞
⎜⎝⎛⋅−=
212 0
( ) ⎟⎠⎞
⎜⎝⎛⋅−=
zk πα 122 0
Alors 12
2 0 +⎟⎠⎞
⎜⎝⎛ ⋅⋅
=παz
k
D’où 210 +
⋅=
παz
k dans la relation ci contre 0α doit être en radian

Construction Mécanique
On choisit la valeur entière la plus proche du résultat pour k.
O
Ek
A B
B'A'
π/z
β
2α0
α0α0
Figure 2-11 : cote sur k dents pour un engrenage extérieur
b) Détermination de kE
kE permet le calcul du coefficient de déport BCCABABAEk
)))+==′′=
( ) ( ) 00 cos11 απ ⋅⋅⋅−=−= mkPbkCA)
et ⎥⎦
⎤⎢⎣
⎡⋅+== 0
0
0 2 αinvrS
rbSbBC)
avec ⎟⎠⎞
⎜⎝⎛ ⋅⋅+= 000 tan2
2απ xmS
⎥⎦
⎤⎢⎣
⎡⋅+⎟
⎠⎞
⎜⎝⎛ ⋅⋅++⋅⋅⋅−= 00
0
000 2tan2
2cos)1( ααπαπ invx
rm
rbmkEk
00000 sin2)21(cos ααπα ⋅⋅⋅+⎥⎦
⎤⎢⎣⎡ ⋅+⋅−⋅= xminvzkmEk
⎥⎦⎤
⎢⎣⎡ ⋅⋅+⋅+⋅−⋅= 0000 tan2)
21(cos ααπα xinvzkmEk
2.7.2. Cote sur piges Seule méthode utilisable pour les dentures intérieures, 2 cas peuvent se présenter
Z pair (figure 2-12) ( )RC Gp −⋅= ρ2
Où R est le rayon de la pige
ENSETP - 13 - S. AGBANGLANON
Z impair (figure 2-13)

Construction Mécanique
( )
⎟⎠⎞
⎜⎝⎛ ⋅
−⋅=
⎟⎠⎞
⎜⎝⎛ ⋅
=
2cos
2
2cos z
Rz
CC Gp
i πρ
π
GG
rbα
ρcos
=
O
ρG
Cp
z impair
Ci
O
ρG
πz/2
Figure 2-12 : cote sur piges pour un nombre de dents
pair Figure 2-13 : cote sur piges pour un nombre de dents
impair
Détermination de Gα
G
A
rb
ρG
PGK
R
αG
θG
On fait rouler la pige sur le flanc de la dent alors G décrit une courbe parallèle au flanc
APPKAK G
)))+=
RrbSb G +⋅= θ21
Avec GG invαθ = Ainsi
rbRSbinv G
121
⋅⎟⎠⎞
⎜⎝⎛ −=α
ENSETP - 14 - S. AGBANGLANON
Figure 2-14 :

Construction Mécanique
2.8. CONDUITE 2.8.1. Engrenage extérieur
Premier contact au point A → longueur AI → conduite d’approche Dernier contact au point B → longueur IB → conduite de retraite
totale conduite delongueur =+= IBAIAB (longueur d’action. Symbole : ) αgPour avoir une continuité du mouvement il faut que :
PbAB ≥ Rapport de conduite :
PbAB
=αε
En fonctionnement courant 3,1=αε
O2
ω2
B
A
I
H1
H2N2 M2
ra1 r1
rb1
rb2
ra2r2
O1
Figure 2-15 : Expression des longueurs de conduite
A AIB += IBIHAHAI 11 −=
ENSETP - 15 - S. AGBANGLANON
111112
12
12
1 et cosor aaa hrrrrbrbrAH +=⋅=−= α

Construction Mécanique
( ) α221
211
21 cos ⋅−+= rhrAH a
( ) α221
2111 cos ⋅−+= rhrAH a
αααα sintancostan 1111 ⋅=⋅⋅=⋅= rrrbIH
D’où ( )[ ] αα sincos 1
21221
211 ⋅−⋅−+= rrhrAI a
De même IHBHIB 22 −=
( )[ ] αα sincos 2
21222
222 ⋅−⋅−+= rrhrIB a
On a απ cos⋅⋅= mPb
Et απαε cos⋅⋅
+=
mIBAI
En posant m
hY
mh
Y aa 22
11 ==
2
22
1
11
YzN
YzN ==
Il vient 2211 UYUY ⋅+⋅=αε
Où ⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅−⎟
⎟⎠
⎞⎜⎜⎝
⎛⋅++
⋅= αα
απsin
2sin
41
cos1 1
21
22
111
NNNU
Et ⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅−⎟
⎟⎠
⎞⎜⎜⎝
⎛⋅++
⋅= αα
απsin
2sin
41
cos1 2
21
22
222
NNNU
ENSETP - 16 - S. AGBANGLANON
2.8.2. Engrenage intérieur La roue 1 est celle à denture extérieure et la roue 2 est celle à denture intérieure De manière analogue aux engrenages extérieurs on a :
BIAIAB ′+= Avec ( )[ ] αα sincos 1
21221
211 ⋅−⋅−+= rrhrAI a
Et ( )[ ] 2122
22
222 cos sin αα ⋅−−−⋅=′ rhrrBI a En posant toujours
mh
Ymh
Y aa 22
11 == (négatif) (positif)
2
22
1
11 Y
zNYzN ==
Nous parvenons à une expression de la forme 2211 UYUY ′⋅+⋅=αε
Avec ⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅−⎟
⎟⎠
⎞⎜⎜⎝
⎛⋅++
⋅= αα
απsin
2sin
41
cos1 1
21
22
111
NNNU
Et ⎥⎥⎦
⎤
⎢⎢⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛+−⋅−⋅
⋅=′
21
22
222
2 1sin4
sin2cos
1 NNN
U αααπ