Embed Size (px)
Citation preview

T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
DEMİRYOLU GEÇİTLERİ İÇİN GÜVENLİK VE HABERLEŞME
SİSTEMLERİ
BİTİRME PROJESİ
228402 BİLGE AKŞAN
228444 ARMAN AŞÇIOĞLU 228419 ALİ KEMAL KIRCI 228455 ALİ OSMAN ER
Danışman
Yrd. Doç. Dr. ADNAN CORA
Mayıs, 2014
TRABZON

T.C.
KARADENİZ TEKNİK ÜNİVERSİTESİ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
DEMİRYOLU GEÇİTLERİ İÇİN
GÜVENLİK VE HABERLEŞME
SİSTEMLERİ
BİTİRME PROJESİ
228402 BİLGE AKŞAN 228444 ARMAN AŞÇIOĞLU
228419 ALİ KEMAL KIRCI 228455 ALİ OSMAN ER
Danışman
Yrd. Doç. Dr. Adnan CORA
Mayıs, 2014
TRABZON

i
LİSANS BİTİRME PROJESİ ONAY FORMU
Bilge AKŞAN, Arman AŞÇIOĞLU, Ali Kemal KIRCI ve Ali Osman ER
tarafından Adnan CORA yönetiminde hazırlanan “DEMİRYOLU
GEÇİTLERİ İÇİN GÜVENLİK VE HABERLEŞME SİSTEMLERİ” başlıklı
lisans tasarım projesi tarafımızdan incelenmiş, kapsamı ve niteliği
açısından bir Lisans Bitirme Projesi olarak kabul edilmiştir.
Danışman : Yrd. Doç. Dr. Adnan CORA ………………………………
Jüri Üyesi 1 : Doç. Dr. Ali GANGAL ………………………………
Jüri Üyesi 2 : Yrd. Doç. Dr. Haydar KAYA ………………………………
Bölüm Başkanı : Prof. Dr. İ. Hakkı ALTAŞ ………………………………

ii
ÖNSÖZ
Bu kılavuzun ilk taslaklarının hazırlanmasında emeği geçenlere,
kılavuzun son halini almasında yol gösterici olan kıymetli hocam Sayın
Adnan CORA’ya şükranlarımı sunmak istiyorum. Ayrıca bu çalışmayı
destekleyen Karadeniz Teknik Üniversitesi Rektörlüğü’ne Mühendislik
Fakültesi Dekanlığına ve Elektrik-Elektronik Mühendisliği Bölüm
Başkanlığına içten teşekkürlerimi sunarım.
Her şeyden öte, eğitimim süresince bana her konuda tam destek veren
aileme ve bana hayatlarıyla örnek olan tüm hocalarıma saygı ve sevgilerimi
sunarım.
Bilge AKŞAN
Arman AŞÇIOĞLU
Ali Kemal KIRCI
Ali Osman ER
Trabzon 2014

iii
İÇİNDEKİLER
Sayfa No
LİSANS BİTİRME PROJESİ ONAY FORMU i ÖNSÖZ ii İÇİNDEKİLER iii
ÖZET v ŞEKİLLER DİZİNİ vi
SEMBOLLER VE KISALTMALAR vii 1. GİRİŞ 1 1.1. Demiryolu Geçitleri İçin Güvenlik ve Haberleşme Sistemi 1
1.2. Hemzemin Geçit Kontrol Sistemi(HGKS) 1 1.3. Hemzemin Geçit Kontrol Sistemleri ile İlgili Literatür Çalışmaları 3
1.3.1. Hemzemin Geçit Bölgeleri için Görüntüleme Sistemi ile Güvenlik Kontrolü
3
1.3.2. Demiryolu Sinyalizasyon Sistemi Bileşenlerinin Otomasyon Petri
Ağları ile Modellenmesi ve PLC ile gerçeklenmesi
3
1.3.3. Hemzemin Geçitlerde Güvenlik Otomasyonu 4
1.3.4. Türkiye’de Kullanılan Tren Kontrol Sistemlerinin Birleştirilmesi ile Oluşturulması Önerilen Türkiye Tren Kontrol Sistemi (TTCS) Kavramı İçerisinde Bir Alt-Sistem Olarak: Yenilikçi Bariyerli Hemzemin Geçit
Tasarımı
4
1.3.5. Türkiye’de Kullanılan Tren Kontrol Sistemlerinin Birleştirilmesi ile
Oluşturulması Önerilen Türkiye Tren Kontrol Sistemi (TTCS) Kavramı İçerisinde Bir Alt-Sistem Olarak: Yenilikçi Bariyerli Hemzemin Geçit Tasarımı
5
2.TEORİK ALTYAPI 6 2.1. 555 Entegre 6
2.2. Servo Motor 7 2.3. Kızılötesi Sensör 7 2.4. Arduino 8
2.5. Arduino Modelleri 8 2.6. Foto Direnç 10
2.7. Ethernet Kartları 10 2.8. LED 11 3. DENEYSEL ÇALIŞMALAR 13
3.1. Işık Sistemi 13 3.2. Otomatik Demiryolu Kapı Kontrolü 14
3.3. Tren İstasyonunda Durup Kalkma 15 3.4. Twitter Haberleşmesi 19 4. SONUÇLAR 20
5. YORUMLAR VE DEĞERLENDİRME 21 KAYNAKLAR 22

iv
EKLER EK-1 IEEE Etik Kuralları 23
EK-2 Disiplinler arası Çalışma 28 EK-3 Standartlar ve Kısıtlar Formu 29
EK-4 Kontrol Devreleri için Arduino Kaynak Kodları 31 EK-5 Hemzemin Geçit Projesi için Maliyet Analizi 32 EK-6 Çalışma Takvimi 33
ÖZGEÇMİŞLER 34

v
ÖZET
Günümüzde dünya nüfusunun büyük bir hızla artmasıyla özellikle büyük şehirlerde
trafiğe bağlı sorunlar oluşmaktadır. Hemzemin geçitler demiryolu trafiğinin karayolu ile
iç içe geçtiği bölgeler olması nedeniyle demiryolu hatlarındaki güvenlik açısından en
riskli bölgeler olarak kabul edilmektedir. Demiryolu ağının karmaşıklık kazanmasıyla
birlikte tren kazaları da artmaktadır. Ayrıca uyarı işaretlerinin önemsenmemesi, cihaz
arızaları veya dikkatsizlik gibi insan kaynaklı hatalar çoğu zaman kaza ile
sonuçlanmaktadır. Bu nedenle hemzemin geçitlerdeki bu kazaları azaltmak amacı ile
güvenli, daha iyi haberleşebilen merkezi kontrol sistemli,yolculara daha iyi bir sistem
sunabilen demiryolu projelerine yönlenilmektedir.
Bu projenin amacı, yeni bir şey üretmekten çok mevcut problemleri azaltmaktır.
Bununla birlikte genç nesile elektronik ve mekaniğin basit içerikleriyle onlara
mükemmel fırsatlar sunar ve konuyla ilgili bilimsel araştırma yapmak için onları teşvik
eder,özendirir.

vi
ŞEKİLLER DİZİNİ
Sayfa No
Şekil 1 : HGKS’nin sağlayabileceği temel işlevler………………………….............2
Şekil 2 : HGKS çalışma yapısı……………………………………………… ............2
Şekil 3 : 555 Yapısı…………………………………………………………. ............6
Şekil 4 : Kızılötesi sensor…………………………………………………… ...........7
Şekil 5 : Arduino Uno yapısı………………………………………………... ...........9
Şekil 6 : Foto direnç………………………………………………………… ..........10
Şekil 7 : Etherrnet kartı (Arduino zırhı)…………………………………….. ..........11
Şekil 8 : LED……………………………………………………………….. ..........11
Şekil 9 : LDR’li ışık sistemi devresinin Proteus gösterimi…………………. ..........13
Şekil 10 : Işık devresinin yapılmış hali………………………………………. ..........14
Şekil 11 : Bağlantı diyagramı……………………………………………...…. .........15
Şekil 12 : Astable zamanlayıcıdan ve değil kapısından çıkış………………… .........17
Şekil 13 : Otomatik durma, hareket etme devresinin proteus gösterimi…….. ...........18
Şekil 14 : Otomatik durma, hareket etme devresi……………………………. ..........18
Şekil 15 : Otomatik durma, hareket etme devresi……………………………. ..........19

vii
ÇİZELGELER DİZİNİ
Sayfa No
Çizelge 1. Ldr’li ışık devresi için ortam karanlık iken simülasyon sonuçları… 13
Çizelge 2. Ldr’li ışık devresi için ortam aydınlık iken simülasyon sonuçları… 13
Çizelge 3. Kızılötesi sensörünün çıkış gerilimleri…………………………….. 15
Çizelge 4. Maliyet analizi……………………………………………………... 32
Çizelge 5. Hemzemin Geçit sistemi projesinin çalışma takvimi……… ……… 33

viii
SEMBOLLER VE KISALTMALAR
A Amper
AC Alternating Current (Alternatif Akım)
DC Direct Current (Doğru Akım)
HGKS Hemzemin Geçit Kontrol Sistemi
I/O Input/Output (Giriş/Çıkış)
IR Infrared Remote
kB kiloByte
kHz kiloHertz
LDR Light Depended Resistors (Işığa Bağlı Direnç)
LED Light Emitting Diode (Işık Yayıcı Diyot)
MHz MegaHertz
mA Miliamper
mV miliVolt
nF nanoFarad
nV nanoVolt
OPA Otomasyon Petri Ağı
PLC Programlanabilir Lojik Kontrolör
TTCS Tren Kontrol Sistemi
SCADA Supervisory Control and Data Acquisition
(Uzaktan Kontrol ve Gözleme Sistemi)

1
1. GİRİŞ
1.1. Demiryolu Geçitleri İçin Güvenlik ve Haberleşme Sistemi
Demiryolları dünyanın en eski ulaşım ve yük taşıma araçlarından biridir. Ülkemizde
ilk demiryolu hattının yapımı 1856 yıllarına dayanmaktadır.Son yıllarda teknolojide
meydana gelen gelişmeler demiryolu taşımacılığının önemini bir kez daha artırmıştır.
Demiryolu ulaşımında en önemli amaç güvenli ulaşımın sağlanmasıdır.Gün geçtikçe
geliştirilen teknolojiler ve gelişmeler kazaların azalmasına sağlasa da bu kazalar çoğu
zaman ölümle sonuçlanmaktadır.Hemzemin geçitler, ülkemizde ve dünyada her yıl
önemli ölçüde can ve mal kaybının meydana geldiği yüksek risk içeren noktalar olarak
kabul edilmektedir.
Hemzemin geçit kazalarının azaltılması için oluşturulmuş sistemler Hemzemin Geçit
Kontrol Sistemi (HGKS) olarak adlandırılmaktadır. Bu sistemler bariyersiz bekçisiz,
bariyerli bekçili ve bariyerli otomatik kumandalı olmak üzere üç tipte görülmektedir.
Bariyersiz bekçisiz tiplerde, bir güvenlik kontrolü yoktur ve geçiş üstünlüğü trenlere
aittir. Aynı zamanada geçitte oluşabilecek herhangi bir kaza karayolunda seyreden taşıtların
sorumluluğundadır. Bariyerli bekçili tiplerde, trenin geleceği insanlar tarafından
belirlenerek bariyerlerin belli bir sure insan kontrolünde kapalı tutulması sağlanmaktadır.
Bariyerli otomatik kumandalı sistemde, trenin yaklaştığı raylarada hemzemin geçitten belli
bir mesafe uzakta yerleştirilen kablolar yardımıyla rröle evlerine bir kısa devre akımı
gönderilerek geçitin karayolu trafiğine kapanması sağlanmaktadır.
1.2. Hemzemin Geçit Kontrol Sistemi (HGKS)
Hemzemin Geçit Kontrol Sistemi, geçitlerde güvenli geçişin sağlanması için
kullanılan uyarı, bilgilendirme ve engelleme sistemlerini kapsayan her türlü güvenlik
kontrolünü ifade etmek için kullanılmaktadır. Şekil-1’de bir HGKS’nin sağlayabileceği
temel işlevler görülmektedir.

2
Şekil 1. HGKS’nin sağlayabileceği temel işlevler [1]
Şekilde yer alan her bir işlev çeşitli teknik ve yöntemlerle karşılanabilir.Tespit ve
güvenlik işlemleri iki taraflı, karayolu trafiği ve demiryolu olarak sağlanmaktadır.
Bütün HGKS sistemlerinde bu işlevlerin tamamının gerçekleştirmesi beklenmez. Bazı
sistemlerde hemzemin geçit bölgelerinde karayolu açısından geçit kontrol edilerek trene
geçit güvenliğinin olmadığı bilgisi bir takım bilgilendirme ve uyarı yolları ile
aktarılırken bazı sistemlerde tren tespiti yapılıp ona göre geçit bariyerleri kapatılarak
güvenlik uygulaması gerçekleştirmektedir.
HGKS sisteminde tren tespiti ray devresi, dingil sayıcı ve gözcü kullanımı gibi
yöntemlerle gerçekleştirilmekte olup bu bilgi kontrol ünitesi yardımıyla hemzemin geçit
bariyerlerinin otomatik veya elle kontrol edilmesi sağlanmaktadır. Şekil-2’de
HGSK’nın çalışma yapısı gösterilmiştir.
Şekil 2. HGKS çalışma yapısı [2]

3
Şekil-2’de görüldüğü gibi ray üzerinde tren tespiti için ray devreleri
kullanılmaktadır.
Ray devreleri trenlerin konumlarını belirlemek amacı ile demiryollarında kullanılan
basit elektronik elemanlardır. Türkiye’de bulunan demiryollarında AC veya DC Ray
devreleri vardır. Ray devreleri, kontrol ünitesine trenlerin konum bilgilerini
iletmektedir. Halen kullanımda olan bu sistemin güvenilirlik, kararlılık, denetim ve
bakım gibi bazı kısıtları bulunmaktadır.
1. 3. Hemzemin Geçit Kontrol Sistemleri ile İlgili Literatür Çalışmaları
1. 3. 1. Hemzemin Geçit Bölgeleri için Görüntüleme Sistemi ile Güvenlik
Kontrolü
Bu sistemde, tren raylar üzerinde belli noktalardan geçerken bir röle evine kablolar
yardımıyla bir kısa devre akımı gönderilerek geçitin karayolu trafiğine kapanması
sağlanmaktadır. Bu çalışmada, hemzemin geçit güvenliğinin sağlanabilmesi için var
olan sistemdeki güvenilirlik kısıtlarını ortadan kaldırabilecek bir görüntüleme sistemi
sunulmuştur. Sunulan görüntüleme sisteminde hemzemin geçit bölgelerinin öncesinde
ve sonrasında belirli noktalara yerleştirilecek kameralar yardımı ile belirli aralıklarla
görüntüler alınmıştır.
Alınan bu görüntüler üzerinde görüntü işleme algoritmaları kullanılarak birtakım
önişlemler gerçekleştirilmiş ve daha sonra da kenar bulma teknikleri yardımıyla
görüntüdeki ray üzerinde tren olup olmadığının tespiti yapılmıştır [3].
1. 3. 2. Demiryolu Sinyalizasyon Sistemi Bileşenlerinin Otomasyon Petri Ağları ile
Modellenmesi ve PLC ile gerçeklenmesi
Demiryollarında trafiğin güvenli olarak gerçekleştirilebilmesi güvenilir
sinyalizasyon ve anklaşman sistemlerinin tasarımı ile sağlanmaktadır. Son yıllarda
hatada güvenli PLC’lerdeki (Programlanabilir Lojik Kontrolör) gelişmeler, bu tür
sistemlerin demiryolu anklaşman ve sinyalizasyonunda kullanılmalarına olanak
sağlamaktadır. Her ne kadar hatada güvenli PLC’lerin çalışma bozuklukları kabul
edilebilir düzeyde olsa da, programlamada yapılabilecek mantıksal hatalar demiryolu
trafiğinin aksamasına hatta ölümcül kazalara neden olabilmektedir.

4
Sinyalizasyon ve anklaşman sistemlerinin biçimsel yöntemler kullanılarak
tasarlanması programlama esnasında oluşabilecek mantıksal hataların ortadan
kaldırılması amacıyla daha uygun olmaktadır. Bu çalışmada bir demiryolu
sinyalizasyon ve anklaşman sisteminin PLC ile kontrolü için uygun Otomasyon Petri
Ağı (OPA) modeli oluşturulmuş ve hazırlanan SCADA yazılımı ile olası tüm senaryolar
test edilerek yapılan tasarımın güvenilirliği sağlanmıştır [4].
1. 3. 3. Hemzemin Geçitlerde Güvenlik Otomasyonu
Bu proje hemzemin geçitlerde kullanılmak üzere oluşturulmuş bir otomasyondur.
Sistemde ikaz lambalarının kontrolü, hareketli kolların kontrolü ve trenin kontrolü
algılayıcı olarak kullanılan, konum değiştirebilen anahtarlar vasıtasıyla yapılmaktadır.
Kullanılan algılayıcıların gerçek ortamda daha değişik olacağı açıktır. Otomatik
hemzemin geçitlerinde güvenlik sistemi, otomasyon teknolojisi konusunu
kapsamaktadır. Bu proje çalışmasında LEGO parçacıklarından oluşan Fischertechnik
robot montaj seti kullanılmıştır [5].
1. 3. 4. Türkiye’de Kullanılan Tren Kontrol Sistemlerinin Birleştirilmesi ile
Oluşturulması Önerilen Türkiye Tren Kontrol Sistemi (TTCS) Kavramı İçerisinde
Bir Alt-Sistem Olarak: Yenilikçi Bariyerli Hemzemin Geçit Tasarımı
Bu projede Türkiye’de kullanılan tren kontrol sistemlerine farklı bir alt-sistem
olarak; bir hemzemin geçit sistemi tasarımı önerilmektedir.Önerilen bu alt-sistemde,
bariyerler yatay hareket etmektedir ve bariyerlerin hareketi için güneş enerjisinden
faydalanılmaktadır.Ayrıca bariyerlerin güvenli ve verimli bir şekilde çalışmasını
sağlayan iletişim hiyerarşisi tasarımının temeli oluşturulmaktadır.
Sistemin yenilikçi özelliklerinden biri bariyerler bir merkez tarafından kontrol
edilerek ilgili hareketli demiryolu araçlarına olası kazaları önlemek için aktarımda
bulunabilmesidir. Bu sistemin şehir içi hafif raylı sistemlerde, tramvay hatlarında ve
şehirlerarası hatlarda yaygın kullanabilmesi, sistemin kendi yapısından dolayı sağladığı
avantajları ve bakım onarım giderlerinin yerli sermayeye dönüştürebilirliği açısından,
belediyeler ve raylı sistem işletmelerine ve ülke ekonomisine katkı sağlanmış
olacaktır[6].

5
1. 3. 5. Türkiye’de Kullanılan Tren Kontrol Sistemlerinin Birleştirilmesi ile
Oluşturulması Önerilen Türkiye Tren Kontrol Sistemi (TTCS) Kavramı İçerisinde
Bir Alt-Sistem Olarak: Yenilikçi Bariyerli Hemzemin Geçit Tasarımı
Projenin amacı, ülkemizde bulunmakta olan tren kontrol sistemlerine yenilikçi bir
alt-sistem önerilmiştir. Bu sistemde, hareketi için güneş enerjisinden faydalanabilen
bariyerler ve bariyerlerin verimli ve güvenli bir şekilde çalışmasını sağlayan iletişim
hiyerarşisinin basamaklarından oluşturmaktadır. Bariyerlerin bir merkez tarafından
kontrol edilmesi ve olası kazaları önlemek için ilgili araçlara bilginin aktarımasını
sağlaması sistemin yenilikçi özelliklerindendir [7].

6
2. TEORİK ALTYAPI
Bu bölümde projenin tamamlanması için gereken donanım, yazılım ve yararlanılan
teorilerle birlikte cihazımız hakkında bilgiler verilmiştir.
2. 1. 555 Entegre
555 entegresi bir zamanlayıcıdır. Karşılıklı 4 bacağı olmak üzere toplam 8 bacağı
vardır. 555 entegresi simetrik ve asimetrik kare dalga osilatör üretir. Genellikle basit
elektronik devreler de kullanılır.Elektronik dünyasının vazgeçilmez entegrelerinden
biridir.
555 entegresinin özellikleri:
+4.5 V ile +16V arasındaki beslenme gerilimleriyle çalışabilmekte,
Çıkışından 200 mA kadar akım çekebilmekte,
Zamanlama için kullanıldığında bir RC devresi yardımıyla süresi milisaniye ile
dakikalar arasında değişen darbeler elde edebilmekte,
Zamanalama periyodu besleme gerilimine bağlı değildir.
0 V 1 8 4.5-15 V
tetikleme 2
7 deşarj
çıkış 3 555 timer 6 tutma
reset 4 5 kontrol
Şekil 3. 555 yapısı [8]
1) Toprak: Topraklama bacağı (0 V)
2 )Tetikleme: Bu bacağı tetikleme ayağı olarak kullanılır.
3 )Çıkış: 8 tane bacak olan bu devrede tek çıkış vardır o da 3 numaralı bacaktır.
4)Reset: Bu bacak OFF olduğunda devre başa döner ve Q çıkışı OFF olur.Bu bacağını
öteki bacaklarla bağlantısı yoktur.
5)Kontrol: Bu bacaklar 2\3 Vcc gerilim alınan noktaya bağlıdır.İstenirse gerilim
değiştirilerek zamanlama periyodu değiştirilebilir.

7
6)Tutma: Gerilim 2/3 Vcc üzerinde olduğu durumlarda flip-flop reset gönderir.
7)Deşarj: Transistörün kolektörüne bağlıdır.
8)Besleme: +4.5V ile +16V arasındaki değerlerde gerilim verilebilir.
2. 2. Servo Motor
Sistemin son kontrol mercii olan kontrolör servo motordur. Servo motorlar hem AA
hem de DA olarak çalışabilme özelliğine sahiptir. Servo motorlar genelde hız ve
konum algılamada kullanıldıkları için ona uygun olarak tasarlanırlar.
Servo motorlarda aranan özellikler; hızlı çalışabilmeli, kararlılık noktası sabit ya da
titreşimi az olması istenir. Devir sayısı hıza bağlı olarak düzgün artmalıdır.
2. 3. Kızılötesi Sensör
Kızılötesi ışınım, dalga boyu görünür ışıktan uzun fakat mikrodalgalardan daha kısa
olan elektromanyetik ışınımdır. Kızılötesi ışınımın dalga boyu 1000 mikrometre ile
750 nanometre arasındadır.Tüm cisimler kızılötesi enerji yayarlar. Kızılötesi ışıma
birbirini gören farklı sıcaklıktaki cisimler arasındaki ısı transferi olup ısıl enerji,
kızılötesi dalga boyunda iletilir.IR sensörler, kızılötesi dalga boyunda iletilen enerjiyi
görülebilir ışık spektrumu olarak görüntüler [9]. Şekil 4.’te projemizde kullanılan
kızılötesi sensör gösterilmektedir.
Şekil 4. Kızılötesi sensör

8
2. 4. Arduino
Arduino’nun en iyi tarafı kolay kullanılabilir, yazılımının basit olması ve herhangi
bir donanıma ihtiyaç duymamasıdır. Arduino aynı zamanda bir fiziki proglamlama
platformudur. Fiziki programlama dış dünya ile etkileşimde bulunan sistemlerin
programlanması demektir. Arduino kartların devre şemaları açıktı. Bu yüzden isteyen
herkes baskı devrelerini oluşturabilir veya kartlar hazır yapılmış halde satın alınılabilir.
Arduino mikroişlemciler için kolaylaştırıcı bir geliştirme ortamı sunar. Arduino
kartlarının üstünde 8-bit Atmel AVR mikroişlemcisi bulunur. Ancak farklı arduino
kartlarında Atmega8, Atmega168, Atmega328, Atmega1280, Atmega2560
mikroişlemcisi de bulunur. Bu mikroişlemciler wiring tabanlı olarak arduinonun
kendine has bir programlama dili ile direk olarak programlanabilir [10].
Arduino programlamada C/C++/Java temelli bir dil kullanılıyor.
Giriş pinlerine bağlayacağımız algılayıcılar ile çıkışta bağlı olan cihazları kontrol
edebiliriz. Bu cihazlar ışık, ısı, ses, seviye ve motor kontrol eden cihazlar olabilir.
2. 5. Arduino Modelleri
Farklı amaçlara göre Arduino’nun birçok çeşidi ve ‘Shield’ adı verilen pek çok
donanım eklentileri vardır.
1. Arduino Uno
2. Arduino Mega
3. Arduino Lilypad
4. Arduino Adk
5. Arduino Ethernet
6. Arduino Bluetooth
7. Arduino Mini ve Mini Pro

9
8. Arduino Nano
9. Arduino Leonardo
Bütün arduino çeşitleri aynı şekilde programlanabilmekle birlikte aralarında çeşitli
farklılıklar bulunmaktadır. Çalışma gerilimler, giriş/çıkış sayıları, güç tüketimleri, çevre
birimlerinin sayısı ve boyutları farklı olabiliyor. Bu kartlardan bazıları gömülü olarak
tasarlandığı için donanımsal programlama arayüzü bulundurmazken; bazıları doğrudan
USB üzerinden programlanabilmektedir. Ayrıca bazıları 3.7V pil ile beslenirken bazıları
ise en az 5V beslemeye ihtiyaç duymaktadır.
En bilinen ve kullanışlı Arduino modeli, Arduino Uno’dur. Şekil 5.’de yapılan
projede kullandığımız. Arduino modeli gösterilmektedir.
Şekil 5. Arduino Uno Yapısı [11]
Arduino UNO’nun sahip olduğu özellikler, Atmega328 mikrodenetleyici, USB ve
adaptör bağlantı portları, gerilim regülatörünün olması, ayarlanabilir çalışma geriliminin
olması, digital ve analog giriş/çıkışa sahip olması,farklı gerilimler için farklı
frekanslarda çalışabilir olmasıdır.

10
2.6. Foto Direnç (LDR) (Light Depending Resistors)
Şekil 6. Foto Direnç [12]
Foto direnç başka adlarıyla; ışığa bağımlı direnç ya da fotosel hücre olup ışığa
duyarlı değişken bir dirençtir. Yukarıdaki Şekil 6.’da projemizde kullandığımız LDR’ler
gösterilmektedir. Bir foto direncin direnci üzerine düşen ışık yoğunluğuyla ters orantılı
olarak artar ya da azalır. Bunun diğer anlamı foto iletkenliktir. Bir foto direnç ışığa
duyarlı detektör devrelerinde sıkça kullanılmakta olup görevi sayesinde, ışık ve
anahtarlama devrelerini aktif hale getirir. Foto dirençler yüksek dirençli yarı iletkenler
olup, ışıklı ortamda dirençleri birkaç yüz ohm kadar düşük olabilirken, karanlık
ortamlarda dirençleri birkaç megaom gibi yüksek değerlere çıkabilmektedir. Foto direnç
için üzerine düşen ışığın frekans belli bir değeri aşarsa, foto dirençte olan ve enerji
verilerek koparılabilen elektronlar verilen ışığın şiddetine bağlı olarak iletim bandı içine
atlarlar. Oluşan serbest elektronlar (ve onların delik çiftleri), direncini düşürücü etki
yaparak, elektrik akımının geçişine olanak sağlarlar. Direnç aralığı ve duyarlılığı bir
foto direnç için bağlandığı cihaza bağlı olarak yada kullanılan belirli aralıktaki dalga
boyu bantlarına karşılık önemli ölçüde farklılık gösterebilir.
2. 7. Ethernet Kartları
Ağ arabirim kartı, ağ bağdaştırıcısı, LAN adaptörü , NIC( network interface
controller) ve benzeri terimlerle adlandırılan ethernet kartı ağ arabirim denetçisi
olarak ağdan bilgisayara yada bilgisayarı başka bir bilgisayara bağlayan bir bilgisayar
donanımıdır. Düşük maliyetli ve hemen hemen her yerde bulunabilen Ethernet
standardı son teknoloji bilgisayarlarda anakarta yerleşik olarak üretilmektedir. Ağ
denetleyicisi katmanı fiziksel katman olup; Ethernet, Wi-Fi ya da Token Ring gibi veri

11
bağlantı katmanı standardını kullanarak iletişim kurar bunu yaparken de elektronik
devrelere ihtiyaç duyar. Ethernet ağında her bilgisayar için en az bir ethernet kartı
olmalıdır. Ethernet kartlarının özelliklerinden birisi bilgisayarlar arası (ağ üzerinden)
iletişim sağlamaktır. Şekil 7.’de projemizde kullanılan Ethernet kartı gösterilmiştir.
Şekil 7. Ethernet Kartı (Arduino Zırhı) [13]
2. 8. LED (LightEmittingDiod)
P-N ekleminden oluşmaktadır. Anoduna “+” işaretli gerilim geldiğinde ışık yayar,
“-“ işareti geldiğinde söner. Çalışma ilkesi elektronları yüksek enerji bandından alçak
enerji bandında geçerken yaydıkları ışığa dayanmaktadır. Bu ışığın dalga boyu,
kullanılan malzemeye bağlı olarak değişir.
LED’ler (Işık yayan diyotlar),küçük gerilimler altında akımla çalışan elemanlardır.
Şekil 8.’de LED gösterilmektedir. Tipik çalışma akımları 20mA civarında olup bu akımı
aşmamak için, yani aşırı akıma karşı bunları korumak için genellikle bir öndirencin
eşiğinde kullanılırlar. LED’leri aşırı gerilimlere karşı korumak için kendilerine ters
yönde paralel bir diyodun veya zenerdiyodunun eşliğinde kullanılırlar.
Şekil 8. LED [14]

12
LED’ler uygulamada,
*Işıklı uyarı sistemlerinde,
*Optik algılayıcılarda,
*Optik sayıcılarda,
*Sayısal Görüntülemede,
*Optik çiftlerde ışık kaynağı olarak,
*Fiberoptik veri iletim sistemlerinde verici olarak,
*Rakamları oluşturmada,
*Anahtarlama Devrelerinde,
*Modulasyon devrelerinde kullanılırlar [15].

13
3. DENEYSEL ÇALIŞMALAR
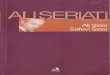
3. 1. Işık Sistemi
Geceleyin tren kazalarının önüne geçmek için, çift ışık sistemi doğrudan lokomotifin
önüne yerleştirilir. Dışarının aydınlığına bağlı olarak ışık yanar veya söner. Dışarıdaki
ışığın aydınlığını saptamak için bir foto rezistör kullanılır. Bunun anlamı bir analog
dijtal dönüştürücüdür. Projemizde yapılan Ldr’li ışık devresi şekil 9.’da gösterilmiştir.
Şekil 9. Ldr’li ışık sistemi devresinin proteus gösterimi
Çizelge 1. Ldr’li ışık devresi için ortam karanlık iken simülasyon sonuçları:
LDR B1 C1 E1 Q1 LAMBA
R büyük
26,34 Mv
4,397 V
0 V İletim Yanar
Çizelge 2. Ldr’li ışık devresi için ortam aydınlık iken simülasyon sonuçları:
LDR B1 C1 E1 Q1 LAMBA
R küçük
633,7 mV
41,5 mV
0 V Kesim Yanmaz
Proteus-Isis programıyla ışık devresi için yapılan simülasyon çalışmasında Tablo
6’daki değerler elde edilmiştir.
Ortam karanlık iken, LDR’nin iç direnci çok yüksektir. +9 voltluk kaynaktan gelen
akım LDR’nin iç direnci çok yüksek olduğundan, Q1 transistörünü iletime sokar ve
böylece led yanar. Ortam aydınlık iken, LDR’nin iç direnci çok düşüktür. +9 voltluk
kaynaktan gelen akım, Q1 transistörü kesime sokar ve lamba söner. Şekil 10.’da ışık
devresinin lehimlenmiş hali gösterilmektedir.
R3330ohm
R41k
R6
100ohm
0.1 LDR1LDR
B19V
Q1BC237
R1470k
D1LED-YELLOW

14
Şekil 10. Işık devresinin yapılmış hali
3. 2. Otomatik Demiryolu Kapı Kontrolü
Hemzemin geçitler, karayolu ve demiryolu trafiğinin iç içe geçtiği bölgeler olması
nedeni ile demiryolu hatlarındaki güvenlik açısından en riskli bölgeleri olarak kabul
edilmektedir. Demiryolu kazaları hemzemin geçitlerde ciddi boyutlara ulaşmaktadır.
Basit elektronik devreler kullanılarak demiryolu geçişleri otomatik olarak kontrol
edilebilir. Tren kesişme noktasına yaklaştığında belirli uzaklığa konulan sensörler
kapıyla iletişime geçerek kapının otomatik olarak hareket etmesini sağlayacaktır. Aynı
zamanda ışık göstergesi ile makinistin ve etrafındaki araç sahiplerinin uyarılması
sağlanabilmektedir. Bu iletişimi 2 tane kızılötesi verici LED ve kızılötesi ışık üreten
alıcılarla sağlanabilmektedir. Bu verici ve alıcı çiplerinin yüzleri birbirine bakacak
şekilde birisi içte diğeri de dışta olmak suretiyle yerleştirilir.
Tren kızılötesi ışınları kestikten 2 saniye sonra kapı motor sistemi yolu bir tarafa
kapatır diğer tarafa açar ve trenin geçişine kadar kapıların durumunu muhafaza eder.
Sermo motorlar mikroişlemci tarafından açma-kapamaya programlı olup kapı
anahtarlamasında kullanılır. Bu sistemde alarm sistemi mevcut olup sistemde yanıp
sönen LED ışığı ve sesli uyarı sistemi bulunmaktadır.
Sonuç olarak, demir yollarında olası durumlara karşı güvenliği artırmak ve iyi bir
haberleşme ağı sunmaktır. Burada ana yollarda kapı geçişler(hemzemin geçitler), acil
durdurmalar, lokomotif ışıklı sistemler twitter ile haberleşmesi ve raylarda haberleşme
yapması bu projenin birçok alanda başarıya ulaşacağının bir göstergesidir.

15
3. 3. Tren İstasyonunda Otomatik Durup Kalkma
Şekil 11. Bağlantı diyagramı
Trenin istasyona geldiğinde otomatik durması ve belli bir süre geçtikten sonra otomatik
olarak hareket etmesi için kullandığımız devreler arasında bulunan ilişki Şekil 11.’deki
diyagramda gösterilmiştir. Şekil 12.’deki kontrol devresinde bulunan opampın “+”
bacağına pil, “-” bacağına ise kızılötesi sensörün dijital çıkışı bağlanmıştır. Kızılötesi
sensörün cisim algılama durumuna göre verdiği dijital çıkış gerilimleri Tablo 2.’de
verilmiştir.
Çizelge 3. Kızılötesi sensörünün çıkış gerilimleri
Cisim algılandığında Cisim algılanmadığında
0,4 V 3,6 V
Opampa referans olması açısında “+” bacağa bağlanan pil 1,5 V olarak seçilmiştir.
Sensör önünden tren geçtiğinde dijital çıkış olarak pilin geriliminden daha küçük bir
değerde gerilim üretir. Bunun sonucunda opamp pozitif beslemesinin değerinde bir
gerilimi çıkış olarak verir. Bu gerilim değeri Q4 transistörünün bazına etki ederek treni
durdurmaya yarayacak olan rölenin bobinlerinden enerji geçmesini sağlar. Enerjilenen
röle bobini normalde açık kontaklarına bağlı kızılötesi verici devresindeki treni

16
durdurmaya yarayan devreyi aktif hale getirir. Opampın verdiği pozitif çıkış gerilimi
aynı zamanda astable zamanlayıcı devresinin ve onun çıkışına bağlanılan değil kapsının
beslemesini aktif hale getirir. Aktif hale gelen zamanlayıcı ilk başta pozitif bir gerilim
değeri üretmesine rağmen değil kapısıyla bu gerilim sıfıra indirilir. İhtiyaç
doğrultusunda hesaplanan belli bir süre sonunda zamanlayıcı sıfır değeri üretmeye
başlar. Bu doğrultuda değil kapısının çıkışından pozitif bir gerilim büyüklüğü alırız ve
bu gerilim Q3 transistörünün bazına etki ederek, infrared verici devresindeki treni
harekete geçirecek sinyalin oluşmasını sağlayan devreyi aktif hale getirir.
Trenin durması enerjisi kesilir kesilmez gerçekleşmektedir. Bu yüzden kızılötesi sensör
istasyonun bulunduğu yere koyulmuş ve tren algılandığı anda zaman farkı olmaksızın
durdurulması sağlanmıştır.
Trenin harekete geçme zamanı hesaplanırken trenin kızılötesi sensörün algılama
mesafesinden ayrılabileceği kadar süre geçmesi hedeflenmiştir. Bunun nedeni treni
harekete geçiren sinyal verildikten sonra eğer durmasına neden olacak sinyal tekrar
verilirse trenin hareket edemeyecek olmasıdır.
Trenin harekete geçme zamanının matematiksel hesabı şu şekildedir:
Trenin boyu: 30 cm
Trenin hızı: 0,2m/sn
Trenin kızılötesinin algılama mesafesinden çıkması için gereken süre:
x=v.t
x=31 cm
v=20cm/sn
t = 31
20 = 1,55 sn olabilecek en küçük süredir.

17
Şekil 12. Astable zamanlayıcıdan ve değil kapısından çıkış
Astable zamanlayıcının süresi ayarlanırken şekil 12’de görülen T2 süresinin 1,55
sn’den büyük olmasına dikkat ettik.
T1= (R1+R2)*C
T2= R2*C
T1= 0,693*(470KΩ+470KΩ)*10µF = 6,5142 sn
T2= 0,693*470KΩ*10µF = 3,2571 sn
T2= 3,2571 sn ise T2>1,55 sn

18
Şekil 13. Otomatik durma, hareket etme devresinin proteus gösterimi
Şekil 14. Otomatik durma, hareket etme devresi

19
Şekil 15. Otomatik durma, hareket etme devresi
3. 4. Twitter Haberleşme Sistemi
En önemli uygulamalarında biri de gelecek trenin yerini ve zamanını yolculara
bildirerek bilgi alışverişi yapmaktır. Bu uygulamanın temel amacı halkı bilinen bir
sosyal ağ ile bilgilendirmektir. Diğer başarılı olduğu alan ise ethernet sitemiyle
haberleşmek için kullanılan mikroişlemcinin çok kullanışlı hale getirilmesidir. Sonuç
olarak herhangi bir zamanda, herhangi bir tren bir istasyona vardığında twitter hesabı
olan tren kullanıcıları bilgileri hesaplarında görebilirler.

20
4. SONUÇLAR
Hemzemin geçit sistemleri ile ilgili geleneksel kontrol yaklaşımıyla gerçekleştirilen
birçok sayıda çalışma yapılmıştır. Bu yöntemlerden farklı bir yöntem kullanılarak
otomasyon sistemlerine farklı bir bakış açısı getirilmiştir. Bu çalışma kapsamında
kontrolör olarak arduino ve Ethernet kartı kullanılıp sistem bu denetleyici aracılığıyla
kontrol edilmiştir.
Projemizi gerçekleştiririken arduino seçmemizdeki asıl amaç kontrol ve gözlemin
aynı anda multimedya kart ile ekran aracılığıyla yapılabilmesi, sisteme ekstra bir
donanım gerektirmeden bir ana ünite ile çalıştırılabilmesi ve programlamasında çeşitli
diller kullanılabilmesidir. Bu sistemin tercih edilmesindeki diğer neden ise diğer alışılan
aynı sistemler yerine dış etkilerden daha az etkilenmesidir.
Bu proje kapsamında yapılan tasarım, simülasyon ve deneysel çalışmalar
anlatılmıştır. Gerçekleştirilen bu hemzemin geçit projesi için bir tren maketi üzerinde
çalışılmıştır.
Bu çalışmada bir sistemin mikro denetleyici yardımıyla nasıl kontrol edilebileceği,
sistemde kullanılan devre elemanlarının seçiminin nasıl yapılabileceği öğrenilmiştir.
Projenin çalışma takvimi EK-6’da verilmiştir.

21
5. YORUMLAR VE DEĞERLENDİRME
Tasarlanan sistemin çalışmasını test etmek amacıyla, ilk olarak Proteus ISIS şematik
çizim programında devrelerin simülasyon çalışmaları yapılmış ve daha sonra devre
elemanları kullanılarak laboratuvar ortamında devreler gerçekleştirilmiştir. Sistemin
yazılımsal kısmı için arduino Ethernet kartı ile twitter programında arayüz oluşturulup
C tabanlı program dilinde programlaması yapılmıştır. Tasarlanan sistem üzerinde
yapılan çalışmalar sonucunda sistemin yazılımsal ve donanımsal açıdan uyumlu bir
şekilde çalıştığı görüldükten sonra sistem maket üzerinden gerçekleştirilmiştir.
Oluşturulan bu çalışmanın konuyla alakalı pek çok projeden farklı noktası gereği
otomatik kontrollü hemzemin geçit sistemleri uygulamalarına yeni bir bakış açısı ve
yeni bir uygulama alanı getirmiştir, var olan uygulamalara da çeşitlilik katmıştır

22
KAYNAKLAR
[1]. TCDD, 2008, Devlet Demiryolları İstatistik yıllığı 2004 -2008, 41-65
[2]. K. Akın, M.S. Durmuş, M.T. Söylemez, “Otomatik Kontrol Ulusal Toplantısı”,
Gebze, 2010.
[3]. B. A. YALÇIN, “Otomatik Kontrol Uluslararası Toplantısı”,TOK2013,
Malatya, 20-25 Eylül 2013.
[4]. S. Saygın, İ. Yakın, M.S. Durmuş ve M.T. Söylemez, “Petri Ağlarıyla Demiryolu
Makas Bölgelerinin Anklaşman Ve Sinyalizasyonu Tasarımı,” Otomatik Kontrol Ulusal
Toplantısı, TOK’09, İstanbul, 2009.
[5]. M. Özköy, “Demiryolu Hemzemin Geçitler için Alınacak Önlemler ve
Uygulamaları Toplantısı”, İstanbul, 2011.
[6]. Anonim, T.C. Devlet Demiryolları İstatistik Yıllığı 2003-2007. Araştırma Planlama
ve Koordinasyon Dairesi Başkanlığı İstatistik Şubesi, İlkay Ofset Matbaacılık,
Ankara,2008.
[7]. Anonim, (2010). TCDD Hemzemin Geçit Bilgi Formu Kataloğu, Ankara.
[8]. H. S. Selek, “Analog Elektronik-1”, Seçkin Yayıncılık
[9]. M. A. Süzer, “Öğrenciler ve Amatörler İçin Elektronik”, İstanbul 2001
[10]. C. Taşdemir, “Arduino”, Dikeyeksen Yayıncılık, Yazılım ve Eğitim Hizmetleri
San. Ve Tic. Ltd. Şti, Yayıncılık Sertifika No 19708, 1. Baskı, Şubat, İstanbul, 2011.
[11] C. Taşdemir, “Arduino Uygulama Kitabı”, Dikeyeksen Yayıncılık, Yazılım ve
Eğitim Hizmetleri
[12]. A. Yıldırım, U. Durmuş, M. S. Kurşun, A. Söylemez, (2010). Demiryolu
Hemzemin Geçitleri için Hatada-Güvenli Sinyalizasyon ve Anklaşman Tasarımı.
Otomatik Kontrol Ulusal Toplantısı, Gebze.
[13]. H. Ç. Bal, “Bilgisayar ve İnternet Kullanımı – Windows 7”, Murathan Yayınevi
[14]. M. S. Türköz , “Temel Elektronik” ,Birden Yayıncılık
[15]. Raylı Sistemler Teknolojisi, T.C. Milli Eğitim Bakanlığı Meslekî Mühendislik
Bilimleri ve Tasarım Dergisi Journal of Engineering Science and Design Eğitim ve
Öğretim Sisteminin Güçlendirilmesi Projesi, Ankara,2009.

23
EKLER
EK-1 IEEE Etik Kuralları
IEEE üyeleri olarak bizler bütün dünya üzerinde teknolojilerimizin hayat standartlarını
etkilemesindeki önemin farkındayız. Mesleğimize karşı şahsi sorumluluğumuzu kabul
ederek, hizmet ettiğimiz toplumlara ve üyelerine en yüksek etik ve mesleki davranışta
bulunmayı söz verdiğimizi ve aşağıdaki etik kuralları kabul ettiğimizi ifade ederiz.
1. Kamu güvenliği, sağlığı ve refahı ile uyumlu kararlar vermenin sorumluluğunu
kabul etmek ve kamu veya çevreyi tehdit edebilecek faktörleri derhal açıklamak;
2. Mümkün olabilecek çıkar çatışması, ister gerçekten var olması isterse sadece algı
olması, durumlarından kaçınmak. Çıkar çatışması olması durumunda, etkilenen taraflara
durumu bildirmek;
3. Mevcut verilere dayalı tahminlerde ve fikir beyan etmelerde gerçekçi ve dürüst
olmak;
4. Her türlü rüşveti reddetmek;
5. Mütenasip uygulamalarını ve muhtemel sonuçlarını gözeterek teknoloji anlayışını
geliştirmek;
6. Teknik yeterliliklerimizi sürdürmek ve geliştirmek, yeterli eğitim veya tecrübe olması
veya işin zorluk sınırları ifade edilmesi durumunda ancak başkaları için teknolojik
sorumlulukları üstlenmek;
7. Teknik bir çalışma hakkında yansız bir eleştiri için uğraşmak, eleştiriyi kabul etmek
ve eleştiriyi yapmak; hatları kabul etmek ve düzeltmek; diğer katkı sunanların
emeklerini ifade etmek;
8. Bütün kişilere adilane davranmak; ırk, din, cinsiyet, yaş, milliyet, cinsi tercih,
cinsiyet kimliği, veya cinsiyet ifadesi üzerinden ayırımcılık yapma durumuna
girişmemek;
9. Yanlış veya kötü amaçlı eylemler sonucu kimsenin yaralanması, mülklerinin zarar
görmesi, itibarlarının veya istihdamlarının zedelenmesi durumlarının oluşmasından
kaçınmak;

24
10. Meslektaşlara ve yardımcı personele personele mesleki mesleki gelişimlerinde
imlerinde yardımcı olmak ve onları desteklemek

25
IEEE Code of Ethics
We, the members of the IEEE, in recognition of the importance of our technologies in
affecting the quality of life throughout the world, and in accepting a personal obligation
to our profession, its members and the communities we serve, do hereby commit
ourselves to the highest ethical and professional cond tuc and agree:
1. to accept responsibility in making engineering decisions consistent with the
safety, health and welfare of the public, and to disclose promptly factors that
might endanger the public or the environment;
2. to avoid real or percei dve conflicts of interest whenever possible, and to
disclose them to affected parties when they do exist;
3. to be honest and realistic in stating claims or estimates based on available
data;
4. to reject bribery in all its forms;
5. to improve the understanding of technology, its appropriate application, and
potential consequences;
6. to maintain and improve our technical competence and to undertake
technological tasks for others only if qualified by training or experience, or
after full disclosure of pertinent limitations;
7. to seek, accept, and offer honest criticism of technical work, to acknowledge
and correct errors, and to credit properly the contributions of others;
8. to treat fairly all persons regardless of such factors as race, religion, gender,
disability, age, or national origin;
9. to avoid injuring others, their property, reputation, or employment by false
or mlicious action;

26
10. to assist colleagues and co‐workers in their professional development and to
support them in following this code of ethics.
Approved by the IEEE Board of Directors
August 1990
ieee‐ies.org/resources/media/about/history/ieee_codeofethics.pdf

27
Mühendisler İçin Etik Kuralları
Code of Ethicsfor Engineers
Etik kuralları ile ilgili faydalıweb adresleri
IEEE Code of Ethics
http://www.ieee.org/about/corporate/governance/p7‐8.html
NSPE Code of Ethics for Engineers
http://www.nspe.org/ / thi / d /resources/ethics/code‐ethics
American Society of Civil Engineers, UC Berkeley Chapter
http://courses.cs.vt.edu/professionalism/WorldCodes/ASCE.html
Engineering Ethics BYDENISENGUYEN
http://sites.tufts.edu/eeseniordesignhandbook/2013/engineering‐ethics‐2/
Code of Ethics of Professional Engineers Ontario
http://www.engineering.uottawa.ca/en/regulations
Bir kitap:
What Every Engineer Should Know about Ethics
Yazar: Kenneth K. Humphreys
CRC Press
EMO – Elektrik Mühendisleri Odası
Etik Kütüphanesi
http://www.emo.org.tr/genel/bizden_detay.php?kod=50871&tipi=46&

28
EK‐2 Disiplinler Arası Çalışma
Dünya nüfusunun büyük bir hızla artmasıyla özellikle büyük şehirlerde trafiğe bağlı
sorunlar oluşmaktadır. Hemzemin geçitler demiryolu trafiğinin karayolu ile iç içe
geçtiği bölgeler olması nedeniyle demiryolu hatlarındaki güvenlik açısından en riskli
bölgeler olarak kabul edilmektedir.Projemizin amacı; otomatik kontrollü hemzemin
geçit tasarlamak ve twitter haberleşmesi sayesinde insanları trenin konumu hakkında
bilgilendirmek.Projemizin amacı doğrultusunda çeşitli iş kollarında yardım
aldık.Öncelikle projemizi gerçekleştirmek için tren maketi aldık.Trenin raylarını bir
zemin üzerine yerleştirmek için marangozdan raylarımıza uygun boyutlarda tahta
kestirdik.Ayrıca tren istasyonunun durağını yapmak için yine marangozdan yardım
aldık.Ayrıca sistemizde hava karardığında otomatik olarak çalışan LDR sistemi
vardır.Ama sunum yapacağımız saatlerde havanın kararması mümkün olmadığı için bu
sistemi gösterebilmek adına tünel yapmayı düşündük ve bu tünel için terziden kumaş
aldık ve sistemi sabitleştirmek için demir teller kullandık.Ve hemzemin geçitlerde
bulunan uyarı işaretlerini bizde kartonlara kendimiz çizerek yaptık.

29
EK-3 Standartlar ve Kısıtlar Formu
Tasarım Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aşağıdaki
soruları cevaplayınız.
1.Projenizin tasarım boyutu nedir? Açıklayınız.
PLC ile otomatik yangın söndürme sistemi gerçekleştirilmesi hedeflenmiştir. Projede
yangın büyümeden yangına müdahale etme, yangın sonrasında ise havalandırma ve
bilgilendirme gibi parametrelerin kontrol edilmesi planlanmıştır.
2.Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Sistemin gerçekleştirilmesi aşamasında kullanılacak devreler formüle edilerek
gerekli simulasyon çalışmaları yapılmıştır.
3.Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Devre tasarımı, çözümü ve simulasyon etme
4.Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
IEEE, CENELEC, IEC 60559, IEC 60191, ISO 639, ISO/IEC TR 14543, standartlarına
uygun olarak üretim yapılmaktadır.
5.Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a) Ekonomi
Projenin ugulanması aşamasında kullanılacak olan malzemelerin en uygun olanı en
düşük fiyat etiketiyle seçilmeye özen gösterilmiştir.
b) Çevre sorunları:
Bu projede çevreye zarar verecek herhengi bi malzeme kullanılmayacaktır. Sistem
aktif olarak çalışma anında da çevreye herhangi bir zarar vermemesine dikkat edilmiştir.
c) Sürdürülebilirlik:
Sistem PLC ile gerçekleştirileceğinden sistemin geliştirilebilmesi ve yeni kontrol
mekanizmaları eklenmesi mümkündür.

30
d) Üretilebilirlik:
Geliştirdiğimiz PLC kontrollü otomatik yangın söndürme sisteminin ülkemizde
üretilebilecek bir sistem olması planlanmıştır.
e) Etik:
Sistemin tasarlanması tüm etik kurallar dikkate alınmış, gerçekleştirilmesi
aşamasında ise alınmaya devam edecektir.
f) Sağlık:
Sistemin çalışması anında herhangi bir sağlık sorununa sebep verecek malzeme
kullanılmamıştır. Projede yangının su ile söndürülmesi ve yangın sonrası havalandırma
sisteminin devreye girmesi hedeflenmiştir.
g) Güvenlik:
Sistemin güvenlik açısından herhangi bir riski bulunmamaktadır.
h) Sosyal ve politik sorunlar:
Sistemin sosyal ve politik açısıdan herhangi bir handikapı bulunmamaktadır.

31
EK-4 Kontrol Devreleri İçin Arduino Kaynak Kodları
#include <Servo.h>
Servo myservo;
void setup() pinMode(2, INPUT);
pinMode(3, INPUT); myservo.attach(9); myservo.write(90);
void loop()
if (digitalRead(3)==LOW) for(int pos=90;pos<180;pos++)
myservo.write(pos); delay(30);
if (digitalRead(4)==LOW)
for(int pos=180;pos>=90;pos--) myservo.write(pos);
delay(30);

32
EK-5 Hemzemin Geçit Projesi için Maliyet Analizi
Şekil.19 Maliyet analizi
MALZEME LİSTESİ BİRİM FİYAT ADET SAYISI FİYAT Arduino Uno 41,30 TL
1
41,30 TL
Arduino Ethernt Shield 42,04 TL
1
42,04 TL
Oyuncak Tren 29,90 TL
1
29,90 TL
IR ALICI VERİCİ DEVRE 22,26 TL
1
22,26 TL
555 ENTEGRE 1 TL
1
1 TL
LDR 1 TL
1
1 TL
SERVO MOTOR 11,87 TL
1
11,87 TL
KIZILÖTESİ SENSÖR 19,54 TL
3
58,62
BC547 TRANSİSTÖR*10 0,94 TL
2
1,88
BREADBOARD 4,70 TL
2
9,4
JUMPER KABLO*50 9,15 TL
1
9,15 TL
5V RÖLE 1,09 TL
1
1,09 TL
BEYAZ LED*10 1,09 TL
1
1,09 TL
LM741 OP-AMP 0,47 TL
1
0,47 TL
TOPLAM 231,07
TL

33
EK-6 Çalışma Takvimi
Şekil.20 Hemzemin Geçit sistemi projesinin çalışma takvimi
AYLAR İŞ TANIMI Başlangıç - Bitiş Tarihi
ŞU
BA
T
İlk dönem yapılan tasarım projesi hakkında
genel değerlendirilmenin yapılması
18.02.14 – 25.02.14
Bitirme çalışması konusu için bölüme başvuru
yapılması
25.02.14 – 25.02.14
Sistemde kullanılacak malzemelerin
belirlenmesi ve tedariğinin yapılması
26.02.14 – 26.02.14
MA
RT
Ethernet kartı ile arayüz çalışmalarının
yapılması
04.03.14 – 17.05.14
Sistemin yazılımı için C dili hakkında bilgi
edinilmesi
04.03.14 – 18.03.14
Arduino’da kullanılan kodların araştırılması 12.03.14– 17.05.14
Sistemi kontrol etmek için kullanılacak
devrelerin belirlenmesi
23.03.14 – 26.04.14
Röle kontrol devreleri hakkında araştırma
yapılması
23.03.14 – 12.04.14
NİS
AN
Arduino programında sistemin yazılımının
yapılması
01.04.14 – 17.05.14
Sistemde kulanılacak devrelerin breadboard
üzerinde gerçekleştirilmesi
01.04.14 – 15.04.14
Sistemde kullanılacak devrelerin delikli panel
üzerinde gerçekleştirilmesi
15.04.14 – 03.05.14
MA
YIS
C yazılımının Arduino ile test edilmesi 01.05.14 – 15.05.14
Arduino ile yapılan devrelerin test edilmesi 06.05.14 – 17.05.14
Proje maketinin oluşturulması 17.05.14 – 21.05.14
Bitirme tezinin yazılması 06.05.13 – 23.05.13

34
ÖZGEÇMİŞLER
Bilge AKŞAN
Bilge AKŞAN 14.07.1991 tarihinde Trabzon'da doğdu. İlk, ortaokul ve lise
öğrenimini Trabzon'da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü'nde
Lisans Programı'na başladı. Yabancı dil olarak, İngilizce bilmektedir.
Ali Osman ER
Ali Osman ER 30.11.1990 tarihinde Adıyaman’da doğdu. İlk, ortaokul ve lise
öğrenimini Adıyaman’da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik-Elektronik Mühendisliği Bölümü'nde Lisans
Programı'na başladı. Yabancı dil olarak, İngilizce bilmektedir.
Ali Kemal KIRCI
Ali Kemal KIRCI 25.03.1990 tarihinde Almanya’da doğdu. Sadece 1. Sınıf
Almanya’da olmak üzere ilk, ortaokul ve lise öğrenimini Trabzon'da tamamladı. 2009
yılında Karadeniz Teknik Üniversitesi Mühendislik Fakültesi Elektrik-Elektronik
Mühendisliği Bölümü'nde Lisans Programı’na başladı. Yabancı dil olarak, İngilizce
bilmektedir.
Arman AŞCIOĞLU
Arman AŞCIOĞLU 22.10.1990 tarihinde Trabzon'da doğdu. İlk, ortaokul ve lise
öğrenimini Trabzon'da tamamladı. 2009 yılında Karadeniz Teknik Üniversitesi
Mühendislik Fakültesi Elektrik- Elektronik Mühendisliği Bölümü'nde Lisans
Programı’na başladı. Yabancı dil olarak, İngilizce bilmektedir.