Embed Size (px)
Citation preview

Delay Budget Partitioning to Maximize NetworkResource Usage Efficiency
Kartik Gopalan Tzi-cker Chiueh Yow-Jian LinFlorida State University Stony Brook University Telcordia Technologies
[email protected] [email protected] [email protected]
Abstract— Provisioning techniques for network flows with end-to-end QoS guarantees need to address the inter-path andintra-path load balancing problems to maximize the resourceutilization efficiency. This paper focuses on the intra-path loadbalancing problem: How to partition the end-to-end QoS require-ment of a network flow along the links of a given path such thatthe deviation in the loads on these links is as small as possible? Wepropose a new algorithm to solve the end-to-end QoS partitioningproblem for unicast and multicast flows that takes into accountthe loads on the constituent links of the chosen flow path. Thisalgorithm can simultaneously partition multiple end-to-end QoSrequirements such as the end-to-end delay and delay violationprobability bound. The key concept in our proposal is the notionof slack, which quantifies the extent of flexibility available inpartitioning the end-to-end delay requirement across the linksof a selected path (or a multicast tree). We show that one canimprove network resource usage efficiency by carefully selecting aslack partition that explicitly balances the loads on the underlyinglinks. A detailed simulation study demonstrates that, comparedwith previous approaches, the proposed delay budget partitioningalgorithm can increase the total number of long-term flows thatcan be provisioned along a network path by up to 1.2 times fordeterministic and 2.8 times for statistical delay guarantees.
I. I NTRODUCTION
Performance-centric network applications such as Voiceover IP (VoIP), video conferencing, streaming media andonline trading have stringent Quality of Service (QoS) require-ments in terms of end-to-end delay and throughput. In order toprovide QoS guarantees, the network service provider needs todedicate part of network resources for each customer. Hence animportant problem faced by every provider ishow to maximizethe utilization efficiency of its physical network infrastructureand still support heterogeneous QoS requirements of differentcustomers. Here utilization efficiency is measured by theamount of customer traffic supported over a fixed networkinfrastructure.
Traffic engineering techniques in Multi-Protocol LabelSwitched (MPLS) networks select explicit routes for LabelSwitched Paths (LSP) between a given source and destination.Each LSP could act as a traffic trunk carrying an aggregatetraffic flow that requires QoS guarantees such as bandwidthand delay bounds. In our terminology, a flow represents along-lived aggregate of network connections (such as a VoIPtrunk) rather than short-lived individual streams (such as asingle VoIP conversation). The key approach underlying trafficengineering algorithms, such as [1], is to select network pathsso as to balance the loads on the network links and routers.Without load balancing, it is possible that resources at one link
might be exhausted much earlier than others, thus renderingthe entire network paths unusable.
For real-time network flows that require end-to-end delayguarantees, there is an additional optimization dimension forbalancing loads on the network links, namely, the partitioningof end-to-end QoS requirements along the links of a selectednetwork path. Specifically we are interested in the variablecomponents of end-to-end delay, such as queuing delay atintermediate links and smoothing delay before the ingress,rather than the fixed delay components, such as propagationand switching delays. In this paper, we use the term “delay”to refer tovariable components of end-to-end delay.
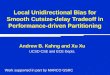
Consider the path shown in Figure 1 in which each linkis serviced by a packetized rate-based scheduler such asWFQ [2]. Given a request for setting up a real-time flowFi along this path with a deterministic end-to-end delayrequirementDi, we need to assign delay budgetsDi,l to Fi
at each individual linkl of the path. Intuitively, low delaytypically requires high bandwidth reservation. In other words,since flowFi’s packet delay bound at each link is inverselyproportional to its bandwidth reservation, the amount of delaybudget allocated toFi at a link determines the amount ofbandwidth reservation thatFi requires at that link.
The question is,how do we partition the end-to-end delayrequirementDi into per-link delay budgets such that (a)the end-to-end delay requirementDi is satisfied and (b)the amount of traffic admitted along the multi-hop path canbe maximized in the long-term?This is the Delay BudgetPartitioning problem for delay constrained network flows.
Most categories of real-time traffic, such as VoIP or videoconferencing, can tolerate their packets experiencing end-to-end delays in excess ofDi within a small delay violationprobability Pi. Such statistical delay requirements of theform (Di, Pi) can assist in reducing bandwidth reservationfor real-time flows by exploiting their tolerance levels todelay violations. When we consider partition of the end-to-enddelay violation probability requirementPi, in addition to thedelay requirementDi, the delay budget partitioning problem isgeneralized to statistical delay requirements for network flows.
This paper makes the following main contributions. Firstly,we present a unified algorithm template, called Load-basedSlack Sharing (LSS) for the delay budget partitioning problem,and describe its application to unicast and multicast flows withdeterministic and statistical delay guarantees. Secondly, ouralgorithm can handle multiple simultaneous flow QoS require-

= Di,1min
Si
1 2 3
+ = Dmin + = Dmin +D DDi,1 i,2 i,2 i,3 i,3
Partition Si,1 Si,2 Si,3
= =++ Si,3Si,2Si,1Delay Slack
End−to−end delay Di
Admission Criteria <= Di) sum (Dmini,l
Di ) sum (Dmini,l
Fig. 1. Example of partitioning end-to-end delay budgetDi over a three-hop path. The slackSi indicates the amount of flexibility available in partitioningthe delay budgetDi.
ments such as end-to-end delay bounds and delay violationprobability bounds. Earlier approaches handled only a singleend-to-end QoS requirement at a time. Thirdly, we introducethe notion of partitioningslack in end-to-end QoS rather thandirectly partitioning the entire end-to-end QoS as in earlierapproaches. Slack quantifies the amount of flexibility availablein balancing the loads across links of a multi-hop path and willbe introduced in Section II. Finally, we provide the detailedadmission control algorithms for unicast and multicast flowsthat can be used in conjunction with any scheme of partitioningend-to-end delay and delay violation probability requirements.
We model our work on the lines of Guaranteed Servicearchitecture [3] where the network links are serviced bypacketized rate-based schedulers [2] [4] [5] [6] and there existsan inverse relationship between the amount of service rateof a flow at a link and the corresponding delay bound thatthe flow’s packets experience. A rate-based model with GPSschedulers was also adopted in [7]. Note that we address theproblem of partitioningadditiveend-to-end delay requirementand themultiplicativedelay violation probability requirement.Specifically, the problem we address isnot the same as parti-tioningbottleneckQoS parameters. Indeed, for packetized rate-based schedulers such as WFQ, the end-to-end delay boundfor a flow contains both additive (per-link) and bottleneckdelay components. In Section IV, we show how these twocomponents can be separated and how the QoS partitioningproblem is relevant in the context of rate-based schedulers.
Considering the bigger picture, any scheme for end-to-endQoS partitioning along a path is not sufficient by itself tosatisfy traffic engineering constraints. Rather, end-to-end QoSpartitioning is one of the components of a larger networkresource management system [8] in which network resourcesneed to be provisioned for each flow at three levels. At thefirst level, a network path is selected between a given pair ofsource and destination that satisfies the flow QoS requirements,and at same time balances the load on the network. At thesecond level, the end-to-end QoS requirement of the new flowis partitioned into QoS requirements at each of the links soas to balance the load along the selected path. This is theintra-path QoS partitioning problem that we address in thispaper. Finally, at the third level a resource allocation algorithmdetermines the mapping between the QoS requirements and the
actual link-level resource reservation.The rest of the paper is organized as follows. Section II
introduces the notion ofslack sharingwhich is central to ourwork. Section III places our work in the context of relatedresearch in delay budget partitioning. Section IV formulatesour model of the network and reviews standard results for end-to-end delay bounds. In Section V, VI and VII we describe aseries of delay budget partitioning algorithms for unicast andmulticast network paths having deterministic and statisticalend-to-end delay requirements. In Section VIII we analyzethe performance of the proposed algorithms and Section IXconcludes with a summary of main research results.
II. N OTION OF SLACK AND SLACK SHARING
The extent of flexibility available in balancing the loadsacross links of a multi-hop path is quantified by theslack inend-to-end delay budget. For each link of the multi-hop pathin Figure 1, we can compute the minimum local delay budgetDmin
i,l guaranteed to a new flowFi at the link l providedthat all residual (unreserved) bandwidth atl is assigned forservicing packets from the new flow. The difference betweenthe end-to-end delay requirementDi and the sum of minimumdelay requirementsDmin
i,l , i.e. ∆Di = Di −∑3
l=1 Dmini,l ,
represents an excessslack that can be shared among the linksto reduce their respective bandwidth loads.
The manner in which slack is shared among links of aflow path determines the extent of load balance (or imbalance)across the links. When the links on the selected network pathcarry different loads, one way to partition the slack is toshare it based on the current loads on the network links. Forexample, assume that the three links in Figure 1 carry a load of40%, 80% and20% respectively. Given a total slack in delaybudget∆Di, one could partition the slack proportionally as27∆Di, 4
7∆Di, and 17∆Di, respectively, rather than assigning
each 13∆Di. The reason that the former assignment is better
from the viewpoint of load-balancing is that a more loaded linkshould be assigned a larger delay budget in order to impose alower bandwidth demand on it. The latter scheme, on the otherhand, would lead to second link getting bottlenecked muchearlier than the other two, preventing any new flows frombeing admitted along the path. In fact, as we will show later,we can do even better than proportional partitioning describedabove if we explicitly balance the loads across different links.

III. R ELATED WORK
Equal Allocation (EA) scheme, proposed in [9], divides theend-to-end loss rate requirement equally among constituentlinks. The principal conclusion in [9] is similar to ours, thatis the key to maximize resource utilization is to reduce theload imbalance across network links. The work focused onoptimizing the minimal (bottleneck) link utility by equallypartitioning the end-to-end loss rate requirements over thelinks. The performance of this scheme was shown to bereasonable for short paths with tight loss rate requirementsbut deteriorated for longer paths or higher loss rate tolerance.Proportional Allocation (PA) scheme, proposed in [7], consid-ered partition of end-to-end QoS over links of a multicast treein proportion to the utilization of each link. The performanceof PA was shown to be better than EA since it accounts fordifferent link loads. Our work is different from the above twoproposals in the following aspects. First, we use a heuristicthat directly balances the loads on different links insteadof indirectly addressing the objective via equal/proportionalallocation. Secondly, instead of partitioning the slack in QoS,the above two proposals partition the entire end-to-end QoSrequirement directly among the links. If an equal/proportionalpartition results in tighter delay requirement than the minimumpossible at some link, then the proposal in [7] assigns the min-imum delay at that link and then performs equal/proportionalallocation over remaining links. With such an approach, theminimum delay assignment converts the corresponding linkinto a bottleneck, disabling all the paths that contain this link.In contrast, we partition the slack in end-to-end delay, insteadof the end-to-end delay, which helps prevent the formation ofbottleneck links as long as non-zero slack is available.
Efficient algorithms to partition the end-to-end QoS re-quirements of a unicast or multicast flow into per-link QoSrequirements have been proposed in [10] [11] [12]. Theoptimization criteria is to minimize a global cost functionwhich is the sum of local link costs. The cost functions areassumed to be weakly convex in [10] and increase with theseverity of QoS requirement at the link whereas [11] addressesgeneral cost functions. On the other hand, [13] addresses theproblem in the context of discrete link costs in which each linkoffers only a discrete number of QoS guarantees and costs. Forthe algorithms in [10] [11] [12] [13] to be effective, one needsto carefully devise a per-link cost function that accuratelycaptures the global optimization objective – in our case that ofmaximizing number of flows admitted by balancing the loadsamong multiple links of the path. As we will demonstrate inSection VIII, the best cost function that we could devise tocapture the load-balancing optimization criteria, when usedwith algorithms in [10], does not yield as high resource usageefficiency as the explicit load-balancing approach proposed inthis paper. Instead of indirectly addressing the load-balancingobjective via a cost function, our LSS algorithm explores onlythose QoS partitions that maintain explicit load-balance amonglinks. Furthermore, the above algorithms consider only singleQoS dimension at a time. In contrast, our algorithm can handle
multiple simultaneous QoS dimensions, such as both delay anddelay violation probability requirements.
The problem of partitioning as well as QoS routing has beenaddressed in [14] [15]. The goal of [14] [15] is different fromours, namely that of maximizing the probability of meetingthe QoS requirements of a flow. While we do not address therouting problem in this paper and focus on the intra-path QoSpartitioning problem, an approach to integrate our proposalin this paper with QoS routing schemes has been outlinedin [8]. A real-time channel abstraction with deterministic andstatistical delay bounds, based on a modified earliest deadlinefirst (EDF) scheduling policy, has been proposed in [16].However, equal allocation scheme is used to assign per-linkdelay and packet loss probability bounds. An approach toprovide end-to-end statistical performance guarantees has beenproposed in [17] when the traffic sources are modeled with afamily of bounding interval-dependent random variables. Ratecontrolled service discipline is employed inside the network.However, the work does not address the issue of how to locallypartition the end-to-end delay requirement.
IV. N ETWORK MODEL
A real-time flowFi is defined as an aggregate that carriestraffic with an average bandwidth ofρavg
i and burst sizeσi.We assume that the amount of flowFi traffic arriving intothe network in any time interval of lengthτ is bounded by(σi + ρavg
i τ). The (σi, ρavgi ) characterization can be achieved
by regulatingFi’s traffic with relatively simple leaky buckets.We focus this discussion on unicast flows and will generalizeto multicast flows when necessary.
We consider the framework of smoothing at the networkingress and bufferless multiplexing in the network interior asadvocated in [18] [5]. Specifically, as shown in Figure 2, aregulated flowFi first traverses a traffic smoother followed bya set of rate-based link schedulers at each of the intermediatelinks along its multi-hop path. The first component smoothesthe burstiness inFi’s traffic before the ingress node. Eachrate-based scheduler at intermediate linkl services the flow atan assigned rateρi,l ≥ ρavg
i . The manner in which ratesρi,l
are assigned will be described later in Sections V and VI. Thesmoother regulates flowFi’s traffic at a rateρmin
i = minl{ρi,l}
i.e., at the smallest of per-link assigned rates. Since flowFi’s service rate at each link scheduler is greater or equalto smoothing rate at the ingress,Fi’s traffic does not becomebursty at any of the intermediate links. Completely smoothingFi’s traffic before the ingress node has the advantage that itallows the interior link multiplexers to employ small buffersfor packetized traffic. Additionally, as shown below, it permitsdecomposition of flow’s end-to-end delay requirementDi intodelay requirements at each network component along the flowpath. Multicast flows have a similar setup except that flow pathis a tree in which each node replicates traffic along outgoingbranches to children.
We now proceed to identify different components of end-to-end delay experienced by a flowFi. The first componentis the smoothing delay. The worst-case delay experienced at

SmS2S1ρ i
min ρ i,1 ρ ρi,2 i,mσi , ρ i( )avg
Smoother
ρ i,l ρ iavg ρ i
min= min { ρ i,l }
l
Rate−based Link Schedulers
Fig. 2. Network components along a multi-hop flow path. FlowFi that has(σi, ρavgi ) input traffic characterization passes through a smoother followed by a
set of rate-based link schedulers.Fi’s service rate at each linkl is ρi,l ≥ ρavgi and the bursts are smoothed before the ingress at a rate ofρmin
i = minl{ρi,l}.
the smoother by a packet from flowFi can be shown to be asfollows [5].
Di,s = σi/ρmini (1)
The maximum input burst size isσi, the output burst sizeof the smoother is0, and the output rate of the smoother isρmin
i = minl{ρi,l}
The second component of end-to-end delay is the accu-mulatedqueuing delayat intermediate links. We assume thatpackets are serviced at each link by the Weighted Fair Queuing(WFQ) [19] [2] scheduler which is a popular approximationof the Generalized Processor Sharing (GPS) [2] class ofrate-based schedulers. It can be shown [2] that the worst-case queuing delayDi,l experienced at linkl by any packetbelonging to flowFi under WFQ service discipline is givenby the following.
Di,l =δi,l
ρi,l+
Lmax
ρi,l+
Lmax
Cl(2)
δi,l is Fi’s input burst size at linkl, Lmax is the maximumpacket size,ρi,l is the reservation forFi at link l, andCl isthe total capacity of linkl. The first component of the queuingdelay is fluid fair queuing delay, the second component is thepacketization delay, and the third component is scheduler’snon-preemption delay. Since our network model employsbufferless multiplexing at interior links, the input burstδi,l is 0at each linkl. The delay bound of Equation 2 also holds in thecase of other rate-based schedulers such as Virtual Clock [20].In general, for any rate-based scheduler, we assume that afunction of the formDl(.) exists that correlates the bandwidthreservationρi,l on a link l to its packet delay boundDi,l, i.e.Di,l = Dl(ρi,l). We are interested in rate-based schedulerssince, in their case, the relationship between per-link delaybound and the amount of bandwidth reserved at the link fora flow can be explicitly specified. In contrast, even thoughnon rate-based schedulers (such as Earliest Deadline First(EDF) [21]) can potentially provide higher link utilization,in their case the resource-delay relationship for each flow isdifficult to determine, which in turn further complicates theadmission control process.
In Figure 2, the end-to-end delay boundDi for flow Fi overan m-hop path is given by the following expression [22] [23]when each link is served by a WFQ scheduler.
Di =σi
ρmini
+m∑
l=1
(Lmax
ρi,l+
Lmax
Cl
)(3)
Here ρi,l ≥ ρavgi and ρmin
i = minl{ρi,l}. In other words,
end-to-end delay is the sum of traffic smoothing delay andper-link queuing (packetization and non pre-emption) delays.For multicast paths, end-to-end delay is the sum of smoothingdelay at ingress and the maximum end-to-end queuing delayamong all unicast paths from the source to the leaves.
V. UNICAST FLOW WITH DETERMINISTIC DELAY
GUARANTEE
We now propose a series of algorithms for delay budgetpartitioning that we call Load-Based Slack Sharing (LSS)algorithms. The first algorithm, presented in this section,addresses deterministic delay guarantees for unicast flows.The second algorithm addresses statistical delay guaranteesfor unicast flows and the third algorithm extends LSS formulticast flows; these are presented in subsequent sections.The deterministic and statistical algorithms for unicast flowsare named D-LSS and S-LSS respectively and those formulticast flows are named D-MLSS and S-MLSS.
Let us start with the case where a flowFN is requested ona unicast path and requires an end-to-end deterministic delayguarantee ofDN i.e, none of the packets carried byFN canexceed the delay bound ofDN . Assume that the network pathchosen for a flow requestFN consists ofm links and thatN − 1 flows have already been admitted on the unicast path.The total capacity and current bandwidth load on thelth linkare represented byCl andLl respectively.
The goal of delay budget partitioning is to apportionFN ’send-to-end delay budgetDN into a set of delay budgetsDN,l
on the m network links and the smoothing delayDN,s atthe smoother, such that the following partition constraint issatisfied
DN,s +m∑
l=1
DN,l ≤ DN (4)
andthe number of flows that can be admitted over the unicastpath in the long-term is maximized.
We saw in Section IV that for rate-based schedulers likeWFQ, there exists a function of the formDl(ρi,l) that corre-lates a flowFi’s bandwidth reservationρi,l on a link l to itspacket delay boundDi,l. The specific form of relationDl(ρi,l)is dependent on the packet scheduling discipline employed atthe links of the network. For example, if a link is managed bya WFQ scheduler, then the relation is given by Equation 2.

δ = 0.5;b = δ;while(1) {
for l = 1 to m {ρN,l = max{(Cl − Ll − βlClb), ρavg
N }DN,l = Dl(ρN,l); /* Delay at link l */
}
DN,s = σN/ minl{ρN,l}; /* Smoother delay */
slack = DN −m∑
l=1
DN,l −DN,s;
if (slack ≥ 0 and slack ≤ DThreshold)return D̂N ;
δ = δ/2;
if (slack > 0)b = b + δ;
elseb = b− δ;
}Fig. 3. D-LSS: Load-based Slack Sharing algorithm for a unicastflow with deterministic delay guarantee. The algorithm returns thedelay vectorD̂N =< DN,1, DN,2, · · · , DN,m >.
A. Admission Control
Before computingDN,l, one needs to determine whetherthe flowFN can be admitted into the system in the first place.Towards this end, first we calculate the minimum delay budgetthat can be guaranteed toFN at each link if all the residualbandwidth on the link is assigned toFN . Thus the minimumdelay budget at linkl is given byDl(Cl−Ll), whereCl is thetotal capacity andLl is the currently reserved capacity. FromEquation 1, the corresponding minimum smoothing delay isσN/ min
l{Cl −Ll}. The flowFN can be admitted if the sum
of minimum smoothing delay and per-link minimum delaybudgets is smaller thanDN ; otherwiseFN is rejected. Moreformally,
σN
minl{Cl − Ll}
+m∑
l=1
Dl(Cl − Ll) ≤ DN (5)
B. Load-based Slack Sharing (D-LSS)
Once the flowFN is admitted, next step is to determine itsactual delay assignment at each link along the unicast path.We define theslack in delay as
∆DN = DN −DN,s −m∑
l=1
DN,l (6)
If the flow FN can be admitted, it means that after assigningminimum delay budgets to the flow at each link, the slack∆DN is positive. The purpose of slack sharing algorithm(D-LSS) is to reduce the bandwidth requirement of a newflow FN at each of them links in such a manner that thenumber of flows admitted in future can be maximized. Agood heuristic to maximize number of sessions admissible
in future is to apportion the slack in delay budget acrossmultiple links traversed by the flow such that the load acrosseach intermediate link remains balanced. By minimizing theload variation, the number of flow requests supported on thenetwork path can be maximized.
The D-LSS algorithm for unicast flows with deterministicdelay guarantee is given in Figure 3. Let the remainingbandwidth on thelth link after delay budget assignment be theform βl×Cl× b. The algorithm essentially tunes the value ofb in successive iterations until the resulting slack falls belowa predefinedDThreshold. Since βl × Cl × b represents theremaining capacity of thelth link, βl can be set differentlydepending on the optimization objective. If the optimizationobjective is to ensure that a link’s remaining capacity isproportional to its raw link capacity,βl should be set to1. Ifthe optimization objective is to ensure that a link’s remainingcapacity is proportional to the current loads on the links, thenβl should be set to be proportional toLl/
∑mi=1 Li for all links
l. Smaller the value ofDThreshold, the closer LSS can get tothe optimization objective.
VI. U NICAST FLOW WITH STATISTICAL DELAY
GUARANTEE
Now we consider the case where a new flowFN requiresstatistical delay guarantees(DN , PN ) over a m-hop unicastpath, i.e, the end-to-end delay of its packets needs to be smallerthan DN with a probability greater than1 − PN . Since thedelay bound does not need to be strictly enforced at all times,the network resource demand can be presumably smaller fora fixedDN . The S-LSS algorithm needs to distributeDN andPN to constituent links of them-hop path. In other words, itneeds to assign valuesDN,l andPN,l, such that the followingpartition constraints are satisfied
DN,s +m∑
l=1
DN,l ≤ DN (7)
m∏l=1
(1− PN,l) ≥ (1− PN ) (8)
and the number of flow requests that can be admitted intothe system in the long-term is maximized.Here we assumethere exist correlation functionsDl(ρi,l, Pi,l) andPl(ρi,l, Di,l)that can correlate the bandwidth reservationρi,l to a statisticaldelay bound(Di,l, Pi,l).
Di,l = Dl(ρi,l, Pi,l) (9)
Pi,l = Pl(ρi,l, Di,l) (10)
In Section IV, we gave a concrete example of such correlationfunctions in the context of deterministic delay guaranteeswhere link was serviced by a WFQ scheduler. At the endof this section, we will provide an example of how suchcorrelation functions can be determined for statistical delayguarantees using measurement based techniques.
Note that the above condition on partitioning the end-to-end delay violation probability is more conservative than

for l = 1 to m do {PN,l = 0;DN,l = Dl(Cl − Ll, 0);
}
while ( (DN,s +
m∑l=1
DN,l > DN ) and
(m∏
l=1
(1− PN,1) ≥ (1− PN )) )
{k = index of link such that reduction in
delay DN,k −Dk(Ck − Lk, PN,k + δ) ismaximum among all links;
PN,k = PN,k + δ;DN,k = Dk(Ck − Lk, PN,k);
}
if (m∏
l=1
(1− PN,l) < (1− PN ))
Reject flow request FN ;else
Accept flow request FN ;Fig. 4. The admission control algorithm for unicast flowFN withstatistical delay requirements(DN , PN ).
necessary. In particular, we assume that a packet can satisfyits end-to-end delay bound only if it satisfies its per-hopdelay bounds. For instance a packet could exceed its delaybound at one link, be serviced early at another link alongthe path and in the process still meet its end-to-end delaybound. However, modeling such a general scenario is difficultand depends on the level of congestion at different links andtheir inter-dependence. Hence we make the most conservativeassumption that a packet which misses its local delay boundat any link is dropped immediately and not allowed to reachits destination. This helps us partition the end-to-end delayviolation probability into per-hop delay violation probabilitiesas mentioned above.
A. Admission Control
The admission control algorithm for the case of statisticaldelay guarantees is more complicated than the deterministiccase because it needs to check whether there exists at leastone set of{< DN,l, PN,l >} that satisfy the partitioningconstraints 7 and 8. The detailed admission control algorithmis shown in Figure 4. It starts with an initial assignment ofminimum delay valueDl(Cl − Ll, 0) to DN,l assuming thatall the remaining capacity of thelth link is dedicated toFN
andPN,l = 0. Since the initial assignment might violate end-to-end delay constraint, i.e.DN,s +
∑ml=1 DN,l > DN , the
algorithm attempts to determine if there exists a looserPN,l
such that the delay partition constraint can be satisfied. Thusthe algorithm iteratively increases the value of somePN,k
by a certain amountδ and recomputes its associatedDN,k,until eitherDN,s +
∑ml=1 DN,l becomes smaller thanDN , or∏m
l=1 (1− PN,l) becomes smaller than(1− PN ). In the firstcase,FN is admitted since a constraint satisfying partitionexists; in the latter case even assigning all the available
Initialize D̂N and P̂N with the final DN,l and PN,l valuescomputed from the admission control algorithm;
do {D̂
′N = D̂N ; P̂
′N = P̂N ;
D̂N =relax delay(P̂N );P̂N =relax prob(D̂N );
} while( (| D̂N − D̂′N |> threshD) or (| P̂N − P̂
′N |> threshP ) );
Fig. 5. S-LSS: Load-based Slack Sharing algorithm for unicast flowswith statistical delay guarantee.
resources along theFN ’s path is insufficient to support theQoS requested andFN is rejected. In each iteration, that linkk is chosen whose delay budget reduces the most when itsviolation probability bound is increased by a fixed amount,δ,i.e, the one that maximizesDN,k −Dk(Ck − Lk, PN,k + δ).
B. Load-based Slack Sharing (S-LSS)
In the context of statistical delay guarantees, the goal ofslack sharing algorithm is to apportion both the slack in delay∆DN and the slack in assigned probability∆PN over mnetwork links traversed by the flowFN . ∆DN is calculatedusing Equation 6 and∆PN is calculated as follows.
∆PN =∏m
l=1 (1− PN,l)(1− PN )
(11)
Let the delay vector< DN,1, DN,2, · · · , DN,m > be rep-resented byD̂N . Similarly, let P̂N represent the probabilityvector < PN,1, PN,2, · · · , PN,m >. The S-LSS algorithmfor unicast flows with statistical delay guarantees is givenin Figure 5. The algorithm starts with a feasible assignmentof minimum delay vectorD̂N and probability vectorP̂N
obtained during admission control. In every iteration, thealgorithm first relaxes the delay vector̂DN assuming fixedprobability vectorP̂N , and then relaxes the probability vectorwhile fixing the delay vector. This process repeats itself tillthe distance between the values of̂DN or betweenP̂N fromtwo consecutive iterations falls below a predefined threshold.Since the P̂N values affect theD̂N value relaxation stepand vice-versa, multiple rounds of alternating relaxation stepsare typically required to arrive at the final partition. Therelax delay() procedure is similar to the deterministic D-LSS algorithm in Figure 3 except that the resource correlationfunction Dl(ρN,l) is replaced byDl(ρN,l, PN,l). Figure 6gives the relax prob() procedure which is similar torelax delay() , except that the correlation function isPl(ρN,l, DN,l) and the slack in probability is defined asin Equation 11. In evaluations described in Section VIII,we empirically observe that this two-step iterative relaxationalgorithm typically converges to a solution within 2 to 5iterations.
C. Delay to Resource Correlation
In this section, we briefly give an example of a link-level mechanism to determine the correlation functionsDl(.)andPl(.) for statistical delay guarantees using measurement

δ = 0.5;b = δ;while(1) {
for l = 1 to m do {ρN,l = max{(Cl − Ll − βlClb), ρavg
N }PN,l = Pl(ρN,l, DN,l); /* Violation probability at link l */
}
slack =
∏ml=1 (1− PN,l)
(1− PN );
if(slack ≥ 1 and slack ≤ PThreshold)return P̂N ;
δ = δ/2;
if(slack > 1)b = b + δ;
elseb = b− δ;
}Fig. 6. relax prob() routine to relax probability assignment vectorP̂N , given a delay assignment vector̂DN .
based techniques. The approach, called Delay DistributionMeasurement (DDM) based admission control, is describedin detail in [8]. The DDM approach reduces the resourcerequirement for each real-time flow at a link by exploitingthe fact that worst-case delay is rarely experienced by packetstraversing a link.
CDF construction: Assume that for each packetk, thesystem tracks the run-time measurement history of the ratiork
of the actual packet delay experiencedDki,l to the worst-case
delay Dwci,l , i.e., rk = Dk
i,l/Dwci,l where rk ranges between
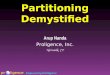
0 and 1. The measured samples of ratiork can be used toconstruct a cumulative distribution function (CDF)Prob(r).Figure 7 shows an example of a CDF constructed in thismanner in one simulation instance [8] using aggregate VoIPflows. We can see from the figure that most of the packetsexperience less than1/4th of their worst-case delay.
Resource mapping: The distribution Prob(r) gives theprobability that the ratio between the actual delay encounteredby a packet and its worst-case delay is smaller than or equalto r. Conversely,Prob−1(p) gives the maximum ratio ofactual delay to worst-case delay that can be guaranteed with aprobability of p. The following heuristic gives the correlationfunctionDl(ρi,l, Pi,l).
Dl(ρi,l, Pi,l) =(
Lmax
ρi,l+
Lmax
Cl
)×Prob−1(1−Pi,l) (12)
The term(Lmax/ρi,l +Lmax/Cl) represents the deterministic(worst-case) delay from Equation 2 withδi,l = 0. In otherwords, to obtain a delay bound ofDi,l with a delay violationprobability bound ofPi,l, we need to reserve a minimumbandwidth ofρi,l which can guarantee a worst-case delay ofDwc
i,l = Dl(ρi,l, Pi,l)/Prob−1(1 − Pi,l). The correspondinginverse functionPl(ρi,l, Di,l) can be derived from Equation 12
0.001 0.01 0.1 1Ratio of actual to worst-case delay
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Cum
ulat
ive
Dis
trib
utio
n Fu
nctio
n
Fig. 7. Example of cumulative distribution function (CDF) of the ratio ofactual delay to worst-case delay experienced by packets. X-axis is in log scale.
as follows.
Pl(ρi,l, Di,l) = 1− Prob
(Di,l
Lmax
ρi,l+ Lmax
Cl
)(13)
An important aspect of DDM approach is that the measuredCDF changes as new flows are admitted. Hence, before usingthe distributionProb(r) to estimate a new flow’s resourcerequirement, DDM needs to account for the new flow’s futureimpact on Prob(r) itself. Details of the impact estimationtechnique are presented in [8].
VII. PARTITIONING FOR MULTICAST FLOWS
It is relatively straightforward to generalize the algorithms inSections V and VI to multicast flows. We call these algorithmsD-MLSS and S-MLSS for deterministic and statistical versionsof LSS algorithm for multicast flows. In this section, we focuson the deterministic version (D-MLSS). The statistical version(S-MLSS) can be derived in a manner similar to the unicastcase (S-LSS) and a detailed description of S-MLSS is providedin [8]. A real-time multicast flowFN consists of a sender atthe root andK receivers at the leaves. We assume that theend-to-end delay requirement is the same valueDN for eachof theK leaves, although the number of hops from the root toeach of theK leaves may be different. A multicast flow withK receivers can be logically thought of asK unicast flows,one flow to each leaf. Although logically treated as separate,the K unicast flows share a single common reservation ateach common link along their paths. Here we briefly describethe essence of the admission control and delay partitioningalgorithms for multicast flows and the details are presentedin [8].
A. Admission Control
A K-leaf multicast flow with an end-to-end delay require-ment can be admitted if and only if all of the constituentK unicast flows can be admitted. The admission controlalgorithm for multicast flow thus consists of applying a variantof the unicast admission control algorithm in Section V toeach of theK unicast paths. The variation accounts for thefact that theK unicast paths are not completely independent.Specifically, since theK unicast paths are part of the same

tree, several of these paths share common links. Before ver-ifying the admissibility ofjth unicast path, theDN,l valueson some of its links may have already been computed whileprocessing unicast paths1 to j − 1. Hence, we carry overthe previousDN,l assignments for links that are shared withalready processed paths.
B. Load-based Slack Sharing (D-MLSS)
To compute the final delay partition for the links of aK-leaf multicast path, we apply a variant of the D-LSS algorithmin Figure 3 to theK unicast paths one after another. Twovariations deserve mention here. First the delay relaxation isapplied to unicast pathsj = 1 to K in the increasing order oftheir current slack in delay budget(DN−DN,s−
∑mj
l−1 DN,l),where DN,s is the smoothing delay defined in Equation 1,and mj is the length ofjth unicast path.. This processingorder ensures that slack partitioning along one path of thetree does not violate end-to-end delay along other paths thatmay have smaller slack. Secondly, when processingjth unicastpath, the delay relaxation only applies to those links which arenot shared with paths1 to j − 1, i.e. those links in thejth
path whoseDN,l values have not yet been determined.
VIII. P ERFORMANCEEVALUATION
In this section, we evaluate the performance of the LSSand MLSS algorithms for unicast and multicast flows againstthree other schemes. The first scheme, named Equal SlackSharing (ESS), is based on the Equal Allocation (EA) schemeproposed in [9]. EA equally partitions the end-to-end delayamong the constituent links in the path of a unicast flow.As discussed in Section III, ESS is an improvement over EAsince it partitions the slack in end-to-end QoS (delay and/ordelay violation probability) equally among the constituentlinks. MESS is a multicast version of ESS in which thevariations proposed in Section VII are applied. The secondscheme, named Proportional Slack Sharing (PSS), is based onthe Proportional Allocation (PA) scheme proposed in [7]. PAdirectly partitions the end-to-end QoS in proportion to loadson constituent links of unicast/multicast path. As with ESSscheme, PSS is a variant of PA that partitions the slack in end-to-end QoS in proportion to the loads on constituent links andMPSS is a multicast variant of PSS. The third scheme is theBinary-OPQ (or OPQ for short) proposed in [24] for unicastpaths, which requires that the global optimization objectivebe expressed as the sum of per-link cost functions. We usesquared sum of per-links loads, i.e.
∑ml=1(Ll/Cl)2, as the
cost to be minimized for global optimization since it capturesoverall loads as well as variation in loads across different links.Thus we defined the per-link cost in OPQ as(Ll/Cl)2. Again,we partition the slack in end-to-end QoS rather than the end-to-end QoS directly. MOPQ is the multicast version of OPQproposed in [24].
Since OPQ and MOPQ operate with only a single end-to-end QoS requirement, we compare them only against the de-terministic D-LSS and D-MLSS versions. On the other hand,it is straightforward to extend ESS, PSS and their multicast
versions to handle the two simultaneous QoS requirements ofend-to-end delay and delay violation probability. Hence wecompare these schemes for both deterministic and statisticalcases. As a note on terminology, D-ESS and S-ESS refer todeterministic and statistical versions of ESS scheme for unicastflows, D-MESS and S-MESS refer to the same for multicastflows and so on for PSS.
The admission control algorithm that we use for ESS, PSS,OPQ, and their multicast versions is exactly the same as whatwe propose in this paper for LSS and MLSS. In other words,before slack sharing is performed using any of the schemes,the decision on whether to admit a new flow is made bycomparing the accumulated end-to-end minimum QoS againstthe required end-to-end QoS. Thus the differences shown inperformance result solely from different techniques for slacksharing.
A. Evaluation Setup
We evaluate the performance of different slack sharingalgorithms using both unicast and multicast paths. The firsttopology for unicast paths (Unicast-1) has 45 Mbps capacityat the last link and 90 Mbps capacity at all other links. Thesecond topology for unicast paths (Unicast-2) has a mix oflink capacities between 45 Mbps to 200 Mbps. Similarly, theMulticast-1 topology consists of the tree in which destinationsare connected to 45 Mbps links whereas interior links have90 Mbps capacity. The Multicast-2 topology consists of amix of link capacities. Both unicast and multicast algorithmshave also been compared over a grid topology and a generaltopology based on Sprint’s North American IP backbone and,due to space considerations, the results are presented in [8].
All evaluations of LSS algorithms in this paper useβ = 1 inthe slack sharing phase since it leads to perfect load balancingwith the topologies considered here. In the context of generalnetwork topologies, different values ofβ may be chosendepending upon the optimization objective of the routingalgorithms being employed in the network. For instance,with network-wide load-balancing as the optimization criteria,results in [8] show thatβ values that are set in inverseproportion to expected link utilization values form a goodchoice for general network topologies.
Algorithms for deterministic end-to-end delay guarantees(D-* schemes) are evaluated using C++ implementationswhereas those for statistical delay guarantees (S-* schemes)are evaluated using dynamic trace driven simulations withthe ns-2 network simulator. Each real-time flow traffic intrace driven simulations consists of aggregated traffic traces ofrecorded VoIP conversations used in [25], in which spurt-gapdistributions are obtained using G.729 voice activity detector.Each VoIP stream has an average data rate of around13 kbps,peak data rate of34 kbps, and packet size ofLmax = 128bytes. We temporally interleave different VoIP streams togenerate 5 different aggregate traffic traces, each with a datarate of ρavg
i = 100kbps. The results shown in statisticalexperiments are average values over 10 test runs with differentrandom number seed used to select VoIP traces and initiate

Scenario Topology ESS PSS OPQ LSSUnicast/Deterministic Unicast-1 219 263 271 295
Di = 60ms Unicast-2 225 275 284 310Unicast/Statistical Unicast-1 81 121 N/A 319
Di = 45ms Pi = 10−5 Unicast-2 81 117 N/A 292Multicast/Deterministic Multicast-1 221 268 265 292
Di = 60ms Multicast-2 219 249 244 267
TABLE I
FLOWS ADMITTED WITH ESS, PSS, OPQ,AND LSS ALGORITHMS. LENGTH=7, ρavgi = 100Kbps AND σi = 5 Kbits.
0 2 4 6 8 10 12 14 16 18 20Trial Number
200
250
300
350
400
450
500
550
600
Num
ber o
f flo
ws
adm
itted D-ESS
D-OPQD-PSSD-LSS
Unicast-2 Topology
0 2 4 6 8 10 12 14 16 18 20Trial Number
200
250
300
350
Num
ber o
f flo
ws
adm
itted D-MESS
D-MOPQD-MPSSD-MLSS
Multicast-2 Topology
Fig. 8. Number of flows admitted with Unicast-2 and Multicast-2 topologies with deterministic delay guarantees. Hops=7,ρavgi = 100Kbps,
Di = 60ms, σi = 5 Kbits.
new flows. Flow requests arrive with a random inter-arrivaltime between 1000 to 5000 seconds. We perform evaluationsmainly for the ’static’ case in which flow reservations that areprovisioned once stay in the network forever. The WFQ [20]service discipline is employed for packet scheduling at eachlink in order to guarantee the bandwidth shares of flowssharing the same link. In the rest of the section, we presentperformance results for cases of unicast flows with determin-istic and statistical delay requirements, and multicast flowswith deterministic delay requirements. For multicast flows, thememory requirements in the case of statistical trace drivensimulations do not scale in our current system and hence theirresults are not presented.
B. Effectiveness of LSS Algorithm
We first take a snapshot view of the performance of LSSalgorithm in comparison to ESS, PSS and OPQ algorithmsand later examine the impact of different parameters in detail.Table I shows the number of flows admitted over a 7-hoppaths for unicast and multicast flows with deterministic andstatistical delay requirements. Figure 8 plots the numberof flows admitted with deterministic delay guarantees underUnicast-2 and Multicast-2 topologies for different mixes oflink bandwidths. The table and figures demonstrate that in allscenarios, LSS consistently admits more number of flows thanall other algorithms. This is because LSS explicitly attemptsto balance the loads across different links. In contrast, ESSalgorithm does not optimize any specific metric and PSSalgorithm does not explicitly balance the loads among thelinks. Similarly we see that the performance obtained withOPQ algorithm is worse than that with LSS.
The main problem lies not within the OPQ algorithm itself,
but in coming up with a cost metric that accurately captures theload-balancing criteria. In this case, OPQ algorithm performsits work of coming up with a solution that is close to optimalin minimizing the specific cost metric; however, the best cost-metric we can construct turns out to be only an approximationof the final load-balancing optimization objective. Instead ofimplicitly capturing the load-balancing criteria by means of acost function, the LSS algorithm approaches the problem ina reverse fashion by exploring only those slack partitions thatmaintain explicit load balance among the links.
C. Capacity Evolution
In order to understand why the LSS algorithm admits ahigher number of flow requests than other algorithms, wecompare their resource usage patterns. Figure 9 plots theevolution of available link bandwidth on the constituent linksof the Unicast-2 topology when flows require a deterministicend-to-end delay bound of60ms. Figure 10 plots the samecurves when flows require statistical end-to-end delay boundof 45ms and delay violation probability of10−5. We useda smaller statistical delay bound of45ms compared to thedeterministic delay bound of60ms in Figure 9 because, forstatistical case, the difference in performance among differentalgorithms is evident only at smaller delay bounds. Figure 11plots the same curves for Multicast-2 topology with tree depthof 7 when multicast flows require end-to-end deterministicdelay bound of60ms. At any point in time, LSS is able toexplicitly balance the loads on constituent links. On the otherhand, the link loads are imbalanced in the case of ESS, PSSand OPQ algorithms. Specifically, the bandwidth of the linkswith lower capacity is consumed more quickly than that oflinks with higher capacity and consequently fewer number of

0 50 100 150 200 250 300Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
D-ESS on Unicast-2 Topology
0 50 100 150 200 250 300Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
D-PSS on Unicast-2 Topology
0 50 100 150 200 250 300Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
D-OPQ on Unicast-2 Topology
0 50 100 150 200 250 300Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
D-LSS on Unicast-2 Topology
Fig. 9. Evolution of available link capacity with the number of flows admitted for unicast flows with deterministic delay guarantee. Hops=7,ρavg
i = 100Kbps, Di = 60ms, σi = 5 Kbits.
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
S-ESS on Unicast-2 Topology
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
S-PSS on Unicast-2 Topology
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
68 Mbps (0-1)90 Mbps (1-2)158 Mbps (2-3)200 Mbps (3-4) 135 Mbps (4-5)113 Mbps (5-6)45 Mbps (6-7)
S-LSS on Unicast-2 Topology
Fig. 10. Variation in available link bandwidth with the number of flows admitted for unicast flows with statistical delay guarantee. Hops=7,ρavg
i = 100Kbps, Di = 45ms, Pi = 10−5 andσi = 5 Kbits.
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
45 Mbps (0-1)112 Mbps (1-2)194 Mbps (2-3)68 Mbps (3-4) 78 Mbps (4-5)190 Mbps (5-6)50 Mbps (6-7)
M-ESS on Multicast-2 Topology
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
45 Mbps (0-1)112 Mbps (1-2)194 Mbps (2-3)68 Mbps (3-4) 78 Mbps (4-5)190 Mbps (5-6)50 Mbps (6-7)
M-PSS on Multicast-2 Topology
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
45 Mbps (0-1)112 Mbps (1-2)194 Mbps (2-3)68 Mbps (3-4) 78 Mbps (4-5)190 Mbps (5-6)50 Mbps (6-7)
M-OPQ on Multicast-2 Topology
0 40 80 120 160 200 240 280Number of flows admitted
0
0.2
0.4
0.6
0.8
1
Frac
tion
of l
ink
capa
city
rem
aini
ng (R
/C)
45 Mbps (0-1)112 Mbps (1-2)194 Mbps (2-3)68 Mbps (3-4) 78 Mbps (4-5)190 Mbps (5-6)50 Mbps (6-7)
M-LSS on Multicast-2 Topology
Fig. 11. Evolution of available link capacity with the number of flows admitted for multicast flows with deterministic delay guarantee. Treedepth=7,ρavg
i = 100Kbps, Di = 60ms, σi = 5 Kbits.
flows are admitted. Note that a single link with insufficientresidual capacity is enough to render the entire network pathunusable for newer reservations. Among ESS, PSS and OPQalgorithms, OPQ and PSS have similar performance followedby the ESS. The differences in performance arise from theextent to which each algorithm accounts for load-imbalancebetween links. For multicast flows in Figure 11, the capacityevolution curves are not perfectly balanced in the case of D-MLSS due to the fact that the assigned bandwidth on someof the links is lower-bounded by the 100 Kbps average rateof flows which is larger than the ’delay-derived’ bandwidthrequired to satisfy the delay budget at those link.
D. Effect of End-to-end Delay
Figure 12 plots the variation in number of admitted flowsover unicast and multicast topologies as their end-to-end de-terministic delay requirement is varied. With increasing delay,all the four algorithms admit more number of flows, since aless strict end-to-end delay bound translates to lower resourcerequirement at intermediate links. Again, LSS admits moreflows than others since it performs load-balanced partitioning
of the slack in end-to-end delay. A maximum of 450 flowswith 100 Kbps average data rate can be admitted by any ofthe algorithms since the smallest link capacity is 45 Mbps.
E. Effect of End-to-end Delay Violation Probability
Figure 13 plots the variation in average number of admittedflows over unicast and multicast paths as their delay violationprobability bound is varied from10−6 to 10−1 for a45ms end-to-end delay bound. The LSS algorithm is able to admit farmore flows than ESS and PSS algorithms since it can performload-balanced slack sharing along both the dimensions ofdelay as well as delay violation probability. The performancegain for LSS over ESS and PSS is much larger than in thecase of deterministic delay requirements (Figure 12) becauseeven a small increase in delay violation probability yields asignificant reduction in resources assigned to a flow.
F. Effect of Path Length
Figure 14 plots the variation in number of admitted flowshaving deterministic delay requirements of60ms, as the lengthof the unicast path increases. For all the four algorithms, there

0 10 20 30 40 50 60 70 80 90 100Delay (ms)
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-ESSD-OPQD-PSSD-LSS
Unicast-2 Topology
0 10 20 30 40 50 60 70 80 90 100Delay (ms)
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-MESSD-MOPQD-MPSSD-MLSS
Multicast-2 Topology
Fig. 12. Number of flows admitted vs. deterministic end-to-end delay bound for unicast and multicast paths. Hops/Tree depth=7,ρavgi =
100Kbps andσi = 5 Kbits.
1e-07 1e-06 1e-05 1e-04 1e-03 1e-02 1e-01Delay violation probability
50
100
150
200
250
300
Ave
rage
num
ber o
f flo
ws
adm
itted
S-ESSS-PSSS-LSS
Unicast-2 Topology
Fig. 13. Average number of flows admitted vs. end-to-end delayviolation probability bound. Hops=7,Di = 45ms, ρavg
i = 100Kbpsandσi = 5 Kbits. Averages computed over ten simulation runs withdifferent random seeds.
is a drop in the number of flows admitted with increasingpath length because the same end-to-end delay now has to bepartitioned among more number of intermediate hops. Thusincreasing the path length has the effect of making the end-to-end requirement more strict, which in turn translates tohigher resource requirement at the intermediate links. TheLSS algorithm still outperforms the other three algorithms interms of number of flows it can support since it manages thedecreasing slack in delay to counter load imbalance amonglinks.
G. Effect of Burst Size
Figure 15 plots the impact of increase in burst size on thenumber of flows admitted with deterministic delay requirementof 60ms. For all the four algorithms, the number of flowsadmitted drops with increasing burst size. Recall that burstsize contributes to the smoothing delayσi/ρmin
i before theingress node. For larger burst size a bigger fraction of end-to-end delay is consumed at the smoother in Figure 2 andconsequently a smaller fraction of the delay is left for partitionamong links of the unicast/multicast path. As before, the LSSalgorithm still outperforms the other three algorithms in termsof number of admitted flows.
IX. CONCLUSION
Resource provisioning techniques for network flows withend-to-end delay guarantees need to address an intra-pathload balancing problem such that none of the constituentlinks of a selected path exhausts its capacity long beforeothers. By avoiding such load imbalance among the linksof a path, resource fragmentation is less likely and moreflows can be admitted in the long term. We have proposeda load-aware delay budget partitioning algorithm that is ableto solve this intra-path load balancing problem for both unicastand multicast flows with either deterministic or statisticaldelay requirements. In particular, the proposed Load-basedSlack Sharing (LSS) algorithm allocates a larger share ofthe delay slack to more loaded links than to less loadedlinks, thus reducing the load deviation among these links.Through a detailed simulation study, we have shown thatthe LSS algorithm can indeed admit more number of unicastor multicast flows in comparison with three other algorithmsproposed in the literature. The improvement is up to 1.2 timesfor flows with deterministic delay bounds and 2.8 times forstatistical delay bounds.
In a larger context, the proposed delay partitioning algo-rithm is just one component of a comprehensive networkresource provisioning framework. While the proposed algo-rithms are described in the context of a given unicast pathor multicast tree, eventually these algorithms need to beintegrated more closely with other components such as QoS-aware routing or inter-path load balancing to achieve globaloptimization. Quantitatively exploring the inherent interactionsbetween intra-path and inter-path load balancing schemes is afruitful area for future research.
ACKNOWLEDGMENT
We would like to thank Henning Schulzrinne and WenyuJiang for providing the VoIP traces used in our simulations.We would also like to thank Pradipta De, Ashish Raniwala,Srikant Sharma and anonymous reviewers for their insightfulsuggestions that helped improve the presentation of this paper.
REFERENCES
[1] M.S. Kodialam and T.V. Lakshman, “Minimum interference routing withapplications to MPLS traffic engineering,” inProc. of INFOCOM’2000,Tel Aviv, Israel, March 2000, pp. 884–893.

0 1 2 3 4 5 6 7 8 9 10Number of hops in unicast path
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-ESSD-PSSD-OPQD-LSS
Unicast-2 Topology
0 1 2 3 4 5 6 7 8 9 10Tree depth
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-MESSD-MPSSD-MOPQD-MLSS
Multicast-2 Topology
Fig. 14. Number of flows admitted vs. path length.Di = 60ms, ρavgi = 100Kbps andσi = 5 Kbits.
0 1000 2000 3000 4000 5000Burst size (bytes)
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-ESSD-PSSD-OPQD-LSS
Unicast-2 Topology
0 1000 2000 3000 4000 5000Burst size (bytes)
0
50
100
150
200
250
300
350
400
450
Num
ber o
f flo
ws
adm
itted
D-MESSD-MPSSD-MOPQD-MLSS
Multicast-2 Topology
Fig. 15. Number of flows admitted vs. burst size. Hops=7,Di = 60ms, andρavgi = 100Kbps.
[2] A.K. Parekh and R.G. Gallager, “A generalized processor sharingapproach to flow control in integrated services networks: The single-node case,”IEEE/ACM Transactions on Networking, vol. 1(3), pp. 344–357, June 1993.
[3] A. Shenker, C. Partridge, and R. Guerin, “Specification of guaranteedquality of service,” RFC 2212, Sept. 1997.
[4] L. Zhang, “Virtual clock: A new traffic control algorithm for packetswitching networks,” inProc. of ACM SIGCOMM’90, Philadelphia,PA, USA, Sept. 1990, pp. 19–29.
[5] L. Georgiadis, R. Guerin, V. Peris, and K. N. Sivarajan, “Efficient net-work QoS provisioning based on per node traffic shaping,”IEEE/ACMTransactions on Networking, vol. 4(4), pp. 482–501, August 1996.
[6] H. Zhang, “Service disciplines for guaranteed performance service inpacket-switching networks,” inProc. of IEEE, Oct. 1995, vol. 83(10),pp. 1374–1396,.
[7] V. Firoiu and D. Towsley, “Call admission and resource reservation formulticast sessions,” inProc. of IEEE INFOCOM’96, 1996.
[8] K. Gopalan, Efficient Provisioning Algorithms for Network ResourceVirtualization with QoS Guarantees, Ph.D. thesis, Computer ScienceDept., Stony Brook University, August 2003.
[9] R. Nagarajan, J. Kurose, and D. Towsley, “Local allocation of end-to-end quality-of-service in high-speed networks,” inProc. of 1993 IFIPWorkshop on Perf. analysis of ATM Systems, North Holland, Jan. 1993,pp. 99–118.
[10] D.H. Lorenz and A. Orda, “Optimal partition of QoS requirementson unicast paths and multicast trees,”IEEE/ACM Transactions onNetworking, vol. 10, no. 1, pp. 102–114, Feb. 2002.
[11] F. Ergun, R. Sinha, and L. Zhang, “QoS routing with performancedependent costs,” inProc. of INFOCOM 2000, Tel Aviv, Israel, March2000.
[12] M. Kodialam and S.H. Low, “Resource allocation in a multicast tree,”in Proc. of INFOCOM 1999, New York, NY, March 1999.
[13] D. Raz and Y. Shavitt, “Optimal partition of QoS requirements withdiscrete cost functions,” inProc. of INFOCOM 2000, Tel Aviv, Israel,March 2000.
[14] R. Guerin and A. Orda, “QoS-based routing in networks with inaccurateinformation: Theory and algorithms,” IEEE/ACM Transactions onNetworking, vol. 7(3), pp. 350–364, June 1999.
[15] D.H. Lorenz and A. Orda, “QoS routing in networks with uncertain
parameters,” IEEE/ACM Transactions on Networking, vol. 6(6), pp.768–778, December 1998.
[16] D. Ferrari and D.C. Verma, “A scheme for real-time channel estab-lishment in wide-area networks,”IEEE Journal on Selected Areas inCommunications, vol. 8(3), pp. 368–379, April 1990.
[17] H. Zhang and E. Knightly, “Providing end-to-end statistical performanceguarantees with bounding interval dependent stochastic models,” inProc. of ACM SIGMETRICS’94, Nashville, TN, May 1994, pp. 211–220.
[18] M. Reisslein, K.W. Ross, and S. Rajagopal, “A framework for guar-anteeing statistical QoS,”IEEE/ACM Transactions on Networking, vol.10(1), pp. 27–42, February 2002.
[19] A. Demers, S. Keshav, and S. Shenker, “Analysis and simulation ofa fair queuing algorithm,” inProc. of ACM SIGCOMM’89, 1989, pp.3–12.
[20] L. Zhang, “Virtual Clock: A new traffic control algorithm for packet-switched networks,”ACM Transactions on Computer Systems, vol. 9(2),pp. 101–124, May 1991.
[21] J. Liebeherr, D.E. Wrege, and D. Ferrari, “Exact admission control fornetworks with a bounded delay service,”IEEE/ACM Transactions onNetworking, vol. 4(6), pp. 885–901, Dec. 1996.
[22] A.K. Parekh,A generalized processor sharing approach to flow controlin integrated services networks, Ph.D. thesis, Massachusetts Institute ofTechnology, Feb. 1992.
[23] A.K. Parekh and R.G. Gallager, “A generalized processor sharingapproach to flow control in integrated services networks: The multiple-node case,”IEEE/ACM Transactions on Networking, vol. 2(2), pp. 137–152, April 1994.
[24] D.H. Lorenz and A. Orda, “Optimal partition of QoS requirements onunicast paths and multicast trees,” inProc. of INFOCOM’99, March1999, pp. 246–253.
[25] W. Jiang and H. Schulzrinne, “Analysis of On-Off patterns in VoIPand their effect on voice traffic aggregation,” inProc. of ICCCN 2000,March 1996.