Embed Size (px)
Citation preview

De theorie van trilvoeders
Citation for published version (APA):Matthijssen, P. W. A. (1991). De theorie van trilvoeders. (TH Eindhoven. Afd. Werktuigbouwkunde, VakgroepProduktietechnologie : WPB; Vol. WPA1040). Eindhoven: Technische Universiteit Eindhoven.
Document status and date:Gepubliceerd: 01/01/1991
Document Version:Uitgevers PDF, ook bekend als Version of Record
Please check the document version of this publication:
• A submitted manuscript is the version of the article upon submission and before peer-review. There can beimportant differences between the submitted version and the official published version of record. Peopleinterested in the research are advised to contact the author for the final version of the publication, or visit theDOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and pagenumbers.Link to publication
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal.
If the publication is distributed under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license above, pleasefollow below link for the End User Agreement:
www.tue.nl/taverne
Take down policyIf you believe that this document breaches copyright please contact us at:
providing details and we will investigate your claim.
Download date: 25. Feb. 2019

TECHNISCHE UNIVERSITEIT EINDHOVEN
FACULTEIT DER WERKTUIGBOUWKUNDE
VAKGROEP PRODUKTIETECHNOLOGIE EN -AUTOMATISERING (WPA)
Verslag literatuuronderzoek
\
Literatuuronderzoek naar:
DE THEORIE VAN TRlLVOEDERS
Door: P.W.A Matthijssen
Rapportnummer: WP A-I040
In opdracht van: Prof.ir. J.M. van Bragt
Onder begeleiding van: Ir. A.T.J.M. Smals
Eindhoven, maart 1991

SAMENYATnNG
Dit literatuuronderzoek beschrijft de stand van zaken betreffende de theorie van
trilvoeders. De botsingstoestand wordt uitgebreid bekeken en blijkt een grote invloed te hebben
op het deeltjestransport. Vervolgens worden een aantal grootheden welke invloed hebben op de voedingssnel
heid afzonderlijk behandeld, waarna enkele verbeteringen met betrekking tot deze
voedingssnelheid worden belicht. Er blijkt een sterke samenhang tussen de verschil
lende grootheden te bestaan.
Er is nog onvoldoende kennis over deze samenhang en ook over de exacte invloed
van deeltjeseigenschappen op het deeltjestransport. Hierdoor blijkt het tot nog toe
ruet mogelijk te zijn, om een eenduidige ontwerpprocedure voor een trilvoeder op te
stellen.
------------------------------ 2 -----------------------------

INHOUDSOPGAVE
SAMENV ATTING
1. INLEIDING
2. DEELTJESBEWEGINGEN IN EEN TRILVOEDER
2.1. BEWEGINGSTOESTANDEN
2.2. BOTSINGSVERLOOP
2.3. WERKELIJKE DEELTJESBEWEGINGEN
2
4
6
6
8 10
3. ONTWERP VAN EEN TRILVOEDER 12
3.1. INVLOEDSGROOTHEDEN OP DE VOEDINGSSNELHEID 12
3.1.1. Frequentie
3.1.2. Normaalversnelling
3.1.3. Hellingshoek
3.1.4. Veerhoek
3.1.5. Wrijvingscoefficient
3.1.6. Deeltjeseigenschappen
3.1.7. Inhoud van de richtbak
3.1.8. Vorm van de richtbak
3.2. MOGELIJKE VERBETERINGEN
3.2.1. Faseverschuiving
3.2.2. Niet·sinusoldale aanstoting
3.3. BEP ALING EIGENFREQUENTIES
3.4. AANSTOTINGSMETHODEN
3.4.1. Elektromagneet
3.4.2. Motor met onbalans
3.4.3. Direkte aanstoting
3.5. ONTWERPPROCEDURES
4. CONCLUSIES
LlTERATUUR
12
13
13
13
14
14
15
16
18
18 19
20 21
21
21
22
22
26
27
--------------------------3 -------------------------
1. INLEJDING
In de automatische assemblage worden trillende toevoersystemen al sinds jaren in
grote aantallen gebruikt. Voor bulkmaterialen worden voora! reehte trilgoten
gebruikt. Deze dienen o~k vaak als een verbinding tussen versehillende delen van een
toevoerinrichting. Afzonderlijke onderdelen (sehroeven, moeren, elektronicaonderde
len em.) worden voornamelijk door ronde trilvoeders toegevoerd (figuur 1).
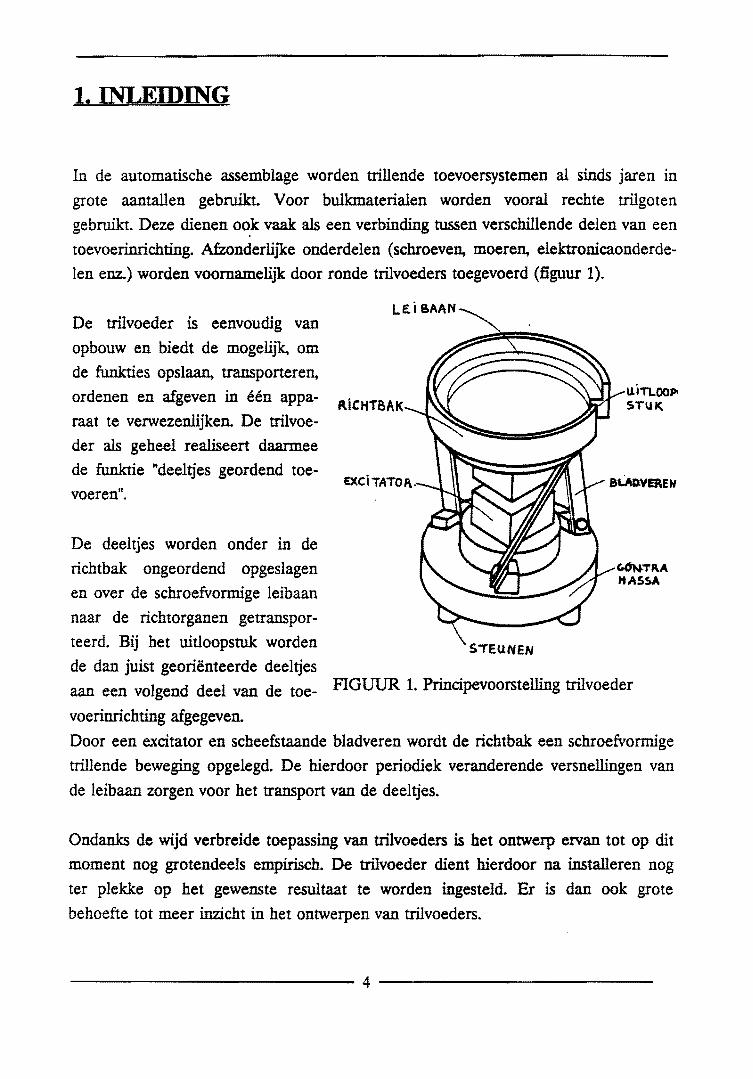
De trilvoeder is eenvoudig van
opbouw en biedt de mogelij~ om de funkties opslaan, transporteren,
ordenen en afgeven in een appa- RicHTSAK
raat te verwezenlijken. De trilvoe-
der als geheel realiseert daarmee
de funktie "deeltjes geordend toe
voeren".
De deeltjes worden onder in de
richtbak ongeordend opgeslagen
en over de schroefvormige leibaan
naar de richtorganen getranspor
teerd. Bij het uitloopstuk worden
de dan juist georienteerde deeltjes
u.iTLOOP STUJ<,
aan een volgend deel van de toe- FIGUUR 1. Principevoorstelling trilvoeder
voerinrichting afgegeven.
Door een excitator en scheefstaande bladveren wordt de riehtbak een schroefvormige
trillende beweging opgelegd. De hierdoor periodiek veranderende versnellingen van
de leibaan zorgen voor het transport van de deeltjes.
Ondanks de wijd verbreide toepassing van trilvoeders is het ontwerp ervan tot op dit
moment nog grotendeels empirisch. De trilvoeder dient hierdoor na installeren nog
ter plekke op het gewenste resultaat te worden ingesteld. Er is dan ook grote
behoefte tot meer inzicht in het ontwerpen van trilvoeders.
----------------------------------------- 4 ------------------------------

----------------------- INLEIDING -----------------------
Mijn opdracht was om de in de laatste jaren gepubliceerde literatuur betreffende de
theorie van trilvoeders bij elkaar te zoe ken en systematisch in een verslag in te delen.
Bij het uitvoeren van de opdracht is gebruik gemaakt van de projektstrategie (zie
diktaat van Bragt). Geraadpleegde bronnen zijn VUBIS, Engineering Index en het
CD-ROM-systeem.
----------------------------- 5 -----------------------------
2. DEELT.IESBEWEGINGEN IN EEN TRILVOEDER
2.1. BEWEGINGSTOESTANDEN:
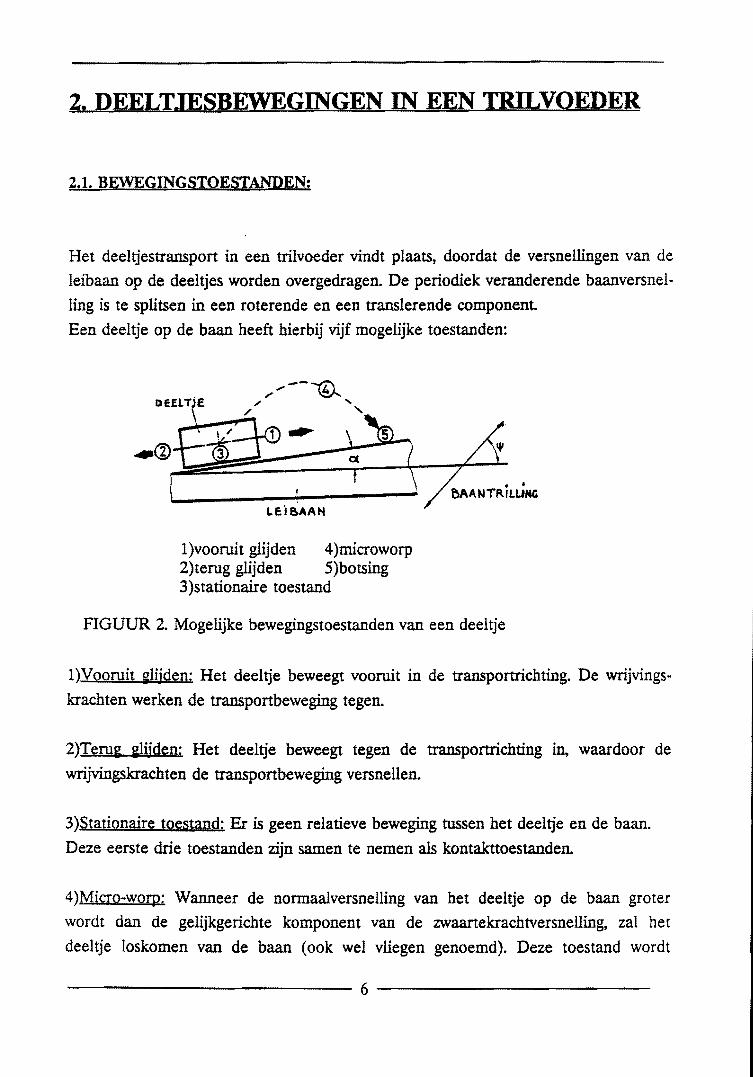
Het deeltjestransport in een trilvoeder vindt piaats, doordat de versnellingen van de
leibaan op de deeltjes worden overgedragen. De periodiek veranderende baanversnel
ling is te splitsen in een roterende en een translerende component
Een deeltje op de baan beeft hierbij vijf mogelijke toestanden:
LE.iSAAH
l)vooruit glijden 4)microworp 2)terug glijden 5)botsing 3)stationaire toestand
FIGUUR 2. Mogelijke bewegingstoestanden van een deeltje
l)Vooruit ~lijden: Het deeltje beweegt vooruit in de transportrichting. De wrijvings
krachten werken de transportbeweging tegen.
2)Teru~ ~ijden; Het deeltje beweegt tegen de transportrichting in, waardoor de
wrijvingskrachten de transportbeweging versnellen.
3)Stationaire toestand: Er is geen relatieve beweging russen bet deeltje en de baan.
Deze eerste drie toestanden zijn samen te nemen als kontakttoestanden.
4 ) Micro-worp: Wanneer de normaalversnelling van het deeltje op de baan grater
wordt dan de gelijkgerichte komponent van de zwaartekrachtversnelling, zal het
deeltje loskomen van de baan (ook weI vliegen genoemd). Deze toestand wordt
---------------------------- 6 ---------------------------
----- DEELTJESBEWEGINGEN IN EEN TRILVOEDER ---
gekarakteriseerd door de werp-coefficient r = Aul go > 1.
5)Botsing: Na de micro-worp botst het deeltje terug op de baan. De botsing tussen
deeltje en baan mag bij bulkmaterialen met een relatieve hoge demping tussen de
deeltjes onderling als volledig plastisch worden verondersteld. De deeltjes passen zich
dan gelijk na de botsing weer aan aan de beweging van de baan. Voor het toevoeren
van afzonderlijke onderaelen gaat deze veronderstelling echter niet meer op. De
botsing moet dan als gedeeltelijk elastisch worden gezien. TIjdens de botsing komt het
tot een ~ulsachtig verloop in de versne1]jngwan het deeltje, omdat het deeltje over
een zeer korteweg van-botssn~lheid naar-baansnelheid wordt afgeremd. De kineti
sche energie van het deeltje is bepalend voor het verloop van de botsing.
Een uitgebreide beschrijving van de eerste vier toestanden en de overgangsvoorwaar
den tussen deze toestanden onderling is te vinden in Smals/Koumans(1988). Vanuit
de baanbewegingen worden met behulp van een aantal evenwichtsvergelijkingen de
deeltjesbewegingen met overgangsvoorwaarden afgeleid. De vijfde toestand wordt
daarin echter buiten beschouwing gelaten en wordt verderop dan ook nog nader
belicht.
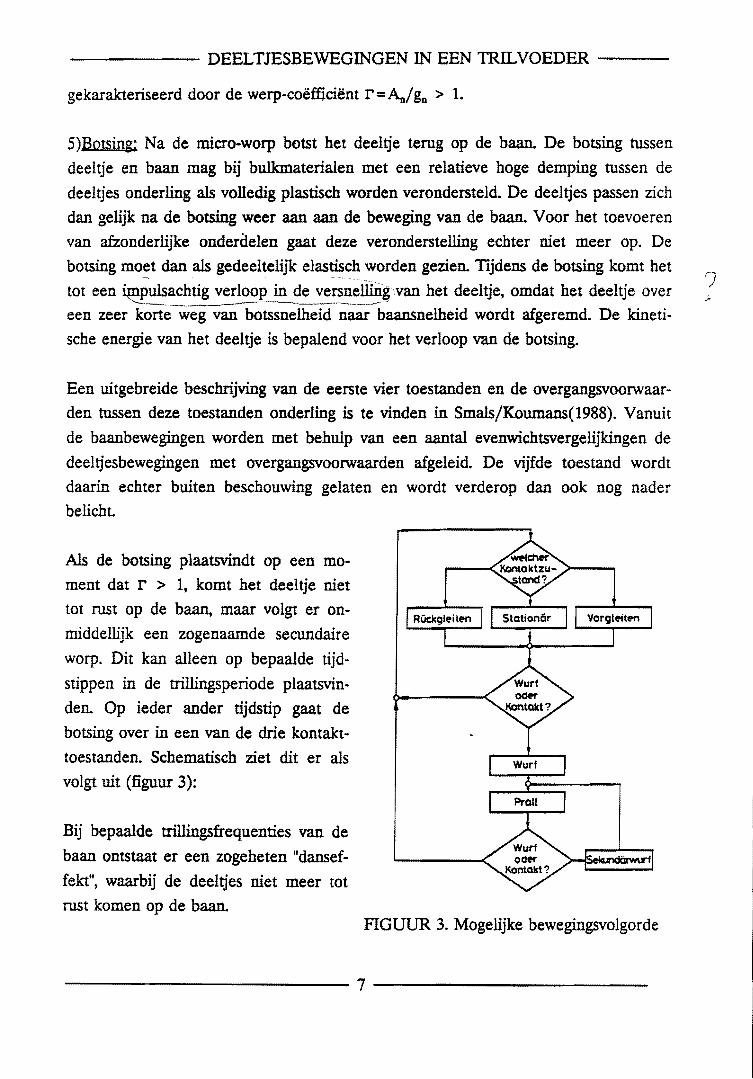
Als de botsing plaatsvindt op een mo
ment dat r > 1, komt het deeltje niet
tot rust op de baan, maar voIgt er on
middellijk een zogenaamde secundaire
worp. Dit kan alleen op bepaalde tijd
stippen in de trillingsperiode plaatsvin
den. Op ieder ander tijdstip gaat de
botsing over in een van de drie kontakt
toestanden. Schematisch ziet dit er als
voIgt uit (figuur 3):
Bij bepaalde trillingsfrequenties van de
baan ontstaat er een zogeheten "dansef
fekt", waarbij de deeltjes niet meer tot
rust komen op de baan. FIGUUR 3. Mogelijke bewegingsvolgorde
----------------------------- 7 ------------------------------

------ DEELTJESBEWEGINGEN IN EEN TRILVOEDER ---
Om terugvallen van deeltjes tegen te gaan maakt de leibaan altijd een kleine hoek
met de wand van de richtbak. Dit betekent, dat er ook altijd een wrijvingskracht is \
tussen de deeltjes en de wand. Abrens(1983) he eft deze wandinvloed nader bekeken. ,{Jj Daar de invloed gering blijkt te zijn, wordt hij hier buiten beschouwing gelaten. \ .
2.2. BOTSINGSVERLQQP:
Het verschil in kinetische energie tussen de leibaan en het deeltje met massa m (de
botsenergie) bij het begin van de botsing wordt bepaald door . het snelheidsverschil
V reJ.:
1 2 flE= -.m,vrd
2
Een deel van deze energie wordt omgezet in demping en wrijving. De rest wordt
opgeslagen a1s veerenergie. Daarbij zal eerst de bekleding van de baan vervormen en
indien de botsenergie groot genoeg is ook de baan zelf (zie figuur 4).
a) -
a)begin van de botsing c )vervorming baan
b) -J_~
b )vervorming bekleding d)einde van de botsing
FIGUUR 4. Indringen deeltje bij botsing
Bij de maximale indrukking is de botsenergie volledig opgebruikt en drukt de
veerenergie het deeltje terug naar boven.
Het is van belang, om de versnellingen tijdens de botsing te bepalen. Ahrens(1983)
--------------------------- 8 --------------------------
------ DEELTJESBEWEGINGEN IN EEN TRILVOEDER ---
maakt daanoe onderscheid tussen een beweging in normaal- en in parallelrichting.
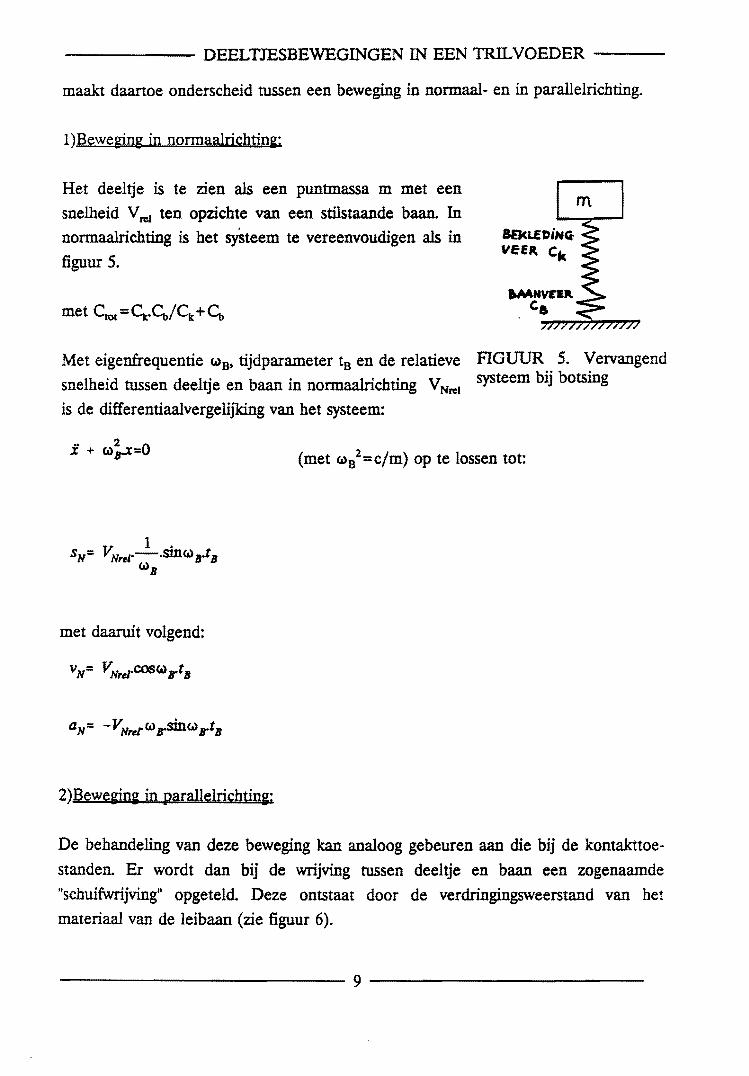
1 )Beweging in normaalrichting;
Het deeltje is te zien als een puntmassa m met een
snelheid V reJ ten opzichte van een stilstaande baan. In
normaalrichting is het sySteem te vereenvoudigen als in
figuur 5.
Met eigenfrequentie (a)B' tijdparameter tB en de relatieve FIGUUR 5. Vervangend snelheid tussen deeltje en baan in normaalrichting V Nrcl systeem bij botsing
is de differentiaalvergelijking van het systeem:
- 2 0 X + Ca>a-X= (met (a)B2=c/m) op te lossen tot:
met daaruit volgend:
2)Beweging in parallelrichting:
De behandeling van deze beweging kan analoog gebeuren aan die bij de kontakttoe
standen. Er wordt dan bij de wrijving tussen deeltje en baan een zogenaamde
"schuifwrijving" opgeteld. Deze ontstaat door de verdringingsweerstand van het
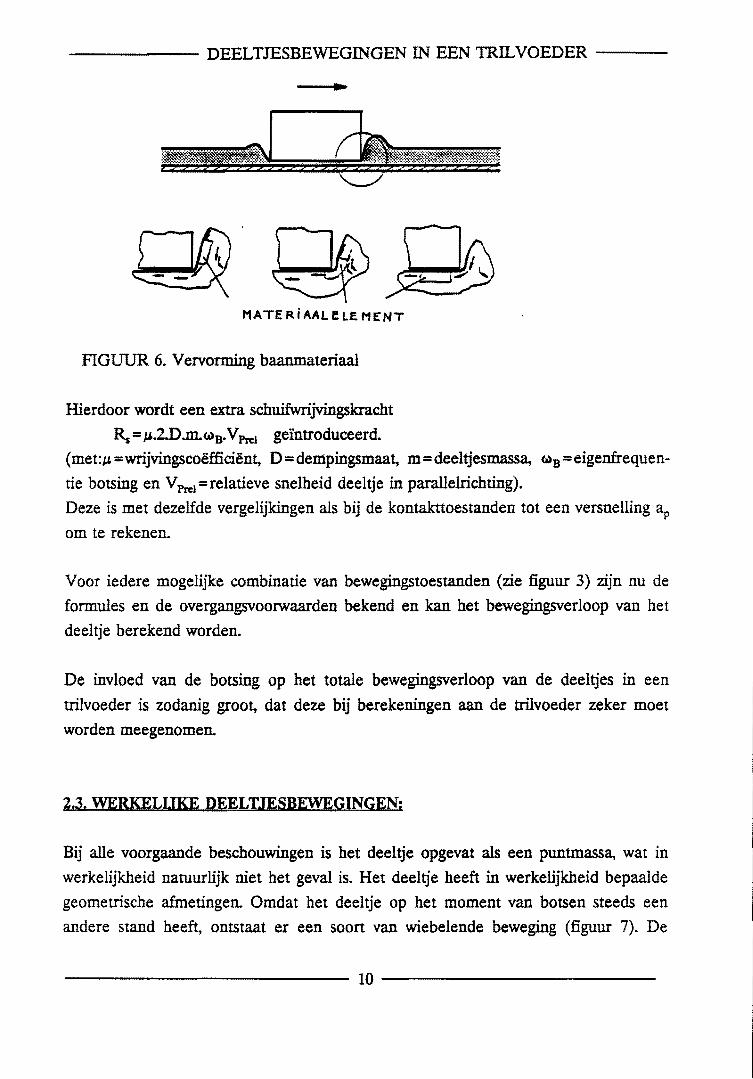
materiaal van de leibaan (zie figuur 6).
------------------------------------------- 9 --------------------------------------------
------ DEELTJESBEWEGINGEN IN EEN TRILVOEDER ---
..
MATE R; AAL f LE. MENT
FIGUUR 6. Vervorming baanmateriaal
Hierdoor wordt een extra schuifwrijvingskracht
Rs = Jo'.2D.m. <alB' V Ptel geintroduceerd (met:Jo' = wrijvingscoefficient, D = deII1pingsmaat, m = deeltjesmassa, <alB = eigenfrequen
tie botsing en V Ptel = relatieve snelheid deeltje in para1lelrichting).
Deze is met dezelfde vergelijkingen als bij de kontakttoestanden tot een versnelling ~
om te rekenen.
Voor iedere mogelijke combinatie van bewegingstoestanden (zie figuur 3) zijn nu de
formules en de overgangsvoorwaarden bekend en kan het bewegingsverloop van het
deeltje berekend worden.
De invloed van de botsing op het totale bewegingsverloop van de deeltjes in een
trilvoeder is zodanig groot, dat deze bij berekeningen aan de trilvoeder zeker moet
worden meegenomen.
2.3. WERKELLIKE DEELTJESBEWEGINGEN;
Bij alle voorgaande beschouwingen is het deeltje opgevat als een puntmassa, wat in
werkelijkheid natuurlijk niet het geval is. Het deeltje heeft in werkelijkheid bepaalde
geometrische afmetingen. Omdat het deeltje op het moment van botsen steeds een
andere stand heeft, ontstaat er een soon van wiebelende beweging (figuur 7). De
--------------------------------------- 10 -------------------------------------

----- DEELTJESBEWEGINGEN IN EEN TRILVOEDER ---
opwerphoogte van het deeltje kan daarbij oplopen tot enkele mm's.
HiPPEN POsiTiE aM" i t t i
10 20 30 40 50 mm
FIGUUR 7. Werkelijke beweging deeltje
60 WEtE
..
Zeker bij het gebruik van richtorganen moet dit gedrag van de deeltjes in acht
worden genomen.
Er kan gesteld worden, dat de micro-warp vele nadelen met zich meebrengt, zoals
onbetrouwbaarheid. lawaai en beschadiging van deeltjes. De te bereiken voedingssnel
heid is echter veel grater dan bij enkel glijbewegingen (waarbij altijd r < 1). Voor
iedere situatie za1 apart bekeken moe ten worden, of de micro-warp achterwege kan
blijven.
-------------- 11 --------------

3. ONTWERP VAN EEN TRILVOEDER
In dit hoofdstuk worden een aantal zaken bekeken, welke van belang zijn bij het
ontwerp van een trilvoeder.
3.1. INYLOEDSGROOTIiEDEN OP DE VOEDINGSSNELHEID:
De belangrijkste grootheid van een trilvoeder
is de gemiddelde voedingssnelheid (in het
vervolg V m). Er zijn een aantal grootheden
welke invloed hebben op V m' Deze worden
afzonderlijk bekeken, waarbij nu al opge
merkt kan worden, dat er een sterke samen
hang is tussen deze grootheden. Het volgend
model wordt gebruikt (figuur 8):
3.1.1. Freqyentie:
,
FIGUUR 8. Model trilvoeder
Bij een constante baanversnelling (~/&t = constant) blijkt V m omgekeerd evenredig te
zijn met de aanstotingsfrequentie. dus:
f.V m = constant Het is daarom gunstig om de frequentie laag te bouden en de amplitude bijgevolg
groot. De lagere frequentie heeft bovendien een lager geluidsniveau tot gevolg. Een
beperking is, dat bij een te lage frequentie (en grote amplitude) er problemen kunnen
ontstaan bij de koppeling van de trilvoeder met een stationaire machine.
Meestal is bet echter gebruikelijk uit het oogpunt van energiebesparing om de
trilvoeder in het gebied van de eigenfrequentie aan te stoten. Door een juiste keuze
van de veren is bij een bepaalde aanstotingsfrequentie de eigenfrequentie van de
trilvoeder aan te passen.
12 -------------

-------- ONTWERP VAN EEN TRILVOEDER -----
3.1.2. N ormaalversnelling:
Deze wordt gekarakteriseerd door de reeds eerder geintroduceerde werpcoefficient r. (=Au/gn)' Een verhoging van r he eft door de langere periodes van vliegen van de deeltjes een verhoging van V m tot gevolg. Bij bepaalde (voor iedere specifieke situatie andere) waarden van r zullen er secundaire worpen optreden, wat tot een onregelma
tig transport kan leiden. Boven een bepaalde waarde van r neemt V m niet meer toe.
Dit is te verklaren, doordat boven deze waarde de deeltjes zolang los van de baan
zullen zijn, dat ze geen voldoende tijd meer hebben om zich aan de snelheid van de
baan aan te pass en. Met de werpcoefficient neemt ook de werphoogte van de deeltjes
toe. Zeker bij het gebruik van richtorganen moet deze beperkt blijven.
Er moet dus een grens gesteld worden aan r, afhankelijk van de situatie. In de praktijk wordt r niet hoger dan 4 genomen en dikwijIs nog een stuk lager (vooral met
kwetsbare deeltjes).
3.1.3. Hellingshoek:
Bij toenemende hellingshoek a van de leibaan zal de deeltjessnelheid dalen. Dit
verb and is bijna lineair, totdat bij een bepaalde hellingshoek de snelheid plots daalt. Bij welke hoek dit gebeurt hangt af van de andere invloedsgrootheden.
Door dit afnemende verband zal de snelheid bij a = 00, dus onder in de richtbak, het
grootst zijn. De deeltjes onder in de bak zullen die op de baan daarom naar boven
duwen. Dit effect kan problemen (klemming) veroorzaken bij de richtorganen.
De reeds eerder genoemde kleine hoek van de baan met de wand van de richtbak
blijkt nauwelijks invloed op V m te hebben. In de praktijk wordt deze tussen 5°-7° genomen.
3.1.4. Veerhoek:
De veerhoek bepaalt de werphoek van de deeltjes volgens tJr = B-a. Bij toenemen van
13-------------

-------- aNTWERP VAN EEN TRILVOEDER -----
de parallelversnelling, dus verkleinen van de veerhoek a, neemt V m toe. Voor elke
gegeven situatie is er een waarde voor a te vinden, waarvoor V m maximaal is. Een
beperking is, dat de werphoek t niet kleiner mag worden dan 8° om storingen tegen
te gaan.
3.1.5. Wrijvingscoefficient:
De voedingssnelheid neemt toe met een toenemende wrijvingscoefficient IJ. tussen
baan en deeltje. Dit komt, doordat het deeltje zich bij een hogere wrijvingscoefficient beter aan de snelheid van de baan aan kan passen in de tijd tussen neerkomen en
opnieuw loslaten. De invloed van variatie van IJ. op V m is voor lage waarden van /J
het grootst. Voor hogere waarden van de normaalversnelling (~>3g) heeft /J geen
invloed meer, omdat V m dan geheel door de micro-worp wordt bepaald.
De bogere wrijvingscoefficient wordt in de praktijk gerealiseerd door bekleding van
de leibaan met een geschikte kunststof of rubber. Een bijkomend voordeel is een reductie van het geluidsniveau.
3.1.6. Deeltjeseigenscbappen:
De te transporteren deeltjes stellen beperkingen aan de maximaal toelaatbare
voedingssnelbeid. Hoe kwetsbaarder de deeltjes, des te kleiner zijn de toelaatbare
normaal-en parallelversnellingen.
In bet algemeen zal bet zo zijn, dat aIle soorten deeltjes dezelfde tendensen in de
voedingssnelheid zullen hebben bij variatie van de ingangsparameters. De exacte
invloed is ecbter nog sterk afhankelijk van de specifieke eigenscbappen van bet
deeltje. Over de precieze invloed van de deeltjeseigenscbappen is nog weinig bekend.
Het is aan te bevelen, om met ieder te transporteren deeltje vooraf enkele metingen
uit te voeren.
14 --------------------------
-------- ONTWERP VAN EEN TRILVOEDER -----
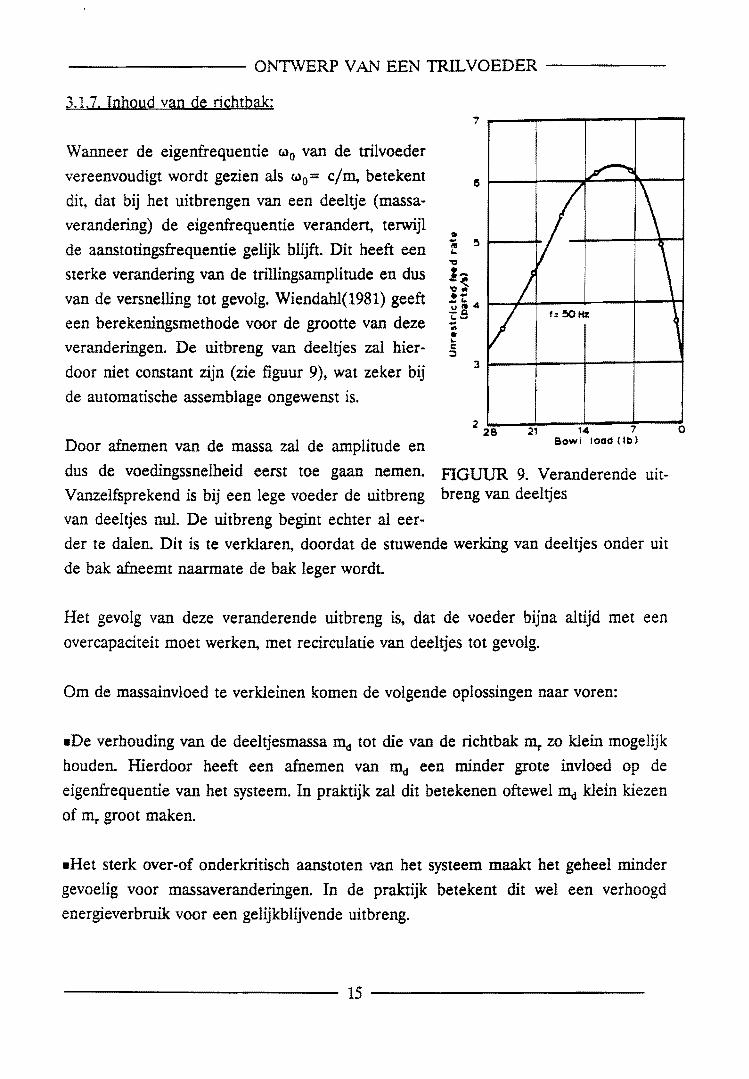
3.1.7. Inhoud van de richtbak:
Wanneer de eigenfrequentie tUo van de trilvoeder
vereenvoudigt wordt gezien als tUo= elm, betekent
dit, dat bij het uitbrengen van een deeltje (massa
verandering) de eigenfrequentie verandert, terwijl
de aanstotingsfrequentie gelijk bUjft. Dit heeft een
sterke verandering van de trillingsamplitude en dus
van de versnelling tot gevolg. Wiendah1(1981) geeft
een berekeningsmethode voor de grootte van deze
veranderingen. De uitbreng van deeltjes zal hier
door niet constant zijn (zie figuur 9), wat zeker bij
de automatische assemblage ongewenst is.
Door afnemen van de massa zal de amplitude en
7 ~--~--~----~---,
61---+---,j'--~---;
31---....,..--+---;-----1
2 2~e-~21~-"':" .. !:---7;---:.O Bowl load (II)
dus de voedingssneiheid eerst toe gaan nemen. FIGUUR 9. Veranderende uitVanzelfsprekend is bij een lege voeder de uitbreng breng van deeltjes
van deeltjes nul. De uitbreng begint echter al eer-
der te dalen. Dit is te verklaren, doordat de stuwende werking van deeltjes onder uit
de bak afneemt naarmate de bak leger wordt.
Het gevolg van deze veranderende uitbreng is, dat de voeder bijna altijd met een
overcapaciteit moet werken, met recirculatie van deeltjes tot gevolg.
Om de massainvloed te verkleinen komen de volgende oplossingen naar voren:
.De verhouding van de deeltjesmassa ~ tot die van de richtbak II1r zo klein mogelijk
houden. Hierdoor heeft een afnemen van md een minder grote invloed op de
eigenfrequentie van het systeem. In praktijk zal dit betekenen oftewel ~ klein kiezen
of II1r groot maken .
• Het sterk over-of onderkritisch aanstoten van het systeem maakt het geheel minder
gevoelig voor massaveranderingen. In de praktijk betekent dit weI een verhoogd
energieverbruik voor een gelijkblijvende uitbreng.
-------------------------- 15 --------------------------
-------- ONTWERP VAN EEN TRILVOEDER -----
.Een principe met een "losse bodem". De bodem van de richtbak is hierbij ontkop
peld van de baan en trilt niet mee, maar steunt op de contramassa.
Het is ook mogelijk om niet de massagevoeligheid van het systeem te bei'nvloeden,
maar de uitbreng van deeltjes te regelen en weI als voIgt:
.Detectoren aanbrengen op een baan buiten de voeder waar zich een rij van deeltjes
vormt. Bij een bepaalde Iengte van deze rij schakelen de detectoren de voeder aan of
uit.
.Een detector in de richtbak, welke bij een bepaald voorraadniveau een tweede
voeder activeert, die de richtbak dan weer bijvult (md constanter houden). Deze
methode heeft het bijkomend voordeel, dat er een veel grotere deeltjesvoorraad
mogelijk is, dan in een enkele voeder .
• Een optimale (maar ook dure) oplossing is te bereiken met een regelkring, welke
constant de trillingsamplitude van de baan meet en indien nodig de aanstootkracht aanpast. Bij iedere vulgraad van de richtbak is dan een zelfde uitbreng van deeltjes verzekerd.
3.1.8. Vorm van de richtbak:
Als eerste kan gesteld worden. dat een kleine scheefstelling van de richtbak door
onnauwkeurig uitrichten een grote invloed kan hebben op de gemiddelde voedings
snelheid (onafhankelijk van de vorm van de richtbak). Door verschillende hellingshoe
ken ontstaan er dan namelijk verschillende deeltjessnelheden en dientengevolge
interakties tussen de deeltjes en storingen in de voeding.
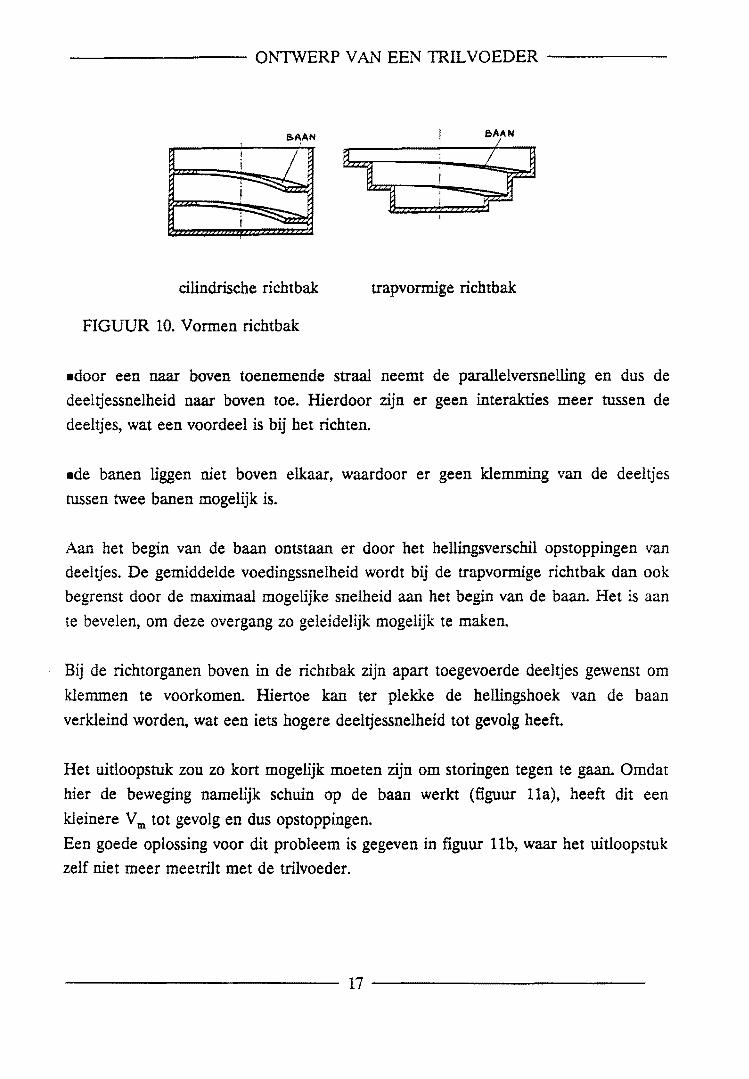
De twee meest gebruikte vormen voor de richtbak zijn de cilindrische en de trapvor
mige richtbak (figuur 10).
De trapvormige richtbak heeft de volgende voordelen ten opzichte van de cilindrische:
16 --------------------------
-------- ONTWERP VAN EEN TRILVOEDER -----
a.AAN
I / j , I ~
, ...........
cilindrische richtbak trapvormige richtbak
FIGUUR 10. Vormen richtbak
.door een naar boven toenemende straal neemt de parallelversnelling en dus de
deeltjessnelheid naar boven toe. Hierdoor zijn er geen interakties meer tussen de
deeltjes, wat een voordeel is bij het richten .
• de banen liggen niet boven elkaar, waardoor er geen klemming van de deeltjes
tussen twee banen mogelijk is.
Aan het begin van de baan ontstaan er door het hellingsverschil opstoppingen van
deeltjes. De gemiddelde voedingssnelheid wordt bij de trapvormige richtbak dan ook
begrenst door de maximaal mogelijke snelheid aan het begin van de baan. Het is aan
te bevel en, om deze overgang zo geleidelijk mogelijk te maken.
Bij de richtorganen boven in de richtbak zijn apart toegevoerde deeltjes gewenst om
klemmen te voorkomen. Hiertoe kan ter plekke de hellingshoek van de baan
verkleind worden, wat een iets hogere deeltjessnelheid tot gevolg heeft.
Het uitloopstuk zou zo kort mogelijk moeten zijn om storingen tegen te gaan. Omdat
hier de beweging namelijk schuin op de baan werkt (figuur lla), heeft dit een
kleinere V m tot gevolg en dus opstoppingen.
Een goede oplossing voor dit probleem is gegeven in figuur lIb, waar het uitloopstuk
zelf niet meer meetrilt met de trilvoeder.
17 -------------
-------- ONTWERP VAN EEN TRILVOEDER -----
I1a )vast uitloopstuk lIb )los uitloopstuk
FIGUUR 11. Uitloopstuk
,3.2. MOGELIJKE VERBETERINGEN:
Tot nu toe is er steeds uitgegaan van een sinusoldale aanstoting van de richtbak,
welke tegelijkertijd de trillingscomponent in normaal-en parallelrichting veroorzaakt.
Het blijkt echter gunstig te zijn am deze componenten te ontkoppelen of om gebruik
te maken van een niet-sinusoldale excitatie.
3.2.1. Faseverschuivinji:
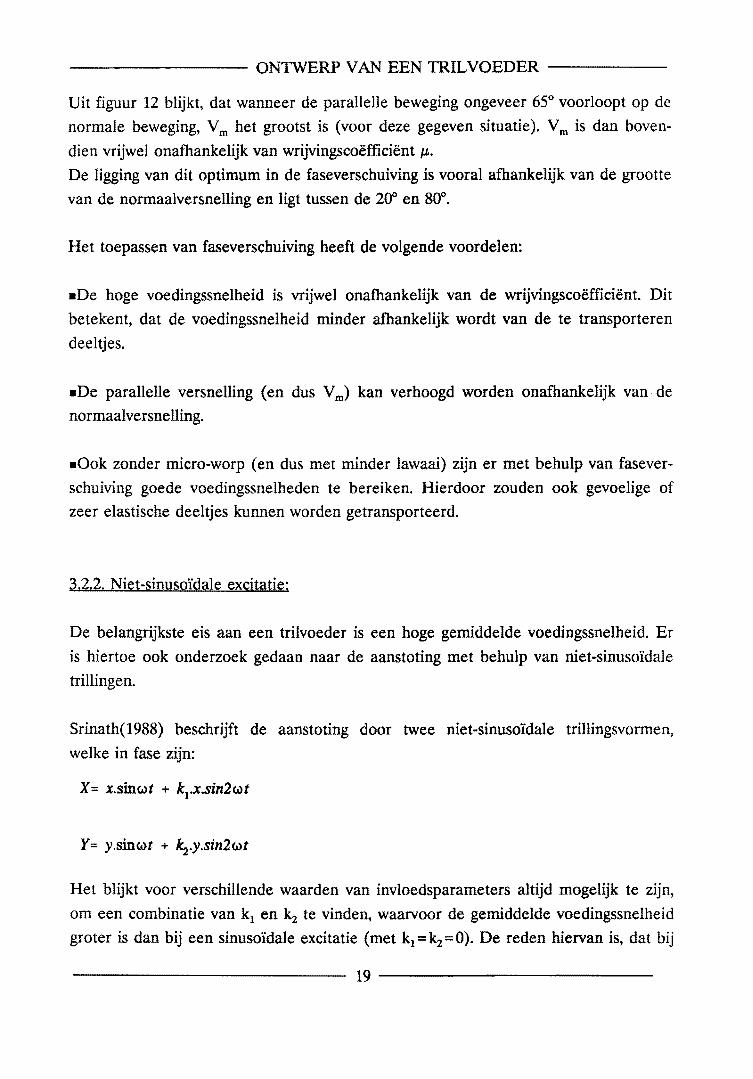
Voor een hoge voedingssnelheid moet de parallelle component van de trilling groat
zijn. Dit heeft echter bij conventionele voeders oak een hoge normaalversnelling tot
gevolg. wat meestal ongewenst is. De voedingssnelheid in conventionele voeders is
bovendien ook erg gevoelig
voor veranderingen in de
wrijvingscoefficient (zie fl-
guur 12 bij y =0). Vmf
140~--~--~~~~----------~-~
Bij een zogeheten twee-fasen (Hz.inJs) -70
'1 d .. d al -140 r'----r-Tt---r~:s;--;-~1E~r!!f!l tn voe er ZlJn e norm e en L-.J.--1J.--d--~;:::=~::~ parallelle bewegingen van de -21~80 -120 -60 0 60 120
baan onafuankeUjk en uitF ASE VE RoSC.H iL .., (deg)
fase. Dit heeft een elliptische FIGUUR 12. Faseverschuiving
beweging van de baan tot
gevolg.
18 -------------
-------- ONTWERP VAN EEN TRILVOEDER -----
Uit figuur 12 blijkt. dat wanneer de parallelle beweging ongeveer 65° voorloopt op de
normale beweging, V m het grootst is (voor deze gegeven situatie). V m is dan boven
dien vrijwel onafbankelijk van wrijvingscoefficient J.I..
De ligging van dit optimum in de faseverschuiving is vooral afbankelijk van de grootte
van de normaalversnelling en ligt tussen de 20° en 80°.
Het toepassen van faseverschuiving heeft de volgende voordelen:
.De hoge voedingssnelheid is vrijwel onafbankelijk van de wrijvingscoefficient. Dit
betekent, dat de voedingssnelheid minder afhankelijk wordt van de te transporteren
deeltjes .
• De parallelle versnelling (en dus V m) kan verhoogd worden onafhankelijk van de
normaalversnelling .
• Ook zonder micro-worp (en dus met minder lawaai) zijn er met behulp van fasever
schuiving goede voedingssnelheden te bereiken. Hierdoor zouden ook gevoelige of zeer elastische deeltjes kunnen worden getransporteerd.
3.2.2. Niet-sinusoYdale excitatie:
De belangrijkste eis aan een trilvoeder is een hoge gemiddelde voedingssnelheid. Er
is hiertoe ook onderzoek gedaan naar de aanstoting met behulp van niet-sinusoldale
trillingen.
Srinath(1988) beschrijft de aanstoting door twee niet-sinusoYdale trillingsvormen,
welke in fase zijn:
X= x.sincut + k1,x.sin2cut
Y::: y.sincut + /s..y.sin2cut
Het blijkt voor verschillende waarden van inv}oedsparameters altijd mogelijk te zijn,
om een combinatie van kl en k2 te vinden, waarvoor de gemiddelde voedingssnelheid
groter is dan bij een sinusoYdale excitatie (met kl =k2=0). De reden hiervan is, dat bij
19-----------------------

-------- ONTWERP VAN EEN TRILVOEDER -----
die waarden van kl en k2 de tijdsduur van achterwaarts glijden sterk gereduceerd
wordt ten opzichte van die van voorwaarts glijden en vliegen.
Het is ook mogelijk. om met sinusoi'dale excitatie de micro-worp achterwege te laten
(met bijkomende voordelen). Okabe(1985) benadert daartoe de snelheid van de niet
sinusoldale trilling door zes rechte lijnen. Er worden verder vijf zogeheten "distortion
factors" gedefinieerd.
Er is vervolgens een optimale trillingsvorm te berekenen met bijbehorende waarden
voor de "distortion factors". De deeltjessnelheid wordt bij aanstoting met deze
optimale trillingsvorm nooit negatief. Hierdoor wordt de geroiddelde voedingssnelheid
relatief haag ten opzichte van die bij sinusoi'dale aanstoting.
De aanstoting met behulp van niet-sinusoldale trillingsvormen blijft zeker een item
voor verder onderzoek.
3.3. BEPALING EIGENFREQUENTIES:
Voor een hoge effektiviteit worden de meeste trilvoeders aangestoten rand hun
eigenfrequentie. Deze werd tot nu toe experimenteel vastgesteld. Het is echter
wenselijk, om deze eigenfrequentie vooraf te kunnen
voorspellen.
Okabe(1981) beschrijft een eenvoudig model met een
graad van vrijheid voor trilvoeders. Dit resulteert in een
formule, waarmee een eigenfrequentie berekend kan
worden. Deze blijkt vrij goed met de werkelijkheid
overeen te komen.
Vanwege twijfels over de geldigheid van dit model is er
door Morrey(1986) een nieuw model ontwikkeld met
acht graden van vrijbeid (figuur 13).
r
~"""!'"'--!---.. x
Met behulp van evenwicbtsvergelijkingen in de verbin- FIGUUR 13. Model met 8 dingspunten tussen richtbak, contramassa en veren vrijbeidsgraden
wordt er een symrnetrische 8x8 matrix Kx opgesteld. Na
-------------20-------------

-------- ONTWERP VAN EEN TRILVOEDER -----
het opstellen van een 8x8 massamatrix Mx is de volgende vergelijking geldig:
Hieruit zijn de eigenfrequenties als voIgt te berekenen:
met: (&)0 = eigenfrequenties en
Xn = trillingsvormen (n = 1,2 ... 8)
Na een test met behulp van modale analyse blijken de eerste drie met het model
berekende eigenfrequenties goed overeen te komen met de werkelijkheid. Dit kan
van grote waarde zijn bij het ontwerp van een trilvoeder.
J.4. AANSTOTlNGSMETHODEN:
Er zijn versehillende method en om een trilling op de trilvoeder aan te brengen.
waarvan hier de voornaamste zullen worden behandeld.
3.4.1. Elektromagneet:
(Soms ook weI pneumatiseh) Dit is voor ronde trilvoeders de meest gebruikte
methode van aanstoten. De trilvoeder is hier uitgevoerd als een massa-veer-systeem
met meestal een aanstotingsfrequentie in de buurt van de eigenfrequentie. Bij deze
methode is een onafhankelijke horizontale en vertikale aanstoting eenvoudig te
realiseren.
3.4.2. Motor met onbalans:
Deze methode wordt vooral gebruikt bij reehte trilgoten. Ook hier wordt in het
gebied van de eigenfrequentie aangestoten. Het zou ook hier gewenst kunnen zijn om
zonder miero-worp te werken. De normaalversnelling is hiertoe te verkleinen door de
motor pendelend te lageren en de trilgoot op gummiveren te plaatsen (figuur 14).
--------------21--------------

-------- ONTWERP VAN EEN TRILVOEDER -----
Socha( 1990) beschrijft een methode om
dan met behulp van bewegingsdifferenti
aalvergelijkingen de verpiaatsing, snel
heid en versnelling van de trilgoot te
berekenen .
... 4" D' kt ' .2. .J. Ire e aanstoun~; MOTOR M [i ON 8ALAN"
Ook deze methode van aanstoten wordt FIGUUR 14. Trilgoot
vooral toegepast bij rechte trilgoten.
Een voordeel van direkte aanstoting ten
opzichte van een massa-veer-systeem is
de lag ere storingsgevoeligheid en de
lagere systeembelasting. Deze aansto
tingsmethode is zo te construeren, dat
de normaalversnelling kleiner blijft dan
de zwaartekrachtversnelling. Omdat de
beide bewegingen geheel ontkoppeld
zijn, is bij deze methode eenvoudig een
fase-verschuiving toe te passen.
3.5.0NJWERPPROCEDURES:
1T I
FIGUUR 15. Direkte aanstoting
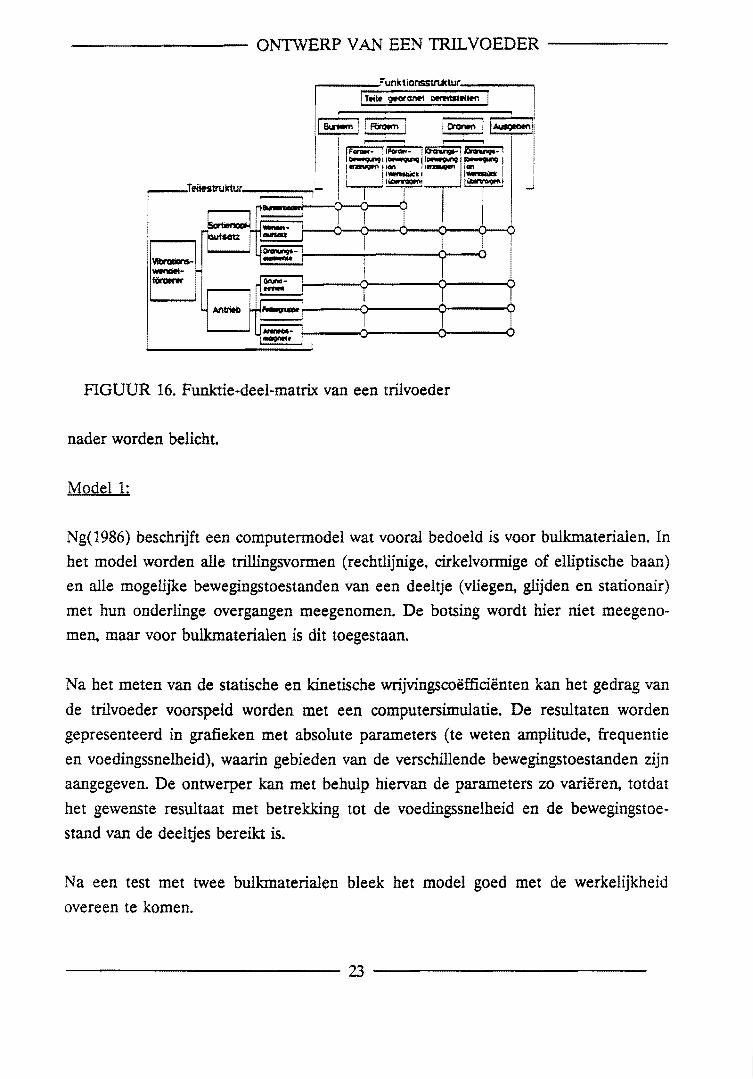
Door de eenvoudige opbouw van de trilvoeder vervullen de verschillende delen
meerdere funkties tegelijk (figuur 16).
Er ontstaat hierdoor een afhankelijkheid tussen de eerder besproken grootheden. Het
heeft dan ook geen zin om een van deze grootheden apart te optimaliseren.
Bij het opstellen van een model voor het ontwerp van een trilvoeder moet deze
afbankelijkheid zeker worden meegenomen. Er zouden daarom zoveel mogelijk
parameters in het model verwerkt moeten worden.
Er zijn verschillende pubHkaties, waarin een poging wordt gedaan om het ontwerp
van een trilvoeder met een model te systematiseren. Daarvan zullen er hier twee
----------------------------------------22 --------------------------
-------- ONTWERP VAN EEN TRILVOEDER -----
FIGUUR 16. Funktie-deel-matrix van een trilvoeder
nader worden belicht.
Modell;
Ng(1986) beschrijft een computermodel wat vooral bedoeld is voor bulkmaterialen. In
het model worden aile trillingsvormen (rechtlijnige, cirkelvormige of elliptische baan)
en alle mogelijke bewegingstoestanden van een deeltje (vliegen, glijden en stationair)
met hun onderlinge overgangen meegenomen. De botsing wordt mer niet meegeno
men, maar voor bulkmaterialen is dit toegestaan.
Na het meten van de statische en kinetische wrijvingscoefficienten kan het gedrag van
de trilvoeder voorspeld worden met een computersimulatie. De resultaten worden
gepresenteerd in grafieken met absolute parameters (te weten amplitude, frequentie
en voedingssneiheid), waarin gebieden van de verschillende bewegingstoestanden zijn
aangegeven. De ontwerper kan met behulp hiervan de parameters zo varieren, totdat
het gewenste resultaat met betrekking tot de voedingssnelheid en de bewegingstoe
stand van de deeltjes bereikt is.
Na een test met twee bulkmaterialen bleek het model goed met de werkelijkheid
overeen te komen.
------------------------------------ 23 ------------------------------------

ONTWERP VAN EEN 1RILVOEDER -----
Model 2:
Ahrens(1983) beeft een procedure bestaande uit elf stappen opgesteld voor bet
systematiscb ontwerpen van een trilvoeder (figuur 17).
Ermittlung der auslt'gungsrl'ieo¥an~ Oaten
Ermittlung del" zulassige-n Wurfzjffer
Rirderleistung QUSI eiI::hend '? -.-.in ----..-I
eeslimmung der Soli - Wurniffer
Endabnahrneo und Ookurnentation
FIGUUR 17. Ontwerpprocedure v~~r een trilvoeder
De procedure verloopt als voIgt:
Van de klant worden alle relevante gegevens voor bet ontwerp verkregen (stap 1).
Als eerste wordt dan een basisoplossing v~~r bet ricbten gekozen (stap 2), aan de
hand waarvan de maximaal toelaatbare werpcoefficient wordt bepaald (stap 3). Na
-------------- 24 --------------

-------- ONTWERP VAN EEN TRILVOEDER -----
bet kiezen van de werphoek (stap 4) kan er al een waarde geschat worden van de maximaal baalbare voedingssnelheid bij de in stap 2 gekozen basisoplossing. Is deze
onvoldoende, dan moet er terug worden gegaan naar stap 1 of 2. Bij de vijfde stap
worden, uitgaande van de gekozen werpboek, straal van de baan en de veerhoek op
elkaar afgestemd. De gewenste werpcoefficient wordt dan bepaald (slap 6) en deze moet natuurlijk kleiner of gelijk zijn aan de toelaatbare. Voor het realiseren van stap
7 moeten er aan aantal basisvoorwaarden worden beschouwd (welke ook worden
gegeven). Voor stap 8 dient eerst de eigenfrequentie van het systeem te worden
bepaald. De aanstootfrequentie wordt dan zo gekozen, dat de gewenste werpcoefficient wordt bereikt en de toelaatbare werpcoefficient ook niet met een lege richtbak
wordt overschreden. Als dit weI het geval is kunnen er een aantal extra maatregelen
(bijvoorbeeld een regelkring) worden getroffen (stap 9). Na het uitwerken van de
ricbtorganen (stap 10) moet het gebeel nog gedocumenteerd worden.
Een uitgebreide omscbrijving van de procedure en een uitgewerkt voorbeeld zijn te vinden in Ahrens( 1983).
Indien deze procedure steeds gevolgd wordt wordt bet ontwerpproces steeds meer
gesystematiseerd en zal de ontwerper steeds meer routine krijgen.
-------------25-------------

4. CONCLUSIES
De invloed van verschillende grootheden afzonderlijk op de voedingssnelheid van een trilvoeder blijkt al uitgebreid bekeken te zijn. Bij het ontwerp moet er echter
rekening worden gehouden met een sterke samenhang tussen deze grootheden.
Verder is met name de invloed van deeltjeseigenschappen nog een punt van onderzoek.
Tijdens het transport van de deeltjes blijkt de botsing een bijzondere toestand te zijn,
waarbij grote versnellingsimpulsen op het deeltje inwerken. Er ontstaat daardoor een wiebelende beweging, welke de eigenlijke transportbeweging overlapt en daarmee een
exacte berekening van de verschillende parameters tegenwerkt. Er is dan ook nog
geen eenduidige ontwerpprocedure voor een trilvoeder opgesteld.
Het zou beter zijn om de micro-worp achterwege te laten, ook uit het oogpunt van
lawaai. Om dan alsnog een acceptabele voedingssnelheid te bereiken zou er gebruik
gemaakt kunnen worden van faseverschuiving of niet-sinusoidale excitatie. Vooral
deze laatste blijft nog een item voor onderzoek.
------------- 26 -------------
LITERATUUR
.Ahrens,H. ,
Grundlagenuntersuchungen zur WerkstackzufUhrung mit Vibrationswendelforderem
und Kritenen zur Gerateauslegung
Fortschritt-Berichte VDI-Zeitschrift, Reihe 13, Nr.23,
1983 .
• Ahrens,H., Habenicht,D.,
Werkstuckbewegung beim zufUhren und ordnen mit Vibrationswendelforderem
Ill: Werkstattstechnik- Zeitschrift fUr industrielle Fertigung 74
1984, Nr.l, pp 23-26 .
• Boothroyd,G., Poli,C., Murch,L.E.,
Automatic Assembly
Marcel Dekker Inc, New York/Basel
1982 .
• Gorbikov,S.P., Neimark,Yu.I.,
Calculated average vibration-transport speeds
in: Mashinovedenie, No.4,
1987, pp 39-42 .
• Habenicht,D.,
Hilfen zur Optimierung von Vibrationswendelforderem;
Berechnungsgrundlagen
Ill: VDI-Zeitschrift 123 (1981)
Nr.3-Februar, pp 82-86 .
• Habenicht,D.,
Hilfen zur Optimierung von Vibrationswendelforderem;
Parametereinfluf3 auf die Forderung
in: VDI-Zeitschrift 123 (1981)
Nr.6-Marz, pp 215-218.
----------------------------- 27 -----------------------------

----------- LlTERATUUR -----------
aHabenicht,D.,
Hilfen zur Optimierung von Vibrationswendelforderem;
Forderarten
in: VDI-Zeitschrift 123 (1981)
Nr.8-April, pp 297·301.
aHabenicht,D.,
Einjluj3 der Topfgeometrie auf die Optimierung von Vibrationswendelforderem
in.:. Zeitschrift wirtschaftlichen Fertigung 76
1981, Nr.12, pp 586-589.
aHabenicht,D.,
Die Gleitforderung von Werkstii.cken in Schwingzufiihrsystemen;
Optimierung der Antriebsparameter
in: Fordern und heben 3,
1985, Nr.2, pp 90-93.
aKaatzsch,U., Geilung,U.,
Fordem mit Auj3envibratoren
m: Mashinenbautechnik, Berlin 34,
1985, Nr.lO, pp461-463.
aKettner,H., Ahrens,H., Stoevesandt,G.W.,
Zum Fordervorgang im Vibrationswendelforderer
m: VDI-Zeitschrift 122 (1980),
Nr.8-April, pp 311-315.
aKonnur, V .S., Parameswaran,M.,
Bewegungsverlauf eines Gutteilchens auf einer ansteigenden sinusvonnlg schwin
genden Forderrinne
in: Fordern und heben 32,
1982, Nr.2, pp 88-96.
-------------- 28 --------------

--------------------- LlTERATUUR ---------------------
.Morrey,D., Mottershead,J .E.,
Modelling of vibratory bowl feeders
m: Proceedings of the Institution of Mechanical Engineers,
1986, vo1.202, No.C6, pp 431-437 .
• Ng,KL, Ang,L.A., Chng,S.C.,
A computer model for vibrating conveyors
in: Proceedings of the Institution of Mechanical Engineers,
1986, vo1.200, No.B2, pp 123-130 .
• Okabe,S., Yokoyama,Y.,
Study on vibratory feeders; Calculation of natural frequency of bowl-type vibratory
feeders
in: Journal of Mechanical Design,
January 1981, vol.103, pp 249-255 .
• Okabe,S., Kamiga,Y., Tsujikado,K., Yokoyama,Y.,
Vibratory feeding by nonsinusoidal vibration-optimal wave fonn
m: Journal of vibration, acoustics, stress and reliability in design,
April 1985, vol.l07, pp 188-195 .
• Povidailo,V.A., Vrublevski,I.I.,
Dynamics of vibrating hopper feeder with axial vibration exciters
in: Mashinovedenie, No.6,
1985, pp 22-25 .
• Schaijk,H.G.C. van,
Onderzoek naar de mogelijkheden van twee-fasen trilvoeders in het gebied van de
voedingssnelheid
Technische Universiteit Eindhoven, rapportnr. WP A-0883,
1990.
---------------------------- 29 ----------------------------

, --------------------- LlTERATUUR ---------------------
.Smals,A.T J.M., Koumans,P.W.,
Trilvoeders
Technische Universiteit Eindhoven, diktaatnr. 4010,
1988 .
• Socha,H., Koltze,K.,
Berechnungsverfahren zur theoretischen Analyse des Bewegungsverhaltens von
Schwingfordersystemen
in.;. Mashinenbautechnik, Berlin 39,
1990, Nr.9, pp 403-407 .
• Srinath,K., Karmakar,R.,
Vibratory conveying by nonsinusoidal excitation
in: Proceedings of the Institution of Mechanical Engineers,
1988, vo1.202, No.C6, pp 405-408.
• Verspille,A.A.,
Vibrating parts in a vibratory feeder
m: Philips produktion means, No.2,
maart 1990.
• Wiendahl,H.P., Habenicht,D.,
Einfluf3 der variabelen Werkstilckmassa auf das Forderverhalten von Vibrations
wendelforderern
in: Zeitschrift wirtschaftlichen Fertigung 76,
1981, Nr.2, pp 65-69.
• Wiendahl,H.P., Ahrens,H.,
Design of vibratory feeders
in: Assembly Automation,
nov. 1984, pp 198-203.
-------------- 30 --------------





























