Embed Size (px)
Citation preview

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 1
Danmarks Tekniske Universitet
Skriftlig prøve, den 28. maj 2018
Kursus navn: Indledende Medicinsk Billedanalyse
Kursusnr: 02511 og 02512
Varighed: 4 timer
Tilladte hjælpemidler: Alle hjælpemidler er tilladt.
Vægtning: Alle opgaver vægtes ligeligt.
Navn:
Underskrift:
Bord nr.:
Opgave 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Svar
Opgave 16 17 18 19 20 21 22 23 24 25
Svar
Svarmulighederne for hvert spørgsmål er nummereret fra 1 til 6. For hvertspørgsmål skal nummeret på den valgte svarmulighed indføres i skemaetovenfor. Indføres et forkert nummer i skemaet kan dette rettes ved at "svær-te"det forkerte nummer over og anføre det rigtige nummer nedenunder. Erder tvivl om meningen med en rettelse, betragtes spørgsmålet som ubesvaret.KUN FORSIDEN SKAL AFLEVERES. A�everes blankt eller forladeseksamen i utide, skal forsiden alligevel a�everes. Kladde, mellemregninger ogbemærkninger tillægges ingen betydning, kun tallene indført ovenfor regi-streres.
Der gives 5 points for et korrekt svar og -1 for et ukorrekt svar. Ubesvaredespørgsmål eller et 6-tal (svarende til "ved ikke") giver 0 points. Det antalpoints, der kræves for, at et sæt anses for tilfredsstillende besvaret, afgøresendeligt ved censureringen af sættene.
HUSK at forsyne opgaveteksten med navn, underskrift og bord nummer.
DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 2
Opgave 18.1
Et 6 x 6 billede fyldes ud med værdier, der er givet ved gray level run length
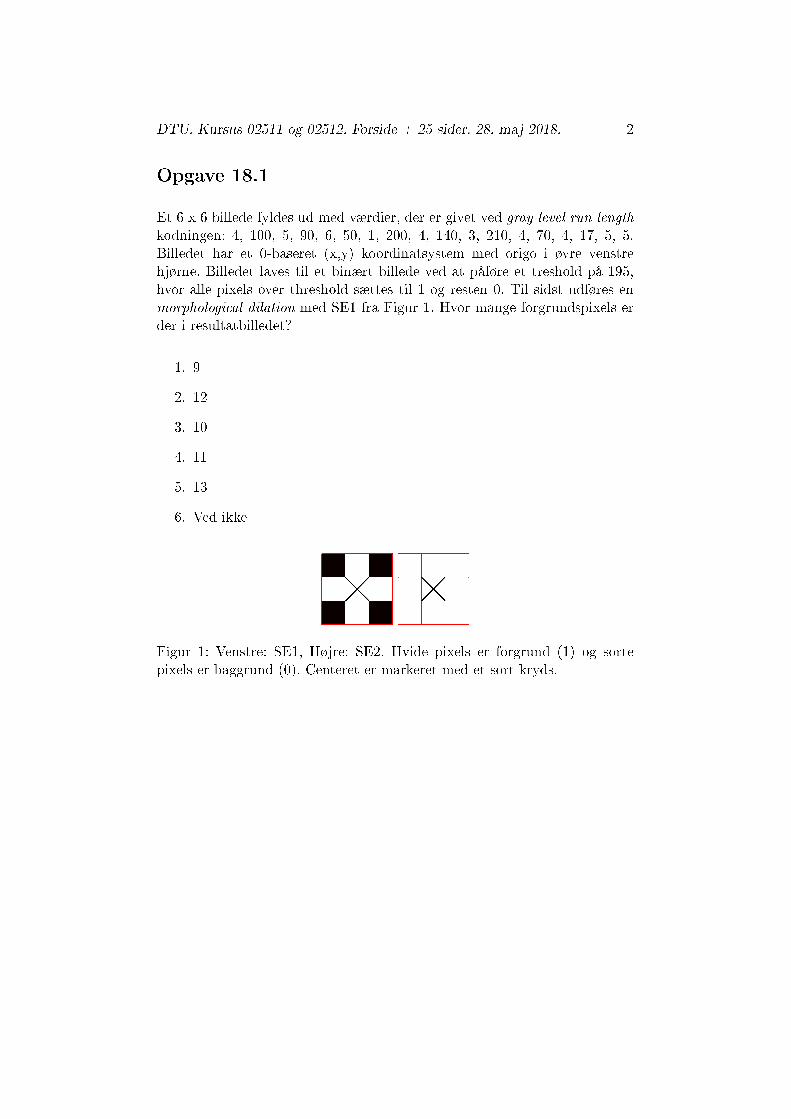
kodningen: 4, 100, 5, 90, 6, 50, 1, 200, 4, 140, 3, 210, 4, 70, 4, 17, 5, 5.Billedet har et 0-baseret (x,y) koordinatsystem med origo i øvre venstrehjørne. Billedet laves til et binært billede ved at påføre et treshold på 195,hvor alle pixels over threshold sættes til 1 og resten 0. Til sidst udføres enmorphological dilation med SE1 fra Figur 1. Hvor mange forgrundspixels erder i resultatbilledet?
1. 9
2. 12
3. 10
4. 11
5. 13
6. Ved ikke
Figur 1: Venstre: SE1, Højre: SE2. Hvide pixels er forgrund (1) og sortepixels er baggrund (0). Centeret er markeret med et sort kryds.

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 3
Opgave 18.2
Punktet (x, y) = (4, 7) transformeres først med transformationsmatricen:
[4 23 5
](1)
og herefter med en rotationsmatrice (der roteres mod uret) med θ = 15◦.Hvad bliver det endelige resultat?
1. (-7.3, 16.4)
2. (32.1, 23.9)
3. (42.3, -3.6)
4. (16.8, 53.2)
5. (76.2, 43.4)
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 4
Opgave 18.3
Et binært billede er kodet med en binary run-length coding. Der benyttes et0-baseret (x,y)-koordinatsystem med origo i øverste venstre hjørne:
[2; (1,2)],[2, (5,6)],[3,(3,3)],[4,(4,4)],[5,(4,4)],[6,(4,4)]
På dette billede udføres en BLOB analyse med 8-connectivity. Hvad er bo-
unding box ratio af den største BLOB?
1. 0.95
2. 0.80
3. 1.10
4. 1.40
5. 1.25
6. Ved ikke
DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 5
Opgave 18.4
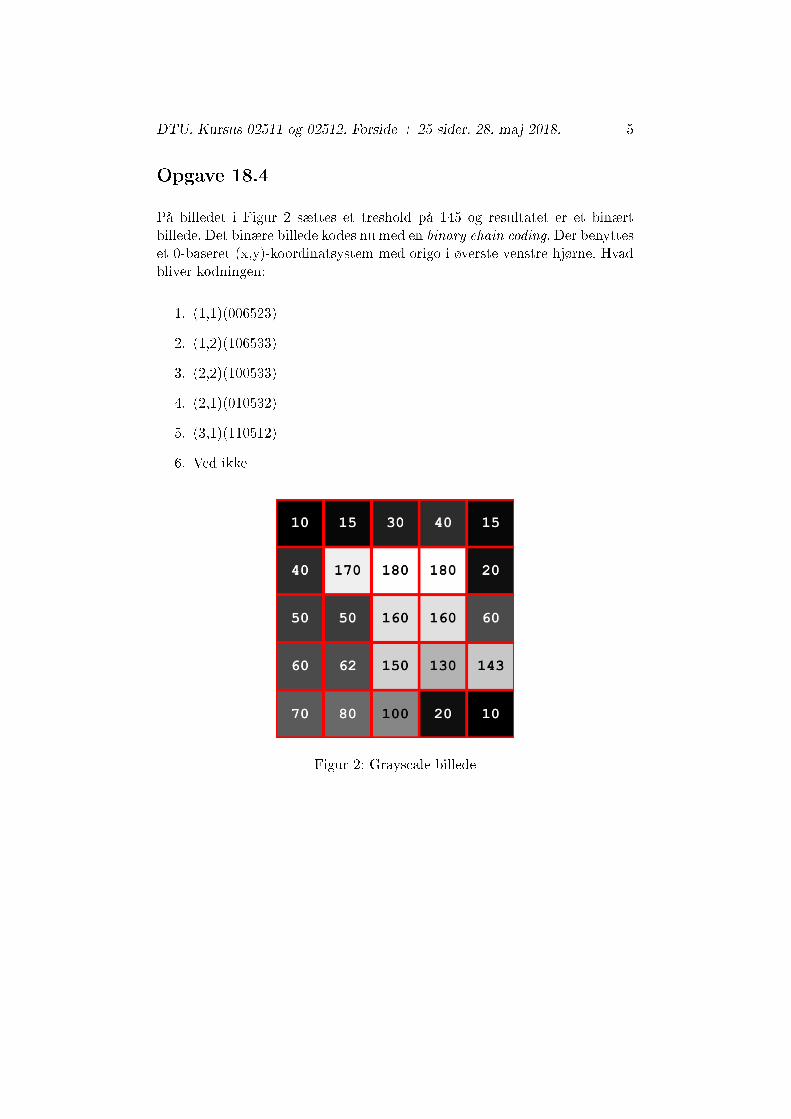
På billedet i Figur 2 sættes et treshold på 145 og resultatet er et binærtbillede. Det binære billede kodes nu med en binary chain coding. Der benytteset 0-baseret (x,y)-koordinatsystem med origo i øverste venstre hjørne. Hvadbliver kodningen:
1. (1,1)(006523)
2. (1,2)(106533)
3. (2,2)(100533)
4. (2,1)(010532)
5. (3,1)(110512)
6. Ved ikke
Figur 2: Grayscale billede

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 6
Opgave 18.5
Du har et kamera med et �eld-of-view på 35◦ både horisontalt og vertikalt.Kameraets focal length er på 20 mm og det kan antages at f = b. Hvad skalhøjden af CCD chippen være for at kunne tage et billede af hele �eld-of-view?
1. 8.2 mm
2. 9.8 mm
3. 13.7 mm
4. 10.1 mm
5. 12.6 mm
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 7
Opgave 18.6
På billedet, der ses i Figur 3, udføres en linear gray level mapping sådanat den nye maksimum værdi i billedet er 220 og den nye minimum værdi ibilledet er 30. Herefter beregnes et optimal path med dynamic programming
fra toppen til bunden af billedet. Hvad bliver den samlede cost for det fundnepath?
1. 170
2. 123
3. 145
4. 176
5. 181
6. Ved ikke
Figur 3: Grayscale billede

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 8
Opgave 18.7
På billedet, der ses i Figur 4, udføres først en �ltrering med et 3x3 minimumrank �lter og herefter en �ltrering med et 3x3 median �lter. Hvad bliverresultatet i den pixel, der er markeret med en cirkel?
1. 3
2. 21
3. 33
4. 67
5. 59
6. Ved ikke
Figur 4: Grayscale billede
DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 9
Opgave 18.8
I et gråtone billede beregnes pixelværdien på positionen (121.6, 237.2) vedat bruge bilinear interpolation. De nærmeste �re pixels og deres værdier er:
x y værdi
121 237 73122 237 108121 238 65122 238 X
Den interpolerede værdi i punktet (121.6, 237.2) er 87.24. Hvad er X:
1. 45
2. 57
3. 61
4. 65
5. 72
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 10
Opgave 18.9
RGB værdierne i billedet, der ses i Figur 5 konverteres til HSI værdier. Hvadbliver S værdierne for den første række af billedet?
1. [0.61, 0.17, 0.52]
2. [0.53, 0.85, 0.43]
3. [0.57, 0.98, 0.34]
4. [0.87, 0.54, 0.73]
5. [0.67, 0.74, 0.70]
6. Ved ikke
Figur 5: RGB Billede

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 11
Opgave 18.10
Der udføres en gamma mapping med γ = 1.16 på billedet, der ses i Figur 6.Alle pixelværdier laves nu til heltal (ved at fjerne decimaler) og herefter�ltreres billedet med et Vertical Sobel �lter. For at undgå the border problem
udvides billedet med værdien 0 (zero padding). Hvad bliver resultatet i denmarkerede pixel?
1. 10
2. -54
3. -73
4. 23
5. 13
6. Ved ikke
Figur 6: Grayscale billede

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 12
Opgave 18.11
Der laves en BLOB analyse på billedet, der ses i Figur 7. Den største BLOB�ndes med 4-connectivity og alle andre BLOBs fjernes. Herefter udføres:
(I⊕ SE1) SE2,
hvor SE1 og SE2 ses i Figur 1. Hvor mange forgrundspixels er der i resultat-billedet?
1. 3
2. 12
3. 7
4. 8
5. 4
6. Ved ikke
Figur 7: Binært billede. Hvide pixels er forgrund (1) og sorte pixels er bag-grund (0).

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 13
Opgave 18.12
Der laves en BLOB analyse på billedet, der ses i Figur 7 med 8-connectivity.For at kunne lave en BLOB classi�cation er der valgt en model der har areal12 og bounding box ratio på 0.75. Der udregnes også areal og bounding box
ratio på de fundne BLOBs og den, der har den mindste Euklidiske afstand ifeature space til modellen vælges. Hvad er afstanden for denne?
1. 1.0
2. 3.2
3. 0.3
4. 4.7
5. 2.3
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 14
Opgave 18.13
Der udføres en template matching med template billedet, der ses i Figur 8(højre) på billedet i Figur 8 (venstre). Først konverteres RGB templatentil gray-scale, hvor værdien i en pixel er farvens luminance (med decimaler).Hvad bliver cross correlation i den pixel, der er markeret med en grøn cirkel?
1. 80428
2. 70120
3. 91200
4. 102033
5. 99210
6. Ved ikke
Figur 8: Venstre: Gray scale image. Højre: Template som RGB

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 15
Opgave 18.14
Der udføres en template matching med template billedet, der ses i Figur 8(højre) på billedet i Figur 8 (venstre). Først konverteres RGB templaten tilgray-scale, hvor værdien i en pixel er farvens luminance (med decimaler).Hvad bliver normalized cross correlation i den pixel, der er markeret med engrøn cirkel?
1. 0.65
2. 0.86
3. 0.91
4. 0.77
5. 0.72
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 16
Opgave 18.15
Du har lavet en algoritme der kan klassi�cere objekter til at være enten celle
eller støj-objekt. Du har kørt din algoritme på et billede, hvor en ekspert harudpeget de rigtige celler og støjobjekter. Den beregnede confusion matrix :
Klassi�ceret som støj Klassi�ceret som celle
Rigtig støj 15 3
Rigtig celle 76
Der er også beregnet en true positive rate på 0.9157.
Hvad er det manglede tal i confusion matrix :
1. 3
2. 11
3. 4
4. 7
5. 14
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 17
Opgave 18.16
For at kunne lave en pixel classi�cation på øjenbilleder har en ekspert udvalgtområder i et billede indeholdende baggrund, hud, øjenbryn, iris, og pupil.Originalbilledets pixelværdier er mellem 0 og 255. De udvalgte pixelværdierses i Tabel 1. Der laves nu enminimum distance classi�cation. Hvad er arealetaf iris i billedet i �gur 9?
1. 10
2. 8
3. 5
4. 7
5. 11
6. Ved ikke
Væv pixelværdier
baggrund 176, 178, 183hud 81, 76, 72iris 67, 68, 70pupil 15, 25, 18
øjenbryn 25, 42, 32
Tabel 1: Pixelværdier i de områder som eksperten valgte.
Figur 9: Grayscale billede

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 18
Opgave 18.17
For at kunne lave en pixel classi�cation på øjenbilleder har en ekspert udvalgtområder i et billede indeholdende baggrund, hud, øjenbryn, iris, og pupil.Originalbilledets pixelværdier er mellem 0 og 255. De udvalgte pixelværdierses i Tabel 2. Der laves nu en parametric classi�cation. Hvad bliver en pixelmed værdien 71 klassi�ceret til?
1. baggrund
2. hud
3. øjenbryn
4. iris
5. pupil
6. Ved ikke
Væv pixelværdier
baggrund 176, 178, 183hud 81, 76, 72iris 67, 68, 70pupil 15, 25, 18
øjenbryn 25, 42, 32
Tabel 2: Pixelværdier i de områder som eksperten valgte.

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 19
Opgave 18.18
På Figur 10 ses det skematisk hvordan røntgenstråling med en startintensitetpå I0 passerer igennem et uhomogent materiale. x1 til x6 er afstande og µ1til µ5 er linear attenuation coe�cients. Hvad bliver røntgenintensiteten i detgrønne punkt?
Figur 10: Røntgenstråling igennem uhomogent materiale.
1. I0 exp(−µ1x6 − µ4x4 − µ5x5 − µ2x2)
2. I0 exp(−µ1x6 − µ5x5 − µ2x2)
3. I0 exp(−µ1x6 − µ2x2 − µ5x5 − µ2x4)
4. I0 exp(−µ1x6 − µ4x4 − µ2x2)
5. I0 exp(−µ1x1 − µ4x2 − µ5x5 − µ2x2)
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 20
Opgave 18.19
Du har et kamera med en CCD chip, der måler 7 mm x 7 mm. Det tagerbilleder der har størrelsen 4200 x 4200 pixels. Det kan antages at b = f . Fraen afstand af 2 meter har du taget et skarpt billede af et 15 cm langt objekt.På billedet er objektet 2000 pixels langt. Hvad er focal length på kameraet?
1. 42 millimeter
2. 44 millimeter
3. 47 millimeter
4. 51 millimeter
5. 53 millimeter
6. Ved ikke
DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 21
Opgave 18.20
Der laves en gråtone pro�l ved at sample i et billede langs en linie, der gårfra punktet (24.2, 43.2) til (253.7, 301.3). Punktet som ligger midt på dennepro�l transformeres nu med matricen:
[0.7 1−3 0.4
](2)
Hvad bliver det endelige koordinat?
1. (269.52, -347.95)
2. (-64.24, 102.31)
3. (-7.21, -23.74)
4. (306.32, 111.77)
5. (156.52, 35.38)
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 22
Opgave 18.21
For at kunne lave en image registration mellem et reference billede og et tem-
plate billede er der blevet sat to sammenhørende landmarks i hvert billede.Landmarks kan ses i den nedenstående tabel.
Landmark i reference x y Landmark i template x y
a1 -1 4 b1 2 3a2 5 -2 b2 5 X
Først beregnes sum of squared distances objective function F til at være 35.Hvad er den manglende koordinat (X)?
1. 5
2. -2
3. 1
4. 4
5. 3
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 23
Opgave 18.22
For at kunne lave en image registration mellem et reference billede og et tem-
plate billede er der blevet sat tre sammenhørende landmarks i hvert billede.Landmarks kan ses i den nedenstående tabel.
Landmark i reference x y Landmark i template x y
a1 3 -1 b1 8 -1a2 5 3 b2 4 2a3 7 -2 b3 1 3
Den optimale translation, der bringer landmarks fra reference billedet over itemplate billedet �ndes og påføres punkterne. Hvad bliver ændringen i sumof squared distances objective function F?
1. 0.11
2. 6.67
3. 2.53
4. 3.24
5. 2.13
6. Ved ikke
DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 24
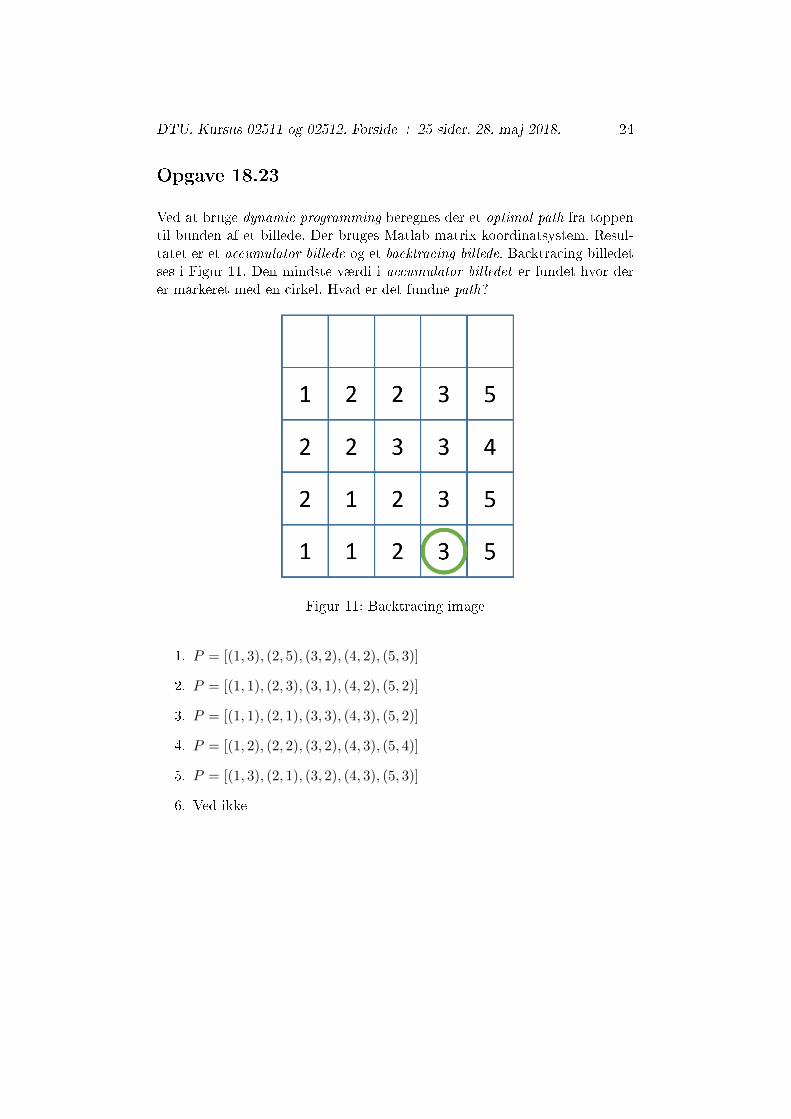
Opgave 18.23
Ved at bruge dynamic programming beregnes der et optimal path fra toppentil bunden af et billede. Der bruges Matlab matrix koordinatsystem. Resul-tatet er et accumulator billede og et backtracing billede. Backtracing billedetses i Figur 11. Den mindste værdi i accumulator billedet er fundet hvor derer markeret med en cirkel. Hvad er det fundne path?
Figur 11: Backtracing image
1. P = [(1, 3), (2, 5), (3, 2), (4, 2), (5, 3)]
2. P = [(1, 1), (2, 3), (3, 1), (4, 2), (5, 2)]
3. P = [(1, 1), (2, 1), (3, 3), (4, 3), (5, 2)]
4. P = [(1, 2), (2, 2), (3, 2), (4, 3), (5, 4)]
5. P = [(1, 3), (2, 1), (3, 2), (4, 3), (5, 3)]
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 25
Opgave 18.24
Ved at bruge dynamic programming beregnes der et optimal path fra toppentil bunden af billedet i Figur 12. Der bruges Matlab matrix koordinatsystem.Hvad bliver værdierne i anden række af accumulater billedet:
Figur 12: Grayscale billede.
1. [258, 380, 222, 157, 95, 175]
2. [234, 310, 232, 145, 85, 143]
3. [256, 342, 242, 161, 76, 154]
4. [223, 313, 218, 143, 81, 152]
5. [274, 393, 225, 169, 99, 179]
6. Ved ikke

DTU. Kursus 02511 og 02512. Forside + 25 sider. 28. maj 2018. 26
Opgave 18.25
Du har lavet en algoritme der kan klassi�cere objekter i to klasser. De toklasser: celle og støjobjekt. På billedet i �gur 13 har en ekspert farvet rigtigeceller grønne og støjobjekter røde. Cellerne der er fundet med din algoritmeses til højre i billedet. Hvad er speci�city af din algoritme?
1. 0.56
2. 0.91
3. 0.83
4. 0.67
5. 0.75
6. Ved ikke
Figur 13: Celle klassi�kation. Til venstre en eksperts vurdering og til højreresultatet fra algoritmen.











![UNITED STATES DISTRICT COURT FOR THE DISTRICT OF … complaint.pdf · Case 1:17-cv-02511 Document 1 Filed 11/20/17 Page 1 of 23; 2 [distributors]” and can “use such threats to](https://img.dokumen.tips/doc/110x75/5f6e0bcf4e5910768f1a3aac/united-states-district-court-for-the-district-of-case-117-cv-02511-document.jpg)

















