-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
1/82
Analysis and Control of a Simple NonlinearLimb Model
by
Dávid Csercsik
Submitted to the department of Control Engineering
andInformation Technology in partial fulfillment of the
requirements
for the degree of
Master of Science in Electrical Engineering
at the
Budapest University of Technology and Economics
Supervisor: Department Consultant:
Prof. Katalin Hangos Dr. István Harmati
Systems and Control Laboratory Department of Control
EngineeringComputer and Automation and Information Technology
Research Institute Budapest Faculty of Control Engineeringand
Informatics
Budapest University of Technologyand Economics
BME2005
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
2/82
Contents
1 Introduction 51.1 Literature review on human locomotion
analysis and control . 51.2 Notation list . . . . . . . . . . . . .
. . . . . . . . . . . . . . . 61.3 Structure of the diploma work .
. . . . . . . . . . . . . . . . . 7
2 Construction of a simple limb model in state-space 82.1 Limb
and muscle modelling . . . . . . . . . . . . . . . . . . . 82.2
System description . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2.1 Modelling assumptions . . . . . . . . . . . . . . . . . .
92.3 Muscle properties . . . . . . . . . . . . . . . . . . . . . .
. . . 10
2.3.1 Force-length characteristics (F L(lCE )) . . . . . .
. . . 102.3.2 Force-contraction velocity characteristics
(F v(vCE )) . . 112.3.3 Passive force (F PE ) .
. . . . . . . . . . . . . . . . . . . 122.3.4 Muscle activation
(q ) . . . . . . . . . . . . . . . . . . 132.3.5 Muscle force
(F CE ) . . . . . . . . . . . . . . . . . . . . 13
2.4 Tendon properties . . . . . . . . . . . . . . . . . . . . .
. . . . 142.4.1 The tendon’s dynamical equations . . . . . . . . .
. . . 14
2.5 Dynamic equations at the limb level . . . . . . . . . . . .
. . . 142.5.1 Forces . . . . . . . . . . . . . . . . . . . . . . .
. . . . 142.5.2 Joint torques . . . . . . . . . . . . . . . . . . .
. . . . 15
2.5.3 Movement . . . . . . . . . . . . . . . . . . . . . . . . .
152.6 State-space model equations and its variables . . . . . . . .
. 17
2.6.1 Variables in the state-space model . . . . . . . . . . . .
172.6.2 State-space equations . . . . . . . . . . . . . . . . . . .
172.6.3 The domain of the model and the model parameters . . 19
2.7 Model verification . . . . . . . . . . . . . . . . . . . . .
. . . . 212.8 A biological extension: A simple Gamma-loop model . .
. . . 24
2.8.1 The simplified model of the Gamma-loop . . . . . . . .
242.8.2 Simulation results . . . . . . . . . . . . . . . . . . . .
. 26
3 Model analysis 283.1 Linear analysis . . . . . . . . . . . . .
. . . . . . . . . . . . . 303.1.1 Linearization around a
steady-state point . . . . . . . . 303.1.2 Analysis of the
linearized model at the first steady-
state point . . . . . . . . . . . . . . . . . . . . . . . . .
313.1.3 Analysis of the linearized model at the second steady-
state point . . . . . . . . . . . . . . . . . . . . . . . . .
333.2 Relative degree . . . . . . . . . . . . . . . . . . . . . . .
. . . 34
3.2.1 The structure graph . . . . . . . . . . . . . . . . . . .
35
1
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
3/82
3.3 Controllability . . . . . . . . . . . . . . . . . . . . . .
. . . . . 36
3.3.1 Algorithm for constructing the controllability
distribu-tion . . . . . . . . . . . . . . . . . . . . . . . . . . .
. 36
3.3.2 Structural controllability and observability . . . . . . .
373.3.3 Structural controllability analysis of the model . . . . .
37
3.4 Observability . . . . . . . . . . . . . . . . . . . . . . .
. . . . 373.4.1 Algorithm for constructing the observability
co-distribution . . . . . . . . . . . . . . . . . . . . . . .
373.4.2 Structural observability analysis of the model . . . . .
38
3.5 Stability . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . 393.5.1 Lyapunov-stability . . . . . . . . . . . . . . .
. . . . . 39
3.5.2 Strong asymptotic -stability . . . . . . . . . . . . . . .
393.5.3 Lyapunov’s first theorem . . . . . . . . . . . . . . . . .
393.5.4 Estimating the stability region in the neighborhood
of the steady-state point with quadratic Lyapunov-function
candidate . . . . . . . . . . . . . . . . . . . . 40
3.6 Zero dynamics . . . . . . . . . . . . . . . . . . . . . . .
. . . . 423.6.1 Zero dynamics state-space equations . . . . . . . .
. . 443.6.2 Computing the zeroing input . . . . . . . . . . . . . .
453.6.3 Zero-dynamics analysis results . . . . . . . . . . . . . .
45
4 Controller design 464.1 Performance specification . . . . . .
. . . . . . . . . . . . . . . 46
4.1.1 Control aims . . . . . . . . . . . . . . . . . . . . . . .
464.1.2 Control domain . . . . . . . . . . . . . . . . . . . . . .
464.1.3 Disturbances . . . . . . . . . . . . . . . . . . . . . . .
46
4.2 Linear SISO LQ regulator . . . . . . . . . . . . . . . . . .
. . 484.2.1 Simulation results of the SISO LQ conroller . . . . . .
50
4.3 Linear MISO LQ regulator . . . . . . . . . . . . . . . . . .
. . 524.3.1 Simulation results of the MISO LQ controller
without
disturbance . . . . . . . . . . . . . . . . . . . . . . . .
524.3.2 Trajectory following results of the MISO LQ controller
with disturbance . . . . . . . . . . . . . . . . . . . . .
544.3.3 Regulation results of the MISO LQ controller with dis-
turbance . . . . . . . . . . . . . . . . . . . . . . . . . .
554.4 Input-Output linearization . . . . . . . . . . . . . . . . .
. . . 56
4.4.1 Simulation results of the IOL-PP controller
withoutdisturbance . . . . . . . . . . . . . . . . . . . . . . . .
58
4.4.2 Trajectory following results of the IOL-PP controllerwith
disturbance . . . . . . . . . . . . . . . . . . . . . 59
2
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
4/82
4.4.3 Regulation results of the IOL-PP controller with dis-
turbance . . . . . . . . . . . . . . . . . . . . . . . . . .
604.5 Fuzzy Inference System . . . . . . . . . . . . . . . . . . .
. . . 61
4.5.1 Basic concepts in fuzzy theory . . . . . . . . . . . . . .
614.5.2 The applied fuzzy controller . . . . . . . . . . . . . . .
664.5.3 Simulation results of the fuzzy controller without dis-
turbance . . . . . . . . . . . . . . . . . . . . . . . . . .
694.5.4 Trajectory following results of the Fuzzy controller
with
disturbance . . . . . . . . . . . . . . . . . . . . . . . .
704.5.5 Regulation results of the Fuzzy controller with distur-
bance . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
4.6 Comparison of the different control methods . . . . . . . .
. . 724.6.1 Comparison of the results without disturbance . . . . .
724.6.2 Comparison of the results with disturbance . . . . . . .
734.6.3 Comparison results: a discussion . . . . . . . . . . . .
74
5 Conclusions and future work 75
6 Acknowledgements 76
7 Appendix 777.1 The gamma-loop . . . . . . . . . . . . . . . .
. . . . . . . . . 77
7.1.1 Muscle spindles . . . . . . . . . . . . . . . . . . . . .
. 777.1.2 The servomechanical Gamma-loop . . . . . . . . . . . .
78
3
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
5/82
Abstract
Motivation and Aim:Even the simplest limb model exhibits
strongly nonlinear dynamic behavior that
calls for applying the results of nonlinear systems and control
theory. The analysisand control of limb models are important in the
fields of designing and control-ling artificial limbs, muscle
prosthesis and in neuro-physiological investigations.The aim of
this study is to investigate the possibility to applying
input-outputlinearization [11] for nonlinear control of a simple
limb model.
Material and Methods:A nonlinear input-affine state-space model
has been developed for a simple one-
joint system with a flexor and an extensor muscle (see
figure 1) which is suitable fornonlinear systems analysis and
control. The model takes the nonlinear propertiesof the
force-length relation and the force-contraction velocity relation
into account.
Exerted forces depend linearly on the activation state of
muscles, and a vis-coelestic tendon is considered following the
principles in [28], [24] and [22]. Thismodel has been extended with
a simple model of the gamma-loop mechanism, butonly the
non-extended model is used for the control studies. The inputs of
themodel are the normalized activation signal of muscles, the
output is the joint angle,and the number of state variables is
8.
As preliminary model analysis we performed stability,
controllability and ob-servability analysis of the linearized model
around steady-state points. Moreover,the relative degree of the
model and the stability of its zero-dynamics [3] werealso
determined. Both regulating and servo controllers were designed for
the sim-ple limb model and were compared to the standard reference
case being an LQ-controller designed for the locally linearized
system. A pole-placement control wasdesigned for the input-output
linearized system, and also a fuzzy controller wasdesigned.
Result:The model was verified against engineering intuition and
proved to be suitable
for controller design purposes. The model analysis showed that
the nonlinear limb
model was controllable and was in the edge of stability because
of the Hamlitonianproperties of the model. The relative degree of
the model is 3 for both of the inputswith a stable zero dynamics.
Therefore input-output linearization was applicableand a 3rd order
linear system was obtained in the new coordinates. A simple
pole-placement controller was designed for this input-output
linearized model. Boththe pole-placement, the fuzzy, and the
reference LQ-controller were suitable forcontrol purposes but the
fuzzy and the LQ-controller were more sensitive to
thedisturbances.
4
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
6/82
1 Introduction
”Human locomotion is a complex movement of a body. For a
successful move-ment, interactions among muscular-skeletal system
and central nervous sys-tem (CNS) are needed. The CNS controls the
movement by sending activation signals to the correct skeletal
muscle at correct moment. The effect of this signal is that
the muscle initiates a movement by exerting force to a
body segment. Even in the case of a simple movement the
contribution of a large number of muscles of different size
and shape is necessary. A common move-ment such as locomotion
require more muscles. With a feedback system that uses
different kind of receptors, the CNS controls the movement. In
healthy
humans all these complex coordinated actions lead unconsciously
to a smooth movement.” [8]The study of human locomotion has
gained more attention recently with
the developement of analytic and computational tools with which
to examineit. A much researched subject within the field today is
the effort to modelhuman motor control systems using control
theoretic methods. Analytic,computational, and experimental studies
of locomotion can produce modelsthat provide further insight into
the design and functioning of human motorcontrol systems, as well
as provide directions for research into diagnostics andtherapies
for muscle- and nerve-related disorders affecting these
systems.
The aim of this work is to investigate the difficulties related
to the con-trol of a such strongly nonlinear system, as a human
limb, and to design acontroller for a simple nonlinear limb model.
For this aim we need a modelsuitable for the mathematical tools of
linear and nonlinear control theoryand system analysis - a
nonlinear state space model.
1.1 Literature review on human locomotion analysisand
control
Several control models exist that take different important
aspects of humanlocomotion control into account, in various cases
of control tasks. The mostrelevant results of recent investigations
on locomotion analysis and controlare listed and summarized in the
following list:
• A multi level control model including timing and
learning was devel-oped by Levine and Loeb [18].
• A study proposed by Levine and Zajac [20] has shown,
that in the caseof the pedaling problem, the control to achieve
maximal accelerationfor a simple skeletal system is bang-bang.
5
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
7/82
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
8/82
Hungarian scientific background of locomotion analysis:
Modelling of limb movement patterns based on neuronal activity
has beendeveloped in Hungary for some years. Differential
neuro-muscular-skeletalstructures have been studied by Laczko et
al. [15, 14, 13] using mathematicalmodels and computer
simulation.
A neuro-mechanical model was developed by Fazekas in [6, 7]. It
takesinto account the one and two-joint muscles. It handles the
force-length andforce-frequency relationship, passive force,
geometric and inertial propertiesof the limb, the maximal isometric
forces and the gravitational effect.
1.3 Structure of the diploma work
The description of the construction method and the derived
equations of the simple limb model can be found in chapter 2.
Chapter 3 describes theanalysis results of the simple limb model.
In chapter 4 the description, andresults of the applied control
methods can be found. Conclusions of the workand possible future
works are summarized in chapter 5.
7
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
9/82
2 Construction of a simple limb model in state-
space
2.1 Limb and muscle modelling
Our aim is to create a model of a simple one-joint system with a
flexor andan extensor muscle (see in figure 1) which is suitable
for nonlinear systemsanalysis and control.
The models of dynamics of a one-joint system with two muscles
containsthe equations of multi-rigid-limb system and the equations
of the dynamicsof muscle contraction. The crucial component of this
system is the model
that generates the exerting muscle forces.
Muscle modelling:Different muscle models exist that focus
different important aspects of
muscle functioning. In some of the models individual muscle
characteristicsare used, and some of the models deal with
generalized muscle characteristicsthat are valid for all muscle.
But most of the existing models deal only witha partial functioning
of the muscle such as a force depending on the musclelength or
muscle geometry or firing rates of nerves etc.
There are some models that deal with the movement pattern
generation
according to the force exertion and neuronal input. For example
Cheng [3]created this kind of model.
A simple nonlinear limb model:In this chapter the model
equations are derived from first engineering (med-
ical) principles based on the detailed model of Fazekas [8],
Zajac [28] and VanSoest [21]. Therefore the equations are
transformed into a state-space modelform.
2.2 System description
A simple two dimensional limb is considered that consists of two
musclesand one joint. The schematic picture of the limb is shown in
figure 1. Theinput of the model consists of the activation signal
or stimuling signal of eachmuscles as a function of time.
Activation signals are normalized, i.e. theirvalues are between
zero and one.
In general case, the output of the model is the joint angle.
8
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
10/82
Figure 1: The system
2.2.1 Modelling assumptions
• Dimension: The model is two dimensional.
• Structure: We model 2 muscles, one joint.
• Segments: The bones are totally rigid.
• Gravity: Gravity appears in the direction -y only.
• Geometry: We do not model the geometry of bones and the
muscle.
• Muscle Properties: The model takes into account only
the followingproperties of the muscle: Force-length dependency,
Force-contractionvelocity dependency, Passive Force. The
characteristics are the same
by the flexor, and the extensor muscle.
• Moment arms: Moment arms are constants.
• Aponeurosis: There is not aponeurosis.
• Pennate effect: We do not deal with the pennate
effect.
• Tendon: We suppose viscoelastic tendon.
9
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
11/82
• Fatigue: In general case, we do not model fatigue,
potentialization and
short time histories in the muscles.
• Activation dynamics: We use first-order activation
dynamics model.
• Viscosity: We do not model viscosity in the muscle.
2.3 Muscle properties
To construct a state-space limb model, at first we need to
examine the proper-ties of its components (muscles, tendon, etc).
We start with the mathematicalequations describing the behaviour of
the muscles.
2.3.1 Force-length characteristics (F L(lCE ))
The equation describes the quotient of the actual force, and the
maximalforce of the muscle, at given length (lCE ). We use a
parabolic function:
F L(lCE ) = c
lCE
loptCE
2− 2c
lCE
loptCE
+ c + 1 (1)
where lCE [m] is the actual length of the
muscle, loptCE [m] is the optimal length
of the muscle, at which it can produce it’s maximal force. The
coefficient c
is defined by: c = − 1
ω2 where ω is a constant, describing the range
of length,where the muscle is able to work. As Soest [22], we
define ω = 0.56 .
The equation (1) is only valid in the range of 1 − ω ≤
lCEloptCE
≤ 1 + ω
outside this range FL is 0. We can see the characteristics in
figure 2.
0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
lCE
F /
F m a x
Figure 2: F L(lCE )
10
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
12/82
2.3.2 Force-contraction velocity characteristics
(F v(vCE ))
The force produced by a muscle depends on its actual contraction
velocity.We use a similar function to Hill’equation [10], extended
by Van Soest [21]that is:
F v(vCE ) =
(1+Aref )Bref vCE
loptCE
+Bref − Aref if vCE
> 0
c1−vCE
loptCE
−c3− c2 otherwise
(2)
where
c1 = −Bref (1−F asy)2
2+2Aref , c2 = −F asy, c3 =
Bref (1−F asy)2+2Aref
Furthermore, vCE is the actual contraction
velocity of the muscle (posi-tive, if the muscle is contracting,
and negative if the muscle is
extracting),Aref and Bref are
constants, F asy is a constant, which shows at
excentric con-traction the quotient of the actual available force,
and the maximal isometricforce.
This function is not continously differentiable, so to avoid the
problems,we use an approximating smooth function that fits to the
requirements of nonlinear analysis (the parameters of the
function were found in experimental
ways):
F v(vCE ) = −3/2 arctan(9/5
vCE − 925
)π−1 + 167200
(3)
The original and the approximated functions are shown in figure
3.
−3 −2 −1 0 1 2 30
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
vCE
[m/s]
F / F
m a x
equation of Hillaxpproximation
Figure 3: F v(vCE ) and its approximation
11
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
13/82
2.3.3 Passive force (F PE )
For describing the passive force F PE as a
function of lCE we use modifiedsigmoid
functions for both the flexor and extensor muscles:
F PE = (1 − sigm[7(−lCE +
0.3333)]10)F maxPE (4)
where the function identifier ’sigm’ stands for the
function:
y = sigm[x] = 11+e−100x
with F maxPE being the maximal passive
force. We denote the flexor muscle’s
passive force by F PE 1 and the extensor
muscle’s passive force by F PE 2.
1.04 1.06 1.08 1.1 1.12 1.14 1.160
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
lCE
/lCE
opt
F P E
/ F P E m a x
Figure 4: The function F PE
12
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
14/82
2.3.4 Muscle activation (q )
The differential equation of the muscle shows the connection
between q (t), theactivation state of the muscle and the
activation signal u(t). With u(t) ∈ [0, 1]the
equation taken from Zajac [28] is:
dq
dt = −
1
τ act(β + [1 − β ]u(t)
q +
1
τ actu(t) (5)
where τ act [s] is the activation time, showing
how quick the muscle reacts onthe external activation signal coming
from the nerval system. β is a
constant,describing the correlation between the decrease of the
activation state andthe external activation signal.
If β = 1 then the external activation
signaldoes not affect the decrease of the activation state,
if β = 0 then it stronglyaffects it.
q 1(t) denotes the activation state of the flexor muscle, and
q 2(t)denotes the activation state of the extensor
muscle.
2.3.5 Muscle force (F CE )
We can compute the force of the muscle with the characteristics
above in thefollowing form:
F CE = F maxF
L(lCE )F v(vCE )q + F PE
(6)
where F max is the maximal force of the
muscle. We use F CE 1 for the flexormuscle’s
force and F CE 2 for the extensor muscle’s
force.
F CE 1 = F maxF
L(lCE 1)F v(vCE 1)q 1 + F PE 1
F CE 2 = F maxF
L(lCE 2)F v(vCE 2)q 2 + F PE 2
(7)
where q 1 is the flexor muscle’s activation state
q 2 is the extensor muscle’s acti-vation
state, lCE 1 [m] is the length of the flexor
muscle, lCE 2 [m] is the lengthof the extensor
muscle, vCE 1 [m/s] is the contraction velocity
of the flexor
muscle and vCE 2 [m/s] is the contraction
velocity of the extensor muscle.
13
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
15/82
2.4 Tendon properties
2.4.1 The tendon’s dynamical equations
We need tendons to transport the force from the muscles to the
bones. Wedescribe the tendon’s behaviour with the following
equations:
∂lT ∂t
= vT ∂vT ∂t
= −kt(lT −l
slackt )+sT vT −F T
zT
(8)
where the first equation is valid only,
if lT > lslackT .
lT [m] is the actual length
of the tendon, lslackT [m] is the tendon’s
length in the case, when forces do
not appear. vT [m/s] is the extracting
velocity of the tendon (it is positive,if the tendon extracts),
kT [N/m] is the elasticity constant of the
tendon,sT [Ns/m] and z T
[Ns
2/m] are constants referring to the dynamics of thetendon,
F T [N] is the force acting on the
tendon.
2.5 Dynamic equations at the limb level
2.5.1 Forces
Besides the force of the muscle, we use a sigmoid function for
modelling theforces of ligaments and bones in the end-positions of
the joint. These func-
tions are sigmoid in both of the angle of the joint and in the
angle velocityto take unelastic properties (the properties making
the joint available to dis-sipate motion energy) of the joint into
account. The equation for describingthe forces of the ligaments is
as follows:
F lig = F maxlig sigm[0.3(α −
ρ)]sigm[0.5ω] (9)
where α [rad] is the external joint angle,
F maxlig [N ] is the maximum force
of the ligaments and bones, ρ [rad] is a constant,
describing at which angle theforce appears and ω
[rad/s] is the joint angle velocity. We use F lig1
for theforce, which appears at 0 angle, when the limb can
not be more extended (at
the maximum length of the flexor muscle), so it wants to flex
the limb, andF lig2 for the extensor ligamental
force.
The flexing forces can be computed as:
F flexor = F CE 1 + F lig1
(10)
The extending forces can be computed as:
F extensor
= F CE 2 + F lig2
(11)
14
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
16/82
We suppose, for the sake of simplicity, that the forces of the
ligaments
and bones appear at the same point as the forces of the
muscle.Furthermore, apart from the most extended and most flexed
states, we
can neglect the forces of ligaments (and in some cases the
passive force too),to further simplify the model for symbolic
analysis.
In this model the force of the tendon is of the same size as the
force of themuscle and ligaments, it just appears in the opposite
direction. For example:F T 1 = −F flexor
where F T 1 [N] is the tendon’s
force.
2.5.2 Joint torques
The movement is determined not directly by the forces conveyed
by thetendon, but by their torques. For example the flexor tendon’s
torque can bewritten as:
M 1 = −F T 1d =
F flexord (12)
where d [m] is the moment arm, the distance between
the axis of the joint,and the point, where the forces appear.The
resultant joint torque can be computed as:
M = M 1 − M 2 (13)
2.5.3 Movement
Now we know how the forces are generated, and transported to the
bones.Let us then examine how the limb moves. We use the form of
Newton’s IIlaw applied to rotation movement as follows:
∂α∂t
= ω
∂ω∂t
= 1Θ+ml2
COM
(M + mlCOM cos(α + ξ )gy)(14)
where α [rad] is the joint angle,
ξ [rad] is the angle between the
globalcoordinate-system’s x axis, and the not-moving
upper segment of the limb(in our model ξ is
always equal to −π/2), ω [rad/s] is the angle
velocity, Θ[kgm2] is the moment of inertia defined to the
mass-centre point of the bone,m [kg] is the mass of the moving
limb part, lCOM [m] is the distance betweenthe
moving limb part’s center of mass point and the joint axis,
M [Nm] is theresulting joint torque, and g
= [gx, gy] [m/s
2] is the vector of gravitationalacceleration.
15
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
17/82
What’s left, is to define the connection between the joint
angle, and
the muscle length. For the limb the actuator system does not
matter, soat the level of the segments we talk about muscle-tendon
complexes. So,what we can directly compute from the joint angle, is
the length of thesemuscle-tendon complexes. We will denote these
muscle-tendon complexeswith
CE + T in the subscript. We can
compute the length of the muscle-tendon complexes approximately
with the following equations:
In the case of flexor muscle:
lCE +T = d2 + (d prox)2 −
2dd proxsinα(t)
2
+ d2 + (ddist)2 − 2dddistsinα(t)
2(15)
In the case of extensor muscle:
lCE +T =
d2 + (d prox)2 + 2dd proxsin
α(t)
2 +
d2 + (ddist)2 + 2dddistsin
α(t)
2(16)
where lCE +T [m] is the length of the
muscle-tendon complex, d [m] is themoment arm,
d prox [m] is the distance between the joint, and the
origin of
the muscle, ddist
[m] is the distance between the joint, and the insertion
of the muscle, α [rad]is the joint angle. The
extracting velocity of the muscle-tendon complex can be computed
as:
vCE +T = dlCE +T
dt (17)
From these values we can compute the length, and contraction
velocityof the muscles, if we know the length and extraction
velocity of the tendons.Both for flexor and extensor muscles:
lCE (t) = lCE +T (t) − lT (t)
vCE (t) = vCE +T (t)
+ vT (t)(18)
16
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
18/82
2.6 State-space model equations and its variables
2.6.1 Variables in the state-space model
We have the following state variables:
• Joint angle: α [rad]
• Joint angle velocity ω [rad/s]
• Muscle activation state (for flexor and extensor
muscle): q 1, q 2
• Tendon length (of the flexor and the extensor muscle):
lT 1, lT 2 [m]
• Tendon extracting velocity (for flexor and extensor
muscle): vT 1, vT 2[m/s]
So we get: x = [q 1 q 2 α ω
lT 1 lT 2 vT 1
vT 2]T
We have the following input variables:
• Flexor muscle’s activation signal: u1(t)
• Extensor muscle’s activation signal: u2(t)
The output of the model is the joint angle: y=α=x3
2.6.2 State-space equations
dq1dt
= − 1τ act
(β + [1 − β ]u1(t))
q 1 + 1τ act
u1(t)
dq2dt
= − 1τ act
(β + [1 − β ]u2(t))
q 2 + 1τ act
u2(t)
dαdt
= ω
dωdt
= 1Θ+ml2
COM
(M (q 1, q 2, α , ω , lT 1, lT 2,
vT 1, vT 2)
+ mlCOM cos(α + ξ )gy)
dlT 1dt
= vT 1
dlT 2dt
= vT 2
dvT 1dt
= −kt(lT 1−lslackt
)+sT lT 1−F flexor(q1,α,ω,lT 1,vT 1)
zT
dvT 2dt
= −kt(lT 2−l
slackt
)+sT vT 2−F extensor(q2,α,ω,lT 2,vT 2)
zT
(19)
17
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
19/82
With the notation of x1,x2...,x8 for state
space variables the equations
are as follows:
dx1dt
= − 1τ act
(β + [1 − β ]u1(t))
x1 + 1τ act
u1(t)
dx2dt
= − 1τ act
(β + [1 − β ]u2(t))
x2 + 1τ act
u2(t)
dx3dt
= x4
dx4dt
= 1Θ+ml2
COM
(M (x1, x2, x3, x4, x5, x6, x7, x8)
+ mlCOM cos(x3 + ξ )gy)
dx5dt
= x7
dx6dt
= x8
dx7dt
= −kt(x5−lslackt
)+sT x7−F flexor(x1,x3,x4,x5,x7)
zT
dx8dt
= −kt(x6−lslackt
)+sT x8−F flexor(x2,x3,x4,x6,x8)
zT
(20)
y = x3
18
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
20/82
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
21/82
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
22/82
2.7 Model verification
The model verification has been performed by simulation where
the modelresponse has been tested against engineering intuition.
The following testcase was used: The activation signal of the
flexor muscle was equal to 1 fromt=0 to t=0.5, 0 from t=0.5 to t=1,
0.5 from t=1 to t=1.5 and 0.6 from t=1.5to t=2. The extensor
muscle’s activation signal was equal to 0 from t=0 tot=0.5, 1 from
t=0.5 to t=1, 0.5 from t=1 to t=1.5 and 0.1 from t=1.5 tot=2, as it
can be seen in the following figure.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
0.6
0.8
1
1.2u
1u
2
Figure 5: The muscle activation signals
The muscle activation states are shown in figure 6, as functions
of time(q 1 is the flexor muscle’s activation,
q 2 is the extensor’s):
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1q1,q2
t [s]
q 1 , q
2
q1q2
Figure 6: The muscle activation states
21
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
23/82
Figure 7 shows α and ω as functions of
time:
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−30
−25
−20
−15
−10
−5
0
5
10
15alpha,omega
t [s]
a l p h a [ r a d ] , o m e g a [ r a d / s ]
alphaomega
Figure 7: α and ω
The length of the tendons - lT 1 (the flexor
muscle’s tendon) and lT 2 (the
extensor muscle’s tendon) - are depicted in figure 8:
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.1
0.101
0.102
0.103
0.104
0.105
0.106
0.107
0.108
0.109l1,l2
t [s]
l 1 [ m ] , l 2 [ m ]
l1l2
Figure 8: The length of the tendons
The length of the muscles are seen in figure 9 with
lCE 1 being the flexormuscle’s length and
lCE 2 being the extensor muscle’s length:
22
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
24/82
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5lCEf,lCEe
t [s]
l C E f [ m ] , l C E e [ m ]
lCEf
lCEe
Figure 9: The length of the muscles
In figures 7 and 8 we can clearly see the strong forces of the
ligamentsappearing at the maximal flexed/extended states.
Taking into account the aim of the model construction, the
simplifica-tions used in the construction process and the
simulation results, the modelbehaves as one expects, thus the model
is verified and is acceptable for con-troller design purposes.
23
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
25/82
2.8 A biological extension: A simple Gamma-loop model
The γ -loop is a well known solution in human and
other species for someproblems emerging in muscle actuation. The
short description of the mech-anism, and its componetents can be
found in the appendix. (see more in[23])
Figure 10: The servomechanical γ -loop as depicted in
[23]
2.8.1 The simplified model of the Gamma-loop
Simplifying assumptions
• The receptors of the muscle spindles can sense only the
length differ-ence between the muscle fibers inside the muscle
spindles ls, and thesurrounding muscle fibers, of which
length are commensurable to theworking muscle length
lCE .
• The activation signal of the spinal neurons is linear in
the signal of themuscle spindles’s detector.
24
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
26/82
• In this case, there’s no other input to the system,
only the muscle
spindle’s activation signals.
In this case, we can extend our model with two more state-space
variables:With the lengths of the muscle fibers of the muscle
spindles (ls1 in the caseof the flexor muscle, and ls2
in the case of the extensor muscle).
If we suppose, that the normal length of the muscle spindles
(and thesurrounding muscle fibers) is always one tenth of the
working muscle, we candescribe the behavior of the new variables
with the following equations:
dls1
dt = cP (lCE 1/10 − ls1) −
cGus1(t)dls2dt
= cP (lCE 1/10 − ls2) − cGus2(t) (21)
where cP [1/s] is a constant showing how quick
the length of the muscle spin-dles (and the muscle fibers inside
the muscle spindles) follows the length of the working muscle
(lCE 1, lCE 2), cG is a constant
showing how sensitive themuscle spindle is to the external
activation signal of the descending tracts,and us(t) is the
activation signal of the descending tracts acting on the themuscle
fibers inside the muscle spindles. If we consider the normalized
valuesof lCE 1/10 − ls1 and
lCE 2/10 − ls2 as the signals of the muscle
spindles’s recep-tors we can compute the activation states of the
working muscles (denotedwith q 1 and
q 2 in the equation (20)):
q 1 = cG(lCE 1/10 − ls1)
q 2 = cG(lCE 2/10 − ls2) (22)
25
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
27/82
2.8.2 Simulation results
We act on the flexor muscle’s spindle with the following
activation signal:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
t [s]
u f
Figure 11: the activation signal of the flexor muscle’s
spindle
We can see the muscle lengths, and the length of the muscle
spindles(multiplied with 10 for the better comparability) in the
next figure:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
t [s]
l e n g t h s [ m ]
lCE1
,lCE2
,10ls1
,10ls2
lCE1
lCE2
10ls1
10ls2
Figure 12: the length of the muscles and the muscle spindles
26
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
28/82
In the next two figures, we can see the working muscles’s
activity states
(q 1 and q 2) the angle, and the angle
velocity of the joint:
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9q1,q2
t [s]
q 2 , q
2
q1q2
Figure 13: the activation state of the working muscles
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−3
−2
−1
0
1
2
3
4alfa,w
t [s]
a l f a [ r a d ] , w
[ r a d / s ]
Figure 14: joint angle and velocity
We can see, that in the beginning as the joint angle decreases
the flexormuscle begins to extract. The flexor muscle’s spindle
follows the extractionwith a little delay, so it generates a little
activity in the flexor muscle - andso a little force, slowing down
the decreasing of the joint angle a bit. As theactivation signal’s
impulse reaches the flexor muscle’s spindle, it
contracts,generating a big activation state growing in the flexor
muscle, that increasesthe joint angle.
We can see, that in general case, the γ -loop
mechanism prevents the jointfrom sudden movements, providing more
smooth movement of the limb.
Furthermore, the mechanism increases the relative
degree (see later) of the system.
27
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
29/82
3 Model analysis
The aim of the model analysis is to determine the dynamic
properties, thatinfluence the controller design (stability
controllability, observability, zerodynamics etc.).
Let us write the state-space model in the following input affine
form, thatcan be obtained from equation (20):
ẋ = f (x) +m
i=1 gi(x)ui(t)
y = h(x)(23)
where:
f (x) =
− 1τ act
βx1
− 1τ act
βx2
x4
1Θ+ml2com
(M (x1, x2, x3, x4, x5, x6, x7, x8)
+ mlcomcos(x3)gy
x7
x8
−kT (x5−l
slackT
)+sT x7−F flextor(x1,x3,x4,x5,x7)
zT
−kT (x6−l
slackT
)+sT x8−F flextor(x2,x3,x4,x6,x8)
zT
28
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
30/82
g1(x) =
− 1tauact (1 − β )x1 + 1tauact
0
0
0
0
0
0
0
g2(x) =
0
− 1tauact
(1 − β )x2 + 1tauact
0
0
0
0
0
0
0
h(x) = x3
We can observe, that the state function f is
nonlinear, but both the inputfunctions g1 and g2
and the output function h are linear.
29
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
31/82
3.1 Linear analysis
The well-known standard methods of linear analysis can only be
applied forlinear time-invariant (LTI) systems with the following
state-space model:
ẋ = Ax + Buy = C x
(24)
3.1.1 Linearization around a steady-state point
We call x0(u0) a steady-state point of the system,
if
ẋ = f (x)|x0 +
mi=1
gi(x)ui(t)|u0 = 0
From the input-affine state space model in equation (23) we can
obtain a LTImodel by linearizing it locally around a steady-state
point x0(u0), as in [2].
Let us take the centered variables:
x̃ = x − x0 ũ = u − u0
To obtain the LTI model form:
˙̃x = Ãx̃ + B̃ũ
ỹ = C̃ ̃x (25)
we can compute the matrixes Ã, B̃ and
C̃ in the neighborhood of the steady-state point
(x0, u0) in the following way:
à =
J (f,x)|x(0) + J (g,x)|x(0)u(0)
B̃ = g(x0)
C̃ = J (h,x)|x(0)
(26)
where J (v,x) is the Jacobian-matrix of the
multivariate function v:
J (v,x) j,i =
∂v j∂xi
30
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
32/82
Two steady-state points were selected for linear analysis
purposes:
• The most extended steady-state of the limb (very low
effect of gravity)- both of the muscles are totally inactive.
• π/2 joint angle (no effects of ligaments and passive
force)
3.1.2 Analysis of the linearized model at the first
steady-statepoint
Equation (27) contains the state matrix à in the
first steady state point:
à = 104∗
−0.0042 0 0 0 0 0 0 00 −0.0042 0 0 0 0 0 00 0 0 0.0001 0
0 0 0
0.0112 −0.0102 −0.0047 −0.0004
−0.000 0.000 0 00 0 0 0 0 0 0.0001 00 0 0 0 0 0 0 0.0001
0.052 0 −0.0004 −0.0002 −1.25 0
−1.25 00 0.0048 0.000 0.000 0 −1.25 0 −1.25
(27)The rank of A is 8.We obtain the following
results at the steady-space point in the neigh-
borhood of the most extended state of the limb:Steady-state
conditions (in case of u1 = u2 = 0):
x1,0 = 0x2,0 = 0x3,0 ≃ 0.004516x4,0 =
0x5,0 ≃ 0.1
x6,0 = 0.1x7,0 = 0x8,0 = 0
(28)
The à martix’s eigenvalues are the following:
31
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
33/82
103
−1.245−0.005−0.0022 + 0.0065i−0.0022 −
0.0065i−1.2450−0.005−0.0417−0.0417
(29)
If the eigenvalues of the state-matrix à have
negative real part, then thelinear system is stable, and this is
the case in the first steady-state point.
Next we analyze the controllability and observability
testmatrices, con-structed from the Ã, B̃ and
C̃ matrices of the linearized system - see
[17].
In the first steady-state point:
B̃ =
65.7255 00 83.3330 00 0
0 00 00 00 0
, C̃ = [0 0 1 0 0 0 0 0]
Controllability testmatrix:
M c = [B AB......An−1B] (30)
If the rank of the controllability testmatrix is equal to
n (the number of
states) the system is state-controllable, which means also
output controlla-bility in our case.
Observability testmatrix:
M 0 =
C CA
...CAn−1
(31)
32
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
34/82
If the rank of the observability testmatrix is equal to
n (the number of states)the system is observable.
The results of the analysis in the first steady-state point is
as follows::
• The linearized system is stable.
• The linearized system is controllable.
• The linearized system is observable.
3.1.3 Analysis of the linearized model at the second
steady-statepoint
We can find an another steady state-point at π/2 joint
angle with the follow-ing steady-state conditions (of course, in
this case the flexor muscle is active- we take a case, when only
the flexor muscle is active - u1 = 0.0554 - andthe
extensor muscle is totally inactive - u2 = 0):
x1(0) = 0.1050x2(0) = 0x3(0) = π/2
x4(0) = 0x5(0) = 0.101439x6(0) = 0.1x7(0) = 0x8(0) = 0
(32)
In this point:
à = 104∗
−0.0052 0 0 0 0 0 0 00 −0.0042 0 0 0 0 0 00 0 0 0.0001 0
0 0 0
0.0095 −0.0083 −0.0009 0.000 −0.0206 0.000
−0.0037 00 0 0 0 0 0 0.0001 00 0 0 0 0 0 0 0.0001
0.0045 0 −0.0004 0.000 −1.2597 0 −0.1267 00
0.0039 0.000 0.000 0 −1.2500 0 −0.1250
(33)
The rank of the matrix à in this case is 8.
33
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
35/82
The eigenvalues are as follows:
103
−1.25700.0000 + 0.0030i0.0000 −
0.0030i−0.0100−1.2399−0.0101−0.0520−0.0420
(34)
˜B,
˜C are the same as above, and
M C , M O are computed the same way.
Theresults of the analysis in the second steady-state point is as
follows:
• The linearized system is at the edge of stability(it has
a pole-pair with 0 real-part)
• The linearized system is controllable
• The linearized system is observable
3.2 Relative degree
The SISO (single input, single output) nonlinear system
ẋ = f (x) + g(x)u
y = h(x) (35)
has relative degree r at a point x0
if
1. LgLkf h(x) = 0 for all x in a
neigborhood of x
0 and all k > r − 1
2. LgLr−1f h(x
0) = 0
where Lgh(x) = dh(x)
dx g(x) is the Lie-derivative of h(x) along
g. Instead of
performing the Lie-derivatives we can easily determine the
relative degreeof a system, using graph-theoretic methods
[2]. We have to determine thelength of the shortest directed path
from the input to the output vertex inthe structure graph (see
below) , and this length -1 is the relative
degree of the system.
34
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
36/82
3.2.1 The structure graph
The structure graph of a system is constructed in the following
way:
• The vertices of the graph are the state-variables, the
input variables,and the output variables.
• A directed path leads form the vertex V 1
to the vertex V 2 if and only if the
variable V 2 depends on V 1
(If V 2 is a state-variable, this means
thatV 1 can be found in the state-equation describing
the time derivative of V 2. An output variable depends on
a state variable if and only if thestate variable can be found in
it’s output equation).
Figure 15 shows the structure graph of our simple limb model.In
our case the length of the shortest directed path from u1
(or form u2)
to y is 4, therefore the relative degree of the
system is 3.
Figure 15: The structure graph
35
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
37/82
3.3 Controllability
In general case we study the controllability of the original
nonlinear state-space model (see in equation (20)) with the tool of
the controllability distri-bution (∆c) (see [11]).
3.3.1 Algorithm for constructing the controllability
distribution
1. Starting point
∆0 = span{g1, g2} (36)
2. Development of the controllability
distribution
∆k = ∆k−1 m
i=0
[gi, ∆k−1] (37)
where:[gi, ∆k−1] = span{[gi, φ1], ..., [gi, φl]}
where φ1...φl are the vectors spanning ∆k−1, and
[f, g] denotes the Lie-product of f and
g :
[f, g](x) = ∂g(x)∂x
f (x) − ∂f (x)∂x
g(x)
∂g(x)∂x
is the Jacobian matrix of the
function g with respect to its independentvariable
x .
3. Stopping condition
If ∆k = ∆k−1, then ∆c = ∆k
If the dimension of the controllability distribution is equal to
n (the numberof states), then the system is
controllable.
In our case the symbolic expressions needed for computing of the
con-trollability distribution are so complex, that it is impossible
to determinethe Lie-brackets with the available methods, so we use
another method forcontrollability analysis.
36
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
38/82
3.3.2 Structural controllability and observability
Structural controllability and observability [2] apply for a set
of systems withthe same structure, i.e. with the same structure
graph.
A set of linear or linearized systems with structure matrixes
([ A ],[ B ],[ C ])is
structurally controllable or observable if
• The matrix [ A ] is of full structural rank
(maximal possible rank within the class specified by the
structure matrix)
• The system structure graph S is input connectable or
output connectable.For controllability there should be at least one
directed path from any of
the input variables to each of the state variables. For
observability there should be at least one directed path from
each of the state variables toone of the state variables.
Structural controllability implies that the points where the
system is notcontrollable are forming a set with 0 measure.
3.3.3 Structural controllability analysis of the model
Because the rank of the matrix à of the linearized
system is 8 in both in-vestigated steady-state points, it’s
structural rank is 8. We can apply the
structural controllability method for the entire set of the
locally linearizedsystems.We can see in figure 15 , that we can
find directed paths from the inputs
to the states, so the system is structurally controllable. This
is in a goodagreement with the results of the linear
controllability analysis (see section3.1).
3.4 Observability
3.4.1 Algorithm for constructing the
observabilityco-distribution
Similarly to the controllability-analysis, in the general case
we study the ob-servability of the model with the observability
co-distribution Ωo.
1. Starting point
Ω0 = span{g1, g2} (38)
2. Development of the observability
co-distribution
37
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
39/82
Ωk = Ωk−1 m
i=0
LgiΩk−1 (39)
where: LgiΩk−1 is the Lie-derivative of Ωk−1
along gi, and the expansion tothe spanned sub-space is
the same as above.
3. Stopping condition If Ωk = Ωk−1, then Ωo
= Ωk
If the dimension of the controllability distribution is equal to
n (the numberof states), the system is
controllable.
3.4.2 Structural observability analysis of the model
Similarly to the controllability, we study structural
observability. In figure15 we can find directed paths from the
states to the output, so the system isstructurally observable. This
is in a good agreement with the results of thelinear observability
analysis (see section 3.1)
38
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
40/82
3.5 Stability
We can easily determine the stability of a linear system, by
analyzing itseigenvalues as in section 2.1. In the nonlinear case,
we use the Lyapunov-theory.
3.5.1 Lyapunov-stability
definiton:If ξ (t) is a solution of the
differential equation ẋ = f (x, t), we say
that
the solution ξ (t) is a Lyapunov stable solution, if
for ∀ t0 ∈ [a, ∞) and for∀ ε
> 0 ∃ δ (ε, t0) > 0, that
if x(t) is a solution and
x(t0) − ξ (t0) < δ (ε, t0), then ∀
t ∈ [t0, ∞) x(t) − ξ (t) <
ε.
3.5.2 Strong asymptotic -stability
definiton:If ξ (t) is a solution of the
differential equation ẋ = f (x, t), we say that
the
solution ξ (t) = 0 is a strong asymptotic-stable
solution, if for ∀ t0 ∈ [a, ∞)and for
∀ ε > 0 ∃ δ (ε,
t0) > 0, that if x(t) is a solution
andx(t0) − ξ (t0) < δ (ε, t0), then ∀
t ∈ [t0, ∞) x(t) − ξ (t)
→ 0.
3.5.3 Lyapunov’s first theorem
Let us suppose, that x0 is a steady-state point and
V (x) is a positive definitescalar-valued function
(Lyapunov-function). If
V̇ (t, x) = dV (t, x(t))
dt ≤ 0
then the steady-state point is Lyapunov-stable.
If
V̇ (t, x) = dV (t, x(t))dt
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
41/82
3.5.4 Estimating the stability region in the neighborhood
of the steady-state point with quadratic
Lyapunov-functioncandidate
Let us take take the second steady-space point, and the
following quadraticLyapunov function candidate:
V [x(t)] = (x − x∗)T Q(x − x∗) (40)
where x∗ is equal to the vector (32), and Q
is a diagonal unit weightingmatrix. This results in the
Lyapunov-function candidate:
V [x(t)] = (x1 − 0.105)2 + x22 +
(x3 − 1/2 π)
2 + x24+ (x5 − 0.101)
2 + (x6 − 0.1)2 + x27 + x
28 (41)
If we compute dV dt
, we can give a conservative estimation of the
stabilityregion. The points were dV
dt is negative, belong to the strong asymptotically
stable region of the steady-state point.
dV
dt =
∂V
∂x
dx
dt =
∂V
∂xf̄ (x) (42)
where f̄ (x) = f (x) + g(x)C (x)
with C (x) beeing the static feedback law.In the case of
the first steady-state point C (x) = u1 =
0.0554.
At the steady-space point (32) the value of
∂V ∂t
is of course zero, becausethe system is on the edge of
stability.Along α = x3, lT 1 =
x5 and lT 2 = x6 the function
dV dt
does not change, becauseof the Hamiltonian properties of
the system (the description of Hamiltoniansystems can be found in
[9]).
We can study the behavior of dV dt
in the neighborhood of the state-point
described in (32), along the directions parallel to the axes
x1, x2, x4, x7, x8.So, we can get cuts of the function (42).
The following figures depict dV
dt as
a function of state-space variable pairs.
40
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
42/82
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7 −0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
−1000
−500
0
500
1000
ω [rad/s]
q1
d V / d t
Figure 16: The change of ∂V ∂t
along q 1 and ω
0
0.1
0.20.3
0.4
−0.1
0
0.1
0.20.3
0.4
−140
−120
−100
−80
−60
−40
−20
0
q1
q2
d V / d t
Figure 17: The change of ∂V ∂t
along q 1 and q 2
0
0.1
0.2
0.3
0.4
−0.4−0.3
−0.2−0.1
00.1
0.20.3
−800
−600
−400
−200
0
200
400
600
q2
ω [rad/s]
d V / d t
Figure 18: The change of ∂V ∂t
along q 2 and ω
41
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
43/82
−0.2−0.1
00.1
0.20.3
0.40.5
−0.4
−0.2
0
0.2
0.4−8000
−7000
−6000
−5000
−4000
−3000
−2000
−1000
0
q1
vT1
[m/s]
d V / d t
Figure 19: The change of ∂V ∂t
along vT 1 and q 1
3.6 Zero dynamics
We call the systems behavior zero dynamics in the
case, when its is outputforced to be identically zero (all time
derivatives of the output are zero). Weneed to examine the zero
dynamics’s stability for controller design purposes.
Let us study the zero-dynamics for the input-output pair:
u1 (the flexormuscle’s activation signal), and h(x)
= x3 − π/2. In this case y ≡ 0
outputmeans 90◦ joint angle.
α = x3 ≡ π/2 ⇒ ẋ3 =
0 ⇒ ω = x4 ≡ 0 ⇒ ẋ4
= 0
From equation (20):
ẋ4 = 1
Θ
+ ml2COM (M + mlCOM cos(x3 + ξ )gy)
= 0 (43)
with α = π/2 and ξ =
−π/2 we get cos(α + ξ ) = 1.
Next we define a constant denoted by H 1:
mlCOM gy.
= H 1 < 0 where gy
= −10m/ss.
Equation (43) can be equal to 0, if only if the joint torque
M is equal toH 1, thus equation (43)
implies
M = −H 1
42
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
44/82
We know from equation (12) that:
M = M f − M e
= F flexord − F extd =
(F CE 1 + F lig1)d −
(F CE 2 + F lig2)d
In the position α = π/2 we can neglect the
forces of ligaments (because theyonly appear at the position near
to the maximal flexed/extended states),and we suppose, that the
extensor muscle is totally inactive, so we can alsoneglect
F CE 2. This simplifies the equation above to
M = F CE 1d = (F maxF
L(lCE )F v(vCE )x1 + F PE )d
Passive force of the muscle does also not appear in this
position, so we neglectit, and obtain the simplified equation for
the joint torque:
M = F CE 1d = (F maxF
L(lCE )F v(vCE )x1)d (44)
If α ≡ π/2, d prox =
ddist = 0.2m and d = 0.01 we can compute
the flexormuscle’s length from (18) as:
lCE = 0.3368 − x5
So, we can determinate F L(lCE ), which will only
depend on x5=lT 1 by usingequation (1).
Furthermore, if
1 − ω ≤
lCEloptCE
≤ 1 + ω
then we can compute the flexor muscle’s contracting velocity
from the time
derivative of the muscle length:
vCE = dlCE
dt
If we take α = π/2, vCE will
depend only on x7 = vT 1
Next we can compute F v(vCE ) by using the
equation (3).
43
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
45/82
From equation (44) and M = −H 1
we get:
−H 1dF maxF
L(lCE (x5))F v(vCE (x7))
= x1.
= −H 2
F L(lCE (x5))F v(vCE (x7)) (45)
where H 2 is a newly defined constant.
In this case zero-dynamics means that the torques originating
from the ten-don’s dynamics have to be balanced by the change of
muscle activation state.The states of tendon change the length (and
so the contracting velocity) of muscles - in this way they
change the muscle’s force. This means the change
of the joint torques. The muscle activation also changes the
muscle’s force,balancing the equilibrium of the joint torques.
3.6.1 Zero dynamics state-space equations
With the simplifications of the zero dynamics above, and from
equation (20)we can write the zero-dynamics state-space model in
the following form:
ẋ1 = dq1dt
= − 1τ act
(β + [1 − β ]u1(t))
−H 2FL(lCE (x5))F v(vCE (x7))
+ 1τ act
u1(t)
ẋ2 = dq2dt = 0
ẋ3 = dαdt
= x4 = 0
ẋ4 = dωdt
= 1Θ+ml2
COM
((F maxF L(lCE (x5))F v(vCE (x7))
−H 2
FL(lCE (x5))F v(vCE (x7)))d + H 1) = 0
ẋ5 = dlT 1dt
= x7
ẋ6 = dlT 2dt
= x8
ẋ7 = dvT 1
dt = −
kt(x5−lslackt )+sT x7−(F maxFL(lCE
(x5))F v(vCE (x7))) −H 2FL(lCE (x5))F v(vCE
(x7))zT
= −kt(x5−lslackt )+sT x7+F maxH 2
zT
ẋ8 = dvT 2
dt = −
kt(x6−lslackt )+sT x8zT
(46)
44
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
46/82
3.6.2 Computing the zeroing input
If we know the form of q 1 = x1
as the function of time in equation (45), wecan compute it’s
time-derivative:
dx1dt
= d
dt
−H 2F L(lCE )(x5)F v(vCE )(x7)
(47)
= H 21
(F L(lCE )(x5)F v(vCE )(x7))2 ·
·
F v(vCE )(x7)
d
dtF L(lCE )(x5) + F L(lCE )(x5)
d
dtF v(vCE )(x7)
By the derivation rule of composite functions we can compute
ddt
F L(lCE (x5))which will depend on x5 and
x7.
Similarly, we can also compute ddt
F v(vCE ).
If we susbstitue the results to (47) we can compute
dx1dt
.
If we take the firs the first equation of (46), and we know the
form of ∂x1∂t ,we can compute the zeroing input
as follows:
dx1dt
= − 1
τ actβx1 +
−
1
τ act[1 − β ]x1 +
1
τ act
u(t)
and therefore
u(t) =dx1dt
+ 1τ act
βx1
− 1τ act
[1 − β ]x1 + 1τ act
(48)
where τ act and β are the same
as in equation (5).
3.6.3 Zero-dynamics analysis results
If we apply the input described in equation (48) to the
open-loop system, wecan notice that the output is indeed
identically zero.
If we analyze the zero-dynamics in some points of the
state-space (thiswas done mostly in steady-state points) we get the
result that the linearizedzero-dynamics is stable in every
investigated case. So we can suppose, thatthe zero-dynamics of the
system is stable. This result is important for input-output type
controller design.
45
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
47/82
4 Controller design
The aim of this chapter is to propose different controllers to
the simple limbmodel and to investigate and compare their
performance. For this purposewe return back to the original model
(γ -loop not included) described in equa-tion (20). In
addition, we suppose that all of the state-space variables
areavailable for the control system for a state feedback.
4.1 Performance specification
Any controller design starts with the explicite definition of
the criteria forthe control system’s performance.
4.1.1 Control aims
Based on the most simple tasks a human upper limb should
perform, wedetermine three basic tasks for the control system:
• Stability: We expect the closed loop system to be stable
in the regionwe apply the selected control method.
• Regulation and Trajectory following: We expect the
applied controlsolving this two basic tasks in limb movement
control.
• Disturbance-rejection: We expect the controller being
not seriouslysensitive for disturbances.
4.1.2 Control domain
Our aim is to control the output of the system in the
neighborhood of α = π/2angle. The values of
other the state-space variables can change in the domain
described in section 2.6.3. The value of the actuation signal
can changebetween 0 and 1 as described in 2.3.4 and 2.6.3.
4.1.3 Disturbances
We complete the model with three disturbances:
• An external mass on the edge of the moving limb-part:
This can be aweight lifted by the limb.
46
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
48/82
• A simplified fatigue model - the drift of the
τ act parameter: As with time
the ATP concentration decreases in the working muscle, the
activationtime increases.
• Spontaneous muscle activity: This phenomenon can be
considered forexample, as a simplified effect of the Parkinson’s
disease.
The state-space equations, modified by the disturbances are in
the fol-lowing form:
ẋ1 = −
1τ act(t)
(β + [1 − β ]u1(t))
x1 + 1τ act(t)
u1(t) + d1(t)
ẋ2 = −
1τ act(t)
(β + [1 − β ]u2(t))
x2 + 1τ act(t)u2(t) + d2(t)
ẋ3 = x4
ẋ4 = 1
Θ+ml2COM
(M (x1, x2, x3, x4, x5, x6, x7, x8)
+mlCOM cos(x3 + ξ )gy + mDlfacos(x3 + ξ )gy)
ẋ5 = x7
ẋ6 = x8
ẋ7 = −kt(x5−lslackt
)+sT x7−F flextor(x1,x3,x4,x5,x7)
zT
ẋ8 = −kt(x6−lslackt
)+sT x8−−F extensor(x2,x3,x4,x6,x8)
zT
(49)
where mD is the external mass, lfa is the
length of the moving limb-part (theforearm), d1(t) and
d2(t) are the spontaneous muscle activities as functionsof
time.
47
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
49/82
Figure 20: The system with the external mass
4.2 Linear SISO LQ regulator
In order to design a linear SISO (single input, single output)
LQ regulator
[17] we use the linearized system model obtained around the
steady-statepoint at π/2 rad and the centered variables x̃
= x − x0 ũ = u − u0, as
inequation (26). We use the flexor muscle’s activation signal as
the only inputto the system. The other input, u2 is
set to be identically zero.
x1(0) = 0.4031x2(0) = 0x3(0) = π/2x4(0) = 0x5(0) =
0.101439
x6(0) = 0.1x7(0) = 0x8(0) = 0
(50)
u0 = 0.2528
We can apply an LQ servo controller (see below) to minimize the
cost func-tion:
(x̃′Qx̃ + ũ′Rũ) dt (51)
48
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
50/82
If A,B and C are the matrices of the linearized system as in
section 4 .1
(denoted there by Ã, B̃, C̃ ) we design
an LQ controller that is in the form of a state feedback
u(t) = −Kx(t) for the linearized system.The extended
state space model used for designing the LQ-servo controlleris as
follows:
ẋ(t)ż (t)
=
A 0−C 0
x(t)z (t)
+
B
0
y(t) = C 0
x(t)z (t)
(52)
where ż (t) = r(t) − y(t) and r(t) is the
reference signal of the system.
We use the following matrices for the penalty function:
Q =
1 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 00 0 0.1 0 0 0 0 0 0
0 0 0 0.01 0 0 0 0 00 0 0 0 1 0 0 0 00 0 0 0 0 1 0 0 00 0 0 0 0
0 1 0 00 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 100000
(53)
R = 10
The penalty matrices’s values were found in experimental ways,
takingthe importance of reference following into account.
Solving the Ricatti-equation with MATLAB (command
lqr ), we obtainthe following value for K:
K = [1.168 − 1.219 7.060 0.287 1.722 −
0.000 − 0.006 − 0.000 − 100.000]
49
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
51/82
4.2.1 Simulation results of the SISO LQ conroller
In this case (used as reference case) no disturbances were used.
In the fol-lowing figure we can see the reference signal and the
output of the system.On the figures the real (decentered) values of
the variables are shown.
0 0.5 1 1.5 2 2.51.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8alfa,r
t [s]
a l f a [ r
a d ] , r [ r a d ]
alfar − reference signal
Figure 21: The output and the reference signal
In this case the reference signal was r(t) = π2
+ π16
sin(3t)
The muscle activation states (q 1, q 2) and the
muscle activation signals (oractuation signals - u1, u2)
are depicted in the following figures:
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
u1,u
2
t [s]
u 1 , u 2
u1
u2
Figure 22: Muscle activation states and muscle activation
signals
If we use the same reference signal, and the following matrices
for thepenalty function,
50
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
52/82
Q =
1 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 00 0 0.1 0 0 0 0 0 00 0 0 0.01
0 0 0 0 00 0 0 0 1 0 0 0 00 0 0 0 0 1 0 0 00 0 0 0 0 0 1 0 00 0 0 0
0 0 0 1 00 0 0 0 0 0 0 0 1000
(54)
R = 1
we get the results depicted on the following figures:
0 0.5 1 1.5 2 2.51.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8alfa,r
t [s]
a l f a
[ r a d ] , r [ r a d ]
alfar − reference signal
0 0.5 1 1.5 2 2.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
q1,q
2
t [s]
q 1 , q 2
q1
q2
Figure 23: The output, the reference signal and the muscle
activations
We can see, that the closed loop system follows the reference
signal withmore delay. The appearance of the delay in the
trajectory following can beexplained with the system’s relative
degree (3). In other words between theinput and the output 3
integrators can be found.
51
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
53/82
4.3 Linear MISO LQ regulator
We are able to use both of the muscle activity signals as input,
and extendthe LQ-servo controller to the MISO (multiple input,
single output) system,for more efficiency and roboustness with the
same linearization method as insection 4.1.
We use the same Q as in equation (54) for the penalty function,
and:
R =
10 0
0 10
(55)
Solving the Ricatti-equation with MATLAB, we get the following
value forK:
K =
0.554 −0.498 3.924 0.137 0.702 −0.011
−0.003 0 −62.934−0.632 0.730 −4.885
−0.174 −0.942 −0.008 0.003 0 77.713
4.3.1 Simulation results of the MISO LQ controller without
dis-
turbanceIn this case the reference signal was the same as above
-
r(t) = π
2 +
π
16sin(3t)
In the following figure we can see the reference signal and the
output of the system:
52
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
54/82
0 0.5 1 1.5 2 2.51.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8alfa,r
t [s]
a l f a [ r a d ] , r [ r a d ]
alfar − reference signal
Figure 24: The output and the reference signal by MISO LQ
control
The muscle activation states, and activation signals are shown
in thefigures below, as functions of time:
0 0.5 1 1.5 2 2.5−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
u1,u
2
t [s]
u 1 , u 2
u1
u2
Figure 25: Muscle activation states, and activation signals
We can see that if the control uses both of the muscles, the
result is moreaccurate trajectory following.
53
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
55/82
4.3.2 Trajectory following results of the MISO LQ controller
with
disturbance
If we use the same LQ servo-regulator and the same reference
signal as inthe previous subsection (4.3.1), and apply the
following disturbances:
• 1 kg mass on the end of the limb (twice as far from the
joint as themass centre of the moving limb part)
• Fatigue - Drift of τ act:
τ act(t) = (1 + 0.5t)τ act
then we get the results shown in the the following figures:
0 0.5 1 1.5 2 2.51.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8
1.85alfa,r
t [s]
a l f a [ r a d ] , r [ r a d ]
alfar − reference signal
Figure 26: The output and the reference signal
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
u1,u
2
t [s]
u 1 , u 2
u1
u2
Figure 27: Muscle activation states, and activation signals
54
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
56/82
4.3.3 Regulation results of the MISO LQ controller with
distur-
bance
If the reference signal is constant, we apply d1(t) and
d2(t) for generatingspontaneous muscle activation for
disturbance. This method can be consid-ered, for example, as a
simple model of the effect of the Parkinson’s disease.
d1(t) = |1.5 ∗ sin(14 ∗ t) ∗ sin(16 ∗ t)|
d2(t) = |1.5 ∗ sin(15 ∗ t) ∗ sin(17 ∗ t)|
The results are depicted in the following figures:
0 0.5 1 1.5 2 2.51.55
1.6
1.65
1.7
1.75
1.8alfa,r
t [s]
a l f a [ r a d ] , r [ r a d ]
alfar − reference signal
Figure 28: The output and the reference signal
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
u1,u
2
t [s]
u 1 , u 2
u1
u2
Figure 29: Muscle activation states, and activation signals
55
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
57/82
4.4 Input-Output linearization
In this section we use only the flexor muscle’s activation
signal as input tothe system (the extensor muscle’s activation
signal is identicaly zero), to geta SISO (single input single
output) structure.
As described in [9] for a nonlinear n-dimensional SISO system
with rela-tive degree r < n we need to apply the
feedback
u = 1
LgLr−1f h(x)
(−Lrf h(x) + v(t)) (56)
and a suitable nonlinear co-ordinate transformation to
obtain:
• a linear subsystem of order r which is
influenced by the chosen inputu - including the external input
v(t) and
• a nonlinear subsystem described by the zero dynamics
This means, that the state-space model of the input-output
linearized closedloop system is the following in the new
co-ordinates:
ż 1 = z 2
˙z r+1 = q r+1(z )
ż 2 = z 3
˙z r+2 = q r+2(z )
... ...
˙z r−1 = z r ż n =
q (z )
ż r = v y = z 1
(57)
where Lf h(x) denotes the Lie-derivative
of h(x) along f .In our case r=3, so a
three dimensional subsystem will be linear in the new
coordinates z 1, z 2, z 3. z 1,
z 2, z 3 can be determined by using the
co-ordinate-transformation z i = L
i−1f h(x).
The remaining part is described by the zero dynamics, which has
to bestable to apply the control. In section 3.6 we have
investigated the stabilityof the zero dynamics and have found that
is stable.
After input-output linearization (IOL) we can apply any kind of
the linearcontrollers, for example a pole-placement control (PP)
for v(t) as the newinput, with the correction of the
reference signal r(t) as described in [17].The signal flow
diagram of the pole-placement servo controller applied tothe
input-output linearized system is depicted in figure 30 . If we
choosethe poles to P 1,2,3 = −50, we get
the the result K = [125000 7500 150],Nx =
[1;0; 0], Nu = 0.
56
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
58/82
If we use poles with lower magnitude, the reference following
will be less
accurate (more delay appears), and if we use greater ones, the
actuationsignal will be larger. This contradicts to the control
requirements describedin section 2.3.4 (the value of the actuation
signal can be only in the range of [0, 1]).
Figure 30: Input-output linearization and pole placement control
withreference signal
57
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
59/82
4.4.1 Simulation results of the IOL-PP controller without
distur-
bance
If we apply the control solutions described above, we get the
following results:
0 0.5 1 1.5 2 2.51.35
1.4
1.45
1.5
1.55
1.6
1.65
1.7
1.75
1.8alfa,reference signal
t [s]
a l f a , r e f s .
alfareference signal
Figure 31: α and the reference signal by
input-output linearization controlwith pole-placement
0 0.5 1 1.5 2 2.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50.05
0.055
0.06
0.065
0.07
0.075
0.08
u1
t [s]
u 1
Figure 32: Muscle activation states, and activation signals
58
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
60/82
4.4.2 Trajectory following results of the IOL-PP controller
with
disturbance
If we use the same disturbances as in section 4.3.2 and the same
referencesignal with the poles P 1,2,3 = −50
we get the following results:
Figure 33: α and the reference signal by
input-output linearization control
with pole-placement
0 0.5 1 1.5 2 2.50
0.02
0.04
0.06
0.08
0.1
0.12
0.14
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50.05
0.055
0.06
0.065
0.07
0.075
0.08
u1
t [s]
u 1
Figure 34: Muscle activation states, and activation signals
59
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
61/82
4.4.3 Regulation results of the IOL-PP controller with
distur-
bance
We use the same functions for d1(t) and d2(t) as
described in subsection 4.3.3,and set the poles to
P 1,2,3 = −50. The results can be seen on
the followingtwo figures:
0 0.5 1 1.5 2 2.5
1.6
1.7
1.8
1.9alfa,reference signal
t [s]
a l f a , r
e f s .
alfareference signal
Figure 35: α and the reference signal by
input-output linearization control
and pole-placement
0 0.5 1 1.5 2 2.50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
q1,q
2
t [s]
q 1 , q 2
q1
q2
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
u1
t [s]
u 1
Figure 36: Muscle activation states, and activation signals
The activation of the extensor muscle originates only from the
used dis-turbance.
60
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
62/82
4.5 Fuzzy Inference System
Soft-computing methods are also quite prevalent for controlling
nonlinear sys-tems [16], because of the application of these
methods do not need the explicitknowledge of mathematical model of
the system. We study the acceptabil-ity of a simple
Fuzzy-controller for the model, with rules and membershipfunctions
designed in intuitive and experimental ways.
4.5.1 Basic concepts in fuzzy theory
At first, we define the basic concepts used in the theory of
fuzzy systems,and fuzzy control.
Fuzzy set:The fuzzy set A defines on a set
X the degree of belonging to A for the
ele-
ments x ∈ X . A can be defined
with the pair (X, µA), where µA :
X → [0, 1]is the membership function
of A.
The main difference between the fuzzy and the ’conventional’ set
theory isthe continual membership function. In ’conventional’ set
theory an elementis either member of the set, or it is not. In
fuzzy set theory for example avalue of a temperature-variable can
be the member of the warm set with 0.5
degree.
Operations on fuzzy sets:In our case we use the following
operations:
• Union: µA∪B(x) = max (µA(x),
µB(x))
• Intersection: µA∩B(x) = min (µA(x),
µB(x))
• Complement: µA = 1 − µA(x)
Direct product of fuzzy sets:Let A1 be a fuzzy set on
the set X i with the membership
function µAi(xi),
Ai = (X i, µAi), i = 1, 2..., n. The
membership function of the fuzzy directproduct A1 × A2 ×
... × An is defined by
µA1×A2×...×An(x1, x2,...,xn) = µA1(x1) ∧ µA2(x2) ∧ ... ∧
µAn(xn)
where ∧ is a suitable T-norm, for example
min (see more in [16]).
61
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
63/82
Fuzzy relation:
µR : X 1 × X 2 × ... ×
X n −→ [0, 1]
R fuzzy relation ↔ (X 1 ×
X 2 × ... × X n, µR)
where µR(x1, x2,...,xn) defines the possibility of the
elements x1, x2,...,xnbeing in relation R.
Cylindrical extension:
If the fuzzy relation R is defined
on X i1×...×X ir where (i1,...,ir) ⊂
1,...,n,then the cylindrical extension of R
to the set X 1 × ... × X n is
µce(R)(x1,...,xn) .= µR(xi1,...,xir)
Projection:If R is a fuzzy relation defined
on X 1×...×X n, the projection of the relation
R to the space X i1 ×...×X ir is a
relation P = P rojX i1×...×X ir ,
which relation’smembership function is with the notation
{ j1,...,jn−r} = {1,...,n}/{i1,...,ir}
µP (xi1 ,...,xir) .= sup
xj1,...,xj
n−r
µR(x1,...,xn)
Fuzzy composition:Let it be
X 1 × ... × X m−1 × X m−1 × ... ×
X r the set of the fuzzy relation RX m × ... ×
X r × X r+1 × ... × X n the set of
the fuzzy relation SX 1 × ... × X m−1 × X r+1 ×
... × X n the set of the fuzzy relation R ◦
S
We get the fuzzy composition with cylindrical
extending (ce) both of therelations to the X 1
× ... × X n product-space, take
the intersection of therelations, and project the result to the
X 1 × ... × X m−1 ×
X r+1 × ... × X nproduct-space.
R ◦ S = P
rojX 1×...×X m−1×X r+1×...×X n[ce(R) ∩
ce(S )]
µR◦S (x1,...,xm−1, xr,...,xn) = supxm,...,xr(µR(x1,...,xr)
∧ µS (xm,...,xn))
Fuzzy composition is important in fuzzy controller design,
becouse (as wewill later see) this method is the connection between
the rules of a controller,and the input data.
62
-
8/17/2019 Daedalus.scl.Sztaki.hu Diploma Csercsik David
64/82
Fuzzy rule base:
We use Mamdani-implication: a → b ≈
a · b
Implication: R: If x is A, then
y is B. Ri = A −→
B is a relation overX × Y .
We have to note that this method is not compatible with the
Bool-algebra,but it can be easily computed, and it is used in the
most case in the practice.
The projection of the relation R = A
−→ B to the Y fuzzy set
gives thecomposition rule of the fuzzy implication:
ProjY (R) = P rojY (A −→ B)
= A ◦ B
where ◦ is the fuzzy composition.
The general form of the fuzzy implication can be described with
the R1, R2,...,Rnrelations (R = ∪Ri) of the
rule-base.
Ri : if x1 is X i1 and ... and xn
is X
in then y is Y
i
In the case of fuzzy control, the R = ∪Ri
rule base (the summation of the
if...then... implications) from the linguistical
statements of the professionalknowledge.
Matching data to a relation:Let x∗ j the
measured value of the variable x j. Let x
∗
j match the A j fuzzyset. In the
case of Ri, let the fuzzy set A j be
defined on the set X
i j.
In this case
The cylindrical extended values of the input data:
D = ce(A1) ∪ ... ∪ ce(An), µD(x1,...,xn, y)
= µA1(x1) ∧ ... ∧ µAn(xn)
The fuzzy form of the Ri Mamdani implication (as a
relation):
Ri = ce(X i1) ∪ ... ∪ ce(X







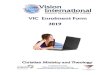







![· ] Diploma Eksekutif Pengurusan (Perniagaan) - USB ] Diploma Eksekutif Pengurusan (Pengurusan Sumber Manusia) ] Diploma Eksekutif Kaunseling — USK ] Diploma Eksekutif Pentadbiran](https://img.dokumen.tips/doc/110x75/5e468d246db00a031002dc50/-diploma-eksekutif-pengurusan-perniagaan-usb-diploma-eksekutif-pengurusan.jpg)













