Embed Size (px)
Citation preview

HAL Id: hal-00919629https://hal.archives-ouvertes.fr/hal-00919629
Submitted on 17 Dec 2013
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Cyclic negative feedback systems: what is the chance ofoscillation?
Arnaud Tonnelier
To cite this version:Arnaud Tonnelier. Cyclic negative feedback systems: what is the chance of oscillation?. Bulletinof Mathematical Biology, Springer Verlag, 2014, 76 (5), pp.1155-1193. �10.1007/s11538-014-9959-1�.�hal-00919629�

Cyclic negative feedback systems: what is the
chance of oscillation?∗
Arnaud Tonnelier
655 avenue de l’Europe, Montbonnot38334 Saint Ismier, France
Tel.: +33-4-76615572
Abstract
Many biological oscillators have a cyclic structure consisting of nega-tive feedback loops. In this paper, we analyze the impact that the addi-tion of a positive or a negative self-feedback loop has on the oscillatorybehaviour of the three negative feedback oscillators proposed by Tsai etal (Science 231:126-129, 2008) where, in contast with numerous oscillatormodels, the interactions between elements occur via the modulation ofthe degradation rates. Through analytical and computational studies weshow that an additional self-feedback affects the dynamical behaviour. Inthe high cooperativity limit, i.e. for large Hill coefficients, we derive exactanalytical conditions for oscillations and show that the relative locationbetween the dissociation constants of the Hill functions and the ratio ofkinetic parameters determines the possibility of oscillatory activities. Wecompute analytically the probability of oscillations for the three modelsand show that the smallest domain of periodic behaviour is obtained forthe negative-plus-negative feedback system whereas the additional posi-tive self-feedback loop does not modify significantly the chance to oscillate.We numerically investigate to what extent the properties obtained in thesharp situation applied in the smooth case. Results suggest that a switch-like coupling behaviour, a time-scale separation and a repressilator-typearchitecture with an even number of elements facilitate the emergenceof sustained oscillations in biological systems. An additional positive self-feedback loop produces robustness and adaptability whereas an additionalnegative self-feedback loop reduces the chance to oscillate.
Keywords : Oscillation - Feedback - Limit cycle - Repressilator - Helmholtzdecomposition
∗To the memory of Jose Manuel Zaldıvar Comenges.
1

1 Introduction
Connected networks arising in systems biology show a wide variety of dynamicalbehaviours, oscillations being a recurrent motif. Oscillations frequently occurin the regulation of biological systems and play a fundamental role in numer-ous physiological processes as the hormone secretion (Walker et al. (2012)),the cardiac electrical activity (Keener and Sneyd (1998)), the circadian rhythm(Goldbeter (2002)) or in pharmacodynamics (Dokoumetzidis et al. (2001)), tomention a few. Therefore, an important topic in mathematical biology has beenthe study of necessary conditions for a system to show and maintain oscillationsin a fluctuating environment such as the interior of a cell (Weber et al. (2011);Mincheva (2011); Tsai et al. (2008); Ferrell et al. (2011) and references therein).Determining the oscillatory regimes of a system described by a set of couplednonlinear differential equations is well recognized as a very difficult problemand finding conditions on a system’s parameters for which a limit cycle existsis revealed to be a major challenge. This issue has been extensively tackledthrough numerical simulations and analytical approaches. Algebraic criteria forbiochemical reaction networks described with mass action law kinetics have beenderived (Mincheva and Roussel (2007); Boulier et al. (2007)). Generalized massaction kinetics and nonmass action kinetics, such as Michaelis-Menten and Hillkinetics, have been studied in (Mincheva (2011)) and (Mincheva and Cracium(2008)), respectively. These approaches are based on the existence of a super-critical Andronov-Hopf bifurcation (Kuznetsov (2004)) and provide a restrictedset of parameters for which small oscillations exist (Tyson (1975)). However theabsence of Hopf bifurcations cannot preclude the existence of a limit cycle thatcould appear through another bifurcation. Necessary conditions for oscillationsbased on a generalized version of the Bendixon-Dulac criterion have been de-rived and applied to polynomial vector fields (Weber et al. (2011)).Sustained oscillations most often result from the interaction of different com-ponents forming complex networks. It has been suggested that the dynamicalproperties of the system could be understood in terms of network connectiv-ity considering the so-called interaction graph (Thomas (1981); Kaufman et al.(2007); Mincheva (2011); Domijan and Pecou (2012); Purcell et al. (2010)). Ahallmark of robust oscillations is the existence of inhibitory feedback loops de-spite the fact that the existence of a negative feedback circuit is not necessary(Richard and Comet (2011)) 1. Negative feedbacks are frequently embedded ina cyclic architecture (Fraser and Tiwari (1974); Hastings et al. (1977); Smith(1987); Mallet-Paret and Smith (1990); Goldbeter (1991); Elkhader (1992);Muller et al. (2006)) that is believed to be the underlying circuit responsiblefor the emergence of oscillations in networks. The cyclic nature of interactionsappears in the description of cascades of enzimatic reactions coupled with genetranscription (see references in (Hastings et al. (1977))), in cellular control sys-tems or in neural systems where the term ’ring’ is used (see various exemples
1The local interaction graph of an oscillatory system does not have necessarily a negativecircuit. However the global interaction graph must have a negative circuit of length at leasttwo.
2

and references in section 4 of (Mallet-Paret and Smith (1990))). The repressila-tor, a well-known synthetic genetic regulatory network, uses a cyclic repressionarchitecture (Elowitz and Leibler (2000); Muller et al. (2006)). For this class ofmodels, many results can be found in the literature. A proof of the existenceof large amplitude oscillations for a three dimensional cyclic negative feedbacksystem with one nonlinearity dates back to Tyson (1975). The proof is basedon the construction of an invariant torus and the use of a fixed point theorem.Hastings (1977) has shown a similar result replacing the sigmoidal response bya step function and has provided results on the unicity and stability of the limitcycle. A general nonlinearity has been tackled by Smith (1986). The extensionto an arbitrary dimension and to a general class of nonlinearities has been per-formed by Hastings et al. (1977). Moreover it has been observed (Fraser andTiwari (1974)) and proved (Smith (1987)) that a qualitative difference occursin the dynamics of negative cyclic systems between an odd number and an evennumber of nodes in the cycle. A significant insight has been accomplished byMallet-Paret and Smith (1990): they have shown that monotone cyclic feedbacksystems can be embedded in R2 and, therefore, the possible dynamics of thenetwork are severely constrained. Common characteristics of global attractorsfor generic cyclic feedback systems have been described by Gedeon and Mis-chaikow (1995) and Gedeon (1998).Even though negative feedback loops are enough to generate oscillations (Gold-beter (1991); Griffith (1968); Elowitz and Leibler (2000); Hirata et al. (2002);Tsai et al. (2008)), many biological oscillators have also positive feedback loops(Harris and Levine (2005); Hornung and Barkai (2008); Angeli et al. (2004);Guantes and Poyatos (2006)) raising the question of the functional role of theseextra loops. It has been shown that the regulation of cell cycle is based on acombination of positive and negative feedback loops (Goldbeter (2002)). Ge-netic oscillators are frequently modeled by a two-component system of repressor-activator type (see for instance Guantes and Poyatos (2006)). There is an exten-sive literature on the coupling of positive and negative feedback loops generat-ing p53 oscillations (Ciliberto et al. (2005); Harris and Levine (2005)). Severalexplanations have been proposed to justify the existence of positive loops inbiological systems. A conjecture by Thomas (Thomas (1981)) demonstrated in(Snoussi (1998); Gouze (1998); Plahte et al. (1995); Cinquin and Demongeot(2002)) states that the presence of a positive feedback loop is a necessary con-dition for biological systems being able to possess multiple steady states. Inparticular a bistable behavior can be obtained inducing a switch-like response(Angeli et al. (2004); Cherry and Adler (2000)). Tsai et al. (2008) arguedthat the existence of a positive feedback loop makes oscillatory systems easy totune and more robust (see also (Stricker et al. (2008))). This is an importantcharacteristic that living systems should possess when exposed to a changingenvironment (Stricker et al. (2008)). Moreover it is believed that positive con-trol elements might improve the reliability of the oscillations and induce highnoise-resistance (Elowitz and Leibler (2000)). Positive feedback loops allowthe stabilization of active steady states (Lopez-Caamal et al. (2013)) whereaspositive-plus-negative feedback loops are thought to be involved in the balance
3

between noise buffering and signaling sensitivity (Hornung and Barkai (2008)).The study of the network architecture and its relation with the dynamical be-haviour has attracted a lot of attention but the geometrical properties of thevector field generating the flow of the system have been poorly explored. A firstattempt in this direction has been carried out by Demongeot et al. (2007a,b).They shown that a close link exists between sustained oscillations and the exis-tence of a potential-Hamiltonian decomposition of the vector field. For Lienardpolynomial system, the Hamiltonian part of the decomposition provides an ac-curate approximation of the limit cycle. However the link with the interactiongraph of the system and the applicability of the method to a dimension greaterthan two have not been addressed. There is a need to fill the gap between os-cillations, interaction graph and vector-field properties.In this paper, we study the cyclic inhibitory feedback systems considered byTsai et al. (2008) where the symmetry of the cycle can be broken by an addi-tional negative or positive self-feedback loop. In Sect. 2 we present the models.In Sect. 3.1 we discuss the nature of the interactions and in Sect. 3.2 we exhibita vector-field decomposition of the 3D system. Fixed points are studied in Sect.3.3 and a qualitative description of oscillations in terms of slow-fast dynamicsis provided (Sect. 3.4). In the idealized case of step-like coupling, we deriveexact conditions for the existence of oscillations and we describe analyticallythe ranges of model parameter where stable limit cycles can be found (Sect.3.5). Numerical simulations in the smooth-coupling case are performed in Sect.3.6. We generalize some results to large cyclic repression systems in Sect. 3.7and we conclude by a discussion (Sect. 4).
2 Models
The dynamics that controls the synthesis and degradation of molecules is anelaborate process supported by a complex circuitry forming positive and nega-tive feedback loops. All the feedbacks are not active at the same time and itis thought that only small size circuits are involved in the modulation of themolecule concentration at a given period of its life (Harris and Levine (2005)).In this context, simple oscillators have been used as minimal models to unravelthe complexity of network dynamics (Ferrell et al. (2011); Purcell et al. (2010)).Among them cyclic three-component oscillators have attracted a lot of atten-tion (Hastings (1977); Goldbeter (1991); Ferrell et al. (2011)). In this paperthe oscillator models formulated in (Tsai et al. (2008)) are considered (see also(Angeli et al. (2004)) and (Ferrell et al. (2011))): each oscillator is modeled bya dynamical system of three variables where the temporal evolution is driven bya linear term plus a Hill-type coupling term. The first oscillator model, referredto as the negative feedback-only oscillator (the No-oscillator in the sequel) isdescribed by a set of three coupled non linear differential equations
dA
dt= k1(1 − A) − k2AS1(C), (1)
4

dB
dt= k3(1 − B) − k4BS2(A),
dC
dt= k5(1 − C) − k6CS3(B).
Variables, A, B and C, represent a concentration of a molecule or a chemicalspecies; a gene, a protein or a metabolite. Parameters (ki)i=1,...,6 > 0 are rateconstants and (Si)i=1,2,3 are the Hill functions
Si(x) =xni
Kni
i + xni
, (2)
where ni > 0 are Hill coefficients and Ki > 0 are the median effective con-centration values of the Hill functions (i.e. the half-maximal concentrations).Parameters Ki are also referred to as the microscopic dissociation constants orsaturation constants, or when Hill functions have a sharp transition, as thresh-olds or switching values. Without cooperative binding, i.e. for ni = 1, theinteractions follow the Michaelis-Menten kinetic model, Ki being the Michaelisconstant.Two other oscillators have been introduced: the negative-plus-negative oscilla-tor (NN-oscillator in the sequel) and the positive-plus-negative oscillator (PN-oscillator in the sequel). These oscillators have an additional self-feedback loopon the A-component of the No-oscillator. For the NN-oscillator, equation (1)becomes
dA
dt= k1(1 − A) − k2AS1(C) − k7AS4(A), (3)
and for the PN-oscillator a positive feedback is introduced
dA
dt= k1(1 − A) − k2AS1(C) + k7(1 − A)S4(A). (4)
where S4 is given by (2). The No-oscillator belongs to the class of repressilator-type models (Elowitz and Leibler (2000)) that are characterized by the cyclicinhibitory connection of elements (proteins that cyclically repress the synthesisof another). The presence of a positive self-feedback loop for the PN-oscillator isa characteristic feature of amplified negative feedback oscillators (Purcell et al.(2010)) where one species amplifies its own production.The system is endowed with properties frequently encountered in regulatorysystems. The internal dynamics of each molecule is described by a linear termthat combines a constant (normalized) production with a degradation term (ordilution) using a constant relaxation time τi = 1/ki. The couplings betweencomponents are monotone (a positive influence remains positive at all concen-trations 2, and vice versa) and are described by standard Hill’s equations mul-tiplied by the concentration of the associated molecule. It is worth noting thatthe coupling term can be rewritten as a modulation of the degradation rates
2Except for the PN-oscillator (see Sect. 3.1)
5

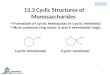
unlike many regulatory models where the coupling acts on the synthesis term(we will discuss this point latter, section 3.5.2). A schematic view of the oscil-lators is provided in Fig. 1.Due to the Bendixson’s and Dulac’s criteria, it is well known that the two com-
NN − PN
A
BC
PN
Figure 1: Schematic view of the oscillator models. The additionnal loops ofthe negative-plus-negative oscillator (labelled NN) and positive-plus-negativeoscillator (labelled PN) are represented in dotted lines.
ponents version of the No-oscillator and NN-oscillator are not able to generateoscillations and a minimal oscillator with negative interactions only has at leastthree components. The three-node architecture proposed for the No-oscillatormodel appears as a recurrent network motif in many different independent bi-ological contexts (Pigolotti et al. (2007)). It has been widely used as a genericand realistic minimal model responsible for the oscillatory behaviour observed incomplex networks ( Goldbeter (1991); Ferrell et al. (2011); Boulier et al. (2007);Pigolotti et al. (2007)). The ring architecture made of successive negative inter-actions is a common motif in regulatory networks or signaling systems (Angeliet al. (2004); Pigolotti et al. (2007)).Recently, a similar model of repressilator-type has been studied by Buse et al.(2009, 2010). It has been shown that if the negative feedback is sufficientlystrong and if the sigmoidal interaction is sufficiently stiff then the system oscil-lates. For the models studied here, it has been numerically observed by Tsaiet al. (2008) that the three oscillator models exhibit oscillations and that os-cillatory regimes are more easily obtained in the positive-plus-negative typeoscillator whereas oscillations are limited by the negative self-feedback loop.
3 Results
3.1 The nature of interactions
The positive or negative nature of a loop is determined by the sign of the partialderivative of the functions involved in the loop and is commonly represented byan interaction graph. The sign of the (i, j) component of the Jacobian matrix(see Appendix A), i.e. ∂fi/∂xj , defines the nature of the connection from jto i and the product of the signs of the components defining the loop gives thenature of the feedback loop. In Tsai et al. (2008) another convention seems tobe used since the sign of the scalar term describing the feedback in the equations
6

determines the nature of the interaction. For the oscillators studied here thetwo definitions coincide except for the nature of the self-feedback loop of thePN-oscillator. The positive interaction term (1 − A)S4(A) in the PN-oscillatorequation has a positive derivative on (0, A∗) and a negative derivative on (A∗, 1)where A∗ is the unique solution of xn4+1 + (1 + n4)K
n4
4 x−n4Kn4
4 = 0. Addingthe linear term k1(1−A) the nature of the self-interaction remains variable andcan become negative in particular when k1 is sufficiently large. In the limit oflarge n4 values, it is easy to show that the maximum of the derivative of theinteraction term (1 − A)S4(A) is reached for A = K4 (when K4 < 1) and thefeedback is non-negative if and only if
k1
k7<
n4
4
(
1
K4− 1
)
−1
2
to a leading order in 1/n4. To sum up, the interactions between molecules inducea negative coupling. In addition, each molecule has a negative self-feedbackloop describing the degradation but it is common to ignore it in the interactiongraph (Fig. 1). The additional loop of the NN-oscillator does not change thenature of the self-feedback loop whereas for the PN-oscillator the nature ofthe loop becomes variable: it is negative when the degradation dominates andpositive when amplification dominates. By abuse of language the PN-oscillatoris referred to as an amplified negative feedback oscillator.The oscillator models previously introduced can be generalized and written inan abstract form as
dxi
dt= fi(xi, xi−1), i = 1, 2, . . . , n
where we set x0 = xn with n the number of species involved in the cycle. Forthe negative feedback-only model we have:
fi(xi, xi−1) = k2i−1(1 − xi) − k2ixiSi(xi−1), i = 1, 2, . . . , n.
For the NN-model and PN-model an additional loop, that depends on x1 only,is included in the definition of f1 (see eq. (3) and eq. (4) , respectively). It canbe checked easely that D =]0, 1[n is positively invariant. Moreover we have
∂fi(xi, xi−1)
∂xi−1= −k2ixiS
′
i(xi−1) < 0, ∀x ∈ D and 1 ≤ i ≤ n
and therefore the different oscillators belong to the class of monotone cyclicfeedback systems (Mallet-Paret and Smith (1990)). It is worth noting that themodels considered here do not satisfy the properties of the systems presented in(Hastings et al. (1977)) and in (Smith (1987)) and therefore previous theoremson limit cycle existence do not apply here.If we define ui such that xi = eui , then the cyclic feedback system can berewritten in a more standard decoupled form as
dui
dt= ai(ui) − bi(ui−1), i = 1, 2, . . . , n
where ai(x) = k2i−1(e−x − 1) and bi(x) = k2iSi(e
x).
7

3.2 Helmholtz decomposition, energy dissipation and di-
vergence
Oscillations in biological systems have been widely analyzed via the associatedinteraction graph but the geometrical properties of the system have been poorlyaddressed. One can expect that the structure of the vector field provides anintuitive understanding of the dynamics and gives some key elements to figureout the appearance of stable periodicity.
Let us define S[1]k (x) =
∫ x
0Sk(u)du and S
[2]k (x) =
∫ x
0S
[1]k (u)du. Both integrals
can be analytically expressed with the generalized hypergeometric functions
pFq(a1, . . . , ap; b1, . . . , bq; x) as
S[1]k (x) = x
(
1 −2 F1(1, 1/nk; 1 + 1/nk;−(x/Kk)nk))
, (5)
S[2]k (x) = x
(
1 −3 F2(1, 1/nk, 2/nk; 1 + 2/nk, 1 + 1/nk;−(x/Kk)nk))
. (6)
Let Fi be the vector field of oscillator i where i ∈ {No, NN, PN} stands forone of the three different oscillators. The oscillators share a similar Helmholtzdecomposition of their vector field
Fi = −∇φi + ∇× G (7)
where φi is a scalar potential defining the conservative part of the vector field.The vector potential G is identical for all oscillators and is given by
G(A, B, C) =
k6CS[1]3 (B)
k2AS[1]1 (C)
k4BS[1]2 (A)
.
The scalar potential φi can be decomposed as φi = φ+ φi where φ is a potentialcommon to all oscillators given by
φ(A, B, C) =k1
2(1 − A)2 + k4S
[2]2 (A) +
k3
2(1 − B)2 + k6S
[2]3 (B) + . . .
+k5
2(1 − C)2 + k2S
[2]1 (C). (8)
φi is an oscillator-dependent potential induced by the self-feedback loop and isgiven by
φNo(A) = 0,
φNN (A) = k7AS[1]4 (A) − k7S
[2]4 (A),
φPN (A) = k7(A − 1)S[1]4 (A) − k7S
[2]4 (A).
The vector field of each oscillator is the sum of a curl-free vector field, definedby φi, and a divergence-free vector field, defined by G. The divergence-freepart defines the circulation density (source free) of the oscillators and remains
8

the same in the three versions of the oscillators. The curl-free part definesthe source density and reflects the difference between each oscillator induced bythe additional self-feedback. The modification of the source density term can bemeasured directly by the divergence of the vector field. Physically the divergencemeasures to which extent the flow generated by the vector field behaves as asource or a sink. The divergence describes the rate of change of an infinitesimalstate space volume V (t) following the flow defined by F and we have div(F (x)) =V (t)/V (t). In conservative systems there is no change of the total energy andtherefore the state space volume is constant and divF = 0. In non-conservativesystems, if divF > 0 the volume V (t) increases and the vector field flow behaveslike a source, whereas if divF < 0 then V (t) decreases and the vector field flowbehaves as a sink. We have
divFi = −∆φi,
and we calculate for the No-oscillator
divFNo = −k1 − k3 − k5 − k2S1(C) − k4S2(A) − k6S3(B) (9)
which is negative. For the NN-oscillator, we get
divFNN = divFNo − k7S4(A) − k7AS′
4(A) (10)
which is still negative. For the PN-oscillator, we obtain
divFPN = divFNo − k7S4(A) + k7(1 − A)S′
4(A) (11)
which has k7(1 − A)S′
4(A) as a positive term in the divergence traducing theexistence of a positive self-feedback. It is easy to show that the sum of the twoterms adding divFNo in the right hand side of (11) is positive when A ∈ (0, A∗)where 0 < A∗ < 1 is the unique solution of n4K
n4
4 − (n4 + 1)Kn4
4 x − xn4 = 0.It is worth noting that the existence of an Helmhotz decomposition is not insuredby the Helmholtz-Hodge theorem which applies for a decaying vector field thatvanishes at infinity. Here, the system lies on a bounded space (the cube [0, 1]3)where the decomposition is not unique. It is easy to check that φ = k1A+k2B+k3C and G = 0.5(k2C − k3B, k3A − k1C, k1B − k2A)t satisfy ∇φ = ∇× G.
3.3 Steady states
Without interactions between molecules, i.e. k2 = k4 = k6 = k7 = 0, theoscillators have (A, B, C) = (1, 1, 1) as a globally attractive steady state. Thenegative coupling modifies the nature of the resting state and qualitatively thenew fixed points result from a balance between an attraction towards (1, 1, 1)driven by the internal dynamics and an attraction towards (0, 0, 0) generated bythe inhibitory connection. If a static balance can not be reached, a dynamicalstate induced by the negative interactions emerges with possibly the birth ofoscillations.Steady states are points in the state space where the curl-free component equals
9

the divergence-free component of the vector field. For oscillator i, the steadystate X0 = (A0, B0, C0) satisfies
∇φi(X0) = ∇× G(X0).
For the No-oscillator we obtain
A0 = (1 + r2,1S1(C0))−1,
B0 = (1 + r4,3S2(A0))−1,
C0 = (1 + r6,5S3(B0))−1,
where rp,q is the ratio of rate constants kp/kq. The functions fk : x → 1/(1 +rkSk(x))) (where rk = r2k,2k−1) are decreasing and thus
A0 = f1(f3(f2(A0))) (12)
has at most one solution. Since f1(f3(f2(0))) > 0 and f1(f3(f2(x))) − x < 0for sufficiently large x, equation (12) has exactly one solution. The stability isgiven by the eigenvalues of the jacobian matrix. For the NN-oscillator, usingsimilar arguments one can show that there is exactly one steady state. Howeverfor the PN-oscillator several steady states can coexist as shown in Fig. 2.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
Negative only
Negative−Negative
Positive−Negative
A
0.13 0.16 0.190.1
0.2
0.3
0.4
Figure 2: Determination of the A-component of the steady states as the crossingpoint between the curves and the straight line y = A, for the different oscillators.For the negative feedback-only oscillator and the negative-plus-negative oscilla-tor there exists one fixed point. For the positive-plus-negative oscillator, severalsteady states can coexist. The inset shows a zoom on the corresponding region.Parameters are r2,1 = r4,3 = r6,5 = 10, r7,1 = 100, K1 = K2 = K4 = 0.2,K3 = 0.25 and n1 = n2 = n3 = n4 = 3.
It is worth noting that the No-oscillator is invariant under the circulating per-mutation
k1 → k3 → k5 → k1,k2 → k4 → k6 → k2,K1 → K2 → K3 → K1,n1 → n2 → n3 → n1.
10

The symmetry is broken by the additional self-feedback loop and thus, in com-parison with the No-oscillator, the possible oscillator birth or oscillator deathobtained for the NN-oscillator or the PN-oscillator is induced by symmetrybreaking.
3.4 The fast-slow repressilator
A qualitative understanding of the emergence of oscillations is provided by afast-slow timescale analysis of the negative feedback oscillators. Let us con-sider the No-oscillator where we assume that the rate constants k1, k3 and k5
are small, i.e. k1, k3, k5 ∼ ǫ where ǫ ≪ 1. If the sigmoidal interactions aresufficiently sharp, thus starting from an underthreshold initial condition (i.e.each sigmoidal function Si is inactivated), the system evolves following the slowdynamics
dA
dt= k1(1 − A),
dB
dt= k3(1 − B),
dC
dt= k5(1 − C),
that continues as long as the concentrations of the different molecules are belowtheir associated thresholds, i.e. A < K2, B < K3 and C < K1. When onespecies reaches its threshold, the corresponding interaction is activated. De-pending on the relative location of K1, K2, K3 and the relative strength of therate constants k1, k3 and k5, different oscillatory patterns can be obtained. Letus assume that C reaches its threshold K1 first. At that time, noted t0, theconcentration of molecule A follows the fast dynamic
dA
dt= −k2AS1(C)
and quickly tends towards 0. We enter a regime where A(t) ≪ 1 and B, Cslowly tend towards 1. Let t1 be the time at which B(t1) = K3. At that time,C tends towards 0 following a fast dynamics whereas A enters a slow recoveryprocess towards 1 while B continues to increase towards 1. At a time noted t2,A reaches its threshold and subsequently B is reset to 0 whereas C starts itsrecovery process that will define a time t3 such that C(t3) = K1. These differentregimes repeat indefinitely giving rise to an oscillatory activity characterized bythe successive resetting of variables A, B and C (fast trajectory towards 0)following by recovery processes towards 1 (see Fig. 3). It should be notedthat the fast-slow repressilator presented here has a fast repressor dynamicsin contrast with many synthetic oscillators where the activation is fast andrepression is slow (Purcell et al. (2010)).From the previous discussion, it is easy to show that a necessary and sufficientcondition to have a periodic switch between the fast and the slow regimes is
11

0 300 600 900−0.2
0
0.4
0.8
1.2
A(t)B(t)C(t)
t0 t
1t2
t3
Oscillatory patternTransitory phase
K2
K1
K3
Figure 3: Oscillatory activity of the fast-slow negative feedback-only oscillatoras a function of time. Parameters are k1 = k3 = k5 = 0.01, k2 = 30, k4 = 10and k6 = 10. The threshold values are K1 = 0.6, K2 = 0.8 and K3 = 0.9. TheHill coefficients are n1 = n2 = n3 = 100.
Ki < 1, i = 1, 2, 3. The analysis is valid in the limit of a sharp sigmoid, i.e.ni ≫ 1, and we will show in the next section that this condition prevents theoccurence of fixed points that would lead to oscillator death.
3.5 The high cooperativity limit
The Hill functions describe the cooperative dynamics of macromolecules. In-teractions of Hill type are modeled by sigmoidal functions where the slope ofthe curve near the median effective concentration is governed by the Hill coeffi-cient. When the Hill coefficient is large (ni ≫ 1), a situation that we refer to asthe high cooperativity limit, the transition around Ki is sharp and the sigmoidbehaves as an Heaviside-step function generating a switch-like interaction. Thefunctions Si, eq. (2), become
Si(x) = Θ(x − Ki)
where Θ is the Heaviside step function and parameter Ki plays the role of athreshold. The idealization of nonlinear functions by an Heaviside step functionto address oscillations dates back to McKean (1970) and Hastings (1977). Ithas been long-past observed that many biological interactions exhibit a switch-like behaviour and threshold-dominated systems have attracted a widespreadinterest (see references in (Mestl et al. (1995a))). The resulting piecewise linearsystems have been proposed as a modelling framework in biology allowing ef-ficient simulations while being analytically tractable. Piecewise linear systemshave been introduced for the study of regulatory networks (Glass and Kaufman(1973); Mestl et al. (1995a); Gouze and Sari (2003)) and have been successfullyapplied to the qualitative simulation of genetic networks (de Jong et al. (2003)).
12

Earlier results on the possible oscillatory regimes have been obtained by Glassand Pasternack (1978a) and greatly extended by Snoussi (1989), Farcot andGouze (2010) and Lu and Edwards (2010).For the piecewise linear version of the oscillators studied here, it is possible toderive analytical conditions for the existence of oscillations. Let us define thefollowing critical values
K∗
1 =k5
k5 + k6, K∗
2 =k1
k1 + k2, K∗
3 =k3
k3 + k4.
For the NN-oscillator, we define the two additional critical values
K∗
4,a =k1
k1 + k2 + k7, K∗
4,b =k1
k1 + k7
and for the PN-oscillator, we define
K∗
4 =k1 + k7
k1 + k2 + k7.
Each critical value is the ratio of the rate constants of the reaction kinetics withand without interactions. We find that the conditions for the existence of anoscillatory regime are determined by the relative location of Ki, i = 1, 2, 3, 4with the associated critical values K∗
i and with unity (see appendix B.2). Moreprecisely, for the No-oscillator, oscillations exist when
K∗
1 < K1 < 1,K∗
2 < K2 < 1,K∗
3 < K3 < 1.(13)
For the NN-oscillator, the existence of oscillations is given by the followingnon-intersecting sets
K∗
1 < K1 < 1,K∗
2 < K2 < 1,K∗
3 < K3 < 1,K4 > 1,
or
K∗
1 < K1 < 1,K∗
4,a < K2 < K∗
4,b,
K∗
3 < K3 < 1,0 < K4 < K∗
4,b.
(14)
For the PN-oscillator, we find
K∗
1 < K1 < 1,K∗
2 < K2 < 1,K∗
3 < K3 < 1,K4 > K∗
4 ,
orK∗
1 < K1 < 1,K∗
4 < K2 < 1,K∗
3 < K3 < 1.(15)
The projection of the sets (13), (14) and (15) on the (K2, K4) parameter planeis shown in Fig. 4. An example of a limit cycle together with the correspondingoscillatory pattern is plotted in Fig. 5. When one of the inequalities defining thesets (13), (14) and (15) is violated, a stable fixed point appears (see appendixB.1) leading to the so-called oscillator death. When K4 > 1, the additionalself-feedback loop of the NN and PN-oscillator is inactive and the conditionsfor the existence of oscillations are identical for all oscillators, i.e. K∗
i < Ki <1, i = 1, 2, 3.
13

00
1
1
K K2*
2
4K
00
1
1
K KK K2** *
*
4 4
K
2
4K
,
4b,
a ,b0
01
1
K K2*
2
4K
*K4
K*4
A B C
Figure 4: Locus of existence of stable oscillations in the (K2, K4) parame-ter space (shaded grey) for (A) the negative feedback-only oscillator, (B) thenegative-plus-negative oscillator and (C) the positive-plus-negative oscillator.Parameters, Ki, i = 1, 3, satisfied K∗
i < Ki < 1.
3.5.1 Remarks on oscillatory activities
The oscillatory patterns that we obtained are expected to be limit cycles, i.e. pe-riodic trajectories. The main reason is based on the results of Mallet-Paret andSmith (1990) on smooth monotone feedback systems and its possible general-ization to discontinuous systems: without stable fixed points, the trajectories ofthe system approach as t → ∞, either a limit cycle, or a set consisting of equi-libra together with homoclinic and hetereclinic orbits. In particular, chaoticsolutions do not occur. Homoclinic or heteroclinic orbits do not exist in thestudied systems. The proof is trivial for regular fixed points and we assumethat the possible singular fixed points do not support these connecting orbits.Numerically we only observed limit cycles or fixed points.We have, strictly speaking, only derived sufficient conditions for the existenceof oscillatory patterns. These conditions are necessary if we assume that theexistence of a stable fixed point precludes the existence of stable limit cycles,i.e. bistability between a fixed point and a limit cycle is ruled out. Manynegative cyclic feedback systems share this property (Tyson (1975); Hastings(1977); Hastings et al. (1977); Smith (1987); Mallet-Paret and Smith (1990);Muller et al. (2006), and other references therein) that holds for systems whereoscillations occur through a supercritical Hopf bifurcation, in contrast with thesubcritical Hopf bifurcation that may support bistability. Thus we have rigor-ously derived only a subset of the total oscillatory domain but, numerically, wedid not observed bistability.Additional complications in the analysis are generated by the nature of theflow on the switching surfaces where singular solutions may exist (Glass andPasternack (1978a,b); Snoussi and Thomas (1993); Mestl et al. (1995a)). A rig-orous definition of these states can be found in the Filippov textbook (Filippov(1988)). Another way to study dynamics on singular domain is the singular
14

0 5 10 15
0.5
0.6
0.7
0.8
0.9
1
1.1
A(t)B(t)C(t)
A B
Figure 5: Oscillations in the piecewise linear negative feedback-only oscillator.A) Limit cycle in the phase plane. The phase plane is partitioned into rectangu-lar regions delimited by the switching planes A = K2, B = K3 and C = K1. B)The corresponding trajectories of the three variables of the model. Parametersare ki = 1, i = 1, . . . , 6 and K1 = 0.6, K2 = 0.7 ,K3 = 0.8. The initial conditionis (A(0), B(0), C(0)) = (0.5, 0.5, 0.5).
perturbation method of Plahte and Kjoglum (2005) and Ironi et al. (779-794).These approaches have been recently revisited by Machina et al. (2013) andreformulated in the complementarity systems framework by Acary et al. (2013). Due to the particular nature of the systems studied here, there are no oscil-latory trajectories with a sliding part but steady states may lie on a switchingsurface. Such steady states are the so-called singular steady states in contrastwith the regular steady states commonly encountered in smooth dynamical sys-tems. The study of the existence and stability of steady states done in appendixB.1 encompasses these two cases.It is worth noting that (i) the limit cycles do not occur through the destabiliza-tion of a fixed point undergoing an Andronov-Hopf bifurcation and thereforewe are not limited here to small size limit cycles. (ii) Multistability betweentwo stable fixed points exists only for the PN-oscillator: one fixed point satis-fies Ass = K∗
4 and the other Ass = K∗
2 . This is in agreement with the resultstating that positive loops are responsible for multistability (Snoussi (1998)).(iii) When a regular fixed point exists, it is stable and only singular fixed pointscan be unstable. In particular, the singular fixed point (K2, K3, K1) may existfor the three different oscillators and is always unstable. For the NN- and PN-oscillator an additional singular fixed point may occur on the switching surfaceA = K4 and can be stable for the NN-oscillator whereas it is always unstablefor the PN-oscillator.
15

3.5.2 Links with previous works
The analytical treatment of the piecewise linear oscillators uses a partition of thephase space into orthants defined by the thresholds. A common representationof the dynamics uses the so-called state transition diagram of the system (Glassand Pasternack (1978a,b)). The state transition diagram is a directed graph thatcan be assigned to piecewise linear systems due to the constant direction of theflow across the common boundary of neighboring orthants. The nodes representorthants, the arrows denote the direction of the flow between orthants and aboolean variable is associated to each orthant. For instance 010 correspondsto the configuration A < K2, B > K3 and C < K1. The state transitiondiagram does not depend on the precise values of the parameters but rather onthe location of the so-called focal points. In Fig. 6 we plot the state transitiondiagram of the No-oscillator for ki = 1, i = 1, . . . , 6 and Ki = 2/3, i = 1, 2, 3showing the existence of a so-called logical cycle. Since there is no branchingpoint the logical cycle is a cyclic attractor of the system. A conjecture of
111
010 110
000 100
101001
011
Figure 6: State transition diagram for the negative feedback-only oscillatorwhere K∗
i < Ki < 1, i = 1, 2, 3. The cyclic attractor is represented by heavyedges.
Glass and Pasternack (1978a) (conjecture 2) stated that the existence of a cyclicattractor in the state transition diagram implies the existence of a stable limitcycle in the associated piecewise-linear differential system. This conjecture hasbeen refined and shown in (Glass and Pasternack (1978b)) for piecewise linearsystems with identical decay rates: if the state transition diagram supportsa cyclic attractor then the corresponding differential system tends towards alimit cycle or asymptotically approaches the origin, the origin being the singularsteady state where each variable equals to its threshold value. A similar theoremhas been previously derived in (Hastings (1977)) for a three dimensional system.Recent outcomes that generalize previous results have been obtained by Farcotand Gouze (2009, 2010) for non uniform decay rates and multiple interactionloops.To make a comparison with our analysis it is convenient to rewrite the equationsin the following form
dxi
dt= αi(X) − γi(X)xi, i = 1, 2, . . . , n (16)
16

where X is the boolean vector X = (Θ(x1 − K2), Θ(x2 − K3) . . . ,Θ(xn − K1)),αi(X) denotes the production rate and γi(X) is the relative decay rate. For-mulation (16) is commonly used to describe the dynamics of regulatory geneticnetworks (Glass and Pasternack (1978b); Mestl et al. (1995a,b)). However onlyone threshold per variable is used and thus the PN- and NN-oscillators cannot berecasted in this framework. Moreover common assumptions are to consider iden-tical decay rates and to use the production term to describe the interactions,in contrast with the No-oscillator studied here where the coupling is definedthrough the degradation rate
γi(X) = k2i−1 + k2iXi−1,
(we define X0 = Xn) and the production rate is assumed to be constant
αi(X) = k2i−1.
Oscillations are therefore induced by the modulation of the decay rates andnot by the time evolution of production rates. Mathematically, the equationspresent piecewise constant decay rates unlike the vast majority of previous workthat uses constant rates and piecewise constant production terms. Moreover an-other significative difference with previous work on periodic orbits (Glass andPasternack (1978b); Farcot and Gouze (2009)) is the interaction structure ofthe model: each variable inhibits the production of the next variable that differfrom systems where each variable activates the next variable except one (notedxn) which inhibits x1.The cyclic attractor of the transition graph is closely related to the existence ofan absorbing torus-like region for the smooth system (Buse et al. (2010)) whichis conected with the partition of the state space into several regions where thesign of the flow remains constant. The signature of the dynamics is a patternsimilar to the one obtained here (Buse et al. (2009)): (110) → (100) → (101) →(001) → (011) → (010) which is remiscent to the functioning of the ring oscilla-tor (an odd number of not gate in series forming a chain) in electronics.Finally, a closely related study in term of methodology has been performed byMahaffy (1980) in the field of neurosciences. Sufficient conditions for oscillationsin neural networks are derived from stable fixed points analysis. Similarly toour approach, the author uses a step function to idealize the nonlineraties, con-siders inhibitory connections and focuses on circular architectures. Analyticalexpressions on network structure are obtained for a network to generate andsustained oscillations (including chaotic solutions).
3.5.3 Probability of oscillations
A Monte Carlo approach has been used by Tsai et al. (2008) to explore in theparameter space the domain of existence of stable limit cycles. They gener-ated random parameter sets for the three different oscillators and determinedwith the numerical integration of the equations whether oscillatory regimes areobserved. One of the goals of this paper is to provide an analytical understand-ing of the results numerically obtained by the authors (Fig. 4 in (Tsai et al.
17

(2008))). On the other hand, determining the probability of oscillations has atwofold interest. First it allows to tackle the issue of robustness of oscillationsand, secondly, it provides a quantitative measure of the percentage of oscillatorycells.In the limit ni → ∞ we have obtained in the previous section the domain of ex-istence of oscillatory activities. Thus we will derive analytically the probabilityof oscillations for the different oscillator models.Negative feedback-only oscillator. Let PNo be the probability of the No-oscillatoroscillating. We have
PNo =∏
i=1,2,3
P (K∗
i < Ki < 1),
or equivalently
PNo =∏
i=1,2,3
(1 − P (Ki > 1) − P (Ki < K∗
i )) .
Let us assume that the thresholds, Ki, i = 1, 2, 3, are random variables thatfollow continuous uniform distributions on [0, Ki] and we note Ki ∼ U(0, Ki)where (Ki) are positive constants that we assume greater than 1 for simplicity.We also assume that the rate constants kj , j = 1, . . . , 6 satisfy ki ∼ U(0, ki).We have
P (Ki > 1) = 1 −1
Ki
. (17)
Using K∗
1 = k5/(k5 + k6), we obtain
P (K1 < K∗
1 ) =1
K1k5k6
k6∫
0
k5∫
0
x
x + ydxdy. (18)
We define
F (x) =ln(1 + x)
x(19)
and we calculate
P (K1 < K∗
1 ) =1
2K1
(
F
(
k6
k5
)
− F
(
k5
k6
)
+ 1
)
(20)
and similar equations hold for the expressions of P (K2 < K∗
2 ) and P (K3 < K∗
3 ).Let (H) be the following assumption: the thresholds (Ki), i = 1, 2, 3, the selfrate constants (k2i−1) and the coupling rate constants (k2i) have identical andindependent uniform distributions. We note
(H)
Ki ∼ U(0, K),k2i−1 ∼ U(0, k)k2i ∼ U(0, kc)
(21)
18

where K ≥ 1, k > 0 and kc > 0 where the subscript ’c’ stands for ’coupling’.The probability of oscillations for the No-oscillator is given by
PNo =1
8K3
(
1 + F (rc) − F
(
1
rc
))3
(22)
where rc is the ratio of the maximal value of the self rate constant over themaximal value of the coupling rate constant, i.e. rc = k/kc. Probability (22)is maximum when rc → 0, and, for small rc values, we derive the followingasymptotic expansion
PNo =1
K3
(
1 −3
4rc +
3
2rc ln rc
)
+ rcǫ(rc), (23)
where ǫ(rc) → 0 as rc → 0. For parameters used in (Tsai et al. (2008)) (seeappendix C) we find PNo = 0.01446. Approximation (23) gives PNo = 0.01443and if we keep only the first term of the expansion we find PNo = 0.01562.In (Tsai et al. (2008)) the value of k5 has been fixed to 1 and therefore K∗
1 =(1 + k6)
−1. Expression (18) becomes:
P (K1 < K∗
1 ) =1
K1k6
k6∫
0
dy
1 + y
which gives
P (K1 < K∗
1 ) =1
K1F (k6)
and we find P (K1 < K∗
1 ) = 1.72 10−3 (instead of P (K1 < K∗
1 ) = 6.39 10−3
when k5 ∼ U(0, k)) that yields PNo = 0.0147.Negative-plus-negative oscillator. For the NN-oscillator, we assume that theparameters of the self-feedback loop satisfy k7 ∼ U(0, k7) and K4 ∼ U(0, K4).From (14) the probability of oscillations for the NN-oscillator is given by
PNN = PNoP (K4 > 1)
+P (K∗
1 < K1 < 1)P (K∗
4,a < K2 < K∗
4,b)P (K∗
3 < K3 < 1)P (K4 < K∗
4,b).
Both probabilities P (K∗
1 < K1 < 1) and P (K∗
3 < K3 < 1) have been previouslycalculated analytically (see (17) and (20)). We have P (K4 > 1) = 1 − 1/K4
and both probabilities, P (K4 < K∗
4,b) and P (K2 < K∗
4,b), are given by (20)
substituting k7/k1 to k6/k5 and using K4 and K2, respectively, instead of K1.To complete the analytical expression of PNN , it remains to calculate P (K2 <K∗
4,a). We get
P (K2 < K∗
4,a) =1
K2k1k2k7
k1∫
0
k2∫
0
k7∫
0
x
x + y + zdxdydz (24)
19

which has an analytical expression given in appendix B.3 (eq. (32)).Assuming that (H) holds, we obtain
PNN = PNo
(
1 −1
K
)
+1
16K4
(
1 − F
(
1
rc
)
+ F (rc)
)2(
1 + F
(
1
rs
)
− F (rs)
)
×
(
1 + F
(
1
rs
)
− F (rs) − 2KINN
)
where INN is the integral in the right-hand side of (24) and rs = k/k7 measuresthe strength of the self-feedback loop. Taking the limit rc → 0 we have INN → 0that yields
PNN =1
K3
(
1 −1
K
)
+1
4K4
(
1 + F
(
1
rs
)
− F (rs)
)2
+ ǫ(rc) (25)
To compare with the No-oscillator, we calculate the zero-order expansion of theratio of probabilities
PNN
PNo
= 1 −1
K+
1
4K
(
1 + F
(
1
rs
)
− F (rs)
)2
for small rc values. The ratio is maximum when rs → ∞ and we have PNN/PNo →1 that corresponds to the case where k7 → 0, i.e. the self-feedback is inactivatedand the two oscillators coincide. The minimum is reached for rs → 0 (strongself-feedback) and we have PNN/PNo → 1 − 1/K. Expression (25) has beenderived assuming rc/rs → 0 and therefore we only capture the limiting regimerc → 0, rs → 0 and rc/rs → 0, i.e. the coupling strength remains greater (of atleast one order) than the self-feedback strength.For a strong self-feedback and a strong coupling, both of the same order, weconsider rc = rs = r ≪ 1, and, from the complete expression of PNN , wecalculate
PNN =1
K3
(
1 −1
K
)
+ ǫ(r) (26)
which coincides with the asymptotic development (25) when rs → 0.For parameters used in (Tsai et al. (2008)) (see appendix (C)), we find PNN =0.0109 using the exact analytical expression. Asymptotic expansion (25) givesPNN = 0.0118. In the so-called ’strong positive feedback’ case, i.e. rc = rs =0.01, we find PNN = 0.0108 and approximation (26) gives 0.0117.Positive-plus-negative oscillator. As for the NN-oscillator, we take k7 ∼ U(0, k7)and K4 ∼ U(0, K4). From (15) the probability of oscillations for the PN-oscillator is given by
PPN = PNoP (K4 > K∗
4 )
+P (K∗
1 < K1 < 1)P (K∗
4 < K2 < 1)P (K∗
3 < K3 < 1)P (K4 < K∗
4 ).
20

All the probabilities occuring in the expression of PPN have been calculatedanalytically hereinabove except P (K4 < K∗
4 ) and P (K2 < K∗
4 ). We have
P (K4 < K∗
4 ) =1
K4k1k2k7
k1∫
0
k2∫
0
k7∫
0
x + z
x + y + zdxdydz
that can be rewritten as
P (K4 < K∗
4 ) =1
K4− IPN
where
IPN =1
K4k1k2k7
k1∫
0
k2∫
0
k7∫
0
y
x + y + zdxdydz
has been previously calculated analytically (from eq. (24), switching k2 and k1).A similar expression holds for P (K2 < K∗
4 ).Assuming that (H) holds, we calculate
PPN = PNo
(
1 −1
K+ IPN
)
+1
4K2
(
1 + F (rc) − F
(
1
rc
) )2
IPN
(
1
K− IPN
)
.
Taking the limit rc → 0 we get IPN → 1/K and we obtain
PPN =1
K3+ ǫ(rc) (27)
that yields PNP /PNo → 1. The limit does not depend on rs unlike the NN-oscillator. For a strong negative coupling and a strong self-feedback, we noter = rc = rs → 0. We find IPN → 1/(2K) and we calculate
PPN =1
K3
(
1 −1
4K
)
+ ǫ(r) (28)
that is lower than the limit (27) obtained as rc → 0 and rs fixed.For K = 4, rc = 0.01 and rs = 0.1, we find PPN = 0.01438 using the exactanalytical expression and we find PPN = 0.01562 using (27). When rc = rs =0.01, i.e. strong coupling and strong self-feedback, we have PPN = 0.01356 andapproximation (28) gives 0.01367.Probabilities of oscillations as a function of the coupling ratio rc are plotted Fig.7 for the three oscillators. Different values for the self feedback ratio are used.Probability of oscillations for the different models decreases with rc suggestingthat strong negative coupling facilitate oscillations. The addition of a negativeself-feedback reduces the chance to oscillate whereas a moderate positive self-feedback does not modify significantly the probability of oscillations as shownFig. 8. The effect of a negative or a positive self-feedback loop is illustrated in
21

−10 −8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
%
rc
−10 −8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
rs=0.001
rs=1
rs=1000
%
rc
−10 −8 −6 −4 −2 0 2−4
−3
−2
−1
0
1
2
rs=0.001
rs=1
rs=1000
%
rc
Figure 7: Log-log plot of the percentage of parameter sets that yield stableoscillations as a function of the coupling ratio, rc = k/kc, for the negativefeedback-only oscillator (left panel), negative-plus-negative oscillator (middlepanel) and positive-plus-negative oscillator (right panel). For the two last oscil-lators, the percentage is computed for different values of the self-feedback ratiors = k/k7.
details Fig. 9 where the probability is plotted as a function of rs for different rc
values. It is shown that the probability of oscillations is an increasing functionof rs and crucially depends on the coupling ratio rc. As the self-feedback ratiors increases a sigmoid-type transition occurs from a low-probability level to ahigher probability level. The transitions for the PN and NN oscillators arecompared Fig. 10. The high-probability level is reached when rs → +∞ (weakself-feedback). This level can be maintained for a large range of rs values whenthe self-feedback loop is positive. However when rc ≫ 1 the difference inducedby the nature of the self-feedback connection vanishes and the probability ofoscillations becomes negligible.The strong coupling regime (rc ≪ 1) is related to the fast-slow repressilatorpreviously discussed and is revealed to be the configuration that maximizes thechance to function in an oscillatory regime. Moreover when the strength of theself-feedback is also strong, we found, for rs = rc ≪ 1,
PNN =1
K3
(
1 −1
K
)
,
PPN =1
K3
(
1 −1
4K
)
which has PNN = 33/44 ≈ 0.1055 and PPN = 3/4 as a maximum when K = 4/3and K = 1, respectively.Figure 8 indicates that the high cooperativity regime gives an upper approxi-mation of the probability of oscillations comparing to the smooth case for thethe No-oscillator and NN-oscillator whereas a lower approximation is obtainedfor the PN-oscillator.
22

0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
% o
f par
amet
er s
ets
with
a s
tabl
e lim
it cy
cle
HCL
HCL and rc → 0
From Tsai et al (2008)
Pos+NegNeg + NegNeg Only
Figure 8: Percentage of parameter sets that yield stable oscillations. Eachgroup is for an oscillator: the negative feedback-only oscillator (left group), thenegative-plus-negative oscillator (middle group) and the positive-plus-negativeoscillator (right group). The black bar is for the high cooperativity limit (HCL)with a coupling ratio rc = 0.01 and a self-feedback ratio rs = 0.1. The middlebar represents the maximum probability obtained as the coupling ratio rc tendstowards 0 (strong coupling). The right bar represents the result of the numericalinvestigations in the smooth case.
3.5.4 Helmholtz decomposition of the piecewise linear oscillators
In the high cooperativity limit, the functions (5) and (6) can be simplified asfollows
S[1]i (x) = (x − Ki)Θ(x − Ki),
S[2]i (x) =
1
2(x − Ki)
2Θ(x − Ki)
and the scalar potential (8) can be rewritten as quadratic function combinedwith step functions. It is straightforward to show that the potential functionsof the oscillators admit a global minimim. Oscillations are therefore generatedby a balance between an attracting fixed point where the gradient part vanishesand a rotating part derived from the potential vector
G(A, B, C) =
k6C(B − K3)Θ(B − K3)k2A(C − K1)Θ(C − K1)k4B(A − K2)Θ(A − K2)
.
For the No-oscillator and for parameters satisfying (13), the minimum is given
(Am, Bm, Cm) =
(
k1 + k4K2
k1 + k4,k3 + K3k6
k3 + k6,k5 + K1k2
k5 + k2
)
.
If Ki > 1, the corresponding minimum is 1. Therefore the necessary conditionfor the existence of a limit cycle Ki < 1 can be reformulated as : the minimum
23

−10 −5 0 5−12
−10
−8
−6
−4
−2
0
2
rc=100
rc=1
rc=0.01
−8 0 8
0.25
−8 0 8
−1.8
−8 0 8
−10.7
r s −10 −5 0 5−12
−10
−8
−6
−4
−2
0
2
rc=100
rc=1
rc=0.01
−8 0 8
0.25
−8 0 8
−1.75
−8 0 8
−10.7
r s
Figure 9: Log-log plot of the percentage of parameter sets that yield stableoscillations as a function of the self-feedback ratio, rs = k/k7, for the negative-plus-negative oscillator (left panel) and positive-plus-negative oscillator (rightpanel). The percentage is computed for different values of the coupling ratio:rc = 100, rc = 1 and rc = 0.01. The insets are rescaling of the Y-axis of thecorresponding curve (see also Fig. 10).
point of the potential energy has to be greater than the median effective con-centration (component by component).For the NN-oscillator, the additional term in the potential energy can be rewrit-ten as
φNN (A) =k7
2(A2 − K2
4 )Θ(A − K4).
The minimum point remains unchanged if Am < K4 and a sufficient conditionis K4 > 1 corresponding to the upper zone of existence of limit cycles (see Fig.4B). In this case the minimum point Am is lower then the median effectiveconcentration K4 but gretaer than K2. For the other set of parameter valuesyielded oscillations ( bottom left part of Fig. 4B), the minimum is given by
Am =k1 + k4K2
k1 + k4 + k7,
and Bm, Cm remain unchanged. Thus Am > K2 is equivalent to the necessarycondition K2 < K4,b previously derived (when K4 < 1).For the PN-oscillator, we have
φPN (A) =k7
2(A − K4)(A + K4 − 2)Θ(A − K4).
The minimum stays unchanged if Am < K4, otherwise the minimum becomes
Am =k1 + k7 + k4K2
k1 + k4 + k7.
In both cases Am > K2 reads K2 < 1.
24

−10 −5 0 50.05
0.15
0.25
0.35
0.4
rs
NNPN
%rc=0.01
−10 −5 0 5
−1.9
−1.8
−1.7
−1.6
rs
NNPN
% rc=1
−10 −5 0 5
−10.8
−10.7
−10.6
rs
NNPN
% rc=100
Figure 10: Log-log plot of the percentage of parameter sets that yield stableoscillations as a function of the self-feedback ratio for different values of the cou-pling ratio. The negative-plus-negative oscillator is compared with the positive-plus-negative oscillator for different values of the coupling ratio: rc = 0.01 (left),rc = 1 (middle) and rc = 100 (right).
3.6 The smooth case: numerical analysis of oscillatory
regimes
In this section we will investigate numerically the smooth sigmoidal case and wewill determine the domain of existence of stable oscillations in the parameterspace together with the size and location of the limit cycles.
3.6.1 Domain of oscillations
We redid the numerical experiments of Tsai et al. (2008): for the differentoscillators, we generated random parameter sets (see appendix C) until wehad obtained 500 that gave stable oscillations. The distributions of parame-ters (Ki)i=1,...,4 that give oscillations are represented with histograms shown inFig. 11A, B and C for the three different oscillators. Figures 11D and E showthe distributions in the (K2, K4) plane for the NN- and PN-oscillator and Fig.11F, G and H show the distributions of the Hill coefficients. Figure 11 indicatesthat there are no significative differences in the distribution of parameters be-tween the No-oscillator 3 and the NN-oscillator. The histograms of the medianeffective concentrations are peaked near a value slightly less than 1 (reminis-cent to the condition for oscillations Ki < 1 obtained for the step-like coupling)whereas the Hill coefficients are mainly located at large values. Therefore a highcooperativity facilitates oscillatory activities and explained the upper approxi-mation of the probability of oscillations obtained when ni ≫ 1. The existence ofa positive self-feedback loop makes more uniform the distributions of parametersindicating weak constraints on parameters for limit cycle existence. ParameterK4 of the NN-oscillator has to be large (greater than 1) suggesting that theadditional negative self-feedback loop is preferentially inactived during oscilla-tions whereas the positive loop plays an enhancing role in oscillatory regimes
3The nonsymmetric distribution of parameters (Ki)i=1,2,3 observed for the No-oscillatoris due to the fact that k5 has been fixed to 1.
25

0 1 3 40
20
40
60
0 1 3 40
20
40
60
0 1 3 40
20
40
60
Negative only
K2
K3K
10 1 3 4
0
20
40
60
0 1 3 40
20
40
60
0 1 3 40
20
40
60
0 1 3 40
20
40
60
Negative − Negative
K1
K2 K
3K
40 1 3 4
0
20
40
60
0 1 3 40
20
40
60
0 1 3 40
20
40
60
0 1 3 40
20
40
60
Positive − Negative
K2
K3
K1
K4
A B C
0 1 2 3 40
1
2
3
4Negative − Negative
K2
K4
0 1 2 3 40
0.5
1
1.5
2
2.5
3
3.5
4Positive − Negative
K4
K2
D E
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
Negative only
n1
n2
n3
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
Negative − Negative
n1
n2
n3
n4
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
0 2 40
10
20
30
40
50
n4
n1
Positive − Negative
n2
n3
F G H
Figure 11: Distributions of parameters leading to oscillations for the differentoscillator models. (A) Histograms of K1, K2 K3 for the negative feedback-onlyoscillator and of K1, K2, K3, K4 for (B) the negative-plus-negative oscillatorand (C) the positive-plus-negative oscillator. The histograms are computed for500 parameter sets that gave oscillations for each oscillator. The projectionsof the distributions in the (K2, K4) parameter space are shown panel (D) and(E) for the negative-plus-negative oscillator and for the positive-plus-negativeoscillator, respectively. Histograms of the distributions of the Hill coefficients,(ni)i=1,...,4, are shown panels (F), (G) and (H) (models as for (A), (B), (C)respectively).
(histogram peaks for a value less than 1). For the PN-oscillator, a local peak ofthe n4-histogram occurs close to n4 = 2 suggesting that moderate n4 values alsofacilitates oscillations and therefore explains the lower approximation previouslycomputed in the high cooperativity limit.
3.6.2 Location and size of limit cycles
In order to assess the location and the size of the limit cycles we compute for thethree different oscillators and for each variable of the model: (i) the mean value
26

X = 1/T∫ T
0X(t)dt for X = A(t), B(t) or C(t) and (ii) the peak amplitude
|X | = maxX(t) − min X(t) where (A(t), B(t), C(t)) is the limit cycle solutionand T the period of the oscillations. Results are shown Fig 12. It can be
0 0.50
0.25
0.5
0 0.50
0.25
0.5
0 0.50
0.25
0.5
0 0.50
0.25
0.5
0 0.50
0.25
0.5
0 0.50
0.25
0.5
0 0.50
0.250.5
0.751
0 0.50
0.250.5
0.751
0 0.50
0.250.5
0.751
Positive − Negative
Negative− Negative
Negative only
Figure 12: Plots of the peak amplitude as a function of the mean location of thelimit cycles for the three different oscillators. The first row is for the oscillatorwithout self feedback, the second one is for the negative-plus-negative oscillatorand the third one is for the positive-plus-negative oscillator. The left column isfor the A variable, the middle one is for B and the right one is for C. A differentscale of the vertical axis has been used for the positive-plus-negative oscillator.
seen that the PN-oscillator supports a larger variability in the amplitude andlocation of its limit cycle whereas the No-oscillaor and NN-oscillator exhibitssimilar properties. This is also illustrated in Fig. 13 where some limit cyclesare plotted in the phase space. A larger filling is obtained for the PN-oscillator.Results suggest that the addition of a positive self-feedback loop produces ahigher variability and thus enhances the tunability of the system.
3.7 A generalized repressilator-type model
The core pathway motif that underpins sustained oscillations may involve morethan three components. The generalization to an arbitrary number N of chem-ical species is a cyclic biochemical feedback circuit where interactions are se-quenced in series, schematically represented by x1 ⊣ x2 ⊣ . . . ⊣ xN ⊣ x1. Wewill investigate the oscillatory behaviour of the following repressilator-type net-work
dx1
dt= k1(1 − x1) − k2x1S1(xN )
dxi
dt= k2i−1(1 − xi) − k2ixiSi(xi−1), for i = 2, . . . , N,
27

00.2
0.40.6
0.81 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
A
C
00.2
0.40.6
0.81 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
BA
C
00.2
0.40.6
0.81 0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
BA
C
Figure 13: Plots of the limit cycles in the state space (250 limit cycles havebeen plotted) for the negative feedback-only oscillator (left), the negative-plus-negative oscillator (middle) and positive-plus-negative oscillator (right).
where xi is the concentration (or fraction of the concentration) of the chemicalspecies i, k2i−1 and k2i are kinetic constants, Ki are the dissociation constantsand Si are the sigmoidal functions given by (2). Here we restrict our attentionto a network without self-feedback loop. Each species is repressed (inhibited)by the species immediately preceding in the loop. The network architecture isbased on the successive inhibition of the chemical species and follows the designprinciples of the repressilator. A similar generalized model of repressilator-typehas been proposed and studied in (Muller et al. (2006)).For a switch-like coupling obtained in the limit of large Hill coefficients theequations become
dxi
dt= k2i−1(1 − xi) − k2ixiΘ(xi−1 − Ki), for i = 1, . . . , N,
where we define x0 = xN . Shifting the origin to the point of intersection of allthresholds, the system could be rewritten as
dxi
dt= ai(xi) − bi(xi)sgn(xi−1), for i = 1, . . . , N,
where ai(x) = k2i−1 − (k2i−1 + k2i/2)(x + Ki+1), bi(x) = k2i/2(x + Ki+1) andsgn is the sign function.An analysis (not shown) similar to the one performed for the three-componentoscillator gives
• if N is odd, oscillatory regimes are obtained for
K∗
i < Ki < 1, i = 2, . . . , N where
K∗
i =k2i−3
k2i−3 + k2i−2, (29)
where k0 = k2N and k−1 = k2N−1.
28

• if N is even, the network admits at least one stable fixed point. In par-ticular, for parameters belonging to the domain of periodic behaviourobtained for the negative feedback system, i.e. (29), it can be shown thatthe network exhibits bistability between the two stable steady states
(1, K∗
3 , 1 . . .K∗
N−1, 1, K∗
1 ) and (K∗
2 , 1, K∗
4 . . . 1, K∗
N , 1)
This situation is similar to the one encountered for the two-componentsystem where it is easy to see that (1, K∗
1 ) and (K∗
2 , 1) are two stable fixedpoints that coexist if and only if K∗
1 < K1 < 1 and K∗
2 < K2 < 1.
The qualitative difference in the dynamics between an odd and an even num-ber of elements in the cycle has already been pointed out by Fraser and Ti-wari (1974) and studied by Smith (1987) and subsequently in (Mallet-Paretand Smith (1990); Muller et al. (2006)) for similar cyclic feedback systems. Ithas been shown that this difference mainly manifests for strong nonlinearitieswhereas for weak nonlinearities the number of molecules involved in the loopdoes not play a crucial role in the dynamics. An even number of negative in-teractions canceled each other and the network essentially acts as a positivefeedback system. The fundamental difference of both networks is related to thecompetitive nature of negative feedback systems whereas positive feedback sys-tems are of cooperative and irreductible nature in the sense of Hirsch (Hirsch(1982, 1985)). For cooperative systems, almost all trajectories tend to a steadystate that always exists for N even. When two stable fixed points coexist, thesystem is bistable and could function as a switch (Cherry and Adler (2000)).For an odd number of nodes and for uniformly distributed parameters, i.e.Ki ∼ U(0, Ki), i = 1, . . . , N and ki ∼ U(0, ki), i = 1, . . . , 2N , the probability ofoscillations is given by
PNo =
N∏
1
1
2Ki
(
1 + F
(
k2i−2
k2i−3
)
− F
(
k2i−3
k2i−2
))
where we define k0 = k2N and k−1 = k2N−1. The function F (x) is given by (19). For dissociation constants with identical maximal values, Ki = K, and foridentical ratios of maximum rate constants, rc = k2i−1/k2i, we obtain
PNo =1
2NKN
(
1 + F (rc) − F
(
1
rc
))N
. (30)
Probability (30) is represented in Fig. 14A as a function of rc for different Nvalues. In the limit of a strong coupling (or weak internal dynamics), i.e. rc ≪ 1,we obtain the following asymptotic expansion of the probability of oscillations
PNo =1
KN+
Nrc
2KNln(rc) + rcO(1). (31)
Some typical trajectories of network elements are shown Fig.14B for a network ofN = 19 nodes with a weak rc value. The activity is characterized by sequential
29

−8 −6 −4 −2 0 2−20
−16
−12
−8
−4
0
4%
rc
0 100 200 300 400
0
0.5
1
1.5
1714
t
A B
Figure 14: A. Log-log plot of the percentage of parameters leading to oscillationas a function of the coupling ratio rc for different lengths of the negative feedbackoscillator. Probabilities obtained for odd N values from N = 3 (upper) toN = 19 (lower) are depicted. We used K = 2. B. Oscillations in a circularnegative feedback system of N = 19 nodes. Parameters Ki, k2i and k2i areuniformly distributed on (0, 1), (0, 100) and (0, 1), respectively (rc = 0.01).Activity of elements i = 1, 7, 14 is represented (starting from a random intialcondition in [0, 1]N).
successions of active and inactive states. Probability (30) vanishes as N becomeslarge except for K = 1 and for sufficiently small rc values. More precisely, a non-zero probability is reached if and only if rcN ≪ 1, i.e. rc has to be sufficientlysmall with respect to N , or equivalently a necessary and sufficient condition isNrβ
c bounded ∀β < 1.
4 Discussion
In the present work, we corroborated and characterized some observations al-ready made or proved in various biological systems. (i) Oscillations are pro-moted by negative feedbacks. (ii) Strong nonlinearities facilitate oscillations:the more switch-like are the interactions, the easier it is to generate oscillations.(iii) A qualitative difference in the dynamics of monotone cyclic feedback sys-tems occurs between an even or an odd number of components in the cycle.(iv) A strong inhibitory coupling induces a fast-slow dynamics that maximizesthe probability of oscillations. In this regime, the dynamics is characterizedby sequential switches from active to inactive states and vice-versa. (v) Smallmolecular circuits are better candidates to design biological oscillators. As thelength N of the feedback loop increases, the coupling strength 1/rc has to in-crease in order to maintain Nrc ≪ 1. Therefore the claim ’the longer the loop,the easier it is to produce oscillations’ (see for instance (Ferrell et al. (2011)))is not fully corroborated by our study. However we used here a restrictiveframework where interactions are step-like that seems to be unlikely in manybiological systems. It is suspected that a longer cycle allows to a relaxation ofthe assumption on the stiffness of nonlinearities (Smith (1987)) and a balance
30

between ’moderate’ Hill coefficients, sufficiently long feedback loop and stronginhibitory coupling should be reached to maximize the chance to oscillate.Adding a negative self-feedback loop in a negative cyclic feedback oscillatordoes not present any new advantages whereas a moderate positive self-feedbackweakens the constraints on parameters in the oscillatory regime and improvesthe flexibility of the system. Tunability induced by positive loops has alreadybeen observed in molecular systems (Lopez-Caamal et al. (2013); Tsai et al.(2008)) and is essential in cases where cellular processes require a tight regula-tion. The additional self-feedback loop modifies the Helmholtz decompositionof the oscillators. The divergence-free part of the decomposition, analog to acirculating density responsible for a vortex-like behaviour, remains unchangedbut the gradient part that minimizes the corresponding potential energy is af-fected. A positive self-feedback loop increases the divergence of the system andfacilitates oscillations whereas a negative self-feedback loop tends to stabilizethe system on a steady state precluding oscillations. However the Helmholtzdecomposition does not yield any additional results but provides a new point ofview on the structure of the flow of the 3-components negative feedback system.There are various ways of taking into account the fluctuations inherent in realsystems. Two different frameworks have been used to address the issue of ran-domness and limit cycles: random environments (Lin and Kahn (1977)) anduncertain environnements (Falkenburg (1979)). Here we considered random pa-rameters. The system remains deterministic and it is expected that stable solu-tions persist under random perturbations. However the presence of a stochasticterm in the nonlinear differential system may induce new behaviours. A stochas-tic switching between two stable states has been observed in three-node geneticregulatory networks (Li et al. (2012)). It has been shown that the unstableperiodic solution of repressilator-type networks with an even number of nodescan be stabilized with random walk noise (Strelkowa and Barahona (2010)).This suggests that oscillations is more widespread than expected by the studyof the deterministic system and the probability of oscillations are enhanced bya brownian noise.Determining the conditions for robust oscillations has attracted a renewal ofinterest with the emergence of synthetic biology (Elowitz and Leibler (2000);Stricker et al. (2008); Gardner et al. (2000)). It has become possible to con-struct in the laboratory a biological system according to ’design specifications’derived from analytical and/or computational approaches. Networks of inter-acting species (mainly gene networks) are shaped in order to perform a givenfunction, oscillation being the primary target due to its central role in cellularfunctions (Elowitz and Leibler (2000)). The calculation of the probability ofhaving oscillations when fluctuating parameters are considered is of particularinterest in this engineering-based approach. Despite the fact that parameters ofa real biological system are probably not uniformely distributed with indepen-dent distribution, our approach suggests a way to tackle this issue. Moreoverone of the macroscopic data directly available in the in-vivo implementation ofsynthetic oscillators is the percentage of oscillating cells that can, in turn, givesan estimation of the parameter distributions.
31

The sufficient conditions for oscillations derived in the present study are basedon steady states analysis. The strong correlation between the global dynamicsand the properties of the system that arise by steady state analysis has alreadybeen pointed out by Smith (1987). The striking fact is that the local studyinherent in fixed point analysis reveals the global dynamics of the system. Thesufficient conditions thus obtained are necessary if we assume that the existenceof a stable steady state precludes the existence of a stable limit cycle. It isknown that such a bistability-exclusion can be broken by additional interac-tions that modify the cyclic nature or the monotonicity of the model and allowfor multistability between a fixed point and a limit cycle, chaotic solutions ordynamics not allowed in R2. For instance bistability may occur in two-side in-teraction systems, i.e. there exists j such that xj = fj(xj , xj−1, xj+1) (Li et al.(2012)). However due to the generalization of the Poincare-Bendixson theoremof Mallet-Paret and Smith (1990) to the two-sided interaction system, chaoticsolutions are not allowed (Elkhader (1992)). If the monotonicity property failsthen chaotic solutions may appear (Cera et al. (1989)). Moreover a subcriticalHopf bifurcation generating bistability can be obtained in monotone negativefeedback systems with a variable self-feedback loop (Hasty et al. (2002)) indi-cating that bistability-exclusion probably requires monotonicity conditions onthe self-interaction term. However bistability often occurs in a narrow regionof parameter space (see Hasty et al. (2002) for instance) and one can expectthat the probability of oscillations derived from steady state analysis would bea good approximation.We did not consider explicitly delay, an important element present in manybiological systems. It is suspected that an effective form of time delay is, inmany situations, only the result of a cascade of reactions and cellular processesthat occur in the cell and therefore are implicitly taken into account by thecyclic structure of the model (Stricker et al. (2008)). Many properties obtainedfor monotone cyclic feedback systems also hold in the presence of delays andsimilar dynamics is expected (Mahaffy (1980); Smith (1987); Mallet-Paret andSell (1996)).
A The Jacobian matrix
For the negative feedback-only oscillator, the jacobian matrix is given by
JNo =
−k1 − k2S1(C) 0 −k2n1K
n1
1Cn1−1
(Kn1
1+Cn1)2
A
−k4n2K
n2
2An2−1
(Kn2
2+An2)2
B −k3 − k4S2(A) 0
0 −k6n3K
n3
3Bn3−1
(Kn3
3+Bn3)2
C −k5 − k6S3(B)
.
where it is easy to see that each term is negative. For the NN and PN oscillatorsonly the term in the first row and first column differs and we have
(JNN )11 = −k1 − k2S1(C) − k7(n4 + 1)Kn4
4 An4 + A2n4
(Kn4
4 + An4)2
32

that is always negative and
(JPN )11 = −k1 − k2S1(C) + k7n4K
n4
4 An4−1 − (n4 + 1)Kn4
4 An4 − A2n4
(Kn4
4 + An4)2
which has a positive term. Other components are given by (JNN )ij = (JPN )ij =(JNo)ij for (i, j) 6= (1, 1)
B The piecewise linear oscillators
Our analysis is based on the observation that each parameter Ki defines athreshold plane that divises the phase space into rectangular boxes, the so-called regulatory domains. Inside each regulatory domain the system is linearand the analysis is straightforward.
B.1 Fixed points
The three different oscillators may admit fixed points depending on parametervalues. Due to the discontinuity of the vector field, it is convenient to distinguishbetween two classes of fixed points (Glass and Pasternack (1978a); Mestl et al.(1995a); Snoussi and Thomas (1993)): ’regular’ steady points and ’singular’steady points. Regular steady points are defined following the well-establishedtheory of smooth dynamical systems. Singular steady states are characterizedby the fact that at least one of its components lies on a threshold and thusrequire a specific treatment (Filippov (1988)).Let Xss = (Ass, Bss, Css) be a fixed point. The regular fixed points of theNo-oscillator and the corresponding conditions of existence are given by
Ass = 1 for Css < K1 and Ass = K∗
2 otherwise,Bss = 1 for Ass < K2 and Bss = K∗
3 otherwise,Css = 1 for Bss < K3 and Css = K∗
1 otherwise..
It is easy to show that when a regular fixed point exists it is stable. Eachspecies, A, B and C, can formally admit two different values at its resting stateand thus we can distinguish between eight analytically different regular fixedpoints. The different possible steady states are the so-called focal points (Glassand Pasternack (1978a,b); Mestl et al. (1995a)) of the associated regulatory do-main. If the focal point is inside its regulatory domain, it is a stable steady stateof the system. Otherwise the system will leave the current regulatory domainand enter a new one that may have a different focal point.The steady state Xss is a singular fixed point if 0 ∈ F(Xss) where F isthe multi-valued function obtained when the Heaviside function of the com-ponent value that lies on its threshold is allowed to vary in (0, 1). For theNo-oscillator, the only singular fixed point is (K2, K3, K1) that exists when asolution (ΘA, ΘB, ΘC) ∈ [0, 1]3 can be found to the following system
k1(1−K3)−k2K3ΘC = 0, k3(1−K3)−k2K3ΘA = 0, k5(1−K3)−k2K3ΘB = 0.
33

We obtain the conditions
K∗
1 < K1 < 1, K∗
2 < K2 < 1, K∗
3 < K3 < 1,
that (as we will show hereinafter) coincide with the conditions for oscillations.The state (K2, K3, K1) is the so-called loop characteristic state (Snoussi andThomas (1993)) of the No-oscillator. We show in appendix B.4 that this singularfixed point is always unstable.For the NN-oscillator, the values and the conditions for the existence of regularfixed points are identical to those obtained in the No-oscillator model for thetwo components Bss and Css. For Ass we get
Ass = 1 for Css < K1 and K4 > 1,Ass = K∗
4,b for Css < K1 and K4 < K∗
4,b,
Ass = K∗
2 for Css > K1 and K4 > K∗
2 ,Ass = K∗
4,a for Css > K1 and K4 < K∗
4,a,
and, as for the No-oscillator, a regular fixed point, when it exists, is stable.Singular steady points with at least one component on a discontinuity planemay exist. As previously the loop characteristic state (K2, K3, K1) is a singularsteady state, and for K4 > K2, the conditions of existence remain the samethan for the No-oscillator. If K4 < K2 conditions of existence become
K∗
1 < K1 < 1, K∗
4,a < K2 < K∗
4,b, K∗
3 < K3 < 1.
We show in appendix B.4 that this singular fixed point is always unstable.Moreover an additional singular fixed point may occur on the discontinuityplane Ass = K4. This singular fixed point is induced by the additional self-feedback loop and defines a second loop characteristic state of the oscillator. Itis easy to show that this steady-state exists and is stable for K∗
4,b < K4 < 1and Css < K1 or for K∗
4,a < K4 < 1 and Css > K1. The A-component of thesteady-state, Ass, can formally take five different values, so that we distinguishbetween twenty analytically different stable fixed points for the NN-oscillator.For the PN-oscillator, the steady state values Bss and Css and the correspondingconditions of existence remain the same. For Ass we obtain the following valuesand conditions of existence
Ass = 1 for Css < K1,Ass = K∗
2 for Css > K1 and K4 > K∗
2 ,Ass = K∗
4 for Css > K1 and K4 < K∗
4 .
The singular fixed point (K2, K3, K1) when it exists is unstable (see appendixB.4). Moreover, as for the NN-oscillator, the additional self-feedback loop mayinduce the existence of a singular fixed point on the discontinuity plane Ass =K4. It is easy to show that this singular fixed point is always unstable. Tosum up, the PN-oscillator has twelve different forms of stable steady states. Itis worth noting that for Css > K1 the two stable fixed points Ass = K∗
2 andAss = K∗
4 can coexist when K∗
2 < K4 < K∗
4 .
34

To summarize, when a regular fixed point exists, it is stable. In addition,singular fixed points may exist but are unstable except the singular fixed pointof the NN-oscillator satisfying Ass = K4. It is worth mentioning that, for agiven set of parameters, a stable fixed point, when it exists, is unique except forthe PN-oscillator where two stable fixed points may coexist.
B.2 Oscillations
Based on the fixed points analysis done in Appendix B.1 it is possible to deriveanalytically the conditions on parameters of the system for the existence ofstable fixed points. These conditions are monitored by the relative locationbetween Ki, the unity, and the associated critical value K∗
i . For instance, forthe No-oscillator, it is easy to check that when K1 < K∗
1 , K2 > K∗
2 and K3 < 1,the point (K∗
2 , 1, K∗
1 ) is a stable fixed point. It is thus possible to derive exactlythe sets of parameters for which there are no stable fixed points taking thecomplementary of the sets for which stable fixed points exist. These sets aregiven by (13), (14) and (15) for the three different oscillators, respectively. Sincea trajectory cannot escape from the box D = [0, 1]3, an oscillatory pattern existsinside the box. It is suspected that this oscillatory activity corresponds to a limitcycle (see the discussion in the section “Remarks on the oscillatory activities”).
B.3 Calculation of P (K2 < K∗
4,a)
We can easely check that
P (K2 < K∗
4,a) =1
K2k1k2k7
(
G(k2 + k7) − G(k7) − G(k2) + G(0))
(32)
where
G(u) =
k1∫
0
x(x + u) ln(x + u)dx.
Integrating by parts we obtain
G(u) =(k1 + u)2
3(k1 −
u
2) ln(k1 + u) +
u3
6ln(u) −
k1
36(3k1u − 6u2 + 4k2
1)
that completes the analytical expression of P (K2 < K∗
4,a).Let rc = k1/k2 and rs = k1/k7, analytical calculations give
P (K2 < K∗
4,a) =1
K
(
1
3+
rs
6r2c
ln rc +rc
6r2s
ln rs +rcrs
6
( 1
rc
+1
rs
)3ln
( 1
rc
+1
rs
)
+rs
3
( 1
rc
+ 1)2(1
2− rc
)
ln(
1 +1
rc
)
+rc
3
( 1
rs
+ 1)2(1
2− rs
)
ln(
1 +1
rs
)
−1
3
( 1
rc
+1
rs
+ 1)2(rs
2+
rc
2− rcrs
)
ln(
1 +1
rc
+1
rs
)
)
35

B.4 Stability of the origin
For the No-oscillator, the stability of singular steady state (K2, K3, K1) is de-termined by the stability of the origin of
x = k1(1 − K2 − x) − k2(x + K2)Θ(z),
y = k3(1 − K3 − y) − k4(y + K3)Θ(x),
z = k5(1 − K1 − z) − k6(z + K1)Θ(y).
which is given by the study of the trajectories of the system
x = k1(1 − K2) − k2K2Θ(z),
y = k3(1 − K3) − k4K3Θ(x),
z = k5(1 − K1) − k6K1Θ(y).
We define
αi = k2i−1(1 − Ki+1),
βi = (k2i−1 + k2i)Ki+1 − k2i−1,
for i = 1, 2, 3 where we set here K4 = K1 for conveniance. Conditions for theexistence of a singular fixed point at the origin lead to αi > 0 and βi > 0. Thedynamics can be rewritten as
x = α1 if z < 0 and − β1 otherwise,
y = α2 if x < 0 and − β2 otherwise,
z = α3 if x < 0 and − β3 otherwise.
and we have sgn(x) = −sgn(z), sgn(y) = −sgn(x) and sgn(z) = −sgn(y). Notethat a similar system is studied in (Farcot and Gouze (2009)) but with differentassumptions on the parameters. Here we will show using basic calculus that the’local’ system is unstable.The trajectories make revolutions around the origin and pass many times intothe plane x = 0, intersecting it for y > 0 (and z < 0) and for y < 0 (and z > 0)for one revolution. After possibly a transient, the sign of the components defin-ing the trajectory will follow the cycle (+, +,−) → (+,−,−) → (+,−, +) →(−,−, +) → (−, +, +) → (−, +,−) (see figure (6) where 1 corresponds to + and0 to −).The trajectory of the system defines a mapping of the half plane P0 (x0 = 0,y0 > 0, z0 < 0) into itself. The solution with initial value x0 = 0, y0 > 0, z0 < 0lies first in the region (110) i.e. (x > 0, y > 0, z < 0), where the solution hasthe form
x(t) = α1t, y(t) = y0 − β2t, z(t) = z0 − β3t.
The trajectory intersects the plane y = 0 at time ta = y0/β2 at the point
xa = α1/β2y0, ya = 0, za = z0 − β3/β2y0,
36

and enters into the domain 100. Using similar arguments, we compute thedifferent reaching times, ta, . . . , tf , of the different regions (101, 001, 011, 010and 110, respectively) together with the corresponding intersection points. Wefind that from the point x0 = 0, y0 > 0, z0 < 0 in P0 the trajectory first goesback into P0 at the point xf = 0, yf , zf where
(
yf
zf
)
=
(
a11 a12
a21 a22
) (
y0
z0
)
(33)
with
a11 = 3 + u1 + u2 + u3 + u1u2 + u1u3 + u2u3 + u1u2u3 +1
u1+
1
u3+
1
u1u3,
a12 = −β2
β3
(
2 + u1 + u2 + u1u2 +1
u1+
1
u3+
1
u1u3
)
,
a21 = −β3
β2
(
1 + u3 +u3
u2+
2
u2+
1
u1u2+
1
u2u3+
1
u1u2u3
)
,
a22 = 1 +1
u2+
1
u1u2+
1
u2u3+
1
u1u2u3,
where we set ui = αi/βi.Equation (33) defines a 2D-linear mapping. Let λ1 and λ2 be the two associatedeigenvalues. Since we have |λ1| + |λ2| ≥ |λ1 + λ2| = |a11 + a22| > 4 then atleast one eigenvalue is greater than 1 in absolute value. Therefore, the origin isunstable. Numerical investigations suggest than one eigenvalue is large whereasthe other is less than one , in absolute value, indicating a saddle configurationand the existence of a stable manifold associated with the origin.For the two others oscillators, the NN-oscillator and the PN-oscillator, the situ-ation remains the same for K4 > K2. When K4 < K2 we define α1,NN = α1 −k7K2 and β1,NN = β1+k7K2 for the NN-oscillator and α1,PN = α1+k7(1−K2)and β1,PN = β1 − k7(1 − K2) for the PN-oscillator. Conditions for the exis-tence of the singular fixed point (K2, K3, K1) give α1,NN > 0, β1,NN > 0 andα1,PN > 0, β1,PN > 0. Study of stability proceeds along the same lines thanfor the No-oscillator and we show that the origin is unstable.
C Choice of the random parameter sets
For the numerical simulation of the smooth oscillators we used the same param-eter distributions as in (Tsai et al. (2008)). All parameters are dimensionlessand (H) holds (see (21)) with:
• K = 4, i.e. we used Ki ∼ U(0, 4), i = 1, 2, 3, 4,
• k = 10, i.e. we used k1, k3 ∼ U(0, 10),
• kc = 1000; i.e. we used k2, k4, k6 ∼ U(0, 10)
37

except for k5 that has been fixed to 1. For the NN-oscillator and PN-oscillator,we used k7 ∼ U(0, 100). Each Hill coefficient follows an uniform distributionover (1, 4).
References
Acary, V., Jong, H., Brogliato, B., 2013. Numerical simulation of piecewise-linear models of gene regulatory networks using complementarity systems.Physica D in press.
Angeli, D., Ferrell, J.E., Sontag, E.D., 2004. Detection of multistability, bifur-cations, and hysteresis in a large class of biological positive-feedback systems.Proc. Natl. Acad. Sci. USA 101, 1822–1827.
Boulier, F., Lefranc, M., Lemaire, F., Morant, P.E., Urguplu, A., 2007. Onproving the absence of oscillations in models of genetic circuits, in: Anai,H., Horimoto, K., Kutsia, T. (Eds.), Proceedings of Algebraic Biology 2007,Springer Verlag Berlin Heidelberg. pp. 66–80.
Buse, O., Kuznetsov, A., Perez, R., 2009. Existence of limit cycles in therepressilator equations. Int. J. Bifurcat. Chaos 19, 4097–4106.
Buse, O., Perez, R., Kuznetsov, A., 2010. Dynamical properties of the repres-silator model. Phys. Rev. E 81. doi:10.1103/PhysRevE.81.066206.
Cera, E.D., Phillipson, P.E., Wyman, J., 1989. Limit-cycle oscillations andchaos in reaction networks subject to conservation of mass. Proc. Natl. Acad.Sci. USA 86, 142–146.
Cherry, J.L., Adler, F.R., 2000. How to make a biological switch. J. Theor.Biol. 203, 117–113.
Ciliberto, A., Novak, B., Tyson, J.J., 2005. Steady states and oscillations in thep53/ mdm2 network. Cell Cycle 4, 488–493.
Cinquin, O., Demongeot, J., 2002. Positive and negative feedback: striking abalance between necessary antagonists. J. Theor. Biol. 216, 229–241.
Demongeot, J., Glade, N., Forest, L., 2007a. Lienard systems and potential-hamiltonian decomposition i - methodology. C. R. Acad. Sci. Paris, Ser. I344, 121–126.
Demongeot, J., Glade, N., Forest, L., 2007b. Lienard systems and potential-hamiltonian decomposition ii - algorithm. C. R. Acad. Sci. Paris, Ser. I 344,191–194.
Dokoumetzidis, A., Iliadis, A., Macheras, P., 2001. Nonlinear dynamics andchaos theory: concepts and applications relevant to pharmacodynamics.Pharm. Res. 18, 415–426.
38

Domijan, M., Pecou, E., 2012. The interaction graph structure of mass-actionreaction networks. J. Math. Biol. 65, 375–402.
Elkhader, A.S., 1992. A result on a feedback system of ordinary differentialequations. J. Dyn. Differ. Equ. 4, 399–418.
Elowitz, M.B., Leibler, S., 2000. A synthetic oscillatory network of transcrip-tional regulators. Nature 403, 335–338.
Falkenburg, D.R., 1979. Existence of limit cycles in a non linear dynamic systemwith random parameters. WSC ’79 Proceedings of the 11th conference onWinter simulation 1, 159–164.
Farcot, E., Gouze, J.L., 2009. Periodic solutions of piecewise affine gene networkmodels with non uniform decay rates: the case of a negative feedback loop.Acta Biotheoretica 57, 429–455.
Farcot, E., Gouze, J.L., 2010. Limit cycles in piecewise-affine gene networkmodels with multiple interaction loops. International Journal of SystemsScience 41, 119–130.
Ferrell, J.E., Tsai, T.Y., Yang, Q., 2011. Modeling the cell cycle: why do certaincircuits oscillate? Cell 144, 874–885.
Filippov, A.F., 1988. Differential equations with discontinuous righthand sides.Dordrecht, Kluwer Academic Publishers.
Fraser, A., Tiwari, J., 1974. Genetic feedback-repression. ii. cyclic genetic sys-tem. J. Theor. Biol. 47, 397–412.
Gardner, T.S., Cantor, C.R., Collins, J.J., 2000. Construction of a genetic toggleswitch in escherichia coli. Nature 403, 339–342.
Gedeon, T., 1998. Cyclic feedback systems. Mem Am Math Soc 134.
Gedeon, T., Mischaikow, K., 1995. Structure of global attractor of cyclic feed-back systems. J Dyn Differ Equ 7, 141–190.
Glass, L., Kaufman, S., 1973. The logical analysis of continuous non-linearbiochemical control networks. J. Theor. Biol. 39, 103–129.
Glass, L., Pasternack, J., 1978a. Prediction of limit cycles in mathematicalmodels of biological oscillations. B. Math. Biol. 40, 27–44.
Glass, L., Pasternack, J., 1978b. Stable oscillations in mathematical models ofbiological control systems. J. Math. Biol. 6, 207–223.
Goldbeter, A., 1991. A minimal cascade model for the mitotic oscillator involv-ing cyclin and cdc2 kinase. Proc. Natl. Acad. Sci. USA 88, 9107–9111.
Goldbeter, A., 2002. Computational approaches to cellular rhythms. Nature420, 238–245.
39

Gouze, J.L., 1998. Positive and negative circuits in dynamical systems. J. Biol.Sys. 6, 11–15.
Gouze, J.L., Sari, T., 2003. A class of piecewise linear differential equationsarising in biological models. Dynam Syst 17, 299–316.
Griffith, J., 1968. Mathemaics of cellular control processes. i. negative feedbackto one gene. J. Theor. Biol. 20, 202–208.
Guantes, R., Poyatos, J., 2006. Dynamical principles of two-component geneticoscillators. PLoS Comput Biol 2. doi:10.1371/journal.pcbi.0020030.
Harris, S.L., Levine, A.J., 2005. The p53 pathway: positive and negative feed-back loops. Oncogene 24, 2899–2908.
Hastings, S., Tyson, J., Webster, D., 1977. Existence of periodic solutions fornegative feedback cellular control systems. J Differ Equations 25, 39–64.
Hastings, S.P., 1977. On the uniqueness and global asymptotic stability ofperiodic solutions for a third order system. Rocky Mt J Math 7, 513–538.
Hasty, J., Dolnik, M., Rottschafer, V., Collins, J.., 2002. Synthetic gene net-work for entraining and amplifying cellular oscillations. Phys. Rev. Lett. 88.doi:148101.
Hirata, H., Yoshiura, S., Ohtsuka, T., Bessho, Y., Harada, T., Yoshikawa, K.,Kageyama, R., 2002. Oscillatory expression of the bhlh factor hes1 regulatedby a negative feedback loop. Science 298, 840–843.
Hirsch, H., 1982. Systems of differential equations which are competitive andcooperative. i. limit sets. SIAM J. Math. Anal. 13, 167–179.
Hirsch, H., 1985. Systems of differential equations which are competitive andcooperative. ii. convergence almost everywhere. SIAM J. Math. Anal. 16,432–439.
Hornung, G., Barkai, N., 2008. Noise propagation and signaling sensitivityin biological networks: a role for positive feedback. PLoS Comput Biol 4.doi:10.1371/journal.pcbi.0040008.
Ironi, L., Panzeri, L., Plahte, E., Simoncini, V., 779-794. Dynamics of activelyregulated gene networks. Physica D 240.
de Jong, H., Geiselmann, J., Hernandez, C., Page, M., 2003. Genetic networkanalyzer: qualitative simulation of genetic regulatory networks. Bioinformat-ics 19, 336–344.
Kaufman, M., Soule, C., Thomas, R., 2007. A new necessary condition oninteraction graphs for multistationarity. J. Theor. Biol. 248, 675–685.
40

Keener, J., Sneyd, J., 1998. Mathematical physiology. I: Cellular Physiology.Interdisciplinary Applied Mathematics 8, Springer.
Kuznetsov, Y., 2004. Elements of applied bifurcation theory. Applied Mathe-matical Sciences. New York: Springer.
Li, W., Krishna, S., Pigolotti, S., Mitarai, N., Jensen, M.H., 2012. Switch-ing between oscillations and homeostasis in competing negative and positivefeedback motifs. J. Theor. Biol. 307, 205–210.
Lin, J., Kahn, P.B., 1977. Limit cycles in random environments. SIAM J. Appl.Math. 32, 260–291.
Lopez-Caamal, F., Middleton, R.H., Huber, H.J., 2013. Equilibria and stabilityfor a class of positive feedback loops. J. Math. Biol. (in press).
Lu, L., Edwards, R., 2010. Structural principles for periodic orbits in glassnetworks. J. Math. Biol. 60, 513–541.
Machina, A., Edwards, R., van den Driessche, P., 2013. Singular dynamics ingene network models. SIAM J. on App. Dyn. Syst. 12, 95–125.
Mahaffy, J.M., 1980. Periodic solutions for certain protein synthesis models. J.Math. Anal. Appl. 74, 72–105.
Mallet-Paret, J., Sell, G.R., 1996. The poincare-bendixson theorem for mono-tone cyclic feedback systems with delay. J. Differ. Equations 125, 441–489.
Mallet-Paret, J., Smith, H.L., 1990. The poincare-bendixson theorem for mono-tone cyclic feedback systems. J. Dyn. Differ. Equ. 2, 367–421.
McKean, H.P., 1970. Nagumo’s equation. Adv Math 4, 209–223.
Mestl, T., Plahte, E., Omholt, S.W., 1995a. A mathematical framework fordescribing and analysing gene regulatory netwoks. J. Theor. Biol. 176, 291–300.
Mestl, T., Plahte, E., Omholt, S.W., 1995b. Periodic solutions in systems ofpiecewise-linear differential equations. Dynam. Stabil. Syst. 10, 179–193.
Mincheva, M., 2011. Oscillations in biochemical reaction networks arising frompairs of subnetworks. Bull Math Biol 73, 2277–2304.
Mincheva, M., Cracium, G., 2008. Multigraph conditions for multistability,oscillations and pattern formation in biochemical reaction networks. ProcIEEE 96, 1281–1291.
Mincheva, M., Roussel, M.R., 2007. Graph-theoretic methods for the analysisof chemical and biochemical networks. i. multistability and oscillations inordinary differential equation models. J Math Biol 55, 61–86.
41

Muller, S., Hofbauer, J., Endler, L., Flamm, C., Widder, S., Schuster, P., 2006.A generalized model of the repressilator. J Math Biol 53, 905–937.
Pigolotti, S., Krishna, S., Jensen, M.H., 2007. Oscillation patterns in negativefeedback loops. Proc. Natl. Acad. Sci. USA 104, 6533–6537.
Plahte, E., Kjoglum, S., 2005. Analysis and generic properties of gene regulatorynetworks with graded response functions. Physica D 201, 150–176.
Plahte, E., Mestl, T., Omholt, W.S., 1995. Feedback loops, stability and mul-tistationarity in dynamical systems. J. Biol. Sys. 3, 409–413.
Purcell, O., Savery, N.J., Grierson, C.S., di Bernardo, M., 2010. A comparativeanalysis of synthetic genetic oscillators. J. R. Soc. Interface 7, 1503–1524.
Richard, A., Comet, J.P., 2011. Stable periodicity and negative circuits indifferential systems. J. Math. Biol. 63, 593–600.
Smith, H., 1987. Oscillations and multiple steady states in a cyclic gene modelwith repression. J. Math. Biol. 25, 169–190.
Smith, H.L., 1986. Periodic orbits of competitive and cooperative systems. J.Diff. Equations 65, 361–373.
Snoussi, E.H., 1989. Necessary conditions for multistationarity and stable peri-odicity. Dyn. Stab. Syst. 4, 189–207.
Snoussi, E.H., 1998. Qualitative dynamics of piecewise-linear differential equa-tions. J Biol Syst 6, 3–9.
Snoussi, E.H., Thomas, R., 1993. Logical identification of all steady states: theconcept of feedback loop characteristic states. Bull Math Biol 55, 973–991.
Strelkowa, N., Barahona, M., 2010. Switchable genetic oscillator operating inquasi-stable mode. J. R. Soc. Interface 7, 1071–1082.
Stricker, J., Cookson, S., Bennett, M.R., Mather, W.H., Tsimring, L.S., Hasty,J., 2008. A fast, robust and tunable synthetic gene oscillator. Nature 456,516–519.
Thomas, R., 1981. On the relation between the logical structure of systemsand their ability to generate multiple steady states or sustained oscillations.Springer Ser. Synergetics 9, 180–193.
Tsai, T.Y..C., Choi, Y.S., Ma, W., Pomerening, J.R., Tang, C., Ferrell, J.E.J.,2008. Robust, tunable biological oscillations from interlinked positive andnegative feedback loops. Science 321, 126–129.
Tyson, J.J., 1975. On the existence of oscillatory solutions in negative feedbackcellular control processes. J Math Biol 1, 311–315.
42

Walker, J.J., Spiga, F., Waite, E., Zhao, Z., Kershaw, Y., Terry, J.R., Lightman,S.L., 2012. The origin of glucocorticoid hormone oscillations. PLoS Biol 10.doi:10.1371/journal.pbio.1001341.
Weber, A., Sturm, T., Abdel-Rahman, E.O., 2011. Algorithmic global criteriafor excluding oscillations. Bull Math Biol 73, 899–916.
43