Embed Size (px)
Citation preview

_________________________________________________________________________
Fatec Garça
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
CARLOS MASSAAKI OMURA WILLIAN ANTÔNIO BRICHI
AUTOMAÇÃO INDUSTRIAL: IMPLANTAÇÃO DE ROBÔS
GARÇA 2013

2
_________________________________________________________________________
Fatec Garça
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
CARLOS MASSAAKI OMURA
WILLIAN ANTÔNIO BRICHI
AUTOMAÇÃO INDUSTRIAL: IMPLANTAÇÃO DE ROBÔS
Artigo Científico apresentado à Faculdade
de Tecnologia de Garça – FATEC, como
requisito para a conclusão do Curso de
Tecnologia em Mecatrônica Industrial,
examinado pela seguinte comissão de
professores:
Data da Aprovação: 02 / 12 / 2013
________________________________ Prof. Grad. Yuji Yamamoto
FATEC Garça
________________________________ Prof. Dr. Edson Detregiachi Filho
FATEC Garça
________________________________ Prof. Ms. Gustavo Adolfo M. S. Coraini
FATEC Garça
GARÇA
2013

3
AUTOMAÇÃO INDUSTRIAL: IMPLANTAÇÃO DE ROBÔS
CARLOS MASSAAKI OMURA ¹ [email protected]
WILLIAN ANTÔNIO BRICHI [email protected]
YUJI YAMAMOTO ² [email protected]
Abstract: This article presents the development of a robot manipulator prototype
which was designed in the RPP format (Cylindrical Robot) using servo motors, which
move the joints and the claw (actuator).It uses two-degrees-of-freedom. It is controlled
by a PLC (Programmable Logic Controller) and it is supervised by a PWM interface
software. The purpose of the manipulator is to find the object, catch, transport and put
it in a new location. Thus, through innovation it is promoted the social inclusion, since
job vacancies may be created and national productivity may be increased.
Keywords: Robotic Manipulator, PLC, PWM Control.
Resumo: Este artigo apresenta o desenvolvimento de um protótipo de manipulador
robótico que foi projetado no formato RPP (Robô Cilindrico) com servo motor, que
movimentam as articulações e a garra (atuador). Com dois graus de liberdade.
Controlado por um CLP (Controlador Lógico Programável), e supervisionado por um
software com interface PWM, que ira verificar a operacionalidade de um sistema
robótico controlado por microcontrolador, CLP e software supervisório. O objetivo do
manipulador é localizar o objeto, pegar, transporta-lo e coloca-lo em um novo local.
Dessa maneira, mediante a inovação permite promover a inclusão social pela
possibilidade de gerar empregos e aumentar a produtividade nacional.
Palavras-chave: Manipulador Robótico, CLP, Controle PWM.
___________________________________
¹ Alunos do Curso de Tecnologia em Mecatrônica Industrial. Faculdade de Tecnologia de Garça. ² Docente da Faculdade de Tecnologia de Garça.

4
1 - INTRODUÇÃO
A automação industrial é um fenômeno que surgiu na Revolução Industrial, a
partir do século XVIII, sendo utilizados na realização de tarefas que eram feitas
manualmente. O ser humano desde sempre vem buscando soluções tecnológicas
para a redução da participação da mão de obra humana nos processos industriais. A
palavra automação está diretamente ligada ao controle automático de processos,
ações que não mais dependerão da intervenção humana. Porém este conceito é
discutível, pois a mão de obra do ser humano sempre será necessária para a
construção e gerenciamento dos processos automáticos (ROSÁRIO, 2009).
Atualmente, a automação e a robótica vêm sendo muito utilizadas, não
somente nas indústrias pesadas, como indústrias automobilísticas, mas também
como na medicina, com próteses robótica, na teleoperação, dentre outros
(ROSÁRIO, 2011). A Mecatrônica está se tornando cada vez mais ativa na
sociedade, provocando alterações nos seus modos de vida.
A definição de um manipulador robótico, segundo Barrientos (1997), enfrenta
certas dificuldades devido a algumas diferenças de conceito adotadas por alguns
mercados, tais como, o asiático e o euro-americano. Para os orientais, um robô é
qualquer dispositivo mecânico constituído de articulações destinadas a manipulação.
Já no ocidente, é mais restritivo, exigindo um maior grau de complexidade, sobre
tudo no que se refere a forma de controle adotada. A definição mais aceita é a
utilizada pela Associação Internacional de Robótica (RIA), na qual define: Um
manipulador robótico é um manipulador multifuncional reprogramável, capaz de
mover materiais, peças, ferramentas ou dispositivos especiais, em trajetórias
variáveis e programadas para realizar diversas tarefas.
Segundo Rosário (2011), o crescimento da tecnologia relacionado a
Mecatrônica tem gerado grandes benefícios. Com isso possibilita grandes
incrementos na produtividade do trabalho, possibilitando que as necessidades
básicas da população possam ser atendidas. Além de ganhos na produtividade,
redução de custos, aumento na competitividade, os equipamentos automatizados
possibilitam uma melhora na qualidade do produto, uniformizando a produção,
eliminando perdas e refugos, com controle eficaz de processos e controle de
qualidade mais eficiente.

5
Ela permite também a eliminação de tempos mortos, ou seja, permite a
existência de “operários” que trabalhem vinte e quatro horas por dia sem reclamarem,
pois os manipuladores robóticos não comem, não recebem salários, não bebem, não
tem necessidades fisiológicas, que leva a um grande crescimento na rentabilidade
dos investimentos (ROSÁRIO, 2011).
Sem dúvida a Mecatrônica Industrial foi e é um grande impulsionador da
tecnologia. Cada vez mais tem se procurado aperfeiçoar os dispositivos, dotando-os
com inteligência para executar as tarefas necessárias.
Segundo Rosário (2011).
Um estudo conduzido no Japão em 1983 mostrou que existiam no inicio de 1981, no Japão, cerca de 25.000 robôs, cujo valor médio de mercado era de U$$ 17.000. Desses robôs espera-se uma vida útil de seis anos, desde que trabalhem 22 horas por dia, durante os sete dias por semana. Fazendo-se as contas, percebe-se que nesses seis anos o robô trabalhará cerca de 48.000 horas. Isso equivale ao que o operário médio japonês consegue trabalhar em 30 anos, já que trabalha apenas 40 horas por semana. O custo do operário médio para as empresas japonesas, sendo de U$$ 13.000 por ano.
Com o CLP e o sistema supervisório, é possível o controle a distância através
de redes de comunicação, monitoramento de dados em tempo real, processamento
de dados em alta velocidade, proporcionando confiabilidade ao sistema, fácil
entendimento (visualização e operação).
Com o uso do CLP, além de controlar o manipulador, é possível controlar todo
o processo ao redor do manipulador (planta).
O projeto descrito ao longo desse artigo teve como foco de pesquisa o
manipulador robótico, articulado verticalmente com dois graus de liberdade, e uma
garra robótica. No projeto foi implementado um sistema supervisório, o controle de
todo o sistema por CLP e uma placa para controle dos servomotores. O artigo por
sua vez, descreve os componentes para o desenvolvimento do manipulador robótico,
assim como cálculos de dimensionamento, programação, implementação e sistema
supervisório.
Objetivo do Trabalho
Desenvolver um manipulador robótico cuja principal função é manipular,
carregar, operar objetos, com precisão e agilidade, através de sensores, atuadores,
softwares, câmeras, etc.

6
Criar um protótipo funcional que atenda as necessidades para que ele foi
desenvolvido. Buscando conhecimento, e levando tecnologia para os alunos e
sociedade. Procuramos buscar novos conhecimentos para aplicar na vida acadêmica
e profissional, visando sempre aprendizado, buscando e desenvolvendo novas
tecnologias.
2 – REVISÃO BIBLIOGRÁFICA.
Fundamentalmente os robôs industriais apresentam dois grupos de aplicações
(ARMADA, 1995), a saber: a manipulação de materiais diversos e a fabricação. Em
ambos os casos o robô industrial modifica o ambiente, quer por mudar as peças de
lugar, quer por criar um ambiente novo mediante a fabricação.
Segundo Rosário (2011), as aplicações dos robôs nas industrias brasileiras
são diversas. Em termos percentuais, por exemplo, os robôs da ABB são utilizados
para soldagem por resistência por pontos (33%), manipulação de
materiais/paletização (25%), solda arco (18%), pintura (10%), e em outras aplicações
como corte a jato de água, corte por gás, acabamento e montagem (14%), conforme
Figura 2.1.
Figura 2.1 – Aplicação de robôs na Indústria.
Fonte: Adaptado de Rosário (2011).
Para desenvolver esse protótipo, foi necessário estudar vários tipos de
manipuladores.
Alguns tipos de manipuladores robóticos, conforme Figura 2.2:
7
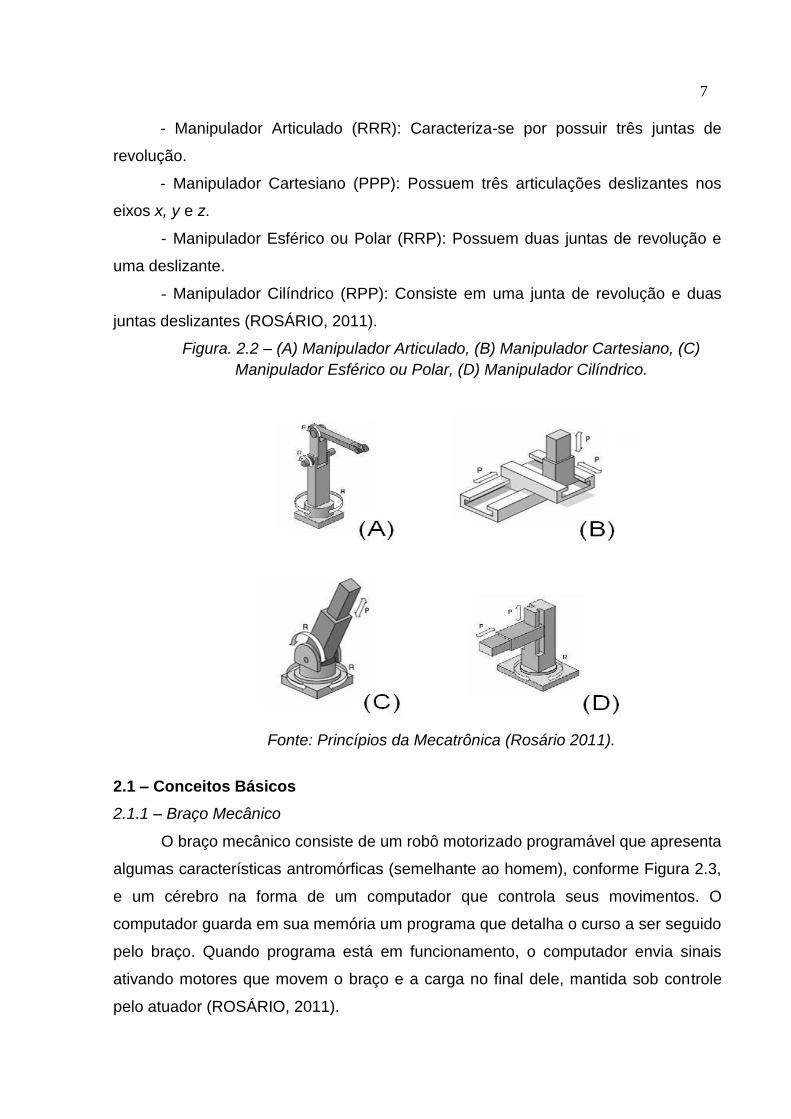
- Manipulador Articulado (RRR): Caracteriza-se por possuir três juntas de
revolução.
- Manipulador Cartesiano (PPP): Possuem três articulações deslizantes nos
eixos x, y e z.
- Manipulador Esférico ou Polar (RRP): Possuem duas juntas de revolução e
uma deslizante.
- Manipulador Cilíndrico (RPP): Consiste em uma junta de revolução e duas
juntas deslizantes (ROSÁRIO, 2011).
Figura. 2.2 – (A) Manipulador Articulado, (B) Manipulador Cartesiano, (C)
Manipulador Esférico ou Polar, (D) Manipulador Cilíndrico.
Fonte: Princípios da Mecatrônica (Rosário 2011).
2.1 – Conceitos Básicos
2.1.1 – Braço Mecânico
O braço mecânico consiste de um robô motorizado programável que apresenta
algumas características antromórficas (semelhante ao homem), conforme Figura 2.3,
e um cérebro na forma de um computador que controla seus movimentos. O
computador guarda em sua memória um programa que detalha o curso a ser seguido
pelo braço. Quando programa está em funcionamento, o computador envia sinais
ativando motores que movem o braço e a carga no final dele, mantida sob controle
pelo atuador (ROSÁRIO, 2011).

8
Ainda segundo Rosário (2011), o braço mecânico é um manipulador projetado
para realizar diferentes tarefas e ser capaz de repeti-las. Os manipuladores possuem
cerca de seis graus de liberdade, sendo três de posicionamento do punho, e os
outros três para a movimentação do restante do manipulador.
Figura. 2.3 – Conceitos básicos de um robô.
Fonte: Princípios da Mecatrônica (Rosário 2011).
2.1.1.1 – Graus de liberdade
Na área da mecânica geral, segundo Carrara (2008), a expressão graus de
liberdade é usada para determinar um número independente de parâmetros que
definem uma configuração qualquer. Reduzindo a área de estudo para os
manipuladores robóticos, temos que os graus de liberdade são os delimitadores de
movimentos de um manipulador em um espaço bidimensional ou tridimensional. Para
fazer os movimentos (graus de liberdade) são utilizados motores, neste protótipo
foram utilizados servomotores.
2.1.2 – Servomotor
Servomotor é uma máquina elétrica que converte energia elétrica em energia
mecânica. Os três tipos de servomotores mais utilizados são:
- servomotores de corrente continua;
- corrente alternada síncronos;
- corrente alternada assíncronos.
9
A utilização de um determinado tipo de servomotor com seu respectivo
servoconversor depende de vários critérios, tais como: dinâmica, torque máximo,
capacidade de sobrecarga, velocidade, manutenção, regime de trabalho, preço entre
outros.(FAVRETTO-2010)
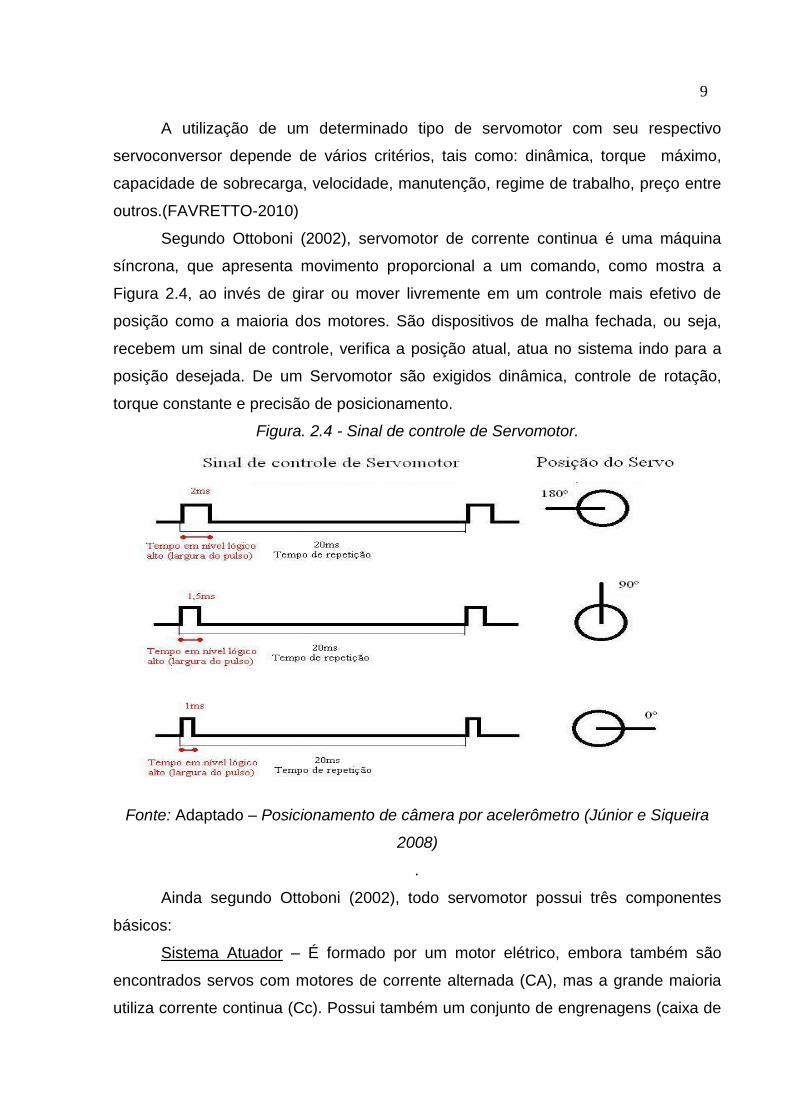
Segundo Ottoboni (2002), servomotor de corrente continua é uma máquina
síncrona, que apresenta movimento proporcional a um comando, como mostra a
Figura 2.4, ao invés de girar ou mover livremente em um controle mais efetivo de
posição como a maioria dos motores. São dispositivos de malha fechada, ou seja,
recebem um sinal de controle, verifica a posição atual, atua no sistema indo para a
posição desejada. De um Servomotor são exigidos dinâmica, controle de rotação,
torque constante e precisão de posicionamento.
Figura. 2.4 - Sinal de controle de Servomotor.
Fonte: Adaptado – Posicionamento de câmera por acelerômetro (Júnior e Siqueira
2008)
.
Ainda segundo Ottoboni (2002), todo servomotor possui três componentes
básicos:
Sistema Atuador – É formado por um motor elétrico, embora também são
encontrados servos com motores de corrente alternada (CA), mas a grande maioria
utiliza corrente continua (Cc). Possui também um conjunto de engrenagens (caixa de

10
redução) que dão maior torque ao sistema. O tamanho, torque e velocidade do motor,
material das engrenagens, liberdade de giro do eixo e consumo são características
chave para especificação de servomotores.
Sensor – É normalmente um potenciômetro solidário ao eixo do servo. O valor
de sua resistência elétrica indica a posição angular em que o eixo se encontra.
Circuito de controle – É formado por componentes eletrônicos discretos ou
circuitos integrados e geralmente é composto por um oscilador e um controlador PID
(controle proporcional integrativo e derivativo) que recebe um sinal de sensor
(posição do eixo) e o sinal de controle aciona o motor no sentido necessário para
posicionar o eixo na posição desejada.
Os Servomotores possuem três fios de interface: dois de alimentação e um de
sinal de controle, conforme Figura 2.5. Para controlar os servomotores foi utilizado o
controle PWM.
Figura 2.5 – Servomotor.
Fonte: Os Autores.
2.1.3 - Controle PWM
PWM é a sigla para Modulação por Largura de Pulso, ou do inglês Pulse Width
Modulation, técnica que permite o controle da velocidade dos motores, mantendo o
torque ainda que em baixas velocidades, garantindo partidas suaves mesmo quando
há uma carga maior sobre os motores. Aspecto que caracterizam o controle PWM
como ideal para aplicações em robótica. PWMs são por definição sistemas de
Freqüência (F) e Período (P) constantes e de Largura de Pulso (ciclo ativo) ajustável.
(SILVA, 2007). De uma maneira mais simples, esta técnica pode ser explicada como:
utilizando bases de tempo, é possível ligar e desligar uma porta tão rapidamente que

11
para os olhos humanos parece estar sempre ligado, e o que muda é a intensidade
com a qual a porta está ligada, conforme Figura 2.6.
Figura 2.6 – Potência do Duty Cycle (Ciclo Ativo).
Fonte: Apostila RoboCore Arduino Kit Iniciante V5.0.
O período é fixo. Por exemplo, se o período for de dez milisegundos e ligar o
PWM em cinqüenta por cento (50%), ou seja, cinco milisegundos ligado e cinco
milisegundos desligado, a lâmpada (ilustrada pelo raio amarelo) será vista acessa
com metade da intensidade luminosa que teria se deixasse a lâmpada ligada os dez
milisegundos. Existe um tempo de varredura, que quando um período chega ao fim,
outro começa instantaneamente e a lâmpada permanece ligada, conforme a Figura
2.7. (APOSTILA ROBOCORE – 2012).
Figura 2.7 – PWM com 50% - Vários ciclos com uma varredura muito rápida.
Fonte: Apostila RoboCore Arduino Kit Iniciante V5.0.

12
Como o tempo que isso ocorre é muito rápido não é possível enxergar a
lâmpada ligar e desligar. Mas, se tivesse um período de dez segundos, e a lâmpada
ficasse acessa cinco segundos e apagada por outros cinco segundos, seria possível
ver o tempo acesso e apagado, pois os olhos humanos conseguem distinguir o que
são cinco segundos, mas não o que são cinco milisegundos. (APOSTILA
ROBOCORE – 2012).
Conforme Ghirardello (2002) Este princípio é utilizado justamente para controle
PWM: Modulando (variando) a largura do pulso de modo a controlar o ciclo ativo do
sinal aplicado a uma carga e, com isso, a potência aplicada a ela.
Ainda conforme Ghirardello (2002), as aplicações do controle por PWM são
diversas e abrange tanto uso industrial como doméstico. Nas indústrias, o PWM pode
ser usado para controlar elevadores de carga, esteiras rolantes e guinchos. No uso
doméstico, podem ser utilizados para controle de iluminação, portões, cortinas.
2.1.4 – CLP – Controlador Lógico Programável
Segundo Franchi e Camargo (2011) Controlador lógico programável (CLP) ou
da sigla inglesa PLC (Programmable logic controller), é um computador
especializado, baseado em um microprocessador que desempenha funções de
controle através de softwares desenvolvidos pelo usuário, de diversos tipos e níveis
de complexidade. Normalmente as famílias dos CLP’s são definidas pela capacidade
de processamento de um determinado número de pontos de entradas e/ou saídas.
2.1.4.1 – Arquitetura de um CLP
De acordo com a Figura 2.8, um CLP pode ser dividido em:
Fonte de Alimentação
Processador (CPU)
Memória de Programa
Memória de Dados
Módulos de entrada e saídas
Podem ser construídos no CLP ou módulos de plug in separados
Barramento do CLP (FRANCHI E CAMARGO 2011)

13
Figura. 2.8 - Arquitetura de um CLP Modular.
Fonte: Franchi e Camargo (2011).
2.1.4.2 – Descrição de um CLP
Um CLP possui dispositivo para conectar-se com outros equipamentos
externos, o que permite o recebimento e/ou o envio de variáveis de entrada ou
variáveis de saída. É capaz de realizar operações dedicadas de automação, tais
como controle e supervisão de processos específicos. Além disso, o CLP foi
idealizado para suportar as condições mais adversas de uma industria, como por
exemplo: ruído, temperatura, eletromagnetismo, poeira entre outros. (ROSÁRIO,
2011) (FRANCHI E CAMARGO, 2011).
2.1.4.3 - Vantagens dos CLPs
De uma maneira geral, a arquitetura dos CLPs é flexível e modular, permitindo
que elementos de hardware sejam expandidos de acordo com o necessário pela
aplicação. (FRANCHI E CAMARGO, 2011).
A Tabela 2.1 lista uma série de benefícios obtidos com o uso de CLPs.

14
Tabela 2.1 – Características e benefícios do CLP.
Características Benefícios
Componentes de estado sólido Alta confiabilidade
Memória programável Simplicidade de modificações
Controle flexível
Pequeno tamanho Requer pouco tamanho
Baseado em microprocessador Capacidade de comunicação
Alto nível de performance
Produtos de alta qualidade
Capacidade multifuncional
Contadores e temporizadores
em software
Eliminação de hardware
Fácil alteração
Controle de relé por software Redução de custos com fiação
Diminuição de espaço necessário
Arquitetura modular Flexibilidade de instalação
Instalação fácil
Custo de hardware reduzido
Expansibilidade
Variedade de interfaces de I/O Controle de uma variedade de
dispositivos
Estações remotas Eliminação de longos dutos e fios
Indicadores de diagnósticos Redução do tempo de parada
Indicação de operação
Interface modular de I/O Ligação fácil
Manutenção fácil
Desconexão rápida Manutenção fácil
Fonte: Franchi e Camargo. – Controladores Lógicos Programáveis – Sistemas
Discretos (2011).
Um item fundamental para a utilização de um CLP é a seleção da linguagem
de programação a ser utilizada.

15
2.1.5 – Introdução a Programação Linguagem Ladder
Conforme Franchi; e Camargo (2011), Ladder é uma linguagem baseada na
lógica de relês e contatos elétricos para a realização de circuitos de comandos de
acionamentos. Por ser a primeira linguagem utilizada pelos fabricantes, é a mais
difundida e encontrada em quase todos os CLPs atualmente. Recebeu vários nomes
desde a sua criação, entre eles diagrama escada, diagrama de contatos e linguagem
de contatos. A linguagem Ladder foi a primeira que surgiu para a programação dos
CLP. Para que obtivesse aceitação imediata no mercado, os projetistas consideraram
que ela deveria evitar uma mudança de paradigma muito brusca. Considerando que
na época, os técnicos e engenheiros eletricistas eram normalmente os encarregados
da manutenção no chão de fábrica, a linguagem Ladder deveria ser algo familiar para
esses profissionais.
A Tabela 2.2 mostra as vantagens e desvantagens de se utilizar a
programação Ladder.
Tabela 2.2 – Vantagens e desvantagens da programação Ladder.
Vantagens de Ladder Desvantagens de Ladder
Possibilidade de uma rápida adaptação
do pessoal técnico. Sua utilização em programas extensos
ou com lógicas mais complexas é
bastante difícil.
Possibilidade de aproveitamento do
raciocínio lógico na elaboração de um
comando feito com reles.
Fácil composição do diagrama original
a partir do programa de aplicação. Programadores não familiarizados com
a operação de relés tendem a ter
dificuldades com essa linguagem.
Documentação fácil e clara.
Técnica de programação mais
difundida e aceita industrialmente.
Símbolos padronizados e
mundialmente aceitos pelos fabricantes
e usuários.
Edição mais lenta.
Fonte: Adaptado de Franchi; de Camargo (2011).

16
A principal função de um programa em linguagem Ladder é controlar os
acionamentos de saídas (motores, Led’s, etc), dependendo da combinação lógica
dos contatos de entrada (botões, sensores, etc).
2.1.6 – Sensor Indutivo
Segundo Thomazini e Albuquerque (2011), Sensores Indutivos são
dispositivos de proximidade sem contato que utilizam um campo de freqüência de
rádio com um oscilador e uma bobina. A presença de um objeto altera esse campo e
o circuito eletrônico do sensor pode descobrir a alteração. Um sensor indutivo é
formado de um circuito oscilador LC (composto por um indutor e um capacitor em
paralelo), um comparador de sinal e um chaveador. A bobina do circuito oscilador
gera um campo eletromagnético, que é emitido a face do sensor.
Ainda segundo Thomazini e Albuquerque (2011), quando um objeto metálico
passa a frente do sensor ele é detectado. Essa detecção é feita através da incidência
de um campo eletromagnético oscilante sobre o espaço conforme Figura 2.9, quando
um metal entra nesse campo, ele absorve parte do campo tornando-o mais fraco.
Essa “perda de força” do campo é detectada pelo circuito eletrônico do sensor que
transforma em um sinal de saída, que dependendo do tipo pode ser de um contato
NA (normalmente aberto) ou NF (normalmente fechado) para corrente alternada ou
contínua, um transistor ou ainda um sinal variável de tensão ou de corrente (saída
analógica).
Figura 2.9 – Detalhes da Bobina dos Sensores Indutivos.
Fonte: Adaptado de Thomazini; de Albuquerque (2011).

17
Esse tipo de sensor é principalmente aplicado para substituir chaves tipo fim
de curso, pois oferecem maior vantagens em relação a essas chaves tradicionais. A
maior vantagem é dada pelo fato deste sensor não necessitar de um contato físico
para atuar, ou seja, a detecção é realizada com uma simples aproximação do objeto.
Isso proporciona maior durabilidade, alta velocidade de comutação e maior nível de
confiabilidade se comparar com as chaves fim de curso. Há também aplicações que
só são possíveis com o uso desse tipo de sensor, como por exemplo, para contar
peças, medir velocidade, detectar material de baixa resistência mecânica, entre
muitas outras. (THOMAZINI E ALBUQUERQUE, 2011).
2.1.7 - Software Supervisório
Software supervisório ou software de supervisão é uma ferramenta de
desenvolvimento de aplicativos que se presta a fazer a comunicação entre um
computador e uma rede de automação, e que traz ferramentas padronizadas para
construção de interfaces entre o operador e o processo.
No protótipo foi utilizado o software Rsview 32, conforme Figura 2.10.
Figura 2.10 – Software Rsview.
Fonte: Os autores.

18
3 – MATERIAL E MÉTODOS
Baseado nos princípios estudados foi desenvolvido um Protótipo composto
por três partes: o manipulador robótico, programação da placa de controle dos servos
e o CLP que irá controlar todo o sistema através do Software Supervisório (IHM).
Com o estudo de diversos tipos de manipuladores, analisando cada item
(conceitos básicos), optou-se por construir um manipulador cilíndrico, utilizando um
trilho de impressora para reduzir custos, no formato RPP, com dois graus de
liberdade e uma garra robótica, um protótipo experimental, para demonstrar o
transporte de peças, a integração do sistema supervisório, CLP e o microcontrolador.
Para construção do protótipo foi utilizado o CLP da Allen Bradley Micrologix
1000, que é responsável por toda a lógica de controle do sistema, é o CLP que
recebe e processa os dados emitindo sinais de saída. Três servomotores, que
movimentam a estrutura do manipulador robótico. Uma garra robótica MKII, para
pegar as peças. Uma placa controladora de servos, que é responsável pelo controle
dos servomotores, através de PWM. Sensor indutivo, responsável pela verificação da
existência ou não de peças. Quatro chave fim de curso, utilizado para limitar o curso
do elevador e a rotação do corpo do manipulador. Um trilho de impressora (corpo do
manipulador). Oito borne relês, utilizados para proteção das saídas do CLP. Fios,
para interligação de todo o circuito.
No inicio do desenvolvimento deste projeto, foi feito um cálculo de gasto
estimado em aproximadamente dois mil reais (R$ 2000,00), no qual está incluso o
metal para fazer o corpo, garra e suporte do manipulador, servomotores, mão de obra
pra usinagem das peças, dentre outros. A idéia original era construir o corpo do
manipulador feito de metal, mas devido ao alto custo de material (aço) e usinagem do
mesmo, foi necessário o estudo de outros materiais, como por exemplo, o acrílico,
nylon, madeira, e suas respectivas viabilidade. Por fim teve-se a idéia e a criatividade
de fazer o corpo do manilpulador com trilho de impressora, por ser um item pré-
existente e reaproveitar materiais (reciclagem), além de reduzir o custo do projeto
substancialmente, se obteve também um ganho de tempo, com isso foi possível
implementar o projeto original com o uso do CLP, o software supervisório e a
utilização de sensor indutivo e chave fim de curso. O protótipo foi finalizado com um
gasto aproximado de apenas duzentos e cinqüenta reais (R$ 250), conforme
Apêndice A – Gastos protótipo real. O custo do projeto foi reduzido substancialmente,

19
por se utilizar peças recicladas, e já possuir alguns produtos. Mas o gasto real, caso
fosse necessário comprar todas as peças, seria em torno de mil e quinhentos reais
(R$1500,00), conforme Apêndice B – Gastos protótipo.
As dificuldades encontradas no decorrer da elaboração do protótipo foram
várias, tais como acoplar os servomotores no trilho da impressora, como diminuir o
atrito do corpo do manipulador com a base, como estabilizar o trilho, pois este
balançava muito ao se movimentar, fixar a garra robótica ao corpo do manipulador,
acoplar o sensor capacitivo na garra robótica, programação Ladder, programação
para controle dos servomotores, dentre outros.
Através de pesquisas em livros, internet e na própria instituição de ensino, foi
possível contornar todas as dificuldades encontradas no decorrer do
desenvolvimento do protótipo. O corpo do manipulador, a principio balançava muito
ao se movimentar, devido ao peso da garra. Foi necessário modificar o local da garra
para balancear o peso do corpo do manipulador, e também o acoplamento de um CD
na base do manipulador, tanto para diminuir o atrito do manipulador com a base,
como também para melhorar o ponto de equilíbrio do manipulador. Outro problema
encontrado foi à fixação da garra e do sensor indutivo, ambos resolvidos com
adaptações de peças de acrílico para a fixação tanto da garra como do sensor
indutivo nos locais adequados. Na programação do microcontrolador de servomotor,
houve dificuldade na lógica de interligação do microcontrolador com o CLP, que foi
resolvido com testes, até atingir o resultado esperado para o bom funcionamento do
protótipo.
Outra dificuldade encontrada no decorrer do desenvolvimento do protótipo, foi
como limitar o curso do servomotor de rotação continua, já que este não possui um
ponto de referência como os servomotores convencionais de 180º (cento e oitenta
graus), a solução encontrada foi a utilização de dois sensores chave fim de curso, um
na parte superior do trilho (corpo do manipulador), e outro na parte inferior do trilho,
para limitar o percurso da garra, senão o servomotor de rotação continua ficaria
funcionando sem parar, até que este fosse desligado, e com o sensor chave fim de
curso, junto com a programação foi obtido um bom resultado, para esse problema.
No protótipo, conforme Figura 3.1, utilizou-se um trilho de impressora, para ser
o corpo do manipulador, com a função de transportar um material de um local para
outro. Com o uso de três servomotores, sendo dois servomotor da marca Futaba Mg

20
995 e um servomotor médio 360º rotação continua SPRINGRC. O servo Futaba tem
um torque especificado no datasheet de 15 Kgf.cm. O torque necessário para
movimentar o manipulador é de T = 0.1617 N.m, isso equivale a 1.648 Kgf.cm,
conforme os cálculos de dimensionamento que se encontra no Apêndice C –
Dimensionamento de servomotores. O servomotor utilizado possui um torque de
T=1.47 N.m, nesse tipo de manipulador. Foi utilizado esse servomotor por causa do
baixo preço e também para superdimensioná-lo, para não haver o risco do mesmo
não possuir torque suficiente para movimentar o manipulador.
Figura 3.1 – Protótipo manipulador robótico.
Fonte: Os Autores.

21
A programação da placa controladora, que é responsável pelo controle dos
servomotores (controle PWM), encontra-se no Apêndice D – Programação Arduino,
ocorreu sem muitos problemas.
Na sequência encontra-se uma explicação sobre alguns conceitos da
programação do arduino, que é baseado na linguagem C e C++.
#include <Servo.h> Inclui a biblioteca servo na programação.
const int Declara pino tipo entrada.
const int servo Declara pino tipo saída.
int ângulo Controle de posição do eixo.
void setup() Declara.
digitalWrite Declara que irá escrever na entrada.
O CLP foi utilizado para otimizar todo o sistema, sendo responsável por toda a
lógica de controle. O software supervisório faz a integração Homem-máquina (IHM),
permitindo que se possa obter o controle a distância. Com o ganho de tempo devido
a utilização do trilho de impressora para o corpo do manipulador, foi possível a
implementação do protótipo com o CLP e o software supervisório. O uso do CLP,
também foi de grande utilidade para fazer a interligação entre o software supervisório
e a placa controladora de servomotor, e também para a utilização dos sensores, pois
não seria possível o uso dos sensores na placa controladora de servos, pois esta
possui um número limitado de entradas e saídas, que no caso deste protótipo, já
estavam todas utilizadas, com os servomotores.
Toda a lógica contida neste projeto foi desenvolvida através da linguagem
Ladder, conforme Apêndice E – Programação CLP, o que propiciou otimizar de forma
garantida o funcionamento do protótipo. Através de sinais de feedback (respostas
dos sensores, fim de cursos, etc) o manipulador executa as ações comandadas pelo
CLP, o qual processa a programação Ladder que esta gravada em sua memória
atuando sobre as saídas do CLP. Toda a programação foi feita no software RSLogix
500 Pro, que se encontra na Figura 3.2.

22
Figura 3.2 – Software RSLogix 500 Pro.
Fonte: Os Autores.
Para desenvolvimento do programa, utilizou-se entradas e saídas digitais
físicas (CLP), bits de memória, temporizadores entre outras ferramentas do
programa. Os bits auxiliares têm como finalidade auxiliar nas criações das lógicas
facilitando a programação.
No protótipo optou-se por utilizar o sistema supervisório, conforme Figura 3.3,
pois possibilita monitorar o que esta acontecendo em tempo real, facilitando muito a
visualização do funcionamento do manipulador. No sistema supervisório encontra-se
as botoeiras responsáveis pelos acionamentos como o liga/desliga, reset, botão de
emergência, controle manual para movimentar os eixos no modo manual, encontra-
se também uma janela que mostra em tempo real a movimentação do manipulador,
indica status das entradas e saídas do CLP, gera ícones indicando possíveis falhas,
alarmes decorrentes no processo.

23
Figura 3.3 – Sistema Supervisório (IHM).
Fonte: Os Autores.
O protótipo funcionará a partir de uma necessidade estabelecida, neste caso o
manipulador pegará a peça em um local e ira transporta-la a outro local estabelecido.
Primeiramente o operador terá de pressionar o botão “Inicio de processo”, com isso o
elevador subirá a garra até a altura máxima, sendo limitado pelo sensor chave fim de
curso, que mandará um sinal para o CLP, e este desligará o motor. Em seguida o
servomotor localizado na base do manipulador, moverá o corpo no sentido ciclo de
carga (sentido horário), sendo limitado pelo incremento de ângulos gerado pelo
servomotor, o qual é coletado pela placa microcontroladora.
Foram utilizadas duas chaves fim de curso, fixadas na base do manipulador,
que tem por finalidade enviar um feedback (sinal de resposta) para o CLP. Na
seqüência a garra será aberta sendo este o ponto inicial do processo, e ficará em
aguardo do operador para “inicio de produção” (Start Auto). Após o operador iniciar a
produção, o elevador desce para pegar a peça, novamente o limite de altura mínimo
será delimitado pelo sensor chave fim de curso, a qual é confirmada sua presença ou
não, pelo sensor indutivo, que quando não confirmada, o elevador retorna ao estado
inicial de carga, e fica aguardando o inicio de ciclo novamente, este deve ser
acionado pelo operador, na interface de operação. Quando a peça é confirmada, o
servomotor da garra é acionado, e a garra fecha, pegando a peça. O elevador sobe,

24
o corpo gira em sentido anti-horário, entrando em ciclo de descarga. No ciclo de
descarga o elevador desce, a garra abre, liberando a peça. E em seguida retornando
ao estado inicial, repetindo os ciclos continuamente até o cancelamento da operação,
ou devido a falta de peças.
A movimentação do manipulador poderá também ser feita manualmente,
selecionando a opção “Manual”, na interface de operação. Podendo também ser
monitorado a quantidade de operações realizadas no dia, ou em determinado
período.
No diagrama elétrico, que se encontra no Apêndice F – Diagrama elétrico, foi
utilizado CLP, placa microcontroladora de servos, borne relês, fios, servomotores,
sensores e chave fim de curso.
4 – RESULTADOS
O resultado esperado foi obtido, que foi demonstrar o funcionamento de um
manipulador robótico para pegar e transportar produtos de um lugar para outro, junto
com um sistema integrado utilizando CLP, software supervisório, e uma placa
microcontroladora de servomotores, através de controle PWM. Podemos concluir
também que pode ser viável, o reaproveitamento (melhoramento) de máquinas na
indústria, por um preço reduzido. Ao invés de se comprar uma nova máquina, pode
ser mais viável economicamente adaptar (melhorar) uma máquina pré-existente, por
um custo muito mais baixo do que a aquisição de uma nova máquina, trazendo
economia e produtividade para a empresa.
Ao inicio do projeto foi feito uma estimativa de custo (custo A), e ao termino da
construção do protótipo foi obtido uma redução (custo B) de aproximadamente vinte e
nove por cento (29%), entretanto, devido a reutilização e reciclagem de materiais
obteve-se uma redução de gastos (custo C) de aproximadamente oitenta e nove por
cento (89%) em relação ao custo A.
5 - CONCLUSÃO
O objetivo do trabalho foi atingido, que foi desenvolver um manipulador
robótico autônomo, capaz de mover as peças de um local para o outro, sem a
intervenção humana, com o auxilio de sensores, atuadores, softwares. Ganhando
qualidade, produtividade, redução de custo, aumento da competitividade, dentre

25
outros. Pois no mundo atual com a globalização, e constante aperfeiçoamento da
tecnologia. As indústrias buscam sempre otimizar a produção, visando melhoria da
produtividade, da qualidade, das condições de segurança e qualidade de vida que a
utilização de manipuladores robóticos traz, com isso os Tecnólogos em Mecatrônica
Industrial precisam sempre buscar conhecimento, para poder suprir a necessidade do
mercado de trabalho, e por isso foi de suma importância a pesquisa para a criação
deste trabalho.
Referências
ARMADA, M.A, Controle de Robots. XV Curso de Automática em la Industria.
Aguadulce, Jun.1995.
CARRARA, Prof. Valdemir. Apostila de Robótica. Mogi Das Cruzes: Universidade
Braz Cubas, 2008. Disponível em:
<http://www2.dem.inpe.br/val/homepage/cursos/rb_apostila.pdf>. Acesso em: 01 set.
2013.
BARRIENTOS, A,; Penin,L.F.B.C. Fundamentos de Robótica, 1 edn, MacGraw Hill,
1997.
FAVRETTO, Jaime. Servo acionamentos. Ponta Grossa: UTFPR, 2010. Disponível
em: <http://pessoal.utfpr.edu.br/favretto/arquivos/Servoacionamentos.pdf>. Acesso
em: 01 set. 2013.
FERRARI, Daniel Gomes; ETO, Regina Mayumi. Mundo da Robótica.Maringá: Din -
Uem, 2010. Disponível em: <http://www.din.uem.br/ia/robotica/index.htm>. Acesso
em: 21 ago. 2013.
FRANCHI, C.L.; DE CAMARGO, V.L.A. Controladores Lógicos Programáveis –
Sistemas Discretos – Editora Érica – 2a Edição 4a Reimpressão (2011)
FRANCHIN, Prof. Marcelo N.. Braço Mecânico. Bauru: Unesp Bauru, 1999.
Disponível em: <http://www.dee.feb.unesp.br/~marcelo/robotica/Robot3.htm>. Acesso
em: 10 maio 2013.
FRANCO, Rafael. Manipuladores: As ferramentas utilizadas na robótica. São Paulo:
Rfranco.org, 2013. Disponível em:
<http://www.rfranco.org/2013/05/08/manipuladores/>>. Acesso em: 21 maio 2013.
GEORGINI, J.M. Elementos para estruturação e implementação de sistemas
automatizados de produção. Dissertação de mestrado – Faculdade de Engenharia
Mecânica, Unicamp, Campinas, 1999

26
GHIRARDELLO, Prof. Ariovaldo. Apostila sobre modulação PWM.Americana:
Colégio Politec, 2002. 6 p. Disponível em:
<http://www.eletronica.org/arq_apostilas/apostila_pwm.pdf>. Acesso em: 20 set.
2013.
OTTOBONI, Augusto. Servo acionamentos. 6. ed. São Paulo: Saber, 2010.
Disponível em: <http://w3.ufsm.br/fuentes/index_arquivos/servo.pdf>. Acesso em: 1
set. 2013.
ROBOCORE. Arduino Kit Iniciante V5.0. 5. ed. São Paulo: Robocore, 2012. 47 p.
ROSÁRIO, J.M. Automação Industrial – Editora Baraúna – 2009
ROSÁRIO, João Mauricio. Princípios de Mecatrônica. 6ª São Paulo:
Pearson Prentice Hall, 2011. 356 p.
SILVA, F.S.; MEGGIOLARO,M. A. Desenvolvimento e controle de um
manipulador robótico de alta potência com dois graus de liberdade. Dissertação
(Mestrado) – Pontifícia Universidade Católica do Rio de Janeiro, 2006.
SILVA, RENATO A. Programando microcontroladores PIC – Linguagem C –
Editora Ensino Profissional – (2007)
THOMAZINI, Daniel; ALBUQUERQUE, Pedro Urbano de. Sensores
Industriais: Fundamentos e aplicações. 8ª São Paulo: Érica, 2011. 222 p.
VELOSO JR, Adalberto; DE SIQUEIRA, Rodolfo Barbosa. Posicionamento de
câmera por acelerômetro, Engenharia Elétrica – PUCPR. Disponível em:
<http://www.ppgia.pucpr.br/~santin/ee/2008/3/> Acesso em: 01 set. 2013.

27
Apêndice A
Gastos Protótipo Real
Servo motor Futaba Mg 995 2 x R$ 38,40 ................. R$ 76,80
Servo motor médio 360º SPRINGRC (SM-S3317S ) ................ R$ 70,00
Garra Robótica MK II ............................................................ R$ 58,60
Acrílico ........................................................................................ R$ 5,00
Trilho impressora .......................................................................... R$ -----
Madeira ........................................................................................ R$ -----
CLP Micrologix 1000 .................................................................... R$ -----
Arduino ......................................................................................... R$ -----
Chave fim de curso 4 x R$ 4,00 ................... R$ 16,00
Sensor Indutivo ...................................... ..................................... R$ -----
Borne relê ............................................... 8 x R$ 00,00 ................. R$ -----
Cabos ........................................................................................... R$ -----
Parafusos ..................................................................................... R$ -----
Outros .......................................................................................... R$ 20,00
Total ............................................................................................ R$ 246,40

28
Apêndice B
Gastos Protótipo
Servo motor Futaba Mg 995 2 x R$ 38,40 ................. R$ 76,80
Servo motor médio 360º SPRINGRC (SM-S3317S ) ................ R$ 70,00
Garra Robótica MK II ............................................................ R$ 58,60
Acrílico ........................................................................................ R$ 5,00
Trilho impressora .......................................................................... R$ 50,00
Madeira ........................................................................................ R$ 15,00
CLP Micrologix 1000 .................................................................... R$ 800,00
Arduino ......................................................................................... R$ 50,00
Chave fim de curso 4 x R$ 4,00 ................... R$ 16,00
Sensor Indutivo ...................................... ..................................... R$ 80,00
Borne relê ............................................... 8 x R$ 25,00 ................. R$ 200,00
Cabos ........................................................................................... R$ 10,00
Parafusos ..................................................................................... R$ 5,00
Outros .......................................................................................... R$ 20,00
Total ............................................................................................ R$ 1456,00

29
Apêndice C
Dimensionamento de Servomotores
F = P x a T = F x D/2 x 10 ˉ ³
F = Força (N) T = Torque (N.m)
P = Peso (Kg) F = Força (N)
A = Aceleração da gravidade (m/s²) D = diâmetro (mm)
Cálculo de Força Cálculo de Torque
F = P x a T = F x D/2 x 10 ˉ ³ F = 3 x 9.8 T = 29.4 x 11/2 x 10 ˉ ³
F = 29.4 N T = 29.4 x 5.5 x 10 ˉ ³
T = 161.7 x 10 ˉ ³
T = 0.1617 N.m
1Kgf.m = 9.8066 N.m 1Kgf.m = 9.8066 N.m
x = 0.1617 N.m 0.15 Kgf.m = x
x = 1.166/9.8066 x = 1.47099 N.m
x = 0.01647 Kgf.m
0.01647 Kgf.m x 100 = 1.648 Kgf.cm
É necessário um servomotor com torque mínimo de 1.648 kgf.cm ou
0.1617 N.m
Torque máximo do servomotor utilizado = 15 Kgf.cm ou 1.47099 N.m

30
Apêndice D
Programação ARDUINO #include <Servo.h>
const int giracorpoh = 2; // pino de entrada do comando gira horário
const int giracorpoa = 4; // pino de entrada do comando gira anti-horário
const int sobecarro = 7; // pino de entrada do comando sobe carro
const int descecarro = 8; // pino de entrada do comando desce carro
const int abregarra = 9; // pino de entrada do comando abre garra
const int fechagarra = 10; // pino de entrada do comando fecha garra
const int servo1 = 3; // pino de saída do servomotor_1 mov.gira corpo
const int servo2 = 5; // pino de saída do servomotor_2 mov. sobe/desce carro
const int servo3 = 6; // pino de saída do servomotor_3 mov.abre/fecha garra
Servo servoMotor1; // descrição do servomotor_1
Servo servoMotor2; // descrição do servomotor_2
Servo servoMotor3; // descrição do servomotor_3
int angulo1 = 90; // controla a posição do eixo_1
int angulo2 = 90; // controla a posição do eixo_2
int angulo3 = 90; // controla a posição do eixo_3
void setup() {
pinMode(giracorpoh, INPUT); // declara que este pino é uma entrada
digitalWrite(giracorpoh, HIGH); // declara que ira escrever na entrada nível alto
pinMode(giracorpoa, INPUT); // declara que este pino é uma entrada
digitalWrite(giracorpoa, HIGH); // declara que ira escrever na entrada nível alto
pinMode(sobecarro, INPUT); // declara que este pino é uma entrada
digitalWrite(sobecarro, HIGH); // declara que ira escrever na entrada nível alto
pinMode(descecarro, INPUT); // declara que este pino é uma entrada
digitalWrite(descecarro, HIGH); // declara que ira escrever na entrada nível alto
pinMode(abregarra, INPUT); // declara que este pino é uma entrada
digitalWrite(abregarra, HIGH); // declara que ira escrever na entrada nível alto
pinMode(fechagarra, INPUT); // declara que este pino é uma entrada
digitalWrite(fechagarra, HIGH); // declara que ira escrever na entrada nível alto
servoMotor1.attach(servo1); // conecta o motor ao pino de controle
servoMotor2.attach(servo2); // conecta o motor ao pino de controle

31
servoMotor3.attach(servo3); // conecta o motor ao pino de controle
servoMotor1.write(angulo1); // gira o servo ate o ponto do meio
servoMotor2.write(angulo2); // gira o servo ate o ponto do meio
servoMotor3.write(angulo3); // gira o servo ate o ponto do meio
}
void loop()
{
if(digitalRead(giracorpoh) == LOW) // entrada ativada elevador gira sentido horário
{
if(angulo1 < 160)
{
angulo1 = angulo1 +10; // incremento angular
}
}
else
{
if(digitalRead(giracorpoa) == LOW) // entrada ativada elevador gira sentido
//anti-horário
{
if(angulo1 > 10)
{
angulo1 = angulo1 -10; // decremento angular
}
}
}
servoMotor1.write(angulo1);
delay(5);
if(digitalRead(sobecarro) == LOW) // entrada ativada carro sobe
{
if(angulo2 < 180)
{
angulo2 = angulo2 + 100; // incremento angular
}

32
}
else
{
if(digitalRead(descecarro) == LOW) // entrada ativada carro desce
{
if(angulo2 > 0)
{
angulo2 = angulo2 - 100; // decremento angular
}
}
}
servoMotor2.write(angulo2);
delay(5);
if(digitalRead(abregarra) == LOW) // entrada ativada abre a garra
{
if(angulo3 < 120)
{
angulo3 = angulo3 + 5; // incremento angular
}
}
else
{
if(digitalRead(fechagarra) == LOW) // entrada ativada fecha a garra
{
if(angulo3 > 20)
{
angulo3 = angulo3 - 5; // decremento angular
}
}
}
servoMotor3.write(angulo3);
delay(5);
}

33
Apêndice E
Programação CLP
Programação Ladder – Principal

34
Programação Ladder – Lógica

35

36

37
Programação Ladder – Saídas

38
Programação Ladder – Entradas

39
Apêndice F
Diagrama Elétrico





























