-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
1/16
Phil. Trans. R. Soc. A (2010) 368,
21892204doi:10.1098/rsta.2010.0032
Synchronization engineering: tuning the phaserelationship
between dissimilar oscillators using
nonlinear feedback
BY CRAIG G. RUSIN1,*, HIROSHI KORI2, ISTVN Z. KISS3AND JOHN L.
HUDSON1
1Department of Chemical Engineering, University of Virginia,
Charlottesville,VA 22902, USA
2Division of Advanced Sciences, Ochadai Academic
Production,Ochanomizu University, Tokyo 112-8610, Japan
3Department of Chemistry, Saint Louis University, St Louis, MO
63103, USA
A mild, nonlinear, time-delayed feedback signal was applied to
two heterogeneousoscillators in order to synchronize their
frequencies with an arbitrary and controllablephase difference. The
feedback was designed using phase models constructed
fromexperimental measurements of the intrinsic dynamical properties
of the oscillators. Thefeedback signal produced an interaction
function that corresponds to the desired collectivebehaviour. The
synchronized phase difference between the elements can be tuned to
anyvalue on the interval 0 and 2p by shifting the phase of the
interaction function using thefeedback delay. Numerical simulations
were conducted and experiments carried out with
electrochemical oscillators.Keywords: synchronization; phase
models; nonlinear feedback
1. Introduction
The collective dynamical behaviour of a rhythmic population is
dependent onthe interactions between individual elements. Coupling
among rhythmic elementscan lead to synchronization, where a number
of rhythmic elements organize into asingle group with a uniform
phase and frequency. Such synchronization can lead tocoherent light
emission from laser systems (Petrov et al. 1997; Oliva &
Strogatz2001), neuronal clustering in the suprachiasmatic nucleus
(Iglesia et al. 2000;Yamaguchi et al. 2003), oscillations in
chemical systems (Epstein & Pojman 1998),epileptic events
(Traub & Wong 1982) and Parkinsonian tremors (Tass 1999).
By manipulating the interactions between individual elements, it
is possibleto steer the collective behaviour of the system to a
desired state. A number ofmethods have been developed to control
the collective behaviour of rhythmicsystems (Battogtokh &
Mikhailov 1996; Popovych et al. 2006).
Proportionalintegralderivative controller-based feedback has been
used to create phase-lockedstates (Di Donato et al. 2007), feedback
based on mutual information has been
*Author for correspondence ([email protected]).
One contribution of 10 to a Theme Issue Experiments in complex
and excitable dynamical systems.
This journal is 2010 The Royal Society2189
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
mailto:[email protected]:[email protected]://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/mailto:[email protected]
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
2/16
2190 C. G. Rusin et al.
shown effective in controlling the characteristic time scales of
oscillators (Belykhet al. 2005) and tunable heterogeneities have
been used to steer the behaviour ofexcitable media (Mikhailov &
Showalter 2006).
We have developed a general engineering methodology based on
phase modelsthat allows precise control over the collective
dynamical behaviour of a rhythmic
system using global nonlinear time-delayed feedback. A key
advantage of thismethod is that it can be tailored to the unique
dynamical behaviour of a physicalsystem. This is accomplished by
using experimental measurements to calibratethe phase model to the
target system, eliminating the need for physico-chemicalmodels.
Mild feedback is used to gently steer the collective behaviour of
thetarget system towards the desired state, ensuring that the
rhythmic behaviourof the individual elements of the system is
preserved. This method has beenused to generate dynamical
behaviours such as phase synchronization, phasedesynchronization,
clustering and itinerant clustering within a population ofrhythmic
electrochemical elements (Kiss et al. 2007; Kori et al. 2008).
In this paper, we use our methodology to address the general
question ofhow to tune the stationary phase difference between two
dissimilar oscillatorswithout prior knowledge of their underlying
dynamic behaviour. This two-oscillator system represents a
canonical model for a large class of rhythmicbiological systems
(Winfree 1980; Iglesia et al. 2000) and incorporates manyof the
non-idealities that are present in typical experimental systems,
yethas a simple analytical solution. Heterogeneities are common in
experimentaland natural rhythmic systems where the intrinsic
oscillator frequency is notunder experimental control. We
demonstrate how to choose and obtain aninteraction function that
produces an arbitrary phase difference between two
rhythmic elements, and we demonstrate the application of the
method using anexperimental chemical system.
2. General methodology
The phase behaviour of a population of oscillating elements can
be approximatedin the limit of weak global interactions as
(Kuramoto 1984)
dfidt
=ui +K
N
N
j=1H(fj fi), (2.1)
where fi and ui are the phase and inherent frequency of element
i, K is theinteraction strength, N is the number of elements in the
population and H(Df)is an interaction function that describes the
effect one element has on all otherelements in the system. The
interaction function can be derived from measurablequantities of
the experimental system as
H(Df)=1
2p
2p0
Z(f)h
x(f+ Df)
df, (2.2)
where Z(f) is the response function, x(f) is the waveform and
h(x) is the coupling
function between the elements. The response function, Z(f),
represents thesensitivity of a single element to perturbations
along its limit cycle. This functionis an intrinsic property of the
oscillator and can be experimentally measured
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
3/16
Synchronization engineering 2191
(Galan et al. 2005; Kiss et al. 2005; Tsubo et al. 2007). The
coupling function,h(x), represents the form of the physical
connection between the elements inthe system. For the simulations
and experiments described in this work, theinteractions among
elements are produced by global nonlinear time-delayedfeedback of
the form
h(x(t))=S
n=0
knx(t tn Dt)n, (2.3)
where t is the time, S is the polynomial feedback order, kn is
the nth orderpolynomial feedback coefficient, tn is the nth order
polynomial feedback delay andDt is a feedback delay that is common
to all polynomial terms. By manipulatingthe shape of the
interaction function, it is possible to control the
collectivebehaviour of the system. In general, this can be
accomplished using a three-stepprocess: determine a target
interaction function that will produce the desired
global behaviour, measure the response function of the rhythmic
elements to beused and numerically optimize the shape of the
coupling function to achieve thetarget interaction function.
3. Tuning the phase difference between two rhythmic elements
(a) Determining the required interaction function
Applying the Kuramoto phase approximation (equation (2.1)) to a
system of
two non-identical elements yields equations for the two phase
variables{f
1,f
2}
which when subtracted give a relationship for the phase
difference, Df= f1 f2,between the elements
dDfdt
=Du+K
2[H(Df) H(Df)], (3.1)
where Du is the difference between the natural frequencies of
the two oscillators.Equation (3.1) can be simplified to
dDfdt
=Du KH(Df), (3.2)
where H is the odd part of the interaction function, defined
as
2H(Df)=H(Df) H(Df). (3.3)
From equation (3.2), it is seen that stationary solutions will
occur at phasedifferences that satisfy
Du
K=H(Df). (3.4)
For a homogeneous system (identical elements, Du= 0), the
stationary solutions
correspond to the roots of H
(Df). The behaviour of a slightly heterogeneoussystem (Du = 0)
can be brought close to that of a homogeneous system byincreasing
the interaction strength between the elements. In the limit as
K,
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
4/16
2192 C. G. Rusin et al.
the fixed point solutions approach the roots of H(Df). However,
caution mustbe used with this approach since an excessively large
interaction strength willdisrupt the waveform and invalidate the
phase approximation.
For a given interaction function H(Df), the stationary phase
difference, Df,is obtained from the roots of its odd part,
H(Df)
2H(Df)=H(Df) H(Df)= 0. (3.5)
By shifting the phase of the interaction function by an amount
Dt, Df can betuned to take on values between 0 and 1 rad/2p. (As
shall be seen below, the phaseshift, Dt, of H(Df) is equal to the
common feedback delay in the experimentsto be discussed.) The
stationary phase differences between the two oscillatingelements
are then given by the solutions of
HDf + Dt
H
Df + Dt
= 0. (3.6)
By definition, H(Df) is a 2p periodic function; therefore
equation (3.6) mustalways have roots at 0 and 0.5rad/2p. These
roots represent the trivial in-phase and anti-phase synchronization
states, respectively. The non-trivial rootsof equation (3.6) are
governed by the higher order terms ofH(Df). An interactionfunction
with second-order harmonics is sufficient to obtain a
non-trivial,stationary phase difference between the two
oscillators. A convenient form forthis purpose is the function
H(Df)= sin(Df+ Dt) + R sin(2(Df+ Dt)). (3.7)
Figure 1a illustrates the interaction function defined in
equation (3.7) settingR = 0.1 and Dt= 0, while figure 1b
illustrates its associated synchronized statesas a function ofDt.
The non-trivial bifurcation branches illustrated in figure 1bare
relatively narrow, indicating that small changes in the parameter
Dt will causelarge changes in the synchronized state. To reduce
this sensitivity, the parameterR was selected to maximize the width
of the non-trivial bifurcation branches. Tosimplify the analysis,
the parameters of equation (3.7) were constrained such thatonly
supercritical bifurcations occur.
To determine the optimum value of R, a linear stability analysis
of equation(3.2) was performed, indicating that stable stationary
states occur whendH(Df)/dDf> 0. Therefore, the phase-locked
solution, Df*, is stable if
H
(Df
+Dt
) H
(Df
+Dt
)< 0. (3.8)From this, it can be seen that the in-phase
synchronization state (Df= 0) isstable if
H(Dt)> 0, (3.9)
while the anti-phase state is stable if
H(Dt+ p)> 0. (3.10)
Equations (3.9) and (3.10) indicate that the trivial bifurcation
branchescorrespond to the region where H(Df)> 0. Since the
trivial and non-trivial
bifurcation branches are mutually exclusive, the non-trivial
branch mustcorrespond to the region where H(Df)< 0. Therefore, a
wide non-trivialbifurcation branch will occur when H(Df) has a
large domain of negative slope.
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
5/16
Synchronization engineering 2193
0
0.25
0.50
0.75
1.00
0.1 0.2 0.3
Dt(rad/2p)
Df*(ra
d/2p)
0.4 0.5
0
0.25
0.50
0.75
1.00
H(rads1)
Df*(rad/2p)
1.5
1.0
0.5
0
0.5
1.0
1.5(a) (b)
(c) (d)
Df(rad/2p)
H(rad
s1)
01.5
1.0
0.5
0
0.5
1.0
1.5
0.2 0.4 0.6 0.8 1.0
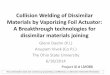
Figure 1. Relationship between H(Df) and the time asymptotic
phase behaviour of a two-oscillator system. (a) Interaction
function H(Df)= sin(Df+ Dt) + R sin(2(Df+ Dt)), R = 0.1,Dt=
0rad/2p, and (b) the calculated oscillator phase difference. Solid
lines denote stable states,
and dotted lines denote unstable states. (c) Optimized
interaction function (R = 0.5, Dt=0rad/2p) and (d) the calculated
oscillator phase difference.
The value for the parameter R of equation (3.7) was selected
tomaximize the width of the non-trivial branch of the bifurcation
diagram,that is where H(Df)< 0. The value of R was constrained
to the interval0 R 0.5 owing to the presence of subcritical
bifurcations outside thisinterval. Numerical analysis determined
that the width of the regionwhere H(Df)< 0 monotonically
increased with the value of R in this
interval. As a result, the widest non-trivial bifurcation branch
occurredwhen R = 0.5. The target interaction function can be seen
in figure 1cfor Dt= 0. With these parameters, equation (3.7) can be
analyticallysolved for H(Df)= 0, yielding Df= 0,p, arccos(cos(Dt)/
cos(2Dt)). Thestable and unstable stationary states are shown as a
function of Dtin figure 1d.
(b) Numerical simulation of phase difference tuning
Before conducting experiments on the experimental system, the
methodology
was verified with numerical simulations using the Brusselator
oscillator, a simpletwo-variable ODE system that exhibits
self-sustained oscillations (Glansdorff &Prigogine 1971). The
phase difference between two interacting Brusselator
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
6/16
2194 C. G. Rusin et al.
Z(f)
02
0
2
4
0.5
f(rad/2p)
1.0
x(f)
00.5
0
0.5
1.0(a) (b)
0.5
f(rad/2p)
1.0
Figure 2. (a) Waveform and (b) phase response function of the
Brusselator oscillator. The parametervalues are A= 1.0 and B= 2.3,
resulting in T= 6.43s and u= 0.977rads1.
oscillators is tuned to values between 0 and 2p. The dynamical
equations foran interacting homogeneous Brusselator population
under global feedback are
dxi
dt = (B 1)xi + A2
xi + f(xi, yi) +K
N
Nj=1 h(xj)
dyidt
=Bxi A2yi f(xi, yi) for i= 1, . . . , N,
f(x, y)=B
Ax2 + 2Axy+ x2y
(3.11)
where h(x) is the feedback function defined in equation (2.3)
that is constructedfrom and applied to the variables xi. The
variables xi and yi are transformedsuch that the fixed point is
shifted to (x, y)= (0,0). For a single uncoupledoscillator, a Hopf
bifurcation occurs at B=Bc 1 + A2. The parameters of
equation (3.11) were chosen to be A= 1.0 (so that Bc= 2.0) and
B= 2.3.The waveform x(f) and the response functions Z(f) along the
x-direction aredisplayed in figure 2. The response function was
calculated using the XPPAUTprogram (Ermentrout 2002).
A feedback parameter set {kn, tn} is chosen to create a tunable
non-trivialsolution such that an arbitrary stationary phase
difference Df can be achieved.The target interaction function was
selected to be equation (3.7), where R = 0.5.The phase shift of the
interaction function can be directly controlled usingthe common
feedback delay parameter Dt. For the purpose of determining
thefeedback parameters, the common feedback delay can be set to
zero. Second-order
feedback is used in order to produce the required first and
second harmonics in thetarget interaction function. The constant
term in equation (2.3) is arbitrary andcan be safely neglected (k0
= 0). Although both the linear and quadratic termsof the feedback
function contain weak third (and higher) order harmonics,
theireffect on the interaction function is negligible since the
third (and higher) orderharmonics of the response function are
small. The feedback parameters are foundby numerically solving for
h(x) (Kori et al. 2008), with one solution being
(k1, k2, t1, t2) (2.56, 4.68, 5.34, 1.98). (3.12)
As expected, the magnitudes of the higher harmonics are very
small,
|h3Z3| 0.01 and |h4Z4| 0.004, (3.13)
for the parameter set (equation 3.12).
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
7/16
Synchronization engineering 2195
Df*
0
p/2
p
0.8 1.2 1.6 2.0
a(rad)2.4
Figure 3. Numerical simulation using a system of two Brusselator
oscillators. Stationary phasedifference Df as a function ofa, where
auDt. The lines show the theoretical prediction (stable,solid;
unstable, dotted) from the phase model. Data points are numerically
obtained, where Df
for p
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
8/16
2196 C. G. Rusin et al.
counter electrode
reference
potentiostat
ZRA
computerfeedback (dV)I(t)
V(t) =V0 + dV
Rp
working electrode
3M H2SO4
Figure 4. Schematic diagram of the experimental apparatus. Rp
represents a set of resistors, onefor each element in the
population. The computer is a real-time data acquisition computer,
whichcalculates the feedback signal, dV.
to the mean amplitude of the population (Amean):
Im(t)=Amean
Am(Im(t) IOffsetm ). (4.1)
The host machine was used to continuously determine the offset
and amplitudeof each rhythmic element in the population over time.
The feedback signal, dV,fed back to the potentiostat was calculated
using the equation
dV=K
N
Nm=1
h(xm(t)), (4.2)
where K is the overall feedback gain (i.e. interaction
strength), h(x) is equation(2.3) and xm(t) is the potential drop
across the double layer for the mth electrode,calculated as
xm(t)= V(t) Im(t)Rp, (4.3)
where V(t) is the applied voltage and Rp is the channel
resistance.Before the nickel electrode array was placed into the
system, it was polished
with a wet rotary polisher to remove any initial oxide layer
that may have beenpresent. Six polishing discs were used,
decreasing in roughness from 180 to 4000grit. This ensured that the
electrodes started from roughly identical conditionsand that these
initial conditions were approximately identical for each
experiment.After polishing, the electrodes were placed in the acid
solution and the potentialwas ramped from 0.68 to 1.25 V and back
to 0 V without any resistors present.
This caused a thin passive oxide layer to form on each
electrode. After this cyclewas complete, the resistors were
reconnected and the system was brought up tothe desired operating
voltage. The system was allowed to line out at this voltage
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
9/16
Synchronization engineering 2197
1.15(a) (b)
1.10
1.05
1.00
0.95
0.900 2 4 6
time (s)
E
(V)
8 10
1.4
1.2
0.8
1.0
0.60 126 18 24
time (s)
Df
(rad/2p)
30 36
Figure 5. (a) Time series of electrode potential, E, during
electrochemical dissolution of twonickel wires in 3M sulphuric acid
without feedback (V= 1.165V, Rp = 650U, u1 = 0.4796Hz,u2 = 0.5105
Hz). (b) Unbounded phase difference between the two waveforms seen
in ( a).
for approximately 1.52.0 h, as this was found to reduce the
amount of drift in theinherent frequency of the oscillators. The
electrode potential waveform of bothelements can be seen in figure
5a. In the absence of feedback, the phase differencebetween the two
elements increases over time (figure 5b).
(b) Determining the response function
The response function can be determined from equation (2.2),
providedthat the interaction function and feedback function are
both known. Work byMiyazaki & Kinoshita (2006) was extended to
provide a method for measuringthe interaction function of a
rhythmic system composed of two non-identicaloscillators under weak
global feedback. Physically, the interaction functionrepresents the
change in the frequency of a rhythmic element as a function ofits
phase relative to all other interacting elements in the system.
Therefore,the interaction function can be determined by recording
the frequency (orperiod) of two interacting oscillators as a
function of their phase difference.Two electrochemical oscillators
were created, with different inherent frequencies,and a weak
feedback signal was applied to the system. The magnitude ofthe
feedback was selected such that the system was unable to
synchronize,allowing the phase difference between the elements to
grow over time (figure 6a).
The weak interaction caused the period of the two oscillators to
fluctuate asthe phase difference between the elements changed
(figure 6b). By integratingthe instantaneous frequency of one of
the oscillators over the observed periodof a single cycle and
equating this to 2p rad (Miyazaki & Kinoshita 2006),
theinteraction function can be determined using the equation
H(Df)=2p
KP2base[P(Df) Pbase], (4.4)
where Pbase is the intrinsic period of the oscillator and K is
the overallfeedback gain.
Measuring interaction functions under different feedback
conditions allowedthe response function (figure 6d) to be
calculated from equation (2.2). Thesesets of data were used in a
multi-objective optimization to find the single best
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
10/16
2198 C. G. Rusin et al.
2.10
2.05
pe
riod(s)
2.00
1.950 50 100 150
time (s)
E(V)
200
(a) (b)
(c) (d)
4
3
Df
(rad/2p)
1
2
0 50 100 150
time (s)
200
1.0
0.5
H(Df)
(rads
1)
0.5
0
1.00 0.25 0.50 0.75
Df(rad/2p)
1.00
401.15
0.850 2p
f
20
Z(rad/2p)
0
20
400 0.25 0.50 0.75
f(rad/2p)
1.00
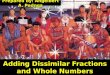
Figure 6. Measuring a response function. (a) Unbounded phase
difference of the heterogeneoussmooth oscillator seen for the
experimental system under first-order feedback. K= 0.07, k0 = 0
V,k1 = 1, t1 = 0.012 rad/2p. (b) Fluctuations in the period of a
single oscillator owing to feedback.(c) Measured interaction
function obtained using equation (4.4). (d) Optimized response
function
Z(f) and waveform (inset) of a single oscillator.
response function that could reproduce all the measured
interaction functionssimultaneously. This fitting was necessary to
reduce the effects of experimentalnoise in the interaction function
measurements. The Fourier coefficients of theresponse function were
used as the optimization parameters. The number ofFourier terms to
be optimized was determined by the number of higher
harmonicspresent in the waveform and the measured interaction
functions. Close to the Hopfbifurcation point (approx. 1.105 V),
only one to two terms were necessary sincethe system was largely
sinusoidal. At higher circuit potentials (approx. 1.20 V),the
system became relaxational and the response function required
approximatelyseven terms. At the experimental circuit potential of
1.165 V, four Fourier termswere used since the system was at a
slightly higher voltage than the Hopfbifurcation point, but still
exhibited relatively smooth oscillations. Additionally,it was found
that increasing the number of coefficients did not significantly
alterthe shape of the response function. A simplex optimization
algorithm was usedto determine the value of the Fourier
coefficients by minimizing an objectivefunction of the form
error=
Nn=1
Ptsi=1
(|Tni Dni | )
21/2
, (4.5)
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
11/16
Synchronization engineering 2199
(b) 1.5
1.0
0.5
0
0.5
1.0
1.50 0.25 0.50 0.75
Df(rad/2p)
1.00
(a) 2
1
0
H
(rads
1)
1
20 0.25 0.50 0.75
Df(rad/2p)
1.00
Figure 7. (a) The target interaction function (dotted line) and
the optimized interaction function(solid line) determined by
feedback parameter optimization. (b) Interaction function
measuredusing the experimental system (dots) and phase model
prediction (line) using the responsefunction in figure 6 and
feedback parameters (K= 0.03, k0 = 0.03V, k1 = 1.72, k2
=4.6816V1,t1 = 0.012rad/2p, t2 = 0.143rad/2p).
where Tni is the ith data point of the nth measured interaction
function, D isthe interaction function calculated using the
optimized response function, N isthe number of measured interaction
function datasets and Pts is the number ofmeasured points in the
function. The initial conditions were taken to be theFourier
coefficients of a sine wave, since the response function approaches
asine wave as the system approaches the Hopf bifurcation point. On
average, theoptimization required approximately 1200 iterations to
converge, correspondingto approximately 20 min.
(c) Calculating the feedback signal
The target interaction function (figure 7a) was engineered into
theexperimental system using the nonlinear time-delayed feedback
defined inequation (2.3). The feedback parameters kn and tn can be
calculated usingequation (2.2), provided that the response function
of the system and the targetinteraction function are known. The
common feedback delay, Dt, was set to zerofor this calculation. A
simplex optimization algorithm was used to minimize theerror
between the calculated and target interaction functions by
manipulatingthe feedback parameters. The objective function for
this optimization was
error=
Ptsi=1
(|Ti Hi|)21/2
, (4.6)
where Ti is the ith data point of the target interaction
function, H is theoptimized interaction function and Pts is the
number of data points in thefunctions T and H. Second-order
feedback was used, since this is the highestorder harmonic present
in the target interaction function. The initial conditions
for the optimization were taken to be kn= 10n
1 and tn= 0.01rad/2p. This allowseach polynomial feedback term
to be of the same order of magnitude, since |x|< 1.The
optimization successfully found a feedback parameter set that
produced the
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
12/16
2200 C. G. Rusin et al.
target interaction function with sufficient accuracy:
(K, k0, k1, k2, t1, t2)=
(0.03,0.03V,1.72,4.6816V1,0.012rad/2p,0.143rad/2p).
(4.7)
Figure 7a shows the optimized interaction function (solid line)
compared withthe target interaction function (dashed line). There
is good agreement betweenthe target interaction function and the
optimized interaction function. Since theoptimized function has a
large domain of negative slope, it will produce a largenon-trivial
synchronization region.
The feedback parameters were experimentally validated by
measuring theinteraction function produced by the optimized
feedback conditions. Figure 7billustrates the agreement between the
predicted interaction function and themeasured interaction
function, indicating that the optimized parameters weresuccessful
in producing the desired interaction function.
(d) Experimental results
The feedback parameters (equation (4.7)) were applied to the
experimentalsystem and the common feedback delay, Dt, was adjusted
to achieve the desiredphase difference between the two rhythmic
elements. The phase of an elementwas linearly interpolated between
adjacent peaks in the observed waveform;the phases of the peaks
were defined as 0 and 2p rad, respectively. WhenDt= 0rad/2p, the
elements phase-synchronized with Df= 0rad/2p (figure8a,d). Under
these conditions, the system exhibited only one stable
stationary
state, corresponding to the root ofH
(Df
) located atDf=
0 (figure 8g
).Increasing Dt to 0.23rad/2p caused the interaction function to
shift, changingthe synchronized phase difference to Df= 0.73 rad/2p
(figure 8b,e). In thiscase, the system exhibited bi-stability, in
which two stable stationary states(Df= 0.73 and Df= 0.28rad/2p)
coexist simultaneously (figure 8h). Furtherincreasing Dt to
0.5rad/2p caused the elements to synchronize in an
anti-phaseconfiguration, where Df= 0.5 rad/2p (figure 8c,f). This
anti-phase configurationcorresponded to the root ofH(Df) located at
Df= 0.5rad/2p (figure 8i), whichwas previously unstable.
A more quantitative comparison between the phase model
predictions andexperimental results can be seen in figure 9. The
bifurcation diagram in figure 9a
was generated by tracking the roots ofH(Df) (and their
associated derivatives)as a function ofDt. Therefore, the diagram
represents all the possible stationarystates (both stable and
unstable) for the experimental system at different valuesof Dt. To
determine the accuracy of these predictions, the stationary
phasedifference between two electrochemical elements was
experimentally measuredwith different values ofDt. These
measurements were made by first synchronizingthe system on the
upper non-trivial branch of the bifurcation diagram usingthe
appropriate delay and initial conditions. When the initial phase
differencebetween the elements was 0.5
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
13/16
Synchronization engineering 2201
1.15(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
1.10
1.05
E(V)
1.00
0.95
0.90
1.00
0.75
0.50
Df(rad/2p)
0.25
0 2 4time (s)
6
1.5
1.00.5
0
H(rads
1)
0.5
1.0
1.50 0.25 0.50 0.75
Df(rad/2p)
1.00
0 2 4time (s)
6 0 2 4time (s)
6
0.6
0.40.2
0
0.2
0.4
0 0.25 0.50 0.75
Df(rad/2p)
1.00
1.5
1.00.5
0
0.5
1.0
1.50 0.25 0.50 0.75
Df(rad/2p)
1.00
Figure 8. (ac) Time series of the electrode potential, (df)
phase difference and (gi) H(Df)of a system of two elements with
second-order global feedback (K= 0.03, k0 = 0.03V, k1 = 1.72,k2
=4.6816V1, t1 = 0.012 rad/2p, t2 = 0.143rad/2p). (a,d,g) In-phase
synchronization (Dt=
0rad/2p). (b,e,h) Representative out-of-phase synchronization
(Dt= 0.23rad/2p). (c,f,i) Anti-phase synchronization (Dt=
0.5rad/2p). The phase loop diagrams indicate the relative position
of
the elements in the system and the direction of rotation. The
roots of H(Df) are indicated withthe associated stationary state
stability (black circles denote stable states, grey squares
denoteunstable states).
(a)
0.1 0.2 0.3 0.4 0.5 1.000.750.50
experimental data (rad/2p)
0.25
1.00
0.75
0.50
0.25Df*(rad
/2p)
Dt(rad/2p)
0
(b) 1.00
0.75
0.50
0.25
phasemode
l(rad/2p)
0
Figure 9. (a) Stationary phase difference values of a system of
two rhythmic elements undersecond-order feedback (K= 0.03, k0 =
0.03V, k1 = 1.72, k2 =4.6816V1, t1 = 0.012 rad/2p, t2
=0.143rad/2p). Lines represent phase model predictions of the
stable stationary states (solid) and
unstable stationary states (dotted). Circles represent
experimental measurements with positivefeedback, and triangles
represent measurements with negative feedback. (b) Parity plot
ofexperimental measurements versus phase model predictions.
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
14/16
2202 C. G. Rusin et al.
the feedback was removed and the system was allowed to drift
into the range ofinitial conditions required to reach the lower
branch (0
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
15/16
Synchronization engineering 2203
systems are considered; it is usually a formidable task to
construct an appropriatedetailed mathematical model of a biological
system; however, the investigation ofthe phase response function is
often possible.
This work was supported in part by the National Science
Foundation through grant CBET-0730597.I.Z.K. thanks the organizers
for financial aid to attend ECC10. H.K. acknowledges
financialsupport from the Grants-in-Aid for Young Scientists (no.
19800001) and the Sumitomo Foundation(no. 071019).
References
Battogtokh, D. & Mikhailov, A. 1996 Controlling turbulence
in the complex GinzburgLandauequation. Physica D 90, 8495.
(doi:10.1016/0167-2789(95)00232-4)
Belykh, V. N., Osipov, G. V., Kucklander, N., Blasius, B. &
Kurts, J. 2005 Automatic controlof phase synchronization in coupled
complex oscillators. Physica D 200, 81104.
(doi:10.1016/j.physd.2004.10.008)
Di Donato, P. F. A., Macau, E. E. N. & Grebogi, C. 2007
Phase locking control in the circle map.Nonlinear Dyn. 47, 7582.
(doi:10.1007/s11071-006-9055-7)
Epstein, I. R. & Pojman, J. A. 1998 Chemical dynamics:
oscillations, waves, patterns, and chaos.Oxford, UK: Oxford
University Press.
Ermentrout, G. B. 2002 Simulating, analyzing, and animating
dynamical systems: a guide toXPPAUT for researchers and students.
Philadelphia, PA: SIAM.
Galan, R. F., Ermentrout, G. B. & Urban, N. N. 2005
Efficient estimation of phase-resettingcurves in real neurons and
its significance for neural-network modeling. Phys. Rev. Lett.
94,158101. (doi:10.1103/PhysRevLett.94.158101)
Glansdorff, P. & Prigogine, I. 1971 Thermodynamic theory of
structure, stability, and fluctuations.London, UK: Wiley.
Iglesia, H. O., Meyer, J., Carpino, A. & Schwartz, W. J.
2000 Antiphase oscillation of the left and
right suprachiasmatic nuclei. Science 290, 799801.
(doi:10.1126/science.290.5492.799)Kiss, I. Z., Zhai, Y. M. &
Hudson, J. L. 2005 Predicting mutual entrainment of oscillatorswith
experiment-based phase models. Phys. Rev. Lett. 94, 248301.
(doi:10.1103/PhysRevLett.94.248301)
Kiss, I. Z., Rusin, C. G., Kori, H. & Hudson, J. L. 2007
Engineering complex dynamicalstructures: sequential patterns and
desynchronization. Science 316, 18861889.
(doi:10.1126/science.1140858)
Kori, H., Rusin, C. G., Kiss, I. Z. & Hudson, J. L. 2008
Synchronization engineering: theoreticalframework and application
to dynamical clustering. Chaos 18, 026111.
(doi:10.1063/1.2927531)
Kuramoto, Y. 1984 Chemical oscillations, waves and turbulence.
New York, NY: Springer.Mikhailov, A. S. & Showalter, K. 2006
Control of waves, patterns and turbulence in chemical
systems.Phys. Rep. 425
, 79194. (doi:10.1016/j.physrep.2005.11.003)Miyazaki, J. &
Kinoshita, S. 2006 Method for determining a coupling function in
coupledoscillators with application to BelousovZhabotinsky
oscillators. Phys. Rev. E 74,
056209.(doi:10.1103/PhysRevE.74.056209)
Oliva, R. A. & Strogatz, S. H. 2001 Dynamics of a large
array of globally coupledlasers with distributed frequencies. Int.
J. Bifurcation Chaos 11, 23592374.
(doi:10.1142/S0218127401003450)
Petrov, V., Ouyang, Q. & Swinney, H. L. 1997 Resonant
pattern formation in a chemical system.Nature 388, 655657.
(doi:10.1038/41732)
Popovych, O. V., Hauptmann, C. & Tass, P. A. 2006 Control of
neuronal synchrony by nonlineardelayed feedback. Biol. Cybern. 95,
6985. (doi:10.1007/s00422-006-0066-8)
Tass, P. A. 1999 Phase resetting in medicine and biology.
Stochastic modeling and data analysis.
Berlin, Germany: Springer.Traub, R. D. & Wong, R. K. S. 1982
Cellular mechanism of neuronal synchronization in epilepsy.
Science 216, 745747. (doi:10.1126/science.7079735)
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://dx.doi.org/doi:10.1016/0167-2789(95)00232-4http://dx.doi.org/doi:10.1016/j.physd.2004.10.008http://dx.doi.org/doi:10.1016/j.physd.2004.10.008http://dx.doi.org/doi:10.1016/j.physd.2004.10.008http://dx.doi.org/doi:10.1007/s11071-006-9055-7http://dx.doi.org/doi:10.1103/PhysRevLett.94.158101http://dx.doi.org/doi:10.1103/PhysRevLett.94.158101http://dx.doi.org/doi:10.1103/PhysRevLett.94.158101http://dx.doi.org/doi:10.1126/science.290.5492.799http://dx.doi.org/doi:10.1126/science.290.5492.799http://dx.doi.org/doi:10.1103/PhysRevLett.94.248301http://dx.doi.org/doi:10.1103/PhysRevLett.94.248301http://dx.doi.org/doi:10.1126/science.1140858http://dx.doi.org/doi:10.1126/science.1140858http://dx.doi.org/doi:10.1126/science.1140858http://dx.doi.org/doi:10.1063/1.2927531http://dx.doi.org/doi:10.1016/j.physrep.2005.11.003http://dx.doi.org/doi:10.1103/PhysRevE.74.056209http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1038/41732http://dx.doi.org/doi:10.1007/s00422-006-0066-8http://dx.doi.org/doi:10.1126/science.7079735http://dx.doi.org/doi:10.1126/science.7079735http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://dx.doi.org/doi:10.1126/science.7079735http://dx.doi.org/doi:10.1007/s00422-006-0066-8http://dx.doi.org/doi:10.1038/41732http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1142/S0218127401003450http://dx.doi.org/doi:10.1103/PhysRevE.74.056209http://dx.doi.org/doi:10.1016/j.physrep.2005.11.003http://dx.doi.org/doi:10.1063/1.2927531http://dx.doi.org/doi:10.1126/science.1140858http://dx.doi.org/doi:10.1126/science.1140858http://dx.doi.org/doi:10.1103/PhysRevLett.94.248301http://dx.doi.org/doi:10.1103/PhysRevLett.94.248301http://dx.doi.org/doi:10.1126/science.290.5492.799http://dx.doi.org/doi:10.1103/PhysRevLett.94.158101http://dx.doi.org/doi:10.1007/s11071-006-9055-7http://dx.doi.org/doi:10.1016/j.physd.2004.10.008http://dx.doi.org/doi:10.1016/j.physd.2004.10.008http://dx.doi.org/doi:10.1016/0167-2789(95)00232-4
-
8/3/2019 Craig G. Rusin et al- Synchronization engineering:
tuning the phase relationship between dissimilar oscillators
using
16/16
2204 C. G. Rusin et al.
Tsubo, Y., Takada, M., Reyes, A. & Fukai, T. 2007 Layer and
frequency dependencies of phaseresponse properties of pyramidal
neurons in rat motor cortex. Eur. J. Neurosci. 25,
34293441.(doi:10.1111/j.1460-9568.2007.05579.x)
Winfree, A. T. 1980 The geometry of biological time. New York,
NY: Springer.Yamaguchi, S., Isejima, H., Matsuo, T., Okura, R.,
Yagita, K., Kobayashi, M. & Okamura, H.
2003 Synchronization of cellular clocks in the suprachiasmatic
nucleus. Science 302, 14081412.(doi:10.1126/science.1089287)Zhai,
Y., Kiss, I. Z. & Hudson, J. L. 2004 Emerging coherence of
oscillating chemical reactions
on arrays: experiments and simulations. Ind. Eng. Chem. Res. 43,
315326. (doi:10.1021/ie030164z)
Phil. Trans. R. Soc. A (2010)
on April 19, 2010rsta.royalsocietypublishing.orgDownloaded
from
http://dx.doi.org/doi:10.1111/j.1460-9568.2007.05579.xhttp://dx.doi.org/doi:10.1126/science.1089287http://dx.doi.org/doi:10.1021/ie030164zhttp://dx.doi.org/doi:10.1021/ie030164zhttp://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://rsta.royalsocietypublishing.org/http://dx.doi.org/doi:10.1021/ie030164zhttp://dx.doi.org/doi:10.1021/ie030164zhttp://dx.doi.org/doi:10.1126/science.1089287http://dx.doi.org/doi:10.1111/j.1460-9568.2007.05579.x