Embed Size (px)
Citation preview

Covariance Intersection Fusion Wiener Signal Estimators based on Embedded-Time-delay ARMA
Model
Yuan Gao Department of Automation
Heilongjiang University Harbin, China
Zili Deng Department of Automation
Heilongjiang University Harbin, China
Abstract—Different from those previous methods for solving the problems of time-delay systems, the time delays are embedded into the ARMA innovation models by modern time series analysis method. Using the measurement predictors and the white noise estimators, the local and the optimal information fusion Wiener signal estimators are presented for the two-sensor multichannel signal systems. Applying the CI (Covariance Intersection) method, the CI fused Wiener signal estimators are derived, which avoid the computation of the cross-covariance, therefore they can significantly reduce the computation burden. It is rigorously proved that their estimation accuracies are higher than those of the local Wiener estimators, and are lower than that of the optimal fusion Wiener signal estimators. The Monte-Carlo simulation results show that the actual accuracies of the presented CI fusion Wiener estimators approximate to those of the corresponding optimal information fusion Wiener estimators, and based on the covariance ellipse, the geometric interpretation of the accuracy relation is shown.
Keywords- time delay; Covariance Intersection fusion; modern time series analysis method; embedded-time-delay ARMA model
I. INTRODUCTION It is known that the standard Kalman filtering assumes that
the system model and the statistics of the noises are known exactly [1]. However, this assumption does not always hold. For a large class of practical applications, the situation is more complicated, where the measurement data is not observed directly, but obtained with known or random time delays.
One of the typical methods to handle those problems with known delays is the system augmentation method in conjunction with standard Kalman filtering [2, 3]. However, the augmentation method generally leads to a much expensive computational cost, especially when the delays are large. Another method is called re-organized innovation approach [1]. Although it reduces the computational cost largely, it also needs big memory space. By modern time series analysis method, the most ordinary method is to transform the time-delay system into a system without time delays by introducing a new measurement information, but it also needs big memory space to store the old and the new measurements.
In this paper, in order to overcome those disadvantages, applying modern time series analysis method [4], the time delays will be embedded into the ARMA innovation model. By the steady-state optimal measurement predictors and the white noise estimators, the local and the information fusion steady-state optimal signal Wiener estimators are presented. But this method requires computing the cross-covariance between two local estimation errors, and in practice application, it is often difficult to calculate, which yields a large computational burden and computational complexity.
Therefore, using the covariance intersection (CI) fusion method [5, 6], the CI fusion Wiener signal estimators are presented, where the cross-covariance among the local sensors are avoided. Compared with the information fusion and the measurement fusion methods [7, 8], the CI fusion method can obviously reduce computational burden. Monte Carlo simulation results show that, compared with the proposed optimal fusion Wiener estimator, its accuracy is close to that of the optimal fusion Wiener estimator. The accuracy relations among the local, the optimal information fusion and the CI fusion Wiener signal estimators are rigorously proved.
II. PROBLEM FORMULATIN Consider a multichannel two-sensor ARMA signal system
1 1( ) ( ) ( ) ( )A q s t C q w t− −= (1) ( ) ( ) ( )i i iy t s t v tτ= − + , 1, 2i = (2) where t is the discrete time, ( ) m
iy t R∈ is the measurement of the ith sensor, ( ) ms t R∈ is the signal, ( ) m
iv t R∈ is the measurement noise, ( ) rw t R∈ is the input noise, and 0iτ > is the time delay. 1( )A q − and 1( )C q− are the polynomial matrices of the backward shift operator 1q − , with the form as
1 10 1( ) x
x
nnX q X X q X q −− −= + + + , 0 mA I= , 0 0C = and
a cn n≥ .
Assumption 1. ( )w t and ( )iv t are the uncorrelated white noises with zero means and variances wQ , viQ , respectively, i.e.
This work is supported by National Natural Science Foundation of Chinaunder Grant NSFC-60874063, Science Foundation of Distinguished YoungScholars of Heilongjiang University, Open Fund of Key Laboratory ofElectronics Engineering, College of Heilongjiang Province (HeilongjiangUniversity, DZZD20100004), Key Laboratory of Automation of HeilongjiangUniversity. 1447

T T 0( )E ( ) ( )
0( ) jw
tkvi iji
Qw tw k v k
Qv tδ
δ⎧ ⎫ ⎡ ⎤⎡ ⎤⎪ ⎪⎡ ⎤ =⎨ ⎬ ⎢ ⎥⎢ ⎥ ⎣ ⎦⎪ ⎪⎣ ⎦ ⎣ ⎦⎩ ⎭
(3)
where E denotes the mathematical expectation, T denotes the transpose, and tkδ is the Kronecker delta function, i.e. 1ttδ = ,
0( )tk t kδ = ≠ . Assumption 2. 1 1( ( ), ( ))A q C q− − is left-coprime.
The problem is to find the optimal fusion Wiener estimators 0ˆ ( | )s t t N+ when the cross covariance is used, and to find the
CI fusion Wiener signal estimators ˆ ( | )CIs t t N+ of the signal ( )s t when the cross covariance is avoided.
III. OPTIMAL INFORMATION FUSION WIENER SIGNAL ESTIMATORS
A. Embedded-Time-Delay ARMA Innovation Model From (1) and (2), it yields
1 1 1( ) ( ) ( ) ( ) ( ) ( )i i iA q y t C q w t A q v tτ− − −= − + (4)
By Gevers-Wouters algorithm [9], the local embedded-time-delay ARMA innovation model can be obtained 1 1( ) ( ) ( ) ( )i i iA q y t D q tε− −= (5) where 1( )iD q− is stable, 1 1
0 1( )i i iD q D D q− −= + + di
di
ninD q−+ , 0i mD I= , max( , )di a c in n n τ= + , the innovation
( ) mi t Rε ∈ is the white noise with zero mean and variance iQε ,
and 1 1 1( ) ( ) ( ) ( ) ( ) ( )i i i iD q t C q w t A q v tε τ− − −= − + (6)
It is clear that the time delays are embedded into the innovation model. In fact, from (6), it can be seen that since
( )iw t τ− can be replaced by a new noise, the real order of 1( )iD q− is di an n= .
The expanding form of (6) is [9]
1 1 1 1 1 1( ) ( ) ( ) ( ) ( ) ( ) ( )i i i i it D q C q w t D q A q v tε τ− − − − − −= − +
( ) ( )
0 0( ) ( )i i
k i k ik k
F w t k G v t kτ∞ ∞
= =
= − − + −∑ ∑ (7)
where the coefficient matrices can be recursively calculated by ( ) ( ) ( )
1 1 di di
i i ik i k in k n kF D F D F C− −= − − − + ,
( ) ( ) ( )1 1 di di
i i ik i k in k n kG D G D G A− −= − − − + (8)
B. Local Wiener Signal Estimator Lemma 1 [9]. The local steady-state optimal measurement
predictor of the ith sensor is
( ) 1 1 1ˆ ( | ) ( ) ( ) ( )ii N i iy t t N J q D q y t N− − −
−+ = + , 1, 2i = (9) where 1 ( ) 1 1 ( ) 1( ) ( ) ( ) ( )i N i
i N i ND q E q A q q J q− − − −− −= + , 0N < ,
( ) 1 1( ) ( )i NN iJ q D q q− − −
− = , 0N ≥ , ( ) 1 ( ) 1 ( ) 1
1 , 1( )i i i NN m N N NE q I E q E q− − +
− − − − −= + + + , 0N < ,
( ) 1 ( ) ( ) 1 ( )0 1( ) j
j
ni i i iN N N NnJ q J J q J q−− −
− − − −= + + + , 0N < (10) max( 1, )j a din n n N= − + , and
1 1 1 1 1 1( ) ( ) ( ) ( )i i iD q A q A q D q− − − − − −= (11) with 0i mA I= , 0i mD I= , and 1 1det ( ) det ( )i iD q D q− −= (12) The prediction error matrix is
( ) 1ˆ( | ) ( ) ( | ) ( ) ( ), 0ii i i N iy t t N y t y t t N E q t Nε−
−+ = − + = < (13) ( | ) 0, 0iy t t N N+ = ≥ (14)
and the prediction error variance matrix is
1
( ) ( )T
0
( ) , 0N
y i ii Nk i Nk
kP N E Q E Nε
− −
− −=
= <∑ (15)
( ) 0, 0yiP N N= ≥ (16)
Lemma 2 [9]. The local steady-state optimal measurement white noise estimator of the ith sensor is
0
ˆ ( | ) ( )N
ivi k i
kv t t N M t kε
=
+ = +∑ , 0N ≥ , 1, 2i = ,
ˆ ( | ) 0iv t t N+ = , 0N < (17) with the coefficient matrices as ( )T 1iv i
k vi k iM Q G Qε−= (18)
where the coefficients ( )ikG can be calculated recursively
( ) ( ) ( )1 1 di di
i i ik i k in k n kG D G D G A− −= − − − + (19)
with the definition ( ) 0( 0)ikG k= < , 0( )k aA k n= > . It can be
expressed as the innovation form or Wiener filter form 1ˆ ( | ) ( ) ( )iv
i N iv t t N L q t Nε−+ = + 1 1 1 1( ) ( ) ( ) ( )iv
N i i iL q A q D q y t N− − − −= + (20) with the definition
1
0
( )N
iv iv k NN k
kL q M q− −
=
=∑ , 0N ≥ , 1, 2i = ,
1( ) 0ivNL q− = , 0N < (21)
and the corresponding steady-state local estimation variance matrix is
T
0
( ) , 0N
v iv ivi vi k i k
kP N Q M Q M Nε
=
= − ≥∑ ,
( ) , 0vi viP N Q N= < (22)
Theorem 1. The local Wiener signal estimator of the ith sensor is
( ) 1 1 1ˆ ( | ) ( ) ( ) ( )i
ii N i is t t N K q D q y t Nτ
− − −−+ = + (23)
( ) 1 ( ) 1 1 1( )( ) ( ) ( ) ( )
i i i
i i ivN N N iK q J q L q A qτ τ τ
− − − −− − − −= − (24)
whose ARMA recursive form is 1 ( ) 1 1ˆdet ( ) ( | ) ( )adj ( ) ( )
i
ii i N i iD q s t t N K q D q y t Nτ
− − −−+ = + (25)
with the error matrix
T
0
( )iN
iv ivii vi k i k
kP N Q M Q M
τ
ε
−
=
= − ∑ , iN τ≥ (26)
1
( ) ( )T( ), ( ),
0
( )i
i i
Ni i
ii N k i N k vik
P N E Q E Qτ
τ ε τ
− + −
− − − −=
= −∑ , iN τ< (27)
Proof. From (2), it yields that
1448

( ) ( ) ( )i i i iy t s t v tτ τ+ = + + (28)
From the property of projective theorem, the local estimation can be
ˆ ˆ ˆ( | ) ( | ) ( | )i i i i is t t N y t t N v t t Nτ τ+ = + + − + + (29)
Notice that
ˆ ˆ( | ) ( | ( ))i i i i i iy t t N y t t Nτ τ τ τ+ + = + + + − (30)
ˆ ˆ( | ) ( | ( ))i i i i i iv t t N v t t Nτ τ τ τ+ + = + + + − (31)
From (9) and (20), it yields
( ) 1 1 1( )ˆ ( | ) ( ) ( ) ( )
i
ii i N i iy t t N J q D q y t Nττ − − −
− −+ + = + ,
1 1 1 1ˆ ( | ) ( ) ( ) ( ) ( )i
ivi i N i i iv t t N L q A q D q y t Nττ − − − −
−+ + == + (32)
Substituting (32) into (29) yields (23) and (24). Subtracting (29) from (28) yields
( | ) ( | ) ( | )i i i i is t t N y t t N v t t Nτ τ+ = + + − + + (33)
When iN τ≥ , from (14) and (30), it is obtained
( | ) 0i iy t t Nτ+ + = (34)
So (33) becomes
( | ) ( | )i i is t t N v t t Nτ+ = − + + (35)
From (22) and (35), it yields (26).
When iN τ< , applying (17) yields
( | ) ( )i i iv t t N v tτ τ+ + = + (36)
So (33) can be rewritten as
( | ) ( | ) ( )i i i i is t t N y t t N v tτ τ+ = + + − + (37)
that is,
( | ) ( ) ( | )i i i i is t t N v t y t t Nτ τ+ + + = + + (38)
Notice that, when iN τ< , from (1) and (2), we know that ( | )is t t N+ and ( )i iv t τ+ are uncorrelated and
( | ) ( | ( ))i i i i i iy t t N y t t Nτ τ τ τ+ + = + + + − (39)
Then using (9) and (15), setting it t τ= + , iN N τ= − , and taking variance calculation to (38), (27) is obtained. The proof is completed.
C. Computation of the Cross-covariance Theorem 2. If max( ), 1,2iN iτ≥ = , for the multichannel
ARMA signal system (1) and (2), under Assumption 1-3, the cross-covariance matrix 12 ( )P N of the local steady-state estimation errors is
1 21 2 T
12 120 0
( ) ( , )N N
v vr s
r sP N M E r s M
τ τ− −
= =
= ∑ ∑ , max( ), 1,2iN iτ≥ = (40)
with the definition T12 1 1 2 2( , ) E[ ( ) ( )]E r s t r t sε τ ε τ= + + + + as
(1) (2)T12
0
( , ) k w k s rk
E r s F Q F∞
+ −=
=∑ (41)
Proof. When max( ), 1,2iN iτ≥ = , from (35), we have
12 1 1 1 1ˆ( ) E[( ( ) ( | ))P N v t v t t Nτ τ= + − + + × T
2 2 2 2ˆ( ( ) ( | )) ]v t v t t Nτ τ+ − + + (42) From (7), (17) and Assumption 1, (42) can be simplified as T
12 1 1 2 2ˆ ˆ( ) E[ ( | ) ( | )]P N v t t N v t t Nτ τ= + + + + (43) From (17) and (31), it yields
1 21 2 T
12 1 1 2 20 0
( ) E{[ ( )][ ( )] }N N
v vr r
r sP N M t r M t r
τ τ
ε τ ε τ− −
= =
= + + + +∑ ∑ (44)
which yields (40). Set 1t t rτ= + + and 2t t sτ= + + in (7) respectively, and we have
(1) T (2)T12
0 0
( , ) E[ ( ) ( )]k uk u
E r s F w t r k w t s u F∞ ∞
= =
= + − + −∑∑
(1) (2)T
0k w k s r
kF Q F
∞
+ −=
=∑ (45)
The proof is completed. Theorem 3. If min( ), 1, 2iN iτ< = , for the multichannel
ARMA signal system (1) and (2), the cross-covariance matrix 12 ( )P N of the local steady-state estimation errors is
1 2
1 2
1 1(1) (2)T
12 , 12 ,0 0
( ) ( , )N N
N r N sr s
P N E r s Eτ τ
τ τΣ− − − −
− + − += =
= ∑ ∑ (46)
with the definition T12 1 1 2 2( , ) E[ ( ) ( )]r s t r t sΣ ε τ ε τ= + − + − as
(1) (2)T12
0
( , ) k w k r sk
r s F Q FΣ∞
+ −=
=∑ (47)
Proof. When min( ), 1, 2iN iτ< = , by (37), we have
12 1 1 1 1( ) E[( ( | ) ( ))P N y t t N v tτ τ= + + − + × T
2 2 2 2( ( | ) ( )) ]y t t N v tτ τ+ + − + (48) From (7), (13) and Assumption 1, (48) can be simplified as T
12 1 1 2 2( ) E[ ( | ) ( | )]P N y t t N y t t Nτ τ= + + + + (49) From (13) and (39), it yields
1
1
1(1)
12 , 1 10
( ) E{[ ( )]N
N rr
P N E t rτ
τ ε τ− −
− +=
= + − ×∑
2
2
1(2) T
, 2 20
[ ( )] }N
N ss
E t sτ
τ ε τ− −
− +=
+ −∑ (50)
which yields (46). From (7), by setting 1t t rτ= + − and
2t t sτ= + − , (47) can be obtained similar to (45). The proof is completed.
Theorem 4. If 1N τ≥ and 2N τ< , for the multichannel ARMA signal system (1) and (2), the cross-covariance matrix
12 ( )P N of the local steady-state estimation errors is
1 2
2
11 (1) (2)T
12 12 ,0 0
( ) ( , )N N
vr N s
r sP N M r s E
τ τ
τ
− − −
− += =
= Δ∑ ∑ (51)
with the definition (1) T12 1 1 2 2( , ) E[ ( ) ( )]r s t r t sΔ ε τ ε τ= + + + − as
(1) (1) (2)T12
0
( , ) k w k r sk
r s F Q FΔ∞
− −=
=∑ (52)
If 1N τ< and 2N τ≥ , the cross-covariance matrix 12 ( )P N is
1449

1 2
1
1(1) (2) 2 T
12 , 120 0
( ) ( , )N N
vN r s
r sP N E r s M
τ τ
τ
− − −
− += =
= Δ∑ ∑ (53)
with the definition (2) T12 1 1 2 2( , ) E[ ( ) ( )]r s t r t sΔ ε τ ε τ= + − + + as
(2) (1) (2)T12
0
( , ) k w k r sk
r s F Q FΔ∞
+ +=
=∑ (54)
Proof. If 1N τ≥ and 2N τ< , from (35) and (37), we have
12 1 1 1 1ˆ( ) E[( ( | ) ( ))P N v t t N v tτ τ= + + − + × T
2 2 2 2( ( | ) ( )) ]y t t N v tτ τ+ + − + (55) From (13) and (17), it yields
1 2
2
11 (2) T
12 1 1 , 2 20 0
( ) E{[ ( )][ ( )] }}N N
vr N s
r sP N M t r E t s
τ τ
τε τ ε τ− − −
− += =
= + + + −∑ ∑ (56) From (7), (51) and (52) can be derived.
Similarly, if 1N τ< and 2N τ≥ , (53) and (54) can be obtained. The proof is completed.
D. Optimal Information Fusion Wiener Signal Estimator Theorem 5. For the two-sensor multisensor system (1) and
(2), the steady-state optimal weighted fusion Wiener signal estimator is
0 1 1 2 2ˆ ˆ ˆ( | ) ( | ) ( | )s t t N A s t t N A s t t N+ = + + + (57) where
11 22 21 11 22 12 21( ( ) ( ))( ( ) ( ) ( ) ( ))A P N P N P N P N P N P N −= − + − − ,
12 11 12 11 22 12 21( ( ) ( ))( ( ) ( ) ( ) ( ))A P N P N P N P N P N P N −= − + − −
(58) 0 11 11 12( ) ( ( ) ( ))P P N P N P N= − − ×
1 T11 22 12 21 11 12( ( ) ( ) ( ) ( )) ( ( ) ( ))P N P N P N P N P N P N−+ − − −
(59)
IV. COVARIANCE INTERSECTION FUSION WIENER SIGNAL ESTIMATOR
A. CI Fusion Wiener Signal Estimator When 11( )P N and 22 ( )P N are exactly known, in order to
avoid the computation of the cross covariance 12 ( )P N , which often leads to a large calculation burden and computation complexity, using the CI fusion method [3], the CI fusion steady-state Wiener signal estimator is
111 1ˆ ˆ( | ) ( )[ ( ) ( | )CI CIs t t N P N P N s t t Nω −+ = + +
122 2ˆ(1 ) ( ) ( | )]P N s t t Nω −− + (60)
1 1 111 22( ) [ ( ) (1 ) ( )]CIP N P N P Nω ω− − −= + − (61)
where [0,1]ω ∈ , and the minimizing performance index
1 1 111 22[0,1]
min tr ( ) min tr{[ ( ) (1 ) ( )] }CIP N P N P Nω ω
ω ω− − −
∈= + − (62)
where tr denotes the trace of the matrix. For the problem of the nonlinear optimality, the optimal weight coefficients ω can be found out by Golden Section Method or Fibonacci Method [10].
B. Accuracy Analysis Theorem 6. The actual error variance ( )CIP N =
TE[ ( | ) ( | )]CI CIs t t N s t t N+ + of the CI fusion Wiener signal estimator is 2 1 1 1
11 11 12 22( ) ( )[ ( ) (1 ) ( ) ( ) ( )CI CIP N P N P N P N P N P Nω ω ω− − −= + − + 1 1 2 1
22 21 11 22(1 ) ( ) ( ) ( ) (1 ) ( )] ( )CIP N P N P N P N P Nω ω ω− − −− + − (63) where the real estimation error is ( | ) ( )CIs t t N s t+ = − ˆ ( | )CIs t t N+ . The relation between ( )CIP N and ( )CIP N is
( ) ( )CI CIP N P N≤ (64) that is, ( )CIP N is the upper bounder of ( )CIP N .
Proof. From (61), the signal can be rewritten by 1 1
11 22( ) ( )[ ( ) ( ) (1 ) ( ) ( )]CIs t P N P N s t P N s tω ω− −= + − 65) Subtracting (60) from (65), it yields the real estimation error
111 1( | ) ( )[ ( ) ( | )CI CIs t t N P N P N s t t Nω −+ = + +
122 2(1 ) ( ) ( | )]P N s t t Nω −− + (66)
then substituting it into the definition of the real error variance, it directly yields (63). The consistency of CI fuser (64) has been proved in [5]. The proof is completed.
Theorem 7. The accuracy relation between the local and the fused Wiener signal estimators is 0 ( ) ( ) ( )CI CIP N P N P N≤ ≤ (67) 0 ( ) ( ), 1,2iiP N P N i≤ = (68)
Proof. From the unbiasedness of the local estimation ˆ ( | )is t t N+ , i.e. ( | ) 0is t t N+ = , it yields that the fused
estimation 0ˆ ( | )s t t N+ and ˆ ( | )CIs t t N+ are both unbiased. The property of the LUMV (Linear Unbiased Minimum Variance) fusion estimation weighted by matrices is that its error variance matrix is not more than any other error variance matrices of the linear unbiased estimation weighted by matrices. And since the CI fuser (60) belongs to the linear unbiased estimation weighted by matrices, it follows that 0 ( ) ( )CIP N P N≤ (69) From (64) and (69), (67) is also proved.
Let 1 nA I= and 2 0A = in (57), then 0ˆ ( | )s t t N+ can also be viewed as one kind of linear unbiased fusion estimation weighted by matrices. So it yields 0 11( ) ( )P N P N≤ . In a similar way, we have 0 22( ) ( )P N P N≤ . The proof is completed.
Theorem 8. The local and the fused Wiener signal estimators have the following accuracy relations
0tr ( ) tr ( ) tr ( ) tr ( ), 1, 2CI CI iiP N P N P N P N i≤ ≤ ≤ = (70)
Proof. (61) can be viewed as a linear function of ω . Let 0ω = , it yields 22tr ( ) tr ( )CIP N P N= , and let 1ω = , it yields
11tr ( ) tr ( )CIP N P N= . Therefore, when [0,1]ω ∈ , we have tr ( ) tr ( ), 1,2CI iiP N P N i≤ = . From (67), it directly yields
0tr ( ) tr ( ) tr ( )CI CIP N P N P N≤ ≤ . The proof is completed.
V. SIMULATION EXAMPLE Consider a two-sensor multichannel ARMA signal system
with time delays
1450

1 12 1 1( ) ( ) ( )I A q s t c q w t− −− = (71)
( ) ( ) ( )i i iy t s t v tτ= − + , 1, 2i = (72)
where T1 2( ) [ ( ), ( )]s t s t s t= , iτ is the time delays, ( )iy t is the
measurement of the ith sensor, ( )iv t and ( )w t are uncorrelated Gaussian noises with zero mean and variances wQ and viQ , respectively.
Our aim is to find the local signal Wiener signal estimators ˆ ( | ), 1,0,1is t t N N+ = − , the information fused optimal Wiener
signal estimator 0ˆ ( | )s t t N+ , and the CI fused Wiener signal estimator ˆ ( | )CIs t t N+ . Furthermore, the comparisons among those estimators are to be made.
In simulation, we take that
1
1 0.20 0.75
A⎡ ⎤
= ⎢ ⎥⎣ ⎦
, 1
01
c⎡ ⎤
= ⎢ ⎥⎣ ⎦
, 0.2wQ = , 1 1τ = , 2 2τ = ,
1
1 00 0.5vQ⎡ ⎤
= ⎢ ⎥⎣ ⎦
, 2
0.05 00 1vQ
⎡ ⎤= ⎢ ⎥⎣ ⎦
(73)
A. CI Fusion Wiener Signal smoother We obtain
11
0.1161 0.0264(1)
0.0264 0.1892P
⎡ ⎤= ⎢ ⎥⎣ ⎦
, 22
0.0395 0.0512(1)
0.0512 0.3301P
⎡ ⎤= ⎢ ⎥⎣ ⎦
,
12
0.0068 0.0001(1)
0.0129 0.1667P
⎡ ⎤= ⎢ ⎥⎣ ⎦
, 0
0.0284 0.0185(3)
0.0185 0.1862P
⎡ ⎤= ⎢ ⎥⎣ ⎦
,
0.0726 0.0314
(1)0.0314 0.2123CIP⎡ ⎤
= ⎢ ⎥⎣ ⎦
,0.0434 0.0138
(1)0.0213 0.1773CIP⎡ ⎤
= ⎢ ⎥⎣ ⎦
(74)
The traces of the error variance of the local Wiener signal smoothers and the optimal information fusion Wiener signal smoother, and the traces of the theoretical and the real CI fusion variances are compared in Table I.
TABLE I. ACCURACY COMPARISON AMONG THE TRACES OF THE LOCAL AND THE FUSED WIENER SIGNAL SMOOTHERS
11tr (1)P 22tr (1)P 0tr (1)P tr (1)CIP tr (1)CIP
0.3053 0.3695 0.2147 0.2849 0.2208
From Table I, it can be seen that the real accuracy tr (1)CIP of the CI fuser is higher than those of the local smoothers, but less than that of the optimal information fusion smoother. Moreover, (1)CIP is the upper bound of the actual accuracy
(1)CIP of the CI fuser, and is universal to all the CI fusers with known 11 22(1), (1)P P and unknown cross-covariance. This upper bound is unrelated to the unknown cross-covariance, that is, it is insensitive to the unknown cross-covariance. This reflects the robustness of the CI fuser to unknown cross-covariance. And for any cross-covariance, the potential worst
accuracy of the corresponding CI fuser is still higher than those of the local smoothers.
In order to verify the correctness of the presented smoothers and theories, the 100 times Monte-Carlo simulation were run for 1, , 200t = , and the MSE (Mean Square Error) values of the local and the fused Wiener signal smoother at time t are defined as
( ) ( ) T ( ) ( )
1
1 ˆ ˆ( ) ( ( ) ( | 1)) ( ( ) ( | 1))K
j j j ji i i
j
MSE t s t s t t s t s t tK =
= − + − +∑ ,
0,1,2,i CI= (75)
where 1, ,100K = , ( ) ( )js t or ( )ˆ ( | 1)j
is t t + denotes the jth realization of ( )s t or ˆ ( | 1)is t t + . According to the ergodicity of the sampled correlated function, it yields that 0 0( ) tr (1), ( ) tr (1), 1, 2i iiMSE t P MSE t P i→ → = (76)
( ) tr (1)CI CIMSE t P→ , ,K t→ ∞ → ∞ (77)
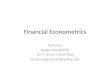
The Monte-Carlo simulation results are shown in Fig. 1.
:The MSE curve of the local smoother for sensor 1
:The MSE curve of the local smoother for sensor 2 :The MSE curve of the fused smoother weighted by matrix :The MSE curve of the CI fusion smoother
Figure 1. The comparison between MSE curves and the trace lines
Fig.1 shows that the values of 0 ( ), ( ), 1,2iiMSE t MSE t i = are close to the corresponding trace 0tr (1), tr (1)iiP P , which verifies the ergodicity (66). It also can be seen that
( ) tr (1)CI CIMSE t P< . According to the ergodicity (77), it yields tr (1) tr (1)CI CIP P< . It verifies (1)CIP is a upper bound of (1)CIP . Moreover, it can be seen that the CI fuser has good performance, whose accuracy is close to the accuracy of the optimal information fusion smoother weighted by matrices.
In order to give a powerful geometric interpretation with respect to accuracy relations of the local and the fused Wiener signal smoothers, Fig. 2 shows the covariance ellipse curves for the variance matrices, which are defined as the locus of points T 1{ : }x x P x c− = , where P is the covariance matrix and c is a constant. Generally, we select 1c = .
It has been proved in [6,11] that A B≤ is equivalent to the fact that the covariance ellipse of A is enclosed in that of B . Then from Fig. 2, it shows that the intersection region of the covariance ellipses formed by 11(1)P and 22 (1)P is enclosed in
11tr (1)P22tr (1)P
tr (1)CIPtr (1)CIP
0tr (1)P
1451

the ellipse of the covariance (1)CIP , which passes the intersection points of the ellipses of the covariance 11(1)P and
22 (1)P . If the cross-covariance 12 (1)P is known, the ellipse of the covariance 0 (1)P is enclosed in that intersection region. It supports (68). Moreover, the ellipse formed by the covariance
(1)CIP is enclosed in that formed by (1)CIP , which verifies (67).
Figure 2. The accuracy comparison of (1), 0,1, 2,iP i CI= and (1)CIP by covariance ellipses
B. CI Fusion Wiener Signal filter The traces of the error variance of the local Wiener signal
filters and the optimal information fusion Wiener signal filter, and the traces of the theoretical and the real CI fusion variances are compared in Table II.
TABLE II. ACCURACY COMPARISON AMONG THE TRACES OF THE LOCAL AND THE FUSED WIENER SIGNAL FILTTERS
11tr (0)P 22tr (0)P 0tr (0)P tr (0)CIP tr (0)CIP
0.4407 0.4588 0.3480 0.4266 0.3587
The Monte-Carlo simulation results are shown in Fig. 3.
:The MSE curve of the local filter for sensor 1
:The MSE curve of the local filter for sensor 2 :The MSE curve of the fused filter weighted by matrix :The MSE curve of the CI fusion filter
Figure 3. The comparison between MSE curves and the trace lines
Fig.3 shows that the CI fuser has good performance, whose accuracy is close to the accuracy of the optimal information fusion filter weighted by matrices.
Fig. 4 shows the covariance ellipse curves for the variance matrices.
Figure 4. The accuracy comparison of (0), 0,1, 2,iP i CI= and (0)CIP by covariance ellipses
C. CI Fusion Wiener Signal predictor The traces of the error variance of the local Wiener signal
predictors and the optimal information fusion Wiener signal predictor, and the traces of the theoretical and the real CI fusion variances are compared in Table III.
TABLE III. ACCURACY COMPARISON AMONG THE TRACES OF THE LOCAL AND THE FUSED WIENER SIGNAL PREDICTORS
11tr ( 1)P − 22tr ( 1)P − 0tr ( 1)P − tr ( 1)CIP − tr ( 1)CIP −
0.5381 0.5407 0.4436 0.5289 0.4596
The Monte-Carlo simulation results are shown in Fig. 5.
:The MSE curve of the local predictor for sensor 1
:The MSE curve of the local predictor for sensor 2 :The MSE curve of the fused predictor weighted by matrix :The MSE curve of the CI fusion predictor
Figure 5. The comparison between MSE curves and the trace lines
Fig. 6 shows the covariance ellipse curves for the variance matrices.
VI. CONCLUSION For the two-sensor multichannel ARMA signal systems
with time delays, applying the embedded-time-delay ARMA
11tr (1)P22tr (1)P tr (1)CIP
tr (1)CIP0tr (1)P
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
11 (1)P
22 (1)P
(1)CIP(1)CIP
0 (1)P-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
11(0)P
22 (0)P
(0)CIP
(0)CIP
0 (0)P
22tr ( 1)P −11tr ( 1)P − tr ( 1)CIP −
tr ( 1)CIP −0tr ( 1)P −
1452

innovation model, based on the modern time series analysis method, the local, the optimal and the CI fusion Wiener signal estimators are presented. It is rigorously proved that the accuracies of the presented CI fusion Wiener signal estimators are higher than those of local signal estimators, and less than those of the optimal information fusion Wiener signal estimators with known cross covariance. Monte Carlo simulation results show the accuracy of CI fusion is close to that of the optimal signal fuser. The covariance ellipse curves show the geometric interpretation of the accuracy relation.
Figure 6. The accuracy comparison of ( 1), 0,1, 2,iP i CI− = and ( 1)CIP − by covariance ellipses
ACKNOWLEDGMENT The authors want to thank for National Nature Science
Foundation under Grant 60874063, Science Foundation of Distinguished Young Scholars of Heilongjiang University,
Open Fund of Key Laboratory of Electronics Engineering, College of Heilongjiang Province (Heilongjiang University) under Grant DZZD20100004, Key Laboratory of Automation of Heilongjiang University.
REFERENCES [1] X. Lu, H. S. Zhang, W. Wang, K. L. Teo, “Kalman filtering for multiple
time-delay systems,” Automatica, vol. 41, pp. 1455-1461, August 2005. [2] T. Kailath, A. H. Sayed, B. Hassibi, Linear Estimation. Upper Saddle
River, NJ: Prentice-Hall, 2000. [3] B. D. O. Anderson, J. B. Moure, Optimal filtering. Englewood Cliffs, NJ:
Prentice-Hall, 1979. [4] Z. L. Deng, Information Fusion Filtering Theory with Applications.
Harbin: Harbin Institute of Technology, 2007. [5] S. J. Julier, J. K. Uhlmann, “A non-divergent estimation algorithm in the
presence of unknown correlations,” Proceddings of 1997 IEEE American Control Conference, Albuquerque, NM, USA, 1997, pp. 2369-237.
[6] C. Z. Han, H. Y. Zhu, Z. S. Duan, Multi-source Information Fusion. Beijing: Tsinghua University Press, 2006.
[7] X. J. Sun, Z. L. Deng, “Information fusion Wiener filter for the multisensor multichannel ARMA signals with time-delayed measurements,” IET Signal Processing, vol. 3, pp. 403-415, September 2009.
[8] Q. Gan, C. J. Harris, “Comparison of two measurement fusion methods for Kalman-filter-based multisensor data fusion,” IEEE Trans. Aerospace and Electronic Systems, vol. 37, pp. 273-279, January 2001.
[9] M. Gevers, W. R. E. Wouters, “An innovations approach to discrete-time stochastic realization problem,” Quartely Journal on Automatic Control, vol. 19, pp. 90-110, 1978.
[10] Y. X. Yuan, W. Y. Sun, Optimization Theory and Method. Beijing: Science Press, 2003.
[11] Z. L. Deng, P. Zhang, W. J. Qi, J. F. Liu, Y. Gao, “Sequential covariance intersection fusion Kalman filter,” Information Sciences, vol. 189, pp. 293-309, 2012.
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
11( 1)P −
22 ( 1)P −
( 1)CIP −
( 1)CIP −
0 ( 1)P −
1453