EL 3015 SISTEM KENDALI
EL 3015 SISTEM KENDALIControl SystemsSM II 2014/15
Carmadi Machbub (Kelas 1)Iyas Munawar (Kelas 2)Pranoto Hidaya
Rusmin (Kelas 3)
111st Course: INTRODUCTIONControl systems surrounding us History
technology and theoryControl system configurationsTopics and
courses organization- Syllabus- References- Pre-requisites - Labs-
Learning outcomesAssessment 22Control systems surrounding us
Float valve (flush toilet, water tank, liquid level system)Air
conditionning, liftDisk, CD, DVD, hard disk, Washing machinesCar -
vehicle: power steering, anti-lock braking system (ABS), suspension
control, energy management system
33Machine toolsElectrical power control system: power
generation, load-frequency control, .....Industrial control (car,
chemical, )Internet control (congestion control, ...), control over
internet (wireless sensor, ..)Antenna control, radar control,
Mobile robot, humanoid robot, robot soccer, under water robot,
..Air craft control, rocket control, satellite control, missile
control
etc.
44Natural control systems:In human body: blood circulation
control (glucose, acid uric, nutrition, etc.)Bird flying
control,...Swarming formation
55History technology and theory[Franklin, Nise, Ogata]Chronicle:
since 300 BC until the Middle Ages, found in Greek, China and the
Middle East (Bagdad): control of fluid flow rate to regulate a
water clock and the control of liquid level using the float
valve.1620: Cornellis Drebbel invented a system to control the
temperature of a furnace used to heat an incubator for hatching
chicken eggs.1788: Fly-ball governor of James Watt for his famous
steam engine to control the steam flow.
661868: Maxwell, Flyball stability analysis1877: Routh,
Stability1890: Lyapunov, Nonlinear stability1910: Sperry, Gyroscope
and autopilot1922: Minorsky, Steering ships, stability from
differential equations1927: Black, Feedback electronic amplifier;
Bush, Differential analyzer1932: Nyquist, Nyquist stability
criterion1934: Hazen, Servomechanism1938: Bode, Frequency response
methods1940s: Ziegler and Nichols, Tuning rules PID
controllers1942: Wiener, Optimal filter design. Cybernetics concept
was also introduced by him.771947: Hurewicz, Sampled data systems
Nichols, Nichols chart1948: Evans, Root locus1950: Kochenberger,
Nonlinear analysis1956: Pontryagin, Maximum principle1957: Bellman,
Dynamic programming1960: Draper, Inertial navigation Kalman,
Optimal estimation1965: Zadeh, Fuzzy logic 1969: Hoff,
Microprocessor.88Control theory developmentUntil late of 1950 the
classical control theory had been developped based on
calculus/ordinary differentian equation representing the single
input-single output (SISO) linear model of systems. Laplace
transformation of the model to a transfer function permit us to
make system analysis and design in the frequency domain. Since the
early 1960 the so called modern control theory was also developped.
System under consideration is represented in a set of first ODE and
forms a state space equation of multi-input multi-output (MIMO)
system.
The development of computing machines has push this approach and
now combination of both approach give many contibution to the
development of control theory and application. 99The optimal
control theory for deterministic system as well as for stochastic
system have beed developped in the period of 1980.In the period of
1990, robust control was developped.1990- until now: learning based
controller, intelligent control, agent/multi-agent controllerFast
internet, cloud computing, WSN etc. make us possible to solve
complex , large, even multi-layer system.
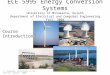
10System configurationsOpen loop and closed loop systems11
SYSTEMinputoutput11Open loop and closed loop systems[Nise]12
12Closed loop system state space representation[Franklin]13
13Closed loop digital system14
14Design procedureProblem formulation and specificationModeling
and representation- Functional scheme- Mathematical modeling
(differential equation, transfer function)- Block diagram and
simplificationAnalysis- Time response and frequency response- Root
locus and Bode plot analysisDesign- Roots location based on desired
spec.- Gap between desired location of roots and those of the
plant.- Compensator designImplementation, testing and fine
tuning1515Antenna azimuth position control [Nise]16
1617
17Short syllabus [Curr. 2013]The course covers control systems
analysis and design for linear systems in case of stability or
performance. System analysis and design are implemented using
traditional approach in time and frequency domain. Introduction to
concept of state space and digital control system are also provided
in the course.1818Learning outcomesAbility to analyse and design of
control system concepts including modeling, transient analysis,
steady-state and linier systems stability, and designing control
system in time and frequency domain.Ability to use state space
concept for modelling and its connection with transfer function
modelAbility to analyze and design of simple digital control
system1919SyllabusBasic elements of a control system, concept of
feedback, open and closed-loop systemsMathematical modeling of
physical SISO systems, linearized models, and transfer
functionTime-domain analysis and stability of control systemsPID
controller design for SISO systemsFeedback control system analysis
& design via root-locus methodFeedback control system analysis
& design via frequency domain method.Introduction to sampled
data systems, discrete equivalents, and sample rate
selection.Introduction to state space representation, analysis and
design
2020Pre-requisites and related activitiesEL2007 Signal and
systems (pre-requisite)EL3215 Practical Lab.
(co-requisite)Matlab2121Main referencesNorman S. Nise, Control
System Engineering, John Wiley, 2011, 6th editionKatsuhiko Ogata,
Modern Control Engineering, Prentice Hall, 2010, 5th edition
2222Assessment2323ScheduleMonday, 11.00 12.40 (LSKK)Thursday,
9.00-10.40 (LSKK)
ME 1: Thursday, 8st weekME 2: Thursday, 15st weekFE : Comply to
UAS schedule given by ITB
24Compensator
Plant
D(s)
G(s)
y
u
e
r
-
+
-
r
y
+
u
x
Estimator
plant
-K
H
Control law
controller
plant
D(s)
G(s)
y
u
e
r
-
+