Embed Size (px)
Citation preview

ICARUS AUTOMATIC LANDING PAD
PREPARED FOR DAVID GITZ AND FAST ROBOTICS COMPANY

PROJECT NUMBER: S11-63-ICARUSLPTEAM 63 MEMBERS
Cory Fulkerson (Project Manager) - Mechanical EngineerJohn Graham - Computer EngineerClayton Hooks - Electrical EngineerO’Raphael Okoro - Electrical EngineerTyler Wilson - Mechanical Engineer
Dr. Pourboghrat – Faculty Technical Advisor

PRESENTATION OUTLINE
•Executive Summary - John Graham•Literature Review Summary – Tyler Wilson•Detailed Project Description – Clayton Hooks•Completion Plan – O’Raphael Okoro•Required Items – Clayton Hooks•Summary – Cory Fulkerson

Executive Summary Automatic Landing Pad (ALP) is designed to track and
charge the ICARUS quad rotor flying craft. Designed for Fast Robotics
David Gitz
Solar panel energy collection system
Direct contact charging
Backpack carrying system

Client: Fast Robotics
Faculty Technical Advisor: Farzad Pourboghrat
Project Manager:Cory Fulkerson
Mechanical EngineeringResponsibilities:
Chassis subsystem
Tyler WilsonMechanical Engineering
Responsibilities:Transportation subsystem
Clayton HooksElectrical Engineering
Responsibilities:Control system hardware, Energy delivery
subsystem
O'Raphael OkoroElectrical Engineering
Responsibilities:Energy collection subsystem
John GrahamComputer Engineering
Repsonsibilities:Control system software

At the end of the fall semester the client will receive:Working ALP prototypeAll design schematics for boards/circuitsAll code for landing softwareSchematics for chassis system
Total expected prototype cost: $1130

LITERATURE REVIEW SUMMARY

Subsystems Power System
Energy Collection and StorageEnergy Delivery
Control SystemHardwareSoftware
Mechanical SystemChassisTransport

Energy Collection Due to the need for portability, an outside
energy source is needed. Solar Panels are main focus of collection subsystem.
Based on amount of energy delivered to the vehicle and the time required to recover energy from sun about 14 watts is needed.
Energy Storage Due to varying charging periods a storage
system must be implemented. With 1 hour flight time/charge time a 9 hour
mission would require 240 watt-hours. Thus, a battery will be used to store energy
within the ALP.

Control System In order to communicate with craft in flight, a
GPS system must be used to locate the helicopter from the pad. A small camera on the craft locates GPS and flies to location.
Switches to close range landing device once close enough to the landing pad.
In order to communicate with the craft, a controller is needed.

Control System Cont’d Many controller forms are being considered
from microcontrollers to single-board computers.

Chassis Ultimately, the chassis will house all electrical
components and provide a landing surface for the craft.
Different materials were researched on the basis of cost and how well it would hold up under different weather conditions. ABS plastic seems to be best choice.
Solar panels will be mounted on top of the chassis using drawer slides allowing the pad to be more compact for transport.

Transport Tree-Stand back pack straps proved to be able
to carry heavier weights while still giving comfort to the transporter.
Should be able to be either detached or moved off to the side to give the ALP a more level landing surface.

PROJECT DESCRIPTION

Major Systems of the ICARUSLP
System Level Diagram
Power Control Mechanical
Energy DeliverySubsystem
Energy CollectionSubsystem
CO
NT
RO
L
Chassis Structure
Control System Software
Control System Hardware
CO
NT
RO
L
POWER
PO
WE
R
TO
VE
HIC
LEB
AT
TE
RY
Transport Mechanism
SENSING ANDCOMMUNICATION
SO
LAR
EN
ER
GY
EX
TE
RN
AL
CH
AR
GE
R

Power System
Energy Collection Collect energy from solar array Store energy in battery
Energy Delivery Supply power to control system Deliver energy to vehicle battery via contacts
Photovoltaic Array
Charge Controller
Offline Charger
Rectifier
Boost Converter
Buck Converter
Equalizer
3.3v LDO Supply
5v Buck Supply
VRLA Battery
ENERGY DELIVERY SUBSYSTEM
ENERGY COLLECTION SUBSYSTEM
Vehicle Side
Pad Side

Control System
SoftwareLocationLandingSequencing
HardwareRadioGPSVision
Controlling Computer
Camera
GPS Unit
Radio
USB Hub Controller
FT232
FT232FT232
Communication Function
Main Function
CONTROL SYSTEM SOFTWARE
CONTROL SYSTEMHARDWARE GPIO
Controller
LED Array(on vehicle)
ChargingFunction
ActivationFunction
GPS TrackingFunction
TrackingFunction
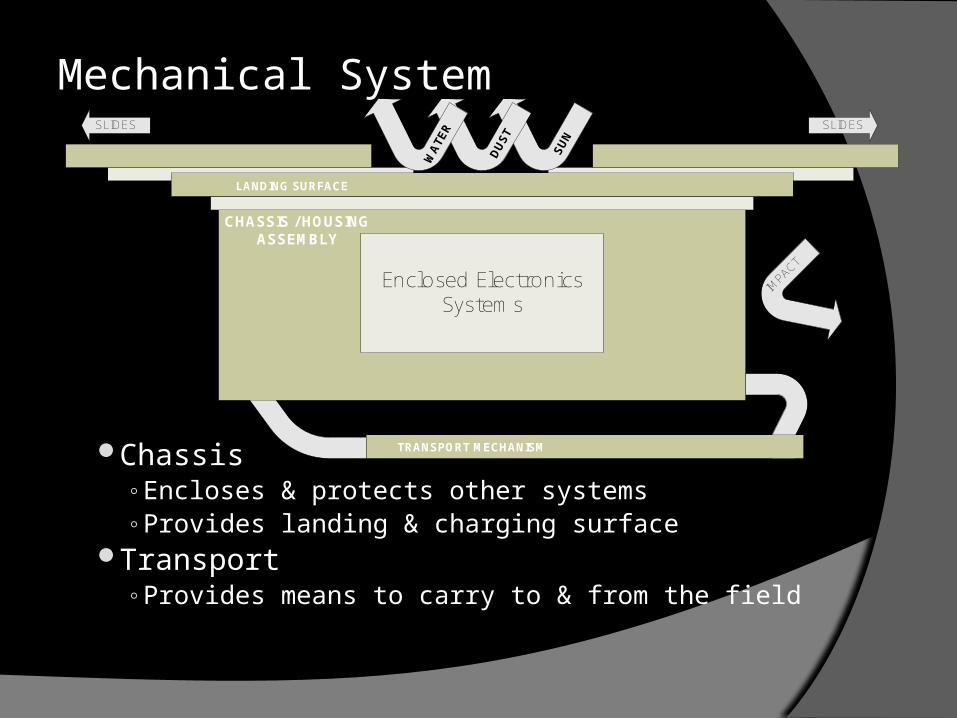
Mechanical System
SU
N
DU
ST
Enclosed Electronics Systems
SLIDES
WA
TER
CHASSIS / HOUSINGASSEMBLY
IMPACT
LANDING SURFACE
TRANSPORT MECHANISM
SLIDES
Chassis ◦Encloses & protects other systems◦Provides landing & charging surface
Transport ◦Provides means to carry to & from the field

Completed up to Date Finished Preliminary CAD design drawings for Chassis Performed testing for the camera of the navigation
system All of the assemblies have been simulated for the power
systems

Action Item List Project: ICARUS: Automatic Landing Pad Sec Ref #: S11-63-ICARUSLP
Action Item List
Team Members: Hrs. Worked are on the second sheetCory Fulkerson, ME (PM) John Graham, CpE Date: 22-Feb-11Clayton Hooks, EEO'Rapheal Okoro, EETyler Wilson, ME
# Activity Person Assigned Due New Due Status Comments1 Finalize CAD Drawings CF 21-Aug 28-Aug
2Finalize Hardware Deisgn for Energy Collection OO 21-Aug 28-Aug
3Finalize Hardware Design for Energy Delivery CH 21-Aug 28-Aug
4Create C++ Code for Navigation System JG 21-Aug 28-Aug
5 Finalize Transportation Design TW 21-Aug 28-Aug
7Perform Stress Analysis/Begin Construcing Chassis CF 28-Aug 4-Sep
8Assemble Chassis Wiring Harness OO 28-Aug 4-Sep
9
Complete Schematic Capture, PCB Layout, CAM Generation/Begin Fabricating Power Delivery Prototypes CH 28-Aug 4-Sep
10Test Navigation System with Hardware to ensure compatibility JG 28-Aug 4-Sep
11Assmble Transportation System to Chassis TW 28-Aug 4-Sep

Summarized Action Item List Order Parts Finalize CAD drawings for Mechanical Systems Finalize Schematics for Electrical Systems Finalize C++ code for Navigation Systems Construct Hardware for Subsystems Troubleshoot Subsystems Combine Subsystems to build Landing Pad Troubleshoot Landing Pad Complete all required Documentation Prepare Final Presentation

Timeline Dates 21-Aug 28-Aug 4-Sep 11-Sep 18-Sep 25-Sep 2-Oct 9-Oct 16-Oct 23-Oct 30-Oct 6-Nov 13-Nov 20-NovWeek 1 2 3 4 5 6 7 8 9 10 11 12 13 14ActionDesign and Construction PhaseFinalize CAD drawings and Electical Schematics
Order Parts
Construct Chassis
Build Chargers/Controllers
Build Navigational System
Testing and Troubleshooting PhaseTest Landing Pad Charger
Test Vehicle Charger
Test Transporation System
Test Chassis
Troubleshoot/correct problems
Documentationa and Report StagePrepare All Documentaion, Poster, Final Presentation

Summarized Timeline For Fall 2011
Preparation Phase (Before Fall Semester) Order Parts
Design and Construction Phase 1 (Week 1-Week 4)Finalize all CAD drawings, Electrical Schematics and
Software Construct Hardware for Subsystems
Testing and Troubleshooting Phase 1 ( Week 5-Week 7) Test individual Subsystems Troubleshoot subsystemsBegin completing all required documentation

Summarized Timeline For Fall 2011
Design and Construction Phase 2 (Week 8)Combine Subsystems to build Landing Pad
Testing and Troubleshooting Phase 2 (Week 9 and Week 10)Test Landing PadTroubleshoot Landing Pad Complete all required documentation
Documentation and Report Stage(Week 11-Week 14)Finish Required Posters Prepare Final Presentations

Required Items
Power System Control SystemMechanical System
Fabrication ResourcesShipping
Total
$345$425$135
$70$155
$1130

OVERVIEWThe ICARUS Automatic Landing Pad (ALP) will provide a secondary recharge opportunity for the ICARUS vehicle when out in the field during missions which will extend the range of the vehicle as well as increase mission duration.
In order to finish on time we will follow the tentative timeline as closely as possible which accounts for unexpected delays and allows plenty of time for testing and troubleshooting.

THANK YOU
QUESTIONS?
















![[Ici&itd] electrical engineer](https://img.dokumen.tips/doc/110x75/55d381fabb61eb3f048b46d3/iciitd-electrical-engineer.jpg)










