Embed Size (px)
Citation preview

Convergence at the Extremes –
HPDC meets Tiny Networked Sensors
David Culler Computer Science Division
U.C. BerkeleyIntel Research @ Berkeley
www.cs.berkeley.edu/~culler

8/8/2001 HPDC 2
Characteristics of the Large• Concurrency intensive
– data streams and real-time events, not command-response
• Communications-centric
• Limited resources (relative to load)
• Huge variation in load
• Robustness (despite unpredictable change)
• Hands-off (no UI)
• Dynamic configuration, discovery– Self-organized and reactive control
• Similar execution model (component-based events)
• Complimentary roles (eyes/ears of the grid)
• Huge space of open problems
...and Small

8/8/2001 HPDC 3
Emerging Microscopic Devices
• CMOS trend is not just Moore’s law
• Micro Electical Mechanical Systems (MEMS)– rich array of sensors are becoming cheap and tiny
• Imagine, all sorts of chips that are connected to the physical world and to cyberspace! LNA
mixerPLL basebandfilters
I Q
• Low-power Wireless Communication

8/8/2001 HPDC 4
Disaster Management
Circulatory Net
What can you do with them?
• Embed many distributed devices to monitor and interact with physical world
• Network these devices so that they can coordinate to perform higher-level tasks.
=> Requires robust distributed systems of hundreds or thousands of devices.
Habitat Monitoring

8/8/2001 HPDC 5
Getting started in the small
• 1” x 1.5” motherboard– ATMEL 4Mhz, 8bit MCU, 512 bytes RAM, 8K pgm flash– 900Mhz Radio (RF Monolithics) 10-100 ft. range– ATMEL network pgming assist– Radio Signal strength control and sensing– I2C EPROM (logging)– Base-station ready (UART)– stackable expansion connector
» all ports, i2c, pwr, clock…
• Several sensor boards– basic protoboard– tiny weather station (temp,light,hum,prs)– vibrations (2d acc, temp, light)– accelerometers, magnetometers, – current, acoustics

8/8/2001 HPDC 6
Emerging execution model (at large)
• Application is graph of event-driven components– robust to huge surges in demand
read headerread
headerread header
exec
read headercache
check
read header
cachemiss
read headerwrite
resp
0
500
1000
1500
2000
2500
1 10 100 1000 10000
# threads executing in server (T)
max
serv
er th
roug
hput
(S ta
sks/s
ec)
1-w ay Java
4-w ay Java
0
1000
2000
3000
4000
5000
6000
1 10 100 1000 10000
# tasks in client-server pipeline
max
serv
er th
roug
hput
(S ta
sks/s
ec)
1-way Java
4-way Java

8/8/2001 HPDC 7
...and in the small
RFM
Radio byte
Radio Packet
UART
Serial Packet
ADC
Temp photo
Active Messages
clocks
bit
by
tep
ac
ke
t
Route map router sensor appln
ap
pli
ca
tio
n
HW
SW
Example: ad hoc, multi-hop routing of photo sensor readings

8/8/2001 HPDC 8
A Operating System for Tiny Devices?
• Traditional approaches– command processing loop (wait request, act, respond)
– monolithic event processing
– bring full thread/socket posix regime to platform
• Alternative– provide framework for concurrency and modularity
– never poll, never block
– interleaving flows, events, energy management
– allow appropriate abstractions to emerge
8/8/2001 HPDC 9
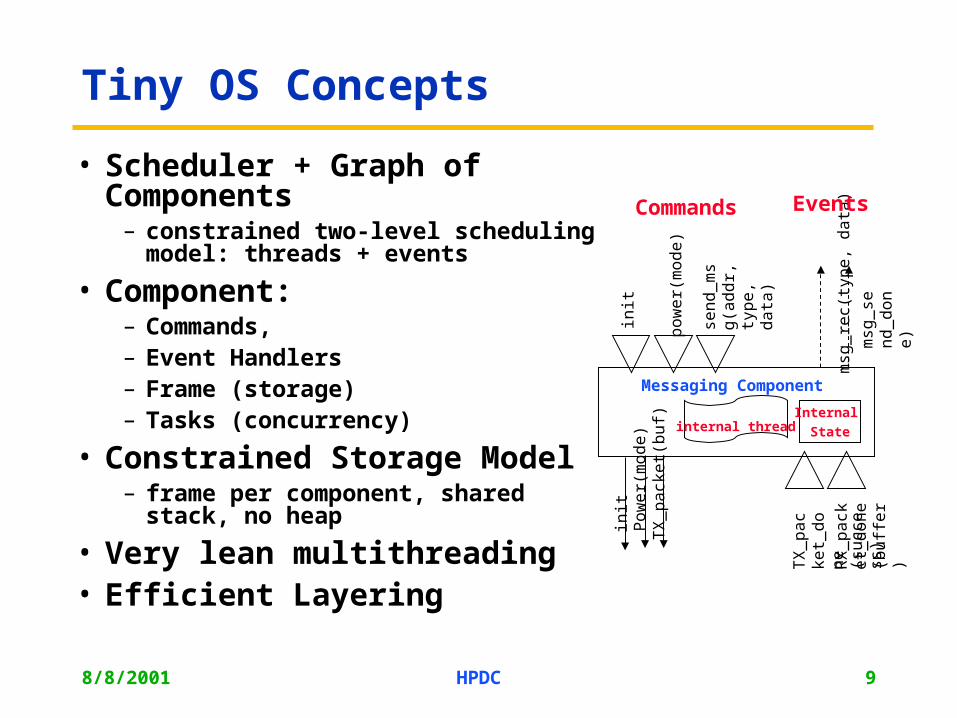
Tiny OS Concepts
• Scheduler + Graph of Components
– constrained two-level scheduling model: threads + events
• Component:– Commands, – Event Handlers– Frame (storage)– Tasks (concurrency)
• Constrained Storage Model– frame per component, shared stack, no
heap
• Very lean multithreading• Efficient Layering
Messaging Component
init
Po
we
r(m
od
e)
TX
_p
ack
et(
bu
f)
TX
_p
ack
et_
do
ne
(s
ucc
ess
)RX
_p
ack
et_
do
ne
(b
uff
er)
Internal
State
init
po
we
r(m
od
e)
sen
d_
msg
(ad
dr,
ty
pe
, d
ata
)
msg
_re
c(ty
pe
, d
ata
)
msg
_se
nd
_d
on
e)
internal thread
Commands Events

8/8/2001 HPDC 10
TinyOS Execution Contexts
Hardware
Interrupts
eve
nts
commands
Tasks

8/8/2001 HPDC 11
TOS Execution Model
• commands request action– ack/nack at every boundary
– call cmd or post task
• events notify occurrence– HW intrpt at lowest level
– may signal events
– call cmds
– post tasks
• Tasks provide logical concurrency
– preempted by events
• Migration of HW/SW boundary
RFM
Radio byte
Radio Packet
bit
by
tep
ac
ke
t
event-driven bit-pump
event-driven byte-pump
event-driven packet-pump
message-event driven
active message
application comp
encode/decode
crc
data processing

8/8/2001 HPDC 12
Dynamics of Events and Threads
bit event filtered at byte layer
bit event => end of byte =>
end of packet => end of msg send
thread posted to start
send next message
radio takes clock events to detect recv

8/8/2001 HPDC 13
Event-Driven Sensor Access Pattern
• clock event handler initiates data collection• sensor signals data ready event• data event handler calls output command
• common pattern
char TOS_EVENT(SENS_OUTPUT_CLOCK_EVENT)(){
return TOS_CALL_COMMAND(SENS_GET_DATA)();
}
char TOS_EVENT(SENS_DATA_READY)(int data){
return TOS_CALL_COMMAND(SENS_OUTPUT_OUTPUT)((data >> 2) &0x7);
}

8/8/2001 HPDC 14
Tiny Active Messages
• Sending– Declare buffer storage in a
frame– Request Transmission– Naming a handler– Handle Completion signal
• Receiving– Declare a handler– Firing a handler
» automatic » behaves like any other
event
• Buffer management– strict ownership exchange– tx: done event => reuse– rx: must rtn a buffer
TOS_FRAME_BEGIN(INT_TO_RFM_frame) {
char pending;
TOS_Msg msg;
}
TOS_FRAME_END(INT_TO_RFM_frame);
. . .
ok = TOS_COMMAND(SUB_SEND_MSG)(TOS_MSG_BCAST, AM_MSG(INT_READING), &VAR(msg)))
...char TOS_EVENT(SUB_MSG_SEND_DONE)(
TOS_MsgPtr sentBuffer){...}
TOS_MsgPtr TOS_MSG_EVENT(INT_READING)(TOS_MsgPtr val){
...
return val;
}

8/8/2001 HPDC 15
Example: multihop network discovery
• message handler: – if this is a ‘new’ discover message,
» record its source as parent
» retransmit with self as source

8/8/2001 HPDC 16
Network Discovery: Radio Cells

8/8/2001 HPDC 17
Network Discovery

8/8/2001 HPDC 18
Multihop Network Topology

8/8/2001 HPDC 19
Storage Breakdown (C Code)
0
500
1000
1500
2000
2500
3000
3500
4000
Multihop Router
AM light
AM Temp
AM
Packet
Radio Byte
RFM
Photo
Temp
UART Packet
UART
i2c
Init
TinyOS Scheduler
C Runtime
3450 B code 226 B data

8/8/2001 HPDC 20
DARPA-esq demo
• UAV drops nodes along road,– hot-water pipe insulation for package
• Nodes self configure into linear network
• Calibrate magnetometers
• Each detects passing vehicle
• Share filtered sensor data with 5 neighbors
• Each calculates estimated direction & velocity
• Share results
• As plane passes by, – joins network
– upload as much of missing dataset as possible from each node when in range
• 7.5 KB of code!

8/8/2001 HPDC 21
Cory Energy Monitoring/Mgmt System
• 50 nodes on 4th floor• 5 level ad hoc net• 30 sec sampling• 250K samples to database over 6 weeks

8/8/2001 HPDC 22
Energy Monitoring Network Arch
sensor net
GW GW
802-11
control net
GW
20-ton chiller
PC
scada term
modbus
UCB power monitor net
PC telegraphMYSQL
Browser
8/8/2001 HPDC 23
Huge Space of Open Problems
• Working across levels of abstractions– ex: DC-balanced packet encoding– low-power listening– CSMA MAC for highly correlated traffic– adaptive transmission control when every node is originating
and forwarding traffic– Packets can carry time and place information– implicit network discovery
• Scale– ex: discovery for 1,000 nodes with ~30 per ‘cell’
» probabalistic flooding
• Long term management– sleep/wakeup when need to be awake to hear– in situ network programming– operating within ambient energy envelop

8/8/2001 HPDC 24
Larger Challenges
• Security / Authentication / Privacy
• Programming support for systems of generalized state machines
– language, debugging, verification
• Simulation and Testing Environments
• Programming the unstructured aggregates
• Resilient Aggregators
• Understanding how an extreme system is behaving and what is its envelope
– adversarial simulation
• Constructive foundations of self-organization

8/8/2001 HPDC 25
and of course
• Mobility
• Efficiency
• Application execution resource estimation
• Automatically interface networks of tiny devices with grid frameworks

8/8/2001 HPDC 26
To learn more
• http://www.cs.berkeley.edu/~culler
• http://tinyos.millennium.berkeley.edu/
• http://webs.cs.berkeley.edu/
• http://ninja.cs.berkeley.edu/

8/8/2001 HPDC 27

8/8/2001 HPDC 28
Typical application use of tasks
• event driven data acquisition
• schedule task to do computational portion
char TOS_EVENT(MAGS_DATA_EVENT)(int data){
struct adc_packet* pack = (struct adc_packet*)(VAR(msg).data);
printf("data_event\n");
VAR(reading) = data;
TOS_POST_TASK(FILTER_DATA);
...
• 128 Hz sampling rate• simple FIR filter• dynamic software tuning for centering the magnetometer signal (1208 bytes)
• digital control of analog, not DSP• ADC (196 bytes)

8/8/2001 HPDC 29
Tasks in low-level operation
• transmit packet– send command schedules task to calculate CRC– task initiated byte-level datapump– events keep the pump flowing
• receive packet– receive event schedules task to check CRC– task signals packet ready if OK
• byte-level tx/rx– task scheduled to encode/decode each complete byte– must take less time that byte data transfer
• i2c component– i2c bus has long suspensive operations– tasks used to create split-phase interface– events can procede during bus transactions

8/8/2001 HPDC 30
Deadline avoidance
• Pipelines transmission – transmits single byte while encoding next byte
• Trades 1 byte of buffering for easy deadline• Separates high level latencies from low level
real-time requirements• Encoding Task must complete before byte
transmission completes• Decode must complete before next byte arrives
Encode Task
Bit transmission Byte 1
Byte 2
RFM Bits
Byte 2
Byte 1 Byte 3
Byte 3
Byte 4
start …





























