Embed Size (px)
Citation preview

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 1/147
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
CAMPUS DE CURITIBA
DEPARTAMENTO DE PESQUISA E PÓS-GRADUAÇÃO
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
E DE MATERIAIS - PPGEM
Francisco José Doubrawa Filho
CONTROLE DE VIBRAÇÃO FLEXIONAL EM SISTEMASGIRANTES UTILIZANDO NEUTRALIZADORES DINÂMICOS
VISCOELÁSTICOS
Curitiba
JUNHO - 2008

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 2/147
Francisco José Doubrawa Filho
CONTROLE DE VIBRAÇÃO FLEXIONAL EM SISTEMASGIRANTES UTILIZANDO NEUTRALIZADORES DINÂMICOS
VISCOELÁSTICOS
Dissertação apresentada como requisito parcialà obtenção do título de Mestre em Engenharia,do Programa de Pós-Graduação em Engenha-ria Mecânica e de Materiais, Área de concen-tração em Mecânica dos Sólidos e Vibrações,do Departamento de Pesquisa e Pós Graduação,
do Campus de Curitiba da UTFPR.
Orientador:
Prof. Carlos Alberto Bavastri, Dr. Eng.
Curitiba
JUNHO - 2008

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 3/147
TERMO DE APROVAÇÃO
Francisco José Doubrawa Filho
CONTROLE DE VIBRAÇÃO FLEXIONAL EM SISTEMASGIRANTES UTILIZANDO NEUTRALIZADORES DINÂMICOS
VISCOELÁSTICOS
Esta Dissertação foi julgada para a obtenção do título de mestre em engenharia, Área deconcentração em Mecânica dos Sólidos e Vibrações, e aprovada em sua forma final pelo Pro-
grama de Pós-Graduação em Engenharia Mecânica e de Materiais.
Prof. Neri Volpato, Dr. Eng.Coordenador de Curso
BANCA EXAMINADORA
Prof. Carlos Alberto Bavastri, Dr. Eng.Universidade Tecnológica Federal do Paraná
Prof. Hans Ingo Weber, Dr. Eng.Pontifícia Universidade Católica do Rio de
Janeiro
Prof. Jucélio Tomás Pereira, Dr. Eng.Universidade Tecnológica Federal do Paraná
Prof. Marco Antônio Luersen, Dr. Eng.Universidade Tecnológica Federal do Paraná
Curitiba, 30 de Junho de 2008

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 4/147
iii
In Memoriam:
Dedico este trabalho ao meu pai Francisco José Doubrawa,
Mecânico autodidata que esteve à frente do seu tempo e sem-
pre me incentivou no gosto pela matemática e física.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 5/147
iv
AGRADECIMENTOS
A minha família pela compreensão e apoio nos momentos de ausência.
Ao meu orientador Prof. Carlos Alberto Bavastri que aceitando um desafio, conse-
guiu com paciência, amizade e esforço fazer com que este trabalho se concretizasse.
Ao Prof. Jucélio Tomás Pereira outro gigante incansável mestre, que com seu infa-
lível “kit multimídia” conseguiu transmitir relevantes informações nas suas aulas.
Ao Prof. Marco Antonio Luersen, pelos conhecimentos transmitidos em otimização
e pela presença nas defesas e apresentações.
Especialmente ao meu amigo Hideraldo Luis Vasconcelos do Santos pelas medi-
ções, suporte técnico e companheirismo, sem os quais as dificuldades seriam muito
maiores.
Ao pessoal do LAVIB, principalmente Aleksander Kokot e Eduardo Afonso Ribeiro
pela boa vontade nas montagens e medições.Ao Programa de Pós-Graduação em Engenharia Mecânica e de Materiais, pela
infra-estrutura tornada disponível para o desenvolvimento deste e de outros tra-
balhos, e ao seu pessoal técnico e administrativo, que de uma forma ou de outra,
acabou por participar deste trabalho.
A WEG Equipamentos Elétricos S.A. - Máquinas, na pessoa do Sr. Fredemar Rün-
cos, por autorizar minha ausência do trabalho nos períodos de aula.
Ao MCT/FINEP/FNDCT - Chamada PROMOVE - Laboratórios de Inovação -Convênio 4931/06 e à empresa WEG Equipamentos Elétricos S.A. pelo apoio fi-
nanceiro no desenvolvimento deste trabalho.
A todos que contribuíram para esta dissertação.

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 6/147
v
DOUBRAWA FILHO, Francisco José, Controle de Vibração Flexional em Sistemas Gi-
rantes Utilizando Neutralizadores Dinâmicos Viscoelásticos, 2008, Dissertação (Mestrado em
Engenharia) - Programa de Pós-Graduação em Engenharia Mecânica e de Materiais, Universi-
dade Tecnológica Federal do Paraná, Curitiba, 128p.
RESUMO
Sistemas rotativos estão sujeitos à forças geradas pelo desbalanceamento residual a qual éproporcional ao quadrado da rotação. Não é incomum máquinas modernas de alta velocidadeoperarem acima da rotação crítica. Próximo a esta rotação, em sistemas com baixo amorteci-
mento, o fator de amplificação pode levar o rotor a operar em níveis de vibração excessiva oumesmo à destruição. Neutralizadores dinâmicos de vibração são dispositivos amplamente utili-zados na atenuação de ruído e vibração em estruturas não girantes. Normalmente neutralizado-res dinâmicos são construídos utilizando materiais viscoelásticos cujas propriedades dependemda temperatura e da freqüência. Um dos modelos que melhor descreve este comportamento éo que faz uso de derivada fracionária e quatro parâmetros. O sistema rotativo, chamado pri-mário, pode ser modelado utilizando parâmetros modais obtidos no domínio da freqüência doespaço de estado para uma dada temperatura de trabalho. Utilizando uma metodologia similarà desenvolvida pelo grupo PISA o sistema composto (sistema girante + neutralizadores) podeser modelado em um subespaço modal do sistema primário. O modelo à parâmetros equivalen-
tes generalizados utilizado nos neutralizadores permite que o sistema composto seja resolvidoutilizando as coordenadas generalizadas do sistema primário apenas, apesar dos mesmos intro-duzirem novos graus de liberdade. O projeto ótimo dos neutralizadores é implementado numsubespaço modal do espaço de estado do sistema primário utilizando um algoritmo de otimi-zação não linear. A função objetivo é definida pela norma Euclidiana do vetor de máximosabsolutos das assim chamadas coordenadas principais no subespaço definido. Os neutraliza-dores devem ser fixados ao sistema primário utilizando um mancal flutuante localizado em umponto modal ativo, cujo deslocamento é elevado para o modo a ser controlado. Uma metodo-logia de projeto ótimo de neutralizadores para redução da resposta vibratória flexional em umafaixa larga de freqüências é apresentada e resultados numéricos e experimentais são produzidose discutidos.
Palavras-chave: Máquinas Rotativas, Controle de Vibração, Neutralizadores Dinâmicos

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 7/147
vi
DOUBRAWA FILHO, Francisco José, Controle de Vibração Flexional em Sistemas Gi-
rantes Utilizando Neutralizadores Dinâmicos Viscoelásticos, 2008, Dissertação (Mestrado em
Engenharia) - Programa de Pós-Graduação em Engenharia Mecânica e de Materiais, Universi-
dade Tecnológica Federal do Paraná, Curitiba, 128p.
ABSTRACT
All rotating systems are subjected to residual unbalance forces proportional to speed squa-red. In modern high speed machines is usual operate above the first critical speed. Near to thisspeed in system with low damping, the amplification factor can lead the rotor to a high vibration
level condition or even to the destruction. Vibration neutralizers are well known devices andsuccessfully applied to reduce vibrations and noise on several dynamic non rotating structu-res. Usually the neutralizers are constructed using viscoelastic material which has frequency-temperature dependent properties. One of the models that best describes this behavior is thefour parameters fractional derivative. The rotating system here called primary system can bemodeled using modal parameters obtained in the frequency domain space state model for a gi-ven temperature. In a similar way to the general methodology developed by PISA group, thecompound system (rotating system + dynamic absorbers) can be modeled in a state space mo-dal subspace of the primary system. The dynamic absorbers itself modeled using generalizedequivalent parameters allows the compound system to be solved using only the generalized co-
ordinates of the primary system, even if they introduce new degrees of freedom. In this modalsubspace of the primary system the optimal design of the dynamic viscoelastic absorbers will beperformed using a non linear optimization algorithm. The cost function is defined by the Eucli-dean norm of the so called principal coordinates in the defined modal subspace. The absorbersshould be attached to a floating bearing located in a modal active point where the displacementis highest for the modes to be controlled. A methodology to optimal design of dynamic vibra-tion neutralizers to reduce a flexural unbalance response in a simple rotor, in a wide frequencyband, is presented and numerical-experimental results are produced and discussed.
Keywords: Rotating machinery, Vibration control, Dynamic neutralizers
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 8/147
vii
SUMÁRIO
RESUMO v
ABSTRACT vi
LISTA DE FIGURAS xii
LISTA DE TABELAS xvi
LISTA DOS PRINCIPAIS SÍMBOLOS xvii
LISTA DE ABREVIATURAS E SIGLAS xviii
1 INTRODUÇÃO 1
2 REVISÃO TEÓRICA 7
2.1 Equações de Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.1 Princípio do Trabalho Virtual . . . . . . . . . . . . . . . . . . . . . . 8
2.1.2 Massa e Rigidez Generalizadas para Sistemas Lineares . . . . . . . . . 9
2.2 Elementos do Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Disco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Eixo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.3 Mancais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.4 Excitação Tipo Desbalanceamento . . . . . . . . . . . . . . . . . . . . 20
2.2.5 Montagem das Matrizes Globais do Sistema . . . . . . . . . . . . . . . 22
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 9/147
Sumário viii
2.3 O Material Viscoelástico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3.1 Relação Constitutiva Generalizada . . . . . . . . . . . . . . . . . . . . 24
2.3.2 Efeito da Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.3 Efeito da Freqüência . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3.4 Outros Efeitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.5 Efeito Combinado de Temperatura e Freqüência . . . . . . . . . . . . . 28
2.4 Sistemas com Um Grau de Liberdade . . . . . . . . . . . . . . . . . . . . . . 29
2.4.1 Modelo Viscoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.4.2 Modelo Viscoelástico . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5 Controle de Vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5.1 Rigidez Dinâmica na Base . . . . . . . . . . . . . . . . . . . . . . . . 35
2.5.2 Sistemas com Dois Graus de Liberdade . . . . . . . . . . . . . . . . . 35
2.6 Parâmetros Equivalentes Generalizados . . . . . . . . . . . . . . . . . . . . . 39
2.7 Múltiplos Graus de Liberdade, Sistemas Girantes . . . . . . . . . . . . . . . . 42
2.7.1 Ortonormalização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.7.2 Diagrama de Campbell . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.7.3 Solução simplificada . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.7.4 Solução no Domínio da Freqüência . . . . . . . . . . . . . . . . . . . 49
3 MODELO DO SISTEMA COMPOSTO 533.1 Implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.2 Resposta em Freqüência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3 Inclusão dos Neutralizadores Diretamente no Modelo do Eixo . . . . . . . . . 56
3.3.1 Diagrama de Campbell . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4 PROJETO DO NEUTRALIZADOR PARA DESBALANCEAMENTO 624.1 Massa do Neutralizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 10/147
Sumário ix
4.2 Função Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
4.3 Implementação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.4 Detalhamento do processo de projeto . . . . . . . . . . . . . . . . . . . . . . . 65
4.5 Sistema Primário - Identificação . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.6 Sistema Auxiliar - Montagem . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.7 Simulação Numérica Sem Neutralizadores . . . . . . . . . . . . . . . . . . . . 72
4.8 Exportação das Matrizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.9 Parâmetros do Modelo de Derivada Fracionária do Material Viscoelástico . . . 73
4.10 Simulação Numérica Com Neutralizadores . . . . . . . . . . . . . . . . . . . . 74
4.11 Construção Física do Neutralizador . . . . . . . . . . . . . . . . . . . . . . . . 76
4.11.1 Outros Materiais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.11.2 Resposta em Freqüência . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.11.3 Variação dos Parâmetros do Material Viscoelástico com a Temperatura 81
5 VALIDAÇÃO EXPERIMENTAL 83
5.1 Resposta em Freqüência do Sistema em Repouso . . . . . . . . . . . . . . . . 83
5.2 Resposta ao Desbalanceamento . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.3 Tabela de Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4 Discussão dos Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4.1 Teste de Resposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4.2 Órbita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
6 CONCLUSÕES 91
7 SUGESTÕES PARA TRABALHOS FUTUROS 94
Referências Bibliográficas 95
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 11/147
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 12/147
Sumário xi
H.1 Obtenção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
ANEXO I -- EQUIPAMENTOS DE MEDIÇÃO 120I.1 Analisador de Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
I.2 Martelo Instrumentado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
I.3 Acelerômetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
I.4 Sistema de Aquisição de Sinal . . . . . . . . . . . . . . . . . . . . . . . . . . 122
I.5 Proximitor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
ANEXO J -- ROTORDIN 125
J.1 Introdução: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
J.2 Capacidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 13/147
xii
LISTA DE FIGURAS
Figura 1.1 Máquina de alta rotação, cortesia ASI Robicon. . . . . . . . . . . . . 1
Figura 2.1 Disco com velocidade Ω sobre AB. (fonte LALANNE e FERRARIS
(2001)) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figura 2.2 Modelo de viga discretizada. . . . . . . . . . . . . . . . . . . . . . . 16
Figura 2.3 Modelo para rigidez e amortecimento do mancal. . . . . . . . . . . . 19
Figura 2.4 Massa residual mu. . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figura 2.5 Condições de equilíbrio para 2 graus de liberdade por nó. . . . . . . 22
Figura 2.6 Montagem da matriz global, para 6 elementos 8×8. . . . . . . . . . 23
Figura 2.7 Variação com temperatura (freqüência constante). . . . . . . . . . . 26
Figura 2.8 Nomograma material Isodamp C-1002. . . . . . . . . . . . . . . . . 27
Figura 2.9 Sistema massa mola 1gl, modelo viscoso. . . . . . . . . . . . . . . . 30
Figura 2.10 Função resposta em freqüência adimensional. . . . . . . . . . . . . . 31
Figura 2.11 Rigidez dinâmica adimensional. . . . . . . . . . . . . . . . . . . . . 31
Figura 2.12 Sistema massa-elemento resilente 1gl. . . . . . . . . . . . . . . . . . 32
Figura 2.13 Função resposta em freqüência adimensional. . . . . . . . . . . . . . 33
Figura 2.14 Área de carregamento: a) axial, b) cisalhamento. . . . . . . . . . . . 34
Figura 2.15 Modelo viscoelástico no domínio da freqüência. . . . . . . . . . . . 35
Figura 2.16 Gráfico da rigidez dinâmica K b(Ω) na base. . . . . . . . . . . . . . . 36
Figura 2.17 Pontos fixos para vários amortecimentos. . . . . . . . . . . . . . . . 37
Figura 2.18 Desempenho dos modelos viscoelástico e viscoso. . . . . . . . . . . 38
Figura 2.19 Modelo com material viscoelástico no domínio da freqüência. . . . . 39
Figura 2.20 Equivalência de um sistema primário no domínio da freqüência. . . . 40
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 14/147
LISTA DE FIGURAS xiii
Figura 2.21 Sistema dois graus de liberdade no domínio da freqüência. . . . . . . 41
Figura 2.22 Diagrama de Campbell. . . . . . . . . . . . . . . . . . . . . . . . . 47
Figura 2.23 Resposta ao desbalanceamento, RotorDin. . . . . . . . . . . . . . . 52
Figura 2.24 Resposta ao desbalanceamento, LALANNE e FERRARIS (2001). . . 52
Figura 3.1 Diagrama de Campbell interno. . . . . . . . . . . . . . . . . . . . . 58
Figura 3.2 Detalhe do diagrama de Campbell interno. . . . . . . . . . . . . . . 59
Figura 3.3 Detalhe do diagrama de Campbell interno a 12500 (rpm). . . . . . . 59
Figura 3.4 Campbell final com neutralizadores. . . . . . . . . . . . . . . . . . . 60
Figura 3.5 Resposta com neutralizadores de neoprene e Ωrpm = 0. . . . . . . . . 61
Figura 3.6 Resposta com neutralizadores de borracha butílica. . . . . . . . . . . 61
Figura 4.1 Diagrama de otimização. . . . . . . . . . . . . . . . . . . . . . . . 65
Figura 4.2 Diagrama detalhado de otimização. . . . . . . . . . . . . . . . . . . 67
Figura 4.3 Bancada de teste do LAVIB. . . . . . . . . . . . . . . . . . . . . . . 68
Figura 4.4 Detalhe do dispositivo de segurança. . . . . . . . . . . . . . . . . . 70
Figura 4.5 Geometria do sistema primário do LAVIB. . . . . . . . . . . . . . . 71
Figura 4.6 Detalhe da fixação dos neutralizadores. . . . . . . . . . . . . . . . . 71
Figura 4.7 Diagrama de Campbell do sistema primário. . . . . . . . . . . . . . 72
Figura 4.8 Diagrama de Campbell do sistema primário (detalhe). . . . . . . . . 72
Figura 4.9 Resposta do sistema primário ao desbalanceamento. . . . . . . . . . 73
Figura 4.10 Nomograma do material viscoelástico. . . . . . . . . . . . . . . . . 74
Figura 4.11 Resposta ao desbalanceamento com e sem controle. . . . . . . . . . 75
Figura 4.12 Resposta linear com e sem controle. . . . . . . . . . . . . . . . . . . 75
Figura 4.13 Geometria do projeto físico do neutralizador de 150 (g). . . . . . . . 77
Figura 4.14 Modelo sólido do neutralizador. . . . . . . . . . . . . . . . . . . . . 77
Figura 4.15 Desempenho do neoprene. . . . . . . . . . . . . . . . . . . . . . . . 79
Figura 4.16 Desempenho da borracha butílica 20%. . . . . . . . . . . . . . . . . 79
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 15/147
LISTA DE FIGURAS xiv
Figura 4.17 desempenho da borracha natural. . . . . . . . . . . . . . . . . . . . 80
Figura 4.18 desempenho do material EAR isodamp C-1002. . . . . . . . . . . . 80
Figura 4.19 Resposta em freqüência com neutralizadores e Ωrpm = 0. . . . . . . 81
Figura 4.20 Resposta na temperatura de 318(K ). . . . . . . . . . . . . . . . . . 82
Figura 5.1 Medição da resposta em repouso. . . . . . . . . . . . . . . . . . . . 83
Figura 5.2 Esquema de medição FRF em repouso. . . . . . . . . . . . . . . . . 84
Figura 5.3 Resultado em repouso (inertância). . . . . . . . . . . . . . . . . . . 84
Figura 5.4 Resultado completo em repouso. . . . . . . . . . . . . . . . . . . . 85
Figura 5.5 Comparação de resultados em repouso. . . . . . . . . . . . . . . . . 85
Figura 5.6 Detalhe da fixação dos transdutores, em destaque eixo z. . . . . . . . 86
Figura 5.7 Órbita de referência a 1800 (rpm). . . . . . . . . . . . . . . . . . . . 87
Figura 5.8 Órbita sem neutralizadores na rotação crítica a 3600 (rpm). . . . . . 88
Figura 5.9 Órbita com neutralizadores na rotação crítica a 3600 (rpm). . . . . . 88
Figura A.1 Viga e modelo equivalente generalizado. . . . . . . . . . . . . . . . 101
Figura A.2 Acoplamento das coordenadas principais P(Ω). . . . . . . . . . . 103
Figura A.3 Otimização multi-modal. . . . . . . . . . . . . . . . . . . . . . . . . 107
Figura B.1 Comparação de técnicas de otimização. . . . . . . . . . . . . . . . . 111
Figura C.1 Deflexão devido compressão dos elementos. . . . . . . . . . . . . . 112
Figura D.1 Montagem para medição da massa aparente. . . . . . . . . . . . . . 113
Figura D.2 Gráfico massa aparente obtido para um neutralizador de 150 (g). . . . 114
Figura E.1 Transdutores em configuração ortogonal XY. . . . . . . . . . . . . . 115
Figura F.1 Movimento elíptico (órbita). . . . . . . . . . . . . . . . . . . . . . . 116
Figura G.1 Forma de vibrar do primeiro modo forward. . . . . . . . . . . . . . . 117
Figura H.1 Função resposta medida experimentalmente. . . . . . . . . . . . . . 119
Figura I.1 Analisador HP 3560A. . . . . . . . . . . . . . . . . . . . . . . . . . 120
Figura I.2 Martelo PCB 086C04. . . . . . . . . . . . . . . . . . . . . . . . . . 121
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 16/147
LISTA DE FIGURAS xv
Figura I.3 Acelerômetro PCB 352C68. . . . . . . . . . . . . . . . . . . . . . . 122
Figura I.4 Acelerômetro PCB 352C68. . . . . . . . . . . . . . . . . . . . . . . 122
Figura I.5 Placa de entrada SCXI 1531. . . . . . . . . . . . . . . . . . . . . . . 123
Figura I.6 Placa de aquisição DAQCArd 6062E. . . . . . . . . . . . . . . . . . 124
Figura I.7 Sensor PS 1002. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Figura I.8 Condicionador GS 501. . . . . . . . . . . . . . . . . . . . . . . . . 124
Figura J.1 Tela principal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
Figura J.2 Geometria e modelo. . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Figura J.3 Diagrama de Campbell. . . . . . . . . . . . . . . . . . . . . . . . . 127
Figura J.4 Resposta ao desbalanceamento. . . . . . . . . . . . . . . . . . . . . 128
Figura J.5 Modo 1, direção “forward”. . . . . . . . . . . . . . . . . . . . . . . 128
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 17/147
xvi
LISTA DE TABELAS
Tabela 2.1 Tabela de modelos equivalentes. . . . . . . . . . . . . . . . . . . . . 41
Tabela 4.1 Freqüências ótimas para diversos materiais. . . . . . . . . . . . . . . 78
Tabela 5.1 Resultados obtidos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 18/147
xvii
LISTA DOS PRINCIPAIS SÍMBOLOS
δ W - Trabalho virtual.
γ r - Deslocamento virtual.
F - Função dissipativa de Rayleigh.
ω - Velocidade angular.
Ω - Rotação em torno do eixo de coordenadas y, freqüência angular.
ψ , θ eφ - Ângulos de giro sobre Z , X eY , respectivamente.ρ - Massa específica.
σ - Tensão.
ε - Deformação.
ν - Coeficiente de Poisson.
α (T ) - Fator de deslocamento, dependente da temperatura.
β - Expoente fracionário característico do material viscoelástico.
η - Fator de perda material viscoelástico.
α (Ω) - Resposta em freqüência, receptância.
ε - Razão de freqüências.
β e - Fator de forma.
- Por definição.
ζ - Razão de amortecimento.
ℑ - Função transformada de Fourier.
[λ ] - Matriz de autovalores.
δ + iυ - Autovalor complexo.φ , ϕ - Vetores solução no domínio do tempo.
[θ ], [ψ ] - Matrizes de autovetores.
[Θ], [Ψ] - Matrizes de autovetores ortonormalizados.
R - Domínio dos números reais.
µ - Razão de massas.
δ m - Direção de descida.
δ c - Folga radial.
δ h - Compressão.
δ o - Ovalização.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 19/147
xviii
LISTA DE ABREVIATURAS E SIGLAS
BFGS - Algoritmo de otimização de Broyden - Fletcher - Goldfarb - Shanno.
CEFET-PR - Centro Federal de Educação Tecnológica do Paraná.
CNPq - Conselho Nacional de Desenvolvimento científico e tecnológico.
EPDM - Etileno-Propileno-Dieno (borracha).
FRF - Função Resposta em Freqüência.
UFPR - Universidade Federal do Paraná.
LAVIB - Laboratório de Vibrações, UTFPR.
LVA - Laboratório de Vibrações e Acústica - UFSC.
PISA - Grupo de Pesquisa Integrada em Sistemas Vibrantes e Acústicos.
RMS - “Root Mean Square”, valor médio quadrático.
TTL/CMOS - “Transistor-Transistor-Logic”/“Complementary Metal Oxide Semi-condutor”
UFSC- Universidade Federal de Santa Catarina.
UTFPR - Universidade Tecnológica Federal do Paraná.
WLF - Fator de deslocamento de Williams-Landel-Ferry.
CPU - “Central Processing Unit”, unidade central de processamento.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 20/147
1
1 INTRODUÇÃO
Máquinas de alta rotação tem um vasto campo de aplicação em compressores, bombas,
turbo-geradores, imposto por um mercado que exige potências maiores e tamanhos cada vez
menores. Como exemplo, a Figura 1.1, apresenta um motor de indução moderno de alta rotação
20.000 (rpm), potência 5 (MW). Vibrações em sistemas rotativos sempre estão presentes em
maior ou menor grau, devido à virtual impossibilidade de se atingir um balanceamento perfeitode suas partes rotativas. A energia gerada por uma massa desbalanceada residual em rotação
pode ser suficiente para excitar modos de flexão com pouco amortecimento e provocar respostas
significativas em seus elementos de restrição à translação (mancais).
Figura 1.1: Máquina de alta rotação, cortesia ASI Robicon.
Algumas abordagens para solucionar problemas relacionados com altos níveis de vibraçãopodem ser adotadas:
1. Agir sobre a excitação:
Diminuindo a excitação diminui-se a resposta. Em certas aplicações uma melhoria no
balanceamento exige a utilização de equipamentos de alta sensibilidade e mesmo assim,
imprecisões mecânicas e não linearidades do sistema estabelecem um limite prático para
a qualidade do balanceamento.
2. Modificação estrutural:
A intervenção estrutural pode ser utilizada de forma a alterar características do sistema
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 21/147
Capítulo 1 Introdução 2
como rigidez e amortecimento, e conseqüentemente, suas rotações características. Porém
em aplicações atuais, nem sempre é possível alterar suficientemente o sistema por força
de dimensões padronizadas e outros tipos de restrições mecânicas.
3. Operar o sistema longe de suas rotações características:
Sistemas modernos exigem uma capacidade de operação em múltiplas rotações e muitas
vezes acima de uma ou mais rotações críticas. Somente em aplicações específicas este
tipo de solução é viável, e mesmo assim, para atingir a rotação de regime é necessário
passar pela rotação crítica, o que sempre é uma tarefa difícil.
4. Controle de vibração:
(a) O isolamento de vibração permite reduzir a propagação e amplificação de vibra-
ção entre a máquina e o suporte, porém entre eixo e mancal ainda podem ocorrer
deslocamentos suficientes elevados para danificar selos e o próprio mancal.
(b) O uso de neutralizadores dinâmicos, uma outra forma de modificação estrutural,
permite reduzir a resposta em uma região da freqüência na qual o sistema possui
uma ou várias freqüências naturais. Estes dispositivos auxiliares podem ser classi-
ficados em dois grupos, ativos e passivos. Os dispositivos ativos requerem sensores
e processadores, apresentando por isso um custo adicional ou maior se comparadoaos passivos. Os dispositivos passivos, se devidamente projetados, deverão atenuar
a resposta vibratória, permitindo a operação precisa do sistema, com a desvanta-
gem de não se dispor da informação do resultado do controle em operação. Um
dos tipos de dispositivos que podem ser empregados, os neutralizadores dinâmicos,
são o objeto de estudo desta proposta. Para estruturas não girantes ESPÍNDOLA e
SILVA (1992) desenvolveu uma teoria geral para projetar de forma ótima este tipo
de dispositivo, utilizando materiais viscoelásticos como elemento resilente.
O projeto de neutralizadores dinâmicos para sistemas não girantes vem evoluindo na sua im-
plementação e projeto. Segundo KRENEV e REZNIKOV (1993), para reduzir o movimento
oscilatório em navios, o almirante Makarov em 1897 desenvolveu o conceito de neutralizador
de vibrações utilizando a transferência de água entre tanques, mas foi FRAHM (1909), que de-
finitivamente teve seu nome associado ao desenvolvimento deste tipo de neutralizador. Outro
pioneiro, HARTOG (1956), estudou modelos simples de um grau de liberdade massa-mola-
amortecedor viscoso e propôs o método dos pontos fixos, visando a obtenção de parâmetrosótimos através da sintonização do neutralizador.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 22/147
Capítulo 1 Introdução 3
Inicialmente os neutralizadores eram projetados sem amortecimento, tinham uma faixa de
operação muito estreita e não raro apresentavam problemas de fadiga. Por outro lado, o amor-
tecimento viscoso, modelo utilizado como elemento dissipador de energia vibratória, era de
difícil implementação prática.
Modelos de neutralizadores utilizando material viscoelástico foram apresentados por SNOW-
DON (1959), aplicados a sistemas de um e dois graus de liberdade, onde o material viscoelástico
substitui a mola e o amortecedor viscoso. A grande vantagem deste tipo de material é o elevado
amortecimento que pode ser obtido e a versatilidade para projetar neutralizadores dinâmicos de
tamanhos variados. Existem varias abordagens para o modelamento do comportamento deste
tipo de material, dentre as quais não se pode deixar de citar os modelos simples propostos
por Kelvin e Maxwell LAKES (1999). Estes modelos não conseguem descrever o comporta-mento do material numa escala larga de freqüência. Modelos mais precisos, como estudado por
ROGERS (1983), utilizando derivadas fracionárias descrevem com a aproximação necessária
à aplicações em banda larga, as variações do módulo de elasticidade e o fator de perda com
a freqüência e temperatura. PRITZ (1996) estudou o modelo utilizando derivada fracionária
com quatro parâmetros. Materiais viscoelásticos são amplamente utilizados na engenharia em
controle de vibrações e ruído irradiado. Para tal fim, o conhecimento preciso das características
dinâmicas deste material é fundamental. LOPES et al. (2004) desenvolve e utiliza uma meto-
dologia própria para a determinação das características do módulo de cisalhamento G e fator de
perda η , em função da freqüência e da temperatura, apresentando-as em forma de nomograma
conforme LOPES et al. (2004) e ESPÍNDOLA et al. (2006). Aplicações bem sucedidas deste
modelo, utilizado em neutralizadores dinâmicos para controle de vibração, podem ser encon-
trados nos trabalhos de ESPíNDOLA et al. (2005), CRUZ (2004), BAVASTRI et al. (2006) e
FERREIRA (2005) entre outros.
Um dos problemas decorrentes da utilização do material viscoelástico em neutralizadores
dinâmicos é a grande variação de seus parâmetros de rigidez e amortecimento com a freqüência
de operação e a temperatura, o que praticamente inviabiliza métodos analíticos de otimização
de parâmetros, tendo em vista a complexidade inerente à própria formulação. Visando resolver
este problema, as técnicas de otimização não linear tem sido aplicadas com sucesso na obten-
ção de parâmetros ótimos para neutralizadores, como realizado por KITIS (1983) ao minimizar
a resposta vibratória de uma viga engastada simples utilizando neutralizadores dinâmicos. O
método que foi empregado naquele trabalho resolve o sistema completo (no espaço de configu-
rações), cujo problema pode se tornar extremamente pesado, do ponto de vista computacional,quando o sistema apresenta um número de graus de liberdade elevado, situação comum em
sistemas rotativos modelados com elementos de viga.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 23/147
Capítulo 1 Introdução 4
Para este tipo de problema, ESPÍNDOLA (1992) e SILVA (1991) apresentaram uma ge-
neralização para o projeto ótimo de neutralizadores dinâmicos, propondo o conceito de parâ-
metros equivalentes generalizados no qual a dinâmica do sistema composto (sistema primário
com neutralizadores dinâmicos) pode ser descrito apenas em função das coordenadas generali-
zadas do sistema primário, sendo possível então realizar as análises em um sub-espaço modal
do sistema primário, com um número reduzido de equações. O sistema composto foi suposto
como completamente desacoplado, e o controle foi realizado modo a modo, onde um ou mais
neutralizadores eram projetados para controlar um modo especificado.
O truncamento das matrizes modais, como proposto por ESPÍNDOLA e SILVA (1992) e
apresentado em BAVASTRI (1997), permite sem perda de precisão na faixa de freqüência pro-
posta, uma redução no tamanho do sistema e conseqüente ganho de performance na solução.Quando se propõe o controle de vários modos simultaneamente, utilizando um ou mais neutra-
lizadores, é essencial que se estabeleça a função objetivo a qual é submetida a um algoritmo
de otimização determinístico, evolucionário ou combinação de ambos. Em função do tipo de
problema, que pode apresentar mínimos locais, a combinação de métodos se mostra bastante
eficiente. Enquanto o algoritmo evolucionário busca uma aproximação para o mínimo global,
o determinístico se encarrega de garantir a localização exata do ponto de mínimo da função
objetivo.
É possível aplicar os conceitos de controle passivo ótimo de vibração flexional em sistemas
girantes. Para tal fim, é necessário adaptar a teoria de estruturas não girantes, já que em geral
é necessário modelar o sistema composto em um sub-espaço modal do espaço de estado do
sistema primário.
O estudo de sistemas girantes, partiu de modelos muito simples, como o trabalho publi-
cado por RANKINE (1869) no qual eram previstas precessão e deflexão sem limites. Conforme
GENTA (2005), De Laval
1
, posteriormente em 1889, construiu com sucesso máquinas centrífu-gas e turbinas que operavam acima da primeira rotação crítica. DUNKERLEY (1894) publicou
um estudo sobre vibrações em eixos e utilizou pela primeira vez o termo “rotação crítica”.
Outro pioneiro JEFFCOTT (1919), modelou um rotor de forma simples mas consistente até a
rotação crítica. Grandes avanços foram obtidos por STODOLA (1927) na teoria da operação
super-crítica (acima da rotação crítica). SMITH (1933) publicou um artigo sobre estabilidade
introduzida pelo amortecimento. Posteriormente, MYKLESTAD (1944), PROHL (1945) e ou-
tros desenvolveram o método de cálculo da rotação crítica através de matrizes de transferência,
1Carl Gustaf Patrik de Laval (Orsa, Dalarna, 9 de Maio de 1845 - Estocolmo, 2 de Fevereiro de 1913) foium engenheiro e inventor sueco, que fez grandes contribuições no projeto da turbina a vapor e na maquinaria deordenha do leite.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 24/147
Capítulo 1 Introdução 5
que ainda encontra aplicação atualmente.
O modelo numérico para sistemas rotativos está muito bem desenvolvido, podendo-se citar
vários autores como LALANNE e FERRARIS (2001), GENTA (2005) e VANCE (1988), entreoutros. Estes autores descrevem um sistema girante através de equações diferenciais gerais do
movimento, utilizando matrizes consistentes de massa, rigidez e amortecimento considerando o
efeito giroscópico. Estas matrizes, por sua vez, podem ser obtidas através de modelos discretos
finitos, em geral para elementos finitos de viga, disco e mancais, como proposto por LALANNE
e FERRARIS (2001) e que possibilita simulações com resultados precisos.
A atenuação de vibrações em sistemas girantes pode ser ativa, tipo balanceamento, como
publicado por ALAUZE et al. (2001) e ZHOU e SHI (2001), onde um sistema composto por
sensores e uma “CPU”, adquire sinais de velocidade, fase e amplitude de vibração e calcula
em tempo real, o deslocamento de massas distribuídas em diferentes raios através de servo-
mecanismos. Mancais de levitação magnética, também tem se mostrado outro método ativo
de redução de vibrações, como apresentado por HOPE et al. (1998). Porém, devido ao alto
custo da implementação, sua utilização ainda é bastante restrita. Outro tipo de controle ativo
adaptativo foi apresentado por TAMMI (2007), utilizando atuador e software. Neste caso o
atuador é composto pelas bobinas eletromagnéticas que compõem o mancal.
Outro tipo de abordagem, o controle passivo de vibrações, se faz, por exemplo, introduzindo
amortecimento nos mancais do sistema, através de mantas de material viscoelástico, como pro-
posto em FERREIRA (2005) e em CHÁVEZ (2003), ou ainda, introduzindo um fino filme de
óleo na capa externa dos rolamentos que compõem os mancais do sistema (“squeeze-film”),
como mostrado por ZEIDAN (1995). Nesses casos a resposta vibratória também é atenuada,
mas a aplicação requer a modificação do projeto dos mancais.
Com a evolução das técnicas de projeto do eixo de máquinas rotativas, é possível predi-
zer suas rotações críticas com precisão. Em diversas situações, pode ser necessário operar amáquina em rotações acima da primeira e até mesmo da segunda ou terceira rotações críticas,
como no caso de turbo-geradores, ou através de inversores de freqüência. Isto significa que em
um dado instante, o eixo poderá estar sujeito a uma amplificação da vibração, provocada pela
coincidência da rotação com sua freqüência característica de flexão. Esta rotação é comumente
denominada de rotação crítica. Dependendo da situação, se a passagem pela rotação crítica não
for rápida o suficiente ou se o amortecimento no mancal não for elevado , o nível de vibração
resultante pode ocasionar danos permanentes em mancais e selos mecânicos, com a necessidade
de parada e reparo da máquina. Em geral, máquinas com mancal de rolamento, devido ao baixo
amortecimento inerente, são sempre projetadas para operar abaixo da primeira rotação crítica.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 25/147
Capítulo 1 Introdução 6
Neste trabalho, desenvolve-se um projeto ótimo de neutralizadores dinâmicos, utilizando
material viscoelástico como elemento resilente. Os mesmos são acoplados ao eixo do rotor da
máquina através de um falso mancal (mancal flutuante), possibilitando a operação ou a transição
suave ao passar por uma ou mais rotações críticas. Desta forma, pretende-se minimizar a am-
plificação da resposta vibratória à flexão ampliando a faixa de trabalho da máquina e garantindo
a durabilidade dos elementos que compõem o rotor.
Para que se possa projetar tal neutralizador é necessário obter o modelo modal do sistema
girante para o qual é utilizado um código numérico próprio. A partir destes parâmetros e utili-
zando uma teoria equivalente à apresentada por BAVASTRI (1997), propõe-se uma metodolo-
gia geral (aplicável em sistemas girantes modeláveis através de tais parâmetros) para o projeto
ótimo de neutralizador dinâmico de vibração viscoelástico para sistemas rotativos, controlandouma ou várias rotações críticas. Obtidos os parâmetros modais do sistema primário, o sistema
composto (sistema primário + neutralizadores dinâmicos) é modelado em um sub-espaço mo-
dal no espaço de estado do sistema primário. Utilizando técnicas de otimização não linear, são
variadas as freqüências naturais dos neutralizadores, buscando a minimização da resposta do
sistema composto, dentro da faixa de freqüências proposta.
Para validação do procedimento, são construídos e ensaiados, neutralizadores dinâmicos
viscoelásticos a serem montados em um mancal flutuante, sobre um rotor simples. O materialviscoelástico a ser utilizando deve ter suas características dinâmicas perfeitamente conhecidas.
O modelo matemático proposto, para predizer o comportamento dinâmico do sistema com-
posto (primário + neutralizadores), foi implementado em uma linguagem de alto nível. Os
resultados numéricos obtidos são apresentados, comparados com as medições experimentais
realizadas e discutidos. São também apresentadas as conclusões e sugestões para trabalhos
futuros.
No corrente projeto, o sistema girante se limitará a eixos e discos cilíndricos e simétricos,modelados através de expressões para energia cinética e potencial, aplicadas à equação de La-
grange. As forças consideradas são devido ao desbalanceamento e os mancais do tipo rolamento
de alta rigidez, são considerados pouco amortecidos por hipótese. Os elementos do sistema são
discretizado através do método de elementos finitos. Através de matrizes elementares obtidas
da formulação de Lagrange, são montadas as matrizes globais de massa, rigidez, amortecimento
e giroscópica. Estas matrizes globais são aplicadas à equação geral do movimento que, quando
solucionada através de um conjunto de problemas de autovalor, permite obter os parâmetros
modais do sistema girante primário. A obtenção dos parâmetros, como descrita, está imple-
mentada em um código numérico próprio denominado “RotorDin” (ver J.1).
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 26/147
7
2 REVISÃO TEÓRICA
Neste capítulo são revisados os modelos matemáticos necessários para o claro entendimento
do propósito e dos meios utilizados no desenvolvimento deste trabalho, com ênfase em sistemas
girantes e neutralizadores dinâmicos.
Os principais tópicos revisados são:
• Obtenção dos elementos da equação do movimento para sistemas rotativos modelados
através do método dos elementos finitos utilizando as equações de Lagrange.
• Um modelo para o comportamento do material viscoelástico em função da freqüência e
da temperatura utilizando derivada fracionária.
• Os modelos de um e dois graus de liberdade para um sistema simples massa-mola-
amortecedor e massa-material resilente, bem como os princípios básicos de controle de
vibração.
• A teoria geral de parâmetros equivalentes generalizados.
• O modelo de múltiplos graus de liberdade do sistema girante, o problema de autovalores
e sua solução. O diagrama de Campbell e a resposta ao desbalanceamento.
2.1 Equações de Lagrange
Através de um equacionamento baseado em grandezas escalares (trabalho e energia), La-
grange desenvolveu uma teoria para descrever o movimento de sistemas dinâmicos. Para des-
crever completamente o movimento de um sistema, são necessárias tantas coordenadas inde-
pendentes quanto os graus de liberdade considerados.
A um conjunto de coordenadas físicas pode ser imposta uma ou mais transformações linea-
res de maneira a representar as mesmas para um sistema referencial arbitrário. Tais coordenadas
são denominadas “generalizadas”.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 27/147
Capítulo 2 Revisão Teórica 8
2.1.1 Princípio do Trabalho Virtual
Para um sistema de N partículas qualquer em equilíbrio, podem ser impostos deslocamen-
tos virtuais infinitesimais δ r j, fisicamente realizáveis, de tal modo que o trabalho virtual δ W
realizado pelas forças F j responsáveis pelos deslocamentos seja nulo. Ou seja
δ W = N
∑ j
F jδ r j = 0 Eq. 2.1
Trabalho Virtual em Coordenadas Generalizadas
Para um sistema qualquer com n graus de liberdade, é possível expressar um deslocamentor em função de n coordenadas generalizadas q, como mostrado por MEIROVITCH (1990),
como
r j = r j(q1, q2,...,qn) j = 1, N . Eq. 2.2
Um deslocamento virtual δ r j pode ser obtido da expressão
δ r j =n
∑i=1
∂ r j∂ qi
δ qi. Eq. 2.3
O trabalho virtual δ W realizado, associado à força F j, através da força generalizada
Qi =n
∑ j=1
F j∂ r j∂ qi
, Eq. 2.4
pode ser expresso através da relação
δ W =n
∑i=1
Qiδ qi. Eq. 2.5
Este conceito foi estendido por D’Alembert para sistemas dinâmicos, a partir da segunda lei de
Newton, aplicada à i-ésima partícula de massa mi, com f i representando forças internas ou de
restrição
F i − f i = mir . Eq. 2.6
Aplicando o princípio do trabalho virtual em um sistema de n coordenadas generalizadas, a
energia cinética T de um sistema de partículas é dada pela expressão
T = N
∑i
12
mir 2i , Eq. 2.7

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 28/147
Capítulo 2 Revisão Teórica 9
obtém-se
δ W T =n
∑k =1
d dt
∂ T ∂ qk
− ∂ T ∂ qk
−Qk
δ qk . Eq. 2.8
Em um sistema conservativo, o trabalho realizado só depende dos estados inicial e final de suaenergia potencial U . Não há dissipação no caminho. Em termos de coordenadas generalizadas
(arbitrando-se o estado inicial como energia potencial nula), tem-se
W = −U (q1, q2,...,qn). Eq. 2.9
Portanto, o trabalho virtual em termos de energia potencial, é dado pela expressão
δ W U =
−∑
k
∂ U ∂ q
k
δ qk . Eq. 2.10
Forças não conservativas f i também efetuam trabalho. Definindo-as em termos de coordenadas
generalizadas tem-se
Qk =n
∑i=1
f i∂ r i∂ qk
, Eq. 2.11
logo
δ W Q =∑k
Qk δ qk . Eq. 2.12
A equação de Lagrange completa ficad dt
∂ T ∂ qk
− ∂ T ∂ qk
+∂ U ∂ qk
= Qk , Eq. 2.13
ou na sua forma reduzida, com o Lagrangeano definido como L = T −U e ∂ U ∂ q = 0
d dt
∂ L∂ qk
− ∂ L∂ qk
= Qk . Eq. 2.14
2.1.2 Massa e Rigidez Generalizadas para Sistemas LinearesQuando o deslocamento das coordenadas generalizadas fica restrito à vizinhança do seu
ponto de equilíbrio as equações do movimento da estrutura podem ser consideradas lineares,
como mostrado em ESPÍNDOLA (1992).
Energia Potencial
A equação da energia potencial U (Equação 2.10) para um sistema de n graus de liberdadeem função de suas coordenadas generalizadas, pode ser representada em torno de um ponto de
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 29/147
Capítulo 2 Revisão Teórica 10
equilíbrio através da série de Taylor
U = U 0 +n
∑ j=1
∂ U ∂ q j
0
q j +12
n
∑ j=1
n
∑l=1
∂ 2U
∂ q j∂ ql
0
q jql + · · · Eq. 2.15
As derivadas são calculadas na posição de equilíbrio, por conveniência denominado ponto “0”
(zero). Considerando que a posição de equilíbrio corresponde à mínima energia potencial do
sistema, sua derivada primeira pode ser considerada nula. O termo constante U 0 também pode
ser considerado nulo no ponto de referência. Desprezando os termos superiores da série de
Taylor, a expressão da energia potencial é
U =12
n
∑ j=1
n
∑l=1
∂ 2U
∂ q j∂ ql
0
q jql. Eq. 2.16
Através da comparação da expressão acima com a da energia associada a um sistema massa-
mola de um grau de liberdade U = 12kx2, a rigidez generalizada k jl fica definida
k jl
∂ 2U
∂ q j∂ ql
0
. Eq. 2.17
Assim, pode-se escrever genericamente a energia potencial elástica do sistema através da equa-
ção
U =12qT [K ]q. Eq. 2.18
Energia Cinética
Em um sistema de n graus de liberdade, em função de suas coordenadas generalizadas q, a
derivada temporal da posição r , da i-ésima partícula é
r i =n
∑ j=1
∂ r i∂ q j
q j +∂ r i∂ t
. Eq. 2.19
A expressão geral para a energia cinética é
T =12
N
∑i=1
mir 2i . Eq. 2.20
Para um sistema de N partículas em termos de coordenadas generalizadas é dada pela relação
T =12
N
∑i=1
mi
n
∑ j=1
n
∑l=1
∂ r i∂ q j
∂ r i∂ ql
q jql + 2∂ r i∂ t
n
∑ j=1
∂ r i∂ q j
q j +∂ r i∂ t
∂ r i∂ t
, Eq. 2.21
ou, separando em três parcelas
T = T 2 + T 1 + T 0. Eq. 2.22

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 30/147
Capítulo 2 Revisão Teórica 11
Reescrevendo a expressão geral (Equação 2.22) para um sistema cujas restrições são indepen-
dentes do tempo. Neste caso então T 1 = 0 e T 0 = 0 e tem-se
T = T 2 = 12
n
∑ j=1
n
∑l=1
q jql N
∑i=1
mi ∂ r i∂ q j
∂ r i∂ ql
. Eq. 2.23
Assim a massa generalizada m jl pode então ser definida como
m jl = N
∑i=1
mi∂ r i∂ q j
∂ r i∂ ql
=∂ 2T 2∂ q j∂ ql
, Eq. 2.24
e a energia cinética em forma matricial é
T =
1
2qT
[ M ]q. Eq. 2.25
O segundo termo (T 1) da Equação 2.21, introduz o efeito giroscópico. Definindo a força
f r = N
∑i=1
mi∂ r i∂ t
∂ r i∂ qr
, Eq. 2.26
e desenvolvendo sua derivada temporal em série de Taylor no ponto de equilíbrio, obtém-se
f r = f r (0) +n
∑l=1
∂ f r
∂ qlql +
12
n
∑i=1
n
∑l=1
∂ f r
∂ qi∂ qlqiql + ..., Eq. 2.27
aproximando para o primeiro termo
f r n
∑l=1
∂ f r
∂ qlql Eq. 2.28
definindo-se
f rl =∂ f r
∂ ql, Eq. 2.29
obtém-se
f r =
n
∑l=1
f rlql. Eq. 2.30
Desta forma, a parcela componente T 1 da energia cinética é
T 1 =n
∑ j=1
f r q j, Eq. 2.31
ou em forma matricial
T 1 = qT [F ]q. Eq. 2.32

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 31/147
Capítulo 2 Revisão Teórica 12
Da expressão matricial, pode-se deduzir que
f jl =∂ 2T 1∂ q
l∂ q j
e f l j =∂ 2T 1∂ q j∂ q
l
.
O terceiro termo, T 0, componente da Equação 2.21, segundo ESPÍNDOLA (1992), refere-se a
uma alteração na rigidez devido ao efeito de campos longitudinais (força centrífuga) e não de-
pende da velocidade generalizada, mas somente da coordenada generalizada, pode ser reescrito
como
T 0 =12
N
∑i=1
mi∂ r i∂ t
∂ r i∂ t
. Eq. 2.33
Forças Dissipativas
A função dissipativa de Rayleigh modela o trabalho realizado por forças devido ao amor-
tecimento viscoso, coeficientes ci j e circulatórias (1), hi j, proporcionais à velocidade generali-
zada, como apresentado por MEIROVITCH (1990)
F =12
n
∑i=1
n
∑ j=1
ci jqiq j +n
∑i=1
n
∑ j=1
hi jqiq j. Eq. 2.34
Equação de Lagrange na Forma Final
Para um sistema qualquer no qual atua uma força generalizada F na k-ésima coordenada
generalizada, incorporando-se todos os termos desenvolvidos e utilizando a definição do La-
grangeano L = T −U , obtém-se
d dt
∂ L∂ qk
− ∂ L∂ qk
+∂ F
∂ qk = F k . Eq. 2.35
Substituindo os termos obtidos para a energia cinética T , a energia potencial U e de dissipaçãoF na 2.35, obtém-se o conjunto de equações que descrevem o movimento de um sistema linear
com n graus de liberdade
n
∑ j=1
mi jq j + (ci j + gi j)q j + (k i j + hi j)q j
= F i i = 1, 2, . . . , n, Eq. 2.36
onde gi j f i j − f ji, ou na forma matricial
[ M ]
q
+ ([C ] + [G])
q
+ ([K ] + [ H ])
q
=
F
, Eq. 2.37
1A matriz de circulação H está relacionada ao efeito da circulação de fluxo, como o que ocorre em um perfilde asa aeronáutico, por exemplo.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 32/147
Capítulo 2 Revisão Teórica 13
onde
•[ M ] - Matriz de inércia (simétrica).
• [C ] - Matriz de amortecimento viscoso (simétrica).
• [G] - Matriz giroscópica (anti-simétrica).
• [K ] - Matriz de rigidez (simétrica).
• [ H ] - Matriz de circulação (anti-simétrica).
• F
- Vetor de excitação (forças generalizadas).
• q - Vetor de coordenadas generalizadas.
• q = d dt q - Vetor de velocidades generalizadas.
• q = d 2
dt 2q- Vetor de acelerações generalizadas.
2.2 Elementos do Rotor
2.2.1 Disco
O disco é caracterizado como um segmento de cilindro rígido, de massa M d , cuja energia
cinética pode ser expressa através da relação
T d =12
M d r 2 + I ω 2
, Eq. 2.38
onde r representa a velocidade de translação do sistema de referência, móvel em relação ao sis-
tema inercial, ω a velocidade angular e I a inércia, referentes ao centro de massa C . Considera-se a rotação Ω livre em torno do eixo de coordenadas y e nulo o deslocamento nesta direção.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 33/147
Capítulo 2 Revisão Teórica 14
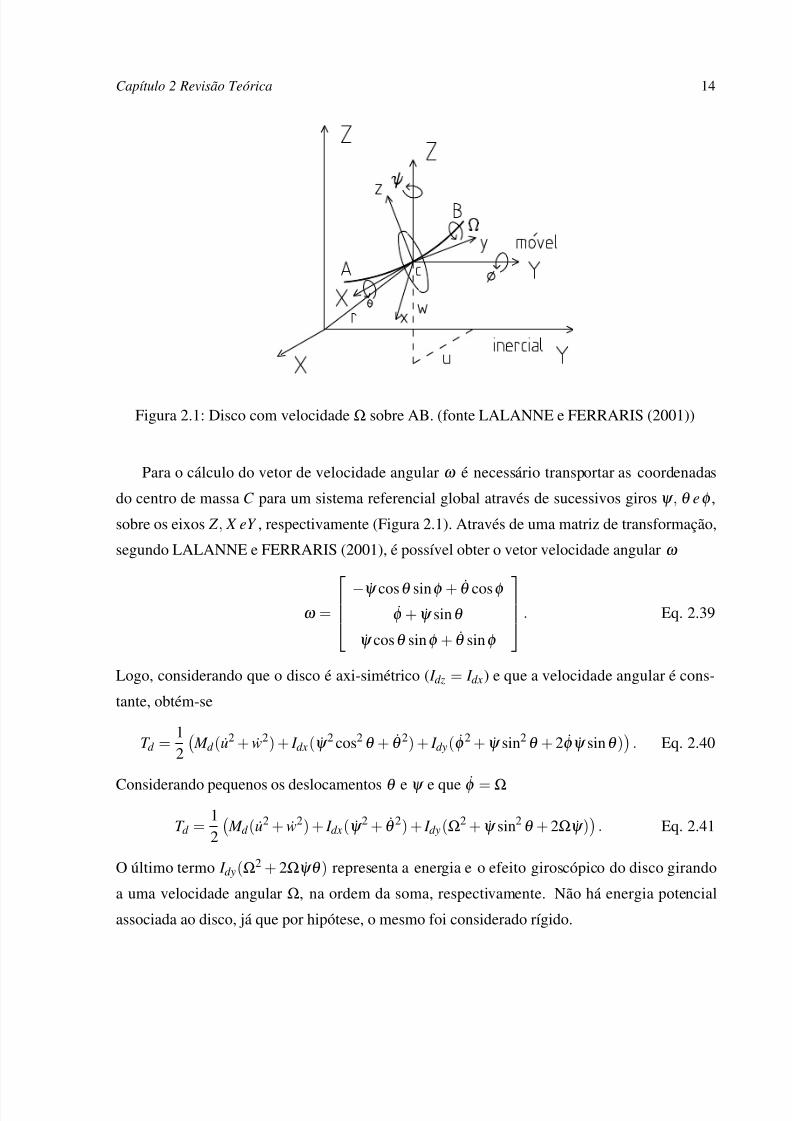
Figura 2.1: Disco com velocidade Ω sobre AB. (fonte LALANNE e FERRARIS (2001))
Para o cálculo do vetor de velocidade angular ω é necessário transportar as coordenadas
do centro de massa C para um sistema referencial global através de sucessivos giros ψ , θ eφ ,
sobre os eixos Z , X eY , respectivamente (Figura 2.1). Através de uma matriz de transformação,
segundo LALANNE e FERRARIS (2001), é possível obter o vetor velocidade angular ω
ω =
−ψ cosθ sinφ + θ cosφ φ + ψ sinθ
ψ cosθ sinφ + θ sinφ
. Eq. 2.39
Logo, considerando que o disco é axi-simétrico ( I dz = I dx) e que a velocidade angular é cons-
tante, obtém-se
T d =12
M d (u2 + w2) + I dx(ψ 2 cos2θ + θ 2) + I dy(φ 2 + ψ sin2θ + 2φ ψ sinθ )
. Eq. 2.40
Considerando pequenos os deslocamentos θ e ψ e que φ =Ω
T d =12
M d (u2 + w2) + I dx(ψ 2 + θ 2) + I dy(Ω2 + ψ sin2θ + 2Ωψ )
. Eq. 2.41
O último termo I dy(Ω2 + 2Ωψθ ) representa a energia e o efeito giroscópico do disco girando
a uma velocidade angular Ω, na ordem da soma, respectivamente. Não há energia potencial
associada ao disco, já que por hipótese, o mesmo foi considerado rígido.

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 34/147
Capítulo 2 Revisão Teórica 15
Formulação por Elementos Finitos
Para descrever o deslocamento do centro de um disco rígido é necessário somente um “nó”
e quatro graus de liberdade, dois de translação uew e dois para rotação θ eψ , sendo sua coor-
denada generalizada q representada por
q = [u, w,θ ,ψ ]T . Eq. 2.42
Aplicando a equação de Lagrange (Equação 2.13) na Equação 2.40, obtém-se segundo LA-
LANNE e FERRARIS (2001), as matrizes de contribuição de massa e giroscópica abaixo:
[ M d ] =
M d 0 0 0
0 M d 0 0
0 0 I dx 0
0 0 0 I dx
e [Gd ] = Ω
0 0 0 0
0 0 0 0
0 0 0 − I dy
0 0 I dy 0
Eq. 2.43
2.2.2 Eixo
Para um elemento de eixo com seção circular S e momento de inércia de área I , constantes
em um segmento finito de comprimento L e massa específica ρ , a energia cinética T e
pode
ser obtida por extensão da equação do disco (Equação 2.40) através da integração ao longo do
comprimento L como
T e =ρS2
L
0(u2 + w2)dy +
ρ I 2
L
0(ψ 2 + θ 2)dy +ρ ILΩ2 + 2ρ I Ω
L
0ψθ dy. Eq. 2.44
Considerando que o momento de inércia de área I da seção S pode ser obtido da expressão
I x =
S x2dS e I z =
S z2dS, Eq. 2.45
e que o eixo é axi-simétrico e não esta submetido a carga axial, LALANNE e FERRARIS (2001)
demonstra que a energia potencial U e integrada sobre a seção S ao longo do comprimento do
eixo L é dada por
U e =EI 2
L
0
∂ 2u∂ y2
2
+
∂ 2w∂ y2
2
dy. Eq. 2.46
Formulação por Elementos Finitos
O eixo é dividido em n segmentos de comprimento ∆ y de seção constante. Cada nó da
seção elementar tem quatro graus de liberdade. Para pequenos deslocamentos u e w podem-se
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 35/147
Capítulo 2 Revisão Teórica 16
estabelecer relações entre deslocamentos lineares e angulares conforme
θ =∂ w∂ y
e ψ = −∂ u∂ y
. Eq. 2.47
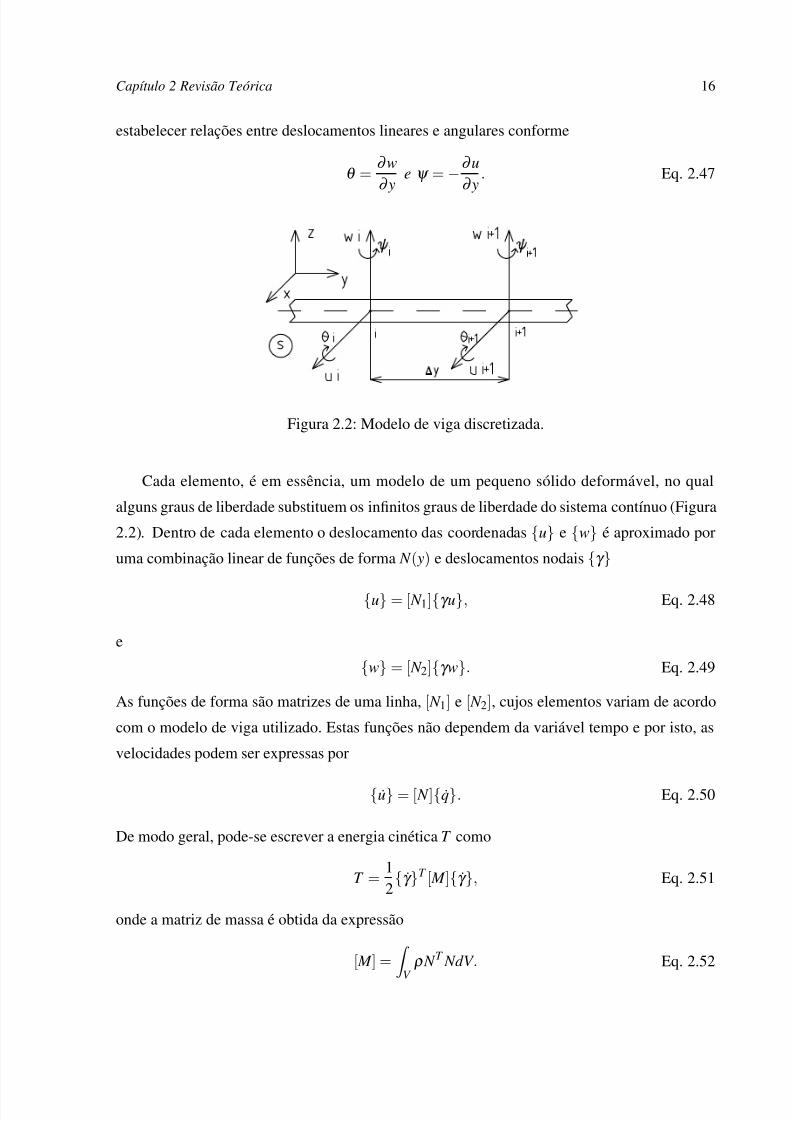
Figura 2.2: Modelo de viga discretizada.
Cada elemento, é em essência, um modelo de um pequeno sólido deformável, no qual
alguns graus de liberdade substituem os infinitos graus de liberdade do sistema contínuo (Figura
2.2). Dentro de cada elemento o deslocamento das coordenadas u e w é aproximado por
uma combinação linear de funções de forma N ( y) e deslocamentos nodais γ
u = [ N 1]γ u, Eq. 2.48
e
w = [ N 2]γ w. Eq. 2.49
As funções de forma são matrizes de uma linha, [ N 1] e [ N 2], cujos elementos variam de acordo
com o modelo de viga utilizado. Estas funções não dependem da variável tempo e por isto, as
velocidades podem ser expressas por
u = [ N ]q. Eq. 2.50
De modo geral, pode-se escrever a energia cinética T como
T =12γ T [ M ]γ , Eq. 2.51
onde a matriz de massa é obtida da expressão
[ M ] = V ρ N T NdV . Eq. 2.52
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 36/147
Capítulo 2 Revisão Teórica 17
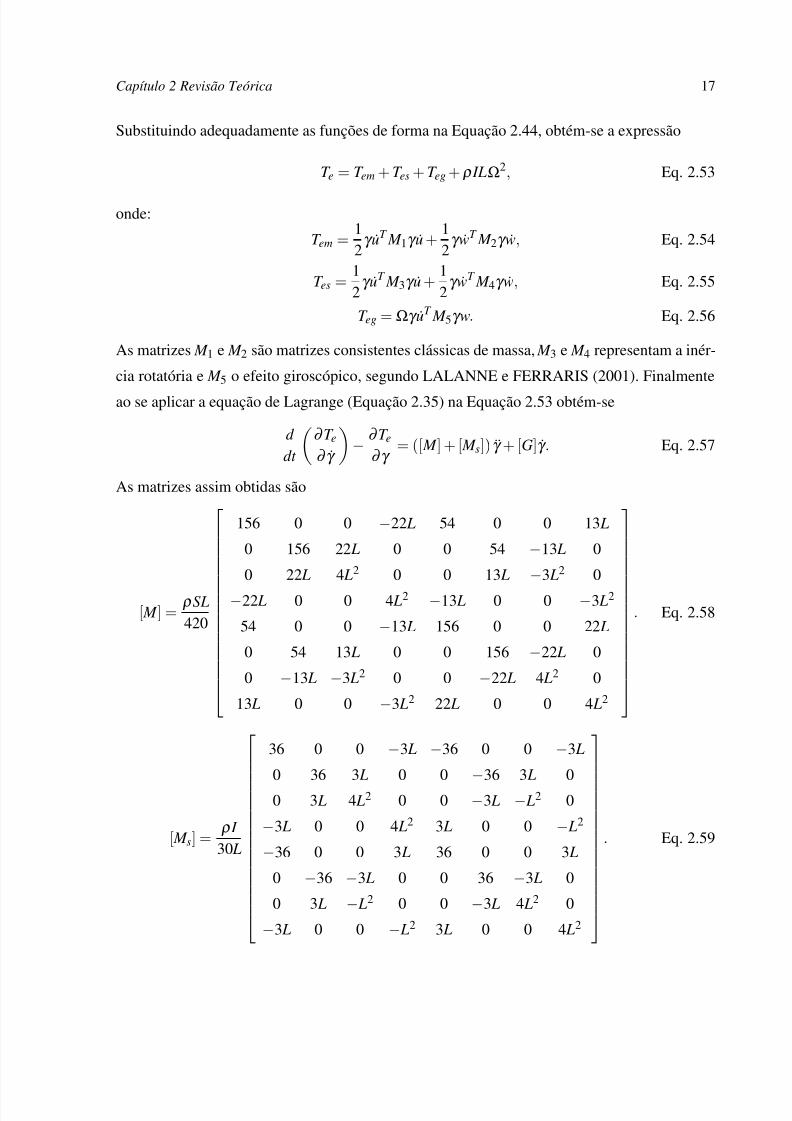
Substituindo adequadamente as funções de forma na Equação 2.44, obtém-se a expressão
T e = T em + T es + T eg +ρ ILΩ2, Eq. 2.53
onde:
T em =12γ uT M 1γ u +
12γ wT M 2γ w, Eq. 2.54
T es =12γ uT M 3γ u +
12γ wT M 4γ w, Eq. 2.55
T eg =Ωγ uT M 5γ w. Eq. 2.56
As matrizes M 1 e M 2 são matrizes consistentes clássicas de massa, M 3 e M 4 representam a inér-
cia rotatória e M 5 o efeito giroscópico, segundo LALANNE e FERRARIS (2001). Finalmente
ao se aplicar a equação de Lagrange (Equação 2.35) na Equação 2.53 obtém-se
d dt
∂ T e∂ γ
− ∂ T e
∂γ = ([ M ] + [ M s]) γ + [G]γ . Eq. 2.57
As matrizes assim obtidas são
[ M ] =ρSL420
156 0 0 −22 L 54 0 0 13 L
0 156 22 L 0 0 54 −13 L 0
0 22 L 4 L2 0 0 13 L−
3 L2 0
−22 L 0 0 4 L2 −13 L 0 0 −3 L2
54 0 0 −13 L 156 0 0 22 L
0 54 13 L 0 0 156 −22 L 0
0 −13 L −3 L2 0 0 −22 L 4 L2 0
13 L 0 0 −3 L2 22 L 0 0 4 L2
. Eq. 2.58
[ M s] =ρ I
30 L
36 0 0 −3 L −36 0 0 −3 L
0 36 3 L 0 0−
36 3 L 0
0 3 L 4 L2 0 0 −3 L − L2 0
−3 L 0 0 4 L2 3 L 0 0 − L2
−36 0 0 3 L 36 0 0 3 L
0 −36 −3 L 0 0 36 −3 L 0
0 3 L − L2 0 0 −3 L 4 L2 0
−3 L 0 0 − L2 3 L 0 0 4 L2
. Eq. 2.59
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 37/147
Capítulo 2 Revisão Teórica 18
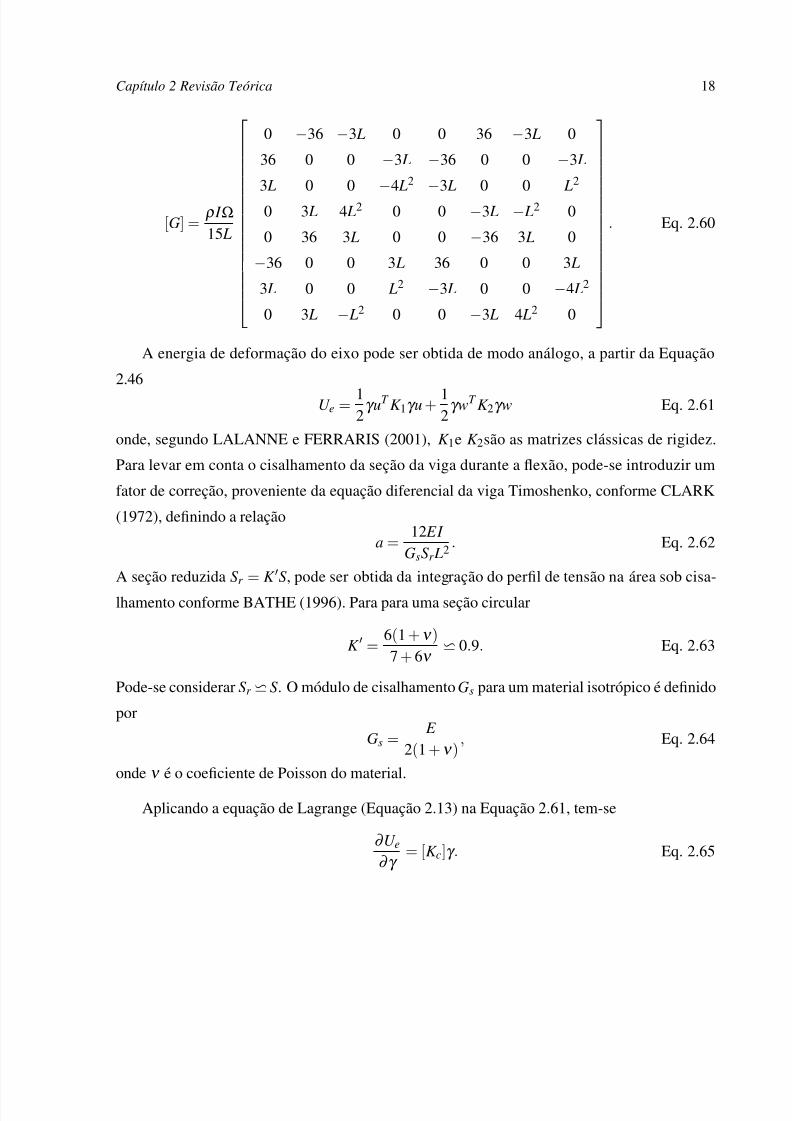
[G] =ρ I Ω15 L
0 −36 −3 L 0 0 36 −3 L 0
36 0 0 −3 L −36 0 0 −3 L
3 L 0 0−
4 L2
−3 L 0 0 L2
0 3 L 4 L2 0 0 −3 L − L2 0
0 36 3 L 0 0 −36 3 L 0
−36 0 0 3 L 36 0 0 3 L
3 L 0 0 L2 −3 L 0 0 −4 L2
0 3 L − L2 0 0 −3 L 4 L2 0
. Eq. 2.60
A energia de deformação do eixo pode ser obtida de modo análogo, a partir da Equação
2.46
U e = 12γ uT K 1γ u + 1
2γ wT K 2γ w Eq. 2.61
onde, segundo LALANNE e FERRARIS (2001), K 1e K 2são as matrizes clássicas de rigidez.
Para levar em conta o cisalhamento da seção da viga durante a flexão, pode-se introduzir um
fator de correção, proveniente da equação diferencial da viga Timoshenko, conforme CLARK
(1972), definindo a relação
a =12EI
GsSr L2 . Eq. 2.62
A seção reduzida Sr = K S, pode ser obtida da integração do perfil de tensão na área sob cisa-
lhamento conforme BATHE (1996). Para para uma seção circular
K =6(1 +ν )
7 + 6ν 0.9. Eq. 2.63
Pode-se considerar Sr S. O módulo de cisalhamento Gs para um material isotrópico é definido
por
Gs =E
2(1 +ν ), Eq. 2.64
onde ν é o coeficiente de Poisson do material.
Aplicando a equação de Lagrange (Equação 2.13) na Equação 2.61, tem-se
∂ U e∂γ
= [K c]γ . Eq. 2.65
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 38/147
Capítulo 2 Revisão Teórica 19
A matriz obtida é
[K c] =EI
(1 + a) L3
12 0 0 −6 L −12 0 0 −6 L
0 12 6 L 0 0 −12 6 L 00 6 L (4 + a) L2 0 0 −6 L (2−a) L2 0
−6 L 0 0 (4 + a) L2 6 L 0 0 (2−a) L2
−12 0 0 6 L 12 0 0 6 L
0 −12 −6 L 0 0 12 −6 L 0
0 6 L (2−a) L2 0 0 −6 L (4 + a) L2 0
−6 L 0 0 (2−a) L2 6 L 0 0 (4 + a) L2
.
Eq. 2.66
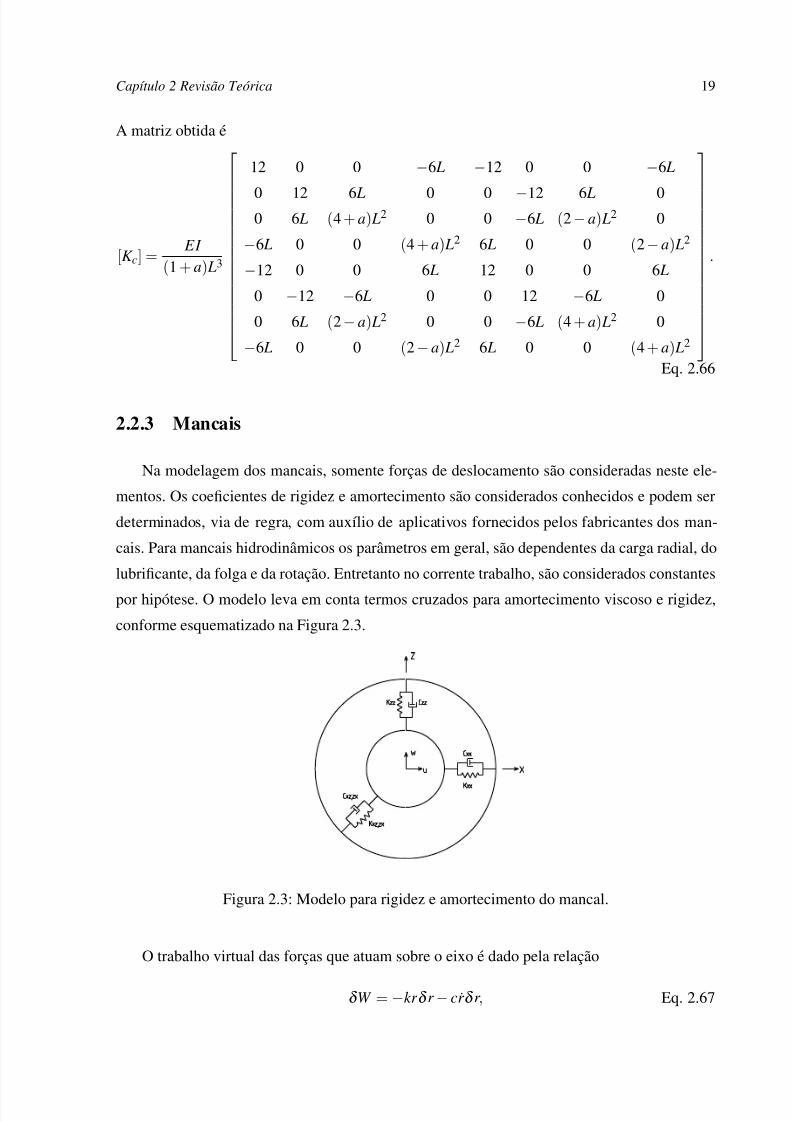
2.2.3 Mancais
Na modelagem dos mancais, somente forças de deslocamento são consideradas neste ele-
mentos. Os coeficientes de rigidez e amortecimento são considerados conhecidos e podem ser
determinados, via de regra, com auxílio de aplicativos fornecidos pelos fabricantes dos man-
cais. Para mancais hidrodinâmicos os parâmetros em geral, são dependentes da carga radial, do
lubrificante, da folga e da rotação. Entretanto no corrente trabalho, são considerados constantes
por hipótese. O modelo leva em conta termos cruzados para amortecimento viscoso e rigidez,
conforme esquematizado na Figura 2.3.
Figura 2.3: Modelo para rigidez e amortecimento do mancal.
O trabalho virtual das forças que atuam sobre o eixo é dado pela relação
δ W = −kr δ r − cr δ r , Eq. 2.67
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 39/147
Capítulo 2 Revisão Teórica 20
sendo
kr δ r = k xxuδ u + k xzwδ u + k zxuδ w + k zzwδ w, Eq. 2.68
cr δ r = c xxuδ u + c xzwδ u + c zxuδ w + c zzwδ w, Eq. 2.69ou na forma matricial
F u
F w
= −
k xx k xz
k zx k zz
u
w
− c xx c xz
c zx c zz
u
w
. Eq. 2.70
Formulação por Elementos Finitos
Para os mancais, são desprezadas possíveis reações à momentos fletores e rotações, sendoas matrizes obtidas diretamente da Equação 2.67
F u = −k xxu− k xzw− c xxu− c xzw Eq. 2.71
e
F w = −k zzw− k zxu− c zzw− c zxu, Eq. 2.72
como é suposta nula a rigidez do mancal para qualquer rotação θ ou ψ . Assim, as forças
decorrentes também são nulas. Ou seja F θ = 0 e F ψ = 0, obtendo-se a equação
F u
F θ
F w
F ψ
= −
k xx 0 k xz 0
0 0 0 0
k zx 0 k zz 0
0 0 0 0
u
θ
w
ψ
−
c xx 0 c xz 0
0 0 0 0
c zx 0 c zz 0
0 0 0 0
u
θ
w
ψ
. Eq. 2.73
2.2.4 Excitação Tipo Desbalanceamento
Em sistemas rotativos o desbalanceamento residual é uma excitação sempre presente em
maior ou menor grau. A força depende da rotação Ω e segundo LALANNE e FERRARIS
(2001), é dada pela relação
F (Ω) = mr eΩ2, Eq. 2.74
onde mr e representa diretamente o desbalanceamento residual, cuja unidade comumente em-
pregada é o grama-milímetro (1(g.mm) = 10−6(kg.m)).

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 40/147
Capítulo 2 Revisão Teórica 21
Figura 2.4: Massa residual mu.
A posição D pode ser obtida em termos de coordenadas generalizadas, para uma posição y
qualquer constante, através da transformação de coordenadas
D =
u + r 2 sinΩt
constante
w + r 2 cosΩt
, Eq. 2.75
e a velocidade através de
˙ D =
u + r 2ΩcosΩt 0
w− r 2ΩsinΩt
. Eq. 2.76
A energia cinética associada à massa residual mu, conforme LALANNE e FERRARIS (2001)
pode ser aproximada através da relação
T u ∼= mur 2Ω(q1 cosΩt − q2 sinΩt ). Eq. 2.77
Aplicando a equação de Lagrange (Equação 2.35) na expressão para energia cinética (equaçãoEquação 2.77), para uma massa mu situada no eixo z em t = 0 (Figura 2.4), segundo LALANNE
e FERRARIS (2001), obtém-se
d dt
∂ T u∂ γ
− ∂ T u∂γ
= −(mur )Ω2
sinΩt
cosΩt
. Eq. 2.78
A transformada de Fourier para a excitação periódica (desbalanceamento) a ser considerada
no vetor de força F (Ω) para as coordenadas uew correspondentes à i-ésima coordenada
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 41/147
Capítulo 2 Revisão Teórica 22
generalizada excitada tem a forma
F (Ω) ⇒
...
uw
θ
ψ
...
⇒
...
i(mur )Ω2
−(mur )Ω2
0
0
...
. Eq. 2.79
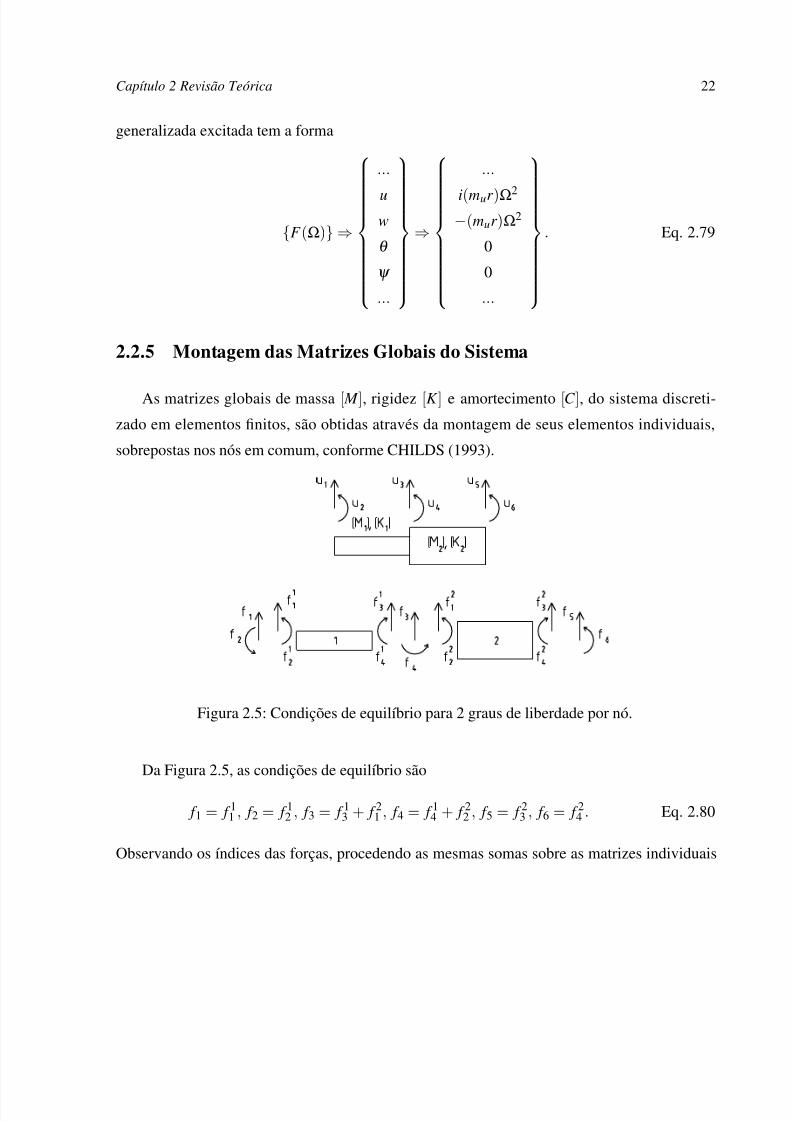
2.2.5 Montagem das Matrizes Globais do Sistema
As matrizes globais de massa [ M ], rigidez [K ] e amortecimento [C ], do sistema discreti-
zado em elementos finitos, são obtidas através da montagem de seus elementos individuais,
sobrepostas nos nós em comum, conforme CHILDS (1993).
Figura 2.5: Condições de equilíbrio para 2 graus de liberdade por nó.
Da Figura 2.5, as condições de equilíbrio são
f 1 = f 11 , f 2 = f 12 , f 3 = f 13 + f 21 , f 4 = f 14 + f 22 , f 5 = f 23 , f 6 = f 24 . Eq. 2.80
Observando os índices das forças, procedendo as mesmas somas sobre as matrizes individuais
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 42/147
Capítulo 2 Revisão Teórica 23
de massa dos elementos [ M 1] e [ M 2], obtém-se a matriz global
[ M ] =
m111 m1
12 m113 m1
14 0 0
m121 m122 m123 m124 0 0m1
31 m132
m1
33 + m211
m1
34 + m212
m2
13 m214
m141 m1
42
m1
43 + m221
m1
44 + m222
m2
23 m224
0 0 m231 m2
32 m233 m2
34
0 0 m241 m1
42 m243 m2
44
. Eq. 2.81
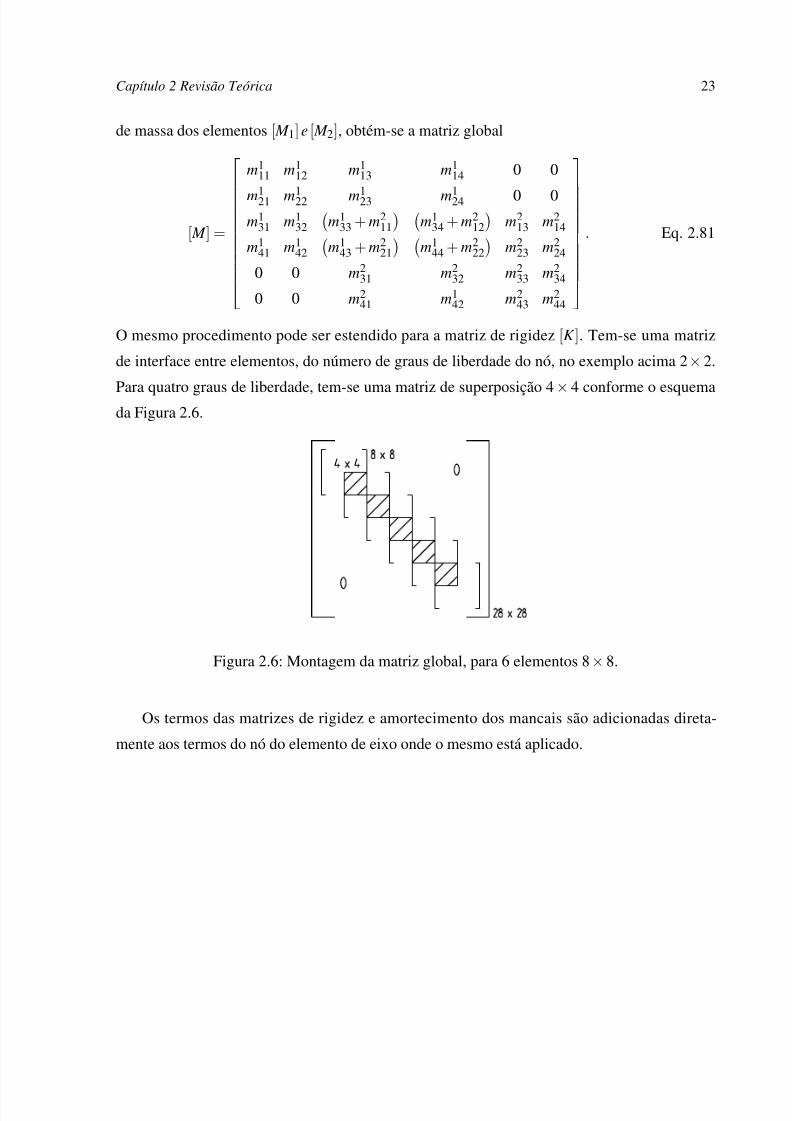
O mesmo procedimento pode ser estendido para a matriz de rigidez [K ]. Tem-se uma matriz
de interface entre elementos, do número de graus de liberdade do nó, no exemplo acima 2 ×2.
Para quatro graus de liberdade, tem-se uma matriz de superposição 4 × 4 conforme o esquemada Figura 2.6.
Figura 2.6: Montagem da matriz global, para 6 elementos 8 ×8.
Os termos das matrizes de rigidez e amortecimento dos mancais são adicionadas direta-
mente aos termos do nó do elemento de eixo onde o mesmo está aplicado.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 43/147
Capítulo 2 Revisão Teórica 24
2.3 O Material Viscoelástico
Nesta seção é revisado o comportamento do material viscoelástico e o modelo utilizado para
descrever seu comportamento, já que o mesmo é empregado para o projeto de neutralizadores
dinâmicos.
Materiais viscoelásticos, devido sua alta capacidade de dissipar energia, são utilizados com
êxito no controle e isolamento de vibrações e ruído. Este tipo de material tem o comportamento
elástico definido pela deformação imposta e também pressupõe a existência de uma função de
relaxação da tensão devido a sua capacidade de escoamento viscoso.
Suas características dinâmicas, o módulo de cisalhamento (Gr ) e fator de perda (η), variam
com a temperatura e com a freqüência, principalmente.
2.3.1 Relação Constitutiva Generalizada
Uma das principais características de materiais viscoelásticos é que a tensão σ (t ) e suas
derivadas dependem da deformação ε (t ) e suas derivadas, sendo que, de modo generalizado,
pode-se escrever (2) a relação
b0σ (t ) + b1d κ 1σ (t )
dt κ 1+ ... + bn
d κ nσ (t )dt κ n
= aoε (t ) + a1d β 1ε (t )
dt β 1+ ... + am
d β mε (t )
dt β m. Eq. 2.82
Segundo JONES (2001), com este modelo não é possível representar corretamente o comporta-
mento dinâmico do material viscoelástico, numa ampla faixa de freqüência, com poucos termos
da relação acima (Equação 2.82) e utilizando somente valores inteiros para β e κ .
No entanto, operadores integro-diferenciais podem ser definidos para quaisquer β e κ reais
(3). No domínio do tempo, a expressão diferencial generalizada em termos deβ ∈R |0 < β < 1,
assume uma forma pouco usual para aplicação direta (Riemann-Liouville)
d β σ (t )
dt β =
1Γ (1−β )
d dt
t
0
σ (τ )
(t − τ )β d τ . Eq. 2.83
A função gama que generaliza a função fatorial para números reais, Γ (n + 1) = n! é definida
como
Γ ( x) = ∞
0t ( x−1)e−t dt . Eq. 2.84
O modelo de derivada fracionária encontra sua real aplicação no domínio da freqüência. Apli-
2Para materiais elásticos clássicos, no caso unidimensional, tensão e deformação estão relacionados pela lei deHooke: σ E ε , onde E é o módulo de elasticidade do material (Young).
3A diferenciação também pode ser definida para valores complexos de β ou κ .
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 44/147
Capítulo 2 Revisão Teórica 25
cando a transformada de Fourier sobre a Equação 2.82 reduzida aos primeiros dois termos,
obtém-se a expressão para o módulo de elasticidade complexo dada pela relação
E (Ω) = a0 + a1(iΩ)β
b0 + b1(iΩ)κ , Eq. 2.85
assumindo que κ = β , obtém-se o modelo de derivada fracionária de quatro parâmetros
E (Ω) =ao + a1(iΩ)β
b0 + b1(iΩ)β . Eq. 2.86
Este modelo, como apresentado por PRITZ (1996) e JONES (2001), representa de forma satis-
fatória o comportamento dinâmico de uma grande gama de materiais viscoelásticos utilizados
em engenharia.A expressão para o módulo de cisalhamento complexo, obtida de modo totalmente similar
a Equação 2.86, é dada por
G(Ω) =a0 + a1(iΩ)β
b0 + b1(iΩ)β . Eq. 2.87
A representação complexa para o módulo de cisalhamento, a uma determinada freqüência e
temperatura pode ser redefinida como
¯G(Ω
) = Gr (1 + iη(Ω
)), Eq. 2.88
sendo o “módulo de cisalhamento dinâmico” propriamente dito, dado pela parte real
Gr (Ω) = Re(G(Ω)), Eq. 2.89
e o fator de perda do material pela relação entre as partes imaginária e real (4).
η(Ω) =Im(G(Ω))
Re(G(Ω)). Eq. 2.90
A mesma representação se aplica ao módulo de elasticidade dinâmico E (Ω).
2.3.2 Efeito da Temperatura
O módulo de cisalhamento e o fator de perda dos materiais viscoelásticos variam com a
temperatura de operação. Em geral, o módulo de cisalhamento aumenta com a freqüência e
diminui com a temperatura.
Para materiais ditos “plásticos” a temperatura de “amolecimento” T s é razoavelmente alta,4η representa a tangente do argumento do número complexo G(Ω)(o ângulo de defasagem).
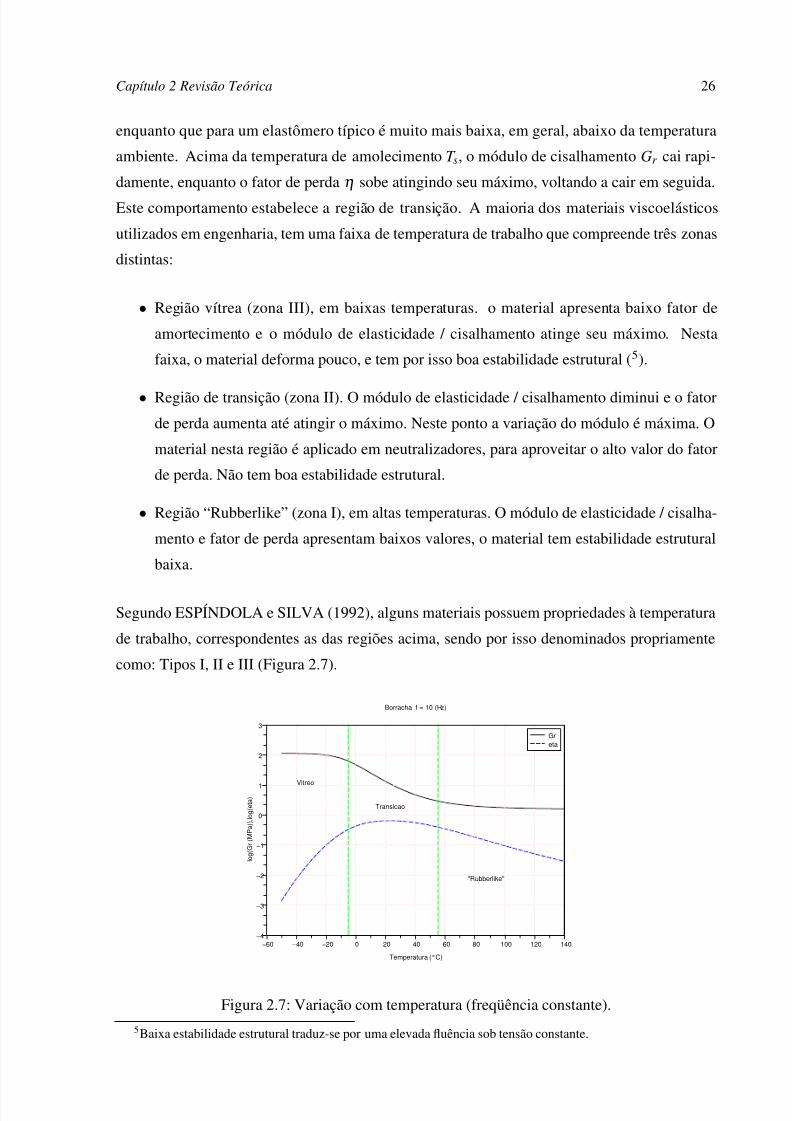
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 45/147
Capítulo 2 Revisão Teórica 26
enquanto que para um elastômero típico é muito mais baixa, em geral, abaixo da temperatura
ambiente. Acima da temperatura de amolecimento T s, o módulo de cisalhamento Gr cai rapi-
damente, enquanto o fator de perda η sobe atingindo seu máximo, voltando a cair em seguida.
Este comportamento estabelece a região de transição. A maioria dos materiais viscoelásticos
utilizados em engenharia, tem uma faixa de temperatura de trabalho que compreende três zonas
distintas:
• Região vítrea (zona III), em baixas temperaturas. o material apresenta baixo fator de
amortecimento e o módulo de elasticidade / cisalhamento atinge seu máximo. Nesta
faixa, o material deforma pouco, e tem por isso boa estabilidade estrutural ( 5).
• Região de transição (zona II). O módulo de elasticidade / cisalhamento diminui e o fatorde perda aumenta até atingir o máximo. Neste ponto a variação do módulo é máxima. O
material nesta região é aplicado em neutralizadores, para aproveitar o alto valor do fator
de perda. Não tem boa estabilidade estrutural.
• Região “Rubberlike” (zona I), em altas temperaturas. O módulo de elasticidade / cisalha-
mento e fator de perda apresentam baixos valores, o material tem estabilidade estrutural
baixa.
Segundo ESPÍNDOLA e SILVA (1992), alguns materiais possuem propriedades à temperatura
de trabalho, correspondentes as das regiões acima, sendo por isso denominados propriamente
como: Tipos I, II e III (Figura 2.7).
Vitreo
Transicao
"Rubberlike"
−60 −40 −20 0 20 40 60 80 100 120 140
−4
−3
−2
−1
0
1
2
3
Borracha f = 10 (Hz)
Temperatura (°C)
l o g ( G r ( M P a ) ) , l o g ( e t a )
Gr
eta
Figura 2.7: Variação com temperatura (freqüência constante).
5Baixa estabilidade estrutural traduz-se por uma elevada fluência sob tensão constante.
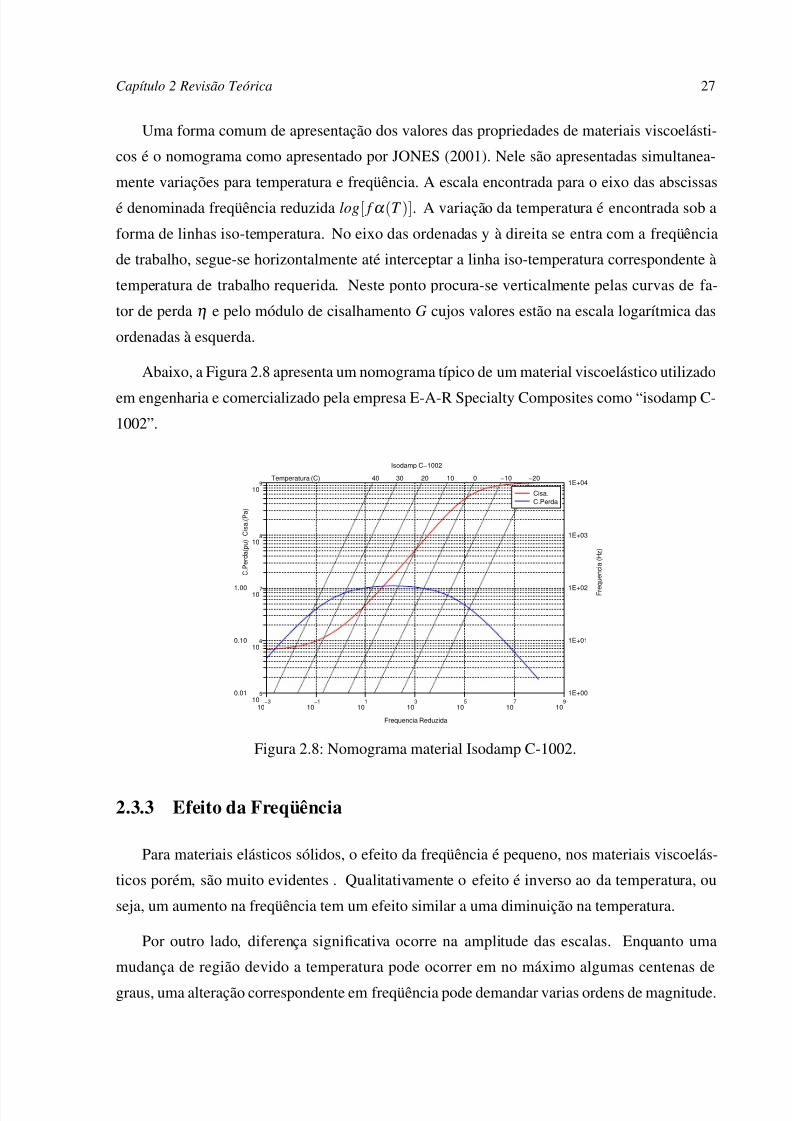
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 46/147
Capítulo 2 Revisão Teórica 27
Uma forma comum de apresentação dos valores das propriedades de materiais viscoelásti-
cos é o nomograma como apresentado por JONES (2001). Nele são apresentadas simultanea-
mente variações para temperatura e freqüência. A escala encontrada para o eixo das abscissas
é denominada freqüência reduzida log[ f α (T )]. A variação da temperatura é encontrada sob a
forma de linhas iso-temperatura. No eixo das ordenadas y à direita se entra com a freqüência
de trabalho, segue-se horizontalmente até interceptar a linha iso-temperatura correspondente à
temperatura de trabalho requerida. Neste ponto procura-se verticalmente pelas curvas de fa-
tor de perda η e pelo módulo de cisalhamento G cujos valores estão na escala logarítmica das
ordenadas à esquerda.
Abaixo, a Figura 2.8 apresenta um nomograma típico de um material viscoelástico utilizado
em engenharia e comercializado pela empresa E-A-R Specialty Composites como “isodamp C-1002”.
1E+00
1E+01
1E+02
1E+03
1E+04
F r e
q u e n c i a ( H z )
40 30 20 10 0 −10 −20Temperatura (C)
0.01
0.10
1.00
−310
−110
110
310
510
710
910
510
610
710
810
910
Isodamp C−1002
Frequencia Reduzida
C . P e r d a ( p u )
C i s a . ( P a )
Cisa.
C.Perda
Figura 2.8: Nomograma material Isodamp C-1002.
2.3.3 Efeito da Freqüência
Para materiais elásticos sólidos, o efeito da freqüência é pequeno, nos materiais viscoelás-
ticos porém, são muito evidentes . Qualitativamente o efeito é inverso ao da temperatura, ou
seja, um aumento na freqüência tem um efeito similar a uma diminuição na temperatura.
Por outro lado, diferença significativa ocorre na amplitude das escalas. Enquanto uma
mudança de região devido a temperatura pode ocorrer em no máximo algumas centenas de
graus, uma alteração correspondente em freqüência pode demandar varias ordens de magnitude.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 47/147
Capítulo 2 Revisão Teórica 28
Uma escala em freqüência pode ir tipicamente de 10−8 até 108 (Hz) (6).
2.3.4 Outros Efeitos
Amplitude da deformação dinâmica: Os parâmetros do material viscoelástico sofrem vari-
ação em função da deformação. Para grandes deformações cíclicas, devido ao elevado fator de
perda, é provocada uma geração interna de calor e portanto um aumento na temperatura do ma-
terial. Esta variação é muito difícil de modelar. Em geral, o módulo de cisalhamento se reduz e
o fator de perda aumenta com o aumento da deformação. Se a deformação aumenta ainda mais,
o fator de perda volta a diminuir e o módulo de cisalhamento tende à estabilidade (NASHIF et
al. (1985)).Pré-carga estática: Importante quando o material trabalha na região “Rubberlike”. O mó-
dulo de cisalhamento aumenta, enquanto o fator de perda cai com o aumento da pré-carga
(NASHIF et al. (1985)).
2.3.5 Efeito Combinado de Temperatura e Freqüência
Quando tanto a freqüência quanto a temperatura variam, como geralmente acontece na
prática, é possível combinar os efeitos da variação de ambos em uma só variável, a freqüência
reduzida. Esta combinação é baseada no fato que o valor do módulo da rigidez complexa, em
qualquer freqüência f 1e qualquer temperatura de referência T 1 arbitrários, é idêntico a um outro,
em outra freqüência f 2 e temperatura T 2 de forma a satisfazer a relação
G( f 1, T 1) = G( f 2α (T 2)) , Eq. 2.91
a função α (T 2) pode ser determinada experimentalmente e plotada num gráfico do tipo logα (T )
versus 1T .
As temperaturas em questão são absolutas (K ). Uma das funções α (T ) mais utilizadas,
denominada “shift factor” ou fator de deslocamento é a WLF (Williams-Landel-Ferry), onde
θ 1 e θ 1 são constantes à determinar, que dependem do material e T 0 é uma temperatura de
referência, arbitrariamente escolhida. O fator de deslocamento é definido pela equação
logα (T ) = −θ 1(T −T 0)
(θ 2 + T −T 0). Eq. 2.92
Determinando-se adequadamente os parâmetros da Equação 2.86, obtém-se as relações:6A escala no tempo pode corresponder a anos.

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 48/147
Capítulo 2 Revisão Teórica 29
b0 = 1 e a0b0
= E 0b0
= E 0, logo a1b1
= E 1b1
= E ∞.
Com o fator de deslocamento α (T ) determinado, pode-se obter as expressões finais para os
módulos de elasticidade e cisalhamento em função da freqüência reduzida Ωα (T ):
E (Ω) =E 0 + E ∞b1(iΩα (T ))β
1 + b1(iΩα (T ))β Eq. 2.93
G(Ω) =G0 + G∞b1(iΩα (T ))β
1 + b1(iΩα (T ))β , Eq. 2.94
onde G0 representa o valor assintótico do módulo para freqüências muito baixas e G∞ para
freqüências muito altas.
A potência de um número imaginário puro pode ser representada por uma função trigono-métrica complexa: iβ = cosβ π 2 + i sinβ π 2 . Aplicando esta relação na Equação 2.94, obtém-se
G(Ω) =G0 + G∞b1(Ωα (T ))β
cosβ π 2 + isinβ π 2
1 + b1(Ωα (T ))β
cosβ π 2 + isinβ π 2
, Eq. 2.95
o que possibilita a separação da parte real Gr (Ω) e do fator de perda η(Ω) conforme
Gr (Ω) =G0 + (G0 + G∞) b1(Ωα (T ))β cosβ π 2 + G∞b2
1(Ωα (T ))2β
1 + 2b1(Ωα (T ))β cosβ π 2 + b21(Ωα (T ))2β
, Eq. 2.96
η(Ω) =(G∞−G0) b1(Ωα (T ))β sinβ π 2
G0 + (G0 + G∞) b1(Ωα (T ))β cosβ π 2 + G∞b21(Ωα (T ))2β
. Eq. 2.97
2.4 Sistemas com Um Grau de Liberdade
Nesta seção são revisados os modelos para sistemas de um grau de liberdade do tipo massa-
mola-amortecimento, abordando os modelos de amortecimento viscoso e viscoelástico e defi-
nições de grandezas relacionadas, como introdutório para o controle de vibração.
2.4.1 Modelo Viscoso
Aplicando a equação do movimento (Equação 2.37) para um sistema de um grau de liber-
dade (Figura 2.9), o sistema de equações diferenciais resume-se à expressão
m ¨ x(t ) + c ˙ x(t ) + kx(t ) = f (t ). Eq. 2.98

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 49/147
Capítulo 2 Revisão Teórica 30
Figura 2.9: Sistema massa mola 1gl, modelo viscoso.
Considerando o sistema em regime permanente, pode-se aplicar diretamente a transformada
de Fourier e obter a expressão
(−Ω2m + iΩc + k ) X (Ω) = F (Ω). Eq. 2.99
A função resposta em freqüência (FRF), receptância, é definida pela relação
H (Ω)X (Ω)
F (Ω)=
1−Ω2m + iΩc + k
. Eq. 2.100
Também podem ser definidas ainda expressões para:
• Mobilidade, γ (Ω) = iΩ H (Ω).
• Inertância, A(Ω) = −Ω2 H (Ω).
As funções complementares inversas, também características do sistema são:
• Rigidez dinâmica, K (Ω) F (Ω) X (Ω)
= −Ω2m + iΩc + k .
•Impedância mecânica, Z (Ω) K (Ω)
iΩ.
• Massa dinâmica, M (Ω) K (Ω)−Ω2 .
São definidas ainda as relações auxiliares para:
• Freqüência natural não amortecida, Ωn
k m .
• Amortecimento crítico, cc 2mΩn.
• Razão de amortecimento, ζ ccc
.
• Razão de freqüências, ε = ΩΩn
.
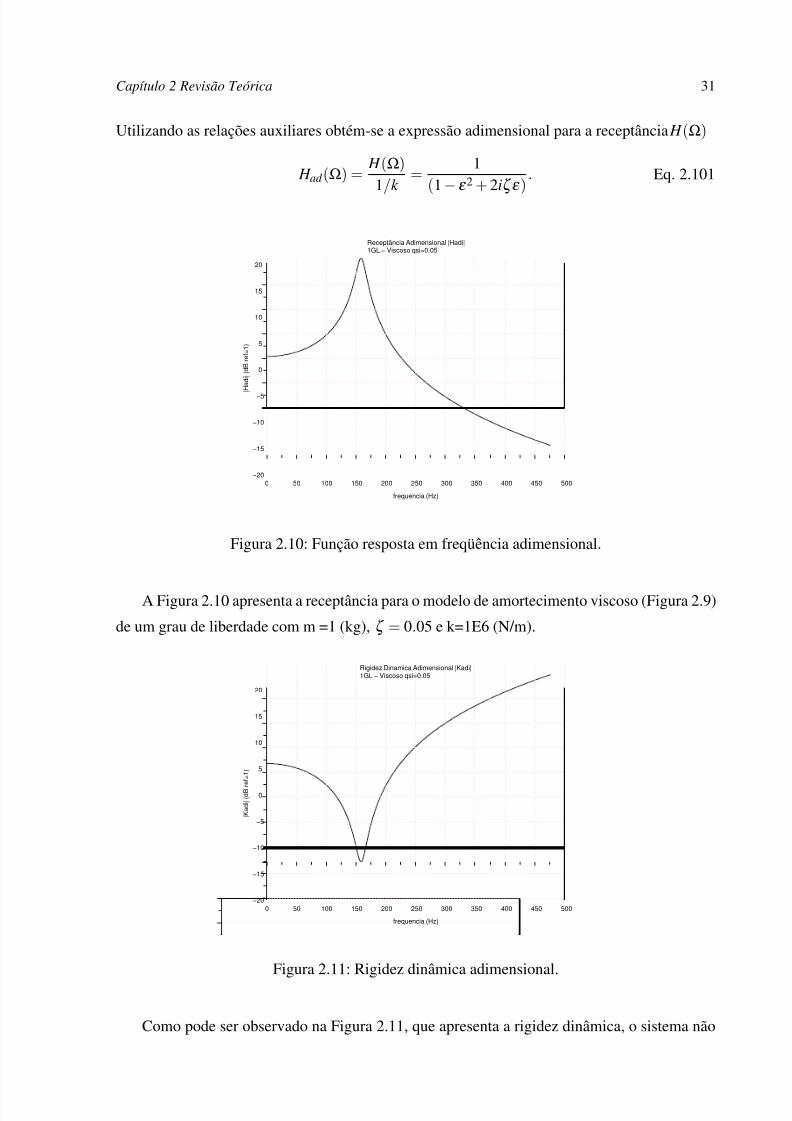
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 50/147
Capítulo 2 Revisão Teórica 31
Utilizando as relações auxiliares obtém-se a expressão adimensional para a receptância H (Ω)
H ad (Ω) =H (Ω)
1/k =
1(1
−ε 2 + 2iζε )
. Eq. 2.101
0 50 100 150 200 250 300 350 400 450 500
−20
−15
−10
−5
0
5
10
15
20
Receptância Adimensional |Hadi|1GL − Viscoso qsi=0.05
frequencia (Hz)
| H a d i | ( d B r
e f = 1 )
Figura 2.10: Função resposta em freqüência adimensional.
A Figura 2.10 apresenta a receptância para o modelo de amortecimento viscoso (Figura 2.9)
de um grau de liberdade com m =1 (kg), ζ = 0.05 e k=1E6 (N/m).
0 50 100 150 200 250 300 350 400 450 500
−20
−15
−10
−5
0
5
10
15
20
Rigidez Dinamica Adimensional |Kadi|1GL − Viscoso qsi=0.05
frequencia (Hz)
| K a d i | ( d B r
e f = 1 )
Figura 2.11: Rigidez dinâmica adimensional.
Como pode ser observado na Figura 2.11, que apresenta a rigidez dinâmica, o sistema não
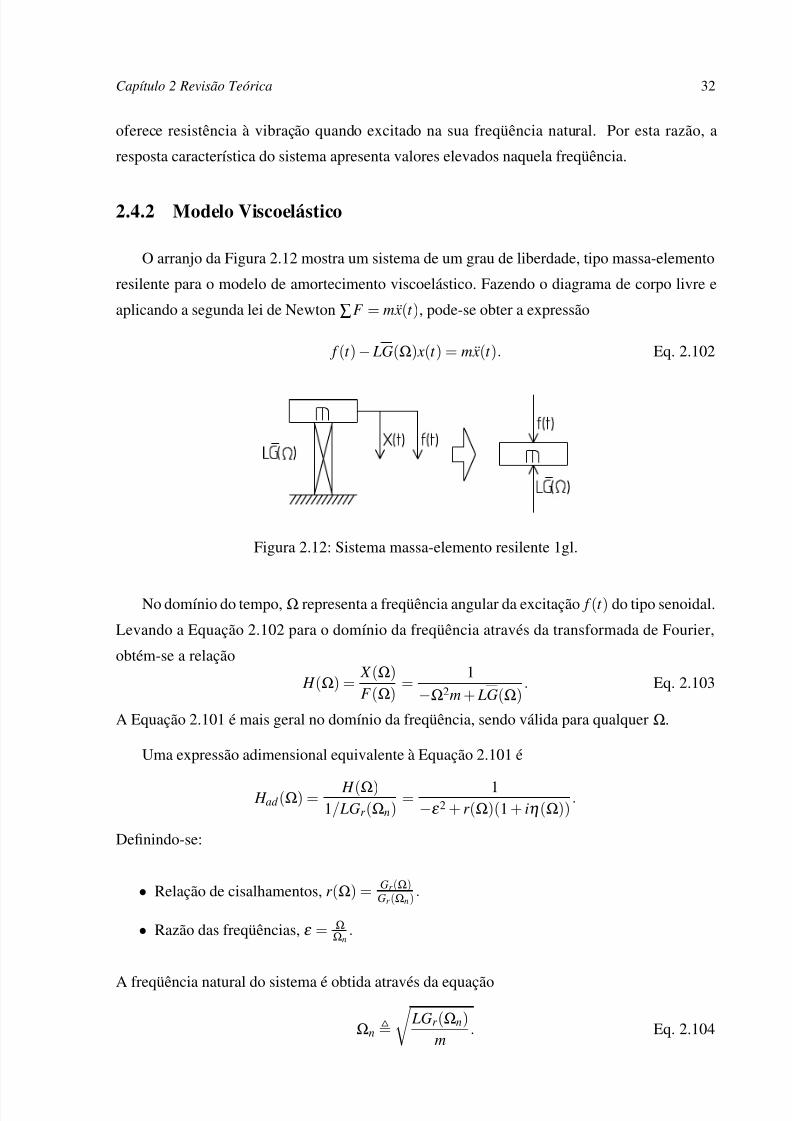
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 51/147
Capítulo 2 Revisão Teórica 32
oferece resistência à vibração quando excitado na sua freqüência natural. Por esta razão, a
resposta característica do sistema apresenta valores elevados naquela freqüência.
2.4.2 Modelo Viscoelástico
O arranjo da Figura 2.12 mostra um sistema de um grau de liberdade, tipo massa-elemento
resilente para o modelo de amortecimento viscoelástico. Fazendo o diagrama de corpo livre e
aplicando a segunda lei de Newton ∑F = m ¨ x(t ), pode-se obter a expressão
f (t ) − LG(Ω) x(t ) = m ¨ x(t ). Eq. 2.102
Figura 2.12: Sistema massa-elemento resilente 1gl.
No domínio do tempo, Ω representa a freqüência angular da excitação f (t ) do tipo senoidal.
Levando a Equação 2.102 para o domínio da freqüência através da transformada de Fourier,
obtém-se a relação
H (Ω) =X (Ω)
F (Ω)=
1
−Ω2m + LG(Ω). Eq. 2.103
A Equação 2.101 é mais geral no domínio da freqüência, sendo válida para qualquer Ω.
Uma expressão adimensional equivalente à Equação 2.101 é
H ad (Ω) = H (Ω)1/ LGr (Ωn)
= 1−ε 2 + r (Ω)(1 + iη(Ω))
.
Definindo-se:
• Relação de cisalhamentos, r (Ω) = Gr (Ω)Gr (Ωn)
.
• Razão das freqüências, ε = ΩΩn
.
A freqüência natural do sistema é obtida através da equação
Ωn
LGr (Ωn)
m. Eq. 2.104
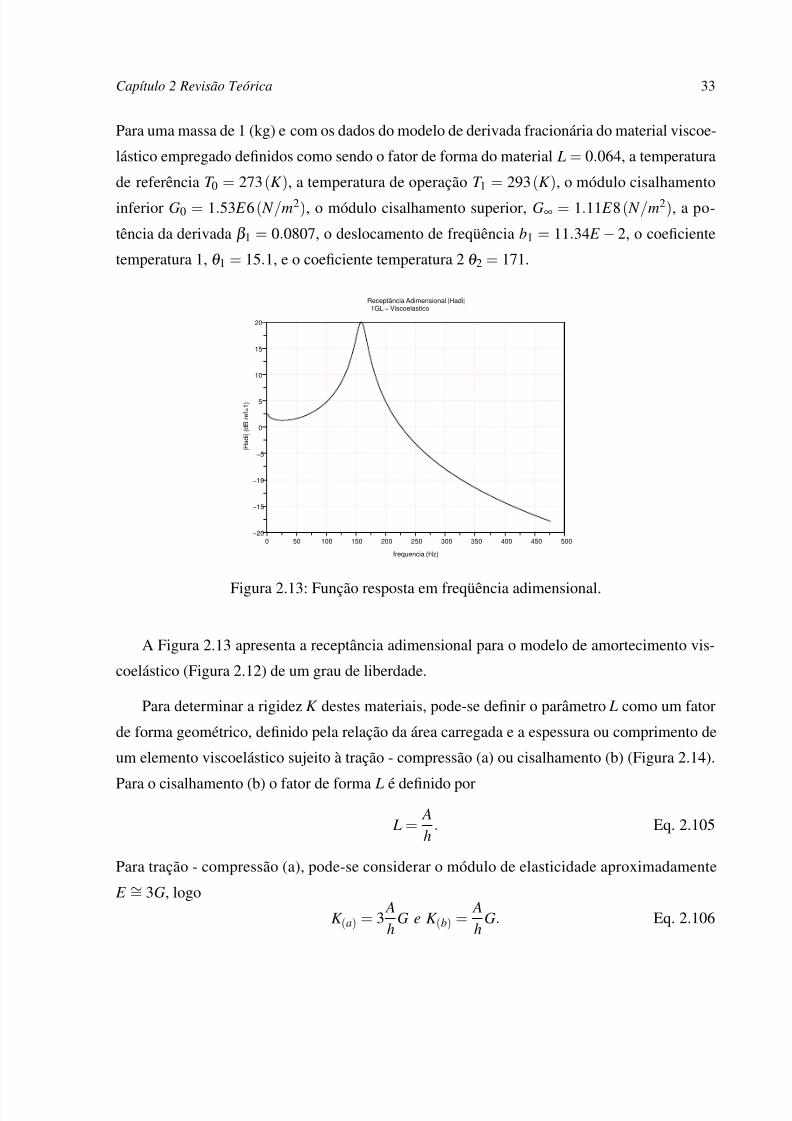
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 52/147
Capítulo 2 Revisão Teórica 33
Para uma massa de 1 (kg) e com os dados do modelo de derivada fracionária do material viscoe-
lástico empregado definidos como sendo o fator de forma do material L = 0.064, a temperatura
de referência T 0 = 273(K ), a temperatura de operação T 1 = 293(K ), o módulo cisalhamento
inferior G0 = 1.53E 6( N /m2), o módulo cisalhamento superior, G∞ = 1.11E 8( N /m2), a po-
tência da derivada β 1 = 0.0807, o deslocamento de freqüência b1 = 11.34E − 2, o coeficiente
temperatura 1, θ 1 = 15.1, e o coeficiente temperatura 2 θ 2 = 171.
0 50 100 150 200 250 300 350 400 450 500
−20
−15
−10
−5
0
5
10
15
20
Receptância Adimensional |Hadi|1GL − Viscoelastico
frequencia (Hz)
| H a d i | ( d B r
e f = 1 )
Figura 2.13: Função resposta em freqüência adimensional.
A Figura 2.13 apresenta a receptância adimensional para o modelo de amortecimento vis-
coelástico (Figura 2.12) de um grau de liberdade.
Para determinar a rigidez K destes materiais, pode-se definir o parâmetro L como um fator
de forma geométrico, definido pela relação da área carregada e a espessura ou comprimento de
um elemento viscoelástico sujeito à tração - compressão (a) ou cisalhamento (b) (Figura 2.14).
Para o cisalhamento (b) o fator de forma L é definido por
L =Ah
. Eq. 2.105
Para tração - compressão (a), pode-se considerar o módulo de elasticidade aproximadamente
E ∼= 3G, logo
K (a) = 3 Ah
G e K (b) =Ah
G. Eq. 2.106
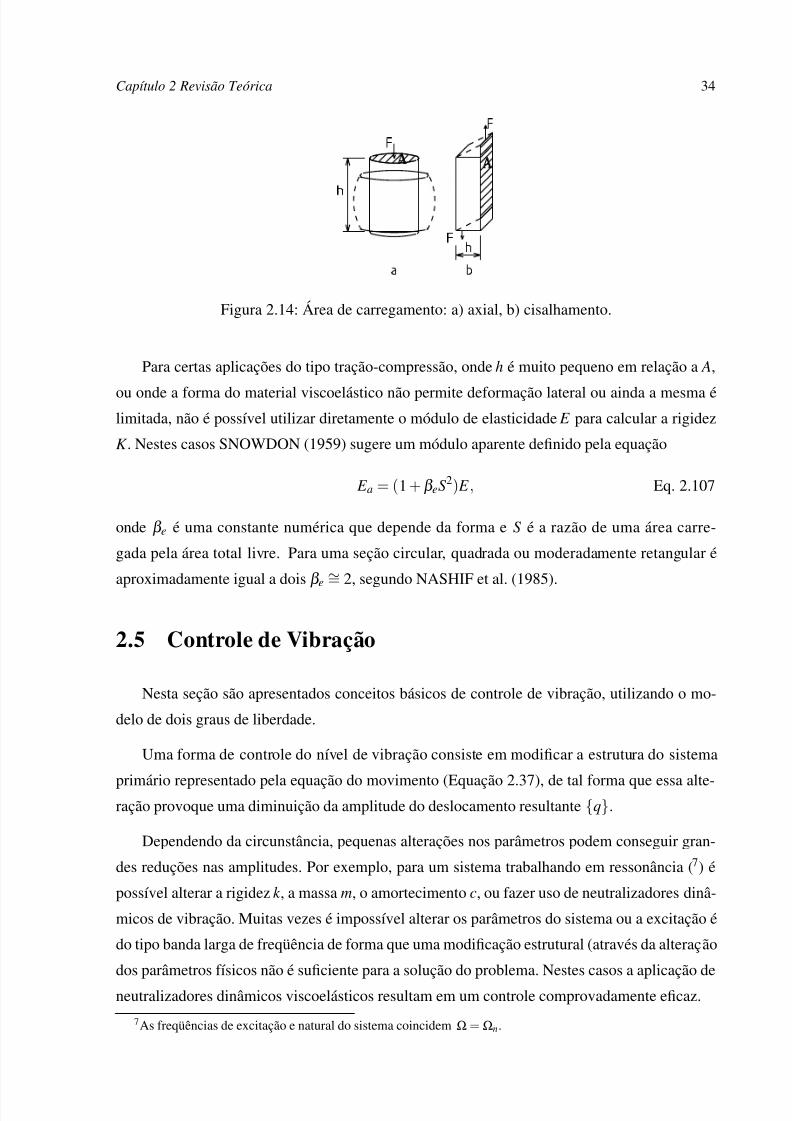
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 53/147
Capítulo 2 Revisão Teórica 34
Figura 2.14: Área de carregamento: a) axial, b) cisalhamento.
Para certas aplicações do tipo tração-compressão, onde h é muito pequeno em relação a A,
ou onde a forma do material viscoelástico não permite deformação lateral ou ainda a mesma élimitada, não é possível utilizar diretamente o módulo de elasticidade E para calcular a rigidez
K . Nestes casos SNOWDON (1959) sugere um módulo aparente definido pela equação
E a = (1 +β eS2)E , Eq. 2.107
onde β e é uma constante numérica que depende da forma e S é a razão de uma área carre-
gada pela área total livre. Para uma seção circular, quadrada ou moderadamente retangular é
aproximadamente igual a dois β e∼= 2, segundo NASHIF et al. (1985).
2.5 Controle de Vibração
Nesta seção são apresentados conceitos básicos de controle de vibração, utilizando o mo-
delo de dois graus de liberdade.
Uma forma de controle do nível de vibração consiste em modificar a estrutura do sistema
primário representado pela equação do movimento (Equação 2.37), de tal forma que essa alte-ração provoque uma diminuição da amplitude do deslocamento resultante q.
Dependendo da circunstância, pequenas alterações nos parâmetros podem conseguir gran-
des reduções nas amplitudes. Por exemplo, para um sistema trabalhando em ressonância (7) é
possível alterar a rigidez k , a massa m, o amortecimento c, ou fazer uso de neutralizadores dinâ-
micos de vibração. Muitas vezes é impossível alterar os parâmetros do sistema ou a excitação é
do tipo banda larga de freqüência de forma que uma modificação estrutural (através da alteração
dos parâmetros físicos não é suficiente para a solução do problema. Nestes casos a aplicação de
neutralizadores dinâmicos viscoelásticos resultam em um controle comprovadamente eficaz.
7As freqüências de excitação e natural do sistema coincidem Ω=Ωn.
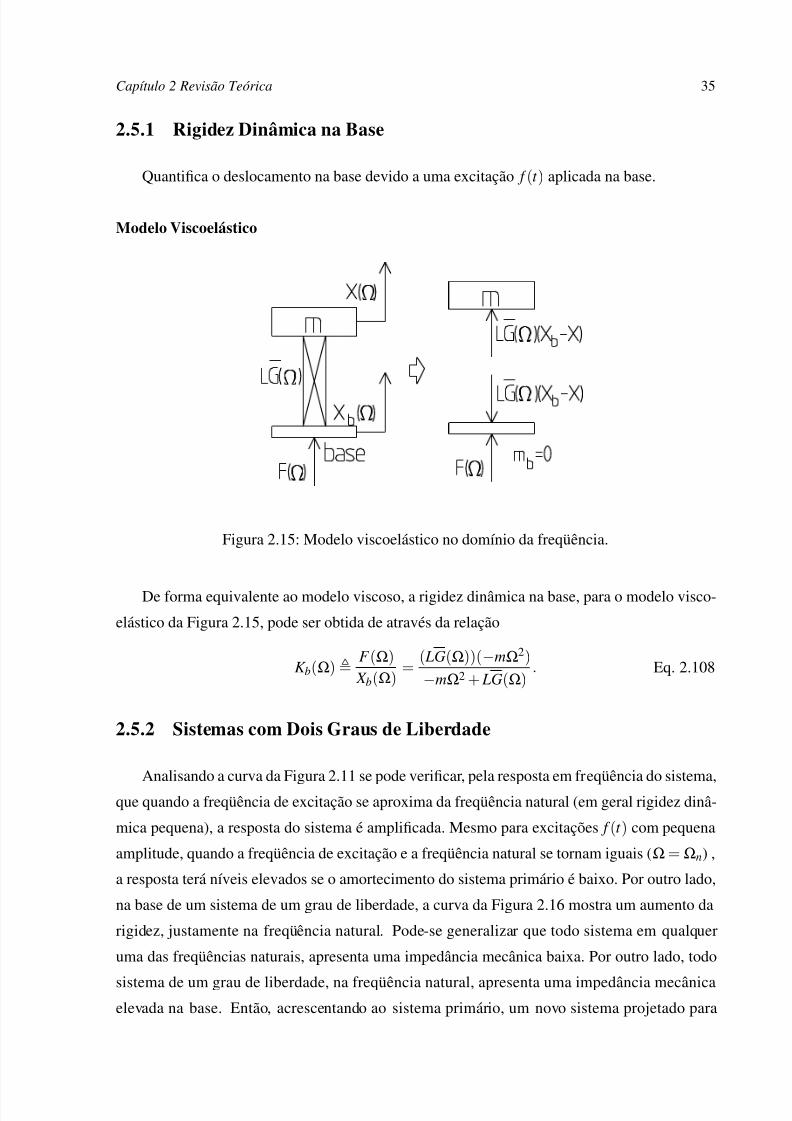
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 54/147
Capítulo 2 Revisão Teórica 35
2.5.1 Rigidez Dinâmica na Base
Quantifica o deslocamento na base devido a uma excitação f (t ) aplicada na base.
Modelo Viscoelástico
Figura 2.15: Modelo viscoelástico no domínio da freqüência.
De forma equivalente ao modelo viscoso, a rigidez dinâmica na base, para o modelo visco-
elástico da Figura 2.15, pode ser obtida de através da relação
K b(Ω)F (Ω)
X b(Ω)=
( LG(Ω))(−mΩ2)
−mΩ2 + LG(Ω). Eq. 2.108
2.5.2 Sistemas com Dois Graus de Liberdade
Analisando a curva da Figura 2.11 se pode verificar, pela resposta em freqüência do sistema,
que quando a freqüência de excitação se aproxima da freqüência natural (em geral rigidez dinâ-
mica pequena), a resposta do sistema é amplificada. Mesmo para excitações f (t ) com pequena
amplitude, quando a freqüência de excitação e a freqüência natural se tornam iguais (Ω=Ωn) ,
a resposta terá níveis elevados se o amortecimento do sistema primário é baixo. Por outro lado,
na base de um sistema de um grau de liberdade, a curva da Figura 2.16 mostra um aumento da
rigidez, justamente na freqüência natural. Pode-se generalizar que todo sistema em qualquer
uma das freqüências naturais, apresenta uma impedância mecânica baixa. Por outro lado, todo
sistema de um grau de liberdade, na freqüência natural, apresenta uma impedância mecânicaelevada na base. Então, acrescentando ao sistema primário, um novo sistema projetado para
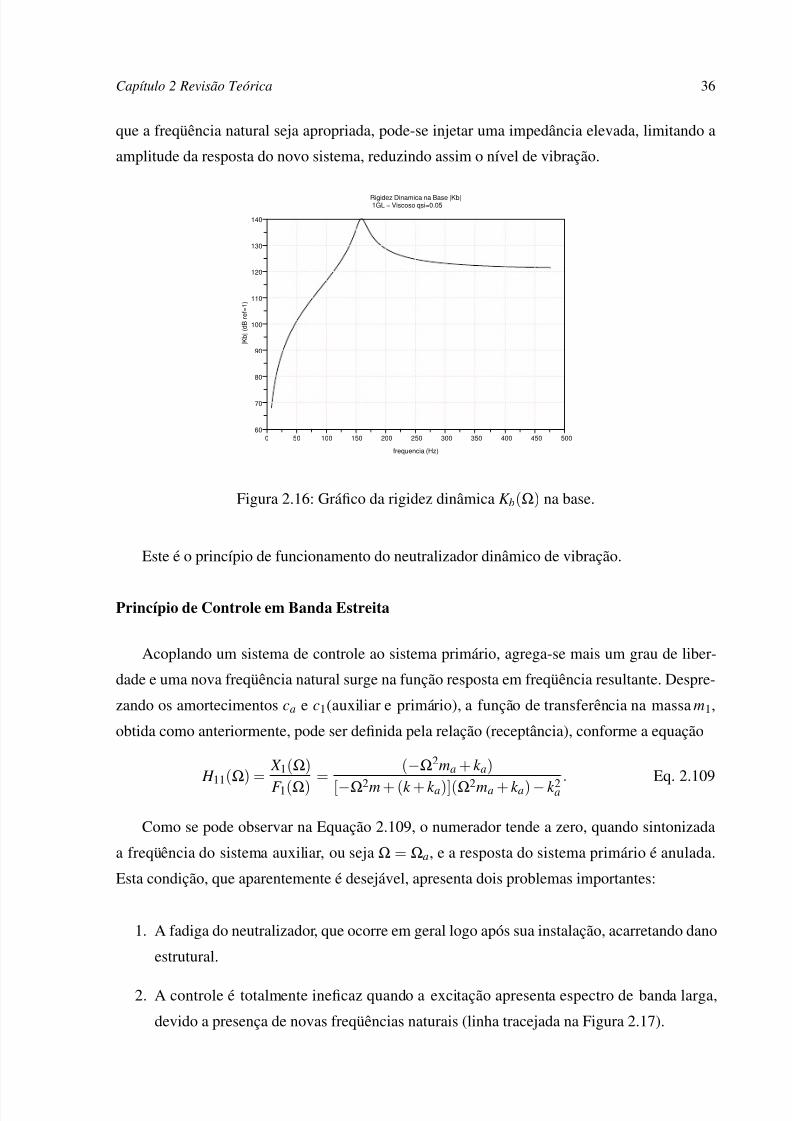
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 55/147
Capítulo 2 Revisão Teórica 36
que a freqüência natural seja apropriada, pode-se injetar uma impedância elevada, limitando a
amplitude da resposta do novo sistema, reduzindo assim o nível de vibração.
0 50 100 150 200 250 300 350 400 450 500
60
70
80
90
100
110
120
130
140
Rigidez Dinamica na Base |Kb|1GL − Viscoso qsi=0.05
frequencia (Hz)
| K b | ( d B r
e f = 1 )
Figura 2.16: Gráfico da rigidez dinâmica K b(Ω) na base.
Este é o princípio de funcionamento do neutralizador dinâmico de vibração.
Princípio de Controle em Banda Estreita
Acoplando um sistema de controle ao sistema primário, agrega-se mais um grau de liber-
dade e uma nova freqüência natural surge na função resposta em freqüência resultante. Despre-
zando os amortecimentos ca e c1(auxiliar e primário), a função de transferência na massa m1,
obtida como anteriormente, pode ser definida pela relação (receptância), conforme a equação
H 11
(Ω) =X 1(Ω)
F 1(Ω)=
(−Ω2ma + k a)
[−Ω2m + (k + k a)](Ω2ma + k a)− k 2a. Eq. 2.109
Como se pode observar na Equação 2.109, o numerador tende a zero, quando sintonizada
a freqüência do sistema auxiliar, ou seja Ω = Ωa, e a resposta do sistema primário é anulada.
Esta condição, que aparentemente é desejável, apresenta dois problemas importantes:
1. A fadiga do neutralizador, que ocorre em geral logo após sua instalação, acarretando dano
estrutural.
2. A controle é totalmente ineficaz quando a excitação apresenta espectro de banda larga,
devido a presença de novas freqüências naturais (linha tracejada na Figura 2.17).
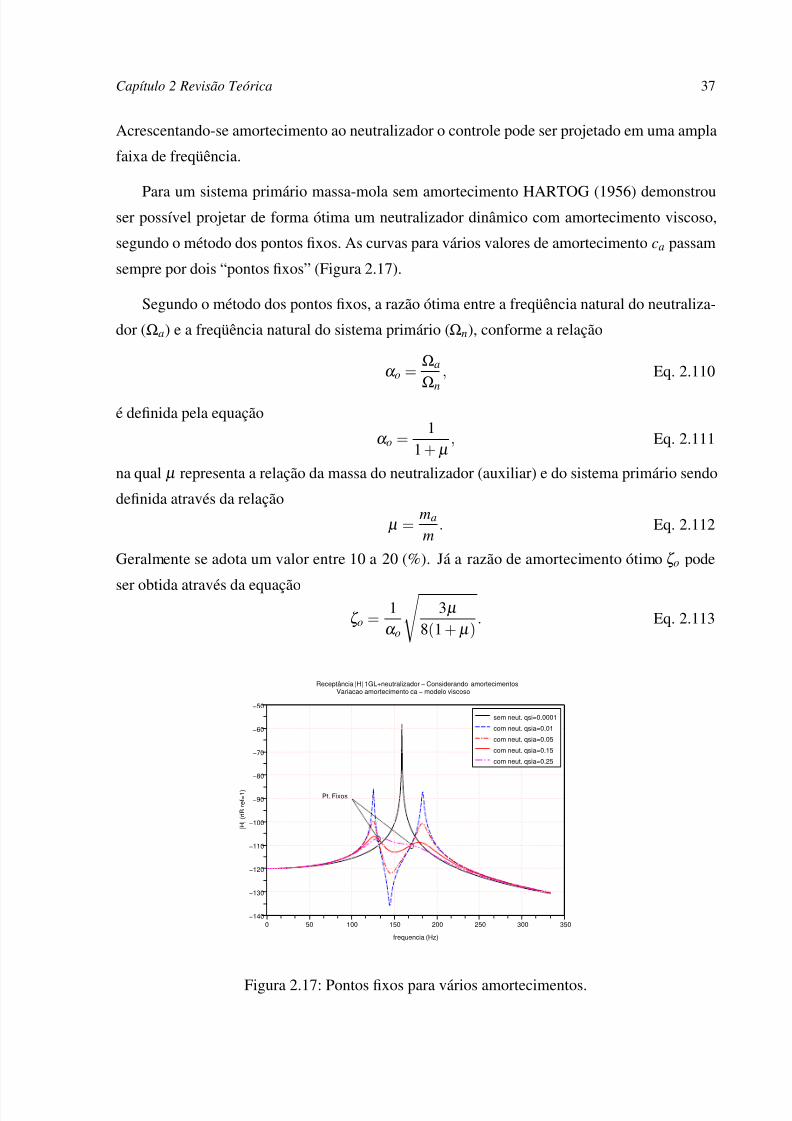
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 56/147
Capítulo 2 Revisão Teórica 37
Acrescentando-se amortecimento ao neutralizador o controle pode ser projetado em uma ampla
faixa de freqüência.
Para um sistema primário massa-mola sem amortecimento HARTOG (1956) demonstrouser possível projetar de forma ótima um neutralizador dinâmico com amortecimento viscoso,
segundo o método dos pontos fixos. As curvas para vários valores de amortecimento ca passam
sempre por dois “pontos fixos” (Figura 2.17).
Segundo o método dos pontos fixos, a razão ótima entre a freqüência natural do neutraliza-
dor (Ωa) e a freqüência natural do sistema primário (Ωn), conforme a relação
α o =Ωa
Ωn, Eq. 2.110
é definida pela equação
α o =1
1 +µ , Eq. 2.111
na qual µ representa a relação da massa do neutralizador (auxiliar) e do sistema primário sendo
definida através da relação
µ =ma
m. Eq. 2.112
Geralmente se adota um valor entre 10 a 20 (%). Já a razão de amortecimento ótimo ζ o pode
ser obtida através da equaçãoζ o =
1α o
3µ
8(1 +µ ). Eq. 2.113
Pt. Fixos
0 50 100 150 200 250 300 350
−140
−130
−120
−110
−100
−90
−80
−70
−60
−50
Receptância |H| 1GL+neutralizador − Considerando amortecimentosVariacao amortecimento ca − modelo viscoso
frequencia (Hz)
| H | ( d B r
e f = 1 )
sem neut. qsi=0.0001
com neut. qsia=0.01
com neut. qsia=0.05
com neut. qsia=0.15
com neut. qsia=0.25
Figura 2.17: Pontos fixos para vários amortecimentos.
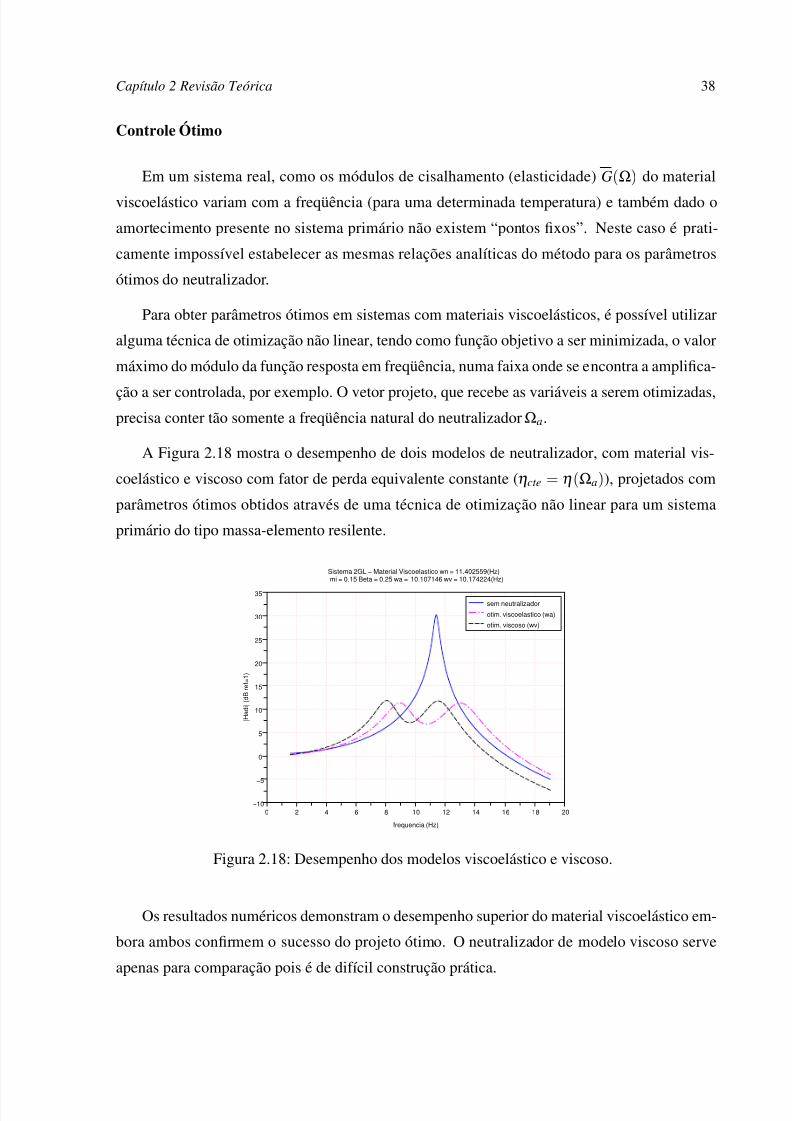
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 57/147
Capítulo 2 Revisão Teórica 38
Controle Ótimo
Em um sistema real, como os módulos de cisalhamento (elasticidade) G(Ω) do material
viscoelástico variam com a freqüência (para uma determinada temperatura) e também dado o
amortecimento presente no sistema primário não existem “pontos fixos”. Neste caso é prati-
camente impossível estabelecer as mesmas relações analíticas do método para os parâmetros
ótimos do neutralizador.
Para obter parâmetros ótimos em sistemas com materiais viscoelásticos, é possível utilizar
alguma técnica de otimização não linear, tendo como função objetivo a ser minimizada, o valor
máximo do módulo da função resposta em freqüência, numa faixa onde se encontra a amplifica-
ção a ser controlada, por exemplo. O vetor projeto, que recebe as variáveis a serem otimizadas,precisa conter tão somente a freqüência natural do neutralizador Ωa.
A Figura 2.18 mostra o desempenho de dois modelos de neutralizador, com material vis-
coelástico e viscoso com fator de perda equivalente constante (ηcte = η(Ωa)), projetados com
parâmetros ótimos obtidos através de uma técnica de otimização não linear para um sistema
primário do tipo massa-elemento resilente.
0 2 4 6 8 10 12 14 16 18 20
−10
−5
0
5
10
15
20
25
30
35
Sistema 2GL − Material Viscoelastico wn = 11.402559(Hz)mi = 0.15 Beta = 0.25 wa = 10.107146 wv = 10.174224(Hz)
frequencia (Hz)
| H a d i | ( d B r
e f = 1 )
sem neutralizador
otim. viscoelastico (wa)
otim. viscoso (wv)
Figura 2.18: Desempenho dos modelos viscoelástico e viscoso.
Os resultados numéricos demonstram o desempenho superior do material viscoelástico em-
bora ambos confirmem o sucesso do projeto ótimo. O neutralizador de modelo viscoso serve
apenas para comparação pois é de difícil construção prática.
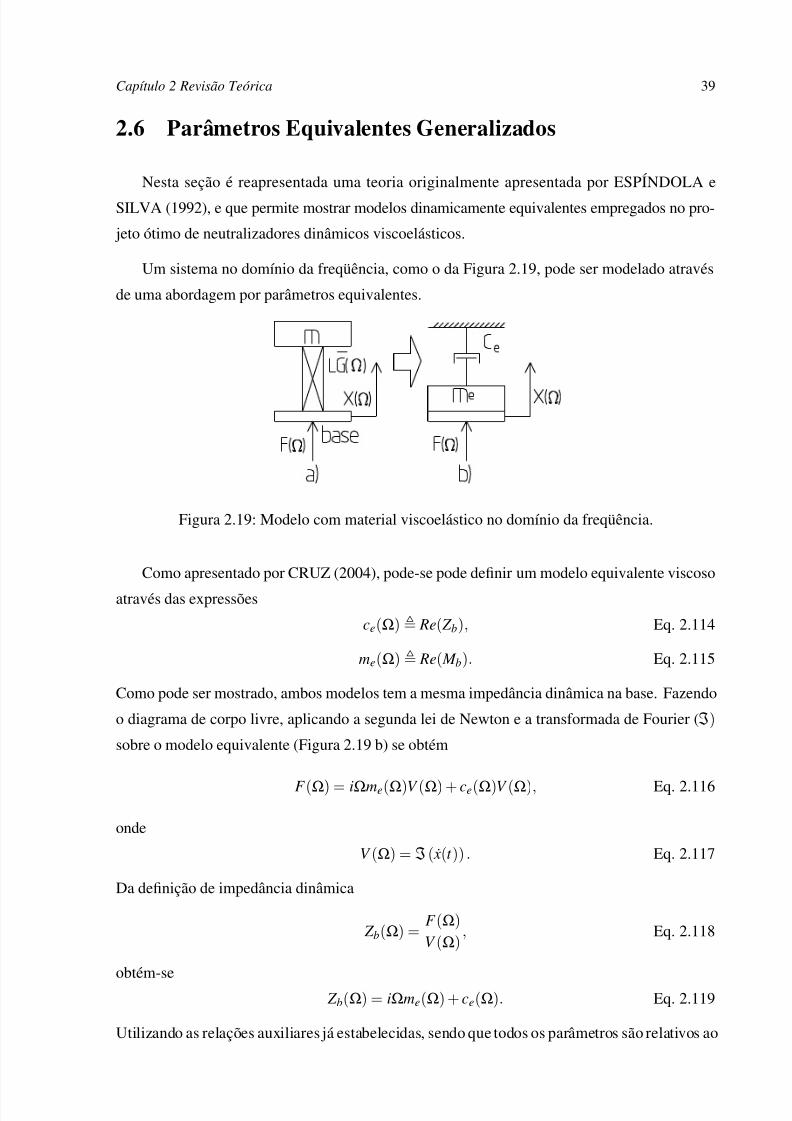
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 58/147
Capítulo 2 Revisão Teórica 39
2.6 Parâmetros Equivalentes Generalizados
Nesta seção é reapresentada uma teoria originalmente apresentada por ESPÍNDOLA e
SILVA (1992), e que permite mostrar modelos dinamicamente equivalentes empregados no pro-
jeto ótimo de neutralizadores dinâmicos viscoelásticos.
Um sistema no domínio da freqüência, como o da Figura 2.19, pode ser modelado através
de uma abordagem por parâmetros equivalentes.
Figura 2.19: Modelo com material viscoelástico no domínio da freqüência.
Como apresentado por CRUZ (2004), pode-se pode definir um modelo equivalente viscoso
através das expressões
ce(Ω) Re( Z b), Eq. 2.114
me(Ω) Re( M b). Eq. 2.115
Como pode ser mostrado, ambos modelos tem a mesma impedância dinâmica na base. Fazendo
o diagrama de corpo livre, aplicando a segunda lei de Newton e a transformada de Fourier (ℑ)
sobre o modelo equivalente (Figura 2.19 b) se obtém
F (Ω) = iΩme(Ω)V (Ω) + ce(Ω)V (Ω), Eq. 2.116
onde
V (Ω) = ℑ( ˙ x(t )) . Eq. 2.117
Da definição de impedância dinâmica
Z b(Ω) =F (Ω)
V (Ω), Eq. 2.118
obtém-se
Z b(Ω) = iΩme(Ω) + ce(Ω). Eq. 2.119
Utilizando as relações auxiliares já estabelecidas, sendo que todos os parâmetros são relativos ao
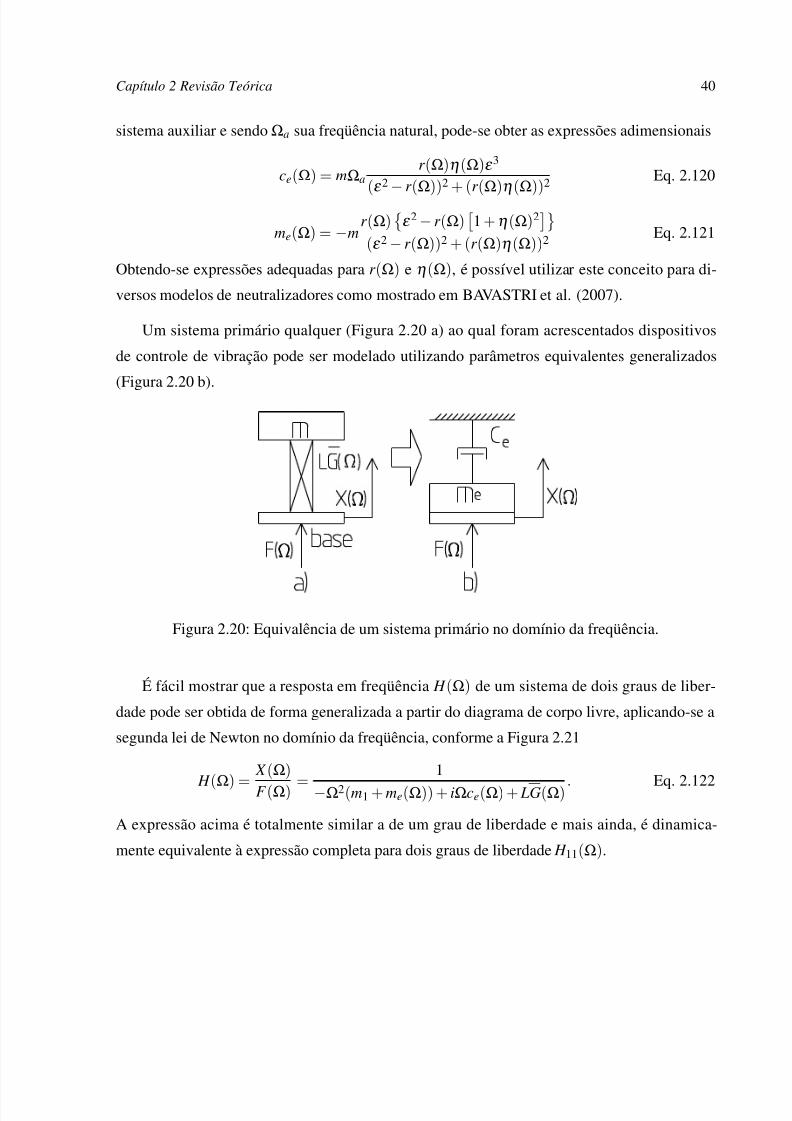
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 59/147
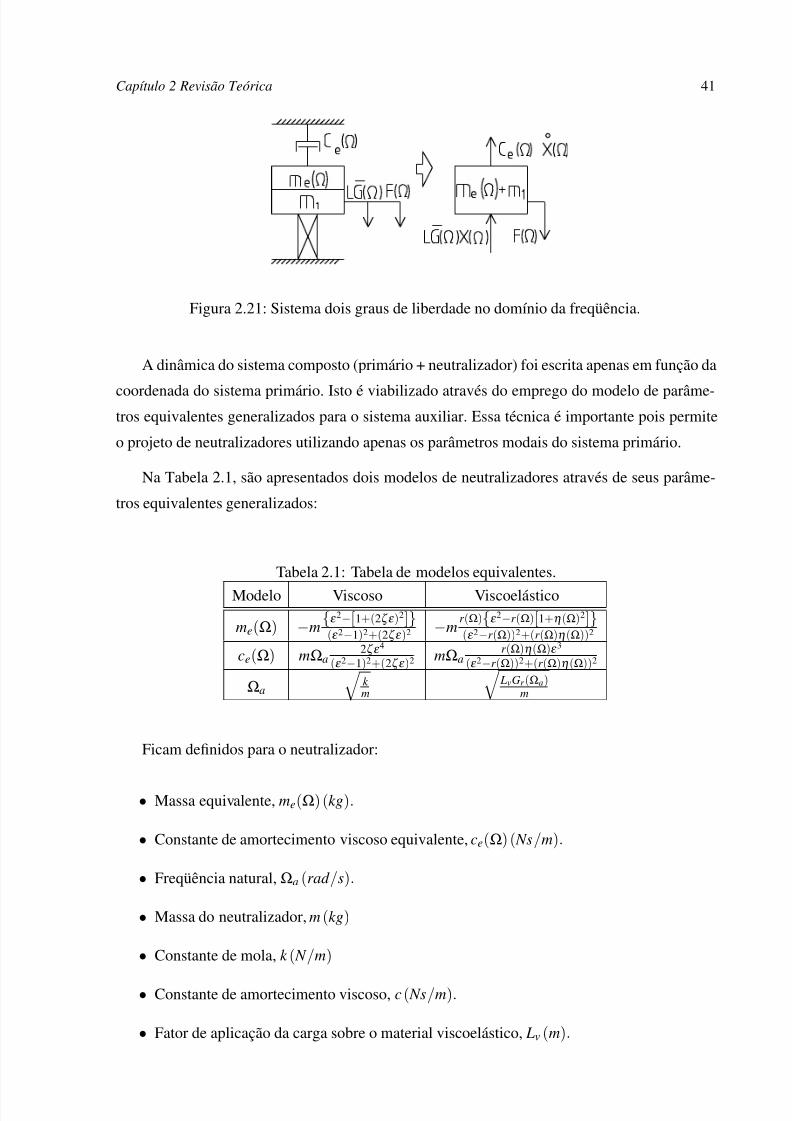
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 60/147
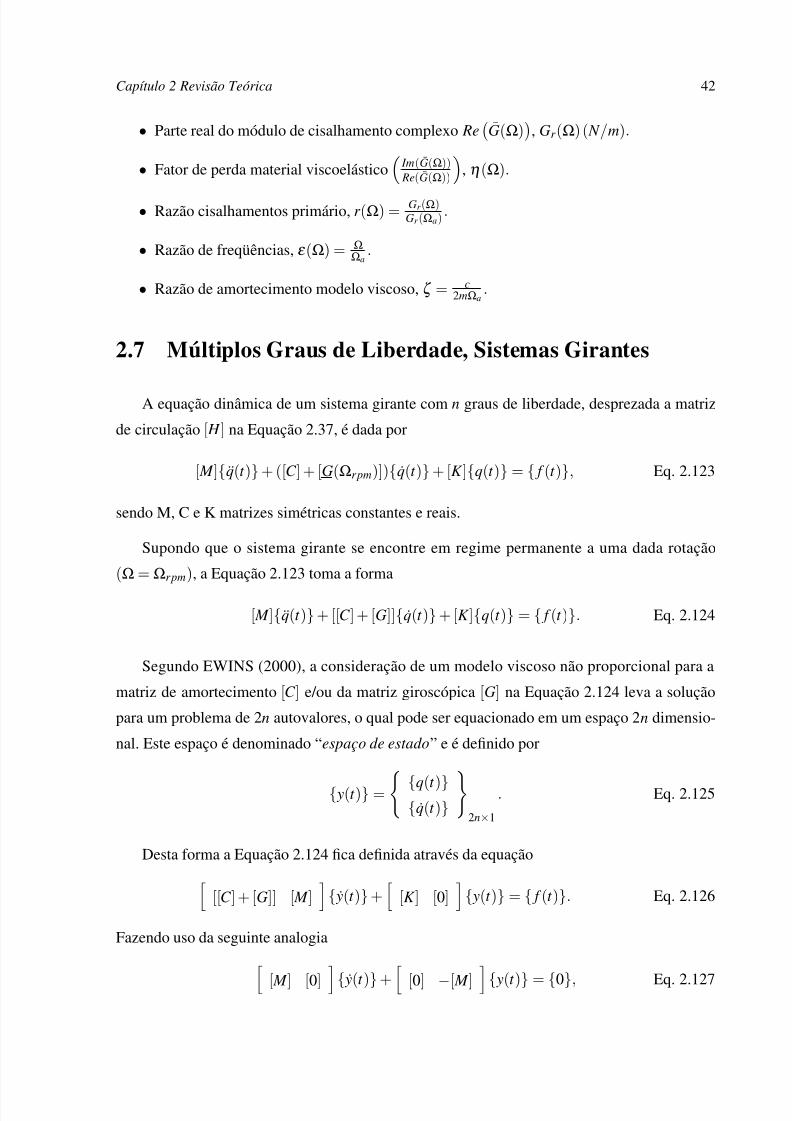
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 61/147
Capítulo 2 Revisão Teórica 42
• Parte real do módulo de cisalhamento complexo Re
G(Ω)
, Gr (Ω) ( N /m).
• Fator de perda material viscoelástico Im(G(Ω)) Re(G(Ω)), η(Ω).
• Razão cisalhamentos primário, r (Ω) = Gr (Ω)Gr (Ωa)
.
• Razão de freqüências, ε (Ω) = ΩΩa
.
• Razão de amortecimento modelo viscoso, ζ = c2mΩa
.
2.7 Múltiplos Graus de Liberdade, Sistemas Girantes
A equação dinâmica de um sistema girante com n graus de liberdade, desprezada a matriz
de circulação [ H ] na Equação 2.37, é dada por
[ M ]q(t ) + ([C ] + [G(Ωrpm)])q(t ) + [K ]q(t ) = f (t ), Eq. 2.123
sendo M, C e K matrizes simétricas constantes e reais.
Supondo que o sistema girante se encontre em regime permanente a uma dada rotação
(Ω =Ωrpm), a Equação 2.123 toma a forma
[ M ]q(t ) + [[C ] + [G]]q(t ) + [K ]q(t ) = f (t ). Eq. 2.124
Segundo EWINS (2000), a consideração de um modelo viscoso não proporcional para a
matriz de amortecimento [C ] e/ou da matriz giroscópica [G] na Equação 2.124 leva a solução
para um problema de 2n autovalores, o qual pode ser equacionado em um espaço 2n dimensio-
nal. Este espaço é denominado “espaço de estado” e é definido por
y(t ) = q(t )q(t )
2n×1
. Eq. 2.125
Desta forma a Equação 2.124 fica definida através da equação[[C ] + [G]] [ M ]
˙ y(t ) +
[K ] [0]
y(t ) = f (t ). Eq. 2.126
Fazendo uso da seguinte analogia
[ M ] [0]
˙ y(t ) +
[0] −[ M ] y(t ) = 0, Eq. 2.127
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 62/147
Capítulo 2 Revisão Teórica 43
é possível obter uma expressão com dimensão 2n×2n no espaço de estado
[C 1] [ M ]
[ M ] [0]
˙ y(t )
+ [K ] [0]
[0] −[ M ]
y(t )
= f (t )0 , Eq. 2.128
na qual [C 1] = ([C ] + [G]) constante para uma dada rotação. Simplificando o sistema de equa-
ções pode ser reescrito-escrito na seguinte forma:
[ A] ˙ y(t ) + [ B] y(t ) = N (t ), Eq. 2.129
na qual:
• [ A] = [C 1] [ M ]
[ M ] [0]
2n×2n
,
• [ B] =
[K ] [0]
[0] −[ M ]
2n×2n
,
• N (t ) =
f (t )0
2n×1
.
O sistema da Equação 2.129 está apto para ser colocado como um problema de autovalores
generalizado com j = 1, 2n, do tipo
[ B]θ j = λ j[ A]θ j, Eq. 2.130
permitindo a montagem do conjunto
[ B][θ ] = [λ ][ A][θ ], Eq. 2.131
sendo [λ ] a matriz diagonal de autovalores e [θ ] a matriz de autovetores do sistema no espaço deestado. Supondo que no espaço de configurações se proponha a solução livre q(t ) = φ est
e no espaço de estado y(t ) = θ est , sendo s uma variável complexa igual a −λ e define-se
para uma dada rotação
y(t ) =
q(t )q(t )
⇒ θ =
φ sφ
. Eq. 2.132
Como a matriz [ A] não é simétrica devido a presença de [G] em [C 1], é necessário resolver o
conjunto de problemas adjuntos de autovetores [ψ ]:
[ B]T [ψ ] = [λ ][ A]T [ψ ], Eq. 2.133

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 63/147
Capítulo 2 Revisão Teórica 44
onde:
ψ =
ϕ sϕ
Eq. 2.134
2.7.1 Ortonormalização
A ortonormalização dos autovetores à esquerda e à direita, para uma dada rotação, conforme
ESPÍNDOLA (1992), pode ser obtida dividindo cada j-ésima coluna pela raiz quadrada dos
elementos correspondentes da diagonal da matriza j
= [ψ ]T [ A][θ ],
√a j j, obtendo-se as
matrizes [Ψ] e [Θ]. Depois desta operação, ESPÍNDOLA (1992) demonstra que
[Ψ]T [ A][Θ] =1
= [ I ], Eq. 2.135
[Ψ]T [ B][Θ] =λ j
. Eq. 2.136
O produto da j-ésima linha (coluna transposta) de [Ψ], a matriz [ B] e a k-ésima coluna de
[Θ],considerando-se novamente s = −λ , é definido através da relação
ϕ sϕ
T
j
[K ] [0]
[0] −[ M ]
φ sφ
k
=
ϕ T j −λ jϕ T
[K ]φ k
λ k [ M ]φ k
,
Eq. 2.137ΨT
j [ B]Θk = ϕ T j [K ]φ k −λ jλ k ϕ T [ M ]φ k = b jδ jk , Eq. 2.138
com δ jk sendo definido pelo produto de Kronecker, ou seja δ i= j = 0 e δ i= j = 1.
O produto da j-ésima linha (coluna transposta) de [Ψ], a matriz [ A] e a k-ésima coluna de
[Θ], é dado pela expressão
ϕ sϕ
T
j
[C 1] [ M ]
[ M ] [0]
φ sφ
k
= ϕ T j −λ jϕ T
[C 1]φ k −λ k [ M ]φ k
[ M ]φ k
,
Eq. 2.139
ΨT j [ A]Θk = ϕ T
j [C 1]φ k −λ k ϕ T j [ M ]φ k −λ jϕ T
j [ M ]φ k = a jδ jk , Eq. 2.140
ΨT j [ A]Θk = −(λ j +λ k )ϕ T
j [ M ]φ k + ϕ T j [C 1]φ k = a jδ jk . Eq. 2.141
As características das matrizes [ A] e [ B] conduzem à solução de autovalores complexos em pares
conjugados do tipo λ = δ ± iν . Para j = k , mas aplicando λ k = λ ∗ j na Equação 2.141, obtém-se
a j = 0, e se pode escrever
−λ j +λ ∗ j
ϕ T j [ M ]φ k + ϕ T j [C 1]φ k = 0. Eq. 2.142
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 64/147
Capítulo 2 Revisão Teórica 45
Considerando-se as seguintes definições
ϕ T j [ M ]φ k m j Eq. 2.143
e
ϕ T j [C 1]φ k c1 j. Eq. 2.144
Substituindo a Equação 2.143 e a Equação 2.144 na Equação 2.142 obtém-se a relação
2δ j =c1 j
m j. Eq. 2.145
Para j = k , mas aplicando λ k = λ ∗ j na Equação 2.138 obtém-se b j = 0, logo
ϕ T j [K ]φ k −λ jλ ∗ j ϕ T [ M ]φ k = 0, Eq. 2.146
considerando a seguinte definição
ϕ T j [K ]φ k k j, Eq. 2.147
e substituindo as definições na Equação 2.146 obtém-se a expressão
δ 2 j +ν 2 j =k j
m j
=Ω2 j . Eq. 2.148
Definindo o fator de amortecimento ζ como usualmente
ζ j =c1 j
2m jΩ j, Eq. 2.149
e substituindo as definições (Equação 2.145) e (Equação 2.149) na Equação 2.148, aparece
naturalmente a expressão
λ j = ζ jΩ j + iΩ j 1−ζ 2 j . Eq. 2.150
A proposta de solução θ est , com s = −λ , leva a resposta temporal “livre” do sistema no
espaço de estado para
y(t ) =2n
∑ j=1
C jθ jes jt , Eq. 2.151
sendo C j uma constante arbitrária a ser determinada a partir das condições iniciais do sistema
y(t = 0).
Como mencionado anteriormente, os autovalores λ j = δ j + iν j são complexos, ocorrendo
aos pares conjugados. Ao aplicar a j-ésima condição inicial referente ao j-ésimo autovetor, aresposta livre do sistema terá a participação apenas de um modo, e a j-ésima resposta temporal
correspondente é composta de duas parcelas. Para obter uma resposta real (possível) no tempo,
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 65/147
Capítulo 2 Revisão Teórica 46
as duas parcelas devem ser: θ j2 = θ ∗ j1 (2.151):
(C j1θ jes jt +C j2θ
∗ j e∗s∗ jt ) = eδ jt (C j1θ je
iν jt +C j2θ ∗
j e−iν jt ), Eq. 2.152
mostra-se necessário para que resposta seja real que C j2 = C ∗ j1, logo
eδ jt (C jθ jeiν jt +C ∗ jθ
∗ j e−iν jt ) = eδ jt
(C jθ j +C ∗ jθ
∗ j ) cosν jt + i(C jθ j −C ∗ jθ
∗ j ) sinν jt
Eq. 2.153
e
eδ jt ( D j cosν jt + E j sinν jt ) = e−ζ jΩ jt ( D j cosΩ j
1−ζ 2 j t + E j sinΩ j
1−ζ 2 j t ), Eq. 2.154
com D j = (C jθ j +C ∗ jθ ∗
j ), E j = (C jθ j−
C ∗ jθ ∗
j ) números reais.
A senóide ( D j cosΩ jt + E j sinΩ jt ) é multiplicada pela envoltória exponencial e−ζ jΩ jt , cujo
sinal define a estabilidade do sistema. MEIROVITCH (1990) define a estabilidade de sistemas
lineares da seguinte forma:
1. A solução linearizada é estável se os autovalores s = −λ são não positivos, isto é, partes
reais nulas ou negativas.
2. A solução é assintoticamente estável se todos os autovalores s = −λ tem partes reaisnegativas.
3. A solução é instável se houver ao menos um autovalor s = −λ com parte real positiva.
A estabilidade na região acima da rotação crítica, como mostrado por CHILDS (1993), de-
pende do amortecimento introduzido no sistema e mostra que mecanismos de amortecimento
“interno” podem levar à instabilidade, enquanto que os introduzidos através dos mancais ten-
dem a aumentar a região de estabilidade do sistema. O projeto proposto leva amortecimento ao
sistema através de um mancal.
2.7.2 Diagrama de Campbell
Considerando que em um sistema girante seus elementos estão expostos ao efeito giroscó-
pico (8), as matrizes que dependem da velocidade (Ωrpm) tem de ser atualizadas para cada rota-
ção e o problema de autovalores deve resolvido novamente. Criando um gráfico das freqüências
características do sistema em função da rotação (Ω j ×Ωrpm) com Ω j representando as freqüên-cias naturais para uma rotação Ωrpm, obtém-se o diagrama de Campbell.
8Por hipótese, é desconsiderada a variação dos parâmetros dos mancais com a rotação.
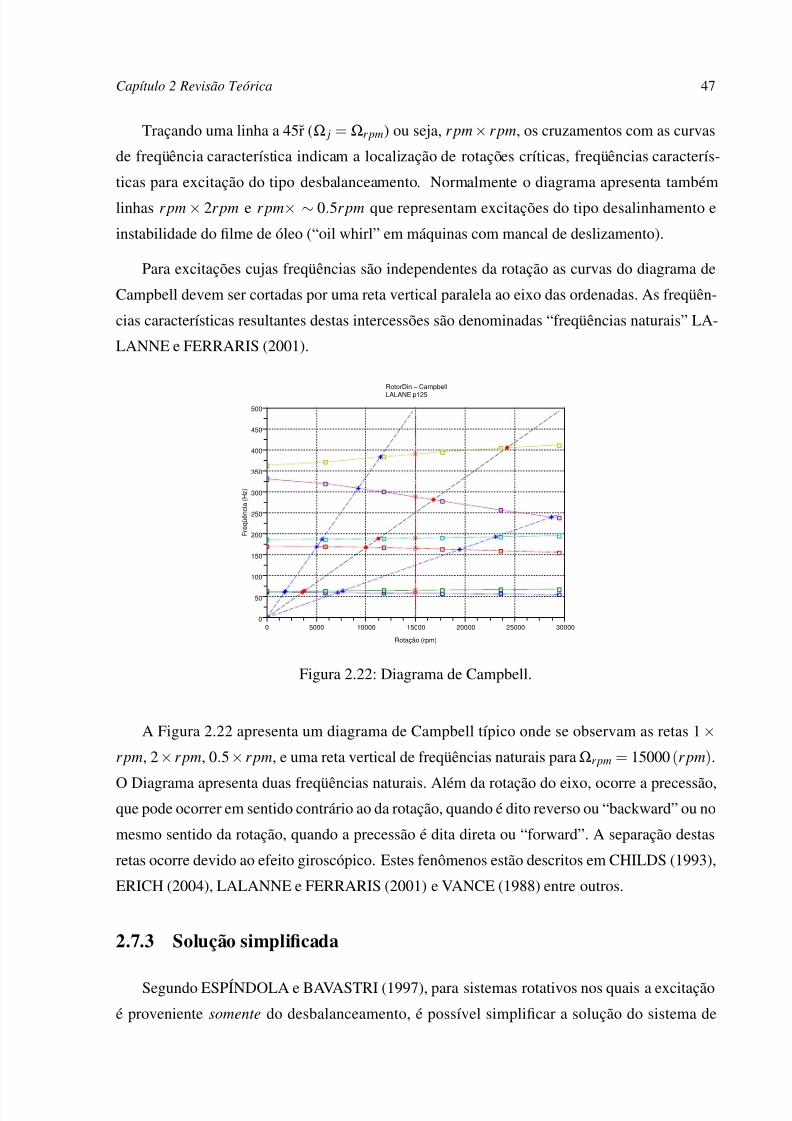
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 66/147
Capítulo 2 Revisão Teórica 47
Traçando uma linha a 45r (Ω j = Ωrpm) ou seja, rpm× rpm, os cruzamentos com as curvas
de freqüência característica indicam a localização de rotações críticas, freqüências caracterís-
ticas para excitação do tipo desbalanceamento. Normalmente o diagrama apresenta também
linhas rpm × 2rpm e rpm× ∼ 0.5rpm que representam excitações do tipo desalinhamento e
instabilidade do filme de óleo (“oil whirl” em máquinas com mancal de deslizamento).
Para excitações cujas freqüências são independentes da rotação as curvas do diagrama de
Campbell devem ser cortadas por uma reta vertical paralela ao eixo das ordenadas. As freqüên-
cias características resultantes destas intercessões são denominadas “freqüências naturais” LA-
LANNE e FERRARIS (2001).
0 5000 10000 15000 20000 25000 30000
0
50
100
150
200
250
300
350
400
450
500
RotorDin − Campbell
LALANE p125
Rotação (rpm)
F r e q ü ê n c i a ( H z )
Figura 2.22: Diagrama de Campbell.
A Figura 2.22 apresenta um diagrama de Campbell típico onde se observam as retas 1 ×rpm, 2×rpm, 0.5×rpm, e uma reta vertical de freqüências naturais para Ωrpm = 15000 (rpm).
O Diagrama apresenta duas freqüências naturais. Além da rotação do eixo, ocorre a precessão,que pode ocorrer em sentido contrário ao da rotação, quando é dito reverso ou “backward” ou no
mesmo sentido da rotação, quando a precessão é dita direta ou “forward”. A separação destas
retas ocorre devido ao efeito giroscópico. Estes fenômenos estão descritos em CHILDS (1993),
ERICH (2004), LALANNE e FERRARIS (2001) e VANCE (1988) entre outros.
2.7.3 Solução simplificada
Segundo ESPÍNDOLA e BAVASTRI (1997), para sistemas rotativos nos quais a excitação
é proveniente somente do desbalanceamento, é possível simplificar a solução do sistema de
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 67/147
Capítulo 2 Revisão Teórica 48
equações para achar diretamente as rotações críticas considerando apenas excitação de desba-
lanceamento (Equação 2.37). Neste caso Ωrpm = Ω então se pode escrever [G] = Ω[G1], já que
[G] neste caso, é função explícita de Ωrpm.
Na equação geral do movimento (Equação 2.37), considerando a excitação f (t ) somente
devido ao desbalanceamento, tem-se a relação
[ M ]q(t )+ (Ω[G1] + [C ])q(t ) + [K ]q(t ) = f (t ), Eq. 2.155
com [G1] representando a matriz giroscópica (Equação 2.43 e Equação 2.60) externando o pro-
duto pela rotação: [G] = Ω[G1].
A Equação 2.155 pode ser levada ao domínio da freqüência através da transformada deFourier, obtendo-se assim a expressão
−Ω2[ M ] + iΩ2[G1] + iΩ[C ] + [K ]Q(Ω) = F (Ω). Eq. 2.156
Considerando
y(t ) =
q(t )q(t )
Eq. 2.157
e substituindo a variável (Equação 2.157) na (Equação 2.155), obtém-se[Ω[G1] + [C ]] [ M ]
˙ y(t ) +
[K ] [0]
y(t ) = f (t ). Eq. 2.158
Os termos em Ω2podem ser agrupados convenientemente
−Ω2 [[ M ] − i[G1]] + iΩ[C ] + [K ]Q(Ω) = F (Ω). Eq. 2.159
Definindo a matriz [ ˆ M ] = [[ M ]− i[G1]] se obtém a equação
−Ω2
[ˆ
M ] + iΩ
[C ] + [K ]Q(
Ω) = F (
Ω). Eq. 2.160
Como já demonstrado em 2.7, a equação do movimento pode ser representada no espaço de
estado através da relação [C ] [ ˆ M ]
[ ˆ M ] [0]
˙ y(t ) +
[K ] [0]
[0] −[ ˆ M ]
y(t ) =
f (t )0
, Eq. 2.161
sendo definidas as matrizes:
• [ A] =
[C ] [ ˆ M ]
[ ˆ M ] [0]
.

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 68/147
Capítulo 2 Revisão Teórica 49
• [ B] =
[K ] [0]
[0] −[ ˆ M ]
.
• N (t ) =
f (t )0
.
O sistema matricial de equações diferenciais completo (Equação 2.161), pode ser reescrito de
forma compacta através da expressão
[ A] ˙ y(t ) + [ B] y(t ) = N (t ). Eq. 2.162
Utilizando as definições apresentadas na seção (2.7) o problema de autovalores generalizadopara n graus de liberdade e com j = 1, 2n fica definido através da relação
[ B]θ j = λ j[ A]θ j, Eq. 2.163
sendo o conjunto definido por
[ B][θ ] = [λ ][ A][θ ], Eq. 2.164
e o problema adjunto associado
[ B]T [ψ ] = [λ ][ A]T [ψ ]. Eq. 2.165
As matrizes ortonormalizadas [Θ] e [Ψ] e a matriz [λ ] complexas, que definem o sistema
primário rotativo são obtidas utilizando-se o software “RotorDin” (ver seção J.1).
Importante notar que assumindo Ωrpm = Ω foi possível, resolvendo apenas uma única vez
um problema de autovalores, representar o sistema primário através de um conjunto de parâ-
metros modais a serem utilizados no projeto ótimo de neutralizadores. Isto é importante porque
o projeto ótimo de neutralizadores dinâmicos viscoelásticos que é apresentado no capítulo 4,está relacionado com a excitação do tipo desbalanceamento. Portanto o modelo “simplificado”
é adequado para esta utilização, pois é preciso e computacionalmente leve.
2.7.4 Solução no Domínio da Freqüência
Partindo-se do sistema de equações diferenciais no espaço de estado (Equação 2.162), apli-
cando a transformada de Fourier se obtém
[iΩ[ A] + [ B]]Y (Ω) = N (Ω). Eq. 2.166
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 69/147
Capítulo 2 Revisão Teórica 50
Propondo a seguinte transformação de variáveis no domínio do tempo
y(t ) = [θ ] p(t ), Eq. 2.167
e a levando para o domínio da freqüência através da transformada de Fourier se obtém
Y (Ω) = [Θ]P(Ω). Eq. 2.168
Substituindo a transformação proposta (Equação 2.167) e pré-multiplicando pelos autovetores
[Ψ]T já ortonormalizados, obtém-se no espaço de estado
iΩ[Ψ]T [ A][Θ] + [Ψ]T [ B][Θ]
P(Ω) = [Ψ]T N (Ω) . Eq. 2.169
As matrizes abaixo, como mostrado anteriormente (em 2.7.1), são diagonais e se reduzem a:
• [Ψ]T [ A][Θ] = [1] = [ I ].
• [Ψ]T [ B][Θ] =λ j
.
Aplicando as relações acima em (2.169), obtém-se
[ D(Ω)]P(Ω) = [Ψ]T N (Ω) , Eq. 2.170
com
[ D(Ω)] =iΩ[ I ] +
λ j
, Eq. 2.171
assim, a resposta no espaço modal do espaço de estado resulta
P(Ω) = [ D(Ω)]−1[Ψ]T N (Ω)
Como pode ser constatado a matriz [ D(Ω)] é diagonal, portanto, facilmente invertida. Cadaelemento da diagonal de [ D(Ω)]−1 é obtido através da inversão simples do elemento da diagonal
de [ D(Ω)].
[ D(Ω)]−1 =
(
1iΩ+λ j
)
. Eq. 2.172
* Caso a matriz [ D(Ω)] seja uma matriz mal condicionada (9) sua inversão pode ser obtida
através de algoritmos de pseudo-inversão, como mostrado por BAZáN e BAVASTRI (1996).
9Uma avaliação do condicionamento da matriz [ A] pode ser o valor da relação cond ( A) = A A−1
, se
cond ( A) 1, a matriz [ A] é dita mal condicionada.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 70/147
Capítulo 2 Revisão Teórica 51
Da transformação de variáveis (Equação 2.167 ) e de estado (Equação 2.157), tem-se
Q(Ω)
iΩQ(Ω) = [Θ][ D(Ω)]−1[Ψ]T F (Ω)
0 . Eq. 2.173
Por definição (Equação 2.100), a função de transferência é a relação entre deslocamento e força
generalizados (saída / entrada), assim
[α (Ω)]
[Θ][ D(Ω)]−1[Ψ]T . Eq. 2.174
A matriz complexa [α (Ω)] (Equação 2.174), é denominada matriz de receptância no espaço
de estado. Observando a forma da Equação 2.173, deduz-se pelas ordens das matrizes que
[α (Ω)] tem a forma
[α (Ω)] =
[α 11(Ω)] [α 12(Ω)]
[α 21(Ω)] [α 22(Ω)]
. Eq. 2.175
Logo, a relação entre deslocamento e excitação, que define a matriz de receptância no espaço
de configuração é
Q(Ω) = [α 11(Ω)]F (Ω). Eq. 2.176
Para se obter uma função resposta em freqüência, utiliza-se a relação
α ks(Ω) =
2n
∑
j = 1
Θk jΨs j
iΩ+λ j. Eq. 2.177
Com s representando o ponto de excitação, k o ponto de medição, e n o número de modos.
O sistema que precisa ser resolvido é dado pela Equação 2.173, sendo que o vetor F (Ω)atualizado para cada rotação, é composto pela força (Equação 2.74) aplicada às coordenadas ge-
neralizadas correspondentes à localização da seção onde a excitação do tipo desbalanceamentoé aplicada.
A solução da Equação 2.176 leva à solução no domínio da freqüência da resposta Q(Ω)como amplitude da resposta ao desbalanceamento.
Para efeito de comparação, são apresentadas figuras de resposta. A Figura 2.23 apresenta o
gráfico de resposta ao desbalanceamento obtida através do software RotorDin para a geometria
e demais condições do sistema, apresentada em LALANNE e FERRARIS (2001)(p.125). A
Figura 2.24 apresenta a resposta obtida pelo autor citado.
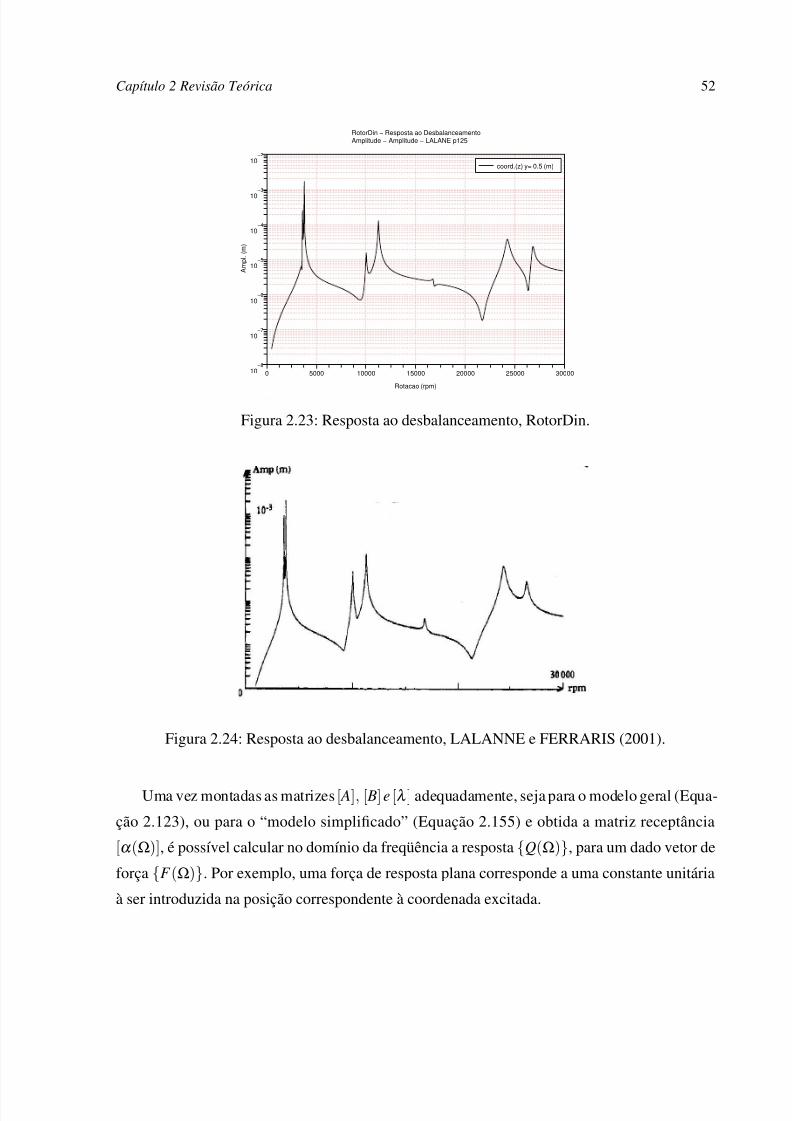
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 71/147
Capítulo 2 Revisão Teórica 52
0 5000 10000 15000 20000 25000 30000
−8
10
−7
10
−6
10
−5
10
−4
10
−3
10
−2
10
RotorDin − Resposta ao Desbalanceamento
Amplitude − Amplitude − LALANE p125
Rotacao (rpm)
A m p l . ( m )
coord.(z) y= 0.5 (m)
Figura 2.23: Resposta ao desbalanceamento, RotorDin.
Figura 2.24: Resposta ao desbalanceamento, LALANNE e FERRARIS (2001).
Uma vez montadas as matrizes [ A], [ B] e [λ ] adequadamente, seja para o modelo geral (Equa-
ção 2.123), ou para o “modelo simplificado” (Equação 2.155) e obtida a matriz receptância
[α (Ω)], é possível calcular no domínio da freqüência a resposta Q(Ω), para um dado vetor de
força F (Ω). Por exemplo, uma força de resposta plana corresponde a uma constante unitária
à ser introduzida na posição correspondente à coordenada excitada.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 72/147
53
3 MODELO DO SISTEMA COMPOSTO
Neste capítulo é apresentada a equação do movimento do sistema composto, rotor mais
neutralizadores dinâmicos viscoelásticos. Uma vez definidas estas equações, é utilizada uma
formulação equivalente à utilizada no trabalho desenvolvido por BAVASTRI (1997)(cap. IV)
para o projeto ótimo de neutralizadores viscoelásticos.
São acrescentados fisicamente ao sistema primário p neutralizadores, fixados sobre ummancal flexível propriamente projetado para este fim. Os dispositivos de controle atuarão so-
mente em deslocamento, nas coordenadas X eZ , desprezando por hipótese os possíveis efeitos
nos graus de liberdade de rotação.
Nas coordenadas da seção correspondente do sistema à aplicação do neutralizador, agregam-
se as p massas e amortecimentos equivalentes generalizados, utilizando os modelos da Equação
2.121 e Equação 2.120, com massas me(Ω) e amortecimentos ce(Ω) respectivamente. As ma-
trizes de massa e amortecimento equivalentes resultantes, [ M e] e [C e] assim obtidas, contémelementos somente nas coordenadas generalizadas de deslocamento. Por hipótese, eventuais
momentos são também desprezados. Este tipo de acréscimo somente é possível porque o mo-
delo equivalente não acrescenta grau extra de liberdade, como mostrado na seção (2.6).
Também são apresentados resultados obtidos através de uma versão especialmente modifi-
cada do software RotorDin, na qual são introduzidos os parâmetros equivalentes generalizados
diretamente nas matrizes de massa e amortecimento do modelo do eixo, no ponto de fixação
dos neutralizadores, com o objetivo de comparar os resultados com aqueles obtidos no software
de projeto.
3.1 Implementação
Para determinar a resposta do sistema composto, monta-se novamente o sistema de equa-
ções utilizando as variáveis de estado como definidas na Equação 2.157. Propondo uma solução
no domínio da freqüência do tipo
Y (Ω) = [Θ]P(Ω), Eq. 3.1
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 73/147
Capítulo 3 Modelo do Sistema Composto 54
a equação de movimento no espaço modal do espaço de estado do sistema primário é facilmente
montada e calculada graças a utilização dos parâmetros equivalentes generalizados. Matemati-
camente, a equação do sistema composto fica definida pela relação
iΩ[Ψ]T [ ¯ A][Θ] + [Ψ]T [ ¯ B][Θ]
P(Ω) = [Ψ]T N (Ω) . Eq. 3.2
Supondo que o sistema primário “sem neutralizadores” seja definido pela equação
iΩ[Ψ]T [ A][Θ] + [Ψ]T [ B][Θ]
P(Ω) = [Ψ]T N (Ω) . Eq. 3.3
Por definição, tem-se que
[ ¯ A] = [ A] + [ ˜ A], Eq. 3.4
[ ¯ B] = [ B] + [ ˜ B] Eq. 3.5
com:
[ A] =
[C ] [ ˆ M ]
[ ˆ M ] [0]
, Eq. 3.6
[ ˜ A]
[C eq(Ω)] [ M eq(Ω)]
[ M eq(Ω)] [0]
, Eq. 3.7
e[ B] =
[K ] [0]
[0] −[ ˆ M ]
, Eq. 3.8
[ ˜ B]
[0] [0]
[0] −[ M eq(Ω)]
. Eq. 3.9
Assim, substituindo Equação 3.6 e Equação 3.7 na Equação 3.8 e também a Equação 3.9 e
Equação 3.4 na Equação 3.5, obtém-se a seguinte relação
iΩ[Ψ]T [ ¯ A][Θ] + [Ψ]T [ ¯ B][Θ]
=iΩ
[ I ] + [Ψ]T [ ˜ A][Θ]
+λ j
+ [Ψ]T [ ˜ B][Θ]
. Eq. 3.10
Para um sistema com grande número de graus de liberdade é conveniente truncar as matri-
zes modais [Ψ] e [Θ] para um número de autovetores 2n que represente o sistema na faixa de
freqüências de interesse.
[Ψ] = [Ψ]2n×2n Eq. 3.11
e
[ˆΘ] = [Θ]2n×2n Eq. 3.12

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 74/147
Capítulo 3 Modelo do Sistema Composto 55
Os autovetores truncados formam um sub-espaço modal a ser utilizado para determinar uma
solução aproximada do sistema composto. O novo sistema, agora truncado para os 2n primeiros
autovetores, no sub-espaço modal do espaço de estado, fica
[ ˆ D]P(Ω) = [Ψ]T N (Ω) , Eq. 3.13
com
[ ˆ D]2n×2n =
iΩ
[ ˆ I ] + [Ψ]T [ ˜ A][Θ]
+
ˆλ j
+ [Ψ]T [ ˜ B][Θ]
. Eq. 3.14
A resposta no espaço modal do espaço de estado é definida através da equação
P(Ω)
2n
×1 = [ ˆ D(Ω)]−1
2n×
2n[Ψ]T 2n
×2n
F (Ω)
0 2n×1
, Eq. 3.15
denominado-se P j(Ω) a j-ésima coordenada principal generalizada.
Partindo da definição de variável de estado (Equação 2.157) e da transformação de variáveis
(Equação 3.1), obtém-se a relaçãoQ(Ω)
iΩQ(Ω)
2n×1
=
[Θ][ ˇ D(Ω)][Ψ]T 2n×2n
F (Ω)
0
2n×1
, Eq. 3.16
com [ ˇ D(Ω)] = [ ˆ D(Ω)]−1. Desenvolvendo o produto, já que [ ˇ D(Ω)] não é diagonal obtém-se
α ks(Ω) =
2n
∑
i = 1
2n
∑
j = 1
ˇ Di j(Ω)ΘkiΨs j. Eq. 3.17
Note-se que a resposta não é completa, já que se trata de um sub-espaço modal de estado 2n.
3.2 Resposta em FreqüênciaÉ possível obter a resposta do sistema para rotação nula Ω = 0, ou para qualquer outra
rotação constante, obtendo-se os parâmetros modais Ψ, Θeλ correspondentes, a partir do “caso
geral” (ver seção 2.7) diagrama de Campbell completo. Na Figura 2.22 a partir de uma reta
paralela ao eixo das ordenadas na rotação desejada Ωrpm = cte.
A função resposta em freqüência no espaço de estado é obtida diretamente através da Equa-
ção 2.173 ou Equação 2.177 para o sistema primário, e da Equação 3.16 ou Equação 3.17 para
o sistema composto.
Esta implementação permite comparar as respostas numéricas obtidas com as medidas atra-
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 75/147
Capítulo 3 Modelo do Sistema Composto 56
vés do teste de resposta (“bump test”) com martelo instrumentado (ver seção 5.1).
3.3 Inclusão dos Neutralizadores Diretamente no Modelo doEixo
Utilizando a versão modificada do software RotorDin é possível entrar com os caracterís-
ticas dinâmicas do material viscoelástico, a massa dos neutralizadores e suas coordenadas de
aplicação.
Como foi visto na descrição do modelo do sistema girante (seção 2.7), as matrizes globais
de massa rigidez e amortecimento são montadas e a partir destes, com a equação de movimento,as características dinâmicas do rotor podem ser obtidas (diagrama de Campbell, resposta ao
desbalanceamento entre outras).
Através dos parâmetros equivalentes generalizados, é possível modificar diretamente as
matrizes de massa e amortecimento, introduzindo o modelo de parâmetro equivalente nas coor-
denadas generalizadas correspondentes à fixação dos neutralizadores.
Através da utilização dos parâmetros equivalentes generalizados não é acrescentado ne-
nhum novo grau de liberdade, então, para cada freqüência Ω ao qual o sistema está sujeito, nocaso em que Ωrpm = Ω, é necessário o cálculo da massa me(Ω) e do amortecimento equivalen-
tes ce(Ω). Estas grandezas devem ser somadas na posição correta às matrizes globais de massa
[ M ] e amortecimento [C ] do sistema girante primário.
[ ˜ M (Ω)] = [ M ] +
0 0 ... 0 0
.... . . ... ... ...
0 ... me1(Ω) 0 0
... ... ... ... ...0 0 ... me2(Ω) 0
... ... .... . . ...
0 0 ... 0 0
= [ M ] + [ M e(Ω)] Eq. 3.18
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 76/147
Capítulo 3 Modelo do Sistema Composto 57
e
[C (Ω)] = [C ] +
0 0 ... 0 0
.... . . ... ... ...
0 ... ce1(Ω) 0 0
... ... ... ... ...
0 0 ... ce2(Ω) 0
... ... .... . . ...
0 0 ... 0 0
= [C ] + [C e(Ω)]. Eq. 3.19
Todo o sistema deve ser resolvido novamente para cada Ω (freqüência), utilizando porém,
as novas matrizes [ ˜ M (Ω)] e [C (Ω)] aplicadas à Equação 2.123.
3.3.1 Diagrama de Campbell
O diagrama de Campbell utilizando as novas matrizes de massa [ ˜ M (Ω)] e amortecimento
[C (Ω)] necessita ser obtido de maneira ligeiramente diferente da apresentada anteriormente
pelo fato de se ter dois sistemas cujos parâmetros variam. O sistema girante que depende da
rotação Ω=Ωrpm e as propriedades do material viscoelástico que dependem da freqüência Ω e
da temperatura T (considerada constante neste trabalho).
Para uma rotação qualquer constante Ωrpm, é resolvido em uma faixa de freqüência apro-
priada ao número rotações características que se deseja analisar, uma seqüência de problemas
de autovalor montados com as matrizes (Equação 3.18) e (Equação 3.19) na equação geral
(Equação 2.123), isto é necessário devido a presença do material viscoelástico cujas caracte-
rísticas dependem da freqüência Ω. Através deste conjunto de soluções (freqüências naturais),
é montado um diagrama de Campbell dito interno, ou seja, válido somente para rotação atual
Ωrpm.
Os pontos de intercessão das curvas de freqüência natural com uma linha de inclinação uni-
tária (Ω j =Ω) são consideradas freqüências naturais do sistema composto para a dada rotação.
Depois de percorrida a faixa de rotação desejada, obtém-de o diagrama de Campbell propri-
amente dito, de maneira similar ao apresentado por FERREIRA (2005). Esta metodologia é
extremamente custosa em termos computacionais.
Para se conseguir uma boa precisão na obtenção do Campbell interno é necessário diminuir
o passo de freqüência na região de influência do neutralizador, onde cálculo dos pontos de
intercessão é mais sensível. A região considerada foi de −40% a +20% em torno da freqüência
natural do neutralizador.
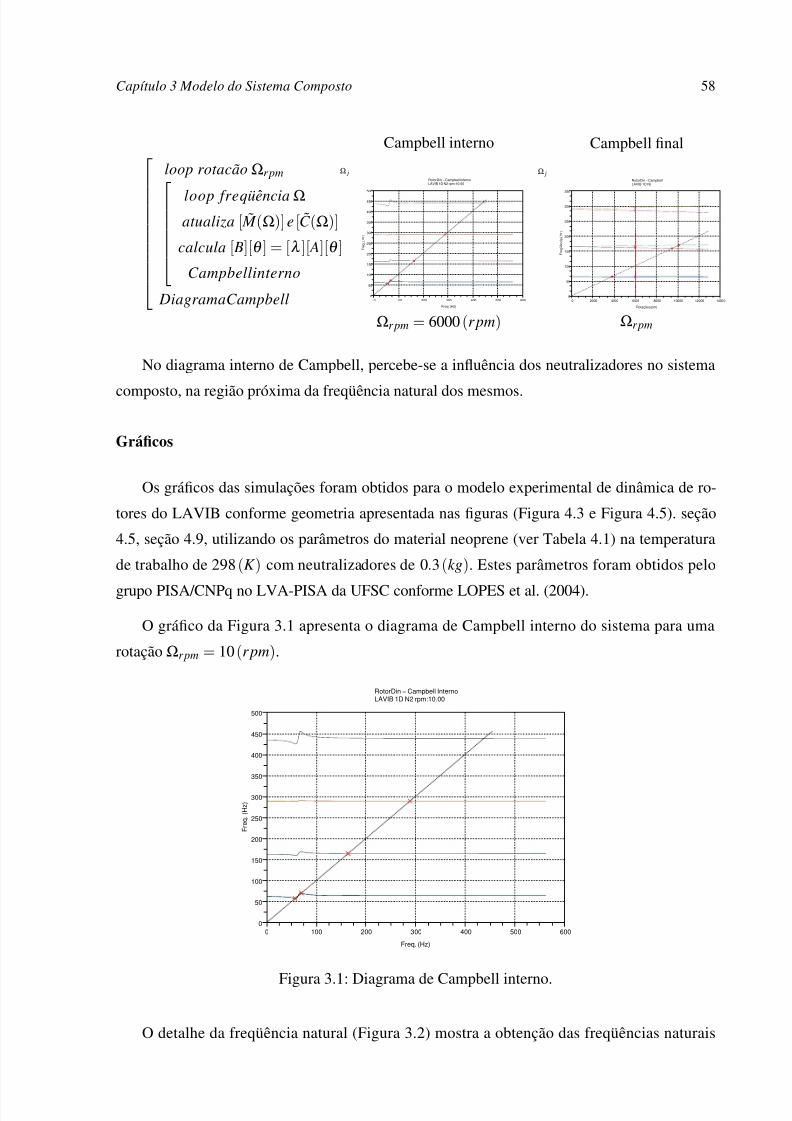
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 77/147
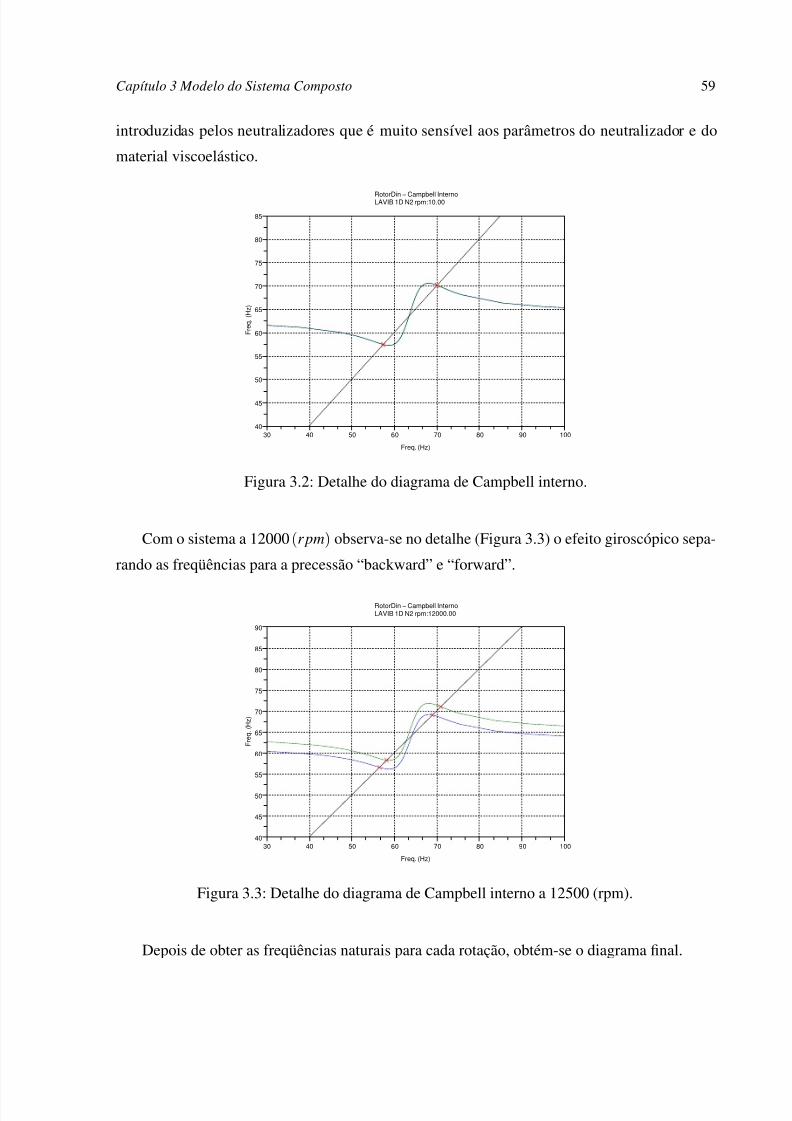
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 78/147
Capítulo 3 Modelo do Sistema Composto 59
introduzidas pelos neutralizadores que é muito sensível aos parâmetros do neutralizador e do
material viscoelástico.
30 40 50 60 70 80 90 100
40
45
50
55
60
65
70
75
80
85
RotorDin − Campbell InternoLAVIB 1D N2 rpm:10.00
Freq. (Hz)
F r e q .
( H z )
Figura 3.2: Detalhe do diagrama de Campbell interno.
Com o sistema a 12000 (rpm) observa-se no detalhe (Figura 3.3) o efeito giroscópico sepa-
rando as freqüências para a precessão “backward” e “forward”.
30 40 50 60 70 80 90 100
40
45
50
55
60
65
70
75
80
85
90
RotorDin − Campbell InternoLAVIB 1D N2 rpm:12000.00
Freq. (Hz)
F r e q .
( H z )
Figura 3.3: Detalhe do diagrama de Campbell interno a 12500 (rpm).
Depois de obter as freqüências naturais para cada rotação, obtém-se o diagrama final.
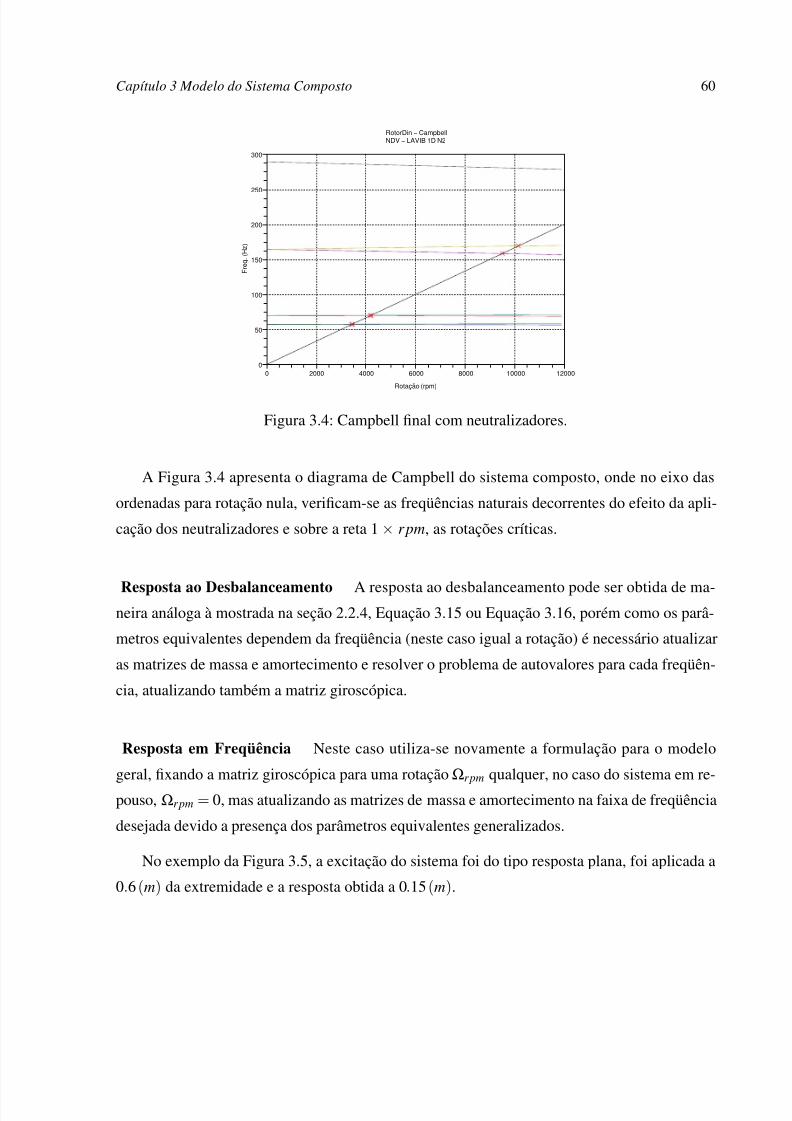
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 79/147
Capítulo 3 Modelo do Sistema Composto 60
0 2000 4000 6000 8000 10000 12000
0
50
100
150
200
250
300
RotorDin − CampbellNDV − LAVIB 1D N2
Rotação (rpm)
F r e q .
( H z )
Figura 3.4: Campbell final com neutralizadores.
A Figura 3.4 apresenta o diagrama de Campbell do sistema composto, onde no eixo das
ordenadas para rotação nula, verificam-se as freqüências naturais decorrentes do efeito da apli-
cação dos neutralizadores e sobre a reta 1 × rpm, as rotações críticas.
Resposta ao Desbalanceamento A resposta ao desbalanceamento pode ser obtida de ma-neira análoga à mostrada na seção 2.2.4, Equação 3.15 ou Equação 3.16, porém como os parâ-
metros equivalentes dependem da freqüência (neste caso igual a rotação) é necessário atualizar
as matrizes de massa e amortecimento e resolver o problema de autovalores para cada freqüên-
cia, atualizando também a matriz giroscópica.
Resposta em Freqüência Neste caso utiliza-se novamente a formulação para o modelo
geral, fixando a matriz giroscópica para uma rotação Ωrpm qualquer, no caso do sistema em re-
pouso, Ωrpm = 0, mas atualizando as matrizes de massa e amortecimento na faixa de freqüência
desejada devido a presença dos parâmetros equivalentes generalizados.
No exemplo da Figura 3.5, a excitação do sistema foi do tipo resposta plana, foi aplicada a
0.6 (m) da extremidade e a resposta obtida a 0.15(m).
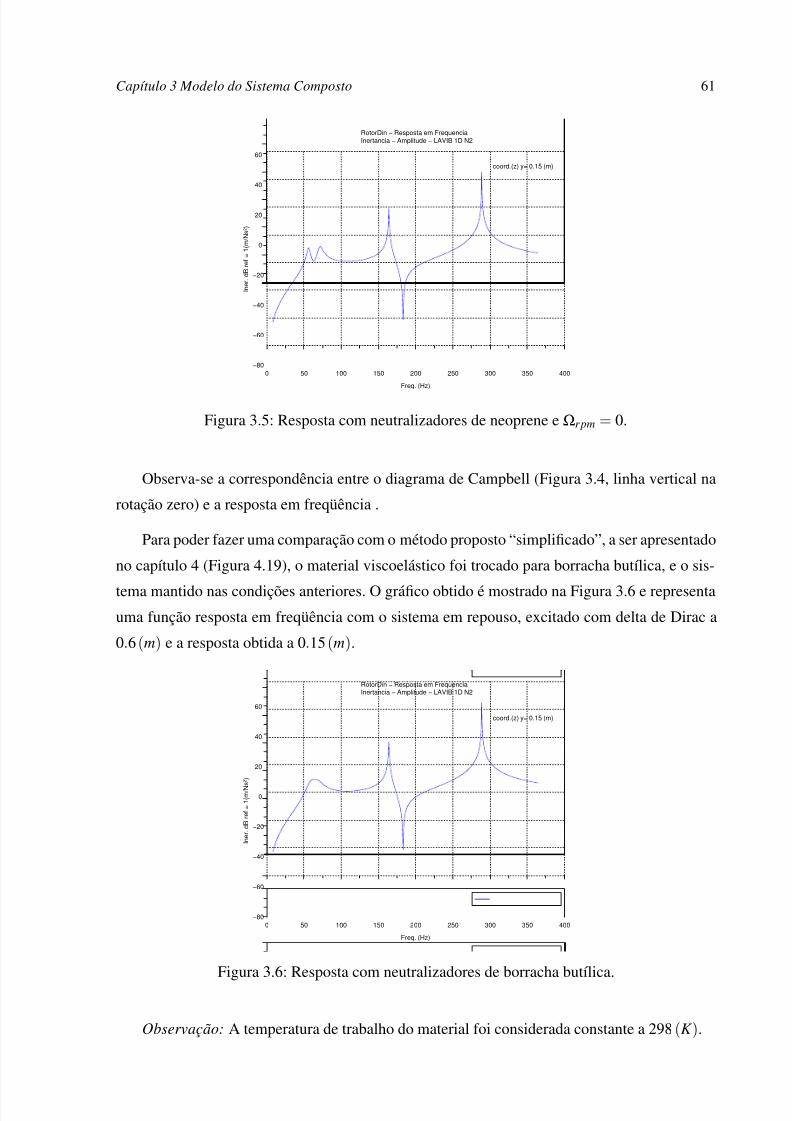
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 80/147
Capítulo 3 Modelo do Sistema Composto 61
0 50 100 150 200 250 300 350 400
−80
−60
−40
−20
0
20
40
60
RotorDin − Resposta em Frequencia
Inertancia − Amplitude − LAVIB 1D N2
Freq. (Hz)
I n e r . d B r e f = 1 ( m / N s ² )
coord.(z) y= 0.15 (m)
Figura 3.5: Resposta com neutralizadores de neoprene e Ωrpm = 0.
Observa-se a correspondência entre o diagrama de Campbell (Figura 3.4, linha vertical na
rotação zero) e a resposta em freqüência .
Para poder fazer uma comparação com o método proposto “simplificado”, a ser apresentado
no capítulo 4 (Figura 4.19), o material viscoelástico foi trocado para borracha butílica, e o sis-
tema mantido nas condições anteriores. O gráfico obtido é mostrado na Figura 3.6 e representauma função resposta em freqüência com o sistema em repouso, excitado com delta de Dirac a
0.6 (m) e a resposta obtida a 0.15(m).
0 50 100 150 200 250 300 350 400
−80
−60
−40
−20
0
20
40
60
RotorDin − Resposta em FrequenciaInertancia − Amplitude − LAVIB 1D N2
Freq. (Hz)
I n e r . d B r e f = 1 ( m / N s ² )
coord.(z) y= 0.15 (m)
Figura 3.6: Resposta com neutralizadores de borracha butílica.
Observação: A temperatura de trabalho do material foi considerada constante a 298 (K ).
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 81/147
62
4 PROJETO DO NEUTRALIZADOR PARA DESBALANCEAMENTO
Neste capítulo são definidas:
• A massa dos neutralizadores.
•Uma função objetivo para o projeto ótimo de tais dispositivos de controle.
• Através da formulação proposta é apresentada uma implementação de um código numé-
rico para o projeto ótimo de neutralizadores viscoelásticos aplicados a sistemas rotativos.
• São apresentados os resultados de algumas simulações numéricas realizadas sobre um
modelo da bancada de dinâmica de rotores do LAVIB.
• A partir das freqüências ótimas obtidas é mostrado um projeto de construção de neutrali-
zadores para controle da primeira rotação crítica do rotor da bancada.
Neste projeto são empregados os parâmetros modais obtidos através do software RotorDin para
o modelo “simplificado”, ou seja, considerando apenas excitação do tipo desbalanceamento.
4.1 Massa do Neutralizador
Como mostrado por BAVASTRI (1997) (ver seção A.1.1), por semelhança às expressões
obtidas para o modelo de um grau de liberdade é possível calcular a massa ótima do neutraliza-dor de vibrações utilizando uma consideração modal.
Para um sistema rotativo simples, a massa dos neutralizadores é estimada através de uma
aproximação. Esta aproximação considera o modelo do rotor em repouso (Ωrpm = 0), compa-
tível com o de uma viga simplesmente apoiada, e através de uma equivalência, é estimada a
massa do neutralizador. Neste trabalho, a massa dos neutralizadores projetados para o primeiro
modo de flexão, é de aproximadamente de 5 (%) da massa do sistema primário ou seja, cerca
de 10 (%) da sua massa equivalente, como sugerido por HARTOG (1956).
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 82/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 63
4.2 Função Objetivo
Neste trabalho, propõe-se empregar uma técnica de otimização não linear, através de uma
função objetivo f xn×1 deRn →R, sendo x o vetor projeto (seção 4.3 e B.1) que é composto
pela freqüência natural dos neutralizadores.
A definição da função objetivo utilizando as coordenadas principais P(Ω) (Equação 3.15),
é feita basicamente pelas seguintes razões:
1. As operações matriciais tem ordens de grandeza reduzidas, 2n, importante para sistemas
muito discretizados. O número de operações com ponto flutuante (FLOP) envolvidas
no produto de matrizes é aproximadamente proporcional ao cubo da ordem da matriz
(NISHTALA et al. (2004)).
2. O resultado em termos de coordenadas principais não depende da coordenada de avalia-
ção da resposta, mas da excitação. Teoricamente se pode otimizar o sistema através da
norma 2 da matriz resposta em freqüência [α (Ω)] de ordem elevada ou através de uma
função resposta, onde ainda é preciso definir uma coordenada de avaliação k .
Para uma otimização de Rn → R sobre as coordenadas principais reduzidas P(Ω), pode-seobter um vetor de máximos absolutos para cada par de coordenadas principais correspondente
ao modo que se deseja minimizar, na faixa de freqüências estabelecida, retornando então ao
otimizador a norma 2 deste vetor (1).
f ob j( x) = m axΩ1<Ω<Ω2
P(Ω, x) , xT = [Ωa1, ..., Ωan] . Eq. 4.1
onde Ωa1, ..., Ωan são as freqüências ótimas dos neutralizadores.
A faixa de freqüências Ω1 <Ω < Ω2, deve ser estabelecida de tal forma que os modos quese desejam controlar estejam contemplados. Tais modos podem ser obtidos do programa de
dinâmica de rotores, já que os modos de flexão são inerentes às rotações críticas.
A excitação pode ser constante para uma dada rotação ou quadrática para resposta ao des-
balanceamento, devendo ser aplicada distante dos nós dos modos que se deseja controlar (ver
anexo G.1) uma vez que a otimização se dá sobre a resposta.
Uma análise sobre a composição da solução da resposta em freqüência, mostra que as co-
ordenadas principais assim como os autovalores, ocorrem aos pares conjugados, conforme a
1Norma 2 ou euclidiana de um vetor é definida como:T ∑i |T i|2
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 83/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 64
expressão
[Θ]2n×2nP(Ω)2n×1 = Q(Ω)2n×1, Eq. 4.2
Q1
Qi
Q2n
2n×1
=
(Θ11P1 +Θ12P2) + ... + (Θ12n−1P2n−1 +Θ12nP2n)
(Θi1P1 +Θi2P2) + ... + (Θi2n−1P2n−1 +Θi2nP2n)
(Θ2n1P1 +Θ2n2P2) + ... + (Θ2n2n−1P2n−1 +Θ2n2nP2n)
2n×1
, Eq. 4.3
Qi = Σn j=1 Li j Eq. 4.4
com
Li j =Θik Pk +Θi(k +1)P(k +1)
, k = 2( j −1) + 1. Eq. 4.5
Sendo assim, na i-ésima coordenada, para cada j-ésima freqüência a ser controlada, deve-se
considerar a contribuição da soma do par correspondente Li j.
A otimização proposta é aplicada sobre um modelo do sistema primário baseado em parâ-
metros modais. Assim genericamente, pode-se aplicar a formulação tanto para minimizar uma
resposta ao desbalanceamento quanto para uma rotação constante qualquer. O resultado do
projeto ótimo depende dos parâmetros modais correspondentes à condição do sistema primário.
4.3 Implementação
Toda a implementação foi desenvolvida utilizando-se o software livre Scilab R(2). O código
do RotorDin foi portado do originalmente escrito em Matlab R, acrescentando funcionalidades
de exportação dos parâmetros modais para o modelo rotação constante e resposta ao desbalan-
ceamento, inclusão de parâmetros equivalentes generalizados modelo viscoelástico nas matrizesde massa e amortecimento, entre outras.
O código para projeto ótimo dos neutralizadores dinâmicos é totalmente novo e foi desen-
volvido para o modelo no espaço de estado “simplificado” e parâmetros equivalentes generali-
zados para material viscoelástico. Como entrada são necessários os parâmetros modais, parâ-
metros do modelo de derivada fracionária do material viscoelástico utilizado no neutralizador
(Equação 2.120 e Equação 2.121), massa dos neutralizadores e configurações como:
• faixa de freqüência,
2Scilab Home Pageh t t p : / / w w w . s c i l a b . o r g
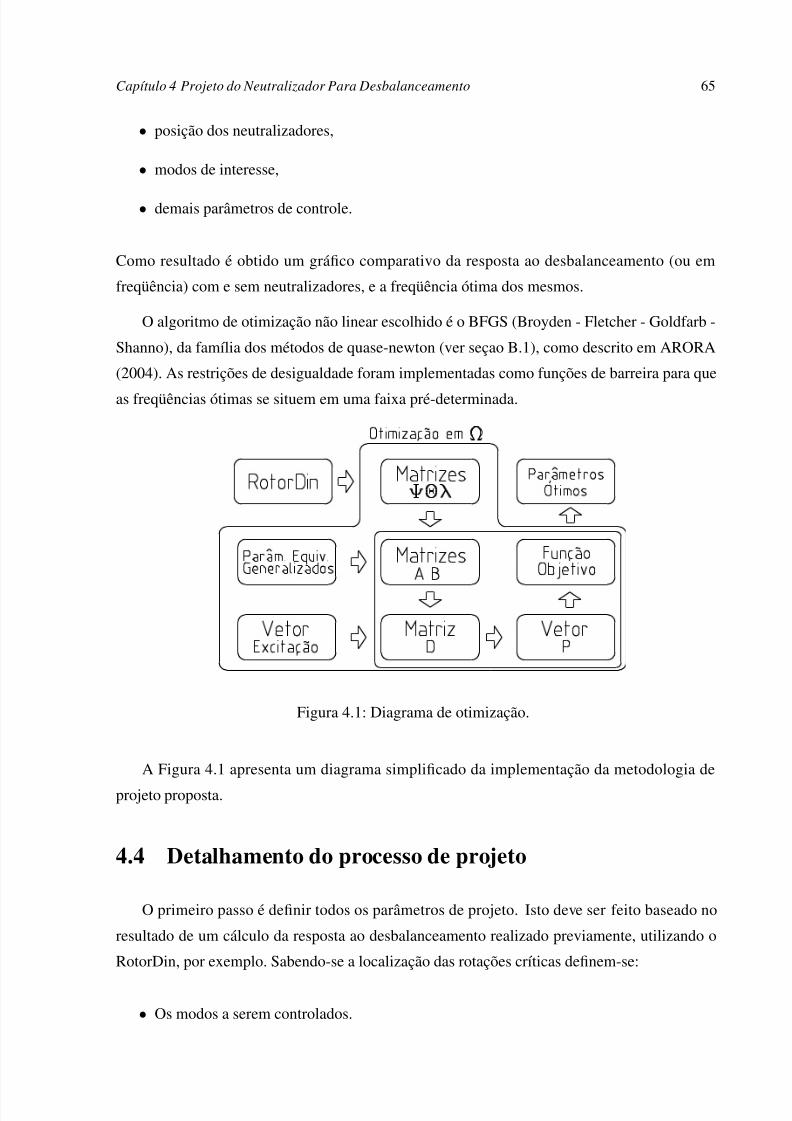
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 84/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 65
• posição dos neutralizadores,
• modos de interesse,
• demais parâmetros de controle.
Como resultado é obtido um gráfico comparativo da resposta ao desbalanceamento (ou em
freqüência) com e sem neutralizadores, e a freqüência ótima dos mesmos.
O algoritmo de otimização não linear escolhido é o BFGS (Broyden - Fletcher - Goldfarb -
Shanno), da família dos métodos de quase-newton (ver seçao B.1), como descrito em ARORA
(2004). As restrições de desigualdade foram implementadas como funções de barreira para que
as freqüências ótimas se situem em uma faixa pré-determinada.
Figura 4.1: Diagrama de otimização.
A Figura 4.1 apresenta um diagrama simplificado da implementação da metodologia de
projeto proposta.
4.4 Detalhamento do processo de projeto
O primeiro passo é definir todos os parâmetros de projeto. Isto deve ser feito baseado no
resultado de um cálculo da resposta ao desbalanceamento realizado previamente, utilizando o
RotorDin, por exemplo. Sabendo-se a localização das rotações críticas definem-se:
• Os modos a serem controlados.
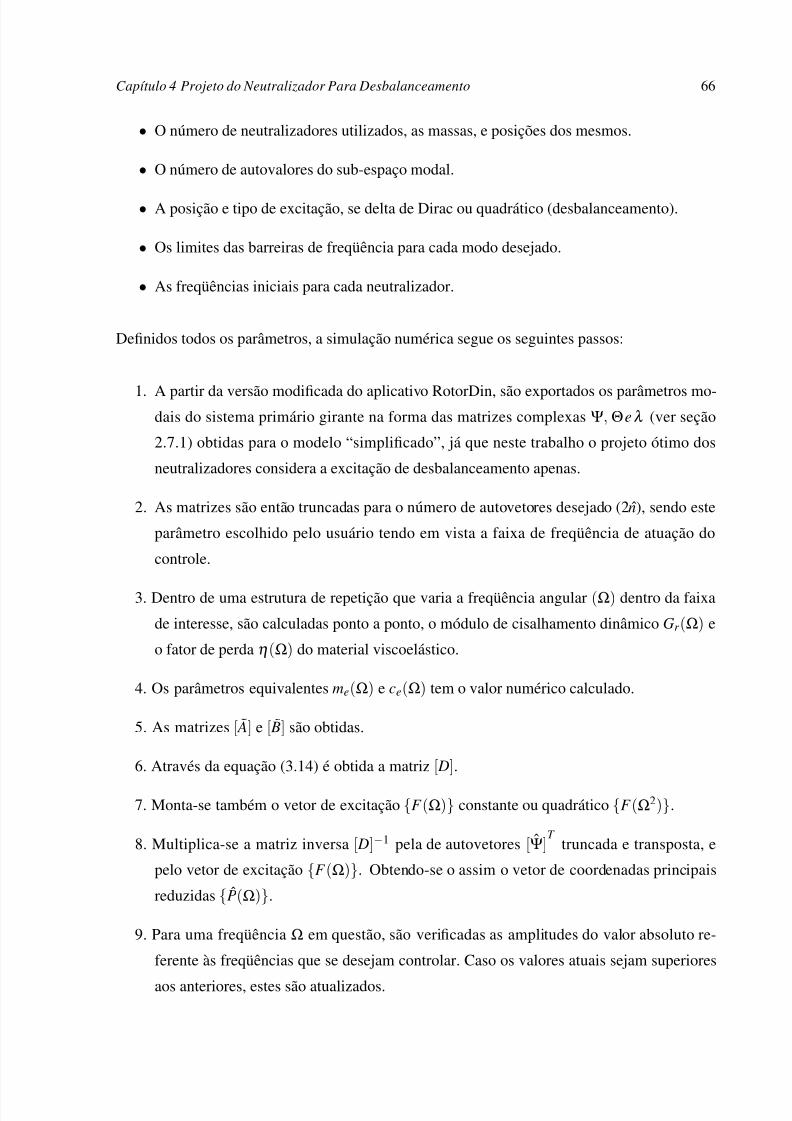
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 85/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 66
• O número de neutralizadores utilizados, as massas, e posições dos mesmos.
• O número de autovalores do sub-espaço modal.
• A posição e tipo de excitação, se delta de Dirac ou quadrático (desbalanceamento).
• Os limites das barreiras de freqüência para cada modo desejado.
• As freqüências iniciais para cada neutralizador.
Definidos todos os parâmetros, a simulação numérica segue os seguintes passos:
1. A partir da versão modificada do aplicativo RotorDin, são exportados os parâmetros mo-dais do sistema primário girante na forma das matrizes complexas Ψ, Θeλ (ver seção
2.7.1) obtidas para o modelo “simplificado”, já que neste trabalho o projeto ótimo dos
neutralizadores considera a excitação de desbalanceamento apenas.
2. As matrizes são então truncadas para o número de autovetores desejado (2n), sendo este
parâmetro escolhido pelo usuário tendo em vista a faixa de freqüência de atuação do
controle.
3. Dentro de uma estrutura de repetição que varia a freqüência angular (Ω) dentro da faixa
de interesse, são calculadas ponto a ponto, o módulo de cisalhamento dinâmico Gr (Ω) e
o fator de perda η(Ω) do material viscoelástico.
4. Os parâmetros equivalentes me(Ω) e ce(Ω) tem o valor numérico calculado.
5. As matrizes [ ˜ A] e [ ˜ B] são obtidas.
6. Através da equação (3.14) é obtida a matriz [ D].
7. Monta-se também o vetor de excitação F (Ω) constante ou quadrático F (Ω2).
8. Multiplica-se a matriz inversa [ D]−1 pela de autovetores ˆ[Ψ]T
truncada e transposta, e
pelo vetor de excitação F (Ω). Obtendo-se o assim o vetor de coordenadas principais
reduzidas P(Ω).
9. Para uma freqüência Ω em questão, são verificadas as amplitudes do valor absoluto re-
ferente às freqüências que se desejam controlar. Caso os valores atuais sejam superiores
aos anteriores, estes são atualizados.
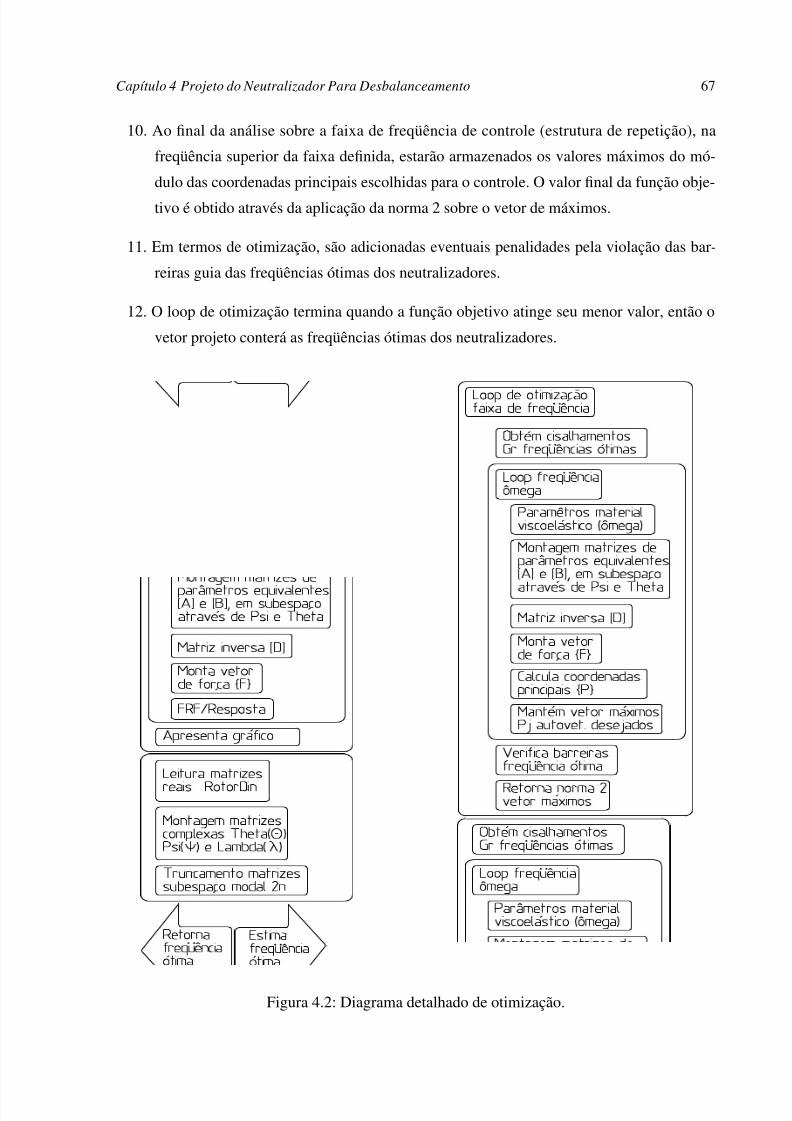
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 86/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 67
10. Ao final da análise sobre a faixa de freqüência de controle (estrutura de repetição), na
freqüência superior da faixa definida, estarão armazenados os valores máximos do mó-
dulo das coordenadas principais escolhidas para o controle. O valor final da função obje-
tivo é obtido através da aplicação da norma 2 sobre o vetor de máximos.
11. Em termos de otimização, são adicionadas eventuais penalidades pela violação das bar-
reiras guia das freqüências ótimas dos neutralizadores.
12. O loop de otimização termina quando a função objetivo atinge seu menor valor, então o
vetor projeto conterá as freqüências ótimas dos neutralizadores.
Figura 4.2: Diagrama detalhado de otimização.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 87/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 68
Após concluída a otimização das freqüências dos neutralizadores (Figura 4.2) o software de
projeto apresenta a resposta ao desbalanceamento com e sem neutralizadores. Eventualmente,
de posse dos parâmetros modais do sistema primário e da freqüência ótima do neutralizador
é possível obter somente o gráfico da resposta (com e sem neutralizadores fixados ao sistema
primário).
De posse das freqüências ótimas e definida a massa do neutralizador, é possível determinar
o parâmetro L utilizando-se a relação da Equação 2.104. Geralmente a espessura h do material
é definida. Através da Equação 2.105 obtém-se a área de aplicação do carregamento A, estando
assim o projeto do neutralizador definido. No caso se se trabalhar com o material vulcanizado,
é necessário definir uma espessura dentro dos limites do processo de fabricação, ficando assim
a espessura h a ser calculada.
4.5 Sistema Primário - Identificação
Os neutralizadores são projetados para o sistema primário montado no LAVIB (Figura 4.3),
destinado ao estudo da dinâmica de rotores, também denominado “rotor rig”. A montagem
é acionada por um motor alimentado através de inversor de freqüência, que permite variar a
velocidade numa ampla faixa, tipicamente de 0-7000 (rpm). O sistema primário é montado deforma que sua primeira rotação crítica se situe próxima aos 3500 (rpm). Esta configuração foi
obtida simulando a geometria no RotorDin e variando o número de discos, suas posições e a
posição dos mancais.
Figura 4.3: Bancada de teste do LAVIB.
A configuração projetada conforme o esquema da Figura 4.3 e Figura 4.5, é composta por:
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 88/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 69
1. Eixo:
• Um eixo cilíndrico de aço com 25 (mm) de diâmetro e 1000 (mm) de comprimento
(9). Para o material do eixo é adotado para o módulo de Young o valor de E=207 (GPa)
e ν =0.3 para o coeficiente de Poisson. Sua massa específica é considerada 7850(kg/m3).
2. Discos:
• Um acoplamento elástico que é considerado como um disco de ferro fundido com
80(mm) de diâmetro e 30 (mm) de espessura (2), localizado na origem do sistema
de coordenadas. A massa específica é considerada 7850(kg/m3). Este elemento
desacopla o motor elétrico do sistema mecânico.• Um disco de alumínio de 240 (mm) de diâmetro e 9(mm) de espessura (7), situ-
ado a 475 (mm) da extremidade do lado acionado. A massa específica é adotada
2700 (kg/m3).
• Os dois discos, um de proteção e outro para medição são construídos em aço e tem
diâmetro de 80 (mm) e 10(mm) de espessura (4 e 5), estando localizados a 250 e
325 (mm) respectivamente. Massa específica considerada 7850 (kg/m3).
3. Mancais:
• Dois mancais de rolamento com rigidez elevada (ver anexo C.1) k xx = k zz∼= 1E 9( N /m)
(3 e 8), localizados a 80 e730(mm) apóiam o eixo.
• O mancal é composto por um rolamento auto-compensador de esferas, inserido em
um suporte de ferro fundido nodular quadrilateral, ao qual são fixados os neutrali-
zadores. O suporte por sua vez, é mantido estático por meio de molas helicoidais
ligadas a uma estrutura metálica estática, localizado a 380 (mm) da extremidade.
As propriedades de rigidez e amortecimento das molas foram determinadas expe-
rimentalmente (ver anexo H.1) e valem respectivamente k xx = k zz = 55.1E 3( N /m)
e c xx = c zz = 18( Ns/m). A massa do falso mancal de 0.83(kg) é adicionada pelo
aplicativo RotorDin, na matriz de massa [ M ] (Equação 2.53) na coordenada corres-
pondente do sistema primário.
Para o amortecimento dos mancais de rolamento foi adotado uma amortecimento viscoso c de
aproximadamente c xx = c zz = 5 ( Ns/m), o que corresponde a um fator de aproximadamente0.25%, ζ = 0.0025 do valor equivalente para um sistema de um grau de liberdade c = 2mΩnζ .
O valor é considerado plausível e foi atribuído com base em medições preliminares. Este valor é
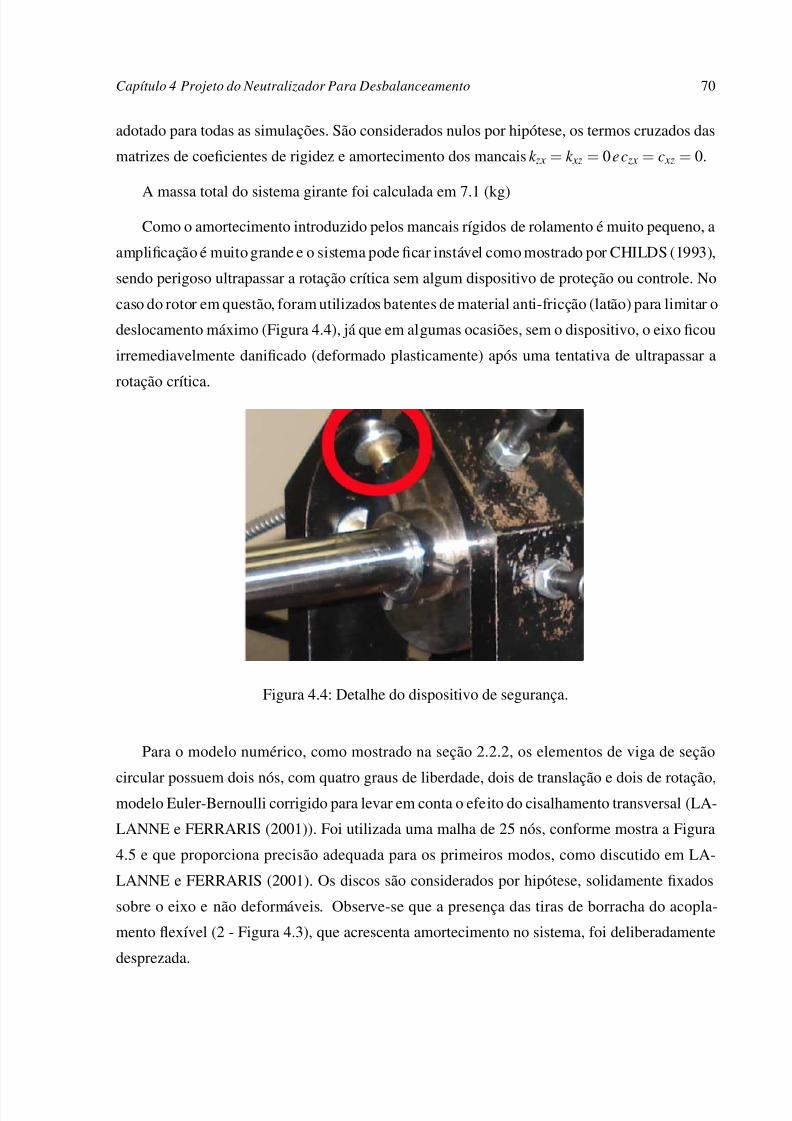
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 89/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 70
adotado para todas as simulações. São considerados nulos por hipótese, os termos cruzados das
matrizes de coeficientes de rigidez e amortecimento dos mancais k zx = k xz = 0ec zx = c xz = 0.
A massa total do sistema girante foi calculada em 7.1 (kg)Como o amortecimento introduzido pelos mancais rígidos de rolamento é muito pequeno, a
amplificação é muito grande e o sistema pode ficar instável como mostrado por CHILDS (1993),
sendo perigoso ultrapassar a rotação crítica sem algum dispositivo de proteção ou controle. No
caso do rotor em questão, foram utilizados batentes de material anti-fricção (latão) para limitar o
deslocamento máximo (Figura 4.4), já que em algumas ocasiões, sem o dispositivo, o eixo ficou
irremediavelmente danificado (deformado plasticamente) após uma tentativa de ultrapassar a
rotação crítica.
Figura 4.4: Detalhe do dispositivo de segurança.
Para o modelo numérico, como mostrado na seção 2.2.2, os elementos de viga de seção
circular possuem dois nós, com quatro graus de liberdade, dois de translação e dois de rotação,modelo Euler-Bernoulli corrigido para levar em conta o efeito do cisalhamento transversal (LA-
LANNE e FERRARIS (2001)). Foi utilizada uma malha de 25 nós, conforme mostra a Figura
4.5 e que proporciona precisão adequada para os primeiros modos, como discutido em LA-
LANNE e FERRARIS (2001). Os discos são considerados por hipótese, solidamente fixados
sobre o eixo e não deformáveis. Observe-se que a presença das tiras de borracha do acopla-
mento flexível (2 - Figura 4.3), que acrescenta amortecimento no sistema, foi deliberadamente
desprezada.
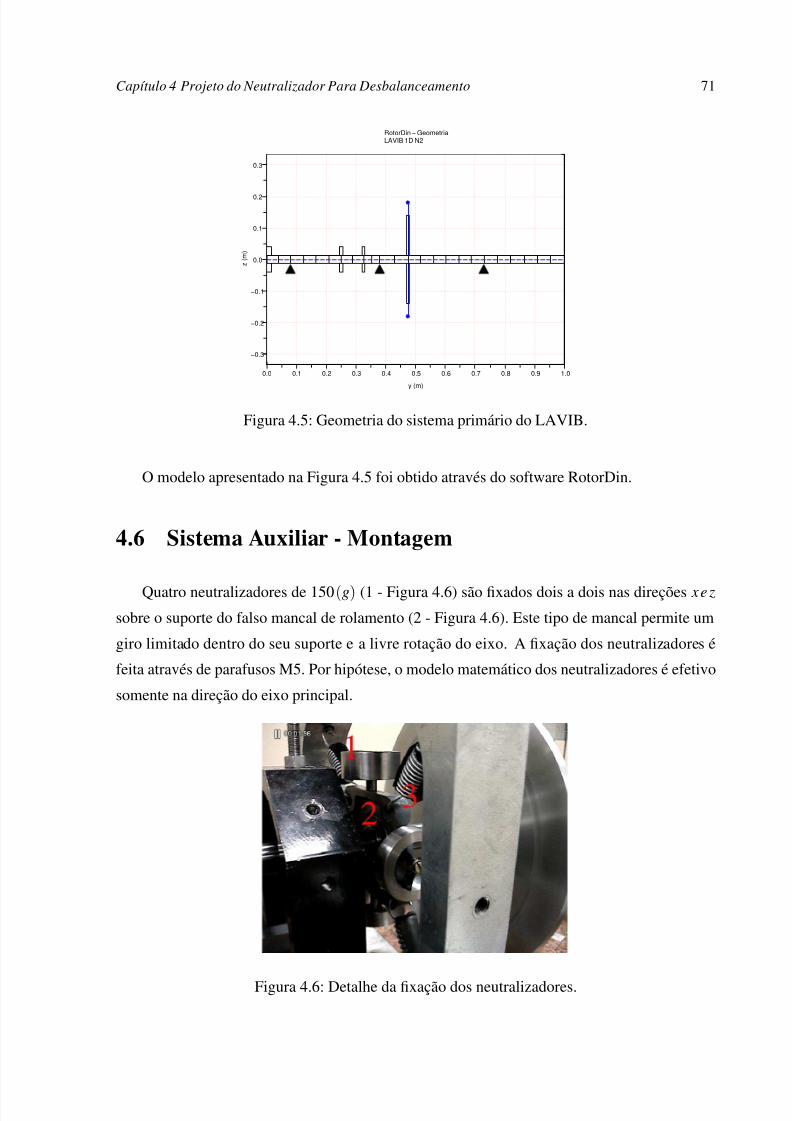
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 90/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 71
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
−0.3
−0.2
−0.1
0.0
0.1
0.2
0.3
RotorDin − GeometriaLAVIB 1D N2
y (m)
z ( m )
Figura 4.5: Geometria do sistema primário do LAVIB.
O modelo apresentado na Figura 4.5 foi obtido através do software RotorDin.
4.6 Sistema Auxiliar - Montagem
Quatro neutralizadores de 150(g) (1 - Figura 4.6) são fixados dois a dois nas direções xe zsobre o suporte do falso mancal de rolamento (2 - Figura 4.6). Este tipo de mancal permite um
giro limitado dentro do seu suporte e a livre rotação do eixo. A fixação dos neutralizadores é
feita através de parafusos M5. Por hipótese, o modelo matemático dos neutralizadores é efetivo
somente na direção do eixo principal.
Figura 4.6: Detalhe da fixação dos neutralizadores.
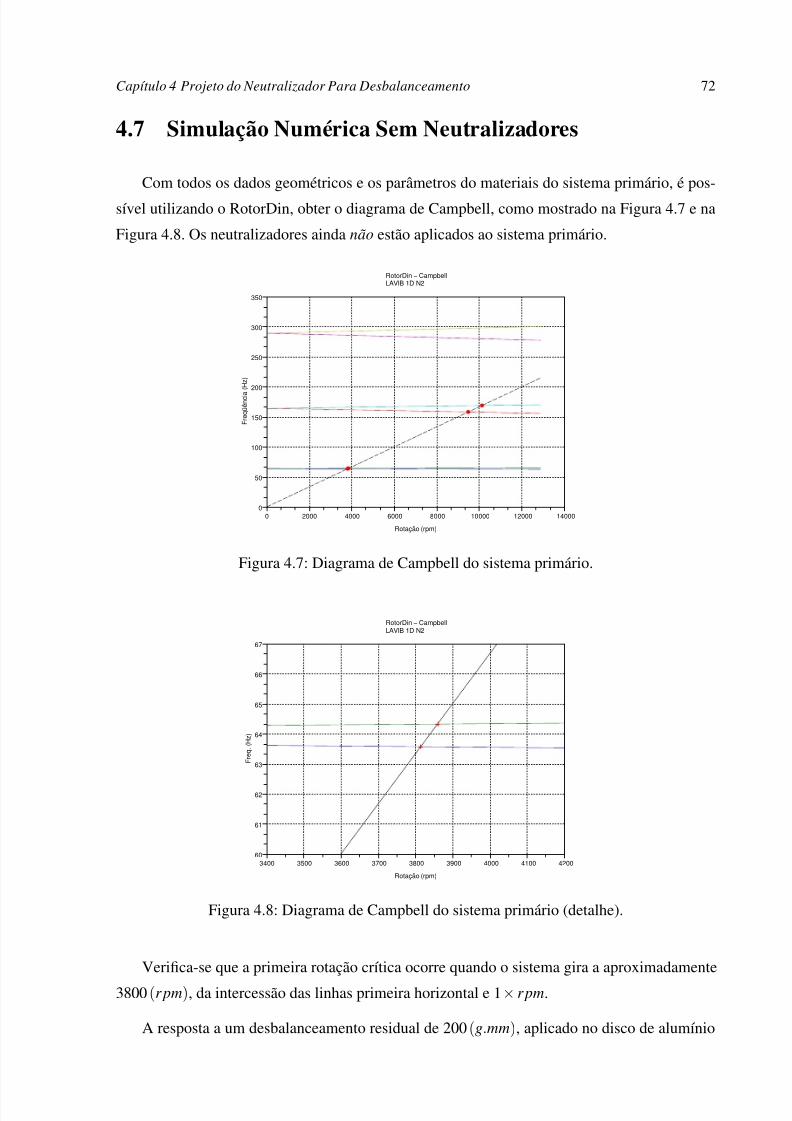
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 91/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 72
4.7 Simulação Numérica Sem Neutralizadores
Com todos os dados geométricos e os parâmetros do materiais do sistema primário, é pos-
sível utilizando o RotorDin, obter o diagrama de Campbell, como mostrado na Figura 4.7 e na
Figura 4.8. Os neutralizadores ainda não estão aplicados ao sistema primário.
0 2000 4000 6000 8000 10000 12000 14000
0
50
100
150
200
250
300
350
RotorDin − CampbellLAVIB 1D N2
Rotação (rpm)
F r e q ü ê n c i a
( H z )
Figura 4.7: Diagrama de Campbell do sistema primário.
3400 3500 3600 3700 3800 3900 4000 4100 4200
60
61
62
63
64
65
66
67
RotorDin − CampbellLAVIB 1D N2
Rotação (rpm)
F r e q .
( H z )
Figura 4.8: Diagrama de Campbell do sistema primário (detalhe).
Verifica-se que a primeira rotação crítica ocorre quando o sistema gira a aproximadamente
3800 (rpm), da intercessão das linhas primeira horizontal e 1 × rpm.
A resposta a um desbalanceamento residual de 200 (g.mm), aplicado no disco de alumínio
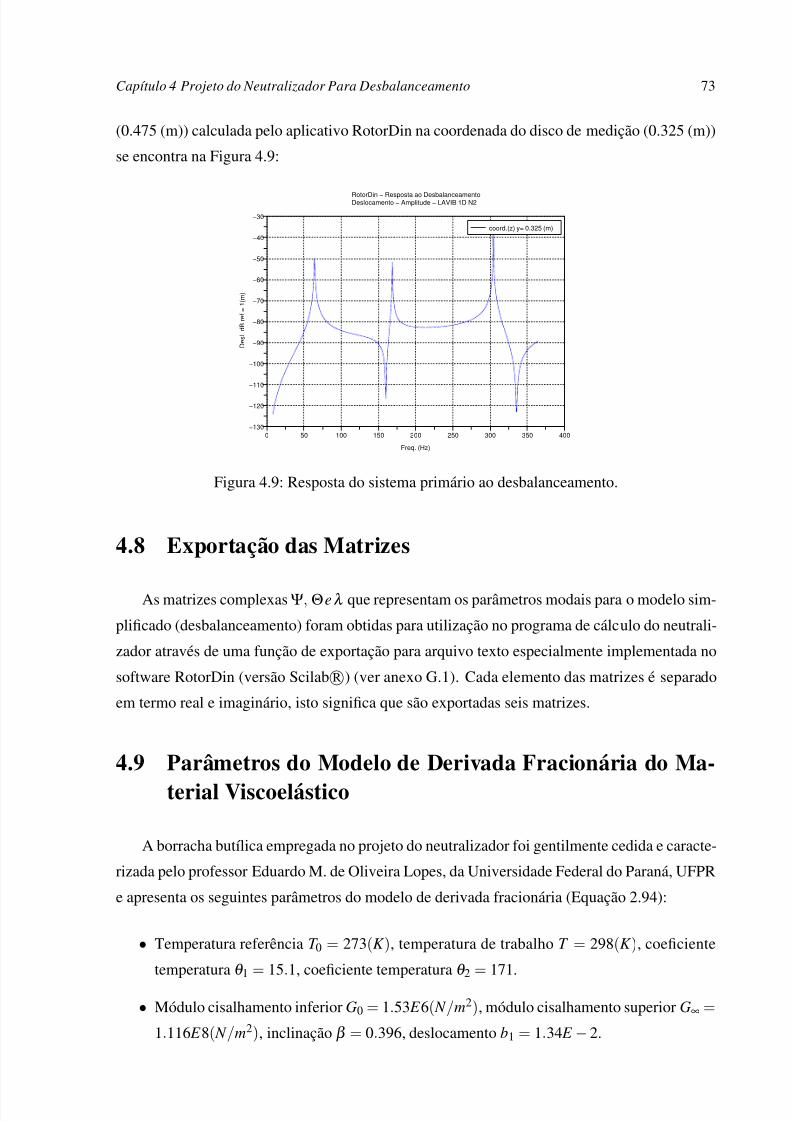
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 92/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 73
(0.475 (m)) calculada pelo aplicativo RotorDin na coordenada do disco de medição (0.325 (m))
se encontra na Figura 4.9:
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
−30
RotorDin − Resposta ao DesbalanceamentoDeslocamento − Amplitude − LAVIB 1D N2
Freq. (Hz)
D e s l . d B r e f = 1 ( m )
coord.(z) y= 0.325 (m)
Figura 4.9: Resposta do sistema primário ao desbalanceamento.
4.8 Exportação das Matrizes
As matrizes complexasΨ, Θeλ que representam os parâmetros modais para o modelo sim-
plificado (desbalanceamento) foram obtidas para utilização no programa de cálculo do neutrali-
zador através de uma função de exportação para arquivo texto especialmente implementada no
software RotorDin (versão Scilab R) (ver anexo G.1). Cada elemento das matrizes é separado
em termo real e imaginário, isto significa que são exportadas seis matrizes.
4.9 Parâmetros do Modelo de Derivada Fracionária do Ma-
terial Viscoelástico
A borracha butílica empregada no projeto do neutralizador foi gentilmente cedida e caracte-
rizada pelo professor Eduardo M. de Oliveira Lopes, da Universidade Federal do Paraná, UFPR
e apresenta os seguintes parâmetros do modelo de derivada fracionária (Equação 2.94):
• Temperatura referência T 0 = 273(K ), temperatura de trabalho T = 298(K ), coeficiente
temperatura θ 1 = 15.1, coeficiente temperatura θ 2 = 171.
• Módulo cisalhamento inferior G0 = 1.53E 6( N /m2), módulo cisalhamento superior G∞ =
1.116E 8( N /m2), inclinação β = 0.396, deslocamento b1 = 1.34E −2.
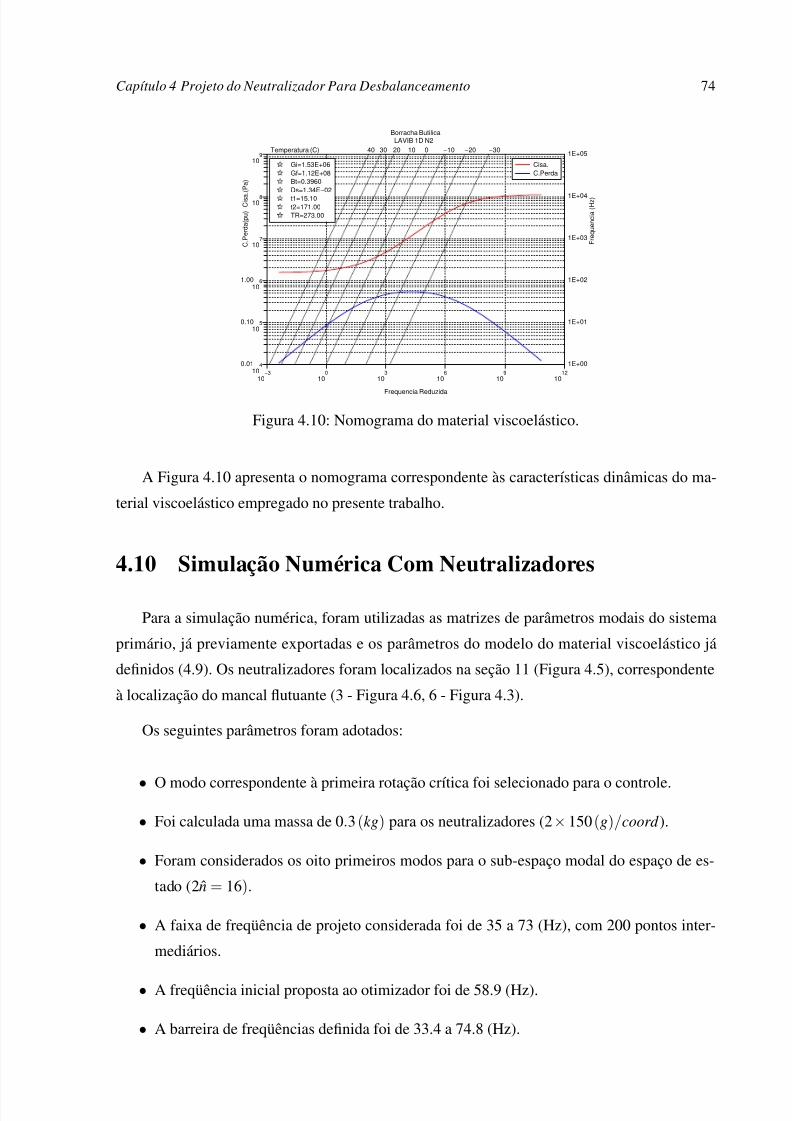
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 93/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 74
1E+00
1E+01
1E+02
1E+03
1E+04
1E+05
F r e q u e n c i a ( H z )
40 30 20 10 0 −10 −20 −30Temperatura (C)
0.01
0.10
1.00
−310
010
310
610
910
1210
410
510
610
710
810
910
Borracha ButilicaLAVIB 1D N2
Frequencia Reduzida
C . P e r d a ( p u )
C i s a
. ( P a )
Cisa.
C.Perda
Gi=1.53E+06
Gf=1.12E+08
Bt=0.3960
Ds=1.34E−02
t1=15.10t2=171.00
TR=273.00
Figura 4.10: Nomograma do material viscoelástico.
A Figura 4.10 apresenta o nomograma correspondente às características dinâmicas do ma-
terial viscoelástico empregado no presente trabalho.
4.10 Simulação Numérica Com Neutralizadores
Para a simulação numérica, foram utilizadas as matrizes de parâmetros modais do sistema
primário, já previamente exportadas e os parâmetros do modelo do material viscoelástico já
definidos (4.9). Os neutralizadores foram localizados na seção 11 (Figura 4.5), correspondente
à localização do mancal flutuante (3 - Figura 4.6, 6 - Figura 4.3).
Os seguintes parâmetros foram adotados:
• O modo correspondente à primeira rotação crítica foi selecionado para o controle.
• Foi calculada uma massa de 0.3 (kg) para os neutralizadores (2×150(g)/coord ).
• Foram considerados os oito primeiros modos para o sub-espaço modal do espaço de es-
tado (2n = 16).
• A faixa de freqüência de projeto considerada foi de 35 a 73 (Hz), com 200 pontos inter-
mediários.
• A freqüência inicial proposta ao otimizador foi de 58.9 (Hz).
• A barreira de freqüências definida foi de 33.4 a 74.8 (Hz).
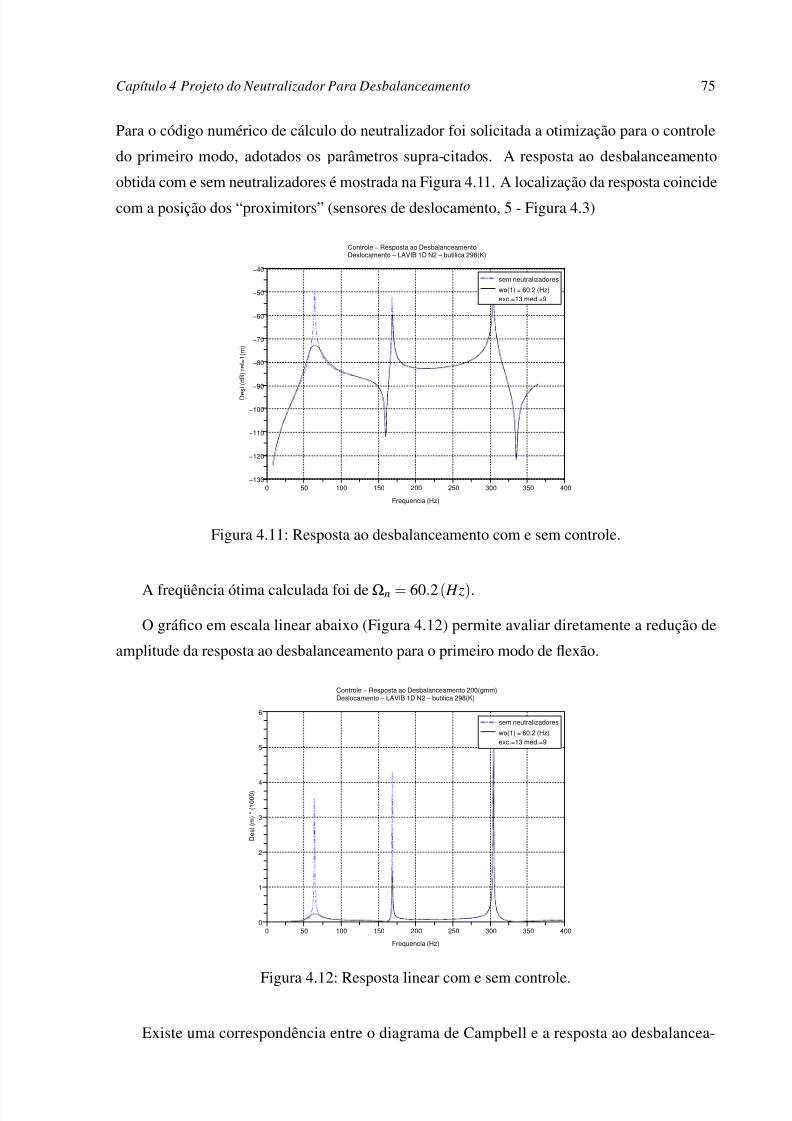
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 94/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 75
Para o código numérico de cálculo do neutralizador foi solicitada a otimização para o controle
do primeiro modo, adotados os parâmetros supra-citados. A resposta ao desbalanceamento
obtida com e sem neutralizadores é mostrada na Figura 4.11. A localização da resposta coincide
com a posição dos “proximitors” (sensores de deslocamento, 5 - Figura 4.3)
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
Controle − Resposta ao DesbalanceamentoDeslocamento − LAVIB 1D N2 − butilica 298(K)
Frequencia (Hz)
D e s l ( d B ) r e f = 1 ( m )
sem neutralizadores
wo(1) = 60.2 (Hz)
exc.=13 med.=9
Figura 4.11: Resposta ao desbalanceamento com e sem controle.
A freqüência ótima calculada foi de Ωn = 60.2( Hz).
O gráfico em escala linear abaixo (Figura 4.12) permite avaliar diretamente a redução de
amplitude da resposta ao desbalanceamento para o primeiro modo de flexão.
0 50 100 150 200 250 300 350 400
0
1
2
3
4
5
6
Controle − Resposta ao Desbalanceamento 200(gmm)Deslocamento − LAVIB 1D N2 − butilica 298(K)
Frequencia (Hz)
D e s l ( m ) * ( 1 0 0 0 )
sem neutralizadores
wo(1) = 60.2 (Hz)
exc.=13 med.=9
Figura 4.12: Resposta linear com e sem controle.
Existe uma correspondência entre o diagrama de Campbell e a resposta ao desbalancea-
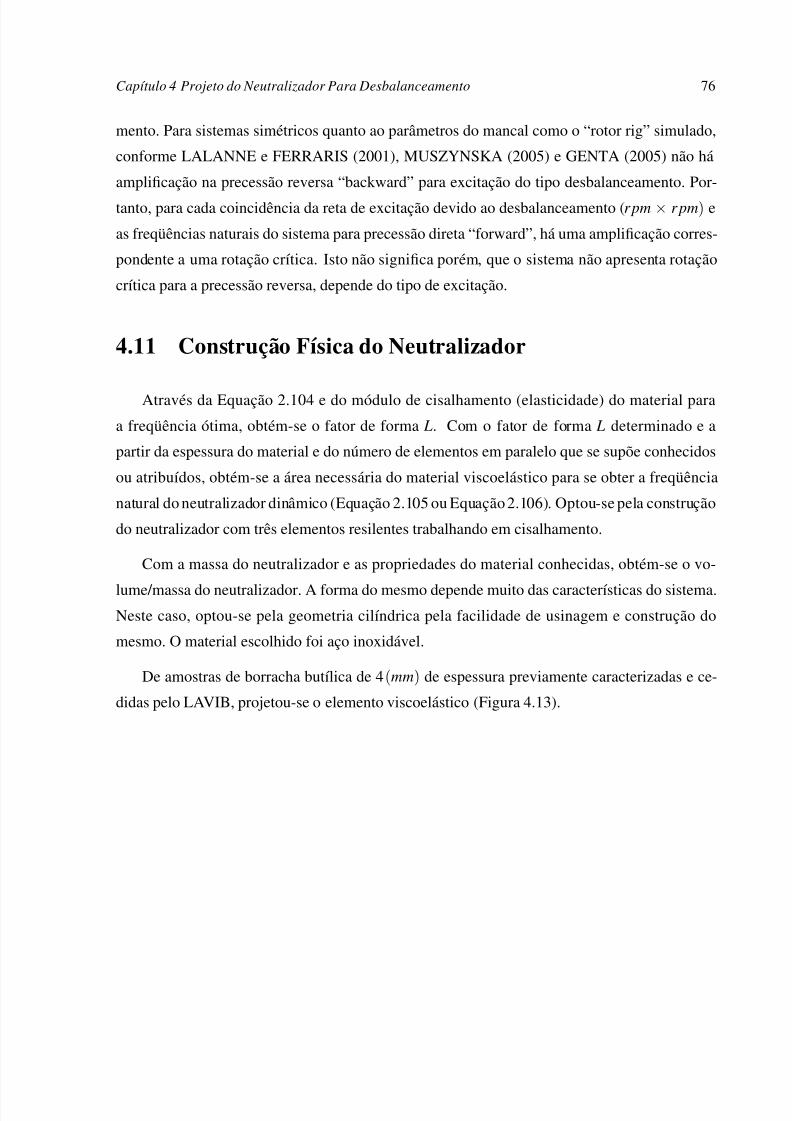
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 95/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 76
mento. Para sistemas simétricos quanto ao parâmetros do mancal como o “rotor rig” simulado,
conforme LALANNE e FERRARIS (2001), MUSZYNSKA (2005) e GENTA (2005) não há
amplificação na precessão reversa “backward” para excitação do tipo desbalanceamento. Por-
tanto, para cada coincidência da reta de excitação devido ao desbalanceamento (rpm × rpm) e
as freqüências naturais do sistema para precessão direta “forward”, há uma amplificação corres-
pondente a uma rotação crítica. Isto não significa porém, que o sistema não apresenta rotação
crítica para a precessão reversa, depende do tipo de excitação.
4.11 Construção Física do Neutralizador
Através da Equação 2.104 e do módulo de cisalhamento (elasticidade) do material para
a freqüência ótima, obtém-se o fator de forma L. Com o fator de forma L determinado e a
partir da espessura do material e do número de elementos em paralelo que se supõe conhecidos
ou atribuídos, obtém-se a área necessária do material viscoelástico para se obter a freqüência
natural do neutralizador dinâmico (Equação 2.105 ou Equação 2.106). Optou-se pela construção
do neutralizador com três elementos resilentes trabalhando em cisalhamento.
Com a massa do neutralizador e as propriedades do material conhecidas, obtém-se o vo-
lume/massa do neutralizador. A forma do mesmo depende muito das características do sistema.Neste caso, optou-se pela geometria cilíndrica pela facilidade de usinagem e construção do
mesmo. O material escolhido foi aço inoxidável.
De amostras de borracha butílica de 4 (mm) de espessura previamente caracterizadas e ce-
didas pelo LAVIB, projetou-se o elemento viscoelástico (Figura 4.13).
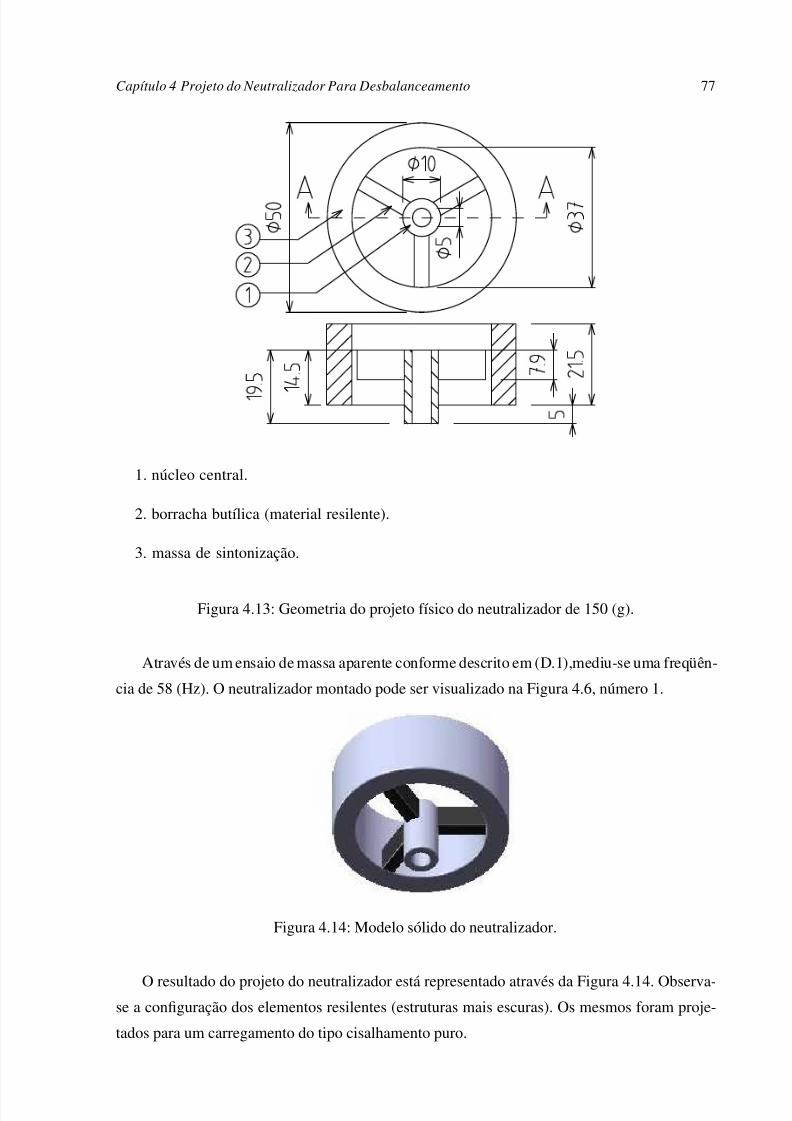
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 96/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 77
1. núcleo central.
2. borracha butílica (material resilente).
3. massa de sintonização.
Figura 4.13: Geometria do projeto físico do neutralizador de 150 (g).
Através de um ensaio de massa aparente conforme descrito em (D.1),mediu-se uma freqüên-
cia de 58 (Hz). O neutralizador montado pode ser visualizado na Figura 4.6, número 1.
Figura 4.14: Modelo sólido do neutralizador.
O resultado do projeto do neutralizador está representado através da Figura 4.14. Observa-se a configuração dos elementos resilentes (estruturas mais escuras). Os mesmos foram proje-
tados para um carregamento do tipo cisalhamento puro.
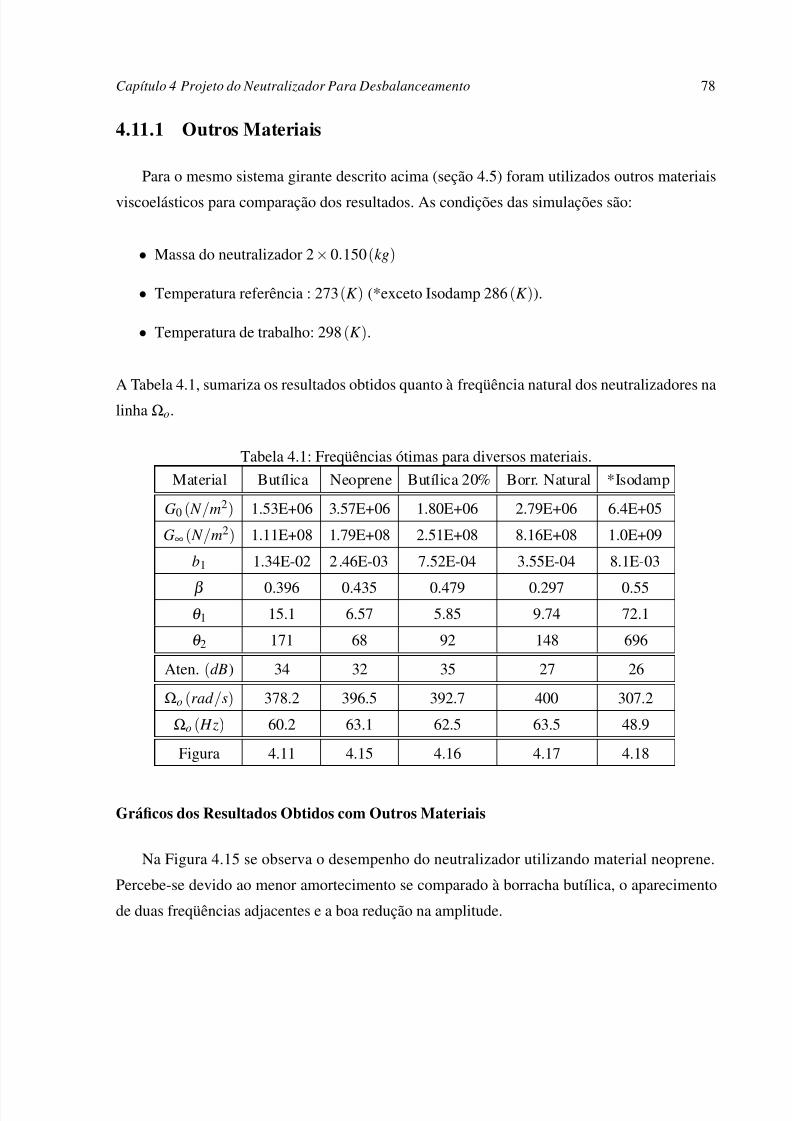
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 97/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 78
4.11.1 Outros Materiais
Para o mesmo sistema girante descrito acima (seção 4.5) foram utilizados outros materiais
viscoelásticos para comparação dos resultados. As condições das simulações são:
• Massa do neutralizador 2 ×0.150(kg)
• Temperatura referência : 273 (K ) (*exceto Isodamp 286 (K )).
• Temperatura de trabalho: 298 (K ).
A Tabela 4.1, sumariza os resultados obtidos quanto à freqüência natural dos neutralizadores nalinha Ωo.
Tabela 4.1: Freqüências ótimas para diversos materiais.
Material Butílica Neoprene Butílica 20% Borr. Natural *Isodamp
G0 ( N /m2) 1.53E+06 3.57E+06 1.80E+06 2.79E+06 6.4E+05
G∞ ( N /m2) 1.11E+08 1.79E+08 2.51E+08 8.16E+08 1.0E+09
b1 1.34E-02 2.46E-03 7.52E-04 3.55E-04 8.1E-03
β 0.396 0.435 0.479 0.297 0.55θ 1 15.1 6.57 5.85 9.74 72.1
θ 2 171 68 92 148 696
Aten. (dB) 34 32 35 27 26
Ωo (rad /s) 378.2 396.5 392.7 400 307.2
Ωo ( Hz) 60.2 63.1 62.5 63.5 48.9
Figura 4.11 4.15 4.16 4.17 4.18
Gráficos dos Resultados Obtidos com Outros Materiais
Na Figura 4.15 se observa o desempenho do neutralizador utilizando material neoprene.
Percebe-se devido ao menor amortecimento se comparado à borracha butílica, o aparecimento
de duas freqüências adjacentes e a boa redução na amplitude.
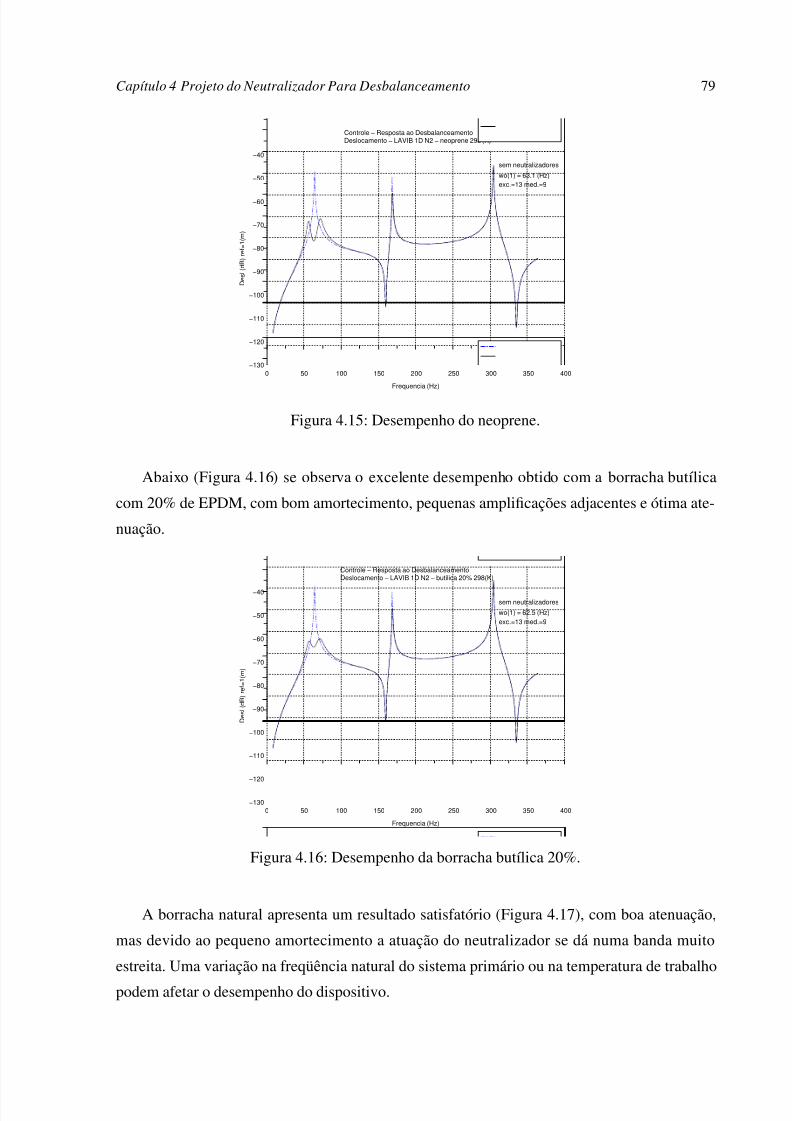
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 98/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 79
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
Controle − Resposta ao DesbalanceamentoDeslocamento − LAVIB 1D N2 − neoprene 298 (K)
Frequencia (Hz)
D e s l ( d B ) r e f = 1 ( m )
sem neutralizadores
wo(1) = 63.1 (Hz)
exc.=13 med.=9
Figura 4.15: Desempenho do neoprene.
Abaixo (Figura 4.16) se observa o excelente desempenho obtido com a borracha butílica
com 20% de EPDM, com bom amortecimento, pequenas amplificações adjacentes e ótima ate-
nuação.
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
Controle − Resposta ao DesbalanceamentoDeslocamento − LAVIB 1D N2 − butilica 20% 298(K)
Frequencia (Hz)
D e s l ( d B ) r e f = 1 ( m )
sem neutralizadores
wo(1) = 62.5 (Hz)
exc.=13 med.=9
Figura 4.16: Desempenho da borracha butílica 20%.
A borracha natural apresenta um resultado satisfatório (Figura 4.17), com boa atenuação,
mas devido ao pequeno amortecimento a atuação do neutralizador se dá numa banda muito
estreita. Uma variação na freqüência natural do sistema primário ou na temperatura de trabalho
podem afetar o desempenho do dispositivo.
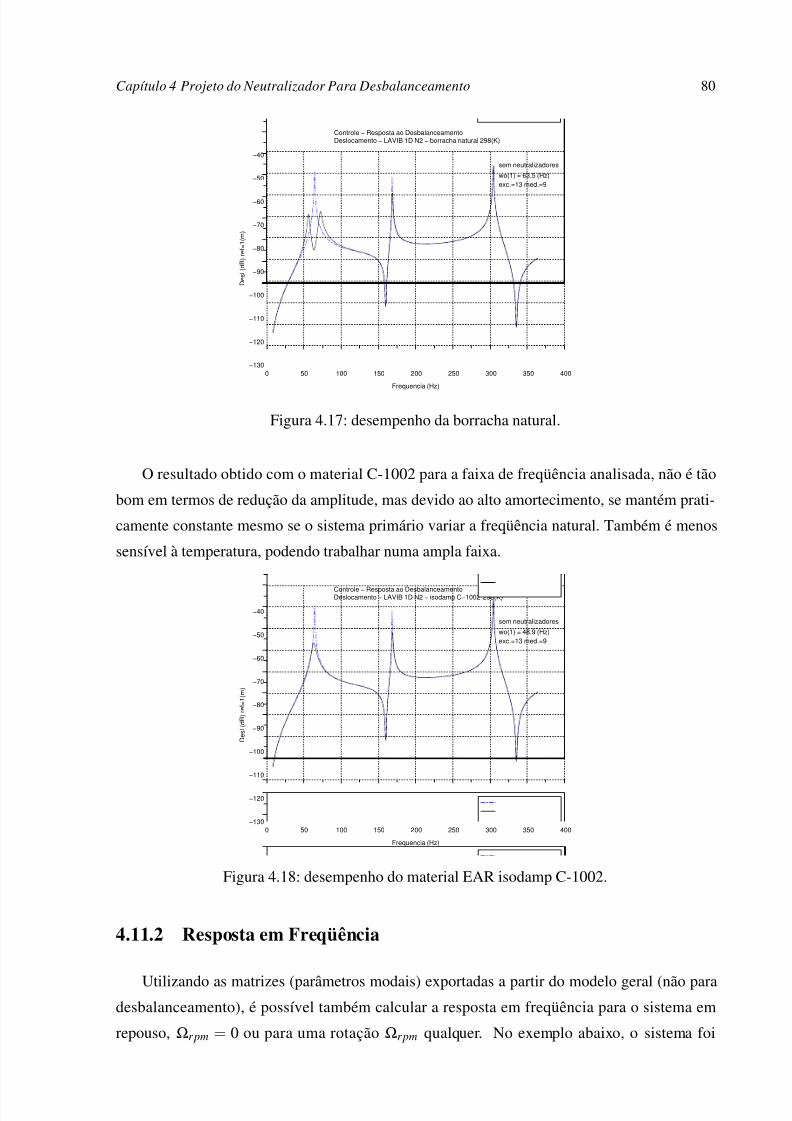
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 99/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 80
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
Controle − Resposta ao DesbalanceamentoDeslocamento − LAVIB 1D N2 − borracha natural 298(K)
Frequencia (Hz)
D e s l ( d B ) r e f = 1 ( m )
sem neutralizadores
wo(1) = 63.5 (Hz)
exc.=13 med.=9
Figura 4.17: desempenho da borracha natural.
O resultado obtido com o material C-1002 para a faixa de freqüência analisada, não é tão
bom em termos de redução da amplitude, mas devido ao alto amortecimento, se mantém prati-
camente constante mesmo se o sistema primário variar a freqüência natural. Também é menos
sensível à temperatura, podendo trabalhar numa ampla faixa.
0 50 100 150 200 250 300 350 400
−130
−120
−110
−100
−90
−80
−70
−60
−50
−40
Controle − Resposta ao DesbalanceamentoDeslocamento − LAVIB 1D N2 − isodamp C−1002 298(K)
Frequencia (Hz)
D e s l ( d B ) r e f = 1 ( m )
sem neutralizadores
wo(1) = 48.9 (Hz)
exc.=13 med.=9
Figura 4.18: desempenho do material EAR isodamp C-1002.
4.11.2 Resposta em Freqüência
Utilizando as matrizes (parâmetros modais) exportadas a partir do modelo geral (não paradesbalanceamento), é possível também calcular a resposta em freqüência para o sistema em
repouso, Ωrpm = 0 ou para uma rotação Ωrpm qualquer. No exemplo abaixo, o sistema foi
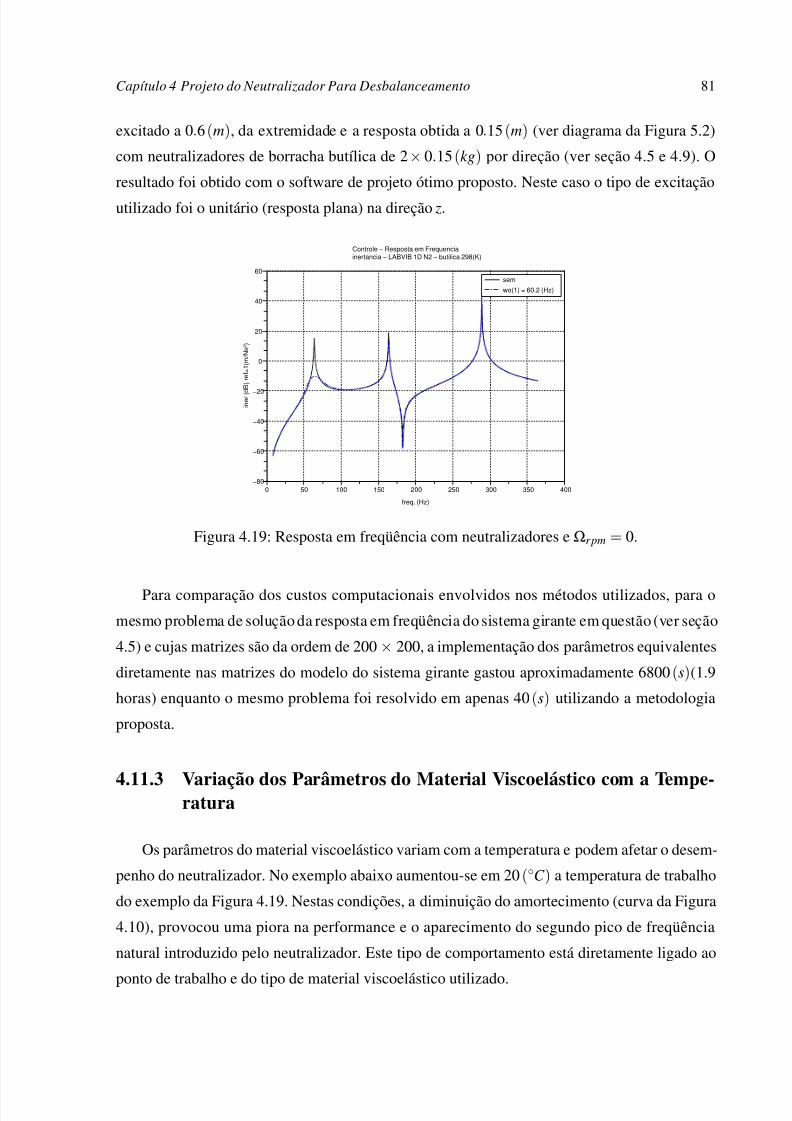
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 100/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 81
excitado a 0.6(m), da extremidade e a resposta obtida a 0.15(m) (ver diagrama da Figura 5.2)
com neutralizadores de borracha butílica de 2 × 0.15(kg) por direção (ver seção 4.5 e 4.9). O
resultado foi obtido com o software de projeto ótimo proposto. Neste caso o tipo de excitação
utilizado foi o unitário (resposta plana) na direção z.
0 50 100 150 200 250 300 350 400
−80
−60
−40
−20
0
20
40
60
Controle − Resposta em Frequenciainertancia − LABVIB 1D N2 − butilica 298(K)
freq. (Hz)
i n e r ( d B ) r e f = 1 ( m / N s ² )
sem
wo(1) = 60.2 (Hz)
Figura 4.19: Resposta em freqüência com neutralizadores e Ωrpm = 0.
Para comparação dos custos computacionais envolvidos nos métodos utilizados, para o
mesmo problema de solução da resposta em freqüência do sistema girante em questão (ver seção
4.5) e cujas matrizes são da ordem de 200 × 200, a implementação dos parâmetros equivalentes
diretamente nas matrizes do modelo do sistema girante gastou aproximadamente 6800 (s)(1.9
horas) enquanto o mesmo problema foi resolvido em apenas 40 (s) utilizando a metodologia
proposta.
4.11.3 Variação dos Parâmetros do Material Viscoelástico com a Tempe-ratura
Os parâmetros do material viscoelástico variam com a temperatura e podem afetar o desem-
penho do neutralizador. No exemplo abaixo aumentou-se em 20 (C ) a temperatura de trabalho
do exemplo da Figura 4.19. Nestas condições, a diminuição do amortecimento (curva da Figura
4.10), provocou uma piora na performance e o aparecimento do segundo pico de freqüência
natural introduzido pelo neutralizador. Este tipo de comportamento está diretamente ligado ao
ponto de trabalho e do tipo de material viscoelástico utilizado.
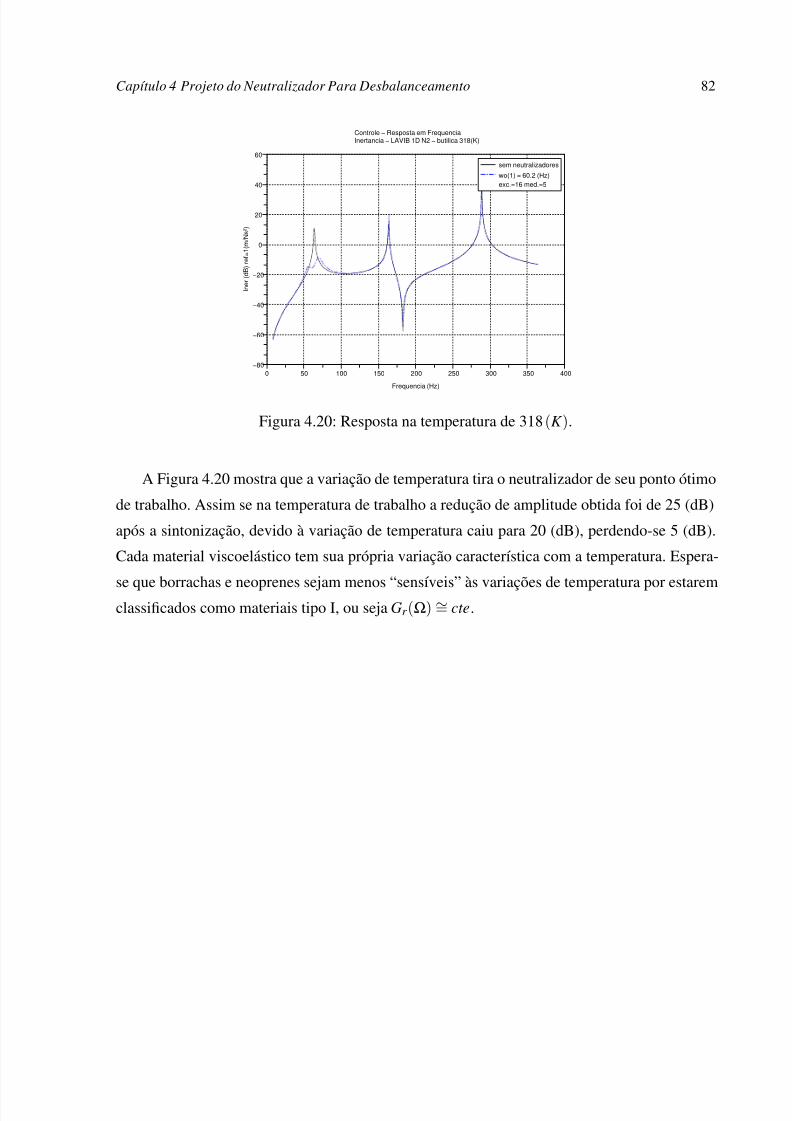
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 101/147
Capítulo 4 Projeto do Neutralizador Para Desbalanceamento 82
0 50 100 150 200 250 300 350 400
−80
−60
−40
−20
0
20
40
60
Controle − Resposta em FrequenciaInertancia − LAVIB 1D N2 − butilica 318(K)
Frequencia (Hz)
I n e r ( d B ) r e f = 1 ( m / N s ² )
sem neutralizadores
wo(1) = 60.2 (Hz)
exc.=16 med.=5
Figura 4.20: Resposta na temperatura de 318 (K ).
A Figura 4.20 mostra que a variação de temperatura tira o neutralizador de seu ponto ótimo
de trabalho. Assim se na temperatura de trabalho a redução de amplitude obtida foi de 25 (dB)
após a sintonização, devido à variação de temperatura caiu para 20 (dB), perdendo-se 5 (dB).
Cada material viscoelástico tem sua própria variação característica com a temperatura. Espera-
se que borrachas e neoprenes sejam menos “sensíveis” às variações de temperatura por estaremclassificados como materiais tipo I, ou seja Gr (Ω) ∼= cte.
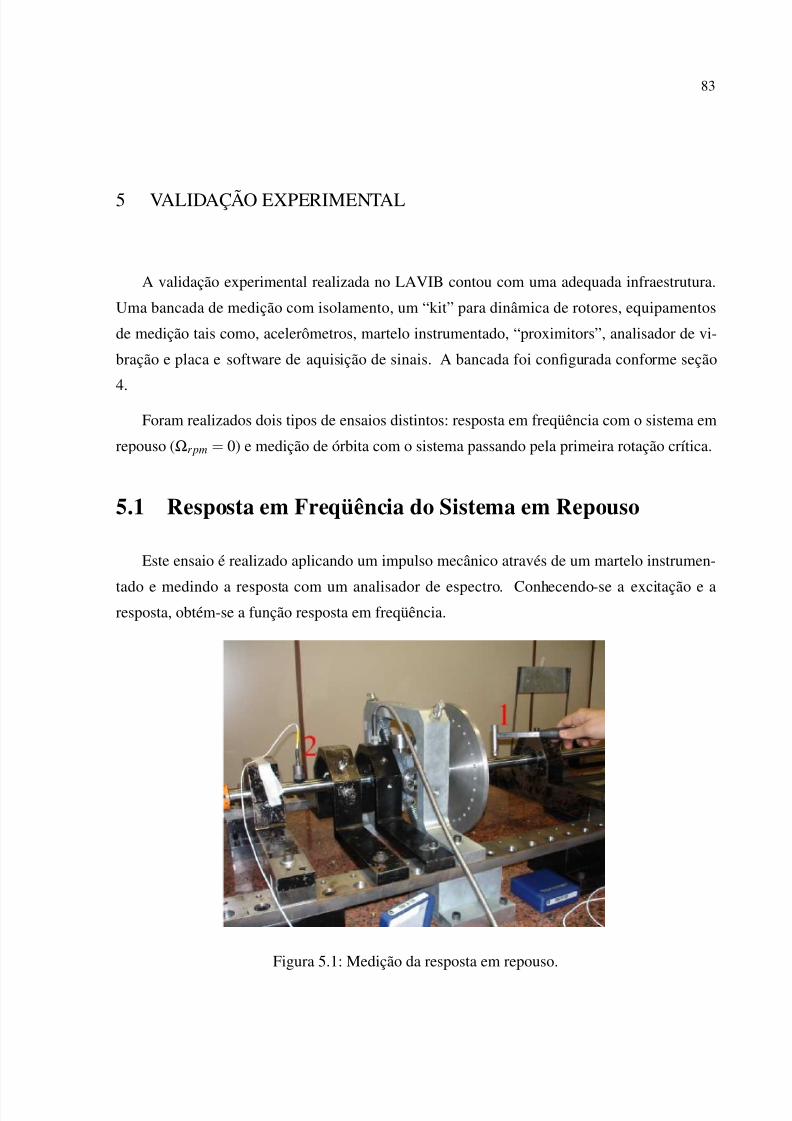
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 102/147
83
5 VALIDAÇÃO EXPERIMENTAL
A validação experimental realizada no LAVIB contou com uma adequada infraestrutura.
Uma bancada de medição com isolamento, um “kit” para dinâmica de rotores, equipamentos
de medição tais como, acelerômetros, martelo instrumentado, “proximitors”, analisador de vi-
bração e placa e software de aquisição de sinais. A bancada foi configurada conforme seção
4.Foram realizados dois tipos de ensaios distintos: resposta em freqüência com o sistema em
repouso (Ωrpm = 0) e medição de órbita com o sistema passando pela primeira rotação crítica.
5.1 Resposta em Freqüência do Sistema em Repouso
Este ensaio é realizado aplicando um impulso mecânico através de um martelo instrumen-
tado e medindo a resposta com um analisador de espectro. Conhecendo-se a excitação e aresposta, obtém-se a função resposta em freqüência.
Figura 5.1: Medição da resposta em repouso.
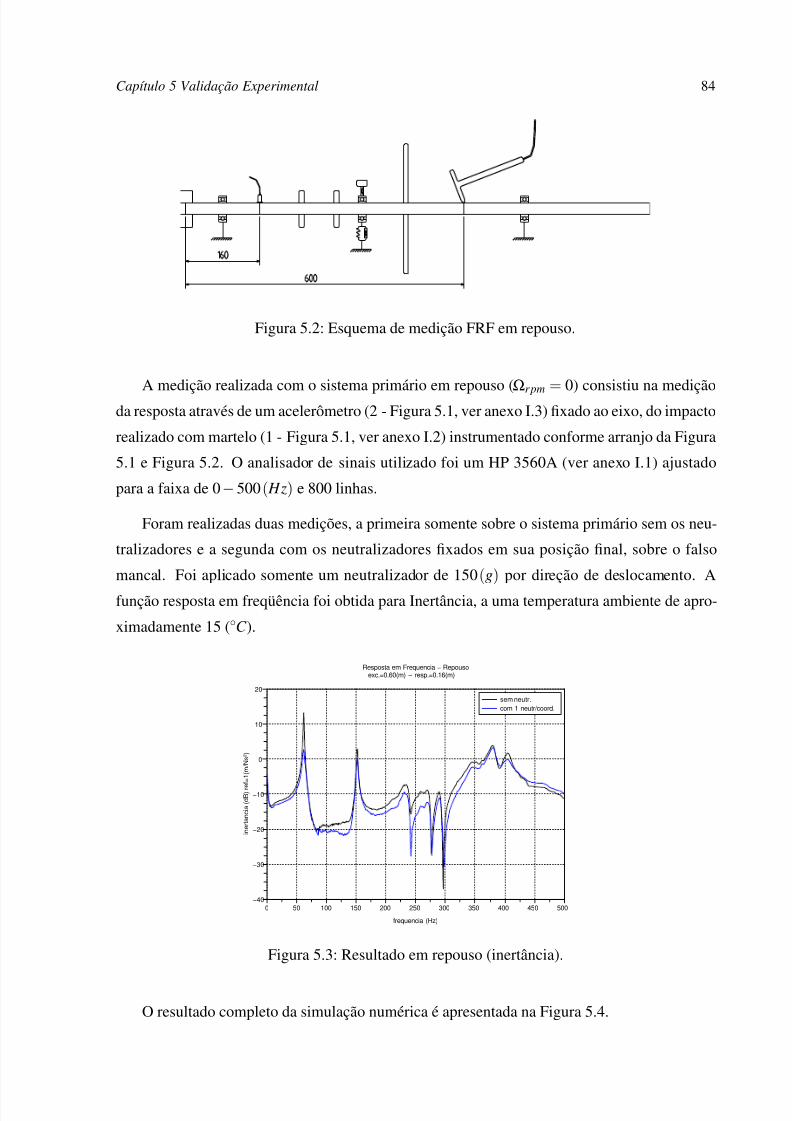
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 103/147
Capítulo 5 Validação Experimental 84
Figura 5.2: Esquema de medição FRF em repouso.
A medição realizada com o sistema primário em repouso (Ω
rpm = 0) consistiu na mediçãoda resposta através de um acelerômetro (2 - Figura 5.1, ver anexo I.3) fixado ao eixo, do impacto
realizado com martelo (1 - Figura 5.1, ver anexo I.2) instrumentado conforme arranjo da Figura
5.1 e Figura 5.2. O analisador de sinais utilizado foi um HP 3560A (ver anexo I.1) ajustado
para a faixa de 0 −500( Hz) e 800 linhas.
Foram realizadas duas medições, a primeira somente sobre o sistema primário sem os neu-
tralizadores e a segunda com os neutralizadores fixados em sua posição final, sobre o falso
mancal. Foi aplicado somente um neutralizador de 150 (g) por direção de deslocamento. A
função resposta em freqüência foi obtida para Inertância, a uma temperatura ambiente de apro-
ximadamente 15 (C ).
0 50 100 150 200 250 300 350 400 450 500
−40
−30
−20
−10
0
10
20
Resposta em Frequencia − Repousoexc.=0.60(m) − resp.=0.16(m)
frequencia (Hz)
i n e r t a n c i a ( d B ) r e
f = 1 ( m / N s ² )
sem neutr.
com 1 neutr/coord.
Figura 5.3: Resultado em repouso (inertância).
O resultado completo da simulação numérica é apresentada na Figura 5.4.
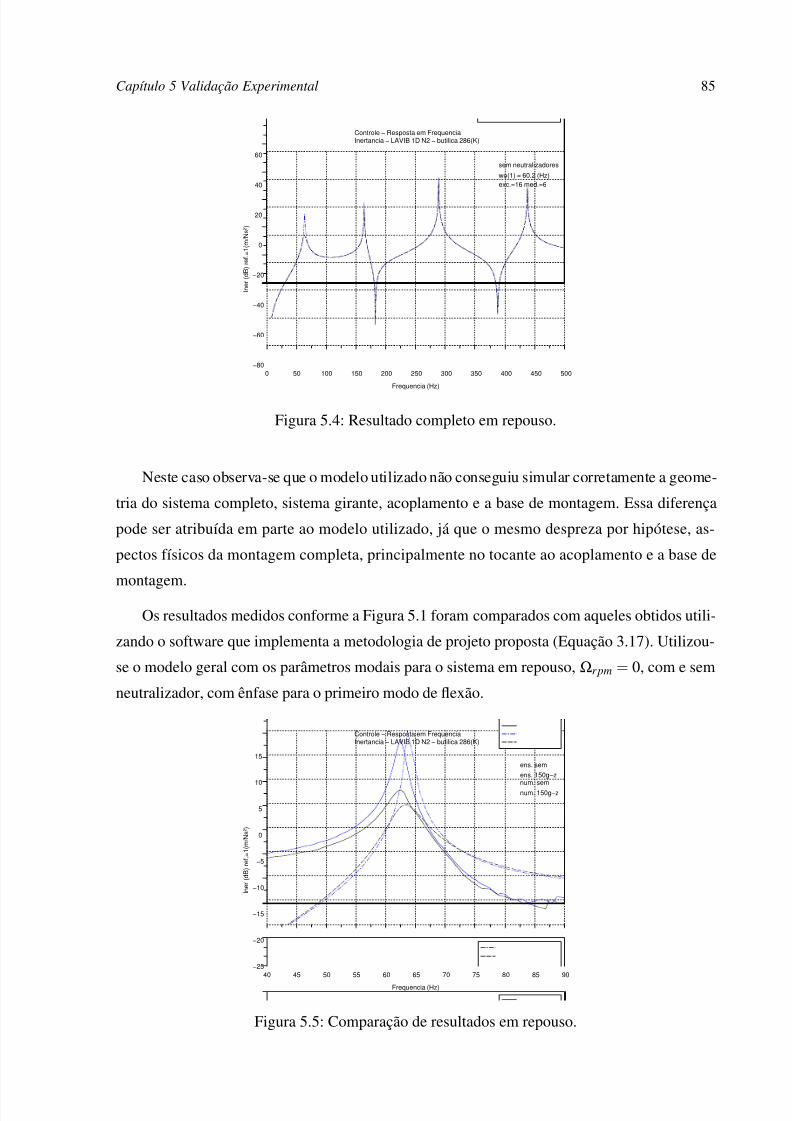
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 104/147
Capítulo 5 Validação Experimental 85
0 50 100 150 200 250 300 350 400 450 500
−80
−60
−40
−20
0
20
40
60
Controle − Resposta em FrequenciaInertancia − LAVIB 1D N2 − butilica 286(K)
Frequencia (Hz)
I n e r ( d B ) r e f . = 1 ( m / N s ² )
sem neutralizadores
wo(1) = 60.2 (Hz)
exc.=16 med.=6
Figura 5.4: Resultado completo em repouso.
Neste caso observa-se que o modelo utilizado não conseguiu simular corretamente a geome-
tria do sistema completo, sistema girante, acoplamento e a base de montagem. Essa diferença
pode ser atribuída em parte ao modelo utilizado, já que o mesmo despreza por hipótese, as-
pectos físicos da montagem completa, principalmente no tocante ao acoplamento e a base de
montagem.
Os resultados medidos conforme a Figura 5.1 foram comparados com aqueles obtidos utili-
zando o software que implementa a metodologia de projeto proposta (Equação 3.17). Utilizou-
se o modelo geral com os parâmetros modais para o sistema em repouso, Ωrpm = 0, com e sem
neutralizador, com ênfase para o primeiro modo de flexão.
40 45 50 55 60 65 70 75 80 85 90
−25
−20
−15
−10
−5
0
5
10
15
Controle − Resposta em FrequenciaInertancia − LAVIB 1D N2 − butilica 286(K)
Frequencia (Hz)
I n e r ( d B ) r e f . = 1 ( m / N s ² )
ens. sem
ens. 150g−z
num. semnum. 150g−z
Figura 5.5: Comparação de resultados em repouso.
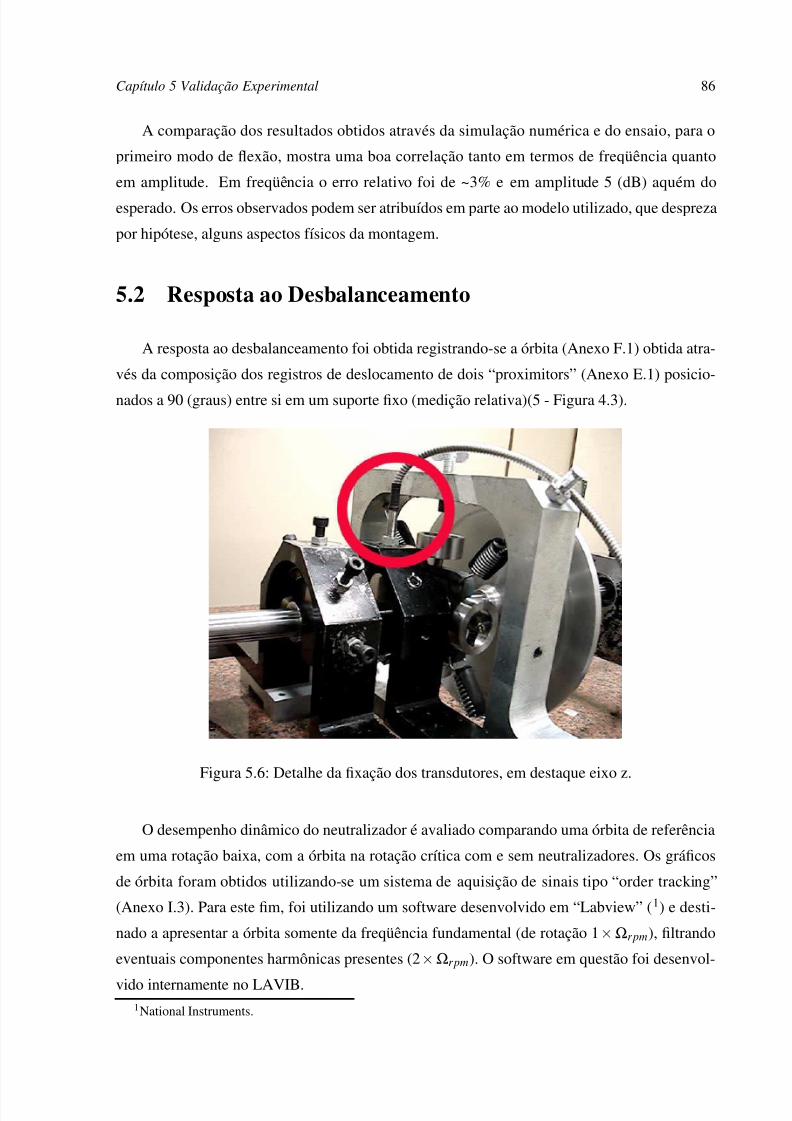
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 105/147
Capítulo 5 Validação Experimental 86
A comparação dos resultados obtidos através da simulação numérica e do ensaio, para o
primeiro modo de flexão, mostra uma boa correlação tanto em termos de freqüência quanto
em amplitude. Em freqüência o erro relativo foi de ~3% e em amplitude 5 (dB) aquém do
esperado. Os erros observados podem ser atribuídos em parte ao modelo utilizado, que despreza
por hipótese, alguns aspectos físicos da montagem.
5.2 Resposta ao Desbalanceamento
A resposta ao desbalanceamento foi obtida registrando-se a órbita (Anexo F.1) obtida atra-
vés da composição dos registros de deslocamento de dois “proximitors” (Anexo E.1) posicio-
nados a 90 (graus) entre si em um suporte fixo (medição relativa)(5 - Figura 4.3).
Figura 5.6: Detalhe da fixação dos transdutores, em destaque eixo z.
O desempenho dinâmico do neutralizador é avaliado comparando uma órbita de referência
em uma rotação baixa, com a órbita na rotação crítica com e sem neutralizadores. Os gráficos
de órbita foram obtidos utilizando-se um sistema de aquisição de sinais tipo “order tracking”
(Anexo I.3). Para este fim, foi utilizando um software desenvolvido em “Labview” (1) e desti-
nado a apresentar a órbita somente da freqüência fundamental (de rotação 1 ×Ωrpm), filtrando
eventuais componentes harmônicas presentes (2×Ωrpm). O software em questão foi desenvol-
vido internamente no LAVIB.1National Instruments.
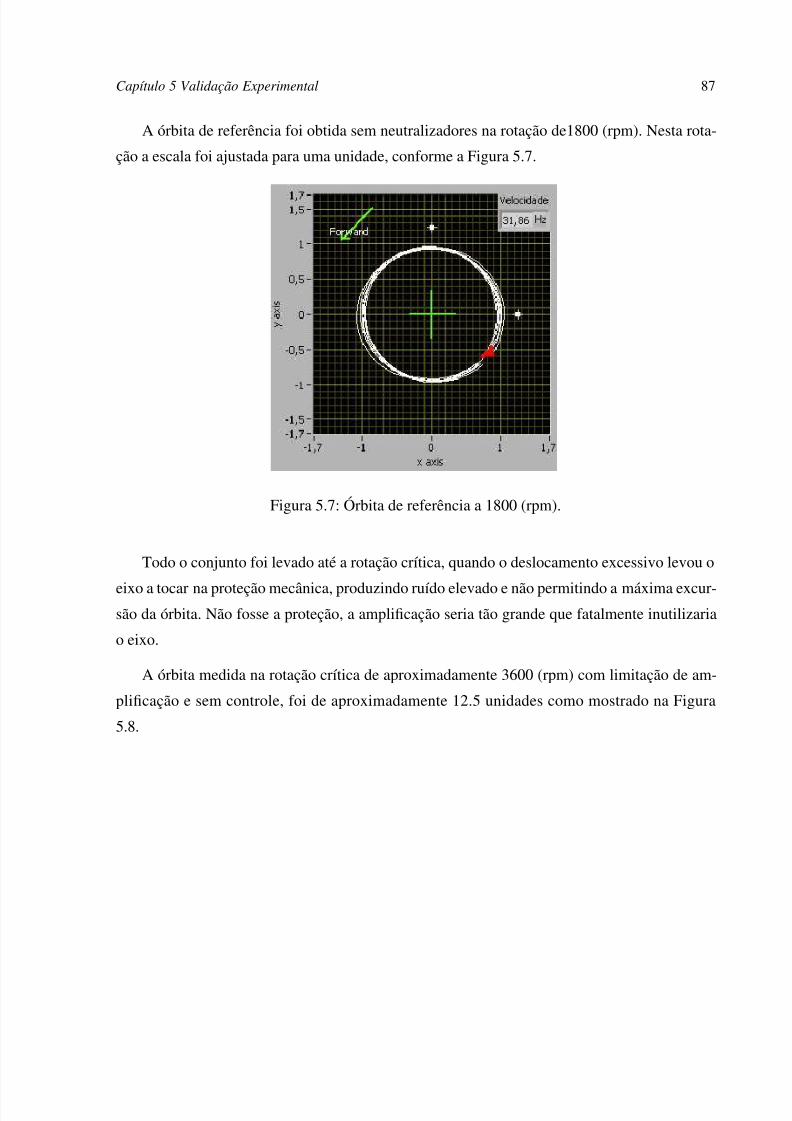
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 106/147
Capítulo 5 Validação Experimental 87
A órbita de referência foi obtida sem neutralizadores na rotação de1800 (rpm). Nesta rota-
ção a escala foi ajustada para uma unidade, conforme a Figura 5.7.
Figura 5.7: Órbita de referência a 1800 (rpm).
Todo o conjunto foi levado até a rotação crítica, quando o deslocamento excessivo levou o
eixo a tocar na proteção mecânica, produzindo ruído elevado e não permitindo a máxima excur-são da órbita. Não fosse a proteção, a amplificação seria tão grande que fatalmente inutilizaria
o eixo.
A órbita medida na rotação crítica de aproximadamente 3600 (rpm) com limitação de am-
plificação e sem controle, foi de aproximadamente 12.5 unidades como mostrado na Figura
5.8.
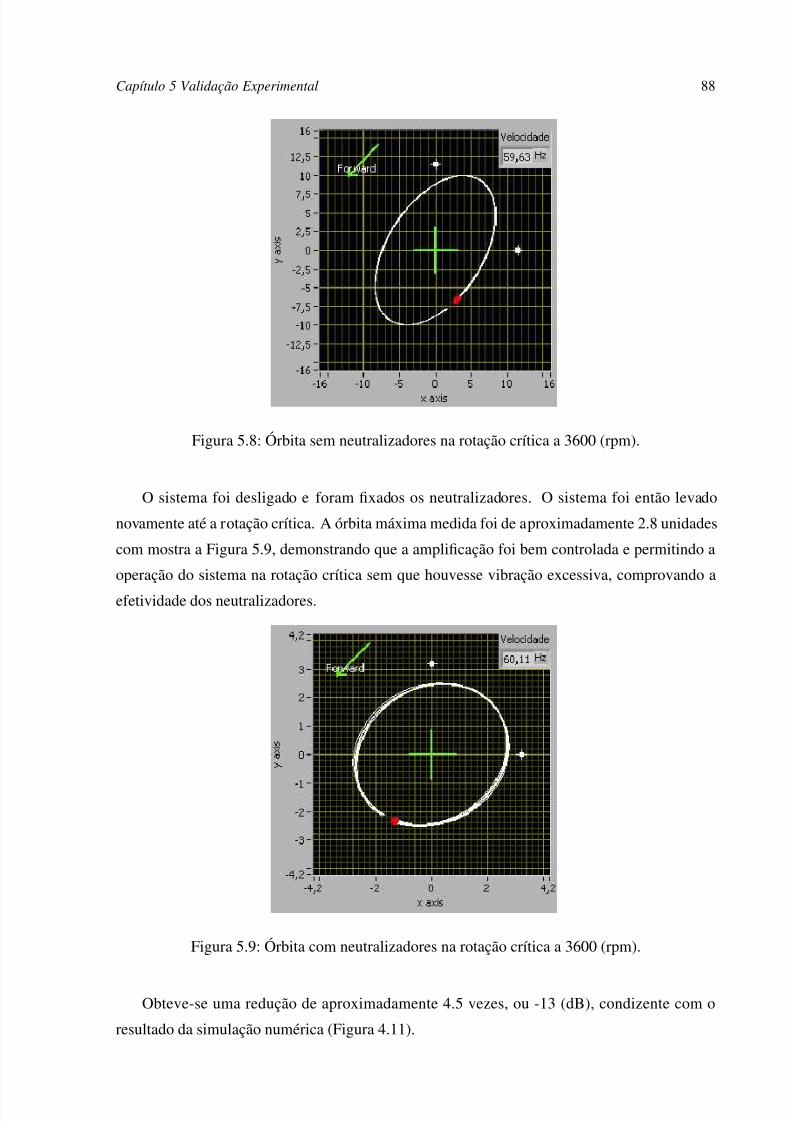
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 107/147
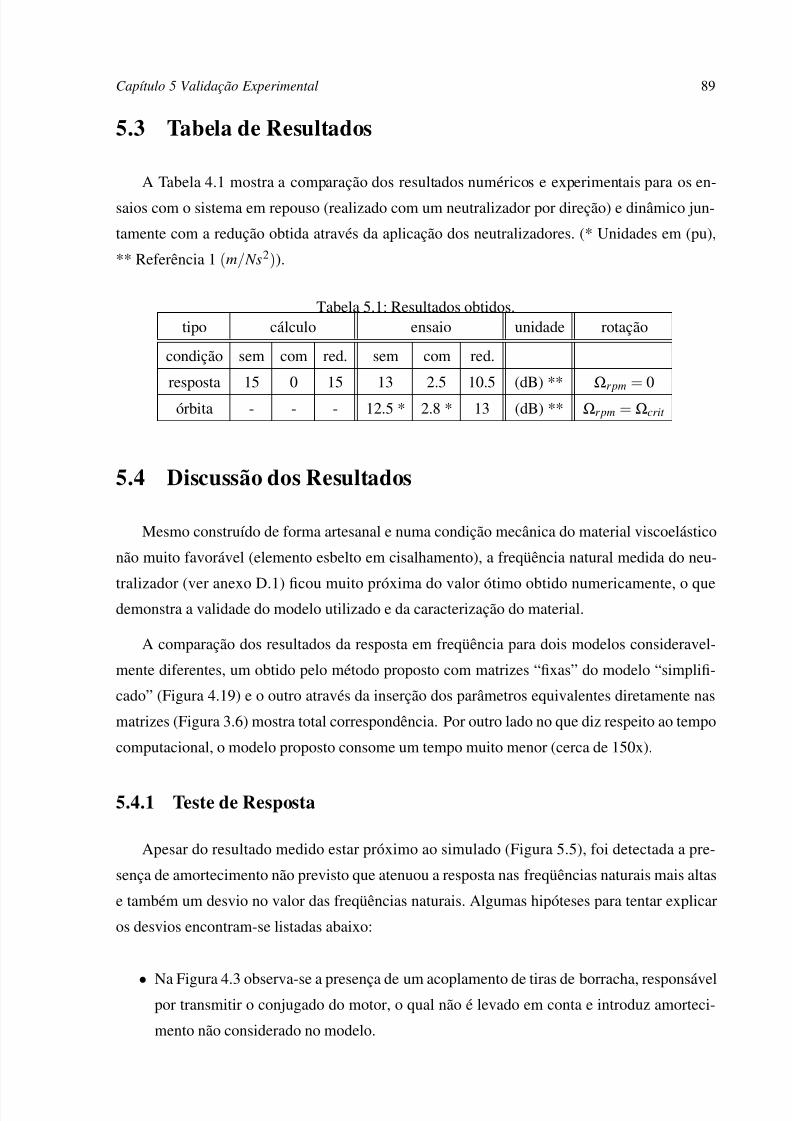
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 108/147
Capítulo 5 Validação Experimental 89
5.3 Tabela de Resultados
A Tabela 4.1 mostra a comparação dos resultados numéricos e experimentais para os en-
saios com o sistema em repouso (realizado com um neutralizador por direção) e dinâmico jun-
tamente com a redução obtida através da aplicação dos neutralizadores. (* Unidades em (pu),
** Referência 1 (m/ Ns2)).
Tabela 5.1: Resultados obtidos.tipo cálculo ensaio unidade rotação
condição sem com red. sem com red.
resposta 15 0 15 13 2.5 10.5 (dB) ** Ωrpm = 0
órbita - - - 12.5 * 2.8 * 13 (dB) ** Ωrpm = Ωcrit
5.4 Discussão dos Resultados
Mesmo construído de forma artesanal e numa condição mecânica do material viscoelástico
não muito favorável (elemento esbelto em cisalhamento), a freqüência natural medida do neu-
tralizador (ver anexo D.1) ficou muito próxima do valor ótimo obtido numericamente, o quedemonstra a validade do modelo utilizado e da caracterização do material.
A comparação dos resultados da resposta em freqüência para dois modelos consideravel-
mente diferentes, um obtido pelo método proposto com matrizes “fixas” do modelo “simplifi-
cado” (Figura 4.19) e o outro através da inserção dos parâmetros equivalentes diretamente nas
matrizes (Figura 3.6) mostra total correspondência. Por outro lado no que diz respeito ao tempo
computacional, o modelo proposto consome um tempo muito menor (cerca de 150x).
5.4.1 Teste de Resposta
Apesar do resultado medido estar próximo ao simulado (Figura 5.5), foi detectada a pre-
sença de amortecimento não previsto que atenuou a resposta nas freqüências naturais mais altas
e também um desvio no valor das freqüências naturais. Algumas hipóteses para tentar explicar
os desvios encontram-se listadas abaixo:
• Na Figura 4.3 observa-se a presença de um acoplamento de tiras de borracha, responsávelpor transmitir o conjugado do motor, o qual não é levado em conta e introduz amorteci-
mento não considerado no modelo.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 109/147
Capítulo 5 Validação Experimental 90
• As tiras de borracha colocadas sobre as molas de sustentação do falso mancal estão mo-
deladas como amortecimento viscoso, por simplicidade, embora sejam de material visco-
elástico (Figura 4.6).
• O posicionamento da medição e excitação no software de projeto do neutralizador é dis-
creto, devido à modelagem através de elementos finitos (Figura 4.5).
• O modelo advindo do software de dinâmica de rotores também diferiu no tocante às
freqüências naturais.
• A variação das propriedades do material viscoelástico com a temperatura, que foi consi-
derada constante.
• Por hipótese foi considerado que os neutralizadores atuam somente na direção principal
de funcionamento, porém existe reação também nas outras direções.
• A rigidez dos suportes dos mancais de rolamento também não foi considerada.
Por outro lado, o resultado para a primeira freqüência natural, de análise, pode ser considerado
preciso.
5.4.2 Órbita
Devido à presença dos limitadores mecânicos não foi possível conhecer a amplitude má-
xima real na rotação crítica e nem o resultado efetivo da redução devido a presença dos neutra-
lizadores.
Sem os neutralizadores e limitadores essa operação é praticamente impossível e normal-
mente a tentativa resulta em dano permanente do eixo, além do risco de danificar os elementos
de medição e outras partes do rotor.
Mesmo assim, os resultados obtidos foram “expressivos” principalmente no tocante à ope-
ração do sistema. Com a aplicação dos neutralizadores o sistema rotativo foi levado acima da
crítica e operado sobre a mesma sem vibração excessiva.
Os resultados obtidos encorajam novos estudos, para dar continuidade nesta linha de pes-
quisa.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 110/147
91
6 CONCLUSÕES
Foi proposta uma metodologia geral de projeto ótimo de neutralizadores dinâmicos viscoe-
lásticos para controle da vibração flexional em sistemas girantes, atuando em uma faixa ampla
de freqüências, a qual pode conter uma ou várias rotações críticas. A modelagem do sistema
composto foi desenvolvida no sub-espaço modal do espaço de estado do sistema primário a
partir dos parâmetros modais deste. O projeto considera que a excitação é do tipo desbalancea-mento.
Para modelar o sistema primário foram revisados conceitos tais como, modelos de ele-
mentos finitos aplicados a dinâmica de rotores, equação de movimento flexional no espaço de
estado, problema de autovalores e o seu problema adjunto, calculo do diagrama de Campbell,
modelo simplificado para excitação do tipo desbalanceamento e resposta em diferentes pontos
do rotor para diferentes excitações no domínio da freqüência.
Para o projeto ótimo dos neutralizadores dinâmicos viscoelásticos foi revisada a metodo-logia geral desenvolvida pelo grupo PISA/CNPq aplicada a estruturas não girantes. Assim,
foram introduzidos ao longo deste trabalho conceitos como parâmetros equivalentes generali-
zados, modelo modal do sistema primário e a resposta do sistema composto (sistema primário
+ neutralizadores), função objetivo e vetor projeto, assim como também uma revisão dos mo-
delos utilizados para materiais viscoelásticos, como o modelo de derivada fracionária de quatro
parâmetros.
Foram implementados os códigos numéricos necessários ao projeto dos dispositivos ótimos.
Para tal fim, foi implementado em SCILAB um novo código, que após receber os parâmetros
modais do sistema primário, obtidos com um código numérico próprio chamado RotorDin, é
capaz de obter, de forma ótima, os parâmetros físicos ótimos do conjunto de neutralizadores.
Foram implementados em SCILAB códigos numéricos para o cálculo do diagrama de
Campbell do sistema composto para simples comparação dos resultados obtidos com os códi-
gos desenvolvidos, que usam no seu calculo os parâmetros modais do sistema primário obtido
através do modelo simplificado. Para implementação destes códigos foi necessário revisar a
teoria de dinâmica de rotores usando mancais compostos com material viscoelástico. Aqui,
deve-se considerar que os materiais viscoelásticos são fortemente dependentes da freqüência (e
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 111/147
Capítulo 6 Conclusões 92
da temperatura), o que leva a ter que resolver um diagrama de Campbell dentro de outro para
obter o diagrama de Campbell final.
Um sistema girante real, composto por um rotor simples, dois mancais rígidos, vários dis-cos e um mancal flexível para posterior fixação dos neutralizadores foi modelado no código
RotorDin desenvolvido no LAVIB. Considerando excitação do tipo desbalanceamento, com
base no modelo simplificado, foram obtidos e exportados os parâmetros modais do sistema a
controlar. A partir do código numérico desenvolvido no presente trabalho, foram projetados de
forma ótima um conjunto de neutralizadores dinâmicos viscoelásticos destinados ao controle
do primeiro modo de flexão do rotor acima citado. Desta forma, foram obtidos os parâmetros
físicos ótimos e, para verificar a eficácia destes dispositivos, foram obtidas as curvas de resposta
do sistema girante com e sem a fixação do dispositivo de controle. Como se pode observar, foipossível obter numericamente uma redução de 23 (dB).
Para validar a metodologia aqui apresentada, os neutralizadores dinâmicos viscoelásticos
foram construídos e montados sobre o sistema girante proposto no modelo numérico. O sis-
tema composto foi então submetido ao teste de resposta em freqüência e medição de órbita a
diferentes rotações e os resultados foram comparados com o sistema sem neutralizadores para
verificar a eficácia destes dispositivos experimentalmente.
As figuras das órbitas obtidas experimentalmente mostram uma redução da resposta vibra-
tória mínima de 13 (dB). A redução medida seria maior se os limitadores pudessem ter sido
retirados durante a operação sem neutralizadores, o que por outro lado poderia levar a ruptura
do rotor ou provocar grandes deformações plásticas o que poderia danificar os sensores. A
função resposta em freqüência obtida do teste de resposta em freqüência com o rotor parado,
comprovou a validade dos modelos adotados ao apresentar resultados compatíveis com os obti-
dos numericamente. O erro na diferença entre os resultados obtidos com e sem neutralizadores,
numérica e experimentalmente foi de 4.5 (dB) para mais.Utilizando o código numérico desenvolvido, foi possível simular o sistema composto tam-
bém através da inclusão do modelo de parâmetros equivalentes generalizados dos neutraliza-
dores dinâmicos, diretamente nas matrizes do modelo do sistema primário. Desta forma, foi
possível obter o diagrama de Campbell e as respostas em freqüência e ao desbalanceamento
do sistema composto. Os resultados obtidos através desta simulação, se mostraram idênticos
quando comparados aos obtidos através da metodologia proposta.
Verificou-se durante as simulações numéricas, que as propriedades do material viscoelásticoempregado nos protótipos dos neutralizadores, são sensíveis à variação da temperatura. No
presente trabalho, foi realizada uma simulação variando a temperatura para mostrar como a

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 112/147
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 113/147
94
7 SUGESTÕES PARA TRABALHOS FUTUROS
Por envolver diversas áreas de estudo, controle de vibração, material viscoelástico, otimi-
zação e dinâmica de rotores às vezes é necessário desenvolver novas metodologias já que a
literatura existente é fragmentada e escassa para este tipo de aplicação.
As sugestões apresentadas abaixo estão baseadas nas dificuldades encontradas no contexto
do desenvolvimento deste trabalho e nas possibilidades ainda em aberto.
• Desenvolver uma metodologia de cálculo da massa dos neutralizadores no modelo de
espaço de estado.
• Considerar a variação dos parâmetros dos mancais com a rotação.
• Desenvolver um estudo da estabilidade do sistema composto.
• Realizar medições e simulações da amplificação devido ao desbalanceamento e outrostipos de excitação.
• Avaliar as simplificações e hipóteses adotadas, através de validações experimentais.
• Considerar o efeito dos neutralizadores fora da sua direção principal.
• Rever a metodologia empregada na obtenção do diagrama de Campbell do sistema com-
posto.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 114/147
95
REFERÊNCIAS BIBLIOGRÁFICAS
ALAUZE, C.; HAGOPIAN, J. Der; GAUDILLER, L. Active balancing of turbomachinery:Application to large shaft lines. Journal of Vibration and Control, n. 7, p. 249–278, 2001.
ARORA, Jasbir S. Introduction to Optimum Design. San Diego, California, USA: ElsevierAcademic Press, 2004.
BATHE, K. J. Finite Element Procedures. New Jersey, USA.: Prentice Hall, 1996.
BAVASTRI, Carlos Alberto. Redução de Vibrações de Banda Larga em Estruturas Complexas por neutralizadores Vicoelásticos. Tese (Doutorado) — UFSC - Universidade Federal de SantaCatarina, Florianópolis - SC, 1997.
BAVASTRI, Carlos Alberto; FILHO, Francisco José Doubrawa; ESPíNDOLA, José Joãode; LOPES, Eduardo Márcio de Oliveira; VENANCIO, Herbert W. Modelo geral deneutralizadores dinâmicos para controle de vibrações e ruído: Parâmetos equivalentesgeneralizados. Congresso Ibero Latino Americano sobre Métodos Computacionais emEngenharia, 2007.
BAVASTRI, Carlos Alberto; POLLI, M. L.; PRESEZNIAK, Flávio A. Optimal passive
control of self-excitation vibrations in cutting process using viscoelastic dynamic neutralizers.Usinagem 2006 , 2006.
BAZáN, Fermín Sinforiano Viloche; BAVASTRI, Carlos Alberto. An optimized pseudo-inversealgorithm (opia) for multi-input multi-output modal parameter identification. MechanicalSystems and Signal Processing, v. 10, n. 4, p. 365–380, 1996.
CHILDS, Dara. Turbomachinery Rotordynamics. [S.l.]: John Wiley & Sons, Inc., 1993.
CHÁVEZ, Ramiro Germán Díaz. Dinâmica de um Rotor Horizontal em Apoios Elásticos.Dissertação (Mestrado) — Pontifícia Universidade Católica do Rio de Janeiro, 2003.
CLARK, S. L. Dynamics of Continuous Elements. [S.l.]: Prentice-Hall, Inc., 1972.
CRUZ, Gilberto Amado Méndez. Projeto Ótimo de Neutralizadores Viscoelásticos Baseadono Modelo à Derivadas Fracionárias. Tese (Doutorado) — UFSC - Universidade Federal deSanta Catarina, Florianópolis - SC, 2004.
DUNKERLEY, Stanley. On the whirling and vibration of shafts. Philosophical Transactions of the Royal Society of London, 1894.
ERICH, Fredric F. Handbook of Rotordynamics. 2nd.. ed. Florida, USA: Krieger PublishingCompany, 2004.
ESPÍNDOLA, José João de. Controle de Vibração,. 1992. Notas de Aula.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 115/147
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 116/147
Referências Bibliográficas 97
LÓPEZ, Ezequiel José. Dinâmica de Rotores: Modelo Matemático - Realização Prática.Dissertação (Mestrado) — Universidad Nacional del Comahue, 2002.
MARDLE; PASCOE, Sean. An overview of genetic algorithms for the solution of optimisation
problems. CHEER, Computers in Higher Education Economics Review, 1999.
MEIROVITCH, L. Dynamics and Control of Structures. [S.l.]: Wiley Interscience, 1990.
MUSZYNSKA, Agnieszka (Agnes). Rotordynamics. [S.l.]: Taylor & Francis, 2005.
MYKLESTAD, N. O. A new method of calculating natural modes of uncoupled bendingvibration of airplane wings and other types of beams. Journal of Aeronautical Science, v. 2,n. 11, p. 153–162, 1944.
NASHIF, Ahid D.; JONES, David I. G.; HENDERSON, J. P. Vibration Damping. [S.l.]: John
Wiley & Sons, 1985.NISHTALA, Rajesh; VUDUC, Richard; DEMMEL, James; YELICK, Katherine. When cacheblocking sparse matrix vector multiply works and why. In: Proceedings of the PARA’04Workshop on the State-of-the-art in Scientific Computing. Copenhagen, Denmark: [s.n.], 2004.
PRASAD, Dr. F. H. Determination of stiffness of roller bearings – an alter-native approach. IEI - MC , v. 84, n. 4, p. 186–192, JAN 2004. Disponível em:<http://www.ieindia.org/publish/mc/0104/jan04mc9.pdf >.
PRITZ, T. Analysis of four-parameter fractional derivative model of real solid materials. Journal of Sound and Vibration, v. 195, n. 1, p. 103–115, 1996.
PROHL, Melvin A. A general method for calculating the critical speeds of flexible rotors. Applied Mechanics, v. 12, n. 3, p. 142–148, 1945.
RANKINE, W. Centrifugal whirling of shafts. The Engineer , April 1869.
ROGERS, L. Operators and fractional derivatives for viscoelastic constitutive equations. Journal of Rheology, v. 27, p. 351–372, 1983.
SANTOS, Hideraldo Luis Vasconcelos dos. Dinâmica de Rotores: Modelo numéricoconsiderando mancais viscoelásticos. 2003. Trabalho de Conclusão de Curso. (Graduação em
Engenharia Mecânica) - Universidade Federal do Paraná.SCHOENBERG, Ronald. Optimization with the quasi-newton method. Aptech Systems, Inc.,2001.
SILVA, Hilton Penha. Controle Modal de Vibrações por Neutralizadores Dinâmicos: Uma Abordagem Generalizada. Dissertação (Mestrado) — UFSC - Universidade de Santa Catarina,1991.
SMITH, David M. The motion of a rotor carried by a flexible shaft in flexible bearings.Procedings Royal Soc. London, v. 142, p. 92–118, 1933.
SNOWDON, J. C. Steady-state behavior of the dynamic absorber. Journal of AcouusticalSociety of America, v. 38, n. 8, p. 1096–1103, August 1959.
STODOLA, A. Steam and Gas Turbines. New York, USA: Mc Graw-Hill, 1927.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 117/147
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 118/147
99
ANEXO A -- SISTEMA NÃO GIRANTE
Uma vez determinadas as matrizes de massa [ M ] e rigidez [K ] da Equação 2.37, em termos
de coordenadas generalizadas q, obtém-se
[ M ]q(t ) + [C ]q(t ) + [K ]q(t ) = f (t ). Eq. A.1
Considerando nulas a excitação f (t ) = 0 e a matriz de amortecimento [C ] = [0], uma pro-
posta de solução para o sistema poderia ser: q(t ) = φ eiΩt . Aplicando esta proposta e as
considerações na (Equação A.1 ) e definindo: λ Ω2, pode-se chegar ao seguinte conjunto de
problemas de autovalores
[K ][φ ] = [λ ][ M ][φ ]. Eq. A.2
Resolvendo-se este conjunto de problemas, pode-se obter as freqüências naturais através do
elementos da matriz diagonal de autovalores [λ ], e os modos de vibrar das colunas associadas
da matriz de autovetores [φ ]. Obtém-se uma matriz de massa modal ortogonalizada (1), através
da operação, como mostrado em ESPÍNDOLA (1992):
M j
= [φ ]T [ M ][φ ]. Eq. A.3
Pode-se ainda, ortonormalizar a matriz de autovetores [φ ], dividindo cada j-ésima coluna pela
raiz quadrada dos elementos correspondentes da diagonal da matriz m j,√
m j j, obtendo-se
a matriz [Φ].
A matriz de amortecimento pode ser obtida adotando-se um modelo viscoso, proporcional
às matrizes de massa e rigidez, logo
[C ] = [α [ M ] +β [K ]] . Eq. A.4
Sendo assim demonstra-se (ESPÍNDOLA (1992)), que esta matriz de amortecimento, também
pode ser diagonalizada através das matrizes de autovetores
C j
= [ΦT ][C ][Φ]. Eq. A.5
1por definição, para uma matriz ortogonal [ A]: [ A]−1 = [ A]T ⇒ [ A][ A]T = [ I ]
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 119/147
ANEXO A -- Sistema Não Girante 100
Por intermédio da transformação
q(t ) = [Φ] p(t ), Eq. A.6
a Equação A.1 , uma vez pré-multiplicada por [Φ]T , pode ser reescrita como
[Φ]T [ M ][Φ] ¨ p(t )+ [Φ]T [C ][Φ] ˙ p(t ) + [Φ]T [K ][Φ] p(t ) = [Φ]T f (t ). Eq. A.7
Aplicando-se a transformada de Fourier na Equação A.7 tem-se
−Ω2[Φ]T [ M ][Φ] + iΩ[Φ]T [C ][Φ] + [Φ]T [K ][Φ]P(Ω) = [Φ]T F (Ω). Eq. A.8
Pode-se demonstrar (ESPÍNDOLA (1992)) que as matrizes abaixo são diagonais e se reduzem
a
•[Φ]T [ M ][Φ] = [ I ] (matriz identidade [1]).
•[Φ]T [C ][Φ] =2ζ jΩ j
.
•[Φ]T [K ][Φ] =λ j
(Ω2
j =k jm j
).
Aplicando as relações na Equação A.8 , pode-se obter
[ D(Ω)]P(Ω) = [Φ]T F (Ω), Eq. A.9
com
[ D(Ω)] =−Ω2[ I ] + iΩ
2ζ jΩ j
+λ j
. Eq. A.10
Da transformação de variáveis da Equação A.6 , tem-se
Q(Ω)
= [Φ][ D(Ω)]−1[Φ]T F (Ω)
. Eq. A.11
Por definição (Equação 2.100), a função de transferência é a relação entre deslocamento e força
generalizadas (saída/entrada)
[ H (Ω)]
[Φ][ D(Ω)]−1[Φ]T . Eq. A.12
Para se obter uma função resposta em freqüência, pode-se calcular
α ks(Ω) =
N
∑
j = 1
jAks−Ω2 +Ω2 j + i2ζ jΩΩ j
, Eq. A.13
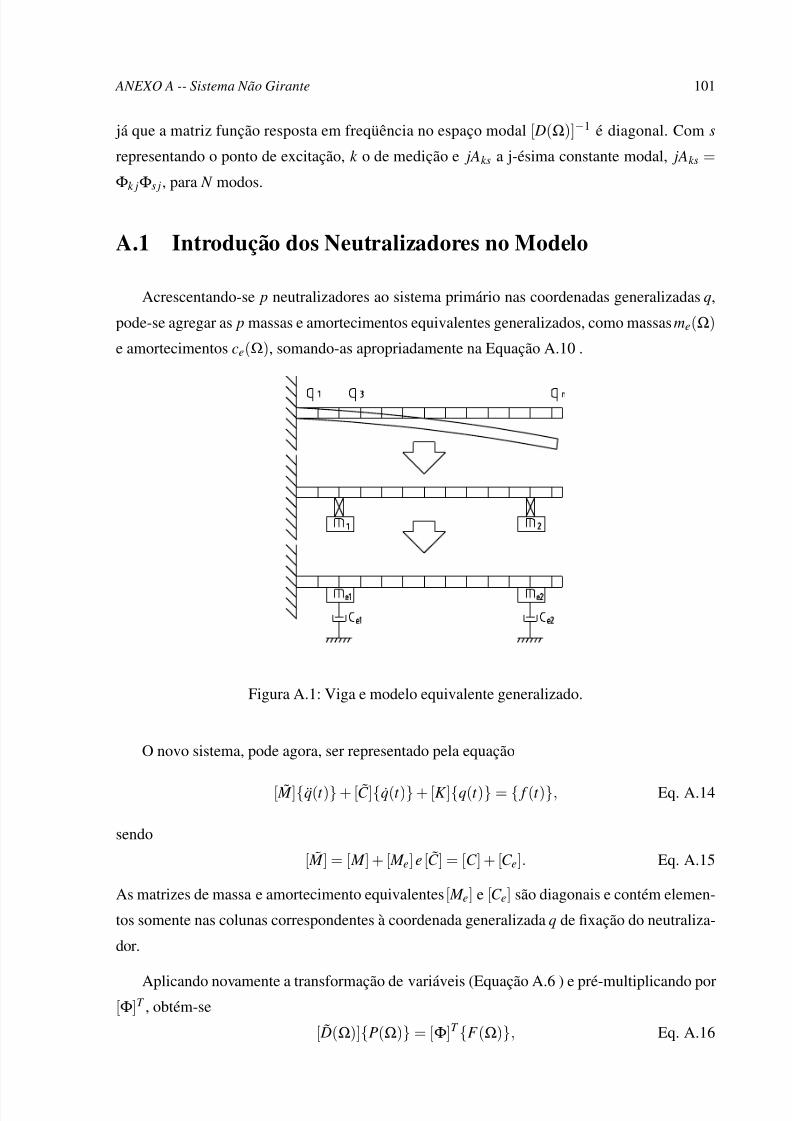
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 120/147
ANEXO A -- Sistema Não Girante 101
já que a matriz função resposta em freqüência no espaço modal [ D(Ω)]−1 é diagonal. Com s
representando o ponto de excitação, k o de medição e jAks a j-ésima constante modal, jAks =
Φk jΦs j, para N modos.
A.1 Introdução dos Neutralizadores no Modelo
Acrescentando-se p neutralizadores ao sistema primário nas coordenadas generalizadas q,
pode-se agregar as p massas e amortecimentos equivalentes generalizados, como massas me(Ω)
e amortecimentos ce(Ω), somando-as apropriadamente na Equação A.10 .
Figura A.1: Viga e modelo equivalente generalizado.
O novo sistema, pode agora, ser representado pela equação
[ ˜ M ]q(t ) + [C ]q(t ) + [K ]q(t ) = f (t ), Eq. A.14
sendo
[ ˜ M ] = [ M ] + [ M e] e [C ] = [C ] + [C e]. Eq. A.15
As matrizes de massa e amortecimento equivalentes [ M e] e [C e] são diagonais e contém elemen-
tos somente nas colunas correspondentes à coordenada generalizada q de fixação do neutraliza-
dor.
Aplicando novamente a transformação de variáveis (Equação A.6 ) e pré-multiplicando por[Φ]T , obtém-se
[ ˜ D(Ω)]P(Ω) = [Φ]T F (Ω), Eq. A.16

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 121/147
ANEXO A -- Sistema Não Girante 102
[ ˜ D(Ω)] =−Ω2 [ I ] + [Φ]T [ M e][Φ]
+ iΩ
2ζ jΩ j
+ [Φ]T [C e][Φ]
+λ j
. Eq. A.17
Um sistema muito discretizado pode apresentar centenas e até milhares de graus de liberdade.
Normalmente se trabalha apenas com o primeiros n autovalores e autovetores, que representamos modos dentro da faixa de freqüência de interesse. As vezes se trabalha com alguns poucos
modos, dentro da faixa de interesse, e dois modos residuais, inferior e superior, que representam
os modos anteriores e posteriores à faixa de interesse. Então, é possível utilizar somente as
primeiras colunas da matriz de autovetores: [Φ] = [Φ]n×n para obtenção das novas matrizes
adicionais de massa:
[ ˆ M ] = [Φ]T [ ˜ M ][Φ], Eq. A.18
e de amortecimento
[C ] = [Φ]T [C ][Φ], Eq. A.19
sendo n× n a dimensão final destas matrizes.
Note-se que essas novas matrizes “não” são diagonais, já que o modelo dos neutralizadores
foi acrescentado “sobre” a matriz de autovetores do sistema primário. Isto implica em que
os modos não são ortogonais em relação à matrizes que não estavam presentes quando foram
geradas.
Considera-se com base em SILVA (1991), no entanto, que estas matrizes são “predominan-temente” diagonais. Esta consideração simplificadora levou à definição de uma metodologia de
projeto ótimo de neutralizadores, como é mostrado à seguir, mas na realidade, as matrizes não
são rigorosamente predominantes, para quaisquer conjuntos de neutralizadores.
Obtém-se um novo sistema de equações “truncado” para o número de modos, apropriado
para o sistema em estudo
[ ˆ D(Ω)]P(Ω) = [Φ]T F (Ω). Eq. A.20
O vetor de coordenadas principais pode ser obtido a partir da seguinte equação
P(Ω) =
[ ˆ D(Ω)]−1[Φ]T F (Ω), Eq. A.21
[ ˆ D(Ω)] =−Ω2 [ ˆ I ] + [ ˆ M e]
+ iΩ
ˆ
2ζ jΩ j
+ [C e]
+ ˆλ j
. Eq. A.22
com
[ ˆ M e] =
[Φ]T [ M e][Φ]
e [C e] =
[Φ]T [C e][Φ]
. Eq. A.23
Na Figura A.2, pode-se observar funções resposta em freqüência para as coordenadas principais
P(Ω), dos cinco primeiros modos de um sistema, onde é possível identificar o acoplamento
modal introduzido pela presença de dois neutralizadores projetados para o segundo e terceiros
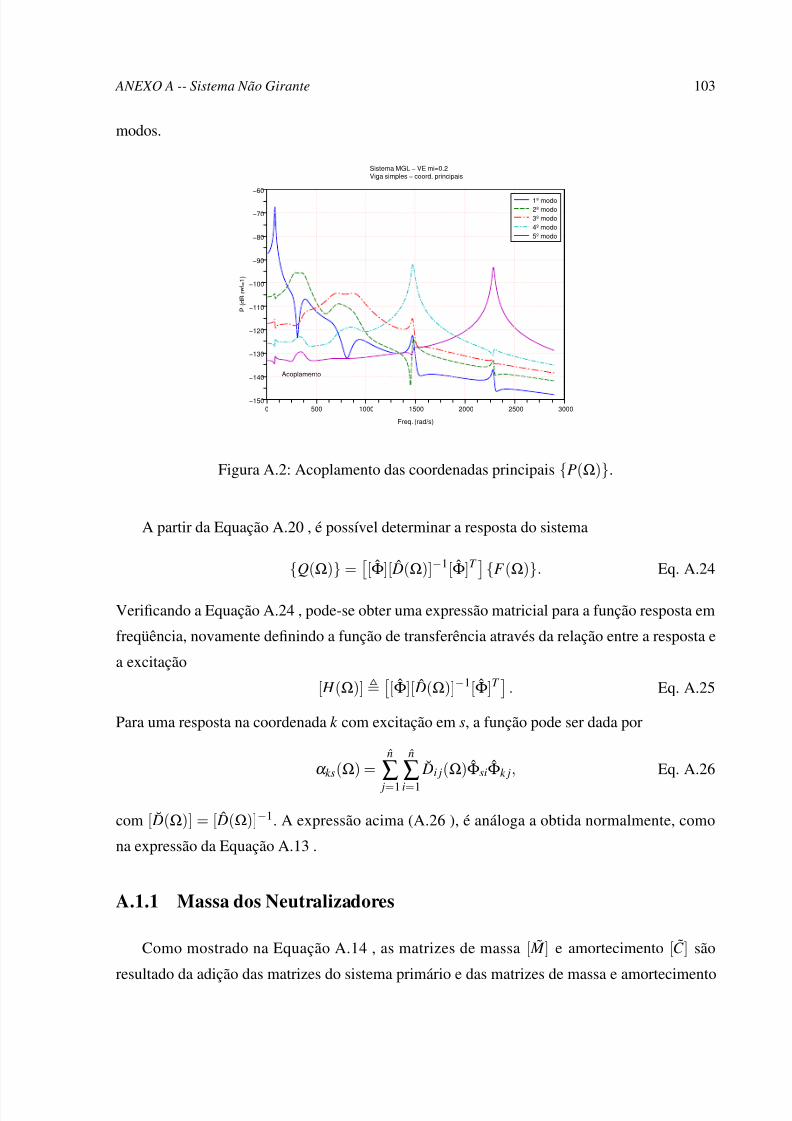
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 122/147
ANEXO A -- Sistema Não Girante 103
modos.
Acoplamento
0 500 1000 1500 2000 2500 3000
−150
−140
−130
−120
−110
−100
−90
−80
−70
−60
Sistema MGL − VE mi=0.2Viga simples − coord. principais
Freq. (rad/s)
P ( d
B r
e f = 1 )
1º modo
2º modo
3º modo
4º modo
5º modo
Figura A.2: Acoplamento das coordenadas principais P(Ω).
A partir da Equação A.20 , é possível determinar a resposta do sistema
Q(Ω) = [Φ][ ˆ D(Ω)]−1[Φ]T F (Ω). Eq. A.24
Verificando a Equação A.24 , pode-se obter uma expressão matricial para a função resposta em
freqüência, novamente definindo a função de transferência através da relação entre a resposta e
a excitação
[ H (Ω)]
[Φ][ ˆ D(Ω)]−1[Φ]T . Eq. A.25
Para uma resposta na coordenada k com excitação em s, a função pode ser dada por
α ks(Ω) =n
∑ j=1
n
∑i=1
˘ Di j(Ω)ΦsiΦk j, Eq. A.26
com [ ˘ D(Ω)] = [ ˆ D(Ω)]−1. A expressão acima (A.26 ), é análoga a obtida normalmente, como
na expressão da Equação A.13 .
A.1.1 Massa dos Neutralizadores
Como mostrado na Equação A.14 , as matrizes de massa [ ˜ M ] e amortecimento [C ] são
resultado da adição das matrizes do sistema primário e das matrizes de massa e amortecimento
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 123/147

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 124/147
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 125/147
ANEXO A -- Sistema Não Girante 106
A.2 Otimização Multi-Modal
Em um sistema com múltiplos graus de liberdade, é possível calcular neutralizadores vi-
sando atenuar um ou mais modos específicos. Existem duas aproximações possíveis:
1. Modo a modo: Neste caso assume-se que o desacoplamento é total. Os neutralizadores
podem então, ser projetados modo a modo, utilizando a técnica dos pontos fixos, por
exemplo. No entanto, a premissa básica, como mostrado na Figura A.2, não pode ser sa-
tisfeita e o desempenho do sistema auxiliar pode ser afetado. Esta técnica é recomendada
para sistemas com modos bem separados e definidos.
2. Banda larga: Projetam-se os neutralizadores simultaneamente, considerando a resposta
sistema para n modos, através da utilização de uma técnica de otimização não linear,
buscando a minimização de uma função objetivo. Normalmente se trabalha com um
vetor projeto contendo as freqüências naturais dos neutralizadores e o amortecimento do
neutralizador, uma vez a massa fixada através da Equação A.30 , por exemplo. Quando
o neutralizador é construído com material viscoelástico, somente as freqüências naturais
são suficientes para a determinação das características físicas dos neutralizadores através
da Equação 2.104.
O resultado obtido depende em grande parte, da escolha correta da posição dos neutralizadores
e da função objetivo.
Para a otimização, as matrizes de massa e amortecimento equivalentes, são montadas e
somadas aos parâmetros modais do sistema primário, previamente estabelecidos, para cada
freqüência na faixa adotada e com o número de modos n, escolhido.
Dentro da faixa de freqüências é buscado o máximo para a n-ésima coordenada principalmodal escolhida a ser controlada. Ao final, retorna ao otimizador, a “norma 2” do vetor de
máximos calculados.
Abaixo a função resposta em freqüência dos cinco primeiros modos de um sistema, ao
qual foram acrescentados dois neutralizadores projetados para o segundo e terceiros modos
utilizando a função objetivo proposta por BAVASTRI (1997).
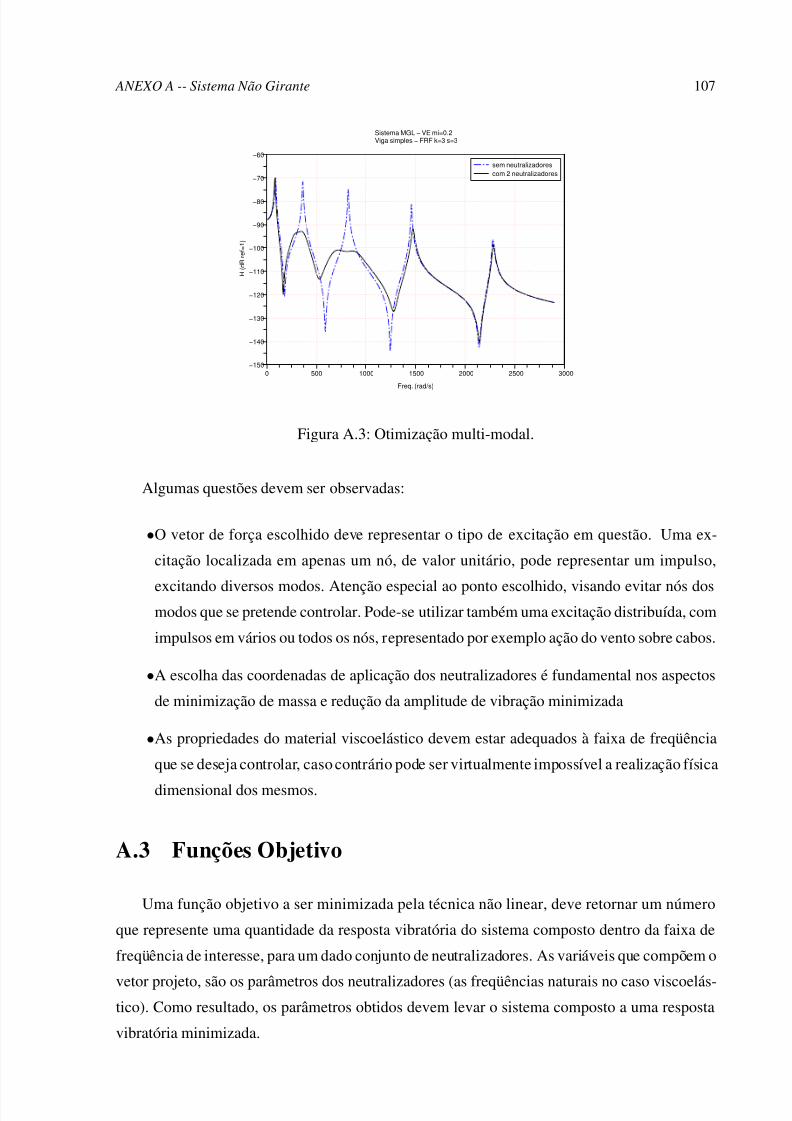
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 126/147
ANEXO A -- Sistema Não Girante 107
0 500 1000 1500 2000 2500 3000
−150
−140
−130
−120
−110
−100
−90
−80
−70
−60
Sistema MGL − VE mi=0.2Viga simples − FRF k=3 s=3
Freq. (rad/s)
H (
d B r
e f = 1 )
sem neutralizadores
com 2 neutralizadores
Figura A.3: Otimização multi-modal.
Algumas questões devem ser observadas:
•O vetor de força escolhido deve representar o tipo de excitação em questão. Uma ex-
citação localizada em apenas um nó, de valor unitário, pode representar um impulso,
excitando diversos modos. Atenção especial ao ponto escolhido, visando evitar nós dosmodos que se pretende controlar. Pode-se utilizar também uma excitação distribuída, com
impulsos em vários ou todos os nós, representado por exemplo ação do vento sobre cabos.
•A escolha das coordenadas de aplicação dos neutralizadores é fundamental nos aspectos
de minimização de massa e redução da amplitude de vibração minimizada
•As propriedades do material viscoelástico devem estar adequados à faixa de freqüência
que se deseja controlar, caso contrário pode ser virtualmente impossível a realização física
dimensional dos mesmos.
A.3 Funções Objetivo
Uma função objetivo a ser minimizada pela técnica não linear, deve retornar um número
que represente uma quantidade da resposta vibratória do sistema composto dentro da faixa de
freqüência de interesse, para um dado conjunto de neutralizadores. As variáveis que compõem o
vetor projeto, são os parâmetros dos neutralizadores (as freqüências naturais no caso viscoelás-tico). Como resultado, os parâmetros obtidos devem levar o sistema composto a uma resposta
vibratória minimizada.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 127/147
ANEXO A -- Sistema Não Girante 108
O sistema primário é representado através de suas matrizes de autovalores [λ ], constantes
de amortecimento [ζ ] (ou fatores de perda [η]) e autovetores normalizados à esquerda [Ψ] e à
direita [Θ]. Estas matrizes podem ser obtidas de distintas maneiras, normalmente através de
algum software de elementos finitos ou alguma técnica de identificação (análise modal), da
estrutura que se deseja modificar.
BAVASTRI (1997) propôs a minimização da função objetivo “norma 2”, do vetor de má-
ximos modais das coordenadas principais reduzidas P(Ω), em uma certa faixa de freqüên-
cias. A otimização é máxima como pretendido, sobre as coordenadas principais, o que pode
ser comprovado pela análise qualitativa do gráfico (A.2), já que os picos tem a mesma ampli-
tude (HARTOG (1956)). O resultado na função resposta em freqüência pode ser ligeiramente
diferente.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 128/147
109
ANEXO B -- ALGORITMOS DE OTIMIZAÇÃO
B.1 “Quasi-Newton”
Segundo SCHOENBERG (2001) os extremos de uma função f ( x) são caracterizados pelaanulação da sua derivada f ( x) = 0. Em funções com múltiplas variáveis pode não haver solução
direta. Newton propôs uma solução iterativa: a partir de uma condição inicial, faz-se uma
aproximação quadrática da função através da série de Taylor para uma máximo local xm, faz-se
a diferenciação e iguala-se a zero, calculando o ponto de máximo local. Faz-se deste ponto, a
nova condição inicial e assim sucessivamente
f ( x) = f ( xm) + f ( xm)( x− xm) +12
f ( xm)( x− xm)2. Eq. B.1
Derivando em relação à ( x− xm) e igualando a zero (0)
f ( x) = f ( xm) + f (Ω xm)( x− xm) = 0, Eq. B.2
obtém-se
x = xm − [ f ( xm)]−1 f ( xm), Eq. B.3
faz-se novamente xm = x, até que seja atingido uma tolerância | xm − x| tol.
Generalizando: xm+1 = xm −δ m, Eq. B.4
com
δ m = [ f ( xm)]−1 f ( xm) = H −1m gm, Eq. B.5
δ m é denominado direção, sendo um vetor que representa um segmento do caminho do
ponto inicial até o ponto solução, com o inverso do “Hessiano” H m determinando o ângulo e o
gradiente gm seu tamanho.
A função para o cálculo do Hessiano geralmente não está determinada, porém pode ser
estimada:
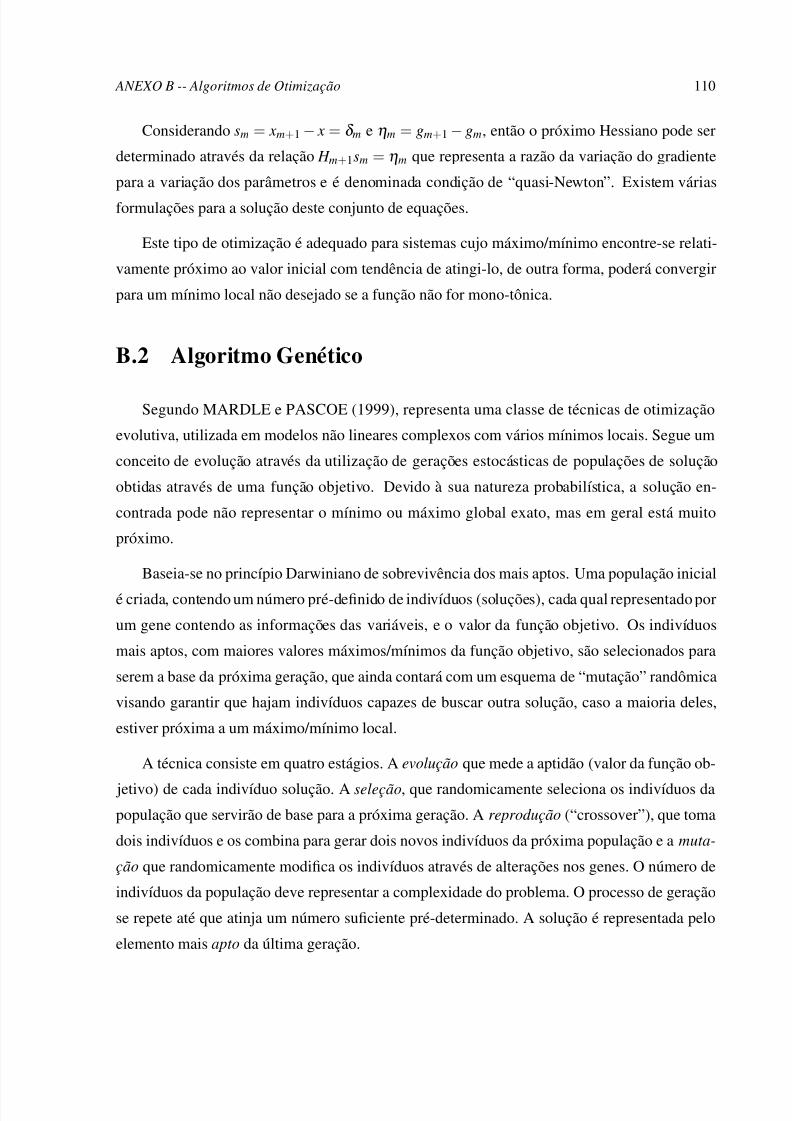
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 129/147
ANEXO B -- Algoritmos de Otimização 110
Considerando sm = xm+1 − x = δ m e ηm = gm+1 − gm, então o próximo Hessiano pode ser
determinado através da relação H m+1sm = ηm que representa a razão da variação do gradiente
para a variação dos parâmetros e é denominada condição de “quasi-Newton”. Existem várias
formulações para a solução deste conjunto de equações.
Este tipo de otimização é adequado para sistemas cujo máximo/mínimo encontre-se relati-
vamente próximo ao valor inicial com tendência de atingi-lo, de outra forma, poderá convergir
para um mínimo local não desejado se a função não for mono-tônica.
B.2 Algoritmo Genético
Segundo MARDLE e PASCOE (1999), representa uma classe de técnicas de otimização
evolutiva, utilizada em modelos não lineares complexos com vários mínimos locais. Segue um
conceito de evolução através da utilização de gerações estocásticas de populações de solução
obtidas através de uma função objetivo. Devido à sua natureza probabilística, a solução en-
contrada pode não representar o mínimo ou máximo global exato, mas em geral está muito
próximo.
Baseia-se no princípio Darwiniano de sobrevivência dos mais aptos. Uma população inicial
é criada, contendo um número pré-definido de indivíduos (soluções), cada qual representado por
um gene contendo as informações das variáveis, e o valor da função objetivo. Os indivíduos
mais aptos, com maiores valores máximos/mínimos da função objetivo, são selecionados para
serem a base da próxima geração, que ainda contará com um esquema de “mutação” randômica
visando garantir que hajam indivíduos capazes de buscar outra solução, caso a maioria deles,
estiver próxima a um máximo/mínimo local.
A técnica consiste em quatro estágios. A evolução que mede a aptidão (valor da função ob-
jetivo) de cada indivíduo solução. A seleção, que randomicamente seleciona os indivíduos dapopulação que servirão de base para a próxima geração. A reprodução (“crossover”), que toma
dois indivíduos e os combina para gerar dois novos indivíduos da próxima população e a muta-
ção que randomicamente modifica os indivíduos através de alterações nos genes. O número de
indivíduos da população deve representar a complexidade do problema. O processo de geração
se repete até que atinja um número suficiente pré-determinado. A solução é representada pelo
elemento mais apto da última geração.
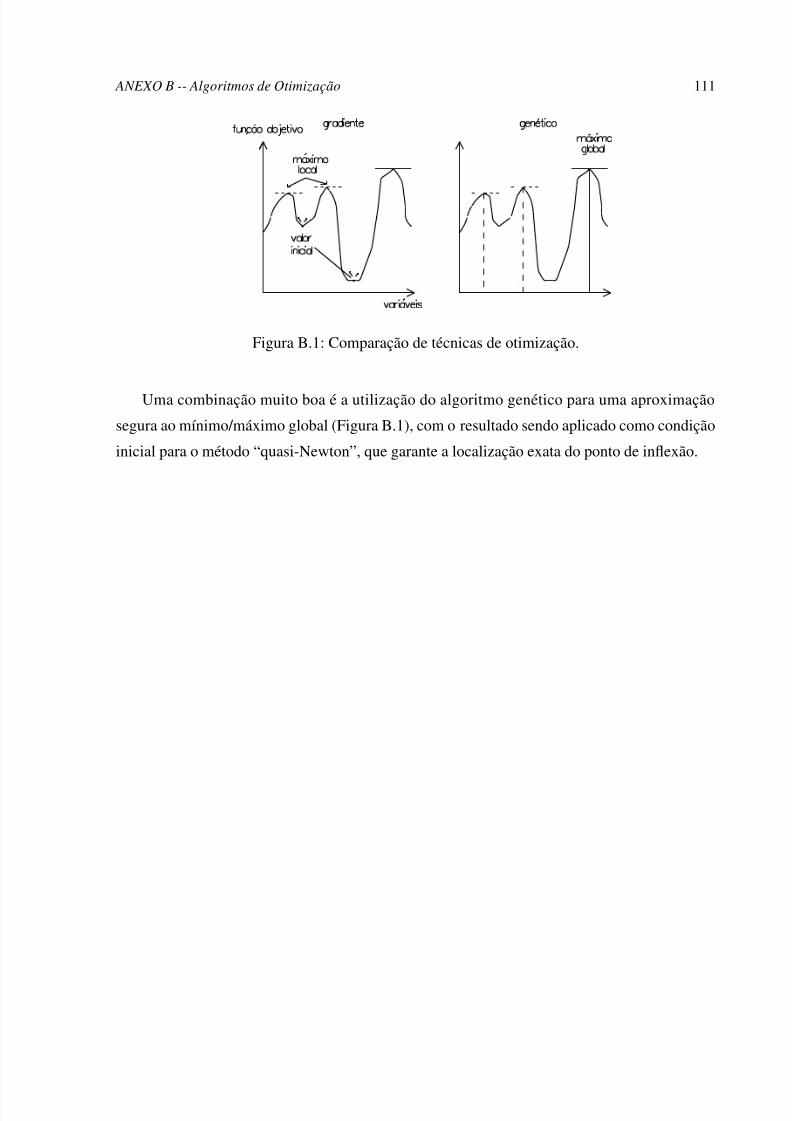
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 130/147
ANEXO B -- Algoritmos de Otimização 111
Figura B.1: Comparação de técnicas de otimização.
Uma combinação muito boa é a utilização do algoritmo genético para uma aproximação
segura ao mínimo/máximo global (Figura B.1), com o resultado sendo aplicado como condição
inicial para o método “quasi-Newton”, que garante a localização exata do ponto de inflexão.
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 131/147
112
ANEXO C -- MANCAIS DE ROLAMENTO
C.1 Rigidez
Segundo ERICH (2004), mancais de rolamento são utilizados em muitas classes de máqui-
nas rotativas onde são requeridos pequeno tamanho e alta capacidade de carga da rotação zero
até a nominal. Devido à sua construção, nos rolamentos sempre há contato de entre as pistas e o
elemento de rolamento, não apresentam amortecimento interno intrínseco e devem ser projeta-
dos com folga radial. O deslocamento entre os centros das pistas é constituído por três parcelas
distintas (Figura C.1):
A folga radial δ c (constante).
A compressão dos elementos girantes δ h (depende da carga).A ovalização da pista devido à distribuição de carga δ o (depende da carga).
A rigidez é obtida da razão da carga aplicada F a pelo deslocamento total
k r =F a
(δ c +δ h +δ o). Eq. C.1
Figura C.1: Deflexão devido compressão dos elementos.
Para um rolamento típico, (ERICH (2004)) apresenta um valor de rigidez de aproximada-
mente 300E 6( N /m), outro autor (PRASAD (2004)) apresenta valores da ordem de 1E 9 ( N /m).
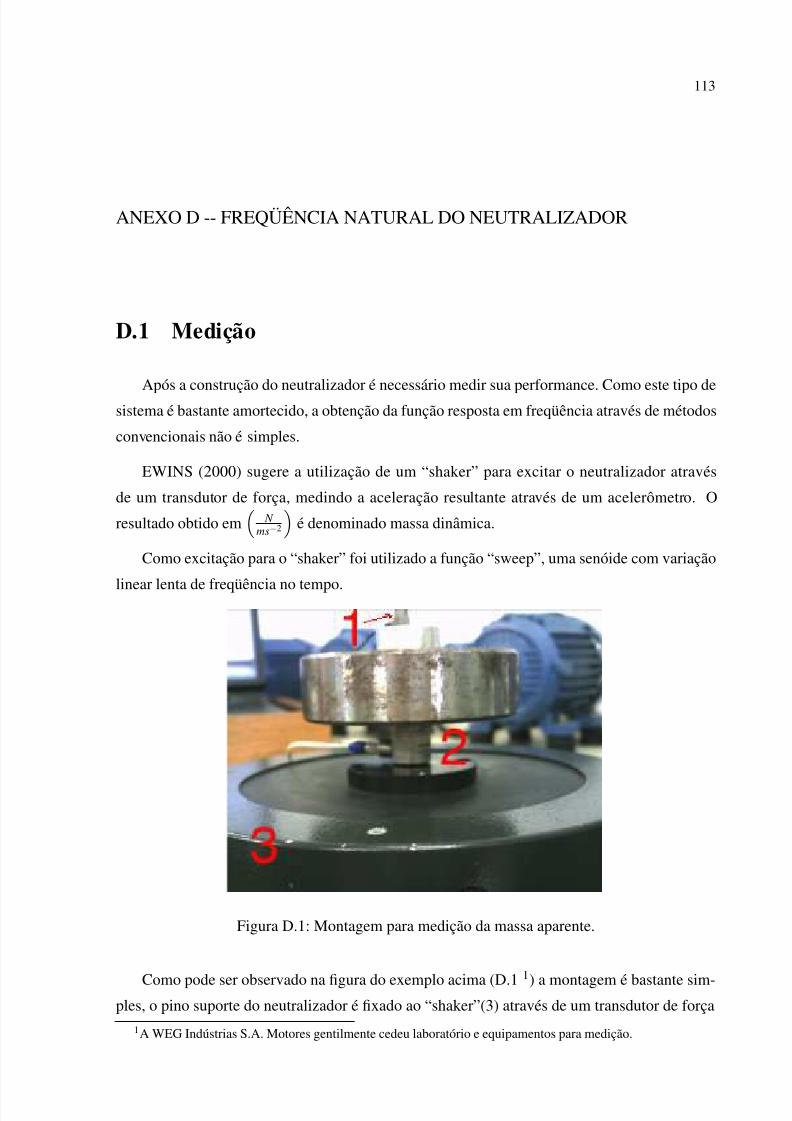
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 132/147
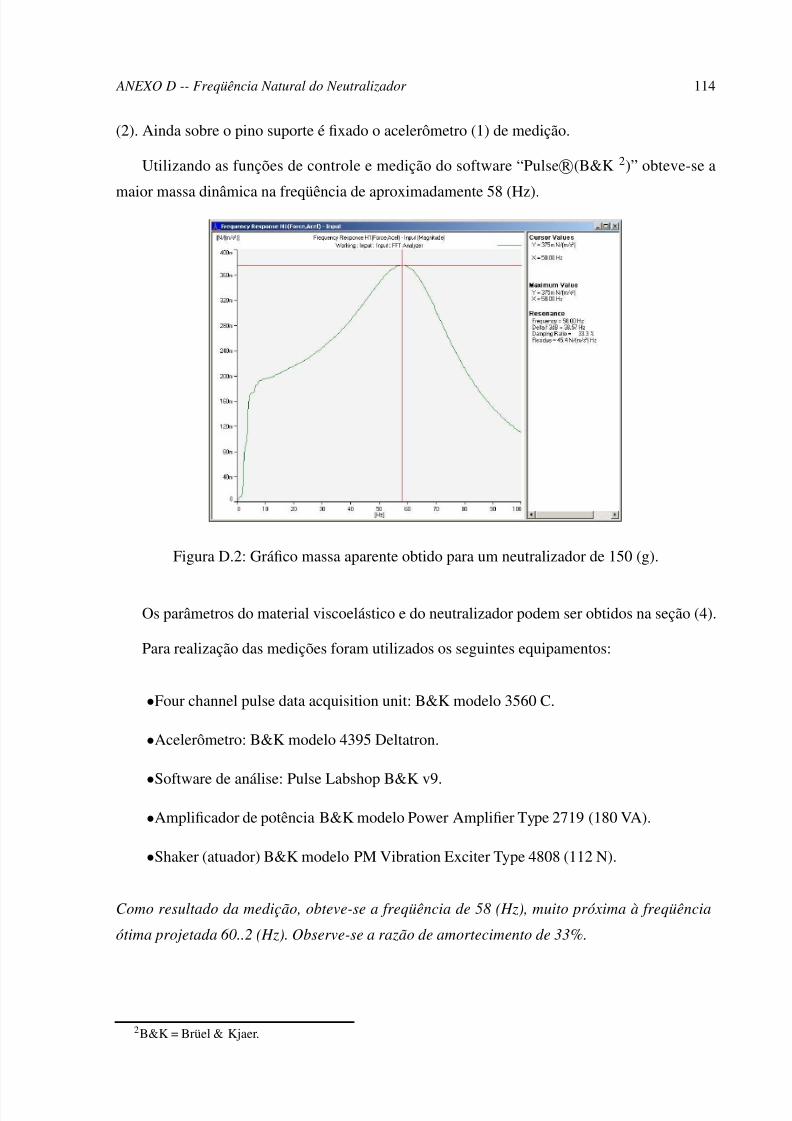
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 133/147
ANEXO D -- Freqüência Natural do Neutralizador 114
(2). Ainda sobre o pino suporte é fixado o acelerômetro (1) de medição.
Utilizando as funções de controle e medição do software “Pulse R(B&K 2)” obteve-se a
maior massa dinâmica na freqüência de aproximadamente 58 (Hz).
Figura D.2: Gráfico massa aparente obtido para um neutralizador de 150 (g).
Os parâmetros do material viscoelástico e do neutralizador podem ser obtidos na seção (4).
Para realização das medições foram utilizados os seguintes equipamentos:
•Four channel pulse data acquisition unit: B&K modelo 3560 C.
•Acelerômetro: B&K modelo 4395 Deltatron.
•Software de análise: Pulse Labshop B&K v9.
•Amplificador de potência B&K modelo Power Amplifier Type 2719 (180 VA).
•Shaker (atuador) B&K modelo PM Vibration Exciter Type 4808 (112 N).
Como resultado da medição, obteve-se a freqüência de 58 (Hz), muito próxima à freqüência
ótima projetada 60..2 (Hz). Observe-se a razão de amortecimento de 33%.
2B&K = Brüel & Kjaer.
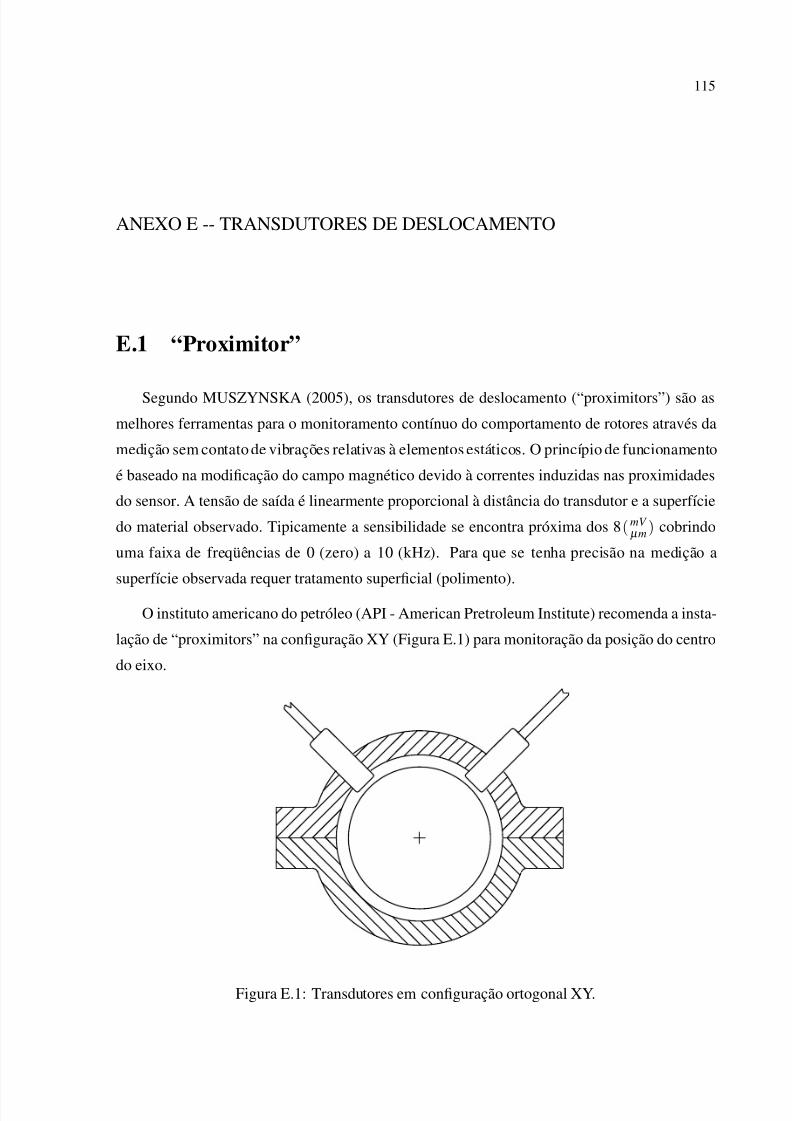
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 134/147
115
ANEXO E -- TRANSDUTORES DE DESLOCAMENTO
E.1 “Proximitor”
Segundo MUSZYNSKA (2005), os transdutores de deslocamento (“proximitors”) são asmelhores ferramentas para o monitoramento contínuo do comportamento de rotores através da
medição sem contato de vibrações relativas à elementos estáticos. O princípio de funcionamento
é baseado na modificação do campo magnético devido à correntes induzidas nas proximidades
do sensor. A tensão de saída é linearmente proporcional à distância do transdutor e a superfície
do material observado. Tipicamente a sensibilidade se encontra próxima dos 8 ( mV µ m ) cobrindo
uma faixa de freqüências de 0 (zero) a 10 (kHz). Para que se tenha precisão na medição a
superfície observada requer tratamento superficial (polimento).
O instituto americano do petróleo (API - American Pretroleum Institute) recomenda a insta-
lação de “proximitors” na configuração XY (Figura E.1) para monitoração da posição do centro
do eixo.
Figura E.1: Transdutores em configuração ortogonal XY.
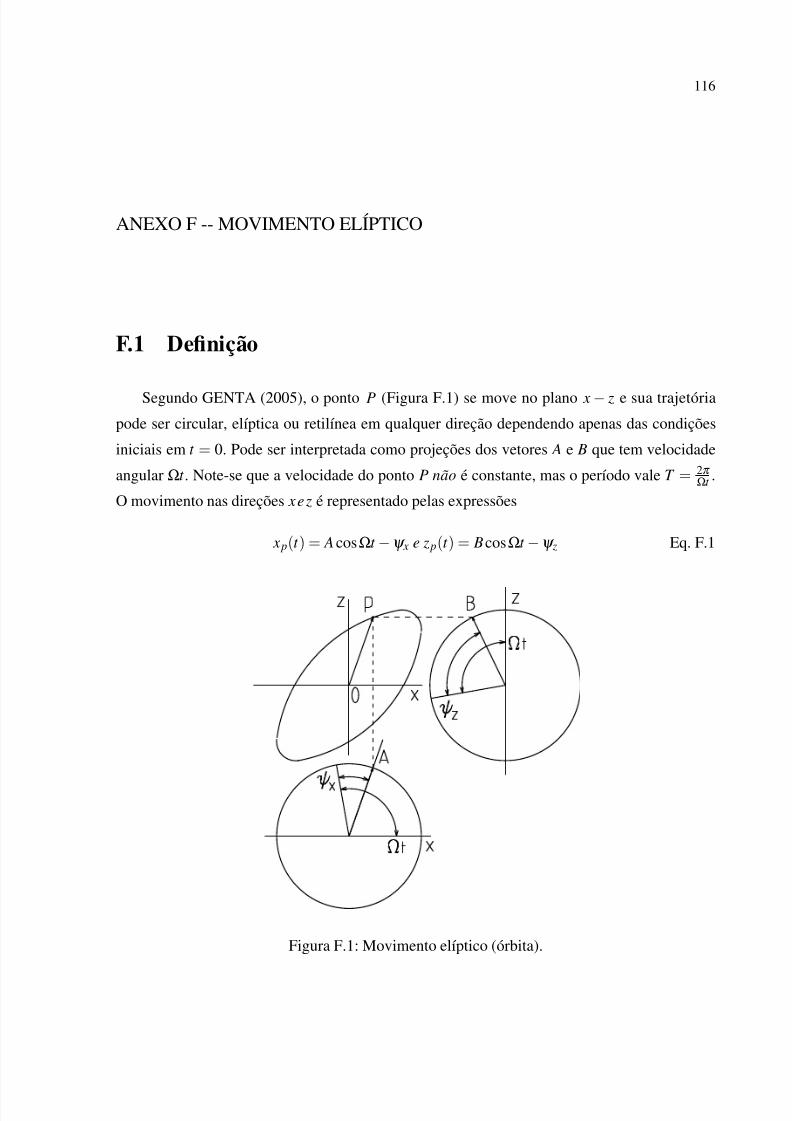
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 135/147
116
ANEXO F -- MOVIMENTO ELÍPTICO
F.1 Definição
Segundo GENTA (2005), o ponto P (Figura F.1) se move no plano x − z e sua trajetóriapode ser circular, elíptica ou retilínea em qualquer direção dependendo apenas das condições
iniciais em t = 0. Pode ser interpretada como projeções dos vetores A e B que tem velocidade
angular Ωt . Note-se que a velocidade do ponto P não é constante, mas o período vale T = 2π Ωt .
O movimento nas direções xez é representado pelas expressões
x p(t ) = A cosΩt −ψ x e z p(t ) = BcosΩt −ψ z Eq. F.1
Figura F.1: Movimento elíptico (órbita).
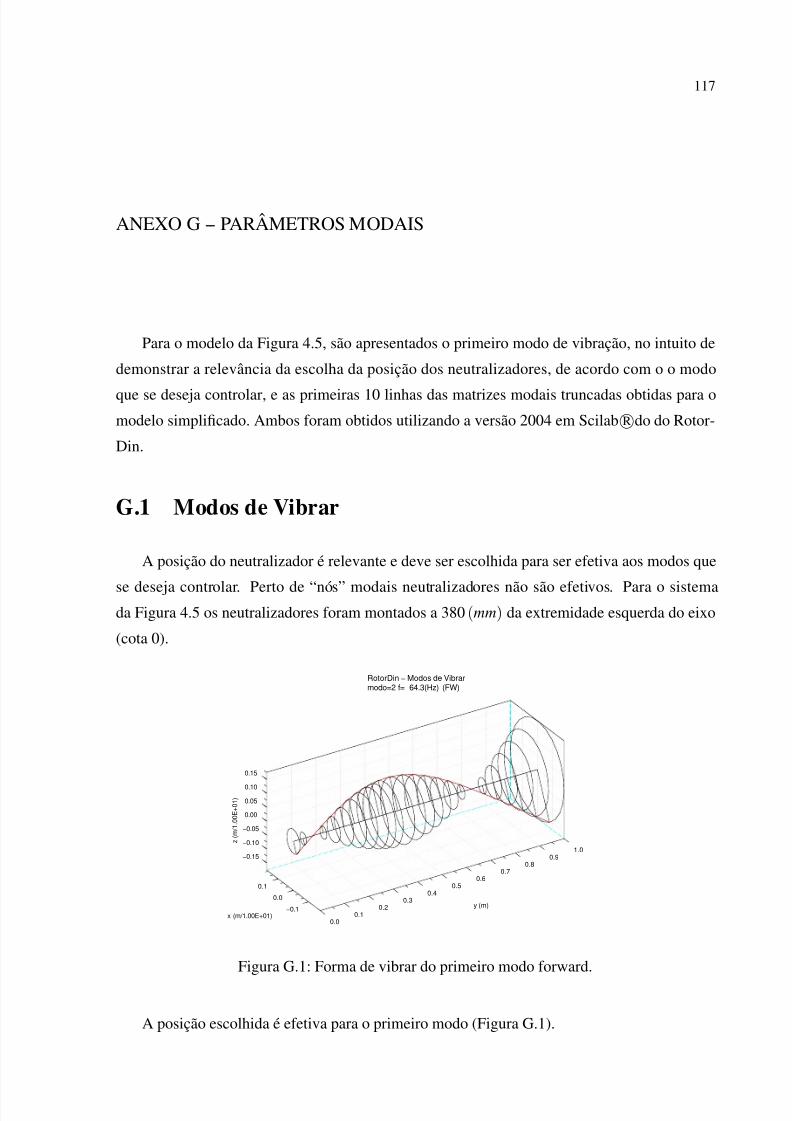
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 136/147
117
ANEXO G -- PARÂMETROS MODAIS
Para o modelo da Figura 4.5, são apresentados o primeiro modo de vibração, no intuito de
demonstrar a relevância da escolha da posição dos neutralizadores, de acordo com o o modo
que se deseja controlar, e as primeiras 10 linhas das matrizes modais truncadas obtidas para omodelo simplificado. Ambos foram obtidos utilizando a versão 2004 em Scilab Rdo do Rotor-
Din.
G.1 Modos de Vibrar
A posição do neutralizador é relevante e deve ser escolhida para ser efetiva aos modos que
se deseja controlar. Perto de “nós” modais neutralizadores não são efetivos. Para o sistemada Figura 4.5 os neutralizadores foram montados a 380 (mm) da extremidade esquerda do eixo
(cota 0).
RotorDin − Modos de Vibrarmodo=2 f= 64.3(Hz) (FW)
−0.15
−0.10
−0.05
0.00
0.05
0.10
0.15
z ( m / 1 . 0
0 E + 0 1 )
0.00.1
0.20.3
0.40.5
0.60.7
0.80.9
1.0
y (m)−0.1
0.0
0.1
x (m/1.00E+01)
Figura G.1: Forma de vibrar do primeiro modo forward.
A posição escolhida é efetiva para o primeiro modo (Figura G.1).
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 137/147
ANEXO G -- Parâmetros Modais 118
G.1.1 Matriz [Φ] Complexa e Truncada 10×4
.
( 1.97E-03+i3.89E-03) ( 9.44E-04+i4.29E-03) ( 4.10E-03+i1.29E-03) (-3.84E-03-i1.97E-03)( 3.89E-03-i1.97E-03) ( 4.29E-03-i9.44E-04) (-1.29E-03+i4.10E-03) ( 1.97E-03-i3.84E-03)
(-4.90E-02+i2.48E-02) (-5.40E-02+i1.19E-02) ( 1.62E-02-i5.14E-02) (-2.48E-02+i4.81E-02)
( 2.48E-02+i4.90E-02) ( 1.19E-02+i5.40E-02) ( 5.14E-02+i1.62E-02) (-4.81E-02-i2.48E-02)
( 9.82E-04+i1.94E-03) ( 4.70E-04+i2.14E-03) ( 2.04E-03+i6.42E-04) (-1.91E-03-i9.83E-04)
( 1.94E-03-i9.82E-04) ( 2.14E-03-i4.70E-04) (-6.42E-04+i2.04E-03) ( 9.83E-04-i1.91E-03)
(-4.87E-02+i2.47E-02) (-5.37E-02+i1.18E-02) ( 1.61E-02-i5.13E-02) (-2.47E-02+i4.80E-02)
( 2.47E-02+i4.87E-02) ( 1.18E-02+i5.37E-02) ( 5.13E-02+i1.61E-02) (-4.80E-02-i2.47E-02)
(-1.35E-06-i2.69E-06) (-6.63E-07-i2.96E-06) (-2.88E-06-i8.95E-07) ( 2.69E-06+i1.40E-06)
(-2.69E-06+i1.35E-06) (-2.96E-06+i6.63E-07) ( 8.94E-07-i2.88E-06) (-1.40E-06+i2.69E-06)
G.1.2 Matriz [Ψ] Complexa Truncada 10×4
.( 3.88E-03+i1.97E-03) (-4.22E-03-i9.27E-04) (-1.30E-03-i4.11E-03) (-1.96E-03-i3.82E-03)
(-1.97E-03+i3.88E-03) ( 9.27E-04-i4.22E-03) (-4.11E-03+i1.30E-03) (-3.82E-03+i1.96E-03)
( 2.48E-02-i4.88E-02) (-1.17E-02+i5.31E-02) ( 5.16E-02-i1.63E-02) ( 4.79E-02-i2.46E-02)
( 4.88E-02+i2.48E-02) (-5.31E-02-i1.17E-02) (-1.63E-02-i5.16E-02) (-2.46E-02-i4.79E-02)
( 1.93E-03+i9.79E-04) (-2.10E-03-i4.61E-04) (-6.46E-04-i2.05E-03) (-9.77E-04-i1.90E-03)(-9.79E-04+i1.93E-03) ( 4.61E-04-i2.10E-03) (-2.05E-03+i6.47E-04) (-1.90E-03+i9.77E-04)
( 2.46E-02-i4.85E-02) (-1.16E-02+i5.28E-02) ( 5.15E-02-i1.62E-02) ( 4.78E-02-i2.45E-02)
( 4.85E-02+i2.46E-02) (-5.28E-02-i1.16E-02) (-1.62E-02-i5.15E-02) (-2.45E-02-i4.78E-02)
(-2.67E-06-i1.37E-06) ( 2.91E-06+i6.28E-07) ( 9.22E-07+i2.89E-06) ( 1.37E-06+i2.69E-06)
( 1.37E-06-i2.67E-06) (-6.28E-07+i2.91E-06) ( 2.89E-06-i9.22E-07) ( 2.69E-06-i1.37E-06)
G.1.3 Matriz [Λ] Complexa Truncada 4 ×4
.( 1.68E+00+i3.99E+02) (0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00)
(0.00E+00-i0.00E+00) ( 1.68E+00-i3.99E+02) (0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00)
(0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00) ( 1.70E+00-i4.04E+02) (0.00E+00-i0.00E+00)
(0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00) (0.00E+00-i0.00E+00) ( 1.70E+00+i4.04E+02)
Pode-se observar a esperada ocorrência de pares conjugados.
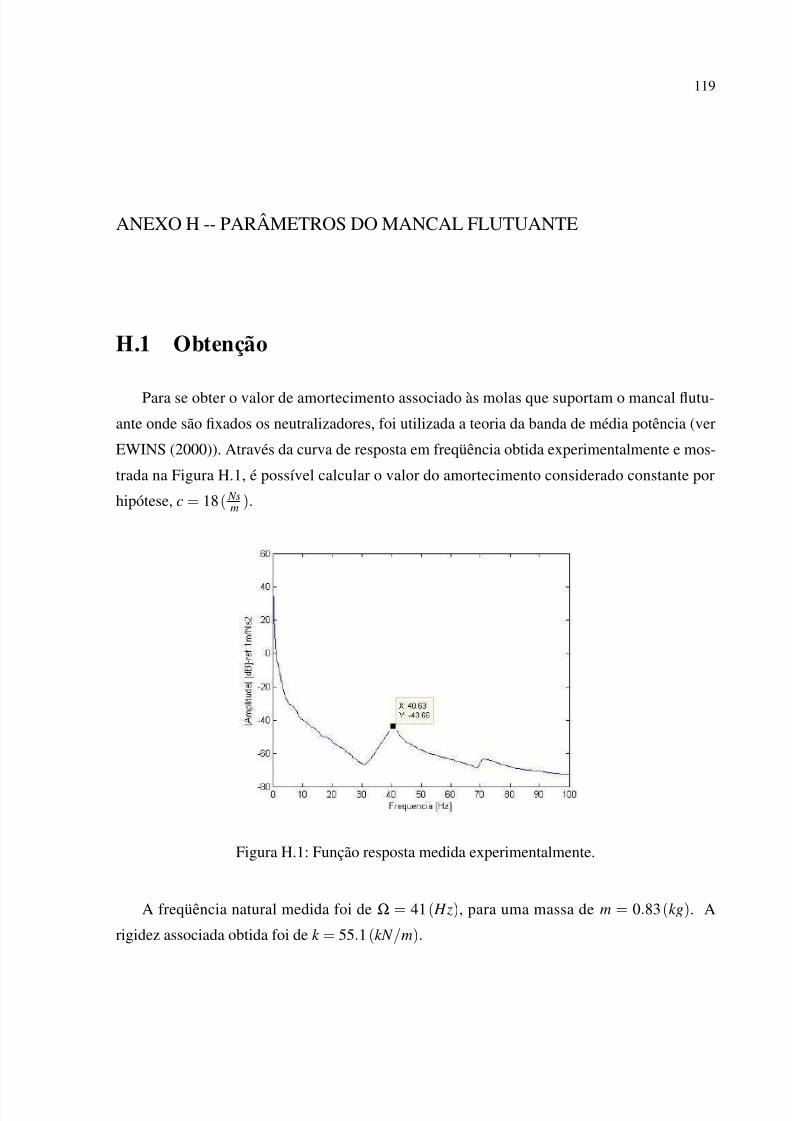
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 138/147
119
ANEXO H -- PARÂMETROS DO MANCAL FLUTUANTE
H.1 Obtenção
Para se obter o valor de amortecimento associado às molas que suportam o mancal flutu-ante onde são fixados os neutralizadores, foi utilizada a teoria da banda de média potência (ver
EWINS (2000)). Através da curva de resposta em freqüência obtida experimentalmente e mos-
trada na Figura H.1, é possível calcular o valor do amortecimento considerado constante por
hipótese, c = 18( Nsm ).
Figura H.1: Função resposta medida experimentalmente.
A freqüência natural medida foi de Ω = 41( Hz), para uma massa de m = 0.83(kg). A
rigidez associada obtida foi de k = 55.1 (kN /m).
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 139/147
120
ANEXO I -- EQUIPAMENTOS DE MEDIÇÃO
I.1 Analisador de Sinais
Para medição no domínio da freqüência foi utilizado uma analisador de sinais da marcaHP (Hewlett-Packard) modelo 3560A (Figura I.1), portátil, dois canais, FFT1, fonte de corrente
integrada. As principais características de desempenho são (h t t p : / / w w w . m e t r i c t e s t . c o m
):
•Faixa de freqüência: 0.03125 (Hz) a 40 (kHz)
•Precisão em freqüência: ± 8 (Hz)
•Precisão em amplitude:
±0.2 dB
•Resolução de largura de banda: 0.03125 a 400 (Hz)
•Nível de ruído médio: -100 (dBv)
Figura I.1: Analisador HP 3560A.
1Fast Fourier Transform

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 140/147
ANEXO I -- Equipamentos de Medição 121
I.2 Martelo Instrumentado
Para o teste de resposta em freqüência em repouso foi utilizado um martelo instrumentado
fabricado pela PCB, modelo 086C04, “Modally Tuned RImpulse Hammer w/force sensor” (Fi-
gura I.2). As principais características são:
•Sensibilidade: (±15%) 1.1 (mV/N)
•Faixa de medição: ±4400 (N pico)
•Massa do martelo: 0.16 (kg)
Figura I.2: Martelo PCB 086C04.
I.3 Acelerômetro
Para medição da resposta ao impulso foi utilizado um acelerômetro da marca PCB, modelo352C68 “ceramic shear ICP Raccel. conn” (Figura I.3). Suas principais caracterísitcas são:
•Sensibilidade: (±10%) 10.2 (mV/(m/sš))
•Faixa de medição: ±491 (m/sš pico)
•Resolução de freqüência: (1 a 10000 Hz) 0.0015 (m/sš RMS)
•Faixa de freqüência: (±5%) 0.5 a 10000 (Hz)
•Massa: 2.0 (gramas)
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 141/147
ANEXO I -- Equipamentos de Medição 122
Figura I.3: Acelerômetro PCB 352C68.
I.4 Sistema de Aquisição de SinalO sistema de aquisição é baseado em “hardware” e “software” comercializado pela empresa
“National Instruments” (http://www.ni.com). O Hardware é composto por chassis (“frame”)
SCXI 1000 (Figura I.4), módulo de entrada para acelerômetros SCXI1531, módulo de cabea-
mento SCXI 1180, e uma placa de aquisição de sinais DAQCard 6062E. O Software utilizado é
o LabView Rna versão 8.2.
Figura I.4: Acelerômetro PCB 352C68.
As principais características são:
•SCXI1531 (Figura I.5):
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 142/147
ANEXO I -- Equipamentos de Medição 123
–Oito canais.
–Ganho programado por canal.
–Fonte de corrente 4 (mA), 20 (V ).
–Filtro passa baixas.
Figura I.5: Placa de entrada SCXI 1531.
•DAQCard 6062E (Figura I.6):
–16 entradas analógicas.
∗Resolução 12bits.
∗Taxa de amostragem 500kS/s(2).
∗Faixa de entrada de tensão ±0.05 − ±10(V ).
–Duas saídas analógicas.
∗Taxa de amostragem 850kS/s.
∗Faixa de tensão ±10(V )
–8 linhas digitais (TTL/CMOS)
2500 mil amostragens por segundo.

8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 143/147
ANEXO I -- Equipamentos de Medição 124
Figura I.6: Placa de aquisição DAQCArd 6062E.
I.5 Proximitor
Transdutor de deslocamento (sensor de proximidade) (Figura I.7), tipo indutivo, marca Vi-
brocontrol, modelo PS 1002 e condicionador de sinal (Figura I.8), modelo GS 5001. Segundo
o fabricante, a sensibilidade para o material Aço SAE 8640 é de 8 (V /mm) e a faixa linear vai
de 0, 5 a2, 5(mm) à uma temperatura ambiente de 27 (C ).
Figura I.7: Sensor PS 1002.
Figura I.8: Condicionador GS 501.
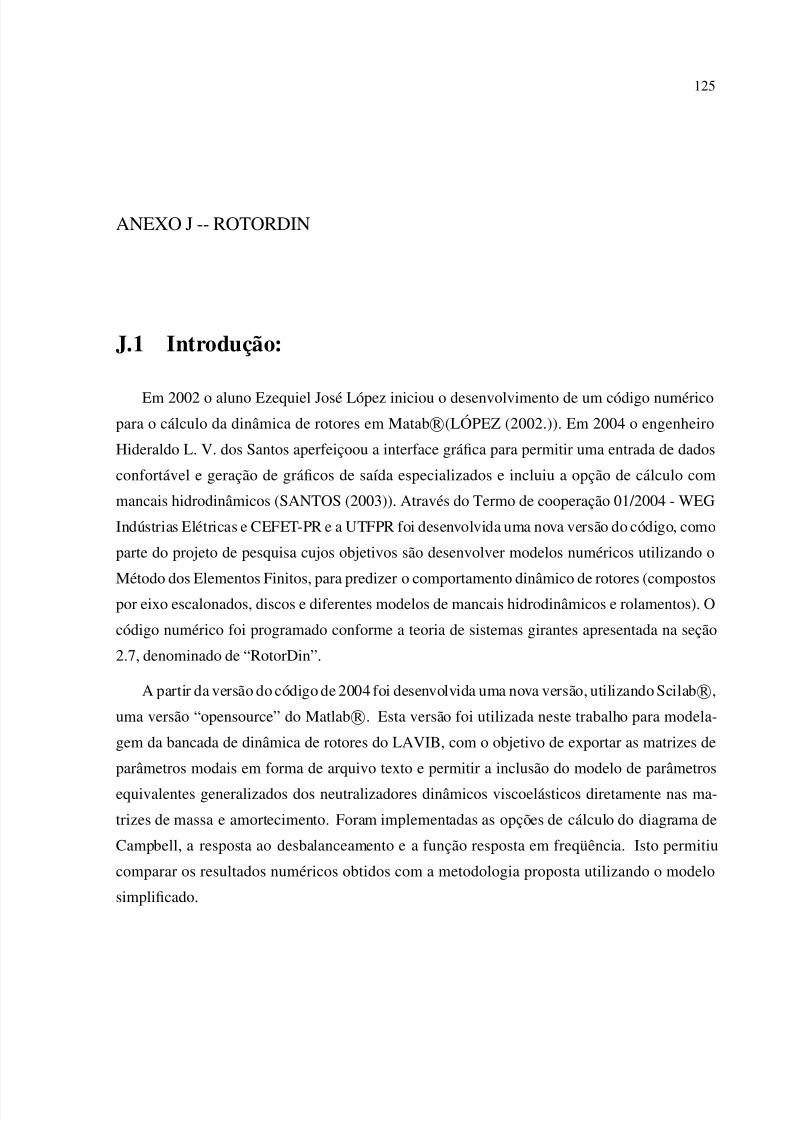
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 144/147
125
ANEXO J -- ROTORDIN
J.1 Introdução:
Em 2002 o aluno Ezequiel José López iniciou o desenvolvimento de um código numéricopara o cálculo da dinâmica de rotores em Matab R(LÓPEZ (2002.)). Em 2004 o engenheiro
Hideraldo L. V. dos Santos aperfeiçoou a interface gráfica para permitir uma entrada de dados
confortável e geração de gráficos de saída especializados e incluiu a opção de cálculo com
mancais hidrodinâmicos (SANTOS (2003)). Através do Termo de cooperação 01/2004 - WEG
Indústrias Elétricas e CEFET-PR e a UTFPR foi desenvolvida uma nova versão do código, como
parte do projeto de pesquisa cujos objetivos são desenvolver modelos numéricos utilizando o
Método dos Elementos Finitos, para predizer o comportamento dinâmico de rotores (compostos
por eixo escalonados, discos e diferentes modelos de mancais hidrodinâmicos e rolamentos). O
código numérico foi programado conforme a teoria de sistemas girantes apresentada na seção
2.7, denominado de “RotorDin”.
A partir da versão do código de 2004 foi desenvolvida uma nova versão, utilizando Scilab R,
uma versão “opensource” do Matlab R. Esta versão foi utilizada neste trabalho para modela-
gem da bancada de dinâmica de rotores do LAVIB, com o objetivo de exportar as matrizes de
parâmetros modais em forma de arquivo texto e permitir a inclusão do modelo de parâmetros
equivalentes generalizados dos neutralizadores dinâmicos viscoelásticos diretamente nas ma-
trizes de massa e amortecimento. Foram implementadas as opções de cálculo do diagrama de
Campbell, a resposta ao desbalanceamento e a função resposta em freqüência. Isto permitiu
comparar os resultados numéricos obtidos com a metodologia proposta utilizando o modelo
simplificado.
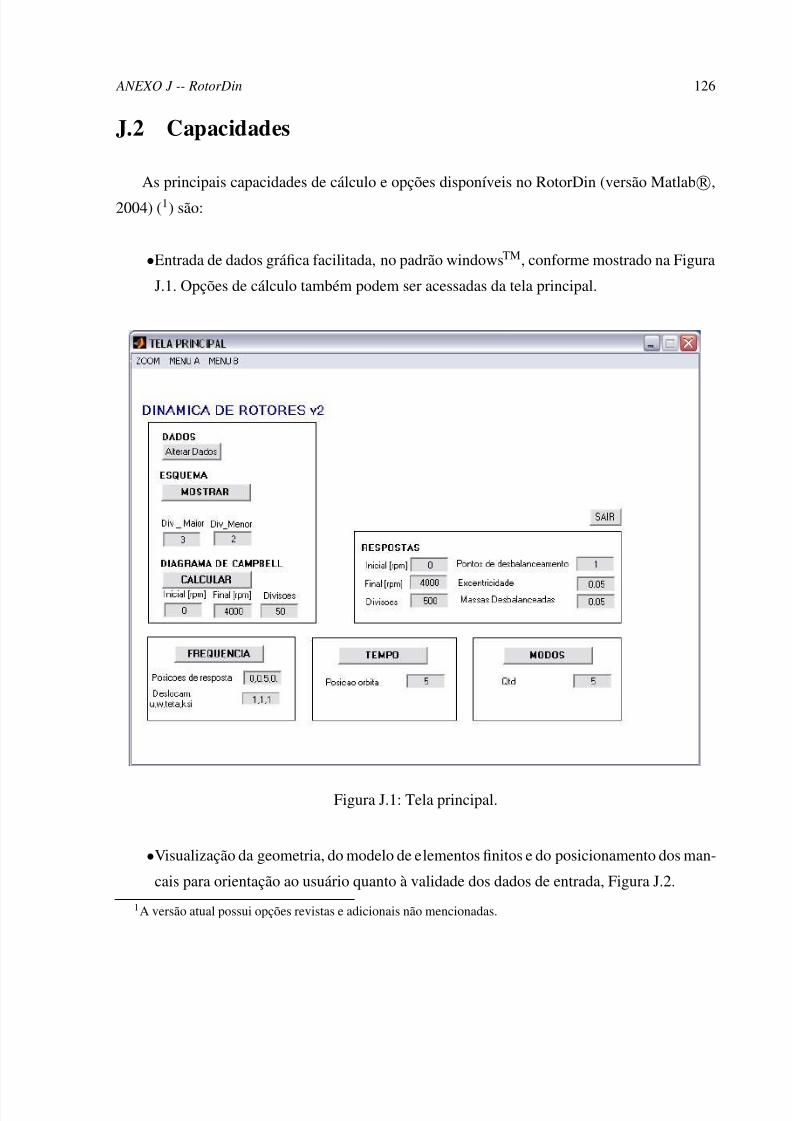
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 145/147
ANEXO J -- RotorDin 126
J.2 Capacidades
As principais capacidades de cálculo e opções disponíveis no RotorDin (versão Matlab R
,
2004) (1) são:
•Entrada de dados gráfica facilitada, no padrão windowsTM, conforme mostrado na Figura
J.1. Opções de cálculo também podem ser acessadas da tela principal.
Figura J.1: Tela principal.
•Visualização da geometria, do modelo de elementos finitos e do posicionamento dos man-
cais para orientação ao usuário quanto à validade dos dados de entrada, Figura J.2.
1A versão atual possui opções revistas e adicionais não mencionadas.
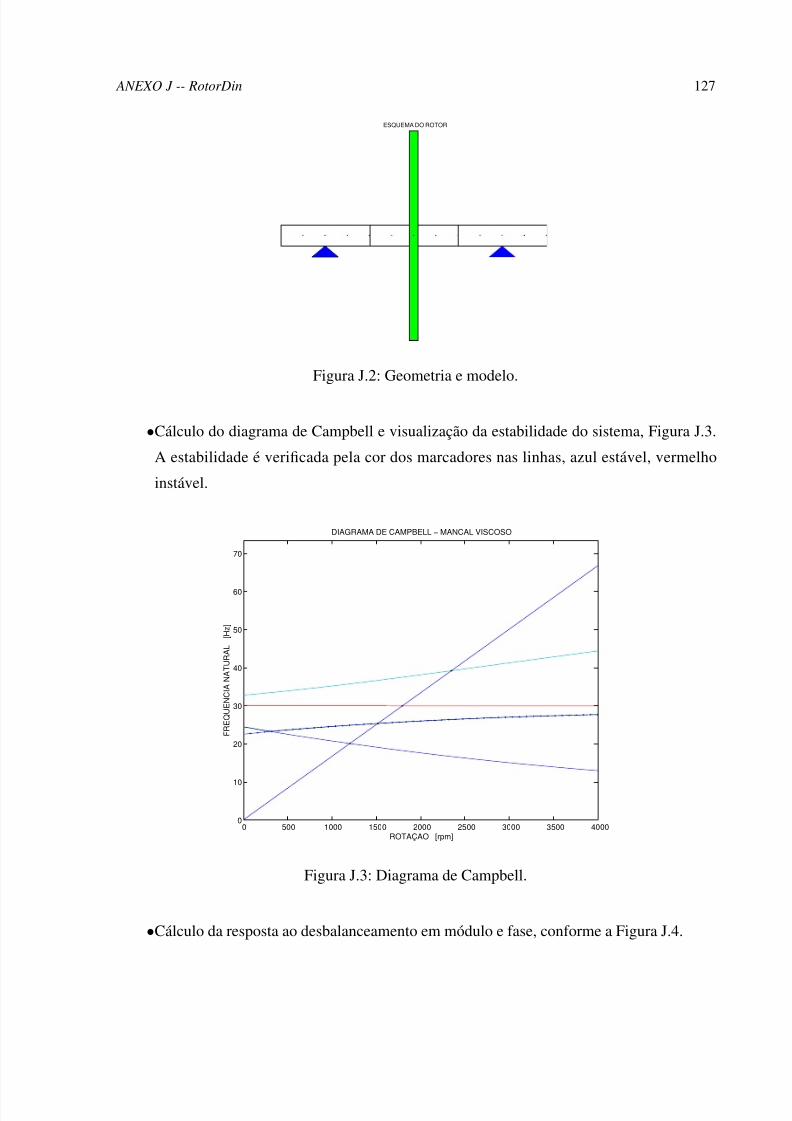
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 146/147
ANEXO J -- RotorDin 127
ESQUEMA DO ROTOR
Figura J.2: Geometria e modelo.
•Cálculo do diagrama de Campbell e visualização da estabilidade do sistema, Figura J.3.
A estabilidade é verificada pela cor dos marcadores nas linhas, azul estável, vermelho
instável.
0 500 1000 1500 2000 2500 3000 3500 40000
10
20
30
40
50
60
70
ROTAÇAO [rpm]
F R E Q U E N C I A
N A T U R A L
[ H z ]
DIAGRAMA DE CAMPBELL − MANCAL VISCOSO
Figura J.3: Diagrama de Campbell.
•Cálculo da resposta ao desbalanceamento em módulo e fase, conforme a Figura J.4.
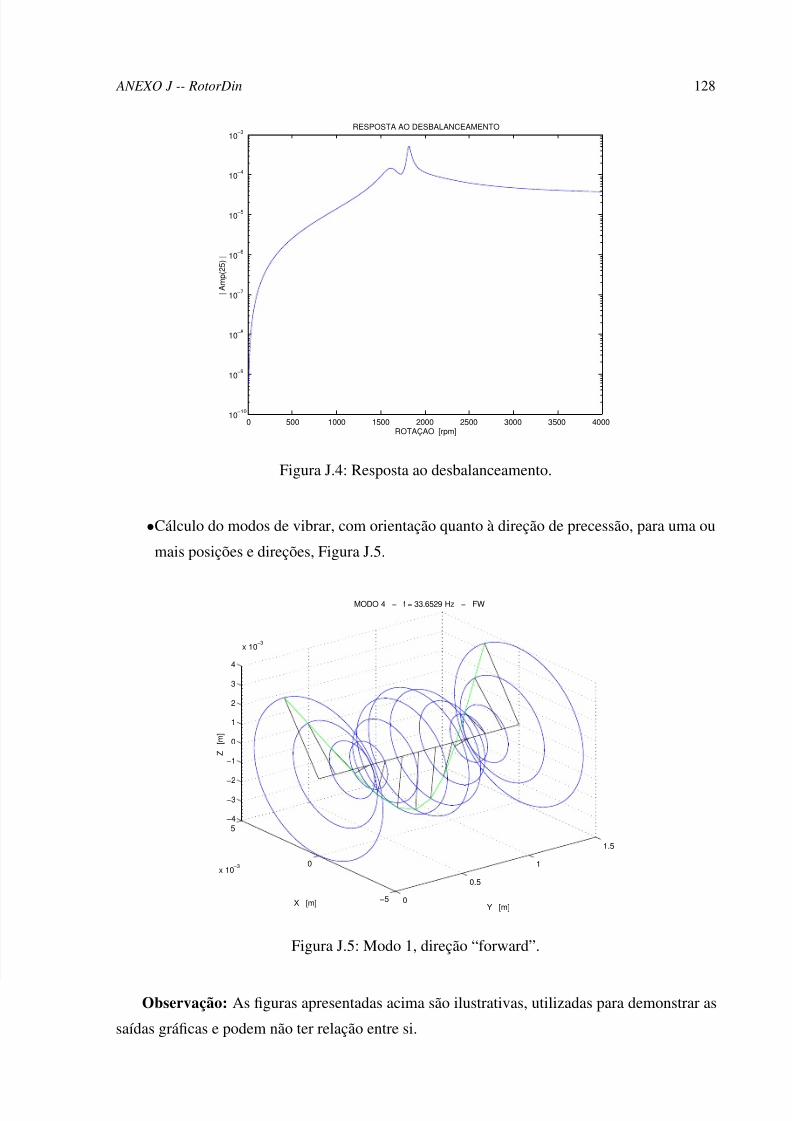
8/6/2019 Controle de Vibracao Flexional Em Sistemas Girantes Utilizando Neutralizadores Dinamicos Viscoelasticos
http://slidepdf.com/reader/full/controle-de-vibracao-flexional-em-sistemas-girantes-utilizando-neutralizadores 147/147
ANEXO J -- RotorDin 128
0 500 1000 1500 2000 2500 3000 3500 400010
−10
10−9
10−8
10−7
10−6
10−5
10−4
10−3
ROTAÇAO [rpm]
| A m p ( 2 5 ) |
RESPOSTA AO DESBALANCEAMENTO
Figura J.4: Resposta ao desbalanceamento.
•Cálculo do modos de vibrar, com orientação quanto à direção de precessão, para uma ou
mais posições e direções, Figura J.5.
MODO 4 − f = 33 6529 Hz − FW





























