Embed Size (px)
Citation preview

Finance Optimisation Decantation Transport Nsp
Contributions a la commande de systemesdynamiques, aspects numeriques et applications
J.-Ph. Chancelier
Cermics, Ecole des Ponts ParisTech.
9 Fevrier 2011
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
PrsentationFinance
OptimisationEnvironnement
TransportEnergie
Nsp/Scicoslab
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Problemes en finance
Un probleme de controle impulsionnel et continu
J.P. Chancelier, B. Øksendal, and A. Sulem. Combined stochastic control
and optimal stopping, and application to numerical approximation of
combined stochastic and impulse control. In Stochastic Financial
Mathematics. Proc. Steklov Math. Inst. (2002).
Un cas particulier de l’algorithme de Howard
J.P. Chancelier, M. Messaoud, and A. Sulem. A policy iteration algorithm
for fixed point problems with nonexpansive operators. Math. Meth. Oper.
Res., (2007).
Un probleme de controle impulsionnel de type risk-sensitive
Tomasz R. Bielecki, Jean-Philippe Chancelier, Stanley R. Pliska, and
Agnes Sulem. Risk sensitive portfolio optimization with transaction costs.
Journal of computational Finance, (2004).
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Problemes en finance
Un probleme de controle impulsionnel et continu
J.P. Chancelier, B. Øksendal, and A. Sulem. Combined stochastic control
and optimal stopping, and application to numerical approximation of
combined stochastic and impulse control. In Stochastic Financial
Mathematics. Proc. Steklov Math. Inst. (2002).
Un cas particulier de l’algorithme de Howard
J.P. Chancelier, M. Messaoud, and A. Sulem. A policy iteration algorithm
for fixed point problems with nonexpansive operators. Math. Meth. Oper.
Res., (2007).
Un probleme de controle impulsionnel de type risk-sensitive
Tomasz R. Bielecki, Jean-Philippe Chancelier, Stanley R. Pliska, and
Agnes Sulem. Risk sensitive portfolio optimization with transaction costs.
Journal of computational Finance, (2004).
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Problemes en finance
Un probleme de controle impulsionnel et continu
J.P. Chancelier, B. Øksendal, and A. Sulem. Combined stochastic control
and optimal stopping, and application to numerical approximation of
combined stochastic and impulse control. In Stochastic Financial
Mathematics. Proc. Steklov Math. Inst. (2002).
Un cas particulier de l’algorithme de Howard
J.P. Chancelier, M. Messaoud, and A. Sulem. A policy iteration algorithm
for fixed point problems with nonexpansive operators. Math. Meth. Oper.
Res., (2007).
Un probleme de controle impulsionnel de type risk-sensitive
Tomasz R. Bielecki, Jean-Philippe Chancelier, Stanley R. Pliska, and
Agnes Sulem. Risk sensitive portfolio optimization with transaction costs.
Journal of computational Finance, (2004).
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Problemes en finance
Un probleme de controle impulsionnel et continu
J.P. Chancelier, B. Øksendal, and A. Sulem. Combined stochastic control
and optimal stopping, and application to numerical approximation of
combined stochastic and impulse control. In Stochastic Financial
Mathematics. Proc. Steklov Math. Inst. (2002).
Un cas particulier de l’algorithme de Howard
J.P. Chancelier, M. Messaoud, and A. Sulem. A policy iteration algorithm
for fixed point problems with nonexpansive operators. Math. Meth. Oper.
Res., (2007).
Un probleme de controle impulsionnel de type risk-sensitive
Tomasz R. Bielecki, Jean-Philippe Chancelier, Stanley R. Pliska, and
Agnes Sulem. Risk sensitive portfolio optimization with transaction costs.
Journal of computational Finance, (2004).
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Problemes en finance
Un probleme de controle impulsionnel et continu
J.P. Chancelier, B. Øksendal, and A. Sulem. Combined stochastic control
and optimal stopping, and application to numerical approximation of
combined stochastic and impulse control. In Stochastic Financial
Mathematics. Proc. Steklov Math. Inst. (2002).
Un cas particulier de l’algorithme de Howard
J.P. Chancelier, M. Messaoud, and A. Sulem. A policy iteration algorithm
for fixed point problems with nonexpansive operators. Math. Meth. Oper.
Res., (2007).
Un probleme de controle impulsionnel de type risk-sensitive
Tomasz R. Bielecki, Jean-Philippe Chancelier, Stanley R. Pliska, and
Agnes Sulem. Risk sensitive portfolio optimization with transaction costs.
Journal of computational Finance, (2004).
J.-Ph. Chancelier Universite Paris-Est, Ecole des Ponts ParisTech
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Un probleme de controle impulsionnel et continu
Portefeuille : actif risque, Y ; actif sur, X .
Consommation c(t) prelevee sur l’actif sur.
Acheter ou vendre de l’actif risque : cout fixe k > 0 ; coutproportionnel λ|ξ| (λ ≥ 0).
Controle impulsionnel : t = (τ1, τ2, . . . ; ξ1, ξ2, . . .).
0 ≤ τ1 < τ2 < · · · dates de modification du portefeuille.(ξj)j∈N suite des quantites echangees.
On suppose limj→∞ τj = ∞ p.s. (on peut avoir τn = ∞ p.s.pour n <∞) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Dynamique du portefeuille sous la politique w = (c , t)
dXw (t) = (r Xw (t)− c(t))dt , pour τi ≤ t < τi+1 ,dY w (t) = αY w (t)dt + σY w (t)dW (t) , τi ≤ t < τi+1
c(t) est le processus de consommation de l’agent qui doit etreFt-adapte et positif.
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Dynamique du portefeuille sous la politique w = (c , t)
Aux instants de transition :
Xw (τi+1) = Xw (τ−i+1)− k − ξi+1 − λ|ξi+1| , ∀i ∈ N
Y w (τi+1) = Y w (τ−i+1) + ξi+1 , ∀i ∈ N.
ξi+1 > 0 : achat de l’actif risque (ξi+1 < 0 : vente).
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Dynamique du portefeuille sous la politique w = (c , t)
Aux instants de transition :
Xw (τi+1) = Xw (τ−i+1)− k − ξi+1 − λ|ξi+1| , ∀i ∈ N
Y w (τi+1) = Y w (τ−i+1) + ξi+1 , ∀i ∈ N.
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
La fonction cout a maximiser
L’investisseur cherche a maximiser l’esperance d’une utiliteactualisee sur un horizon infini :
Jw (x , y) = E x ,y[ ∫ ∞
0e−δt c
γ(t)
γdt]
(δ > 0 et γ ∈ (0, 1)).
On s’interesse au calcul du cout optimal v(x , y) et de la politiqueoptimale w∗ = (c∗, t∗) ∈ W associee verifiant :
v(x , y) = supw∈W
Jw (x , y) = Jw∗
(x , y) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Une suite de problemes
Wn l’ensemble des controle avec au plus n transactions :v = (τ1, τ2, . . . , τn, τn+1; ξ1, ξ2, . . . , ξn) avec τn+1 = ∞ p.s.La suite de fonction valeurs :
vn(x , y) = supw∈Wn
Jw (x , y) , n = 0, 1, 2, . . . (1)
est croissante, majoree par v(x , y) et converge vers v(x , y).
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Interpretation du probleme k
Calcul des (vn)n∈N :
v0(x , y) = supc≥0
E x ,y[ ∞∫
0
e−δt cγ(t)
γdt]
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Interpretation du probleme k
Calcul des (vn)n∈N :
v1(x , y) = supc,τ
E x ,y[ τ∫
0
e−δt cγ(t)
γdt + e−δτMv0(X (τ)−,Y (τ)−)
],
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Interpretation du probleme k
Calcul des (vn)n∈N :
vk(x , y) = supc,τ
E x ,y[ τ∫
0
e−δt cγ(t)
γdt + e−δτMvk−1(X (τ)−,Y (τ)−)
],
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Interpretation du probleme k
Calcul des (vn)n∈N :
vk(x , y) = supc,τ
E x ,y[ τ∫
0
e−δt cγ(t)
γdt + e−δτMvk−1(X (τ)−,Y (τ)−)
],
Mg(x , y) := supg(x ′, y ′); ξ ∈ R \ 0, (x ′, y ′) ∈ S+,
avec :
x ′ = x ′(ξ) = x − k − ξ − λ|ξ| et y ′ = y ′(ξ) = y + ξ
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Probleme intermediaire
Probleme de controle stochastique continu avec temps d’arret oul’on cherche a maximiser le cout :
Jc,τ (x , y) = E x ,y
[ τ∫
0
e−δt cγ(t)
γdt + e−δτh(X (τ),Y (τ))
]
a savoir calculervh(x , y) = sup
c,τJc,τ (x , y) .
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Solution du probleme intermediaire
vh : solution de viscosite du probleme suivant :
maxLv(ζ), h(ζ)− v(ζ) = 0
avec :
Lv(x , y) := supc≥0
−δv +Acv(x , y) +cγ
γ,
et
Acv(x , y) := (rx − c)∂v
∂x+ αy
∂v
∂y+ 1
2σ2y2
∂2v
∂y2,
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Le probleme global
Suite de problemes :
maxLvk ,Mvk−1 − vk = 0
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Le probleme global
max (Lv ,Mv − v) = 0
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
Le probleme global
max (Lv ,Mv − v) = 0
La discretisation de l’operateur M conduit a un operateur discretnon expansif.
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Combined stochastic control and optimal stopping,. . .
0 10 20 30 40 50 60 70 80 90 100
0
10
20
30
40
50
60
70
80
90
100
...............................................
....................................................
............................................................
................................
. .................................................
.....................................................
................................................................
...............
....................
....................................................
...........................................................
..........................................
........................
.....................................................
..............................................................
..........................
...........................
......................................................
...................................................................
........
.........................
.......................................................
.....................................................................
.....................
........................................................
...............................................................
.
.....................................................
...................................................................
...........
..
...................................................
.......................................................................
.
..
.........................................................
..........................................................
.
........................................................
...................................................
..
..............................................................
...................................
..
..............................................................
...........................
..
..............................................................
..................
..
......................................................................
..
............................................................
...
................................................
...
....................................
....
....................
...
...
....
.
....
.
....
.
....
.
....
.
.....
.
......
.
.....
.
......
.
......
.
.......
.
.......
.
.......
.
.......
.
.......
.
.......
.
........
.
.......
.
........
.
.......
.
........
.
.........
.
......
.
........
.
.........
.
.........
.
.........
.
.........
.
.........
.
.
..........
.
...........
.
.........
.
............
.
......... ..
.
.........
..
.
.........
...
.
..........
. .
.
..........
..
.
..........
...
.
..........
... .
...........
.........
........
............
........
........
............
..........
......
............
...
.............
...
............
....
.............
...
...........
....
............
....
.............
...
............
....
............
...
............
.....
............
.......
.............
....
..........
.......
..........
........
...........
......
..........
........
...........
......
...........
...... ..
............
.......
.............
... ...
............
.......
.............
......
............
........
...........
........ ..
.............
........
............
..........
............
...........
.............
..........
.............
.........
.............
.........
............
......... .
.
.............
...........
..............
...........
.............
..........
.
..........
............
..
..........
.............
.
...........
..............
.
..........
..............
...
...........
..............
.
..........
............
...
...........
........... .
...
.............
............
.
.............
............
.
..............
............
.
............
.............
...
.............
...........
..
............
.............
. ..
.............
............
.
.............
............ .
.
............
..............
..
.............
...........
....
..............
............
.
...........
............
.... .
............
............
..... .
..........
..............
.......
..............
...........
......
..........
...............
.......
...........
...............
......
..........
...............
........
...........
...............
........
...........
..............
........
...........
...............
........
..............
...............
......
...............
........... ...
.....
..............
..............
......
.............
............
... ...... .
..............
..............
. ......
...............
..............
......
..............
..............
... .....
.............
..............
...........
...........
............
...............
............
............
..............
.............
............
..........
..............
............
.... .....
...............
............
.........
..............
............
.............
...............
.............
.............
...........
................
.............
............
..............
........... ..
...........
..............
.............
.
............
................
....... .....
............
...............
..............
.............
...............
..............
..............
................
............
.............
...............
...............
..............
...............
.................
...............
..............
.............
. ..
................
................
.............
...............
...............
..............
.
...............
.................
.............
.
..............
.................
...............
..
...............
.................
.............
..
..............
..............
...................
..
...............
..............
...................
.
...............
.............
...................
...
................
..............
...................
..
............
...............
.................
......
.............
..................
.................
.
............
.................
...................
...
.............
..................
...................
..
..............
..................
...................
.
...............
...................
....................
.
.................
..................
..................
.
................
..................
....................
.
...............
...............
.................
........
..
................
..................
......................
....
.
...............
..................
..................
.....
...
....
..
.................
.................
....................
...
...
....
....
.................
...................
......................
...
....
....
....
................
...................
......................
..................
..................
...................
......................
...
....
...
........
................
................
...........................
...
....
....
...........
..................
................
..........................
...
....
...
...
..........
.................
................
...........................
...
...
....
....
..........
.............
................
..........................
...... ..........................
..............
....................
............................ ....
...
...
...
....
...........
.............
....................
.............................. ....
...
...
...
....
............
..............
.....................
............................ ....
...
...
....
....
............
................
.....................
........................... ....
...
....
....
....
...........
.................
.......................
..........................
...
.............................
.................
......................
..............................
...
................................
..................
........................
..............................
...................................
.................
......................
..................................
....
..................................
...................
.......................
.................................
....
...................................
..................
.......................
......................................
....
....................................
..................
...........................
.....................................
....
....................................
.................
...........................
....................................... . .
...
......................................
...................
.............................
................................. .. .....
...
........................................
..................
......................
........................................ ....... ...
...
...
.......................................
....................
........................
...................................... .... .... ....
....
...
......................................
...................
........................
.......................................... ...... .
...
....
........................................
..............
.............................
............................................ ... . .
....
...
..........................................
................
...............................
.................................. ..... ... . .. . . . . . .. . . . . . ......................................................................................
V=57.74
V=57.51
V=57.948
V=57.915
S
B
Sell
Buy
NT
∆2
δ2
δ1
∆1
Figure: Politique optimale : transactions sur les frontieres des zones S(δ1) et B (δ2) avec un saut vers les courbes ∆1 et ∆2. S zone de ventede l’actif risque. B zone d’achat de l’actif risque. NT zone de nontransaction.
J.P. Chancelier, B. Øksendal, and A. Sulem.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Algorithme d’Howard : Iteration sur les politiques
Le probleme precedent apres discretisation :
v = max
(1
1 + δ∆max
0≤c≤cmax
Phc v +∆cγ/γ
,Mhv
).
Mhv : approximation discrete de M est non expansif((Mhv)(x) = v(x ′)).
Phc : matrice stochastique.
Propriete : Appliquer Mh un nombre fini de fois conduit dansune zone ou les transactions deviennent interdites.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Algorithme d’Howard : Iteration sur les politiques
Le probleme precedent apres discretisation :
v = max
(1
1 + δ∆max
0≤c≤cmax
Phc v +∆cγ/γ
,Mhv
).
Mhv : approximation discrete de M est non expansif((Mhv)(x) = v(x ′)).
Phc : matrice stochastique.
Propriete : Appliquer Mh un nombre fini de fois conduit dansune zone ou les transactions deviennent interdites.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Algorithme d’Howard : Iteration sur les politiques
Le probleme precedent apres discretisation :
v = max
(1
1 + δ∆max
0≤c≤cmax
Phc v +∆cγ/γ
,Mhv
).
Mhv : approximation discrete de M est non expansif((Mhv)(x) = v(x ′)).
Phc : matrice stochastique.
Propriete : Appliquer Mh un nombre fini de fois conduit dansune zone ou les transactions deviennent interdites.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Algorithme d’Howard : Iteration sur les politiques
Le probleme precedent apres discretisation :
v = max
(1
1 + δ∆max
0≤c≤cmax
Phc v +∆cγ/γ
,Mhv
).
Mhv : approximation discrete de M est non expansif((Mhv)(x) = v(x ′)).
Phc : matrice stochastique.
Propriete : Appliquer Mh un nombre fini de fois conduit dansune zone ou les transactions deviennent interdites.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Cadre general
Calcul d’un point fixe v de l’equation :
v(x) = max(Lv(x),Bv(x)), x ∈ E (2)
ou E est un ensemble fini, l’operateur L est contractant etl’operateur B est non-expansif.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Cadre general
Calcul d’un point fixe v de l’equation :
v(x) = max(Lv(x),Bv(x)), x ∈ E (2)
ou E est un ensemble fini, l’operateur L est contractant etl’operateur B est non-expansif.Plus generalement :
v(x) = max( supw∈W
Lwv(x), supz∈Z
Bzv(x)), x ∈ E , (3)
ou W et Z sont deux espace de controle et les operateurs Lw sontcontractants et les operateurs Bz sont non expansifs
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Reformulation
Pour T ∈ P(E), vT est la restriction de v a T .
OT v(x)def=
Lv(x) si x ∈ C ou C
def= E\T ,
Bv(x) if x ∈ T .(4)
On cherche une solution (v⋆,T ⋆) ∈ V × Tad du probleme :
v⋆ = maxT∈Tad
OT v⋆ = OT⋆v⋆ avec Tad
def= P(E)\E . (5)
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Hypotheses
H1 : Pour tout T ∈ Tad, il existe L, B et k tels que :
OT v = v ⇔ LvC = vC et vT = BvC + k ,
H2 : L est contractant et verifie un principe du maximumdiscret.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Hypotheses
H1 : Pour tout T ∈ Tad, il existe L, B et k tels que :
OT v = v ⇔ LvC = vC et vT = BvC + k ,
OT v1 −OT v
2 ≤ v1 − v2 ⇒ Lv1C − Lv2C ≤ v1C − v2C ,
H2 : L est contractant et verifie un principe du maximumdiscret.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Hypotheses
H1 : Pour tout T ∈ Tad, il existe L, B et k tels que :
OT v = v ⇔ LvC = vC et vT = BvC + k ,
OT v1 −OT v
2 ≤ v1 − v2 ⇒ Lv1C − Lv2C ≤ v1C − v2C ,
et B(v1C − v2C ) ≤ v1T − v2T ,
H2 : L est contractant et verifie un principe du maximumdiscret.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Hypotheses
H1 : Pour tout T ∈ Tad, il existe L, B et k tels que :
OT v = v ⇔ LvC = vC et vT = BvC + k ,
OT v1 −OT v
2 ≤ v1 − v2 ⇒ Lv1C − Lv2C ≤ v1C − v2C ,
et B(v1C − v2C ) ≤ v1T − v2T ,
vC ≥ 0 ⇒ BvC ≥ 0.
H2 : L est contractant et verifie un principe du maximumdiscret.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Hypotheses
H1 : Pour tout T ∈ Tad, il existe L, B et k tels que :
OT v = v ⇔ LvC = vC et vT = BvC + k ,
OT v1 −OT v
2 ≤ v1 − v2 ⇒ Lv1C − Lv2C ≤ v1C − v2C ,
et B(v1C − v2C ) ≤ v1T − v2T ,
vC ≥ 0 ⇒ BvC ≥ 0.
H2 : L est contractant et verifie un principe du maximumdiscret.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Resultats
Sous ces hypotheses l’algorithme d’iteration sur les politiquesconverge vers l’unique point fixe du probleme :v = maxT∈Tad OT v
Le probleme de point fixe precedent : lien avec probleme duplus court chemin stochastique.
Il est possible de construire des exemples ou les hypothesesH1 et H2 sont verifiees et qui sortent du cadre du problemede plus court chemin stochastique.
Le probleme de finance discret verifie H1 et H2.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Resultats
Sous ces hypotheses l’algorithme d’iteration sur les politiquesconverge vers l’unique point fixe du probleme :v = maxT∈Tad OT v
Le probleme de point fixe precedent : lien avec probleme duplus court chemin stochastique.
Il est possible de construire des exemples ou les hypothesesH1 et H2 sont verifiees et qui sortent du cadre du problemede plus court chemin stochastique.
Le probleme de finance discret verifie H1 et H2.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Resultats
Sous ces hypotheses l’algorithme d’iteration sur les politiquesconverge vers l’unique point fixe du probleme :v = maxT∈Tad OT v
Le probleme de point fixe precedent : lien avec probleme duplus court chemin stochastique.
Il est possible de construire des exemples ou les hypothesesH1 et H2 sont verifiees et qui sortent du cadre du problemede plus court chemin stochastique.
Le probleme de finance discret verifie H1 et H2.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
A policy iteration algorithm for fixed point problems with nonexpansive operators
Resultats
Sous ces hypotheses l’algorithme d’iteration sur les politiquesconverge vers l’unique point fixe du probleme :v = maxT∈Tad OT v
Le probleme de point fixe precedent : lien avec probleme duplus court chemin stochastique.
Il est possible de construire des exemples ou les hypothesesH1 et H2 sont verifiees et qui sortent du cadre du problemede plus court chemin stochastique.
Le probleme de finance discret verifie H1 et H2.
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
PrsentationFinance
OptimisationEnvironnement
TransportEnergie
Nsp/Scicoslab
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Optimisation et Controle
Effet ou non effet dualK. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. Cohen De Lara,
and T. Guilbaud. Dual effect free stochastic controls. Annals of Operation
Research, (2006).
Discretisation d’un probleme avec contraintes de mesurabiliteP. Carpentier, J.-Ph Chancelier, M. De Lara, and SOWG. Approximations
of stochastic optimization problems subject to measurability constraints.
SIAM J. Optim., (2009).
Points fixes d’operateurs non expansifsJ.-Ph. Chancelier. Iterative schemes for computing fixed points of
nonexpansive mappings in banach spaces. Journal of Mathematical
Analysis and Applications (2009).
J.-Ph. Chancelier. T-class algorithms for pseudocontractions and k-strict
pseudocontractions in hilbert spaces. Nonlinear Analysis : Theory,
Methods & Applications (2009) .
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Optimisation et Controle
Effet ou non effet dualK. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. Cohen De Lara,
and T. Guilbaud. Dual effect free stochastic controls. Annals of Operation
Research, (2006).
Discretisation d’un probleme avec contraintes de mesurabiliteP. Carpentier, J.-Ph Chancelier, M. De Lara, and SOWG. Approximations
of stochastic optimization problems subject to measurability constraints.
SIAM J. Optim., (2009).
Points fixes d’operateurs non expansifsJ.-Ph. Chancelier. Iterative schemes for computing fixed points of
nonexpansive mappings in banach spaces. Journal of Mathematical
Analysis and Applications (2009).
J.-Ph. Chancelier. T-class algorithms for pseudocontractions and k-strict
pseudocontractions in hilbert spaces. Nonlinear Analysis : Theory,
Methods & Applications (2009) .
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Optimisation et Controle
Effet ou non effet dualK. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. Cohen De Lara,
and T. Guilbaud. Dual effect free stochastic controls. Annals of Operation
Research, (2006).
Discretisation d’un probleme avec contraintes de mesurabiliteP. Carpentier, J.-Ph Chancelier, M. De Lara, and SOWG. Approximations
of stochastic optimization problems subject to measurability constraints.
SIAM J. Optim., (2009).
Points fixes d’operateurs non expansifsJ.-Ph. Chancelier. Iterative schemes for computing fixed points of
nonexpansive mappings in banach spaces. Journal of Mathematical
Analysis and Applications (2009).
J.-Ph. Chancelier. T-class algorithms for pseudocontractions and k-strict
pseudocontractions in hilbert spaces. Nonlinear Analysis : Theory,
Methods & Applications (2009) .
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Optimisation et Controle
Effet ou non effet dualK. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. Cohen De Lara,
and T. Guilbaud. Dual effect free stochastic controls. Annals of Operation
Research, (2006).
Discretisation d’un probleme avec contraintes de mesurabiliteP. Carpentier, J.-Ph Chancelier, M. De Lara, and SOWG. Approximations
of stochastic optimization problems subject to measurability constraints.
SIAM J. Optim., (2009).
Points fixes d’operateurs non expansifsJ.-Ph. Chancelier. Iterative schemes for computing fixed points of
nonexpansive mappings in banach spaces. Journal of Mathematical
Analysis and Applications (2009).
J.-Ph. Chancelier. T-class algorithms for pseudocontractions and k-strict
pseudocontractions in hilbert spaces. Nonlinear Analysis : Theory,
Methods & Applications (2009) .
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Optimisation et Controle
Effet ou non effet dualK. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. Cohen De Lara,
and T. Guilbaud. Dual effect free stochastic controls. Annals of Operation
Research, (2006).
Discretisation d’un probleme avec contraintes de mesurabiliteP. Carpentier, J.-Ph Chancelier, M. De Lara, and SOWG. Approximations
of stochastic optimization problems subject to measurability constraints.
SIAM J. Optim., (2009).
Points fixes d’operateurs non expansifsJ.-Ph. Chancelier. Iterative schemes for computing fixed points of
nonexpansive mappings in banach spaces. Journal of Mathematical
Analysis and Applications (2009).
J.-Ph. Chancelier. T-class algorithms for pseudocontractions and k-strict
pseudocontractions in hilbert spaces. Nonlinear Analysis : Theory,
Methods & Applications (2009) .
J.P. Chancelier, M. Messaoud, and A. Sulem
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Effet Dual
Commandes en boucle fermee sur les informations disponibles.
Observations revelees de facon causale au cours du temps.
Structure d’information non classique : possibilite de perte dememoire sur les observations passees.
Une commande a l’instant present agit sur l’information quisera utilisee par les commandes futures.
Une commande est cherchee de facon a minimiser un coutmais elle peut aussi etre cherchee de facon a ameliorer desdecisions futures en ameliorant l’information disponible pources decisions futures.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Effet Dual
Commandes en boucle fermee sur les informations disponibles.
Observations revelees de facon causale au cours du temps.
Structure d’information non classique : possibilite de perte dememoire sur les observations passees.
Une commande a l’instant present agit sur l’information quisera utilisee par les commandes futures.
Une commande est cherchee de facon a minimiser un coutmais elle peut aussi etre cherchee de facon a ameliorer desdecisions futures en ameliorant l’information disponible pources decisions futures.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Effet Dual
Commandes en boucle fermee sur les informations disponibles.
Observations revelees de facon causale au cours du temps.
Structure d’information non classique : possibilite de perte dememoire sur les observations passees.
Une commande a l’instant present agit sur l’information quisera utilisee par les commandes futures.
Une commande est cherchee de facon a minimiser un coutmais elle peut aussi etre cherchee de facon a ameliorer desdecisions futures en ameliorant l’information disponible pources decisions futures.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Effet Dual
Commandes en boucle fermee sur les informations disponibles.
Observations revelees de facon causale au cours du temps.
Structure d’information non classique : possibilite de perte dememoire sur les observations passees.
Une commande a l’instant present agit sur l’information quisera utilisee par les commandes futures.
Une commande est cherchee de facon a minimiser un coutmais elle peut aussi etre cherchee de facon a ameliorer desdecisions futures en ameliorant l’information disponible pources decisions futures.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Effet Dual
Commandes en boucle fermee sur les informations disponibles.
Observations revelees de facon causale au cours du temps.
Structure d’information non classique : possibilite de perte dememoire sur les observations passees.
Une commande a l’instant present agit sur l’information quisera utilisee par les commandes futures.
Une commande est cherchee de facon a minimiser un coutmais elle peut aussi etre cherchee de facon a ameliorer desdecisions futures en ameliorant l’information disponible pources decisions futures.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Non effet dual
Quand l’information future n’est-elle pas affectee par lescommandes passees ?
U = E
[U|FU
]
Pouvoir traiter des problemes par des methodesvariationnelles.
Pouvoir discretiser a l’avance la tribu des observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Non effet dual
Quand l’information future n’est-elle pas affectee par lescommandes passees ?
U = E
[U|FU
]= E [U|F ]
Pouvoir traiter des problemes par des methodesvariationnelles.
Pouvoir discretiser a l’avance la tribu des observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Absence d’effet dual : Le cadre minimal utilise
Etude des effets des commandes en boucle ouverte et obtenirdes conclusions sur l’effet des commandes en boucle fermee.
On se donne :
une fonction d’observation h : U × Ω → Ydes espaces :
U, pour les controles,
Ω, pour les aleas
Y , pour les observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Les controles
L’ensemble des feebacks est defini par
Γ := γ : Ω → U ,
l’ensemble des feedbacks en boucle ouverte ⊥U est defini par
⊥U := γ ∈ Γ | ∀(ω, ω′) ∈ Ω2 , γ(ω) = γ(ω′) .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
Pour g : Ω → Y , part(g) est la partition generee par g :
part(g) := g−1(y), y ∈ g(Ω) . (6)
Pour deux fonctions gi : Ω → Yi , i = 1, 2, g1 estmesurable
par rapport a g2 si
part(g1) ⊃ part(g2)
.
Les feedbacks admissibles Fad ⊂ Γ : les feedbacks mesurables
par rapport aux observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
Pour g : Ω → Y , part(g) est la partition generee par g :
part(g) := g−1(y), y ∈ g(Ω) . (6)
Pour deux fonctions gi : Ω → Yi , i = 1, 2, g1 estmesurable
par rapport a g2 si
part(g1) ⊃ part(g2)
.
Les feedbacks admissibles Fad ⊂ Γ : les feedbacks mesurables
par rapport aux observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
Pour g : Ω → Y , part(g) est la partition generee par g :
part(g) := g−1(y), y ∈ g(Ω) . (6)
Pour deux fonctions gi : Ω → Yi , i = 1, 2, g1 estmesurable
par rapport a g2 si
part(g1) ⊃ part(g2)
.
Les feedbacks admissibles Fad ⊂ Γ : les feedbacks mesurables
par rapport aux observations.
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
g2 XΩ :
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
g1 Y
Ω :
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Mesurabilite (g1 g2)
g2 h
g1 Y
Ω :X
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications
Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Observation apres feedback
Les commandes influent sur l’information disponible :
Pour tout feedback γ ∈ Γ, l’observation apres feedback
ηγ : Ω → Y est definie par
∀ω ∈ Ω , ηγ(ω) := h(γ(ω), ω
).
L’ensemble des feedbacks admissibles Fad est defini par
Fad := γ ∈ Γ | γ ηγ . (7)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Observation apres feedback
Les commandes influent sur l’information disponible :
Pour tout feedback γ ∈ Γ, l’observation apres feedback
ηγ : Ω → Y est definie par
∀ω ∈ Ω , ηγ(ω) := h(γ(ω), ω
).
L’ensemble des feedbacks admissibles Fad est defini par
Fad := γ ∈ Γ | γ ηγ . (7)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Non effet dual en boucle ouverte
Definition : Il n’y a pas d’effet dual en boucle ouverte si :
∀(γ, γ′) ∈ ⊥U ×⊥U , ηγ ≡ ηγ′
.
Proposition : Il n’y a pas d’effet dual en boucle ouverte si etseulement si
∃ζ : Ω → Z , ∃p : U ×Z → Y
telles que h(u, ω) = p(u, ζ(ω)) et p(u, · ) est injective .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Non effet dual en boucle ouverte
Definition : Il n’y a pas d’effet dual en boucle ouverte si :
∀(γ, γ′) ∈ ⊥U ×⊥U , ηγ ≡ ηγ′
.
Proposition : Il n’y a pas d’effet dual en boucle ouverte si etseulement si
∃ζ : Ω → Z , ∃p : U ×Z → Y
telles que h(u, ω) = p(u, ζ(ω)) et p(u, · ) est injective .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Si pas d’effet dual en boucle ouverte
Soit ζ toute application de domaine Ω telle que :
∀γ ∈ ⊥U , ηγ ≡ ζ .
On introduit l’ensemble des feebacks sans effet dual :
Fnde := γ ∈ F
ad | ηγ ≡ ζ . (8)
TheoremeSous l’hypothese de non effet dual en boucle ouverte, nous avons :
Fnde = F
ad ∩ Fζ avec F
ζ := γ ∈ Γ | γ ζ .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω)
Memoire
P ⊂ M
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω)
Memoire
P ⊂ M
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω) = φ(ub, uc , ω)
[a] = b, c
Memoire
P ⊂ M
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω) = φ(ub, uc , ω)
[a] = b, c
bP a ⇐⇒ b ∈ [a]
Memoire
P ⊂ M
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω) = φ(ub, uc , ω)
[a] = b, c
bP a ⇐⇒ b ∈ [a]
MemoirebM a ⇐⇒ hb( · , · ) ha( · , · )
P ⊂ M
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Le cas multi agents
Chaque agent a ∈ A prend une unique decision ua ∈ Ua et il luicorrespond une fonction d’observation hα : UA × Ω → Yα
Precedence
ha((ua, ub, uc , ud ), ω) = φ(ub, uc , ω)
[a] = b, c
bP a ⇐⇒ b ∈ [a]
MemoirebM a ⇐⇒ hb( · , · ) ha( · , · )
P ⊂ MbP a ⇒ bM a .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Dual effect free stochastic controls
Resultats
Proposition : si P ⊂ M alors la relation P est transitive.Proposition : Si il n’y a pas d’effet dual en boucle ouverte et siP ⊂ M alors :
FndeA = F
adA ∩ F
ζA .
Si de plus le graphe associe a la relation P est acyclique on a :
FndeA = γ ∈ ΓA | ∀α ∈ A , γα ζα . (9)
Feedback admissibles :
FadA := γ = (γα)α∈A ∈ ΓA | ∀α ∈ A , γα ηγα .
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
PrsentationFinance
OptimisationEnvironnement
TransportEnergie
Nsp/Scicoslab
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (1/2)
Decanteur secondaire de station d’epurationJ. Ph. Chancelier, M. Cohen De Lara and F. Pacard. Analysis of a
conservation pde with discontinuous flux : a model of settler. SIAM J. of
Applied Math. (1994).
J. Ph. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- I. flux theory and
steady states analysis. Water Research, (1997)
J.P. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- II. dynamical
analysis. Water Research, (1997).
Modele avec dependance en l’age des bouesJ. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. Existence of a
solution in an age-dependent transport-diffusion pde : a model of settler.
Mathematical Models and Methods in Applied Sciences, (1995)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (1/2)
Decanteur secondaire de station d’epurationJ. Ph. Chancelier, M. Cohen De Lara and F. Pacard. Analysis of a
conservation pde with discontinuous flux : a model of settler. SIAM J. of
Applied Math. (1994).
J. Ph. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- I. flux theory and
steady states analysis. Water Research, (1997)
J.P. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- II. dynamical
analysis. Water Research, (1997).
Modele avec dependance en l’age des bouesJ. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. Existence of a
solution in an age-dependent transport-diffusion pde : a model of settler.
Mathematical Models and Methods in Applied Sciences, (1995)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (1/2)
Decanteur secondaire de station d’epurationJ. Ph. Chancelier, M. Cohen De Lara and F. Pacard. Analysis of a
conservation pde with discontinuous flux : a model of settler. SIAM J. of
Applied Math. (1994).
J. Ph. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- I. flux theory and
steady states analysis. Water Research, (1997)
J.P. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- II. dynamical
analysis. Water Research, (1997).
Modele avec dependance en l’age des bouesJ. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. Existence of a
solution in an age-dependent transport-diffusion pde : a model of settler.
Mathematical Models and Methods in Applied Sciences, (1995)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (1/2)
Decanteur secondaire de station d’epurationJ. Ph. Chancelier, M. Cohen De Lara and F. Pacard. Analysis of a
conservation pde with discontinuous flux : a model of settler. SIAM J. of
Applied Math. (1994).
J. Ph. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- I. flux theory and
steady states analysis. Water Research, (1997)
J.P. Chancelier, M. Cohen De Lara, C.Joannis and F. Pacard. New
insights in dynamical modeling of a secondary settler- II. dynamical
analysis. Water Research, (1997).
Modele avec dependance en l’age des bouesJ. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. Existence of a
solution in an age-dependent transport-diffusion pde : a model of settler.
Mathematical Models and Methods in Applied Sciences, (1995)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (2/2)
Decanteur des eaux pluviales urbaines
J.P. Chancelier, M. Cohen De Lara, and F. Pacard. Equation de
Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert
regulier. C. R. Acad. Sci. Paris, Serie I Math., (1995)
J. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. A stochastic
approach to model bottom boundary conditions in a settling tank.
Stochastic Hydrology and Hydraulics, (1997).
Appareil pour l’estimation de vitesse de chute
J.P. Chancelier, G. Chebbo, and E. Lucas-Aiguier. Estimation of settling
velocities. Water Research, (1998)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (2/2)
Decanteur des eaux pluviales urbaines
J.P. Chancelier, M. Cohen De Lara, and F. Pacard. Equation de
Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert
regulier. C. R. Acad. Sci. Paris, Serie I Math., (1995)
J. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. A stochastic
approach to model bottom boundary conditions in a settling tank.
Stochastic Hydrology and Hydraulics, (1997).
Appareil pour l’estimation de vitesse de chute
J.P. Chancelier, G. Chebbo, and E. Lucas-Aiguier. Estimation of settling
velocities. Water Research, (1998)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (2/2)
Decanteur des eaux pluviales urbaines
J.P. Chancelier, M. Cohen De Lara, and F. Pacard. Equation de
Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert
regulier. C. R. Acad. Sci. Paris, Serie I Math., (1995)
J. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. A stochastic
approach to model bottom boundary conditions in a settling tank.
Stochastic Hydrology and Hydraulics, (1997).
Appareil pour l’estimation de vitesse de chute
J.P. Chancelier, G. Chebbo, and E. Lucas-Aiguier. Estimation of settling
velocities. Water Research, (1998)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application en environnement (2/2)
Decanteur des eaux pluviales urbaines
J.P. Chancelier, M. Cohen De Lara, and F. Pacard. Equation de
Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert
regulier. C. R. Acad. Sci. Paris, Serie I Math., (1995)
J. Ph. Chancelier, M. Cohen De Lara, and F. Pacard. A stochastic
approach to model bottom boundary conditions in a settling tank.
Stochastic Hydrology and Hydraulics, (1997).
Appareil pour l’estimation de vitesse de chute
J.P. Chancelier, G. Chebbo, and E. Lucas-Aiguier. Estimation of settling
velocities. Water Research, (1998)
K. Barty, P. Carpentier, J-P. Chancelier, G. Cohen, M. De Lara, and T. Guilbaud
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Decanteur secondaire de station d’epuration
Qe
A(x)
x
0
Qo
xb
Qf
xf
x
concentrationcf
input flow at the feeding point
Figure: Schema d’un decanteur
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Decanteur secondaire de station d’epuration
Existence d’un voile de boue
Qe
0
Qo
xb
xf
x
Eau propre
Boues
Figure: Voile de boues
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Decanteur secondaire de station d’epuration
Controle du voile de boue
1 21 41 61 81 100 120 140 160 180 200
0
42
83
125
167
208
250
292
334
375
417
Experimental data
1 21 41 61 81 100 120 140 160 180 200
0
42
83
125
167
208
250
292
334
375
417
0.50 0.50
Rising of the sludge blanket (PDE model)
time (mn)
Height (cm)
Figure: Montee du voile de boueJ. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Equation de conservation
Equation de conservation pour la concentration en boues c(t, x) :
A(x)∂c
∂t+
∂
∂x(A(x)cV (t, x , c)) = s(t, x),
Terme source s(t, x) = Qf (t)cf (t)δ(x − xf ).
V est discontinue aux sommet du decanteur, au pointd’alimentation et au bas du decanteur.
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Modele regularise
Avec Hǫ(x) : regularisee de la fonction de Heaviside, V estremplacee par :
Vǫ(t, x , c) = Hǫ1(x − xf )Qo(t)c − Hǫ1(xf − x)Qe(t)c
+ Hǫ2(x)Hǫ2(xb − x)A(x)cv(c) ,
ou ǫ = (ǫ1, ǫ2). Regularisation du terme source s(t, x) en sǫ(t, x) :
sǫ(t, x) = Qf (t)cf (t)δǫ(x − xf ) = Qf (t)cf (t)∂Hǫ1
∂x(x − xf ) .
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Probleme regularise
Equation de conservation :
A(x)∂c
∂t+
∂
∂xψǫ(x , c) = 0 , ∀ x ∈ R , (10)
Fonction de flux ψǫ donnee par :
ψǫ(x , c)def= (Hǫ1(x − xf )Qo − Hǫ1(xf − x)Qe)c (11)
+ Hǫ2(x)Hǫ2(xb − x)A(x)cv(c)− Hǫ1(x − xf )cfQf .
Solution de l’equation : limite si elle existe de la solution del’equation quand les parametres de lissage tendent vers zero.
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Caracterisation des solutions stationnaires
Mise en evidence de Φl (generalise le flux limitant)Pour cf et Qo fixes :
Φldef= inf
c>cfΦ(c)
def= (A(xf )cv(c) + Qoc) .
Φl : flux limitant.
Si Qo > 0, ce minimum est atteint pour c∗ ∈ [cf ,+∞).
Existence d’un voile de boue pour Φl ≥ Qf cf .
S’il y a egalite le voile de boue se trouve dans la zone (0, xf ),s’il y a inegalite stricte le voile de boue se trouve en xf .
Pas de voile de boue si Φl < Qf cf , le flux rejete a l’exterieurest −ψ0 = Qf cf − Φl > 0.
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Autres points etudies
Un modele a deux classes de particules. Dans les zones a forteconcentration en boue, des particules plus grosses peuvent seformer par coagulation et avoir ensuite des vitesses dedecantation plus fortes.
Un modele global en rajoutant le bassin d’aeration.
0 = A(x)∂c
∂t+
∂
∂xψǫ(x , c) ,
Qo = Qr +Qw ,Ωcf = mi + c(t, xb)Qr − Qf cf ,Qf = Qi +Qr ,Qf = Qe + Qo .
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Analysis of a conservation pde with discontinuous flux : a model of settler
Controle de la dynamique du voile de boue
Nous avons montre que cette dynamique pouvait etre decrite parune equation differentielle ordinaire.
c(t, x) = H(x − p(t))cS(x) ,
ou p(t) la position du voile de boue satisfait l’equation :
p = −ψ0
A(p)cS(p)= −
Qe
A(p)+ v(cS(p)) ,
Si maintenant on suppose qu’en plus Φl < Qf cf , alors on sait quecS(x) est unique. On obtient donc, pour un voile de boueascendant une equation algebro-differentielle.
p = −Qe
A(p)+ v(cS(p)) ,
−QecS(p) + A(p)cS(p)v(cS(p)) = −Qecf + A(xf )cf v(cf ) .
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Estimation de l’efficacite d’un bassin de decantation al’aide de processus aleatoires.
Γ1
Ω
U
Γ′
1
δ
Ω
Γ0
Γ1
Decanteur
x
y
∂c
∂t+
∂
∂x(uxc − εx
∂c
∂x) +
∂
∂y(uyc − Vc − εy
∂c
∂y) =
∂c
∂t− G∗c = 0
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Quelques conditions au fond dans la litterature
εy∂c∂y (t, x , 0) + (V − uy ) limt→+∞ c(t, x , 0) = 0
εy∂c∂y (t, x , 0) + k(V − uy )c(t, x , 0) = 0 k ∈ [0, 1]
εy∂c∂y (t, x , 0) + (V − uy )c(t, x , 0) =
A(V − uy )c(t, x , 0) , ∀ x ∈ [0, L] A : probabilite qu’uneparticule reste au fond apres l’avoir touche.
εy∂c∂y (t, x , 0) + (V − uy )c(t, x , 0) = D − E
D = (V − uy )c(t, x , 0) et E pas vraiment connue.
Toutes les particules s’arretent au fond : ∂c∂y (t, x , 0) = 0
εy∂c∂y (t, x , 0) + (V − uy )max c(., ., 0) = 0
εy∂c∂y + ρ(V − uy )c = 0
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Notre contributionCondition au fond Comportement physique
pour la concentration des particules au fond
c(x , 0) = 0 une particule qui touche le fond s’y depose
εy∂c
∂y(x , 0) + (V − uy )c(x , 0) = 0 aucune particule ne se depose
εy∂c
∂y(x , 0) + (V − uy − λ)c(x , 0) = 0 Un particule peut se deposer au fond
(λ > 0) mais apres plusieurs reflexionsλ = 1/Tmoy
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Notre contributionCondition au fond Comportement physique
pour la concentration des particules au fond
c(x , 0) = 0 une particule qui touche le fond s’y depose
εy∂c
∂y(x , 0) + (V − uy )c(x , 0) = 0 aucune particule ne se depose
εy∂c
∂y(x , 0) + (V − uy − λ)c(x , 0) = 0 Un particule peut se deposer au fond
(λ > 0) mais apres plusieurs reflexionsλ = 1/Tmoy
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Notre contributionCondition au fond Comportement physique
pour la concentration des particules au fond
c(x , 0) = 0 une particule qui touche le fond s’y depose
εy∂c
∂y(x , 0) + (V − uy )c(x , 0) = 0 aucune particule ne se depose
εy∂c
∂y(x , 0) + (V − uy − λ)c(x , 0) = 0 Un particule peut se deposer au fond
(λ > 0) mais apres plusieurs reflexionsλ = 1/Tmoy
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications
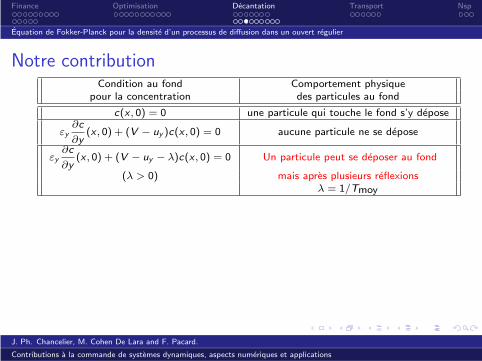
Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Notre contributionCondition au fond Comportement physique
pour la concentration des particules au fond
c(x , 0) = 0 une particule qui touche le fond s’y depose
εy∂c
∂y(x , 0) + (V − uy )c(x , 0) = 0 aucune particule ne se depose
εy∂c
∂y(x , 0) + (V − uy − λ)c(x , 0) = 0 Un particule peut se deposer au fond
(λ > 0) mais apres plusieurs reflexionsλ = 1/Tmoy
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Modele stochastique pour les particules
σ un champ de matrices et b′ un champ de vecteurs tels que :
Lφ = b′.∇φ+1
2tr(σ.σT∇2φ) = div(a∇φ) + b∇φ = Gφ.
(ys)s≥t le processus aleatoire dans Rn,
dys = b′(ys)ds + σ(ys)dws − IΓ1(ys)γ(ys)dζs , yt = x .
(ζs)s≥t est un processus scalaire continu croissant.
τ le premier temps ou le processus atteint Γo :
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications
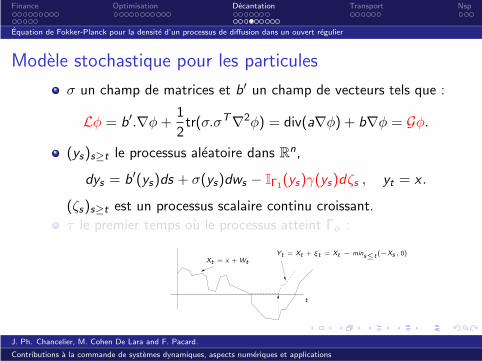
Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Modele stochastique pour les particules
σ un champ de matrices et b′ un champ de vecteurs tels que :
Lφ = b′.∇φ+1
2tr(σ.σT∇2φ) = div(a∇φ) + b∇φ = Gφ.
(ys)s≥t le processus aleatoire dans Rn,
dys = b′(ys)ds + σ(ys)dws − IΓ1(ys)γ(ys)dζs , yt = x .
(ζs)s≥t est un processus scalaire continu croissant.
τ le premier temps ou le processus atteint Γo :
Xt = x + Wt
t
Yt = Xt + ξt = Xt − mins≤t (−Xs , 0)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Modele stochastique pour les particules
σ un champ de matrices et b′ un champ de vecteurs tels que :
Lφ = b′.∇φ+1
2tr(σ.σT∇2φ) = div(a∇φ) + b∇φ = Gφ.
(ys)s≥t le processus aleatoire dans Rn,
dys = b′(ys)ds + σ(ys)dws − IΓ1(ys)γ(ys)dζs , yt = x .
(ζs)s≥t est un processus scalaire continu croissant.
τ le premier temps ou le processus atteint Γo :
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un nouveau temps de vie pour le processus ys∧τ
Grace a la fonctionnelle :
αts
def= exp(−
∫ s∧τ
tλ(yt′)dζt′)
On etend l’espace de probabilite : Ω = Ω× [0,∞] :
ξ(ω, u) = u et ys = ys∧τ
Ex ,t
[Iξ>sφ(ys , s ∧ τ )
]= E
x ,t[αts∧τφ(ys∧τ , s ∧ τ)
]pour s ≥ t.
Soit (zs) le nouveau processus :
zs =
ys si s < ξ ,
δ si s ≥ ξ
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Solution d’un probleme mixte Dirichlet-Neumann
∂tu + Gu = 0 sur Ω
u|Γ0= f et 〈γ,∇u〉+ λu|Γ1
= 0
u(x ,T ) = f (x).
(12)
u verifie u(x , t) = Ex ,t [f (zT )]
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un candidat pour la densite du processus Zt
∂tp − G⋆p = 0 sur Ω
p|Γ0= 0 et 〈γ,∇p〉+ (αγ + λ)p|Γ1
= 0
p(x , 0) = p0(x) sur Ω,
Pour p0 ∈ L2(Ω) :
Ep0,0 [f (zT )] =
∫
Ωf (x)p(x ,T )dx −
∫
Γ0×[0,T ]f 〈γ,∇p〉 dσdt.
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un dictionnaire des conditions au fond
Condition au fond Condition au fondpour la densite pour le processus
p(t, 0) = 0 arret
a(0)∂p
∂ξ(t, 0)− b(0)p(t, 0) = 0 reflexion instantanee
a(0)∂p
∂ξ(t, 0)− (b(0) + λ)p(t, 0) = 0 reflexion elastique(λ > 0)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un dictionnaire des conditions au fond
Condition au fond Condition au fondpour la densite pour le processus
p(t, 0) = 0 arret
a(0)∂p
∂ξ(t, 0)− b(0)p(t, 0) = 0 reflexion instantanee
a(0)∂p
∂ξ(t, 0)− (b(0) + λ)p(t, 0) = 0 reflexion elastique(λ > 0)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un dictionnaire des conditions au fond
Condition au fond Condition au fondpour la densite pour le processus
p(t, 0) = 0 arret
a(0)∂p
∂ξ(t, 0)− b(0)p(t, 0) = 0 reflexion instantanee
a(0)∂p
∂ξ(t, 0)− (b(0) + λ)p(t, 0) = 0 reflexion elastique(λ > 0)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Un dictionnaire des conditions au fond
Condition au fond Condition au fondpour la densite pour le processus
p(t, 0) = 0 arret
a(0)∂p
∂ξ(t, 0)− b(0)p(t, 0) = 0 reflexion instantanee
a(0)∂p
∂ξ(t, 0)− (b(0) + λ)p(t, 0) = 0 reflexion elastique(λ > 0)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Equation de Fokker-Planck pour la densite d’un processus de diffusion dans un ouvert regulier
Calculs d’efficacite
l’efficacite represente la fraction de particules ayant decante :
δ
Ux = CteyUx = Ctey
τ0
eff = P [τ0 ≤ T ] eff = P
[θ ≤ T
]
eff = (1/N)N∑
k=1
Iτ0≤T eff = (1/N)N∑
k=1
Iθ≤T
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
PrsentationFinance
OptimisationEnvironnement
TransportEnergie
Nsp/Scicoslab
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Apprentissage, rique et choix d’itineraireJ.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion in expected
intertemporal discounted utilities bandit problems. Theory and Decision,
(2008).
J.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion and optimal
strategies in a one-armed bandit problem : an application to road choice.
Transportation Science, (2007).
Controler la ventilation d’un tunnel routierJ-P. Chancelier and G. Cohen. Controle de la ventilation d’un tunnel
routier In Colloque Pierre Bernhard : Sur les Pbs de P.B., Inria
Sophia-Antipolis, (2005)J-P. Chancelier, G. Cohen, and J-B. Henniart. Control of pollutant
concentrations in a road tunnel using electric fans. In Computer Aided
Control Systems Design, Taipei, Taiwan, (2004)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Apprentissage, risque et choix d’itineraireJ.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion in expected
intertemporal discounted utilities bandit problems. Theory and Decision,
(2008).
J.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion and optimal
strategies in a one-armed bandit problem : an application to road choice.
Transportation Science, (2007).
Controler la ventilation d’un tunnel routierJ-P. Chancelier and G. Cohen. Controle de la ventilation d’un tunnel
routier In Colloque Pierre Bernhard : Sur les Pbs de P.B., Inria
Sophia-Antipolis, (2005)J-P. Chancelier, G. Cohen, and J-B. Henniart. Control of pollutant
concentrations in a road tunnel using electric fans. In Computer Aided
Control Systems Design, Taipei, Taiwan, (2004)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Apprentissage, rique et choix d’itineraireJ.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion in expected
intertemporal discounted utilities bandit problems. Theory and Decision,
(2008).
J.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion and optimal
strategies in a one-armed bandit problem : an application to road choice.
Transportation Science, (2007).
Controler la ventilation d’un tunnel routierJ-P. Chancelier and G. Cohen. Controle de la ventilation d’un tunnel
routier In Colloque Pierre Bernhard : Sur les Pbs de P.B., Inria
Sophia-Antipolis, (2005)J-P. Chancelier, G. Cohen, and J-B. Henniart. Control of pollutant
concentrations in a road tunnel using electric fans. In Computer Aided
Control Systems Design, Taipei, Taiwan, (2004)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Apprentissage, rique et choix d’itineraireJ.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion in expected
intertemporal discounted utilities bandit problems. Theory and Decision,
(2008).
J.-P. Chancelier, M. De Lara, and A. de Palma. Risk aversion and optimal
strategies in a one-armed bandit problem : an application to road choice.
Transportation Science, (2007).
Controler la ventilation d’un tunnel routierJ-P. Chancelier and G. Cohen. Controle de la ventilation d’un tunnel
routier In Colloque Pierre Bernhard : Sur les Pbs de P.B., Inria
Sophia-Antipolis, (2005)J-P. Chancelier, G. Cohen, and J-B. Henniart. Control of pollutant
concentrations in a road tunnel using electric fans. In Computer Aided
Control Systems Design, Taipei, Taiwan, (2004)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Commandes robustes aux pannes moteur pour le pilotage delanceurs
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. 23rd European Conference on
Operational Research. Bonn, (2009).
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. Conference on Optimization and
Practices in Industry,EDF, Clamart, France. (2008).
Optimiser la production dans un systeme de vallee hydraulique
J.P. Chancelier and A. Renaud. Daily generation scheduling :
decomposition methods to solve the hydraulic problems. International
Journal of Electrical Power and Energy Systems, (1994)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Commandes robustes aux pannes moteur pour le pilotage delanceurs
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. 23rd European Conference on
Operational Research. Bonn, (2009).
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. Conference on Optimization and
Practices in Industry,EDF, Clamart, France. (2008).
Optimiser la production dans un systeme de vallee hydraulique
J.P. Chancelier and A. Renaud. Daily generation scheduling :
decomposition methods to solve the hydraulic problems. International
Journal of Electrical Power and Energy Systems, (1994)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Commandes robustes aux pannes moteur pour le pilotage delanceurs
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. 23rd European Conference on
Operational Research. Bonn, (2009).
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. Conference on Optimization and
Practices in Industry,EDF, Clamart, France. (2008).
Optimiser la production dans un systeme de vallee hydraulique
J.P. Chancelier and A. Renaud. Daily generation scheduling :
decomposition methods to solve the hydraulic problems. International
Journal of Electrical Power and Energy Systems, (1994)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Modelisation et application : transport et energie
Commandes robustes aux pannes moteur pour le pilotage delanceurs
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. 23rd European Conference on
Operational Research. Bonn, (2009).
P. Carpentier, J.-P. Chancelier and G. Cohen. Robust approach for
aerospatial optimal control problems. Conference on Optimization and
Practices in Industry,EDF, Clamart, France. (2008).
Optimiser la production dans un systeme de vallee hydraulique
J.P. Chancelier and A. Renaud. Daily generation scheduling :
decomposition methods to solve the hydraulic problems. International
Journal of Electrical Power and Energy Systems, (1994)
J. Ph. Chancelier, M. Cohen De Lara and F. Pacard.
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Un probleme de choix de route
Alternative du decideur :Route S : temps deterministe xSRoute aleatoire R : temps aleatoire X de distribution νinconnue.
S (xs)
R (x1 < · · · < xn)J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Le critere a maximiser
Le decideur cherche a maximiser l’esperance de la somme desutilites temporelles actualisees :J(v(·)) =
∑+∞t=0 ρ
tU(Φ(vt ,Xt+1)), ou
Φ(vt ,Xt+1) =
xS si vt = S ,
Xt+1 si vt = R(13)
U : une fonction d’utilite strictement croissante et concave.
Contexte dynamique : observer une realisation de (Xt) permetd’acquerir de l’information sur la loi ν.
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Aversion au risques du decideur
Definition : UM plus averse au risque que UL si UM = ξ UL
avec ξ concave.
Proposition : Soient deux decideurs dont l’un est plus averseau risque que l’autre. Supposons que les deux decideurs aientpour information initiale la meme loi π0. Si la premieredecision du decideur le plus averse au risque est de choisir lebras R alors le second decideur fera de meme et cela sereproduit tant que le decideur le plus averse au risquecontinue de choisir le bras R.
Corollaire : le temps moyen passe en selectionnant le bras Rdecroıt si le degre d’aversion au risque croıt.
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Aversion au risques du decideur
Definition : UM plus averse au risque que UL si UM = ξ UL
avec ξ concave.
Proposition : Soient deux decideurs dont l’un est plus averseau risque que l’autre. Supposons que les deux decideurs aientpour information initiale la meme loi π0. Si la premieredecision du decideur le plus averse au risque est de choisir lebras R alors le second decideur fera de meme et cela sereproduit tant que le decideur le plus averse au risquecontinue de choisir le bras R.
Corollaire : le temps moyen passe en selectionnant le bras Rdecroıt si le degre d’aversion au risque croıt.
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Aversion au risques du decideur
Definition : UM plus averse au risque que UL si UM = ξ UL
avec ξ concave.
Proposition : Soient deux decideurs dont l’un est plus averseau risque que l’autre. Supposons que les deux decideurs aientpour information initiale la meme loi π0. Si la premieredecision du decideur le plus averse au risque est de choisir lebras R alors le second decideur fera de meme et cela sereproduit tant que le decideur le plus averse au risquecontinue de choisir le bras R.
Corollaire : le temps moyen passe en selectionnant le bras Rdecroıt si le degre d’aversion au risque croıt.
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Probleme de bandit manchot classique
Bras S est degenere (deterministe et de gain ΨS = xS)
L’etat du bras R est l’estimee πt a la periode t de la loi ν.
πt est un processus markovien dont les transitionscorrespondent aux mises a jour d’une estimee dues auxobservations Xt .
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
Simulation pour n = 2 avec x− < xs < x+
0 10 20 30 40 500
10
20
30
40
50
0 10 20 30 40 500
10
20
30
40
50 (G) (L)
Safe road
(relevant road)Random road
(A)
Num
ber
of g
ood
stat
es
Number of bad states
Figure: Trajectoires de la loi a posteriori quand la meilleure route est laroute aleatoire. Sur l’axe horizontal les trajets a grand temps de parcours,sur l’axe vertical les trajets a faible temps de parcours.
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Risk aversion in expected intertemporal discounted utilities bandit problems
0 10 20 30 40 500
10
20
30
40
50
0 10 20 30 40 500
10
20
30
40
50 (G) (L)
(relevant road)Safe road
Random road
(A)
Num
ber
of g
ood
stat
es
Number of bad states
Figure: Trajectoires de la loi a posteriori quand la meilleure route est laroute sure
J.-P. Chancelier, M. De Lara, and A. de Palma
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
PrsentationFinance
OptimisationEnvironnement
TransportEnergie
Nsp/Scicoslab
J.-Ph. Chancelier
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Nsp/Scicoslab
Langage de script
C. Bunks, J.-P. Chancelier, F. Delebecque, C. Gomez, M. Goursat, Ramine
Nikoukhah, and S. Steer. Engineering in scientific computing with scilab.
Birkhauser Boston, (1999).
J.-P. Chancelier, F. Delebecque, C. Gomez, M. Goursat, R. Nikoukhah, and
S. Steer. Introduction a SCILAB. Collection IRIS, Springer, 2ieme ed. edition,
(2007).
Stephen Campbell, Jean-Philippe Chancelier, and Ramine Nikoukhah. Modeling
and Simulation in Scilab/Scicos. Springer, (2006).
Stephen Campbell, Jean-Philippe Chancelier, and Ramine Nikoukhah. Modeling
and Simulation in Scilab/Scicos with ScicosLab 4.4. Springer, 2nd ed., (2010).
J.-Ph. Chancelier
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Nsp/Scicoslab
Nsp/Scicoslab
ScilabScilabGtk
ScicosabConsortium
Digito
Scicos
Scicos 4
Scicos 4.4
Scicos Pro Nsp
Nsp 1.0
J.-Ph. Chancelier
Contributions a la commande de systemes dynamiques, aspects numeriques et applications

Finance Optimisation Decantation Transport Nsp
Nsp/Scicoslab
Acces aise a de nombreux algorithmes :
Calculs en Finance, parallelisme par passage de message(MPI). J.P. Chancelier, B. Lapeyre, J. Lelong. Using Premia and Nsp for
Constructing a Risk Management Benchmark for Testing Parallel
Architecture. 23rd IEEE International Parallel and Distributed Processing
Symposium, Rome, Italy (2009). Concurrency and Computation (under
revision).
Outil de test a l’implementation de Nouveaux algorithmesnumeriques :
PGCD approxime pour les polynomes.Optimisation stochastique et arbre de scenario (K.Barty).
Acces transparents a denouvelles technologies :
calculs sur GPU, lapack, blas sur GPU.compilation a la volee.
J.-Ph. Chancelier
Contributions a la commande de systemes dynamiques, aspects numeriques et applications











![Commande numérique de systèmes dynamiques · 2018. 5. 30. · Commande numérique de systèmes dynamiques Commande numérique de systèmes dynamiques [texte imprimé]. - 2015. -](https://img.dokumen.tips/doc/110x75/6136c5820ad5d20676483bea/commande-numrique-de-systmes-dynamiques-2018-5-30-commande-numrique-de.jpg)

















