Embed Size (px)
Citation preview

Contract no.: 248231
MOSARIM
D12.1 – Study report on relevant scenarios and applications and requirements specification
Report type Deliverable
Work Group WP1
Dissemination level Public
Version number Version 1.1
Date 2010-08-06
Lead Partner Volvo Technology AB
Project Coordinator Dr. Martin Kunert
Robert Bosch GmbH Daimler Strasse 6
71229 Leonberg Phone +49 (0)711 811 37468
copyright 2010
the MOSARIM Consortium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 2/63
Authors
Name Company
Malte Ahrholdt Volvo Technology
Frantz Bodereau Autocruise
Christoph Fischer Daimler
Markus Goppelt Daimler
Robert Pietsch Continental
Andreas John Hella
Alicja Ossowska Valeo
Martin Kunert Bosch
Revision chart and history log
Version Date Reason
0.1 2010-02-18 Initial version
0.2 2010-03-23 Integrated partner contributions
0.3 2010-04-12 Integrated update from some partners
0.4 2010-04-29 revision
0.5 2010-05-19 Selection of relevant scenarios, based on partner input, minor other updates
0.6 2010-06-21 Executive summary and requirement specification
0.7 2010-06-30 Revision before peer review process
1.0 2010-07-14 Finalization before review
1.1 2010-08-06 Added more high-density scenarios after review

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 3/63
Table of contents Authors ................................................................................................................................2
Revision chart and history log........................................................................................2
Table of contents ....................................................................................................................2
Table of contents ....................................................................................................................3
1. Executive Summary........................................................................................................5
2. Relevant Vehicle Applications ........................................................................................6
2.1. Forward Sensing .....................................................................................................6
2.1.1. Adaptive Cruise Control ..................................................................................6
2.1.2. Collision Warning System...............................................................................6
2.1.3. Collision Mitigation System ............................................................................7
2.1.4. Vulnerable Road User Detection .....................................................................7
2.2. Side and rear sensing...............................................................................................8
2.2.1. Blind Spot Monitoring.....................................................................................8
2.2.2. Lane Change Assistance ..................................................................................8
2.2.3. Rear Cross Traffic Alert / Rear Cross Path Systems.........................................9
3. Scenario overview ........................................................................................................10
3.1. Forward Looking Sensor .......................................................................................10
3.2. Rear and Side Sensor ............................................................................................13
4. Relevant Scenarios in Detail: Forward Looking Sensor.................................................17
4.1. Direct interference without further target objects...................................................17
4.1.1. [D1 a/b] Standstill, short and long distance....................................................17
4.1.2. [D2a] Victim approaches interferer................................................................18
4.1.3. [D2b] Victim and interferer passing each other..............................................19
4.2. Direct interference with presence of further target objects .....................................20
4.2.1. [T1a] Standstill at intersection, target ahead ..................................................20
4.2.2. [T1b] Victim approaches target at intersection...............................................21
4.2.3. [T2a] Following a car, oncoming interferer....................................................22
4.2.4. [T2b] Oncoming interferer in road curve .......................................................23
4.2.5. [T2c] Oncoming interferer with motorcycle target .........................................24
4.2.6. [T2d] Oncoming interferer with pedestrian as target ......................................25
4.2.7. [T3a] Victim and interferer drive in parallel, target ahead..............................26
4.2.8. [T3b] Victim and interferer drive in parallel, target ahead, lane change .........27
4.2.9. [X1] Interference from crossing traffic ..........................................................28
4.2.10. [X2] High density of interferers at intersection ..............................................29
4.2.11. [X3] Roundabout...........................................................................................30
4.3. Interference with rear- or sideward-looking sensors...............................................31
4.3.1. [R1a-c] Interference with rear- / sideward-looking sensor..............................31
4.3.2. [R2] Interference with multiple rear-looking sensors .....................................33
4.4. Indirect interference scenarios...............................................................................34
4.4.1. [I1] Indirect interference with rear-looking sensor (truck)..............................34
4.4.2. [I2a/b] Indirect interference with rear-looking sensor ....................................35
4.4.3. [I3a/b] Indirect interference with multiple rear-looking sensors .....................36
[I4] Indirect interference with disturbing vehicle and presence of a guard rail ...............37
4.5. Environmental conditions......................................................................................38
4.5.1. [E1] Wet road surface....................................................................................38
4.5.2. [E2] Wet road surface....................................................................................39
5. Relevant Scenarios in Detail: Rear and Side Sensor ......................................................40
5.1. Direct interference.................................................................................................40
5.1.1. [RD1a/b]Direct interference, oncoming traffic...............................................40
[RD2a-g] Direct interference, traffic in same direction with similar velocities...............41

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 4/63
5.1.2. [RD2f] Forward looking sensor on following vehicle ....................................44
5.1.3. [RD3] Road approaches with various angles other than 90deg.......................45
5.2. Direct interference with the presence of further target objects ...............................47
5.2.1. [RT1] Victim and interferer driving in parallel, target following....................47
5.2.2. [RT2] Blind spot detection with multiple interferers ......................................48
5.2.3. [RT3] Interference with forward looking radar ..............................................49
5.3. Indirect interference ..............................................................................................50
5.3.1. [RI1] Guard Rail ...........................................................................................50
5.3.2. [RX1a-f] Intersection.....................................................................................51
5.3.3. [RP] Parking lot.............................................................................................57
6. Requirement Specification ............................................................................................58
6.1. Forward looking sensor.........................................................................................60
6.2. Rear and side sensor..............................................................................................61
7. Annex...........................................................................................................................62
7.1. Legend of Scenario Sketches.................................................................................62
7.2. Legend of Scenario Relevance ..............................................................................62
7.3. Acronyms .............................................................................................................63

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 5/63
1. Executive Summary
In order to investigate radar interference in the MOSARIM project, two types of information
have to be taken into account:
� What different traffic safety applications use automotive radar, and what consequences
does potential radar interference cause?
� In which traffic scenarios interference of radar sensors can occur?
In order to answer these crucial questions, this document first gives a list of the relevant
traffic applications in Chapter 2. Here, also the consequence of a false or missed radar
detection are explained on application level.
Then a set of relevant interference scenarios is listed in an overview in Chapter 3, and
elaborated in more details in Chapter 4 and 5. The analysis is grouped first for forward-
looking radar systems, then for rear- and/or sideward looking radar systems.
Scenarios have been selected, that are particularly relevant to be taken into account for
analysis in simulation and practical measurements, based on the partners’ experience. In
Chapter 0, standard parameters are specified for these main scenarios, which can be used for
simulation and practical testing.
The scenario selection takes into account a number of different factors, apart from the obvious
direct interference from one radar sensor to another:
– Indirect interference by radar reflection on other objects
– Potentially high density of interference sources
– Diversity of the interferences (modulations, antenna polarization, …)
– Emission power level of the interferences
– Geometry: facing one another, parallel, …
– Environment (meteorological), e.g. wet road
– Environment (static objects), e.g. guard rails or tunnels
– Targets: Different levels of target RCS
Note that in this investigation, the scenarios listed are for further investigation whether or not
interference effects occur. Also, the expected distance range relevant for interference may
vary, also depending on parameters such as antenna characteristic and the share of sensor
power relevant for interference effects.
In the selection of scenarios, only automotive radar has been taken into account. There is also
the question whether other – mainly stationary – radiation sources can act as an interferer.
This will be addressed in the projects work task 1.7 “Estimation of interference risk from
incumbent frequency users and services”.

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 6/63
2. Relevant Vehicle Applications This chapter gives an overview of functions in which radar sensing typically is used in order
to detect surrounding vehicles or objects.
2.1. Forward Sensing
Figure 1 – Forward long range sensors for car / truck
Figure 2 – Forward short range sensors for car / truck
2.1.1. Adaptive Cruise Control
Operating principle:
– Acceleration/deceleration to keep a constant distance to the vehicle in front
– ACC Stop & Go: Stops behind a stopping/stopped vehicle, follows the vehicle
when it drives on (requires driver input)
False positives:
– Erroneous acceleration/deceleration depending on distance/rel. speed of the
“false” ghost target
– E.g.: Stationary ghost target
False negatives:
– No acceleration/deceleration
– E.g.: No deceleration approaching a traffic jam
Controllability by the driver:
– Controllable, since only limited acceleration/deceleration by the function
2.1.2. Collision Warning System
Operating principle:
– Acoustical and/or optical warning
– Preparation of the braking system by building up pressure
False positives:
– Erroneous warnings
– E.g.: Stationary ghost target
False negatives:
– No warning/no building up of pressure

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 7/63
– E.g.: Approaching a traffic jam
Controllability by the driver:
– Controllable, since no autonomous braking is performed by the function
2.1.3. Collision Mitigation System
Operating principle:
– Optical and acoustical warning
– Preparation of the braking system by building up pressure
– Partial braking as haptic warning
– Activation of Passive Safety Measures (Pre-Crash)
– Increases the braking force if the driver doesn‘t generate the necessary
deceleration to avoid the collision
– Autonomous braking if the driver doesn‘t generate the necessary deceleration
to avoid the collision
False positives:
– Erroneous warnings
– Erroneous autonomous limited braking
– Erroneous autonomous full braking
– Erroneus autonomous Pre-Crash measures
– E.g.: Stationary ghost target
False negatives:
– No warning / no building up of pressure /no autonomous braking/ no Pre-Crash
measures
– E.g.: Approaching a traffic jam
Controllability by the driver:
– Limited deceleration: Controllable
– Full deceleration: Less controllable, especially reduced capability for lane
change to avoid a crash
2.1.4. Vulnerable Road User Detection
Detection of vulnerable road users (cyclists or pedestrians) in front (potentially also on the
side of the host vehicle) in order to enable warning or assist braking functions.
Operating principle:
– Pedestrian Warning
– Autonomous braking (in cooperation with other sensors)
False positives:
– Erroneous warnings
False negatives:
– No warning
– E.g.: Pedestrian not detected due to dazzling from oncoming traffic radar
sensor
Controllability by the driver:
– Depends on implementation

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 8/63
2.2. Side and rear sensing
2.2.1. Blind Spot Monitoring
Radar sensor observing adjacent lane in the area next to the host vehicle, in order to avoid
lane change collisions with traffic at approximately the same velocity.
Operating principle:
– Optical warning in / close to the respective side rear-view mirror and optional
acoustical warning
False positives:
– Erroneous warnings
False negatives:
– No warning
– E.g.: Vehicle entering the blind spot from behind
Controllability by the driver:
– Controllable, since no autonomous control is performed by the function
Figure 3 – Blind spot sensors for car / truck
2.2.2. Lane Change Assistance
Radar sensor observing the adjacent lane in the area behind the host vehicle, in order to avoid
lane change collisions with traffic approaching with a higher velocity from the rear.
This function is today normally used in cars only (as rear sensing is difficult for changing
truck-trailer combinations).
Operating principle:
– Optical warning in / close to the respective side rear-view mirror and optional
acoustical warning / Steering support
False positives:
– Erroneous warnings
False negatives:
– No warning
– E.g.: Vehicle entering the blind spot from behind
Controllability by the driver:
– Controllable

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 9/63
Figure 4 – Lane change sensors for car (not a truck use case)
2.2.3. Rear Cross Traffic Alert / Rear Cross Path Systems
Radar sensor observing the area behind the host vehicle, in order to avoid collisions with
crossing traffic when reversing, e.g. on a parking lot.
This function is normally not used in trucks (but in cars, SUVs, Space Waggons, light trucks).
Operating principle:
– Driver warning (optical and/or acoustical)
False positives:
– Erroneous warnings
False negatives:
– No warning
Controllability by the driver:
– Controllable, since no autonomous control is performed by the function

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 10/63
3. Scenario overview
This chapter presents a list of the scenarios described in detail in the chapter 4 and 5,
respectively. [In the online document, Scenarios can be navigated by [CTRL] + mouse click.]
Short legend:
Host vehicle: / Interferer vehicle:
Scenarios considered most relevant by more than one partner are marked ████,
Scenarios considered most relevant by only one partner are marked ████.
Scenarios considered as not so relevant are not marked (i.e. blank).
3.1. Forward Looking Sensor
Scenario Sketch
Direct interference without further target
objects
[D1 a/b] Standstill, short and long distance
[D2a] Victim approaches interferer
[D2b] Victim and interferer passing each
other Direct interference with presence of
further target objects
[T1a] Standstill at intersection, target ahead
[T1b] Victim approaches target at
intersection
[T2a] Following a car, oncoming interferer

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 11/63
Scenario Sketch
[T2b] Oncoming interferer in road curve
[T2c] Oncoming interferer with motorcycle
target
[T2d] Oncoming interferer with pedestrian as
target
[T3a] Victim and interferer drive in parallel,
target ahead
[T3b] Victim and interferer drive in parallel,
target ahead, lane change
[X1] Interference from crossing traffic
[X2] High density of interferers
[X3] Roundabout
Interference with rear- or sideward-
looking sensors
[R1a-c] Interference with rear- / sideward-
looking sensor
[R1a] Direct interference, traffic in same
direction with similar velocities, rear sensor
[R1b] Overtaking, forward sensing
[R1c] Overtaking, forward sensing

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 12/63
Scenario Sketch
[R2] Interference with multiple rear-looking
sensors
Indirect interference scenarios
[I1] Indirect interference with rear-looking
sensor (truck)
[I2a/b] Indirect interference with rear-
looking sensor
[I3a/b] Indirect interference with multiple
rear-looking sensors
[I4] Indirect interference with disturbing
vehicle and presence of a guard rail
Environmental conditions
[E1] Wet road surface
[E2] Wet road surface

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 13/63
3.2. Rear and Side Sensor
Scenario Sketch
Direct interference
[RD1a/b]Direct interference, oncoming
traffic
[RD1a] oncoming traffic, both sensors facing
rear
[RD1b] oncoming traffic, sensors looking to
the side
[RD2a-g] Direct interference, traffic in same
direction with similar velocities
[RD2a] Direct interference, traffic in same
direction with similar velocities, side sensor
[RD2b] Overtaking
[RD2c] Being overtaken
[RD2d] Overtaking, rear sensing
[RD2e] Being overtaken, side sensing
[RD2f] Forward looking sensor on following
vehicle
[RD3] Road approaches with various angles
other than 90deg
[RD3a]
Road approaches with various angles other
than 90deg
[RD3b]
Road approaches with various angles other
than 90deg
Direct interference with the presence of
further target objects
Kommentar [A1]: added

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 14/63
Scenario Sketch
[RT1] Victim and interferer driving in
parallel, target following
[RT2] Blind spot detection with multiple
interferers
[RT3] Interference with forward looking
radar
Indirect interference
[RI1] Guard Rail
Intersection Scenarios
[RX1a-f] Intersection
[RX1a] Intersection, sensors facing rear
[RX1b] Intersection, victim looking to the
side, interferer sensor facing rear
[RX1c] Intersection, interferer looking to the
side, victim sensor facing rear
[RX1d] Intersection, interfering vehicle
turning, interferer sensor looking to the side,
victim sensor facing rear

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 15/63
Scenario Sketch
[RX1e] Intersection, victim vehicle turning,
victim sensor looking to the side, interferer
sensor facing rear
[RX1f] Intersection, interference with
sideward looking radar
Parking lot scenarios
[RP] Parking lot
[RP1a] Parking slot, interferer sensor looking
forward
[RP1b] Parking slot, interference with
sideward-looking sensor

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 16/63
3.3. High-Densitiy of Interferer Scenarios Involving both Forward and Rear/Side Sensors
Scenario Sketch
[H1a] Congested Motorway
[H1b] Congested Motorway in tunnel
[H2] Dense urban traffic

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 17/63
4. Relevant Scenarios in Detail: Forward Looking Sensor
Legend for sketches:
4.1. Direct interference without further target objects
4.1.1. [D1 a/b] Standstill, short and long distance
Short name D1 a/b
Scenario name Standstill, short and long distance
Sketch
Duration of
occurrence [s]
Up to 180s
Frequency of
occurrence [1/h]
Up to 1800 per hour
Potential
interference effect
Occurrence of ghost targets
Main scenario
factor
Stationary host vehicle and interferer in direct field of view
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 18/63
4.1.2. [D2a] Victim approaches interferer
Short name D2a
Scenario name Victim approaches interferer
Sketch
Duration of
occurrence [s]
Up to 20s
Frequency of
occurrence [1/h]
Up to 1800 per hour
Potential
interference effect
Occurrence of ghost targets / observe S/N ratio while approaching
Main scenario
factor
Interferer approaching stationary interferer, direct field of view
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 19/63
4.1.3. [D2b] Victim and interferer passing each other
Short name D2b
Scenario name Victim and interferer passing each other
Sketch
Duration of
occurrence [s]
Up to 10s
Frequency of
occurrence [1/h]
Up to 3600 per hour
Potential
interference effect
Occurrence of ghost target
Main scenario
factor
Interfering radar sensor within host vehicle’s radar main-lobe
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 20/63
4.2. Direct interference with presence of further target objects
4.2.1. [T1a] Standstill at intersection, target ahead
Short name T1a
Scenario name Standstill at intersection, target ahead
Sketch
Duration of
occurrence [s]
Up to 180s
Frequency of
occurrence [1/h]
Up to 1800 per hour
Potential
interference effect
Loss of target (neutral vehicle)
Main scenario
factor
Stationary host vehicle and interferer, with presence of neutral vehicle
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 21/63
4.2.2. [T1b] Victim approaches target at intersection
Short name T1b
Scenario name Victim approaches target at intersection
Sketch
Duration of
occurrence [s]
Up to 20s
Frequency of
occurrence [1/h]
1800 per hour
Potential
interference effect
Loss of target (neutral vehicle)
Main scenario
factor
Interferer approaching stationary interferer, with presence of neutral
vehicle
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 22/63
4.2.3. [T2a] Following a car, oncoming interferer
Short name T2a
Scenario name Following a car, oncoming interferer
Sketch
Duration of
occurrence [s]
Up to 10s
Frequency of
occurrence [1/h]
Up to 3600 per hour
Potential
interference effect
Loss of target (neutral vehicle),
Degradation of target parameter estimation
Main scenario
Factor
Interfering vehicle is approaching and facing host vehicle
Main performance
impact
Tracking parameter accuracy, tracking
Particular
relevance
Medium
Variation: motorway traffic, with guard rail separating traffic flow directions

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 23/63
4.2.4. [T2b] Oncoming interferer in road curve
Short name T2b
Scenario name Oncoming interferer in road curve
Sketch
Duration of
occurrence [s]
Up to 10 s
Frequency of
occurrence [1/h]
Up to 100 per hour
Potential
interference effect
Host vehicle realizes false tracking because of interfering vehicle is
approaching
=> Degradation of the target parameter estimation
Main scenario
factor
Road curve
Main performance
impact
Angular accuracy, tracking
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 24/63
4.2.5. [T2c] Oncoming interferer with motorcycle target
Short name T2c
Scenario name Oncoming interferer with motorcycle target
Sketch
Duration of
occurrence [s]
Up to 10 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Tracking and/or detection of motorbike disturbed by vehicle driving in
opposite direction
=> Degradation of SNR leading to no detection of motorcycle
Main scenario
factor
Weak target: Motorbike in long range
Main performance
impacted
SNR: increasing of noise floor
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 25/63
4.2.6. [T2d] Oncoming interferer with pedestrian as target
Short name T2d
Scenario name Oncoming interferer with pedestrian as target
Sketch
Duration of
occurrence [s]
Up to 10 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Host vehicle radar disturbed by another one approaching. Host vehicle
radar detects interferer, but does not detect pedestrian
=> Degradation of SNR leading to no detection
Main scenario
factor
Weak target: pedestrian in close range
Main performance
impact
SNR: increasing of noise floor
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 26/63
4.2.7. [T3a] Victim and interferer drive in parallel, target ahead
Short name T3a
Scenario name Victim and interferer drive in parallel, target ahead
Sketch
Duration of
occurrence [s]
Up to 20s
Frequency of
occurrence [1/h]
Up to 720 per hour
Potential
interference effect
Loss of target (neutral vehicle)
Degradation of target parameter estimation
Main scenario
factor
Interferer is driving in same direction as host vehicle
Main performance
impact
Target parameter accuracy, tracking
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 27/63
4.2.8. [T3b] Victim and interferer drive in parallel, target ahead, lane change
Short name T3b
Scenario name Victim and interferer drive in parallel, target ahead, lane change
Sketch
Duration of
occurrence [s]
Up to 20 s
Frequency of
occurrence [1/h]
10 per hour
Potential
interference effect
Degradation of target parameter estimation
Main scenario
factor
Target vehicle lane change
Main performance
impact
Reactivity, target re-allocation
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 28/63
4.2.9. [X1] Interference from crossing traffic
Short name X1
Scenario name Interference from crossing traffic
Sketch
Duration of
occurrence [s]
Up to 10 s
Frequency of
occurrence [1/h]
Up to 1000 per hour
Potential
interference effect
Degradation of SNR leading to no detection
Main scenario
factor
Weak target: pedestrian in close range
Main performance
impact
SNR: increase the noise floor
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 29/63
4.2.10. [X2] High density of interferers at intersection
Short name X2
Scenario name High density of interferers at intersection
Sketch
Duration of
occurrence [s]
Up to 300 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Host vehicle is static and disturbed by many interfering radars. It
cannot detect the car or weak target (pedestrian) crossing the road
=> No detection, Blind in some areas, Sustained false target
Main scenario
factor
High density of interferers
Main performance
impact
SNR, CFAR
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 30/63
4.2.11. [X3] Roundabout
Short name X3
Scenario name Roundabout
Sketch
Duration of
occurrence [s]
Depends on the speed of the host vehicle
E.g.: 50 km/h, interference on a distance of 100 m � 7.2 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
E.g. false negatives � track might be lost � no collision warning
Main scenario
factor
Indirect interference since the sensors are not facing each other
directly
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 31/63
4.3. Interference with rear- or sideward-looking sensors
4.3.1. [R1a-c] Interference with rear- / sideward-looking sensor
Short name R1a
Scenario name Direct interference, traffic in same direction with similar
velocities, rear sensor
Sketch
Duration of
occurrence [s]
very long duration
Frequency of
occurrence [1/h]
Up to 30 per hour
Potential
interference effect
interference increased noise may make interfering vehicle invisible
Main scenario
factor
the victim driving on the same lane behind the interfering vehicle,
compare scenario [RD2f] with exchanged roles
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
High
Similar effect on a bend

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 32/63
Short name R1b
Scenario name Overtaking, forward sensing
Sketch
Duration of
occurrence [s]
1s-10s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
the victim vehicle is overtaking the interfering vehicle, victim sensor
looking forward, interfering sensor looking to the side
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low
Short name R1c
Scenario name Overtaking, forward sensing
Sketch
Duration of
occurrence [s]
1s-30s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
the victim vehicle is overtaking the interfering vehicle, victim sensor
looking forward, interfering sensor facing rear
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 33/63
4.3.2. [R2] Interference with multiple rear-looking sensors
Short name R2
Scenario name Interference with multiple rear-looking sensors
Sketch
Duration of
occurrence [s]
1s – 30 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
Multiple interferers
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 34/63
4.4. Indirect interference scenarios
4.4.1. [I1] Indirect interference with rear-looking sensor (truck)
Short name I1
Scenario name Indirect interference with rear-looking sensor (truck)
Sketch
Duration of
occurrence [s]
1s – 30 s
Frequency of
occurrence [1/h]
Up to 200 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
Interferer and truck as neutral vehicle
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 35/63
4.4.2. [I2a/b] Indirect interference with rear-looking sensor
Short name I2a/b
Scenario name Indirect interference with rear-looking sensor (guard rail)
Sketch
Duration of
occurrence [s]
1 – 30 s
Frequency of
occurrence [1/h]
Up to 1000 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
Guard rail / tunnel
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 36/63
4.4.3. [I3a/b] Indirect interference with multiple rear-looking sensors
Short name I3a/b
Scenario name Indirect interference with multiple rear-looking sensors
Sketch
Duration of
occurrence [s]
1 – 30 s
Frequency of
occurrence [1/h]
Up to 1000 per hour
Potential
interference effect
Detection disturbed by interfering radar
Main scenario
factor
Guard rail / tunnel and multiple interference sources
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 37/63
[I4] Indirect interference with disturbing vehicle and presence of a guard rail
Short name I4
Scenario name Indirect interference with disturbing vehicle and presence of guard rail
Sketch
Duration of
occurrence [s]
Up to 20 s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Non-sustained false target, detection degradation
Main scenario
factor
Guard rail
Main performance
impact
CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 38/63
4.5. Environmental conditions
4.5.1. [E1] Wet road surface
Short name E1
Scenario name Wet road surface
Sketch
Duration of
occurrence [s]
Up to 5 s
Frequency of
occurrence [1/h]
Up to 3600 per hour
Potential
interference effect
Road is wet and causes mirror effects. The host vehicle radar is
disturbed by a radar facing in the opposite direction. Tracking and
detection are degraded
=> Detection degradation, sustained false target
Main scenario
factor
Wet road
Main performance
impact
SNR, accuracy of target parameters
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 39/63
4.5.2. [E2] Wet road surface
Short name E2
Scenario name Wet road surface
Sketch
Duration of
occurrence [s]
Up to 20 s
Frequency of
occurrence [1/h]
10 per hour
Potential
interference effect
Road is wet and causes mirror effects. The host vehicle radar is
disturbed by a radar facing in the same direction. Tracking and
detection are degraded
=> Detection degradation, sustained false target
Main scenario
factor
Wet road
Main performance
impact
SNR, accuracy of target parameters
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 40/63
5. Relevant Scenarios in Detail: Rear and Side Sensor
5.1. Direct interference
5.1.1. [RD1a/b]Direct interference, oncoming traffic
Short name RD1a
Scenario name oncoming traffic, both sensors facing rear
Sketch
Duration of
occurrence [s]
1s-7s
Frequency of
occurrence [1/h]
up to 3600 per hour ,often for single lane traffic
Potential
interference effect
Reduced detection performance
Main scenario
factor
high density of sensors, direct dazzling , potentially guard rail or
tunnel
Main performance
impact
SNR, increasing of noise floor, CFAR
Particular
relevance
Low
Similar effect on a bend
Short name RD1b
Scenario name oncoming traffic, sensors looking to the side
Sketch
Duration of
occurrence [s]
1s-3s
Frequency of
occurrence [1/h]
up to 3600 per hour ,often for single lane traffic
Potential
interference effect
Reduced detection performance
Main scenario
factor
high density of sensors, direct dazzling
Main performance
impact
SNR, CFAR
Particular
relevance
Low
Similar effect on a bend

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 41/63
[RD2a-g] Direct interference, traffic in same direction with similar velocities
Short name RD2a
Scenario name Direct interference, traffic in same direction with similar
velocities, side sensor
Sketch
Duration of
occurrence [s]
10s-60s, in some cases very long duration
Frequency of
occurrence [1/h]
Up to 20 per hour
on multiple lane roads, depending on traffic
Potential
interference effect
interference increased noise may hinder detection of vehicle
Main scenario
factor
interferer on next lane with similar velocity to the victim, sensors
looking to the side
Main performance
impact
SNR, increasing of noise floor, CFAR
Particular
relevance
High
Similar effect on a bend

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 42/63
Short name RD2b
Scenario name Overtaking
Sketch
Duration of
occurrence [s]
1-10s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
interference increased noise may hinder detection of vehicle
Main scenario
factor
the interfering vehicle overtaking the victim vehicle, sensors looking
to the side
Main performance
impact
SNR, CFAR
Particular
relevance
Medium
Short name RD2c
Scenario name Being overtaken
Sketch
Duration of
occurrence [s]
1-10s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
interference increased noise may hinder detection of vehicle
Main scenario
factor
the interfering vehicle overtaken by the victim vehicle, sensor looking
to the side
Main performance
impact
SNR, CFAR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 43/63
Short name RD2d
Scenario name Overtaking, rear sensing
Sketch
Duration of
occurrence [s]
1s-10s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
interference increased noise may hinder detection of vehicle
Main scenario
factor
the victim vehicle is overtaking the interfering vehicle, victim sensor
facing rear, interfering sensor looking to the side
Main performance
impact
SNR, CFAR
Particular
relevance
Low
Short name RD2e
Scenario name Being overtaken, side sensing
Sketch
Duration of
occurrence [s]
1s-10s
Frequency of
occurrence [1/h]
up to 500 per hour
Potential
interference effect
interference increased noise may hinder detection of vehicle
Main scenario
factor
the interfering vehicle is overtaking the victim vehicle, interferer
sensor facing rear, victim sensor looking to the side
Main performance
impact
SNR, CFAR, …
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 44/63
5.1.2. [RD2f] Forward looking sensor on following vehicle
Short name RD2f
Scenario name Forward looking sensor on following vehicle
Sketch
Duration of
occurrence [s]
very long duration
Frequency of
occurrence [1/h]
Up to 30 per hour
Potential
interference effect
interference increased noise may make interfering vehicle invisible
Main scenario
factor
the interferer driving on the same lane behind the victim vehicle
compare scenario [R1a] with exchanged roles
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Medium
Kommentar [A2]: added

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 45/63
5.1.3. [RD3] Road approaches with various angles other than 90deg
Short name RD3a
Scenario name Road approaches with various angles other than 90deg
Sketch
Duration of
occurrence [s]
5s
Frequency of
occurrence [1/h]
up to 10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
two roads approaches with various angles, sensors looking to the side
Main performance
impact
SNR, increasing of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 46/63
Short name RD3b
Scenario name Road approaches with various angles other than 90deg
Sketch
Duration of
occurrence [s]
5s
Frequency of
occurrence [1/h]
10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
two roads approaches with various angles, victim sensor looking to
the side, interferer looking forward
Main performance
impact
SNR, increasing noise floor, CFAR, …
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 47/63
5.2. Direct interference with the presence of further target objects
5.2.1. [RT1] Victim and interferer driving in parallel, target following
Short name RT1
Scenario name Victim and interferer driving in parallel, target following Sketch
Duration of
occurrence [s]
20 - 40s
Frequency of
occurrence [1/h]
720 per hour
Potential
interference effect
LCA: late detection of neutral vehicle, for example detection at a
distance of 50m instead of 80m
Main scenario
factor
Target approaches victim, victim is disturbed by interferer
Main performance
impact
SNR
Particular
relevance
Medium

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 48/63
5.2.2. [RT2] Blind spot detection with multiple interferers
Short name RT2
Scenario name Blind spot detection with multiple interferers Sketch
Duration of
occurrence [s]
1-10s
Frequency of
occurrence [1/h]
Up to 1800 per hour
Potential
interference effect
BSD: Loss of neutral vehicle
Main scenario
factor
Multiple interference sources
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 49/63
5.2.3. [RT3] Interference with forward looking radar
Short name RT3a
Scenario name Interference with forward looking radar
Sketch
Duration of
occurrence [s]
Very long duration
Frequency of
occurrence [1/h]
Up to 30 per hour
Potential
interference effect
the interferer driving on the same lane behind the victim vehicle,
possible loss of target
Main scenario
factor
high density of sensors
Main performance
impact
SNR, increasing noise floor, CFAR
Particular
relevance
High
Short name RT3b
Scenario name Being overtaken, side sensing
Sketch
Duration of
occurrence [s]
1 - 40s
Frequency of
occurrence [1/h]
up to 720 per hour
Potential
interference effect
LCA: late detection of interferer, for example detection at a distance of
50m instead of 80m
Main scenario
factor
the interfering vehicle is overtaking the victim vehicle, interferer sensor
looking forward, victim sensor looking to the side
Main performance
impact
SNR, CFAR
Particular
relevance
High
MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 50/63
5.3. Indirect interference
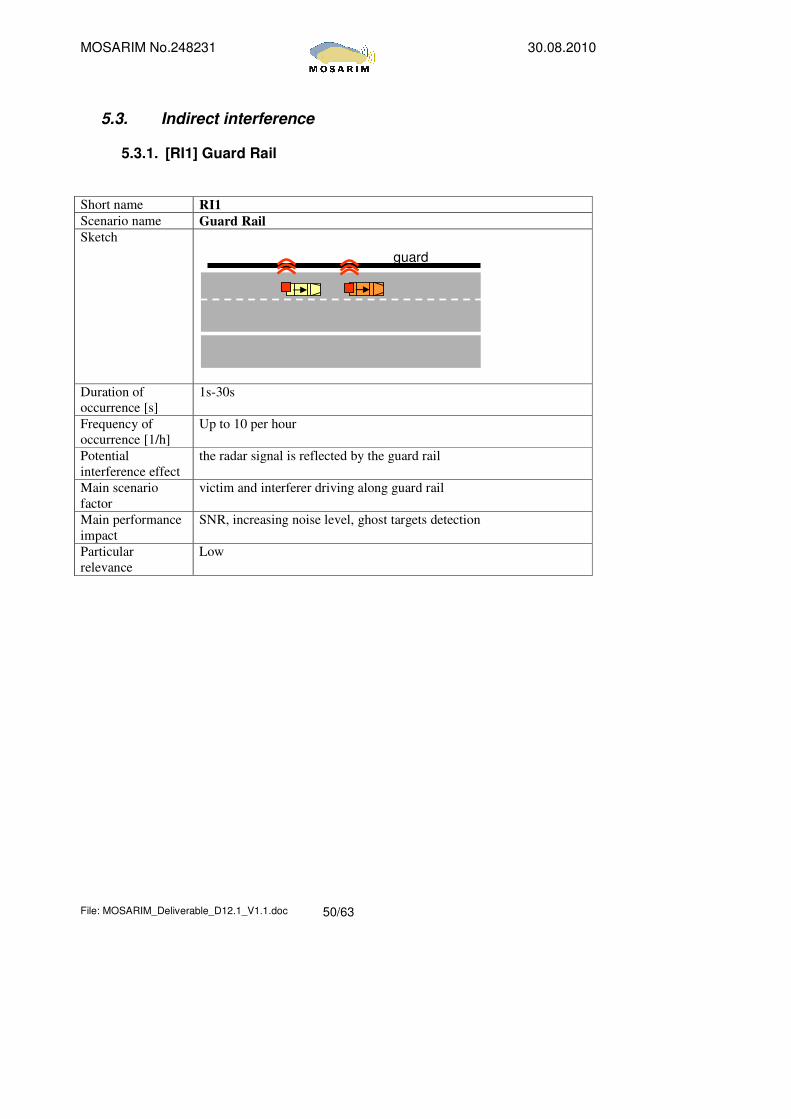
5.3.1. [RI1] Guard Rail
Short name RI1
Scenario name Guard Rail
Sketch
Duration of
occurrence [s]
1s-30s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
the radar signal is reflected by the guard rail
Main scenario
factor
victim and interferer driving along guard rail
Main performance
impact
SNR, increasing noise level, ghost targets detection
Particular
relevance
Low
guard

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 51/63
5.3.2. [RX1a-f] Intersection
Short name RX1a
Scenario name Intersection, sensors facing rear
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
Intersection, sensors facing rear
Main performance
impacted
SNR, CFAR
Particular
relevance
Low
MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 52/63
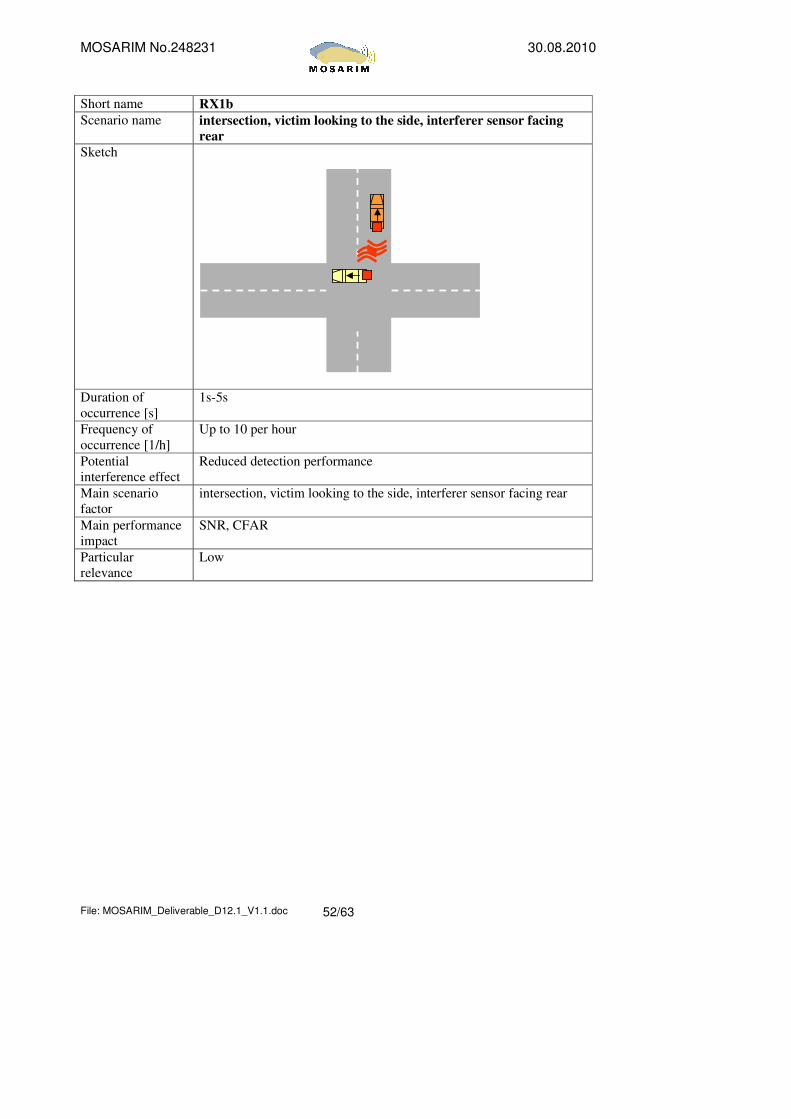
Short name RX1b
Scenario name intersection, victim looking to the side, interferer sensor facing
rear
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
intersection, victim looking to the side, interferer sensor facing rear
Main performance
impact
SNR, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 53/63
Short name RX1c
Scenario name intersection, interferer looking to the side, victim sensor facing
rear
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
intersection, interferer looking to the side, victim sensor facing rear
Main performance
impacted
SNR, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 54/63
Short name RX1d
Scenario name intersection, interfering vehicle turning, interferer sensors looking
to the side, victim sensor facing rear
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
intersection, interfering vehicle turning, interferer sensors looking to
the side, victim sensor facing rear
Main performance
impact
SNR, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 55/63
Short name RX1e
Scenario name intersection, victim vehicle is turning, victim sensor looking to the
side, interferer sensor facing rear
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 10 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
intersection, victim vehicle turning, victim sensor looking to the side,
interferer sensor facing rear
Main performance
impact
SNR, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 56/63
Short name RX1f
Scenario name Intersection, interference with sideward looking radar
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
Reduced detection performance
Main scenario
factor
high density of sensors
Main performance
impact
SNR, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 57/63
5.3.3. [RP] Parking lot
Short name RP1a
Scenario name parking slot, interferer sensor looking forward
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
interference increased noise may hinder detection of interferer
Main scenario
factor
high density of sensors, direct dazzling
Main performance
impacted
SNR, increase of noise floor, CFAR,
Particular
relevance
High
Short name RP1b
Scenario name Parking slot, interference with sideward-looking sensor
Sketch
Duration of
occurrence [s]
1s-5s
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
interference increased noise may hinder detection of interferer
Main scenario
factor
parking slot, interferer sensor looking to the side
Main performance
impact
SNR, increase of noise floor, CFAR
Particular
relevance
Low

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 58/63
6. Relevant Scenarios in Detail: High-Density of Interferer Scenarios Involving both Forward and Rear/Side Sensors
6.1.1. [H1a] Congested Motorway
Short name H1a
Scenario name Congested Motorway
Sketch
Duration of
occurrence [s]
Long term
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
Host vehicle is disturbed by many interfering radars.
Target detection disturbed, risk for false object detection.
Main scenario
factor
high density of interferers
Main performance
impacted
SNR, increase of noise floor, CFAR,
Particular
relevance
High
Kommentar [A3]: added

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 59/63
6.1.2. [H1b] Congested Motorway in tunnel
Short name H1b
Scenario name Congested Motorway in tunnel
Sketch
Duration of
occurrence [s]
Long term
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
Host vehicle is disturbed by many interfering radars.
Target detection disturbed, risk for false object detection.
Main scenario
factor
high density of interferers
Main performance
impacted
SNR, increase of noise floor, CFAR,
Particular
relevance
High
6.1.3. [H2] Dense urban traffic
Short name H2
Scenario name Dense urban traffic
Sketch
Duration of
occurrence [s]
Long term
Frequency of
occurrence [1/h]
Up to 5 per hour
Potential
interference effect
Host vehicle is disturbed by many interfering radars.
Target detection disturbed, risk for false object detection.
Main scenario
factor
high density of interferers, different sizes of objects, including
motorcycles and VRU
Main performance
impacted
SNR, increase of noise floor, CFAR,
Particular
relevance
High
Kommentar [A4]: added
Kommentar [A5]: added

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 60/63
7. Requirement Specification This section summarises the main scenarios identified in the work package, as shown in the
table of chapter 3, and gives a set of standard parameters that can be used in simulation and/or
testing scenarios.
7.1. Forward looking sensor
Scenario Sketch
[D2b] Victim and interferer passing each
other
Scenario main parameters:
Relative velocity: -20, -40, -100, -200 km/h
[T2c] Oncoming interferer with motorcycle
target
Scenario main parameters:
Relative velocity: -20, -40, -100, -200 km/h
Target distance: 40 m
[T2d] Oncoming interferer with pedestrian as
target
Scenario main parameters:
Host velocity: 20 km/h, 50 km/h
Relative velocity: -20, -40, -100 km/h
Distance to pedestrian when starting to cross
road: 20 m, 50 m
High densitiy of interferers
[X2] High density of interferers
[H1a] Congested Motorway
[H1b] Congested Motorway in tunnel
[H2] Dense urban
Scenario main parameters:
Numbers, distance and direction of
interfering vehicles (depends on availability,
t.b.d.)
[R1a] Direct interference, traffic in same
direction with similar velocities, rear sensor
Scenario main parameters:
Host velocity: 50 km/h
Relative velocity: 0 km/h
Distance: 15 m

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 61/63
7.2. Rear and side sensor
Scenario Sketch
[RD2a] Direct interference, traffic in same
direction with similar velocities, side sensor
Scenario main parameters:
Relative velocity : 0 km/h
[RT2] Blind spot detection with multiple
interferers
Scenario main parameters:
Relative velocity : 0 km/h
[RT3] Interference with forward looking
radar
Scenario main parameters:
Host velocity: 50 km/h
Relative velocity: 0 km/h
Distance: 15 m
[RP1a] parking slot, interferer sensor looking
forward
Scenario main parameters:
Host velocity: <5 km/h
Interferer velocity: 20 km/h

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 62/63
8. Annex
8.1. Legend of Scenario Sketches
8.2. Legend of Scenario Relevance None of the partners considers this disturbance scenario to be among the most relevant for
interference evaluation:
Particular
relevance
Low
One partner considers this disturbance scenario to be among the most relevant for interference
evaluation:
Particular
relevance
Medium
More than one partner considers this disturbance scenario to be among the most relevant for
interference evaluation:
Particular
relevance
High

MOSARIM No.248231 30.08.2010
File: MOSARIM_Deliverable_D12.1_V1.1.doc 63/63
8.3. Acronyms
BSD Blind Spot Detection
CFAR Constant False Alarm Rate,
radar detection threshold algorithm
LCA Lane Change Assist
RCS Radar Cross Section
SNR Signal-to-Noise Ratio






















![ICT- 257626 ACROPOLIS Date: 28/09/2012 - CORDIS · ICT- 257626 ACROPOLIS Date: 28/09/2012 ICT-ACROPOLIS Deliverable D12.3 2/42 Deliverable D12.1 [1] presented, among others, 10 case](https://img.dokumen.tips/doc/110x75/5f22d745c427ac53fa441db2/ict-257626-acropolis-date-28092012-cordis-ict-257626-acropolis-date-28092012.jpg)