Embed Size (px)
Citation preview

Computers and Structures 134 (2014) 1–17
Contents lists available at ScienceDirect
Computers and Structures
journal homepage: www.elsevier .com/locate /compstruc
Concurrent aerostructural topology optimization of a wing box
0045-7949/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.compstruc.2013.12.007
⇑ Corresponding author. Tel.: +1 212 854 1583.E-mail address: [email protected] (K.A. James).
Kai A. James a,⇑, Graeme J. Kennedy c, Joaquim R.R.A. Martins b
a Columbia University, Department of Civil Engineering and Engineering Mechanics, New York, NY, United Statesb University of Michigan, Department of Aerospace Engineering, Ann Arbor, MI, United Statesc Guggenheim School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA, United States
a r t i c l e i n f o a b s t r a c t
Article history:Received 7 February 2013Accepted 13 December 2013
Keywords:Topology optimizationMultidisciplinary optimizationAerostructural designCoupled adjoint sensitivity analysisNewton–Krylov methods
This paper presents a novel multidisciplinary framework for performing shape and topology optimizationof a flexible wing structure. The topology optimization is integrated into a multidisciplinary algorithm inwhich both the aerodynamic shape and the structural topology are optimized concurrently using gradi-ent-based optimization. The optimization results were compared with the results of a sequential proce-dure in which the aerodynamic shape was optimized separately and then used as a fixed design feature ina subsequent structural optimization. The results show that the concurrent approach offers a significantadvantage, as this design achieved 42% less drag than the sequentially optimized wing.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
Aircraft design is a complex, multidisciplinary endeavor thatplaces unique and aggressive demands on the engineers and scien-tists involved. This is especially true in the case of aircraft wing de-sign. Historically, the need for light-weight, multifunctionalaerospace structures has pushed the limits of the available materi-als and technology. As a result, numerical analysis and optimiza-tion methods have long played a major role in aircraft design,both in industry and among academic researchers. Over the lastdecade, topology optimization has emerged as one of several opti-mization techniques being used by most of the major aircraft man-ufacturers due to its ability to generate light-weight conceptualdesigns [1–4].
Perhaps the most prominent example of topology optimizationfor aircraft design is that of the Airbus A380, where topology opti-mization was used to optimize inboard fixed leading edge ribs aswell as the fuselage door intercoastals [1]. For the wingbox ribs,engineers minimized structural compliance subject to fixed aero-dynamic loading. The resulting structural layout was then refinedusing sizing and shape optimization. It is estimated that the useof topology optimization led to an overall weight savings of1000 kg per aircraft [2]. More recently, Bombardier has also begunincorporating topology optimization into the premilinary design ofairplane structures. For one study published in 2007 [3], Bombar-dier engineers satisfied the aerodynamic design requirements byselecting 20 criticial aerodynamic load cases that were used as
design loads for two-dimensional optimization of wingbox ribtopologies. A similar procedure has also been adopted by Boeingfor the design of the leading edge wingbox ribs used in the 787Dreamliner. Here, the combination of topolopgy optimization dur-ing the premilinary design phase, together with subsequent sizingand shape optimization, resulted in a leading edge structure thatwas 24–45% lighter than that of the 777 aircraft [4].
Although aircraft companies rarely publish the details of theirdesign procedures [5], there is little evidence to suggest that anyof the major aircraft manufacturers have incorporated multidisci-plinary design optimization (MDO) techniques into the prelimin-ary design optimization process on any significant scale. One ofthe few examples came in the form of a NASA study that presentedresults from a high-fidelity aerostructural analysis software systemand introduced a framework for incorporating this software into amultidisciplinary optimization system [6]. By contrast, the typicalairframe design cycle practiced in industry involves a sequentialprocedure that begins with a pure aerodynamic shape optimiza-tion. For this step, many aircraft manufacturers have used the‘‘FLO’’ software [7], which includes a series of codes for performingcomputational fluid dynamics (CFD) analysis and computing shapesensitivities. This procedure is then followed by a refinement of thestructural design using loads based on the aerodynamically opti-mized shape.
True multidisciplinary optimization for the design of aerospacestructures continues to be confined mainly to academic research,where many researchers have published studies showing the useof fully coupled aerostructural analysis in their design optimiza-tion algorithms [8,9]. There have also been several examples ofresearchers using combining topology optimization with coupled

2 K.A. James et al. / Computers and Structures 134 (2014) 1–17
aerostructural analysis. In their 2004 article, Maute and Allen [10]optimized the conceptual structural layout of a wing planform.Treating the wing as a flat plate, they used topology optimizationto determine the location of a series of stiffeners. Here the masswas minimized subject to constraints on lift, drag, and tip deflec-tion. In this example, the aerodynamic loads were coupled to thestructural deflection. The resulting coupled aerostructural systemwas solved using a Newton-type method, with an adjoint methodused to compute the derivatives. A subsequent paper, coauthoredby Maute and Reich [11], used a similar aerostructural frameworkfor optimizing the material distribution and the placement of actu-ators inside a quasi-three-dimensional morphing airfoil in order tominimize drag on the deformed airfoil shape. More recently, Stan-ford and Ifju [12] used topology optimization to design the layoutof a two-material membrane-skeleton structure, which formed thewing of a micro air vehicle. Here they sought to maximize the lift-to-drag ratio using an unconstrained formulation. This examplealso included aerostructural coupling with a vortex lattice methodused to compute the aerodynamic forces.
These examples have successfully demonstrated the usefulnessof topology optimization for designing aircraft structures. How-ever, each of these studies has been limited to problems involvingtwo-dimensional design domains, and, with the exception ofMaute and Reich [11], they have focused only on the design ofthe structural topology while keeping all other aspects of the de-sign fixed. As a result, these techniques fail to fully exploit the po-tential of the method. The approach presented in this paperintegrates topology optimization into a full MDO framework inwhich the aerodynamic shape is also optimized. In this way, theprocedure is able to explore the interplay between the structuraland aerodynamic response of the design. In order to achieve this,we implement a computational solver for performing coupledaerostructural analysis along with an adjoint solver for performingcoupled sensitivity analysis.
In addition to focusing exclusively on the structural design, theabove-mentioned studies have an additional drawback in that theylimit the design region to predetermined, two-dimensional zones(e.g. the area inside the rib). In an earlier study by Bayandoret al. [13], it was shown that superior designs could be achievedby optimizing the topological layout of the ribs and spars prior tooptimizing the internal design of each component. In a proceduresimilar to that employed by Boeing [4], Bombardier [3] and Airbus[1], they performed topology optimization on the structural layoutof an aircraft Krueger flap, and then optimized the thicknesses andlay-up configurations of the composite laminates used in eachcomponent. The present study focuses on the first step in the aboveprocedure, (i.e. the conceptual design of the structural layout of aswept wing). We combine the three-dimensional design approachwith multidisciplinary analysis and optimization, to optimize thefull three-dimensional region inside the wingbox. Therefore, theoptimizer is able to distribute material anywhere inside this regionwith no assumptions being made a priori about the number orplacement of ribs and spars. This three-dimensional approach pro-vides increased flexibility and allows for the possibility of uncon-ventional structural configurations. At the same time, thisapproach entails a much larger number of finite elements, andtherefore it necessitates the implementation of an efficient algo-rithm for solving the coupled aerostructural analysis problem. Inthe results presented, we use an approximate Newton–Krylovmethod, which is implemented in parallel.
Fig. 1. MDF architecture for a generalized aerostructural problem.
2. Concurrent aerostructural design optimization
The simulation and evaluation of the performance of aircraftwings is inherently a multiphysics problem. At the minimum, it
requires an aerodyanmic solver and a structural analysis modelto determine the aerodynamic forces on the wing, as well as astructural model to determine the structural response of the wingto the aerodynamic loads. These two tasks are coupled since thestructural deflection of the wing contributes to its effective aerody-namic shape, thus influencing the nature of the aerodynamicforces. Therefore, when performing computational design optimi-zation of a wing, it is important that the aerodynamic and struc-tural analysis modules take this coupling into account.Furthermore, because of this coupling, it is important to optimizethe structural design and the aerodynamic shape concurrently sothat the optimizer can make use of the interplay between thesetwo closely related aspects of the design [8].
Previous efforts at topology optimization of aeroelastic struc-tures were limited to problems in which the jig shape of the wing’saerodynamic outer surface was fixed. Note that jig shape refers tothe geometric shape of the wing exterior when no loading or struc-tural deformation is present. Therefore, although several of theprevious studies accounted for the elastic deflection of the wingwhen modeling the aerodynamic loads, none of them sought tooptimize the jig shape, which remained ‘‘fixed’’ from an optimiza-tion standpoint. This can be seen as a form of sequential optimiza-tion in which the outer shape of the wing is optimized at an earlierstage of the design process, and the optimized shape is treated as afixed design feature when optimizing the internal structure of thewing. As shown by Martins et al. [8] and Chittick and Martins [9],this form of sequential optimization leads to suboptimal designs.Therefore, the current study improves upon previous methods byintegrating shape optimization into the aerostructural topologyoptimization algorithm. These results are then compared withsequentially optimized designs in order to better understand andquantify the benefits of the concurrent MDO approach.
In this context the terms ‘‘optimal’’ and ‘‘suboptimal designs’’refer to mathematical optima, which are optimal only with respectto the specific optimization problem as defined in (18). This is notthe same as finding the ‘‘best possible’’ design, as it may be possi-ble to improve upon the mathematically optimized designs byintroducing additional design variables, objectives, or constraints.The problem definition used in this study was chosen as a wayto investigate specific trends related to MDO and to demonstratethe advantages of concurrent optimization when compared withprevious approaches.
In order to solve the aerostructural optimization problem, weimplement an MDO algorithm that is based on the multidisciplinaryfeasible (MDF) architecture [14]. A diagram of the algorithm archi-tecture is shown in Fig. 1. This approach solves the coupled

0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
ρ
ρp
p = 0.5
p = 1
p = 2
p = 0.3
p = 10
p = 0.25
Fig. 2. The SIMP penalization function.
K.A. James et al. / Computers and Structures 134 (2014) 1–17 3
aerostructural system to full convergence in each optimizationiteration. Therefore the optimizer plays no role in solving the aero-structural analysis problem and has no knowledge of the solutionprocess. For this study, we use the SNOPT optimizer [15], whichis designed to solve large-scale problems using a sequential qua-dratic programming algorithm.
As indicated in Fig. 1, the aerodynamic and structural analysismodels are coupled via the aerodynamic forces, F, and the struc-tural displacements, u. In the diagram, the design variable is repre-sented by x. The objective function is denoted by f, and the equalityand inequality constraints by ~c and c, respectively. (Note that Fig. 1describes the general architecture of the algorithm, and thereforethe variables f ; c, and x can represent any arbitrary objective func-tion, constraint function and design variable vector respectively.The specific choice of f, c, and x must be chosen by the designerto achieve targeted design goals. Sections 3 and 6 contain detaileddiscussions of specific objective, constraints, and design variablesused in this study.) The MDF architecture is well-equipped to han-dle the strong interdisciplinary coupling associated with aerostruc-tural problems [16,17], and is also adept and handling large-scaleoptimization tasks of the sort encountered in topology optimiza-tion problems.
3. Wing design parameterization
The concurrent design approach requires the use of design vari-ables that capture both the structural and aerodynamic design fea-tures of the wing. The structural aspect of the design task focuseson the structural topology, which is parameterized using the SIMPmethod [18–20]. In accordance with the SIMP approach, the designvariables are a series of material densities, which are denoted byqe 2 ½0;1�. Each node in the finite element mesh is assigned itsown density variable, qe, and the element shape functions are usedto construct a continuous density field. This formulation is knownto avoid the checkerboard instabilities associated with uniformdensity element [21]. The node-based density formulation alsoprovides us with an extra layer of density information in eachdimension, so that we may achieve slightly higher resolution inthe optimized density distributions, without increasing the com-putational cost of the structural analysis problem. Regions inwhich q � 0 are interpreted as being void of material, while re-gions where q ¼ 1 are interpreted as being solid. Because interme-diate density values are a mere mathematical tool for representingnon-physical states, the SIMP formulation penalizes intermediatedensities using an exponential penalty function, which is used tocalculate the effective Young’s modulus, Ee, of the material asfollows.
Ee ¼ qpi E0; ð1Þ
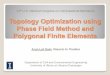
where E0 is the Young’s modulus of the bulk material, and p is theSIMP penalization factor, which is typically chosen to lie in therange 3 6 p 6 5. Fig. 2 shows a plot of the penalty function qp. FromEq. (1), the value of this function is equivalent to the ratio of theeffective Young’s modulus to the actual Young’s modulus of thesolid material (i.e. E=E0). As shown in the plots, when p > 1, ele-ments whose material density is in the intermediate range(i.e.0:2 < q < 0:8) exhibit a reduced stiffness-to-weight ratio. Thisencourages the optimizer to eliminate intermediate density valuesfrom the structure, causing the algorithm to converge to a solutionthat contains only fully solid, or fully void elements.
To address the problem of mesh-dependence, a common prob-lem associated with the standard SIMP formulation, we use a den-sity filter based on the technique proposed by Bruns and Tortorelli[22]. Therefore, rather than optimizing the material densities di-rectly, we define an auxiliary vector of structural design variables,
xs, which will be directly modified by the optimizer, and whichfully defines the density field. Note that xs has the same lengthas the vector q, and the values xsi
have the same range as qi, (i.e.0 < qmin 6 xsi
� 1). Therefore, the variables fxsig can be thought
of as a set of pseudo-densities, from which the filtered densities,fqig are determined by taking a weighted average of the valuesxi within a given radius, as shown in Eq. (3).
xsi¼X
j2Xfilt
hijqj: ð2Þ
Here, Xfilt denotes the region inside the filter radius. The influ-ence coefficients hij are inversely proportional to the distancebetween nodes, i and j in the finite element mesh. These coeffi-cients are evaluated once at the beginning of the optimization,and then stored in a matrix, H. This matrix is then used to deter-mine the current material densities based on the updated designvariable vector, xs after each optimization step as follows
xs ¼ Hqj: ð3Þ
Note that when written without the subscript, the symbol ‘‘x’’represents a composite, global design vector containing all designvariables, (i.e. x ¼ fxs; p;ag).
The node-based density formulation raises the question of howto determine the precise location of the material boundary. How-ever, this problem is not unique to the node-based formulation,since any algorithm that uses mesh-independency filtering(whether node-based or containing uniform density elements) willinevitably produce designs with poorly defined material bound-aries. One way to determine the precise boundary location is touse thresholding [23], where one selects a threshold density value,which determines the cut-off between fully solid and fully void re-gions. This threshold is generally chosen as the value that main-tains the mass of the structure. However, in most instances,topology optimization is used only to provide a structural layout.Therefore, extensive post-processing is performed, including sizingoptimization of the structural members, in which case, threshold-ing is no longer necessary.
We use a continuation method, which continuously increasesthe SIMP penalization factor over the course of the optimization.This strategy has been shown to reduce the likelihood of conver-gence to a local minimum [24]. However, in the context ofaerostructural optimization, the continuation method serves anadditional purpose. The SIMP approach typically involves

(a) planform view (b) airfoil view
Fig. 3. Outer mold line of the baseline CRM wing model (semispan = 29.38 m).
4 K.A. James et al. / Computers and Structures 134 (2014) 1–17
beginning with a uniform, intermediate density field (i.e.,qi ¼ 0:38i). In the absence of a continuation method, the initialstructure is fully penalized (i.e. p ¼ 4). In this case, the effectiveYoung’s modulus would be 127 times smaller than that of the bulkmaterial, which would result in large, unrealistic deflections. In thecase of an aeroelastic structure in which the loads are dependentupon the structure’s deflected shape, such large deflections cancause the aeroelastic analysis, and possibly the entire optimizationprocedure, to diverge.
By contrast, when implementing a continuation method, theinitial structure is unpenalized, which leads to more manageabledeflections. However, continuation methods can also lead to sev-eral numerical challenges. Because the typical continuation meth-od involves arbitrary increases in the penalization parameterduring the optimization, the objective and constraint functions un-dergo discontinuous jumps. This may cause the design to suddenlybecome infeasible, which in turn may trigger premature termina-tion of the algorithm. This approach is also computationally ineffi-cient as it slows down the algorithm’s convergence [25].Furthermore, when using a quasi-Newton optimization algorithmssuch as SNOPT, this discontinuous change in the problem defini-tion can invalidate the Hessian approximation, which may alsoforestall convergence.
In order to avoid these numerical instabilities, the aerostructur-al optimization procedure described below uses a novel, optimizer-based continuation method developed and introduced specificallyfor the problems dealt with in this study. The method is fully con-tinuous and requires no adjustments to the definition of the opti-mization problem once the optimization has started. Under thismethod, the SIMP penalization parameter, p, is treated as a designvariable. We then enforce the following equality constraint:
ðp� p�Þr ¼ 0; r > 1: ð4Þ
Here, p� is the target final value of the penalization parameter,which we have chosen as p� ¼ 3. In order to ensure that the baselinedesign exhibits satisfactory stiffness, the penalization factor is ini-tialized such that p0 ¼ 0:2. As the optimizer attempts to satisfythe above constraint, the penalization parameter will gradually ap-proach its target value. One can increase the speed with which p ap-proaches p�, by decreasing the exponent r. In the examplespresented, the constant r is set to r ¼ 8.
The outer shape of the wing is based on the Common ResearchModel (CRM), a wing-body-tail configuration developed to providea standard model with which researchers could validate their CFDcodes [26] (see Fig. 3). The CRM model includes a transonic super-critical wing designed for aerodynamic performance at high sub-sonic speeds. The wing’s swept-back design causes it to twistconsiderably under aerodynamic loading, due to bend-twist
coupling. Therefore, this wing provides a good case study forexamining the effects of aerostructural coupling and evaluatingthe benefits of the MDO approach being used.
The geometric shape of the wing’s outer surface (i.e. the aerody-namic surface) is optimized by varying the twist distribution of thewing, while the planform and airfoil shapes remain fixed. The de-sign variables used to control the twist distribution (and thereforedescribe the aerodynamic shape of the wing) are a set of eight jigtwist angles fajg, which represent the orientation (i.e. pitch anglerelative to the horizontal) of the wing’s airfoil at equally spacedlocations along the span. These angles are interpolated linearly toproduce a continuous twist profile along the span of the wing.The local angle of attack, alocal, at a given location along the spanis equal to the sum of the aircraft angle of attack, a0; the jig twistangle, aj; the twist due to structural deflection, as; and the inducedangle of attack, ai, due to downwash, i.e.,
alocal ¼ a0 þ aj þ as � ai: ð5Þ
During each optimization step, the finite element mesh iswarped to conform to the jig shape of the current outer mold line.Shape changes on the surface of the wingbox are propagatedthrough the finite element mesh using a free-form deformationtechnique [27,28]. By optimizing the jig twist, the goal is to takeadvantage of the interplay between the structural and aerody-namic responses of the wing, and ultimately generate significantimprovements over the baseline CRM design.
4. Aerostructural analysis
Solving the coupled aerostructural system is one of the mainchallenges of the concurrent multidisciplinary topology optimiza-tion method. The governing equations from the aerodynamic andstructural analysis models combine to form a nonlinear systemof equations, which we solve efficiently using a combination ofparallel iterative numerical methods. This section describes thetheory and implementation of this procedure in detail.
4.1. Aerodynamic analysis
The aerodynamic loads are computed using the TriPan softwarepackage [29], an unstructured three-dimensional panel code. Tri-Pan models inviscid, external lifting flows governed by the Pra-ndtl–Glauert equation using constant source and doubletsingularity elements distributed over the lifting surface and con-stant doublet elements distributed over the wake. For a discretizedproblem containing N panels, one obtains an N-dimensional vectorof aerodynamic residuals, A, which are linear functions of the dou-blet strengths, w, associated with each panel on the lifting surface.

K.A. James et al. / Computers and Structures 134 (2014) 1–17 5
Therefore, the governing equation of the aerodynamic system canbe represented in vector form as
AðwÞ ¼ 0; A;w 2 RN: ð6Þ
Once the unknowns, w, are found, the surface pressure distribu-tion is determined from the distribution of doublet strengths. Theaerodynamic forces and moments are then calculated by integrat-ing the local pressure values over the surface of the wing. Fig. 4shows the CRM wing with the TriPan mesh used to solve for allaerodynamic forces in this study.
The use of a panel method allows for the rapid solution of theaerodynamic forces, thus making the coupled aerostructural anal-ysis, and the optimization procedure converge more quickly. Thetrade-off for these time savings is the loss of accuracy. In particular,the panel method is unable to predict stall, viscous drag, and wave
Fig. 4. The CRM wing with the TriPan surface mesh.
Fig. 5. The structural wingbox and finite element mesh for the CRM wing.
drag. However, this is an acceptable trade-off, as the focus here ison the aerodynamic benefits of a lighter structure and optimizedtwist distribution, which mainly affect the induced drag. The alter-native to a panel method would be to use CFD methods [30], whichare generally more accurate, and are capable of capturing viscouseffects. However, for problems of this size, the TriPan solution isseveral orders of magnitude less expensive than CFD, both in termsof memory requirements and computation time [31].
4.2. Structural analysis
The finite element mesh is comprised of eight-node, linear,hexahedral isoparametric elements. Fig. 5 shows the structuralwingbox and the finite element mesh used in the structural analy-sis. The consistent force vector due to the aerodynamic pressureloads is a function of the structural and aerodynamic state vari-ables, denoted by u and w, respectively. The resulting structuralgoverning equation is expressed in vector form as
SðuÞ ¼ KðqÞu� Fðw;uÞ ¼ 0; ð7Þ
where S is the structural residual, K is the global stiffness matrix,and q is the vector of relative material densities. The assembly ofthe stiffness matrix and the solution of the linear algebraic systemare performed using the TACS software tool, a parallel finite elementcode [29].
4.3. Load and displacement transfer
The forces and displacements are transferred using the tech-nique that was originally introduced by Brown [32], and has sincebeen used for high-fidelity aerostructural optimization[29,33,30,34]. In this approach, the displacements along the outersurface of the structural mesh (computed using finite elementanalysis) are extrapolated to the aerodynamic mesh through a ser-ies of rigid links. These rigid links extend from the aerodynamicsurface mesh points to the nearest points on the structural surface.In most instances, therefore, the rigid links are not connected di-rectly to the structural nodes but instead are located on the surfaceof the structural elements. The extrapolated displacements, ~uA, area function of the displacements and rotations at the structural sur-face, and can be written as follows
~uA ¼ ~us þ~hs �~r; ð8Þ
where ~us and ~hs are the displacement and rotation at the nearestpoint on the finite element mesh, and the vector ~r represents thelength and direction of the rigid link connecting the surface of thestructural mesh to the current point on the undeformed aerody-namic surface. Conversely, given the pressure distribution alongthe aerodynamic surface, the corresponding nodal forces acting onthe finite element mesh are derived from the displacement extrap-olation scheme using the principle of virtual work. This ensures thatthe force and displacement transfer scheme is consistent andconservative.
4.4. The coupled Newton–Krylov method
The aerodynamic and structural residual equations combine toform a nonlinear global system of residual equations given by
R ¼Aðu;wÞSðu;wÞ
� �¼ 0: ð9Þ
Under the current scheme, this equation is solved iteratively usingNewton’s method, in which the Newton update of the global statevector, y ¼ ½wT uT �T , is obtained by solving the following linearsystem.

Table 1Sample adjoint sensitivity results for the aerostructural problem.
Drag Lift Compliance
Central difference method 55.95073679 1003.612219 954479.4238Adjoint method 55.95075349 1003.616505 954475.8612
6 K.A. James et al. / Computers and Structures 134 (2014) 1–17
@R@y
DyðnÞ ¼ �RðyÞ: ð10Þ
This equation is solved using the flexible variant of the Krylov sub-space method GMRES [35,36], with a block preconditioner con-structed from aerodynamic and structural preconditioners. Theaerodynamic preconditioner is a block-Jacobi method where the lo-cal preconditioner on each processor is ILU (0) [37]. The structuralpreconditioner is the approximate Schur method of Saad and Soso-nikina [38], which employs an inexpensive approximation of theglobal Schur complement formed from an ILU (p) factorization oneach processor. An approximate global Schur complement systemis solved during each application of the preconditioner usingGMRES. As a result, a flexible Krylov method is required due tothe nonstationary nature of the preconditioner.
4.5. The coupled adjoint method
Due to the large number of design variables, an adjoint analyt-ical method is used to compute the gradients required by the opti-mizer. In this case, it is important to use a coupled adjoint methodwhose gradients account for the interaction between the aerody-namic and structural behavior of the design. The total sensitivityof a function, f, with respect to the vector of design variables, x,can be expressed as
dfdx¼ @f@x� wT @R
@x; ð11Þ
where the adjoint vector, w, is found by solving the adjointequation,
@RT
@yw ¼ df
dy: ð12Þ
In an analogous fashion to the linear Newton system (10), this equa-tion is solved iteratively using preconditioned flexible GMRES. Thesame preconditioning technique is used for both the adjoint systemand the Newton update (10).
In Eq. (12) the partial derivatives in the Jacobian matrix, @R=@y,are evaluated using exact methods without recourse to finite-dif-ferencing. The diagonal blocks @S=@u and @A=@w are obtained ana-lytically. Matrix–vector products containing the off-diagonalblocks are computed by defining each submatrix as the productof two simpler partial derivative terms using the chain rule,
@AT
@u¼ @AT
@XA
@XA
@u; ð13Þ
@ST
@w¼ @ST
@FA
@FA
@w; ð14Þ
where the intermediate variable, XA, represents the node locationsof the panel mesh, and the variable, FA, represents the forces onthe aerodynamic surface. With the exception of @AT
=@XA, each ofthese terms is sparse and can be evaluated efficiently [29].
The sensitivities computed using the adjoint method are veri-fied by comparing them with finite difference results. We have ver-ified our sensitivity analysis calculations by computing thedirectional derivative of each objective and constraint functionwith respect to the vector of design variables, x, along a randomlygenerated vector, b. Given a function, f, which is defined in an n-dimensional design space Rn, the directional derivative (i.e. therate at which the function changes along the direction b 2 Rn atthe point x) is given by the following identity [39].
rbf ðxÞ ¼ @f ðxÞ@x� b ¼ lim
h!0
f ðxþ hbÞh
: ð15Þ
Using this relationship one can check the analytical sensitivity cal-culation by comparing it with a finite difference approximation. To
perform this task, we use a central difference formula, which pro-vides second-order accuracy. The resulting directional derivativeapproximation is shown below.
@f ðxÞ@x� b � f ðxþ hbÞ � f ðx� hbÞ
2h: ð16Þ
Reducing the step size, h, improves accuracy, however if h is toosmall, subtractive cancelation error reduces the accuracy of theapproximation. The maximum achievable accuracy is also limitedby the tolerance to which the Newton–Krylov method is convergedin the evaluation of f ðxþ hbÞ and f ðx� hbÞ. Furthermore, the accu-racy of the adjoint sensitivity is limited by the tolerance used insolving for the adjoint vector. Results from a similar study pub-lished by Martins et al. [40] indicated that for finite differencederivative approximations, the highest accuracy is achieved inthe range where 10�5
6 h 6 10�7, with the error increasing expo-nentially the further one ventured outside this range. Whenh < 10�16, the method broke down because f ðx� hbÞ � f ðxÞ ¼ 0based on machine percision. In the present study, the results indi-cates that for the central difference approximations, the greatestaccuracy In the results presented, both the adjoint and residualvectors are solved to a tolerance of e ¼ 10�7. Under these condi-tions, the best agreement between the sensitivity analysis methodswas achieved with a step size of h ¼ 10�7. Table 1 shows the ad-joint and central difference sensitivity results for a sample aero-structural analysis that included 19,159 density variables, q; 8twist variables, aj; one angle of attack variable, a0; and a SIMPpenalization variable, p, for a total of n ¼ 19;169 variables. The re-sults verify the adjoint sensitivity analysis as there is strong agree-ment with the finite-difference method for all three test functions.
4.6. Computation time and parallel scalability
In addition to ensuring a high degree of accuracy, the adjointmethod yields a major advantage in computation time. Once theaerodynamic and structural state vectors have been obtained, alln sensitivities for a given function can be calculated with justone solution of the adjoint equation. Therefore, the total time re-quired to solve all adjoint sensitivities is on par with the time re-quired to solve the aerostructural system. This is in starkcontrast to finite-difference methods, which require OðnÞ full aero-structural solutions for each function being differentiated.
The Krylov subspace method used in the solution of Newton up-date (Eq. (10)) and the adjoint equation (Eq. (12)) is carried out inparallel on a distributed memory cluster comprised of 2.53 GHz,quad-core Intel Xeon 5500x86-64 processors. For both problems,each processor is assigned a portion of the linear system corre-sponding to an assigned block within the mesh, and the GMRESoperations are performed in parallel in order to maximize compu-tational efficiency. During these operations, the portions of thesolution that are shared by multiple processors, are communicatedusing the message passing interface (MPI) protocol. After the solu-tion is computed, elements of the vector that are shared betweenprocessors (these portions correspond to nodes located along theblock interfaces) must be transfered. However, the solution isnever stored in a single location, but is distributed across allprocessors.

3 6 12 24 48 120
4
8
16
32
64
128
256
512
Total number of processors
Wal
l tim
e [s
]
Newton−Krylov solutionAdjoint set upAdjoint solution
Fig. 6. Parallel speed-up performance of the Newton–Krylov and adjoint solutionprocedures.
K.A. James et al. / Computers and Structures 134 (2014) 1–17 7
For both the Newton–Krylov solution and the adjoint solution,the structural analysis portions of the coupled system are allottedtwice the number of processors used for the aerodynamic portion.Fig. 6 shows plots of the wall time required to perform the New-ton–Krylov and the adjoint method as a function of the total num-ber processors used.
The plots show the convergence time for each procedure using3, 6, 12, 24, 48, and 120 total processors. In each case, the proces-sors devoted to the structural analysis account for two thirds of thetotal number of processors, while the aerodynamic processors ac-count for the remaining one third. The most costly operation isthe Newton–Krylov procedure, which requires the solution of mul-tiple linear systems until the Newton algorithm converges. The ad-joint set up procedure involves the computation of the Jacobian ofthe global residual, which is given by @R=@y. The plot indicates thatthe cost of this operation scales nearly linearly with the number ofprocessors because, once the state variable has been obtained, theevaluations of the partial derivatives in the Jacobian matrix areindependent of one another. By contrast, the parallel scaling ofthe two linear system solution procedures is slightly less efficient,since significant quantities of data must be passed between theprocessors during these operations. For both the Newton–Krylovsolution and the adjoint solution, the results indicate strong paral-lel speed-up up to 48 total processors. The plot also shows that if
105 106101
102
103
Number of design variables
Con
verg
ence
tim
e [s
]
Fig. 7. The computational cost of a single aerostructural analysis plotted in terms of comeasured in structural degrees of freedom.
the number of processors is too high, the cost of passing data be-tween processors outweighs the benefits of parallelization, whichis why the 120-processor case is much slower than the 48-proces-sor case. The precise number of processors at which this switch oc-curs is dependent upon the size of the meshes used in the physicalmodel (i.e., the finite element mesh and the panel mesh) as well asthe structure of the matrix that defines the linear system. In theaerostructural results presented in Section 7, all aerostructuraland adjoint sensitivity analysis is performed using 48 processors.
In addition to the number of processors, the convergence timeand overall viability of the algorithm are also highly dependenton the size of the design space. For topology optimization problemsin general, the size of the design space is proportional to the num-ber of degrees of freedom in the structural finite element mesh. Inthe case of a three-dimensional problem with node-based designvariables, the size of the structural analysis problem (i.e. the totalnumber of structural degrees of freedom) is exactly three timesthe number of design variables. Although it is desirable to have avery large number of design variables in order to obtain a detailedrepresentation of the optimal design, one is limited by the in-creased computational cost associated with increasing the size ofthe design space. In order to determine an approximate upperbound on the size of design problem that we can solve with fixedcomputational resources, we examine the computation time andmemory requirements of the aerostructural solution method withincreasing problem size. We focus, in particular, on the memoryrequirements of the direct factorization of the structural stiffnessmatrix. which forms the largest block in the Jacobian of the aero-structural residual equation.
Fig. 7 shows how the computation time and memory requiredto solve the coupled aerostructural problem vary with respect tothe size of the design space. Specifically, Fig. 7(b) plots the memoryrequired to store the factorized stiffness matrix, which accounts forthe majority of memory usage during the analysis. Because thestructural analysis is significantly more computationally intensivethan the aerodynamic analysis, in all simulations 48 processorswere allocated to the structural portion of the problem, and 16 pro-cessors were allocated to the aerodynamic portion. The analysiswas run on a parallel cluster containing 8 nodes with 8 processorsper node. Each node had 16 GB of memory, for a total of 96 GB allo-cated to the structural problem. Fig. 7(a) shows a consistent expo-nential increase in the time required for the analysis to converge.Fig. 7(b) shows a similar increase in the memory usage as the num-ber of design variables is increased. In the final case, the number ofdesign variables is approximately 7:15� 105, and the requiredmemory is approximately 67 GB. Extrapolating from the plot
105 106101
102
Number of design variables
Mem
ory
usag
e [G
B]
nvergence time (a) and memory usage (b) versus the size of the analysis problem

8
10
12
baseline jig twistbaseline deflected twistoptimized jig twistoptimized deflected twist
8 K.A. James et al. / Computers and Structures 134 (2014) 1–17
reveals that the memory limit of 96 GB is reached at a problem sizeof roughly 106 design variables. However, one is likely to run out ofmemory earlier than this, since additional memory is required forthe operating system and for storing smaller auxiliary data used bythe algorithm. Therefore, given the computational resources avail-able, the maximum number of design variables is in the range of8� 105 to 9� 105 variables.
0 5 10 15 20 25 30−2
0
2
4
6
z[m]
α [°]
Fig. 9. Twist distribution for the aerodynamically optimized CRM wing.
5. Aerodynamic tailoring through twist optimization
Aerodynamic optimization provides a useful test case withwhich to validate the aerostructural analysis solver and also theexamine the impact of aeroelasticity on the design optimizationproblem. It is a well-known result from classical aerodynamics thatfor a fixed lift value, the induced drag on a wing is minimized whenthe lift distribution varies elliptically along the span. In this sectionwe seek to reproduce an elliptical lift distribution by varying onlythe spanwise twist variables. Since the internal structure is fixed,the mass, and therefore the total lift, must remain unchanged. Also,the planform and airfoil shape are held constant throughout theprocedure. Using the fully coupled aerostructural analysis de-scribed above, we optimize the jig twist in order to obtain a wingwhose deflected shape under aerodynamic loading produces anelliptical lift distribution. In other words, through optimization,we are tailoring the aeroelastic response of the wing to achievethe prescribed lift distribution. This process is similar to aeroelastictailoring, in which the structural design is optimized to preventundesirable aeroelastic behavior such as flutter and divergence.Here, we optimize the aerodynamic shape so that the resultingaeroelastic deflection yields optimal aerodynamic performance.Therefore, for the purposes of this study, we refer to this processas aerodynamic tailoring.
The optimization problem and aerostructural analysis are car-ried out at a cruise Mach number of 0.74. The structural box hasuniform intermediate density q ¼ 0:35 and no SIMP penalization.The cruise constraint is enforced so that L ¼Wbaseline ¼ 1964 kN,where L is the total lift acting on the wing and W is the weightof the aircraft divided by two, since each wing is responsible forsupporting half the weight of the plane. The objective function isdrag, D, which is minimized only with respect to the jig twist an-gles, and the aircraft angle of attack, a0. The resulting optimizationproblem can be expressed mathematically as follows.
minaj
D;
subject to : L ¼Wbaseline;
� 6 6 aji � 6; i ¼ 1; . . . 8;Ku� FðwÞ ¼ 0:
ð17Þ
Fig. 8 shows the rigid and flying configurations of the outermold lines for the baseline CRM wing. The figure demonstratesthe effect that deflection and bend-twist coupling have of the local
X
Y
ZFlying configuration
Rigid configuration
(a) Spanwise view
Fig. 8. The baseline CRM win
angle of attack, especially at the tip of the wing. The correspondingtwist distribution along with the twist distribution for the opti-mized wing, is shown in Fig. 9.
Fig. 10 shows the lift distributions corresponding to the fourtwist distributions shown in Fig. 9. Note that the lift distributionsobtained through pure aerodynamic analysis do not take into ac-count the structural deflection of the wing. In this sense, they de-scribe the hypothetical lift distribution of the wing if it werefully rigid. The results validate the aerostructural analysis frame-work, as the optimization procedure was able to generate a wingwith an elliptical lift distribution. The results further illustratethe importance of including aerostructural coupling in the analysis.As shown in Figs. 8 and 9, the upward bending of the wing due toaerodynamic loads causes a leading-edge-down torsional deflec-tion that increases in magnitude toward the tip of the wing. Thisreduces the lift near the tip of the wing, and pushes the load root-ward. The optimization procedure compensates for this effect byincreasing the local jig twist angle in the outer section of the wing.Therefore, the optimized wing exhibits an optimal lift distributiononly under the prescribed loading condition, and when the load isabsent, the undeflected wing has a suboptimal shape, as shown inTable 2.
Figure 10 shows plots of the spanwise lift distribution for eachof the four wing configurations, shown in Table 2. As predicted byaerodynamic theory, the wing configurations whose lift distribu-tions are closest to the elliptical plot, have the lowest dragcoefficients.
These results demonstrate the importance of including aero-structural coupling in any wing optimization procedure as theaerodynamic performance is highly dependent on the structuralresponse and vice versa. The results also suggest that any attempt
X
Y
Z
(b) Chordwise view
g under cruise loading.

0 5 10 15 20 25 300
10
20
30
40
50
60
70
80
90
100
110
z [m]
Lift
[kN
/m]
baseline wing; aerodynamic analysisbaseline wing; aeroelastic analysisoptimized wing; aerodynamic analysisoptimized wing; aeroelastic analysiselliptical distribution
Fig. 10. Lift distribution for the aerodynamically optimized CRM wing.
Table 2Drag coefficient results ðCDÞ for the baseline and twist-optimized wing (The quantitiesin parentheses represents the percentage of improvement over the baseline wing).
Aerodynamic analysis(rigid structure)
Aeroelastic analysis(flexible structure)
Baseline wing 0:014868 ð�4:9%Þ 0:015642 ð0:0%ÞOptimized wing 0:014412 ð�7:9%Þ 0:014303 ð�8:5%Þ
K.A. James et al. / Computers and Structures 134 (2014) 1–17 9
to optimize the structural design of the wing will benefit signifi-cantly by including aerodynamic shape variables, as this aspectof the design has a major impact on the loads acting on the struc-ture. In the following section we add structural design variables tothe optimization problem in order to capitalize off the interplaybetween the aerodynamic and structural behavior of the wing,thus producing an aerostructurally optimal design.
6. Aerostructural optimization
The aerostructural optimization procedure presented herebuilds upon previous studies involving topology optimization ofstructures subject to aeroelastic coupling [11,12]. However, inthese earlier efforts only the structural design was subject to opti-mization, while the outer moldline of the wing was treated as afixed design feature. The current study combines this approachwith the aerodynamic optimization techniques discussed in theprevious section to achieve a concurrent MDO framework in whichthe aerodynamic shape and structural design are optimized con-currently. The concurrent MDO framework is the primary contri-bution of this study, however, we have also implemented analternative, sequential procedure for solving the same aerostruc-tural optimization problem. The sequential procedure solves forthe optimal aerodynamic shape and structural design separatelyand in sequence. In this way, it is analogous to the approach usedin previous aerostructural topology optimization studies, andtherefore it is used as a comparison case to quantify the incremen-tal benefits of the concurrent MDO approach that we haveproposed.
6.1. Problem formulation
For both the aerodynamic and aerostructural optimizationproblems, we minimize the lift-induced drag on the wing. This
choice of objective function provides a measure of the aerody-namic efficiency as well as the structural efficiency of the wing,since the induced drag is proportional to the mass of the structure.Furthermore, this quantity has practical significance since the dragforce is directly proportional to the rate of fuel consumption for theaircraft. Therefore, for the aerostructural optimization problem, weminimize drag with respect to the jig twist angles, aj, as well as aset of structural design variables, xs, which get passed through adensity filter to obtain the nodal material densities, q used in theSIMP formulation.
The drag is minimized for a cruise flight condition in whichL ¼W . In order to ensure that the structure maintains some requi-site stiffness, we enforce a constraint on the compliance such thatC < Cmax. As in previous aerostructural optimization studies [8,28],the critical load used to define the structural constraint is takenfrom a separate load case corresponding to a maneuver flight con-dition. Here we have chosen as load factor of 2, so that the compli-ance constraint is enforced only during the 2 g maneuver conditionduring which L ¼ 2W . The two flight conditions, cruise and maneu-ver, are independent of one another and are solved simultaneouslyin parallel. In order to satisfy the two lift constraints, the angles ofattack for the two flight conditions are included as design variablesand are denoted by the vector a0, which for this problem has alength of two (one angle for each flight condition). The final designvariable, p, is the SIMP penalization factor, which is allowed to varyin accordance with the optimizer-based continuation method asdiscussed earlier. The resulting optimization problem can be writ-ten as follows:
minxs ;aj ;a0 ;p
D;
subject to : Lcruise ¼W;
Lmaneuver ¼ 2W;
Cmaneuver < Cmax;
ðp� p�Þr ¼ 0;0 < qmin 6 xs 6 1:
ð18Þ
The weight of the aircraft, W is equal to the structural weight of thewing, Wwing, plus some fixed weight, W fixed, used to account for thefuselage and all other parts of the plane that are not subject to opti-mization. In the results presented below, the fixed weight has beenchosen as W fixed ¼ 7� 105 N. This choice is roughly based on theBoeing 777–300 aircraft, whose wing size and geometry are similarto that of the CRM. The maximum allowable compliance was set toCmax ¼ 20 kN. When aerostructural analysis is performed on thebaseline wing structure with no stiffness penalization, this compli-ance corresponds to a vertical tip deflection of approximately 2 m,which is equal to 6.7% of wingspan. As has been done in previousstudies involving topology optimization of wings [1,2], the compli-ance constraint serves as a convenient substitute for stress-basedmaterial failure constraints, which are difficult to enforce in topol-ogy optimization problems due to the numerical instabilities theyintroduce, the most notable of which is the stress singularity prob-lem [41]. The enforcement of compliance during the topology opti-mization process yields a structurally efficient conceptual design,which can be refined through subsequent sizing and shape optimi-zation, during which time material failure constraints can be en-forced more effectively.
Fig. 11 shows a flow chart detailing the flow of information andthe distribution of tasks between the various computational mod-ules. As shown in the flow chart, the optimizer passes the currentvalue of the design variables to the analysis modules. Note that theSIMP module applies the density filter and SIMP penalization to thestructural design variables, xs, and the resulting penalized densi-ties, qp
i
� �, get passed to the aerostructural solver. The aerostructur-
al analysis is performed for the current design and flight

Fig. 11. MDO architecture for the aerostructural optimization problem.
10 K.A. James et al. / Computers and Structures 134 (2014) 1–17
conditions, as defined by the parameters q; p;a, and returns thecorresponding values of the objective and constraint functions,along with their sensitivities, only after the aerostructural systemhas been solved to full convergences. These values then get passedto the optimizer, which use that information to update the designvariables based on the optimiality criteria. This cycle is repeateduntil the process converges to an optimal solution.
In order to simulate the effect of having a minimum skin thick-ness at the top and bottom surfaces of the wingbox, the materialdensities of the elements along these faces is constrained to remainabove qmin ¼ 0:15 (compared to qmin ¼ 10�3 for interior elements).Additionally, the penalization applied to these elements is half that
Fig. 12. Algorithm architecture for the
of the interior elements. Therefore, the minimum penalized den-sity for the top and bottom skin elements is 0.058. This constraintis equivalent to a requirement that the thickness of the wing skinmust be equal to or greater than 15% of the thickness of the surfaceelements. This interpretation is consistent with the ersatz materialapproach to topology optimization, where elements that are bi-sected by the solid-void interface are treated as having densityequal to the fraction of the element that lies within the materialdomain [42]. In this way we avoid having to model the skin usingultra thin elements (i.e. having a length-to-thickness ratio greaterthan 5), which may exhibit degenerate displacement modes in re-sponse to loading.
This enforcement of a minimum skin thickness ensures that thestiffness at the structural nodes to which the external forces areapplied, remains above a minimum threshold. This guarantees thata sufficient amount of material is always present to support thesurface load and transfer that load to the primary structure, which,in turn, transfer that load to the supports. In the context of the sta-tic aerostructural analysis problem, the primary structure isrepresented by the spars, and the supports are analogous thewing-fuselage interface, along whose surface the displacementsare assumed to be fixed. By enforcing a minimum thickness atalong the outer surface in this way, we prevent large deformations,which can cause the aerostructural analysis to diverge.
6.2. Sequential optimization
As a comparison case, the aerostructural problem (18) is alsosolved using a sequential optimization procedure. This procedureis carried out in two stages. The first stage of the algorithm is apure aerodynamic optimization, during which drag is minimizedwith respect to the jig twist only, while the material density is heldconstant and uniform at q ¼ q0. Because the structure is not al-lowed to change during this process, only the cruise constraintL ¼W is enforced. Once a minimum is achieved, the resulting opti-mized jig twist distribution is used in a second optimization wherethe aerodynamic shape is fixed and the nodal densities are allowedto vary, subject to a compliance constraint, which is enforced forthe 2g maneuver condition. Aerostructural coupling is includedin all analysis during both stages. Fig. 12 shows the data flow forthe sequential algorithm. As shown in Fig. 12, the optimized jigtwist distribution, a�j , generated by the aerodynamic optimization,is passed directly to the aerostructural optimizer at the beginningof the topology optimization. After this point, the jig twist is trea-ted as a fixed design feature, and is not subject to optimization.
sequential optimization procedure.

Table 3Comparison of the various types of optimization procedures used in this study.
Aerodynamic tailoring Sequential aerostructural optimization Concurrent aerostructuraloptimization (MDO)
Analysis . Coupled aeroelstic . Coupled aeroelstic . Coupled aeroelsticAnalysis Analysis Analysis
Design . Jig twist ðajÞ . Jig twist ðajÞ . Jig twist ðajÞVariables . Structural topology ðqÞ . Structural topology ðqÞArchitecture Single-discipline: . only aerodynamic
shape is optimizedSequential: . pure aerodynamic shapeoptimization, followed by pure structural topology optimization
Monolithic: . all aspect of designoptimized concurrently
Goal/expected result . Aerodynamic optimum(maximum L=D)
. Improved aerostructural performance(not & performance optimal)
. Optimal aerostructural
K.A. James et al. / Computers and Structures 134 (2014) 1–17 11
This algorithm is implemented using two approaches. In thefirst approach, which will be referred to as algorithm A, the shapeoptimization phase is identical to the procedure implemented inSection 5, in that the structural compliance is ignored. In algorithmB, the compliance constraint is enforced during both the shapeoptimization and the structural optimization. Therefore, duringthe first stage of the algorithm the optimizer must tailor the twistdistribution, without varying the topology, to ensure the resultingaerodynamic loads do not cause a violation of the compliance con-straint. Table 3 summarizes the three different types of optimiza-tion procedure presented in this paper, and provides a side-by-side comparison of the difference feature of each one.
7. Results and discussion
Numerical results for the MDO and sequential algorithms areshown in Table 4. The numbers reveal that the design obtainedusing the MDO algorithm achieved 42% less drag than the designproduced by the standard sequential algorithm. When structuralconsiderations are included in the shape optimization phase ofthe sequential algorithm, as is the case for algorithm B, this
Table 4Comparison of the optimized sequential and MDO results for the aerostructural topology
CD Weight (kN)
Sequential optimization A 0.00588 572Sequential optimization B 0.00414 312MDO 0.00340 253
0 7.5 15 22.5 300
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
l/L [m
−1]
z/L
Sequential ASequential BMDOElliptical
0 0.25 0.5 0.75 1.0
(a) maneuver condition
l/L [m
−1]
Fig. 13. Normalized lift distributions for t
improves the result significantly. However, the resulting designstill experiences 21% more drag than the MDO design. The opti-mized structural weight (shown in the second column of Table 4),offers some insight into the cause of the relatively poor perfor-mance of the sequential algorithm. The table shows that theMDO design is much lighter than both sequential results. Further-more, a head-to-head comparison of each result reveals that inevery instance, the lighter wing experiences less drag. (Note thatthe weight values listed in the table refer only to the weight ofthe wingbox. The total weight of the plane is the sum of this valueplus the fixed weight, which accounts for the weight of the fuse-lage and other sections of the plane not subject to optimization.)
Fig. 13 shows the spanwise lift distributions for each designunder the two flight conditions. These plots offer a physical expla-nation for the superior aerostructural performance of the MDO-optimized design. The y-axis represents the normalized lift, l=L,which is defined as the local lift value, l (measured in N/m), dividedby the total lift force, L, acting on the wing. Therefore
lL¼ cl � c
CL � S; ð19Þ
optimization problem.
CL Oswald efficiency Wall time (hh:mm)
0.404 0.984 9:330.322 0.884 10:240.303 0.955 13:12
0 7.5 15 22.5 300
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
0.05
z/L
Sequential ASequential BMDOElliptical
0 0.25 0.5 0.75 1.0
(b) cruise condition
he aerostructurally optimized wings.

12 K.A. James et al. / Computers and Structures 134 (2014) 1–17
where cl is the local lift coefficient of the airfoil, c is the local chordlength, CL is the lift coefficient of the entire wing, and S is the plan-form area. Using this formulation, the area under all plots is equal to1.
Both the maneuver and cruise lift distributions for the ‘‘sequen-tial A’’ result are fairly close to the elliptical lift distribution, whichis known to be aerodynamically optimal. This indicates that thestructural optimization phase of the algorithm has very little effecton the eventual lift distribution, which, in this case, is optimized al-most exclusively for aerodynamic performance. By contrast, theMDO algorithm pushes the overall load distribution in the root-ward direction so that the load is smaller near the tip of the wing.As a result, the MDO lift distribution deviates significantly from theelliptical lift distribution, which reduces aerodynamic efficiency.However, the reduced load at wing tip leads to a lower bendingmoment throughout the wing, which means that less material isrequired to satisfy the structural constraint. As shown in Table 4,this reduced weight leads to lower induced drag. By enforcing acompliance constraint during the aerodynamic phase of thesequential procedure, algorithm B is also able to achieve a similaraerodynamic trade-off, as the load in the outer portion of the wingis lower than the elliptical load. However, in the absence of a con-current MDO approach, the sequential B algorithm fails to achievethe optimal trade-off.
It must be noted that these lift distributions represent mathe-matical optima for the specific problem as defined in(18). In prac-tice, when designing for optimal lift distribution, one must alsotake into account the fact that the control surfaces on the wingneed to remain functional during each maneuver. Therefore, itmay not be practical to achieve the lift distribution suggested bythe optimization. To address this issue one could include local liftconstraints along the span that reflect the limits imposed by thecontrol surfaces.
The convergence history for the MDO algorithm (shown inFig. 14) provides further evidence that the low in drag value isdue to the algorithm’s ability to reduce the structural mass. Thefigure contains convergence plots for both the mass and drag val-ues. This illustrates how closely the aerodynamic drag is tied tothe structural mass, as the plots for the two quantities follow verysimilar paths.
In addition to the reduction in mass, there is a second factorthat also has a significant impact on the drag performance of theoptimized designs. As demonstrated in the aerodynamic optimiza-tion examples presented in Section 5, the shape of the deflected
0 20 40 60 80 100 120 140 160 180 200
0.004
0.008
0.012
0.016
0.02
Iteration Number
Dra
g C
oeffi
cien
t
0 20 40 60 80 100 120 140 160 180 200
2
4
6
8
10
x 104
Mas
s [k
g]
Fig. 14. Convergence history of the drag and mass functions for the MDO case.
wing determines its aerodynamic efficiency for a given lift value.Because the examples presented involve fixed airfoil and planformshapes, the aerodynamic efficiency of the wing in this case is deter-mined entirely by the spanwise lift distribution. In order to quan-tify and compare the aerodynamic efficiency of the optimizedwings, we use the Oswald efficiency factor, which is a measure ofhow much induced drag a wing produces for a given amount of liftand a given span [43]. For a wing with an aspect ratio AR, the in-duced drag co-efficient, CDi
, can be expressed in terms of the liftcoefficient, CL, the aspect ratio, AR, and the span efficiency, e, asfollows.
CDi¼ C2
L
peAR: ð20Þ
The span efficiency is maximized when the spanwise lift distri-bution is elliptical. As shown in Table 4, the sequential A design hasthe highest span efficiency. This is expected since the sequential Aalgorithm generates the jig shape of the wing using a pure aerody-namic optimization, which, as was shown in Section 5, produces anelliptical lift distribution. The sequential B design has a signifi-cantly lower span efficiency since its jig shape is designed toachieve lower drag through a reduction on structural weight. TheMDO algorithm is similar to the sequential B algorithm in that itmodifies the jig shape in order to achieve a lighter structure as wellas strong aerodynamic efficiency. However, as shown in Table 4,the design generated by the MDO algorithm has a significantlyhigher span efficiency than the sequential B design. The reasonfor this superior aerodynamic efficiency can be deduced from thelift distribution plots shown in Fig. 13. Given the definition of theoptimization problem (18), the ideal design should, in theory,experience a root-heavy lift distribution during the maneuver con-dition, while maintaining an elliptical lift distribution duringcruise.
However, achieving this separation between the two load distri-butions is difficult because the jig shape remains fixed as the planetransitions from one condition to the other. Consequently, bothsequential algorithms show very little separation between theircruise and maneuver lift distributions. Only the MDO algorithmwas able to generate any useful separation between the two liftdistributions. During the maneuver condition, the MDO designand the sequential B design have very similar lift distributions.However, during the cruise condition, the lift distribution of theMDO design is much closer to the elliptical distribution than thatof the sequential B design. This suggests that there is an additional
0 50 100 150 20050
100
150
200
250
Iteration Number
Com
plia
nce
[kJ]
0
1
2
3
4Pe
naliz
atio
n fa
ctor
Fig. 15. Convergence history of the compliance function and the SIMP penalizationfactor for the MDO case.

K.A. James et al. / Computers and Structures 134 (2014) 1–17 13
advantage to the MDO approach. In this example, the MDO algo-rithm yields an aerodynamic tailoring effect. Although the jigshape under both loading conditions is the same, the algorithm tai-lors the structural deflection to suit the objective being consideredin each case. Under maneuver loading, the deflection is tailored toreduce structural compliance, whereas, during the cruise condi-tion, the deflection is tailored to increase aerodynamic efficiency.
Table 4 also contains a comparison of the computation times re-quired for each algorithm. In all three cases, the algorithms wererun on 96 processors (48 for each load case). All three algorithmshad similar convergence times. However, the MDO algorithm con-verged slightly more slowly than the sequential algorithms due tothe increased dimensionality of the problem, and the added com-putational cost of having to compute sensitivities with respect toa larger number of design variables.
Fig. 15 shows the convergence histories for the compliance andthe SIMP penalization factor for the MDO algorithm. The graphprovides some insight into the relationship between the two quan-tities, and illustrates the effectiveness of the optimizer-based
(a) Block contour plot with finite element me
(b) Slice contour plot
Fig. 16. Material distribution ðqp� Þ for the CRM w
continuation method. During the early stages of the optimizationprocess, the penalization factor increases smoothly, while the com-pliance remains constant at its upper bound. This shows that, usingthis approach, one can achieve a steady, monotonic increase in thepenalization factor while maintaining stability in the objective andconstraint functions.
Figs. 16–18 show the optimized material distribution inside thewingbox for each of the three algorithms. Each figure containsthree contour plots of the material density, q, penalized usingthe target penalization value p�. From Eq. (1), this quantity is di-rectly proportional to the local effective Young’s modulus, andtherefore these plots provide a graphic representation of the rela-tive stiffness throughout the domain. In Figs. 16(c), 17(c) and18(c), the coloring of the contour plot is mapped to a logarithmicscale. These plots reveal areas in the structure where the relativematerial density is non-void (i.e., q > 0:001), but is low enough(i.e., q < 0:1) that it is not visible when plotted on the linear scale.These regions are significant since material densities in this rangeare sufficient to transfer loads between structural components, and
sh
(c) Logarithmic contour plot
ing optimized using sequential algorithm A.

(a) Block contour plot with finite element mesh
(b) Slice contour plot (c) Logarithmic contour plot
Fig. 17. Material distribution ðqp� Þ for the CRM wing optimized using sequential algorithm B.
14 K.A. James et al. / Computers and Structures 134 (2014) 1–17
are crucial to the overall viability of the structure. In the plotsshown, the density in this surface region ranges from qp � 0:05to qp � 0:1. Although the density data in this region may providesome insight into how to select the thicknesses of the skin panelsat various sections along the surface, the actual design of the wingskin requires a separate procedure that can take into account buck-ling and manufacturing constraints.
For all three algorithms, the optimized structures are domi-nated by a single spar that extends from the root toward the tipof the wing. In all three cases, the spar starts out in the trailing halfof the chord at the root of the wing, and then extends toward theleading edge as it moves outward along the span. Therefore, theeffective sweep angle of the spar is smaller than that of the overallwingbox. This reduces bend-twist coupling and results in lowercompliance values.
The contour slice plots reveal that in both the MDO result andthe sequential B result, the optimizer has hollowed out the interiorof the wing, which is fully void. The low-density material
distributed along the faces at the leading edge and trailing edgeof the wingbox serves as a shear web, transferring load betweenthe top and bottom skin. Figs. 19–21 contain spanwise contourslice plots of the optimized topology for each method, with therear-most slice at the top.
These structures deviate significantly from the traditional rib-spar configuration typically used in the design of wings. However,the topologies obtained are consistent with previous efforts tooptimize structures subject to distributed loads [44]. It is commonthat structures optimized for distributed loads contain some inter-mediate density material that acts as a secondary structure trans-ferring the applied load to a primary structure, which is connectedto the supports [44]. This phenomenon is related to the mesh-dependency issue discussed in [24]. In this case the problem iscaused by the non-uniqueness of the solution. This problem oftenarises in cases where the structure is subject to distributed, uni-ax-ial loads, which permit an infinite number of equally desirablesolutions [24]. In this situation, the optimizer selects for

(a) Block contour plot with finite element mesh
(b) Slice contour plot (c) Logarithmic contour plot
Fig. 18. Material distribution ðqp� Þ for the CRM wing optimized using MDO.
Fig. 19. Spanwise slices of the optimized topology ðqp� Þ for the sequential A method.
K.A. James et al. / Computers and Structures 134 (2014) 1–17 15

Fig. 20. Spanwise slices of the optimized topology ðqp� Þ for the sequential B method.
Fig. 21. Spanwise slices of the optimized topology ðqp� Þ for the MDO method.
16 K.A. James et al. / Computers and Structures 134 (2014) 1–17
intermediate density regions, which are analogous to having aninfinitely fine discretization. This problem cannot be preventedby using a finer mesh, but one possible strategy would be to havethe designer select a discrete design based on manufacturingconsiderations.
The optimized designs could also benefit from the inclusion ofbuckling constraints. Given the absence of any rib-like structures,the designs presented would likely experience buckling, particu-larly in the wing skin. Although the omission of buckling and othermanufacturing constraints during the topology design phase isconsistent with recent practice, both in industry and acade-mia[1–4,11], including such constraints during the topologyoptimization could lead to more robust and more readily manufac-turable topologies. In its current form, the algorithm is intended tobe part of a larger design process that would include subsequentoptimizations designed to prevent bucking and addressmanufacturability.
8. Conclusions
We have presented a concurrent multidisciplinary frameworkfor performing concurrent aerostructural shape and topology opti-mization of aircraft wings. The algorithm improves upon previousefforts at aerostructural topology optimization by including aero-dynamic shape variables, which are optimized together with thestructural topology in a fully coupled multidisciplinary framework.
In order to perform this task, we have developed and implementedan aerostructural analysis code that efficiently solves the coupledaerostructural residual equation in parallel using a preconditionedNewton–Krylov method. Additionally, we accurately compute thegradients using a coupled adjoint method.
Designs obtained using the concurrent multidisciplinary algo-rithm were compared with designs obtained via two sequentialoptimization procedures. The sequential algorithm were analogousto the general approach followed in previous aerostructural topol-ogy optimization studies in which the jig shape of the outer mold-line remained fixed throughout the topology optimization process.Results showed that the concurrent multidisciplinary algorithmprovided significant advantages over the sequential approach. Inthe cases studied, the MDO wing achieved an 18% lower drag valuethan the best sequentially-optimized design. This performance dis-parity was attributed primarily to the lower mass of the MDO de-sign, since the MDO algorithm was able to optimize the trade-offbetween the need for a lighter structure and the desire for an aero-dynamically efficient load distribution.
In this regard, the results showed that the standard sequentialalgorithm could be improved upon significantly by including astructural compliance constraint during the aerodynamic optimi-zation of the jig shape. This resulted in a greater portion of thespanwise loading being distributed toward the root of the wing,which improved the structural performance of the design whiledecreasing the aerodynamic span efficiency. However, comparingthis improved sequential design with that obtained using MDO re-

K.A. James et al. / Computers and Structures 134 (2014) 1–17 17
vealed an additional advantage of the MDO algorithm. Through theconcurrent MDO approach, we observed an aerodynamic tailoringeffect in which the deflected shape of the wing was tailored toachieve the desired lift distribution for a given load condition. Thiseffect was evidenced by the fact that, during the cruise condition,which provided the drag value used for the objective function,the MDO design was closer to the elliptical distribution, whichmaximizes aerodynamic efficiency. Similarly, during the maneuvercondition, which provided the compliance value used in the struc-tural failure constraint, the lift distribution contained smaller loadsnear the wing tips, which reduces the demand placed on the struc-ture, thereby allowing for a lighter wing. No similar effect wasachieved by either of the sequential algorithms as the lift distribu-tion remained relatively unchanged through the transition fromcruise to maneuver.
Acknowledgments
This research was supported by the Ontario Graduate Scholar-ship program and the National Sciences and Engineering ResearchCouncil of Canada.
References
[1] Grihon S, Krog L, Tucker A, Hertel K. A380 weight savings using numericalstructural optimization. In: 20th AAAF colloquium on material for aerospaceapplications, Paris, France; 2004. p. 763–66.
[2] Krog L,Tucker A. Topology optimization of aircraft wing box ribs. In: 10th AIAA/ISSMO multidisciplinary analysis and optimization conference, Albany, NewYork; 2004 [AIAA 2004-4481].
[3] Buchanan S. Development of a wingbox rib for a passenger jet aircraft usingdesign optimization and constrained to traditional design and manufacturerequirements; 2007.
[4] Wang Q, Lu Z, Zhou C. New topology optimization method for leading-edgeribs. J Aircraft 2011;48(5):1741–8.
[5] Venkataraman S, Haftka RT. Structural optimization complexity: what hasmoore’s law done for us? Struct Multi Optim 2004;28:375–87.
[6] Walsh JL, Weston RP, Samareh JA, Mason BH, Green LL, Bierdon RT.Multidisciplinary high-fidelity analysis and optimization of aerospacevehicles. In: Proceedings of the 38th aerospace sciences meeting and exhibit,Reno, Nevada; 2000.
[7] Newman III JC, Taylor III AC, Barnwell RW, Newman PA, Hou GJ-W. Overviewof sensitivity analysis and shape optimization for complex aerodynamicconfigurations. J Aircr 1999;36(1):87–96.
[8] Martins JRRA, Alonso JJ, Reuther JJ. High-fidelity aerostructural designoptimization of a supersonic business jet. AIAA J Aircr 2004;41(3):523–30.
[9] Chittick IR, Martins JRRA. An asymmetric suboptimization approach toaerostructural optimization. Optim Eng 2009;10:133–52.
[10] Maute K, Allen M. Conceptual design of aeroelastic structures by topologyoptimization. Struct Multi Optim 2004;27:27–42.
[11] Maute K, Reich G. An integrated multi-disciplinary topology optimizationapproach for adaptive wing design. AIAA J Aircr 2006;43(1):253–63.
[12] Stanford B, Ifju P. Aeroelastic topology optimization of membrane structuresfor micro air vehicles. Struct Multi Optim 2009;38:301–16.
[13] Bayandor J, Scott ML, Thompson RS. Parametric optimization of compositeshell structures for an aircraft Krueger flap. Compos Struct 2002;8:415–23.
[14] Cramer EJ, Dennis JE, Frank PD, Lewis RM, Shubin GR. Problem formulation formultidisciplinary optimization. SIAM J Optim 1993;4:754–76.
[15] Gill PE, Murray W, Saunders MA. Snopt: an SQP algorithm for large-scaleconstrained optimization. SIAM Rev 2005;47(1):99–131.
[16] Tedford NP, Martins JRRA. Benchmarking multidisciplinary designoptimization algorithms. Optim Eng 2010;11(1):159–83.
[17] Martins JRRA, Lambe AB. Multidisciplinary design optimization: a survey ofarchitectures. AIAA J 2013;51(9):2049–75. http://dx.doi.org/10.2514/1.J051895.
[18] Bendsøe MP, Kikuchi N. Generating optimal topologies in structural designusing a homogenization method. Comput Method Appl Mech Eng1988;71:197–224.
[19] Bendsøe MP. Optimal shape design as a material distribution problem. StructOptim 1989;1:193–202.
[20] Rozvany GIN, Zhou M. The COC algorithm. Part II: Topological geometrical andgeneralized shape optimization. Comput Methods Appl Mech Eng1991;89:309–36.
[21] Jog CS, Haber RB. Stability of finite element models for distributed parameteroptimization and topology design. Comput Methods Appl Mech Eng1996;130:203–26.
[22] Bruns TE, Tortorelli DA. Topology optimization of non-linear elastic structuresand compliant mechanisms. Comput Method Appl Mech Eng 2001;190(26-27):3443–59.
[23] Sigmund O. On the usefulness of non-gradient approaches in topologyoptimization. Struct Multi Optim 2011;43:589–96.
[24] Sigmund O. Numerical instabilities in topology optimization: a survey onprocedures dealing with checkerboards, mesh-dependencies and localminima. Struct Optim 1998;16:68–75.
[25] Guest JK, Asadpoure A, Ha SH. Eliminating beta-continuation from heavisideprojection and density filter algorithms. Struct Multi Optim 2011;44(4):443–53.
[26] Vassberg JC, DeHaan MA, Rivers SM, Wahls RA. Development of a commonresearch model for applied CFD validation studies. In: 26th AIAA appliedaerodynamics conference, no. AIAA-2008-6919, Honolulu, Hawaii; 2008.
[27] Sederberg TW, Parry SR. Free-form deformation of solid geometric models.Proc SIGGRAPH Comput Graph 1986;20:151–9.
[28] Kenway GKW, Kennedy GJ, Martins JRRA. A CAD-free approach to high-fidelityaerostructural optimization. In: 13th AIAA/ISSMO multidisciplinary analysisoptimization conference, Fort Worth, TX; 2010 [AIAA 2010-9231].
[29] Kennedy GJ, Martins JRRA. Parallel solution methods for aerostructuralanalysis and design optimization. In: 13th AIAA/ISSMO multidisciplinaryanalysis optimization conference, Fort Worth, TX; 2010 [AIAA 2010-9308].
[30] Kenway GKW, Kennedy GJ, Martins JRRA. A scalable parallel approach for high-fidelity steady-state aeroelastic analysis and derivative computations. AIAA J;2013 [in press].
[31] Yan B. A framework for aerostructural analysis of wind turbine blades[Master’s thesis] University of Toronto; 2011.
[32] Brown SA. Displacement extrapolation for CFD + CSM aeroelastic analysis. In:35th AIAA Aerospace sciences meeting, Reno, Nevada; 1997.
[33] Martins JRRA, Alonso JJ, Reuther JJ. A coupled-adjoint sensitivity analysismethod for high-fidelity aero-structural design. Optim Eng 2005;6:33–62.
[34] Kenway GKW, Martins JRRA. Multi-point high-fidelity aerostructuraloptimization of a transport aircraft configuration. J Aircr; 2013 [in press].
[35] Saad Y. A flexible inner-outer preconditioned GMRES algorithm. SIAM J SciComput 1993;14(2):461–9. http://dx.doi.org/10.1137/0914028.
[36] Saad Y, Schultz M. GMRES: a generalized minimal residual algorithm forsolving nonsymmetric linear systems. SIAM J Sci Stat Comput 1986;7:856–69.
[37] Saad Y. Iterative methods for sparse linear systems. 2nd ed. PWS Pub. Co.;2003.
[38] Saad Y, Sosonikina M. Distributed Schur complement techniques for generalsparse linear systems. SIAM J Sci Comput 1999;21(4):1337–56.
[39] Kaplan W. The directional derivative. In: Advanced calculus. Addison–Wesley;1991.
[40] Martins JRRA, Alonso JJ, Sturdza P. The complex-step derivativeapproximation. ACM Trans Math Softw 2003;29(3):245–62.
[41] Le C, Norato J, Bruns T, Ha C, Tortorelli D. Stress-based topology optimizationfor continua. Struct Multi Optim 2010;41:605–20.
[42] Allaire G, Jouve F, Toader A-M. Structural optimization using sensitivityanalysis and a level-set method. J Comput Phys 2004;194(1):363–93.
[43] Anderson JD. Fundamentals of aerodynamics. 2nd ed. McGraw-Hill Inc.; 1991.[44] Fuchs MB, Moses E. Optimal structural topologies with transmissible loads.
Struct Multi Optim 2000;19:263–73.