Embed Size (px)
Citation preview

Behavior Research Methods, Instruments, eft Computers1986, 18 (6), 601-607
Computer simulation of neural networksfor perceptual psychology
STEPHEN GROSSBERG and ENNIO MINGOLLACenter for Adaptive Systems, Boston University, Boston, Massachusetts
Computer simulations of neural network processes fill an important methodological niche, permitting the investigation of questions not resolvable by physiological, behavioral, or formal ap- .proaches alone. Two types of network simulations are considered: simulations of boundary completion and simulations of segmentation. Simulations that compare properties of published modelswith variations of these models are presented to illustrate how parametric computer simulationshave guided the development of neural models of visual perception.
The Role of Computer Simulationsin Theory Development
The dynamics of large ensembles of neuronsare as yetdifficult to observe directly. Even if direct observationwere possible, it would not explainhow the interactionsamong neurons generate the emergent properties that subserve intelligent behavior. Additional methodologies areneeded to investigate how the collectiveproperties of aneural network are related to its components. Computersimulations of neuralnetworks are crucialtoolsin thecurrent explosion of work in brain science. Although anatomical, physiological, and behavioralmethods continueto be fundamental, theoretical investigations of perceptual, cognitive, and motortasksare gaining increasing importance, thanks in part to the ability afforded by computers to implement and test formalmodelsof distributedbrain processes.
Many basic problems of skilled behavior can now bemodeled in sufficiently precise terms to permit formalmathematical investigation. Once a mathematical modelof neural functioning is formulated, the investigation ofits properties mayculminate in the proofof theorems concerning the stability or convergence behavior of themodel, as in Cohen and Grossberg (1983). Certainclassesof models of neurallybased processes, however, particularly those involving large and hierarchically organizedsystemsof nonlinearordinary differential equations,arecharacteristically difficultto analyzethroughpurely formal procedures. For these systemsthere may be no wayto determine the output of the model when given a certain input, shortof running the model in a numerical computer simulation. Thus, "experiments" can be run on a
Stephen Grossberg's work was supported in part by the Air ForceOffice of Scientific Research (AFOSR85-0149 and AFOSRF4962Q86-C-0037), the Anny ResearchOffice (ARODAAG-29-85-K-Q095),andthe National Science Foundation (NSF1ST-84-17756). EnnioMingolla's work was supported in part by the Air Force Office of Scientific Research(AFOSR 85-0149). We wishto thankCynthiaSuchtaforher valuableassistance in the preparationof the manuscript and illustrations.Addresscorrespondence to EnnioMingolla,Center for Adaptive Systems, Boston University, III Cummington Street, Boston, MA02215.
model in ways that are similar in some respects to experiments run on human or animal subjects.
Models, by definition, do not contain all the richnessof the biological processes theymodel; theirvery explanatory power comes in part from their greater simplicity.Nevertheless, oncethe component mechanisms of a modelare known to be qualitatively valid, computersimulationshave certaindistinctadvantages over experiments on actual organisms. Simulations can be cheaper and faster,but more importantly, they permit a much more preciselevelof controlof manyvariables thancouldeverbe realized in physiological or behavioral experimentalparadigms. Thus,parameters in a modelcanbe perturbed,or entire components of the model can be deleted orreplaced with other mechanisms, by changing the appropriate parts of computer programs. Such systematicinvestigations can yield a deeper appreciation of the modeledmechanisms and their variants, bothnormalandabnormal; suggestions for corroborative experiments on liveorganisms; and even general design insights that can, attimes, be formalized into mathematical proofsthat wouldotherwise have been difficult to discover.
Simulation of a Neurally Based Modelof Boundary Completion
This articlepresentstwo examplesof the way in whichperforming computersimulations has helpedthe developmentof a perceptual theory, whose formalequations arelistedin the Appendix. As theseexamples illustrate, eachof the processing stagesused in the model is essentialforgenerating its formal perceptual properties. In this limitedsense, at least, themodel is a minimal model of theproperties that it sets out to explain.
The firstexample involves variations of simulations thatwere first presented by Grossberg and Mingolla (1985a),whoexamined certainproblems in boundary detection andcompletion faced by mammalian visual systems. Earlyvisualprocessing by orientationally tuned,contrast-drivencells necessarily involves problems of positional andorientational uncertainty. For example, the very elongationof cellreceptive fields (masks) necessary for preferen-
601 Copyright 1986 Psychonomic Society, Inc.

602 GROSSBERG AND MINGOLLA
tial responses to oriented contrasts along straight luminance borders implies attenuated responses by thesereceptive fields at line ends and comers, as indicatedinFigure 1. We summarize this propertyin terms of an uncertainty principle, namely, that orientational certaintyimplies positional uncertainty at line endsand comers.Figure 2 showsa computersimulation depictingthis uncertainty at a line end.
According to our theory, the spatial pattern of earlyboundarydetection signalsdepictedin Figure 2 requiressubsequent processing whereby the positional uncertaintyat line ends and comers is overcome. To this end, themask responses in Figure 2 act as an input pattern to alater processing stagethat preservesthe strongresponsesat the line's long edges, but also completes the representationof the lineat its end (Grossberg & Mingolla, 1985a,1985b). We call the emergent pattern of activity at theend of a line an end cut, an exampleof which is shownin Figure 3.
The processing stages that are hypothesized to generate end cuts are summarized in Figure 4. These processing stages have also been used to analyzea wide varietyof perceptualand neural data (Grossberg, in press a, in
, * flIt:, * II Iii
* tl I I! it
I fil! 1\ if
, I ~!. 'I.,,I #,Iil if
, I #'11 if, I fi I; ,: @
, I F tl .,t:.
,* f;I'II@'IfIll'!
* ~··I;:t
I til',I f ;1 ,
I I'I 4; .'t... ii' \~
ii'll t I!1;'lt I
, I. ';t IN I Ii if I
*" ·1 "t *ilili+t *,illtt I
i· I I if I00 I I ;f I.: .it *
" # *i
Figure 1. Orientational speculCity at figural edges, comers, andexteriors. <a)At positions that are along a figural edge but not at af"JgUl"a1 corner, suchas A, the oriented mask parallel to the edgeis bigbly favored. At positions beyond the edge, such as D, masksof the same orientation are still partially activated. This tendencycan, in the absence of compensatory mechanisms, support a flowof dark featurai activity down and out of the black f"JgUI'e. (b) Aline is thin, functionally speaking, when at positions near a comer,such as C, many masks of different orientations are all weakly activated or not activated at all.
(a)
A
B
(b)
Figure 2. An orientation field: Lengths and orientations of linesencode the relative sizes of the activations and orientations of theinput masks at the corresponding positiom. The input pattern, whichis a vertical line end as seen by the receptive fields, corresponds tothe shaded area. Each mask hastotal exterior dimensions of 16 x 8units, with a unit length being the distance between two adjacentlattice positions.
pressb; Grossberg& Mingolla, 1985a, 1985b,in press).First, orientedreceptivefieldsof like positionand orientationbut oppositedirectionof contrasts,cooperateat thenext processing stage to activate cells whose receptivefields are sensitive to the same position and orientationas themselves, but which are insensitive to direction ofcontrast. These target cells maintain their sensitivity tothe amount of oriented contrast, but not to the directionof this oriented contrast. The computer simulation summarized in Figure 2 depicts the responsesof cells at thisprocessing stage. Such model cells, which play the roleof complexcells in Area 17of the visualcortex, pool inputsfrom receptive fields withopposite directions of contrast in order to generateboundarydetectorsthat can detect thebroadestpossible rangeof luminance or chromaticcontrasts (Grossberg, in press a; Thorell, DeValois, &Albrecht, 1984). These two successive stagesof orientedcontrast-sensitive cellsare calledthe OCfilter (Grossberg& Mingolla, 1985b).
TheoutputfromtheOC filter successively activates twotypes of short-range competitive interaction, whose neteffect is to generate end cuts. First, a cell of prescribedorientation exciteslike-oriented cellscorresponding to itslocationand inhibits like-oriented cells corresponding to

COMPUTER SIMULATION OF NEURAL NETWORKS 603
TO COOPERATION
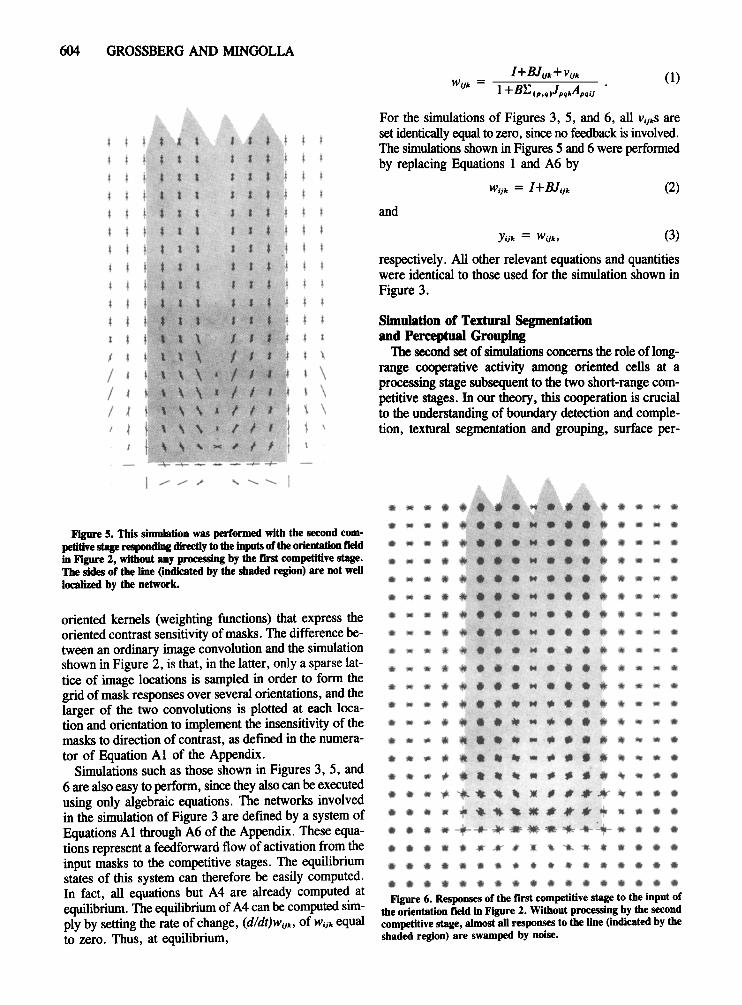
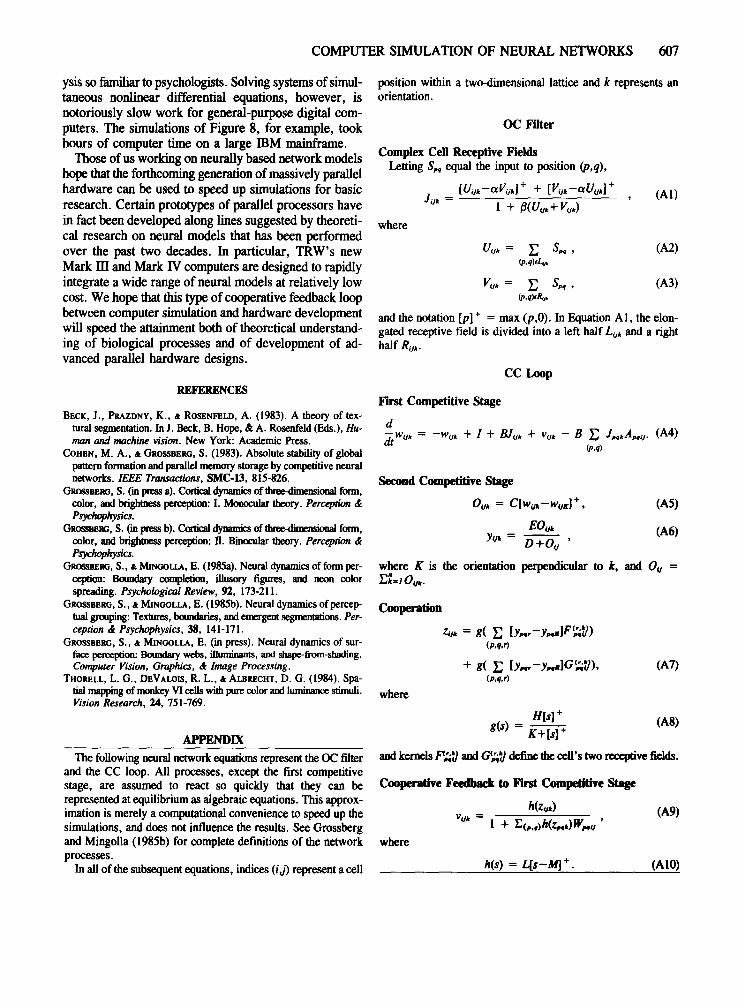
directly to thesecond competitive stage; thusthe firstcompetitive stage is eliminated and the mask field patternshownin Figure 2 is inputdirectlyto the secondcompetitive stage. Figure 6, conversely, showsthe outputof thefirst competitive stage to the input signal pattern shownin Figure 2. Together, Figures 5 and 6 illustratethe importance of coupling the two successive competitivestages.Without the first competitive stage(Figure 5), theoutputpatternhas a broad bandof vertically orientedactivity along the sides of the line, thereby failing to adequately localize the sides of the line itself. Without thesecond competitive stage(Figure6), almost all signals areswamped by noise.
Implementation of Simulations UsingAlgebraic Equations
Simulations of thekindshownin Figure 2 are relativelyeasyto perform, in termsof bothprogramming difficultyand computerprocessing time, because they involve onlyalgebraic calculations of contrast distributions in an image. (See Appendix, EquationAI.) In imageprocessingterms, one performs a convolution of the image with
I _
, -
, -, -
, -, -, -
· -
· -· -
\ ,
..... .,. ;r -t .,.
, " j '\
o/J ..... *'"" '* i-
...
J I I J
J I I I
J • ... ... .. .. 1
J I
I I
.......:...... "."."'-"'.• 1 .... .. • I
• I .. .. • I
1.' ..... ..-1' \-t • , , M , , • ~ x - - -
" '\.,-:jI. ........
t '*'
- •- •
- - - •- - - I
- I
- -- I
- - - •- -- I
- I
- ,- L
- 1
- ~ - j..
Figure 3. Responsesof a network with two stages of short-rangecompetitionto the orientation fieldof Figure 2: A processcalled endcuttinggenerates horizontal activations at line end locations thatreceive small and orientationaDyambiguous input activations.
nearby locations at the next processing stage. In otherwords, an on-center off-surround organization of likeoriented cell interactions exists around each perceptuallocation. The outputs from this competitive mechanisminteract with the second competitive mechanism. Here,cells compete that represent different orientations, notably perpendicular orientations, at the same perceptuallocation. This competition defines a push-pull opponentprocess. If a given orientation is excited, then the perpendicular orientation at its location is inhibited. Ifa givenorientation is inhibited, then the perpendicular orientation at its location is excited via disinhibition.
These competitive rules generateend cuts as follows.The strongvertical activations alongtheedgesof a scenicline, as in Figure 2, inhibit the weak verticalactivationsnear the line end. These inhibited verticalactivations, intum, disinhibit horizontal activations near the line end,as in Figure 3. Thusthepositional uncertainty at lineendsthat is causedby orientational tuning is eliminated by theinteraction of two short-range competitive mechanisms.
The properties of the two stagesof competition can beformally dissected through the useof simulations thatomitoneor theotherstage. Figure 5 showstheeffects of feeding signals proportional to the output of oriented masks
Figure 4. Early stages of boundary contour processing: At eachposition exist cells with elongated receptive fields of various sizesthat are sensitiveto orientation, amount of contrast, anddirectionof contrast. Pairs of such cellsthat are sensitiveto like orientationbut to opposite cIirecticIm of contrut (lowerdubed box)input to cellsthat are sensitive to orientation and amount of contrast but not todirection of contrast (white ellipses). These cells, in turn, excitelikeoriented cells corresponding to the same position and inhibit likeoriented cells corresponding to nearby positions at the ftnt competitivestage (upper dashed boxes).At this stage, cellscorresponding to the same position but to different orientations inhibit eachother via a push-pull competitive interaction.
604 GROSSBERG AND MINGOLLA
I+BJijk+Vijk
1+BE (p,q,Jpq,.Apqii
(1)
and
respectively. All other relevant equations and quantitieswere identical to thoseused for the simulation shown inFigure 3.
(2)
(3)
For the simulations of Figures 3, 5, and 6, all VijkS aresetidentically equal to zero, since nofeedback is involved.Thesimulations shown in Figures 5 and6 wereperformedby replacing Equations 1 and A6 by
Simulation of Textural Segmentationand Perceptual Grouping
Thesecond set of simulations concerns theroleof longrange cooperative activity among oriented cells at aprocessing stagesubsequent to the two short-range competitive stages. In our theory, this cooperation is crucialto the understanding of boundary detection and completion, textural segmentation and grouping, surface per-
IIIIIIIII
III 1
* \I \
l \
~ \~ \
li'l
.:: IIi II; 1,Ii I~~;I
i'il if·11
II ..".~IIIIr I '~"
:. il:I. :1 I:II ·,ttIi
IIIIIIIIIII
1 *! */ I
/ I
I ~
I ~
Figure 5. This simulation was performed with the second competitive stage responding directly to the inputs of theorientation fieldin Figure 2, without any processing by the first competitive stage •The sides of the line (indicated by theshaded region) are not welllocalized by the network.
oriented kernels (weighting functions) that express theorientedcontrastsensitivity of masks. Thedifference betweenan ordinary imageconvolution and the simulationshownin Figure 2, is that, in the latter, onlya sparselattice of image locations is sampled in order to form thegrid of maskresponses over severalorientations, and thelarger of the two convolutions is plotted at each location and orientation to implement the insensitivity of themasksto direction of contrast,as defined in the numerator of Equation Al of the Appendix.
Simulations such as those shown in Figures 3, 5, and6 arealsoeasyto perform, since theyalsocanbe executedusing only algebraic equations. The networks involvedin the simulation of Figure 3 are defined by a system ofEquations Al through A6 of the Appendix. Theseequations representa feedforward flowof activation fromtheinput masks to the competitive stages. The equilibriumstates of this system can therefore be easily computed.In fact, all equations but A4 are already computed atequilibrium. Theequilibrium of A4canbe computed simply by setting the rate of change, (d/dt)Wijk' of Wijk equalto zero. Thus, at equilibrium,
4i; ", '~...• • • • •••~, '•.."4 .A-· •••••.... ~•••••.....::::::~:::~::::::.... ~ ~ .........~ ..... ~••..........•••••••• ~ ••• * •••••••••••••••••••••.... ~••...••.....••••••••••••••••••••••••••••••••••.....•••. ~ .•••• _•• *- ••• ~ ••••....•••..-.. ~ .• • • # •• ~ *. ~ * •• ~ .••• # ••••••••• - ••••••• ~••_••••* ••••••• *+•••••••~ ••••• • • • • * ~ # • ~ ~ • • • • • •
• • • • • • • • • • • • • • • • •• • • • • • • • • • • • • • • • •Figure 6. Responses of the first competitive stage to the input of
the orientation field in Figure 2. Without processing by the secondcompetitive stage, almost all responses to the line (indicated by theshaded region) are swamped by noise.

1
+(v)
+
0000
o 00
OC FILTER
CC LOOP
ORIENTED
COOPERATION
+ .l:.j(Y)~(W)ON
INPUTS
Figure 7. An overviewof cooperative feedback. (a) 11lepUr ofpathways 1 activate positive boaDcWy compIetioD feedback aIoagpathway 2. Thenpathwayssuch • 3 adil'lIfe pcJIIitift ree.t.k aIoDgpathwayssuch • 4. Rapid completion ofa sbarp bouDdIry betwemthe locations of pathways 1 can hereby be generated by a spatiallydiscontinuous bisection process. (b) Circuit diagram of the B0undary CootourSystem:IDputs adivlIte orIeuted IIIIIlIb, .......CIlIOpei*
at eadt positioo and orieIatioo beforefeediDI iDtoan 0IH:eIIIts' offsurround 1nteractioD. 'Ibls intendion emtes IIke-orieDted eels atthe samepositioo and iDhibits Jike.GrieaIed ceIs lit MUtJy ..........The affected eels are 0IH:eIIs within a dipole 1leId. 0D-ceIs at afixed positioo compete lIIDOIIIorieo....... 0D-ceIs aIlIo iDIIiIJit offcellsthat represent the same positioD and orieDtatioo. OIf-cels ateadt positioo, in turn, compete lIIDOIII orieDtatio-. IIodt 0IH:eIIsand olf-cells are toDieaUy active. NeteD:itatioaofan oo-ceD emtesa similarly oriented cooperative receptive IleId at • locatioacorrespoocIing to that of the oo-ceD. NeteD:itatioa of an off-all iDIIiIJitsa similarly oriented cooperative receptive IIeIdof • bipoIe cell ata IocatiooCOI'I"eSpOIlCI to that of the off-ceU.'IbuI, bottom-upexcitation of a vertical oo-ceD, by inbibitinl the borizoataI oo-ceD atthat position,disiDbIbits tile IIoriIloaDI off-alilt tbIt pcIlIitioa, .......in turn inbibits (almost) borizoatlIIIy orieIIted coopentive receptivefields that include its po8!tion.SufIIdentIy strong net positiveactivation of both receptive fields of a cooperative cell enables the cellto genente feedbeckvia an CJIIoCeDter off1lllTOUllll iota8diuu IIIDlIIIIUke-oriented cells. 0n-ceIIsthat receive the IDOIIt favorable c0mbination of bottom-up signals and top.down signals generate the emergent perceptual grouping. The Ietten in this figure are keyed to thevariables in the Appendix.
(b)
COMPUTER SIMULATION OF NEURAL NETWORKS 605
(a) • ~
The Postulate of Spatial ImpenetrabilityBecausethe only inputsfor the simulation summarized
in Figure 8b were the vertical activities shown inFigure 8a, it is clear that the emergenthorizontalgroupings came about through horizontalcooperativeactivityinducedby horizontal end cut signals that are generatedat the ends of Lines by the second competitive stage. Ifsuch horizontalend cuts induce horizontalgroupings atlineends, however, whydo thehorizontal signals inducedalongthe sidesof the Linesnotalsogroup, therebyflooding the entire region between Lines with activity? Precisely this event is shownin Figure 8c, which showstheresults of a simulation run not on our actual model buton a variation of it.
Our actual CC loop model (Figure 7b) avoids the disaster shownin Figure Be by instantiating a computationalpropertythat implements whatwe havetermedthepostu-
ception, and the perception of illusory contours (Grossberg & Mingolla, 1985b, in press). The cooperation ismediated by oriented cellswithtwo separately thresholdedreceptivefields, as indicatedin Figure 7. The alignmentof the two receptive fieldweighting functions is suchthat,for example, a horizontally oriented cooperative cell tendsto fire whenever it receives sufficiently strongsignals fromapproximately horizontally oriented cells of the secondcompetitive stageto both receptive fieldssimultaneously.When the cooperativecell fires, it sends excitatory signalsback to the similarlyorientedcells corresponding toits positionat the first competitive stage, and inhibitorysignals to similarly orientedcellscorresponding to nearbypositions. Thesetop-downsignalsset up a feedback loopbetween the long-range cooperative process andthe shortrangecompetitive processes. Thiscooperative-competitivefeedbackprocess is called the CC loop. The designconstraintsleadingto the entire systemfor implementing theCC loop are beyondthe scope of this article, and can befound in Grossberg and Mingolla (1985b). The role ofcomputersimulations in the formulation of one key functional capacity of the CC loop is instead described indetail.
Figure 8 presents the results of two separate simulationsof texturalgrouping. Figure 8a showsthe inputpattern that is presented to the CC loop. The pattern consists of nine clusters of 18 vertically oriented maskresponses. We call each cluster a Line because it is acaricature of how a finer latticeof masks would respondto an actual line. Figure 8b displays the pattern ofequilibrium activities that is generatedby this inputat thesecondcompetitive stageof the full model, including CCloop feedback. This simulation is a success because,withoutany preassignedtemplateor externalprompting,the network has automatically regulated itself to anequilibrium state wherein each Line, besides being surroundedby its own boundaryactivity, is alsoemergentlygrouped with neighboring vertical and horizontal Linesin a mannersimilarto that found in human perception (seeBeck, Prazdny, & Rosenfeld, 1983, for an excellentreview).

606 GROSSBERG AND MINGOLLA
second competitive stageinput impenetrable penetrable
III III 'I' '" ,,' '" '" '", , , , , , , , , , , ,
il! '" '", , , ,
, , ' , , , , ,II III , , , , ,., '" ... '"
Iii III iii ' , , , , , ."'"
, , ' , ,III ! ! ,., , , , ,
-I" , , , , ,'" '"
Iii III '" -1'1 ,.,Iii'"
, , , , , ," '"I" ill Iii , , , ,
til '" '" '" '" '" '"(a) (b) (c)
Figure 8. Computersimulatiom of processing underlying texturalgrouping. The length of each line segment is proportional to the activation of a network node responsive to one of 12 possible orientations. Part (a) displays the activity of oriented cells that input tothe CC loop. Part (b) displays the groupings sensed by our actualmodel network. Part (c) displays the resulting ftooding of boundary activity that occurs when the model's mechanism for spatial impenetrability is removed. Seetext for details of the two simulationsshown in (b) and (c).
late of spatial impenetrability. This postulate acknowledges the need to prevent the cooperative processfrom being able to leap across, and thereby penetrate, allintervening percepts. Figure 9 motivates the mechanismsthat we have developed to implement the postulate of spatial impenetrability. Figure 9 shows the left halves of thereceptive fields of two horizontally tuned cooperativecells. In our actual model, horizontal activations at thesecond competitive stage that fall within such a horizontally tuned cooperative cell's receptive field generate excitatory inputs to the receptive field. Vertical activations,in contrast, generate inhibitory inputs to the receptivefield. (The pairing of excitatory and inhibitory inputs atperpendicular orientations is represented by the termsypqr-ypqR in Equation A7.) Thus, by summing excitatoryand inhibitory inputs from the second competitive stage,the left receptive field of the lower cooperative cell ofFigure 9 can be excited above threshold, because of thepreponderance of horizontals from the end cut. On theother hand, the upper cooperative cell's left receptive fieldreceives net inhibition because signals from the six vertical segments overwhelm those from the four horizontals.Our neural model of how both excitatory and inhibitorysignals input to a cooperative cell assumes that on-cellsgenerate the excitatory inputs and off-cells generate theinhibitory inputs from the second competitive stage. Thesecells, taken together, are called a dipole field, as illustrated in Figure Th.
The model variation whose noisy output is shown inFigure 8c was achieved by removing the inhibitory effects of signals oriented orthogonally to the cooperativecell's preferred orientation (-ypqR) while keeping the excitatory effects of signals at the same orientation as thecooperative cell itself (ypqr). Indeed, along with study ofperceptual and physiological data and earlier theoreticalresults, observation of simulations such as that shown in
Figure 8c played a crucial role in our development of theCC loop model in its present form.
Implementation of PerceptualGrouping Simulations
Performing the simulations of Figure 8 involves morecomplexity than is apparent from the output displays themselves. For example, the lattice of network nodes contains 12 orientations at each of 40 x 25 spatial locationsfor five network processing stages. This means that 60,000nonlinear ordinary differential equations must be solvedto perform each of the simulations in Figure 8. One factor prevents the computational demands from being completely unmanageable: Some of the equations can besolved algebraically, in the same manner as those for theend cut simulations (Figure 3). Because the full modelinvolves feedback, however, the use of algebraic approximations requires explicit assumptions about reaction rateswithin the model. That is, those stages whose equilibriaare computed algebraically are assumed to equilibratemore rapidly than do the other stages. The Appendixdescribes which equations were solved algebraically andwhich were solved through numerical integration.
For the simulations of Figure 8, the numerical integration of the differential equations not solved algebraicallywas carried out using the DGEAR subroutine package ofthe IMSL Library, which is commonly available at university computational facilities. Using IMSL is not muchmore difficult than using the packages for statistical anal-
Figure 9. A mechanism to implement the postulate of spatial impenetrability: The left receptive fields of two horizontally tunedcooperative cells are crossed by a thin vertical Line. Althoughhorizontal end-cut signals can excite the upper receptive fJeld, theseare canceUed by the greater number of inhibitory inputs due to thevertical Line inputs. Within the lower receptive field, the excitatory inputs due to end cuts prevail.
COMPUTER SIMULATION OF NEURAL NETWORKS 007
OC Filter
CC Loop
position within a two-dimensional lattice and k represents anorientation.
and the notation [pI + = max (p,O). In EquationAI, the elongated receptive field is divided into a left half LUk and a righthalf Ruk.
(A2)
(A3)
o.; = E s.:(p,q)u..,.
V ii k = E Spq,(p,q)<Ru•
where
Complex Cell Receptive FieldsLetting S,. equal the input to position (p,q),
[Viik-aViikJ+ + [~ik-aVukJ+ (AI)JVk = -'------------'--• I + (3(VUk+VUk)
ysissofamiliar to psychologists. Solving systems of simultaneous nonlinear differential equations, however, isnotoriously slow work for general-purpose digital computers. The simulations of Figure 8, for example, tookhours of computer time on a large mM mainframe.
Those ofus working on neurally based network modelshope thattheforthcoming generation of massively parallelhardware can be used to speedup simulations for basicresearch. Certain prototypes of parallel processors havein factbeendeveloped along linessuggested by theoretical research on neural models that has been performedover the past two decades. In particular, TRW's newMark ill andMarkIVcomputers are designed to rapidlyintegrate a widerange of neural models at relatively lowcost.Wehopethatthistypeof cooperative feedback loopbetween computer simulation andhardware developmentwillspeedthe attainment bothof theoretical understanding of biological processes and of development of advanced parallel hardware designs.
where
(AS)
(A6)
(A5)
(AlO)h(s) = L[s-M] + •
where
H[s] +
g(s) = K+[s)+
and kernelsp.;;''i) and G~'i) define the cell's tworeceptive fields.
Cooperative Feedback to First Competitive Stage
h(ZUk) (A9)VUk = I + E<,••)h(z...k)W.../j ,
First Competitive Stage
ddtWiik = -Wilk + I + BJUk + Viik - B E JpqkApqu. (A4)
(P.q)
Cooperation
Z/jk = g( E [Y...r-Y....JF~t/)(p,q,r)
+ g( E [Y...r-Y....]G~V>, (A7)(p.q,r)
Second Competitive Stage
0Uk = C[WUk-WUJr) + ,
EOUk
YUk = D+Ou
'
where K is the orientation perpendicular to k, and OuEZ=lO/jk'
BECK, J., PRAZDNY, K., &; ROSENfELD, A. (1983). A theory of textural segmentation. In J. Beck,B. Hope,& A. Rosenfeld (Eds.), Human and machine vision. New York: Academic Press.
COHEN, M. A., &; GROSSBERG, S. (1983). Absolutestabilityof globalpattern formation andparallelmemorystorageby competitive neuralnetworks. IEEE Transactions, SMC-13, 815-826.
GROSSBERG, S. (in press a). Cortical dynamics oftMe-dimensional form,color, and brightness perception: I. Monocular theory. Perception &Psychophysics.
GROSSBERG, S. (in press b). Cortical dynamics of tMe-dimensional form,color, and brightness perception: n. Binocular theory. Perception &Psychophysics.
GROSSBERG, S., &; MINGOLLA, E. (1985a). Neural dynamics of formperception: Boundary completion, illusory figures, and neon colorspreading. Psychological Review, 92, 173-211.
GROSSBERG, S., &; MINGOLLA, E. (l985b). Neuraldynamics ofperceptualgrouping: Textures, boundaries, and emergent segmentations. Perception & Psychophysics, 38, 141-171.
GROSSBERG, S., &; MINGOLLA, E. (in press). Neural dynamics of surface perception: Boundary webs, illuminants, and shape-from-shading.Computer Vision, Graphics, & Image Processing.
THORELL, L. G., DEVAWIS, R. L., &; ALBRECHT, D. G. (1984). Spatialmapping of monkey VI cellswithpurecolorand luminance stimuli.Vision Research, 24, 751-769.
The following neuralnetwork equations represent the OC filterand the CC loop. All processes, except the first competitivestage, are assumed to react so quickly that they can berepresented at equilibrium as algebraicequations. This approximationis merelya computational convenience to speed up thesimulations, and does not influence the results. See Grossbergand Mingolla (1985b) for completedefinitions of the networkprocesses.
In all of the subsequent equations, indices (i J) represent a cell
REFERENCES
APPENDIX





























