Embed Size (px)
Citation preview

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
1
Abstract— Smart grid (SG) technology transforms the traditional
power grid from a single layer physical system to a cyber-physical
network that includes a second layer of information. Collecting,
transferring, and analyzing the huge amount of data that can be
captured from different parameters in the network, together with
the uncertainty that is caused by the distributed power generators,
challenge the standard methods for security and monitoring in
future SGs. Other important issues are the cost and power
efficiency of data collection and analysis, which are highlighted in
emergency situations such as blackouts. This paper presents an
efficient dynamic solution for online SG topology identification
and monitoring by combining concepts from compressive sensing
and graph theory. In particular, the SG is modeled as a huge
interconnected graph, and then using a DC power-flow model
under the probabilistic optimal power flow, topology identification
is mathematically reformulated as a sparse recovery problem.
This problem and challenges therein are efficiently solved using
modified sparse recovery algorithms. Network models are
generated using the MATPOWER toolbox. Simulation results
show that the proposed method represents a promising alternative
for real time monitoring in SGs.
Index Terms— Smart grids, topology identification and fault
detection, cyber-physical systems, compressive sensing (CS),
sparse recovery.
I. INTRODUCTION
N intelligence revolution is happening in the technology
of power grids, supporting the development of so-called
smart grids (SGs). Roughly speaking, “the term SG
refers to electricity networks that can intelligently integrate the
behavior and actions of all parameters and users connected to
them” [1]. This revolution transforms a traditional power grid
from a single-layer physical system into a huge cyber-physical
network, using a layer of information that flows through the
system. This information includes the status of several
parameters in the network such as bus voltages, active and
reactive powers, phase angles, branch currents, and load
consumption, in addition to the actuating or controlling
commands fed back to the network from controllers and
decision making units [1]-[4], [26]-[27].
Manuscript received September 16, 2015; Revised November 23, 2015;
Accepted for publication January 5, 2016. This work was partially supported
by Petroleum Institute (PI) grant 470039, and NSF CAREER grant CCF-
1149225. Copyright © 2016 IEEE. Personal use of this material is permitted.
However, permission to use this material for any other purposes must be
obtained from the IEEE by sending a request to [email protected]. M. Babakmehr is with the Electrical Engineering and Computer Science
Department, Colorado School of Mines, Golden, CO, 80401, USA, (phone:
303- 273-3562, e-mail: [email protected]). M.G. Simões, M.B. Wakin and F. Harirchi are with the Electrical
Engineering and Computer Science Department, Colorado School of Mines, Golden, CO, 80401, USA, (e-mails: [email protected];
[email protected] and [email protected]).
Thus, SGs can be also considered as one of the pioneering
networked control systems [32]. Another important feature of
next generation SGs is the aggregation of renewable energy
micro-sources in distributed generation technology [5]. The
nature of the injected power from renewables as wind turbines
and solar panels is inherently random. This randomness, along
with the uncertainty in the load, lead to probabilistic behavior
in the load-power flow at buses. The probabilistic optimal
power flow (P-OPF) problem has been fully discussed in [6]-
[8] and references therein.
Collecting, transferring, and analyzing the huge amount of
data flowing through the information layer of the SG, together
with the uncertainty caused by distributed power generators and
load characteristics, challenge the standard methods for
security, monitoring, and control [1]-[4] and [33]-[34].
Identifying changes of lines is particularly critical for a number
of tasks, including state estimation, optimal power flow, real-
time contingency analysis, and thus, security assessment of
power systems [7]. Other important issues are the cost and
power efficiency of real-time data collection and analysis [10].
The Supervisory Control and Data Acquisition (SCADA)
system and Wide Area Mentoring System (WAMS) provide
voltage and power data for each local system in near real time
[2]-[4], [26]-[27]. The most popular sensing technology used
widely in SG data collection systems is the synchronous Phasor
Measurement Unit (PMU) [4]. The system data exchange
(SDX) module of the North American Electric Reliability
Corporation (NERC) provides network-wide topology status on
an hourly basis [10]; however, in order to transform the PN into
a smart network a near real-time monitoring of system topology
and transmission lines status is mandatory.
The power network (PN) topology identification (TI)
problem has been addressed in [9] based on a consuming or
economic approach. Some related work has addressed the
problem of fault or power line outage identification (POI) using
PMU data in a power grid; see [7], [10]-[14] and references
therein. In this work, we introduce an efficient and low cost
solution for TI (that can also be used to solve the POI problem)
using a few measurements of the system parameters. Our work
combines sparse sampling theory from the field of Compressive
Sensing [20] with concepts borrowed from graph theory [15].
Most of the previous approaches (which are mainly focused on
POI) rely on a DC linear power flow model [7], [10]-[14].
Using this approximated model, the PN is modeled as a graph
and the POI problem is expressed in terms of certain matrices
defined by this graph. In some recent works, POI is formulated
as a combinatorially complex (integer programming) problem,
which is computationally tractable only for single or, at most,
double line changes (refer to [10]). Due to the discrete
formulation of the problem, the optimal solution can be found
Mohammad Babakmehr, Student Member, IEEE, Marcelo G. Simões, Fellow, IEEE,
Michael B. Wakin, Senior Member, IEEE, Farnaz Harirchi, Student Member, IEEE
Compressive Sensing-Based Topology
Identification for Smart Grids
A

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
2
through an exhaustive search (ES). However, the computational
complexity of such an ES is high, and thus it is inappropriate
from a time cost perspective. Moreover, coping with multiple
line changes is critical in the face of cascading failures in recent
blackouts, especially in case of large networks. This has
motivated a number of existing works [7], [10] and [13], which
consider handling multiple line outages. A recent alternative
approach to line-change identification adopts a Gauss–Markov
graphical model of the PN and can deal with multiple changes
at affordable complexity; the Gauss-Markov approach is based
on a stochastic characterization of power flows that models the
buses’ phase angles as Gaussian random variables and
comprehensively addresses their dependencies [7]. An
ambiguity group-based location recognition algorithm has been
also proposed for recognizing the most likely outage line
locations in multiple outages. Also recently a distributed
framework to perform the identification locally at each phasor
data concentrator has been presented in [12]. Moreover, another
approach considered the same problem under scenarios with a
limited number of PMUs [13]. Another new method for solving
the POI problem has been developed based on the theory of
quickest change detection [30]. Moreover, a non-iterative
method for wide-area fault location has been presented in [28]
which applies the substitution theorem. Most recently, a
sparsity-based method has been developed in order to address
the bad PMU data records and their imperfections in power
outage detection and localization. Sparse recovery has been
found recent interests in fault type identification and
localization in distribution networks as well [15]-[16]. For more
information on these approaches, please also refer to the
references therein.
In [10] and [24], the authors formulate POI as a sparse
recovery problem (SRP). Their method leverages the fact that
the number of outage lines after a failure represents a small
fraction of the total number of lines. A global stochastic
optimization technique based on cross-entropy optimization
(CEO) is introduced in [11]. The initial idea of this method is
based on the formulation presented in [10]. It has been shown
that CEO has better performance compared to [10] in general.
However, both of these methods require hourly basecase grid
topology information in addition to the system parameters to be
able to find the outage lines in the grid. In [10], the
measurement or sensing matrix of the SRP includes the
weighted Laplacian matrix 𝐵 (also called the topology,
structure, or nodal-admittance matrix) of the corresponding
graph of the power network, which is dependent on the previous
structure of the network and needs to have the topology
information of the graph delivered in an hourly manner. In [11],
the measurement vector is calculated from multiplication of the
same Laplacian matrix with the phase angle vector, so again
hourly basecase topology information from the grid is needed.
Moreover, the performance of most of the aforementioned
methods is highly related to the level of noise. It has been shown
in the literature ([10] and [11]) that the recovery performance
of these methods significantly decreases as the level of noise
increases, so in both of the approaches in [10] and [11], a pre-
whitening procedure is applied before further analysis. Another
important problem to be considered is the rank deficiency of the
matrix 𝐵. To shun the problems arising from this rank
deficiency, one of the network buses is normally considered as
the reference bus and its corresponding row and column are
removed from the matrix 𝐵; as a result, the nodal-admittance
matrix becomes full rank. Nevertheless, whenever the records
from the reference bus are affected by bad data (due to cyber-
attacks or any other precision deficiency issues,), the overall
procedure can be depraved. Another important issue is with the
mistakenly unreported switching events. These type of errors
can affect the configuration of the nodal-admittance matrix 𝐵.
This means that, if the last reported status of the topology of the
grid has not been stated within a suitable time interval the final
results can be disturbed. Moreover, to the best of our
knowledge, in most of the aforementioned methods the random
behavior applied by renewable energy sources and the
uncertainty in loads are not accounted. Finally, the
mathematical formulation of some aforementioned methods is
dependent on the connectivity of the power grid graph, where
they assume that the power outages may not be allowed to result
in islanding in any part of the network [10].
This work is based on the probabilistic power flow model.
Our approach is completely different from previous
formulations, in that the presented reformulation relies only on
the measurements from system parameters and does not need
any a priori information about the topology of the network. In
fact, we reformulate the topology identification problem in such
a way that the nodal-admittance or structure matrix itself, is the
direct output of the optimization problem. As a result, this
framework is capable of dealing with the aforementioned
imperfections. Case studies using standard IEEE test-beds [18]
show that the proposed method represents a promising new
strategy for topology identification, line change, fault detection,
and monitoring issues in SGs.
The rest of this paper is organized as follows. Section II
discusses the model of a PN as an interconnected graph and its
corresponding mathematical representation using a DC power
flow model. Section III presents the proposed sparse topology
identification technique. Moreover, it contains a short review
on CS and a short description of the SRP solvers to be used in
this paper. Simulation results of a study of the sensing matrix
coherence (Section III.A), the effectiveness of the algorithm,
and the results from applying a model of structured sparsity are
discussed in Section IV. Finally, Section V summarizes the
final conclusions of this paper.
II. POWER NETWORK MODEL AND CORRESPONDING GRAPH
In this section, the graph representation of a PN, its
corresponding matrices, and its connection with the DC power
flow model are described. Moreover, we discuss a random
Gaussian distribution assumption for the system (bus power and
voltage) parameters in a large SG with a considerable amount
of renewable energy sources.
A. Graph of the Power Network
We represent the PN as a graph 𝐺(𝑆𝑁 , 𝑆𝐸), consisting of a set
of 𝐾 nodes 𝑆𝑁 = {1, . . . , 𝐾}, where each node 𝑖 represents an
arbitrary bus of the SG, and a set of 𝐿 edges or transmission
lines 𝑆𝐸 = {𝑙𝑖,𝑗: 𝑖, 𝑗𝜖𝑆𝑁}, which connect certain nodes and form
the general structure or topology of the grid. Following the
approaches in [7], and almost all of examples from [10], we
assume that the data from the nodes’ parameters (such as power
and phase angles) are obtained from a network of sensors. The
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
3
main goal of this paper is to identify the structure or topology
of the PN in near real time using a small set of data, without any
a priori knowledge about the structure of the network.
Nowadays, a vast amount of work is focusing on power sensor
technology especially on software-based PMUs with much
lower costs per unit; [28] and the references therein.
B. DC Power Flow Model and Corresponding Graph of PN
The AC power-flow model, also known as the AC load-flow
model, is a numerical technique in power engineering, applied
to a power system in order to analyze the behavior of different
forms of AC power under normal steady-state operation. In
such a model two distinct sets of non-linear equations (called
power balance equations) indicate the relationship between
active and reactive power and the voltage magnitude and phase
angle as follows [19]:
𝑃𝑖𝑗 = 𝑔𝑖,𝑗𝑉𝑖2 − 𝑔𝑖,𝑗𝑉𝑖𝑉𝑗𝑐𝑜𝑠(𝜃𝑖 − 𝜃𝑗) + 𝑏𝑖,𝑗𝑉𝑖𝑉𝑗𝑠𝑖𝑛(𝜃𝑖 − 𝜃𝑗) (1)
𝑄𝑖𝑗 = 𝑏𝑖,𝑗𝑉𝑖2 − 𝑏𝑖,𝑗𝑉𝑖𝑉𝑗𝑐𝑜𝑠(𝜃𝑖 − 𝜃𝑗) + 𝑔𝑖,𝑗𝑉𝑖𝑉𝑗𝑠𝑖𝑛(𝜃𝑖 − 𝜃𝑗). (2)
Here 𝑃𝑖𝑗 and 𝑄𝑖𝑗 are the active and reactive powers injected from
node 𝑗 to node 𝑖, respectively; 𝑉𝑖 and 𝜃𝑖 represent the amplitude
and phase of the voltage on node 𝑖, respectively; 𝑔𝑖,𝑗 is the real
part of the admittance of the line 𝑙𝑖,𝑗 (or the conductance); and
𝑏𝑖,𝑗 is the imaginary part of the admittance of line 𝑙𝑖,𝑗 (or the
susceptance). It has been shown that when the system is stable,
under a normal steady-state condition, the phase angle
differences are small, meaning that 𝑠𝑖𝑛(𝜃𝑖 − 𝜃𝑗 ) ≈ 𝜃𝑖 − 𝜃𝑗.
Using this simplification and the DC power flow method
discussed in [19], the power injected to a distinct bus 𝑖 follows
the superposition law (in practical cases equation (4) cannot be
exactly validated):
𝑃𝑖 = ∑ 𝑃𝑖𝑗𝑗 = ∑ 𝑏𝑖,𝑗𝑗𝜖𝛮𝑖
(𝜃𝑖 − 𝜃𝑗) (3)
𝑄𝑖 = ∑ 𝑄𝑖𝑗𝑗 = ∑ 𝑏𝑖,𝑗𝑗𝜖𝛮𝑖
(𝑉𝑖 − 𝑉𝑗) . (4)
Here 𝛮𝑖 is the set of neighbor buses connected directly to bus 𝑖. It is useful to rewrite these summations in a matrix-vector
format, where we have:
𝑝 = 𝐵𝜃 𝑝𝜖𝑅𝐾 (5)
𝑞 = 𝐵𝑣 𝑞𝜖𝑅𝐾 . (6)
In this notation the voltage amplitude and voltage phasor angle
values from all of the nodes are collected in two vectors
𝑣, 𝜃 𝜖𝑅𝐾 , respectively. Also, the active and reactive power
values of all of the nodes are stored in the vectors 𝑝 and 𝑞,
respectively. The matrix 𝐵 ∈ 𝑅𝐾×𝐾 is called the nodal-
admittance matrix, describing a power network of 𝐾 buses, and
its elements can be represented in the following format:
𝐵𝑖𝑗 = {
−𝑏𝑖,𝑗 , 𝑖𝑓 𝑙𝑖,𝑗𝜖𝑆𝐸
∑ 𝑏𝑖,𝑗 , 𝑗𝜖𝛮𝑖𝑖𝑓 𝑖 = 𝑗
0, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
} (7)
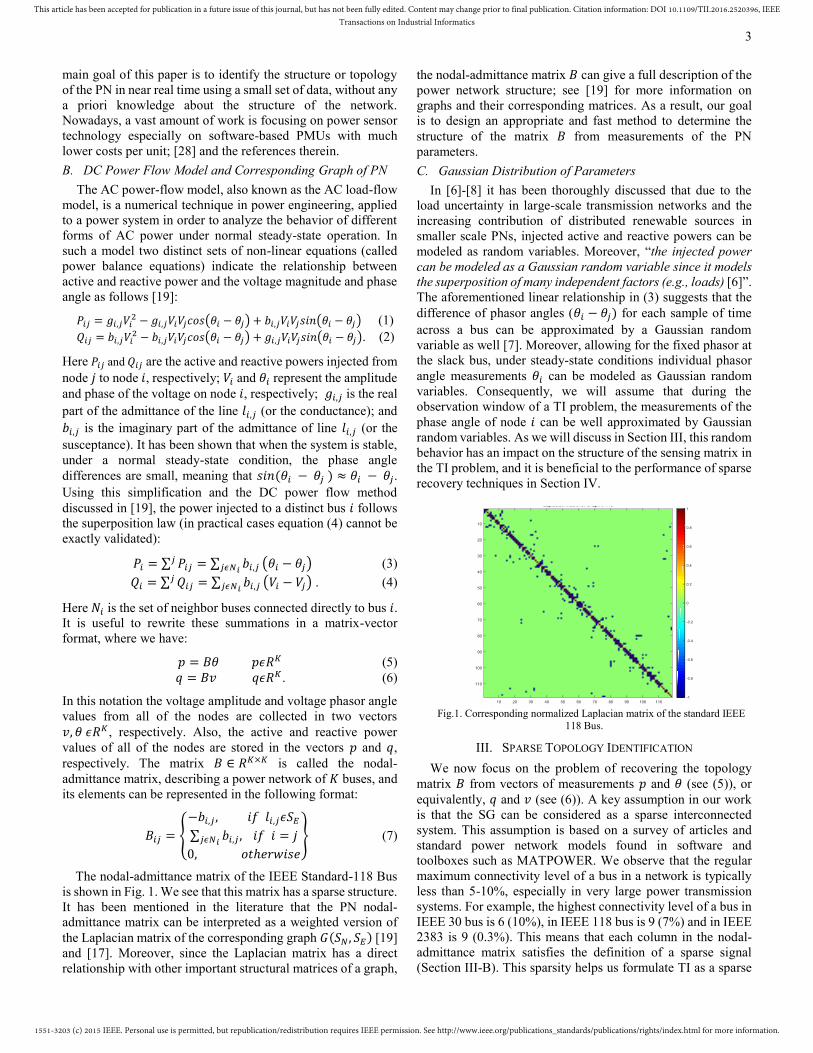
The nodal-admittance matrix of the IEEE Standard-118 Bus
is shown in Fig. 1. We see that this matrix has a sparse structure.
It has been mentioned in the literature that the PN nodal-
admittance matrix can be interpreted as a weighted version of
the Laplacian matrix of the corresponding graph 𝐺(𝑆𝑁 , 𝑆𝐸) [19]
and [17]. Moreover, since the Laplacian matrix has a direct
relationship with other important structural matrices of a graph,
the nodal-admittance matrix 𝐵 can give a full description of the
power network structure; see [19] for more information on
graphs and their corresponding matrices. As a result, our goal
is to design an appropriate and fast method to determine the
structure of the matrix 𝐵 from measurements of the PN
parameters.
C. Gaussian Distribution of Parameters
In [6]-[8] it has been thoroughly discussed that due to the
load uncertainty in large-scale transmission networks and the
increasing contribution of distributed renewable sources in
smaller scale PNs, injected active and reactive powers can be
modeled as random variables. Moreover, “the injected power
can be modeled as a Gaussian random variable since it models
the superposition of many independent factors (e.g., loads) [6]”.
The aforementioned linear relationship in (3) suggests that the
difference of phasor angles (𝜃𝑖 − 𝜃𝑗) for each sample of time
across a bus can be approximated by a Gaussian random
variable as well [7]. Moreover, allowing for the fixed phasor at
the slack bus, under steady-state conditions individual phasor
angle measurements 𝜃𝑖 can be modeled as Gaussian random
variables. Consequently, we will assume that during the
observation window of a TI problem, the measurements of the
phase angle of node 𝑖 can be well approximated by Gaussian
random variables. As we will discuss in Section III, this random
behavior has an impact on the structure of the sensing matrix in
the TI problem, and it is beneficial to the performance of sparse
recovery techniques in Section IV.
Fig.1. Corresponding normalized Laplacian matrix of the standard IEEE
118 Bus.
III. SPARSE TOPOLOGY IDENTIFICATION
We now focus on the problem of recovering the topology
matrix 𝐵 from vectors of measurements 𝑝 and 𝜃 (see (5)), or
equivalently, 𝑞 and 𝑣 (see (6)). A key assumption in our work
is that the SG can be considered as a sparse interconnected
system. This assumption is based on a survey of articles and
standard power network models found in software and
toolboxes such as MATPOWER. We observe that the regular
maximum connectivity level of a bus in a network is typically
less than 5-10%, especially in very large power transmission
systems. For example, the highest connectivity level of a bus in
IEEE 30 bus is 6 (10%), in IEEE 118 bus is 9 (7%) and in IEEE
2383 is 9 (0.3%). This means that each column in the nodal-
admittance matrix satisfies the definition of a sparse signal
(Section III-B). This sparsity helps us formulate TI as a sparse

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
4
recovery problem, which as supported by the theory of
Compressive Sensing, can be solved with a small set of
measurements in a fast and accurate way using SRP algorithms.
If the sparsity assumption is violated, however, the performance
of the algorithm will suffer. The formulation of TI as a SRP is
presented in Section III-A. Section III-B gives a short
background on CS. Finally, in Section III-C we introduce the
types of the SRP solvers used in this work.
A. Sparse Setup of Topology Identification Problem
Given an interconnected PN of 𝐾 buses, let the phase angle
and active power measurements of 𝑖𝑡ℎ bus be associated with
the following time series of 𝑀 sample times:
𝑝𝑖(𝑡) 𝑓𝑜𝑟 𝑡 = 1,2, . . . , 𝑀 (8)
𝜃𝑖(𝑡) 𝑓𝑜𝑟 𝑡 = 1,2, . . . , 𝑀 . (9)
As mentioned before, in the DC model, the (active or
reactive) power injected into a distinct bus 𝑖 follows the
superposition law (3) and (4). Since (4) cannot be validated
properly in some practical situations, we prefer to use (3) to
formulate the sparse TI problem. This means that, for each node
𝑖 in the network and at each sample time 𝑡, we have
𝑝𝑖(𝑡) = ∑ 𝑝𝑖𝑗𝑗 (𝑡) = ∑ 𝑏𝑖,𝑗𝑗𝜖𝛮𝑖
(𝜃𝑖(𝑡) − 𝜃𝑗(𝑡)) . (10)
As mentioned before, 𝑏𝑖,𝑗 is the susceptance along the line 𝑙𝑖,𝑗
under the DC model, and 𝛮𝑖 is the set of neighbor buses
connected directly to bus 𝑖. If we write 𝑏𝑖,𝑗 = 0 for 𝑗 ∉ 𝛮𝑖, we
can extend (10) as follows:
𝑝𝑖(𝑡) = ∑ 𝑝𝑖𝑗𝑗 (𝑡) = ∑ 𝑏𝑖,𝑗𝑗𝜖𝑆𝐾
𝑖 (𝜃𝑖(𝑡) − 𝜃𝑗(𝑡)) + 𝑢𝑖(𝑡) + 𝑒𝑖(𝑡), (11)
where 𝑆𝐾𝑖 is the set of all nodes in the network except node 𝑖 (so
the set 𝑆𝐾𝑖 contains 𝐾 − 1 nodes), 𝑢𝑖 is a possible leakage of
active power in node 𝑖 itself, and 𝑒𝑖 is the measurement noise.
Since we assume data is collected at 𝑀 sample times, we can
use matrix-vector notation to write
𝑝𝑖 = 𝐴𝑖𝑦𝑖 + 𝑢𝑖 + 𝑒𝑖, (12)
where, 𝑝𝑖 , 𝑢𝑖 , 𝑒𝑖𝜖𝑅𝑀. In equation (14) we have
𝐴𝑖 = [𝑎1,𝑖𝑇 , … , 𝑎𝑖−1,𝑖
𝑇 , 𝑎𝑖+1,𝑖𝑇 , . . . , 𝑎𝐾,𝑖
𝑇 ] 𝜖 𝑅𝑀×𝐾−1 (13)
𝑎𝑗,𝑖𝑇 = (𝜃𝑖(𝑡) − 𝜃𝑗(𝑡)) 𝜖𝑅𝑀 𝑓𝑜𝑟 𝑡 = 1,2, . . . , 𝑀 (14)
𝑦𝑖 = [𝑏𝑖,1, … , 𝑏𝑖,𝑖−1, 𝑏𝑖,𝑖+1, . . . , 𝑏𝑖,𝐾]𝑇
𝜖𝑅𝐾−1. (15)
Each column of the matrix 𝐴𝑖 represents the difference of phase
angles between node 𝑖 and one node 𝑗𝜖𝑆𝐾𝑖 in the network across
𝑀 samples of time. As discussed in Section II-C, this difference
can be modeled as a Gaussian random variable. The vector 𝑦𝑖
is a sparse vector, with all of its elements equal to zero except a
small portion, which are located in those positions
corresponding the (few) neighbors of node 𝑖. Summing over 𝑢𝑖
and 𝑒𝑖 (modeled as a vector of white Gaussian noise), we reach
the following equation for each individual bus:
𝑝𝑖 = 𝐴𝑖𝑦𝑖 + 𝜂𝑖 . (16)
1 The notation in this Section matches that in Section III-A, except for
convenience we suppose the unknown vector 𝑦 has length 𝐾 rather than 𝐾 − 1.
The TI problem can be viewed as the estimation of all vectors
{𝑦𝑖}𝑖=1𝐾 that best match the observed measurements {𝑝𝑖}𝑖=1
𝐾 . In
order to solve such a problem, we can define the following
optimization problem:
𝑚𝑖𝑛{�̂�𝑖}𝑖=1
𝐾∑ ‖𝐴𝑖�̂�𝑖 − 𝑝𝑖‖2
2𝐾𝑖=1 . (17)
Problem (17) can be solved individually for each node 𝑖. If 𝐴𝑖 is full rank, the number of measurements 𝑀 exceeds the
number of unknowns 𝐾 − 1, and the variance of the noise
vector, 𝜂𝑖, is small enough, this optimization problem can be
solved using Least Square (LS) techniques. Since the value of
𝐾 depends on the number of buses in the grid, a large number
of measurements 𝑀 will be needed to solve this problem in the
case of large power grids. In order to avoid this problem, we
suggest using sparse recovery techniques [20] to solve for the
vectors {𝑦𝑖}𝑖=1𝐾 . Since each vector 𝑦𝑖 is sparse, we can view the
goal in (16) as recovering an S-sparse vector 𝑦𝑖𝜖𝑅𝐾−1 from a
set of observations 𝑝𝑖𝜖𝑅𝑀, where 𝐴𝑖𝜖𝑅𝑀×𝐾−1 is the sensing
matrix, 𝜂𝑖𝜖𝑅𝑀 is a vector of white Gaussian noise, and 𝑆 is the
number of nodes which are directly connected to the one
individual node 𝑖 for which we are solving the problem. In
general we want 𝑀 ≪ 𝐾 so the problem can be solved using a
reasonable set of observations in huge power grids. After
solving this problem for each sparse vector 𝑦𝑖 corresponding to
each node 𝑖, we can concatenate all of the sparse vectors
together, form the weighted Laplacian matrix 𝐵, and the process
is completed. Because 𝜃𝑖(𝑡) − 𝜃𝑗(𝑡) = 0 for 𝑖 = 𝑗, 𝑆𝐾𝑖 should
include 𝐾 − 1 nodes; in other words, we should keep the node
𝑖 out of 𝑆𝐾𝑖 since it produces a vector of zeros in the
corresponding column of the matrix 𝐴𝑖. Thus, we cannot
directly calculate the value of the parameter 𝐵𝑖𝑖 from the
recovered vector 𝑦𝑖; however, regarding the aforementioned
definition of the matrix 𝐵,
𝐵𝑖𝑖 = ∑ 𝑏𝑖,𝑗𝑗𝜖𝛮𝑖 . (18)
Thus, after recovering the vector 𝑦𝑖 , 𝐵𝑖𝑖 can be easily calculated.
In the next section, we briefly give a summary of the required
CS and SRP background and concepts used in interpreting and
solving (16) as an SRP.
B. CS Background and Related Concepts
Definition 1 (Sparse Signal): An S-sparse signal 𝑦𝜖𝑅𝐾 is a
signal of length 𝐾 with 𝑆 non-zero entries where 𝑆 < 𝐾 (in
many cases (𝑆 ≪ 𝐾).1
Intuitively, the SRP is an optimization problem in which the
goal is to recover an S-sparse signal 𝑦𝜖𝑅𝐾 from a set of linear
observations (measurements) 𝑝 = 𝐴𝑦 𝜖𝑅𝑀 where 𝐴𝜖𝑅𝑀×𝐾 is
the sensing matrix with 𝑀 < 𝐾 (in many cases 𝑀 << 𝐾).
Typically in CS, the number of measurements 𝑀 will be
proportional to the sparsity level 𝑆 of the signal 𝑦 to be
recovered. For example, it is known that when the sensing
matrix 𝐴 is drawn randomly from a suitable distribution (i.e.,
the measurement protocol is random), with high probability any
𝑆-sparse signal 𝑦 can be recovered from the measurements 𝑝 =𝐴𝑦 if the number of measurements 𝑀 is merely proportional

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
5
𝑆 𝑙𝑜𝑔 (𝐾
𝑆). This number of measurements can be significantly
smaller than the overall signal length 𝐾, and is only greater than
the fundamental limit 𝑆 by a logarithmic factor; one can
interpret this logarithmic factor as the price that should be paid
for not knowing the locations of the sparse coefficients in
advance. Remarkably, assuming the signal 𝑦 to be exactly
sparse and the measurements 𝑝 = 𝐴𝑦 to be noise-free, this
recovery is exact. If the signal to be recovered is nearly sparse
(compressible2) or if the measurements are noisy, this recovery
is provably robust. Compressible signals appear in variety of
applications such as when CS-based techniques are used for
MRI; in many such applications, approximate signal recovery
is sufficient. However, in our work each column of the matrix
𝐵 is exactly sparse. Due to the underdetermined nature of this
recovery problem (i.e., since 𝑀 < 𝐾), the null space of the
sensing matrix 𝐴 is non-trivial; therefore, we have infinitely
many candidate solutions to the system of equations 𝑝 = 𝐴𝑦.
However, under certain conditions on the sensing matrix 𝐴, CS-
based recovery methods can be guaranteed to efficiently find
the candidate solution that is sparse enough. The following
definitions and theorems provide examples of such conditions;
for more discussion and technical proofs and details please refer
to [20]-[22] and references therein.
Definition 2 (Coherence): The coherence of an 𝑀 × 𝐾 matrix
𝐴 with normalized columns 𝑎1, 𝑎2, … , 𝑎𝐾 is defined as follows:
𝜇𝐴 = 𝑚𝑎𝑥1≤𝑚,𝑛≤𝐾,𝑚≠𝑛
|⟨𝑎𝑚, 𝑎𝑛⟩| . (19)
The coherence of an 𝑀 by 𝐾 matrix 𝐴 is a value in the interval
[1
√𝐾, 1].
Definition 3 (Restricted Isometry Property): An 𝑀 by 𝐾
sensing matrix 𝐴 satisfies the Restricted Isometry Property
(RIP) of order 𝑆 if
(1 − 𝛿𝑆)‖𝑦‖22 ≤ ‖𝐴𝑦‖2
2 ≤ (1 + 𝛿𝑆)‖𝑦‖22 (20)
holds for all coefficient vectors 𝑦 with ‖𝑦‖0 ≤ 𝑆 where
𝛿𝑆𝜖(0,1) is known as the isometry constant of order 𝑆.
Theorem 1 (Coherence-based recovery guarantee): Suppose
𝑦 is S-sparse and let 𝑝 = 𝐴𝑦. If
𝜇𝐴 <1
2𝑆−1 , (21)
then �̂� = 𝑦 is the unique solution to 𝑝 = 𝐴�̂� having sparsity 𝑆
or less. The smaller the coherence of 𝐴, the larger the permitted
value of 𝑆, and the broader the class of signals that can be
recovered. Roughly, what these conditions require is that any
two subsets of columns of the sensing matrix 𝐴 must be almost
orthogonal to each other.
Theorem 2 (RIP-based recovery guarantees): Suppose 𝐴
satisfies the RIP of order 2𝑆 with 𝛿2𝑠 < 0.4651. Let 𝑝 = 𝐴𝑦 +𝜂 be noisy measurements of a vector 𝑦. Then for any S-sparse
vector 𝑦, (22) correctly returns �̂� = 𝑦 given 𝑝:
�̂� = 𝑎𝑟𝑔𝑚𝑖𝑛�́�
‖�́�‖1 𝑠𝑢𝑏𝑗𝑒𝑐𝑡 𝑡𝑜 ‖𝑝 − 𝐴�́�‖2 < 휀. (22)
Moreover, for any vector 𝑦, if 휀 ≥ ‖𝜂‖2, then the solution �̂� to
(22) obeys:
2 The nearest 𝑆-sparse signal to 𝑥, 𝑥𝑠, can be obtained simply by keeping the
𝑆 largest entries of 𝑥 and setting all remaining entries to 0. If 𝑥 is exactly 𝑆-
‖𝑦 − �̂�‖2 ≤ 𝐶1‖𝑦−𝑦𝑆‖1
√𝑆+ 𝐶2휀 , (23)
where 𝐶1 and 𝐶2 depend only on the matrix isometry constant.
The vector 𝑦𝑆 is the closest 𝑆-sparse approximation to 𝑦. The
optimization (22) is widely known as Basic Pursuit Denoising
(BPDN) and is an SRP. In the next section, we briefly introduce
several SRP solvers which are used in this work. By
generalizing these methods, we will introduce new adaptable
strategies in order to address the practical challenges involved
in solving the sparse TI problem.
C. Sparse TI Structure and Data Correlation Issues
In general, the standard techniques for solving SRPs can be
categorized into two major groups: greedy algorithms and
algorithms based on convex optimization. In this work we will
use the popular greedy Orthogonal Matching Pursuit (OMP)
algorithm (see Algorithm 1) and the convex optimization
algorithm known as LASSO. The LASSO estimator is defined
as follows:
�̂� = 𝑎𝑟𝑔𝑚𝑖𝑛�́�‖𝑝 − 𝐴�́�‖22 + 𝜆‖�́�‖1 . (24)
This can be viewed as the Lagrangian form of the BPDN
problem (24).
Algorithm 1 Orthogonal Matching Pursuit - OMP require: matrix 𝑨, measurements 𝒑 , stopping criterion
initialize: 𝒓𝟎 = 𝒑, 𝒚𝟎 = 𝟎, 𝒍 = 𝟎, 𝑺𝑼𝑷𝟎 = ∅ repeat
1.match: 𝒉𝒍 = 𝑨𝑻𝒓𝒍 2.identify support indicator:
𝒔𝒖𝒑𝒍 = {𝒂𝒓𝒈𝒎𝒂𝒙𝒋|𝒉𝒍(𝒋)|}
3.update the support:
𝑺𝑼𝑷𝒍+𝟏 = 𝑺𝑼𝑷𝒍 ∪ 𝒔𝒖𝒑𝒍 4.update signal estimate:
𝒚𝒍+𝟏 = 𝒂𝒓𝒈𝒎𝒊𝒏𝒛: 𝒔𝒖𝒑𝒑(𝒛)⊆𝑺𝑼𝑷𝒍+𝟏‖𝒑 − 𝑨𝒛‖𝟐
𝒓𝒍+𝟏 = 𝒑 − 𝑨𝒚𝒍+𝟏
𝒍 = 𝒍 + 𝟏 Until stopping criterion met
output: �̂� = 𝒚𝒍
a. Structured Sparsity
By inspection of the columns of the Laplacian matrices of
standard IEEE test-beds (Fig.1 and Fig.2) we see that the
columns tend to exhibit a clustered sparse structure: the column
vectors not only contain few nonzero elements (i.e., they are
sparse), but the nonzero elements tend to occur in nearly
adjacent positions. In the case of the IEEE Standard-14 Bus or
IEEE Standard-30 Bus, columns 2, 5 and 6 or columns 6 and 10
can be taken as clear examples, respectively. Since in a real PN,
nodes and lines are ordered based on their position in the
network, and commonly the neighbor nodes are connected
through neighbor lines (except in special cases), it is realistic in
practice to assume that nodes have an ordering that lends itself
to clustered sparsity. In one of our recent works [21], we have
used this (17) formulation in addition to reweighted 𝑙1
algorithm to exploit the concentration of the nonzero elements
to the main diagonal besides the clustered structure in the
signal.
sparse, then 𝑥 = 𝑥𝑠. If the distance from 𝑥 to 𝑥𝑠 is small (but not necessarily
zero), 𝑥 is said to be compressible.

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
6
Fig.2. Corresponding Laplacian matrices of the standard IEEE test-beds;
a) IEEE 14 Bus and b) IEEE 30 Bus (Scaled between [-1, 1]).
Definition 4 (Clustered sparsity): We refer to a signal 𝑦 ∈ 𝑅𝐾
as (S;C)-clustered sparse if the total number of nonzero
coefficients is 𝑆 and all nonzero coefficients are distributed
within 𝐶 disjoint clusters (the locations and sizes of the clusters
are arbitrary).
Figure 3 shows the difference between the general structure
of an 𝑆-sparse signal (Fig. 3a) and a clustered-sparse signal
(Fig. 3b).
Modified Clustered OMP
Clustered OMP is a generalized version of the traditional
greedy method OMP. COMP modifies the support
identification step of OMP in order to improve the SRP results
whenever we expect clustered sparsity in the signal to be
recovered [23]. In Section IV, we show how COMP offers
improved recovery of clustered sparse signals. The step-wise
description of COMP (from [23]) is given in Algorithm 2.
Algorithm 2 Clustered Orthogonal Matching Pursuit- COMP require: matrix A, measurements 𝒑 , maximum cluster size m, stopping criterion
initialize: 𝒓𝟎 = 𝒑, 𝒚𝟎 = 𝟎, 𝒍 = 𝟎, 𝑺𝑼𝑷𝟎 = ∅
repeat
1.match: 𝒉𝒍 = 𝑨𝑻𝒓𝒍 2.identify support indicator:
𝒔𝒖𝒑𝒍 = {𝒂𝒓𝒈𝒎𝒂𝒙𝒋|𝒉𝒍(𝒋)|}
3.extend support
𝒔𝒖𝒑 ̂ 𝒍 = {𝒔𝒖𝒑𝒍 − 𝒎 + 𝟏, … , 𝒔𝒖𝒑𝒍, … , 𝒔𝒖𝒑𝒍 + 𝒎 − 𝟏} 4.update the support:
𝑺𝑼𝑷𝒍+𝟏 = 𝑺𝑼𝑷𝒍 ∪ 𝐬𝐮𝐩 ̂ 𝒍 5.update signal estimate:
𝒚𝒍+𝟏 = 𝒂𝒓𝒈𝒎𝒊𝒏𝒛: 𝒔𝒖𝒑𝒑(𝒛)⊆𝑺𝑼𝑷𝒍+𝟏‖𝒑 − 𝑨𝒛‖𝟐
𝒓𝒍+𝟏 = 𝒑 − 𝑨𝒚𝒍+𝟏
𝒍 = 𝒍 + 𝟏 Until stopping criterion met
output: �̂� = 𝒚𝒍
In order to improve the handling of border effects, we make a
slight modification to Step 3 of COMP as follows:
3.1. finding the boundaries of the support
Upper Bound = 𝒎𝒊𝒏((𝒔𝒖𝒑𝒍 + 𝒎 − 𝟏), 𝟏))
Lower bound = 𝒎𝒂𝒙(𝒔𝒖𝒑𝒍 − 𝒎 + 𝟏), 𝑵)
3.2. modified extend support:
𝒔𝒖𝒑𝒍 = {𝑳𝒐𝒘𝒆𝒓 𝒃𝒐𝒖𝒏𝒅 , … , 𝒔𝒖𝒑𝒍, … , 𝑼𝒑𝒑𝒆𝒓 𝑩𝒐𝒖𝒏𝒅 }
We call the resulting algorithm Modified COMP (MCOMP).
b. Data Correlation Issue
Even though graph data analytics are essential for gaining
insight into big networks, large-scale interconnected network
processing is complex because of its graph-specific challenges,
including complicated correlations among data entities, highly
skewed distributions, and so on. Considering large-scale
interconnected power networks, the possible correlation among
the recorded data from the nodes (especially from neighboring
nodes) is an issue in sparse TI since it may result in highly
coherent sensing matrices 𝐴. As noted in Theorem 1, high
coherence can have an undesirable effect on the performance of
SRP solvers. Recently, two new techniques named Band–
exclusion (B) and Local Optimization (LO) have been
developed in [25] in order to help address the high coherence
issue in sparse signal recovery. The BLO technique known as
BLOOMP can be interpreted as adding an additional constraint
on the support selection step in OMP to prevent the algorithm
from picking highly correlated indexes in the estimated support
of the sparse signal [25]. Within this algorithm a new concept
termed the coherence band is defined. The coherence band (𝑐𝑏)
and related concepts are defined as follows: for some tolerance
𝛼 ≥ 0,
𝐵𝛼(𝜆) = {𝑖| |⟨𝑎𝑖, 𝑎𝜆⟩| > 𝛼} (25)
𝐵𝛼(𝛬) =∪𝜆𝜖𝛬 𝐵𝛼(𝜆) (26)
𝐵𝛼(2)(𝜆) = 𝐵𝛼(𝐵𝛼(𝜆)) =∪𝑗𝜖𝐵𝛼(𝜆) 𝐵𝛼(𝑗) (27)
𝐵𝛼(2)(𝛬) = 𝐵𝛼(𝐵𝛼(𝛬)) =∪𝜆𝜖𝛬 𝐵𝛼
(2)(𝜆). (28)
However, there is an issue with applying such a method in the
sparse TI problem. Due to nature of this method, whenever the
correlation between two columns of the sensing matrix is high
one of the corresponding positions will not be selected within
the true support. On the other side, as it has been mentioned
before, in TI the positions of the nonzero elements of a signal
vector are typically clustered. Since correlation in a sensing
matrix tends to be highest for columns corresponding to
neighboring nodes, this means that applying the BLOOMP
method may cause us to miss some nonzero elements of the
signal vector. In order to deal with this problem, we suggest an
algorithm composed of BLOOMP and MCOMP that we refer
to as BLOMCOMP (Algorithm 3); this algorithm adds the pre-
knowledge of clustered sparsity to BLOOMP. This
modification prevents us from losing nonzero neighbor
elements within a cluster. In addition to band-exclusion, LO is
used in BLOMCOMP as a residual-reduction technique (for
more information please refer to [25]).
Algorithm 3 Band-excluded Locally Optimized MCOMP
(BLOMCOMP) require: matrix 𝑨 , measurements 𝒑 , Coherence band 𝜶 > 𝟎 , maximum
cluster size 𝒎, stopping criterion
initialize: 𝒓𝟎 = 𝒑, 𝒚𝟎 = 𝟎, 𝒍 = 𝟎, 𝑺𝑼𝑷𝟎 = ∅
repeat
1.match: 𝒉𝒍 = 𝑨𝑻𝒓𝒍 2.identify support indicator:
𝒔𝒖𝒑𝒍 = {𝒂𝒓𝒈𝒎𝒂𝒙𝒋|𝒉𝒍(𝒋)|} , 𝒋 ∉ 𝑩𝜶
(𝟐)(𝑺𝑼𝑷𝒍−𝟏)
3.update the support:
Upper Bound = 𝒎𝒊𝒏((𝒔𝒖𝒑𝒍 + 𝒎 − 𝟏), 𝟏))
Lower bound = 𝒎𝒂𝒙(𝒔𝒖𝒑𝒍 − 𝒎 + 𝟏), 𝑲)
𝒔𝒖𝒑 ̂ 𝒍 = {𝑳𝒐𝒘𝒆𝒓 𝒃𝒐𝒖𝒏𝒅 , … , 𝒔𝒖𝒑𝒍, … , 𝑼𝒑𝒑𝒆𝒓 𝑩𝒐𝒖𝒏𝒅 } 𝑺𝑼𝑷𝒍+𝟏 = 𝑳𝑶(𝑺𝑼𝑷𝒍 ∪ {𝒔𝒖𝒑 ̂ 𝒍}) 4.update signal estimate:
𝒚𝒍+𝟏 = 𝒂𝒓𝒈𝒎𝒊𝒏𝒛: 𝒔𝒖𝒑𝒑(𝒛)⊆𝑺𝑼𝑷𝒍+𝟏‖𝒑 − 𝑨𝒛‖𝟐
𝒓𝒍+𝟏 = 𝒑 − 𝑨𝒚𝒍+𝟏
𝒍 = 𝒍 + 𝟏 Until stopping criterion met
output: �̂� = 𝒚𝒍
(b) (a)
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
7
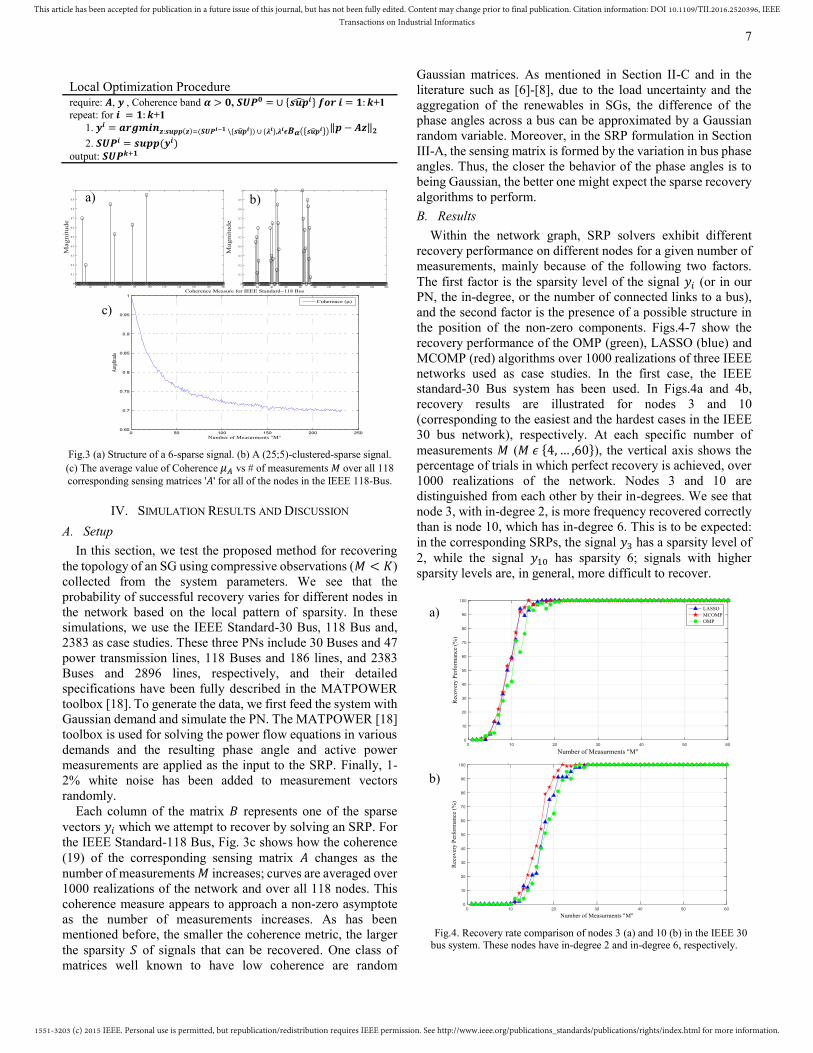
Local Optimization Procedure require: 𝑨, 𝒚 , Coherence band 𝜶 > 𝟎, 𝑺𝑼𝑷𝟎 = ∪ {𝒔𝒖𝒑 ̂ 𝒊} 𝒇𝒐𝒓 𝒊 = 𝟏: 𝒌+1
repeat: for 𝒊 = 𝟏: 𝒌+1
1. 𝒚𝒊 = 𝒂𝒓𝒈𝒎𝒊𝒏𝒛:𝒔𝒖𝒑𝒑(𝒛)=(𝑺𝑼𝑷𝒊−𝟏 \{𝒔𝒖𝒑 ̂ 𝒊}) ∪ {𝝀𝒊},𝝀𝒊𝝐𝑩𝜶({𝒔𝒖𝒑 ̂ 𝒊})‖𝒑 − 𝑨𝒛‖𝟐
2. 𝑺𝑼𝑷𝒊 = 𝒔𝒖𝒑𝒑(𝒚𝒊)
output: 𝑺𝑼𝑷𝒌+𝟏
Fig.3 (a) Structure of a 6-sparse signal. (b) A (25;5)-clustered-sparse signal.
(c) The average value of Coherence 𝜇𝐴 vs # of measurements 𝑀 over all 118
corresponding sensing matrices '𝐴' for all of the nodes in the IEEE 118-Bus.
IV. SIMULATION RESULTS AND DISCUSSION
A. Setup
In this section, we test the proposed method for recovering
the topology of an SG using compressive observations (𝑀 < 𝐾)
collected from the system parameters. We see that the
probability of successful recovery varies for different nodes in
the network based on the local pattern of sparsity. In these
simulations, we use the IEEE Standard-30 Bus, 118 Bus and,
2383 as case studies. These three PNs include 30 Buses and 47
power transmission lines, 118 Buses and 186 lines, and 2383
Buses and 2896 lines, respectively, and their detailed
specifications have been fully described in the MATPOWER
toolbox [18]. To generate the data, we first feed the system with
Gaussian demand and simulate the PN. The MATPOWER [18]
toolbox is used for solving the power flow equations in various
demands and the resulting phase angle and active power
measurements are applied as the input to the SRP. Finally, 1-
2% white noise has been added to measurement vectors
randomly.
Each column of the matrix 𝐵 represents one of the sparse
vectors 𝑦𝑖 which we attempt to recover by solving an SRP. For
the IEEE Standard-118 Bus, Fig. 3c shows how the coherence
(19) of the corresponding sensing matrix 𝐴 changes as the
number of measurements 𝑀 increases; curves are averaged over
1000 realizations of the network and over all 118 nodes. This
coherence measure appears to approach a non-zero asymptote
as the number of measurements increases. As has been
mentioned before, the smaller the coherence metric, the larger
the sparsity 𝑆 of signals that can be recovered. One class of
matrices well known to have low coherence are random
Gaussian matrices. As mentioned in Section II-C and in the
literature such as [6]-[8], due to the load uncertainty and the
aggregation of the renewables in SGs, the difference of the
phase angles across a bus can be approximated by a Gaussian
random variable. Moreover, in the SRP formulation in Section
III-A, the sensing matrix is formed by the variation in bus phase
angles. Thus, the closer the behavior of the phase angles is to
being Gaussian, the better one might expect the sparse recovery
algorithms to perform.
B. Results
Within the network graph, SRP solvers exhibit different
recovery performance on different nodes for a given number of
measurements, mainly because of the following two factors.
The first factor is the sparsity level of the signal 𝑦𝑖 (or in our
PN, the in-degree, or the number of connected links to a bus),
and the second factor is the presence of a possible structure in
the position of the non-zero components. Figs.4-7 show the
recovery performance of the OMP (green), LASSO (blue) and
MCOMP (red) algorithms over 1000 realizations of three IEEE
networks used as case studies. In the first case, the IEEE
standard-30 Bus system has been used. In Figs.4a and 4b,
recovery results are illustrated for nodes 3 and 10
(corresponding to the easiest and the hardest cases in the IEEE
30 bus network), respectively. At each specific number of
measurements 𝑀 (𝑀 𝜖 {4, … ,60}), the vertical axis shows the
percentage of trials in which perfect recovery is achieved, over
1000 realizations of the network. Nodes 3 and 10 are
distinguished from each other by their in-degrees. We see that
node 3, with in-degree 2, is more frequency recovered correctly
than is node 10, which has in-degree 6. This is to be expected:
in the corresponding SRPs, the signal 𝑦3 has a sparsity level of
2, while the signal 𝑦10 has sparsity 6; signals with higher
sparsity levels are, in general, more difficult to recover.
Fig.4. Recovery rate comparison of nodes 3 (a) and 10 (b) in the IEEE 30 bus system. These nodes have in-degree 2 and in-degree 6, respectively.
a)
c)
b)
a) b)

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
8
Another important factor, which affects the SRP solver’s
performance, is the existence of a possible clustered structure
in the sparse signals to be recovered. As we have mentioned,
MCOMP is an extended version of OMP, which has been
adapted to exploit the knowledge that the non-zero entries of
the signal appear in clusters. The structured sparsity in the
columns of the matrix 𝐵 can be used to improve the recovery
performance. Figs.4a and 4b show how the presence of
clustered sparsity helps the MCOMP algorithm to outperform
the LASSO and OMP, especially in the case of node 10, where
𝑦10 is a (6, 4)-clustered sparse signal and the in-degree of the
node (or the number of nonzero elements of the signal to be
recovered) is larger.
Fig.5. Recovery rate comparison of nodes 74, 59, and 49 in the IEEE 118-Bus,
with in-degree 2, 5, and 9 respectively.
In order to compare the performance over more complicated
cases, the IEEE Standard-118 Bus and 2383 Bus systems have
also been used for modeling the PN. In the IEEE 118 bus, we
focus on recovering the connections to nodes 74 (which has in-
degree 2), 49 (in-degree 9), and 59 (in-degree 6). In the IEEE
2383 bus, we focus on nodes 3 (in-degree 3) and 1920 (in-
degree 9). From the sparsity level viewpoint, 𝑦49 and 𝑦1920
correspond to the most complicated signals 𝑦𝑖 to be recovered
in the two networks, respectively. Recovery results are again
shown over 1000 realizations of the corresponding network.
Figs.5a-c show the recovery results for the IEEE 118 Bus
network. As might be expected, we see that node 74 (with in-
degree 2) is more likely to be recovered from a given number
of measurements than is node 59 (in-degree 6). Node 49 (with
in-degree 9) is the most difficult to recover. These plots also
show how MCOMP outperforms LASSO and OMP in the case
of node 49, where 𝑦49 is a (9, 5)-clustered sparse signal and the
in-degree of the node (or the number of nonzero elements of the
signal to be recovered) is larger. On node 59 (where the
corresponding signal 𝑦59 is a (6, 3)-clustered sparse signal)
MCOMP again outperforms OMP and LASSO. On node 74
(where 𝑦74 has no clustered sparsity), LASSO is the best
performing algorithm.
Moreover, Fig.6.a and b are representing the recovery
performance of each of 3 SRP solvers for 3-sparse node 3 and
9-sparse node 1920 in IEEE 2383 Bus network. Due to the
larger scale of this network, we generally need more
measurements to achieve the perfect recovery for any
individual node compared to smaller networks like the IEEE
118 Bus. As it has been mentioned before, the number of
measurements needed for full recovery depends on both the
sparsity level and the original dimension of the signal 𝑦 (here,
the dimension 𝐾 equals the number of buses in our sparse TI
problem); specifically, 𝑀 must be at least proportional to
𝑆 𝑙𝑜𝑔(𝐾/𝑆). As a rough rule of thumb, in many applications,
when the sensing matrix has low coherence, one observes
perfect recovery when 𝑀 ≈ 4𝑆. However, as the dimension 𝐾
grows, it becomes necessary to take more measurements. For
example, in the case of the IEEE 118 Bus, node 49 has in-degree
9, and perfect recovery is possible when 𝑀 ≈ 50. In the case of
the IEEE 2383 network, node 1920 again has in-degree 9, but
perfect recovery is not possible until 𝑀 ≈ 80.
Fig.6. Recovery rate comparison of nodes 3 and 1920 in the IEEE standard 2383 network. Nodes 3 and 1920 have in-degree 3 and 9, respectively.
b)
a)
OMP
a)
b)
c)
1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
9
Comparing the results from different size networks it is clear
that number of measurements required for perfect recovery is
affected less by the network size than by the sparsity level of
the corresponding signal 𝑦𝑖 to be recovered. Taking fewer
measurements reduces the recovery performance of any SRP
solver; however, the LASSO and MCOMP generally show
better recovery performance than OMP. Moreover, we cannot
recover the nodes with higher in-degrees (such as node 49,
where 𝑦49 is a (9, 5)-clustered sparse signal) until 𝑀 is large
enough that the PN coherence metric reaches a suitably small
level, and if such a level were never to be reached, we might be
limited in the degree of nodes that we could recover with these
techniques.
Finally, in order to highlight the effect of the data correlation
issue in addition to the impact of clustered sparsity, we have
examined the recovery results for two other clustered sparse
signals in the IEEE 118 bus: signal 𝑦37 which is a (6, 2)-
clustered sparse signal, and signal 𝑦80 which is an (8, 4)-
clustered sparse signal. In general, as one should expect 𝑦37 to
be easier to recover compared to 𝑦80. In order to evaluate the
results we define the interconnection order (𝐼𝑂) for node 𝑖 as
follows:
𝐼𝑂(𝑖) = ∑ 𝑖𝑛 − 𝑑𝑒𝑔𝑟𝑒𝑒(𝑗)𝑗𝜖𝛮𝑖 (29)
Node 37 has 6 direct neighbors and 𝐼𝑂(37) = 17; node 80
has 8 direct neighbors and 𝐼𝑂(80) = 22. The interconnection
order can be interpreted as a factor that can reflect the level of
data correlation within a specific bus versus the rest of the
network; however, it will not be the only factor. Fig.7 illustrates
how BLOMCOMP outperforms MCOMP, OMP and LASSO
in the case of node 80, where we face a more complicated and
interconnected local topology and a higher coherence in the
corresponding sensing matrix.
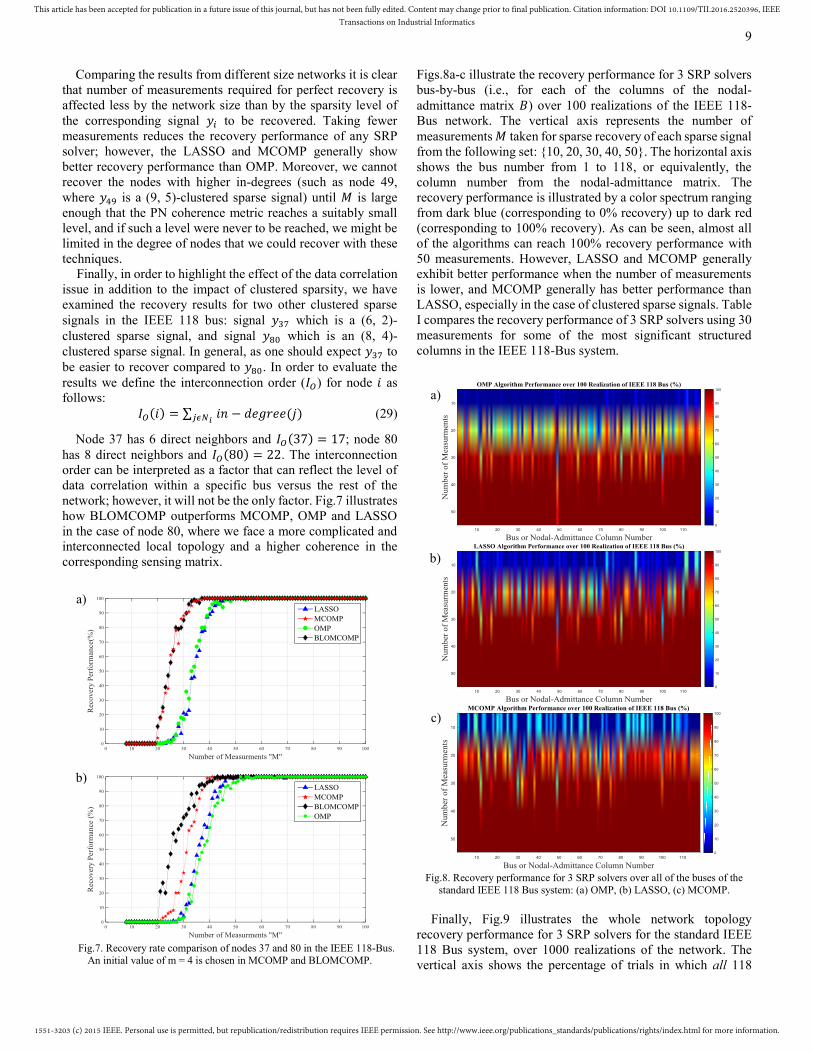
Fig.7. Recovery rate comparison of nodes 37 and 80 in the IEEE 118-Bus.
An initial value of m = 4 is chosen in MCOMP and BLOMCOMP.
Figs.8a-c illustrate the recovery performance for 3 SRP solvers
bus-by-bus (i.e., for each of the columns of the nodal-
admittance matrix 𝐵) over 100 realizations of the IEEE 118-
Bus network. The vertical axis represents the number of
measurements 𝑀 taken for sparse recovery of each sparse signal
from the following set: {10, 20, 30, 40, 50}. The horizontal axis
shows the bus number from 1 to 118, or equivalently, the
column number from the nodal-admittance matrix. The
recovery performance is illustrated by a color spectrum ranging
from dark blue (corresponding to 0% recovery) up to dark red
(corresponding to 100% recovery). As can be seen, almost all
of the algorithms can reach 100% recovery performance with
50 measurements. However, LASSO and MCOMP generally
exhibit better performance when the number of measurements
is lower, and MCOMP generally has better performance than
LASSO, especially in the case of clustered sparse signals. Table
I compares the recovery performance of 3 SRP solvers using 30
measurements for some of the most significant structured
columns in the IEEE 118-Bus system.
Fig.8. Recovery performance for 3 SRP solvers over all of the buses of the
standard IEEE 118 Bus system: (a) OMP, (b) LASSO, (c) MCOMP.
Finally, Fig.9 illustrates the whole network topology
recovery performance for 3 SRP solvers for the standard IEEE
118 Bus system, over 1000 realizations of the network. The
vertical axis shows the percentage of trials in which all 118
b)
c)
a)
a)
b)

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
10
columns of the nodal-admittance matrix 𝐵 (and, as a result, the
whole network topology) are perfectly recovered. This figure
also shows that the whole network topology can typically be
recovered from 50 or fewer measurements per bus.
Table. I. Recovery performance of 3 SRP solvers using 30 measurements for
the most significant clustered sparse buses in the IEEE 118-Bus system.
Bus (Column) # OMP (%) LASSO (%) MCOMP (%)
5 90 91 100
11 92 100 98
12 52 54 51
15 85 93 100
17 74 71 88
56 89 92 100
62 92 99 99
85 74 92 99
100 31 32 78
105 90 90 100
Fig.9. Whole network topology recovery performance for 3 SRP solvers
for the standard IEEE 118 Bus system over 1000 realizations of the network.
V. CONCLUSIONS
In this study, we explore the topology identification problem
for smart grids. The DC power flow model, graph theory, and
sparse recovery techniques from compressive sensing are
composed in order to address the following challenges in
topology identification and line outage localization of
transmission lines: 1) the computational complexity of data
collection and analysis procedures in large scale SGs; 2) the
effect of distributed generation systems such as wind turbines
or PV cells; and 3) the uncertainty of system states and
parameters caused by the nonlinear and stochastic behavior of
loads. The proposed method models the SG as an
interconnected graph. Next, using an approximated version of
the AC power-flow model (a DC model) under the probabilistic
power flow regime, the TI problem is mathematically
formulated as an optimization problem.
Finally, due to the sparse nature of this optimization problem
the TI can be interpreted as an SRP, which can efficiently be
solved using SRP solvers such as greedy (OMP, MCOMP) or
optimization based (LASSO) algorithms. We have discussed
important concepts from CS such as coherence and its behavior
in a sparse representation of the TI problem for IEEE standard
networks. Network models have been generated using the
MATPOWER toolbox and standard IEEE test-beds. The main
advantage of the presented method is that this sparse
reformulation of the TI problem relies only on the
measurements from the system parameters and does not need
any a priori information about the topology of the network. In
fact, in our technique, the output of the SRP solver methods is
the structure or topology matrix of the network itself. Case
studies using standard IEEE standard test-beds have shown that
the proposed method represents a promising new strategy for
topology identification, fault detection, and monitoring using
only a small set of observations from some of the bus
parameters. This paper shows that the recovery performance of
the SRP solvers is mainly dependent on the in-degree (number
of lines connected) of each bus in the network. Moreover, the
sparse signals to be recovered often exhibit a clustered-sparse
structure, so it is possible to improve the recovery results using
SRP solvers that encourage structured sparsity. We have also
addressed the problem of correlation in the sensing matrix
among columns that are likely to belong to the signal support.
REFERENCES
[1] X.Y.Yu, C. Cecati, T. Dillon, and M. G. Simões, “The new frontier of
smart grids,” IEEE Ind. Electron. Mag., vol. 5, no. 3, pp. 49–63, Sep.
2011.
[2] V. Gungor, D. Sahin, T. Kocak, S. Ergut, C. Buccella, C. Cecati, and G.
Hancke, Smart Grid Technologies Communications Technologies and Standards” IEEE Transactions on Industrial Informatics, vol.7, no. 4, pp.
529-539, Sept. 2011.
[3] Weilin Li, Mohsen Ferdowsi, Marija Stevic, Antonello Monti, and Ferdinanda Ponci, “Cosimulation for Smart Grid Communications”,
IEEE Transactions on Industrial Informatics, vol. 10, no. 4, Nov 2014. [4] X. Fang, S. Misra, G. Xue, and D. Yang, “Smart grid-The new and
improved power grid: A survey,” IEEE Commun. Surveys Tutorials, vol.
14, no. 4, pp. 944–980, Fourth Quarter 2012. [5] Harirchi, Farnaz; Simoes, M.Godoy, Al Durra, Ahmed and Muyeen, S.M.
"Short transient recovery of low voltage-grid-tied DC distributed
generation". ECCE, 2015 IEEE, pp 1149-1155, Montreal, QC, Canada, Sept. 2015.
[6] H. Sedghi, E Jonckheere. Information and Control in Networks. In
Giacomo Como, Bo Bernhardsson, Anders Rantzer, editors, Lecture Notes in Control and Information Sciences, vol. 450, 2014, Springer
Cham Heidelberg New York Dordrecht London, Ch. 9, pp 277-297.
[7] M. He and J. Zhang. “A dependency graph approach for fault detection and localization towards secure smart grid”. IEEE Transactions on Smart
Grid, no. 2, pp. 342–351, June 2011.
[8] A. Schellenberg, W. Rosehart, and J. Aguado, “Cumulant-based probabilistic optimal power flow (P-OPF) with Gaussian and Gamma
distributions,”IEEE Trans. on Power Systems, vol. 20, pp. 773–781, May
2005. [9] V. Kekatos, G. B. Giannakis, and R. Baldick, “Grid topology
identification using electricity prices,” in Proc. IEEE Power & Energy
Society General Meeting, National Harbor, MD, Jul. 2014. [10] H. Zhu and G. B. Giannakis, “Sparse Overcomplete Representations for
Efficient Identification of Power Line Outages” IEEE Trans. on Power
Systems, vol. 23, pp. 1644-1652, Oct. 2012. [11] J.C. Chen, W.T Li, C.K. Wen, J.H. Teng, P. Ting. “Efficient identification
method for power line outages in the smart power grid”. IEEE Trans.
Power Systems, vol. 29, pp. 1788–1800, 2014. [12] Zhao and W.-Z. Song, “Distributed power-line outage detection based on
wide area measurement system,” Sensors, vol. 14, no. 7, pp. 13 114–13
133, Jan. 2014. [13] J. Wu, J. Xiong, and Y. Shi, “Efficient location identification of multiple
line outages with limited PMUs in smart grids,” IEEE Trans. Power Syst.,
vol. 30, no. 4, pp. 1659-1668, Jul 2015. [14] Wen-Tai Li, Chao-Kai Wen, Jung-Chieh Chen, Kai-Kit Wong, Jen-Hao
Teng, and Chau Yuen. “Location Identification of Power Line Outages
Using PMU Measurements with Bad Data”. arXiv:1502.05789v1 [cs.SY] 20 Feb 2015.
[15] M. Majidi, A. Arabali, and M. Etezadi-Amoli, “Fault location in
distribution networks by compressive sensing,” IEEE Trans. on Power Delivery. vol.30, no,4,pp 1761-1769, Aug 2015.
[16] Guangyu Feng, and Ali Abur. “Fault Location Using Wide-Area
Measurements and Sparse Estimation”. IEEE Trans. on Power Systems Accepted and to be published, 2016.
[17] D. B. West, Introduction to Graph Theory, 2nd ed., Prentice Hall, 2001.

1551-3203 (c) 2015 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TII.2016.2520396, IEEETransactions on Industrial Informatics
11
[18] R. D. Zimmerman, C. E. Murillo-Sanchez, and R. J. Thomas, “Steady-
state operations, planning and analysis tools for power systems research and education,” IEEE Trans. on Power Systems, vol. 26, no. 1, pp. 12–19,
Feb. 2011.
[19] A. J. Wood and B. F. Wollenberg, Power Generation, Operation, and Control, 2nd ed. New York: Wiley, 1996.
[20] E.J. Candes and M.B. Wakin, “An introduction to compressive sam-
`pling”, IEEE Signal Processing Magazine, vol. 24, pp. 21–30, Mar 2008. [21] M Babakmehr, MG Simoes, MB Wakin, A Durra, F Harirchi. "Smart grid
topology identification using sparse recovery". Presented in Industry
Applications Society Annual Meeting, Oct 2015, to be reviewed in IEEE Trans of Industrial Applications.
[22] M. B. Wakin. Compressive Sensing Fundamentals. In M. Amin, editor,
Compressive Sensing for Urban Radar, pp. 1-47. CRC Press, Boca Raton, Florida, 2014.
[23] B.M. Sanandaji, T.L. Vincent, and M.B. Wakin. “Compressive Topology
Identification of Interconnected Dynamic Systems via Clustered Orthogonal Matching Pursuit”, in Proceedings of the 50th IEEE CDC-
ECC 2011, Orlando, Florida, USA, Dec. 2011, pp. 174–180.
[24] M. Babakmehr, M.G. Simões, A. Al Durra, F. Harirchi and Qi. Han. “Application of Compressive Sensing for Distributed and Structured
Power Line Outage Detection in Smart Grids”, IEEE, ACC 2015, pp
3682-3689, Chicago, Illinois, USA, July 2015. [25] A. Fannjiang, W. Liao. "Coherence Pattern–Guided Compressive Sensing
with Unresolved Grids". SIAM J. IMAGING SCIENCES, vol. 5, no. 1, pp.
179–202, 2012. [26] Debomita Ghosh, T. Ghose, and D. K. Mohanta. “Communication
Feasibility Analysis for Smart Grid with Phasor Measurement Units”. IEEE Transactions on Industrial Informatics, vol. 9, no. 3, pp 1486-1496,
Aug 2013.
[27] Ayman I. Sabbah, Student Member, IEEE, Amr El-Mougy, and Mohamed Ibnkahla, A Survey of Networking Challenges and Routing Protocols in
Smart Grids, IEEE Transactions on Industrial Informatics, vol. 10, no. 1,
pp 210-221, Feb 2014. [28] David M. Laverty, Robert J. Best, Paul Brogan, Iyad Al Khatib, Luigi
Vanfretti, and D. John Morrow, “The OpenPMU Platform for Open-
Source Phasor Measurements” IEEE Transactions on Instrumentation and measurements, vol. 62, no. 4, Apr 2013.
[29] Sadegh Azizi, and Majid Sanaye-Pasand. “A Straightforward Method for
Wide-Area Fault Location on Transmission Networks” IEEE Transactions of Power Delivery, vol. 30, no. 1, pp 264-272, Feb 2015.
[30] Yu Christine Chen, Taposh Banerjee, Alejandro D. Domínguez-García,
and Venugopal V. Veeravalli. "Quickest Line Outage Detection and Identification". IEEE Transactions of Power Systems, vol. 31, no. 1, pp
749-758, Jan 2016.
[31] Qingqing Huang, Leilai Shao and Na Li. “Dynamic detection of transmission line outages using Hidden Markov Models”, IEEE, ACC
2015, pp 5050 – 5055, Chicago, Illinois, USA, July 2015.
[32] Xian-Ming Zhang, Qing-Long Han, and Xinghuo Yu. “Survey on Recent Advances in Networked Control Systems”, DOI:
10.1109/TII.2015.2506545, IEEE Transactions on Industrial Informatics.
[33] Francisco J. Rodriguez, Susel Fernandez, Ines Sanz, Miguel Moranchel, and Emilio J. Bueno. “Distributed Approach for SmartGrids
Reconfiguration based on the OSPF routing protocol”. DOI:
10.1109/TII.2015.2496202, IEEE Transactions on Industrial Informatics. [34] FJunbo Zhang, C.Y. Chung, Zejing Wang, and Xiangtian Zheng.
“Instantaneous Electromechanical Dynamics Monitoring in Smart
Transmission Grid”. DOI 10.1109/TII.2015.2492861, IEEE Transactions
on Industrial Informatics.
Mohammad Babakmehr (S’14) received the B.S.
degree in electrical engineering in 2008 from Central
Tehran University and the M.Sc. degree in Biomedical-Bioelectric engineering in 2011 from
the Amirkabir University of Technology, Tehran,
Iran. He is currently a Ph.D. degree candidate in the
Department of Electrical Engineering and Computer
Science, Colorado School of Mines (CSM), Golden. He has been with the Center for the Advanced
Control of Energy and Power Systems since 2013. His research interests include
smart grid technologies, compressive sensing, advance signal processing and control theory.
Marcelo G. Simões (S’89–M’95–SM’98-F’15)
received the B.S. and M.S. degrees from the University of São Paulo, Brazil, in 1985 and 1990,
the Ph.D. degree from The University of Tennessee,
Knoxville in 1995, and the D.Sc. degree (Livre- ocência) from the University of São Paulo in 1998.
He is an IEEE fellow and Associate Professor with
the Colorado School of Mines (CSM), Golden, where he has been establishing research and
education activities in the development of intelligent
control for high-power electronics applications in renewable and distributed energy systems, and where he currently serves as the
Director of the Center for the Advanced Control of Energy and Power Systems.
He has been involved in activities related to the control and management of smartgrid applications since joining CSM. In 2002, he received an NSF
CAREER Award “Intelligent-Based Performance Enhancement Control of
Micropower Energy Systems.” Currently, he is the Chair for the IEEE IES Smart Grid Committee.
Miachael B. Wakin (S’01–M’06–SM’13) Michael
B. Wakin is the Ben L. Fryrear Associate Professor in
the Department of Electrical Engineering and Computer Science at the Colorado School of Mines
(CSM). Dr. Wakin received a Ph.D. in electrical
engineering in 2007 from Rice University. He was an NSF Mathematical Sciences Postdoctoral Research
Fellow at Caltech from 2006-2007 and an Assistant Professor at the University of Michigan from 2007-
2008. His research interests include sparse,
geometric, and manifold-based models for signal processing and compressive sensing.
In 2007, Dr. Wakin shared the Hershel M. Rich Invention Award from Rice
University for the design of a single-pixel camera based on compressive sensing; in 2012, Dr. Wakin received the NSF CAREER Award for research
into dimensionality reduction techniques for structured data sets; and in 2014,
Dr. Wakin received the Excellence in Research Award for his research as a junior faculty member at CSM.
Farnaz Harirchi (S’14) received the B.S. degree in
electrical engineering in 2008 from Central Tehran University and the M.Sc. degree in Electrial and
Electronic engineering in 2011 from the Iran
University of Science and Technology, Tehran, Iran. She is currently a Ph.D. degree candidate in the
Department of Electrical Engineering and Computer
Science, Colorado School of Mines (CSM), Golden. She has been with the Center for the Advanced
Control of Energy and Power Systems since 2012.
Her research interests include renewable energy aggregation, smart Microgrids, power electronics and, intelligent control for high-power electronics
applications.





























