Embed Size (px)
Citation preview
793
커플링
모터
14커플링
모터
14
794
커플링
모터
14커플링
모터
14
Q모터 선정 예
●요구 사양 용도: 컨베이어 구동 운전 상황: 연속 전압: 100V 주파수: 60Hz 회전 속도: 25r/min
1모터 기종 선정 용도·운전 상황·사용 환경·전압을 바탕으로 상기 기종 선정표에서 인덕션 모터 단상 리드선 타입(PACMS)을 선정합니다.
2감속비의 임시 결정 희망 회전 속도 25r/min에서 모터의 정격 회전 속도(60Hz 지역)가 1500~1550r/min이 되는 감속비는 1500÷25~1550÷25=60~62이므로
감속비 60을 사용하는 것으로 임시 결정합니다.
3필요 토크 산출 개략 부하를 용수철 저울(Spring balancer)로 측정합니다. (예: 2.65N·m이라고 가정합니다) P.796의 「기어 헤드 장착 시의 허용 토크」의 감속비 60의 허용 토크를 참조한 후 여유를 2배 정도 고려해서 출력 25W의 모터(PACMS80-W25-V100), 감속비 60의 기어 헤드(PACMGX80-60)를 선정합니다.
4실측을 통한 모터의 확인 컨베이어는 일반적으로 움직이기 시작할 때에 가장 큰 토크가 필요합니다. 따라서 시동 시에 필요한 토크를 최저 시동 전압의 실측(✽)의 결과로 계산해서 하기 항목을 확인합니다. a. 모터의 시동 토크>필요 토크(=최저 시동 토크) b. 실측 회전 속도>정격 회전 속도
(예: 실측 결과가 최저 시동 전압 75V, 회전 속도 1700r/min이라고 가정합니다.) a. 토크에 대해서 P.796에서 PACMS80-W25-V100의 시동 토크=0.16N·m 최저 시동 토크=시동 토크×(최저 시동 전압/정격 전압)2=0.16×(75/100)2=0.09N·m PACMS80-W25-V100의 시동 토크(0.16N·m)>최저 시동 토크(0.09N·m)
b. 회전 속도에 대해서 P.796에서 PACMS80-W25-V100의 정격 회전 속도=1550r/min 실측 회전 속도(1700r/min)>정격 회전 속도(1550r/min)
이상의 결과로 토크·회전 속도에 대해서는 PACMS80-W25-V100를 사용해도 문제가 없는 것을 알 수 있습니다.
✽최저 시동 전압의 실측 방법 모터와 측정하는 부하를 연결해서 슬라이덕(autotransformer)과 전압계를 접속합니다. 이 슬라이덕으로 모터로의 인가 전압을 천천히 상승시켜 기기의 회전부가 시동했을 때의 전압을 측정합니다.
COMPACT AC GEARED MOTORS -GUIDE-
소형 기어드 모터 개요
Q모터의 선정
1. 구동 기구부의 결정
구동 기구나 개략 치수를 결정해서 구동에 필요한 반송물의 질량이나 이동 속도 등의 조건을 결정합니다.2. 회전 속도·부하 계산
부하 토크, 부하 관성 모멘트, 회전 속도 등에 관해서 모터 구동축에서의 각 값을 계산합니다.3. 요구 사양의 확인
구동부 및 기기의 요구 사양·정지 정밀도·위치 유지·속도 범위·사용 환경·내환경성 등을 확인합니다.4. 모터 기종 선정
요구 사양에 대하여 최적의 기종을 선택합니다.5. 모터 및 기어 헤드의 임시 결정
계산 등으로 구한 모터축의 회전 속도·부하 토크·부하 관성 모멘트의 값과 선택한 모터 기종에서 구체적인 모터 및 기어 헤드를 임시 선정합니다.6. 선정 모터의 확인
기계적 강도나 가속 시간, 가속 토크 등에서 모터 및 기어 헤드의 사양이 모든 요구 사양을 충족시키고 있는지 확인하고 최종적으로 모터를 결정합니다.
Q기종 선정표
기종
인덕션 모터 리버시블 모터 가변속 타입 유닛 모터 전자 브레이크 장착 모터(단상) 전자 브레이크 장착 모터(3상)
PACMS•PACMT PACMR PACMV-U PACMB PACMTB
WP.795 WP.799 WP.801
특징 한 방향 연속 운전에 적합한 모터 순간 정/역 운전이 가능한 모터스피트 컨트롤러와 병용하여
무단 변속이 가능한 모터무여자 작동형인 전자 브레이크를 내장해서 강한 제동력과 부하의 유지력을 가진 모터
전압단상 100V·200V 3상 200V·220V
단상 100V·200V 단상 100V·200V 단상 100V·200V 3상 200V·220V
연속 운전 ○ × ○ × ○순간 정역 운전 × ○ × ○ ×
가변속 × × ○ × ×부하 유지 × × × ○ ○
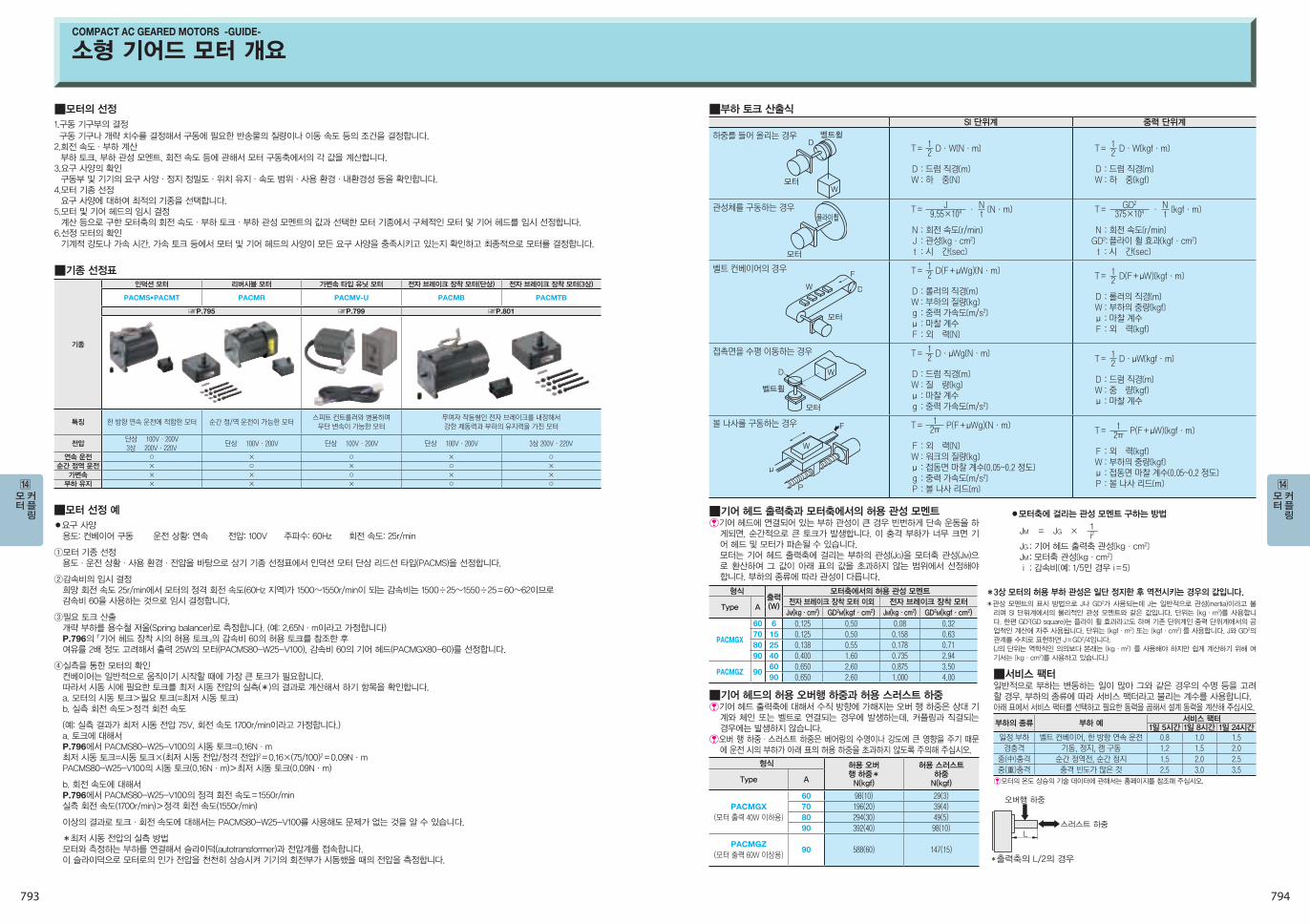
Q부하 토크 산출식
Q기어 헤드 출력축과 모터축에서의 허용 관성 모멘트E 기어 헤드에 연결되어 있는 부하 관성이 큰 경우 빈번하게 단속 운동을 하
게되면, 순간적으로 큰 토크가 발생합니다. 이 충격 부하가 너무 크면 기어 헤드 및 모터가 파손될 수 있습니다.모터는 기어 헤드 출력축에 걸리는 부하의 관성(JG)을 모터축 관성(JM)으로 환산하여 그 값이 아래 표의 값을 초과하지 않는 범위에서 선정해야 합니다. 부하의 종류에 따라 관성이 다릅니다.
L스러스트 하중
오버행 하중
*출력축의 L/2의 경우
●모터축에 걸리는 관성 모멘트 구하는 방법
JM = JG × 1i2
JG : 기어 헤드 출력축 관성〔kg·cm2〕 JM : 모터축 관성〔kg·cm2〕 i : 감속비〔예: 1/5인 경우 i=5〕
✽3상 모터의 허용 부하 관성은 일단 정지한 후 역전시키는 경우의 값입니다.✽관성 모멘트의 표시 방법으로 J나 GD2가 사용되는데 J는 일반적으로 관성(inertia)이라고 불
리며 SI 단위계에서의 물리적인 관성 모멘트와 같은 값입니다. 단위는 (kg·m2)를 사용합니다. 한편 GD2(GD square)는 플라이 휠 효과라고도 하며 기존 단위계인 중력 단위계에서의 공업적인 계산에 자주 사용됩니다. 단위는 〔kgf·m2〕 또는 〔kgf·cm2〕 를 사용합니다. J와 GD2의 관계를 수치로 표현하면 J=GD2/4입니다.(J의 단위는 역학적인 의의보다 본래는 〔kg·m2〕 를 사용해야 하지만 쉽게 계산하기 위해 여기서는 〔kg·cm2〕를 사용하고 있습니다.)
Q서비스 팩터일반적으로 부하는 변동하는 일이 많아 그와 같은 경우의 수명 등을 고려할 경우, 부하의 종류에 따라 서비스 팩터라고 불리는 계수를 사용합니다.아래 표에서 서비스 팩터를 선택하고 필요한 동력을 곱해서 설계 동력을 계산해 주십시오.
부하의 종류 부하 예서비스 팩터
1일 5시간 1일 8시간 1일 24시간일정 부하 벨트 컨베이어, 한 방향 연속 운전 0.8 1.0 1.5
경충격 기동, 정지, 캠 구동 1.2 1.5 2.0
중(中)충격 순간 정역전, 순간 정지 1.5 2.0 2.5
중(重)충격 충격 빈도가 많은 것 2.5 3.0 3.5
E 모터의 온도 상승의 기술 데이터에 관해서는 홈페이지를 참조해 주십시오.
Q기어 헤드의 허용 오버행 하중과 허용 스러스트 하중E 기어 헤드 출력축에 대해서 수직 방향에 가해지는 오버 행 하중은 상대 기
계와 체인 또는 벨트로 연결되는 경우에 발생하는데, 커플링과 직결되는 경우에는 발생하지 않습니다.
E오버 행 하중·스러스트 하중은 베어링의 수명이나 강도에 큰 영향을 주기 때문에 운전 시의 부하가 아래 표의 허용 하중을 초과하지 않도록 주의해 주십시오.
SI 단위계 중력 단위계
하중를 들어 올리는 경우
T= 12 D·W〔N·m〕
D : 드럼 직경〔m〕 W : 하 중〔N〕
T= 12 D·W〔kgf·m〕
D : 드럼 직경〔m〕 W : 하 중〔kgf〕
관성체를 구동하는 경우 T= J9.55×104 ·
Nt 〔N·m〕
N : 회전 속도〔r/min〕 J : 관성〔kg·cm2〕 t : 시 간〔sec〕
T= GD2
375×104 · Nt 〔kgf·m〕
N : 회전 속도〔r/min〕 GD2 : 플라이 휠 효과〔kgf·cm2〕
t : 시 간〔sec〕
벨트 컨베이어의 경우 T= 12 D(F+μWg)〔N·m〕
D : 롤러의 직경〔m〕 W : 부하의 질량〔kg〕 g : 중력 가속도〔m/s2〕 μ : 마찰 계수 F : 외 력〔N〕
T= 12 D(F+μW)〔kgf·m〕
D : 롤러의 직경〔m〕 W : 부하의 중량〔kgf〕 μ : 마찰 계수 F : 외 력〔kgf〕
접촉면을 수평 이동하는 경우 T= 12 D·μWg〔N·m〕
D : 드럼 직경〔m〕 W : 질 량〔kg〕 μ : 마찰 계수 g : 중력 가속도〔m/s2〕
T= 12 D·μW〔kgf·m〕
D : 드럼 직경〔m〕 W : 중 량〔kgf〕 μ : 마찰 계수
볼 나사를 구동하는 경우 T= 12π P(F+μWg)〔N·m〕
F : 외 력〔N〕 W : 워크의 질량〔kg〕 μ : 접동면 마찰 계수〔0.05~0.2 정도〕 g : 중력 가속도〔m/s2〕 P : 볼 나사 리드〔m〕
T= 1
2π P(F+μW)〔kgf·m〕
F : 외 력〔kgf〕 W : 부하의 중량〔kgf〕 μ : 접동면 마찰 계수〔0.05~0.2 정도〕 P : 볼 나사 리드〔m〕
형식출력 (W)
모터축에서의 허용 관성 모멘트
Type A전자 브레이크 장착 모터 이외 전자 브레이크 장착 모터
JM(kg·cm2) GD2M(kgf·cm2) JM(kg·cm2) GD2M(kgf·cm2)
PACMGX
60 6 0.125 0.50 0.08 0.32
70 15 0.125 0.50 0.158 0.63
80 25 0.138 0.55 0.178 0.71
90 40 0.400 1.60 0.735 2.94
PACMGZ 9060 0.650 2.60 0.875 3.50
90 0.650 2.60 1.000 4.00
형식 허용 오버 행 하중✽ N(kgf)
허용 스러스트 하중
N(kgf)Type A
PACMGX(모터 출력 40W 이하용)
60 98(10) 29(3)
70 196(20) 39(4)
80 294(30) 49(5)
90 392(40) 98(10)
PACMGZ(모터 출력 60W 이상용)
90 588(60) 147(15)
W
D벨트휠
모터
모터
플라이휠
W
F
D
모터
WD
모터
벨트휠
F
P
μ
W










![자이로스코프 - phylab.yonsei.ac.krphylab.yonsei.ac.kr/exp_ref/106_Gyroscope_KOR.pdf · 국제캠퍼스 실험] 자이로스코프 . 자이로스코프를. 사용하여 회전](https://img.dokumen.tips/doc/110x75/5e0fcb42db1f093f1458d1f8/eoe-eoe-eoe-eoee.jpg)














![분쟁사례에서 본 특허의 중요성...[발명의 명칭] 회전 궤도 인공 위성 [특허청구범위] 청구항 1. 지구상의 일정 궤도를 회전하는 인공 위성에](https://img.dokumen.tips/doc/110x75/5fec40993236c45ca23e6694/eeoe-e-eoee-e-oe-ee.jpg)



