Embed Size (px)
Citation preview

Journal of Environmental Management (1997) 49, 95–106
Combination of Differentiated Prediction Approach and IntervalAnalysis for the Prediction of Weather Variables Under Uncertainty
Jun Xia∗, Guo H. Huang† and Brad Bass‡
∗Department of River Engineering, Wuhan University of Hydraulic and ElectricalEngineering, Wuhan, Hubei 430072, China, †Environmental Systems Engineering,University of Regina, Regina, Saskatchewan, S45 0A2 Canada, and‡Environmental Adaptation Research Group, Atmospheric Environment Service,Downsview, Ontario, M3H 5T4, Canada
In this paper, a differentiated prediction model (DPM) was combined with aninterval analysis approach for the prediction of weather variables underuncertainty. The DPM was used for general trend prediction, and intervalanalysis was used for reflecting seasonal variations and residual terms. A casestudy of prediction for monthly average temperature and precipitation inWuhan, China, was provided based on 22 years of observation data. Theresults indicated that uncertainties existing in weather-related processes couldbe effectively reflected through this hybrid approach. The predicted intervalsfor temperature and precipitation appear to contain most of the relevantobserved values. 1997 Academic Press Limited
Keywords: differentiated prediction model, interval analysis, climate change,weather variable, uncertainty.
1. Introduction
In order to undertake further impact assessment and adaptation planning in climatechange impact studies, it is important to estimate basic weather variables, such astemperature and precipitation, in the future. Previously, there have been various studiesin this area, and many prediction methods have been proposed and applied (Williams,1982; Hirtzel and Chock, 1985; Gullett et al., 1991; Bass, 1993; Skinner and Gullett,1993; Bass et al., 1994). However, uncertainties may exist in various natural processesand human activities. To reflect them effectively in prediction modelling frameworks,more advanced technologies need to be used. The majority of existing methods thatdeal with uncertainty include fuzzy set theory and stochastic modelling, where problemsin data availability, solution difficulty, computational requirements and interpretationof results may affect their applicability (Zimmermann, 1976; Klir and Folger, 1988;Huang et al., 1994a,b).
In this paper, a differentiated prediction model (DPM) is combined with an intervalanalysis approach for the prediction of weather variables under uncertainty. This
0301–4797/97/010095+12 $25.00/0/ev960118 1997 Academic Press Limited

Prediction of weather variables96
approach can more realistically reflect uncertainties existing in weather-related processes.The DPM will be used for general trend prediction, and the interval analysis will beused for reflecting seasonal variations and residual terms. A case study of predictionfor monthly average temperature and precipitation in Wuhan, China, will be providedto demonstrate applicability of the proposed methodologies.
The structure of this paper is as follows. In Section 2, modelling formulations ofthe DPM and interval analysis approaches are described. Their application to theprediction for monthly average temperature and precipitation under uncertainty ispresented in Section 3. In Section 4, concluding remarks are offered.
2. Methodology
2.1.
The differentiated prediction model (DPM) can be used for extrapolating and predictingtrend values based on a series of observations. Let us consider a data set X (0) with nelements corresponding to n time periods:
X (0)={x(0)(i ) | i=1, 2, . . . , n}, (1)
where x(0)(i ) is the ith element corresponding to period i. The problem under con-sideration is the prediction of x(0)(i ) for i>n. When there is neither significant correlationbetween the x(0)(i ) values nor time series characteristics in X (0) due to the existenceof uncertainty, statistical parameter-estimation approaches may not be applicable.Consequently, the DPM is introduced to provide numerical prediction of the element.
First, concepts of accumulated generating operation (AGO) and inverse accumulatedgenerating operation (IAGO) are introduced for the transformation of input data.
Definition 1 The rth AGO of X (0) is defined as:
X (r)={x(r)(k) |k=1, 2, . . . , n}, ! r, (2)
where:
x(r)(k)=]k
i=1
x(r−1)(i ), ! k, r,
r≥1.
Definition 2 The pth IAGO of X (r) is defined as:
a(p)(X (r))={a(p)[x(r)(k) ] |k=1, 2, . . . , n; r≥1}, ! p, r, (3)
where:
a(p)[x(r)(k) ]=x(r−p)(k), ! k, p, r,
r≥1, p≥1.

J. Xia et al. 97
The AGO/IAGO transformations can provide clearer trend information of the inputdata series, which can then be approximated as a differential equation.
Definition 3 We define numerical derivative as follows:
d[x(r)(k+1)]/dt≅a(1)[x(r)(k+1)], ! k, (4)
where tv[k, k+1].
Definition 4 The support of x(r)(k+1) corresponding to t is defined as follows:
S[x(r)(t) ]=k[x(r)(k+1)]+(1−k)x(r)(k), (5)
where k is a weight coefficient.Thus, given a differential equation:
d[x(1)(k+1)]/dt+a[x(1)(k+1)]=b, (6)
we can convert it to:
a(1)[x(1)(k+1)]+aS[x(1)(t) ]=u, k=1, 2, . . . , n−1. (7)
Let:
C=[a, b]T, (8)
Y (0)={x(0)(i ) | i=2, 3, . . . , n}T, (9)
S(X (1))={S[x(1)(t) ] | tv[k, k+1]; k=0, 1, . . . , n−1}, (10)
where C is a vector of parameters in (10), Y (0) is a vector for x(0)(i ) and S(X (1)) is avector of the support for x(1)(t). Thus, we have:
Y (0)=a[S(X (1)) ]+uE,
=[S(X (1)), E ] [a, u]T,
=[S(X (1)), E ]C, (11)
where E=[1, 1, . . . , 1]T. Letting:
B=[S(X (1)), E ], (12)
we have:
C=(BTB)−1BTY (0). (13)

Prediction of weather variables98
Hence, x(1)(k+1), ! k, can be obtained by solving equation (10). From Definition 2,x(0)(k+1), ! k, can be obtained based on x(1)(k+1), ! k. Obviously, when k>n−1, theobtained x(0)(k+1) provides a trend prediction of the x value in future period k+1.Thus, the weather variables, such as monthly average temperature and precipitation,can be predicted through this DPM approach.
2.2.
When the input data vary significantly with time due to the existence of uncertain noiseand thus affect the DPM prediction accuracy, an interval analysis approach can beincorporated within the DPM modelling framework to improve its prediction accuracy.First, we define prediction errors of the DPM outputs as follows:
Sk=Xk−Tk , ! k, (14)
where Xk is the DPM prediction result for period k, Tk is the observed value in periodk, and Sk is the prediction error for period k. Obviously, Sk contains information ofseasonal variation of prediction accuracy. To remove this variation, we have thefollowing residual series:
Rk=Sk−Sk−12, ! k, (15)
where Rk is the error residual between the same month of two different years. Thevalue of Rk is often uncertain. Since distribution information for Rk is often unavailablein practical problems, an interval analysis approach is provided in this study. We willfirst introduce some useful definitions, and then provide the interval analysis formulation.
Definition 5 Let x denote a closed and bounded set of real numbers. An intervalnumber x± is defined as an interval with known upper and lower bounds but unknowndistribution information for x (Huang and Moore, 1993):
x±=[x−, x+]={tvx |x−≤t≤x+], (16)
where x− and x+ are the lower and upper bounds of x±, respectively. When x−=x+,x± becomes a deterministic number, i.e. x±=x−=x+.
Definition 6 Let R± denote a set of interval numbers. An interval vector X± is a tupleof interval numbers, and an interval matrix X± is a matrix whose elements are intervalnumbers:
X±={x±=[x−i , x+i }] |! i}, X±v{R±}1×n, (17)
X±={x±=[x−ij , x+ij ] |! i, j}, X±v{R±}m×n. (18)
Definition 7 Let ∗v{+,−,×,÷} be a binary operation on interval numbers. Forinterval numbers x± and y±, we have:
x±∗y±=[min{x∗y}, max{x∗y}], x−≤x≤x+, y−≤y≤y+. (19)

J. Xia et al. 99
In the case of division, it is assumed that y± does not contain a zero. Hence, we have:
x±+y±=[x−+y−, x++y+], (20)
x±−y±=[x−−y+, x+−y−], (21)
x±×y±=[min{x×y}, max{x×y}], x−≤x≤x+, y−≤y≤y+, (22)
x±÷y±=[min{x÷y}, max{x÷y}], x−≤x≤x+, y−≤y≤y+. (23)
Definition 8 For interval number x±, we have:
x±≥0, iff x−≥0 and x+≥0, (24)
x±≤0, iff x−≤0 and x+≤0. (25)
Definition 9 In this paper, we have the following for interval vectors and matrices:
X±≥0, iff x±ij≥0, ! i, j, X±v{R±}m×n, m≥1 and m=integer, (26)
X±≤0, iff x±ij≤0, ! i, j, X±v{R±}m×n, m≥1 and m=integer. (27)
Definition 10 For x± and y±, we have their order relations as follows:
x±≤y±, iff x−≤y− and x+≤y+, (28)
x±<y±, iff x−<y− and x+<y+. (29)
Definition 11 The mid-value of x± is defined as:
x(mid)=[x−+x+]/2. (30)
Definition 12 The radius of x± is defined as:
x(rad)=[x+−x−]/2. (31)
For the residual as defined in (15), assuming that linear relationships exist betweenthe residual in period k+1 and those in the previous periods (R±1 to R±k ), we have:
R±k=a±0 +]m
i=1
a±i R±k−i , k=m+1, m+2, . . . , n. (32)
For m interval coefficients R±k−i (i=1, 2, . . . , m) under a given k value (k>m), if p ofthem are positive, and q of them are negative, let the former p coefficients be positive,i.e. R±k−i>0 (i=1, 2, . . . , p), and the latter q coefficients be negative, i.e. R±k−i<0 (i=p+1, p+2, . . . , m), where p+q=m. Thus, the upper and lower bounds of R±k can be

Prediction of weather variables100
formulated as follows (when a±i ≥0):
R+k=a+0 +]p
i=1
a+i R+k−i+]m
i=p+1
a−i R+k−i , ! k, (33)
R−k=a−0 +]p
i=1
a−i R−k−i+]m
i=p+1
a+i R−k−i , ! k. (34)
Thus, according to Definitions 11 and 12, we have:
R(rad)k =a(rad)
0 +]m
i=1
a(mid)i R(rad)
k−i+]p
i=1
a(rad)i R(mid)
k−i
−]m
i=p+1
a(rad)i R(mid)
k−i , ! k. (35)
It is indicated from Equation (35) that uncertainty of Rk mainly results from twosources: system uncertainty from a(rad)
i , and input uncertainty from R(rad)k−i . Thus, if input
uncertainty is negligible, we have:
R(rad)k =a(rad)
0 +]p
i=1
a(rad)i R(mid)
k−i
−]m
i=p+1
a(rad)i R(mid)
k−i , ! k. (36)
If system uncertainty is negligible, we have:
R(rad)k =]
m
i=1
a(mid)i R(rad)
k−i , ! k. (37)
If both system and input uncertainties are negligible, we have:
R(rad)k =0, ! k, (38)
which leads to a deterministic model.The values of a(mid)
i can be estimated based on the mid-value equation for (32) asfollows:
R(mid)k =a(mid)
0 +]n
i=1
a(mid)i R(mid)
k−i , ! k. (39)
Thus, we have:

J. Xia et al. 101
A(mid)=(R(mid)TR(mid))−1(R(mid)TY (mid)), (40)
where
A(mid)={a(mid)i }(m+1)×1, R(mid)={R(mid)
k−i }(n−m)×(m+1)
and
Y (mid)={R(mid)k }(n−m)×1.
To estimate a(rad)i values, we first convert (35) to:
R(rad)k +]
n
i=1
a(mid)i R(rad)
k−i=a(rad)0 +]
p
i=1
a(rad)i R(mid)
k−i
−]q
i=p+1
a(rad)i R(mid)
k−i , ! k. (41)
Let:
R(rad)k +]
n
i=1
a(mid)i R(rad)
k−i={Z(rad)}(n−m)×1, ! k, (42)
and
a(rad)0 +]
p
i=1
a(rad)i R(mid)
k−i−]m
i=p+1
a(rad)i R(mid)
k−i
={R(mid)1 A(rad)}(n−m)×1, ! k, (43)
where A(rad)={a(rad)i }(m+1)×1. We have:
R(mid)1 A(rad)=Z(rad). (44)
Thus, we have the following non-linear programming problem:
Min %R(mid)1 A(rad)−Z(rad) % 2, (45a)
s.t. A(rad)≥0, ! i. (45b)
Model (45) can be converted to an unconstrained optimization problem by introducinga penalty function as follows:
Min %R(mid)1 A(rad)−Z(rad) % 2+x2 %A(rad)% 2. (46)
The solution procedure for the above model is as follows:

Prediction of weather variables102
1986
35
01981
Time
Mon
thly
ave
rage
tem
pera
ture
(°
C)
25
30
20
15
10
5
1982 1983 1984 1985
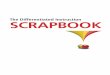
Figure 1. Calibration results for temperature prediction model (—— observed value, · · · · simulated interval,–·–·– simulated mid-value).
(i) Select an initial penalty value (e.g. letting x=0).(ii) Estimate an unconstrained solution for (45a) as follows:
A(rad)=(R(mid)T
1 R(mid)1 )−1(R(mid)T
1 Z(rad)). (47)
(iii) If the solutions for a(rad)i satisfy constraint (45b), they are the desired solutions
for the entire model. Otherwise, the x value should be increased to form a newmatrix:
R(mid)T
1 R(mid)1 +x2I, (48)
where I is a unity matrix.(iv) Go to step (ii).
3. Application
The above methods were applied to a case study of prediction for monthly averagetemperature and precipitation in Wuhan, China, which is located at the middle reachof the Yangtze River. Study of climate change impact assessment is important for thisarea because the Three Gorge Project, one of the world’s largest hydraulic engineeringprojects (Liu and Wu, 1985a,b), is located at its upper reach.
The DPM and interval analysis approaches were applied to the prediction ofmonthly average temperatures based on 22 years of observation data (1964 to 1985).Figure 1 shows part of model calibration results, where the DPM outputs (for yearsbefore 1985) were compared with the data used for parameter estimation. Figure 2presents the results of model verification, where the DPM prediction outputs for

J. Xia et al. 103
1994
35
01991
Time
Mon
thly
ave
rage
tem
pera
ture
(°
C)
30
25
20
15
10
5
1992 1993
(b)
1990
35
01986
Mon
thly
ave
rage
tem
pera
ture
(°
C)
30
25
20
15
10
5
1987 19891988 1991
(a)
Figure 2. (a) Verification results for temperature prediction model (1986–1990). (b) Verification results fortemperature prediction model (1991–1993) (—— observed value, · · · · simulated interval, –·–·– simulated mid-
value).

Prediction of weather variables104
1972
600
01967
Time
Mon
thly
pre
cipi
tati
on (
mm
)
300
500
400
200
100
1968 1969 1970 1971
Figure 3. Calibration results for precipitation prediction model (—— observed value, · · · · simulated value,–·–·– simulated mid-value).
1986–1993 were compared with the relevant observation data that were not used forDPM parameter estimation. The comparison results indicate that the predicted intervalsappear to contain most of the observed temperature values. Only some observed datain winter seasons were out of the intervals. Generally, satisfactory prediction resultsfor monthly average temperature have been generated through this hybrid approach.
The method was also applied to the prediction of monthly precipitation based on22 years of observation data (1961 to 1982). Figure 3 provides part of model calibrationresults. The model was further verified through a comparison between the DPMprediction results for 1983–1990 and the observed monthly precipitation data that werenot used for DPM parameter estimation (Figure 4). It is indicated that the predictionintervals for monthly precipitation appear to contain most of the observed values. Onlysome summer peaks in July and August were out of the predicted intervals. Thus, themodelling performance for the above case study suggests that the hybrid approach thatcombines both DPM and interval analysis within a general modelling framework is aneffective tool for the prediction of weather variables in climate change impact studies.
4. Concluding remarks
In this paper, a hybrid approach that combines both differentiated prediction methodand interval analysis within a general modelling framework was proposed and appliedto the prediction of weather variables under uncertainty. A case study of predictionfor monthly average temperature and precipitation in Wuhan, China, was provided.The results indicated that uncertainties existing in weather-related processes couldbe effectively reflected through this proposed approach. The method also has lowcomputational requirements and can be conveniently applied to other cases.

J. Xia et al. 105
1991
400
01986
Time
Mon
thly
pre
cipi
tati
on (
mm
)
300
200
100
1987 1988 1989 1990
(b)
01983 1984 1985 1986
200
500
400
300
100
(a)
Mon
thly
pre
cipi
tati
on (
mm
)
Figure 4. (a) Verification results for precipitation prediction model (1983–1985). (b) Verification results forprecipitation prediction model (1986–1991) (—— observed value, · · · · simulated value, –·–·– simulated mid-
value).
A potential improvement of the DPM is to consider higher order differentialequations for Equation (6), or to introduce a series for its right-hand side (b value).This improvement may be beneficial when the input data sets are highly uncertain.

Prediction of weather variables106
The authors wish to acknowledge support provided by the Programme of Biospheric Aspects ofthe Hydrological Cycle (BAHC) under the International Geosphere–Biosphere Programme(IGBP).
References
Bass, B. (1993). Summary Report on Activity 4.1: Data Requirements for Ecological and Hydrological Studiesand Related Management Purposes. Biospheric Aspects of the Hydrological Cycle (BAHC), InternationalGeosphere-Biosphere Programme (IGBP), Potsdam, Germany: BAHC Core Project Office.
Bass, B., Huang, G. H., Yin, Y. Y. and Cohen, S. (1994). A grey systems approach for estimating risksassociated with general circulation models. In Time Series Analysis in Hydrological and EnvironmentalEngineering (K. W. Hipel and L. Fang, eds), pp. 33–46. Dordrecht, The Netherlands: Kluwer Academic.
Gullett, D. W., Vincent, L. and Malone, L. H. (1991). Homogeneity Testing of Monthly Temperature Series,Canadian Climate Centre, Report No. 91-10, Atmospheric Environment Service, Downsview, Ontario,Canada.
Hirtzel, C. S. and Chock, D. P. (1985). Statistics of extreme values of a first-order Markov normal process:an exact result. Atmospheric Environment 19, 1207–1218.
Huang, G. H. and Moore, R. D. (1993) Grey linear programming, its solving approach, and its applicationto water pollution control. International Journal of Systems Sciences 24, 159–172.
Huang, G. H., Baetz, B. W. and Patry, G. G. (1994a). Grey dynamic programming for waste managementplanning under uncertainty. ASCE Journal of Urban Planning and Development 120, 132–156.
Huang, G. H., Baetz, B. W. and Patry, G. G. (1994b). A grey chance-constrained programming approachfor environmental management planning under uncertainty. In Effective Environmental Management forSustainable Development (K. W. Hipel and L. Fang, eds), pp. 267–280. Dordrecht, The Netherlands:Kluwer Academic.
Klir, G. J. and Folger, T. A. (1988). Fuzzy Sets, Uncertainty, and Information. Englewood Cliffs, New Jersey:Prentice Hall.
Liu, C. and Wu, C. (1985a) China’s water resources development: problems and prospects. Geojournal 10,130–132.
Liu, C. and Wu, C. (1985b) A real reallocation of China’s water resources. Geojournal 10, 157–162.Skinner, W. R. and Gullett, D. W. (1993) Trends of daily maximum and minimum temperature in Canada
during the past century. Climatological Bulletin 27, 63–77.Williams, P. C. (1982). A new estimation method for the Lognormal distribution. Journal of Air Pollution
and Control Association 32, 1071–1090.Zimmermann, H. J. (1976). Description and optmization of fuzzy systems. International Journal of General
Systems 2, 209–215.