Embed Size (px)
Citation preview

Cognitive Radio -Quantifying Reuse Opportunities in Indoor Environments
TAUFIK PUTRA HASBY
Master of Science Thesis Stockholm, Sweden 2009


Cognitive Radio - Quantifying Reuse Opportunities in Indoor Environments
TAUFIK PUTRA HASBY
Master of Science Thesis performed at
the Radio Communication Systems Group, KTH.
May 2009
Examiner:Professor Jens Zander
KTH School of Information and Communications Technology (ICT)Department of Communication Systems (CoS)
CoS/RCS 2009-07
c©Taufik Putra Hasby, May 2009
Tryck: Universitetsservice AB

ii
ABSTRACT
The notion “Cognitive Radio” refers to various solutions that seek to underlay
or overlay the secondary users’ signals with the primary users’ signals in such a way
that the primary users are as unaffected as possible. Lately, the research in Cognitive
Radio has gained more attention because of the increasing attempt to better utilize idle
spectrum portions at various time and locations. It is desirable that those idle spectrum
portions can accommodate unlicensed wireless devices without interfering with the
communications of the licensed users.
The aim of this thesis work is to assess the feasibility of opportunistic-access-
based cognitive radio in indoor environments. We have used MATLAB to conduct a
simulation for estimating frequency reuse opportunity in indoor environments. We
review the effect of different indoor environment types, placement settings, and
sensing strategies on the quantity and visibility of the spectrum reuse opportunities.
Based on this understanding, we are able to assess the kind of possible application of
this cognitive radio system in an indoor environment.
Simulation results showed that reuse opportunities are highly dependent on
transmitter-receiver placement. Through several types of placement setting/strategy,
we concur that the system works best as a short-range communication system in
indoor environments. We can obtain maximum reuse opportunity by combination of
careful transmitter and receiver placement, advanced sensing strategy, and responsive
transmitter. From the simulation, we obtain the maximum reuse opportunity when we
employ both primary and secondary system as a short-range communication system
while limiting the distance between the transmitter and the corresponding receiver.
Our results also showed some similarities with outdoor simulation/scenario,
namely that sensing does not help much in exploiting reuse opportunities and that
lowering the sensing threshold does not give a significant improvement on the success
probability when both the primary and secondary transmitter are transmitting at the
same time.
Keywords: Cognitive Radio, Spectrum Holes, Spectrum Sensing, Spectrum Sharing.
iii
ACKNOWLEDGEMENTS
First, I would like to thank God Almighty, The Most Merciful and Most
Gracious, for without His benevolence and guidance I would not be able to have a
meaningful life, a life that allows me to partake in the world of wireless technology
through this thesis work.
I would like to convey my sincerest thanks for my advisor, Prof. Jens Zander,
for his support, guidance, encouragement, and positive attitude throughout the work
of this thesis. It has been an honor and a great privilege for me to have this
opportunity and to work under his supervision. I would also like to thank the other
members of the Radio Communications Systems group at KTH, especially Ömer Ileri
and Luca Stabellini, for the fruitful discussions we had. I really appreciate their
comments and inputs during the proposal formulation of this thesis work.
I owe much to my parents, for their undying love and support, without which I
might have given up pursuing a master degree at the very beginning of this long and
arduous journey. They are my Nur Jahan whose love is like tears from the stars.
Thank you Mom, you are the queen of my heart. Thank you Dad, you are my hero and
superstar. Loving them both is like food to my soul.
My sincere gratitude goes to Anto Sihombing for being such an
accommodating opponent during my thesis defence. His insights are indeed valuable
for finalizing this thesis report. I also need to thank my friend Siti Halida for her
assistance in proofreading this thesis report. A million thanks for both of them.
A very special thank you goes to my benefactor, Ericsson Indonesia, for
providing me with the much-needed financial assistance, which allows me to
complete my two-year study at KTH. Thank you for Ms. Yoke Prabandari and Mr.
Irwan Setiawan whose assistance has enabled a smooth funding to take place.
I would also like to thank Cecilia Forssman and Karin Knutsson for their help
in coordinating with Ericsson Indonesia and getting me settled to study in Stockholm.
Their valuable help in academic matters, i.e. information and administration, is also
much appreciated.
Thank you to my entire friend in the KTH Wireless Systems program for
making my life here much easier and more enjoyable than it is in reality. My only
regret is I did not get to know you sooner and better throughout this two years. The
iv
same thanks also goes for all the Indonesian people in Sweden, especially Indonesian
students from the Indonesian Students Association in Sweden (PPI Swedia) and the
Indonesian embassy community (KBRI Swedia).
Last but by no means least; I would like to thank a very special friend of mine,
Rahmadina Ramsi, whose smile and well-being has become a source of strength and
happiness for me. Her presence in my life has provided me with an additional raison
d’etre, which is essential in helping me to finish my study on time. Thank you, Ira.
Stockholm, May 2009
Taufik Putra Hasby
v
TABLE OF CONTENTS
TITLE PAGE ………………………………………………………………………i
ABSTRACT ………………………………………………………………………..ii
ACKNOWLEDGEMENTS ………………………………………………………iii
TABLE OF CONTENTS ……………………………………………………….....v
LIST OF FIGURES ………………………………………………………………vii
LIST OF TABLES …………………………………………………………………x
ACRONYMS AND ABBREVIATIONS …………………………………………xi
CHAPTER 1 INTRODUCTION ………………………………………………….1
1.1 Problem background ………………………………………………………...1
1.2 Aim of the thesis work ………………………………………........................3
1.3 Previous Works ……………………………………………………………...4
1.3.1 Defining Cognitive Radio (CR) ……………………………………….4
1.3.2 Spectrum Sensing ……………………………………………………...7
1.3.3 Spectrum Sharing ……………………………………………………..11
1.3.4 Power Control ………………………………………………………...14
1.4 Problem definition ……………..………………………………………........15
1.5 Research method ……………………………………………………………17
1.6 Thesis outline ……………………………………………………………….17
CHAPTER 2 MODELS ……...……………………………………………………19
3.1 System model ………………………….........................................................19
3.2 Indoor propagation model …………………………………………………..22
3.3 Sensing and spectrum access strategies …………….……………………....24
3.4 Placement settings …………………………………………………………..26
3.5 Performance measures ……………………………………………………....30
3.6 Simulation chain ………………………………………………………….....31
CHAPTER 3 SIMULATION RESULTS AND ANALYSIS …………………….32
3.1 Effect of TX/RX placement setting ………………………………………….32
3.2 Effect of sensing threshold …………………………………………………..38
3.3 Effect of different environment ……………………………………………...41
CHAPTER 4 CONCLUSION AND FUTURE WORKS ………………………...43
REFERENCES …………………………………………………………………......45
vi
APPENDIX A SIMULATION FLOWCHART …...……………………………..49
APPENDIX B ADDITIONAL RESULTS …...…………………………………...50
vii
LIST OF FIGURES
Figure 1-1. Links setting with marked signals. …………………………………... 16
Figure 2-1. The office environment. ……………………………………………... 20
Figure 2-2. The commercial environment (e.g. mall). …………………………… 20
Figure 2-3. The factory environment. ……………………………………………. 21
Figure 2-4. Schematic diagram of the network topology, dashed lines indicate
unwanted signal paths. ……………………………………………………
22
Figure 2-5. Illustration of path-loss calculation using KM model, here the path-
loss between T – R1 and T – R2 will be the same. ……………………….
23
Figure 2-6. A) Transmitter sensing and silent receiver, B) Transmitter and
receiver sensing. …………………………………………………………..
26
Figure 2-7. Example of uniformly distributed transmitter/receiver placement in
the office environment. …………………………………………………...
27
Figure 2-8. Office environment with example of primary and secondary
transmitter/receiver realization using a placement setting 2). …………….
28
Figure 2-9. Uplink scenario in an office environment. …………………………... 29
Figure 2-10. Downlink scenario in an office environment. ……………………… 30
Figure 3-1. Comparison of reuse opportunities for different dmax/placement and
different sensing strategy, office environment. …………………………...
32
Figure 3-2. Comparison of conditional success probability for different
dmax/placement and different sensing strategy at κ = -95 dBm, office
environment. ……………………………………………………………...
34
Figure 3-3. Comparison of primary link success probability for different
dmax/placement and different sensing strategy at κ = -95 dBm, office
environment. ……………………………………………………………...
35
Figure 3-4. Reuse opportunities based on different Tx/Rx placement and
different sensing scheme in an office environment. ………………………
36
Figure 3-5. Conditional success probabilities based on different Tx/Rx placement
and different sensing scheme in an office environment, κ = -95 dBm. …..
37
Figure 3-6. Actual success probabilities based on different Tx/Rx placement and
different sensing scheme in an office environment, κ = -95 dBm. ……….
37
viii
Figure 3-7. Primary link success probabilities based on different Tx/Rx
placement and different sensing scheme in an office environment, κ = -95
dBm. ………………………………………………………………………
38
Figure 3-8. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), office environment. ………….
39
Figure 3-9. Performance comparison for different environment with purely
random TX/RX placement setting, using TX sensing. …………………...
41
Figure A-1. Main simulation flowchart. …………………………………………. 49
Figure B-1. Clear channel and success probability for TX&RX sensing
compared with TX sensing, office environment, dmax = 40 m. …………...
50
Figure B-2. DPC and TX sensing, success probability and missed opportunities
as a function of sensing threshold, office environment, dmax = 40 m. …….
51
Figure B-3. DPC and TX&RX sensing, success probability and missed
opportunities as a function of sensing threshold, office environment, dmax
= 40 m. ……………………………………………………………………
52
Figure B-4. Collaborative sensing using additional sensor, primary transmitter
sensing and silent primary receiver, office environment, dmax = 40 m. …..
52
Figure B-5. Comparison of success probabilities based on different sensing
scheme, office environment with dmax = 40 m. …………………………...
53
Figure B-6. Success probabilities and missed opportunities as a function of
sensing threshold for different dmax using TX sensing. …………………
54
Figure B-7. TX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, uplink scenario. ……..
55
Figure B-8. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, uplink scenario. ……..
55
Figure B-9. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment, uplink scenario. ………………….
56
Figure B-10. Comparison of success probabilities based on different sensing
scheme, office environment, uplink scenario. …………………………….
56
Figure B-11. TX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, downlink scenario. ….
57
Figure B-12. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, downlink scenario. ….
57
ix
Figure B-13. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment, downlink scenario. ………………
58
Figure B-14. Comparison of success probabilities based on different sensing
scheme, office environment, downlink scenario. …………………………
58
Figure B-15. Clear channel and success probability for TX&RX sensing
compared with TX sensing, office environment. …………………………
59
Figure B-16. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), office environment. ………….
59
Figure B-17. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment. …………………………………...
60
Figure B-18. Comparison of success probabilities based on different sensing
strategy, office environment. ……………………………………………..
60
Figure B-19. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), commercial environment. …...
61
Figure B-20. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), commercial environment. …...
61
Figure B-21. DPC, success probability and missed opportunities as a function of
sensing threshold, commercial environment. ……………………………..
62
Figure B-22. Comparison of success probabilities based on different sensing
strategy, commercial environment. ……………………………………….
62
Figure B-23. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), factory environment. ………...
63
Figure B-24. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), factory environment. ………...
63
Figure B-25. DPC, success probability and missed opportunities as a function of
sensing threshold, factory environment. ………………………………….
64
Figure B-26. Comparison of success probabilities based on different sensing
strategy, factory environment. ……………………………………………
64

x
LIST OF TABLES
Table 2-1. Environment Characteristics ………………………………………….. 21
Table 2-2. Common Simulation Parameters ……………………………………... 22
xi
ACRONYMS AND ABBREVIATIONS
BS Base Station
CCC Common Control Channel
CR Cognitive Radio
DPC Distributed Power Control
FCC Federal Communication Commission
LO Local Oscillator
MAC Medium Access Control
Ofcom Office of Communications
PDA Personal Digital Assistant
PHY Physical (layer in OSI and/or TCP/IP model)
PRx, PRX Primary Receiver
PTx, PTX Primary Transmitter
QoS Quality of Service
RF Radio Frequency
Rx, RX Receiver
SDR Software Defined Radio
SINR Signal-to-Interference-plus-Noise Ratio
SNR Signal-to-Noise Ratio
SRx, SRX Secondary Receiver
STx, STX Secondary Transmitter
Tx, TX Transmitter
TV Television
UWB Ultra Wide Band
1
CHAPTER 1
INTRODUCTION
1.1 Problem Background
Wireless communication keeps experiencing ongoing development throughout
the world. As a result, various wireless technologies emerge, causing a huge increase
in bandwidth demand. Traditional spectrum management approaches involve dividing
the available bandwidth into numerous frequency bands and allocating them to
different licensed users, usually through auction processes. Although this approach is
enough to ensure the coexistence of multiple wireless systems, i.e. in minimizing the
interference between licensed users, it leads many to think that there is a severe
spectrum shortage/scarcity, since regulators already assigned most frequency band to
different licensees. The Federal Communications Commission’s (FCC’s) frequency
allocation chart clearly illustrates this crowded spectrum problem [1]. In short, this
traditional policy results in licenses with exclusive access to the spectrum, thus
allowing no spectrum sharing mechanisms.
Despite of the situation, various measurements have shown that much of the
spectrum is idle at any given instant and location, because when licensees are not
transmitting the spectrum is unoccupied [2]. One can infer that part of the shortage in
spectrum comes from spectrum policies that allow little or no sharing at all.
With newly emerging technologies, questions arise whether those idle
spectrum portions (the so-called “Spectrum Holes” or “White Space” [3]) can
accommodate unlicensed wireless devices without interfering with the
communications of the licensed users. One such solution to utilize those idle spectrum
portions is by using the concept of “Cognitive Radio”.
In a broader sense, since interference can also arise between unlicensed users,
we use the term “Cognitive Radio” to refer to various solutions that seek to underlay
or overlay the secondary users’ signals with the primary users’ signals in such a way
that the primary users are as unaffected as possible [4]. Notice here that now we use
the term “primary and secondary users” instead of “licensed and unlicensed users” to
give a more general picture of this area (cognitive radio).
2
In the ‘underlay’ technique, utilizing Ultra Wide Band (UWB) systems enable
simultaneous primary and secondary transmissions. Here the secondary radio spreads
its signal over a bandwidth large enough to ensure that the amount of interference
caused to the primary users is within tolerable limits. Due to the interference
constraints associated with underlay systems, the underlay technique is only useful for
short-range communications [4].
The idea of opportunistic communication forms the basic of the ‘overlay’
technique. As stated before, recent studies show that in spite of the overcrowded
spectrum perspective, a major part of the spectrum is typically underutilized. In other
words, there exist instantaneously unused spectrum portions (referred to as “spectrum
holes”) that are not in use by the primary owners and consequently the secondary
users can utilize these “holes” for communication. These spectrum holes change with
time and location. The secondary radio in this technique, therefore, is an intelligent
wireless communication system that periodically monitors the radio spectrum, detects
the presence/absence of primary users in the different frequency bands and then
opportunistically transmits the secondary signal through the gaps that arise in
frequency and time. Successful frequency re-uses over the spectrum holes will
improve the spectrum utilization. In this technique, accurate detection of the presence
of primary systems, especially in low SNR (Signal-to-Noise Ratio) scenarios, is
critical to cognitive radio operation. In short, we mention this technique as
‘interference avoidance’ model.
This thesis work will focus on the second approach of cognitive radio where
interference avoidance is of the utmost importance [3]-[13]. Here the secondary users
actively monitor frequency bands (i.e. ‘sense’ the frequencies) to detect any
occupancies or holes in the spectrum before they begin any transmission. The
secondary users will then communicate over the spectrum holes in an opportunistic
manner, while trying to maintain minimal interference to the primary users.
One important concept in this work will be the concept of “spectrum holes”.
These “pieces” of instantaneously unused spectrum portions [3] or frequency voids
are not in use by the primary owners and consequently the secondary users can use
them for communication [4][5]. Note that the “holes” are dynamic in nature, i.e. one
can find different amounts and places of “holes” in a frequency band during any given
time at a specific location. This is why the need of a good sensing mechanism to
monitor frequency bands is important to support successful deployment of cognitive

3
radio system. In sensing these so-called “spectrum holes”, there are two basic
properties regarding the behavior of the primary users [4][5]:
• Distributed: Different secondary users in different locations will detect
different activities of the primary users (which are also located in different
location). The activity detected will largely depend on the secondary users’
sensing region. Depending on the location of a certain primary user, different
secondary users may interpret the activity differently. For example, when one
secondary user is located near a primary user and the other secondary user is
located far away. Depending on their sensing threshold, the close secondary
user may decide that there is an activity from the primary user while the other
secondary user decides that there is no activity from the primary user and
therefore begin to transmit.
• Dynamic: The primary users’ activity is also dynamic in time. Over time,
different primary users can become active or inactive in different segments of
the spectrum. Therefore, the primary user activity sensed at the secondary user
changes with time.
To optimize the cognitive radio system performance based on this interference
avoidance approach, one must select an appropriate sensing threshold for the
secondary users. When the secondary users employ very sensitive detectors (detectors
with very low threshold), they may repeatedly experience false alarm, i.e. assuming
primary users are occupying the channel because the detectors interpret noises as
message signals. On the other hand, using a rather high threshold in the secondary
users detectors may disrupt the performance of the primary users, since the “deaf”
secondary users will transmit more often than they should, therefore causing much
undesired interference to the primary users.
1.2 Aim of the thesis work
There have been many works in quantifying spectrum holes opportunities, in
terms of frequency reuse opportunities [3], increase in overall system
throughput/capacity [4]-[6], or probability of detecting the spectrum holes [8]-[13].
Most of the works do not consider specific environment for cognitive radio system
deployment (choices on the fading model influence the results), while the work in [3]

4
aims exclusively in quantifying frequency reuse opportunities in outdoor
environments with different terrain condition.
Previous work in [3] forms the basis of this thesis work. The aim of this thesis
work is to quantify the reuse opportunity in an indoor environment, i.e. whether such
opportunistic access in indoor environments is feasible. We will try to see the effect
of different sensing scheme, transmitter-receiver placement setting, and indoor
environment type towards the reuse opportunity and reuse opportunity detection.
1.3 Previous works
Lately there have been many works in the field of Cognitive Radio (CR).
Some worth noting include works on defining CR, works on spectrum sensing in CR,
works on spectrum sharing in CR, and works on power control in CR.
1.3.1 Defining Cognitive Radio (CR)
Since the concept of cognitive radio is relatively new, one of the foreseeable
implications is that the term may constitute different things to different people [14].
Various research publications have used different definition to explain about cognitive
radio, each usually geared to fit the main theme/subject of the research.
In 1999, an article by Joseph Mitola III used the term Cognitive Radio (CR) in
public for the first time [15]. He defined the term CR as:
“The point in which wireless personal digital assistants (PDAs) and the related
networks are sufficiently computationally intelligent about radio resources and
related computer-to-computer communications to detect user communications needs
as a function of use context, and to provide radio resources and wireless services
most appropriate to those needs.” [16]
Joseph Mitola III developed the definition in the context of a Software-Defined Radio
(SDR), where software reprogramming could easily reconfigure the radio to operate
on different frequencies with different protocols. Later on, however, different authors
would reuse and rework the term to suit their different requirements.
An example of a later definition is the one used by FCC and similarly by
Office of Communications (Ofcom), which states [14]:
“A Cognitive Radio (CR) is a radio that can change its transmitter parameters based
on interaction with the environment in which it operates. The majority of cognitive
5
radios will probably be SDR (Software Defined Radio) but neither having software
nor being field programmable are requirements of a cognitive radio.”
Using this definition, the notion of cognitive radio also encompasses other types of
radio beside the SDR. We can also see that so far, there is no unique definition for
cognitive radio, and depending on the focus (e.g. user’s requirements versus system
requirements) and applications; we can put forward different definitions. Most
definitions, however, stated that reconfigurable and intelligent adaptive behaviors
(cognitive capability) are the two main characteristics of a cognitive radio system
[14][17].
• Cognitive capability: Through real-time interaction with the radio
environment, CR can identify the portions of the spectrum that are unused at a
specific time or location. CR enables the usage of temporally unused
spectrum, referred to as spectrum hole or white space. Consequently, CR users
can select and exploit the best spectrum and share it with other CR users,
without interfering with the licensed users.
• Reconfigurability: Network operators/providers can program CR to transmit
and receive on a variety of frequencies, and use different access technologies
supported by its hardware design. Through this capability, CR users can select
and reconfigure the best spectrum band and the most appropriate operating
parameters.
In the same paper, Nekovee [14] proposed his own definition of cognitive
radio in accordance with the analysis approach used in the paper. In [14], the author
uses the following definition:
“A cognitive radio is an autonomous radio that can intelligently adapt its operational
characteristics (frequency, waveform, modulation, power, antenna) on the fly, in
response to changes to its electromagnetic environment while complying with
spectrum policies, with the aim of optimally meeting user’s requirements for wireless
access.”
The author of [14] emphasized that intelligently adaptive here does not involve
system programming beforehand, but some form of learning conducted by the system.
Furthermore, the term ‘radio’ here denotes any system that communicates with other
systems through a modulated signal within the radio frequency spectrum.
6
From the above definition, it follows that cognitive radio functionality requires
the following capabilities [14]:
• Flexibility and agility: the ability to change the waveform and other radio
operational parameters on the fly.
• Sensing: the ability to observe and measure the state of the environment,
including spectral occupancy.
• Learning and adaptability: the ability to analyze sensory input, recognize
patterns and modify internal operational behavior based on the resultant
analysis of the new situation, not only based on pre-coded algorithms and
heuristics but because of a learning mechanism.
• Location awareness: the ability to respond to spatially variant regulatory
policies or spatially variant spectrum availabilities.
In this thesis work, we only simulate some certain aspects of cognitive radio.
Thus for the sake of work consistency, here we will define cognitive radio as:
“A secondary radio system which is able to share the wireless channel with a primary
radio system in an opportunistic manner, based on decisions taken from a spectrum
sensing strategy.”
Our definition highlighted two of the four main challenges in dynamic spectrum
management techniques [17], namely spectrum sensing and spectrum sharing. We
will describe these two challenges with more details in the following sections of this
chapter. The other two challenges, described in [17], which will not be our focus in
this work, are:
• Spectrum decision: the ability of CR systems to decide, according to the
Quality of Service (QoS) requirements of the applications, which is the best
spectrum band among the available bands.
• Spectrum mobility: the ability of CR to change its operating spectrum band(s)
in the event that a primary user activity occurs in the selected spectrum.
Spectrum mobility gives rise to spectrum handoff, which is a new type of
handoff in CR networks.
As we will mention in later chapter with more detail, our work here only consider an
identical primary and secondary systems in terms of carrier frequency and bandwidth,
hence no spectrum decision and spectrum mobility is required here.
7
1.3.2 Spectrum Sensing
The design of a CR system should enable it to be aware of and sensitive to the
changes in its surroundings, which makes spectrum sensing an important requirement
for the realization of CR networks. Spectrum sensing enables CR users to adapt to the
environment by detecting spectrum holes without causing interference to the primary
network. The CR system can accomplish this through a real-time wideband sensing
capability to detect weak primary signals in a wide spectrum range. Akyildiz et al.
[17] have classified spectrum-sensing techniques into three groups: primary
transmitter detection, primary receiver detection, and interference temperature
management.
In primary transmitter detection, the CR transmitter will try to detect weak
signal from a primary transmitter to decide whether it should begin a transmission
attempt. Cabric et al. [7] have listed three sensing schemes for primary transmitter
detection:
• Matched filter detection: A matched filter is the optimal way for any signal
detection since it maximizes the received SNR. However, a matched filter
effectively requires demodulation of a primary user signal, which means that
the cognitive radio must have a priori knowledge of primary user signal at
both PHY (physical) and MAC (Medium Access Control) layers, e.g.
modulation type and order, pulse shaping, packet format. The main advantage
of matched filter is that due to coherency it requires less time to achieve high
processing gain. However, a significant drawback of a matched filter is that a
cognitive radio would need a dedicated receiver for every primary user class.
• Energy detection: One approach to simplify matched filtering approach is to
perform non-coherent detection through energy detection. We use this sub-
optimal technique especially when the CR cannot gather sufficient information
about the primary user signal. Several drawbacks of energy detectors might
diminish their simplicity in implementation. First, a threshold used for primary
user detection is highly susceptible to unknown or changing noise levels.
Second, energy detectors often generate false alarms triggered by unintended
signals because they cannot differentiate signal types, i.e. between modulated
signals, noise and interference.
8
• Cyclostationary feature detection: In general, transmitters coupled the
modulated signals with sine wave carriers, pulse trains, repeating spreading,
hoping sequences, or cyclic prefixes which result in built-in periodicity. Even
though the data is a stationary random process, we can characterize these
modulated signals as cyclostationary, since their statistics, mean and
autocorrelation, exhibit periodicity. We can detect this feature by analyzing a
spectral correlation function. The main advantage of feature detection is its
robustness to uncertainty in noise power. However, it is computationally
complex and requires significantly long observation times.
When the CR system utilizes an energy detection scheme, sensing threshold
will be a very important parameter in determining the system performance. In
practice, selecting a suitable sensing threshold will optimize the cognitive radio
system performance.
Very sensitive detectors (detectors with very low threshold) will have high
false alarm probability because it can interpret noise as a valid signal. On the other
hand, ‘deaf’ detectors (detectors with very high threshold) can cause the cognitive
radio (secondary user) to transmit even though the primary user is accessing the
channel/spectrum. This may severely harm the primary users, i.e. large interference
causing throughput degradation, and is not desirable in cognitive radio system. In
short, the value of sensing threshold determines the tradeoff between the probability
of missed detection and the probability of false alarm.
Examples of works in the area of sensing threshold include [12] and [13]. In
[12], Choi et al. proposed a novel method to determine the sensing threshold in the
cognitive radio system, in which the secondary user first decides its transmission
power for the communication and then decides the sensing threshold for the
coexistence with the primary user. For the coexistence, the secondary user controls its
sensing threshold adaptively according to its transmission power in order to guarantee
the minimum decodable SINR (Signal-to-Interference-plus-Noise Ratio) for the
primary receiver. In [13], Zhu et al. employed a double threshold method in energy
detector to perform spectrum sensing, while a fusion center in the cognitive radio
network collects the local decisions and observational values of the secondary users,
9
and then makes the final decision to determine whether the primary user is absence or
not.
Due to the lack of interactions between primary users and CR users,
transmitter detection techniques rely only on weak signals from the primary
transmitters. Hence, transmitter detection techniques alone cannot avoid interference
to primary receivers because of the lack of primary receiver information. Moreover,
transmitter detection models cannot prevent the hidden terminal problem. A CR user
(transmitter) can have a good line of sight to a CR receiver but may not be able to
detect the primary transmitter due to shadowing. One way to increase the reliability of
detecting the presence of primary transmissions is by collaborative detection, i.e.
cooperative detection between many cognitive radio users [10][11][18].
Cooperative detection is theoretically more accurate because it can minimize
the uncertainty in a single user’s detection through collaboration. Moreover, it can
mitigate multi-path fading and shadowing effects, consequently improve the detection
probability in a heavily shadowed environment. However, the drawback on
cooperative approaches is that it will generate more overhead traffic required for
cooperation. This is undesirable in resource-constrained networks. Another benefit of
this cooperation is the increase in CR systems agility because less detection time is
needed [18].
Unnikrishnan et al. [10] quantified the advantages of collaborative sensing by
taking into account the correlation between nodes. Ganesan et al. [11] captured the
benefits of cooperative sensing in terms of reduced detection time and increase in the
overall agility.
Previous work in [3], which forms the basis of this thesis work, is an
exemplary work regarding the performance of primary transmitter detection. Zander
[3] investigated the performance of spectrum sensing in cognitive radio systems by
specifically considering outdoor environments and assuming realistic propagation
models, while also comparing different sensing and resource management strategies.
Although cooperative detection reduces the probability of interference, the
most efficient way to detect spectrum holes is to detect the primary users that are
receiving data within the communication range of a CR user. Usually, one can exploit
the local oscillator (LO) leakage power emitted by the RF (Radio Frequency) front-
end of the primary receiver [17][18]. However, because the LO leakage signal is
typically weak, implementation of a reliable detector is not trivial. Currently, this
10
method is only feasible in the detection of TV (television) receivers [17]. Another
example where this method is feasible can be in a two-way system where it is possible
to detect the signals of the receiver. This is obviously more complex and requires the
knowledge about primary user protocols (e.g. modulation type, pulse shaping, packet
format) in order to work.
Usually, one can control interference at the transmitter through the radiated
power and location of individual transmitters. However, interference actually takes
place at the receivers. Therefore, FCC has recently introduced a new model for
measuring interference, referred to as interference temperature management. This
model limits the interference at the receiver through a so-called interference
temperature limit, which is the amount of new interference the receiver could tolerate.
As long as CR users do not exceed this limit, they can use the spectrum band.
Although this model is the best fit for the objective of spectrum sensing, the difficulty
of this model lies in accurately determining the interference temperature limit [17].
Future development on spectrum sensing techniques must include
investigation on several open research challenges [17]:
• Interference temperature measurement: Due to the lack of interactions
between primary networks and CR networks, generally a CR user cannot be
aware of the precise locations of the primary receivers. Thus, new techniques
are required to measure or estimate the interference temperature at nearby
primary receivers.
• Spectrum sensing in multi-user networks: The multi-user environment,
consisting of multiple CR users and primary users, makes it more difficult to
sense spectrum holes and estimate interference. Hence, in developing
spectrum-sensing functions one should also consider the multi-user
environment.
• Spectrum-efficient sensing: In general, CR systems cannot perform sensing
while transmitting packets, i.e. deciding whether to attempt transmission or
not will depend on the sensing result. Hence, CR users should stop
transmitting while sensing, which decreases spectrum efficiency. For this
reason, balancing spectrum efficiency and sensing accuracy is an important
issue. Moreover, because sensing time directly affects transmission

11
performance, it is favorable to develop novel spectrum sensing algorithms to
minimize the sensing time within a given sensing accuracy.
In this work, we will only focus ourselves on a rather simplified (and
idealized) version of energy detector. The detector will sense the power emanated
from the primary transmitter, and the power sensing are also considered to be ideal,
that is the detector is able to detect any signal with received power larger than the
sensing threshold without any misses or false alarms.
1.3.3 Spectrum Sharing
The shared nature of the wireless channel requires the coordination of
transmission attempts or access to the channel between CR users. The unique
characteristics of CRs, such as the coexistence of CR users with licensed users and the
wide range of available spectrum, result in substantially different challenges for
spectrum sharing in CR networks. To address these challenges, Akyildiz et al. [17]
have classified four aspects regarding the existing work in spectrum sharing: the
architecture, spectrum allocation behavior, spectrum access technique, and scope.
Based on the architecture, one can categorize spectrum sharing as a centralized
or distributed mechanism.
• Centralized spectrum sharing: Here a central entity controls the spectrum
allocation and access procedures. Moreover, the system can use a distributed
sensing procedure to forward spectrum allocation measurements to the central
entity, and a spectrum allocation map is constructed. Furthermore, the central
entity can lease spectrum to users in a limited geographical region for a
specific amount of time. In addition to competition for the spectrum, one can
also consider competition for users through a central spectrum policy server.
• Distributed spectrum sharing: Here each node performs spectrum allocation
and access based on local (or possibly global) policies in a distributed manner.
Different networks are also using distributed solutions such that a base station
(BS) competes with its interferer BSs according to the QoS requirements of its
users to allocate a portion of the spectrum.
12
Comparison of centralized and distributed solutions reveals that distributed
solutions generally closely follow the centralized solutions, but at the cost of message
exchanges between nodes [17].
Based on spectrum allocation behavior, spectrum sharing can be cooperative
or non-cooperative.
• Cooperative spectrum sharing: Cooperative (or collaborative) solutions
exploit the interference measurements of each node such that the effect of the
communication of one node on other nodes is considered. A common
technique used in these schemes is forming clusters to share interference
information locally. This localized operation provides an effective balance
between a fully centralized and a distributed scheme.
• Non-cooperative spectrum sharing: Only a single node is considered in non-
cooperative (or non-collaborative, selfish) solutions. Because interference in
other CR nodes is not considered, non-cooperative solutions may result in
reduced spectrum utilization. However, these solutions do not require frequent
message exchanges between neighbors as in cooperative solutions.
Cooperative approaches generally outperform non-cooperative approaches, as
well as closely approximating the global optimum. Moreover, cooperative techniques
result in a certain degree of fairness, as well as improved throughput. On the other
hand, the performance degradation of non-cooperative approaches are generally offset
by the significantly low information exchange and hence, energy consumption.
Based on the spectrum access technique, one can share the spectrum using an
overlay or underlay technique.
• Overlay spectrum sharing: Nodes access the network using a portion of the
spectrum that is currently idle, due to the licensed users not using that specific
portion of the spectrum. This minimizes interference to the primary network.
• Underlay spectrum sharing: Exploiting the spread spectrum techniques such
that licensed users regard the transmission of a CR node as noise.
Underlay techniques can utilize higher bandwidth at the cost of a slight
increase in complexity. Considering this trade-off, one can consider hybrid techniques
for the spectrum access technology for CR networks [17].
13
Examples of works in the area of overlay spectrum sharing include [4] – [6].
Srinivasa et al. [4][5] presented a theoretical perspective on the throughput potential
of cognitive radio. Here the authors summarize different cognitive radio techniques
that underlay and overlay the transmissions of the cognitive (secondary) user with
those of the primary users. They describe recently proposed models for cognitive
radios based on the overlay technique, and also present a ‘two-switch’ cognitive radio
model and develop inner and outer bounds on the secondary radio capacity for the
interference avoidance technique. Using the two-switch model, they investigate the
inherent tradeoff between the sensitivity of primary detection and the cognitive link
capacity. Additionally, they also compare the throughputs achieved by the secondary
user in the different models with numerical results. Notable results include the
relation between average throughput and sensing radius for the interference avoidance
technique, and throughput as a function of secondary transmit power. In [5], the
authors also present the design challenges and limitations for interference avoidance
approach, as well as a simple example to answer a fundamental question in spectrum
sharing, i.e. how much licensing is optimal. In [6], the same authors have also done
some more work on the interference avoidance technique. In [6] the focus is on the
temporal aspects of secondary usage where the communication channel is an “on-off”
model, allowing secondary communication whenever the primary user is in off state,
irrespective of the relative location of the secondary.
Finally, the focus of spectrum-sharing techniques generally revolves around
two scopes: spectrum sharing inside a CR network (intra-network spectrum sharing)
and among multiple coexisting CR networks (inter-network spectrum sharing), as
explained in the following:
• Intra-network spectrum sharing: These solutions focus on spectrum allocation
between the entities of a CR network. Accordingly, the users of a CR network
try to access the available spectrum without causing interference to the
primary users. Previously, wireless communication systems have not yet
consider the unique challenges posed by intra-network spectrum sharing.
• Inter-network spectrum sharing: By exploiting the CR architecture, we are
able to deploy multiple systems in overlapping locations and spectrum. So far,
the inter-network spectrum sharing solutions provide a broader view of the
spectrum-sharing concept by including certain operator policies [17].
14
In an effort to accelerate the implementation of spectrum sharing, Peha [2]
outlined the approaches to spectrum sharing. Here the author describes the two
extremes on how to treat frequency spectrum, i.e. the “property rights” and the
“spectrum commons” model. Further, this article presents concepts underlying the
“property” and “commons” debate, clarifies options for spectrum reform, and
describes trade-offs. The author also proposes a policy options for spectrum sharing.
As in the case of spectrum sensing, there are still many open research issues
for the realization of efficient and seamless open spectrum sharing operation in CR
networks, such as [17]:
• Common control channel: A common control channel (CCC) facilitates much
spectrum-sharing functionality. However, since a secondary user must vacate
a channel when a primary user chooses to use it, implementation of a fixed
CCC is not feasible. Moreover, in CR networks a channel common to all users
is highly dependent on topology and varies over time. Consequently, it is
preferable to devise CCC mitigation techniques or exploit local CCCs for
clusters of nodes.
• Dynamic radio range: Due to the interdependency between radio range and
operating frequency, the neighbors of a node may change as the operating
frequency changes. So far, there is no work addressing this important
challenge in CR networks, and the authors in [17] advocate frequency-aware
spectrum sharing techniques.
• Spectrum unit: Almost all spectrum decision and sharing techniques consider a
channel as the basic spectrum unit. Hence, the definition of a channel as a
spectrum unit is crucial in developing algorithms.
• Location information: An important assumption in the existing works is that
secondary users know the location and transmit power of primary users so that
they can easily perform interference calculations. However, such an
assumption may not always be valid in CR networks.
1.3.4. Power Control
Since each cognitive radio operates in a decentralized manner and each radio’s
power allocation is a source of interference for other radios sharing the same
15
spectrum, some alternative means must be found to implement control over the
transmit power [18].
Notable works in CR power control include [8] and [9]. Srinivasa et al. [8]
used a more realistic model of the interference using distance dependence and
Rayleigh-fading. They also proposed an algorithm to adapt the secondary user
transmitting power to avoid interference at the primary user. Here the authors
consider a cognitive radio system where the secondary transmitter varies the transmit
power based on all the information available from the spectrum sensor. The secondary
user peak transmitting power constraint and an average interference constraint at the
primary receiver govern its operation. Without restricting the sensing scheme (total
received energy, or correlation etc), they characterize the power adaptation strategies
that maximize the secondary user’s SNR and capacity. For another work on power
control in cognitive radio systems based on spectrum sensing, one can also look at [9].
Hamdi et al. [9] developed a power control approach to allow the cognitive radio to
operate in the presence of the primary user. In order to minimize the interference to
the licensed user, the transmit power of the cognitive radio is controlled by using the
side information of spectrum sensing. The proposed approach can guarantee the
quality of service for the primary in the presence of the cognitive radio.
1.4 Problem definition
In this thesis work, we will try to assess the feasibility of opportunistic access
in indoor environments. By means of simulations, we are aiming to quantify access
opportunities in terms of secondary user successful transmission probabilities.
We want to find an answer to the question: “How much reuse opportunity can
be detected by a sensing strategy in an indoor environment?” and “Will there be more
reuse opportunity to exploit if different transmitter-receiver placement are used?” The
question arises because in an indoor environment, walls and floors will cause more
attenuation compared to the outdoor environment, so there should be more reuse
opportunity in an indoor environment. Consequently, even a simple sensing scheme
can detect more opportunity in an indoor environment. Further, by using smarter
(ideal) sensing scheme exploiting power detection, we will try to find whether there
can be an improvement in detecting and utilizing reuse opportunities in indoor
environments.
16
In other words, we are aiming to improve the detection and utilization of reuse
opportunities when a primary transmission is present in the close vicinity. We can
further decompose this thought into three distinct questions:
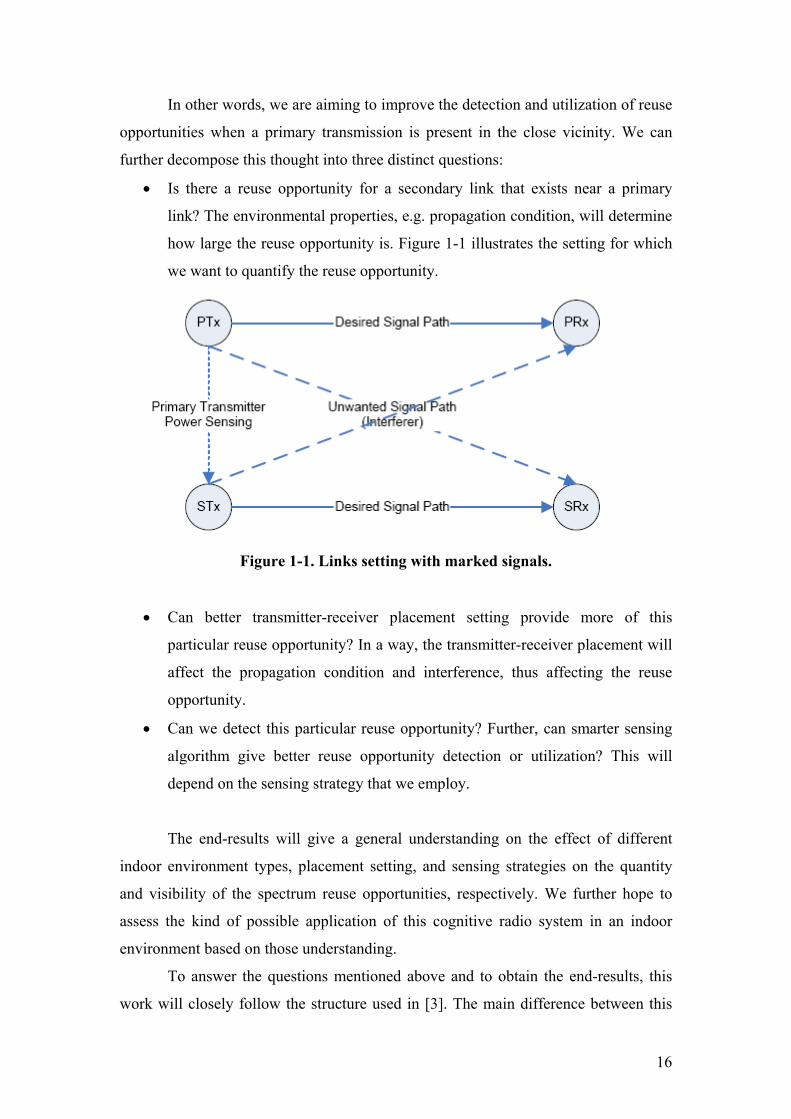
• Is there a reuse opportunity for a secondary link that exists near a primary
link? The environmental properties, e.g. propagation condition, will determine
how large the reuse opportunity is. Figure 1-1 illustrates the setting for which
we want to quantify the reuse opportunity.
Figure 1-1. Links setting with marked signals.
• Can better transmitter-receiver placement setting provide more of this
particular reuse opportunity? In a way, the transmitter-receiver placement will
affect the propagation condition and interference, thus affecting the reuse
opportunity.
• Can we detect this particular reuse opportunity? Further, can smarter sensing
algorithm give better reuse opportunity detection or utilization? This will
depend on the sensing strategy that we employ.
The end-results will give a general understanding on the effect of different
indoor environment types, placement setting, and sensing strategies on the quantity
and visibility of the spectrum reuse opportunities, respectively. We further hope to
assess the kind of possible application of this cognitive radio system in an indoor
environment based on those understanding.
To answer the questions mentioned above and to obtain the end-results, this
work will closely follow the structure used in [3]. The main difference between this
17
work and [3] is that this work will focus on the indoor environments whereas [3]
focused on the outdoor environments. We note the similarities between this work and
the work in [3]:
a. This work also uses power-based primary transmitter detection with different
pre-determined single sensing threshold (an idealized version of primary
transmitter energy detection [7]).
b. This work also uses the same various sensing strategies with distributed power
control scheme applied in some cases.
Investigating how different transmitter-receiver placement setting may affect the
reuse opportunity is a new contribution of this thesis work.
1.5 Research method
For this thesis work, it is imperative to do a simulation that can represent the
“real life” condition as close as possible. This thesis work will follow the method and
approach used in [3], albeit with some adjustment since this work will focus on indoor
environments. In a synthetic indoor environment, we randomly generate two identical
primary and secondary systems (both consist of their respective primary and
secondary transmitter and receiver). To answer the questions stated in the problem
definition, we will want to look at the case where a primary link is active during the
sensing process of the secondary transmitter. By employing different sensing
schemes, we are interested in the successful transmission of both the primary and
secondary links, marked when both links achieve their required SINR. The limiting
value of this success probability corresponds to the actual reuse opportunities, thereby
providing an attempt to answer the earlier question(s) stated in the problem definition.
The use of a representative indoor propagation model is important to give a realistic
account of the required SINR calculation, which will give a coarse estimation on how
much overall reuse opportunity is available. We will describe the details of the
simulation in Chapter 3 of this report.
1.6 Thesis outline
This report is consisted of four chapters. The content of each chapter will be as
follows:
18
• Chapter 1: Introduction
This chapter will inform the reader about the background of the thesis work,
the aim of the work, related works, problem definition, research method, and
the thesis outline.
• Chapter 2: Simulation Model
This chapter will describe the system model, indoor propagation model,
various sensing strategies and placement settings, the performance measures
used, assumptions made for and used in the simulation, and the simulation
chain or path of the simulation in general.
• Chapter 3: Simulation Results and Analysis
This chapter will provide simulation results and the analysis/discussion for
each result, i.e. providing possible explanation for important simulation
outcome.
• Chapter 4: Conclusion and Future Work
This chapter will contain the conclusion of the thesis work, specifically about
the simulation results. Some suggestions of possible future works regarding
the same field/subject will also be available here.

19
CHAPTER 2
MODELS
2.1 System model We consider a generic type of wireless system where both the primary and
secondary systems are identical in terms of carrier frequency, bandwidth, and
maximum transmit power. For simplicity, we assume that all transmission activities
take place on a single “channel”. Before transmitting, the secondary user will perform
sensing to detect the presence of an eventual primary signal. Here we will only look
on a power sensing approach, based on the assumption that the secondary transmitter
or cognitive radio has no knowledge whatsoever regarding the primary user signal at
both PHY and MAC layers, e.g. modulation type, pulse shaping, packet format.
Furthermore, the power sensing are also considered to be ideal, that is the detector is
able to detect any signal with received power larger than the sensing threshold
without any misses or false alarms.
If there are no primary transmissions, the sensing process will result in an
empty channel, which allows successful secondary transmission. However, we want
to look at the case where a primary link is active during the sensing process. Here the
aim is to measure the ability of the secondary user to detect spectrum opportunities.
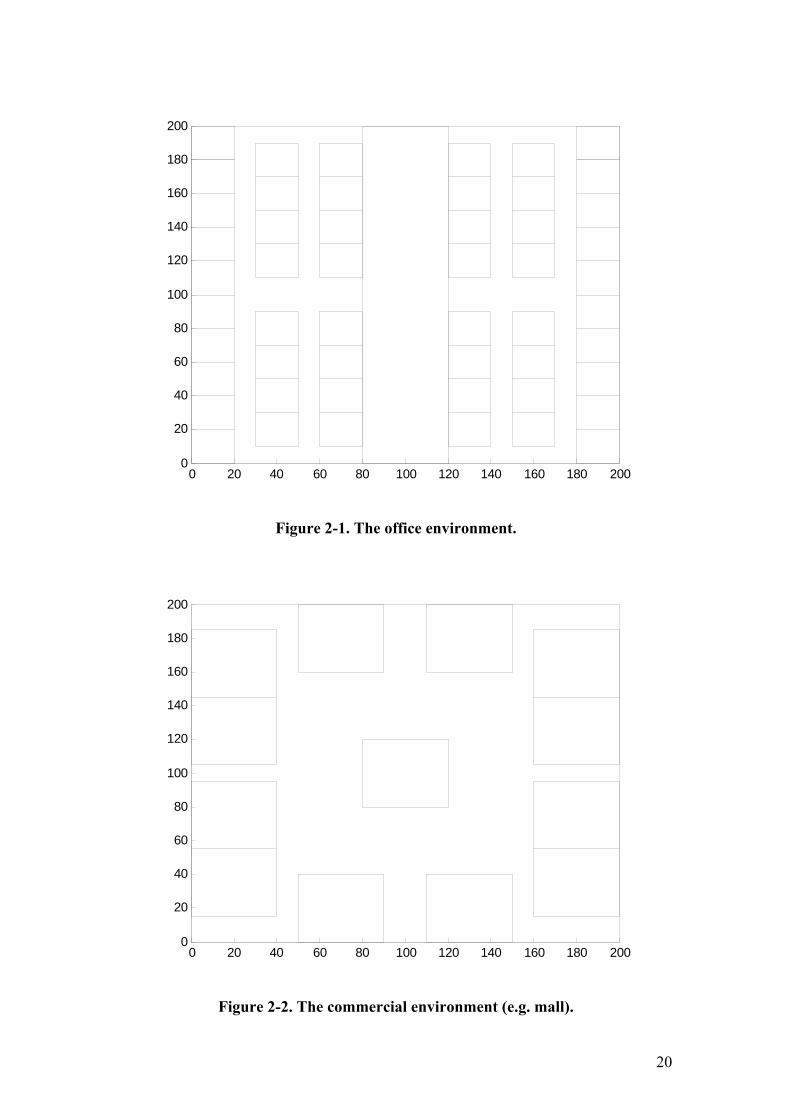
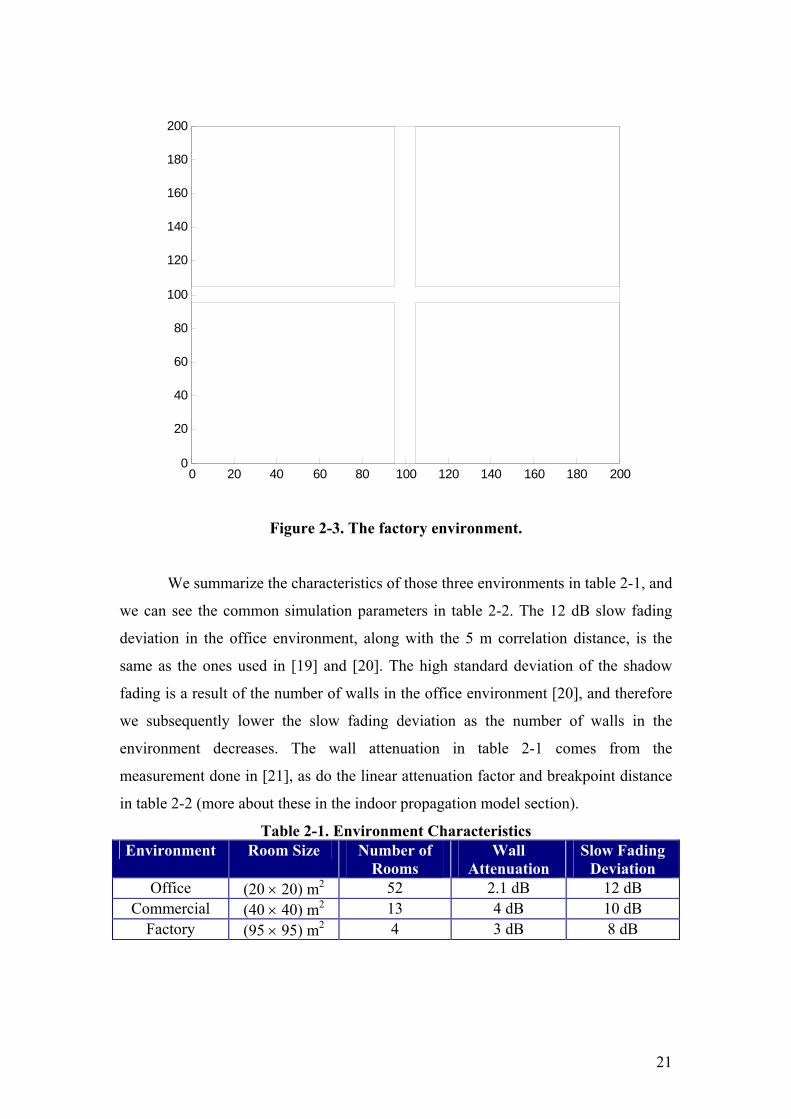
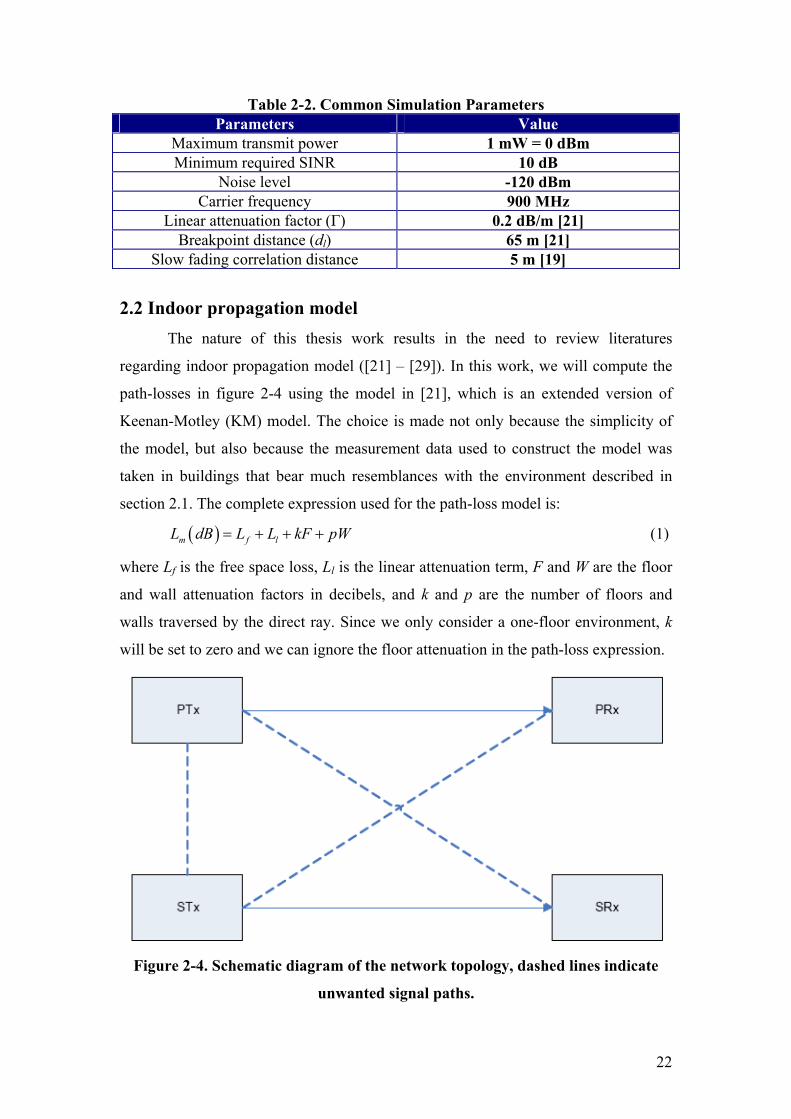
The different environment types (e.g. residential/office, commercial, or
industrial) will mainly be characterized by the number of corridors/alleys in the
square, consequently affecting the number of walls in the environment. For numerical
experiments, we will use a square environment of 200 × 200 m with a grid resolution
of 20 m. We will describe the primary and secondary transmitter-receiver placement
setting with more detail in the later section of this chapter. Figures 2-1 until 2-3 depict
the sketches of different environment type.
20
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Figure 2-1. The office environment.
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Figure 2-2. The commercial environment (e.g. mall).
21
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
Figure 2-3. The factory environment.
We summarize the characteristics of those three environments in table 2-1, and
we can see the common simulation parameters in table 2-2. The 12 dB slow fading
deviation in the office environment, along with the 5 m correlation distance, is the
same as the ones used in [19] and [20]. The high standard deviation of the shadow
fading is a result of the number of walls in the office environment [20], and therefore
we subsequently lower the slow fading deviation as the number of walls in the
environment decreases. The wall attenuation in table 2-1 comes from the
measurement done in [21], as do the linear attenuation factor and breakpoint distance
in table 2-2 (more about these in the indoor propagation model section).
Table 2-1. Environment Characteristics Environment Room Size Number of
Rooms Wall
Attenuation Slow Fading
Deviation Office (20 × 20) m2 52 2.1 dB 12 dB
Commercial (40 × 40) m2 13 4 dB 10 dB Factory (95 × 95) m2 4 3 dB 8 dB
22
Table 2-2. Common Simulation Parameters Parameters Value
Maximum transmit power 1 mW = 0 dBm Minimum required SINR 10 dB
Noise level -120 dBm Carrier frequency 900 MHz
Linear attenuation factor (Γ) 0.2 dB/m [21] Breakpoint distance (dl) 65 m [21]
Slow fading correlation distance 5 m [19]
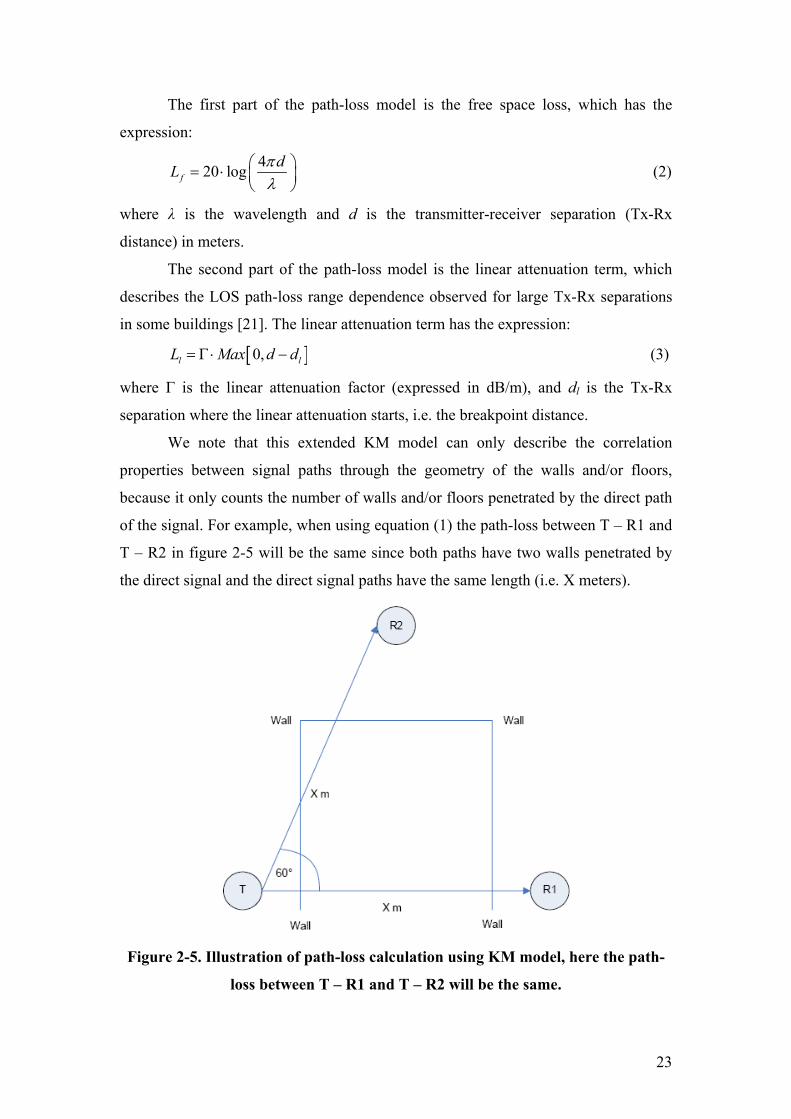
2.2 Indoor propagation model The nature of this thesis work results in the need to review literatures
regarding indoor propagation model ([21] – [29]). In this work, we will compute the
path-losses in figure 2-4 using the model in [21], which is an extended version of
Keenan-Motley (KM) model. The choice is made not only because the simplicity of
the model, but also because the measurement data used to construct the model was
taken in buildings that bear much resemblances with the environment described in
section 2.1. The complete expression used for the path-loss model is:
( )m f lL dB L L kF pW= + + + (1)
where Lf is the free space loss, Ll is the linear attenuation term, F and W are the floor
and wall attenuation factors in decibels, and k and p are the number of floors and
walls traversed by the direct ray. Since we only consider a one-floor environment, k
will be set to zero and we can ignore the floor attenuation in the path-loss expression.
Figure 2-4. Schematic diagram of the network topology, dashed lines indicate
unwanted signal paths.
23
The first part of the path-loss model is the free space loss, which has the
expression:
420 logfdL π
λ⎛ ⎞= ⋅ ⎜ ⎟⎝ ⎠
(2)
where λ is the wavelength and d is the transmitter-receiver separation (Tx-Rx
distance) in meters.
The second part of the path-loss model is the linear attenuation term, which
describes the LOS path-loss range dependence observed for large Tx-Rx separations
in some buildings [21]. The linear attenuation term has the expression:
[ ]0,l lL Max d d= Γ ⋅ − (3)
where Γ is the linear attenuation factor (expressed in dB/m), and dl is the Tx-Rx
separation where the linear attenuation starts, i.e. the breakpoint distance.
We note that this extended KM model can only describe the correlation
properties between signal paths through the geometry of the walls and/or floors,
because it only counts the number of walls and/or floors penetrated by the direct path
of the signal. For example, when using equation (1) the path-loss between T – R1 and
T – R2 in figure 2-5 will be the same since both paths have two walls penetrated by
the direct signal and the direct signal paths have the same length (i.e. X meters).
Figure 2-5. Illustration of path-loss calculation using KM model, here the path-
loss between T – R1 and T – R2 will be the same.

24
For a better representation of the indoor propagation, we add a shadow fading
process to the propagation model. We can model the shadow fading process in
different ways. The work in [20] uses a simple propagation model where the shadow
fading process is uncorrelated. Another work in [19] regarded the shadow fading as a
correlated process with a certain correlation distance.
We think that a correlated shadow fading process is more realistic since the
shadow fading for the same radio link at the nearby locations will not change very
much. Further, for the radio links that has similar propagation path, the shadow fading
experienced by each of them will not have much difference either [30]. To take into
account this correlation property, we use a rather simplified model of a correlation
filter to filter the uncorrelated fading process. We use the following autoregressive
filter model:
( )2
11
1
1
d
d
eH ze z
−
− −
−=
⎛ ⎞− ⎜ ⎟⎝ ⎠
(4)
The filter will produce an exponentially correlated fading process with e-1 decay at the
correlation distance d (the autocorrelation function of the fading process decays to e-1
of the maximum after a correlation distance of d) [31].
Therefore, the final propagation model that we use is:
( ) ( )m f lL dB L L pW h s= + + + (5)
where s is an uncorrelated lognormal distribution fading process with mean 0 and
standard deviation σ (see table 3-1), and h(s) is the correlated fading process as result
of the filtering.
2.3 Sensing and spectrum access strategies
Here we are not interested in the implementation detail; hence, we will assume
that all secondary transmitters can perform ideal power sensing with threshold κ, i.e.
the detector is able to detect any signal with received power larger than κ without any
misses or false alarms. If the secondary transmitter senses the channel to be clear, i.e.
the received power is below the sensing threshold, it will begin transmission attempt.
Finally, we also assume that the secondary transmitter knows the path-loss of STx –
SRx, and all other path gains are unknown. We will compare the performance of the
four following sensing strategies [3]:
25
A. Transmitter sensing – silent receiver (TX sensing)
Here the secondary transmitter has no knowledge regarding the presence of
the primary receiver. The secondary transmitter senses the channel and if it is
unable to detect the primary transmitter on the path PTx – STx it will start
transmission attempt. We will consider constant transmit power and an
adjusted transmit power mode that will result in the SNR at the secondary
receiver to be kγ0S in the absence of primary transmitter interference, where k
is the interference margin and γ0S is the minimum required SNR at the
secondary receiver.
B. Transmitter and receiver sensing (TX&RX sensing)
Here we assume that the secondary transmitter is able to detect the primary
receiver whenever propagation conditions allow the detection to happen, e.g.
by sensing return channel traffic such as CTS (clear-to-send) signal. The
secondary transmitter will not attempt transmission if it senses activity in
either the PTx – STx path or PRx – STx path, i.e. it will not use the channel.
We also consider two transmit power as mentioned in strategy A.
C. Responsive system, both transmitters using distributed power control (DPC)
In the previous cases, the primary system cannot mitigate the effect of
increased interference from the secondary transmitter, and vice versa. Here we
assume that both the primary and secondary transmitters adjust their power
according to a distributed power control (DPC) scheme. We assume success in
accessing channel if there exists a power setting (within the maximum power
limits) such that both the primary and secondary link achieve their respective
SINR target [32].
D. Collaborative sensing
Here the secondary transmitter gets additional sensing information from N
other cognitive radios in the network. We will model these as uniformly
distributed over the square using the same sensing threshold as the secondary
transmitter. If none of these devices detects any signal above the threshold
then the secondary user will attempt to access the channel (again considering
two transmit power as in strategy A and B).
26
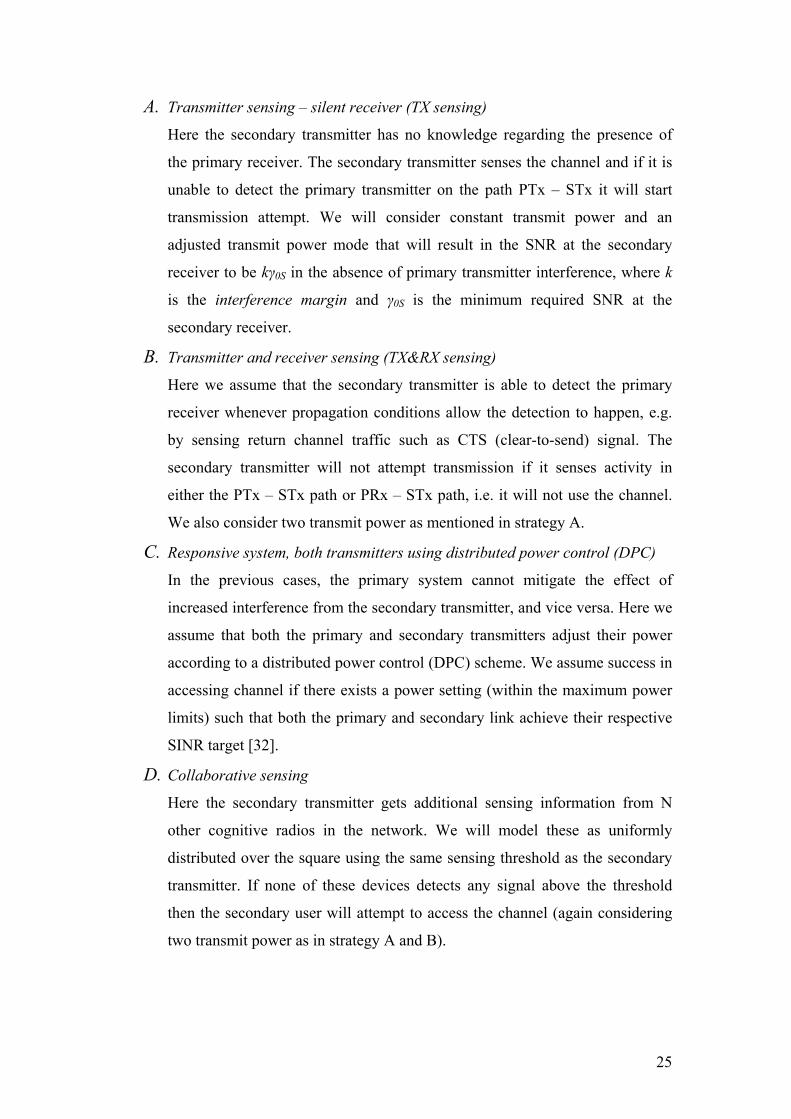
Figure 2-6 illustrates the sensing strategies A and B.
Figure 2-6. A) Transmitter sensing and silent receiver, B) Transmitter and
receiver sensing.
A good sensing scheme enables the secondary transmitter to maintain a low
missed detection probability, i.e. the probability in not detecting the primary users.
This is important to avoid unwanted interference because the secondary transmitters
are not aware that the primary user is active in a particular spectrum segment.
2.4 Placement settings
We will compare different Tx – Rx placement setting to see how it will affect
the reuse opportunities in the indoor environment. We will compare the following
placement setting:
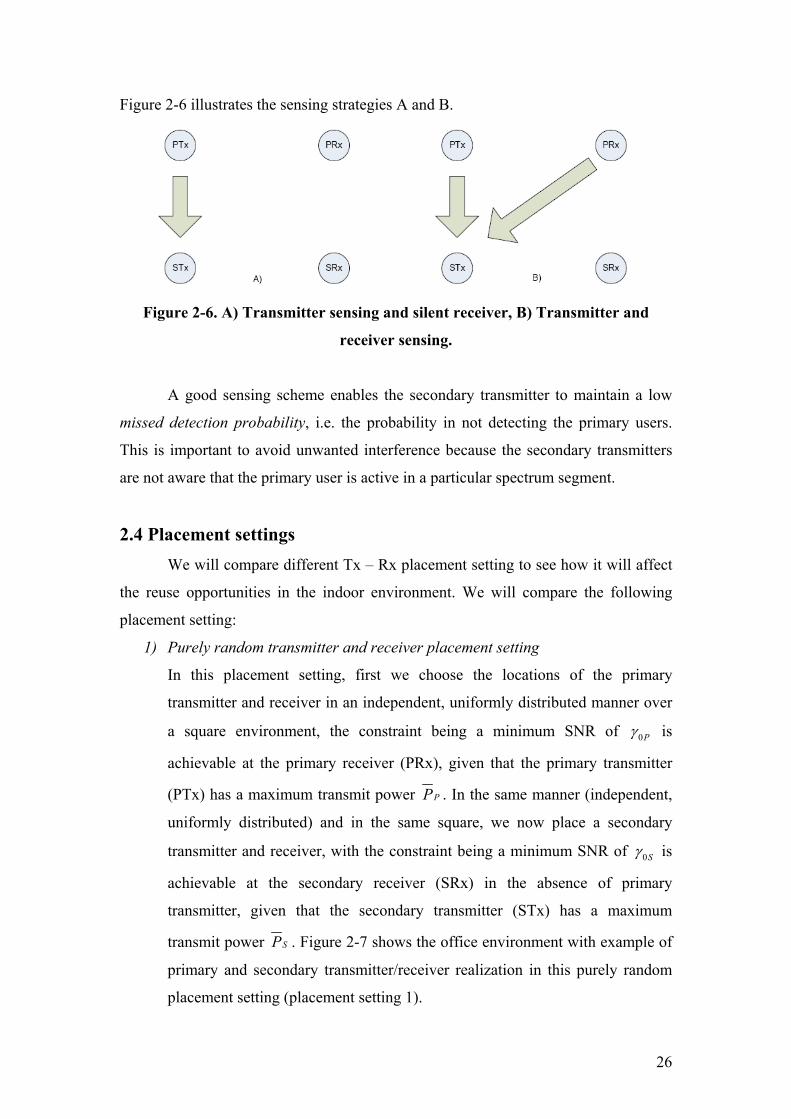
1) Purely random transmitter and receiver placement setting
In this placement setting, first we choose the locations of the primary
transmitter and receiver in an independent, uniformly distributed manner over
a square environment, the constraint being a minimum SNR of 0Pγ is
achievable at the primary receiver (PRx), given that the primary transmitter
(PTx) has a maximum transmit power PP . In the same manner (independent,
uniformly distributed) and in the same square, we now place a secondary
transmitter and receiver, with the constraint being a minimum SNR of 0Sγ is
achievable at the secondary receiver (SRx) in the absence of primary
transmitter, given that the secondary transmitter (STx) has a maximum
transmit power SP . Figure 2-7 shows the office environment with example of
primary and secondary transmitter/receiver realization in this purely random
placement setting (placement setting 1).
27
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200PTx-PRxSTx-SRxPTx-SRxSTx-PRxPTx-STx
Figure 2-7. Example of uniformly distributed transmitter/receiver placement in
the office environment.
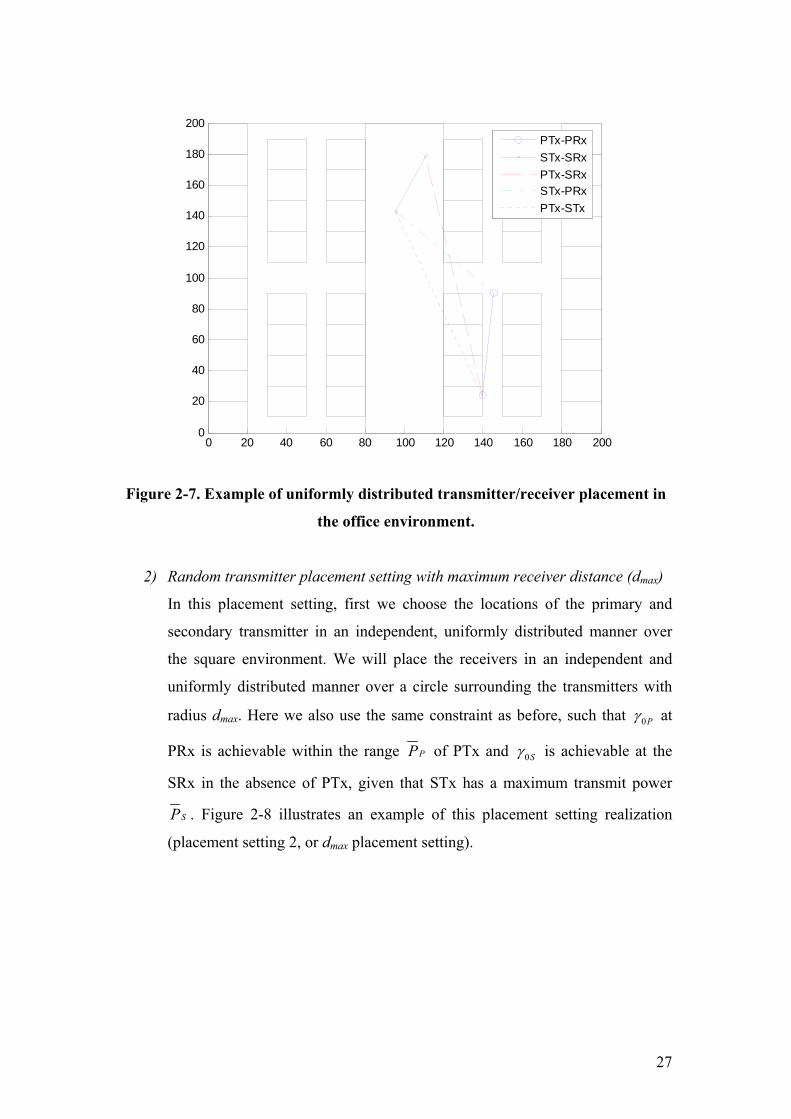
2) Random transmitter placement setting with maximum receiver distance (dmax)
In this placement setting, first we choose the locations of the primary and
secondary transmitter in an independent, uniformly distributed manner over
the square environment. We will place the receivers in an independent and
uniformly distributed manner over a circle surrounding the transmitters with
radius dmax. Here we also use the same constraint as before, such that 0Pγ at
PRx is achievable within the range PP of PTx and 0Sγ is achievable at the
SRx in the absence of PTx, given that STx has a maximum transmit power
SP . Figure 2-8 illustrates an example of this placement setting realization
(placement setting 2, or dmax placement setting).
28
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200
PTx-PRxSTx-SRxPTx-SRxSTx-PRxPTx-STx
dmax
dmax
Figure 2-8. Office environment with example of primary and secondary
transmitter/receiver realization using a placement setting 2).
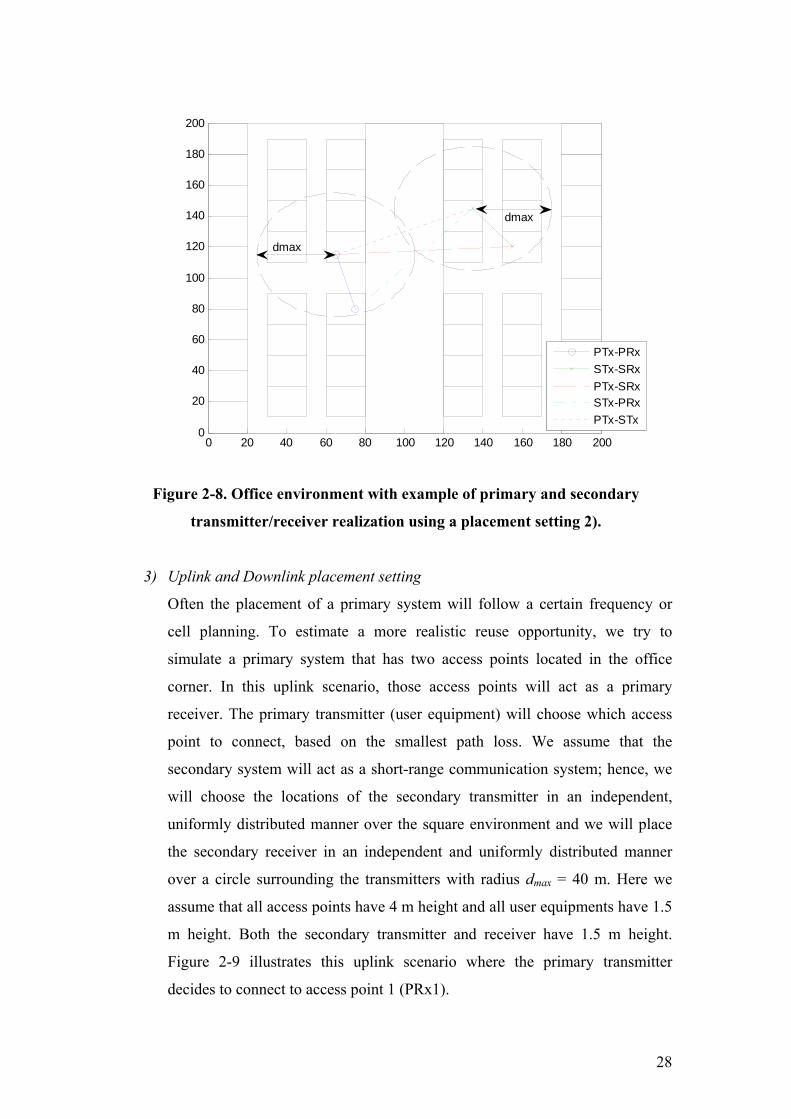
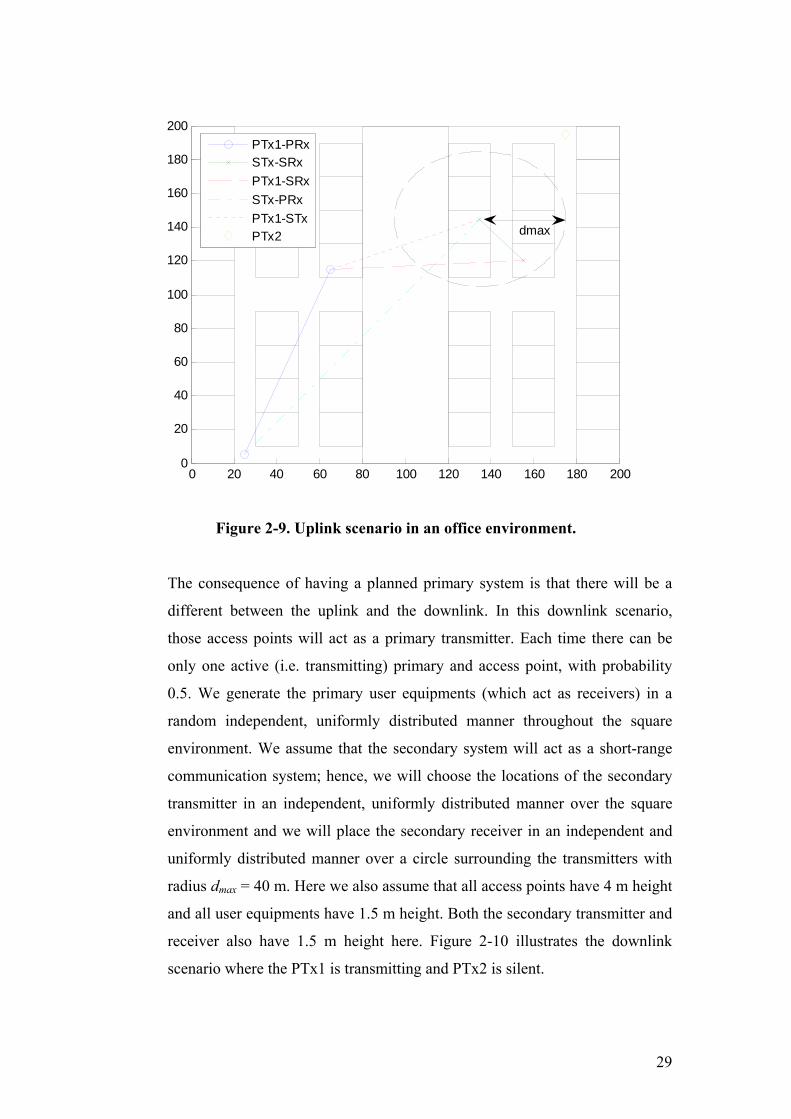
3) Uplink and Downlink placement setting
Often the placement of a primary system will follow a certain frequency or
cell planning. To estimate a more realistic reuse opportunity, we try to
simulate a primary system that has two access points located in the office
corner. In this uplink scenario, those access points will act as a primary
receiver. The primary transmitter (user equipment) will choose which access
point to connect, based on the smallest path loss. We assume that the
secondary system will act as a short-range communication system; hence, we
will choose the locations of the secondary transmitter in an independent,
uniformly distributed manner over the square environment and we will place
the secondary receiver in an independent and uniformly distributed manner
over a circle surrounding the transmitters with radius dmax = 40 m. Here we
assume that all access points have 4 m height and all user equipments have 1.5
m height. Both the secondary transmitter and receiver have 1.5 m height.
Figure 2-9 illustrates this uplink scenario where the primary transmitter
decides to connect to access point 1 (PRx1).
29
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200PTx1-PRxSTx-SRxPTx1-SRxSTx-PRxPTx1-STxPTx2 dmax
Figure 2-9. Uplink scenario in an office environment.
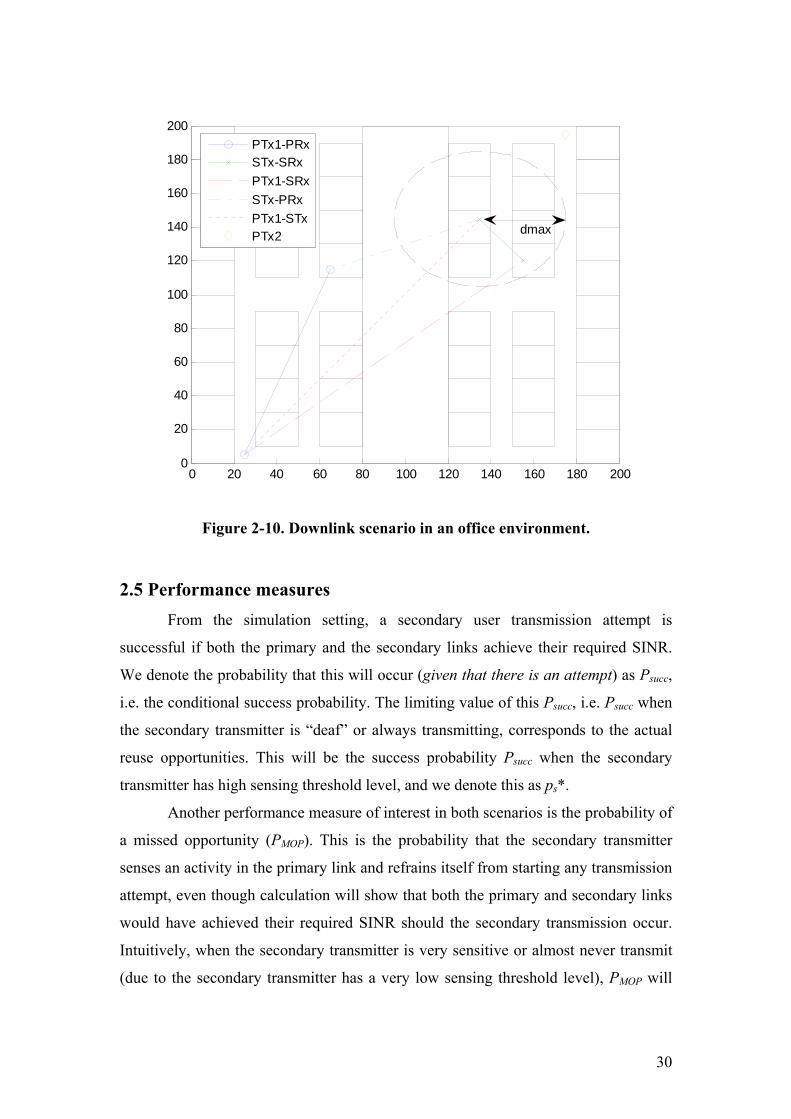
The consequence of having a planned primary system is that there will be a
different between the uplink and the downlink. In this downlink scenario,
those access points will act as a primary transmitter. Each time there can be
only one active (i.e. transmitting) primary and access point, with probability
0.5. We generate the primary user equipments (which act as receivers) in a
random independent, uniformly distributed manner throughout the square
environment. We assume that the secondary system will act as a short-range
communication system; hence, we will choose the locations of the secondary
transmitter in an independent, uniformly distributed manner over the square
environment and we will place the secondary receiver in an independent and
uniformly distributed manner over a circle surrounding the transmitters with
radius dmax = 40 m. Here we also assume that all access points have 4 m height
and all user equipments have 1.5 m height. Both the secondary transmitter and
receiver also have 1.5 m height here. Figure 2-10 illustrates the downlink
scenario where the PTx1 is transmitting and PTx2 is silent.
30
0 20 40 60 80 100 120 140 160 180 2000
20
40
60
80
100
120
140
160
180
200PTx1-PRxSTx-SRxPTx1-SRxSTx-PRxPTx1-STxPTx2 dmax
Figure 2-10. Downlink scenario in an office environment.
2.5 Performance measures
From the simulation setting, a secondary user transmission attempt is
successful if both the primary and the secondary links achieve their required SINR.
We denote the probability that this will occur (given that there is an attempt) as Psucc,
i.e. the conditional success probability. The limiting value of this Psucc, i.e. Psucc when
the secondary transmitter is “deaf” or always transmitting, corresponds to the actual
reuse opportunities. This will be the success probability Psucc when the secondary
transmitter has high sensing threshold level, and we denote this as ps*.
Another performance measure of interest in both scenarios is the probability of
a missed opportunity (PMOP). This is the probability that the secondary transmitter
senses an activity in the primary link and refrains itself from starting any transmission
attempt, even though calculation will show that both the primary and secondary links
would have achieved their required SINR should the secondary transmission occur.
Intuitively, when the secondary transmitter is very sensitive or almost never transmit
(due to the secondary transmitter has a very low sensing threshold level), PMOP will
31
converge to ps*, since at this condition all reuse opportunity will be a missed
opportunity.
Since we are interested in exploring the role of sensing strategy in detecting
reuse opportunities, the probability of finding a “clear” channel, i.e. not sensing the
primary transmitter (Pclear), can also be a performance measure of interest. The value
of Pclear can help determine the actual success probability, which will be lower than
Psucc, since Psucc is conditional success probability given that the secondary user
makes a transmission attempt. We can determine the actual success probability as
Pclear × Psucc.
2.6 Simulation chain
We describe the chain or path of the simulation in the simulation flowchart,
illustrated in Appendix A. In a way, the flowchart also tells on how various aspects
(e.g. environments, transmitter-receiver placements, indoor propagation model,
sensing strategies, and performance measures) come into play and interact in the
simulation sequence.
32
CHAPTER 3
SIMULATION RESULTS AND ANALYSIS
By means of simulation, we derive the following numerical results for three
different indoor environments. To allow for accurate comparisons between schemes,
we derive the results with the same random primary and secondary
transmitter/receiver locations in each simulated environment. Here we obtain each
presented results from 20,000 samples.
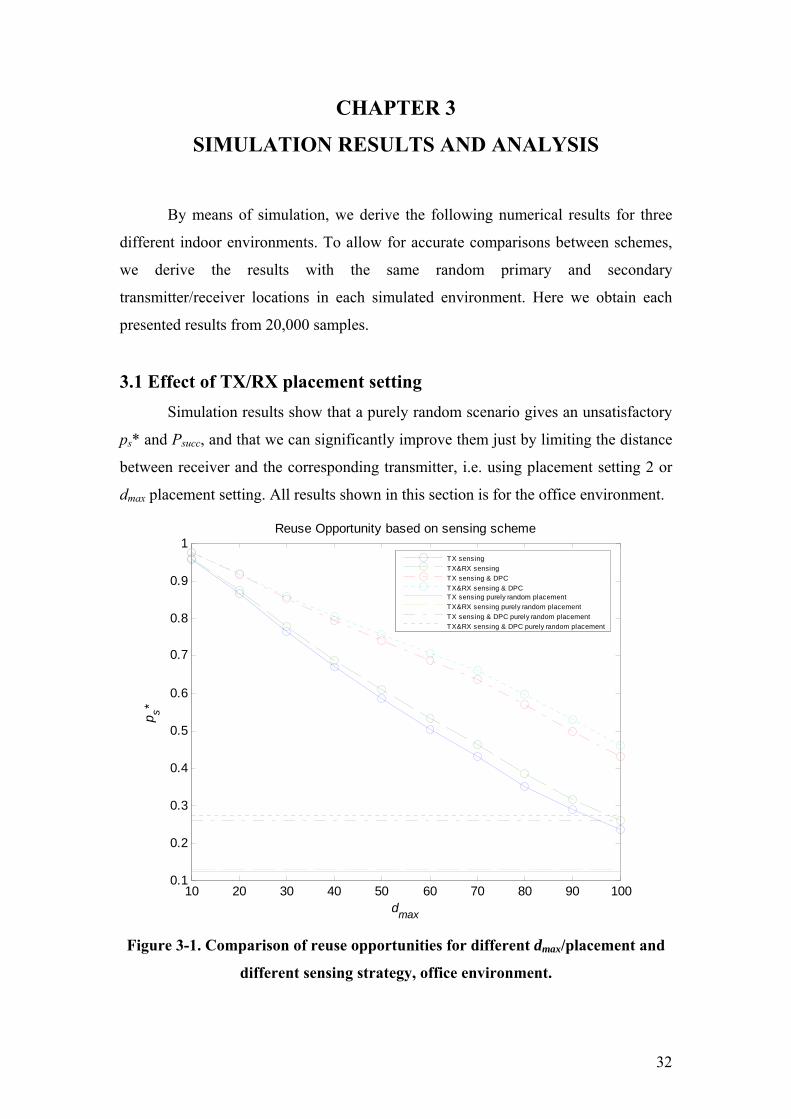
3.1 Effect of TX/RX placement setting
Simulation results show that a purely random scenario gives an unsatisfactory
ps* and Psucc, and that we can significantly improve them just by limiting the distance
between receiver and the corresponding transmitter, i.e. using placement setting 2 or
dmax placement setting. All results shown in this section is for the office environment.
10 20 30 40 50 60 70 80 90 1000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
dmax
p s*
Reuse Opportunity based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPCTX sensing purely random placementTX&RX sensing purely random placementTX sensing & DPC purely random placementTX&RX sensing & DPC purely random placement
Figure 3-1. Comparison of reuse opportunities for different dmax/placement and
different sensing strategy, office environment.
33
Figure 3-1 compares the obtained reuse opportunities for different
dmax/placement and different sensing strategy in an office environment. The lines
without marker in the lower part of the figure indicate ps* for a purely random TX/RX
placement setting when using different sensing strategy. This ps* corresponds to the
actual reuse opportunity, i.e. the probability that a randomly chosen secondary link
can coexist with the primary link in the given square environment. We observe ps* as
PMOP when Pclear approaches zero, or as Psucc when Pclear approaches one.
From the figure, we observe that both ps* become higher as dmax becomes
shorter, and they become lower as dmax becomes longer. Even when using a simple
sensing strategy, ps* can be very close to one when dmax is only 10 m. This is because
as dmax gets shorter, the receiver becomes closer to the corresponding transmitter, to
the extent that it is more likely that the location of the receiver is only in the next
room or the room after that. The proximity between a corresponding transmitter and
receiver is very close when compared to the longer distance between primary and
secondary transmitter. As such, this situation results in better interference protection
for both the primary and secondary receiver. Naturally, when a room encloses the
primary transmitter and receiver, and another room that is far away and shielded by
numerous walls between them encloses the secondary transmitter and receiver, each
receiver will have good protection from unwanted interference. We observe that ps*
goes to one regardless of the sensing strategy used when dmax goes to zero (which
means the corresponding transmitter and receiver will be located in the same room but
far separated from the other link, i.e. the other transmitter and receiver). These results
indicate that the cognitive radio system may be suitable for a short-range
communication system (e.g. between rooms in an office building).
We may conclude that ps* will greatly improve as we limit the distance of
receiver from the corresponding transmitter (dmax). As dmax goes to zero, ps* goes to
one, and the role of advance sensing strategy becomes less significant (for dmax = 10 m
ps* remains relatively unchanged regardless of the used sensing strategy). Hence, the
choice of what sensing strategy to use may depend on the minimum ps* that the
provider/regulator will pursue and/or limitation of dmax that the link provider/regulator
will impose. For example, if we want to pursue a minimum ps* of 0.5, then it is
sufficient to use TX sensing up to dmax = 60 m (alternatively, if dmax is limited to 60 m
it is sufficient to use TX sensing to obtain a minimum ps* of 0.5). If we increase dmax,
we will need to employ an advanced sensing strategy to maintain the level of ps*, e.g.
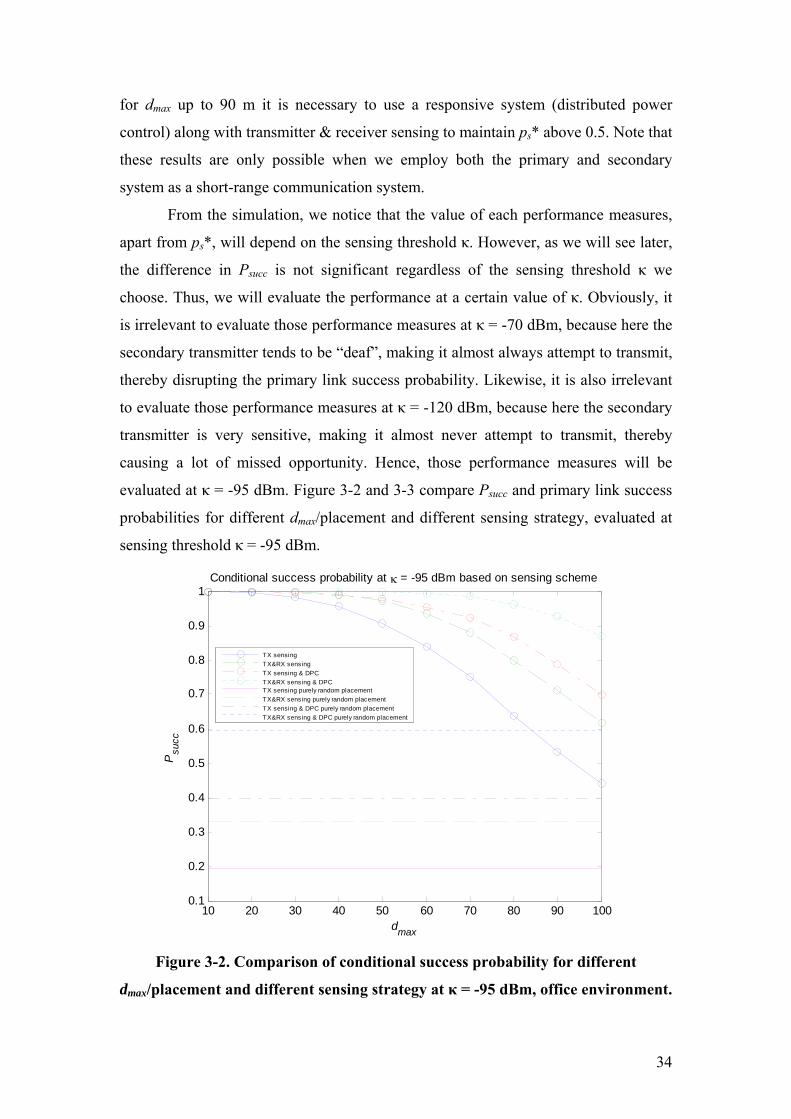
34
for dmax up to 90 m it is necessary to use a responsive system (distributed power
control) along with transmitter & receiver sensing to maintain ps* above 0.5. Note that
these results are only possible when we employ both the primary and secondary
system as a short-range communication system.
From the simulation, we notice that the value of each performance measures,
apart from ps*, will depend on the sensing threshold κ. However, as we will see later,
the difference in Psucc is not significant regardless of the sensing threshold κ we
choose. Thus, we will evaluate the performance at a certain value of κ. Obviously, it
is irrelevant to evaluate those performance measures at κ = -70 dBm, because here the
secondary transmitter tends to be “deaf”, making it almost always attempt to transmit,
thereby disrupting the primary link success probability. Likewise, it is also irrelevant
to evaluate those performance measures at κ = -120 dBm, because here the secondary
transmitter is very sensitive, making it almost never attempt to transmit, thereby
causing a lot of missed opportunity. Hence, those performance measures will be
evaluated at κ = -95 dBm. Figure 3-2 and 3-3 compare Psucc and primary link success
probabilities for different dmax/placement and different sensing strategy, evaluated at
sensing threshold κ = -95 dBm.
10 20 30 40 50 60 70 80 90 1000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
dmax
Psu
cc
Conditional success probability at κ = -95 dBm based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPCTX sensing purely random placementTX&RX sensing purely random placementTX sensing & DPC purely random placementTX&RX sensing & DPC purely random placement
Figure 3-2. Comparison of conditional success probability for different
dmax/placement and different sensing strategy at κ = -95 dBm, office environment.
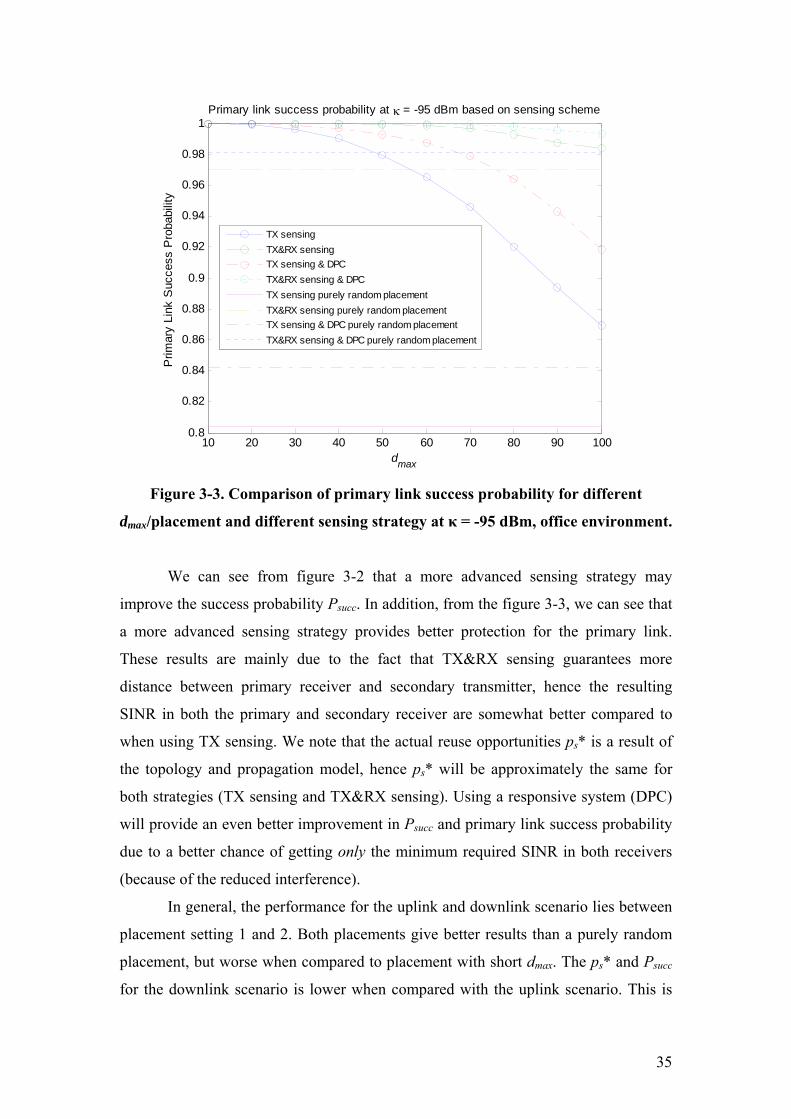
35
10 20 30 40 50 60 70 80 90 1000.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
dmax
Prim
ary
Link
Suc
cess
Pro
babi
lity
Primary link success probability at κ = -95 dBm based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPCTX sensing purely random placementTX&RX sensing purely random placementTX sensing & DPC purely random placementTX&RX sensing & DPC purely random placement
Figure 3-3. Comparison of primary link success probability for different
dmax/placement and different sensing strategy at κ = -95 dBm, office environment.
We can see from figure 3-2 that a more advanced sensing strategy may
improve the success probability Psucc. In addition, from the figure 3-3, we can see that
a more advanced sensing strategy provides better protection for the primary link.
These results are mainly due to the fact that TX&RX sensing guarantees more
distance between primary receiver and secondary transmitter, hence the resulting
SINR in both the primary and secondary receiver are somewhat better compared to
when using TX sensing. We note that the actual reuse opportunities ps* is a result of
the topology and propagation model, hence ps* will be approximately the same for
both strategies (TX sensing and TX&RX sensing). Using a responsive system (DPC)
will provide an even better improvement in Psucc and primary link success probability
due to a better chance of getting only the minimum required SINR in both receivers
(because of the reduced interference).
In general, the performance for the uplink and downlink scenario lies between
placement setting 1 and 2. Both placements give better results than a purely random
placement, but worse when compared to placement with short dmax. The ps* and Psucc
for the downlink scenario is lower when compared with the uplink scenario. This is
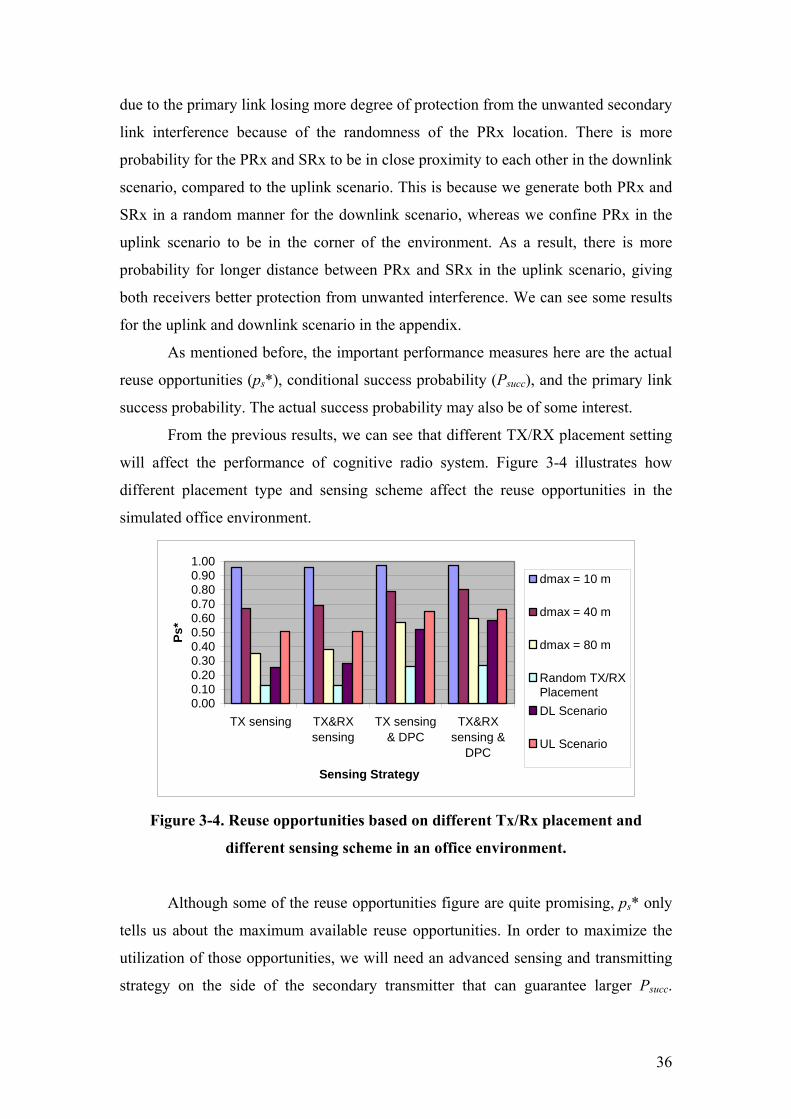
36
due to the primary link losing more degree of protection from the unwanted secondary
link interference because of the randomness of the PRx location. There is more
probability for the PRx and SRx to be in close proximity to each other in the downlink
scenario, compared to the uplink scenario. This is because we generate both PRx and
SRx in a random manner for the downlink scenario, whereas we confine PRx in the
uplink scenario to be in the corner of the environment. As a result, there is more
probability for longer distance between PRx and SRx in the uplink scenario, giving
both receivers better protection from unwanted interference. We can see some results
for the uplink and downlink scenario in the appendix.
As mentioned before, the important performance measures here are the actual
reuse opportunities (ps*), conditional success probability (Psucc), and the primary link
success probability. The actual success probability may also be of some interest.
From the previous results, we can see that different TX/RX placement setting
will affect the performance of cognitive radio system. Figure 3-4 illustrates how
different placement type and sensing scheme affect the reuse opportunities in the
simulated office environment.
0.000.100.200.300.400.500.600.700.800.901.00
TX sensing TX&RXsensing
TX sensing& DPC
TX&RXsensing &
DPC
Sensing Strategy
Ps*
dmax = 10 m
dmax = 40 m
dmax = 80 m
Random TX/RXPlacementDL Scenario
UL Scenario
Figure 3-4. Reuse opportunities based on different Tx/Rx placement and
different sensing scheme in an office environment.
Although some of the reuse opportunities figure are quite promising, ps* only
tells us about the maximum available reuse opportunities. In order to maximize the
utilization of those opportunities, we will need an advanced sensing and transmitting
strategy on the side of the secondary transmitter that can guarantee larger Psucc.
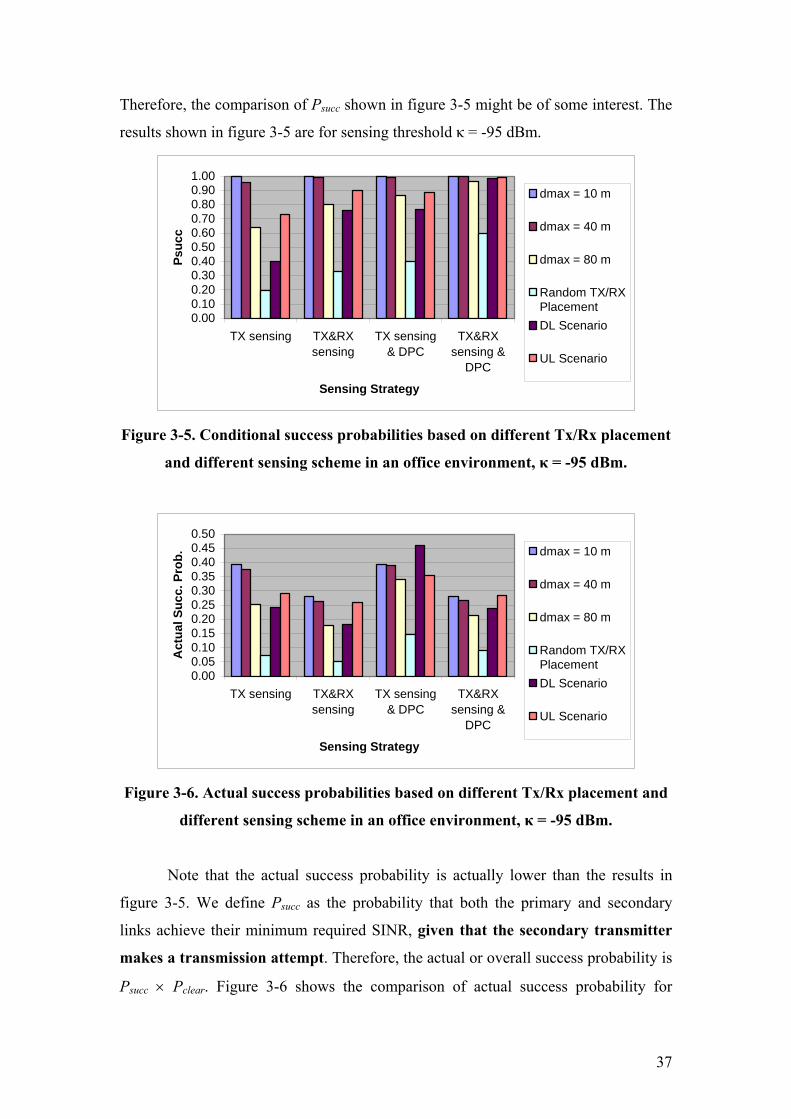
37
Therefore, the comparison of Psucc shown in figure 3-5 might be of some interest. The
results shown in figure 3-5 are for sensing threshold κ = -95 dBm.
0.000.100.200.300.400.500.600.700.800.901.00
TX sensing TX&RXsensing
TX sensing& DPC
TX&RXsensing &
DPC
Sensing Strategy
Psuc
cdmax = 10 m
dmax = 40 m
dmax = 80 m
Random TX/RXPlacementDL Scenario
UL Scenario
Figure 3-5. Conditional success probabilities based on different Tx/Rx placement
and different sensing scheme in an office environment, κ = -95 dBm.
0.000.050.100.150.200.250.300.350.400.450.50
TX sensing TX&RXsensing
TX sensing& DPC
TX&RXsensing &
DPC
Sensing Strategy
Act
ual S
ucc.
Pro
b. dmax = 10 m
dmax = 40 m
dmax = 80 m
Random TX/RXPlacementDL Scenario
UL Scenario
Figure 3-6. Actual success probabilities based on different Tx/Rx placement and
different sensing scheme in an office environment, κ = -95 dBm.
Note that the actual success probability is actually lower than the results in
figure 3-5. We define Psucc as the probability that both the primary and secondary
links achieve their minimum required SINR, given that the secondary transmitter
makes a transmission attempt. Therefore, the actual or overall success probability is
Psucc × Pclear. Figure 3-6 shows the comparison of actual success probability for
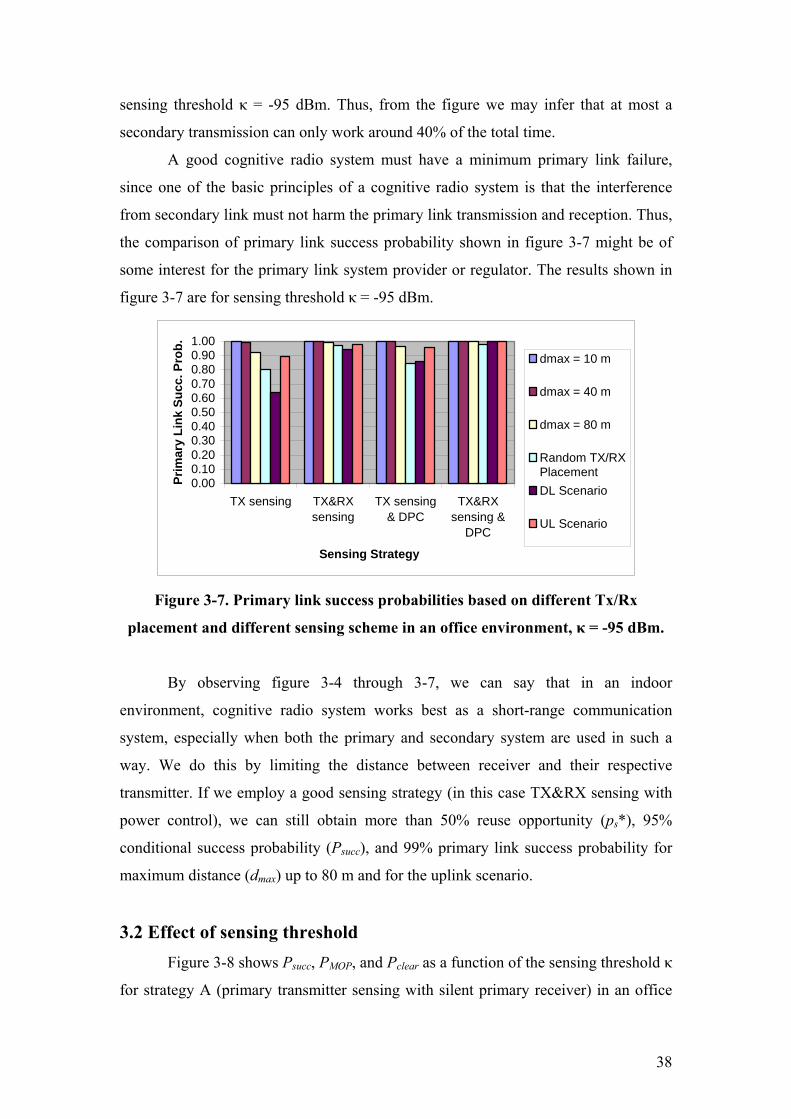
38
sensing threshold κ = -95 dBm. Thus, from the figure we may infer that at most a
secondary transmission can only work around 40% of the total time.
A good cognitive radio system must have a minimum primary link failure,
since one of the basic principles of a cognitive radio system is that the interference
from secondary link must not harm the primary link transmission and reception. Thus,
the comparison of primary link success probability shown in figure 3-7 might be of
some interest for the primary link system provider or regulator. The results shown in
figure 3-7 are for sensing threshold κ = -95 dBm.
0.000.100.200.300.400.500.600.700.800.901.00
TX sensing TX&RXsensing
TX sensing& DPC
TX&RXsensing &
DPC
Sensing Strategy
Prim
ary
Link
Suc
c. P
rob.
dmax = 10 m
dmax = 40 m
dmax = 80 m
Random TX/RXPlacementDL Scenario
UL Scenario
Figure 3-7. Primary link success probabilities based on different Tx/Rx
placement and different sensing scheme in an office environment, κ = -95 dBm.
By observing figure 3-4 through 3-7, we can say that in an indoor
environment, cognitive radio system works best as a short-range communication
system, especially when both the primary and secondary system are used in such a
way. We do this by limiting the distance between receiver and their respective
transmitter. If we employ a good sensing strategy (in this case TX&RX sensing with
power control), we can still obtain more than 50% reuse opportunity (ps*), 95%
conditional success probability (Psucc), and 99% primary link success probability for
maximum distance (dmax) up to 80 m and for the uplink scenario.
3.2 Effect of sensing threshold
Figure 3-8 shows Psucc, PMOP, and Pclear as a function of the sensing threshold κ
for strategy A (primary transmitter sensing with silent primary receiver) in an office
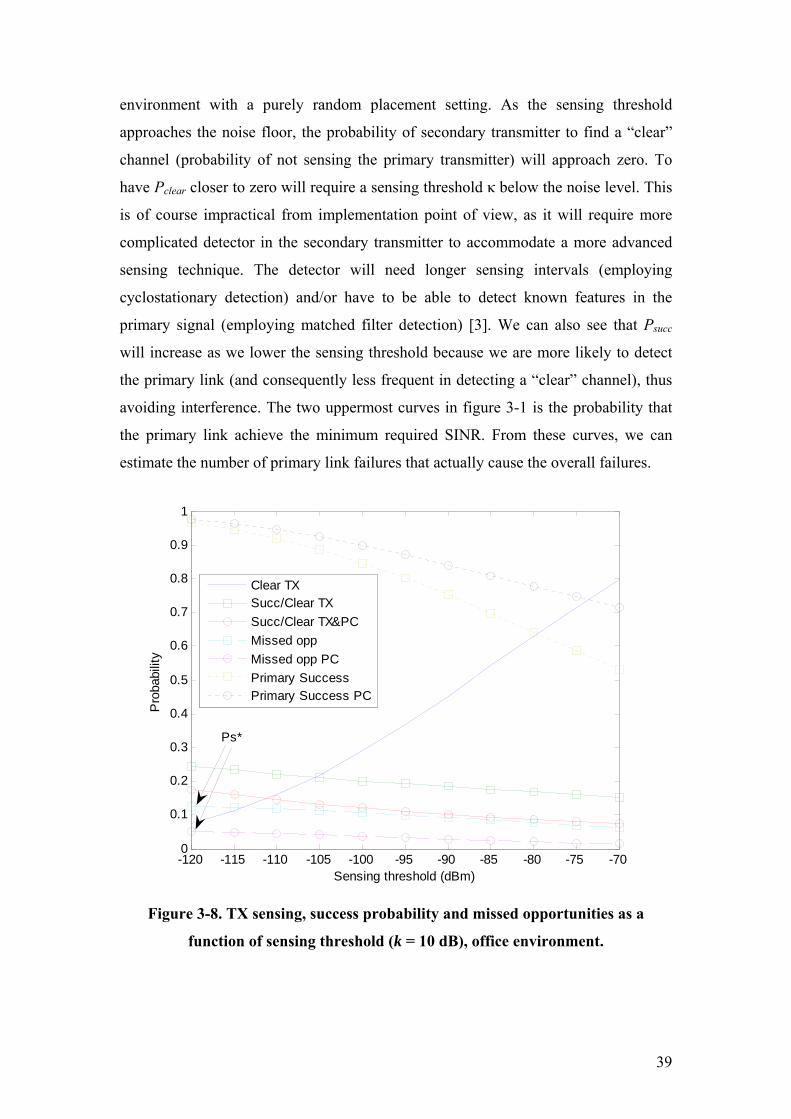
39
environment with a purely random placement setting. As the sensing threshold
approaches the noise floor, the probability of secondary transmitter to find a “clear”
channel (probability of not sensing the primary transmitter) will approach zero. To
have Pclear closer to zero will require a sensing threshold κ below the noise level. This
is of course impractical from implementation point of view, as it will require more
complicated detector in the secondary transmitter to accommodate a more advanced
sensing technique. The detector will need longer sensing intervals (employing
cyclostationary detection) and/or have to be able to detect known features in the
primary signal (employing matched filter detection) [3]. We can also see that Psucc
will increase as we lower the sensing threshold because we are more likely to detect
the primary link (and consequently less frequent in detecting a “clear” channel), thus
avoiding interference. The two uppermost curves in figure 3-1 is the probability that
the primary link achieve the minimum required SINR. From these curves, we can
estimate the number of primary link failures that actually cause the overall failures.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TXSucc/Clear TXSucc/Clear TX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Ps*
Figure 3-8. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), office environment.
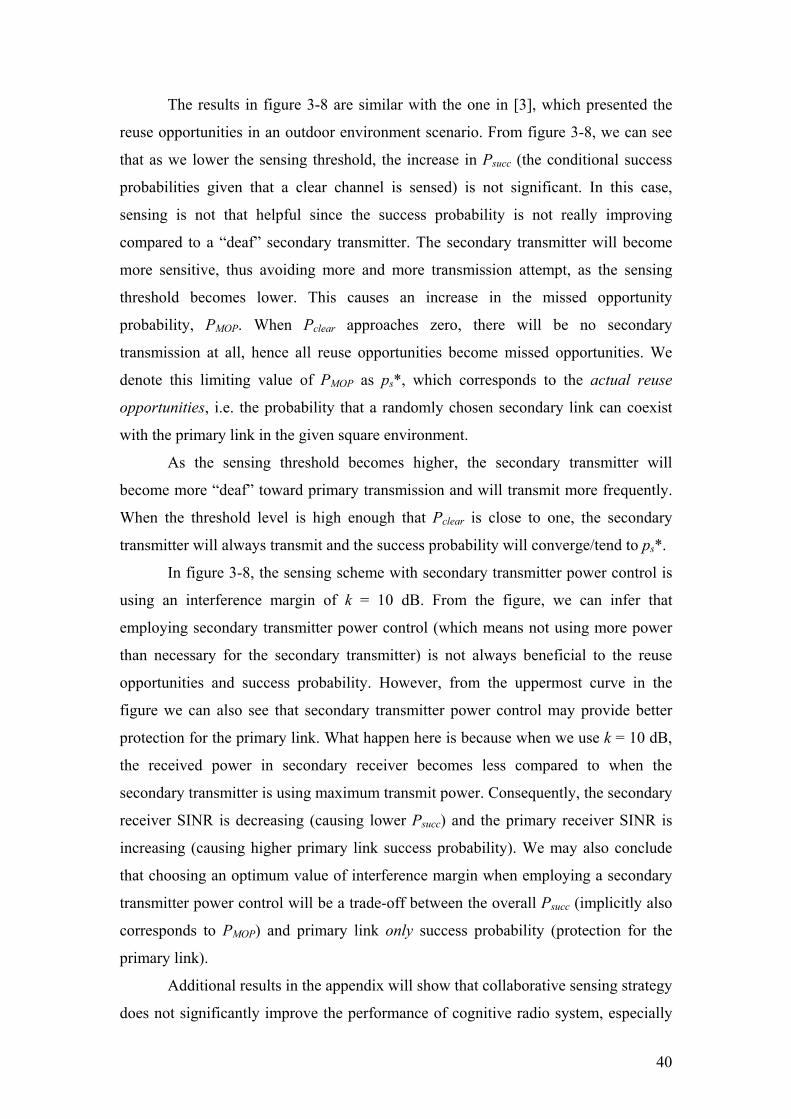
40
The results in figure 3-8 are similar with the one in [3], which presented the
reuse opportunities in an outdoor environment scenario. From figure 3-8, we can see
that as we lower the sensing threshold, the increase in Psucc (the conditional success
probabilities given that a clear channel is sensed) is not significant. In this case,
sensing is not that helpful since the success probability is not really improving
compared to a “deaf” secondary transmitter. The secondary transmitter will become
more sensitive, thus avoiding more and more transmission attempt, as the sensing
threshold becomes lower. This causes an increase in the missed opportunity
probability, PMOP. When Pclear approaches zero, there will be no secondary
transmission at all, hence all reuse opportunities become missed opportunities. We
denote this limiting value of PMOP as ps*, which corresponds to the actual reuse
opportunities, i.e. the probability that a randomly chosen secondary link can coexist
with the primary link in the given square environment.
As the sensing threshold becomes higher, the secondary transmitter will
become more “deaf” toward primary transmission and will transmit more frequently.
When the threshold level is high enough that Pclear is close to one, the secondary
transmitter will always transmit and the success probability will converge/tend to ps*.
In figure 3-8, the sensing scheme with secondary transmitter power control is
using an interference margin of k = 10 dB. From the figure, we can infer that
employing secondary transmitter power control (which means not using more power
than necessary for the secondary transmitter) is not always beneficial to the reuse
opportunities and success probability. However, from the uppermost curve in the
figure we can also see that secondary transmitter power control may provide better
protection for the primary link. What happen here is because when we use k = 10 dB,
the received power in secondary receiver becomes less compared to when the
secondary transmitter is using maximum transmit power. Consequently, the secondary
receiver SINR is decreasing (causing lower Psucc) and the primary receiver SINR is
increasing (causing higher primary link success probability). We may also conclude
that choosing an optimum value of interference margin when employing a secondary
transmitter power control will be a trade-off between the overall Psucc (implicitly also
corresponds to PMOP) and primary link only success probability (protection for the
primary link).
Additional results in the appendix will show that collaborative sensing strategy
does not significantly improve the performance of cognitive radio system, especially
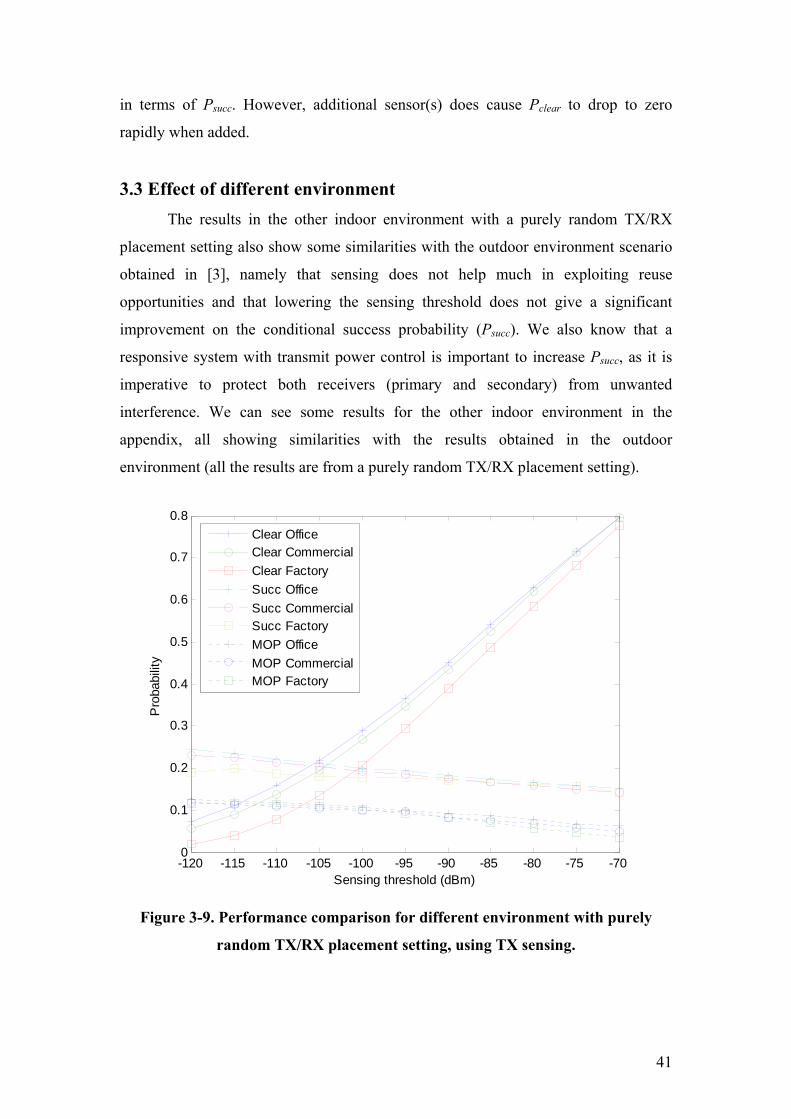
41
in terms of Psucc. However, additional sensor(s) does cause Pclear to drop to zero
rapidly when added.
3.3 Effect of different environment The results in the other indoor environment with a purely random TX/RX
placement setting also show some similarities with the outdoor environment scenario
obtained in [3], namely that sensing does not help much in exploiting reuse
opportunities and that lowering the sensing threshold does not give a significant
improvement on the conditional success probability (Psucc). We also know that a
responsive system with transmit power control is important to increase Psucc, as it is
imperative to protect both receivers (primary and secondary) from unwanted
interference. We can see some results for the other indoor environment in the
appendix, all showing similarities with the results obtained in the outdoor
environment (all the results are from a purely random TX/RX placement setting).
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Sensing threshold (dBm)
Pro
babi
lity
Clear OfficeClear CommercialClear FactorySucc OfficeSucc CommercialSucc FactoryMOP OfficeMOP CommercialMOP Factory
Figure 3-9. Performance comparison for different environment with purely
random TX/RX placement setting, using TX sensing.
42
Figure 3-9 shows how different environment affects the performance of the
cognitive radio system. Here we show Psucc, PMOP, and Pclear for strategy A (primary
transmitter sensing with silent primary receiver). From the figure, we may see that
detecting a primary transmitter signal is easier in an environment with fewer walls
(corresponding to fewer rooms), in this case the factory environment. As the number
of walls (rooms) increases, detecting a primary transmitter signal will also become
harder. In contrast, success probability (Psucc) and reuse opportunity (ps*) is better in
an environment with more walls (rooms). The numerous walls (rooms) in the office
environment provide better protection against unwanted interference compared to the
other environment with fewer walls (rooms). Consequently, they also provide more
opportunity for coexistence between links when compared to other environment with
fewer walls (rooms). As before, the increase in Psucc is not significant when we lower
the sensing threshold.
43
CHAPTER 4
CONCLUSION AND FUTURE WORK
Simulation results showed that reuse opportunities are highly dependent on
TX/RX placement. For purely random placed transmitters and receivers, the system
performance in terms of the actual reuse opportunity (ps*) and conditional success
probability (Psucc) is proven to be unsatisfactory. In an office environment with a
purely random TX/RX placement, an advanced sensing strategy can achieve a reuse
opportunity as high as 27%, which is still relatively low. These ps* and Psucc can
improve significantly as we limit the distance of receiver from the corresponding
transmitter, i.e. by limiting dmax. Here ps* goes to one as dmax goes to zero, and even a
simple sensing strategy can give good ps* and Psucc for short dmax. From simulation, in
an office environment a simple TX sensing can give a minimum ps* of 50% for dmax
up to 60 m.
Through several type of placement setting/strategy, we concur that the system
(i.e. cognitive radio in indoor environment) works best as a short-range
communication system. We can obtain maximum reuse opportunity by combination
of careful transmitter and receiver placement, advanced sensing strategy, and
responsive transmitter. In this case, we obtain the maximum reuse opportunity when
we employ both primary and secondary system as a short-range communication
system while limiting their maximum distance. Simulation results showed that in an
office environment, TX&RX sensing with responsive system (transmit power control)
can give more than 50% ps*, 95% Psucc, and 99% primary link success probability
when using -95 dBm sensing threshold for dmax up to 80 m.
One drawback of this placement setting is that employing both primary and
secondary system as a short-range communication system may be impractical in real
life. A more acceptable implementation is to utilize the secondary system as a short-
range communication system inside a planned primary system cell/area, which still
gives an acceptable performance albeit only in the uplink.
The results also showed some similarities with outdoor simulation/scenario,
namely that sensing does not help much in exploiting reuse opportunities and that
lowering the sensing threshold does not give a significant improvement on Psucc.
Naturally, employing transmit power control may improve ps* and Psucc as it can

44
protect both the primary and secondary receivers from unwanted interference. Here
we also found environment dependence on the system performance, as an
environment with more walls makes detecting primary signal more difficult, but
provides more protection for unwanted interference, improving Psucc and ps*.
In this work, we use a rather simplified indoor propagation model. Future
work may include the use of a more realistic propagation model, such as ray tracing,
which can represent better correlation property between links. Another issue is the
implementation details of the sensing strategy. Here we employ an ideal sensing
which prevents any missed detection or false alarms. Future work should incorporate
these factors to see whether there are significant changes in the overall reuse
opportunity and success probability. Future work may also investigate the reuse
opportunity in a multi-floor building (e.g. if the primary and secondary system is
located on a different floor) and the effect of using higher/lower carrier frequency
towards the reuse opportunity in an indoor environment. Results from real time
measurement can also be of some interest for future works.
45
REFERENCES
[1] National Telecommunications and Information Administration (NTIA), “FCC
Frequency Allocation Chart,” 2003. Download available at
www.ntia.doc.gov/osmhome/allochrt.pdf.
[2] J.M. Peha, “Approaches to Spectrum Sharing,” IEEE Communications
Magazine, Vol. 43, Issue 2, pp. 10-12, February 2005.
[3] J. Zander, “Can We Find (And Use) “Spectrum Holes” In Real Life? – On The
Performance of Spectrum Sensing In “Cognitive” Radio Systems,” Invited
paper, IEEE Vehicular Technology Conference (VTC) spring 2009,
Barcelona, March 2009.
[4] S. Srinivasa, S. A. Jafar, “The Throughput Potential of Cognitive Radio: A
Theoretical Perspective,” Invited Paper, Fortieth Asilomar Conference on
Signals, Systems and Computers, 2006. pp. 221-225, 29 October – 1
November 2006.
[5] S. Srinivasa, S. A. Jafar, “The Throughput Potential of Cognitive Radio: A
Theoretical Perspective,” IEEE Communications Magazine, pp. 73-79, May
2007.
[6] S. A. Jafar, S. Srinivasa, “Capacity Limits of Cognitive Radio with Distributed
and Dynamic Spectral Activity,” IEEE Journal on Selected Areas in
Communications, vol. 25, pp. 529–537, April 2007.
[7] D. Cabric, S. M. Mishra, R. W. Brodersen, “Implementation Issues in
Spectrum Sensing for Cognitive Radios,” Thirty-Eighth Asilomar Conference
on Signals, Systems and Computers, 2004. Volume 1, pp. 772-776, 7-10
November 2004.
[8] S. Srinivasa, S. A. Jafar, “Soft Sensing and Optimal Power Control for
Cognitive Radio,” Proc. IEEE Globecom 2007.
[9] K. Hamdi, W. Zhang, K. Ben Letaief, “Power Control in Cognitive Radio
Systems Based on Spectrum Sensing Side Information,” IEEE International
Conference on Communications, June 2007.
[10] J. Unnikrishnan, V. V. Veeravalli, “Cooperative Sensing for Primary
Detection in Cognitive Radio,” IEEE Journal of Selected Topics in Signal
Processing, vol. 2, No. 1, pp. 18-27, February 2008.
46
[11] G. Ganesan, Y. Li, “Cooperative Spectrum Sensing in Cognitive Radio, Part I:
Two User Networks,” IEEE Transactions on Wireless Communications, vol.
6, No. 6, pp. 2204-2213, June 2007.
[12] H. Choi, K. Jang, Y. Cheong, “Adaptive Sensing Threshold Control Based on
Transmission Power in Cognitive Radio Systems,” Invited Paper, 3rd
International Conference on Cognitive Radio Oriented Wireless Networks and
Communications, 2008. CrownCom 2008. pp. 1-6, 15-17 May 2008.
[13] J. Zhu, Z. Xu, F. Wang, B. Huang, B. Zhang, “Double Threshold Energy
Detection of Cooperative Spectrum Sensing in Cognitive Radio,” 3rd
International Conference on Cognitive Radio Oriented Wireless Networks and
Communications, 2008. CrownCom 2008. pp. 1-5, 15-17 May 2008.
[14] M. Nekovee, “Impact of Cognitive Radio on Future Management of
Spectrum,” Invited Paper, 3rd International Conference on Cognitive Radio
Oriented Wireless Networks and Communications, 2008. CrownCom 2008.
pp. 1-6, 15-17 May 2008.
[15] M. Sherman, A. N. Mody, R. Martinez, C. Rodriguez, “IEEE Standards
Supporting Cognitive Radio and Networks, Dynamic Spectrum Access, and
Coexistence,” IEEE Communications Magazine, pp. 72-79, July 2008.
[16] J. Mitola, G. Q. Maguire, “Cognitive Radio: Making Software Radios More
Personal,” IEEE Personal Communications, vol. 6, no. 4, pp. 13-18, August
1999.
[17] I. F. Akyildiz, W. Lee, M. C. Vuran, S. Mohanty, “A Survey on Spectrum
Management in Cognitive Radio Networks,” IEEE Communications
Magazine, pp. 40-48, April 2008.
[18] C. Guo, T. Zhang, Z. Zeng, C. Feng, “Investigation on Spectrum Sharing
Technology Based on Cognitive Radio,” First International Conference on
Communications and Networking in China, 2006. ChinaCom '06. pp. 1-5, 25-
27 October 2006.
[19] 3rd Generation Partnership Project (3GPP); Technical Specification Group
Radio Access Network; FDD Base Station Classification (Release 2000). 3G
TR 25.951 V0.0.1 (2000-09); Technical Report.
[20] S. Pettersson, “Radio Resource Management for Wireless Indoor
Communication Systems: Performance and Implementation Aspects,” PhD
Dissertation, Radio Communication Systems Laboratory, Royal Institute of
47
Technology, 2004.
[21] C. Törnevik, J. Berg, F. Lotse, M. Madfors, “Propagation Models, Cell
Planning and Channel Allocation for Indoor Applications of Cellular
Systems,” IEEE 43rd Vehicular Technology Conference, 1993, pp. 867-870,
18-20 May 1993.
[22] M. Lott, I. Forkel, “A Multi-Wall-and-Floor Model for Indoor Radio
Propagation,” IEEE VTS 53rd Vehicular Technology Conference, 2001. VTC
2001 Spring. Volume 1, pp. 464-468, 6-9 May 2001.
[23] K. W. Cheung, J. H. Sau, M. S. Fong, R. D. Murch, “Indoor Propagation
Prediction Utilizing a New Empirical Model,” Singapore ICCS '94.
Conference Proceedings. Volume 1, pp. 15-19, 14-18 November 1994.
[24] S. Y. Seidel, T. S. Rappaport, ”900 MHz Path Loss Measurements and
Prediction Techniques for In-Building Communication System Design,” Proc.
41st IEEE Vehicular Technology Conf., pp. 613-618, May 1991.
[25] S. Y. Seidel, T. S. Rappaport, “914 MHz Path Loss Prediction Models for
Indoor Wireless Communications in Multifloored Buildings,” IEEE
Transactions on Antennas and Propagation, vol. 40, No. 2, pp. 207-217,
February 1992.
[26] S. Y. Seidel, T. S. Rappaport, M. J. Feuerstein, K. L. Blackard, “The impact of
surrounding buildings on propagation for wireless in-building personal
communications system design,” Proc. 42nd IEEE Vehicular Technology
Conference, pp. 814-818, May 1992.
[27] J. F. Lafortune, M. Lecours, “Measurement and Modeling of Propagation
Losses in a Building at 900 MHz,” IEEE Transactions on Vehicular
Technology, pp. 101-108, May 1990.
[28] J. Kivinen, X. Zhao, P. Vainikainen, “Wideband Indoor Radio Channel
Measurements With Direction of Arrival Estimations in the 5 GHz Band,”
IEEE VTS 50th Vehicular Technology Conference, 1999. VTC 1999 - Fall.
vol. 4, pp. 2308-2312, 19-22 September 1999.
[29] S. Zvhovec, M. Valek, P. Pechac, “Results of Indoor Propagation
Measurement Campaign For WLAN Systems Operating in 2.4 GHz ISM
Band,” Twelfth International Conference on Antennas and Propagation, 2003.
(ICAP 2003). vol. 1, pp. 63-66, 31 March-3 April 2003.
[30] IEEE C802.16m-07/060; F. I-Kang, L. Chi-Fang, S. Ting-Chen, S. Wern-Hoo,

48
“Correlation Models for Shadow Fading Simulation,” submitted on 5 March
2007 as part of IEEE 802.16 Broadband Wireless Access Working Group
Project, http://ieee802.org/16.
[31] Lecture Notes IK2502: Project Course in Wireless Networks, Year 2008.
[32] J. Zander, S. L. Kim, “Radio Resource Management in Wireless Networks,”
Artech House, 2001.
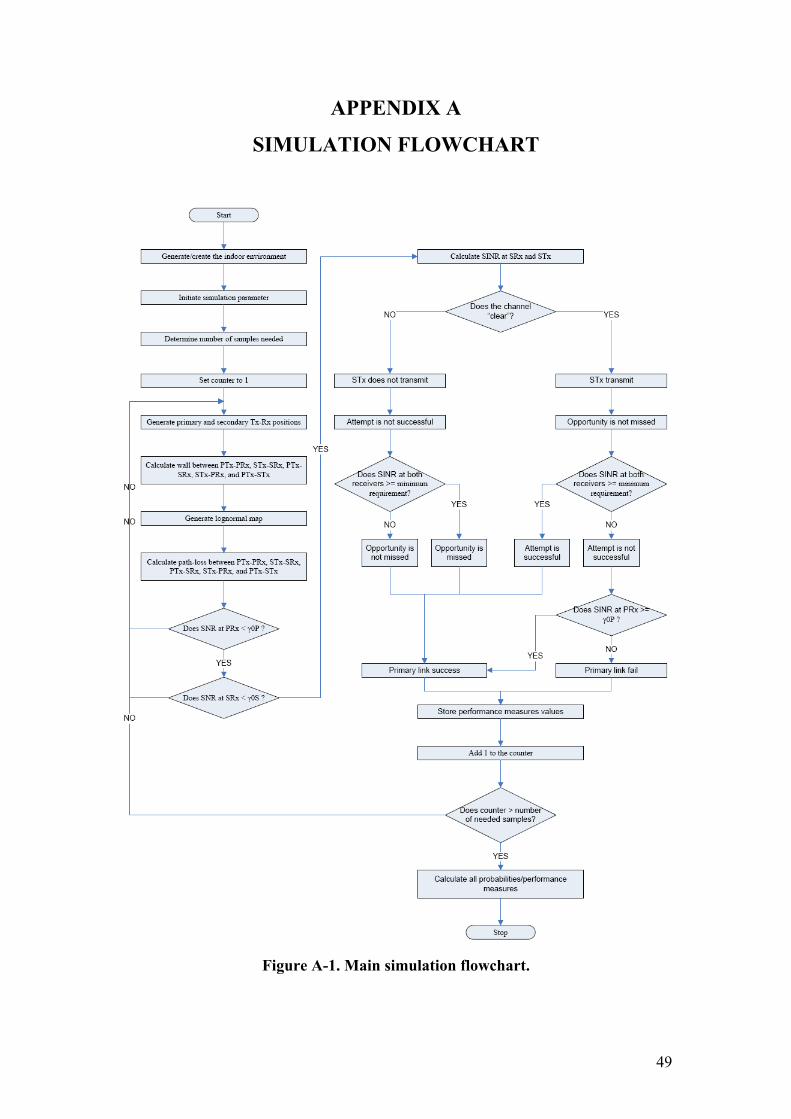
49
APPENDIX A
SIMULATION FLOWCHART
Figure A-1. Main simulation flowchart.
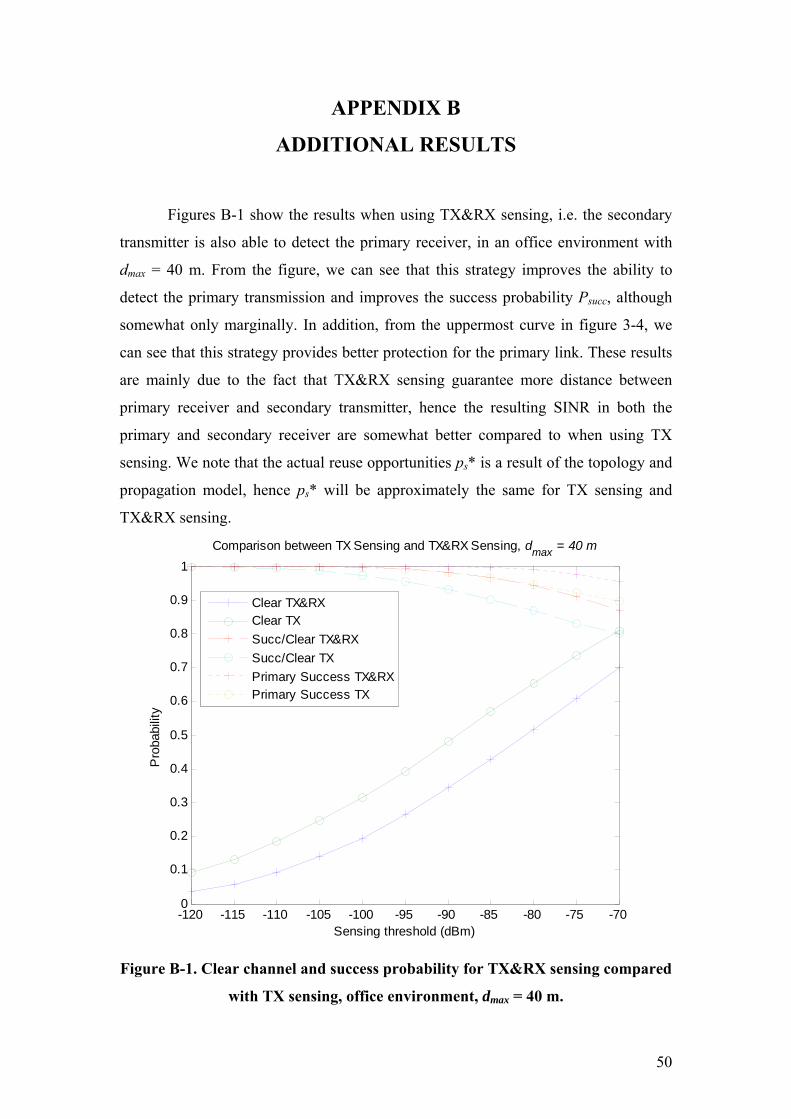
50
APPENDIX B
ADDITIONAL RESULTS
Figures B-1 show the results when using TX&RX sensing, i.e. the secondary
transmitter is also able to detect the primary receiver, in an office environment with
dmax = 40 m. From the figure, we can see that this strategy improves the ability to
detect the primary transmission and improves the success probability Psucc, although
somewhat only marginally. In addition, from the uppermost curve in figure 3-4, we
can see that this strategy provides better protection for the primary link. These results
are mainly due to the fact that TX&RX sensing guarantee more distance between
primary receiver and secondary transmitter, hence the resulting SINR in both the
primary and secondary receiver are somewhat better compared to when using TX
sensing. We note that the actual reuse opportunities ps* is a result of the topology and
propagation model, hence ps* will be approximately the same for TX sensing and
TX&RX sensing.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Comparison between TX Sensing and TX&RX Sensing, dmax = 40 m
Clear TX&RXClear TXSucc/Clear TX&RXSucc/Clear TXPrimary Success TX&RXPrimary Success TX
Figure B-1. Clear channel and success probability for TX&RX sensing compared
with TX sensing, office environment, dmax = 40 m.
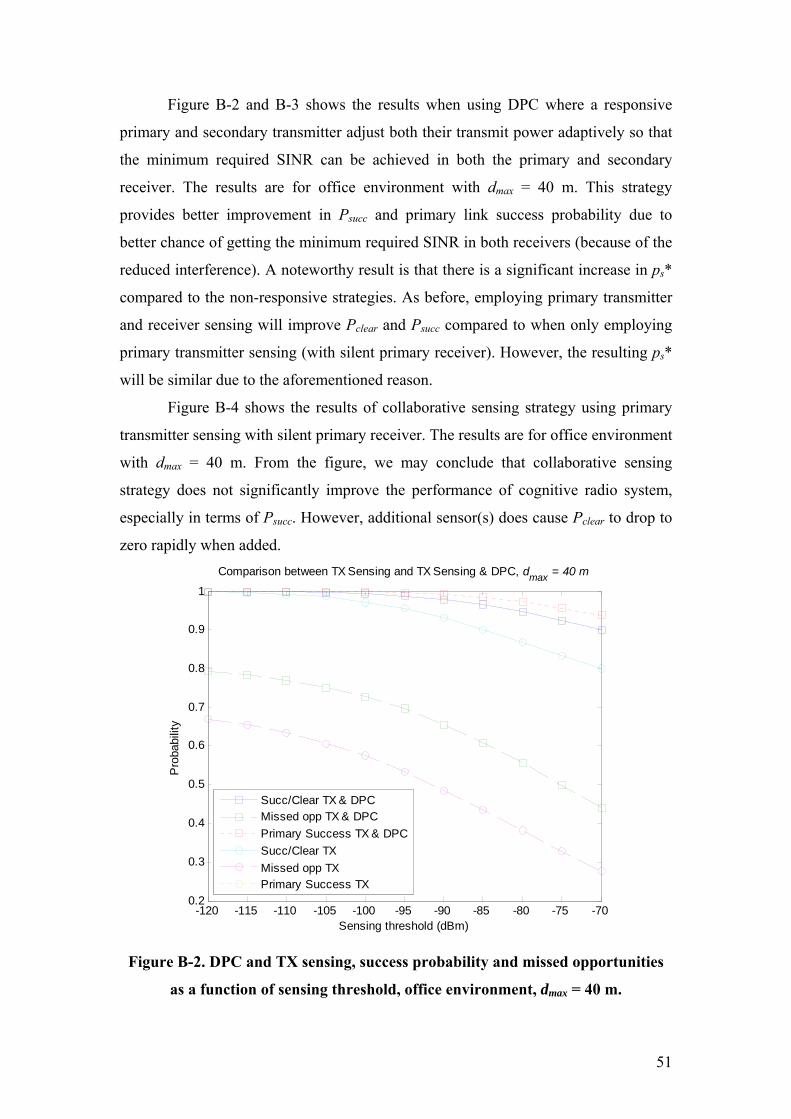
51
Figure B-2 and B-3 shows the results when using DPC where a responsive
primary and secondary transmitter adjust both their transmit power adaptively so that
the minimum required SINR can be achieved in both the primary and secondary
receiver. The results are for office environment with dmax = 40 m. This strategy
provides better improvement in Psucc and primary link success probability due to
better chance of getting the minimum required SINR in both receivers (because of the
reduced interference). A noteworthy result is that there is a significant increase in ps*
compared to the non-responsive strategies. As before, employing primary transmitter
and receiver sensing will improve Pclear and Psucc compared to when only employing
primary transmitter sensing (with silent primary receiver). However, the resulting ps*
will be similar due to the aforementioned reason.
Figure B-4 shows the results of collaborative sensing strategy using primary
transmitter sensing with silent primary receiver. The results are for office environment
with dmax = 40 m. From the figure, we may conclude that collaborative sensing
strategy does not significantly improve the performance of cognitive radio system,
especially in terms of Psucc. However, additional sensor(s) does cause Pclear to drop to
zero rapidly when added.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Comparison between TX Sensing and TX Sensing & DPC, dmax = 40 m
Succ/Clear TX & DPCMissed opp TX & DPCPrimary Success TX & DPCSucc/Clear TXMissed opp TXPrimary Success TX
Figure B-2. DPC and TX sensing, success probability and missed opportunities
as a function of sensing threshold, office environment, dmax = 40 m.
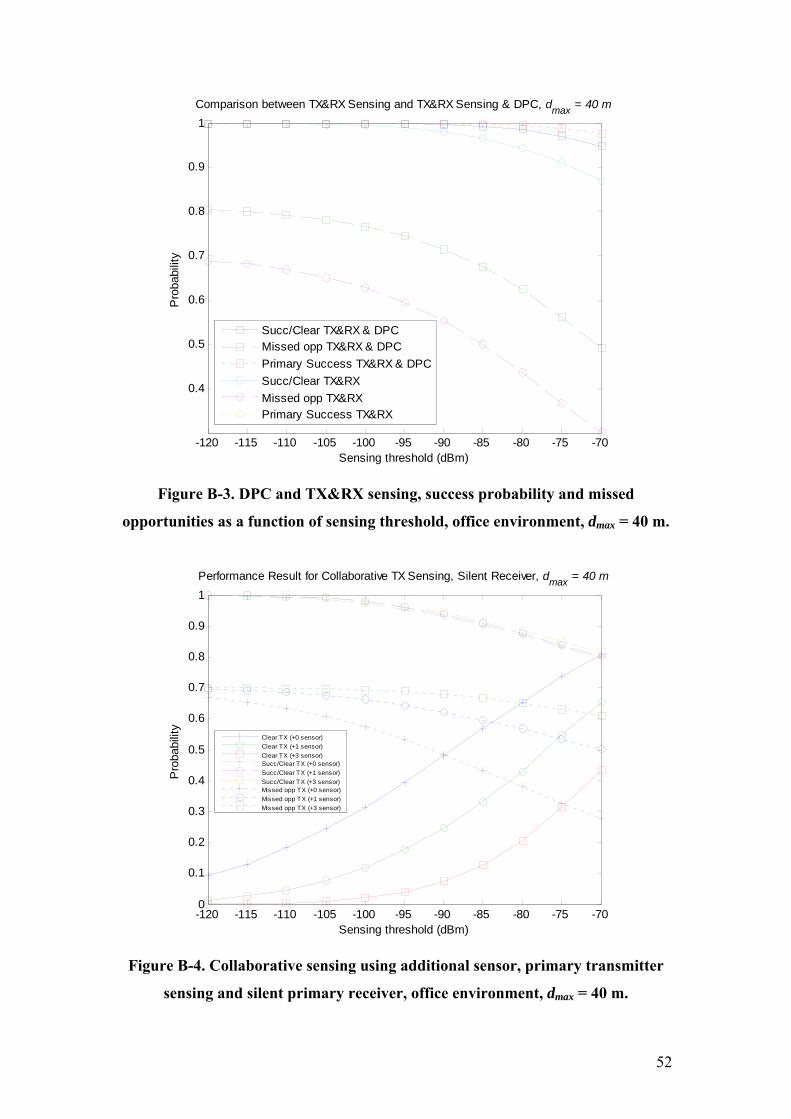
52
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -70
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Comparison between TX&RX Sensing and TX&RX Sensing & DPC, dmax = 40 m
Succ/Clear TX&RX & DPCMissed opp TX&RX & DPCPrimary Success TX&RX & DPCSucc/Clear TX&RXMissed opp TX&RXPrimary Success TX&RX
Figure B-3. DPC and TX&RX sensing, success probability and missed
opportunities as a function of sensing threshold, office environment, dmax = 40 m.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Collaborative TX Sensing, Silent Receiver, dmax = 40 m
Clear TX (+0 sensor)Clear TX (+1 sensor)Clear TX (+3 sensor)Succ/Clear TX (+0 sensor)Succ/Clear TX (+1 sensor)Succ/Clear TX (+3 sensor)Missed opp TX (+0 sensor)Missed opp TX (+1 sensor)Missed opp TX (+3 sensor)
Figure B-4. Collaborative sensing using additional sensor, primary transmitter
sensing and silent primary receiver, office environment, dmax = 40 m.
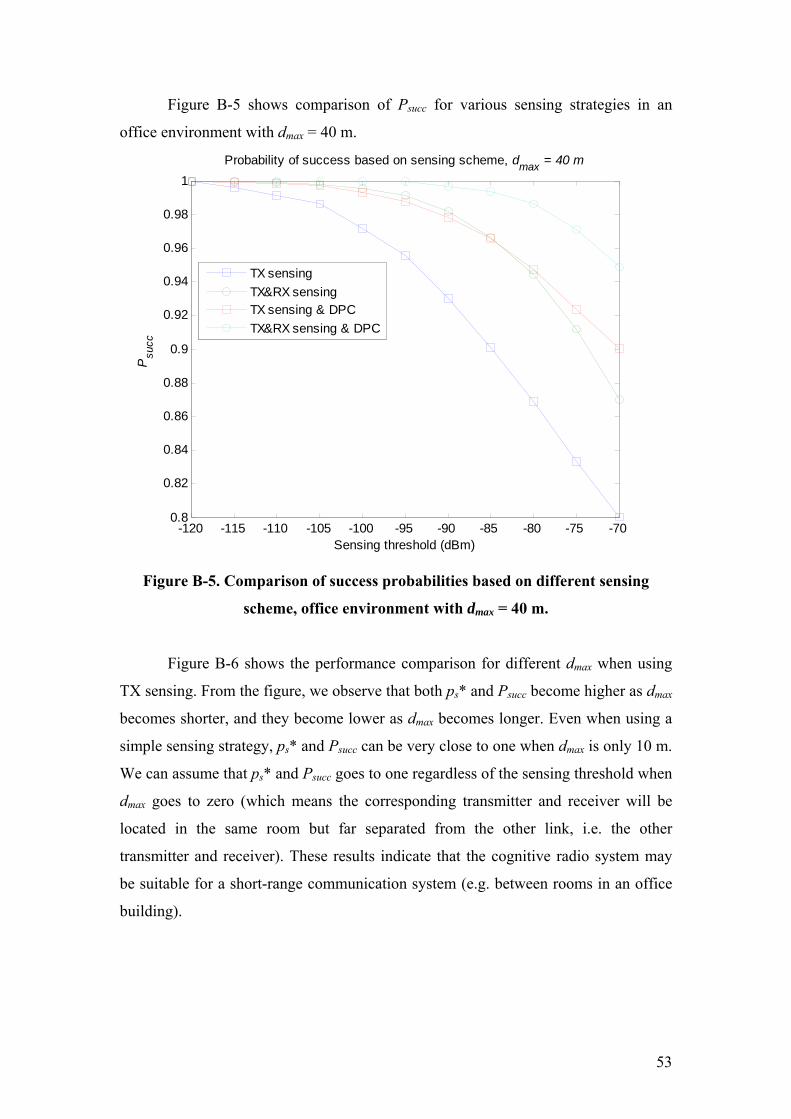
53
Figure B-5 shows comparison of Psucc for various sensing strategies in an
office environment with dmax = 40 m.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.8
0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
Sensing threshold (dBm)
Psu
ccProbability of success based on sensing scheme, dmax = 40 m
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-5. Comparison of success probabilities based on different sensing
scheme, office environment with dmax = 40 m.
Figure B-6 shows the performance comparison for different dmax when using
TX sensing. From the figure, we observe that both ps* and Psucc become higher as dmax
becomes shorter, and they become lower as dmax becomes longer. Even when using a
simple sensing strategy, ps* and Psucc can be very close to one when dmax is only 10 m.
We can assume that ps* and Psucc goes to one regardless of the sensing threshold when
dmax goes to zero (which means the corresponding transmitter and receiver will be
located in the same room but far separated from the other link, i.e. the other
transmitter and receiver). These results indicate that the cognitive radio system may
be suitable for a short-range communication system (e.g. between rooms in an office
building).
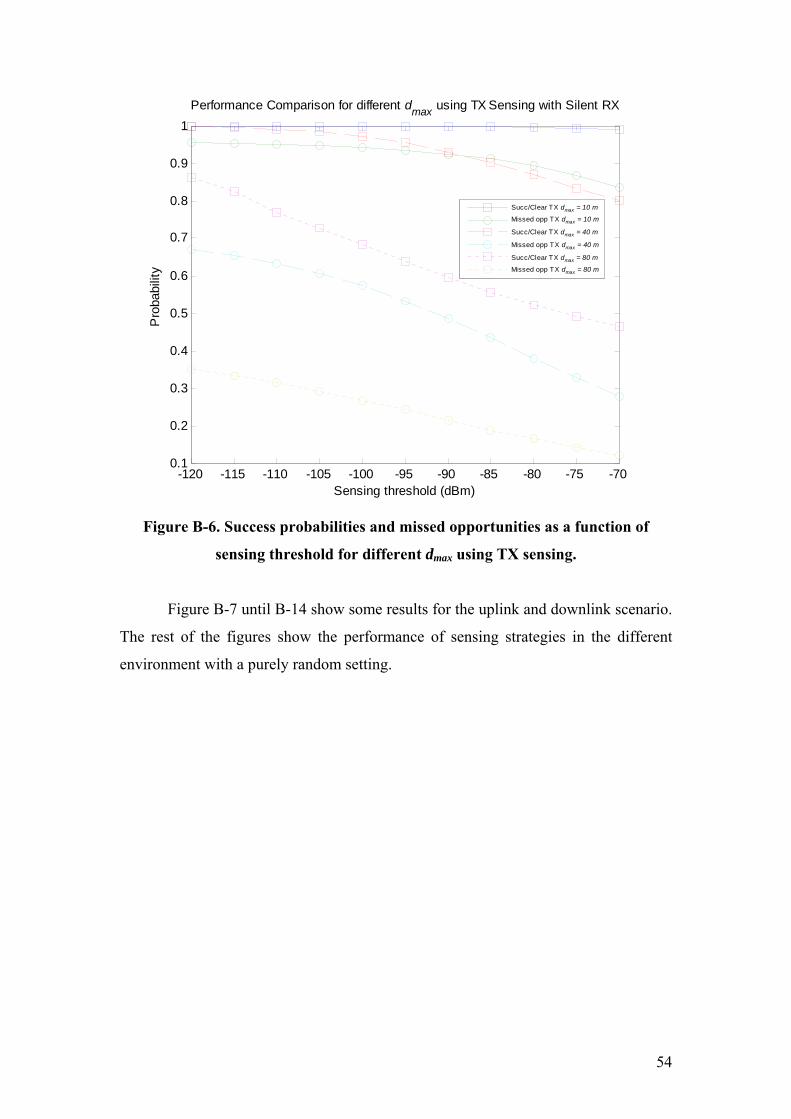
54
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Comparison for different dmax using TX Sensing with Silent RX
Succ/Clear TX dmax = 10 m
Missed opp TX dmax = 10 m
Succ/Clear TX dmax = 40 m
Missed opp TX dmax = 40 m
Succ/Clear TX dmax = 80 m
Missed opp TX dmax = 80 m
Figure B-6. Success probabilities and missed opportunities as a function of
sensing threshold for different dmax using TX sensing.
Figure B-7 until B-14 show some results for the uplink and downlink scenario.
The rest of the figures show the performance of sensing strategies in the different
environment with a purely random setting.
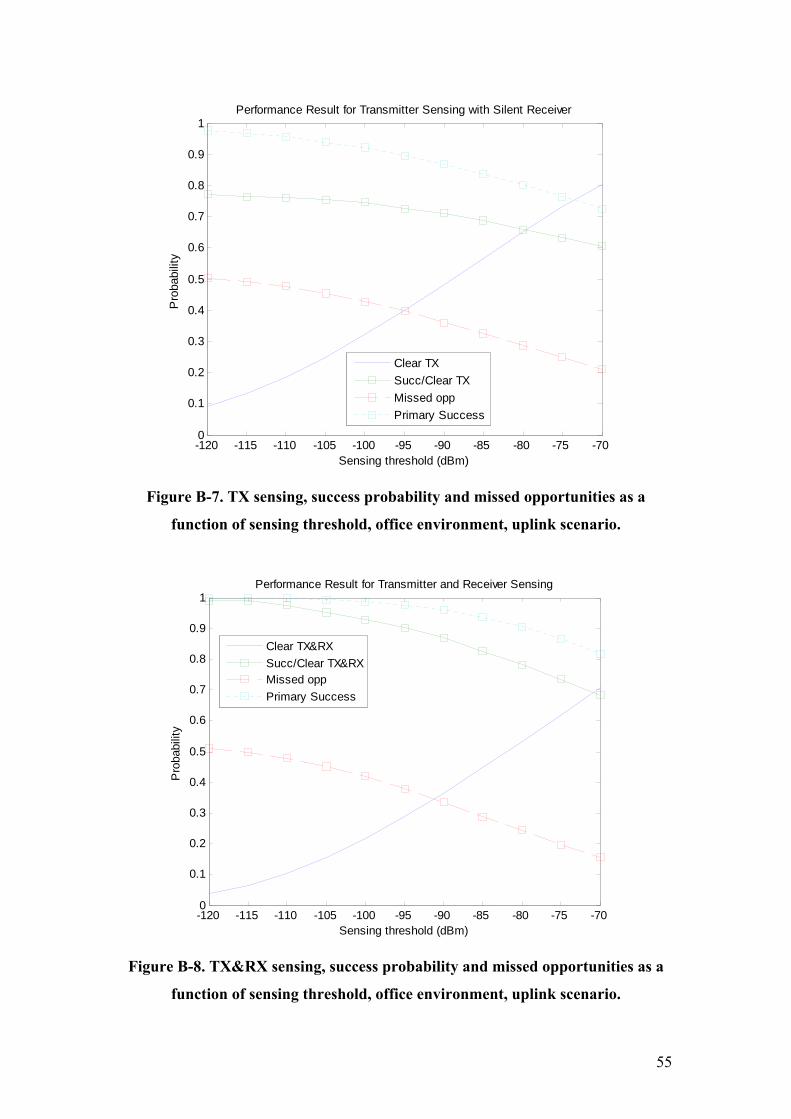
55
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Transmitter Sensing with Silent Receiver
Clear TXSucc/Clear TXMissed oppPrimary Success
Figure B-7. TX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, uplink scenario.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Transmitter and Receiver Sensing
Clear TX&RXSucc/Clear TX&RXMissed oppPrimary Success
Figure B-8. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, uplink scenario.
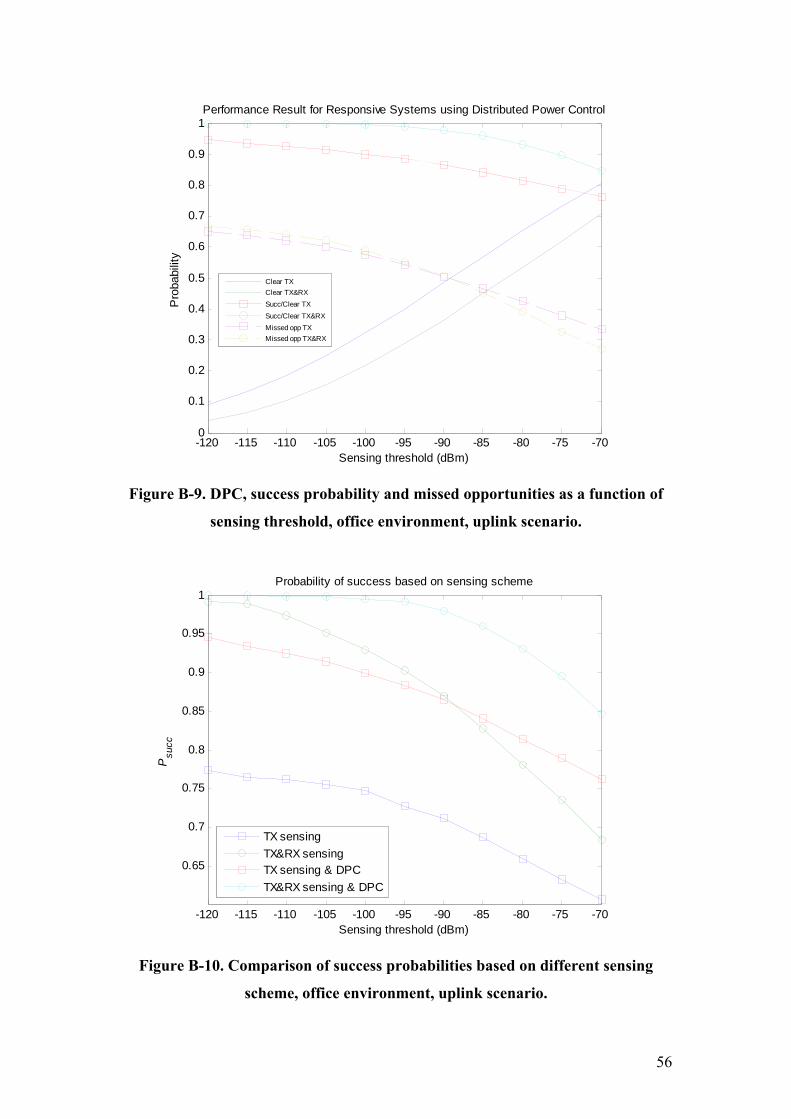
56
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Responsive Systems using Distributed Power Control
Clear TXClear TX&RXSucc/Clear TXSucc/Clear TX&RXMissed opp TXMissed opp TX&RX
Figure B-9. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment, uplink scenario.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -70
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Sensing threshold (dBm)
Psu
cc
Probability of success based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-10. Comparison of success probabilities based on different sensing
scheme, office environment, uplink scenario.
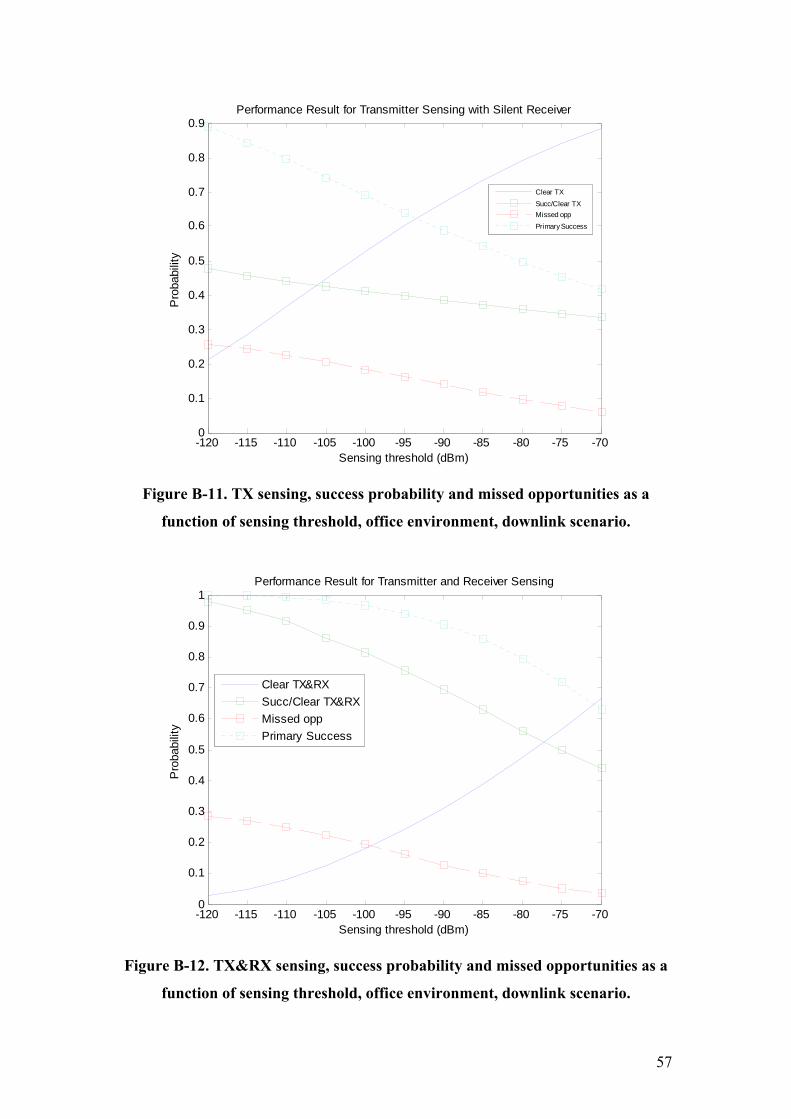
57
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Transmitter Sensing with Silent Receiver
Clear TXSucc/Clear TXMissed oppPrimary Success
Figure B-11. TX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, downlink scenario.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Transmitter and Receiver Sensing
Clear TX&RXSucc/Clear TX&RXMissed oppPrimary Success
Figure B-12. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold, office environment, downlink scenario.
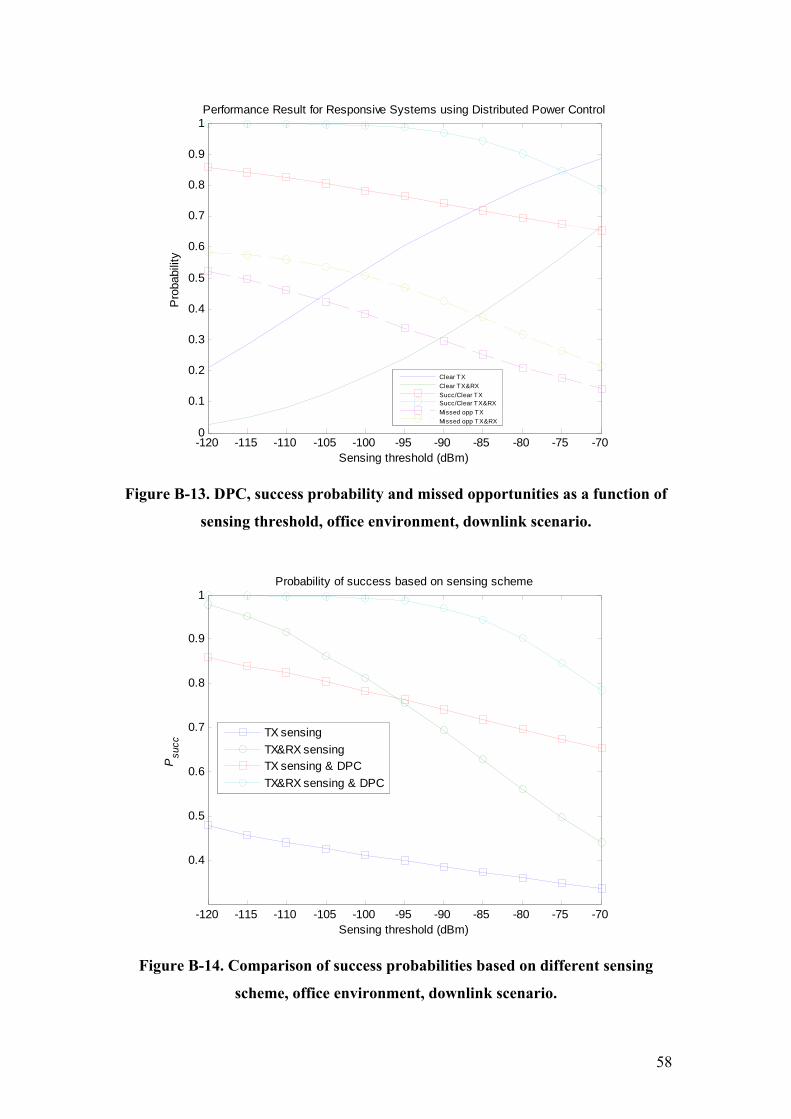
58
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Performance Result for Responsive Systems using Distributed Power Control
Clear TXClear TX&RXSucc/Clear TXSucc/Clear TX&RXMissed opp TXMissed opp TX&RX
Figure B-13. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment, downlink scenario.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -70
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Psu
cc
Probability of success based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-14. Comparison of success probabilities based on different sensing
scheme, office environment, downlink scenario.
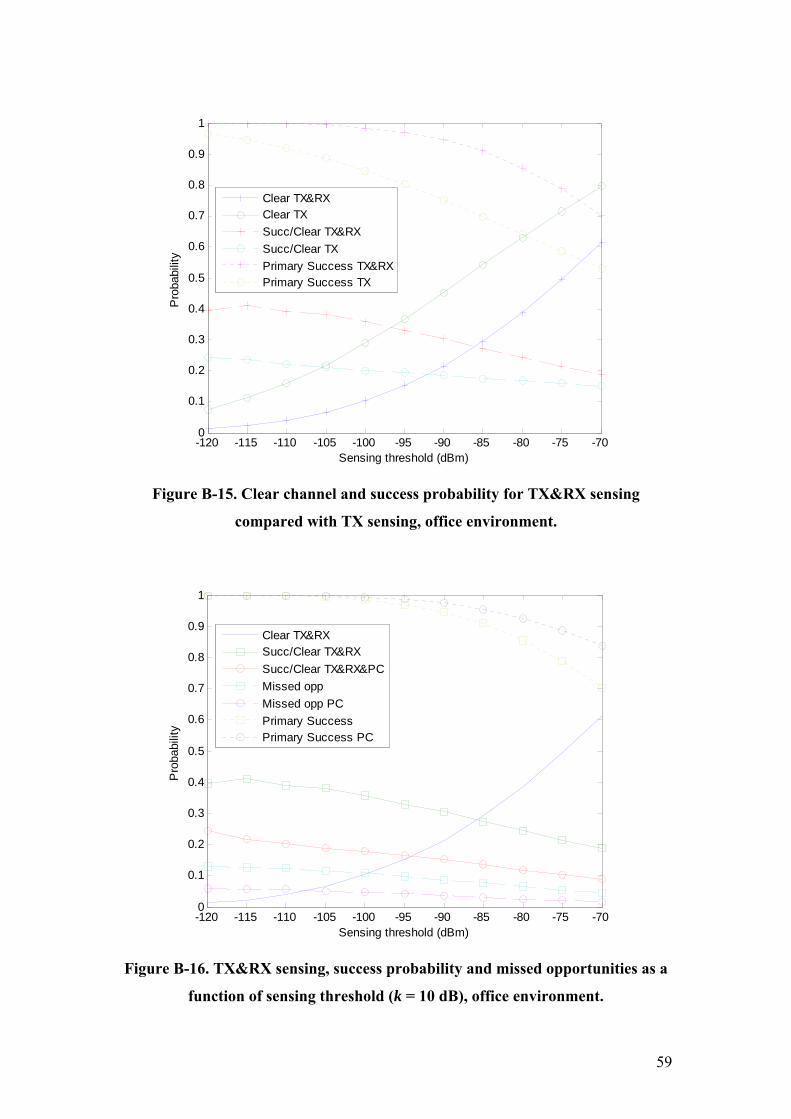
59
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TX&RXClear TXSucc/Clear TX&RXSucc/Clear TXPrimary Success TX&RXPrimary Success TX
Figure B-15. Clear channel and success probability for TX&RX sensing
compared with TX sensing, office environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TX&RXSucc/Clear TX&RXSucc/Clear TX&RX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Figure B-16. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), office environment.
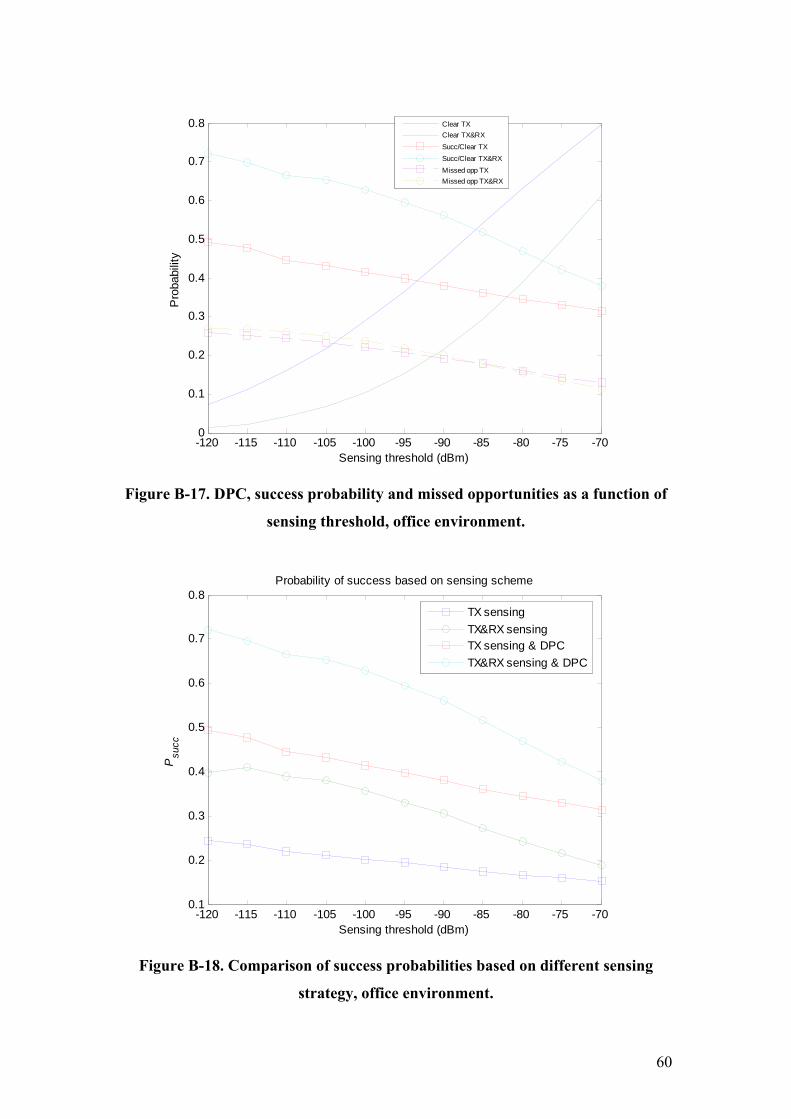
60
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Sensing threshold (dBm)
Pro
babi
lity
Clear TXClear TX&RXSucc/Clear TXSucc/Clear TX&RXMissed opp TXMissed opp TX&RX
Figure B-17. DPC, success probability and missed opportunities as a function of
sensing threshold, office environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Sensing threshold (dBm)
Psu
cc
Probability of success based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-18. Comparison of success probabilities based on different sensing
strategy, office environment.
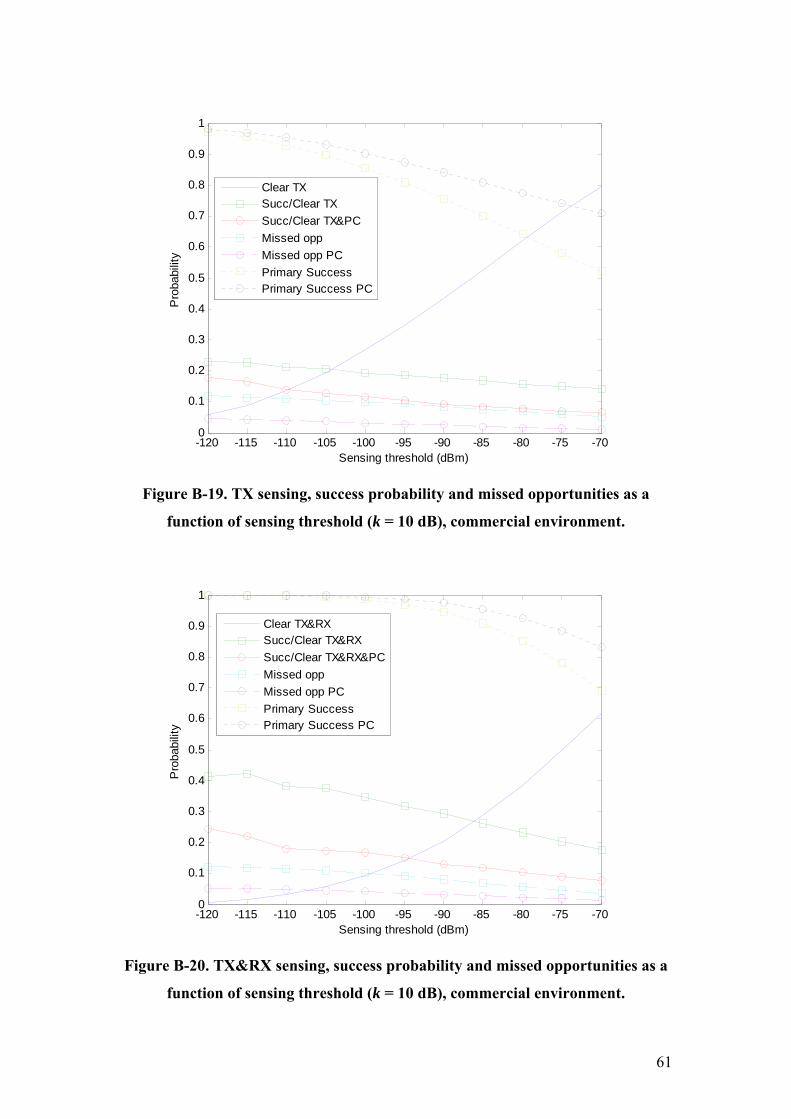
61
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TXSucc/Clear TXSucc/Clear TX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Figure B-19. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), commercial environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TX&RXSucc/Clear TX&RXSucc/Clear TX&RX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Figure B-20. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), commercial environment.
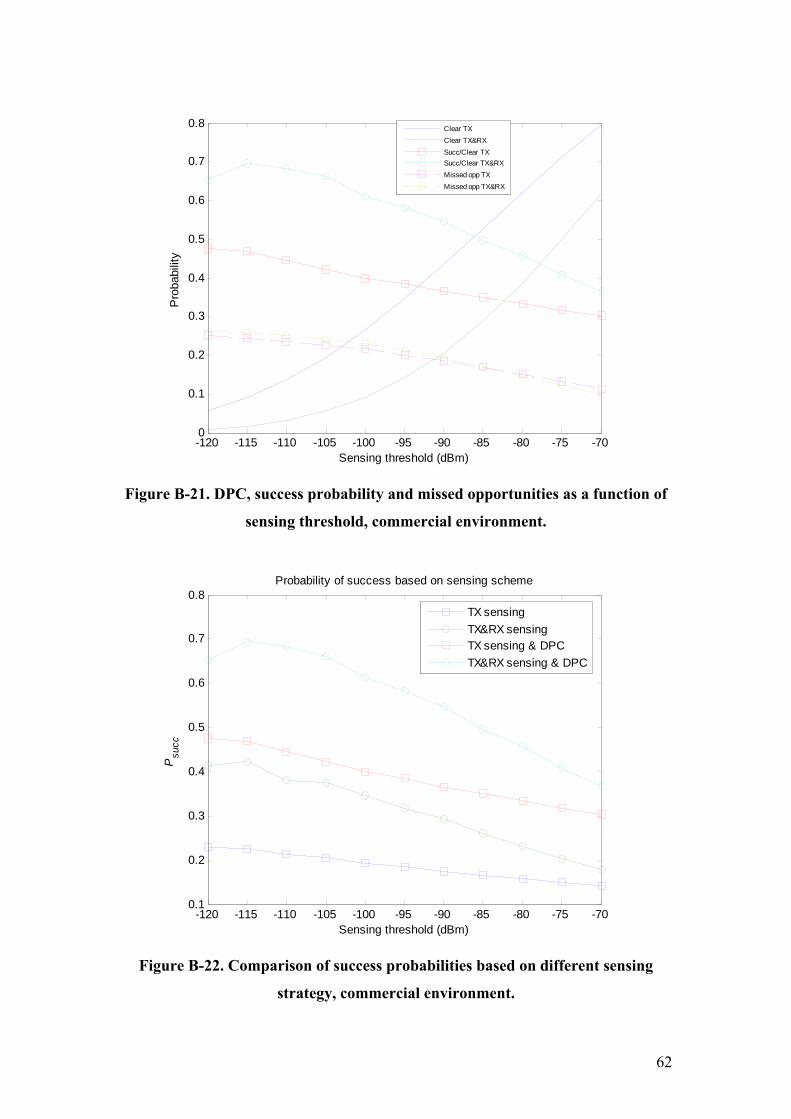
62
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Sensing threshold (dBm)
Pro
babi
lity
Clear TXClear TX&RXSucc/Clear TXSucc/Clear TX&RXMissed opp TXMissed opp TX&RX
Figure B-21. DPC, success probability and missed opportunities as a function of
sensing threshold, commercial environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Sensing threshold (dBm)
Psu
cc
Probability of success based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-22. Comparison of success probabilities based on different sensing
strategy, commercial environment.
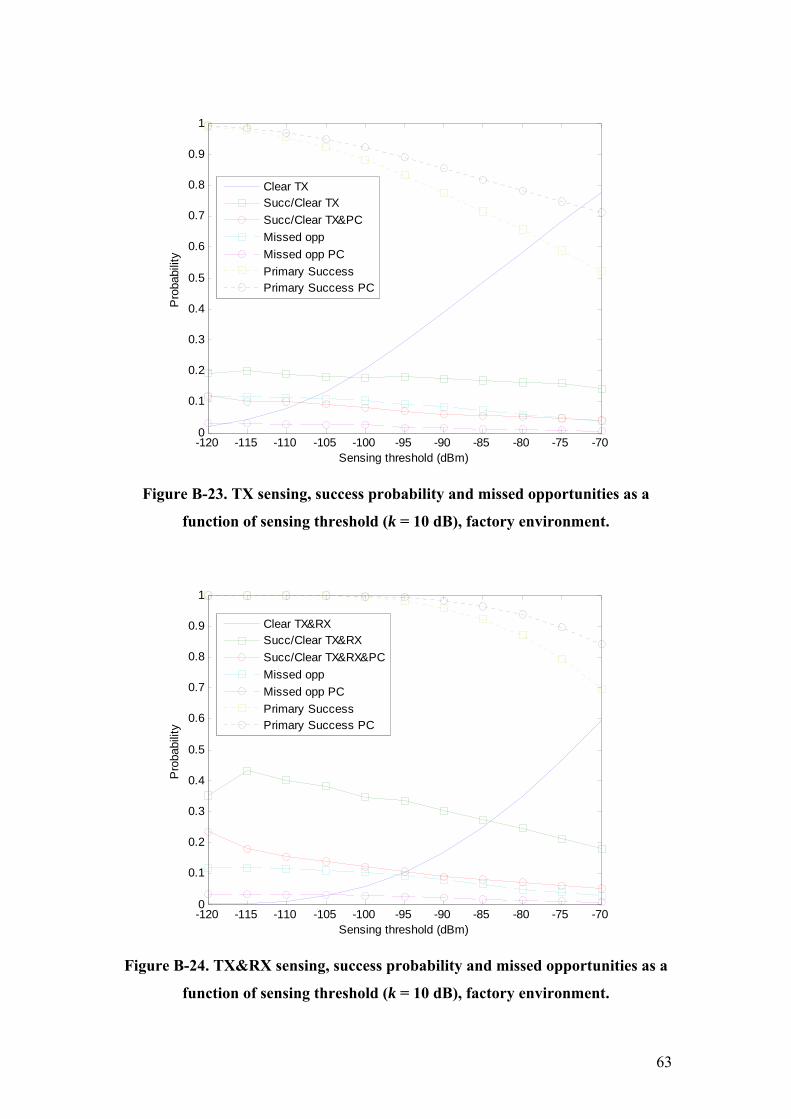
63
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TXSucc/Clear TXSucc/Clear TX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Figure B-23. TX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), factory environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Sensing threshold (dBm)
Pro
babi
lity
Clear TX&RXSucc/Clear TX&RXSucc/Clear TX&RX&PCMissed oppMissed opp PCPrimary SuccessPrimary Success PC
Figure B-24. TX&RX sensing, success probability and missed opportunities as a
function of sensing threshold (k = 10 dB), factory environment.
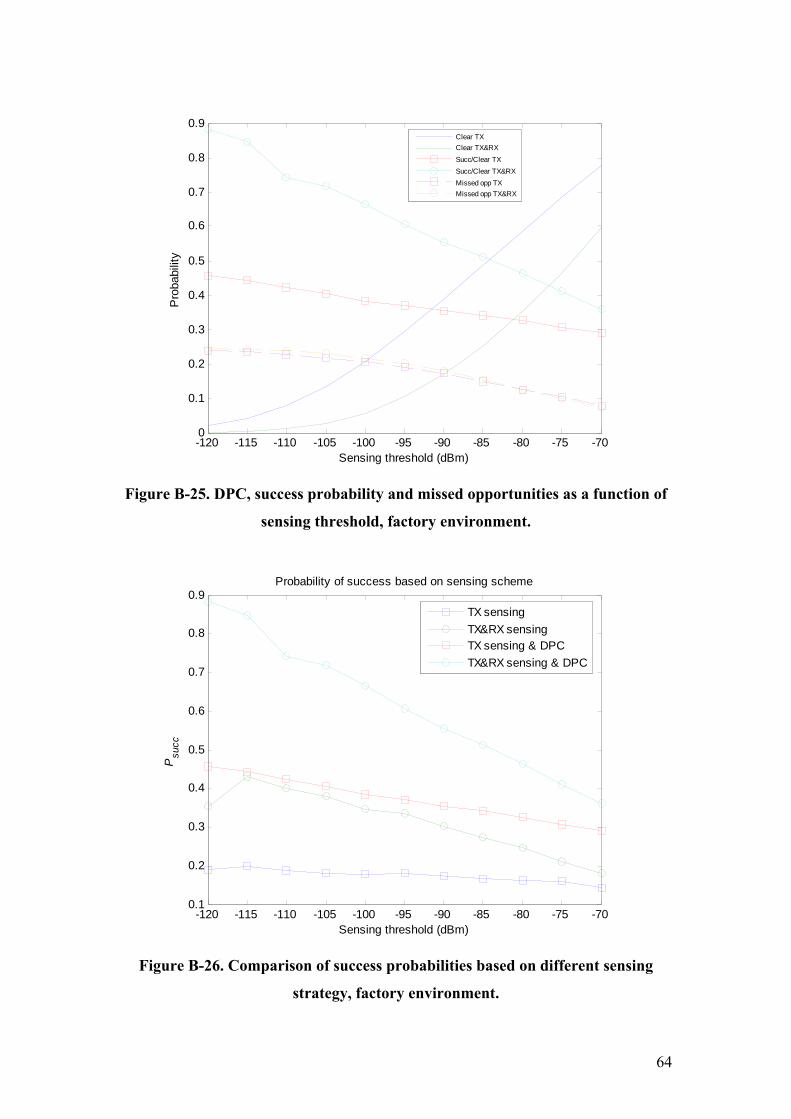
64
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Sensing threshold (dBm)
Pro
babi
lity
Clear TXClear TX&RXSucc/Clear TXSucc/Clear TX&RXMissed opp TXMissed opp TX&RX
Figure B-25. DPC, success probability and missed opportunities as a function of
sensing threshold, factory environment.
-120 -115 -110 -105 -100 -95 -90 -85 -80 -75 -700.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Sensing threshold (dBm)
Psu
cc
Probability of success based on sensing scheme
TX sensingTX&RX sensingTX sensing & DPCTX&RX sensing & DPC
Figure B-26. Comparison of success probabilities based on different sensing
strategy, factory environment.











![A multi-objective performance modelling framework for enabling … · 2020. 4. 2. · ing to new kinds of spectrum reuse, for example, intra-site spectrum reuse [5, 6] that has to](https://img.dokumen.tips/doc/110x75/6144891fb5d1170afb43efe7/a-multi-objective-performance-modelling-framework-for-enabling-2020-4-2-ing.jpg)

















