Embed Size (px)
Citation preview

Clearance Based Path Optimization for Motion Planning
Roland Geraerts and Mark OvermarsICRA 2004

Problem setting Low quality paths
Often long detours Discontinuity Unnecessary motions
Quality criteria Length Clearance Combination
Path Quality – Length
Post processing Path pruning Shortcut Partial shortcut

Path Quality – Length
Path pruning Fast and simple heuristic Translational dist. improves
considerably Rotation is more difficult to remove

Path Quality – Length
Shortcut More general than path pruning Simple technique Fast convergence

Path Quality – Length
Weakness of the shortcut heuristic Path can still contain many redundant
(rotational) motions Creating shortcuts on large portions
will fail Partial shortcut
Query path Shortcut Partial shortcut
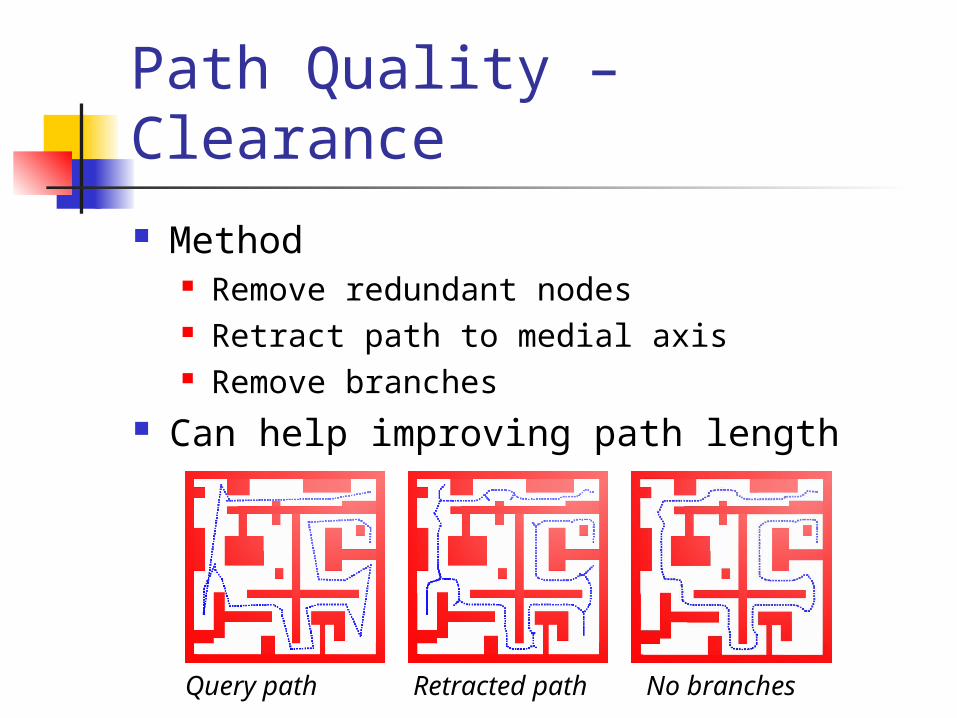
Path Quality – Clearance Method
Remove redundant nodes Retract path to medial axis Remove branches
Can help improving path length
Query path Retracted path No branches

Path Quality – Clearance
Retract path to medial axis Retract sample to medial axis
d2 x d
4 x d
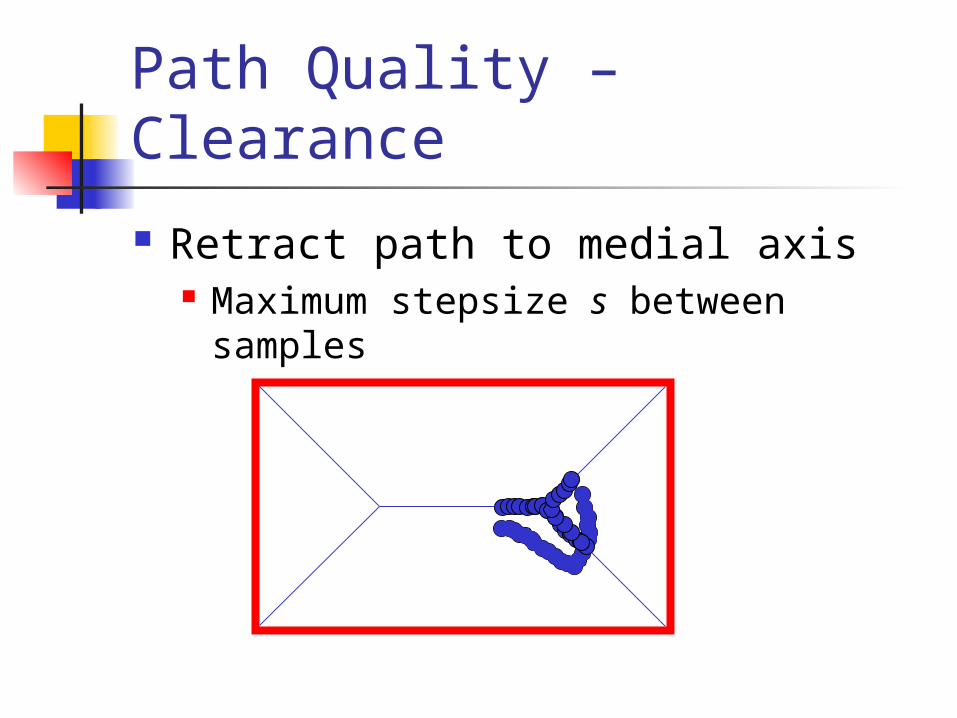
Path Quality – Clearance
Retract path to medial axis Maximum stepsize s between samples
Path Quality – Clearance
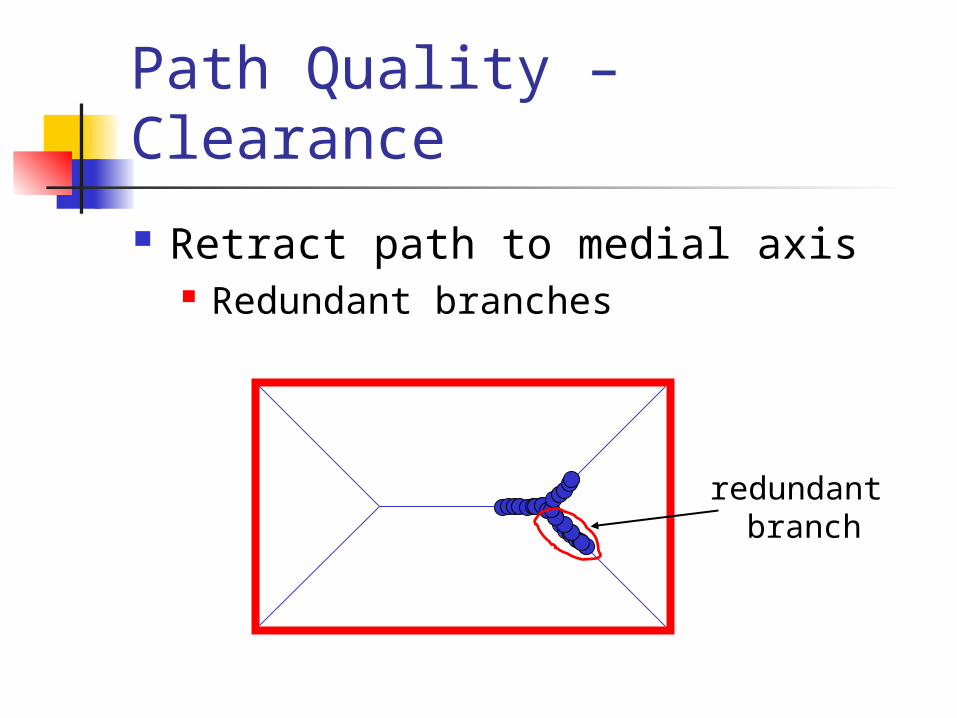
Retract path to medial axis Redundant branches
redundant branch
Path Quality – Clearance
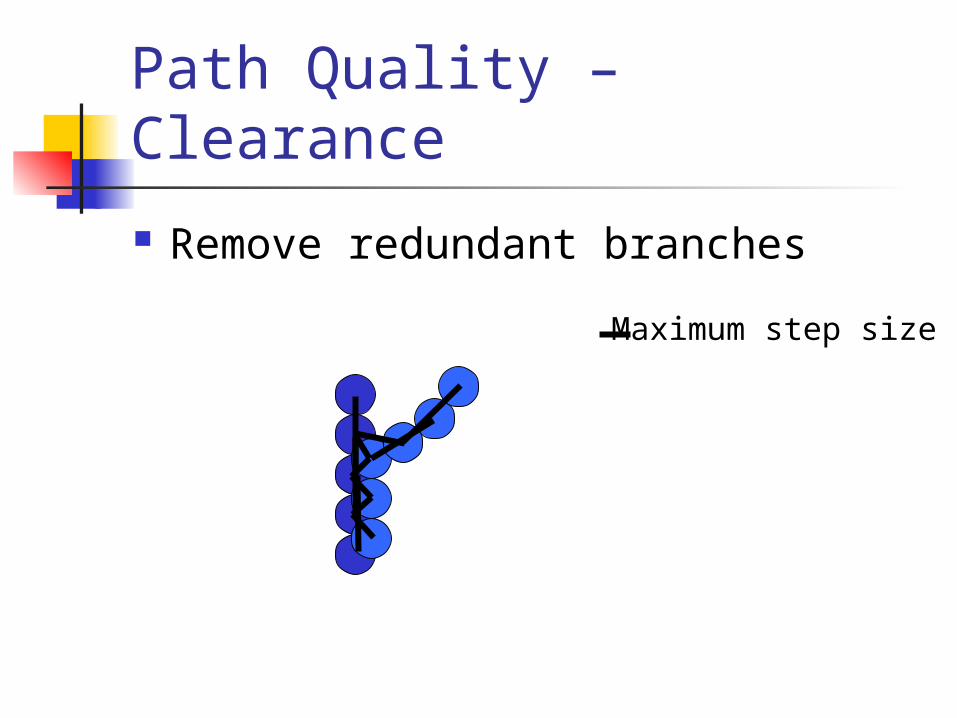
Remove redundant branches
Maximum step size

Path Quality – Combination Technique
Retract path to medial axis Increase size of robots Create partial shortcuts
Result Reasonable short path Path has a particular minimum
amount of clearance where it is possible
Experimental Setup – Path Length
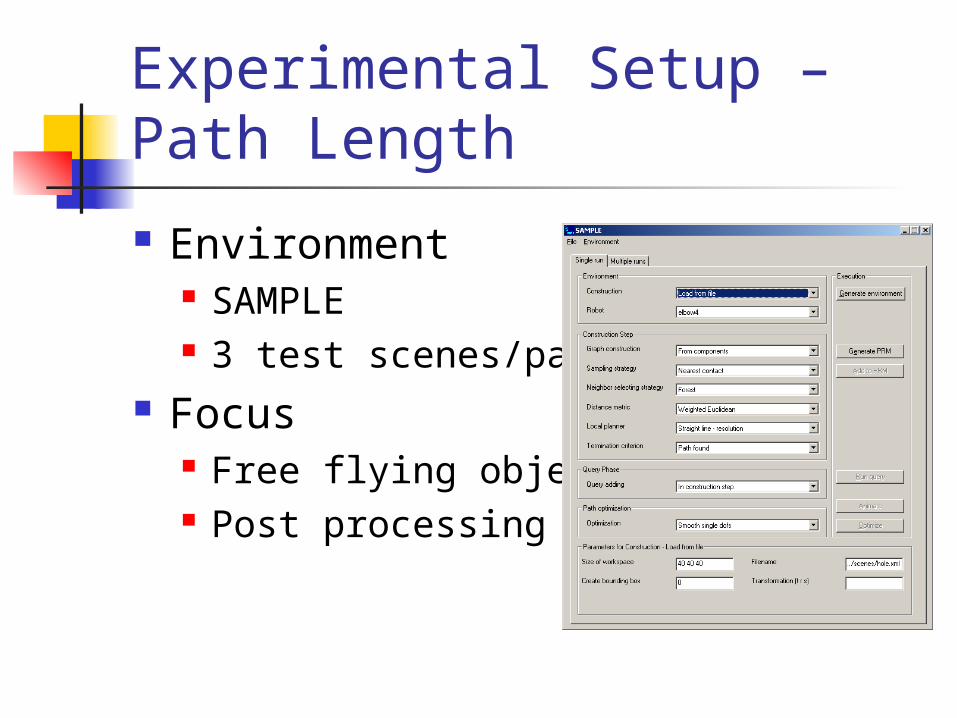
Environment SAMPLE 3 test scenes/paths
Focus Free flying objects Post processing

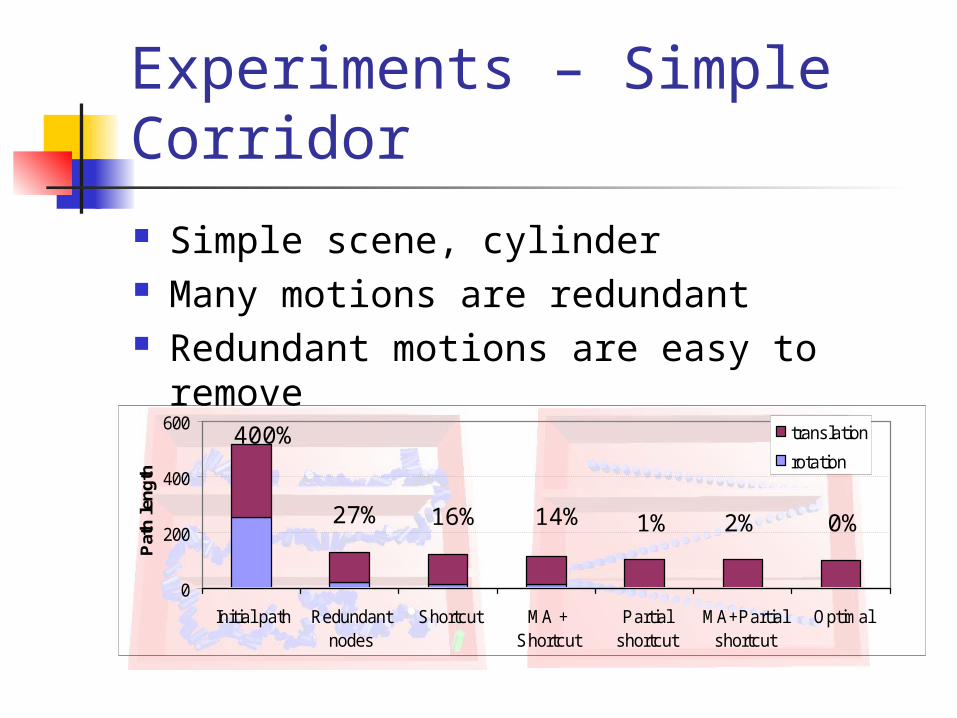
Experiments – Simple Corridor Simple scene, cylinder Many motions are redundant Redundant motions are easy to remove
Experiments – Simple Corridor Simple scene, cylinder Many motions are redundant Redundant motions are easy to remove
0
200
400
600
Initial path Redundantnodes
Shortcut MA +Shortcut
Partialshortcut
MA+Partialshortcut
Optimal
Pat
h l
eng
th
translation
rotation400%
27% 16% 14% 1% 2% 0%

Experiments – Corridor Elbow shaped object is forced to rotate Little clearance to corridors
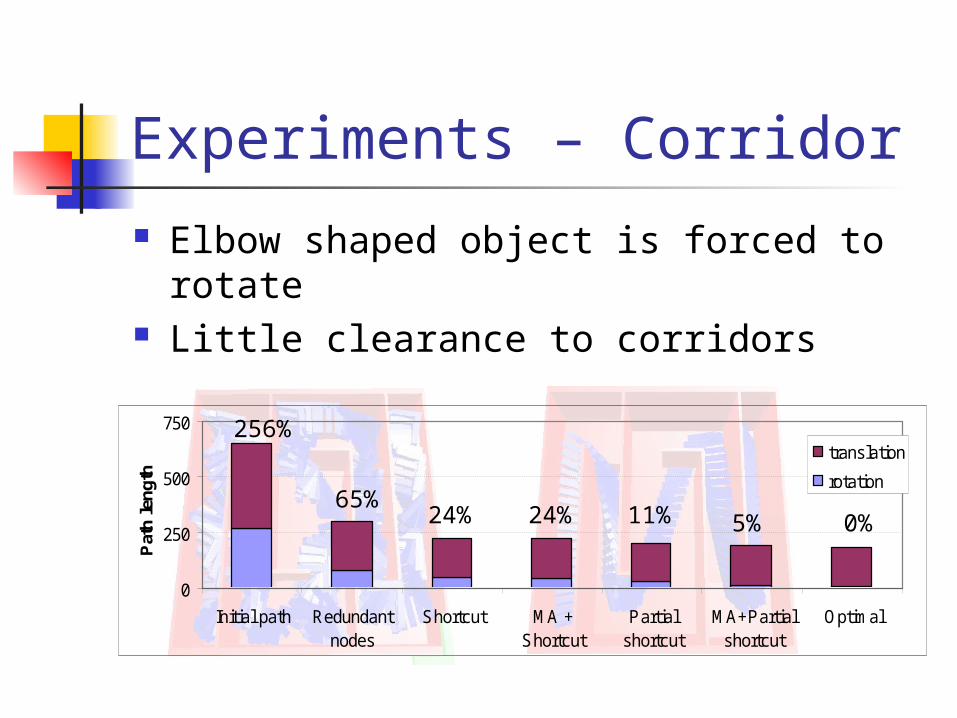
Experiments – Corridor Elbow shaped object is forced to rotate Little clearance to corridors
0
250
500
750
Initial path Redundantnodes
Shortcut MA +Shortcut
Partialshortcut
MA+Partialshortcut
Optimal
Pat
h l
eng
th
translation
rotation
256%
65%24% 24
%11% 5% 0%
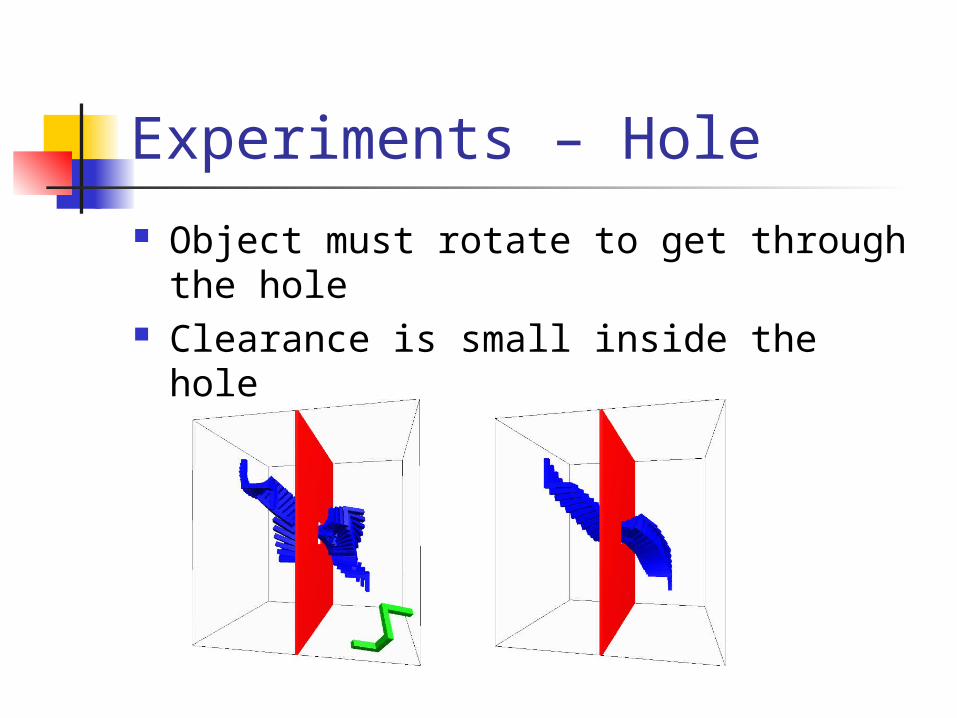
Experiments – Hole Object must rotate to get through the
hole Clearance is small inside the hole

Experiments – Hole Object must rotate to get through the
hole Clearance is small inside the hole
0
40
80
120
Initial path Redundantnodes
Shortcut MA + Shortcut Partial shortcut MA+Partialshortcut
Optimal
Pat
h le
ng
th
translation
rotation
41% 14% 0%
184%
112%
36%
23%
Future Work
Extension to other robot types
Preprocessing techniques