Embed Size (px)
Citation preview

B767
Electrical / Instrument Book 11
Chapter (ATA reference) Page
HORIZONTAL STABILIZER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3ELEVATORS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113RUDDER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165
29 August 2002 Page 1

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age2
TR
AIN
ING
NO
TE
S
FO
RE
WO
RD
UN
CO
NT
RO
LLED
CO
PY
TH
ES
EN
OT
ES
AR
EIN
TE
ND
ED
FO
RIN
ST
RU
CT
ION
AL
PU
RP
OS
ES
ON
LYA
ND
NO
RE
VIS
ION
SE
RV
ICE
WILL
BE
PR
OV
IDE
DT
OT
HE
HO
LDE
R
This
document
isissued
onthe
expresscondition
thatany
partor
allofits
contentsshallnot
byw
ayof
tradeor
otherwise,be
lent,re-sold,hiredoutorotherw
isecirculated
toany
otherpartyand/orC
ompany
withoutpriorw
rittenperm
issionof
QA
NTA
SA
irways
Ltd.

HORIZONTAL STABILIZER
Table of Contents
Subchapter Page
INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5STABILIZER TRIM COMPONENTS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19STCM HYDRAULIC OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31STABILIZER TRIM OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39ALTERNATE ELECTRIC MODE - VH-OGE AND ON. . . . . . . . . . . . . . . . . . . . . . . . . . 61STANDBY MANUAL MODE - VH-EAJ TO OGD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65STABILIZER TRIM FAULT INDICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75STABILIZER TRAVEL LIMITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89STABILIZER POSITION INDICATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95SUMMARY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
B767 − Electrical / Instrument Book 11 − Page 3

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age4
INT
EN
TIO
NA
LLYB
LAN
K

INTRODUCTION
B767 − Electrical / Instrument Book 11 − Page 5

General Description
The horizontal stabilizer is a moveable assembly that includes theelevator. Changes in the stabilizer angle of attack result in airplanemovement about the pitch axis.
The purpose of the stabilizer trim is to make long term changes inthe airplane pitch attitude (short term pitch changes are made by theelevator). Airplane pitch requirement change during flight due tochanges in the centre of gravity (cg), engine thrust and airspeedchanges.
Moving the stabilizer leading edge up results in airplane nose downtrim. Moving the stabilizer leading edge down results in airplanenose up trim.
27.40 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 6
M00081D5.PST
HORIZONTAL STABILIZER - INTRODUCTION

PITCH
STABILIZERHORIZONTALAXIS
62741AQA
g62741aq B767 − Electrical / Instrument Book 11 − Page 7HORIZONTAL STABILIZER - INTRODUCTION

General Description
The horizontal stabilizer pivots about hinges attached to airplanestructure. A ballscrew actuator is connected to the stabilizer frontspar. The ballsrew actuator assembly operates hydraulically. Twostabilizer trim control modules (STCM) control hyraulic power to theballscrew assembly.
Control
Control inputs are from three sources, manual electric trim switcheson the pilots wheels, alternate electric trim switches (or standbymanual levers) on the quadrant stand and from the FCCs. Two inputsare directed to two stabilizer trim and aileron lockout modules(SAM). The third input goes directly to the stabilizer trim controlmodules (STCM).
Operation
Manual control inputs from the pilot or autotrim inputs from theFCC to SAM result in trim outputs to both STCMs. These unitscontrol the operation of the ballscrew actuator that results inmovement of the stabilizer. The trim range is between 0 units and14.2 units in the airplane UP direction. When the stabilizer is at 2units it is in the neutral position. A safe takeoff (green band) range isprovided.
27.41 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 8
M000821C.PST
HORIZONTAL STABILIZER TRIM SYSTEM

ALTERNATE ELECTRIC TRIM CONTROL
TRIM CONTROLELECTRIC
TRIM CONTROLELECTRIC
(2)
ADC
FCC
(3)
SAM L
STCM: STABILIZER TRIM CONTROL MODULE
SAM R
SWITCHESTRIMELECTRICMANUAL
SWITCHESTRIMELECTRICALTERNATE
ASSEMBLYACTUATOR
STABBALLSCREW
RANGETRIM
STABILIZER
STCM L
STCM R
L SYS
C SYSPOWERHYDRAULIC
POWERHYDRAULIC
SAM : STABILIZER TRIM AND AILERON LOCKOUT MODULEFCC : FLIGHT CONTROL COMPUTERADC : AIR DATA COMPUTER
G62741AV
1
1 VH-OGE OND ONPRIOR TO VH-OGE MANUAL LEVER ANDCABLES USED FOR ALTERNATE TRIM
g62741av B767 − Electrical / Instrument Book 11 − Page 9HORIZONTAL STABILIZER TRIM SYSTEM

General Description
Pitch trim of the airplane occurs when the stabilizer is moved leadingedge up or down. Hydraulic power drives a ballscrew attached to thestabilizer centre section front spar, which causes it to rotate about afthinges that are connected to fuselage structure.
Power is supplied from the left and centre hydraulic systems to twostabilizer trim control modules (STCM). Flow from these modules totwo hydraulic motors is controlled by electrical inputs. Airspeedchanges sensed by a elevator feel computer will modify trim rate.
Control
Stabilizer movement is controlled manually by the pilot or by theautoflight system.
Manual Control
The pilot can make control inputs from switches on the controlwheel (manual electric trim), or by moving switches on the controlstand (alternate electric trim). Levers on earlier aircraft (standbymanual trim).
Autoflight Control
When one or more flight control computers (FCC) are selected on,signals are sent to a stabilizer trim and aileron lockout module(SAM). Under certain conditions this module also provides machtrim control.
Stabilizer Trim and Aileron Lockout Modules (SAM)
These modules get signals from the pilot, flight control computer(FCC) and air data computer (ADC). Using these inputs they controlall modes of stabilizer operation except for alternate electric trim (orstandby manual trim). In this mode control is sent directly to theSTCM’s.
Operation
Hydraulic motors power a ballscrew actuator assembly to drive aballscrew. The motors cannot operate until a brake is released. Motorand brake operation is controlled by the L and R STCM. Shut off,solenoid and rate control valves are installed in the STCM forhydraulic flow control.
The shut off valves are open when hydraulic cutout switches on thecontrol stand are in the normal position.
The control and arm solenoid valves are energized by pilot orautoflight inputs. The rate control valve position is changed by theelevator feel computer as airspeed changes.
Manual Electric Trim
When either pilot moves the arm and control trim switches on thecontrol wheel, inputs go through both SAM’s to both STCM’s.
27.41 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 10
M0014025.PST
HORIZONTAL STABILIZER TRIM BLOCK DIAGRAM

SAM :
FCC :STCM:
ADC : AIR DATA COMPUTERSTABILIZER TRIM AND
FLIGHT CONTROL COMPUTERSTABILIZER TRIM CONTROL MODULE
AILERON LOCKOUT MODULE
FSPM: FLAP/STAB POSITION MODULE
SWITCHESCUTOFF
SWITCHESCUTOFF
ELEVATOR
ELEVATOR
STABILIZER
FSPM (3)
ASSEMBLYACTUATOR
BRAKEANDMOTORHYDR
BRAKEANDMOTORHYDR
COMPUTERFEELELEVATOR
FCC C
HYDRPOWER
VALVESSOLARM
VALVESSOLCONTROLVALVECONTROLRATE
VALVEOFFSHUT-
POWERHYDR
STCM R
SIGNALTRIM ARM
SIGNALTRIM ARM
TRIM CONTROL SIGNAL
TRIM CONTROL SIGNAL
COMMANDSTRIMELECTRICMANUAL
ADC R
FCC RARM
CONTROL
AUTO TRIM COMMANDS
SAM R
ARM
CONTROL
AUTO TRIM COMMANDS
FCC L
ADC L
TRIMELECTRICMANUAL
SAM L
MECHANICAL
ELECTRICAL
HYDRAULIC
DATA BUS
STCM L
EICAS COMPUTER (2)
UNSCHEDSTAB TRIM
TRIMSTAB
P5 PANEL
ALTERNATE ELECTRIC TRIM COMMANDS
HYDRAULIC CUTOUT SWITCHES
ARMCONTROL
XMTRSPOSITION
SWITCHESLIMIT
LIMIT SWITCHAND POSITIONTRANSMITTERMODULES (3)
L
C SYS
L SYS
R
C
RIGHT
LEFT
CENTER
BALLSCREW
BALLSCREW
TO FCC& SAM
AUTOTRIM
TRIMMACH
COLUMNS
COLUMNS
POSITIONINDICATOR
(TYP)
1
62741ADA
ALTERNATE OPERATION FAULT INHIBIT
ALTERNATE OPERATION FAULT INHIBIT
STANDBY MANUAL TRIM COMMANDSOR
P 50
g62741ad B767 − Electrical / Instrument Book 11 − Page 11HORIZONTAL STABILIZER TRIM BLOCK DIAGRAM

Manual Electric Trim (Continued)
The arm signal is directed through cutoff switches, controlled byelevator column movement, and limit switches. These switches are inthe left/right position transmitter modules that are cable driven bystabilizer movement.
Trim rate is maximum in this mode i.e. dual motor operation.
Autoflight Trim
FCC auto stabilizer trim signals are sent to one SAM. The controland arm outputs that result use the same path as described undermanual electric trim.
If the pilot or FCC is not making a trim input, mach trim circuits inthe SAM will control trim operation using ADC inputs.
Trim rate in these modes is half of maximum as only one STCM iscontrolling one hydraulic motor/brake combination.
Autoland mode with multi-channel engage of the autopilot canoperate at dual motor rate if required.
Limit Switch and Position Transmitter Modules (3)
The modules are designated left, right and centre and are driven bycables when the stabilizer moves. They contain limit switches andposition transmitters that set maximum stabilizer travel and providethe indication of stabilizer movement. Outputs from the modules aresent to three flap/stabilizer position modules (FSPM) that returnsignals to SAM and the FCC.
Fault Indication
SAM circuits sense faults that are displayed on EICAS. They areUNSCHED STAB TRIM (B level) and STAB TRIM (C level) .
27.41 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 12
M0014025.PST
HORIZONTAL STABILIZER TRIM BLOCK DIAGRAM(Continued)

SAM :
FCC :STCM:
ADC : AIR DATA COMPUTERSTABILIZER TRIM AND
FLIGHT CONTROL COMPUTERSTABILIZER TRIM CONTROL MODULE
AILERON LOCKOUT MODULE
FSPM: FLAP/STAB POSITION MODULE
SWITCHESCUTOFF
SWITCHESCUTOFF
ELEVATOR
ELEVATOR
STABILIZER
FSPM (3)
ASSEMBLYACTUATOR
BRAKEANDMOTORHYDR
BRAKEANDMOTORHYDR
COMPUTERFEELELEVATOR
FCC C
HYDRPOWER
VALVESSOLARM
VALVESSOLCONTROLVALVECONTROLRATE
VALVEOFFSHUT-
POWERHYDR
STCM R
SIGNALTRIM ARM
SIGNALTRIM ARM
TRIM CONTROL SIGNAL
TRIM CONTROL SIGNAL
COMMANDSTRIMELECTRICMANUAL
ADC R
FCC RARM
CONTROL
AUTO TRIM COMMANDS
SAM R
ARM
CONTROL
AUTO TRIM COMMANDS
FCC L
ADC L
TRIMELECTRICMANUAL
SAM L
MECHANICAL
ELECTRICAL
HYDRAULIC
DATA BUS
STCM L
EICAS COMPUTER (2)
UNSCHEDSTAB TRIM
TRIMSTAB
P5 PANEL
ALTERNATE ELECTRIC TRIM COMMANDS
HYDRAULIC CUTOUT SWITCHES
ARMCONTROL
XMTRSPOSITION
SWITCHESLIMIT
LIMIT SWITCHAND POSITIONTRANSMITTERMODULES (3)
L
C SYS
L SYS
R
C
RIGHT
LEFT
CENTER
BALLSCREW
BALLSCREW
TO FCC& SAM
AUTOTRIM
TRIMMACH
COLUMNS
COLUMNS
POSITIONINDICATOR
(TYP)
1
62741ADA
ALTERNATE OPERATION FAULT INHIBIT
ALTERNATE OPERATION FAULT INHIBIT
STANDBY MANUAL TRIM COMMANDSOR
P 50
g62741ad B767 − Electrical / Instrument Book 11 − Page 13HORIZONTAL STABILIZER TRIM BLOCK DIAGRAM
(Continued)

Stabilizer Compartment
• Access: Access to the stabilizer compartment is by opening theservice door on the bottom side of the aft fuselage.
• Components: The stabilizer is moved by the operation of aballscrew actuator assembly that includes two hydraulic motorsand brakes. The assembly is attached to the structure of thestabilizer compartment ceiling.
Two STCMs are mounted on structure above the ballscrew actuatorassembly.
Three limit switch and position transmitter modules are located at thebottom of the compartment below the front spar of the stabilizercentre section.
Flight Compartment
• Components: Two alternate electric trim switches are located onthe left side of the control stand - 300 aircraft(OGE-999).
• Two standby manual trim levers located in the P10 quadrantstand, provide mechanical (cable) input to the STCM - 200 -300aircraft (OGA-OGD).
• Two guarded hydraulic cutout switches are located on the left sideof the control stand, behind the alternate electric trim switches.
• Two stabilizer position indicators are located on the control stand,one on either side of the thrust levers.
• Two manual electric trim switches for each pilot are located onthe outboard side of each control wheel.
• Stabilizer fault indication messages are displayed on EICAS, andby lights located on the overhead panel (P5).
Forward Equipment Compartment
• Access : Access to the forward equipment compartment is byopening a hatch located forward of the nose wheel well, on thebottom of the fuselage.
• Components: Elevator control column cutoff switches aremounted on the outboard end of the elevator column torque tubes.
Main Equipment Centre
• Access: Access to the main equipment centre is by opening ahatch located aft of the nose gear wheel well, on the bottom ofthe fuselage.
• Components: Two SAM’s are located in their respective CSEU,the left SAM on the E1 rack and the right SAM on the E2 rack.
• Three flap/stab position modules ( FSPM) are installed in the P50card file located on the forward right side of the main equipmentcentre.
27.41 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 14
M0008239.PST
HORIZONTAL STABILIZER TRIM SYSTEM COMPONENT LOCATIONS

(TYP)CONNECTORELECTRICAL
FSPM(TYP)
STABILIZER BALLSCREW ACCESS AREA
MAIN EQUIP CTR
119AL
LIMIT SWITCH &POSITION TRANSMITTERMODULES (3)
MOTORS (2)HYDRAULIC
ELEC SYS CARD FILE, P50
MODULE(TYP)
MAIN EQUIPCTR ACCESS,
P50
BALLSCREWACTUATORASSEMBLY
HYDRAULICBRAKES (2)
STABILIZER TRIMCONTROL MODULES (STCM)
PIVOT POINTSTABILIZER
CENTER SECTIONSTABILIZER
TRIM SWITCHESMANUAL ELECTRIC
EICAS DISPLAY
PANEL (P5)
PANEL ANNUNCIATOR
PILOTS OVERHEAD
TRIM SWITCHESMANUAL ELECTRIC
(UNDER FLOOR ON
CONTROL COLUMN)CAPT AND F/O
CUTOUT SWITCHESCONTROL COLUMN MAIN EQUIPMENT CENTER
QUADRANT STAND (P10)
SWITCHESCUTOUTHYDRAULIC
INDICATORPOSITION
INDICATORPOSITION
FWD
TRIM SWITCHESALTERNATE ELECTRIC
R SAM(E2-1)
L SAM(E1-1)
G62741AZ
1
1 767-200 and EARLY 767-300 A/C ONLY
STANDBY MANUALTRIM LEVERS
2
2
767-300 AIRCRAFT ONLY (VH-OGE & ON)
.
g62741az B767 − Electrical / Instrument Book 11 − Page 15
HORIZONTAL STABILIZER TRIM SYSTEM COMPONENTLOCATIONS

Flight Compartment Indications
Both SAMs monitor fault conditions and display them on EICAS andthe pilots overhead panel.
When the stabilizer moves without a command or it moves in thedirection opposite to the one commanded, the EICAS caution (B)level message UNSCHD STAB TRIM appears. Also, the UNSCHEDSTAB TRIM amber light illuminates on the pilot’s overhead panel(P5).
When only one motor and brake is powered during a valid manualelectric trim input, the EICAS advisory (C) level message STABTRIM appears. Also the STAB TRIM amber light illuminates on thepilot’s overhead panel (P5).
When a fault ball is set on a SAM, the maintenance level messageSTAB TRIM is recorded.
Position Indication
A tape type stabilizer position indicaton, in units of trim, is locatedon each side of the control stand (P10). The indicators show thestabilizer position. A green band on the indicator identifies thestabilizer safe takeoff range.
Main Equipment Centre Indications
Fault balls set on the face of the SAM’s identify faults within thestabilizer control system.
27.48 − HORIZONTAL STABILIZER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 16
M0008895.PST
STABILIZER TRIM INDICATION

SAM (L) E1-1 SHELFSAM FACEPLATE
LOWER EICAS DISPLAY
AUTOSPDBRK a
aR AOA
a
ACCESSDOORS
L TATa
aL AOA
a
CARGODOORS
RUDDERRATIO a
SPOILERSa
a
R AUXPITOT
a
F OPITOT
a
EMERDOORS
a
UNSCHEDSTAB TRIM
STABa
a
L AUXPITOT
a
CAPTPITOT
a
ENTRYDOORS
ANTISKIDa
L ENGPROBE a
BODYVANE a
R TATa
AILLOCK a
R ENGPROBE a
w ww w
w
ANNUNCIATOR PANEL (P5)
TRIM
PERFAPU
CONFMCDP
ENG
EICAS MAINTDISPLAY SELECT AUTO MANEVENT
REC ERASE
ECSMSG
ELECHYD
TEST
EXCD
READ
P61 SIDE PANEL
STABILIZER POSITIONINDICATORS (P10)
SAM (R) E2-1 SHELFMAIN EQUIPMENT CENTER
FCC
FSPM/
R. AIL LOCK ACT/FSEU
ADC
STCM
COL TRIM SW
AIR-GND RELAY
MAN LEVER SW
L. AIL LOCK ACT/ELEV ASY L ACT
SAM
RESET
SPM
HYD PRESS SW
INTERFACING LRU’S
767
757
UPPER EICAS DISPLAY
STAB TRIM
STAB TRIM
UNSCHD STAB TRIM
62741CBA
"B" "C"
CANCEL RECALL
CONFIGR
P1-3
g62741cb B767 − Electrical / Instrument Book 11 − Page 17STABILIZER TRIM INDICATION

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age18
INT
EN
TIO
NA
LLYB
LAN
K

STABILIZER TRIM COMPONENTS
g62741cb B767 − Electrical / Instrument Book 11 − Page 19

General Description
The two stabilizer trim and aileron lockout modules (SAM) controlor monitor all operations of the stabilizer.
The SAM faceplate contains 11 fault balls which identify faultedcomponents in the system. Pushing the reset switch on the faceplateresets all fault balls.
Location
There are two identical SAM’s located in the main equipment centre.One is in the left CSEU and the other is in the right CSEU. Themodules are interchangeable.
Operation
Electric inputs to the SAM circuits are made by the pilot’s and theFCC’s.
Outputs from the SAM’s go to the stabilizer trim circuits.
Maintenance Practices
SAM cards are not line replaceable ( LRU ’s). If an internalmalfunction occurs, the module is removed and replaced. Fault ballindications are covered later in the course.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 20
M00085EA.PST
STABILIZER TRIM AND AILERON LOCKOUT MODULE

LEFT CSEU(E1-1)
RIGHT CSEU(E2-1)
MAIN EQUIPMENT CENTER
SCMSCMSCMPSM
ELEV ASY L ACT
HYD PRESS SW
SPM
RESET
SAM
L. AIL LOCK ACT/
MAN LEVER SW
AIR-GND RELAY
COL TRIM SW
STCM
ADC
757767/INTERFACING LRU’S
FSEUR. AIL LOCK ACT/
FSPM/
FCC
PSM1L2L3L2L
L SAML YDM1LRCM
L
ARRANGEMENT OF MODULESIN EACH CSEU - (FACING AFT)
________________________
FWD
L AND R SAM
62741BQA
g62741bq B767 − Electrical / Instrument Book 11 − Page 21STABILIZER TRIM AND AILERON LOCKOUT MODULE

Operation
The stabilizer trim controls are used to input manual electric ARMand CONTROL commands to the digital stabilizer trim and aileronlockout modules ( SAM’s). Each switch set contains an ARM and aCONTROL portion and is a three-position switch spring loaded tothe OFF position. Both switches (ARM and CONTROL) moveddown results in an aircraft nose up trim command and both switchesmoved up results in an aircraft nose down trim command.
Location and Access
There are two sets of switches located on the outboard horn of thecaptain’s and first officer’s control wheel. Access to the switches isfrom the flight compartment.
Maintenance Practices
The switches may be replaced without removing the control wheelby removing 2 screws on the back of each switch and 1 screw on themedallion plate; then using a special insertion/extraction tool, removethe 5 color coded wires from the connector and remove the switch.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 22
M000825F.PST
STABILIZER TRIM CONTROL SWITCHES

SCREW
MEDALLION
STABILIZER TRIMCONTROL WHEEL SWITCHES
CONNECTOR(5 PLACES)
CAPTAIN’S CONTROL WHEEL SHOWN(F/0’S CONTROL WHEEL OPP.)
STABILIZER TRIMCONTROL WHEEL SWITCHES
SCREW(2 PLACES)
CONTROL WHEEL HANDLE
62741ARA
g62741ar B767 − Electrical / Instrument Book 11 − Page 23STABILIZER TRIM CONTROL SWITCHES

Operation
The column cutoff switches employ the pilots natural reaction tocorrect a runaway stabilizer condition.
The stabilizer trim control column switches provide manual overrideof any electric trim command in the event of a runaway stabilizer byinterrupting the arm trim command when the elevator control columnis moved in a direction opposite to the trim command. The normallyclosed switches are opened by control column movement fore or aft.Column movement forward greater than 2.2 degrees to 2.7 degreeswill interrupt airplane nose up stabilizer trim. Column movement aft2.0 to 2.5 degrees will interrupt airplane nose down stabilizer trim.
On the –200 Aircraft when the stabilizer position is between 8.5 and14.2 units (to the mechanical stop), the control column is physicallymoved aft by the elevator neutral shift mechanism to change theelevator neutral from faired to a Max of 5.8° UP at 14.2 units.
NOTE: Elevator Neutral Shift will be covered under the Elevatorsection.
Because of this shift of the control column aft, at 8.5 units the aftcutoff switches are swapped to a set of 3.0° to 3.5°cutoff switches.These switches will now be used to interrupt a runaway nose downstabilizer trim.
Location and Access
There are four switches (five on –200 Aircraft) located on eachoutboard end of the elevator control column torque tube. Access tothe switches is through the forward equipment centre access door.From OGM and on, each switch has a back up switch in parallelmaking a total of eight switches.
Adjustment/Rigging
The stabilizer trim system and then the elevator system must berigged prior to switch adjustment.
Each switch has an actuation bolt. A stop bolt ensures switch closureand the switch actuation bolt ensures switch opening at the propercontrol column displacement angle.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 24
M0008287.PST
ELEVATOR CONTROL COLUMN CUTOFF SWITCHES

SEE A
TORQUE TUBESELEVATOR
SEE A
LEFTCOLUMN
COLUMNRIGHT
CRANK
TORQUE TUBE
(TYP)STOP BOLT
ELEVATOR
ELEVATOR
TUBE PIVOT
STOP
CAM
TORQUE
(TYP)
(TYP)SWITCH
BOLT (TYP)SWITCH ACTUATING
SPRING
COLUMN CUTOUT OPERATION
COLUMN AFT>2.0 TO 2.5
(TYP)STOP BOLT
COLUMN
TO 2.7FWD >2.2
A
STOP(TYP)
CAM
UP
FWD
CRANK
LEFT SIDE SHOWN
ELEVATORTORQUE TUBE
G62741AS
COLUMN AFT AFT >3 TO 3.5
1
1
EXTRA SET OF AFT SWITCHESON -200 AIRCRAFT WITH NEUTRALSHIFT
g62741as B767 − Electrical / Instrument Book 11 − Page 25ELEVATOR CONTROL COLUMN CUTOFF SWITCHES

General Description
The STCMs receive electrical command inputs to control porting ofhydraulic power to the hydraulic motors and the hydraulicallyreleased secondary brakes of the stabilizer trim ballscrew actuatorassembly.
Location and Access
Two interchangeable STCMs, one right and one left, are mounted onthe bulkhead above the stabilizer ballscrew actuator assembly in thestabilizer compartment.
Components
Each STCM has seven hydraulic ports and four electrical connectors.A cleanable in-line filter screen, 100 micron, is installed in thesystem pressure port. Four dual coil solenoid valve assemblies, forairplane nose up and nose down, ARM and CONTROL, receive theelectrical input commands.
A pressure switch, operating at 750–1000 psi, monitors the hydraulicpressure applied to the secondary brake and signals both SAMs. A 28volt dc motor operated shutoff valve is located on the lower side ofthe STCM. The shutoff valve has a lever indicating the position ofthe valve and is used for manual override. A brake bypass button islocated on the lower side of the STCM.
Maintenance Practices
The line replaceable units of the STCMs are the four dual coilsolenoid valves, the motor operated hydraulic shutoff valve, the brakebypass button assembly and the hydraulic pressure switch.
When the manual brake bypass button on the STCM is pushed,pressure to release the secondary brake is blocked (ported to return)and the brake stays on. This demonstrates that the secondary brake iscapable of preventing operation of a pressurized hydraulic motor.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 26
M000832D.PST
STABILIZER TRIM CONTROL MODULE (STCM)

FWD
BUTTON
BRAKEBYPASS
SWITCHPRESSURE
CONTROL NOSEUP SOLENOID
ARM NOSE UPSOLENOID
ARM NOSE DOWNSOLENOID
APL NOSE
CONTROL NOSEDOWN SOLENOID
APL NOSEUP PORT
BRAKE
PORTRELEASE
RETURNPORT
RETURN PORTELEVATOR FEEL PORT
ON TOP OF MODULE (NOT SHOWN):
PRESSURE PORT (FILTER SCREEN)
DOWN PORT
MOTOR OPERATEDSHUTOFF VALVE(MANUAL OVERRIDENOT SHOWN)
62741BCA
g62741bc B767 − Electrical / Instrument Book 11 − Page 27STABILIZER TRIM CONTROL MODULE (STCM)

General Description
The hydraulic cutout switches control power directly to the hydraulicshut off valves on the STCMs. The valves are operated to stophydraulic flow through the STCMs for maintenance or in a runawaytrim condition.
Cutout Switches and Shut off Valves
Two guarded cutout switches are located on the top left side of thecontrol stand. The shut off valves, located on the lower side of eachSTCM, are operated by 28 volt dc electric motors.
Operation
The left switch controls the shut off valve on the left STCM , (lefthydraulic system) and the right switch the valve on the right STCM ,(centre hydraulic system).
When the guard is down the switches are in the NORM position andthe shut off valves are open. Placing the cutout switches in theCUTOUT position powers the shut off valves to close.
Maintenance Practices
Access to the switch wiring is by removal of the engine fuel shut offcontrol panel, M73.
The hydraulic cutout switches are used for functional tests of thestabilizer trim system. When both cutout switches are in theCUTOUT position, hydraulic power to the STCM’s is inhibited andthe stabilizer operation is disabled. When only one cutout switch isin the CUTOUT position, the stabilizer will operate at half speed asonly one hydraulic motor can trim.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 28
M00082AB.PST
HYDRAULIC CUTOUT SWITCHES AND SHUT OFF VALVES

R STAB TRIM
CUT OUT
NORM
L STAB TRIM
CUT OUT
NORM
FUEL CONT (P10)
NORM
CUTOUTL
STAB TRIM
C13
C12
C1529R STABTRIM SOV
C1528L STABTRIM SOV
28V DCSTBY24-54-73
P11-1 CIRCUIT BREAKER PNL
C
CUTOUT SWITCHESSTABILIZER HYDRAULIC
SOV
SOV
R STAB TRIM CONTROL MODULE
L STAB TRIM CONTROL MODULE
M
M
CLOSE
OPEN
CLOSE
OPEN
HYD SHUTOFFVALVE (SOV)
62741ATA
g62741at B767 − Electrical / Instrument Book 11 − Page 29HYDRAULIC CUTOUT SWITCHES AND SHUT OFF VALVES

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age30
INT
EN
TIO
NA
LLYB
LAN
K

STCM HYDRAULIC OPERATION
g62741at B767 − Electrical / Instrument Book 11 − Page 31

General Description
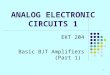
The rate of speed of stabilizer trim depends upon the elevator feelcomputer output pressure and whether one or two hydraulic motorsare driving the stabilizer.
Hydraulic Variable Flow Rate
The rate control valve on each STCM receives a hydraulic pressuresignal from the elevator feel computer to meter hydraulic flow to themotors as airspeed changes.
Full hydraulic flow is ported to the motors at low airspeed. Asairspeed increases, the flow gradually reduces to a minimum of 40percent of full flow.
Two Motor Operation
When the two hydraulic motors are operating, the stabilizer movestwice as fast as one motor operation. A command from the alternateelectric trim switches (or STBY Manual) or the manual electric trimswitches results in the two motor operation.
One Motor Operation
When only one motor operates, the speed of the stabilizer trim isreduced by one half. One motor operates in the auto trim mode,mach trim mode or during a failure of the other motor.
27.41 − HORIZONTAL STABILIZER − STCM HYDRAULIC OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 32
M0008681.PST
STABILIZER TRIM RATE

0 1000 1200 1400280 900
0
0.2 DEG/SEC
0.1 DEG/SEC
800600400200
160 180 198 270 427 KNOTS
0.5
0.1
0.2
0.3
0.4
0.25 DEG/SEC
ST
AB
ILIZ
ER
TR
IM R
AT
E -
DE
G/S
EC
0.5 DEG/SEC
TWO MOTORSOPERATING
ONE MOTOROPERATING
G62741AI
.
AIRSPEED
ELEVATOR FEEL COMPUTER OUTPUT PRESSURE
g62741ai B767 − Electrical / Instrument Book 11 − Page 33STABILIZER TRIM RATE

Purpose
The purpose of the STCM’s is to provide direction and rate controlfor the operation of the ballscrew actuator.
The left STCM receives hydraulic power from the left hydraulicsystem, the right STCM from the centre hydraulic system.
Component Description
• There is a cleanable 100 micron in-line filter in the inlet port.• A hydraulic shut off valve controls flow through the STCM. The
valve is commanded open or closed by the hydraulic cutoutswitches in the flight compartment.
• A rate control valve, operated by hydraulic pressure from theelevator feel computer, regulates flow to the hydraulic motor as afunction of airspeed.
• Two spool valves operate in series to control flow to the motorand secondary brake. One valve is the arm valve and the otherthe control valve. The valves have three positions: nose up, nosedown and centered null. They are centered by springs andhydraulic pressure. Varying the pressure on either end of thevalves causes them to move. In the null position the valves stophydraulic flow. Operation of the nose up and nose down arm andcontrol solenoid valves control the pressure to the end of thevalves.
• A brake pressure switch monitors hydraulic pressure to thesecondary brake. The electrical signal from the pressure switch issent to both SAM’s.
• A manual brake bypass valve, operated when the brake bypassbutton is pushed, depressurizes the secondary brake.
Operation - No Control Input
Without a control input the four solenoid valves direct pressure toeach end of the control and arm valves and they remain centered.There is no flow to the brake and motor.
27.41 − HORIZONTAL STABILIZER − STCM HYDRAULIC OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 34
M00083FC.PST
STABILIZER TRIM CONTROL MODULE FUNCTION - NO CONTROL INPUT

SECONDARYBRAKE
(PRESSURERELEASED)
SECONDARY L STAB TRIM CONT
PREVENTS CWBACK-DRIVE
DISCBRAKE
PREVENTS CCWBACK-DRIVE
ELEVATORFEEL CMPTR-L
27-30-01
FLIGHT CONTROLS HYD DISTR-L
27-00-01
FLIGHT CONTROLS HYD DISTR-CTR
27-00-01
ELEV FEEL CMPTR-CTR
27-30-01
NULL
NULL
BALLSCREWACTUATOR ASSY
HYD MOTOR
WL239
STABILIZER
STA 1805
ELEVFEEL
GEARBOX
HYD MOTOR
PRESSUREBRAKE RELRETURN 2
METERED PRESSURE
RETURN
SYSTEM PRESSURE
R STAB TRIM CONTM212
MOTOR OPERATED VALVE
"ARM" APL NOSE
UP SOL
"ARM" APL NOSE
DN SOLELEV FEELRETURN 1PRESSURE
"CONTROL" APL NOSE
UP SOL
MANUALBRAKEBYPASS"CONTROL" VALVE
"ARM" VALVE
RATE CONTROLVALVE
"CONTROL" APL NOSE
DN SOL
PRESSURE- BRAKERELEASE
PRIMARY BRAKE (RATCHED)
M211
INTERNALS SAME AS M212
PRESSURE
BRAKE(PRESSURERELEASED)1
RETURN 2
PRESSURE- APL NOSE DN
PRESSURE- APL NOSE UP
BRAKE PRESSURE SW
FWD
UP
APL NOSE UP
APL NOSE UP
APL NOSE DN
APL NOSE DN
1
2
3
RETURN 1
2
3
PRESSURE - APL NOSE UP
PRESSURE - APL NOSE DOWN
62741AFA
g62741af B767 − Electrical / Instrument Book 11 − Page 35
STABILIZER TRIM CONTROL MODULE FUNCTION - NOCONTROL INPUT

Electric Input: Nose Down Trim
An electric command for airplane nose trim from the alternateelectric trim switches on the control stand, or from the SAMs, causesthe nose down arm and control solenoid valves to open. The left endof each valve is depressurized and the valve is pressure biased tomove to the left. Flow from the rate control valve is sent to releasethe secondary brake and drive the hydraulic motor in the airplanenose down trim direction. The brake pressure switches sense thepressure to the secondary brakes and provide a signal to both SAMs.
With the secondary brakes released, the rotation of the hydraulicmotors is summed through a differential gearbox. The output of thegearbox drives a bull gear and the ballscrew. A primary brakeprevents airloads from back driving the ballscrew.
27.41 − HORIZONTAL STABILIZER − STCM HYDRAULIC OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 36
M0008857.PST
STABILIZER TRIM CONTROL MODULE FUNCTION- NOSE DOWN INPUT

STA 1805
UP
FWD
SWPRESSURE BRAKE
APL NOSE UPPRESSURE-
APL NOSE DNPRESSURE-
RETURN 2
1 RELEASED)(PRESSURE
BRAKE
PRESSURE RETURN 1
INTERNALS SAME AS M212
M211
(RATCHED)PRIMARY BRAKE
RELEASEBRAKEPRESSURE-
DN SOLAPL NOSE
"CONTROL"
VALVERATE CONTROL
"ARM" VALVE
"CONTROL" VALVE BYPASSBRAKE
MANUAL
UP SOLAPL NOSE
"CONTROL"
PRESSURE RETURN 1 ELEV FEELDN SOL
APL NOSE "ARM"
UP SOLAPL NOSE
"ARM"
VALVEOPERATED
MOTOR
M212 R STAB TRIM CONT
SYSTEM PRESSURE
RETURN
METERED PRESSURE
RETURN 2 BRAKE RELPRESSURE
MOTORHYD
GEARBOX
FEELELEV
STABILIZER
239WL
MOTORHYD
ACTUATOR ASSYBALLSCREW
27-30-01CMPTR-CTRELEV FEEL
27-00-01HYD DISTR-CTR
FLIGHT CONTROLS
27-00-01HYD DISTR-L
FLIGHT CONTROLS
27-30-01FEEL CMPTR-L
ELEVATOR
BACK-DRIVEPREVENTS CCW
BRAKE DISC
BACK-DRIVEPREVENTS CW
L STAB TRIM CONTSECONDARY
RELEASED)(PRESSURE
BRAKESECONDARY
1
2
3
2
3
PRESSURE - APL NOSE UP
PRESSURE - APL NOSE DOWN
62741AGA
NOSE DOWN
NOSE DOWN
NOSE UP
NOSE UP
g62741ag B767 − Electrical / Instrument Book 11 − Page 37
STABILIZER TRIM CONTROL MODULE FUNCTION- NOSEDOWN INPUT

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age38
INT
EN
TIO
NA
LLYB
LAN
K

STABILIZER TRIM OPERATION
g62741ag B767 − Electrical / Instrument Book 11 − Page 39

Stabilizer Operation
Two hydraulically released brakes and two hydraulic motors drivethe ballscrew actuator. When the ballscrew actuator turns, thehorizontal stabilizer moves.
Hydraulic Control
The left hydraulic system powers the left stabilizer trim controlmodule ( STCM ) while the centre system powers the right STCM .Electrical commands to the STCM’s cause valves to port hydraulicpower to the brakes and motors of the ballscrew actuator.
Cutout switches, on the control stand (P10), power a shutoff valve oneach STCM .
A rate control valve on each STCM, controlled by the outputpressure of the elevator feel computer, regulates hydraulic flow to themotors driving the ballscrew actuator.
Dual coil CONTROL and ARM solenoid valves on each STCM(alternate electric trim), or single coil (standby manual), control thehydraulic power to the brakes and motors of the ballscrew actuator.
Alternate Electric Trim Control (OGE and On)
Two alternate electric trim switches, on the control stand (P10),directly power the alternate coil of the CONTROL and ARMsolenoid valves of both STCM’s.
Standby Manual Trim Control (Up To OGE)
Two manual trim levers and cable systems are used to input directlyto the manual standby ARM and CONTROL valves of the STCM’s.
Electric Trim Control
Besides the Alternate Electric Trim which bypasses the SAM, thereare three other electric modes of trim operation which operatethrough the SAM.
• Manual Electric Trim
• Auto Trim
• Mach Trim
Common circuits connect SAM to the STCM.
Manual Electric Trim
Two manual electric trim switches, on each pilot control wheel,provide electric commands to both SAM ’s. Each SAM sends trimCONTROL and ARM signals to its STCM. The right SAM controlsthe right STCM and the left SAM controls the left STCM.
The trim CONTROL signals are sent directly to the CONTROLsolenoid valves of the STCM’s. The trim ARM signals pass through:
• Elevator column cutoff switches.• Trim limit select relays operated by the left and right flap/stab
position modules ( FSPM’s).
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 40
M0008560.PST
STABILIZER TRIM OPERATION

TRIMMACH
MACHTRIM
AUTOTRIM
FLAP/STAB POSITION MODULEFSPM:
AILERON LOCKOUT MODULE
STABILIZER TRIM CONTROL MODULEFLIGHT CONTROL COMPUTER
STABILIZER TRIM ANDAIR DATA COMPUTERADC :
STCM:FCC :
SAM :
TRIM CONTROL SIGNAL
FSPM L
FSPM R
C
R
L
MODULESTRANSMITTERAND POSITIONLIMIT SWITCH
CONTROL
ARM
HYDRAULIC CUTOUT SWITCHES
ALTERNATE ELECTRIC TRIM COMMANDS
P5 PANEL
STABTRIM
STAB TRIMUNSCHED
EICAS COMPUTER (2)
STCM L
DATA BUS
HYDRAULIC
ELECTRICAL
MECHANICAL
SAM L
MANUALELECTRICTRIM
AUTOTRIM
ADC L
FCC L AUTO TRIM COMMANDS
CONTROL
ARM
MANUALELECTRICTRIM
SAM R
AUTO TRIM COMMANDS
CONTROL
ARM
FCC R
ADC R
MANUALELECTRICTRIMCOMMANDS
TRIM CONTROL SIGNAL
TRIM ARM
SIGNAL
TRIM ARM
SIGNAL
LIMITSWITCHES
POSITIONXMTRS
TRIM LIMIT
SELECT RELAY
CUTOFF
SWITCHES
CUTOFFSWITCHES
TRIM LIMITSELECT RELAY
LIMITSWITCHES
POSITIONXMTRS
LIMITSWITCHES
POSITIONXMTRS
SHUT-OFF
VALVE
RATECONTROL
VALVE
CONTROLSOL
VALVES
ARMSOL
VALVES
STCM R
HYDRPOWER
SHUT-OFFVALVE
RATECONTROL
VALVE
CONTROLSOL
VALVESARMSOL
VALVES
POWERHYDR
FCC C
ELEVATORFEEL
COMPUTER
HYDRMOTORANDBRAKE
HYDRMOTOR
ANDBRAKE
BALLSCREWACTUATORASSEMBLY
STABILIZER
C SYS
L SYS
FSPM C
ELEVATORCOLUMN
ELEVATORCOLUMN
POSITIONINDICATOR(TYP)
1
6
5
5
7
8
8
6 3
7 3
5
6 4
2
1
2
1
4
G62741BO
R
L
PTU
CABLES
TO SAMsARM
g62741bo B767 − Electrical / Instrument Book 11 − Page 41STABILIZER TRIM OPERATION

Manual Electric Trim (Continued)
• Limit switches located in the left and right limit switch andposition transmitter modules.
Auto Trim
The three FCC’s supply autopilot commands to both SAM ’s to trimthe stabilizer, based on elevator out-of-neutral position. Whenselected, the left FCC commands the left SAM and the right FCC theright SAM; the centre FCC commands either SAM, whichever isinitialized first. In the auto trim mode, normally only one SAMcontrols its dedicated STCM, whether or not more than one FCC isengaged.
The auto trim circuit of the SAM in command, outputs trimCONTROL and ARM signals to the solenoid valves of the STCM(as described under manual electric trim).
Mach Trim
Both SAM’s receive mach data from both ADC’s. When both SAM’sreceive no other trim command, the mach trim circuit on the SAMfirst initialized, controls the stabilizer to change pitch when machnumber changes. The SAM sends trim CONTROL and ARM signalsto the STCM solenoid valves (as described under manual electrictrim).
Limit Switch and Position Transmitter Modules
Three limit switch and position transmitter modules are mechanicallydriven by the movement of the stabilizer. They contain positiontransmitters which provide feedback signals to the SAM’s and theFCC’s. These signals go through three flap/stab position modules (FSPM).
Position transmitters provide signals to stabilizer position indicatorson the control stand.
Limit switches control stabilizer movement during operation in theSAM modes.
Stabilizer Fault Indication
Both SAM’s monitor stabilizer operation. Faults are indicated onEICAS and by a STAB TRIM or an UNSCHED STAB TRIM lighton the pilot’s overhead panel.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 42
M0008560.PST
STABILIZER TRIM OPERATION(Continued)

TRIMMACH
MACHTRIM
AUTOTRIM
FLAP/STAB POSITION MODULEFSPM:
AILERON LOCKOUT MODULE
STABILIZER TRIM CONTROL MODULEFLIGHT CONTROL COMPUTER
STABILIZER TRIM ANDAIR DATA COMPUTERADC :
STCM:FCC :
SAM :
TRIM CONTROL SIGNAL
FSPM L
FSPM R
C
R
L
MODULESTRANSMITTERAND POSITIONLIMIT SWITCH
CONTROL
ARM
HYDRAULIC CUTOUT SWITCHES
ALTERNATE ELECTRIC TRIM COMMANDS
P5 PANEL
STABTRIM
STAB TRIMUNSCHED
EICAS COMPUTER (2)
STCM L
DATA BUS
HYDRAULIC
ELECTRICAL
MECHANICAL
SAM L
MANUALELECTRICTRIM
AUTOTRIM
ADC L
FCC L AUTO TRIM COMMANDS
CONTROL
ARM
MANUALELECTRICTRIM
SAM R
AUTO TRIM COMMANDS
CONTROL
ARM
FCC R
ADC R
MANUALELECTRICTRIMCOMMANDS
TRIM CONTROL SIGNAL
TRIM ARM
SIGNAL
TRIM ARM
SIGNAL
LIMITSWITCHES
POSITIONXMTRS
TRIM LIMIT
SELECT RELAY
CUTOFF
SWITCHES
CUTOFFSWITCHES
TRIM LIMITSELECT RELAY
LIMITSWITCHES
POSITIONXMTRS
LIMITSWITCHES
POSITIONXMTRS
SHUT-OFF
VALVE
RATECONTROL
VALVE
CONTROLSOL
VALVES
ARMSOL
VALVES
STCM R
HYDRPOWER
SHUT-OFFVALVE
RATECONTROL
VALVE
CONTROLSOL
VALVESARMSOL
VALVES
POWERHYDR
FCC C
ELEVATORFEEL
COMPUTER
HYDRMOTORANDBRAKE
HYDRMOTOR
ANDBRAKE
BALLSCREWACTUATORASSEMBLY
STABILIZER
C SYS
L SYS
FSPM C
ELEVATORCOLUMN
ELEVATORCOLUMN
POSITIONINDICATOR(TYP)
1
6
5
5
7
8
8
6 3
7 3
5
6 4
2
1
2
1
4
G62741BO
R
L
PTU
CABLES
TO SAMsARM
g62741bo B767 − Electrical / Instrument Book 11 − Page 43STABILIZER TRIM OPERATION
(Continued)

General Description
Each SAM controls its dedicated STCM with electrical CONTROLand ARM signals which energize the solenoid valves of the STCM.
The CONTROL signal is sent directly to the CONTROL solenoidvalves, while the ARM signals pass through the elevator columncutoff switches, the trim limit select relays and the limit switches inthe left and right limit switch and position transmitter modules beforereaching the ARM solenoids.
NOTE: From OGM and on, there are parallel back up controlcolumn cutoff switches.
NOTE: If the stabilizer moves without command or contrary tocommand, then moving the elevator control column in theopposite direction will stop the stabilizer movement byoperation of control column cutout switches.
Airplane Nose Up Signal
Moving the control column 2.2° to 2.7° forward of the neutralposition interrupts an airplane nose up ARM signal.
A limit switch in the limit switch and position transmitter moduleinterrupts an airplane nose up ARM signal when the stabilizerreaches the 12.8 unit position. This is the stabilizer leading edgedown electrical limit.
Airplane Nose Down Signal
Moving the control column 2.0° to 2.5° aft of the neutral positioninterrupts an airplane nose down ARM signal.
The stabilizer leading edge up electrical limit changes according toflaps retracted or extended.
The stabilizer mechanical stops are at 0 units and 14.2 units, withneutral at 2 units.
Flaps Retracted
If the flaps are retracted, the FSPM monitoring the flap positionkeeps the trim select relay de-energized. A limit switch in the limitswitch and position transmitter module interrupts an airplane nosedown ARM signal when the stabilizer reaches the 1.5 units position.
Flaps Extended
If the flaps are extended, the FSPM causes the trim select relay toenergize. A limit switch then interrupts the ARM signal when thestabilizer reaches the 0.25 unit position.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 44
M000860E.PST
SAM TRIM OUTPUTS —300 AIRCRAFT

COLUMN
CAPTAIN’S COLUMNCONTROLF/O
ELEVATOR
COLUMN SWITCHES
COLUMN AFT>2.0 TO 2.5
ASSEMBLYBALLSCREWSTABILIZER
CENTER SECTIONSTABILIZER
MAIN EQUIPMENT CENTER
SAM (L)E1-1
SAM (R)E2-1
LIMIT SWITCH &POSITION XMTRMODULE (LSPTM)
STAB LE
STAB LE>12.8 UNITS(-11.0)
STAB LE<1.5 UNITS(+0.5)
FWD
"ARM"
"ARM"
"CONTROL"
"CONTROL"NOSE DNAIRPLANE
NOSE UPAIRPLANE
NOSE DNAIRPLANE
NOSE UPAIRPLANE
SOLENOID
SOLENOID
SOLENOID
SOLENOID
SWITCHALT ARM
SWITCHALT ARM
SWITCHCONTROLALT
SWITCHCONTROLALT
AIRPLANE NOSE DOWN
AIRPLANE NOSE UPCONTROL
AIRPLANENOSE UP CMD
DOWN CMDAIRPLANE NOSE
ARM
FSPM
RELAYTRIM LIMIT SEL
FWD
FWD
62741AAA
.
< 0.25 UNITS
DUAL SWITCHES > OGM
CONTROL
TORQUETUBE
STABILERTRIM CONTROLMODULE (2)
LIMIT SWITCHAND POSITIONTRANSMITTERMODULE (3)
COLUMN FWD> 2.2 TO 2.7
STAB TRIMCONTROL MODULE(STCM) L OR R
STABILIZER TRIM AND AILERONLOCKOUT MODULE (SAM) L OR R
2.2 TO 2.7
2.2 TO 2.7
2.0 TO 2.5
2.0 TO 2.5
LEFT COL FWD
LEFT COL FWD
LEFT COL AFT
LEFT COL AFTCONT STABTRIM CB
FLAPS NOTRETRACTED
FLAPS NOTRETRACTED
g62741aa B767 − Electrical / Instrument Book 11 − Page 45SAM TRIM OUTPUTS —300 AIRCRAFT

General Description
Each SAM controls its dedicated STCM with electrical CONTROLand ARM signals which energize the solenoid valves of the STCM.
The CONTROL signal is sent directly to the CONTROL solenoidvalves while the ARM signals pass through the elevator columncutoff switches, the trim limit select relays and the limit switches inthe left and right limit switch and position transmitter modules beforereaching the ARM solenoids.
Airplane Nose Up Signal
The following subparagraphs relate to the airplane nose up armingcontrol circuit.
Elevator control column cutout switches are installed to enable thepilot to stop a runaway stabilizer by pushing the control column inthe opposite direction to Aircraft nose up or down trim.
Column Cutout
Moving the control column 2.2° to 2.7° forward of the neutralposition interrupts an airplane nose up ARM signal.
Limit Switches
A limit switch in the limit switch and position transmitter moduleinterrupts an airplane nose up ARM signal when the stabilizerreaches the 11.8 unit position. This is the stabilizer leading edgedown electrical limit.
Airplane Nose Down Signal
The following subparagraphs relate to the aircraft nose down armingcontrol circuit.
Column Cutout
Moving the control column 2.0° to 2.5° aft of the neutral positioninterrupts an airplane nose down ARM signal.
Neutral Shift Switch
When the stabilizer position is between 8.5 and 14.2 units(mechanical limit) or 8.5 and 11.8 units (electrical limit), the neutralposition of the elevator is shifted by the neutral shift mechanism. Theelevator is moved up to a maximum of 5.7° (at the mechanical limit)and this in turn backdrives the control column aft of the normalneutral position to a new neutral.
At stabilizer position 8.5 a neutral shift switch in the Limit Switchand Position XMTR Module changes the ARM nose down commandsignal path from the 2.0° to 2.5° column cutout switches to a set of3.0° to 3.5° column cutout switches.
Moving the control column 3.0° to 3.5° aft of the normal neutralposition interrupts an airplane nose down ARM signal.
Electrical Limit Switches
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 46
M0008371.PST
SAM TRIM OUTPUTS –200 AIRCRAFT

FSPM
G62741BG
ARM
CONTROL
FLAPS NOTRETRACTED
FLAPS NOTRETRACTED
AIRPLANE NOSE UP
AIRPLANE NOSE DOWN
AIRPLANENOSE UPCOMMAND
AIRPLANE NOSEDOWNCOMMAND
TRIM LIMIT SELRELAY
CONT STABTRIM CB
STAB LE> 11.8 UNITS
STAB LE> 8.5 UNITS
STAB LE< 1.5 UNITS
STAB LE< 0.5 UNITS
LIMIT SWITCH ANDPOSITION XMTRMODULE (LSPTM)
AIRPLANE NOSE UPARM SOLENOID
AIRPLANE NOSE DOWNARM SOLENOID
AIRPLANE NOSE UPCONT SOLENOID
AIRPLANE NOSE DOWNCONT SOLENOID
L STCM
L SAM
LEFT COLUMN FWD
LEFT COLUMN AFT
COLUMN AFT
COL FWD2.2 TO 2.7
COL AFT2.0 TO 2.5
COL AFT3.0 TO 3.5
g62741bg B767 − Electrical / Instrument Book 11 − Page 47SAM TRIM OUTPUTS –200 AIRCRAFT

Electrical Limit Switches (Continued)• If the flaps are retracted: The FSPM monitoring the flap position
keeps the trim select relay de-energized. A limit switch in thelimit switch and position transmitter module interrupts an airplanenose down ARM signal when the stabilizer reaches the 1.5 unitposition.
• If the flaps are extended: The FSPM causes the trim select relayto energize. A limit switch then interrupts the ARM signal whenthe stabilizer reaches the 0.5 unit position.
Control Circuit
Both nose up and nose down CONTROL signals go directly to theCONTROL solenoids in their respective STCM’s, and are notinhibited by any limit switches.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 48
M0008371.PST
SAM TRIM OUTPUTS –200 AIRCRAFT(Continued)

FSPM
G62741BG
ARM
CONTROL
FLAPS NOTRETRACTED
FLAPS NOTRETRACTED
AIRPLANE NOSE UP
AIRPLANE NOSE DOWN
AIRPLANENOSE UPCOMMAND
AIRPLANE NOSEDOWNCOMMAND
TRIM LIMIT SELRELAY
CONT STABTRIM CB
STAB LE> 11.8 UNITS
STAB LE> 8.5 UNITS
STAB LE< 1.5 UNITS
STAB LE< 0.5 UNITS
LIMIT SWITCH ANDPOSITION XMTRMODULE (LSPTM)
AIRPLANE NOSE UPARM SOLENOID
AIRPLANE NOSE DOWNARM SOLENOID
AIRPLANE NOSE UPCONT SOLENOID
AIRPLANE NOSE DOWNCONT SOLENOID
L STCM
L SAM
LEFT COLUMN FWD
LEFT COLUMN AFT
COLUMN AFT
COL FWD2.2 TO 2.7
COL AFT2.0 TO 2.5
COL AFT3.0 TO 3.5
g62741bg B767 − Electrical / Instrument Book 11 − Page 49SAM TRIM OUTPUTS –200 AIRCRAFT
(Continued)

General
Up to aircraft OGE, the electrical modes of operation are: ManualElectric trim, Auto Pilot trim and Mach trim. A cable operatedStandby Manual trim which bypasses the SAM is used when SAMfaults exist. From OGE and on, instead of a cable Standby Manualtrim system there is an Alternate Electric system which bypasses theSAM. The other electric modes remain the same. The order ofpriority for which mode trims the stabilizer is established byautopilot single or multichannel engagement.
Single Channel
With the autopilot engaged in single channel (CMD or CWS) theorder of control priority is as follows:
• Standby Manual trim or Alternate Electric trim (P10).• Manual Electric trim.• Automatic stabilizer trim.
Operation of manual electric trim disengages the autopilot. Operationof Standby Manual trim or Alternate Electric trim (P10), does notdisengage the autopilot.
During single channel autopilot operation, automatic trim is at halfrate.
If an opposite Alternate Electric trim command is applied(P10),during Autopilot single channel operation, it will cause acancelling of trim on the STCM under autopilot command and theother STCM will operate (at half rate) under the command of theAlternate Electric switches.
If an opposite Standby Manual trim (P10 cable),is applied duringAutopilot single channel operation, it will mechanically move thestandby manual valves in the STCMs to give full rate oppositecommand.
Multichannel
When the autopilot is engaged in multichannel (two or moreautopilots engaged in command), the order of priority is altered asfollows:
• Standby Manual trim or Alternate Electric trim (P10).• Automatic stabilizer trim.
During autopilot multichannel operation, Manual Electric trim isinhibited.
During mutichannel autopilot operation, automatic trim is normally athalf rate, however, under certain circumstances automatic trim can beat full rate.
Operation of Standby Manual trim or Alternate Electric trim (P10),does not disengage the autopilot.
If an opposite Alternate Electric trim command is applied during thefull rate trim situation, it will cause the signals to cancel in bothSTCMs and the stabilizer will not move.
If an opposite Standby Manual trim is applied during Autopilotmultichannel operation, it will mechanically move the standbymanual valves in the STCMs to give full rate opposite command.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 50
M0008631.PST
HORIZONTAL STABILIZER TRIM - FUNCTIONAL MODE PRIORITY

62741BWA
SINGLE CHANNEL AUTOPILOT ENGAGED MULTICHANNEL AUTOPILOT ENGAGED
ALTERNATE ELECTRIC TRIM ORSTANDBY MANUAL TRIM ORMANUAL ELECTRIC TRIM
AUTOSTABILIZER
(OPERATION OF MANUAL ELECTRIC TRIMDISENGAGES AUTOPILOT)
AUTOSTABILIZER
ALTERNATE ELECTRIC TRIMORSTANDBY MANUAL TRIM
(MANUAL ELECTRIC TRIM ISINHIBITED IN MULTICHANNEL ENGAGED)
MACH TRIM
AUTOPILOT DISENGAGED
ALTERNATE ELECTRIC TRIMORSTANDBY MANUAL TRIMORMANUAL ELECTRIC TRIM
1.
1. 1.
2.
2.2.
g62741bw B767 − Electrical / Instrument Book 11 − Page 51
HORIZONTAL STABILIZER TRIM - FUNCTIONAL MODEPRIORITY

Mach Trim
Mach trim is enabled with the Autopilot not engaged in CMD andAlternate Electric trim or Standby Manual trim or Manual Electrictrim is not being applied. This occurs automatically and modeselection is not required.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 52
M0008631.PST
HORIZONTAL STABILIZER TRIM - FUNCTIONAL MODE PRIORITY(Continued)

62741BWA
SINGLE CHANNEL AUTOPILOT ENGAGED MULTICHANNEL AUTOPILOT ENGAGED
ALTERNATE ELECTRIC TRIM ORSTANDBY MANUAL TRIM ORMANUAL ELECTRIC TRIM
AUTOSTABILIZER
(OPERATION OF MANUAL ELECTRIC TRIMDISENGAGES AUTOPILOT)
AUTOSTABILIZER
ALTERNATE ELECTRIC TRIMORSTANDBY MANUAL TRIM
(MANUAL ELECTRIC TRIM ISINHIBITED IN MULTICHANNEL ENGAGED)
MACH TRIM
AUTOPILOT DISENGAGED
ALTERNATE ELECTRIC TRIMORSTANDBY MANUAL TRIMORMANUAL ELECTRIC TRIM
1.
1. 1.
2.
2.2.
g62741bw B767 − Electrical / Instrument Book 11 − Page 53
HORIZONTAL STABILIZER TRIM - FUNCTIONAL MODEPRIORITY
(Continued)

General Description
The manual electric trim switches input commands to both SAM’swhich control the solenoid valves of the STCM’s.
Manual Electric Trim Switches
A set of dual switches, located in each pilots wheels, controlsstabilizer trim in the manual electric mode. Each switch set providesmanual electric ARM and CONTROL trim signals to both STCM’sthrough both SAM’s. The switches can be moved up or down andare spring loaded to the OFF neutral position.
Operation
When the switches on either wheel are moved together in an up ordown direction, 28v dc power is directed through each SAM to theappropriate solenoids on each STCM. The auto-manual transferrelays in each SAM are released during manual trim.
Single FCC engaged
When one FCC is engaged, the relays in both SAM’s are energizedallowing the auto trim commands of the SAM in control to powerthe solenoid valves of its dedicated STCM.
If a manual electric trim command is made, coincidence monitors inthe SAM’s, inhibit the auto trim mode, disengage the FCC, andde-energize both auto-manual relays. Now the manual electric trimcommand takes priority over auto trim.
Multi FCCs Engaged
When there is multi channel FCC engagement, the auto transferrelays in both SAM’s are energized allowing auto trim commandsfrom the SAM in control to power the solenoid valves of itsdedicated STCM.
If a manual electric trim command is then made, the coincidencemonitor signals inhibiting the auto trim mode are ignored by theFCC’s. The relays remain energized disabling the control of themanual electric trim switches.
Maintenance Practices
Failure of a SAM or loss of power supply to the SAM causes theauto-manual transfer relays to de-energize allowing the manualelectric trim switches to command the stabilizer.
The loss of the left stab trim control power, 28 volt dc (C/B 11H11),causes the complete loss of manual electric trim.
A disagreement between the manual electric trim switches causes thecoincidence monitors to inhibit manual electric trim commands andto set the COL TRIM SW fault ball on both SAM’s. Themaintenance message STAB TRIM then appears on EICAS. Thefaultballs and the STAB TRIM maintenance message resetautomatically when a valid manual electric trim command is made.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 54
M00141E0.PST
MANUAL ELECTRIC TRIM MODE

RIGHT SAMS81 FIRST OFFICER’SCONTROL WHEEL TRIM SWS
28V DCL BUS
L STABTRIM CONTROL(H11)
P11-2 S80 CAPTAIN’S CONTROLWHEEL MANUAL TRIM SWS LEFT
FCC
RIGHTFCC
28V DC
TRIM CONTROLR STAB
(H20)
P11-5TRIM COMMAND
ENGAGE
VALIDARM
ARMVALIDENGAGE
TRIM COMMAND
POWER SUPPLY
TUA = TRIM UP ARMTDA = TRIM DN ARMTUC = TRIM UP CONTROLTDC = TRIM DN CONTROL
TDATUA
TDCTUC
R BUS
TRIM CONTROLCOMMAND
TRIM ARMCOMMAND
INTERNALSSAME ASLEFT SAM
LEFT SAM
TDA
TUATDCTUC
TRIMCOMMANDAUTO TRIM COMMAND
SAM FAULTMONITOR
MANUALTRIM INPUTCOINCEDENCEMONITOR
MANUAL ELECTRICTRIM COMMANDS
AUTOTRIMMODECONTROL
FROMRT SAM L STCM
SOLENOIDVALVES
SOLENOIDVALVES
R STCMTRIMCOMMAND
TDATUA
TDCTUC
COL TRIM SWFAULT BALL
CENTERFCC
ARMVALID
ENGAGE
TRIM COMMAND
POWER SUPPLY
AUTO TRIMVALID INHIBIT
1 AUTO/MANUALTRANSFER RELAY
1
1
62741BXA
g62741bx B767 − Electrical / Instrument Book 11 − Page 55MANUAL ELECTRIC TRIM MODE

Auto Trim - General Description
Auto trim control of the stabilizer occurs when one or more FCC isengaged.
The left FCC commands the left SAM and the right FCC commandsthe right SAM. The centre FCC commands either the left or the rightSAM attempting to engage the left SAM first.
Operation
A selected FCC sends an ARM signal to its corresponding SAM.When it receives a VALID signal from the SAM , the FCC engages.The engaged FCC provides a trim command to the SAM when theelevator is deflected out of its neutral position.
FCC Logic
The following is the logic used during cruise and during anapproach.
In Cruise
Autostabilizer trim keeps the elevator within the neutral position ofthe elevator feel force unit. This is done to prevent pitch servoout-of-detent, and to prevent large pitch transients if the autopilot isdisconnected with the feel unit displaced from the neutral position.
During an Approach
During an approach, stab trim bias is applied. The stabilizer ispositioned leading edge down, causing the elevator to move in theopposite direction to maintain desired path. Trim bias leaves theairplane trimmed nose up in the event of total autopilot disconnect.
Single Channel FCC
During single channel operation, one FCC is engaged and commandsits corresponding SAM. The auto-manual transfer relays areenergized in both SAM’s. The FCC provides an auto trim commandwhen the elevator is deflected for more 4 seconds. The stabilizer thenmoves at half rate speed to new trim position.(0.25°/sec)
Multiple Channel FCC
During multiple channel operation, two or three FCC’s are engaged.The FCC (first engaged) provides trim commands to its SAM,immediately, when the elevator is deflected out of its neutralposition. The stabilizer moves at half rate speed.
If a failure occurs on the 767-300 that results in autoland 3 (threeFCC’s engaged) defaulting to autoland 2 (two FCC’s engaged), theFCC not controlling trim engages the SAM not previouslyperforming the auto trim function. The two FCC’s command the twoSAM’s to trim simultaneously resulting in the stabilizer moving atfull rate (0.5°/sec). This full speed trim permits quick retrimming ofthe airplane for go-around during a missed approach.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 56
M0008658.PST
AUTO TRIM MODE

RIGHT SAMS81 FIRST OFFICER’SCONTROL WHEEL TRIM SWS
28V DCL BUS
L STABTRIM CONTROL(H11)
P11-2 S80 CAPTAIN’S CONTROLWHEEL MANUAL TRIM SWS LEFT
FCC
RIGHTFCC
28V DC
TRIM CONTROLR STAB
(H20)
P11-5TRIM COMMAND
ENGAGE
VALIDARM
ARMVALIDENGAGE
TRIM COMMAND
POWER SUPPLY
TUA = TRIM UP ARMTDA = TRIM DN ARMTUC = TRIM UP CONTROLTDC = TRIM DN CONTROL
TDATUA
TDCTUC
R BUS
TRIM CONTROLCOMMAND
TRIM ARMCOMMAND
INTERNALSSAME ASLEFT SAM
LEFT SAM
TDA
TUATDCTUC
TRIMCOMMANDAUTO TRIM COMMAND
SAM FAULTMONITOR
MANUALTRIM INPUTCOINCEDENCEMONITOR
MANUAL ELECTRICTRIM COMMANDS
AUTOTRIMMODECONTROL
FROMRT SAM L STCM
SOLENOIDVALVES
SOLENOIDVALVES
R STCMTRIMCOMMAND
TDATUA
TDCTUC
COL TRIM SWFAULT BALL
CENTERFCC
ARMVALID
ENGAGE
TRIM COMMAND
POWER SUPPLY
AUTO TRIMVALID INHIBIT
1 AUTO/MANUALTRANSFER RELAY
1
1
62741BXA
g62741bx B767 − Electrical / Instrument Book 11 − Page 57AUTO TRIM MODE

General Description
The mach trim mode controls the stabilizer trim during flight whenno autopilot is selected (no FCC engaged) and no other stabilizertrim command exists. The controlling SAM commands the stabilizertrim as a function of change in mach number to enhance thelongitudinal stability of the airplane. A speed increase results in anairplane nose up trim while a speed decrease results in an airplanenose down trim.
NOTE: When not engaged, the mach trim control law is referencedto stabilizer position. After engagement, the control lawcommands the stabilizer trim system to reposition thestabilizer in response to variations in Mc (computed mach).
Operation
Both SAM’s contain the mach trim circuits and receive mach datafrom the two ADC’s.
After initialization the controlling SAM automatically engages themach trim mode and commands the stabilizer to move at half rate ofspeed when:
• The airplane is in the air (20 sec delay).• No manual electric trim switches input is being made.• No alternate electric trim switches input is being made.• No FCC is engaged (no autotrim)• Flaps and slats are retracted.• The airplane speed changes.• No SAM fault is present.
The mach trim schedule provides for a greater stabilizer trimcorrection as the mach number increases.
Movement of the elevator control column in an opposite direction tothe airplane longitudinal trim causes the elevator control columncutoff switches to stop the mach trim mode.
Maintenance Practices
A failure of the controlling SAM to perform in mach trim moderesults in the other SAM taking over control. Depending upon thecause of the failure, faultballs are set on the failed SAM. Failure ofboth SAM ’s to perform the mach trim function is not annunciated.
Mc (mach) data which is identified as failed by the ARINC 429status matrix is discarded and the previous valid value is used. Iffour or more invalid values of a parameter are received within eightsuccessive samples, the failure is set as an ADC fault.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM OPERATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 58
M00086A8.PST
MACH TRIM MODE

Mc
SAM F/B NOT SETMACH TRIM SELECT
NO ALTERNATE ELEC TRIM
NO MANUAL ELEC TRIMNO AUTO TRIM
IN AIR FLAPS RETRACTEDAND
STCM
LIMITSW’S
MACH TRIM CONTROL
STAB
CMDTUA
TDC
TDA
TUC
STAB
POS
CHANGE IN STABILIZER
POSITION
SAM
MACH TRIM ENGAGE
ENGAGE INHIBIT
UP CONTROLSOLENOID
SOLENOIDDN CONTROL
UP ARMSOLENOID
DN ARMSOLENOID
STCM
STABILIZER TRIM/AILERON LOCKOUT MODULE (EITHER)
COMPUTED MACH, Mc
SAM FAULTMONITOR
STAB TRIM
FAULT
SAM VALID
FAULT SAMFAULTBALL
62741BZA
DADC
FSPM
MACH TRIM SCHEDULE
0.3 0.4 0.5 0.6 0.7 0.8 0.9
.33M.78M
.88M.8
.5
.4
CHANGEIN
STABPOS
.0
(FSPM)
g62741bz B767 − Electrical / Instrument Book 11 − Page 59MACH TRIM MODE

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age60
INT
EN
TIO
NA
LLYB
LAN
K

ALTERNATE ELECTRIC MODE - VH-OGE AND ON
g62741bz B767 − Electrical / Instrument Book 11 − Page 61

General Description
The alternate electric trim system provides direct electrical control tothe solenoid valves on the STCM ’s. When trimming with thealternate system, the SAM ’s, column cutoff switches and limitswitches are bypassed.
Alternate Electric Trim Switches
Two alternate electric trim switches, located on the top left side ofthe control stand, P10, control stabilizer trim in the alternate electricmode. The switches will move forward or aft and are spring returnedto the neutral position when released.
Operation
Moving both the right ARM, and the left CONTROL switchesforward, provides an electrical signal for airplane nose down trim to’both’ STCM’s. Moving both switches aft provides a signal forairplane nose up trim to ’both’ STCM ’s providing full rate trim.
A normally-open microswitch closes with any ARM switchmovement. This signal is sent to both SAM ’s to prevent theUNSCHED TRIM message. If auto trim or mach trim is engaged andan unscheduled trim occurs, the UNSCHED TRIM message willappear and remain on during alternate electric trim operation.
NOTE: Single channel autopilot engaged mode is not disengagedby operation of the alternate electric trim switches. Singlechannel Autopilot trim is at half rate through one STCM.In the event of conflicting commands from these twosources, the stabilizer will move at half rate in thedirection commanded by the alternate electric trimswitches (This is because the alternate electric trim is to’both’ STCMs). Multi channel engaged mode operates thesame with only one trim channel active (one STCM).Under certain conditions in multichannel engaged mode,the two trim channels are used. In this case full-rateautotrim (both STCMs) is used. An alternate electric trimcounter command at this time will result in no trim.
Maintenance Practices
Access to the alternate electric trim switches is by removing thecover plate on the top left side of the control stand. The switches areinstalled as one assembly.
If the microswitch connected to the ARM switch is closed for morethan 30 seconds when either the left or centre hydraulic system ispressurized, the MAN LEVER SW fault ball is set on both SAM ’s.The faultballs reset automatically 2 seconds after the SAM’s sensethe microswitch open.
27.41 − HORIZONTAL STABILIZER − ALTERNATE ELECTRIC MODE - VH-OGEAND ON
B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 62
M00083CA.PST
ALTERNATE ELECTRIC TRIM SWITCHES AND SOLENOIDS

ALT TRIM DOWN "CONTROL" (TDC)
ALT TRIM UP "CONTROL" (TUC)
ALT TRIM DOWN "ARM" (TDA)
ALT TRIM UP "ARM" (TUA)
L SAM
R SAM
S790 ALT STAB TRIM SWITCH
CONTROLNOSE DOWN
NOSE UP
NOSE DOWN
NOSE UPARM
INDICATION NOSE DOWN
NOSE UP
P11 CB PANEL
28V DCBAT. BUS
STAB TRIM ALT
L STCM
R STCM
AS ABOVE (TUC)AS ABOVE (TDC)
AS ABOVE (TDA)
FROM R SAM
28V DC
28V DC
SAME ASR STCM
INTERNALS
(TUA SOLENOID)SOLENOID VALVEDUAL COIL
UP SOLENOIDCONTROL NOSE
DOWN SOLENOIDCONTROL NOSE
ARM NOSEUP SOLENOID
DOWN SOLENOIDARM NOSE
"CONTROL"SWITCH
SWITCH"ARM"
UPNOSE
DOWNNOSE
A36
62741ACA
g62741ac B767 − Electrical / Instrument Book 11 − Page 63ALTERNATE ELECTRIC TRIM SWITCHES AND SOLENOIDS

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age64
INT
EN
TIO
NA
LLYB
LAN
K

STANDBY MANUAL MODE - VH-EAJ TO OGD
g62741ac B767 − Electrical / Instrument Book 11 − Page 65

Trim Levers
Standby manual trim is accomplished by the use of trim levers asfollows:
Operation
Moving both the ARM (right), and CONTROL (left), stby manualtrim levers (P10),forward, provides a mechanical airplane nose downsignal to both of the hydraulic stabilizer trim control modules (STCM’s). Both levers moved aft provides an airplane nose up trimsignal. When released, both levers should return to neutral uprightposition using spring centering from the STCM’s valves. Leveroperation does not provide a graduated, metered, trim rate but resultsin full trim or no trim from the STCM’s. A cam and rollermechanism on the ARMING cable drum closes a normal openmicroswitch, that provides a signal to the digital stabilizer trim andaileron lockout modules (SAM’s) to avoid nuisance faultannunciation during a manual trim operation (UNSCHD STABTRIM message). The microswitch (S-538) position is monitored bythe SAM’s. If the switch goes to the closed position for more than30 seconds with either hydraulic system powered (left or centre), theMAN LEVER SW faultball will be set on the SAM’s.
Location and Access
Both levers are located on the top left-hand side of the centre controlstand, P-10. Access to the levers and cable drums is by removing thecentre control stand side panels.
Maintenance Practices
With the stby manual trim levers (arm and control) at neutral, theinput arms on the STCMs are aligned centrally between the index(scribe) marks on the lever stop plate by adjusting the control rods.The cable tension is adjusted by turnbuckles to comply with atension/temperature chart and to allow rig pins ST4 and ST5 (cablequadrants) to fit freely.
27.41 − HORIZONTAL STABILIZER − STANDBY MANUAL MODE - VH-EAJ TOOGD
B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 66
M00082CF.PST
STABILIZER TRIM STANDBY MANUAL MODE

ST2A
ST2B
ST1B
ST1ANOSE DOWN "CONTROL"
NOSE UP "CONTROL"
"ARM"
NOSE UP "ARM"
NOSE DOWN
NOSEDOWN
NOSEUP
FWD
STABILIZER TRIMCONTROL MODULE (STCM) (TYP)
STABILIZER TRIMCONTROL LEVER
(CONTROL)
"ARM" LEVER
LIMIT SWITCH AND POSITION TRANSMITTER MODULES (3)
STABILIZERTRIM SWITCH, S538
HYDRAULICMOTOR (2)
HYDRAULICRELEASEDBRAKE (2)
STAB TRIM STANDBY SWITCH, S538
SPRING
"ARM" CABLES
G62741CQ
.
"CONTROL" CABLES
TO THE SAM( )
g62741cq B767 − Electrical / Instrument Book 11 − Page 67STABILIZER TRIM STANDBY MANUAL MODE

General Description
The two STCM’s receive electric command inputs (autopilot ormanual electric), or manual commands (standby manual) via leversand cables , to control porting of hydraulic power to the hydraulicmotors and the hydraulically release of the secondary brakes of thestabilizer trim ballscrew actuator assembly.
Location and Access
Two interchangeable STCM’s, one right and one left, are mounted onthe bulkhead above the stabilizer ballscrew actuator assembly in thestabilizer compartment.
Components
Each STCM has seven hydraulic ports and four electrical connectors.A cleanable in-line filter screen, 100 micron, is installed in thesystem pressure port. Four singlel coil solenoid valve assemblies, forairplane nose up and nose down, ARM and CONTROL, receive theelectrical input commands.
A pressure switch, operating at 750-1000 psi, monitors the hydraulicpressure applied to the secondary brake and signals both SAM’s. A28 volt dc motor operated shut off valve is located on the lower sideof the STCM. The shut off valve has a lever indicating the positionof the valve and is used for manual override. A brake bypass buttonis located on the lower side of the STCM.
Maintenance Practices
The line replaceable units of the STCM’s are the four single coilsolenoid valves, the motor operated hydraulic shut off valve, thebrake bypass button assembly and the hydraulic pressure switch.
When the manual brake bypass button on the STCM is pushed,pressure to release the secondary brake is blocked and ported toreturn and the brake stays on. This demonstrates that the secondarybrake is capable of preventing operation of a pressurized hydraulicmotor.
27.41 − HORIZONTAL STABILIZER − STANDBY MANUAL MODE - VH-EAJ TOOGD
B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 68
M0008309.PST
STABILIZER TRIM CONTROL MODULE (STCM)

ST1A
ST1B
ST2BST2A
REARQUADRANT(TYP)
ADJUSTABLECONTROL RODS(TYP)
"ARM" INPUT
FWD
PRESSURESWITCH
RIG PINST5 HOLE
RIG PINST4 HOLE
"CONTROL"INPUT
MOTOR-OPERATEDSHUTOFF VALVE(MANUAL OVERRIDENOT SHOWN)
BRAKE BYPASSBUTTON
ON TOP OFMODULE(NOT SHOWN): PRESSURE PORT (FILTER SCREEN)
RETURN PORTELEVATOR FEEL PORT
ARM NOSE DOWN SOLENOID
ARM NOSE UP SOLENOID
CONTROL NOSE DOWN SOLENOID
CONTROL NOSE UP SOLENOID
BRAKERELEASEPORT
APLNOSE UPPORT
RETURNPORT
APL NOSEDOWN PORT
G62741CN
.
g62741cn B767 − Electrical / Instrument Book 11 − Page 69STABILIZER TRIM CONTROL MODULE (STCM)

Module Pressurized: No Control Input
System pressure of 3000 psi from the left or centre hydraulic systemis input through the filter element (100 mc cleanable in-line filterscreen) and the 28v dc motor operated shut off valve (controlled byflight compartment hydraulic cutout switches). The pressure goesthrough the rate control valve (modulated by computed elevator feelpressure to give decreasing hydraulic flow rate with increasingairspeed), through manual standby valves and solenoid valves to bothends of arm and control valves. No pressure is ported to thehydraulic motor or hydraulic brake unless both arm and controlvalves are moved in series by a control input. These two valves arespring centered as well as hydraulically centered. Valve movement isby relieving pressure on one end of the valve.
27.41 − HORIZONTAL STABILIZER − STANDBY MANUAL MODE - VH-EAJ TOOGD
B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 70
M0008340.PST
STCM OPERATION - NO CONTROL INPUT

SECONDARYBRAKE
(PRESSURERELEASED)
SECONDARYL STAB TRIM CONT
PREVENTS CWBACK-DRIVE
DISCBRAKE
PREVENTS CCWBACK-DRIVE
ELEVATORFEEL CMPTR-L
27-30-01
FLIGHT CONTROLS HYD DISTR-L
27-00-01
FLIGHT CONTROLS HYD DISTR-CTR
27-00-01
ELEV FEEL CMPTR-CTR27-30-01
NULL
NULL
BALLSCREWACTUATOR ASSY
HYD MOTOR
WL239
STABILIZER
STA 1805
ELEVFEEL
GEARBOX
HYD MOTOR
PRESSUREBRAKE REL
RETURN 2
METERED PRESSURE
RETURN
SYSTEM PRESSURE
R STAB TRIM CONTM212
MOTOR OPERATED
VALVE
"ARM" APL NOSE
UP SOL
"ARM" APL NOSE
DN SOLELEV FEELRETURN 1PRESSURE
"CONTROL" APL NOSE
UP SOL
MANUALBRAKE
BYPASS"CONTROL" VALVE
"ARM" VALVE
RATE CONTROLVALVE
"CONTROL" APL NOSE
DN SOL
PRESSURE- BRAKERELEASE
PRIMARY BRAKE (RATCHED)
M211
INTERNALS SAME AS M212
PRESSURE
BRAKE(PRESSURERELEASED)1
RETURN 2
PRESSURE- APL NOSE DN
PRESSURE- APL NOSE UP
BRAKE PRESSURE SW
FWD
UP
APL NOSE UP
APL NOSE UP
APL NOSE DN
APL NOSE DN
1
RETURN 1
2
3
PRESSURE - APL NOSE UP
PRESSURE - APL NOSE DOWN
62741BDA
MANUALSTANDBY
"ARM"VALVE
APL NOSE DN
APL NOSE UP
BRAKEPRESSURE SW
"ARM"APL NOSE
DN SOL
"ARM"APL NOSE
UP SOL
MANUALSTANDBY
"CONTROL"VALVE
APL NOSE DN
APL NOSE UP
"CONTROL"APL NOSE
DN SOL
"CONTROL"APL NOSE
UP SOL
PRESSUREAPL NOSE DN
PRESSUREAPL NOSE UP
INTERNALS SAME AS M212
g62741bd B767 − Electrical / Instrument Book 11 − Page 71STCM OPERATION - NO CONTROL INPUT

Manual Input: Nose Up Trim
Mechanical input from the standby manual trim levers (P10),throughthe stabilizer trim cable system is input to the stabilizer trim controlmodule ( STCM) at the manual standby arming and control valves.The spring centering on these valves provide for returning thestandby manual trim levers to the neutral position when they arereleased. Movement of the standby manual valves to the nose upposition will cause relief of hydraulic pressure on the ends of themain arm and control valves, moving them both to the nose upposition.
NOTE: The standby manual valves are upstream of the solenoidvalves, thus establishing manual priority over all electricalinputs.
Metered flow from system pressure through the rate control valve,now has a path through the arm and control valves in series torelease the hydraulic brake and to power the nose up side of thehydraulic motor. The pressure at the brake pressure switch causes afeedback signal to the digital stabilizer trim and aileron lockoutmodule ( SAM ).
Both hydraulic released brakes and hydraulic motors act through thedifferential gearbox assembly to trim the stabilizer for airplane noseup trim. The ratchet drum brake is always engaged to prevent airloads from back driving the stabilizer.
27.41 − HORIZONTAL STABILIZER − STANDBY MANUAL MODE - VH-EAJ TOOGD
B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 72
M0008358.PST
STCM OPERATION - NOSE UP INPUT

SECONDARYBRAKE
(PRESSURERELEASED)
SECONDARYL STAB TRIM CONT
PREVENTS CWBACK-DRIVE
DISCBRAKE
PREVENTS CCWBACK-DRIVE
ELEVATORFEEL CMPTR-L
27-30-01
FLIGHT CONTROLS HYD DISTR-L
27-00-01
FLIGHT CONTROLS HYD DISTR-CTR
27-00-01
ELEV FEEL CMPTR-CTR27-30-01
BALLSCREWACTUATOR ASSY
HYD MOTOR
WL239
STABILIZER
STA 1805
ELEVFEEL
GEARBOX
HYD MOTOR
PRESSUREBRAKE REL
RETURN 2
METERED PRESSURE
RETURN
SYSTEM PRESSURE
R STAB TRIM CONTM212
MOTOR OPERATED
VALVE
"ARM" APL NOSE
UP SOL
"ARM" APL NOSE
DN SOLELEV FEELRETURN 1PRESSURE
"CONTROL" APL NOSE
UP SOL
MANUALBRAKE
BYPASS"CONTROL" VALVE
"ARM" VALVE
RATE CONTROLVALVE
"CONTROL" APL NOSE
DN SOL
PRESSURE- BRAKERELEASE
PRIMARY BRAKE (RATCHED)
M211
INTERNALS SAME AS M212
PRESSURE
BRAKE(PRESSURERELEASED)1
RETURN 2
PRESSURE- APL NOSE DN
PRESSURE- APL NOSE UP
BRAKE PRESSURE SW
FWD
UP
1
RETURN 1
2
3
PRESSURE - APL NOSE UP
PRESSURE - APL NOSE DOWN
62741BEA
MANUALSTANDBY
"ARM"VALVE
BRAKEPRESSURE SW
"ARM"APL NOSE
DN SOL
"ARM"APL NOSE
UP SOL
MANUALSTANDBY
"CONTROL"VALVE
"CONTROL"APL NOSE
DN SOL
"CONTROL"APL NOSE
UP SOL
PRESSUREAPL NOSE DN
PRESSUREAPL NOSE UP
INTERNALS SAME AS M212
NOSE DOWN
NOSE DOWN
NOSE UP
NOSE UP
NOSE DOWN
NOSE DOWN
g62741be B767 − Electrical / Instrument Book 11 − Page 73STCM OPERATION - NOSE UP INPUT

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age74
INT
EN
TIO
NA
LLYB
LAN
K

STABILIZER TRIM FAULT INDICATION
g62741be B767 − Electrical / Instrument Book 11 − Page 75

General Description
Both SAM’s monitor the stabilizer trim functions and annunciatefaults by displaying EICAS messages, illuminating amber lights onthe P5 panel and setting fault balls on the face of the SAM’s.
Fault Balls
There are eleven fault balls on the face plate of the SAM module, ifone or more are set the maintenance message “STAB TRIM” appearson EICAS.
Flight Messages and Lights
When the stabilizer moves without command or moves in theopposite direction than one commanded during autopilot operation orMach trim, the caution (B) level message “UNSCHD STAB TRIM”appears on EICAS and the amber light UNSCHED STAB TRIMilluminates on the P5 panel.
NOTE: The AUTOPILOT light on the P1–3 panel and EICAScaution message will also appear to alert the crew to lossof autostabilizer trim capability.
When only half rate trim results from a pilots manual electric triminput, the advisory (C) level message “STAB TRIM” appears onEICAS and the amber light STAB TRIM illuminates on the P5 panel.
Anytime a fault ball is set on the face of a SAM, the EICASmaintenance message STAB TRIM will appear.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 76
M00085C7.PST
STABILIZER TRIM FAULT INDICATION

E1-1SAM (L);E2-1
SAM (R);
(P2)EICAS DISPLAY UNITS
STAB TRIM
PILOT’S OVHD
a
WARNINGUNSCHED
STAB TRIM
UNSCHD STAB TRIM
PANEL (P5)
STAB
MAIN EQUIPMENT CENTER
STAB TRIMR
MASTER CAUTIONWARNING LIGHT(2 PLACES) P-7
ACAUTION
TRIM
a
G62741BP
"B""C"
g62741bp B767 − Electrical / Instrument Book 11 − Page 77STABILIZER TRIM FAULT INDICATION

General Description
Both SAM’s monitor the stabilizer position to detect and annunciateunscheduled stabilizer motion.
Unscheduled motion is movement without a valid SAM trimcommand which requires both arm and control commands in thesame direction. These valid SAM commands occur in manualelectric, mach trim and auto trim modes. Standby manual trimcommands are not routed through the SAM’s.
An unscheduled stabilizer motion is detected by the SAM’s when thestabilizer moves more than approximately one-half degree without avalid SAM trim command, or the stabilizer moves opposite to thecommand direction. The SAM’s detect this unscheduled motion onlyduring mach trim and auto trim engagement.
A SAM fault disables the unscheduled stab trim detection from thatSAM.
Manual Electric Trim
Manual electric trim operation disengages mach trim and singlechannel auto trim and causes a valid SAM trim output. Therefore,the SAM’s do not detect unscheduled motion.
Standby Manual Trim
Standby manual trim operation disengages mach trim but not autotrim. Because they are not routed through the SAM’s, standbymanual trim commands during auto trim operation cause the SAM’sto detect unscheduled motion.
If the standby manual trim is operated without any other trimoperating, a normally open micro switch is activated in the armingcable and sends an unscheduled trim inhibit to the SAM’s.
Fault Annunciation
When a SAM detects an unscheduled stabilizer motion in autotrimmode, it causes the UNSCHED STAB TRIM light (P5) and EICASUNSCHD STABILIZER caution (B) message to appear. Theannunciation is not latched and is removed when the stabilizer stopsmoving.
Providing the standby trim is not being operated and an unscheduledtab trim is detected, the STCM fault ball on the SAM is set.
NOTE: Loss of autostabilizer trim capability from the activeautopilot annunciates the AUTOPILOT light and B levelmessage on EICAS.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 78
M0008744.PST
UNSCHEDULED STAB TRIM

a
TAT + 12CUNSCHED STAB TRIM
EICASCOMPUTER
MACH TRIM
SAM FAULTLATCH
LEFT OR RIGHT SAM
STAB TRIMUNSCHED
PILOT’S OVERHEADPANEL (P5)
a
r
CAUTION
WARNING
62741CCA
AUTO TRIMSTAB MOVES> 0.55 WITHOUTVALIDTRIM CMD
STAB MOVESOPPOSITETO CMDDIRECTION
STAB MOTIONSTOPS
MAN/ELECT TRIMANY FCC ENGAGED
STANDBY MANUAL MODEOR ALTERNATE ELECTRIC
UNSCHEDULEDSTAB
MODEENGAGED
MODEENGAGED
AUTOPILOT
AUTO PILOT
P1 - 3
g62741cc B767 − Electrical / Instrument Book 11 − Page 79UNSCHEDULED STAB TRIM

Detection of Half Rate Trim During Manual ElectricTrim
Both SAM’s monitor hydraulic pressure to the secondary brakes ofthe ballscrew actuator assembly. Hydraulically releasing thesecondary brakes allows hydraulic motors to drive the gearbox andballscrew.
The SAM’s detect trim rate by monitoring the pressure switches onthe STCM’s. If a pressure switch disagreement occurs during manualelectric trim, both SAM’s detect half trim rate when full trim rate iscommanded.
The SAM’s cannot detect a trim rate fault when making an alternateelectric trim command.
NOTE: Detection of neither brake release, with a valid command,will not cause annunciation of STAB TRIM. Trim monitorcircuits will not cause STAB TRIM indication if half rate oftrim is detected while using the standby manual trim leversdue to the standby lever ARM switch inhibit.
Fault Annunciation
When half trim rate is detected during manual electric trim, theSTAB TRIM light on P5 panel and STAB TRIM advisory EICASmessage appear. The SAM latches this annunciation.
Reset is by one of the following:
• Pushing the RESET button on the SAM.• Powering up the SAM.
• Restoring left or centre hydraulic system pressure (If loss ofpressure was the cause).
• Both brake pressure switches sense high pressure when a manualelectric trim command is made.
NOTE: The STAB TRIM light illuminates along with STAB TRIMadvisory EICAS message, if manual electric trim isrequested and either the left or centre hydraulic system isdepressurized or if either of the stabilizer trim hydrauliccutout switches are operated.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 80
M000875E.PST
STAB TRIM RATE FAULT

VALID TRIM RATE
C HYD SYS PRESS RESTORED
L HYD SYS PRESS RESTORED
POWER UP
MAINT RESET
SAM FAULT
LATCHTRIM COMMANDELECTRICVALID MANUAL
BRAKER STCM
PRESS SW
BRAKEL STCM
PRESS SW
L OR R SAM
RESET
RATEFAULT
STABTRIM a
COMPUTEREICAS
UPPER EICAS DISPLAY UNIT (P2)
STAB TRIM
PANEL (P5)OVERHEADPILOT’S
62741CDA
g62741cd B767 − Electrical / Instrument Book 11 − Page 81STAB TRIM RATE FAULT

General Description
The faceplate of the SAM contains eleven fault balls for displayingthe fault status of various line replaceable units ( LRU’s) interfacingwith the SAM.
Three faults have dual labels, one label is applicable to the 767, theother to the 757 airplane. For the fault labeled FSPM/ SPM, onlyFSPM applies to the 767. For fault balls labeled L AIL LOCKACT/ELEV ASY ACT and R. AIL LOCK ACT/ FSEU, only L. AILLOCK ACT and R. AIL LOCK ACT apply to the 767.
Each fault ball is latched to display a black or yellow (fault)indication. Pushing the reset button on the SAM faceplate resets allyellow balls after the fault condition is cleared. Certain fault ballsreset automatically in the air or on the ground when the faultycondition is no longer present.
Any fault ball set on a SAM causes a maintenance (M) levelmessage STAB TRIM to appear on EICAS. The message is notlatched in the EICAS memory.
Three fault balls, FCC, FSPM and SAM are related to faults in thestabilizer auto trim mode. The remaining fault balls are associatedwith alternate electric trim, manual electric trim and outboard aileronlockout.
SAM Fault Ball
An internal failure of the SAM sets the SAM fault ball. When theSAM fault ball is set, it disables all other fault annunciation on theSAM.
FCC Fault Ball
An FCC failure or an ARINC 429 digital data bus fault sets the FCCfault ball. The fault is cleared if valid data is continuously receivedfor 5 seconds.
ADC Fault Ball
An ADC failure, an ARINC 429 digital data bus fault or faults indata comparison between the two ADC’s set the ADC fault ball. Thefault is cleared if valid data is continuously received for at least 30seconds.
Data comparison faults that occur in the air and are present during anair to ground transition latch the fault ball. In this case only pushingthe reset button can reset the fault ball.
FSPM Fault Ball
An out of tolerance condition of the stabilizer position signal or theflaps retracted discrete signal from the FSPM’s set the FSPM faultball.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 82
M00086CA.PST
SAM FAULT BALLS

ANY FAULT BALL SET
PRESS TO MANUALLY RESET FAULT BALLS
IF THIS FAULT BALL IS SET FIRST,THE OTHER FAULT BALLS WILL NOT SET
(LEVEL M)STAB TRIM
EICAS COMPUTERS
LOCKOUT MODULE (SAM)STABILIZER TRIM AILERON
757INTERFACING LRU’S
SPM
RESET
SAM
ELEV ASY L ACTL. AIL LOCK ACT/
MAN LEVER SW
AIR-GND RELAY
COL TRIM SW
HYD PRESS SW
STCM
ADC
767/
FSEUR. AIL LOCK ACT/
FSPM/
FCC
62741CAA
g62741ca B767 − Electrical / Instrument Book 11 − Page 83SAM FAULT BALLS

FSPM Fault Ball (Continued)
A stabilizer position signal input of less than +1.0 volt dc or an opencircuit present for 1.5 seconds is a failed condition. When the faultclears the fault ball is automatically reset.
If one of the three FSPM’s discrete signals is different from theothers or the remaining two discrete signals differ for more than 5seconds, the FSPM fault ball sets. The fault ball resets automaticallywhen all three signals agree.
AIR-GND RELAY Fault Ball
When there is a disagreement between the three air/ground inputs toSAM the AIR-GND RELAY fault balls is set. If the fault occurred inflight and is repaired after landing, the fault ball resets automaticallywhen all three systems transition to the air or the reset button ispushed. otherwise the fault ball resets automatically when all threeinputs agree.
COL TRIM SW Fault Ball
A disagreement between the manual electric control switch inputssets the COL TRIM SW fault ball. The fault ball resets automaticallywhen the SAM senses valid trim commands.
It is set by the manual trim input coincidence monitor and detectsfaults in the thumb switches.
STCM Fault Ball
A secondary brake pressure switch sensing high pressure for 2seconds without an auto trim command or stabilizer does not movewithin 2 seconds of a auto trim command sets the STCM fault ball.The second fault condition requires a hydraulic system pressuresignal to set the fault ball.
The first fault condition has no auto reset. It requires pushing thereset button to reset the fault ball after the fault is repaired.
The second fault condition resets automatically when the fault clearsand high pressure to the brake is sensed within one second of a autotrim command.
NOTE: The STCM fault ball will not be set when low hyd press issensed by the SAM. It will set the HYD PRESS fault ballinstead.
HYD PRESS SW Fault Ball
A failure of the demand hydraulic pump control pressure switchesthat monitor the left and centre hydraulic system pressure, sets theHYD PRESS SW fault ball. The fault ball resets automatically or bypushing the RESET button after the fault is repaired.
Low hydraulic press also sets the fault ball.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 84
M00086CA.PST
SAM FAULT BALLS(Continued)

ANY FAULT BALL SET
PRESS TO MANUALLY RESET FAULT BALLS
IF THIS FAULT BALL IS SET FIRST,THE OTHER FAULT BALLS WILL NOT SET
(LEVEL M)STAB TRIM
EICAS COMPUTERS
LOCKOUT MODULE (SAM)STABILIZER TRIM AILERON
757INTERFACING LRU’S
SPM
RESET
SAM
ELEV ASY L ACTL. AIL LOCK ACT/
MAN LEVER SW
AIR-GND RELAY
COL TRIM SW
HYD PRESS SW
STCM
ADC
767/
FSEUR. AIL LOCK ACT/
FSPM/
FCC
62741CAA
g62741ca B767 − Electrical / Instrument Book 11 − Page 85SAM FAULT BALLS
(Continued)

MAN LEVER SW Fault Ball
A failure of the microswitch connected to the ARM alternate electrictrim switch sets the MAN LEVER SW fault ball. The microswitchhas failed when it is closed for more than 30 seconds and hydraulicpressure is high in the left or centre system. The fault ball restsautomatically when the microswitch is open for more than 2 seconds.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRIM FAULT INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 86
M00086CA.PST
SAM FAULT BALLS(Continued)

ANY FAULT BALL SET
PRESS TO MANUALLY RESET FAULT BALLS
IF THIS FAULT BALL IS SET FIRST,THE OTHER FAULT BALLS WILL NOT SET
(LEVEL M)STAB TRIM
EICAS COMPUTERS
LOCKOUT MODULE (SAM)STABILIZER TRIM AILERON
757INTERFACING LRU’S
SPM
RESET
SAM
ELEV ASY L ACTL. AIL LOCK ACT/
MAN LEVER SW
AIR-GND RELAY
COL TRIM SW
HYD PRESS SW
STCM
ADC
767/
FSEUR. AIL LOCK ACT/
FSPM/
FCC
62741CAA
g62741ca B767 − Electrical / Instrument Book 11 − Page 87SAM FAULT BALLS
(Continued)

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age88
INT
EN
TIO
NA
LLYB
LAN
K

STABILIZER TRAVEL LIMITS
g62741ca B767 − Electrical / Instrument Book 11 − Page 89

General Description
The full movement of the stabilizer is from 0 unit to 14.2 units, oneunit is equal to approximately one degree.
The neutral position of the stabilizer is at 2.0 units. At the neutralposition the stabilizer is aligned with the longitudinal axis of theairplane.
Travel Limits
Travel limiting devices control the range of stabilizer movement inall operating modes. Upper and lower mechanical stops limit thestabilizer travel at each end of the range. In the electrical controlmode, limit switches prevent stabilizer travel beyond that required bythe normal flight envelope.
The upper limit in the SAM electrical mode is provided at 0.5 unitswith the flaps extended and at 1.5 units with the flaps retracted. Thelower electrical limit is provided at 11.8 units.
The stabilizer trim limits for takeoff are between 1.0 unit and 7.0units. These limits are indicated by a green bank on the stabilizerposition indicators.
Three painted marks on the fuselage indicate stabilizer position.
The neutral shift of the elevator starts at the stabilizer position of 8.5units. As the stabilizer leading edge is moved further down, theelevator trailing edge is moved up gradually to reach the maximumshift of 5.7 degrees with the stabilizer positioned at 14.2 units.
27.41 − HORIZONTAL STABILIZER − STABILIZER TRAVEL LIMITS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 90
M00141D4.PST
STABILIZER TRAVEL LIMITS – 200 AIRCRAFT

14.2 UNITS
11.8 UNITS NOSE UPTRIM
AIRPLANE
LIMITELECTRICALLOWER
STOPMECHANICALLOWER
NOTE:
ONE UNIT OF STABILIZER
TRIMNOSE DOWNAIRPLANE
ELECTRICALUPPER
EXTENDED
UPPERMECHANICALSTOP
0 NEUTRAL
(GREENBAND)TRIM LIMITSTAKEOFF
7.0 UNITS
1.5 UNITS
0.5UNITS0.0 UNIT
2.0 UNITS
LIMIT FLAPS
ELEVATOR
STABILIZERHORIZONTAL
TRAVEL EQUALS APPROXIMATELYONE DEGREE G62741CJ
.
1.0 UNIT
8.5 UNITS NEUTRALSHIFT OFELEVATOR
UPPER ELECTRICAL LIMITFLAPS RETRACTED
5.7
g62741cj B767 − Electrical / Instrument Book 11 − Page 91STABILIZER TRAVEL LIMITS – 200 AIRCRAFT

General Description
The full movement of the stabilizer is from 0 unit to 14.2 units, oneunit is equal to approximately one degree.
The neutral position of the stabilizer is at 2.0 units. At the neutralposition the stabilizer is aligned with the longitudinal axis of theairplane.
Travel Limits
Travel limiting devices control the range of stabilizer movement inall operating modes. Upper and lower mechanical stops limit thestabilizer travel at each end of the range. In the electrical controlmode, limit switches prevent stabilizer travel beyond that required bythe normal flight envelope.
The upper limit in the SAM electrical mode is provided at 0.25 unitswith the flaps extended and 1.5 units with the flaps retracted. Thelower limit is provided at 12.8 units.
Stabilizer trim limits for takeoff are between 0.25 units and 7.0 units.These limits are indicated by a green band on the pilots stabilizerposition indicators.
Three painted marks on the fuselage indicate stabilizer position.
27.40 − HORIZONTAL STABILIZER − STABILIZER TRAVEL LIMITS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 92
M00081E7.PST
STABILIZER TRAVEL LIMITS —300 AIRCRAFT

14.2 UNITS
12.8 UNITS NOSE UPTRIM
AIRPLANE
LIMITELECTRICALLOWER
STOPMECHANICALLOWER
RETRACTED
ELECTRICALUPPER
NOTE:
ONE UNIT OF STABILIZER
TRIMNOSE DOWNAIRPLANE
ELECTRICALUPPER
EXTENDED
UPPERMECHANICALSTOP
0.0 NEUTRAL
(GREENBAND)TRIM LIMITSTAKEOFF
7.0 UNITS
1.5 UNITS
0.25 UNITS0.0 UNIT
2.0 UNITS
LIMIT FLAPS
LIMIT FLAPS
ELEVATORSTABILIZERHORIZONTAL
TRAVEL EQUALS APPROXIMATELYONE DEGREE
G62741AJ
.
g62741aj B767 − Electrical / Instrument Book 11 − Page 93STABILIZER TRAVEL LIMITS —300 AIRCRAFT

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age94
INT
EN
TIO
NA
LLYB
LAN
K

STABILIZER POSITION INDICATION
g62741aj B767 − Electrical / Instrument Book 11 − Page 95

General Description
The stabilizer trim limit switch and position transmitter modulesprovide:
• Stabilizer travel limits during electric trim control.• A signal to the takeoff configuration warning system that the
stabilizer position is within the greenband.• Stabilizer position feedback signals to the SAM’s and the FCC’s.• Signals to operate the stabilizer position indicators.
Limit Switches and Position Transmitter Modules
Each of the three identical modules, located below the stabilizer inthe stabilizer compartment, contain cam operated limit switches tolimit stabilizer movement in a SAM trim mode and to signal thetakeoff warning module. They also contain an RVDT for sendingfeedback signals to the SAM’s and FCC’s and, a position synchrofor driving the stabilizer position indicators on the control stand. Themodules are labeled left, centre and right relative to their position inthe stabilizer compartment.
Operation
A drum connected by a cable to the stabilizer drives each stabilizertrim limit switch and position transmitter module. As the stabilizermoves, the cables drive the drum which rotate the module inputshaft.
Maintenance Practices
Access to the stabilizer trim and position transmitter modules is byopening the access door to the stabilizer compartment.
The three modules are line replaceable units and are interchangeable.No field adjustment is required on the modules. Each module isreplaced without disturbing the cable drive system. The modulespline shaft has a missing tooth which is aligned with the missingtooth of the splined drum.
With the stabilizer set to the electrical neutral of 7 units, the cablesare tensioned to a tension/ temperature chart and to fit rig pins ineach LSPM drum.
27.41 − HORIZONTAL STABILIZER − STABILIZER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 96
M00084BA.PST
LIMIT SWITCH AND POSITION TRANSMITTER MODULES

TURNBUCKLE
STABILIZER
LIMIT SWITCH & POSITION TRANSMITTER MODULE
RVDT
SYNCHRO
SWITCHACTUATIONCAMS
SPACER (TYP)SHAFT
GEARS
INPUTSPLINED
(MISSINGTOOTH)
STOPARM
LIMIT SWITCH (TYP)
PULLEY
UPPER CABLE
TURNBUCKLE
LOWER CABLE
VIEW LOOKING FORWARDSECTION A-A____________
RIG PINNO. 1
RIG PINNO. 2
RIG PINNO. 3
UP
A
AFWD
UP
62748AAA
g62748aa B767 − Electrical / Instrument Book 11 − Page 97LIMIT SWITCH AND POSITION TRANSMITTER MODULES

General
Each LSPTM contains five cam actuated microswitches, one synchroand one rotary variable displacement transducer (RVDT). Althoughall three modules are identical and interchangeable, each servesdifferent function as determined by the wiring of the electricalconnectors.
Limit Switches
These switches in the left and right LSPTMs,will interrupt theelectrical trim signal to the hydraulic stabilizer trim control modules(STCMs) solenoids, providing the limits for electrical stabilizer trim.
The up limit switch of the stabilizer is a function of the flap position.With the flaps retracted the stabilizer up limit is 1.5 units. With theflaps extended the stabilizer up limit is 0.5 units.The down limitswitch operates at 11.8 units.
Neutral Shift Switches
Because the column is physically moved aft by elevator neutral shift,these switches in the left and right LSPTM, allow selection of theappropriate column aft cutout switches . From 0 to 8.4 units ofstabilizer trim, the 2.0° to 2.5° column aft switch will be active.From 8.4 to 14.5 units of stabiliser trim, the 3.0° to 3.5° column aftswitch will be active as it is selected by the neutral shift switches inthe left and right trim limit switch and position transmitter modules(LSPTM).
Greenband Switch
The switch (centre LSPTM) provides a signal (switch closed) to theconfiguration warning card when the stablizer is within the takeofftrim limits (1.0 to 7.0 units of trim. Outside of these limits, theswitch will open and the appropriate configuration warning(STABILISER A level message) will be annunciated.
RVDT
The RVDTs, in the left,right and centre LSPTMs, send an ac voltagesignal, corresponding to stabilizer position, to the flap/stabliserposition modules (FSPMs) in the P-50 card file for conversion to auseable dc signal for various digital user systems.
Synchro
The synchro in the left and right modules drive, respectively, the leftand right stabiliser position indicator on the control stand. Thesynchro in the centre module is not used. The left synchro also sendsa stabilizer position signal to the flight data recorder.
27.48 − HORIZONTAL STABILIZER − STABILIZER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 98
M00141E6.PST
TRIM LIMIT SWITCH AND POSITION TRANSMITTER MODULES (LSPTM) — 200 AIRCRAFT

UP LIMIT
DOWN LIMIT
NOT USED
NOT USED
SWITCH 5
SWITCH 3
SWITCH 2
CONNECTORELECTRICAL
SWITCH 5
SWITCH 3
SWITCH 2
FSPM (C)FSPM (L)
(VIEW LOOKING FORWARD)
FUNCTIONCOMPONENT
MODULE (3)POSTION TRANSMITTERLIMIT SWITCH AND
BANDGREEN
CONNECTORELECTRICAL
CONNECTORELECTRICAL
CAPTAIN’S INDICATOR &FLIGHT RECORDER
UP LIMIT SWITCH 1
RVDT
SYNCHROSYNCHRO
RVDT
SWITCH 1
FUNCTIONCOMPONENT
RCL
NEUTRAL SHIFT
SWITCH 4
NOT USED
NOT USED
NOT USED
SWITCH 5 NOT USED
UP LIMIT
DOWN LIMIT
NOT USEDSWITCH 5
SWITCH 3
SWITCH 2
FSPM (R)
F/O’S INDICATOR
UP LIMIT
SYNCHRO
RVDT
SWITCH 1
FUNCTIONCOMPONENT
NEUTRAL SHIFT
SWITCH 4
G62748AE
.
g62748ae B767 − Electrical / Instrument Book 11 − Page 99
TRIM LIMIT SWITCH AND POSITION TRANSMITTERMODULES (LSPTM) — 200 AIRCRAFT

General Description
Each limit switch and position transmitter module contains fourmicro-switches, one RVDT and one synchro.
Limit Switches
The first three switches in the left and right modules control the upand down limits during SAM electric trim. When the flaps areextended, the number 1 switches limit stabilizer travel to 0.25 units.When the flaps are retracted, the number 2 switches limit stabilizertravel to 1.5 units. Switches number 3 open at 12.8 units of trim.Switches number 4 in the left and right modules are not used.
Green Band Switch
Switch number 4 in the centre module controls the signal to thetakeoff configuration warning system when the stabilizer is within thegreenband. The switch is closed when the stabilizer is between 0.25and 7.0 units of trim. Switches number 1, 2 and 3 in the centremodule are not used.
RVDT/SYNCHRO
The RVDT in each module provides a signal to its dedicated flap /stabilizer position module (FSPM). The synchro in the left and rightmodules drive, respectively, the left and right stabilizer positionindicator on the control stand. The synchro in the center module isnot used.
27.41 − HORIZONTAL STABILIZER − STABILIZER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 100
M0008500.PST
LIMIT SWITCH AND POSITION TRANSMITTER DETAILS —300 AIRCRAFT

UP LIMIT
DOWN LIMIT DOWN LIMIT
UP LIMIT
NOT USED
NOT USED
NOT USED
NOT USED
NOT USED
INDICATORF/O’S
FSPM (R)
SWITCH 4
SWITCH 3
SWITCH 2
UP LIMIT
SWITCH 4
SWITCH 3
SWITCH 2
FUNCTIONCOMPONENT
CONNECTORELECTRICAL
SWITCH 1
RVDT
SYNCHRO
SWITCH 4
SWITCH 3
SWITCH 2
FSPM (C)FSPM (L)
FLIGHT RECORDERINDICATOR AND
(VIEW LOOKING FORWARD)
FUNCTIONCOMPONENT
NOT USED
MODULE (3)POSTION TRANSMITTERLIMIT SWITCH AND
BANDGREEN
CONNECTORELECTRICAL
CONNECTORELECTRICAL
CAPTAIN’S
UP LIMIT SWITCH 1
RVDT
SYNCHROSYNCHRO
RVDT
SWITCH 1
FUNCTIONCOMPONENT
RCL
62748ACA
g62748ac B767 − Electrical / Instrument Book 11 − Page 101
LIMIT SWITCH AND POSITION TRANSMITTER DETAILS—300 AIRCRAFT

Location
The photo shows the three limit switch and position transmittermodules located within the stabilizer area under the stabilizer.
27.41 − HORIZONTAL STABILIZER − STABILIZER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 102
M00084E6.PST
LIMIT SWITCH AND POSITION TRANSMITTER MODULES PHOTOGRAPH

g62748ab B767 − Electrical / Instrument Book 11 − Page 103
LIMIT SWITCH AND POSITION TRANSMITTER MODULESPHOTOGRAPH

Operation
The stabilizer trim position indicators contain electronic circuitry totake the synchro signal from the limit switch and position transmittermodules and drive an indicating tape to show stabilizer position.Indication is totally electrical, there are no motion disks and noaudible indication of stabilizer movement. The Indicator scale rangeis from 0 to 14.5 units with 1 unit equal to 1 degrees of stabilizermovement. 0 units is +2.0 degrees stabilizer leading edge up and14.5 units is -12.5 degrees stabilizer leading edge down for the fullrange of stabilizer movement. The greenband indicator is a paintedon marking, nonadjustable, for acceptable stabilizer position fortakeoff configuration.
Loss Of Power
Loss of power to the indicator causes the indicating tape to be blackand the lower portion to display the word OFF in amber and white.
Loss Of Input Signal
Loss of input signal from the drive synchro will cause the wholeindicating tape to be black.
Location and Access
There are two stabilizer trim position indicators located on the centrecontrol stand and accessible through the flight compartment. Thecaptain’s indicator is on the left side of the control stand and the firstofficer’s indicator is on the right side.
Maintenance Practices
Each indicator is an LRU held in place on the control stand by fourphillips head screws. There is no lubrication or adjustment requiredon the Indicators.
27.41 − HORIZONTAL STABILIZER − STABILIZER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 104
M0008512.PST
STABILIZER TRIM POSITION INDICATORS

POSN IND
LIGHTINGINSTRUMENT
P11-2 CKT BKR PNL
POSN INDINDICATOR POSN XMTR MODULE
L LIMIT SW ANDCAPTAIN’S POSITIONL STAB TRIM
H-20L BUS28V AC
POSN XMTR MODULER LIMIT SW AND
POSITION INDICATORFIRST OFFICER’S
P11-5 CKT BKR PNL
R BUS28V AC
R STAB TRIMH-1
INDICATOR
LIGHTINGINSTRUMENT
LIMIT SWITCHAND POSITION
MODULES (3)TRANSMITTER
SECTIONCENTERSTABILIZER
POSITIONF/O
FWD
62748ADA
g62748ad B767 − Electrical / Instrument Book 11 − Page 105STABILIZER TRIM POSITION INDICATORS

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age106
INT
EN
TIO
NA
LLYB
LAN
K

SUMMARY
g62748ad B767 − Electrical / Instrument Book 11 − Page 107

System General Description
When the secondary brakes are released one or both hydraulicmotors operate the ballscrew actuator assembly which moves thestabilizer. Solenoid valves on two STCM’s control hydraulic powerto their respective motor and brake.
Two hydraulic cutout switches on the control stand directly controlsa hydraulic shut off valve on each STCM.
Two SAM’s monitor the operation of the stabilizer and provideelectric trim control. The left and right SAM’s are dedicated to theleft and right STCM’s respectively.
Cables and pulleys transmit the movement of the stabilizer to threelimit switch and position transmitter modules. These modules containlimit switches, RVDT’s and synchros.
Three FSPM’s modify the electrical signal from the RVDT’s of thelimit switch and position transmitter modules and send it to theFCC’s and the SAM’s. The FSPM’s also provide both SAM’s withdiscrete signals when the flaps are retracted. The discrete signalsfrom the left and right FSPM’s also control the trim limit selectrelays.
Air/ground discrete signals and left and centre hydraulic systempressure discrete signals are provided to both SAM’s.
Both SAM’s also receive mach data from both ADC’s.
Alternate Electric Trim
Alternate electric trim is a direct full rate trim input to the stabilizer.
Alternate Electric Trim (OGE – OGQ)
These aircraft have electric switches on the pedestal for alternateelectric trim. When both alternate electric trim switches, on thecontrol stand are moved simultaneously in the same direction, theydirectly power the solenoid valves on both STCM’s resulting in thestabilizer movement at full rate of speed.
Stby Manual Trim (EAJ – OGD)
These aircraft have manual levers on the pedestal for stby manualtrim. The stby manual trim levers input directly to both STCM’sresulting in the stabilizer movement at full rate of speed.
Manual Electric Trim
Two manual electric trim switches on each pilot control wheel sendelectric power signals to both SAM’s. The switches are movedsimultaneously in the same direction. The electric CONTROL signalsdirectly power the CONTROL solenoids of both STCM’s. The ARMsignals pass through the elevator column cutoff switches, the trimselect relays and the limit switches of the limit switch and positiontransmitter modules before powering the ARM solenoids of bothSTCM’s. The stabilizer moves at full rate.
27.41 − HORIZONTAL STABILIZER − SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 108
M00087D0.PST
HORIZONTAL STABILIZER TRIM SYSTEM

CONTROLCOLUMN
FIRSTOFFICER’S
CONTROLCOLUMN
CAPTAIN’S
LOG
IC C
RO
SS
FE
ED
FIRSTOFFICER
TRIMSWITCH
1
TDA
TUATDC
BRAKE RELEASETUC
BRAKE RELEASE
TUCTDCTUA
TDA
4
UNSCHED
86
5
AIR/GNDLOGIC
4 7
ELECTRICAL
MECHANICAL
DATA BUS
HYDRAULIC
LIMIT SWITCH AND POSITION XMTR MODULES1
SAM L
SAM R
MACHTRIM
MACHTRIM
TRIMSWITCH
CAPTAIN
6
(L)FCC
ADC(R)
ADC(L)
FCC(C)
2
3
(R)FCC
HYD SYSC
PRESS
TDC
ADC
TUATDATUC
EICAS
FCC
SAM
RVDT
FSPM
- TRIM DOWN CONTROL
SYSTEM AND CREW ALERTING
- AIR DATA COMPUTER
- TRIM UP ARM- TRIM DOWN ARM- TRIM UP CONTROL
- ENGINE INDICATING
COMPUTER- FLIGHT CONTROL
LOCKOUT MODULE- STABILIZER TRIM AND AILERON
TRANSDUCER- ROTARY VARIABLE DISPLACEMENT
- FLAP/STAB POSITION MODULE
LOGICAIR/GND L HYD SYS
PRESSURE
2 3 4
SYNCHRO (R)
1
EICAS
(2)COMP
TRIM LTSTAB
STAB LT
1
HYDRAULICCUTOUT SWITCHES
SELECT RELAYTRIM LIMIT
SELECT RELAYTRIM LIMIT
FLAPS RETRACTEDFLAPS NOT RETRACTED
4
2
DOWNLIMIT
1
TRIMDOWNLIMIT
TRIM
1
FLAPS RETRACTEDFLAPS NOT RETRACTED
TRIM UP LIMIT
TRIM UP LIMIT
BRAKE
MOTOR
STABILIZERTRIM BALLSCREW
ASSEMBLY
MOTOR
BRAKE
NOSE UP
NOSE UP
PRESSURE
NOSE DWN
NOSE DWN
ARM
STABILIZERTRIMCONTROL
CONTROL
ARM
STABILIZERTRIMCONTROL
CONTROL
MODULE (L)
MODULE (R)
SOV
SOV
11RVDT
(L)
(L)
RVDT(C)
(C)
RVDT(R)
(R)
1
ELEVATOR
HYDRAULIC
FEEL PRESSURE (L)
SYSTEM (L)
PRESSUREBRAKE RELEASE
FSPM FSPMFSPM
HYDRAULIC
ELEVATOR FEELSYSTEM (C)
PRESSURE (C)
SWITCHES
CONTUP
DNUP
ARM
DN
ELECTRICALTERNATE
2
8
75
BRAKE RELEASE
SOV - SHUTOFF VALVE
STABILIZER
SYNCHRO (C)
1
SYNCHRO (L)
1
DATA RECORDER
FIRST OFFICERPOSITIONINDICATOR (R)
NOT USEDCAPTAINPOSITIONINDICATOR (L)AND FLIGHT
G62741CP
g62741cp B767 − Electrical / Instrument Book 11 − Page 109HORIZONTAL STABILIZER TRIM SYSTEM

Auto Trim
During auto trim operation, the controlling FCC controls one SAM.The left and right FCC’s control the left and right SAM’srespectively while the centre FCC controls whichever SAM isinitialized. The controlling FCC commands its SAM to power thesolenoid valves of its STCM. The stabilizer moves at half rate.
In single autotrim operation (one FCC engaged), a manual electrictrim input by the pilot causes the FCC to disengage and allows themanual electric trim signals to command the stabilizer to move atfull rate.
In multiple autotrim operation (two or three FCC’s engaged), thecontrolling FCC ignores a manual electric trim input by the pilotsand maintains control.
Mach Trim
During flight with flaps and slats retracted, with no other trimcommand no FCC the mach trim circuit of the controlling SAMcommands the stabilizer movement at half rate of speed as a functionof a change of mach number. This enhances the longitudinal stabilityof the airplane during speed changes.
Position Indication
Each synchro in the left and right limit switch and positiontransmitter modules drives a black/white tape on the positionindicators on either sides of the P10 control stand, The indicatorscale is graduated in units of stabilizer movement. A green bandindicates the correct range of stabilizer position during takeoff.
Fault Annunciation
Both SAM’s annunciate faults by setting fault balls on the face plateof the modules and initiating a maintenance (M) level messageSTAB TRIM on EICAS.
During uncommanded movement of the stabilizer, or movement inthe direction opposite to the one commanded, the caution (B) levelmessage UNSCHD STAB TRIM appears on EICAS and theUNSCHED STAB TRIM amber light illuminates on the P5 panel.
If the stabilizer moves at half rate of speed during a manual electrictrim command, the advisory (C) level message STAB TRIM appearson EICAS and the STAB TRIM amber light illuminates on the P5panel.
27.41 − HORIZONTAL STABILIZER − SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 110
M00087D0.PST
HORIZONTAL STABILIZER TRIM SYSTEM(Continued)

CONTROLCOLUMN
FIRSTOFFICER’S
CONTROLCOLUMN
CAPTAIN’S
LOG
IC C
RO
SS
FE
ED
FIRSTOFFICER
TRIMSWITCH
1
TDA
TUATDC
BRAKE RELEASETUC
BRAKE RELEASE
TUCTDCTUA
TDA
4
UNSCHED
86
5
AIR/GNDLOGIC
4 7
ELECTRICAL
MECHANICAL
DATA BUS
HYDRAULIC
LIMIT SWITCH AND POSITION XMTR MODULES1
SAM L
SAM R
MACHTRIM
MACHTRIM
TRIMSWITCH
CAPTAIN
6
(L)FCC
ADC(R)
ADC(L)
FCC(C)
2
3
(R)FCC
HYD SYSC
PRESS
TDC
ADC
TUATDATUC
EICAS
FCC
SAM
RVDT
FSPM
- TRIM DOWN CONTROL
SYSTEM AND CREW ALERTING
- AIR DATA COMPUTER
- TRIM UP ARM- TRIM DOWN ARM- TRIM UP CONTROL
- ENGINE INDICATING
COMPUTER- FLIGHT CONTROL
LOCKOUT MODULE- STABILIZER TRIM AND AILERON
TRANSDUCER- ROTARY VARIABLE DISPLACEMENT
- FLAP/STAB POSITION MODULE
LOGICAIR/GND L HYD SYS
PRESSURE
2 3 4
SYNCHRO (R)
1
EICAS
(2)COMP
TRIM LTSTAB
STAB LT
1
HYDRAULICCUTOUT SWITCHES
SELECT RELAYTRIM LIMIT
SELECT RELAYTRIM LIMIT
FLAPS RETRACTEDFLAPS NOT RETRACTED
4
2
DOWNLIMIT
1
TRIMDOWNLIMIT
TRIM
1
FLAPS RETRACTEDFLAPS NOT RETRACTED
TRIM UP LIMIT
TRIM UP LIMIT
BRAKE
MOTOR
STABILIZERTRIM BALLSCREW
ASSEMBLY
MOTOR
BRAKE
NOSE UP
NOSE UP
PRESSURE
NOSE DWN
NOSE DWN
ARM
STABILIZERTRIMCONTROL
CONTROL
ARM
STABILIZERTRIMCONTROL
CONTROL
MODULE (L)
MODULE (R)
SOV
SOV
11RVDT
(L)
(L)
RVDT(C)
(C)
RVDT(R)
(R)
1
ELEVATOR
HYDRAULIC
FEEL PRESSURE (L)
SYSTEM (L)
PRESSUREBRAKE RELEASE
FSPM FSPMFSPM
HYDRAULIC
ELEVATOR FEELSYSTEM (C)
PRESSURE (C)
SWITCHES
CONTUP
DNUP
ARM
DN
ELECTRICALTERNATE
2
8
75
BRAKE RELEASE
SOV - SHUTOFF VALVE
STABILIZER
SYNCHRO (C)
1
SYNCHRO (L)
1
DATA RECORDER
FIRST OFFICERPOSITIONINDICATOR (R)
NOT USEDCAPTAINPOSITIONINDICATOR (L)AND FLIGHT
G62741CP
g62741cp B767 − Electrical / Instrument Book 11 − Page 111HORIZONTAL STABILIZER TRIM SYSTEM
(Continued)

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age112
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATORS
Table of Contents
Subchapter Page
INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115ELEVATOR SYSTEM COMPONENTS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127ELEVATOR FEEL SYSTEM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135ELEVATOR NEUTRAL SHIFT - 200 AIRCRAFT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149ELEVATOR POSITION INDICATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155ELEVATOR SYSTEM SUMMARY. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
B767 − Electrical / Instrument Book 11 − Page 113

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age114
INT
EN
TIO
NA
LLYB
LAN
K

INTRODUCTION
g62741cp B767 − Electrical / Instrument Book 11 − Page 115

General Description
Two Inboard and two outboard elevators are connected by hinges tothe horizontal stabilizer rear spar. The inboard and outboard elevatoron each side are connected together by connecting links and operateas a single unit. The outboard elevator is permanently rigged fairedwith the inboard elevator.
Movement of the elevator provides primary control on the airplanepitch about the lateral axis. The purpose of the elevator is to makeshort term changes in the airplane pitch attitude for climb, descentand altitude hold. Elevator movement initiates long term trim by thehorizontal stabilizer.
Moving the elevator trailing edge up results in an airplane nose-upmovement. Moving the elevator trailing edge down results in anairplane nose-down movement.
27.31 − ELEVATORS − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 116
M0007E1C.PST
ELEVATOR CONTROL SYSTEM - INTRODUCTION

CONTROLPITCH
ELEVATORS
AXISLATERAL
62730AAA
g62730aa B767 − Electrical / Instrument Book 11 − Page 117ELEVATOR CONTROL SYSTEM - INTRODUCTION

General Description
The left and right elevators pivot on hinges attached to the horizontalstabilizer rear spar. Three power control actuators (PCA’s) operateeach elevator.
Control
Pilot control is by moving the control columns. Control cablestransfer the input to elevator aft quadrants which command thePCA’s. The PCA’s are powered by the three hydraulic systems.
In autopilot mode, the operating FCC electrically commands theautopilot servos which input to the elevator quadrants and the PCA’s.
Control column feel is provided by the feel and centering unit. Thefeel at the column is varied as a function of airspeed by the elevatorfeel computer.
A stick nudger, commanded by the stall warning computers, movesthe elevators and the control columns to cause a nose down attitudeof the airplane.
27.31 − ELEVATORS − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 118
M0007E2D.PST
ELEVATOR CONTROL SYSTEM

FEELCOMPUTER
ELEVATOR FEEL AND
CENTERING
UNIT
FLIGHT CONTROL
COMPUTERS
WARNING
COMPUTERS
CONTROL
COLUMNS
AUTOPILOT
STALL
AUTOPILOT
SERVOS
STICK
NUDGER
CONTROL CABLES
ELEVATOR
AFT
QUADRANTS
POWER
CONTROL
ACTUATORS ELEVATORS
CWS T/X1
1 767-200 A/C62730ABA
PITOT- STATICPRESSURE
STABILISERTRIMPOSITION
NEUTRALSHIFT1
OVERRIDEMECHANISM
g62730ab B767 − Electrical / Instrument Book 11 − Page 119ELEVATOR CONTROL SYSTEM

Fault Indication
The only elevator system fault indicated in the flight compartment isa fault of a feel computer output pressure. This fault is indicated byan ELEV FEEL message on the status and maintenance pages ofEICAS.
Elevator Position
Elevator positions are shown on the lower left corner of the EICASstatus page.
27.38 − ELEVATORS − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 120
M00081A9.PST
FLIGHT COMPARTMENT INDICATIONS

ELEV FEEL
EICAS DISPLAY UNIT (P2)
AIL ELEV AIL
RUD
62730ACA
g62730ac B767 − Electrical / Instrument Book 11 − Page 121FLIGHT COMPARTMENT INDICATIONS

General Description
Forward Controls
The two control columns have their torque tubes connected togetherby a control column override mechanism. A stick shaker is installedon each torque tube. The torque tubes output to the tension regulatorquadrants.
Two pairs of cables are connected to the tension regulator quadrants.The left cables (captain’s control column) are routed between thecabin floor beams to the aft fuselage; the right cables (first officer’scontrol column) are routed up in the flight deck bulkhead and then inthe cabin ceiling.
Aft Controls
Aft Quadrants
The left cables are connected to the left aft quadrant (captain’s) andthe right cables to the right aft quadrant (first officer’s). The aftquadrant torque tubes pivot on the airplane structure. They arelocated directly aft of the horizontal stabilizer.
The two aft quadrants are interconnected by a rod and an overridemechanism.
Three autopilot servos are mounted on the aft fuselage structure andinput to the two aft quadrants by connecting rods. Two servos inputto the left aft quadrant and one to the right aft quadrant.
Feel and Centering Unit
A feel and centering unit, pivoted on the aft fuselage structure, isconnected by rods to both aft quadrant torque tubes. The feel andcentering unit contains a dual hydraulic actuator supplied withvariable pressure from the elevator feel computer. A cam rollerspring mechanism and hydraulic pressure provide for centering of theelevator system. A stick nudger is installed on the feel and centeringunit.
Stall Warning
Dual stick shakers provide stall warning. A stick nudger, on the feeland centering unit, provides a forward force to the control columnsfor stall recovery. The shakers and nudger are controlled by two stallwarning computers.
Elevator Feel Computer
A feel computer, installed in the stabilizer compartment, generatesdual hydraulic pressures which vary as a function of airspeed andstabilizer position. This variable hydraulic pressure is supplied to thefeel cylinder of the feel and centering unit and to the stabilizer trimcontrol modules (STCM).
Neutral Shift and Override Mechanism — 200 Aircraft
A neutral shift and override mechanism is installed on the upper aftfuselarge structure. A control rod inputs the horizontal stabilizerposition to the mechanism. The mechanism outputs by a connectingrod to rotate the feel and centering mechanism. The neutral shiftmechanism also contains an override.
27.31 − ELEVATORS − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 122
M0007E42.PST
ELEVATOR CONTROL SCHEMATIC

2
1
1
UNITCENTERING
OVERRIDE MECHANISM
767-300 AIRPLANES2
767-200 AIRPLANES1
RODINTERCONNECTAFT QUADRANT
COLUMNS
OUTBD
FWD
LEFT AFT QUADRANT
CONTROL RODOUTPUT ARM
LEFT AFT QUADRANT
MECHANISMOVERRIDE
RIGHT AFT QUADRANT
AFT QUADRANTS
OUTPUT ARM CONTROL RODRIGHT AFT QUADRANT
(2 PLACES)TRANSMITTERPOSITION
INTERCONNECTSLAVE CABLE
EA0EB0
(3 PLACES)CONTROL SERVOAUTOPILOT PITCH
OVERRIDE MECHANISMNEUTRAL SHIFT AND
FEEL ANDE2A
E2B
CAPTAIN’SCONTROL COLUMN
CONTROL
OVERRIDE MECHANISM
(2 PLACES)STICK SHAKER
(2 PLACES)QUADRANTREGULATORTENSION
CONTROL COLUMNFIRST OFFICER’S
SPAR HINGESSTABILIZER REARCENTER LINE OF
E1B
E1A
STABILIZERHORIZONTAL
COMPUTERFEEL
LEFT INBOARD ELEVATOR(RIGHT SIDE SIMILAR)
(RIGHT SIDE SIMILAR)LEFT OUTBOARD ELEVATOR
(3 PLACES ON EACH OUTBOARD ELEVATOR) POWER CONTROL ACTUATORS (PCA’S)
(2 PLACES)DEVICELOST MOTION
(2 PLACES)QUADRANTSLAVE CABLE
G62730BK
g62730bk B767 − Electrical / Instrument Book 11 − Page 123ELEVATOR CONTROL SCHEMATIC

Override Mechanism — 300 Aircraft
An override mechanism is installed on the upper aft fuselagestructure.
Elevator Controls
The aft quadrants output by connecting rods to all three powercontrol actuators (PCA’s) on each outboard elevator.
Slave Cable Interconnect
The movement of the elevators drives a slave cable interconnectthrough lost motions and overrides.
Position Transmitters
Position transmitters are connected by cranks and linkages to eachinboard elevator to provide elevator position signals to the EICAScomputers.
Operation
The elevator control system consists of two equal systems working inparallel. Normally the two systems work together. Howerver in caseone system is jammed, the left control column operates the leftelevator or the right column the right elevator.
In command (CMD) mode of autopilot, the operating FCCscommand the elevator movement and backdrive the control columns.
Feel force at the control columns are varied by the feel computer asa function of airspeed and stabilizer position.
The override mechanism allows the elevator system to operate incase of a jam in the feel and centering mechanism.
The slave cable interconnect system provides an alternate means ofcontrolling both elevators in the event that the linkage isdisconnected between the aft quadrant torque tube and the PCAs onone elevator.
27.31 − ELEVATORS − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 124
M0007E42.PST
ELEVATOR CONTROL SCHEMATIC(Continued)

2
1
1
UNITCENTERING
OVERRIDE MECHANISM
767-300 AIRPLANES2
767-200 AIRPLANES1
RODINTERCONNECTAFT QUADRANT
COLUMNS
OUTBD
FWD
LEFT AFT QUADRANT
CONTROL RODOUTPUT ARM
LEFT AFT QUADRANT
MECHANISMOVERRIDE
RIGHT AFT QUADRANT
AFT QUADRANTS
OUTPUT ARM CONTROL RODRIGHT AFT QUADRANT
(2 PLACES)TRANSMITTERPOSITION
INTERCONNECTSLAVE CABLE
EA0EB0
(3 PLACES)CONTROL SERVOAUTOPILOT PITCH
OVERRIDE MECHANISMNEUTRAL SHIFT AND
FEEL ANDE2A
E2B
CAPTAIN’SCONTROL COLUMN
CONTROL
OVERRIDE MECHANISM
(2 PLACES)STICK SHAKER
(2 PLACES)QUADRANTREGULATORTENSION
CONTROL COLUMNFIRST OFFICER’S
SPAR HINGESSTABILIZER REARCENTER LINE OF
E1B
E1A
STABILIZERHORIZONTAL
COMPUTERFEEL
LEFT INBOARD ELEVATOR(RIGHT SIDE SIMILAR)
(RIGHT SIDE SIMILAR)LEFT OUTBOARD ELEVATOR
(3 PLACES ON EACH OUTBOARD ELEVATOR) POWER CONTROL ACTUATORS (PCA’S)
(2 PLACES)DEVICELOST MOTION
(2 PLACES)QUADRANTSLAVE CABLE
G62730BK
g62730bk B767 − Electrical / Instrument Book 11 − Page 125ELEVATOR CONTROL SCHEMATIC
(Continued)

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age126
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATOR SYSTEM COMPONENTS
g62730bk B767 − Electrical / Instrument Book 11 − Page 127

Torque Tubes and Tension Regulator QuadrantDetails
The two control columns are mounted on torque tubes which pivoton the airplane structure. The two torque tubes are interconnected byan override mechanism.
A stick shaker is mounted on each torque tube. The stick shakers arecontrolled by the stall warning computers.
The movement of each torque tube is transmitted by a crankconnected to the tension regulator quadrant by a connecting rod.
27.31 − ELEVATORS − ELEVATOR SYSTEM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 128
M0007E8F.PST
CONTROL COLUMN ASSEMBLY

CRANKOUTPUT
PIVOTCOLUMNCOMPRESSION
SPRINGS (2)
TYPICAL COLUMN - SIDE VIEW___________________________
TENSION SCALE
TENSIONREGULATOR (2)
TORQUE TUBEFIRST OFFICER’S
SHAKERSTICK
BOTTOM)
RIG PIN NO. 1(INSERTED FROM
HINGE
CAPT’SCONTROLCOLUMN
CAPTAIN’STORQUE TUBE
CONTROLCOLUMN
F/O’S
FLIGHT COMPARTMENTFLOOR LINE (REF)
RIG PINNO. 2
COLUMNPIVOT
COLUMN OVERRIDESPRINGS (25 LB/CW)
(FIRST OFFICER’SCOLUMN)
COLUMN OVERRIDE__________________(CAPT’S COLUMN)ROLLER
CAM
FWD FWD
62730BCA
g62730bc B767 − Electrical / Instrument Book 11 − Page 129CONTROL COLUMN ASSEMBLY

Elevator Aft Quadrants
The elevator cables are connected to two elevator aft quadrantslocated directly aft of the horizontal stabilizer. Access to the aftquadrant components is by opening the service access door aft of thehorizontal stabilizer compartment.
CAUTION
Do not stand on the service access door as it couldrelease from the weight applied.
The aft quadrants are supported by offset pivot bearings at the topand bottom of the quadrants. The aft quadrants are mounted on twooffset torque tubes which pivot on airplane structure. The two torquetubes are interconnected by a connecting rod with an overridemechanism. Two torque tubes are connected to a feel and centeringunit. The torque tubes output to the power control actuators (PCAs)by cranks and rods.
Autopilot Servos
Three autopilot servos input to the torque tubes by connecting rods.
Maintenance Practices
There are two upper extensions on the torque tubes with rig pinholes in them that align with rig pin holes in aicraft structure whenelevators are in the neutral positon.
Feel and Centering Unit
The feel unit is mounted on the aft side of the bulkhead aft of thestabilizer. The feel unit transmits hydraulic and mechanical feelforces through cranks and adjustable pushrods to the elevator aftquadrants. The feel unit is supported by a single pivot on thebulkhead, and is restrained from rotation by the pushrod attached tothe neutral shift and override mechanism (-200 aircraft) or overridemechanism (-300 aircraft). Access to the feel unit is through thelower service door aft of the horizontal stabilizer.
Elevator Feel Computer
The elevator feel computer meters the variable hydraulic feelpressure as a function of airspeed and stabilizer position.
Stick Nudger
A stick nudger, installed on the feel and centering mechanism,provides an airplane nose-down command to the elevator when thestall warning computers signal the approach of a stall.
27.31 − ELEVATORS − ELEVATOR SYSTEM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 130
M0007ED5.PST
ELEVATOR AFT QUADRANT COMPONENTS

SEE A
NEUTRAL SHIFT AND
OVERRIDE MECHANISM
UPPER FEEL UNIT ARM(LOWER FEEL UNIT ARMIDENTICAL, NOT SHOWN)
LEFT AFTQUADRANT
ACTUATOR
RIGHT AFTQUADRANT
RIGHT AFT QUADRANTOUTPUT ARM CONTROL ROD
AUTOPILOT SERVOACTUATOR
ACTUATOR
AFT QUADRANT
A
HYDRAULIC
1
AUTOPILOTSERVO
AUTOPILOTSERVO
1
2
1
2
767-200 AIRPLANES
767-300 AIRPLANES
FEEL UNIT
FEEL ACTUATOR
STICK NUDGER
INTERCONNECT ROD
CONTROL RODS
LINES TO FEELCOMPUTER
AFT QUADRANTMASS BALANCE 2
LEFT AFT QUADRANT OUTPUT ARMCONTROL ROD
AFT QUADRANTMASS BALANCE
2
G62731AA
g62731aa B767 − Electrical / Instrument Book 11 − Page 131ELEVATOR AFT QUADRANT COMPONENTS

Autopilot and Control Wheel Steering
Autopilot servo actuators are engaged when pilot selects eitherautopilot command mode or Control Wheel Steering (CWS) mode.
Autopilot servos input elevator commands to control pitch attitude inresponse to commands from autopilot computer.
CWS is not applicable in command mode.
In commands mode, autopilot servo actuators can be overridden bypilots manually with (Fs) = 20 pounds per autopilot servo actuatorengaged.
CWS mode is selected by the pilot.
In CWS mode, force on the control column generates electricalsignals in force transducers.
Autopilot responds to force transducer signals when force on controlcolumn is 4 pounds or greater.
In CWS mode, autopilot will hold any altitude established by pilotsthrough control column deflection and force transducer signals,within limits of plus or minus 20° pitch.
NOTE: Autopilot backdrives the control column.
Camout
If the autopilot LVDT to the output LVDT do not agree whenautopilot is engaged, the FCC will recognise a CAMOUT.
This condition can occur due to:
• Overriding manual (30lbs force/channel).• Other overriding autopilot forces when in multi-channel operation.• Mechanical jamming of output links.
Servo Engage
When the autopilot is engaged the Flight Control Computer (FCC)sends an elevator hydraulic arm discrete (dc) to servo valve #1(SV1).
The FCC send commands to the EHSV to synchronise the actuatorpiston (autopilot LVDT) with the output crank (output LVDT).
When synchronised (engage requirements met) the FCC provides adiscrete (dc) to engage the detent pistons. Solenoid valve #2 (SV2).
The detent pistons clamp the internal crank to the actuator piston.
Autopilot command to EHSV for elevator movement.
27.31 − ELEVATORS − ELEVATOR SYSTEM COMPONENTS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 132
M0007EFB.PST
ELEVATOR AUTOPILOT SERVO ACTUATOR

AUTOPILOT LVDT
TO ELEVATOR POWERCONTROL ACTUATORS
C1C2
OUTPUT LVDT
RP
RELIEF
CONNECTORELECTRICAL
RCP (SV1)
SOLENOID
ORIFICE
ACTUATORPISTON
ACTUATOR PISTONCENTERING SPRING
FILTER
INTERNAL
R P
PORTPRESSUREHYDRAULIC
OUTPUT CRANK
PISTONDETENT
SPRINGSDISENGAGE
CRP
PRC
DETENT
SERVO VALVE (EHSV)ELECTRO-HYDRAULIC
CRANKROLLER
RETURN PORTHYDRAULIC
PRESSUREREGULATOR
VALVE
PISTON
VALVE NO. 1
SOLENOID
(SV2)VALVE NO. 2
62212AOA
SERVO VALVE (EHSV)AUTOPILOT LVDT
CONTROL LINKAGE
POWER OUTPUT
OUTPUT LVDT
ELECTRO-HYDRAULIC
TO ELEVATOR
SOLENOID VALVE 1
SOLENOID VALVE 2
CONNECTORELECTRICAL
COVERFILTER
.
g62212ao B767 − Electrical / Instrument Book 11 − Page 133ELEVATOR AUTOPILOT SERVO ACTUATOR

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age134
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATOR FEEL SYSTEM
g62212ao B767 − Electrical / Instrument Book 11 − Page 135

General Description
The feel and centering unit is mounted on a pivot support attached tothe aft bulkhead of the stabilizer compartment. The feel andcentering unit is connected to the two aft quadrant torque tubes byconnecting rods. The feel and centering unit consists of linkages,springs, a hydraulic feel actuator, a cam, roller and spring to providecolumn feel forces and system centering.
The connecting rod from the right aft quadrant torque tube (firstofficer’s) connects to a input crank on the lower side of the feel andcentering unit; the rod from the left torque tube (captain’s) connectsto the input crank on the upper side of the unit.
The feel and centering units are connected to the override mechanismby a rod.
Mechanical Feel and Centering
Centering is by a cam-roller type mechanism. The Cam is on thelower input crank, and the roller is supported by an arm pivoted onthe feel and centering unit and held on the cam by a feel spring.Anytime the right aft quadrant rotates, the lower input crankmovement forces the roller out of the cam detent against the spring.This results in a column mechanical feel force which varies fromapproximately 5 lb at breakout to 22 lb at maximum columnmovement. The spring returns the elevator system to its neutralposition when the input command is removed.
Hydraulic Feel
Movements of the upper and lower input cranks are transmitted byties and links to levers connected to the feel actuator. Any inputcommand to the elevator system by the columns or autopilot servosresults in both levers pulling on the actuator rod ends.
The feel actuator consists of two hydraulic cylinders connected endto end. The actuator body is free floating and is supported by thepiston rods attached to the levers. Hydraulic pressure in the feelactuator provides the column feel force. A bias spring offsets 17percent of the hydraulic feel force at low airspeed (take off).
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 136
M0007F2B.PST
FEEL AND CENTERING UNIT

FWD
CONTROLSACCESS DOOR
LINK (2)TIE (4)
ASSEMBLY (2)OUTPUT SHAFT
BOTTOM VIEW
MECHANICAL
UP
FWD
BIAS SPRING
FEEL ACTUATOR
SPRINGFEEL
CAM FOLLOWER
STOP (2)CAM
LOWERINPUTCRANK
ACTUATORFEEL
UP
AFT QUADRANTTORQUE TUBES
PIVOTSUPPORT
LOWERINPUT CRANK
UPPERINPUTCRANK
LEVER (2)
UNIT
FEEL ANDCENTERING
OVERRIDEMECHANISM
_____________
_________TOP VIEW
62730AHA
STICKNUDGER
g62730ah B767 − Electrical / Instrument Book 11 − Page 137FEEL AND CENTERING UNIT

General Description
The stick nudger consists of an electric actuator, crank assembly andspring mounted on the upper face of the feel and centering unit. Theelectric actuator is pivot mounted on the feel unit and rotates a crankassembly which then pulls on the stick nudger spring. The spring isattached to the upper (captain) input crank of the feel unit.
The stick nudger actuator consists of a 28 volts dc electric motorwhich extends and retracts a rod. Switches internal to the actuatorcutout electric power at the end of the stroke.
Operation
During normal operation, the nudger actuator is retracted. The centreline of the crank assembly left end coincides with the pivot of theupper input crank. Elevator command inputs are not affected by thestick nudger.
During flight with flaps and slats retracted, a stall warning from bothstall warning computers results in commanding the actuator toextend. As the actuator extends, the rotation of the crank assemblypulls on the nudger spring and rotates the upper input crank. If thepilot does not restrain the movement of the column, the stick nudgerapplies an airplane nose-down command to the elevator. If the pilotrestrains the movement of the column, the stick nudger spring isstretched further as the nudger actuator extends.
When the stall warning stops, the nudger actuator is commanded toretract and repositions the crank assembly.
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 138
M0007FF1.PST
STICK NUDGER

INPUT CRANKUPPER
INPUT CRANKUPPER
ACTUATORSTICK NUDGER
ASSEMBLYCRANK
SPRINGSTICK NUDGER
ACTUATORSTICK NUDGER
SPRINGSTICK NUDGER
ASSEMBLYCRANK
UNITCENTERINGFEEL AND
62730ARA
PIVOT POINTS ALIGNED
ACTUATOR RETRACTED
PIVOT POINTSNOT ALIGNED
ACTUATOR EXTENDED
NOSE DOWN INPUT
g62730ar B767 − Electrical / Instrument Book 11 − Page 139STICK NUDGER

General Description
The elevator feel computer generates two variable hydraulicpressures based on pitot pressure and horizontal stabilizer position.The variable pressures provide feel forces at the elevator columnsand operate the rate control valve of the stabilizer trim controlmodules (STCM).
The two halves of the feel unit use left and centre hydraulicsrespectfully and act as redundant pairs.
The elevator feel computer is located on the left side of the stabilizercompartment accessed by opening the service access door.
Operation
The elevator feel computer is a dual hydro-pneumatic unit whichreceives airspeed signal from two pitot pressure lines. The stabilizerposition is transmitted to the feel computer by a rod connected to thestabilizer.
Hydraulic feel pressure increases with an increase in airspeed andnose down trim. At the feel unit, the pilot feels the effect of thehigher pressure only. The feel force is unaffected if one computer isinoperative.
A bias spring biases the stabilizer input crank towards the airplanenose-down position. If the stabilizer input rod fails, the feel pressurescan then vary to the full range of pitot pressure changes.
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 140
M0007F70.PST
ELEVATOR FEEL COMPUTER

INBD
ELEVATORFEELCOMPUTER
SERVICE
BIAS
RIG PIN
SPRINGBIAS
ACCESS DOOR
FWD
LINES(2)PRESSUREPITOT
STABILIZER
PRESSURE LINESHYDRAULIC FEEL
RODINPUTTRIMSTABILIZER
NO. 11HOLE
G62730AKFWD
UP
DIMENSION ’A’
.
g62730ak B767 − Electrical / Instrument Book 11 − Page 141ELEVATOR FEEL COMPUTER

Location
The photograph shows the feel computer mounted on the aft face ofthe aft stabilizer bulkhead.
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 142
M0007F91.PST
ELEVATOR FEEL COMPUTER - (PHOTOGRAPH)

g62730al B767 − Electrical / Instrument Book 11 − Page 143ELEVATOR FEEL COMPUTER - (PHOTOGRAPH)

Elevator Feel Computer
The dual hydro-pneumatic unit comprises two identical sections. Onereceives left hydraulic system pressure while the other receivescentre hydraulic system pressure.
The computer is a dual system to provide redundant feel pressures tothe feel unit. The system limits the autopilot authority.
Operation
A metering valve in each computer half meters hydraulic systempressure as a function of airspeed. Pitot dynamic (Q) pressure movesa bellows and forces the metering valve to move against a preloadedspring. The output feel pressure is ported to a feedback chamber, atthe other end of the metering valve, to balance the bellows inputforce. The output feel pressures are sent to the feel actuator on thefeel and centering unit and to the rate control valves on the twostabilizer trim control modules (STCM).
Pitot pressure on the computer bellows opposes static air pressure onthe opposite side. The difference pressure is applied to the meteringvalve. Auxiliary pitot 1 and 2 is used for all Aircraft. B767–200Aircraft use local static and B767–300 Aircraft use auxiliary static 1and 2.
When airspeed changes, the changing bellows input force results in acorresponding change in the output feel pressures to the feel actuatorof the feel and centering unit. When an elevator input command ismade, the pistons of the feel actuator move outwards. The hydraulic
feedback pressure increases causing the feel computer meteringvalves to move and allow displaced fluid into the hydraulic returnline while maintaining the feel pressure constant.
The force required to allow the hydraulic fluid to flow back throughthe feel computer determines the hydraulic feel force.
Components
• Cam: A cam positioned by the horizontal stabilizer movementcompresses a spring which limits the movement of the bellowsand the metering valve. As the stabilizer moves to trim theairplane nose-up, maximum output feel pressures are graduallylimited to a lower value.
• Relief valve: A relief valve is provided in each half of the feelcomputer to limit feel pressures to 160 percent of normal outputpressures.
• Check valve: A check valve in the return lines prevents systemreturn line pressure fluctuations from affecting the feel pressure.
• A pressure relief valve: A pressure relief valve in the return linefrom each computer half maintains 40 to 60 psi in the return linesto prevent an erroneously high feel pressure in the event of theloss of pneumatic pressurization of the left or center resevoir.
• Differential pressure switches: The output pressure from eachcomputer half is monitored by two differential pressure switches.When one output feel pressure differs from the other by 25percent or more for more than 30 seconds with both hydraulicsystems pressurised, the ELEV FEEL message appears on thestatus and maintenance pages of EICAS. This message is latchedin the air mode in the EICAS memory.The airplane cannot bedispatched with the ELEV FEEL status and maintenance messageappearing on EICAS.With both hydraulic systems pressurised,closing the tail flight control shut off valve on the left or centresystem triggers the annunciation after 30 seconds.
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 144
M0007F9E.PST
ELEVATOR FEEL FORCE SYSTEM

M950 ELEVATOR FEEL COMPUTER
LINKSTIES &
SPRINGCENTERING
SPRINGBIAS
METERING VALVE
NOSE UP
RELIEFVALVE
CONNECTIONS TO STABILIZER TRIMCONTROL MODULE (STCM)
LEGEND
PRESSUREMETERED
PRESSURE
RETURN
HYD DISTR CTRFLIGHT CONTROLS
INBD
UP
FWD
STABILIZER
PITOT PRESS.FEEL COMPUTERM950 ELEVATOR
SOURCESTATIC
PITOT SYSTEMPITOT SYSTEM
PRESS DIFF
PRESS DIFF
PRESS. 30 SEC TDL, C, HYD SYS
PRESS. 30 SEC TDL, C, HYD SYS
(E8)
L EICAS COMPUTER
2
5
4
(STATUS ANDMAINTENANCE PAGES)
EICAS DISPLAY (P2)
R EICAS COMPUTER
ACTUATORFEEL
INPUTF/O
INPUTCAPT
ELEV FEEL & CENTERING UNIT(AFT QUANDRANT)
NC
B
21
B
2
1
3
1D432
S1
NOSE UPAPLAPL
S2
A
2
1
STATIC
BELLOWS BELLOWS
CONNECTIONS ON THIS SCHEMATIC
A
HYD DISTR LFLIGHT CONTROLS
(E8)
SOURCE
RELIEFVALVE
ELEV FEEL
RUD
AILELEVAIL
G62730AM
(FWD STABILIZER COMPARTMENT)
(FWD STABILIZER COMPARTMENT)
.
STOPARM
INPUT SPRINGARM
RETURN LINERELIEF VALVE40 TO 60 PSI
g62730am B767 − Electrical / Instrument Book 11 − Page 145ELEVATOR FEEL FORCE SYSTEM

Components (Continued)• Feel pressures: The output feel pressures can vary from 175 psi to
1150 psi above return line pressure at airspeeds from 0 to about350 knots with the horizontal stabilizer in the neutral position.
Elevator Feel and Centering Unit
The column feel forces are the total of the forces generated by thecentering spring and the hydraulic feel actuator of the feel andcentering unit. Because of the geometry of the links and ties of thefeel and centering unit, the hydraulic feel force is always zero withthe column at neutral.
The centering spring provides a mechanical feel force at the columnof 5 lb at breakout to 22 lb at maximum column movement.
The feel actuator provides a hydraulic feel force at the column ofabout 20 lb at take off speed (about 140 knots) to about 80 lb at 350knots.
Because of the bias spring in the feel and centering unit, the columnfeel force at low airspeed is almost entirely due to the centeringspring.
If there is a difference between the two output feel pressures, theactuator casing translates towards the high pressure side until thepiston on the low pressure side bottoms out. The higher the of thetwo output feel pressures develops the hydraulic feel force at thecolumn. Loss of one hydraulic system has no effect on the feel force.(redundant halves)
27.31 − ELEVATORS − ELEVATOR FEEL SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 146
M0007F9E.PST
ELEVATOR FEEL FORCE SYSTEM(Continued)

M950 ELEVATOR FEEL COMPUTER
LINKSTIES &
SPRINGCENTERING
SPRINGBIAS
METERING VALVE
NOSE UP
RELIEFVALVE
CONNECTIONS TO STABILIZER TRIMCONTROL MODULE (STCM)
LEGEND
PRESSUREMETERED
PRESSURE
RETURN
HYD DISTR CTRFLIGHT CONTROLS
INBD
UP
FWD
STABILIZER
PITOT PRESS.FEEL COMPUTERM950 ELEVATOR
SOURCESTATIC
PITOT SYSTEMPITOT SYSTEM
PRESS DIFF
PRESS DIFF
PRESS. 30 SEC TDL, C, HYD SYS
PRESS. 30 SEC TDL, C, HYD SYS
(E8)
L EICAS COMPUTER
2
5
4
(STATUS ANDMAINTENANCE PAGES)
EICAS DISPLAY (P2)
R EICAS COMPUTER
ACTUATORFEEL
INPUTF/O
INPUTCAPT
ELEV FEEL & CENTERING UNIT(AFT QUANDRANT)
NC
B
21
B
2
1
3
1D432
S1
NOSE UPAPLAPL
S2
A
2
1
STATIC
BELLOWS BELLOWS
CONNECTIONS ON THIS SCHEMATIC
A
HYD DISTR LFLIGHT CONTROLS
(E8)
SOURCE
RELIEFVALVE
ELEV FEEL
RUD
AILELEVAIL
G62730AM
(FWD STABILIZER COMPARTMENT)
(FWD STABILIZER COMPARTMENT)
.
STOPARM
INPUT SPRINGARM
RETURN LINERELIEF VALVE40 TO 60 PSI
g62730am B767 − Electrical / Instrument Book 11 − Page 147ELEVATOR FEEL FORCE SYSTEM
(Continued)

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age148
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATOR NEUTRAL SHIFT - 200 AIRCRAFT
g62730am B767 − Electrical / Instrument Book 11 − Page 149

General Description
The neutral shift linkage senses the position of the horizontalstabilizer and inputs a command to the elevator system to move theelevator up when the stabilizer reaches high values of airplanenose-up trim. A linkage is located on the forward face of the aftbulkhead of the stabilizer compartment.
Operation
The neutral shift linkage comprises a spring carrier assembly pivotedon a bracket of the stabilizer compartment structure. The movementof the carrier assembly is inhibited by grounding springs and agrounding stop when the stabiliser position is between 0 and 8.5units. A crank assembly pivoted on the carrier assembly is connectedto the horizontal stabilizer by a link. When the stabilizer positionreaches 8.5 to 14.8 Units, the crank assembly contacts the tube stopand forces the carrier assembly to rotate. This rotation is thentransmitted by the cam lever assembly and the connecting rod torotate the feel and centering unit.
Override Mechanism
The neutral shift linkage also includes an override mechanism. Theoverride cam is part of the cam lever assembly. The roller ismounted on the follower arm assembly pivoted on the spring carrierassembly. Three springs keep the roller on the cam surface.
27.31 − ELEVATORS − ELEVATOR NEUTRAL SHIFT - 200 AIRCRAFT B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 150
M0007FD0.PST
NEUTRAL SHIFT LINKAGE

FWD
CONTROLSACCESS DOOR
ACTUATORFEEL
UP
AFT QUADRANTTORQUE TUBES
OVERRIDEMECHANISM
FOLLOWER ARM ASSY
ROLLER
CAM LEVER ASSY
SPRING CARRIERASSY G62730BH
.
NEUTRAL SHIFT OVERRIDE SPRINGS (3)
FS = 80 LBS
NEUTRAL SHIFT GROUNDING
SPRINGS (2) F S = 160 LBS
STABILIZER PUSHROD
TUBE STOP
CRANK ASSY
CAM
HORIZONTALSTABILIZER
GROUND STOP
(CONTACTED AT 8.4 UNITS)
g62730bh B767 − Electrical / Instrument Book 11 − Page 151NEUTRAL SHIFT LINKAGE

Operation
• When the stabilizer position is between 0 and 8.5 units of trim,the neutral shift linkage has no input to the elevator. The neutralpoint of the elevator is faired to the horizontal stabilizer.
• At 8.5 units the column aft cutout switches are swapped to the3.0° to 3.5° switches.
• When the stabilizer position is between 8.5 and 14.8 units of trim,the neutral shift linkage rotates the feel and centering unitresulting in an input command to move the elevator up. Startingwith the faired position at 8.5 Units, the neutral point of theelevator moves up gradually to a maximum of 5.7° reached at14.8 units of trim.
• If there is a jam in the feel and centering unit, the pilot cancontrol the elevator with a break-out at the override mechanism,with a force of 80lb at the control column.
27.31 − ELEVATORS − ELEVATOR NEUTRAL SHIFT - 200 AIRCRAFT B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 152
M0007FDB.PST
ELEVATOR NEUTRAL SHIFT

>2.2 TO 2.7COLUMN FWD
COLUMNCONTROLCAPTAIN’S
COLUMNCONTROLF/O
COLUMN AFT >3.0 TO 3.5
TRANSMITTERAND POSITION
MODULE (3)
LIMIT SWITCH
FWD
FWD
COLUMN AFT >2.0 TO 2.5
INBD
+2 0 -2 -4 -6 -8 -10 -12
0 2 4 6 8 10 12 14
0
1
2
3
4
5
ELEV TE DOWN
INB
OA
RD
ELE
VA
TO
R P
OS
ITIO
N (
UN
ITS
)
ELEV TE UP
ELEVATOR NEUTRAL SHIFT SCHEDULE
T/O GREEN BAND
ELECTRICAL LIMITS
MECHANICAL LIMITS
8-4
(DEGREES)STAB POSITION(UNITS)
G62730AP
.
g62730ap B767 − Electrical / Instrument Book 11 − Page 153ELEVATOR NEUTRAL SHIFT

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age154
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATOR POSITION INDICATION
g62730ap B767 − Electrical / Instrument Book 11 − Page 155

General Description
The elevator position transmitter is a synchro transmitter. Thetransmitter consists of a stator, rotor, housing assembly, and a shaftassembly.
The left and right transmitters are mounted on the inboard aft face ofthe horizontal stabilizer rear spar near the fuselage, one each side ofthe airplane. The transmitters are mechanically connected to therespective elevator panels via an adjustable control rod. Thetransmitters are powered by seperate 28 volt ac Bus’s, and supply asignal to the EICAS computers, to display the elevator positionpointers on the status page.
Transmitter Failure
If a transmitter fails, its position pointer is not shown on the statuspage. The elevator operation must be visually checked for eachdispatch of the airplane. Full elevator movement on the groundshould move the pointer to or past the up or down mark on the statuspage.
Transmitter Replacement
The replacement procedure of the elevator position transmitters is thesame as the ailerons transmitters. The transmitter is installed with thestabilizer set at 2 units (neutral) and the elevator faired. For fineadjustment, the transmitter is adjusted to obtain a signal of less than50 millivolts by the null adjusting sleeve on the control rod. This isdone using a digital voltmeter and breakout box equipment, and
either an external power supply or the airplane electrical power. Rigpins are installed in the bellcranks of the middle power controlactuators (PCA) and left, right and centre hydraulic systems powered.The transmitter can also be adjusted by centering the pointer on thestatus page.
27.38 − ELEVATORS − ELEVATOR POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 156
M00081B6.PST
ELEVATOR POSITION TRANSMITTER

CONTROL RODTRANSMITTER
(2)TRANSMITTERNC
NC
C4102
C4101
R BUS28V AC
(STATUS PAGE)LOWER EICAS DISPLAY (P2)
R EICAS COMPUTER
L EICAS COMPUTER
CX
CX
M518 R ELEV
P11-1 CRT BRKR PNL ELEV POSN
INBDFWD
STABILIZER
POSN XMTR
POSN XMTR
M517 L ELEV
L BUS28V AC
(E8)
(E8)
ELEVHINGELINE
ELEV POSN IND
RUD
AILELEVAIL
62738AAA
g62738aa B767 − Electrical / Instrument Book 11 − Page 157ELEVATOR POSITION TRANSMITTER

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age158
INT
EN
TIO
NA
LLYB
LAN
K

ELEVATOR SYSTEM SUMMARY
g62738aa B767 − Electrical / Instrument Book 11 − Page 159

General Description
The elevator control system is commanded by fore and aft movementof either control column, autopilot servos and stick nudger.
The system has two redundant paths, one on the left side and one onthe right side of the airplane. Each path commands it’s own elevatorpower control actuators (PCA). The two paths can be separated incase of a jam by overrides at the column torque tubes and at the aftquadrants. Movement of the column is transferred to a cable tensionregulator quadrant.
Cables connect the forward quadrants to the aft quadrants. The aftquadrants are mounted on their own offset torque tubes. These torquetubes are interconnected through an override and an asymmetrylimiter.
Elevator components are as follows:
• A stick shaker is mounted on each torque tube for stall warning.• Three autopilot servos are connected to the torque tubes by
connecting rods.• A feel and centering unit, mounted on the stabilizer compartment
aft bulkhead, provides feel and centering to the elevator system.The feel and centering is by spring and a dual hydraulic actuator.
• The stick nudger, mounted on the feel and centering unit, iscommanded by the stall warning system to move the elevatordown.
• An override, mounted on the stabilizer compartment aft bulkhead,allows the elevator system to operate in case of a jam in the feeland centering unit.
• The feel computer, in the stabilizer compartment, varies the feelactuator hydraulic pressures as a function of airspeed.
• On the –200 aircraft the neutral shift linkage, mounted on thestabilizer compartment aft bulkhead, commands, through the feeland centering unit, the elevator to move up gradually in responseto stabilizer movement. An override on the neutral shift linkageallows the elevator system to operate in case of a jam in the feeland centering unit.
• The three PCA’s on each side are commanded by the inputcontrol rod positioned by the aft quadrant torque tubes. They arepowered by a separate hydraulic system.
• The slave cable interconnect mechanism receives input from theelevator movement through a lost motion device and twooverrides. The mechanism allows the elevator on one side to becommanded by the other in case of a lost connection downstreamof the aft quadrant torque tube.
• Elevator movement is displayed on the EICAS status pageresponding to position transmitter input.
27.31 − ELEVATORS − ELEVATOR SYSTEM SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 160
M000807C.PST
ELEVATOR SCHEMATIC

DIRECTIONAL ARROWS ADJACENT TO LINKAGESAND CABLES INDICATE AIRPLANE NOSE DOWN
1. NOTES:
ADJ
ADJ
ADJ
ADJ
ADJ
ADJ
TORQUE TUBESAFT QUADRANT
MECHFROM OVERRIDE
TS15 L ELEV CONTFORCE XDCR
OVERRIDE MECH
ELEVATORS
E-4
E-3
UNITAND CENTERINGELEVATOR FEEL
ACUATORM1139 LINEAR
OVERRIDE MECHANISM
AUTOPILOT SERVOM273 R ELEVATOR
M952 RIGHT STICK SHAKER
AILERONS
F/O CONTROL WHEEL
CONTROL COLUMN
AILERONS
STICK SHAKERM240 LEFT
SWITCHS (TYP)COLUMN POSITION
TORQUE TUBE
CAPTAIN’S CONTROL WHEEL
FWD
E-1
E1A-1
AUTOPILOT SERVOM271 L ELEVATOR
ACTUATORFEEL
ELEVATORSTO LEFT
TO RIGHT
AUTOPILOT SERVOM272 C ELEVATOR
ASSEMBLYCONTROL COLUMN
STA 1005
STA 687
E-2
E1B-1
UP
TYPICAL RIG PIN LOCATION
OUTBD
E-X
STA 1757
E2A-3
E2B-3
STA 1777
STA 980
STA 709
E1A-2 STA 1767
E1A-3
E1B-3STA 1780
E1B-2
CONT FORCE XDCRTS14 R ELEV
QUADRANT (2 PLS)REGULATORCABLE TENSION
COLUMNCAPTAIN’S CONTROL
COLUMNF/O CONTROL
62730AZA
g62730ba B767 − Electrical / Instrument Book 11 − Page 161ELEVATOR SCHEMATIC

27.31 − ELEVATORS − ELEVATOR SYSTEM SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 162
M000807C.PST
ELEVATOR SCHEMATIC(Continued)

INTERCONNECT LINK
RIGHT ELEVATORS SHOWN,
(POGO)OVERRIDEPCA INPUT
ADJ
ADJ
ADJ
ADJ
605-M24550
R P
STABILIZERHORIZONTALREAR SPAR
R P
QUADRANTMECHANISMSLAVETO L ELEV
EB0-1
EA0-1
RBL 24BL 0
EB0-2
EA0-2
BUT OPPOSITE.LEFT ELEVATORS SIMILAR,
FWD
OUTBD
OUTBD ELEVATOR
CONT ACTRR INBD PWR
CONT ACTR
R CTR PWR
R E-6
L E-5
CONT ACTRR OUTBD PWR
RETURN
PRESSURE
QUADRANTFROM R AFT
ELEVATOR HINGECL
INBD ELEVATOR
BODY CONTOUR
ACTRSCONTPWR
OUTBD& RR CTRTO
R
P
OTHERS SIMILAR.)(R INBD SHOWN,ACTUATORPOWER CONTROL
LINKREACTION
PCA SUMMING ARM
STABILIZERHORIZONTALREAR SPAR
(TYP 6 PLS)
(RIGHT SHOWN, LEFT SIMILAR)
LOST MOTION ASSYSLAVE LINKAGE
TO ELEVATOR
(4 PLS)
UP
OUTBD
ELEVATOR HINGE
ATTACHMENTSTABILIZER
ATTACHMENTELEVATOR
OUTBD
UP
M517 OPPOSITE.M518 SHOWN,
FWD
INBD ELEVATOROUTBD ELEVATOR
R R P R P R PP
ELEVATOR HINGE
OVERTRAVEL LIMITER
L E-7QUADRANTTO SLAVE
FROM PCA
R E-8OVERRIDE
SLAVE CABLESELEVATOR/
E-10 R
LOST MOTION DEVICE
E-9 L
CONTROL INPUT
OUTPUTACTUATOR
QUADRANTFROM R AFT
R INBD PWR CONT ACTR
R OUTBD PWR CONT ACTRL OUTBD PWR CONT ACTRR CTR PWR CONT ACTRL CTR PWR CONT ACTRL INBD PWR CONT ACTR
HYD DISTR (C)FLIGHT CONTROLS
R INBD ACTRSAME ASINTERNALS
HYD DISTR (R)FLIGHT CONTROLS
R INBD ACTRSAME ASINTERNALS
R INBD ACTRSAME ASINTERNALS
HYD DISTR (L)FLIGHT CONTROLS
R INBD ACTRSAME ASINTERNALS
R INBD ACTRSAME ASINTERNALS
DOWN
NULL
UP
62730BAA
g62730ba B767 − Electrical / Instrument Book 11 − Page 163ELEVATOR SCHEMATIC
(Continued)

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age164
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER
Table of Contents
Subchapter Page
INTRODUCTION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167RUDDER FEEL, CENTERING AND TRIM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181RUDDER RATIO CHANGER. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187YAW DAMPING SYSTEM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205RUDDER PANELS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223RUDDER POSITION INDICATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227RUDDER SYSTEM OPERATION SUMMARY. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
B767 − Electrical / Instrument Book 11 − Page 165

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age166
INT
EN
TIO
NA
LLYB
LAN
K

INTRODUCTION
g62730ba B767 − Electrical / Instrument Book 11 − Page 167

General Description
A single rudder on the aft spar of the vertical stabilizer provides yawcontrol about the vertical axis of the airplane. While the verticalstabilizer is the primary source of airplane directional stability, therudder must also provide adequate directional control to coordinateturns, create sideslip, balance unsymmetrical engine thrust and enablelanding during runway crosswind conditions.
High engine thrust capabilities require a large rudder for directionalcontrol during engine failure on takeoff. Due to increased ruddereffectiveness at high speed, rudder authority is reduced as speedincreases to prevent structural damage.
27.21 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 168
M000798B.PST
RUDDER CONTROL SYSTEM

YAW
AXISVERTICAL
VERTICALSTABILIZER
RUDDER
62720AAA
.
g62720aa B767 − Electrical / Instrument Book 11 − Page 169RUDDER CONTROL SYSTEM

System Description
Movement of the rudder pedals is transferred by rods to forwardquadrants connected to a pair of cables. The cables drive the aftquadrant. autopilot servos and a rudder trim actuator also providecontrol inputs to the aft quadrant.
Autopilot servos and a rudder trim actuator also provide controlinputs to the aft quadrant.
Rudder control authority is varied from approximately 26 degrees to2 degrees by the ratio changer mechanism. rudder ratio changermodules (RRCM) control the ratio changer actuator. A summingmechanism combines control inputs from the aft quadrant and theyaw damper servos. The servos are controlled by yaw dampermodules (YDM).
The rudder is moved by three actuators, each powered by a separatehydraulic system. A position transmitter signals rudder position.
27.20 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 170
M000795C.PST
RUDDER SYSTEM BLOCK DIAGRAM

PCA
PCA
PCA
PEDALSCAPT
QUADFWD
PEDALSF/O
POS XMTR
RODSRODS
RODS
SERVOSACTUATOR
QUADAFT
A/P SERVOS
TRIM ACT
YAWSUMMINGMECH
RATIOCHANGERMECH
DAMPERYAW
MODULESCHANGERRATIO
MODULES
RODSRODSCABLES
62720ABA
g62720ab B767 − Electrical / Instrument Book 11 − Page 171RUDDER SYSTEM BLOCK DIAGRAM

Forward Controls
Two sets of interconnected rudder pedals connect to a pair offorward quadrants by control rods. Dual control cables connect theforward quadrants to an aft quadrant assembly in the verticalstabilizer.
Aft Quadrant
In addition to the rudder pedals, the aft quadrant assembly can beoperated by three directional roll out autopilot servos or an electrictrim actuator. The trim actuator inputs through a feel, centering andtrim mechanism mounted on the aft quadrant. The feel, centering andtrim mechanism also provides a feel force to the pedals and centersthe rudder control system when the pedals are released. The trimactuator is controlled by a knob on the control stand. The autopilotservos are controlled by flight control computers (FCC) duringautoland.
Rudder Ratio Changer
Two control rods connect the aft quadrant assembly to the rudderratio changer mechanism. The rudder ratio changer mechanismvaries, as a function of airspeed, the magnitude of the aft quadrantinputs to the yaw damper summing mechanism and the powercontrol actuators (PCA). The ratio changer mechanism is operated byan actuator controlled by either of two rudder ratio changer modules.
Yaw Summing Mechanism
Primary and secondary control rods connect aft quadrant assemblyinputs to the yaw damper summing mechanism. In addition to aftquadrant assembly inputs, the yaw damper summing mechanism alsoreceives inputs from two yaw damper servos.
Temperature Compensating Linkage
A temperature compensating linkage, forward of the verticalstabilizer rear spar, functions to null control inputs from thermalexpansion differences between control rods and fin structure.
The yaw damper summing mechanism sums all these inputs andmoves the PCA’s control rods.
Yaw Damper System
Each yaw damper servo is controlled by a yaw damper module. Theyaw damper system provides autoflight rudder control for turncoordination and dutch roll damping.
Position Transmitter
A position transmitter, near the summing mechanism, provides rudderposition signals to the EICAS computers for display on the statuspage.
27.21 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 172
M00079C3.PST
RUDDER SYSTEM

62720AEA
RUD
AIL ELEV AIL
RUDDER TRIM15 10 5 0 5 10 15
NOSE LEFT NOSE RIGHTUNITS
LEFTWINGDOWN
RIGHTWING
AILERON
NOSELEFT RIGHT
NOSE
DOWN
AIL/RUD CONTROL (P8)
LOWER EICAS DISPLAY (P2)(STATUS PAGE)
CAPTAIN’SRUDDERPEDALS
FCC(3)
PEDALADJUSTMENTCRANKS
FIRST OFFICER’SRUDDER PEDALS
FORWARDQUADRANT
DIRECTIONALROLLOUTAUTOPILOTSERVOS (3)
MAIN EQUIPMENT CENTER
TO NOSEWHEELSTEERING
FWD
A
A
E1
R YDM
E2
L YDM
L RCM
E1
R RCM
E2
FWDASSEMBLYAFT QUADRANT
MECHANISMAND TRIMCENTERINGFEEL
YAW DAMPERSERVOS
ACTUATORRATIO CHANGER
RUDDER RATIO
MECHANISMCHANGER
CONTROL RODSECONDARY
PRIMARYCONTROL ROD
POSITIONTRANSMITTER
RUDDER
TRIM ACTUATOR
TEMPERATURECOMPENSATIONLINKAGE
YAW DAMPER
MECHANISMSUMMING
LOWER RUDDER PCAR HYD SYS
MIDDLE RUDDER PCAL HYD SYS
UPPER RUDDER PCAC HYD SYS
R
U
DE
R
D
g62720ae B767 − Electrical / Instrument Book 11 − Page 173RUDDER SYSTEM

Power Control Actuators
Primary and secondary control rods connect the summing mechanismto three PCA’s each powered by a different hydraulic system.
27.21 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 174
M00079C3.PST
RUDDER SYSTEM(Continued)

62720AEA
RUD
AIL ELEV AIL
RUDDER TRIM15 10 5 0 5 10 15
NOSE LEFT NOSE RIGHTUNITS
LEFTWINGDOWN
RIGHTWING
AILERON
NOSELEFT RIGHT
NOSE
DOWN
AIL/RUD CONTROL (P8)
LOWER EICAS DISPLAY (P2)(STATUS PAGE)
CAPTAIN’SRUDDERPEDALS
FCC(3)
PEDALADJUSTMENTCRANKS
FIRST OFFICER’SRUDDER PEDALS
FORWARDQUADRANT
DIRECTIONALROLLOUTAUTOPILOTSERVOS (3)
MAIN EQUIPMENT CENTER
TO NOSEWHEELSTEERING
FWD
A
A
E1
R YDM
E2
L YDM
L RCM
E1
R RCM
E2
FWDASSEMBLYAFT QUADRANT
MECHANISMAND TRIMCENTERINGFEEL
YAW DAMPERSERVOS
ACTUATORRATIO CHANGER
RUDDER RATIO
MECHANISMCHANGER
CONTROL RODSECONDARY
PRIMARYCONTROL ROD
POSITIONTRANSMITTER
RUDDER
TRIM ACTUATOR
TEMPERATURECOMPENSATIONLINKAGE
YAW DAMPER
MECHANISMSUMMING
LOWER RUDDER PCAR HYD SYS
MIDDLE RUDDER PCAL HYD SYS
UPPER RUDDER PCAC HYD SYS
R
U
DE
R
D
g62720ae B767 − Electrical / Instrument Book 11 − Page 175RUDDER SYSTEM
(Continued)

Trim Control and Indication
A trim control knob on the control stand operates the electric trimactuator on the aft quadrant assembly. A trim indicator shows thetrim actuator position in units of trim.
Rudder Position Indication
The rudder position is displayed on the EICAS status page.
Yaw Damper Controls
The yaw damper system is controlled by two switches on the P5overhead panel. An ON light shows the switch position. An amberINOP light indicates the yaw damper function is inoperative.
A three position yaw damper test switch on the P61 panel tests bothyaw damper systems.
EICAS Indications
A RUDDER RATIO amber light on the P5 overhead panel indicatesthe loss of rudder ratio changer function.
EICAS caution and maintenance messages indicate various levels ofratio changer and yaw damper faults. Caution messages indicate lossof function. Maintenance messages indicate faults in the associatedsystem.
27.21 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 176
M000799A.PST
FLIGHT COMPARTMENT CONTROLS AND INDICATORS

L R
ON w
INOP
w
INOP a
YAW DAMPER
a
AILERON
LEFTWINGDOWN
RIGHTWINGDOWN
NOSE LEFT NOSE RIGHTUNITS
0510 5 10 1515RUDDER TRIM
OVERHEAD PANEL (P5)
RUDDERRATIO a
ON
FUEL QTY
WINGANTI ICE
AIR DATA COMPTR
CONFIGT/O
INOP
WINDOW/PROBE HEAT
GND PROX
LDGSTALL
YAW DMPRL
R
L
R
R
L
EQUIP COOLFWD
AFT
DUCT LEAK
TEST PANEL MODULE (P61)
NOSERIGHT
NOSELEFT
OVERHEAD PANEL(P5)
AIL/RUD TRIM CONTROL (P8)62720ACA
ECS/MSG
RUD
AIL ELEV AIL
EICAS DISPLAY UNIT (P2)
RUDDER RATIOR YAW DAMPERL YAW DAMPER
YAW DAMPERRUDDER RATIO
STATUS
R
D
ED
U
R
g62720ac B767 − Electrical / Instrument Book 11 − Page 177FLIGHT COMPARTMENT CONTROLS AND INDICATORS

General
Each autopilot rollout servo and PCA is powered by a separatehydraulic system.
The left hydraulic power to the middle PCA is routed through therudder ratio changer actuator. The middle PCA is powered only whenthe ratio changer is operative. The ratio changer actuator is alsopowered by the left hydraulic system.
A flow sensitive fuse (7 gpm) is installed in the left hydraulic systempressure line and a check valve (not shown) is in the left return lineon later and modified aircraft.
The two yaw damper servos are powered by the left and centrehydraulic systems.
Hydraulic pressure to the rudder components can be shut off by flightcontrol shutoff valves controlled by switches on the P61 panel.
27.20 − RUDDER − INTRODUCTION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 178
M000796C.PST
RUDDER HYDRAULIC DISTRIBUTION

G62720AD
SERVOYAW DAMPER
ACTUATORCHANGERRATIO
SERVOYAW DAMPER
RIGHT
SYSTEMHYDRAULIC
CENTER
SYSTEMHYDRAULIC
SYSTEMHYDRAULICLEFT
P61 SIDE PANEL
FUSE
SERVOAUTOPILOT
SERVOAUTOPILOT
SERVOAUTOPILOT
ACTUATORPWR CONTROL
ACTUATORPWR CONTROLMIDDLE
ACTUATORPWR CONTROL
G
N
I
W
L
I
A
T
a
w
OFF
ON
a
w
OFF
ON
L
a
w
OFF
ON
a
w
OFF
ON
R
a
w
OFF
ON
G
N
I
W
L
I
A
T
FLT CONTROL SHUTOFF - GND USE ONLY
a
w
OFF
ON
C
UPPER
LOWER
.
1
1 FITTED TO LATER ANDMODIFIED AIRCRAFT
MECH LINKAGES
g62720ad B767 − Electrical / Instrument Book 11 − Page 179RUDDER HYDRAULIC DISTRIBUTION

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age180
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER FEEL, CENTERING AND TRIM
g62720ad B767 − Electrical / Instrument Book 11 − Page 181

General Description
The functions of the rudder feel, centering and trim mechanism areto provide a mechanical feel force at the rudder pedals, to return therudder control system to a neutral position upon removal of a controlinput and to enable the trim actuator to input to the control system.
The feel, centering and trim mechanism consist of spring and rollerarms that are connected to the trim actuator rod end and to eachother by springs. The spring arm is bearing mounted on a camattached to the offset torque tube of the aft quadrant assembly. Thesprings between the arms hold the roller of the roller arm in the camdetent.
Feel Function
Rotation of the aft quadrant assembly, by rudder pedals or autopilotservo inputs, moves the cam attached to the offset torque tube. Theroller arm, spring loaded on the cam face, cannot rotate with the camas the springs and the roller arms are held by the trim actuator. Camrotation causes the roller to be forced out of the cam detent whichstretches the springs. The cam shape requires a breakout force of 14lb at the rudder pedals increasing to 77 lb at full rudder controlinput.
Centering Function
When the control input is removed, the springs force the roller to rollin the cam detent returning the rudder control system to the trimmedposition.
Trim Function
Extension or retraction of the trim actuator rotates the spring androller arms. The spring force on the roller in the cam detentovercomes the friction force of the rudder control system. The springand roller arms then drive the offset torque tube, the aft quadrantassembly and the rudder control system. The rudder pedals arebackdriven by the rudder trim operation.
27.21 − RUDDER − RUDDER FEEL, CENTERING AND TRIM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 182
M0007A90.PST
RUDDER FEEL, CENTERING AND TRIM MECHANISM

FWD
OFFSETTORQUE TUBE
AFT QUADRANT ASSEMBLYAXIS OF ROTATION
MECHANISMRATIO CHANGEROUTPUT TO
SERVOSAUTO PILOTDIRECTIONALINPUT FROM
ACTUATOR TRIM
ELECTRICALCONNECTOR
TORQUE TUBE
CAM
SPRINGARM
AFT QUANDRANT PIVOT ANDSPRING ARM BEARING
ROLLER
ROLLER ARM
QUADRANT REMOVEDFCT END VIEW WITH
DIRECTIONALAUTOPILOTSERVOS (3) FEEL
CENTERING ANDTRIM MECHANISM
TRIM ACTUATOR
G62721AF
OFFSETTORQUE TUBE
CONTROL RODSTO RATIO CHANGERMECHANISM
ACTUATORTRIM
FWD
.
g62721af B767 − Electrical / Instrument Book 11 − Page 183RUDDER FEEL, CENTERING AND TRIM MECHANISM

Trim Control
The rudder trim knob located on the aft control stand (P8 ), controlspower to the rudder trim actuator. The switch is sping-loaded toreturn to neutral and is powered by the L Bus 28v dc.
Rotating the knob 5 degrees removes a ground from the 15 and 25degree switches. The knob must be rotated more than 25 degrees tocomplete the circuit to the actuator.
The switch has a mechanical stop at the 30° position.
The actuator stroke is controlled by internal limit switches in theactuator motor. The actuator provides a trim authority of 67 percentof full rudder control resulting in 16.8 degrees of rudder movementat low speed. The B767–200 aircraft equipped with enginesdeveloping more than 57,000 lb of thrust, has an actuator providing80 percent rudder trim authority or 21.5 degrees of rudder movementat low speed. The duty cycle of the trim motor is 30 secondsoperation followed by 3 minutes cooling.
Trim Indication
The rudder trim indicator is driven by a rotary variable differentialtransformer (RVDT) in the trim actuator. A pointer shows the ruddertrim position in units. Full rudder trim should be indicated by aminimum of 14 units. An adjusting screw is on the aft side of theaileron/rudder control module to zero the pointer with the rudder
centered ( rudder trailing edge within the index groove ) and the feel,centering and trim mechanism rollers in the cam detent. Loss ofpower to the trim indicator causes the pointer to move off scale. TheRVDT is not line replaceable.
Trim Operation
Operation of the trim actuator backdrives the aft quadrant assemblyand the rudder pedals.
When the landing gear is extended, hydraulic pressure is available tothe nose wheel steering system. Rudder trim operation can then turnthe nose wheels.
27.21 − RUDDER − RUDDER FEEL, CENTERING AND TRIM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 184
M0007ABE.PST
RUDDER TRIM CONTROL AND INDICATION

28V ACL XFR BUS
STBY BUS
ZEROADJUST
28V DC
FWDTRIMACTUATOR
FWD
PANEL 324 BL
RUDDERTRIM
RUDDERTRIM
A
POWER SUPPLY
TAPEDRIVE
POSITION(K17)
CONTROL(K18)
P11 OVHD CB PANEL
M515 RUDDER TRIM ACTR
N83 RUDDER TRIM INDICATOR
A
25L
15L
NOSE LEFT
NOSE RIGHT
5L
5R
15R
25R
RUDDER TRIM SW (S3)
M74 AIL/RUD TRIM CONTROL MODULE (P8)G62721AG
ADJUSTMENTINDICATOR
RIGHT (RET)
LEFT (EXT)
R
U
DE
R
D
ARMING SWITCH
CONTROL SWITCH
.
g62721ag B767 − Electrical / Instrument Book 11 − Page 185RUDDER TRIM CONTROL AND INDICATION

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age186
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER RATIO CHANGER
g62721ag B767 − Electrical / Instrument Book 11 − Page 187

General Description
The purpose of the rudder ratio changer mechanism is to vary therudder authority from commands by the rudder pedals, autopilotservos or rudder trim as a function of airspeed. At low airspeed, themechanism provides high authority to the rudder, at high airspeed,the mechanism provides low authority to the rudder.
The ratio changer mechanism is located on the aft spar of the verticalstabilizer. It is connected to the aft quadrant mechanism and the yawdamper summing mechanism.
The ratio changer mechanism consists of an offset torque tubecontaining two bearing mounted bellcranks. The end of thebellcranks are attached to the primary and secondary control rods.The bellcranks are rotated on the torque tube by the ratio changeractuator. The actuator is connected to the left bellcrank, a bus rodinterconnects the two bellcranks. A cartridge containing two linearvariable differential transformers (LVDT’s) is mounted on the ratiochanger mechanism structure at one end and connected to the rightbellcrank at the other end. A rig pin hole in each bellcrank alignswith a rig pin hole in the torque tube to allow adjustments.
Ratio Changer Operation
When the actuator is retracted, the bellcranks are rotated away fromthe torque tube. Movement of the torque tube by the aft quadrantprovides a maximum input to the primary and secondary controlrods. As the actuator extends, the bellcranks are rotated towards thetorque tube which decreases the movement of the control rods.
If the ratio changer control system fails three springs drive thebellcranks away from the torque tube ensuring full authority of therudder control system.
Adjustment
Adjustment of the ratio changer is carried out in conjunction with theYAW DAMPER mechanism.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 188
M0007AE6.PST
RATIO CHANGER MECHANISM

RATIO CHANGERACTUATOR
LUGACTUATOR
ACTUATORRATIO CHANGER
RETURN SPRINGS(3)
BUS ROD
ADJUSTINGNUT
RIGHTBELLCRANK
LVDT
BELLCRANKLEFT
TUBETORQUEOFFSET
CRANKBEARINGSUPPORT
ACTUATOR EXTENDED (HIGH SPEED)
CONTROL RODSECONDARY
TORQUE TUBE
MECHANISMAFT QUADRANT ACTUATOR RETRACTED (LOW SPEED)
ROTATIONAL AXIS
SECONDARYCONTROL PATH
LOAD LIMITERWITH CRUSH CORE
RUDDER RATIOCHANGER LVDT
PRIMARYCONTROLPATH
TEMPERATURECOMPENSATIONLINKAGE
YAW DAMPERSERVOS (2)
CHANGER MECHANISMRUDDER RATIO
SUMMING MECHANISMYAW DAMPER
(ADJUSTABLE)
PRIMARYCONTROLROD
G62721BF
FWD
CENTERING ANDBIAS SPRING
PCA’S
AFT QUADRANTMECHANISM
.
g62721bf B767 − Electrical / Instrument Book 11 − Page 189RATIO CHANGER MECHANISM

Low Speed Position
When the actuator is retracted the bellcranks are moved away fromthe torque tube. This is the low speed position. In this position theratio changer mechanism can transmit a full input from the aftquadrant mechanism to the primary and secondary control rods.Maximum rudder authority is approximately 26 degrees.
High Speed Position
As the actuator extends, the bellcranks are rotated towards the torquetube decreasing the radius of the primary and secondary control rodsfrom the rotational axis of the torque tube. This reduces the outputfrom the aft quadrant mechanism to the primary and secondarycontrol rods. Maximum rudder authority in the high speed position isapproximately 2 degrees. Authority is reduced incrementally as speedincreases.
Ground Test
A ground test positions the actuator to a 360 knots position forsystem adjustment. In the test position, rig pin 6 can be insertedwhen the ratio changer mechanism is properly rigged. The linearvariable differential transformer (LVDT) is adjusted to position themechanism for rig pin fit.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 190
M0007B1B.PST
RUDDER RATIO CHANGER FUNCTION

Vc KTS
RA
TIO
CH
AR
GE
R E
FF
EC
TIV
E L
EV
ER
AR
M (
IN.)
1.0
2.0
3.0
4.0
200 320 440120
0
ROTATIONAL AXIS
FWD
RIG PIN 6
LVDT
PRIMARYCONTROL ROD
SECONDARYCONTROL ROD
ACTUATOR
TORQUETUBE
CONTROL RODSTO AFT QUADRANTMECHANISM
GROUND TEST/RIGGING POSITION
TORQUETUBE
BELLCRANKPOSITIONS
TOP VIEW OF_____________________________
HIGH SPEEDPOSITION
LOW SPEEDPOSITION
ACTUATOR
2.05
26.5
62721AHA
FWD
g62721ah B767 − Electrical / Instrument Book 11 − Page 191RUDDER RATIO CHANGER FUNCTION

General Description
The ratio changer actuator, on the ratio changer mechanism, consistsof an unbalanced actuator with a solenoid valve, a bypass valve andan electro-hydraulic servo valve (EHSV). The bypass valve, operatedby the solenoid valve, and the EHSV control left hydraulic systempressure to the ratio changer actuator.
Ratio Changer Actuator Operation
When the ratio changer is inoperative, the solenoid valve isde-energized and the bypass valve is spring loaded closed. In theclosed position, the bypass valve shuts off hydraulic pressure to theEHSV and the middle PCA. Left hydraulic system pressure, ifavailable, fully retracts the actuator to the low speed position.
When the ratio changer system is in operation, the solenoid valve isenergized and opens the bypass valve providing pressure to theEHSV and the middle PCA. As airspeed increases, signals are sent tothe EHSV to increase pressure to the extend side of the unbalancedactuator. As the actuator extends, it positions the ratio changermechanism to a high speed position.
Failure Conditions
Actuator faults, or ratio changer system failures causing loss ofcontrol, de-energize the solenoid valve which closes the bypassvalve. Left hydraulic pressure moves the mechanism to the lowspeed position.
Maintenance Practices
The EHSV, solenoid, filter and screen are line replaceable and can beremoved and installed with the actuator installed. The bypass valve isnot line replaceable.
Rig pins 6 and 7 should fit the bellcranks and torque tube, with themechanism positioned by activation of a test switch on one of therudder ration changer modules (RRCM). Adjustment is accomplishedby the nut on the LVDT rod end. With rig pin 6 installed, rig pin 7should also fit, if not, the bus rod must be adjusted.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 192
M0007AFE.PST
RATIO CHANGER ACTUATOR

ACTUATOR
SECONDARY
PRIMARY
PATH
PATH OUTPUT
OUTPUT
BYPASSVALVE
CLEVIS BEARINGMOUNT TO STRUCTURE
EHSV
SOLENOIDVALVE
FROMRUDDERRATIOCHANGERMODULES
FWD
RETURNELECTRO HYDRAULIC SERVOVALVE
M626 RUDDER RATIO CHANGER ACTUATOR
P
P
R
SOLENOID VALVE
LEFT SYSTEMPRESSURE
LEFT SYSTEM PRESSURE
BYPASSVALVE
TO MIDDLE PCASOLENOID VALVE DE-ENERGIZED
ACTUATOR
FILTER
SCREEN
RETURN
PRESSURE
62721BGA
ACTUATOR
ELECTRO HYDRAULIC SERVOVALVE
M626 RUDDER RATIO CHANGER ACTUATOR
P
P
R
SOLENOID VALVE
BYPASSVALVE
SOLENOID VALVE ENERGIZED
.
LOW SPEED MODE
LOW SPEED MODE
ACTUATOR
ELECTRO HYDRAULIC SERVOVALVE
M626 RUDDER RATIO CHANGER ACTUATOR
P
P
R
SOLENOID VALVE
BYPASSVALVE
HIGH SPEED MODE
MOVING TOWARDS HIGH SPEED MODE
g62721bg B767 − Electrical / Instrument Book 11 − Page 193RATIO CHANGER ACTUATOR

General Description
Two rudder ratio changer modules (RRCM), one located in the leftand the right CSEU’s, provide redundant control of the ratio changeractuator solenoid valve and EHSV.
Face Plate Controls and Indications
Three fault balls: LVDT, MODULE FAULT and PCA indicatefailures in the ratio changer system. A TEST FAIL fault ball indicatesa system failure during the ground test. A RESET switch resets thefault balls after corrective maintenance action is completed.
A two position test switch enable the ground test. An amber INTEST light illuminates during the ground test operation.
Maintenance Practices
When a fault ball is set on a RRCM, the RRCM cannot control theratio changer actuator. Card faults cause the MODULE fault ball toset which requires module replacement as the cards are not identifiedas line replaceable units. Operation is permitted with one RRCMfaulted or not installed.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 194
M0007C12.PST
RUDDER RATIO CHANGER MODULES

RATIO CHANGER MECHANISM
(TYP)
FAULTBALL
CRANK
SOLENOIDVALVE
SPRINGSACTUATORCHANGERRATIO
EHSV
RUDDERRATIO LIGHT
EICAS
MAIN EQUIPMENT CENTER
(E2-1)RIGHT CSEU
LEFT CSEU(E1-1)
RRCM62721AOA
TEST
NORMAL
IN TEST
TEST
FAIL LVDT
FAULTMODULE
RCA
RESET
CHANGER MODULERUDDER RATIO
P/N 285T0014-
SERIAL NO
BOEING
FWD
FWD
g62721ao B767 − Electrical / Instrument Book 11 − Page 195RUDDER RATIO CHANGER MODULES

General Description
The rudder ratio changer modules (RRCM) use airspeed signals fromthe stabilizer trim and aileron lockout modules (SAM) to control theratio changer actuator.
Operation
A left or right SAM / RRCM pair is randomly selected during SAMpower-up to control the actuator. The other SAM / RRCM pairremains in a standby mode.
Energizing the ratio changer actuator solenoid valve opens the bypassvalve and provides left hydraulic system pressure to the middle PCAand to the EHSV.
A dual LVDT on the ratio changer mechanism provides a mechanismposition feedback signal to the RRCM for operation and faultdetection. A separate LVDT element inputs to each RRCM.
Left hydraulic system pressure is monitored by the RRCM’s toenable or disable operation and for fault annunciation.
Air / ground system inputs are used to enable the RRCM groundtest.
Failure of SAM or RRCM
Failure of the controlling SAM or RRCM causes the transfer ofcontrol to the other pair through the logic crossfeed between theRRCM’s.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 196
M0007AD7.PST
RATIO CHANGER BLOCK DIAGRAM

RIGHT RUDDERRATIO MODULE
M529
1 & 2A/G SYS
SWSYS PRESSLEFT HYD
TO MIDDLE POWERCONTROL ACTUATOR
VALVEBYPASS
RATIO CHANGERACTUATOR
RIGHT STAB
MODULELOCKOUTTRIM/AIL
A/S
MODULELOCKOUTTRIM/AILLEFT STAB
A/S
RATIO MODULELEFT RUDDER
M528
SOLENOIDVALVE
M626
MECHANISMAFT QUADRANT
CR
OS
SF
EE
D
CONTROL PATHSPRIMARY & SECONDARY
LVDTMECHANISMCHANGERRATIO
SYSTEML HYD
EHSVLO
GIC
(E2-1)
HYDRAULIC
MECHANICAL
ELECTRICAL
(E1-1)
62721BEA
.
ADC
ADC
g62721be B767 − Electrical / Instrument Book 11 − Page 197RATIO CHANGER BLOCK DIAGRAM

General Description
The two rudder ratio changer modules (RRCM) receive a speedsignal from the stabilizer trim and aileron lockout modules (SAM).The left SAM controls the left RRCM and the right SAM the rightRRCM. One SAM / RRCM pair is in control while the other pair isin standby mode.
The RRCM has two basic functions:
• To control the ratio actuator.• To monitor the operation for faults.
A dual LVDT on the ratio actuator mechanism provides a feedbacksignal to the RRCM’s left and right.
SAM Function
The SAM receives air data from both ADC’s. An automatic ADCsource selection takes place. The SAM outputs a speed signal and avalidating signal to the RRCM. The speed signal is generated by therudder ratio program. A speed signal valid is outputted when thespeed signal is correct, there is no fault in the SAM and at least oneADC is valid. If these conditions do not exist, the validation signal isremoved.
RRCM Function
The RRCM is powered by the power supply module (PSM) of theCSEU. An engage/disengage relay in the RRCM is energized byseparate 28v dc power. When the relay is energized, this power andthe speed signal are sent to the ratio actuator. The RRCM alsoamplifies the speed signal from the SAM before sending it to theEHSV of the ratio actuator.
Any disengagement of the relay is signaled to the other RRCM.
Fault Detection
Faults are detected by the RRCM and indicated by fault balls on theRRCM and by EICAS messages and an amber light.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 198
M0007B33.PST
RUDDER RATIO CHANGER MODULE OPERATION

62721AIA
SIGNAL VALIDSPEED
FAULT
RELAYENGAGE
HIGHHYD PRESS
26V AC
LEFT RUDDER RATIO CHANGER MODULE
FAULT
BALLFAULT
FAULTSAM
SIGNALSPEED
P11
TO R RRCM
TO R RRCM
COMPUTERSTO EICAS
ACTUATORCHANGERRUDDER RATIO
LVDTDUAL
EHSV
VALVESOLENOID
DISENGAGEENGAGE/
AMPLIFIER
ENGAGING CONDITIONS___________________
SPEED SIGNAL VALID
OPPOSITE MODULE NOT
LEFT HYDRAULICPRESSURE HIGH28V
DC
BALL
SAM
DA
VALIDADC
PROGRAMRATIORUDDER
MONITORINGFAULT
SELECTIONSOURCEADC
LEFT STAB TRIM AND AIL LOCKOUT MODULE
PSM 1L/2L
15V DC
S27 ELEC HYDPUMP L CONT PRESS
POWERSUPPLY
L BUS28V DC
RUDDER RATIO
P
2400 PSI
R ADC
L ADC
ENGAGED
NO LVDT FAULT
NO INTERNAL RRCM FAULTNO EXTERNAL FAULT
A
A
.
g62721ai B767 − Electrical / Instrument Book 11 − Page 199RUDDER RATIO CHANGER MODULE OPERATION

RRCM Fault Balls
Three fault balls identify failures on the face of the RRCM.
• The LVDT fault ball is set when an LVDT failure has occurred.• The PCA fault ball is set when a fault external to the RRCM,
other than an LVDT fault, exists.• The MODULE fault ball is set when there is an internal fault in
the RRCM.
The fault balls are latched and are reset by pushing on the resetswitch on the face of the RRCM.
The engage relay de-energizes and transfers operation to the otherRRCM if:
• Any one of the three fault balls is set.• The left hydraulic system pressure is low.• The speed signal valid from the SAM is removed.• Or the opposite module is in test.
When any one of the three fault balls is set, or the opposite RRCMis absent, the RUDDER RATIO maintenance message appears onEICAS after a 20 seconds time delay.
Rudder Ratio Failure Annunciation
When both RRCM’s have failed, or the left hydraulic systempressure is low, the RUDDER RATIO advisory message appears onEICAS after a 30 second time delay, and the amber light RUDDERRATIO illuminates on the P5 panel immediately.
Ground Test
A ground test can be initiated by moving the test switch to TESTposition. Both RRCM’s are in test while operating the test switchfrom only one module. The ground test requires high left hydraulicsystem pressure and correct electrical power. During the test theamber IN TEST LED on the RRCM illuminates for 15 seconds. Theratio changer actuator is moved to the 360 kts (high speed) testposition. If the test fails, the TEST FAIL fault ball is set.
As long the test switch is in the TEST position, the amber RUDDERRATIO light and the advisory message on EICAS remainilluminated.
If both RRCM fail the test, the TEST FAIL fault ball on bothmodules is set and the illuminated RUDDER RATIO light andadvisory message are latched.
The TEST FAIL fault ball is also set if the test switch is returned tothe NORMAL position before test completion.
The test switch is then moved to the NORMAL position. The ratiochanger actuator returns to low speed position. The RUDDERRATIO light, advisory message and IN TEST LED come on for 15seconds. Failure to return to low speed position sets the TEST FAILfault ball. If both modules fail the test, both TEST FAIL fault ballsare set and the illuminated RUDDER RATIO light and advisorymessage are latched.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 200
M0007B9F.PST
RUDDER RATIO FAULT ANNUNCIATION

RESET
PCA
MODULEFAULT
LVDT
TEST
IN TEST
FAIL
NORMAL
TEST
(MAINT MSG) 20 SEC TD
OPP MOD MISSING
OPP MODULE IN CONTROL
RRCMTO OPP
PCA
LVDT F/BPCA F/BMODULE F/BMODULE
HYD PRESS HIGHSPEED SIGNAL VALID
RESETFAULTRRCMINTERNAL
F/B
LATCH
RESET F/B
LATCHFAULTEXTERNAL
RESET F/BLVDT
FAULTLVDT
LATCH
LATCH
RUDDER RATIO CHANGER MODULE (TYPICAL)
(P36)K529
(P33)K518
GND
GND
ON GND
NORMAL
TEST
15V DC
RESET
RESETPOWERDC
GND TESTFUNCTIONS
INTEST
15 SEC
LED
WITHINCYCLEDTEST SW
15 SEC
TEST FAIL
F/BTEST FAILRESET
OPP TEST FAIL
SW IN TEST
DUAL MODULE FAIL
HYD PRESS HIGH
ENGAGEDOPPOSITE MDL
28V DC
AMPLIFIEDSPEED SIGNAL
CONTROL
ENGAGE/DISENGAGE
RELAYENGAGE
TO SOL VALVE
(RR ACTUATOR)TO EHSV
RRCM
MD & TA
RUDDER
P5
A
RATIO CHANGER MODULE (TYP)
FAULTBALL
EICAS COMPUTERS
RUDDER RATIO (Y)
RUDDER RATIO (W)
RATIO
TO OPP
62721ALA
(ADV MSG) 30 SEC TD
.
g62721al B767 − Electrical / Instrument Book 11 − Page 201RUDDER RATIO FAULT ANNUNCIATION

General
A switch on each RRCM enables selection of TEST or NORMALposition (not spring-loaded). When either module test switch is in theTEST position, both modules are in test mode. The module with theactual test switch moved controls the actuator. The test switchoperates only with the airplane in the ground mode. Left hydraulicsystem pressure is required for actuator operation and to turn off theamber light and advisory message.
Test Switch
Moving the Switch to TEST:
• Drives the ratio changer to the test position (360 knots).• Illuminates the IN TEST light on both modules for 15 seconds
which is the time allowed for test completion.• Illuminates the amber RUDDER RATIO light on the P5 panel
and displays the amber RUDDER RATIO advisory message onEICAS as long as the switch is in TEST.
• If after 15 seconds the ratio changer mechanism has not driven tothe test position as determined by the LVDT feedback, the TESTFAIL fault ball sets on the module in test or on both modules andthe annunciation by the RUDDER RATIO light and message islatched.
Moving the Switch to NORMAL:
• Drives the ratio changer to the low speed position.• Illuminates the IN TEST light on both modules for 15 seconds
which is the time allowed for test completion.
• Illuminates the amber RUDDER RATIO light on the P5 paneland displays the amber RUDDER RATIO advisory message onEICAS until successful test completion.
• If after 15 seconds the ratio changer mechanism has not driven tothe low speed position as determined by the LVDT feedback, theTEST FAIL fault ball sets on the module in test or on bothmodules and the annunciation by the RUDDER RATIO light andmessage is latched.
Moving the test switch to TEST and returning it to NORMAL beforecompletion of the test sets the TEST FAIL fault ball on bothRRCM’s and latches the annunciation by the RUDDER RATIOamber light and advisory message.
NOTE: Make sure the rudder moves no more than 0.03 inch whenthe RRCM test switch is moved to test then normal. If therudder moves to the right, you must decrease the length ofthe BLUE (right) control rod. If the rudder moves to theleft, you must increase the length of the BLUE (right)control rod.
NOTE: The BLUE control rods fit between the feel, centering andtrim mech and the ratio-changer mech and are adjusted byrotating a knurled adjustment knob on lower end of rod.
27.21 − RUDDER − RUDDER RATIO CHANGER B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 202
M0007BC1.PST
RATIO CHANGER MODULE TEST

TO 360K POSITION WITHIN 15 SEC
RUDDER RATIO "C" LEVEL EICAS (SAME REQUIREMENTS AS LIGHT)
IF TEST FAIL- ILLUMINATION LATCH SETS IN TEST MODE- ILLUMINATES WITH SWITCH
TO TEST POSITION
FAULTBALL SET IF FAILURE TO MOVE
ILLUMINATES FOR 15 SEC
TO LOW SPEED POSITION WITHIN 15 SEC
(HIGH AUTHORITY)TO LOW SPEED POSN
RUDDER RATIO "C" LEVEL EICAS (SAME REQUIREMENTS AS LIGHT)
ACTUATOR DRIVES
- ILLUMINATION LATCH SETS IF TEST FAIL AFTER SWITCH RETURNED TO NORMAL- REMAINS ILLUMINATED FOR 15 SEC
FAULTBALL SET IF FAILURE TO MOVE
ILLUMINATES FOR 15 SEC
LVDT
ACTUATOR DRIVES
LVDT
62721AMA
A
P5
RATIORUDDER
RRCMRIGHT
15V DC PSM 1L/2L
P11 OVHD CB PNL
A
P5
RATIORUDDER
GND MODE
L HYD VALID
26V AC PSM 1L/2L
(G10)RUDDER RATIO
L BUS28V DC
NORMAL TEST
TEST NORMAL
MODULE (TYP)L RATIO CHANGER
MODULE (TYP)L RATIO CHANGER
TEST
NORMAL
IN TEST
FAILTEST
FAILTEST
TEST
NORMAL
IN TEST
.
g62721am B767 − Electrical / Instrument Book 11 − Page 203RATIO CHANGER MODULE TEST

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age204
INT
EN
TIO
NA
LLYB
LAN
K

YAW DAMPING SYSTEM
g62721am B767 − Electrical / Instrument Book 11 − Page 205

General Description
The yaw damper system provides automatic rudder control toimprove airplane ride quality, dampen gust load on the verticalstabilizer, dampen undesirable sideslip and roll (dutch roll) andcoordinate turns.
System Components
The yaw damper system includes two independant yaw dampermodules (YDM) each controlling a yaw damper servo actuator. Thedual system uses inputs from the air data computers (ADC’s) (forairspeed), the inertial reference units (IRU’s) (for yaw rate), servoactuator LVDT’s, modal suppression accelerometers (installed on767-300 only) and air/ground relays to command rudder movement.Pressure switches in the left and centre hydraulic systems input forfault detection and indication.
Summing Linkage Assembly
Movements of the yaw damper servos are summed by a summinglever before transfer to the summing linkage assembly whichcommands the rudder. The maximum amount of rudder commandavailable for yaw damping depends on airspeed and the number ofADC’s and IRU’s supplying data.
• When both yaw damper servos are operative in flight, maximumyaw damper input to the rudder is approximately 6 degrees ineach direction.
• When one servo is operative, maximum rudder movement isapproximately 3 degrees in each direction.
Controls and Indications
The yaw damper control panel is located on the P5 overhead paneldirectly above the hydraulic control panel.
It includes two control ON/OFF pushbutton light switches controllingthe servo engage power to the yaw damper modules and ultimatelyto the yaw damper servos.
The yaw damper light switches contain an ’ON’ white light and an’INOP’ amber light. A failure of a yaw damper or during testilluminates the associated ’INOP’ amber light and the advisory L (R)YAW DAMPER message on EICAS.
Yaw Damper Test Switch
The yaw damper test switch, located on the P61 panel, is athree-position switch spring loaded to the center position. The switchoperation allows testing of the yaw dampers on the ground resultingin the rudder movement and causing a test of the IRU’s.
Yaw Damper Modules
The yaw damper modules use inputs from the air data computers(ADC’s) and the inertial reference units (IRU’s) to calculate therudder movement commands required to dampen undesirable sideslipand roll motion (dutch roll), and for turn coordination.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 206
M0007C62.PST
YAW DAMPER SYSTEM

L RYAW DAMPER
w
a
w
aINOP
ON
INOP
ON
YAW DMPRL
R
C HYD
L HYD
FWD
YAW DAMPERTEST SWITCH
EICAS COMPUTERS
YAW DAMPERSERVO
YAW DAMPERSERVO
CSEU PWR SUPPLIES
AIR/GND SYS
CSEU PWR SUPPLIES1L AND 2L
A
ADP CONTROL
ACMP CONTROL
B
A
B
L YAW DAMPERR YAW DAMPER
YAW DAMPER
EICAS DISPLAY UNITS (P2)
1R AND 2R
PRESS. SWITCH
PRESS. SWITCH
YAW DAMPER MODULE L (E1-1)
CHANGER
TO PCA’s
IRU L, C, R
ADC L AND R
TO RUDDERRATIO
RIGHT
LEFT
YAW DAMPER MODULE R (E2-1)
L MODALSUPPRESSIONACCELEROMETER
SUPPRESSIONACCELEROMETER
R MODAL
MODALSUPPRESSIONACCELEROMETERS
YAW DAMPER CONT PANEL (P5)
(P61)
S29 (C HYD)
S27 (L HYD)
RESET DISPLAY
DISPLAYFAULTSYSTEM
RESET DISPLAY
DISPLAYFAULTSYSTEM
62221ABA
1
APPLICABLE TO 767-300 ONLY
1
1
1
28V DCR DC BUS
28V DCSTBY BUS RUDDER SUMMING
LINKAGE ASSY
YAW DAMPER SERVOSSUMMING LEVER
INTERNALLVDT
EHSV
g62221ab B767 − Electrical / Instrument Book 11 − Page 207YAW DAMPER SYSTEM

Yaw Damper Modules (Continued)
The yaw damper modules output electrical power signals to the yawdamper servos. One signal is the engage power to the servo solenoidvalve and the other is the controlling current to the servoelectro-hydraulic servo valve.
The modules also monitor the operation of the yaw damper system.If a fault is detected, it is annunciated on a 12 characteralpha-numeric LED display located on the module front panel. If afault message is recorded in either yaw damper module non-volatilememory (NVM), the EICAS message “YAW DAMPER’ appears onthe maintenance page.
A failure of a yaw damper results in the removal of the engagepower to the servo solenoid valve and annunciation by illuminationof the amber ’INOP’ light and the EICAS advisory message.
The modules provide for automatic and manual ground testing.
Yaw Damper Servos
The yaw damper servos use electrical commands from the yawdamper modules to hydraulically position the actuator piston. Theservos mechanical outputs are summed by a summing lever inputtingto the rudder summing linkage assembly. With both servos operating,the maximum authority of the yaw damper system is 6 degrees ofrudder movement in each direction while it is reduced to 3 degrees ifone servo is inoperative. It is linked in series with manual andautopilot inputs to the rudder power control actuators (PCA’s).
Modal Suppression Accelerometer (B767–300 only)
A modal suppression accelerometer is installed on the aft ceiling inthe aft cargo compartment of the B767–300 airplane. Theaccelerometer provides to the yaw damper modules lateralacceleration data of the aft end of the airplane. This data aids theyaw damper modules in controlling yaw and turn coordination andimproves aft cabin comfort.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 208
M0007C62.PST
YAW DAMPER SYSTEM(Continued)

L RYAW DAMPER
w
a
w
aINOP
ON
INOP
ON
YAW DMPRL
R
C HYD
L HYD
FWD
YAW DAMPERTEST SWITCH
EICAS COMPUTERS
YAW DAMPERSERVO
YAW DAMPERSERVO
CSEU PWR SUPPLIES
AIR/GND SYS
CSEU PWR SUPPLIES1L AND 2L
A
ADP CONTROL
ACMP CONTROL
B
A
B
L YAW DAMPERR YAW DAMPER
YAW DAMPER
EICAS DISPLAY UNITS (P2)
1R AND 2R
PRESS. SWITCH
PRESS. SWITCH
YAW DAMPER MODULE L (E1-1)
CHANGER
TO PCA’s
IRU L, C, R
ADC L AND R
TO RUDDERRATIO
RIGHT
LEFT
YAW DAMPER MODULE R (E2-1)
L MODALSUPPRESSIONACCELEROMETER
SUPPRESSIONACCELEROMETER
R MODAL
MODALSUPPRESSIONACCELEROMETERS
YAW DAMPER CONT PANEL (P5)
(P61)
S29 (C HYD)
S27 (L HYD)
RESET DISPLAY
DISPLAYFAULTSYSTEM
RESET DISPLAY
DISPLAYFAULTSYSTEM
62221ABA
1
APPLICABLE TO 767-300 ONLY
1
1
1
28V DCR DC BUS
28V DCSTBY BUS RUDDER SUMMING
LINKAGE ASSY
YAW DAMPER SERVOSSUMMING LEVER
INTERNALLVDT
EHSV
g62221ab B767 − Electrical / Instrument Book 11 − Page 209YAW DAMPER SYSTEM
(Continued)

General Description
The two yaw damper servos are mounted side-by-side on the aft sparof the vertical stabilizer. They both input to a summing lever and therudder summing linkage assembly to operate the rudder. The lefthydraulic system powers the right servo while the center systempowers the leftservo.
The following components are part of the yaw damper servoassembly:
Solenoid Valve
Electrical power to the solenoid valve is controlled by the yawdamper “ON-OFF” switch, located on the P5 panel, through the yawdamper module auto-disengage relay. When energized, the solenoidopens the line replaceable valve to allow hydraulic pressure to theelectro-hydraulic servo valve (EHSV). The left servo uses 28 volts dcfrom the standby bus while the right servo uses power from the rightdc bus.
Electro-Hydraulic Servo Valve
The line replaceable electro-hydraulic servo valve (EHSV) iscommanded by current signals from the respective yaw dampermodule to port hydraulic pressure to the actuator piston.
Filter
A line replaceable 25 micron filter is located in the pressure inletline.
Linear Variable Differential Transformer
An LVDT located at the lower side of the servo is connected to theactuator piston. The LVDT signal is the feedback signal to the yawdamper module and verifies the execution and nulling of the inputcommand to the servo.
Control and Indication
The yaw damper switches located on the P5 panel control, throughthe yaw damper module auto-disengage relay, their respective servosolenoid valve. With the switch depressed the white “ON” indicatorlight appears in the upper half.
The lower half of the switches contain an amber “INOP” light whichis illuminated when:
• The respective yaw damper switch is “OFF”.• One yaw damper module is not installed.• The yaw damper function is lost.• Testing during power-up and pre-flight, is taking place
Servo Operation
Hydraulic system pressure is allowed through the open solenoidvalve to the electro-hydraulic servo valve (EHSV) which, under thecommand of the yaw damper module, meters it to the actuatorpiston. The movement of the actuator piston positions the LVDT
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 210
M001420F.PST
YAW DAMPER SERVOS

ELECTRO-HYDRAULICSERVO VALVE
P C C R1 2P C R
SOLENOIDVALVE
FILTER
POSITION LVDT
PRESSUREPORT
RETURN PORT
DRAINHOLE YAW DAMPER SERVO
DETENTCENTERINGSPRING
SOLENOID VALVE
ELECTRO-HYDRAULICSERVO VALVE
ELECTRICALCONNECTOR
OUTPUT
LINEAR VARIABLEDIFFERENTIALTRANSFORMER
YAW DAMPER SERVO
INOP
ON
INOPa
wON
a
w
YAW DAMPER
RL
OVERHEAD PANEL (P5)
G62721BM
.
g62721bm B767 − Electrical / Instrument Book 11 − Page 211YAW DAMPER SERVOS

Servo Operation (Continued)
feeding back a signal to the yaw damper module. A detent centeringspring holds the actuator piston centered when the servo is notpowered in order to provide a centered fixed point for the outputsumming lever.
Each servo actuator has a stroke of 1.50 in. providing for 3 degreesof rudder movement in each direction.
Output Linkage
The two yaw damper servos output rods are connected to a summinglever outputing at its centre by means of a connecting rod to thetorque tube input lug of the rudder summing linkage assembly.
When both yaw dampers are operating, their maximum output resultsin a 6 degrees rudder movement in each direction. If only one yawdamper is operative, its maximum output results in a 3 degres ruddermovement in each direction.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 212
M001420F.PST
YAW DAMPER SERVOS(Continued)

ELECTRO-HYDRAULICSERVO VALVE
P C C R1 2P C R
SOLENOIDVALVE
FILTER
POSITION LVDT
PRESSUREPORT
RETURN PORT
DRAINHOLE YAW DAMPER SERVO
DETENTCENTERINGSPRING
SOLENOID VALVE
ELECTRO-HYDRAULICSERVO VALVE
ELECTRICALCONNECTOR
OUTPUT
LINEAR VARIABLEDIFFERENTIALTRANSFORMER
YAW DAMPER SERVO
INOP
ON
INOPa
wON
a
w
YAW DAMPER
RL
OVERHEAD PANEL (P5)
G62721BM
.
g62721bm B767 − Electrical / Instrument Book 11 − Page 213YAW DAMPER SERVOS
(Continued)

General
Testing of the yaw damper system is done on the ground uponpower-up and for preflight.
Modes
• Power up mode (ground or air). Initializes all interfaces, latches,commands and resets monitors (no actuator movement).
• Flight mode (Entered when the airplane is airborne and fade-in iscompleted).
• Ground operational mode (after power up mode or preflight testor when the aircraft lands (Airplane is on the ground and fade-outis complete)
Power-up Test
The power-up test is initiated automatically on the ground uponpower-up of the YDM, and manually when the control switch ispushed ON. During the test, the yaw damper switch ’INOP’ amberlight illuminates for 20 seconds, the associated level ’C’ advisorymessage L (R) YAW DAMPER appears on EICAS and the LEDdisplay located on the yaw damper module (YDM) front panelilluminates the ’TEST RUNNING’ message.
The power up test checks the validity of the yaw damper moduleinternal hardware and software including the control and monitormicroprocessors, the disengage and latching circuits, and theread/write memory.
At the completion of a successful power-up test, the yaw damperswitch ’INOP’ amber light extinguishes, the level ’C’ EICASmessage disappears, the LED display illuminates the ’NO FAULTS’or ’NO FAULTS NOW’ messages and 28 volts dc power is allowedto the solenoid valve of the yaw damper servo. The yaw dampermodule is then ready for ground operational mode.
If the power up test fails, the yaw damper switch ’INOP’ amber lightremains illuminated , the associated level ’C’ message ’L (R) YAWDAMPER’ appears on EICAS, the LED display illuminates the’FAULTS NOW’ message and 28 volts dc power is inhibited to thesolenoid valve preventing operation of the yaw damper servo.
Preflight Test
The preflight test is initiated on the ground, with the yaw dampermodule in ground operational mode, by moving the yaw damper testswitch located on the P61 panel. During the test, both yaw damperswitch ’INOP’ amber lights illuminate, the level ’C’ messages ’LYAW DAMPER’ and ’R YAW DAMPER’ appear on EICAS and theLED display of the tested module illuminates the ’TEST RUNNING’message. The other module LED display illuminates the ’NOFAULTS NOW’ message. One yaw damper system is tested at atime. The preflight test requires left and centre hydraulic pressure forYDM and servo operation.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 214
M0007C7B.PST
YAW DAMPER TESTING

AILELEVAIL
RUD
LC
R
EICAS DISPLAYUNITS
YAW DAMPER CONTROL PANELP5 PILOT’S OVERHEAD PANEL
YAW DAMPER TEST SWITCHP61 RIGHT SIDE PANEL
INOP
ON
INOPa
wON
a
w
YAW DAMPER
RL
YAW DAMPER CONTROL PANEL (P5)
62721AWA
YAW DMPRL
R
EICAS DISPLAY UNITS (P2)
POSITIONRUDDER
INDICATOR
L YAW DAMPERR YAW DAMPER
33
BOEINGSERIAL NO.
YDM RESET
LVDT
IRU DADC YD ACT
AIR/GRD
P/N285T0013-
DISPLAYRESET
P/A 285T0013SERIAL NO.
BOEING
YAW DAMPER MODULE (OLD) YAW DAMPER MODULE (NEW)
HYDPRESS
INOP LIGHT ON FORDURATION OF PREFLIGHT TEST
P61
g62721aw B767 − Electrical / Instrument Book 11 − Page 215YAW DAMPER TESTING

Preflight Test (Continued)
The preflight test exercises the yaw damper module through variouscommands to test the output and the return LVDT position feedbacksignals. The yaw damper module commands result in a 3 degreesmovement of the rudder in both directions. In addition the testinitiates testing of the IRU’s and verifies their proper inputs to themodule.
At the completion of a successful preflight test, the yaw damperswitch ’INOP’ amber lights extinguish, the EICAS level ’C’messages disappear, the LED display of the tested moduleilluminates the ’NO FAULTS’ or ’NO FAULTS NOW’ message andthe yaw damper module is returned to ground operational mode.
If the preflight test fails, the yaw damper switch ’INOP’ amber lightremains illuminated for the faulted system, the applicable level ’C’message remains on EICAS, the LED display illuminates the’FAULTS NOW’ message and 28 volts dc power is inhibited to thesolenoid valve preventing the yaw damper servo operation.
Operation
The manual operation of the preflight test on the ground requireselectrical and hydraulic power.
WARNING
All personnel and stands should remain clear ofcontrol surfaces and control columns whenhydraulic systems are pressurised.
Before testing, insure the following:
• Electrical: The ac and dc circuit breakers for the flight controlelectronics and the circuit breakers for the yaw dampers areclosed. The yaw damper switches on the P5 panel are depressedto the ’ON’ position.
• Hydraulic: The center and left hydraulic system are pressurised.The centre hydraulic pressure is used by the left yaw dampermodule and the right servo while the left hydraulic pressure isused by the right yaw damper module and the left servo.
• Interfacing systems: The operation of the following interfacingsystems is required: Air data computers (ADC’s); Inertialreference system (IRU’s): The three IRU’s need to be aligned andin the ’NAV’ mode; EICAS: Status page; Air ground relays:Ground mode.
NOTE: The left yaw damper servo is located on the right side andthe right yaw damper servo is located on the left sidelooking from the rear of the aircraft.
After power-up of the yaw damper modules, insure a successfulcompletion of the power-up test by observing that the yaw damperswitch ’INOP’ amber lights are extinguished, no ’L(R) YAWDAMPER’ messages appear on EICAS and the LED displayilluminates ’NO FAULTS’ or ’NO FAULTS NOW” messages.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 216
M0007C7B.PST
YAW DAMPER TESTING(Continued)

AILELEVAIL
RUD
LC
R
EICAS DISPLAYUNITS
YAW DAMPER CONTROL PANELP5 PILOT’S OVERHEAD PANEL
YAW DAMPER TEST SWITCHP61 RIGHT SIDE PANEL
INOP
ON
INOPa
wON
a
w
YAW DAMPER
RL
YAW DAMPER CONTROL PANEL (P5)
62721AWA
YAW DMPRL
R
EICAS DISPLAY UNITS (P2)
POSITIONRUDDER
INDICATOR
L YAW DAMPERR YAW DAMPER
33
BOEINGSERIAL NO.
YDM RESET
LVDT
IRU DADC YD ACT
AIR/GRD
P/N285T0013-
DISPLAYRESET
P/A 285T0013SERIAL NO.
BOEING
YAW DAMPER MODULE (OLD) YAW DAMPER MODULE (NEW)
HYDPRESS
INOP LIGHT ON FORDURATION OF PREFLIGHT TEST
P61
g62721aw B767 − Electrical / Instrument Book 11 − Page 217YAW DAMPER TESTING
(Continued)

Operation (Continued)Move the yaw damper test switch to the ’L’ or ’R’ position andobserve the following:
• Both yaw damper switch ’INOP’ amber lights are illuminated.• Both level ’C’ advisory messages ’L YAW DAMPER’ and ’R
YAW DAMPER” appear on EICAS.• The LED display illuminates the ’TEST RUNNING’ message on
the tested module.• On the EICAS status page, observe the rudder movement to 3
degrees right then 3 degrees left and return to the neutral fairedposition.
• Both yaw damper switch ’INOP’ amber lights extinguish.• Both EICAS level ’C’ advisory messages disappear.• The LED display illuminates the ’NO FAULTS’ or ’NO FAULTS
NOW’ message.
If any IRU input is not within limits, the ’FAULTS NOW’ messageis illuminated on the LED display and the maintenance message’YAW DAMPER’ appears on EICAS. The yaw damper switch’INOP’ amber lights are extinguished at completion of the test ifonly one IRU provides correct input signals. Review of the fault bydepressing the ’DISPLAY’ button on the face of the moduleilluminates the fault message ’L (C, R) IRU’ on the LED display.
If the preflight test fails, the yaw damper switch ’INOP’ amber lightremains illuminated for the faulted system, the applicable level ’C’message remains on EICAS, the LED display illuminates the’FAULTS NOW’ message and 28 volts dc power is inhibited to thesolenoid valve preventing the yaw damper servo operation.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 218
M0007C7B.PST
YAW DAMPER TESTING(Continued)

AILELEVAIL
RUD
LC
R
EICAS DISPLAYUNITS
YAW DAMPER CONTROL PANELP5 PILOT’S OVERHEAD PANEL
YAW DAMPER TEST SWITCHP61 RIGHT SIDE PANEL
INOP
ON
INOPa
wON
a
w
YAW DAMPER
RL
YAW DAMPER CONTROL PANEL (P5)
62721AWA
YAW DMPRL
R
EICAS DISPLAY UNITS (P2)
POSITIONRUDDER
INDICATOR
L YAW DAMPERR YAW DAMPER
33
BOEINGSERIAL NO.
YDM RESET
LVDT
IRU DADC YD ACT
AIR/GRD
P/N285T0013-
DISPLAYRESET
P/A 285T0013SERIAL NO.
BOEING
YAW DAMPER MODULE (OLD) YAW DAMPER MODULE (NEW)
HYDPRESS
INOP LIGHT ON FORDURATION OF PREFLIGHT TEST
P61
g62721aw B767 − Electrical / Instrument Book 11 − Page 219YAW DAMPER TESTING
(Continued)

YDM BITE Functions
The YDM’s isolate faults to the LRU level within the yaw dampersystem and interfacing units. Faults are stored in the non-volatilememory of the modules. DISPLAY and RESET buttons on the YDMare used to recall and clear stored faults. Faults are indicated bymessages on a 12 character LED display.
Two different categories of faults are detected:
• Present system faults which indicate real-time status of thesystem.
• Last flight leg faults which occurred between the last takeoff andthe following landing.
The last flight leg fault messages have an asterisk (*) on the left sideof the display to differentiate them from present faults.
Fault Review
To review faults, the DISPLAY button is pushed successively. Amessage on the display indicates the status of faults. If there is nofault, NO FAULTS is displayed. If there are faults, the messageFAULTS NOW indicates there are present faults. Pushing theDISPLAY button recalls the faults one by one. The message NOLEG FAULT would indicate there is no last flight leg fault inmemory. The message NO FAULT NOW followed by LAST LEGindicates that there is no present fault but there are last flight legfaults. The message FAULTS NOW is followed by the faultmessages. Then if the LAST LEG message appears, it indicates thereare last flight leg faults.
Fault Reset
The RESET button is pushed to clear the display and initiate thepower-up test. Pushing the DISPLAY button for 2 seconds resets thedisplay to the first existing message. Pushing the RESET andDISPLAY buttons together clears the last flight leg faults from thedisplay. They can be displayed again by cycling YDM power ONand OFF. The non-volatile memory of the YDM is cleared 30seconds after a ground to air input.
27.21 − RUDDER − YAW DAMPING SYSTEM B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 220
M0007CA3.PST
YAW DAMPER BITE

* X X X X X (LAST LEG FAULT MESSAGE)
NO FAULTS
FAULTS NOW NO LEG FAULT LAST LEG TEST RUNNING X X X X X (FAULT NOW MESSAGE)
NO FAULT NOW ACCELYDM
CHAN CODEL ADCR ADCADC DIFF
26 VACL IRUC IRUR IRUIRU DIFFLVDTYD ACTHYD SWITCH
NO LEG FAULT
LRU FAULTSCHANNEL AND
CURRENTLIST OF
FAULTS NOW
LRU FAULTS* CHANNEL AND
LAST LEG* LIST OF
LAST LEG
NO FAULT NOW
LRU FAULTS* CHANNEL AND
LAST LEG* LIST OF
LAST LEG
LRU FAULTSCHANNEL AND
CURRENTLIST OF
FAULTS NOW
NO FAULTS
NO FAULTS
FAULTS NOWONLY
LEG FAULTSONLY
FAULTS NOWAND LEG FAULTS
CAUTION: ENSURE FLT CONT (CSEU) AC AND DCCBS ARE OPEN PRIOR TO REMOVAL OR
INSTALLATION OF THIS LRU
FAULT
DISPLAY
* MEANS LAST
TO CLEAR LAST FLIGHT
HOLD DISPLAY BUTTON
CLEAR FAULTS &START INTERNAL
TEST (10 SECS)
LEG FAULTS PRESS &
& PRESS RESET
SYSTEM
FLIGHT LEG
EACH FAULTRESET
* L IRU
PRESS TO REVIEW
PRESS FOR 2 SECS TO
DISPLAY
BOEING ELECTRONICS COMPANY
REWIND DISPLAY.
BUTTON PRESS
DISPLAY BLANKS30 SECS AFTER LAST
BITE FAULT MESSAGE LIST
AIRGND 1AIRGND 2AIRGND 1/2AIRGND
ENGLISH MESSAGES
G62721AX
g62721ax B767 − Electrical / Instrument Book 11 − Page 221YAW DAMPER BITE

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age222
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER PANELS
g62721ax B767 − Electrical / Instrument Book 11 − Page 223

Rudder Travel Limits
Rudder surface travel limits are determined by internal stops in thePCA’s, aft quadrant stops and the position of the rudder ratiochanger mechanism. Inputs from the rudder pedals, trim actuator andautopilot actuators are changed by the position of the rudder ratiochanger mechanism. yaw damper inputs are not affected by theposition of the ratio changer mechanism.
• Low speed full travel is 26.5 degrees with the PCA’s at fullstroke and the aft quadrant against the stop.
• High speed (420 knots) full travel is approximately 2 degreeswith the aft quadrant against the stop.
• Moving the test switch to TEST on either RRCM, positions theratio changer mechanism to a high speed (360 knots) riggingposition. Rudder should not move more than 0.03 inches duringtest. Full travel of the rudder pedals in this test position wouldallow 3.2 to 4.9 degrees of rudder travel.
• Full time in-flight automatic rudder control is provided by twoyaw damper servos which have a maximum control capability ofapproximately 3 degrees each.
• Full trim actuator movement at low speed results in the ruddermoving 16.8 degrees with the trim actuator capable of providing67 percent of maximum rudder movement. Aircraft with higherthrust engines (RR RB211–524H36 on ZX aircraft) have actuatortrim authority of 80 percent of maximum rudder movement witha resulting rudder movement of 21.5 degrees.
NOTE: Always make sure the correct part number trim actuator isfitted to the Aircraft.
Autopilot control is available only during autoland operation and islimited to approximately 23 degrees.
27.20 − RUDDER − RUDDER PANELS B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 224
M000794E.PST
RUDDER SURFACE TRAVEL

16.8 27 INCHES
INDEX PLATE
INDEXPLATE
26.5
MINIMUM41.1"
RUDDER
62721BDA
FULL TRIM - LOW SPEED(67% TRIM ACTUATOR)
YAW DAMPER
80% TRIM ACTUATOR21.5 34.1 INCHES
FULL TRAVEL - HIGH SPEED(420 KNOTS)
APPROX 3.0
1
5.38-7.99"3.2-4.9
2.05
1
360 KNOTS - TEST SWITCH
FULL TRAVEL - LOW SPEED(<150 KNOTS)
g62721bd B767 − Electrical / Instrument Book 11 − Page 225RUDDER SURFACE TRAVEL

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age226
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER POSITION INDICATION
g62721bd B767 − Electrical / Instrument Book 11 − Page 227

General Description
The rudder position transmitter is mounted on the vertical stabilizernear the yaw damper summing mechanism. The transmitter ispowered by 28v ac and supplies a signal to the EICAS computers todisplay the rudder position pointer on the status page. The transmitteris held by a clamp that is bracket mounted to vertical stabilizer aftspar structure. it is attached to the rudder front spar by an adjustablerod. Access through panel 423EL, left side.
Transmitter Failure
If the transmitter is failed, there is no position pointer on the statuspage. The rudder operation must be visually checked for eachdispatch of the airplane. Full rudder movement on the ground shouldmove the pointer to or past the left or right mark on the status page.
Transmitter Replacement
The transmitter has two index marks on the housing and one on theshaft. With the rudder centered, the transmitter is inserted in themounting bracket with the marks aligned with the bracket mountingholes. After installation the transmitter is adjusted to obtain a signalof less than 50 millivolts by the null adjusting sleeve on the controlrod. The transmitter can also be adjusted by centering the pointer onthe status page.
Operation
The position transmitter is a synchro unit whose rotor moves inresponse to movement of the control surface. The position transmitteris powered by 28v ac from the left bus. Electrical signals generatedby the rotor position are fed to the EICAS computers in the mainequipment centre (MEC).
Surface Position Display
The control surface position display is available on the EICAS statuspage. The rudder will be displayed on the left corner of the lowerEICAS screen. Rudder position indicator registers 30° left and rightrudder deflection. A tolerance of half an arrow at neutral is allowed.
27.28 − RUDDER − RUDDER POSITION INDICATION B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 228
M0007DC9.PST
RUDDER POSITION TRANSMITTER

(REF)MECHANISMCHANGERRATIORUDDER
RUDDER POSITIONTRANSMITTER
MECHANISMYAW DAMPER
(REF)
EICAS DISPLAY (P2)
RUD
AIL ELEV AIL
NC
COMPUTERR EICAS
COMPUTER
M516 RUDDERPOSITIONTRANSMITTER
L EICAS
28V ACL BUS RUDDER
POSN(K16)
P11
(REF)LOWER PCA
62728AAA
MOUNTINGHOLES
BRACKET
ELECTRICALCONNECTION
POSITIONTRANSMITTER
SHAFTINDEXMARK
HOUSINGINDEX MARKS
POSITIONTRANSMITTER
BRACKET
CONTROLROD ASSY
NULLADJUSTMENTSLEEVE
CRANK
SEE A
A
DISPLAY
ENGINE STATUS
EICAS PANEL (P9)
E8 EQUIPMENTCENTRE
g62728aa B767 − Electrical / Instrument Book 11 − Page 229RUDDER POSITION TRANSMITTER

B767
−E
LEC
TR
ICA
L/
INS
TR
UM
EN
TB
OO
K11
−P
age230
INT
EN
TIO
NA
LLYB
LAN
K

RUDDER SYSTEM OPERATION SUMMARY
g62728aa B767 − Electrical / Instrument Book 11 − Page 231

Rudder Pedals
Pilot movement of the rudder pedals drives the aft quadrant assemblywith a pair of cables. Maximum pedal movement drives the aftquadrant against the mechanical stop and moves the rudder 26.5degrees in each direction at low airspeed and no air load.
Autopilot
Autopilot inputs cause the three directional roll out autopilot servosto drive the aft quadrant assembly. Autopilot inputs are provided inthe autoland mode only and can command the rudder toapproximately 23 degrees. Inputs backdrive the cable system toprovide input to rudder pedal steering.
Trim
Trim inputs from the flight deck control switch drive the aft quadrantassembly and provide a maximum rudder movement of 16.8 degrees.Trim operation backdrives the cables and rudder pedals.
Yaw Damper
Yaw damper inputs from two servos operate the yaw dampersumming mechanism. These inputs are summed with other ruddercontrol inputs. yaw damper inputs do not backdrive the cable system.Each servo has a maximum authority of approximately 3 degrees ofrudder travel. There are shear rivets in the yaw damper servo outputto the rudder control system.
Ratio Changer
The ratio changer mechanism provides a means of controlling theinputs to the PCA’s by varying the input to the PCA’s based onairspeed. The ratio changer actuator is controlled by rudder ratiochanger modules. At the high speed position, the ratio changermechanism limits rudder movement to a maximum of 2.15 degrees.
Power Control Actuators (PCA)
Three PCA’s move the rudder each using a different hydraulicsystem. The left hydraulic system pressure to the middle PCA passesthrough the ratio changer actuator. If the ratio changer function isfailed, the middle PCA is depressurized. Each PCA has an overridein the input linkage to its control valve.
System Adjustments
Eight rig pins are provided for adjusting the rudder system. Pins 1, 2and 3 are used to adjust the pedals. Pins 3 and 4 are used to adjustthe cables. Pin 4 sets the aft quadrant to neutral. Pin 6 and 7 areused to adjust the ratio changer mechanism. Pins 5 and 8 are used toadjust the PCA’s to neutral and to provide the summing linkagepreload.
Primary Control Path
A crush core load limiter prevents damage to the primary controlpath in the event of a system jam.
27.21 − RUDDER − RUDDER SYSTEM OPERATION SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 232
M0007A25.PST
RUDDER SYSTEM OPERATION

R-4R-7
R-6
R-5
R-3
RA
RB
DOORACCESSFWD
R-2
R-1
RUDDER PEDALSCAPTAIN’S
RIG PIN
FIRST OFFICER’S
CRANKSADJUSTMENTPEDAL
RUDDER PEDALS
MECHANISMPEDAL ADJ
STEERINGTO NOSEWHEEL
FWD QUADRANT
FWD
62720AFA
R-8
CENTER RUDDERPOWER CONTROLACTUATOR
LOWER RUDDERPOWER CONTROLACTUATOR
YAW DAMPERAND RUDDERRATIO CHANGERMECHANISMS
AUTOPILOT SERVOS,
AND TRIM MECHANISMRUDDER FEEL, CENTERING
UPPER RUDDERPOWER CONTROLACTUATOR
324BL
324EL
324GL
324JL
324LL
RUDDER
MECHANISMAND TRIMCENTERINGFEEL,
AUTOPILOT SERVOSDIRECTIONAL
ACTUATORTRIM
TEMPERATURECOMPENSATIONLINKAGE
YAW DAMPERSERVOS
RUDDER RATIOCHANGERMECHANISM
UPPERPCA
RUDDERHINGEFITTING(REF)
CENTERPCA
LOWERPCA
RUDDER POSITIONTRANSMITTER
YAW DAMPERMECHANISM
FIN REARSPAR (REF)
.
g62720af B767 − Electrical / Instrument Book 11 − Page 233RUDDER SYSTEM OPERATION

Secondary Control Path
A spring override is provided in the yaw summing linkage to preventdamage to the secondary control path in the event of a system jamand to eliminate backlash of the dual path linkage.
27.21 − RUDDER − RUDDER SYSTEM OPERATION SUMMARY B767 − ELECTRICAL / INSTRUMENT BOOK 11 − Page 234
M0007A25.PST
RUDDER SYSTEM OPERATION(Continued)

R-4R-7
R-6
R-5
R-3
RA
RB
DOORACCESSFWD
R-2
R-1
RUDDER PEDALSCAPTAIN’S
RIG PIN
FIRST OFFICER’S
CRANKSADJUSTMENTPEDAL
RUDDER PEDALS
MECHANISMPEDAL ADJ
STEERINGTO NOSEWHEEL
FWD QUADRANT
FWD
62720AFA
R-8
CENTER RUDDERPOWER CONTROLACTUATOR
LOWER RUDDERPOWER CONTROLACTUATOR
YAW DAMPERAND RUDDERRATIO CHANGERMECHANISMS
AUTOPILOT SERVOS,
AND TRIM MECHANISMRUDDER FEEL, CENTERING
UPPER RUDDERPOWER CONTROLACTUATOR
324BL
324EL
324GL
324JL
324LL
RUDDER
MECHANISMAND TRIMCENTERINGFEEL,
AUTOPILOT SERVOSDIRECTIONAL
ACTUATORTRIM
TEMPERATURECOMPENSATIONLINKAGE
YAW DAMPERSERVOS
RUDDER RATIOCHANGERMECHANISM
UPPERPCA
RUDDERHINGEFITTING(REF)
CENTERPCA
LOWERPCA
RUDDER POSITIONTRANSMITTER
YAW DAMPERMECHANISM
FIN REARSPAR (REF)
.
g62720af B767 − Electrical / Instrument Book 11 − Page 235RUDDER SYSTEM OPERATION
(Continued)

LAS
TP
AG
E