Embed Size (px)
Citation preview
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-00
6.1 6.1 ThresholdingThresholding6.2 Edge-based 6.2 Edge-based segmentationsegmentation6.3 Region-based 6.3 Region-based segmentationsegmentation6.4 Matching6.4 Matching6.5 Evaluation issues in 6.5 Evaluation issues in segmentationsegmentation
Chapter 6 Chapter 6 ––Segmentation ISegmentation I
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-11
Image segmentation The main goal of image segmentation is to divide an image into parts that have
a strong correlation with objects or areas of the real world depicted in theimage.
Segmentation methods can be divided into three groups: thresholding,edgebased segmentation and region-based segmentation.
Each region can be represented by its closed boundary, and each closedboundary describes a region.
Image data ambiguity is one of the main segmentation problems, oftenaccompanied by information noise.
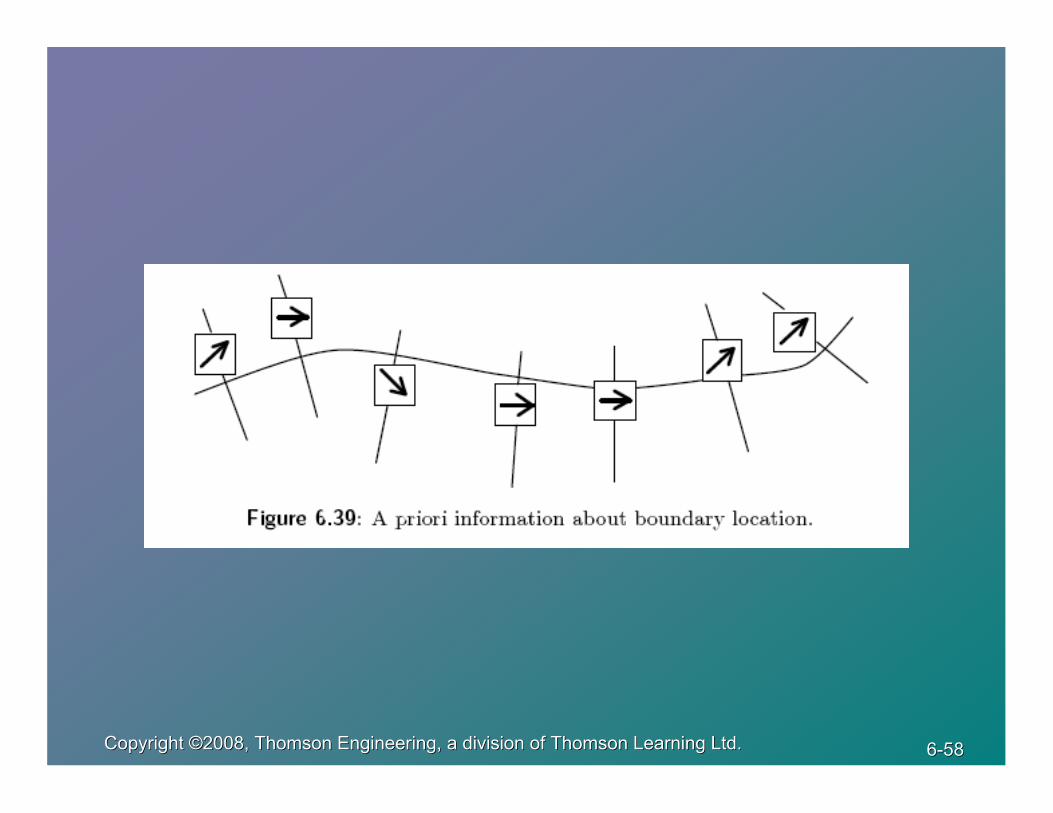
The more a priori information is available to the segmentation process, thebetter the segmentation results that can be obtained.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-22
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-33
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-44
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-55
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-66
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-77
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-88
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-99
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1010
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1111
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1212
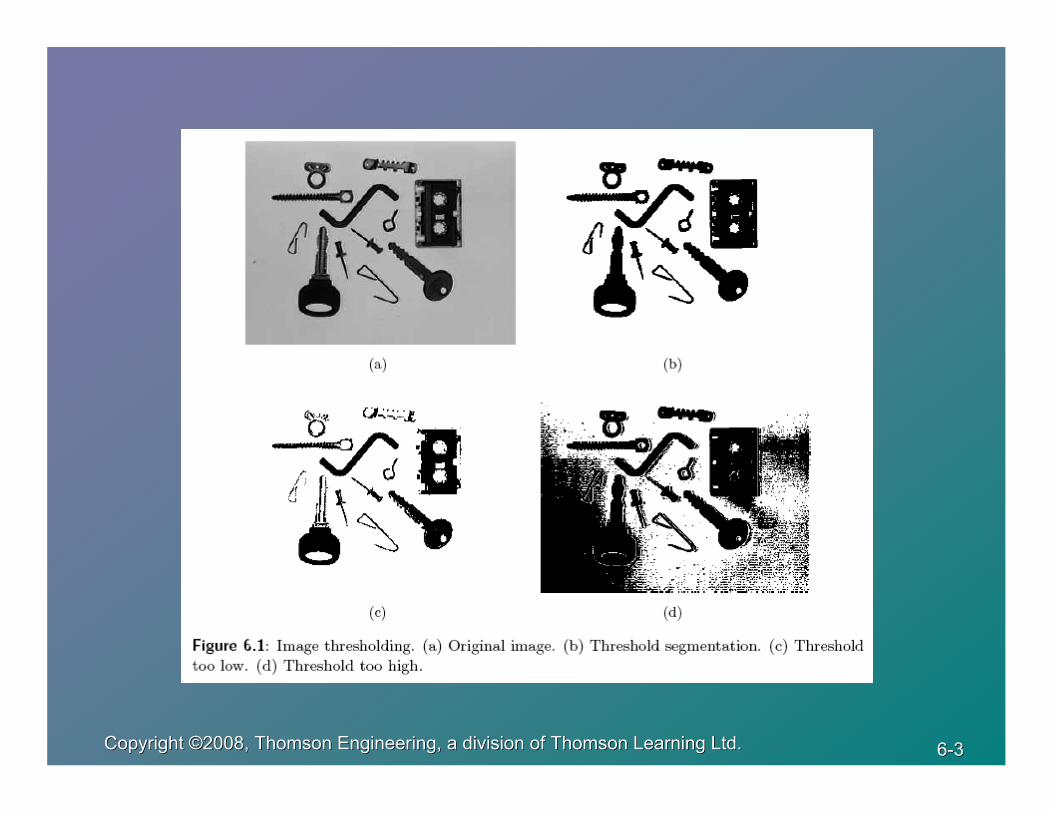
SummaryThresholding Thresholding represents the simplest image segmentation process, and it is
computationally inexpensive and fast. A brightness constant called athreshold is used to segment objects and background.
Single thresholds can either be applied to the entire image (global threshold)or can vary in image parts (local threshold). Only under very unusualcircumstances can thresholding be successful using a single threshold for thewhole image.
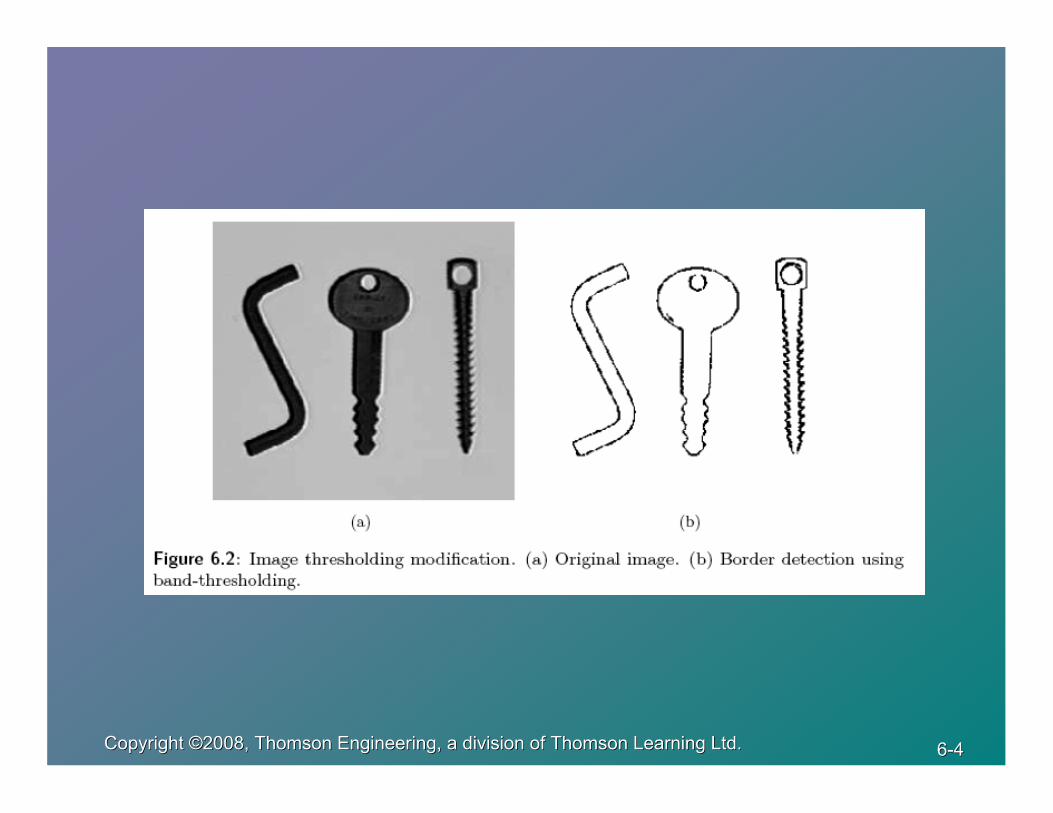
Many modifications of thresholding exist: local thresholding, bandthresholding, semi-thresholding, multi-thresholding, etc.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1313
SummaryThresholding cont. Threshold detection methods are used to determine the threshold
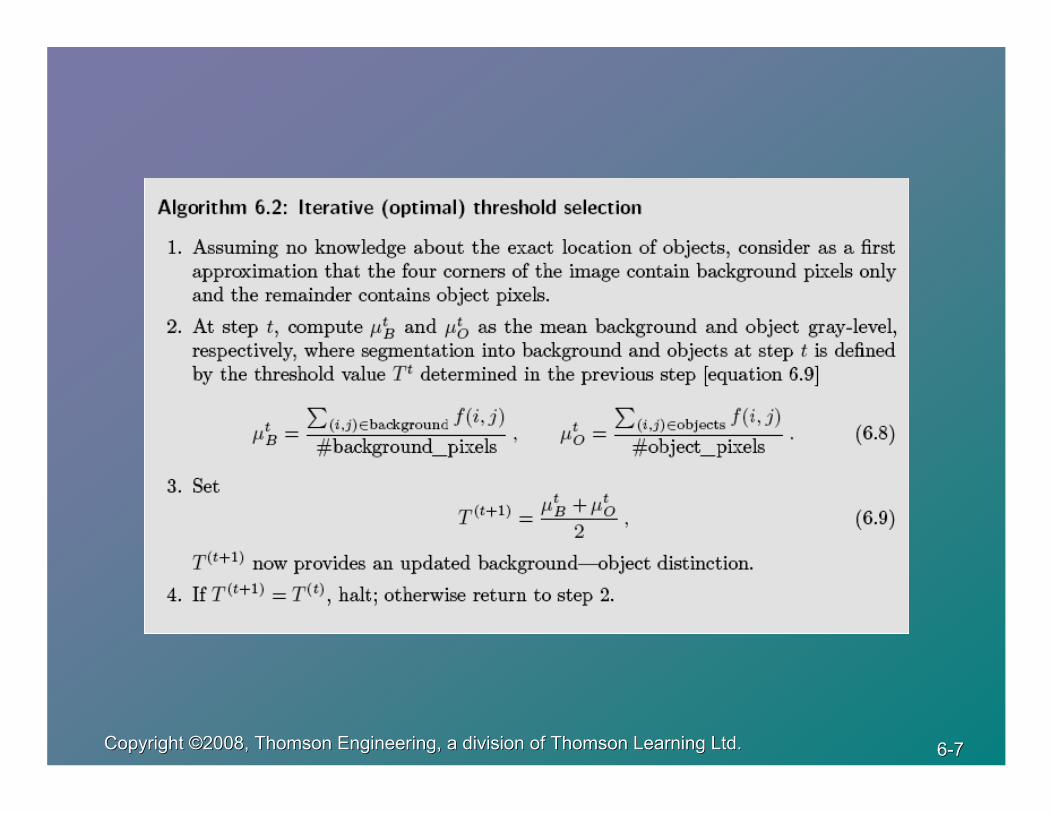
automatically. If some property of an image after segmentation is known apriori, the task of threshold detection is simplified, since the threshold can beselected to ensure that this property is satisfied. Threshold detection can usep-tile thresholding, histogram shape analysis, optimal thresholding, etc.
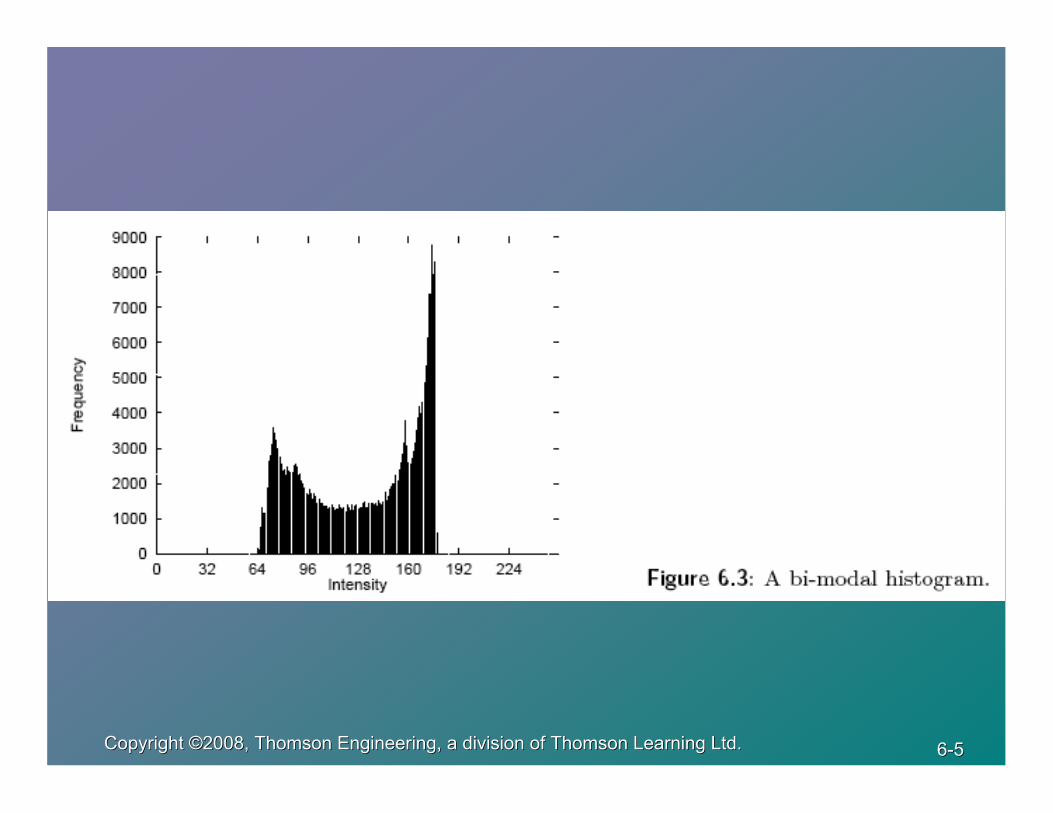
In bi-modal histograms, the threshold can be determined as a minimumbetween the two highest local maxima.
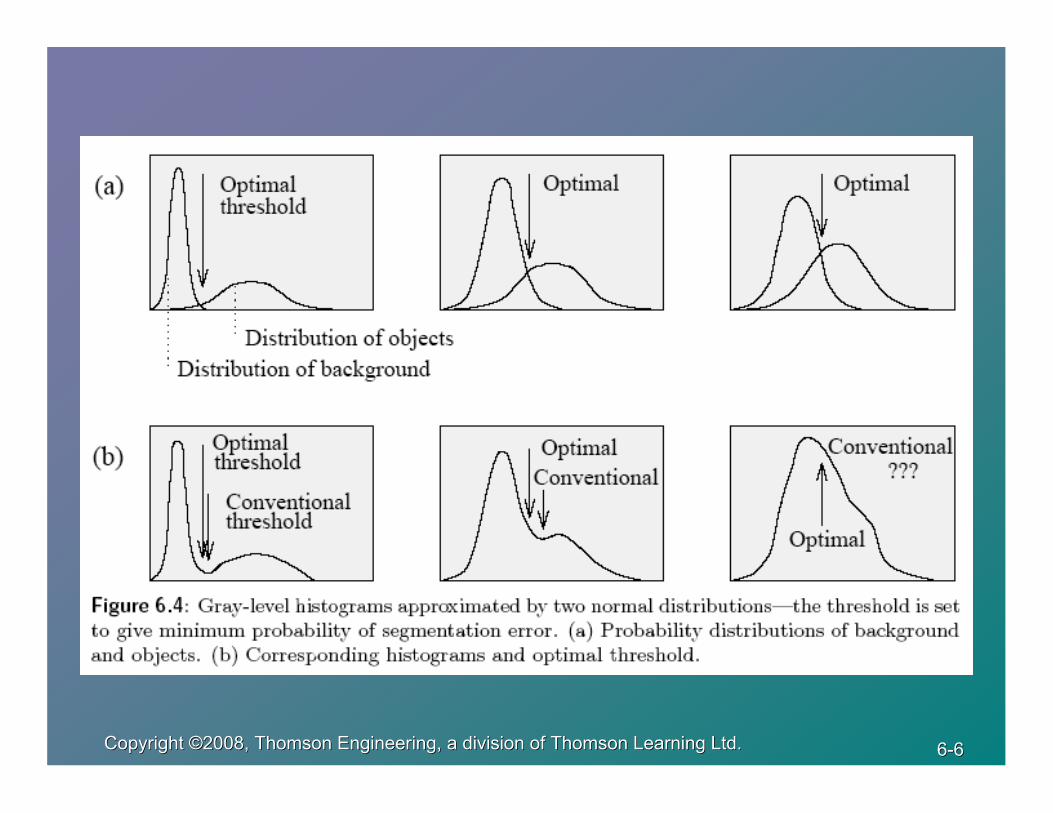
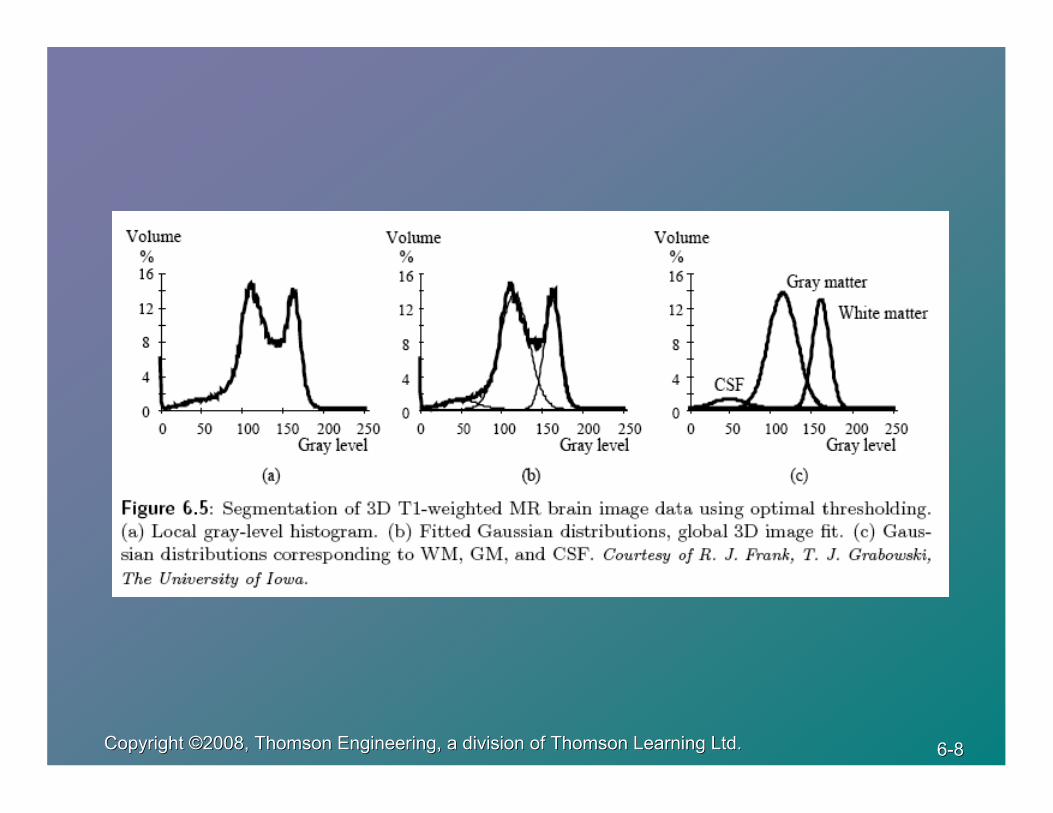
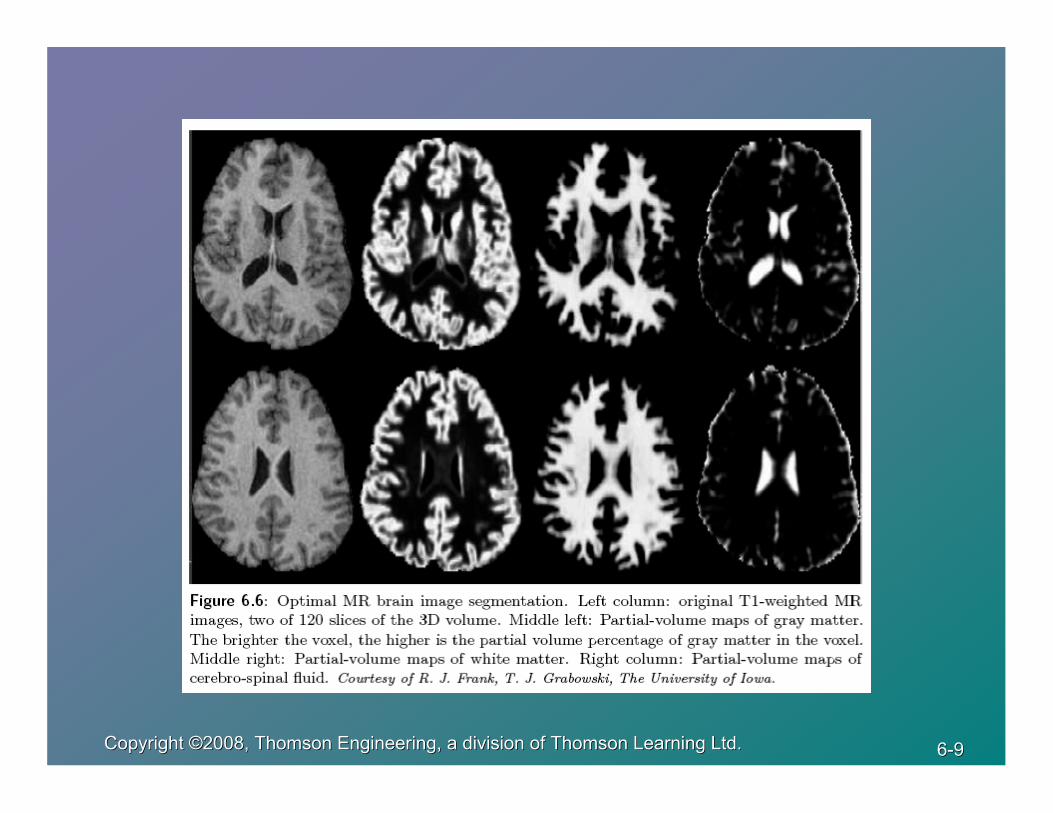
Optimal thresholding determines the threshold as the closest gray-levelcorresponding to the minimum probability between the maxima of two or morenormal distributions. Such thresholding results in minimum error segmentation.
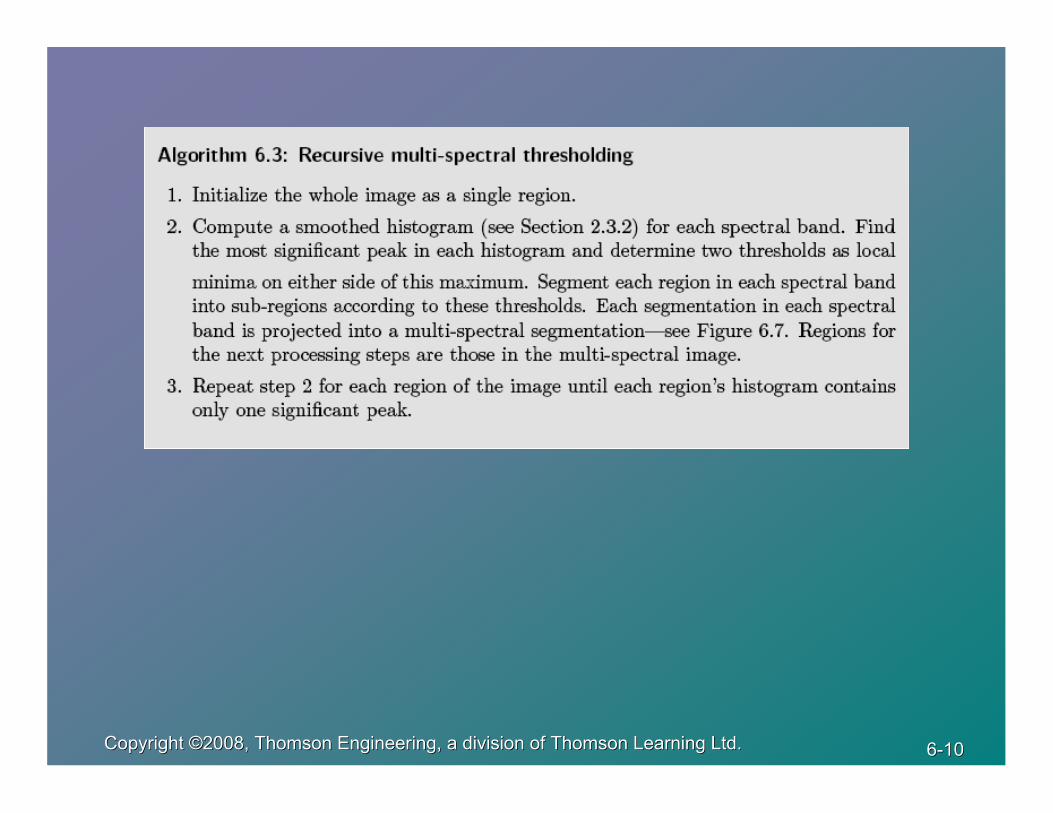
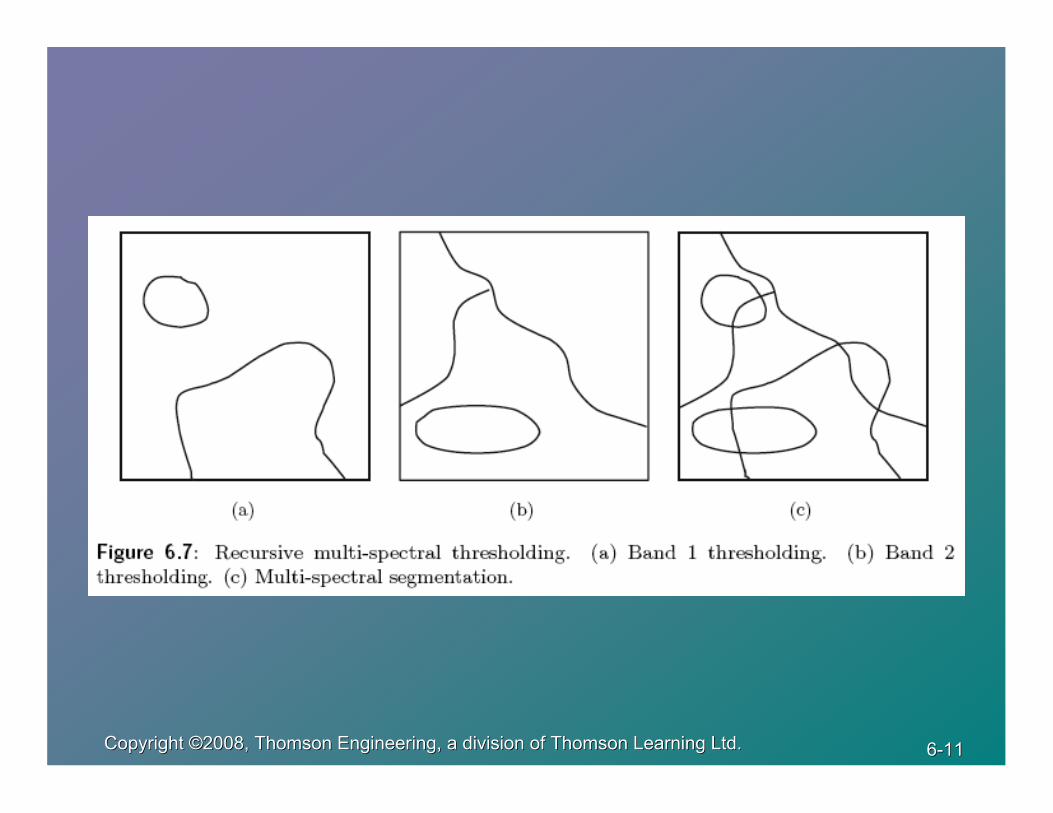
Multi-spectral thresholding is appropriate for color or multi-band images.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1414
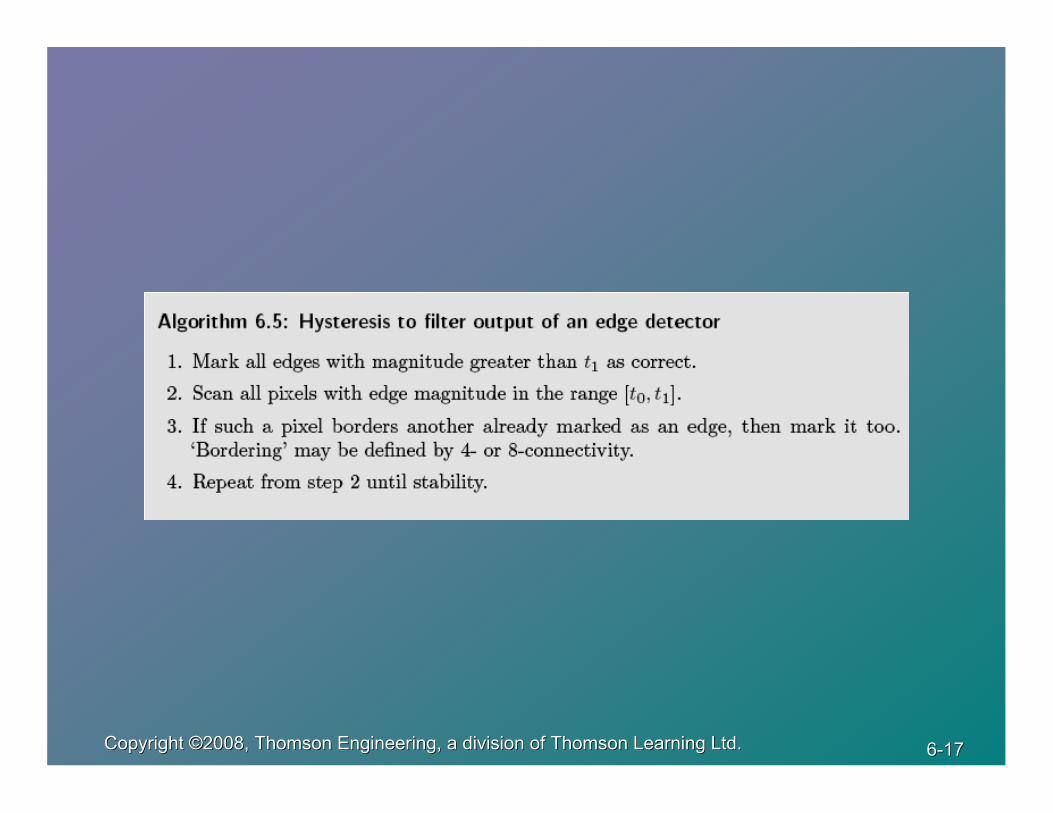
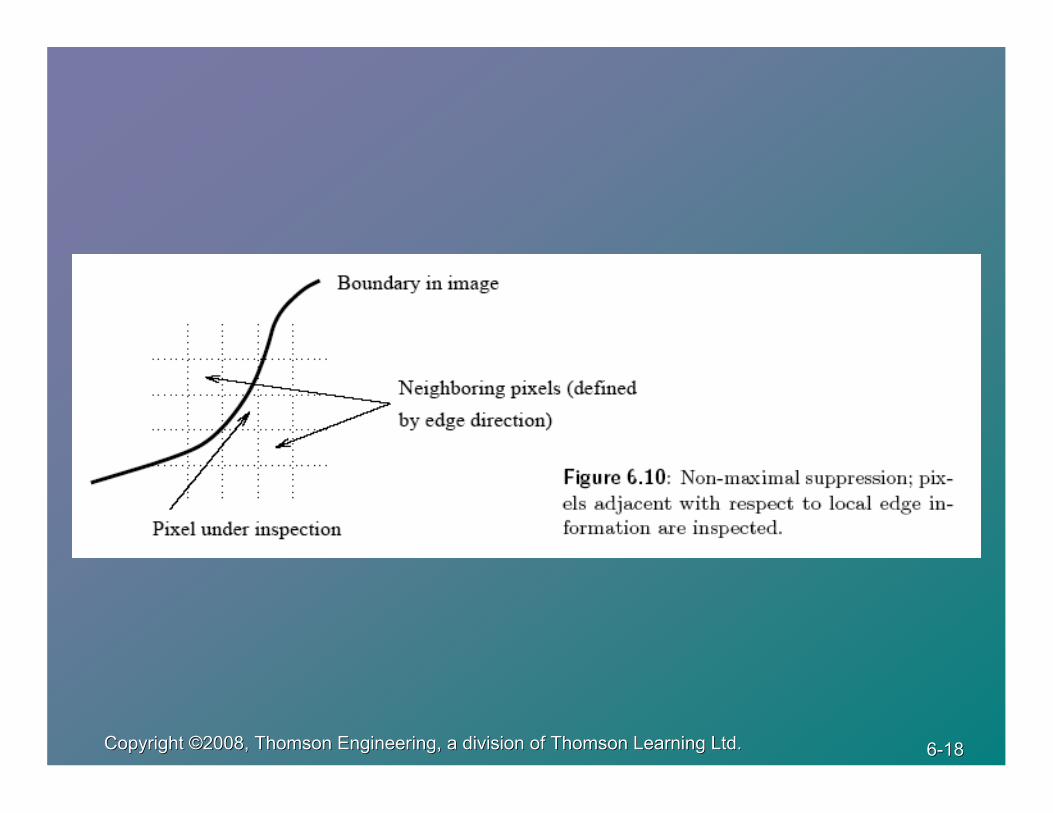
Non-maximum suppression
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1515
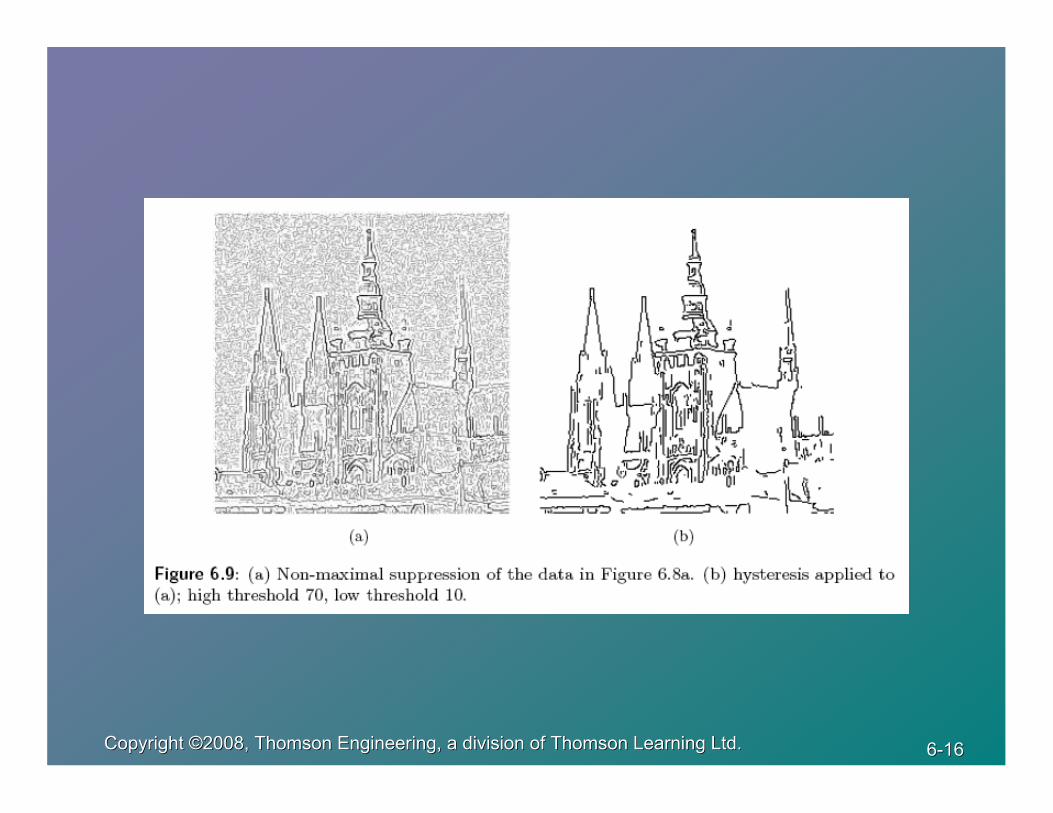
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1616
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1717
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1818
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-1919
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2020
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2121
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2222
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2323
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2424
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2525
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2626
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2727
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2828
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-2929
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3030
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3131
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3232
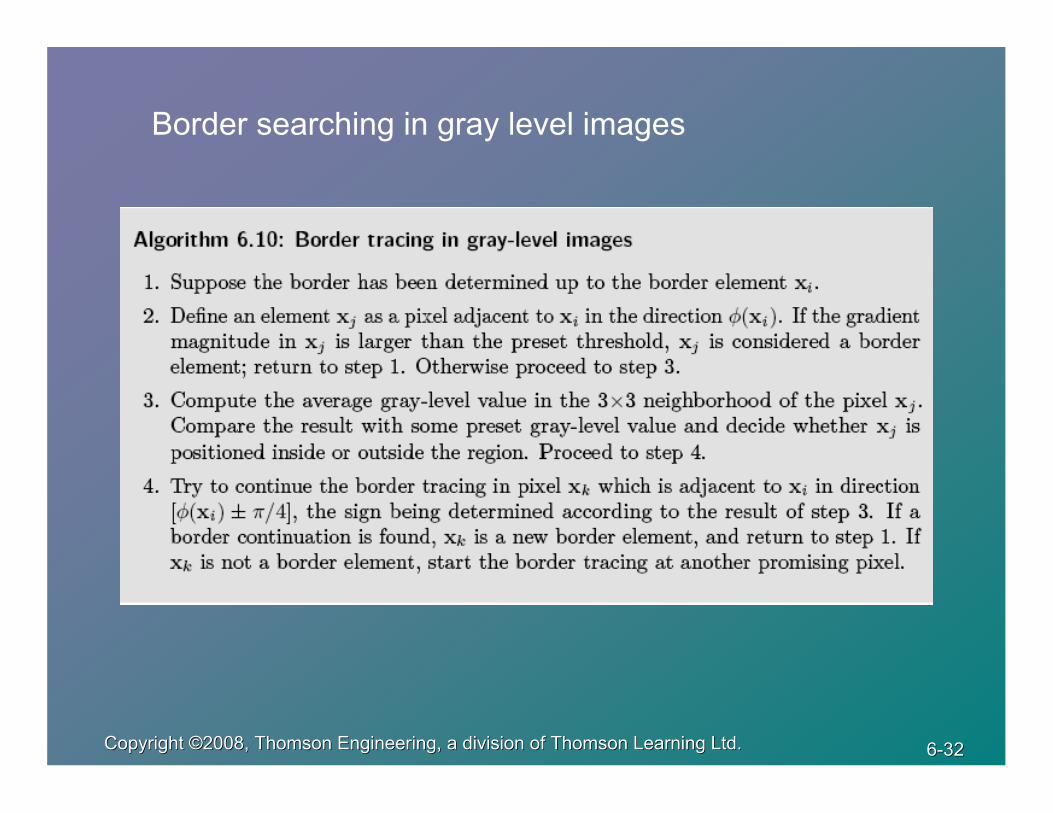
Border searching in gray level images
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3333
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3434
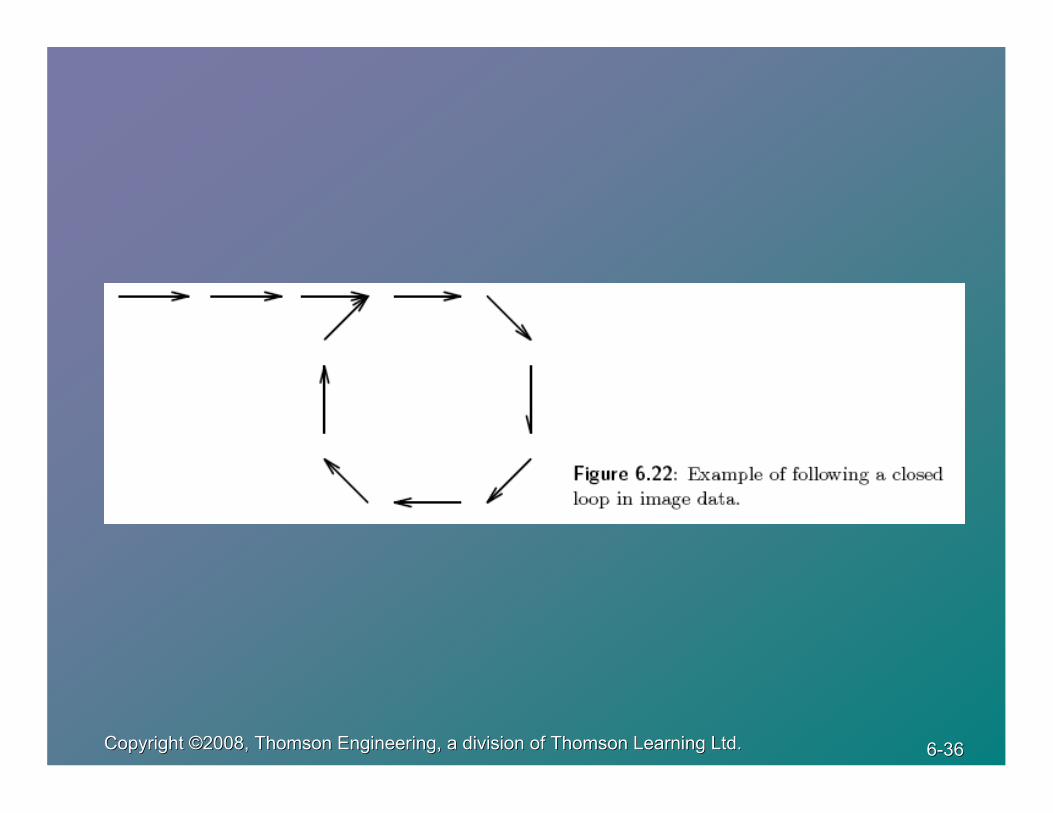
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3535
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3636
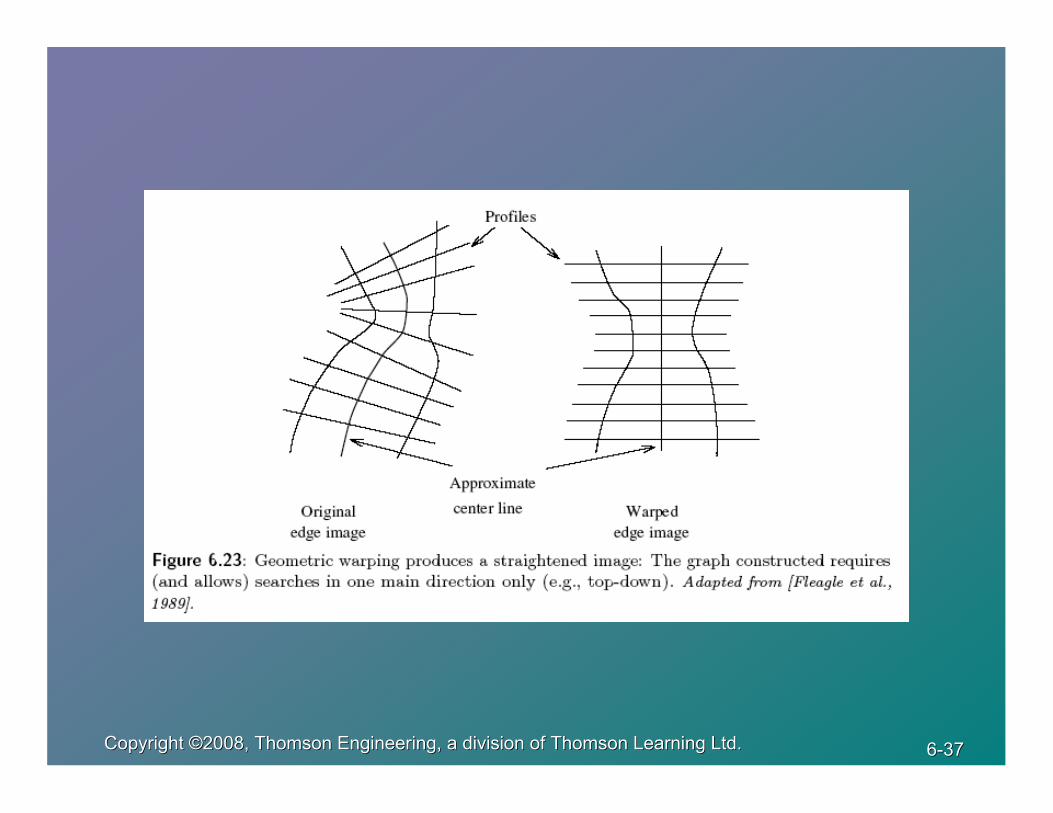
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3737
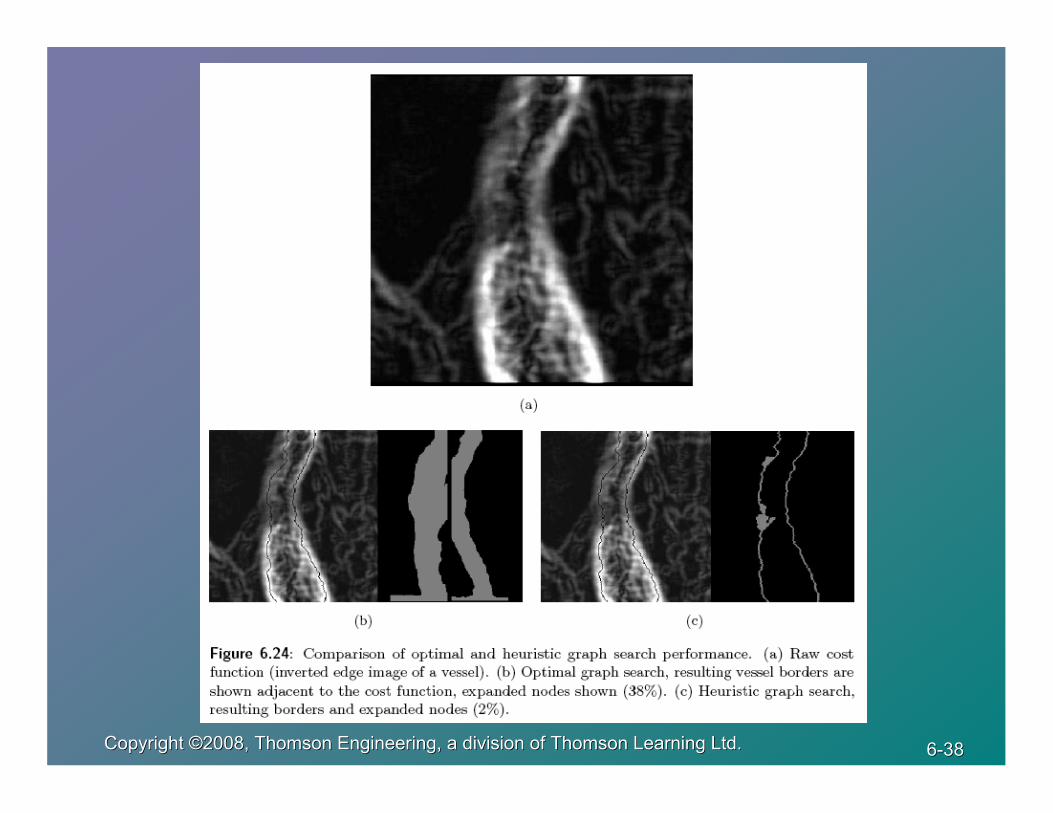
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3838
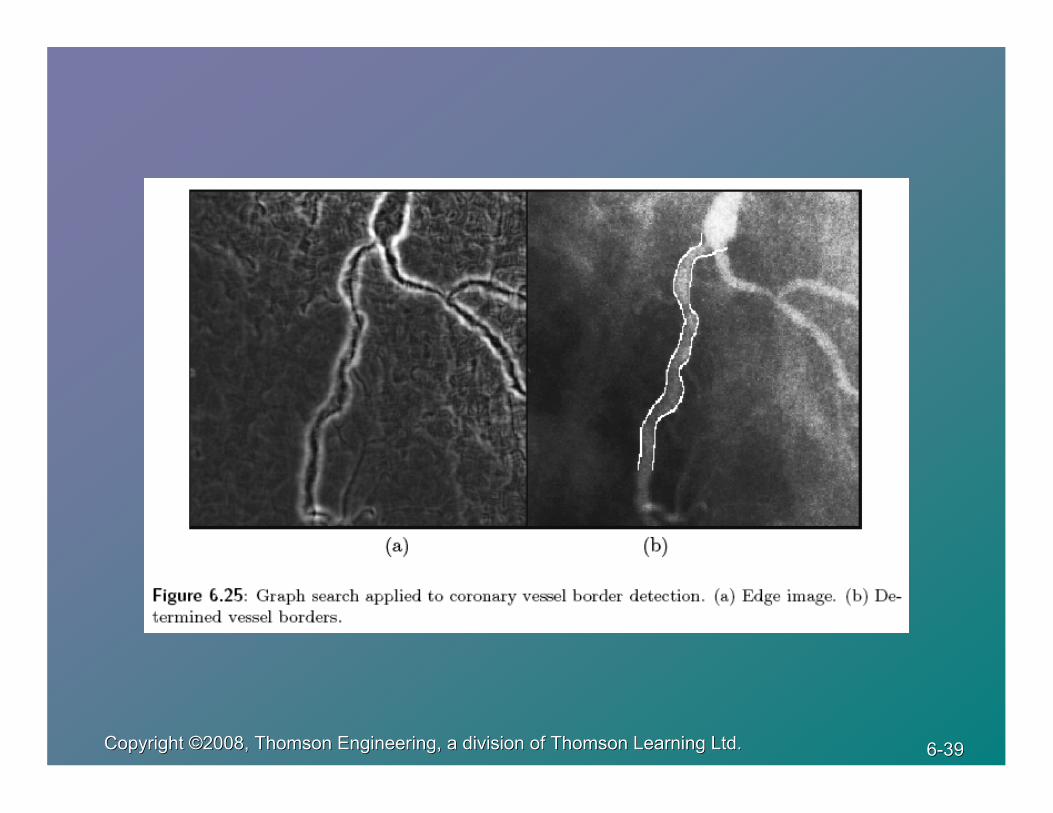
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-3939
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4040
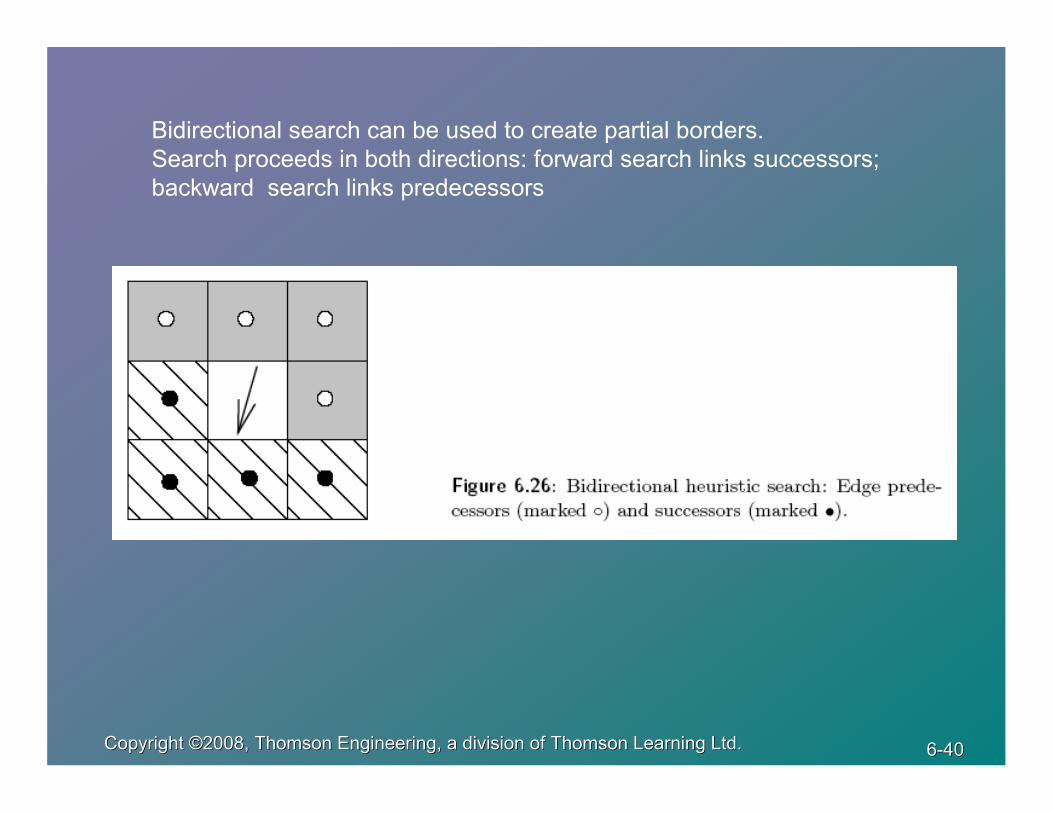
Bidirectional search can be used to create partial borders. Search proceeds in both directions: forward search links successors; backward search links predecessors
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4141
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4242
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4343
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4444
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4545
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4646
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4747
Dpboundary_demo; cd 06Segm1
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4848
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-4949
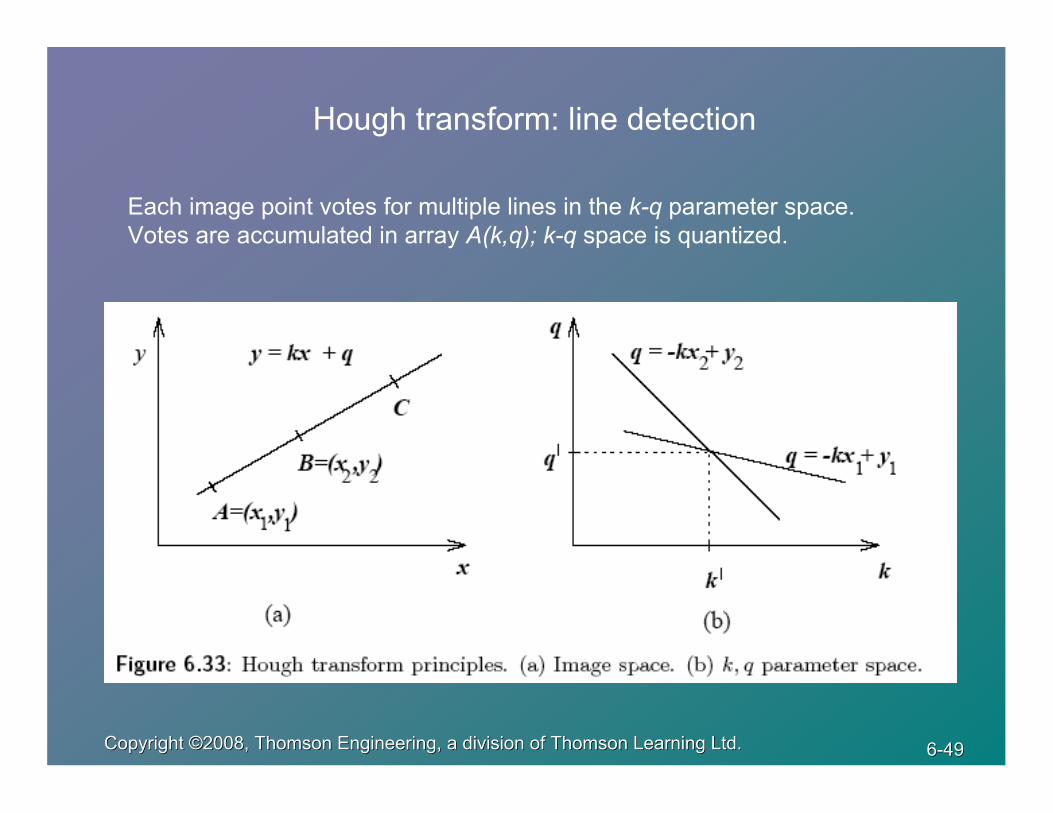
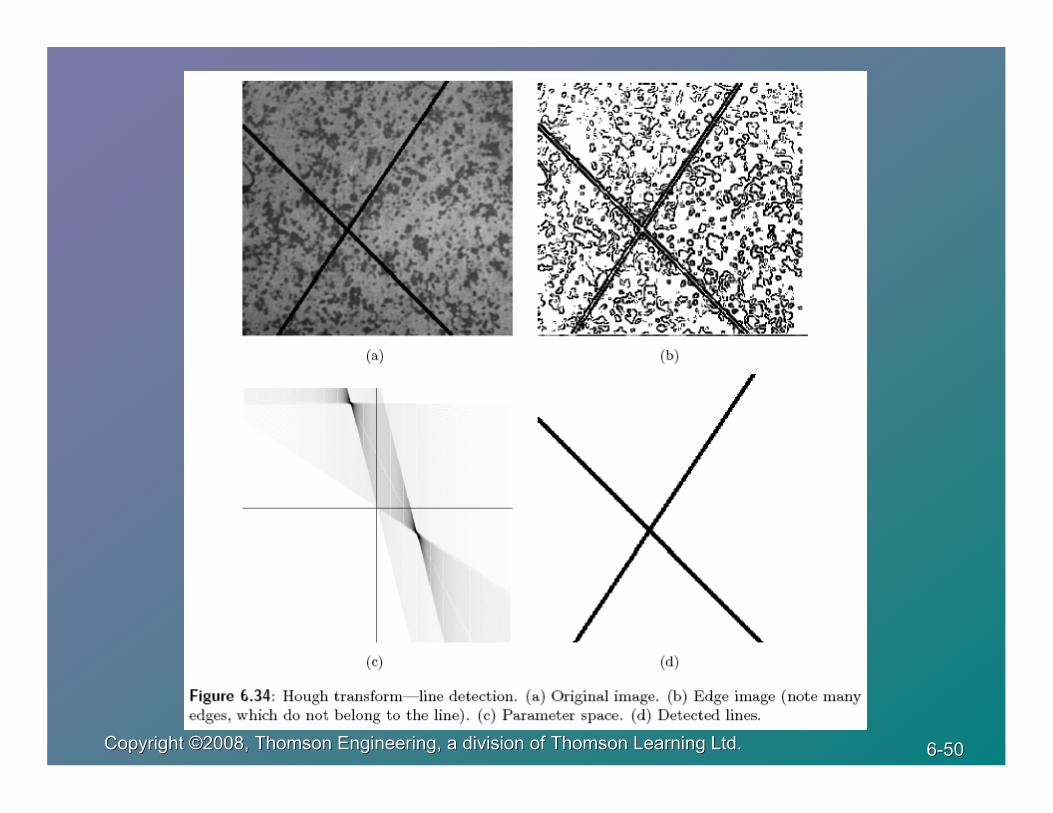
Hough transform: line detection
Each image point votes for multiple lines in the k-q parameter space. Votes are accumulated in array A(k,q); k-q space is quantized.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5050
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5151
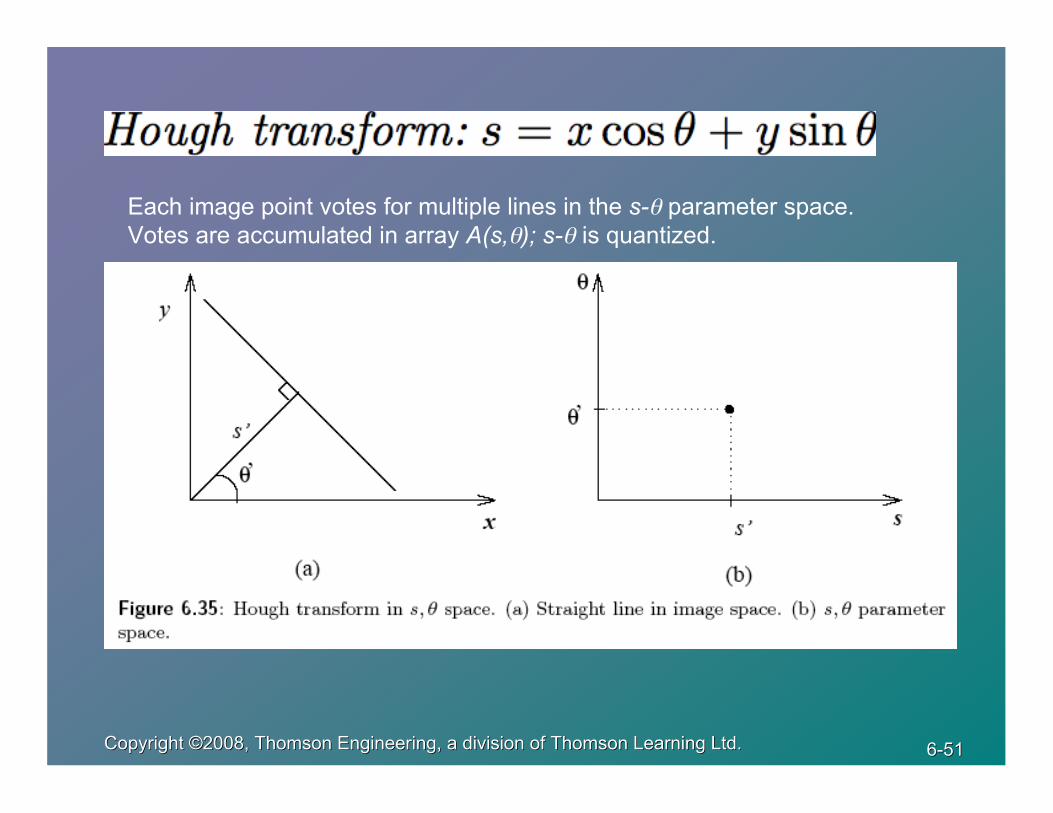
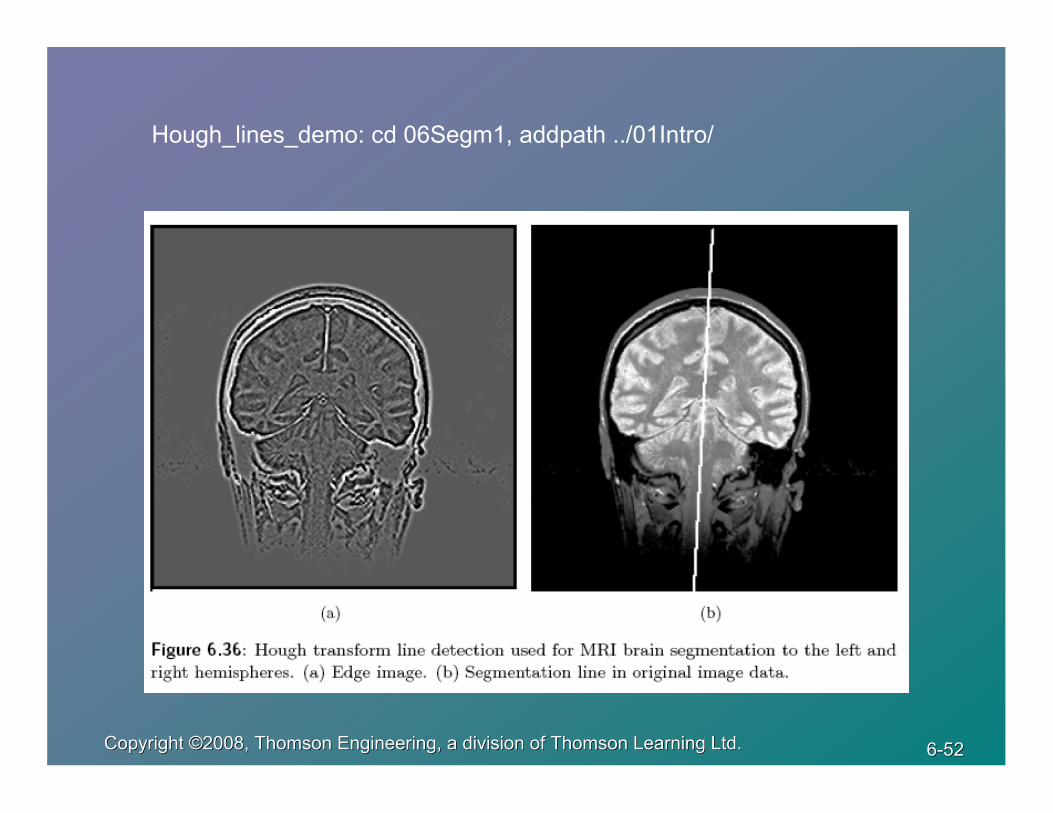
Each image point votes for multiple lines in the s-θ parameter space. Votes are accumulated in array A(s,θ); s-θ is quantized.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5252
Hough_lines_demo: cd 06Segm1, addpath ../01Intro/
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5353
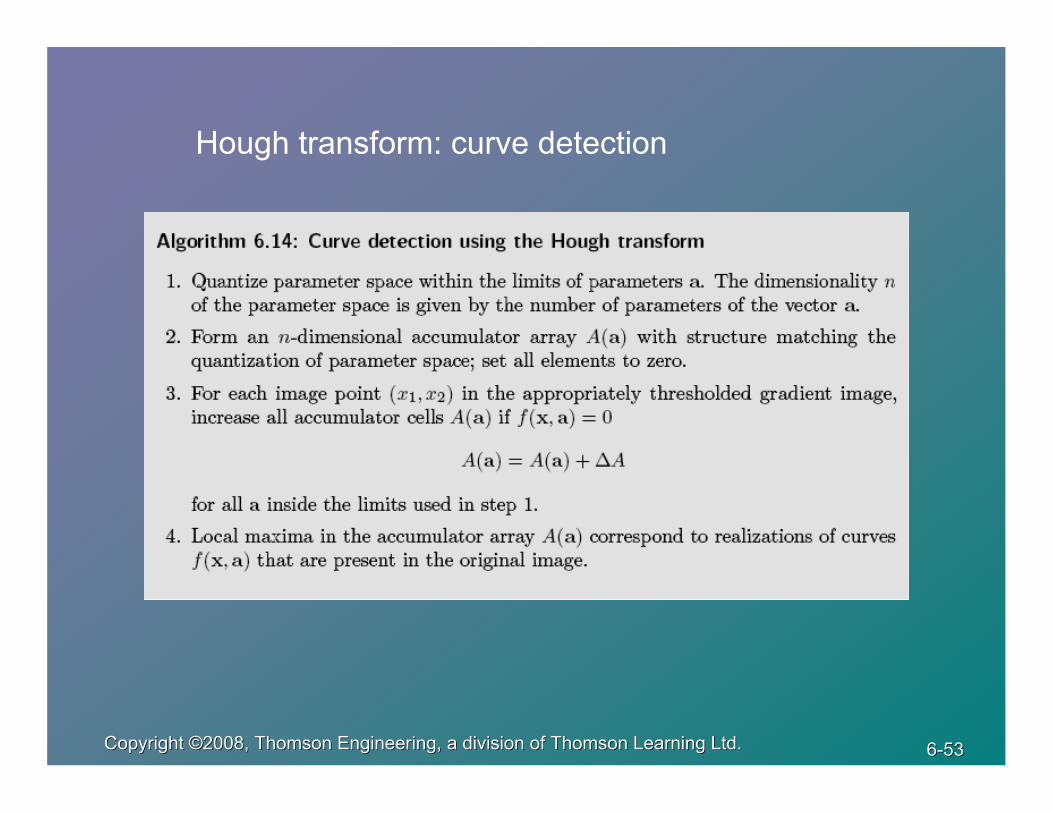
Hough transform: curve detection
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5454
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5555
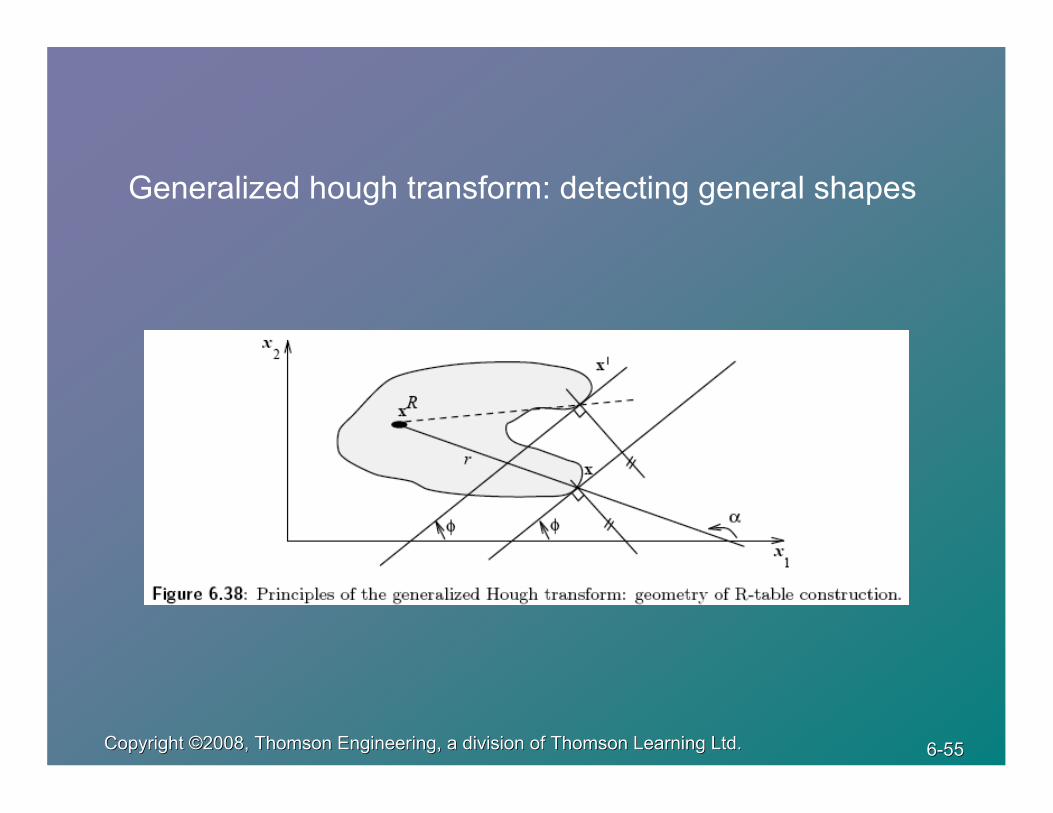
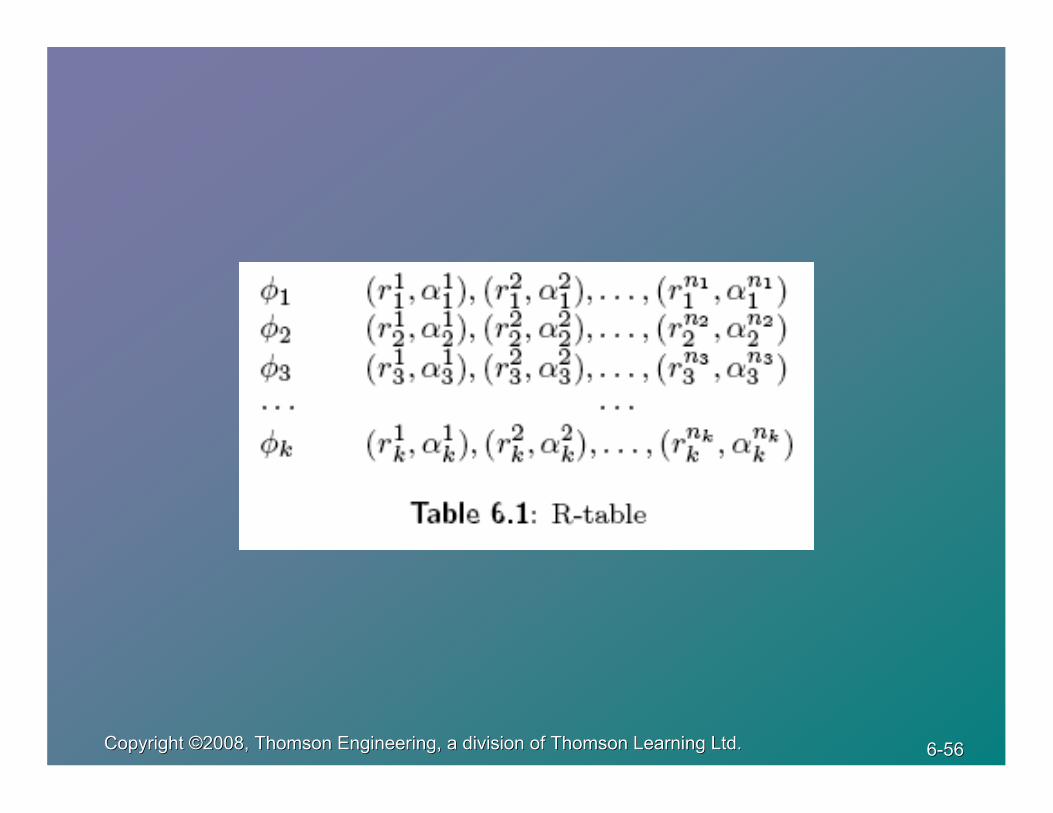
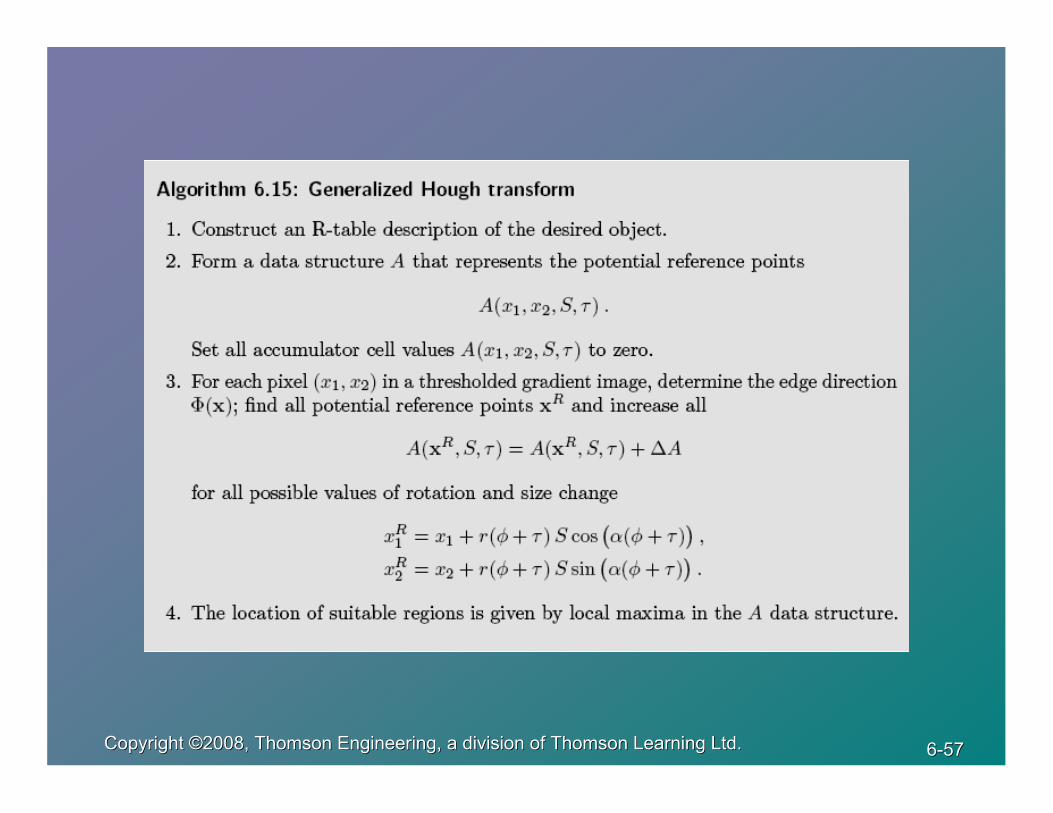
Generalized hough transform: detecting general shapes
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5656
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5757
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5858
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-5959
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6060
SummaryEdge-based image segmentation Edge-based segmentation relies on edges found in an image by edge
detecting operators—these edges mark image locations of discontinuities ingray-level, color, texture, etc.
The most common problems of edge-based segmentation, caused by imagenoise or unsuitable information in an image, are an edge presence in locationswhere there is no border, and no edge presence where a real border exists.
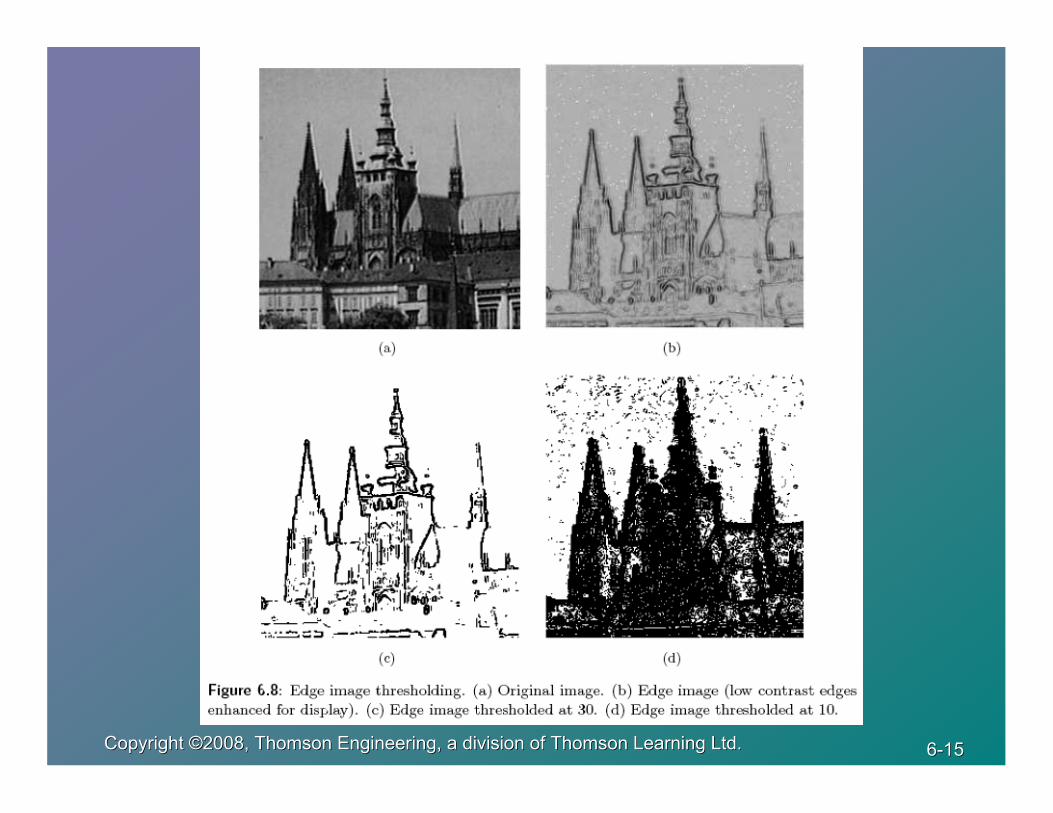
Edge image thresholding is based on construction of an edge image that isprocessed by an appropriate threshold.
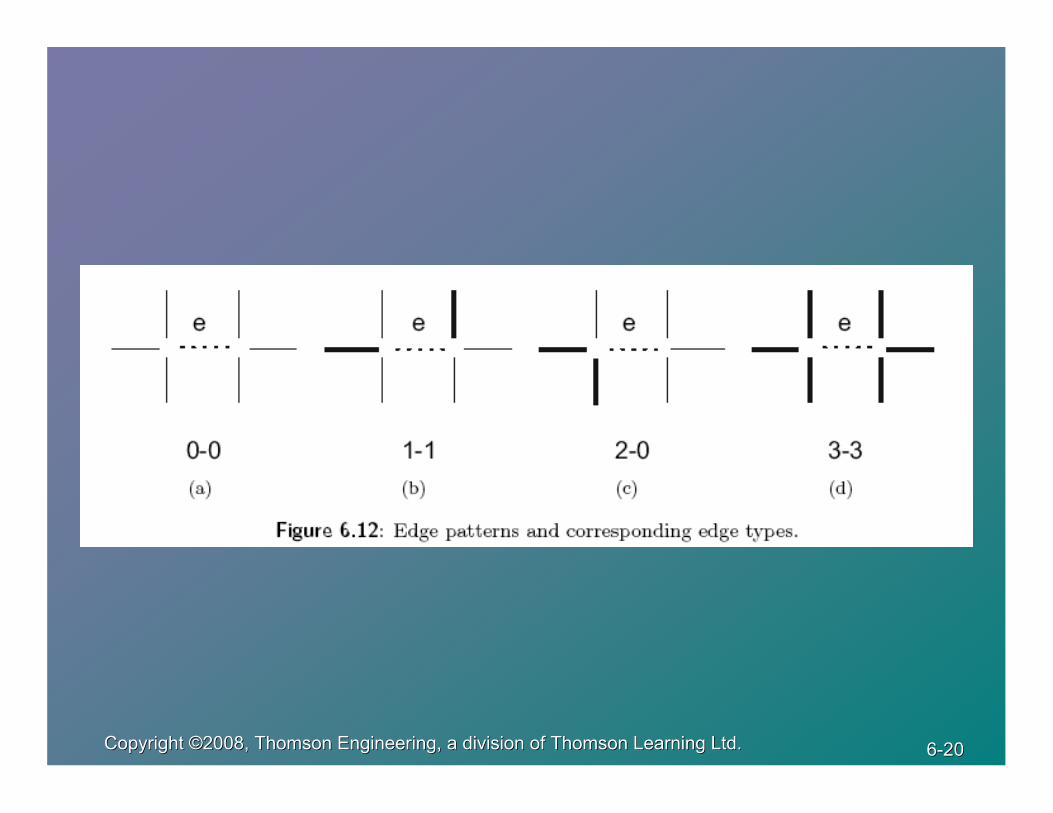
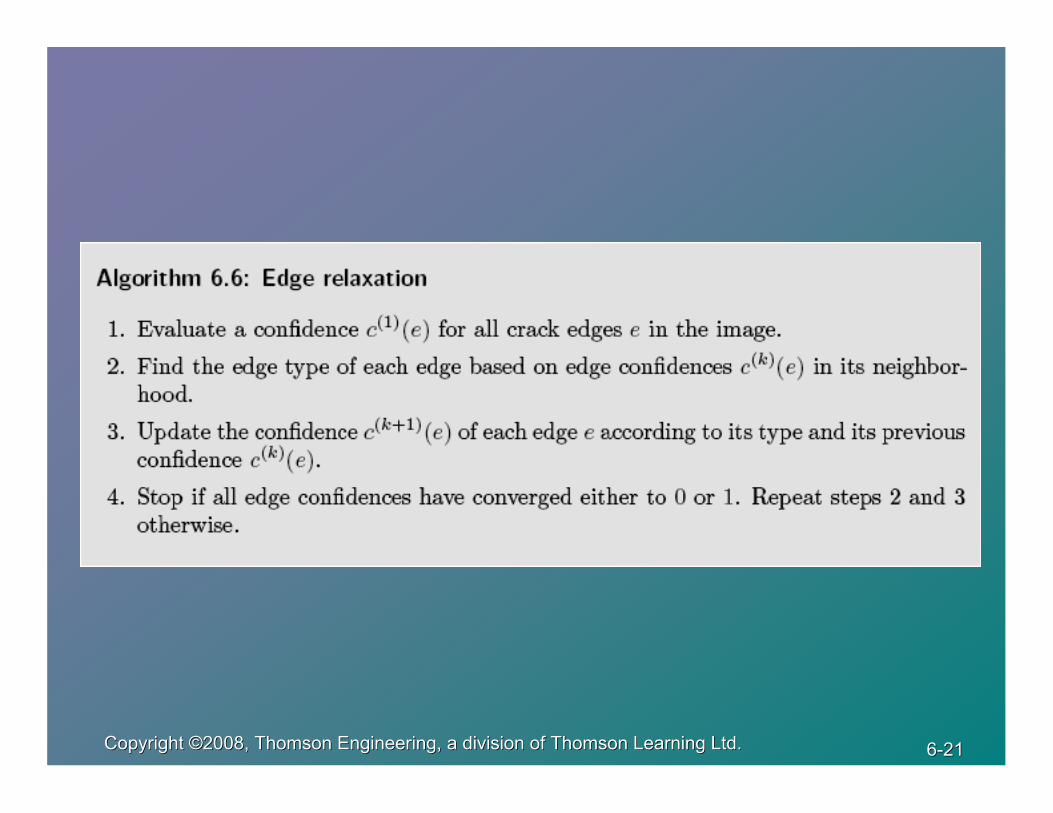
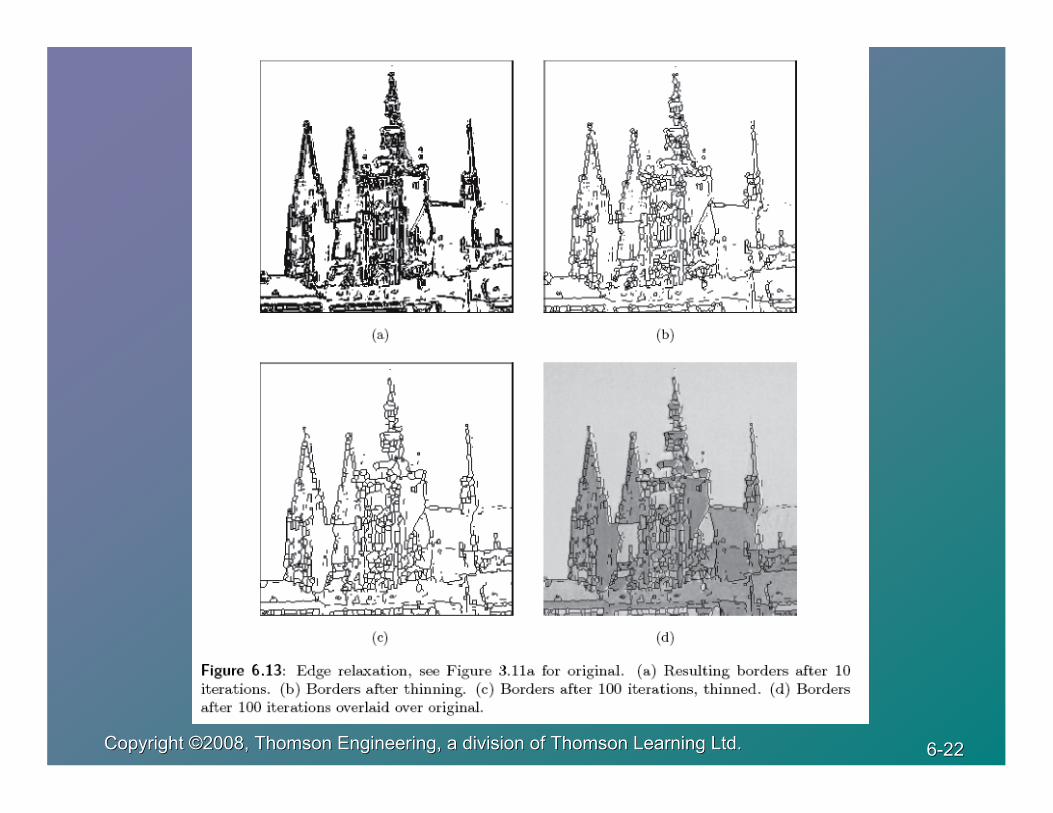
In edge relaxation, edge properties are considered in the context ofneighboring edges. If sufficient evidence of the border presence exists, localedge strength increases and vice versa. Using a global relaxation(optimization) process, continuous borders are constructed.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6161
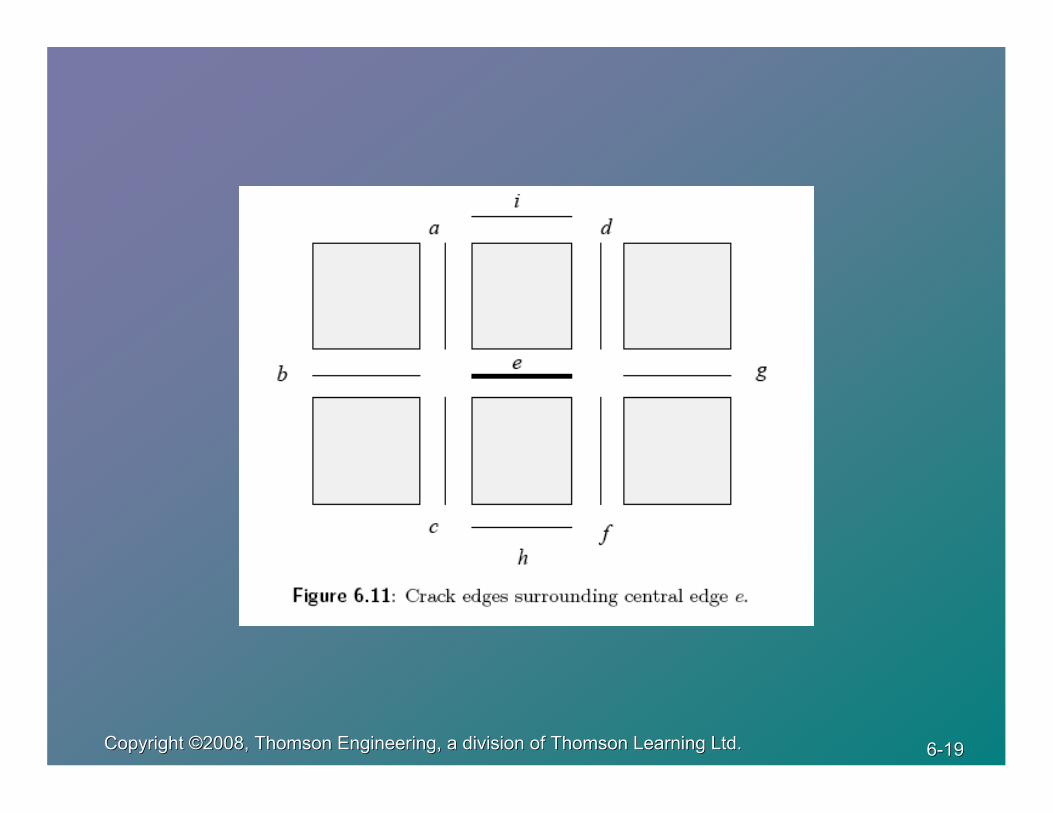
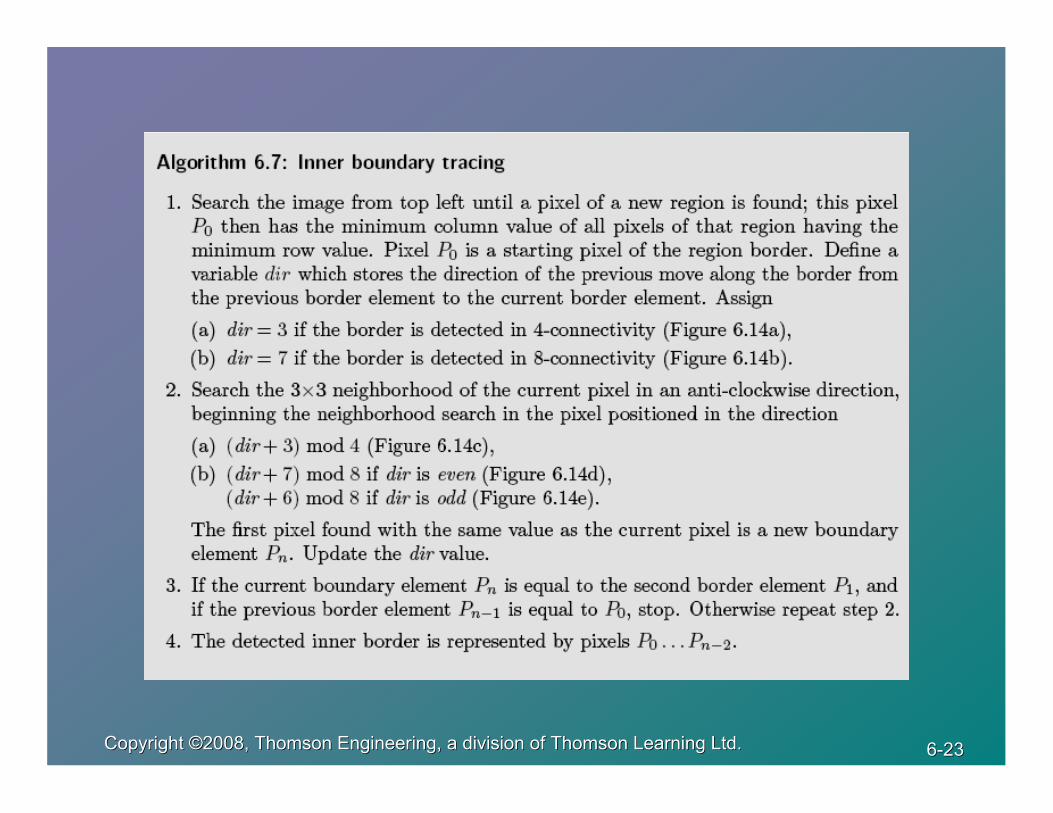
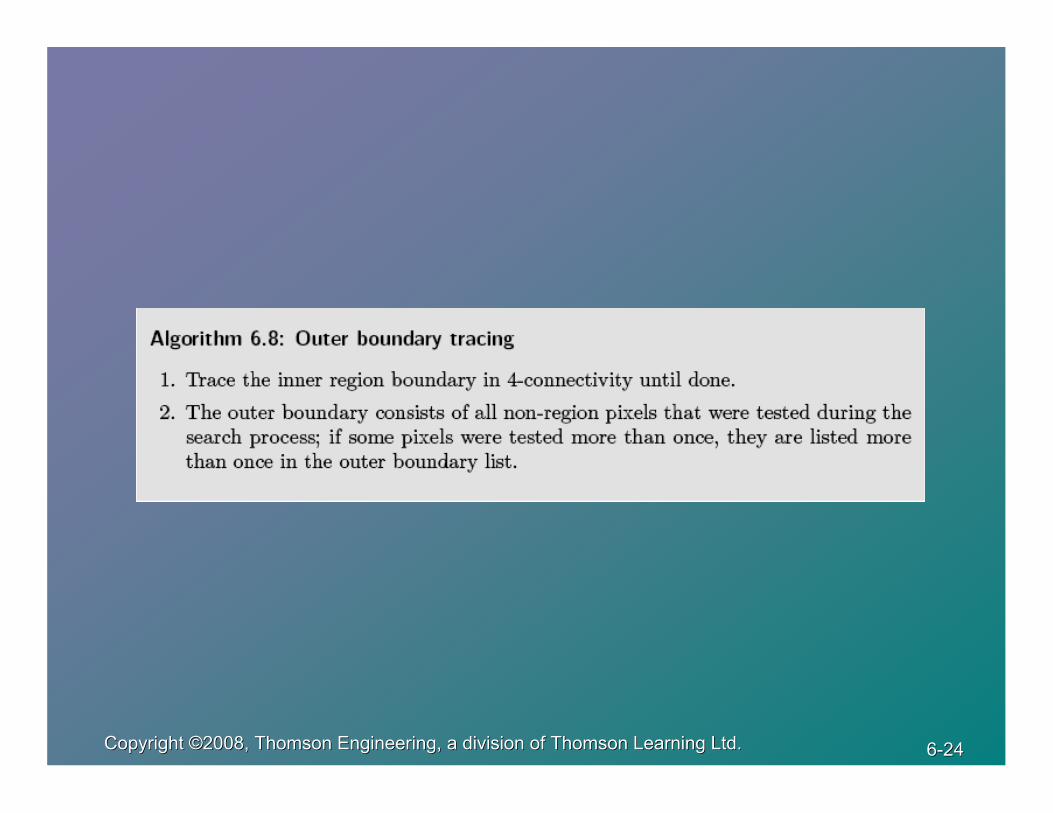
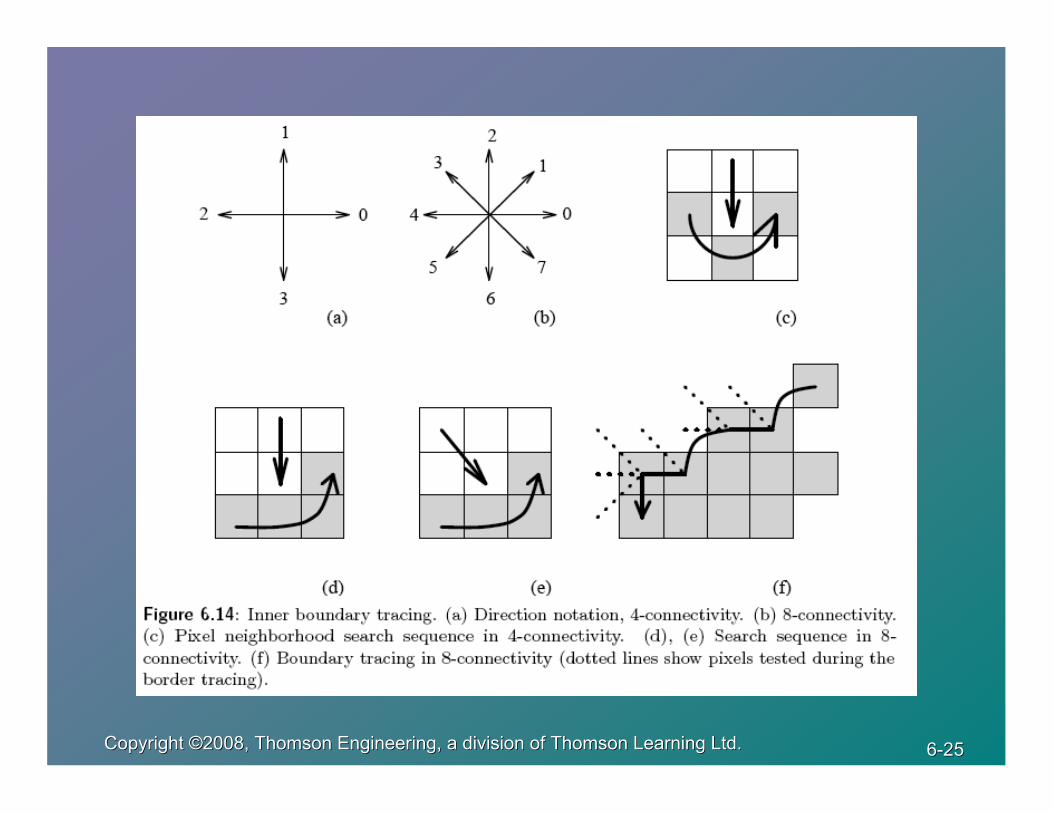
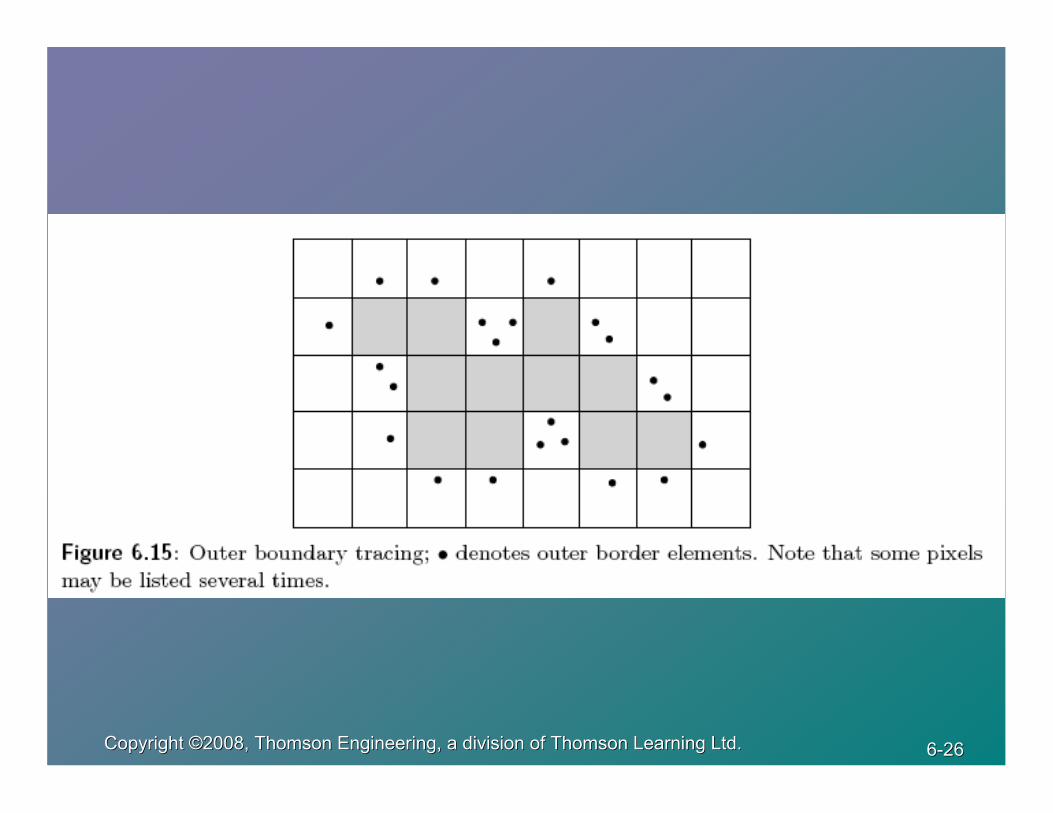
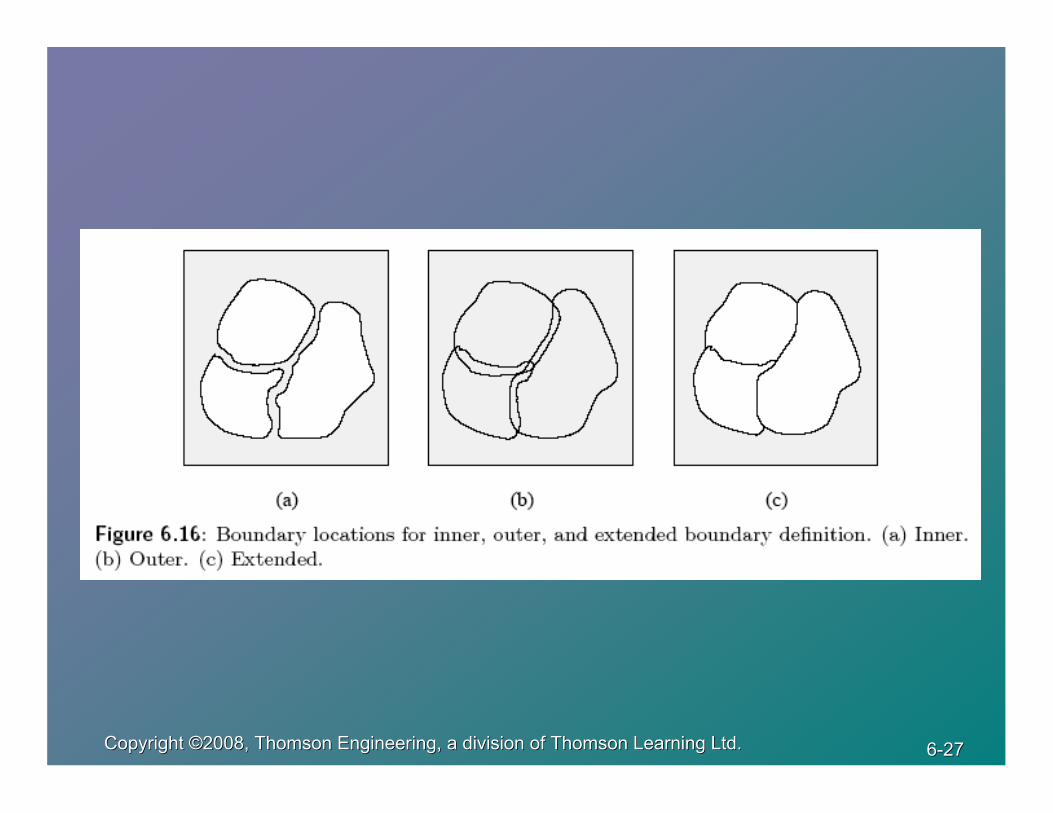
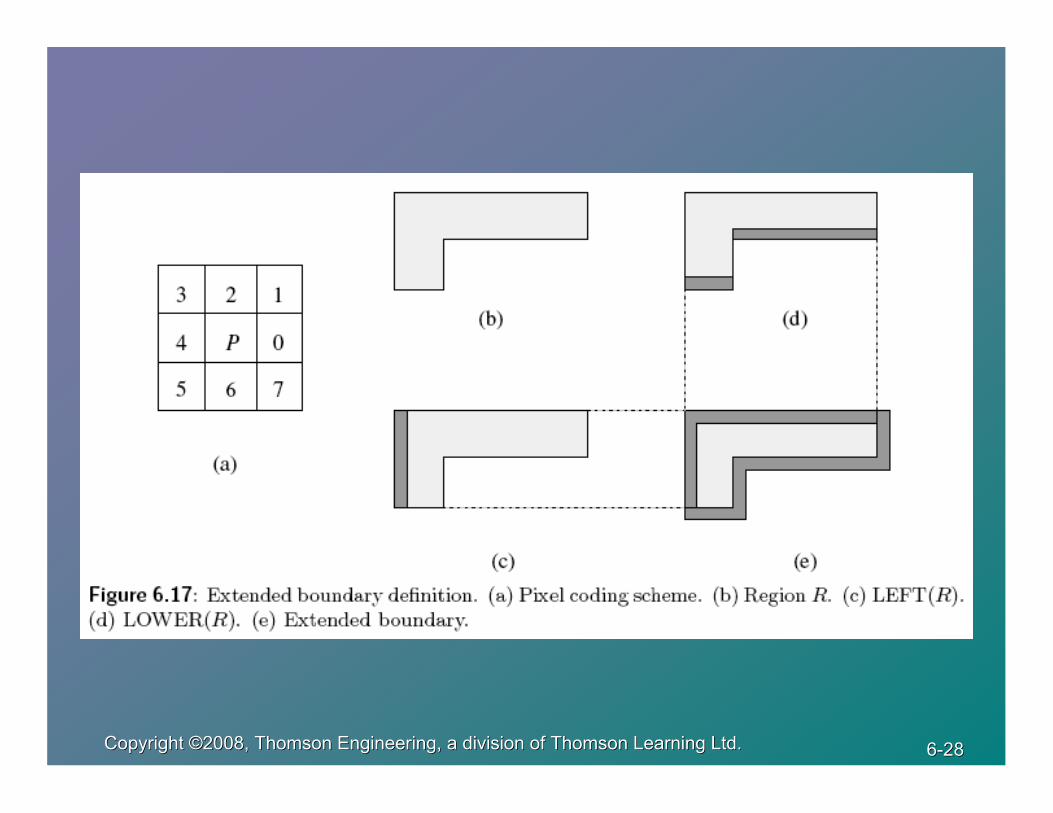
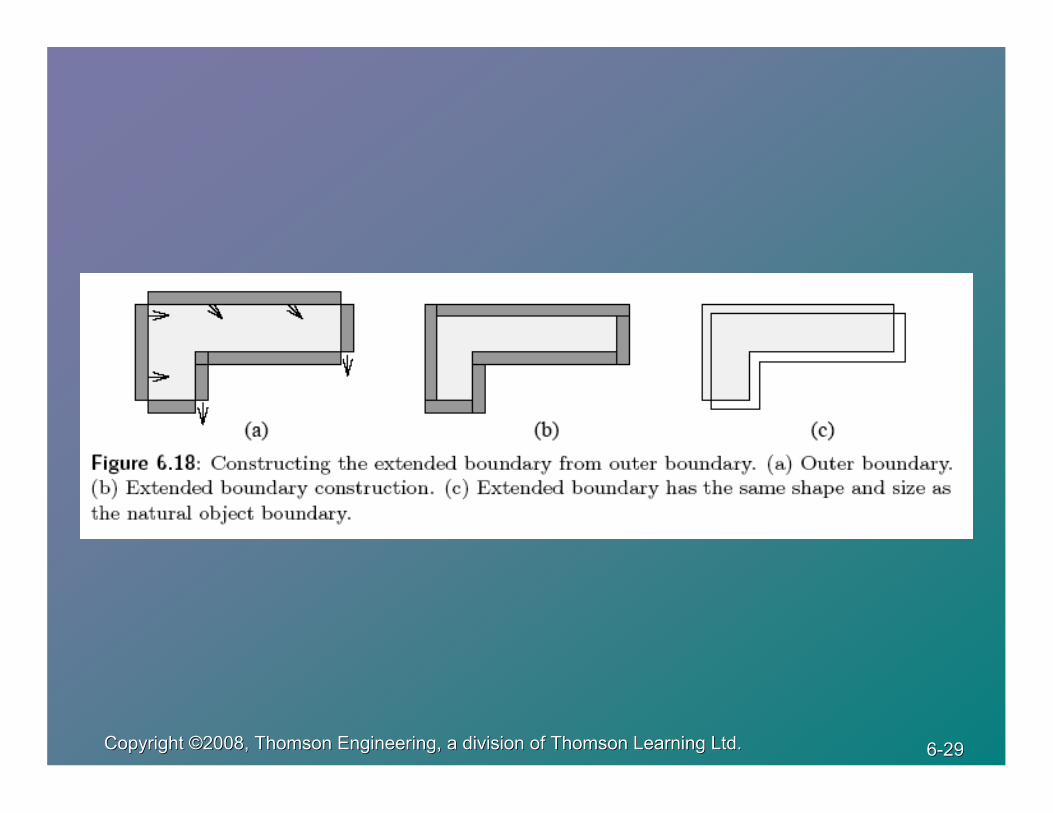
SummaryEdge-based image segmentation cont. Three types of region borders may be formed: inner, outer, and extended. The inner
border is always part of a region, but the outer border never is. Therefore, using inner orouter border definition, two adjacent regions never have a common border. Extendedborders are defined as single common borders between adjacent regions still beingspecified by standard pixel co-ordinates.
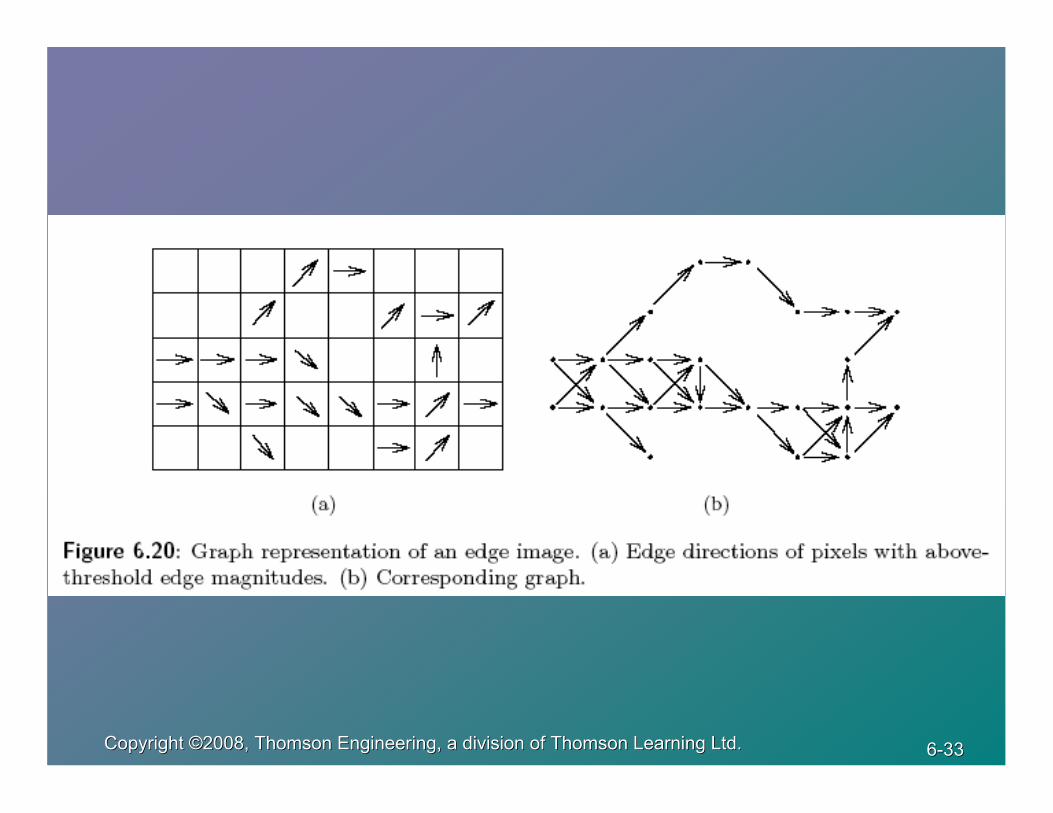
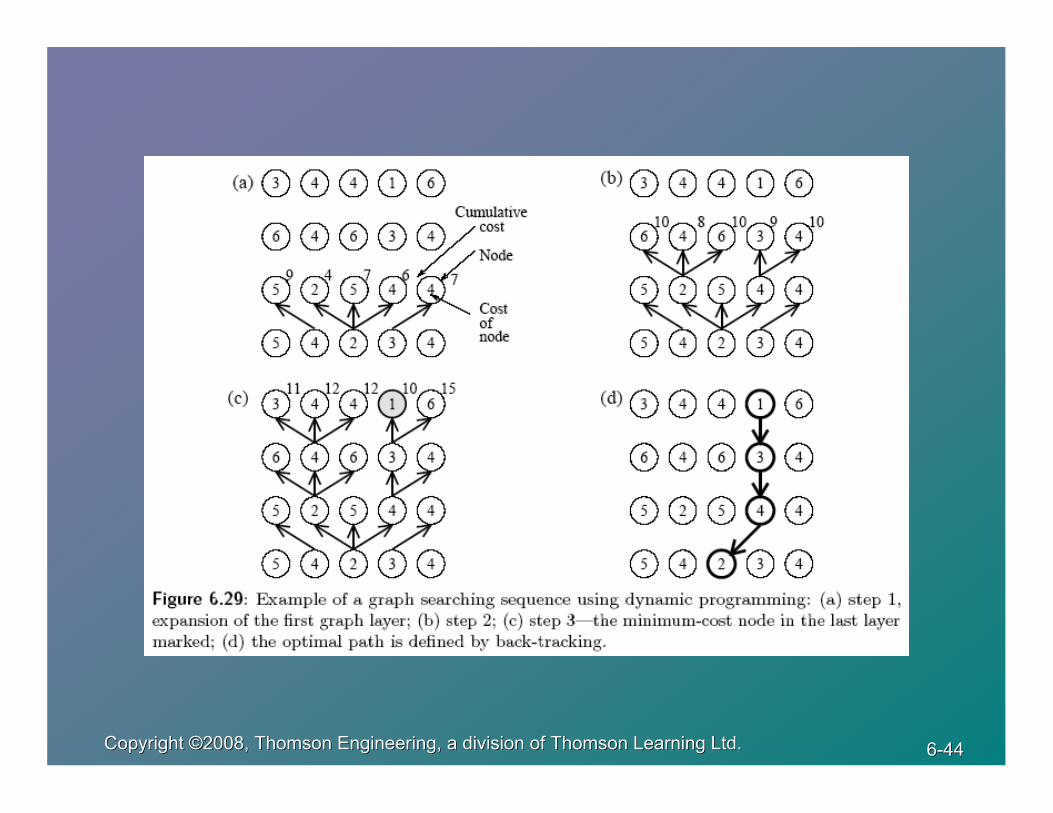
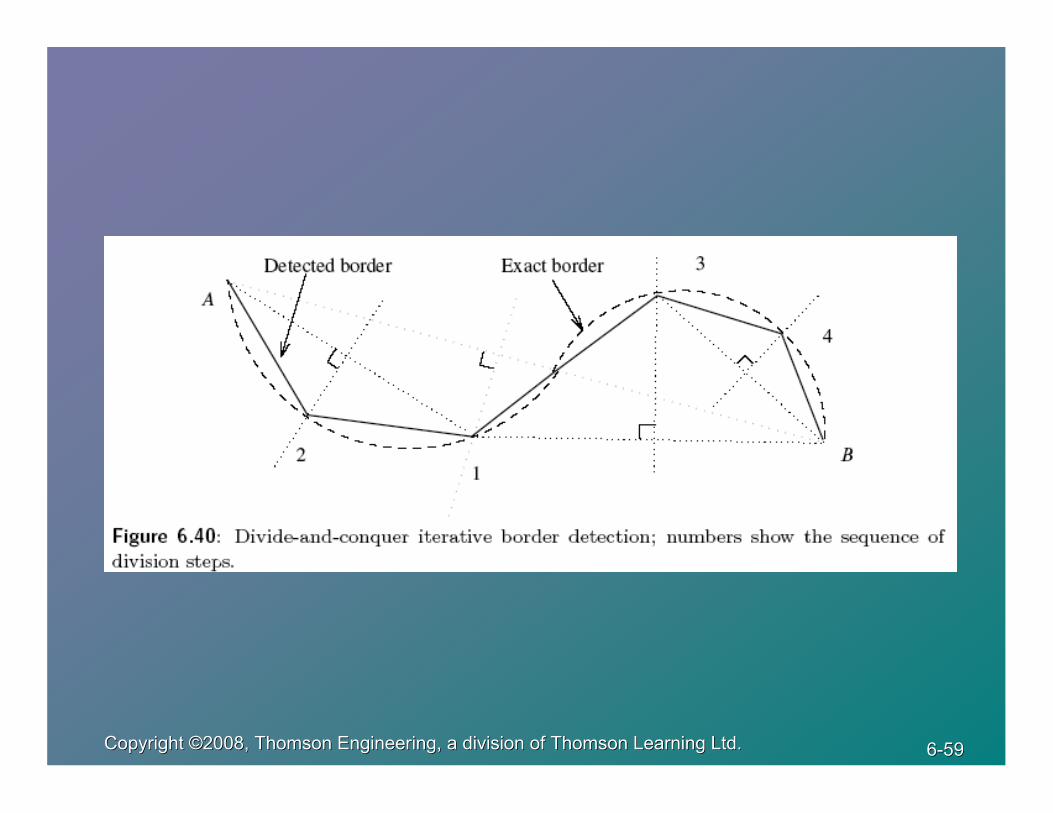
If the criterion of optimality is defined, globally optimal borders can be determined using(heuristic) graph searching or dynamic programming. Graph-searchbased borderdetection represents an extremely powerful segmentation approach. The borderdetection process is transformed into a search for the optimal path in the weighted graph.Costs are associated with each graph node that reflect the likelihood that the borderpasses through the particular node (pixel). The aim is to find the optimal path (optimalborder, with respect to some objective function) that connects two specified nodes orsets of nodes that represent the border’s beginning and end.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6262
SummaryEdge-based image segmentation cont. Cost definition (evaluation functions) is the key to successful border
detection. Cost calculation complexity may range from simple inverted edgestrength to complex representation of a priori knowledge about the soughtborders, segmentation task, image data, etc.
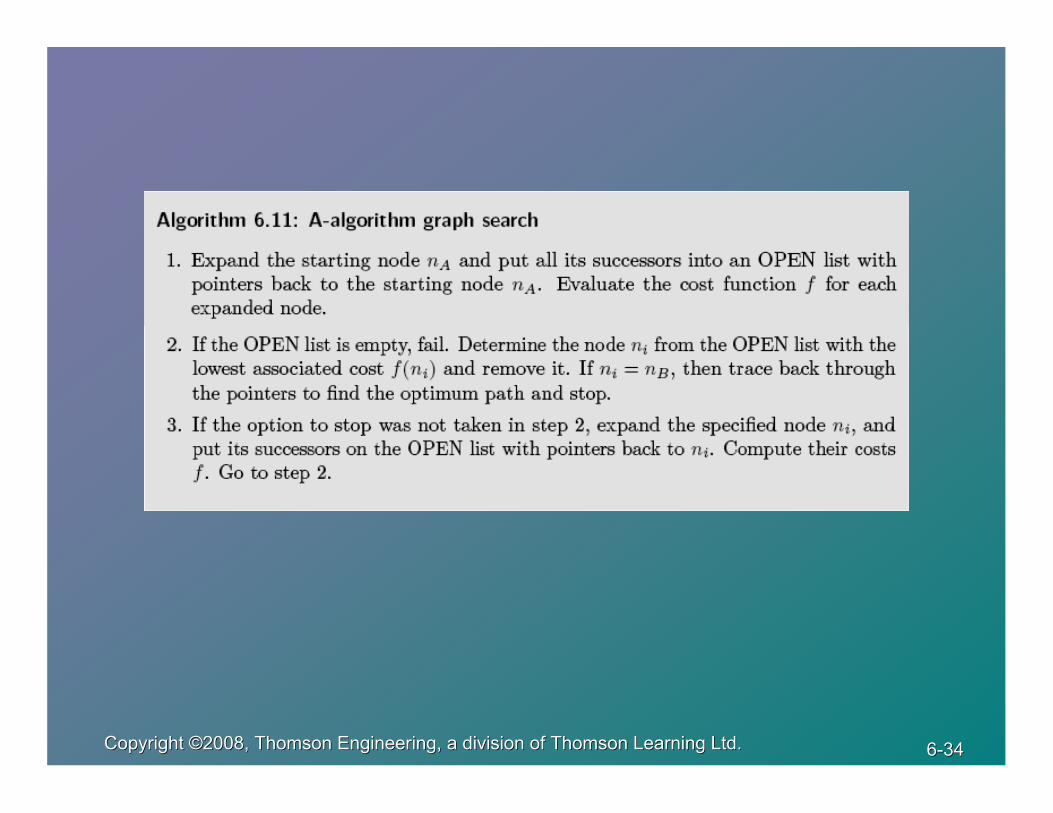
Graph searching uses Nilsson’s A-algorithm and guarantees optimality.Heuristic graph search may substantially increase search speed, althoughthe heuristics must satisfy additional constraints to guarantee optimality.
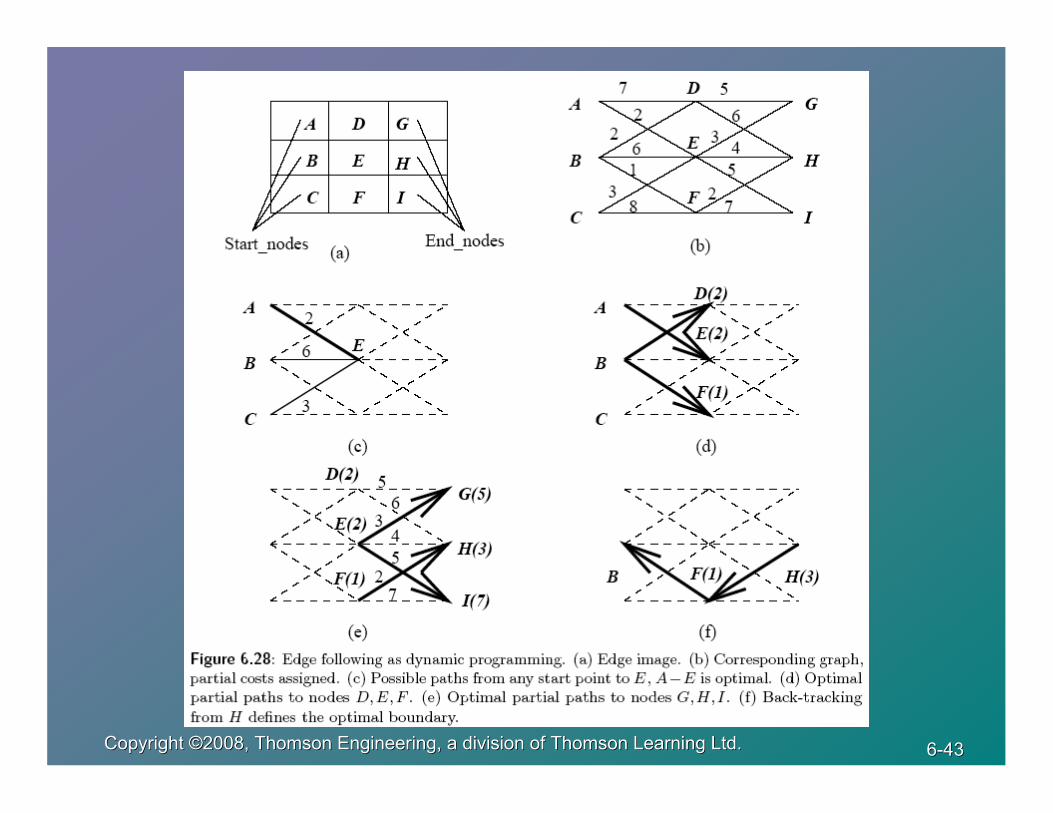
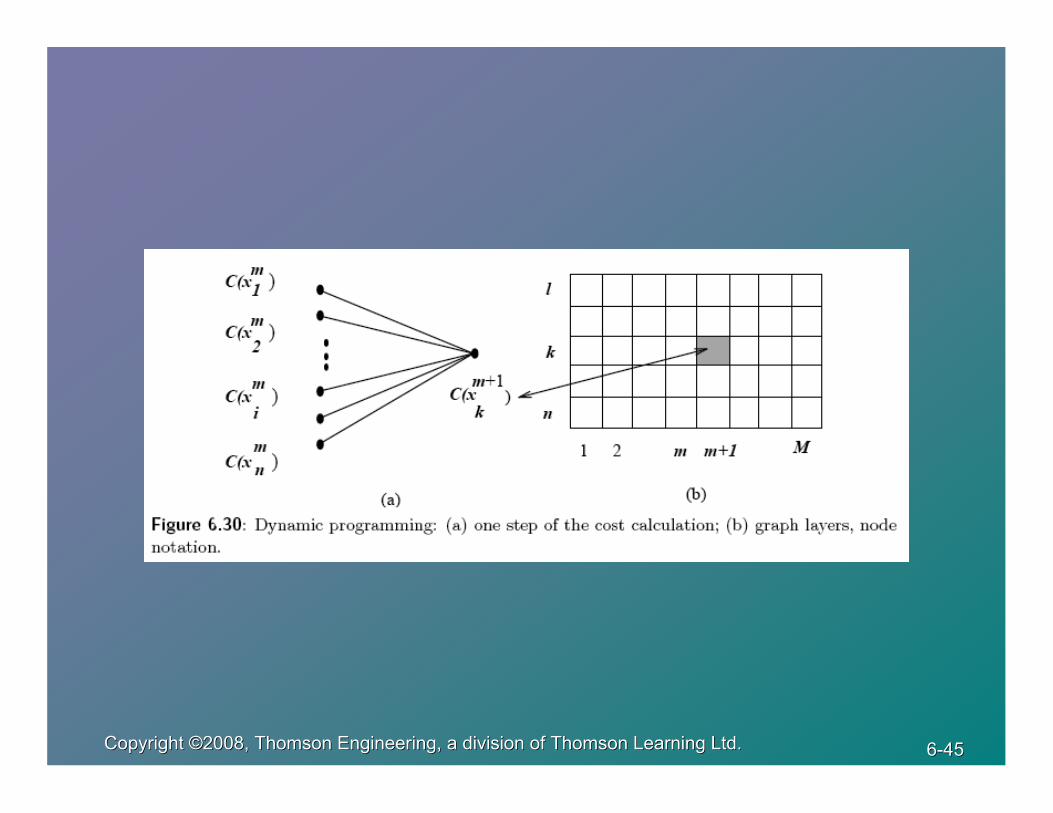
Dynamic programming is based on the principle of optimality and presents anefficient way of simultaneously searching for optimal paths from multiplestarting and ending points.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6363
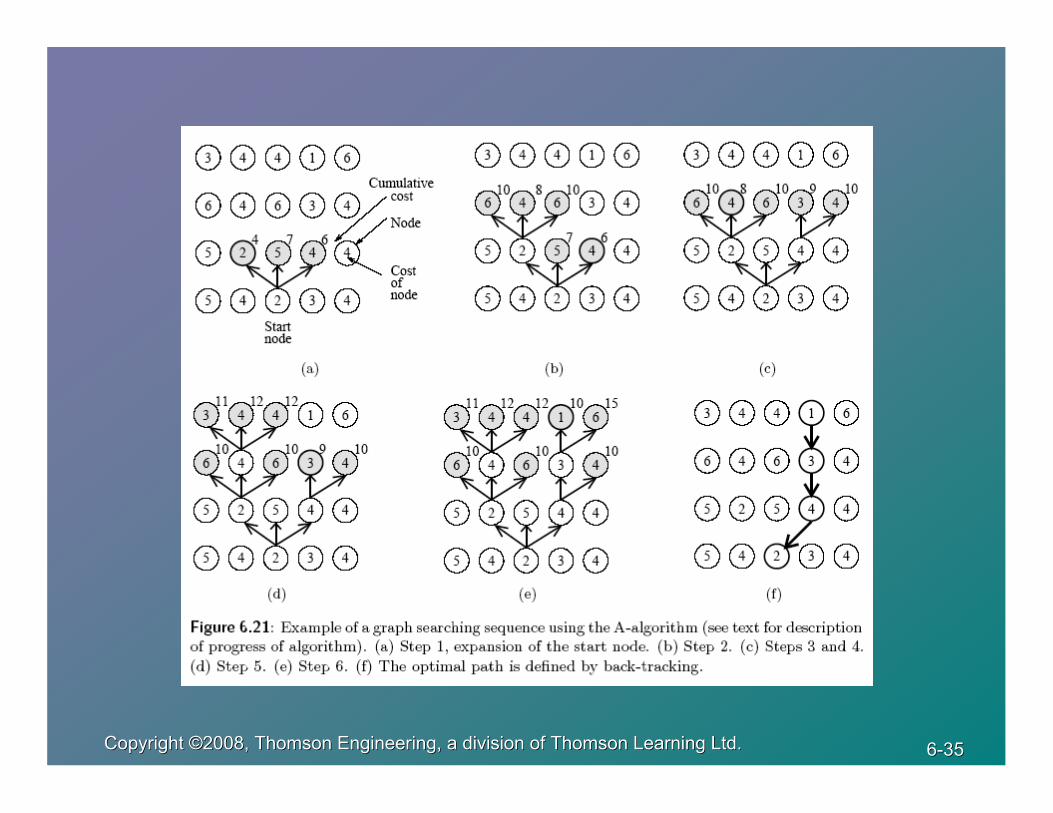
SummaryEdge-based image segmentation cont. Using the A-algorithm to search a graph, it is not necessary to construct the entire graph
since the costs associated with expanded nodes are calculated only if needed. Indynamic programming, a complete graph must be constructed.
If calculation of the local cost functions is computationally inexpensive, dynamicprogramming may represent a computationally less demanding choice. However, whichof the two graph searching approaches (A-algorithm, dynamic programming) is moreefficient for a particular problem depends on the evaluation functions and on the qualityof heuristics for an A-algorithm.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6464
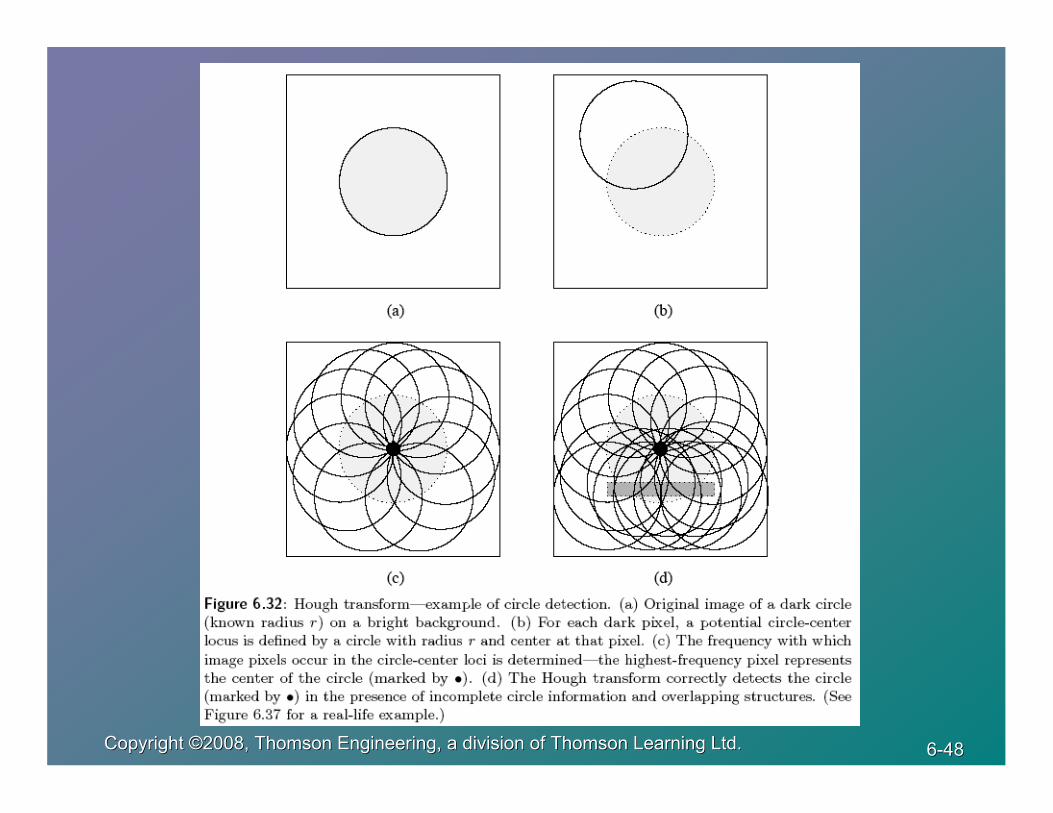
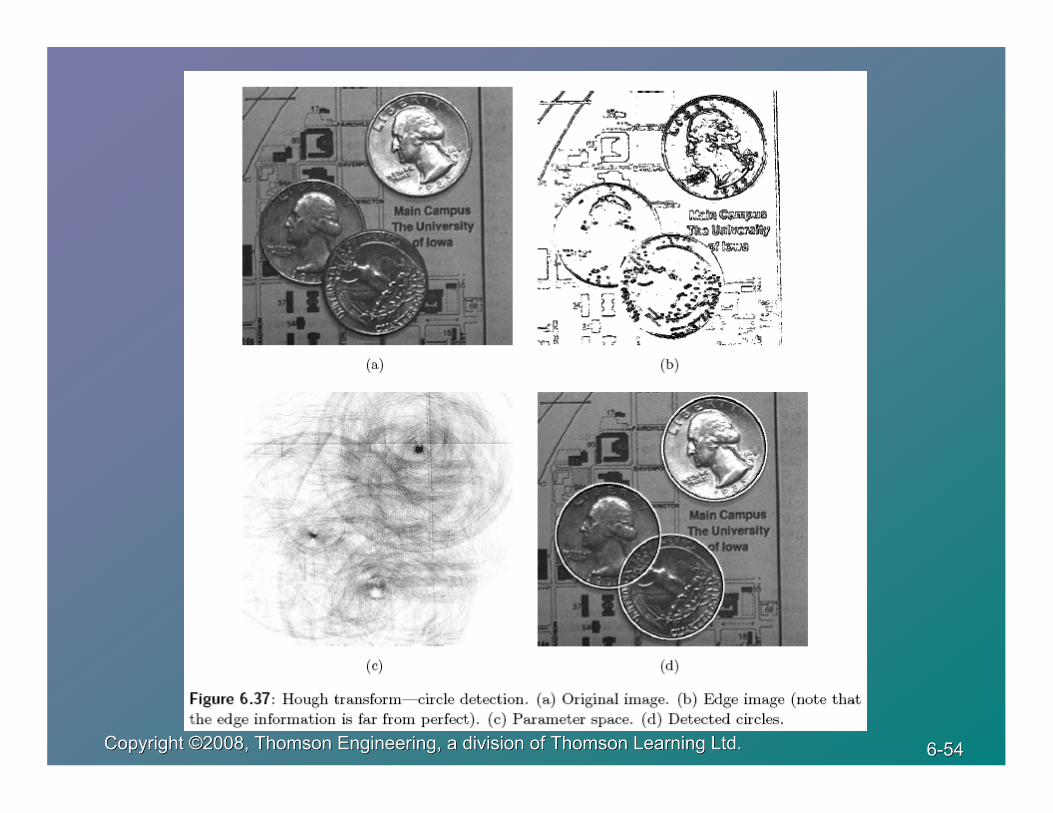
SummaryEdge-based image segmentation cont. Hough transform segmentation is applicable if objects of known shape are to
be detected within an image. The Hough transform can detect straight linesand curves (object borders) if their analytic equations are known. It is robust inrecognition of occluded and noisy objects.
The generalized Hough transform can be used if the analytic equations of thesearched shapes are not available; the parametric curve (region border)description is based on sample situations and is determined in the learningstage.
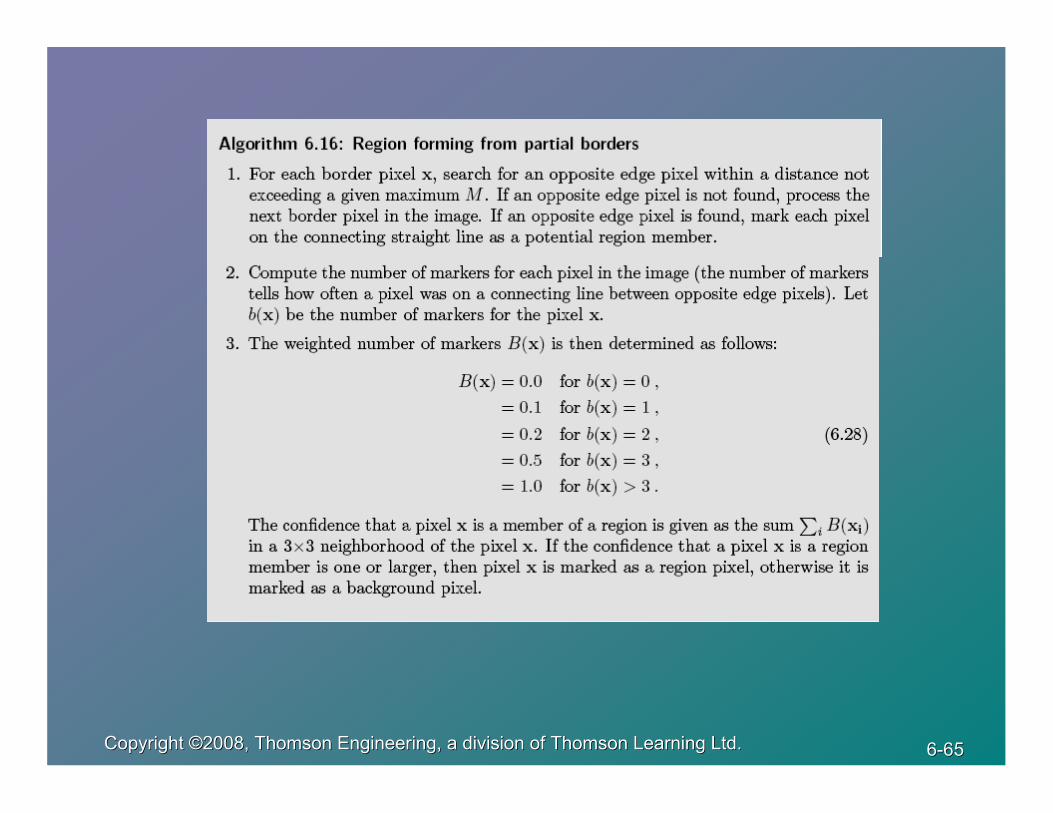
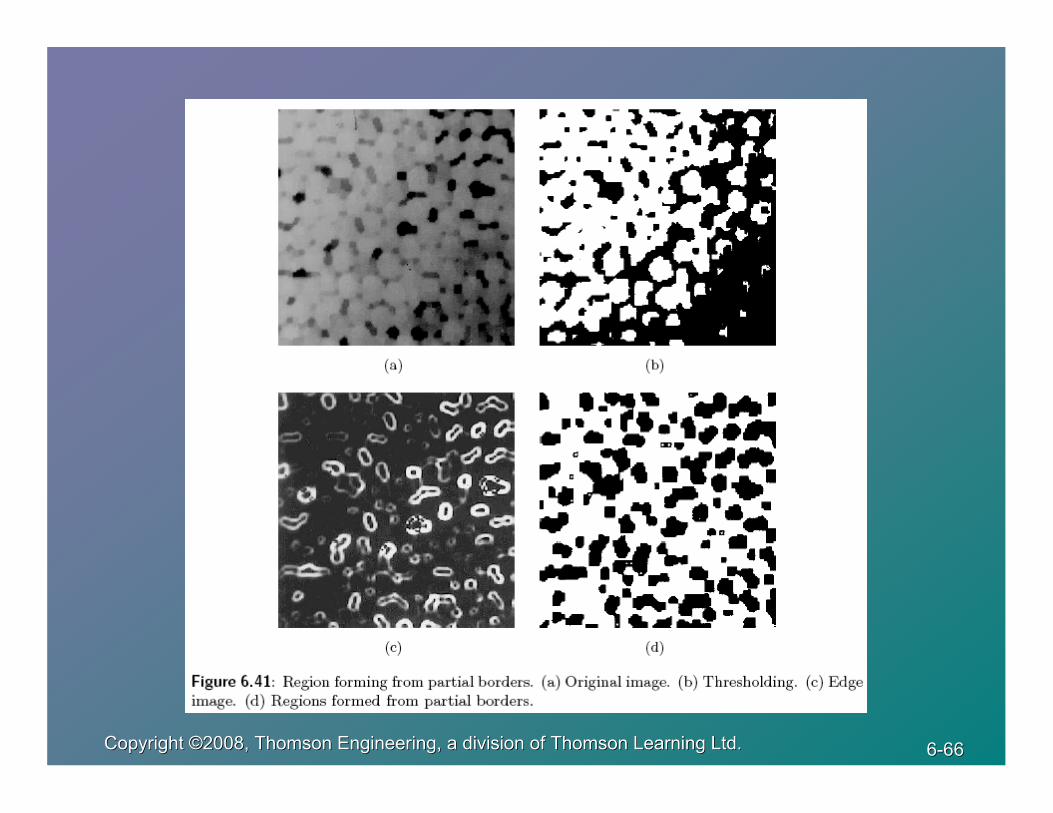
While forming the regions from complete borders is trivial, regiondetermination from partial borders may be a very complex task. Regionconstruction may be based on probabilities that pixels are located inside aregion closed by the partial borders. Such methods do not always findacceptable regions but they are useful in many practical situations.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6565
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6666
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6767
Region-based segmentation
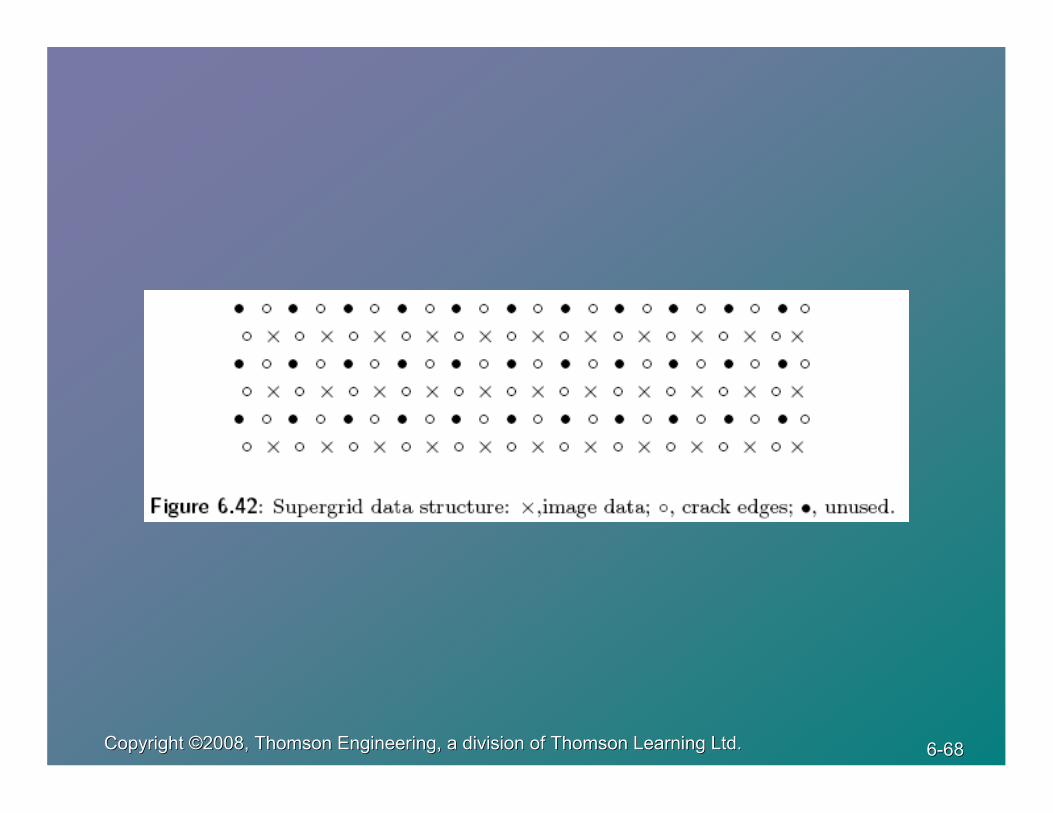
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6868
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-6969
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7070
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7171
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7272
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7373
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7474
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7575
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7676
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7777
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7878
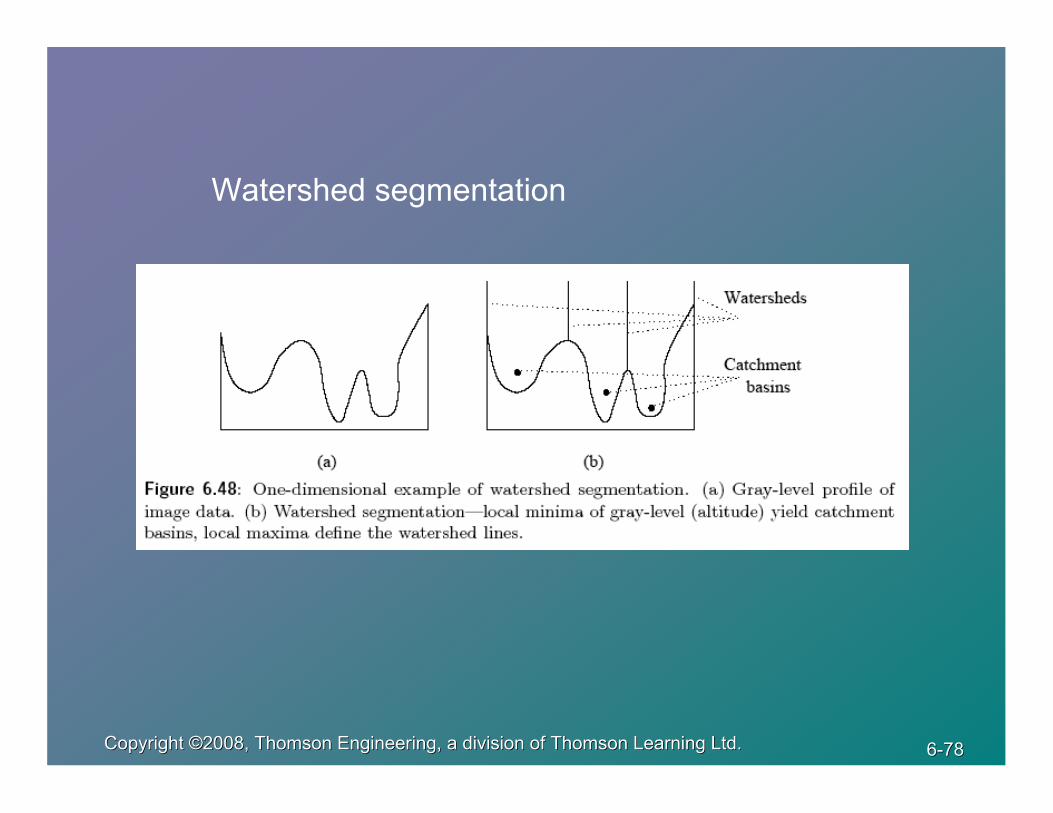
Watershed segmentation
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-7979
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8080
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8181
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8282
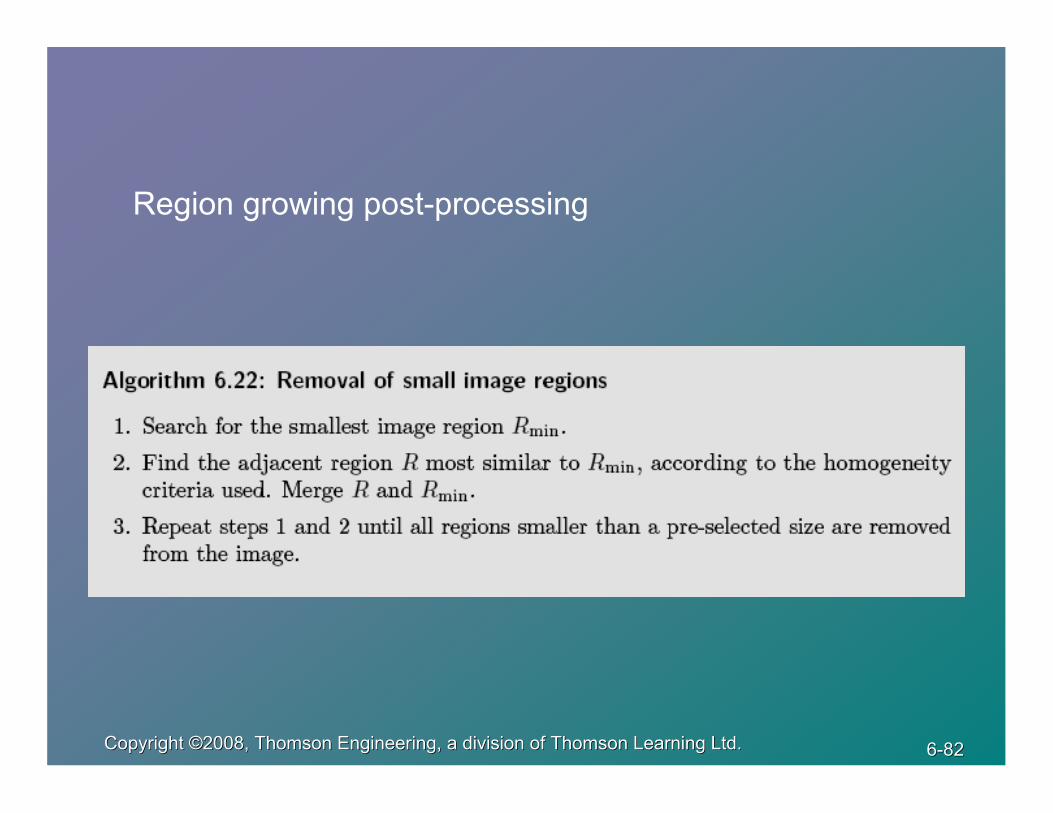
Region growing post-processing
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8383
SummaryImage segmentation The main goal of image segmentation is to divide an image into parts that have
a strong correlation with objects or areas of the real world depicted in theimage.
Segmentation methods can be divided into three groups: thresholding,edgebased segmentation and region-based segmentation.
Each region can be represented by its closed boundary, and each closedboundary describes a region.
Image data ambiguity is one of the main segmentation problems, oftenaccompanied by information noise.
The more a priori information is available to the segmentation process, thebetter the segmentation results that can be obtained.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8484
SummaryRegion-based image segmentation Region growing segmentation should satisfy the following condition of
complete segmentation (6.1)
and the maximum region homogeneity conditions (6.30), (6.31)
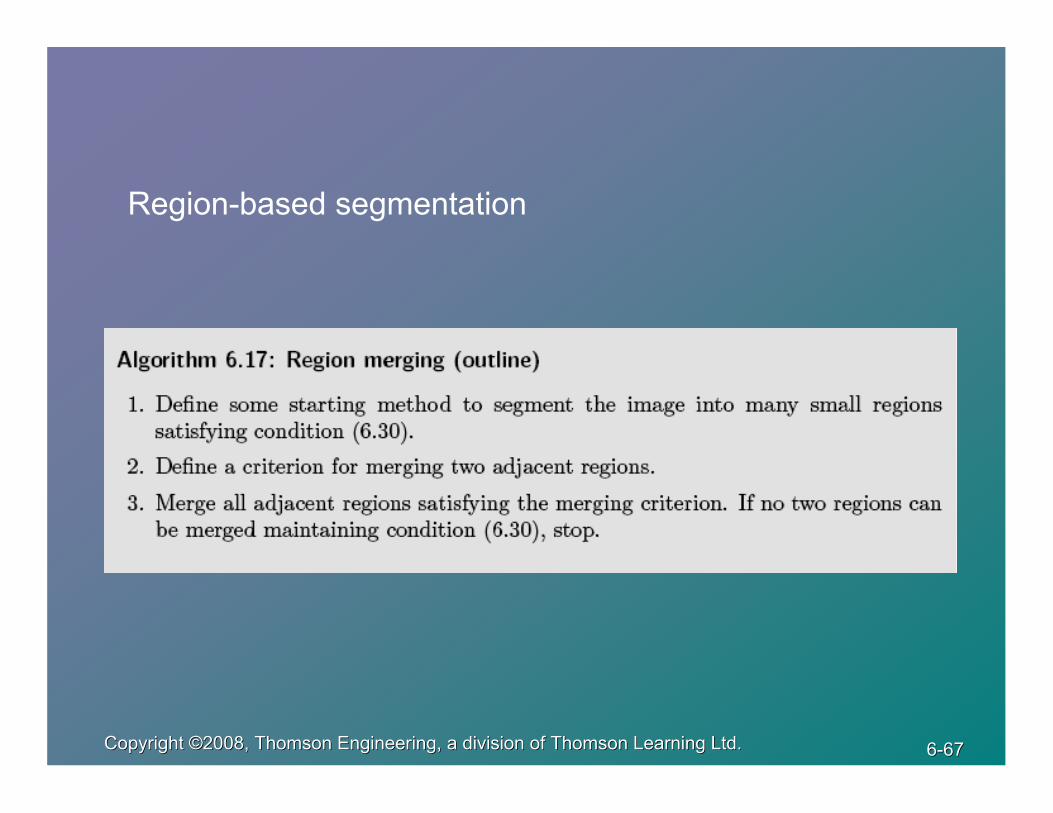
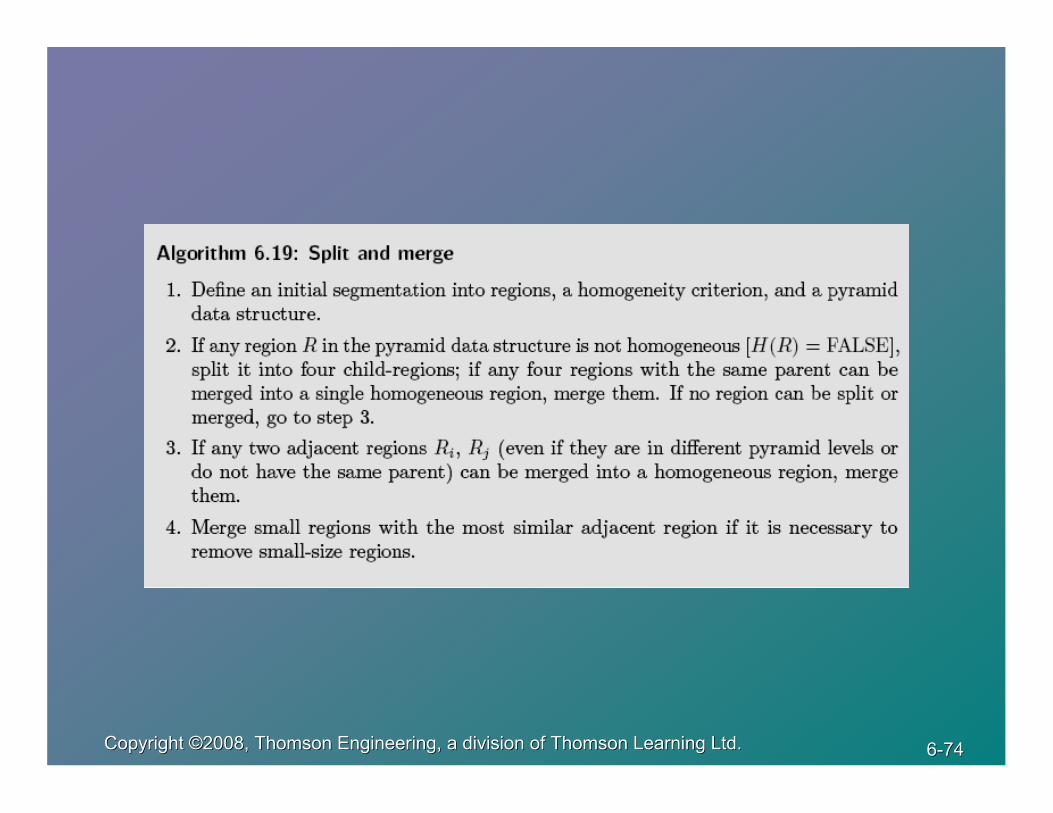
Three basic approaches to region growing exist: region merging, regionsplitting, and split-and-merge region growing.
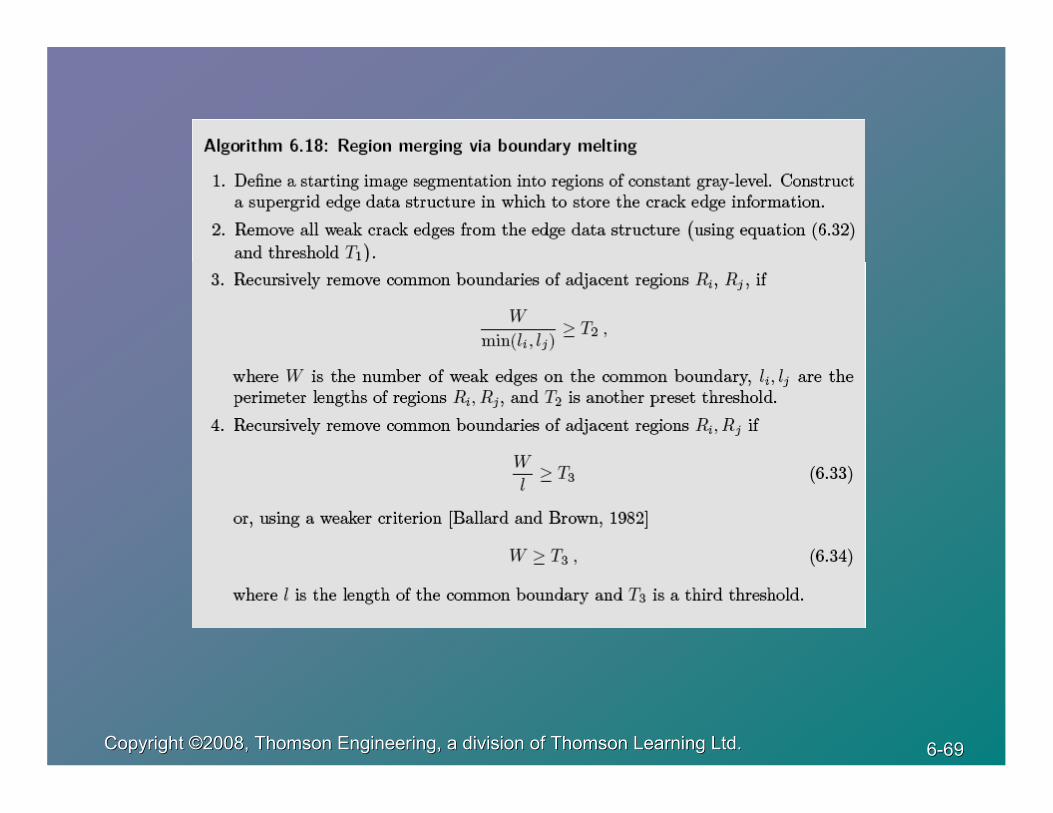
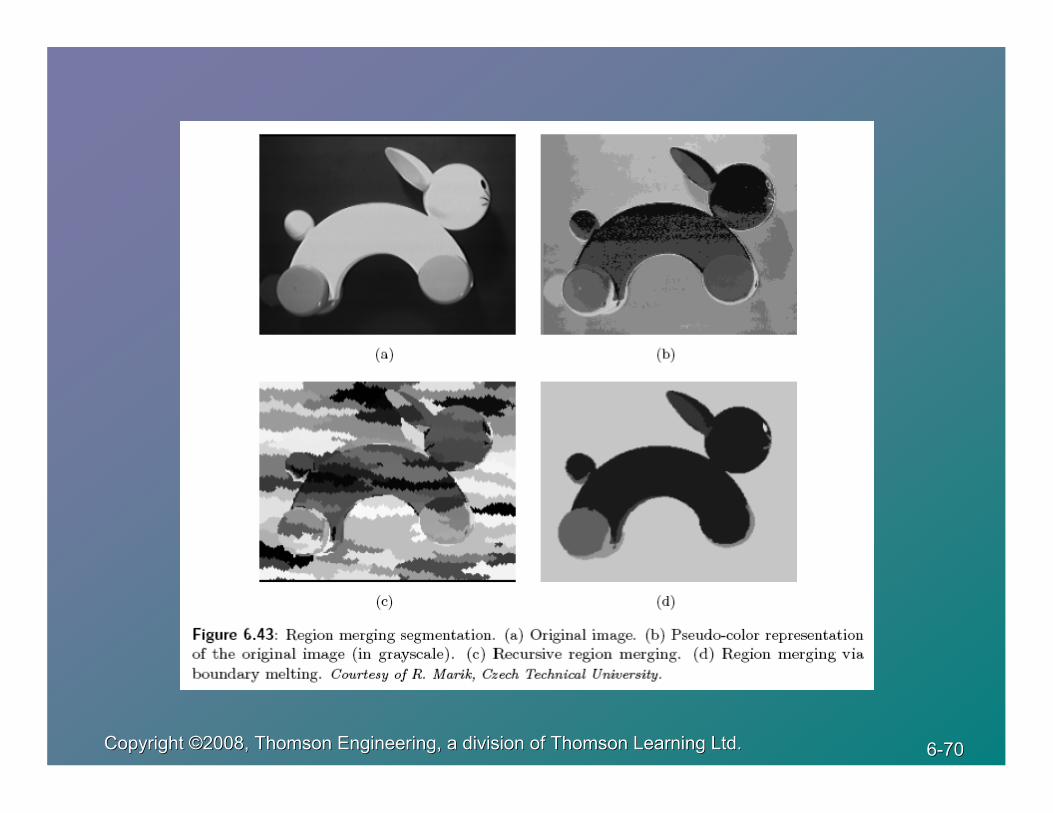
Region merging starts with an oversegmented image in which regions satisfyequation (6.30). Regions are merged to satisfy condition (6.31) as long asequation (6.30) remains satisfied.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8585
SummaryRegion-based image segmentation cont. Region splitting is the opposite of region merging. Region splitting begins with
an undersegmented image which does not satisfy condition (6.30). Therefore,the existing image regions are sequentially split to satisfy conditions (6.1),(6.30), and (6.31).
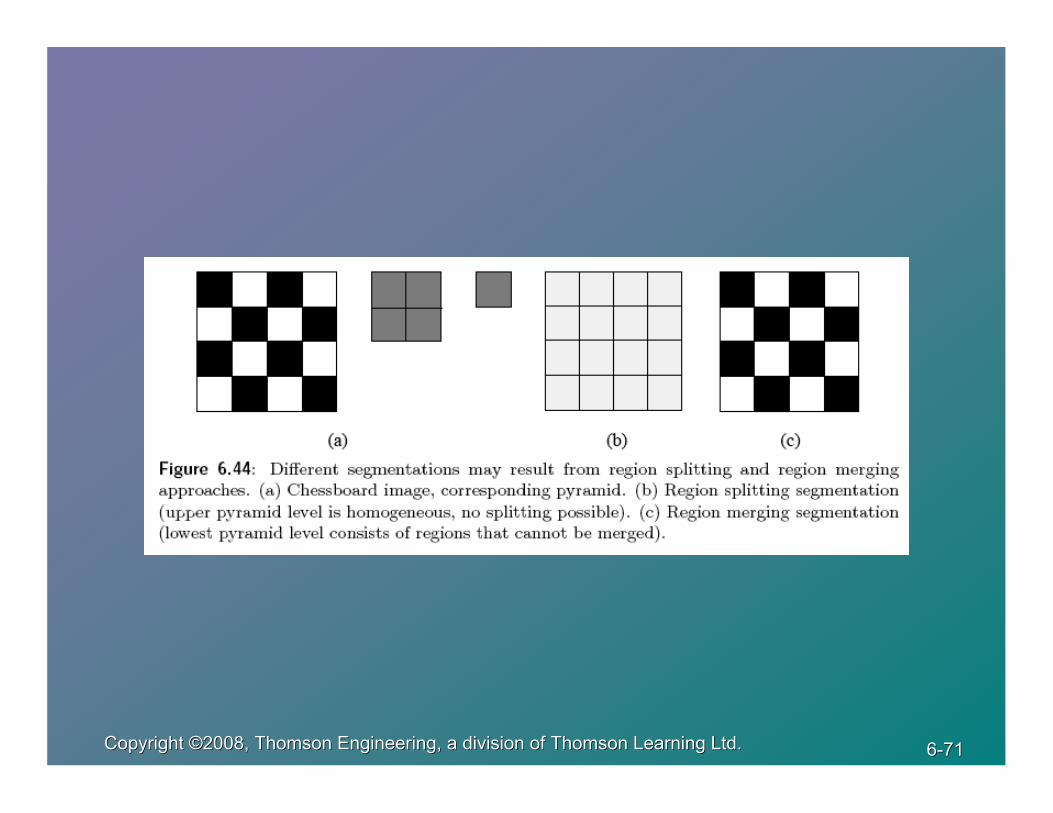
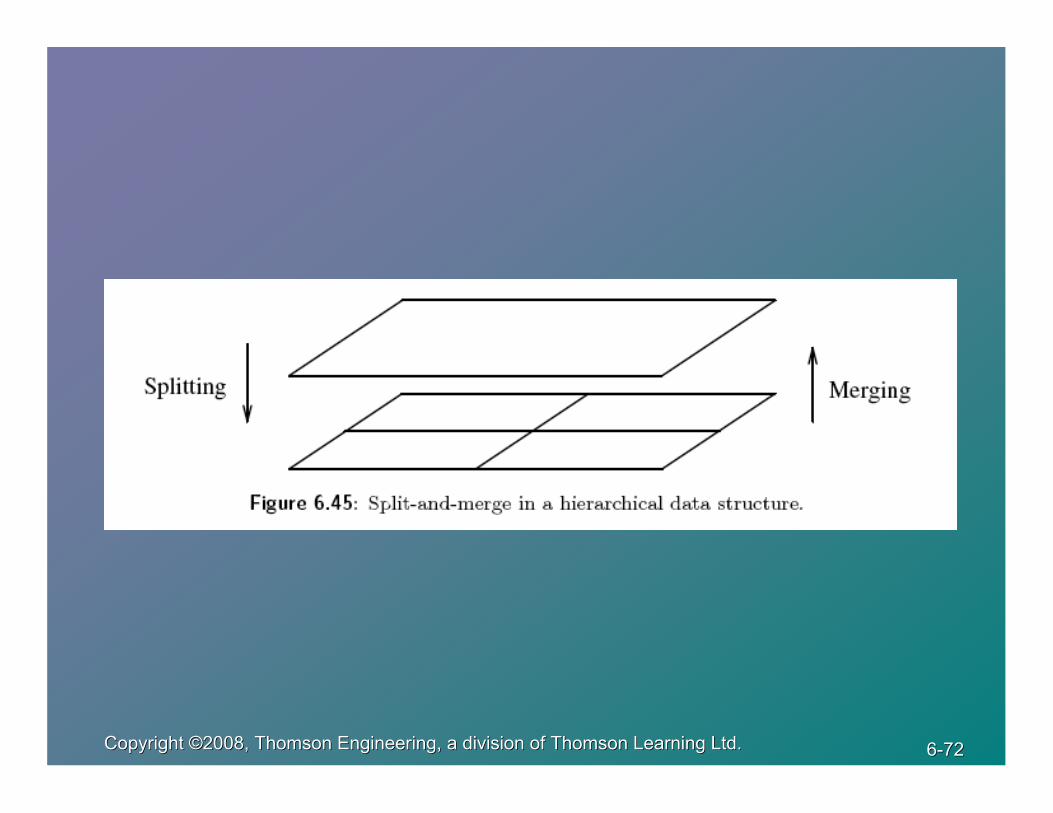
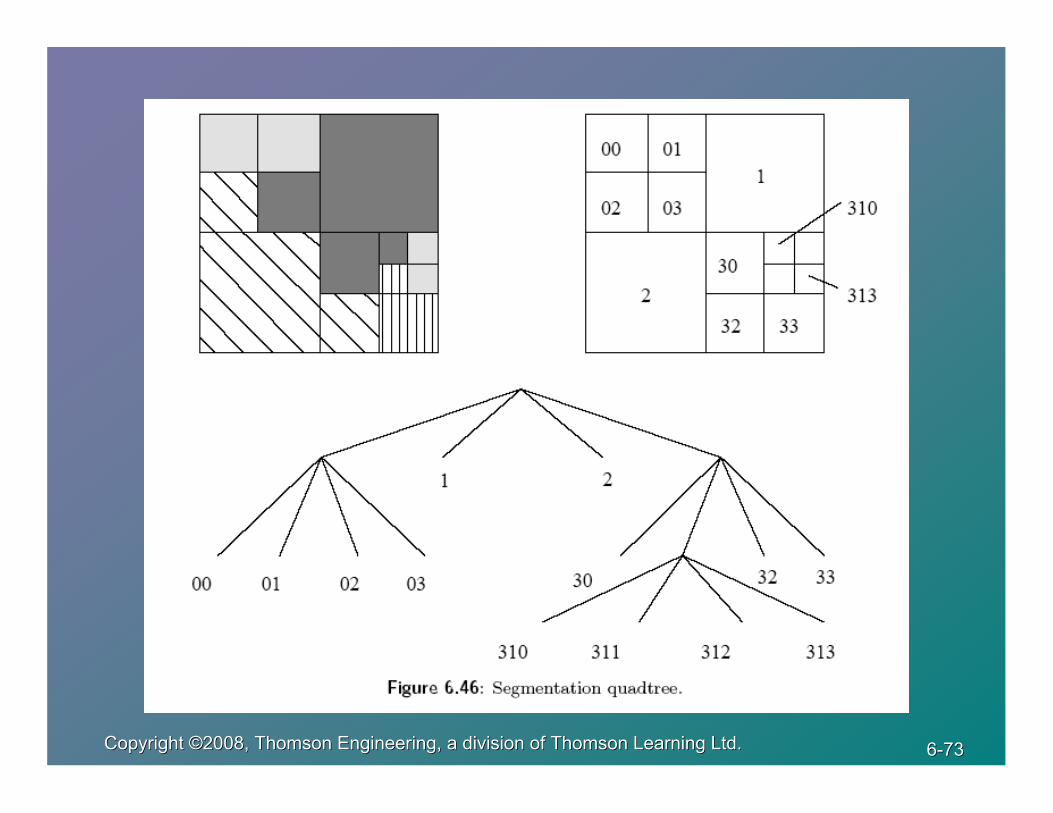
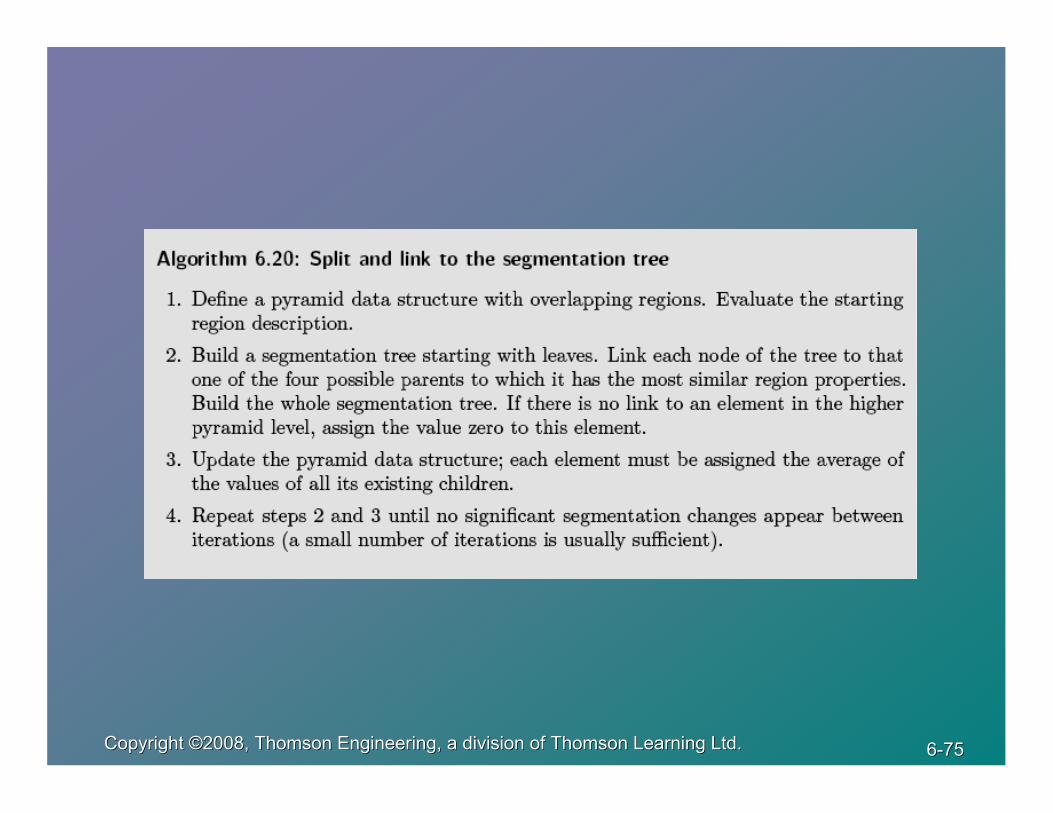
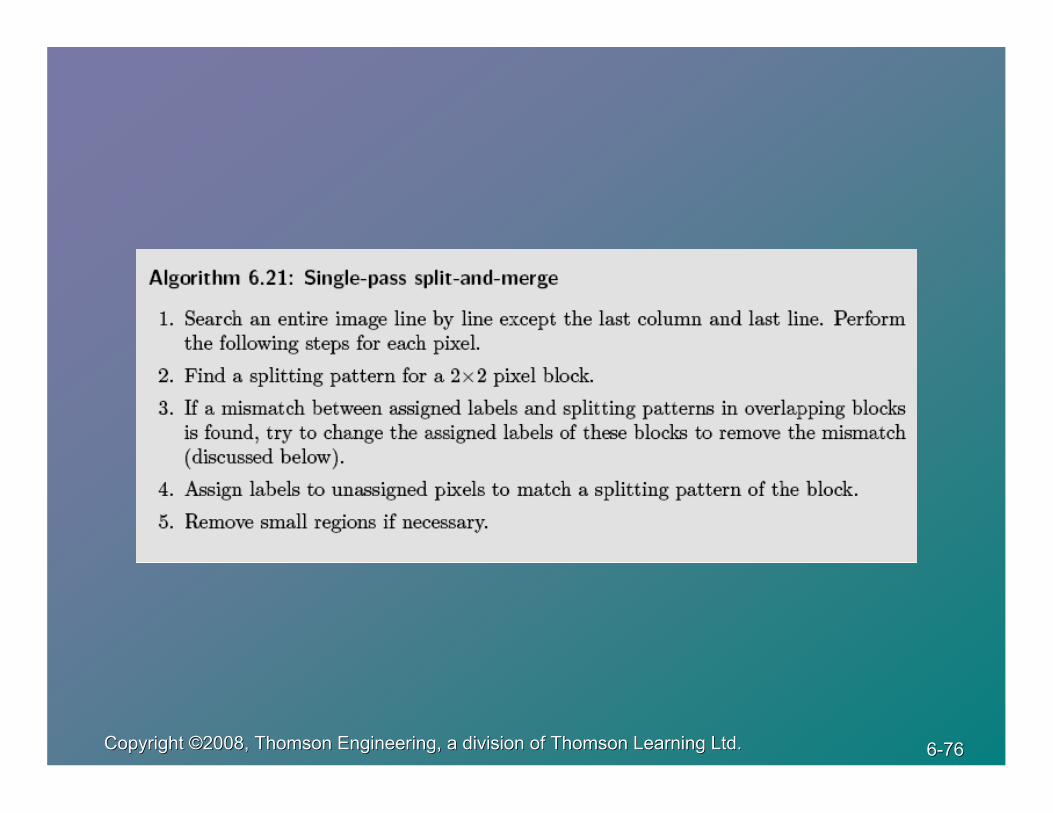
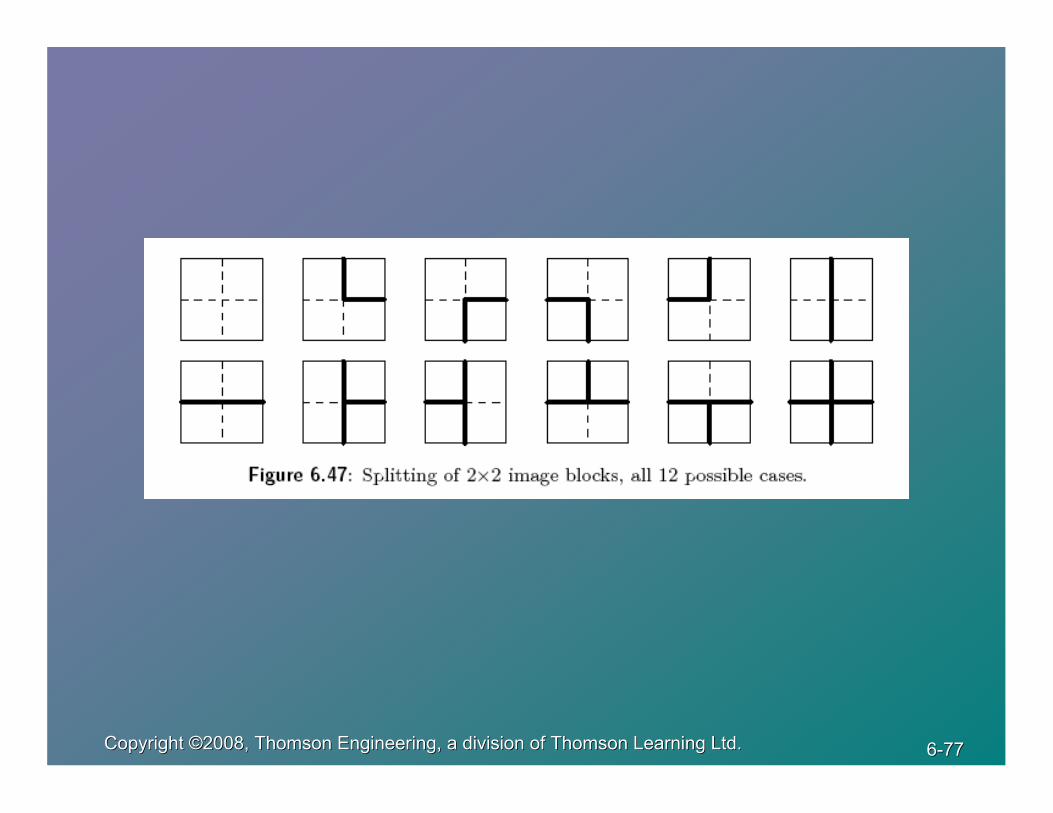
A combination of splitting and merging may result in a method with theadvantages of both other approaches. Split-and-merge approaches typicallyuse pyramid image representations. Because both split-and-merge processingoptions are available, the starting segmentation does not have to satisfy eithercondition (6.30) or (6.31).
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8686
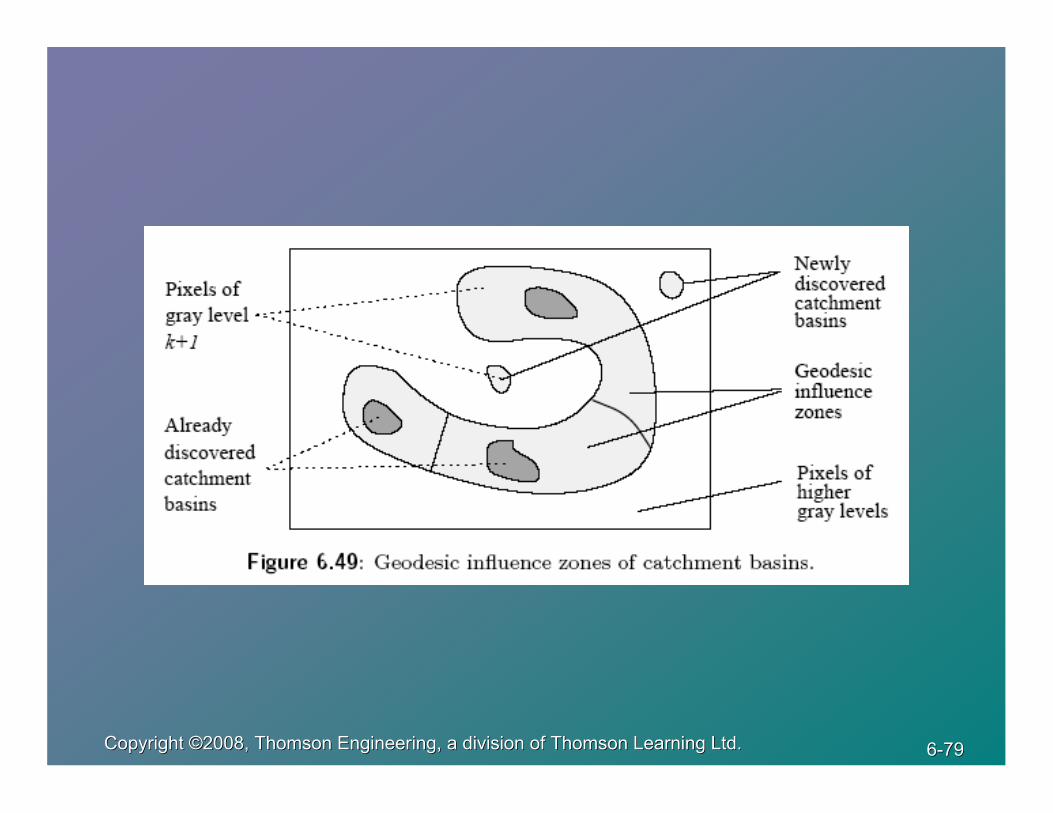
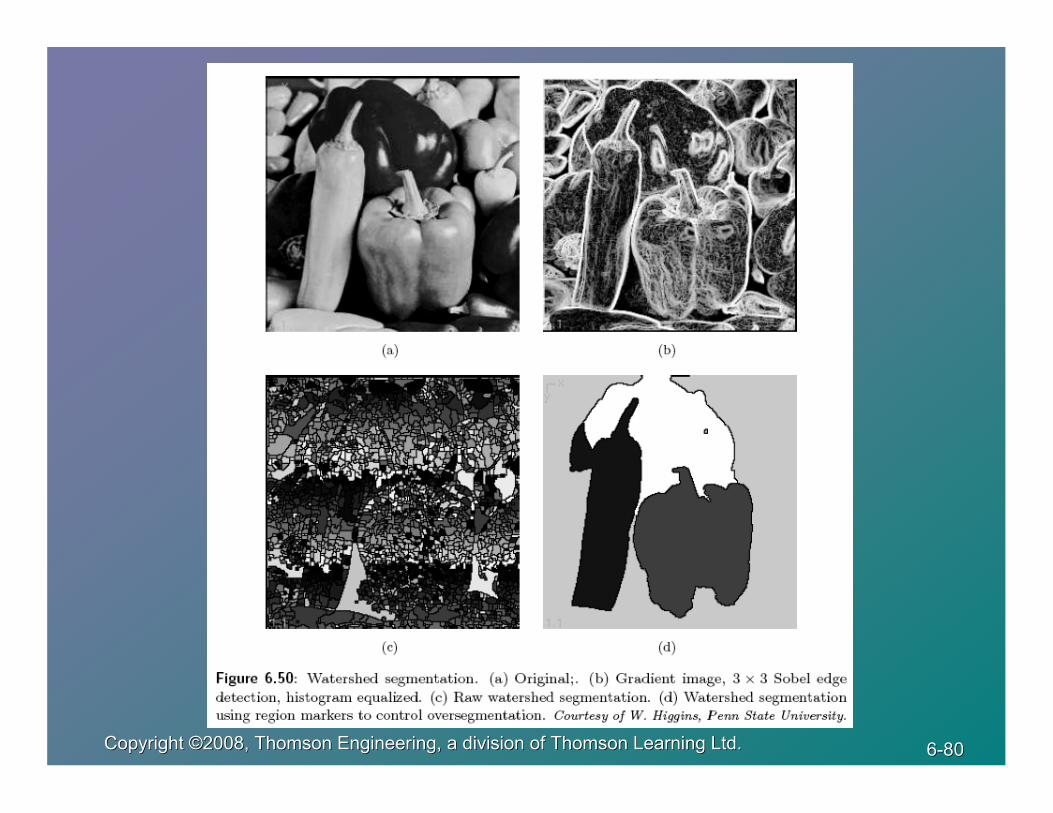
SummaryRegion-based image segmentation cont. In watershed segmentation, catchment basins represent the regions of the
segmented image. The first watershed segmentation approach starts withfinding a downstream path from each pixel of the image to local minima ofimage surface altitude. A catchment basin is then defined as the set of pixelsfor which their respective downstream paths all end up in the same altitudeminimum. In the second approach, each gray-level minimum represents onecatchment basin and the strategy is to start filling the catchment basins fromthe bottom.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8787
Summary
Region-based image segmentation cont. Images segmented by region growing methods often contain either too
many regions (under-growing) or too few regions (over-growing) as aresult of nonoptimal parameter setting. To improve classificationresults, a variety of postprocessors has been developed. Simplerpost-processors decrease the number of small regions in thesegmented image. More complex post-processing may combinesegmentation information obtained from region growing and edge-based segmentation.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8888
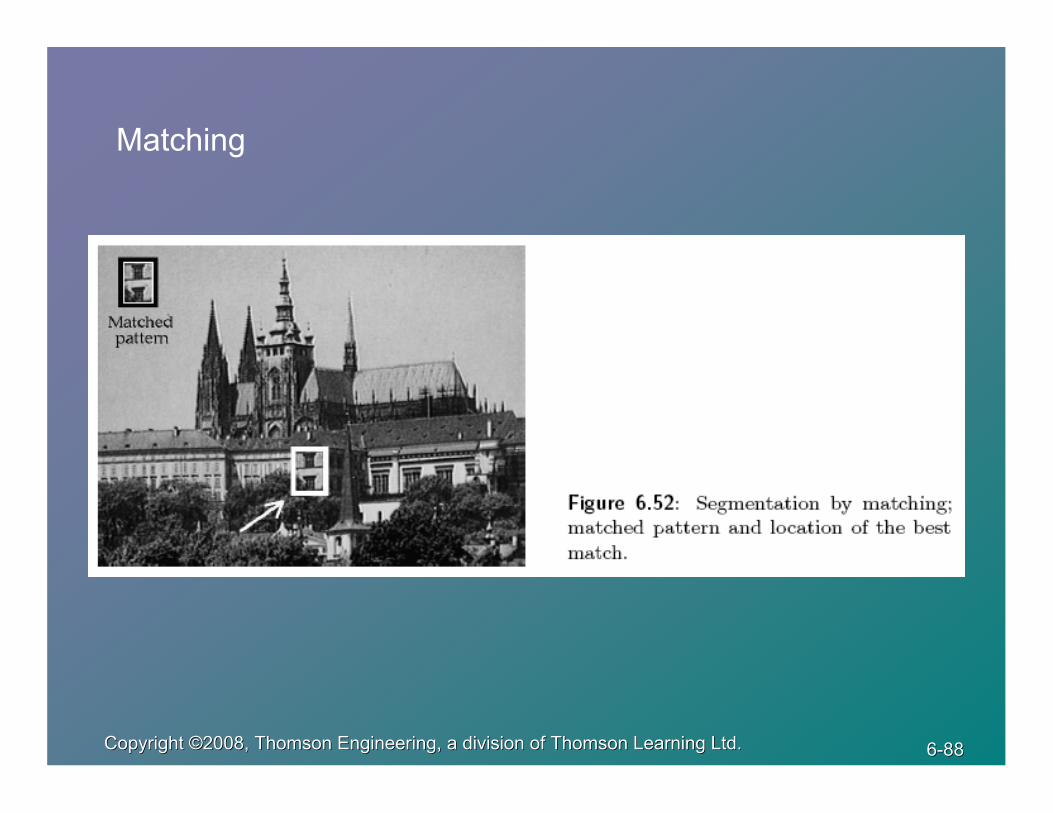
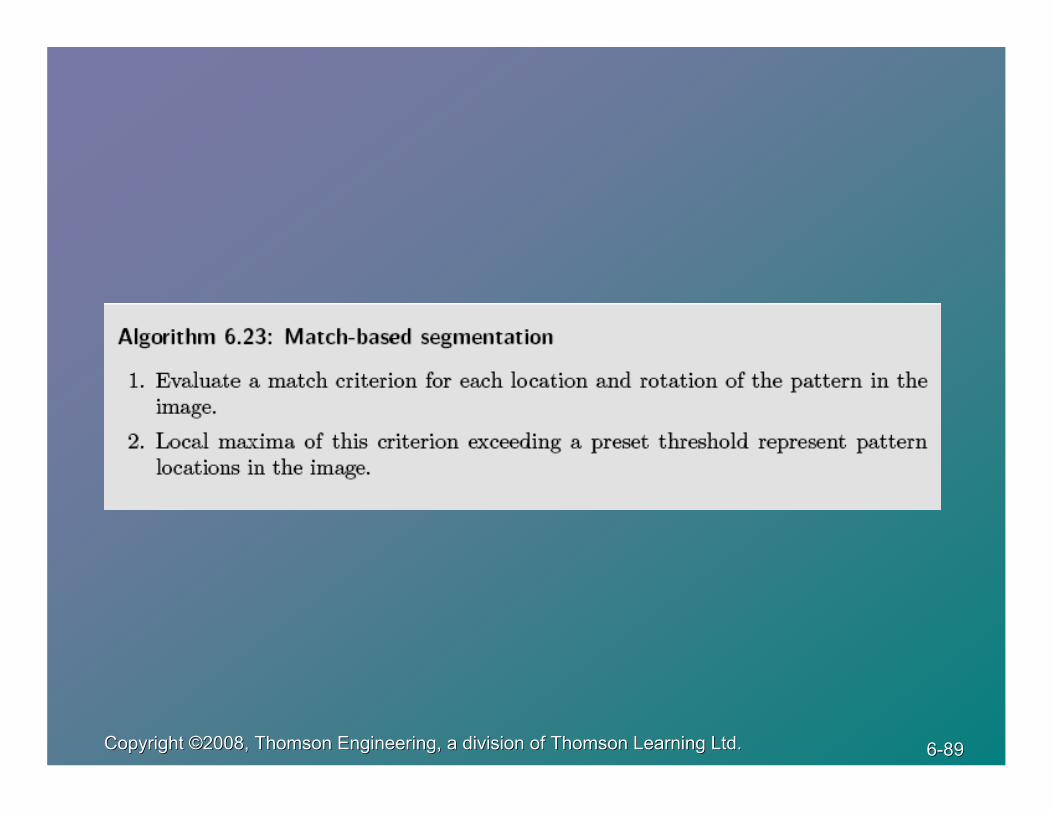
Matching
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-8989
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9090
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9191
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9292
Summary
Matching Matching can be used to locate objects of known appearance in an
image, to search for specific patterns, etc. The best match is based onsome criterion of optimality which depends on object properties andobject relations.
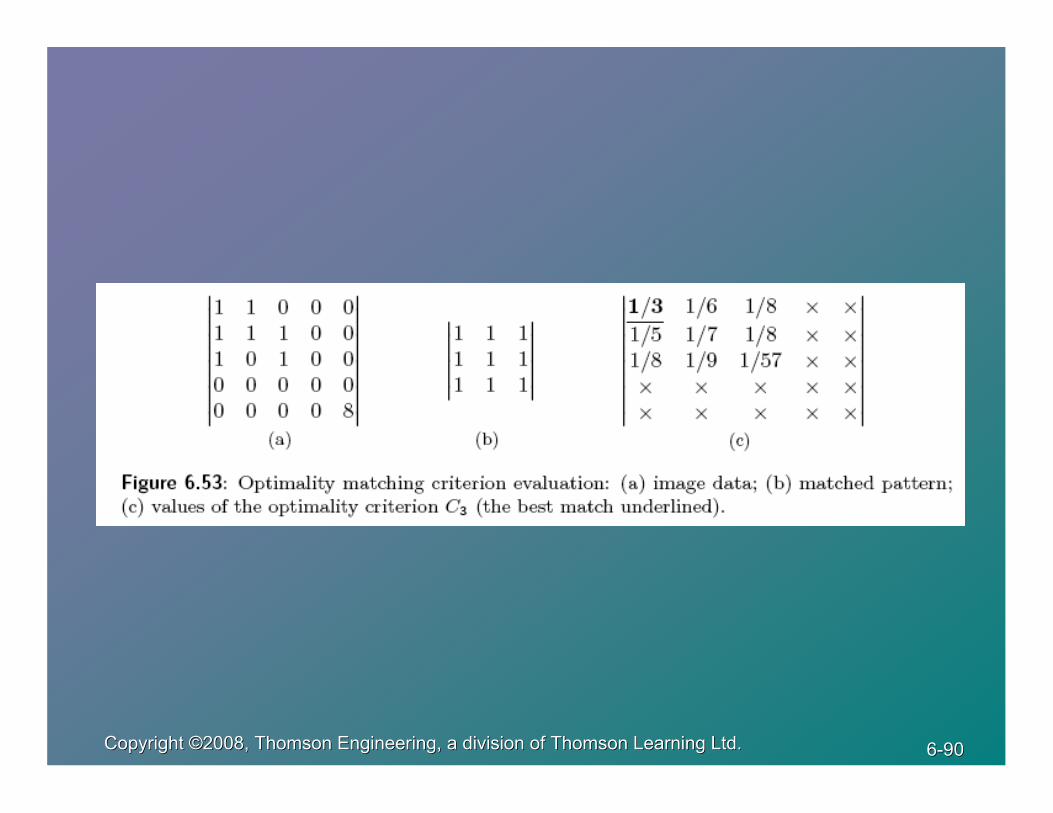
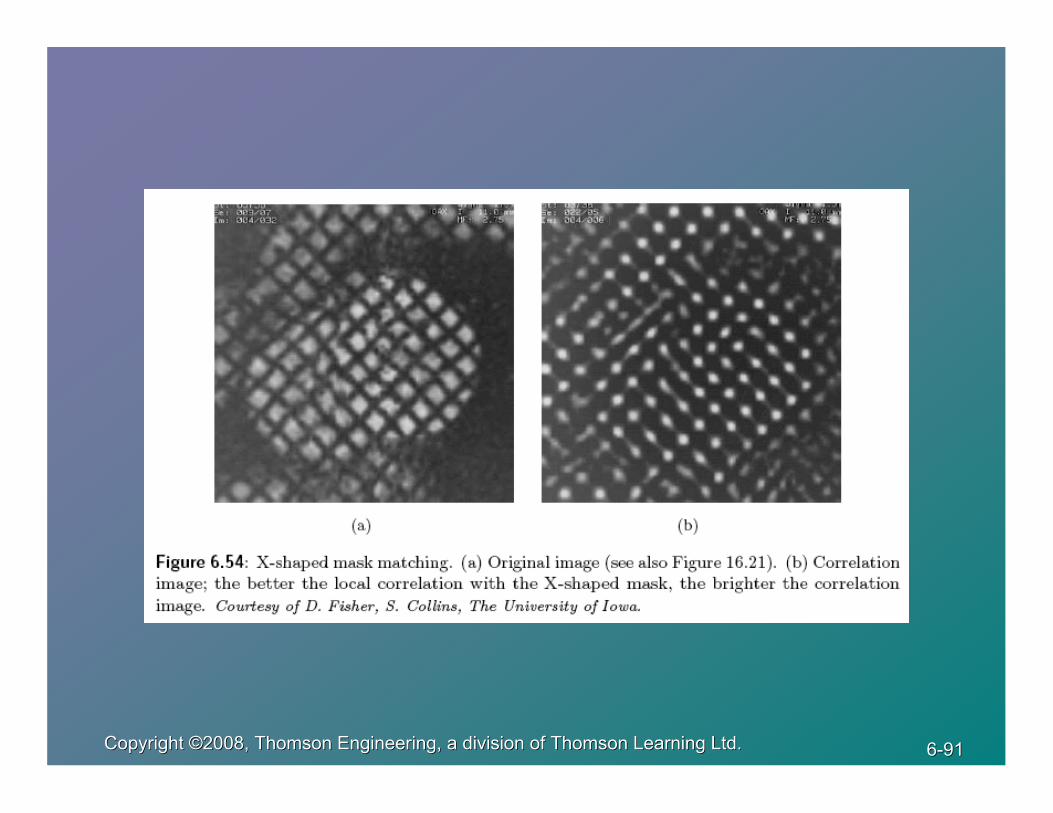
Matching criteria can be defined in many ways; in particular, correlationbetween a pattern and the searched image data is often used as ageneral matching criterion.
Chamfer matching may be used to locate one-dimensional featuresthat might otherwise defeat cost-based optimality approaches.
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9393
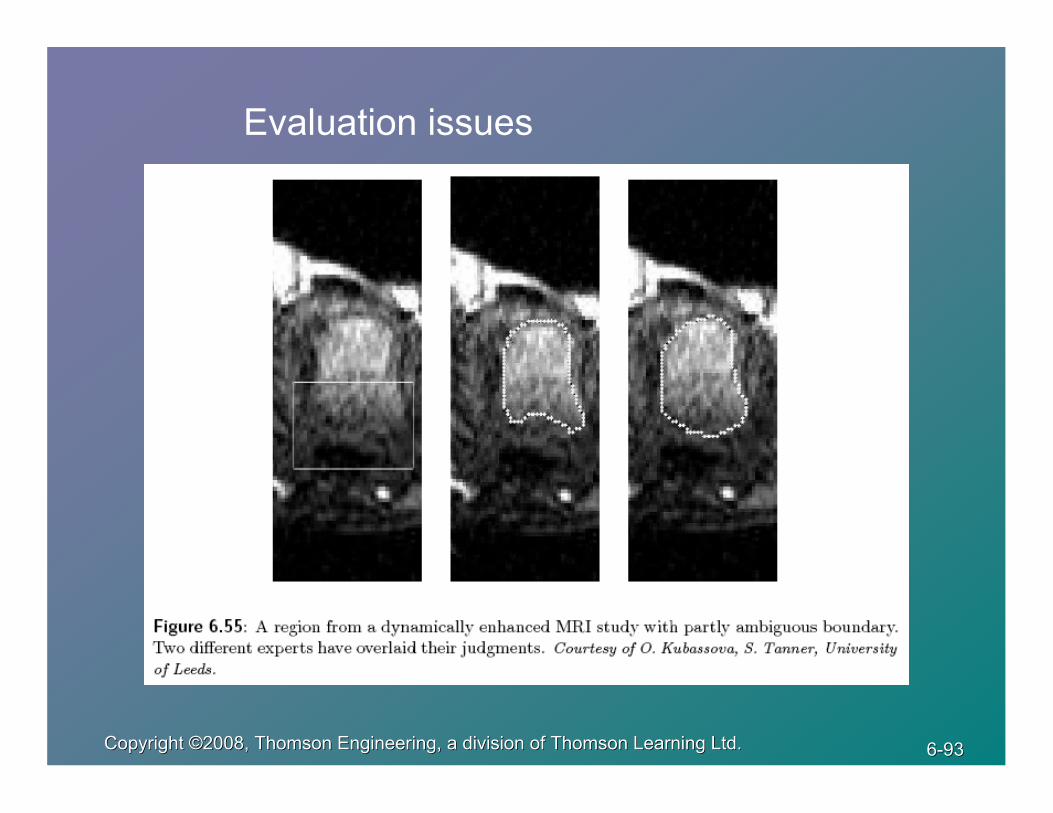
Evaluation issues
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9494
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9595
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9696
Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd.Copyright ©2008, Thomson Engineering, a division of Thomson Learning Ltd. 6-6-9797
Summary
Evaluation Evaluation of segmentation is useful in deciding between algorithms, or
parameter choice for a given algorithm.
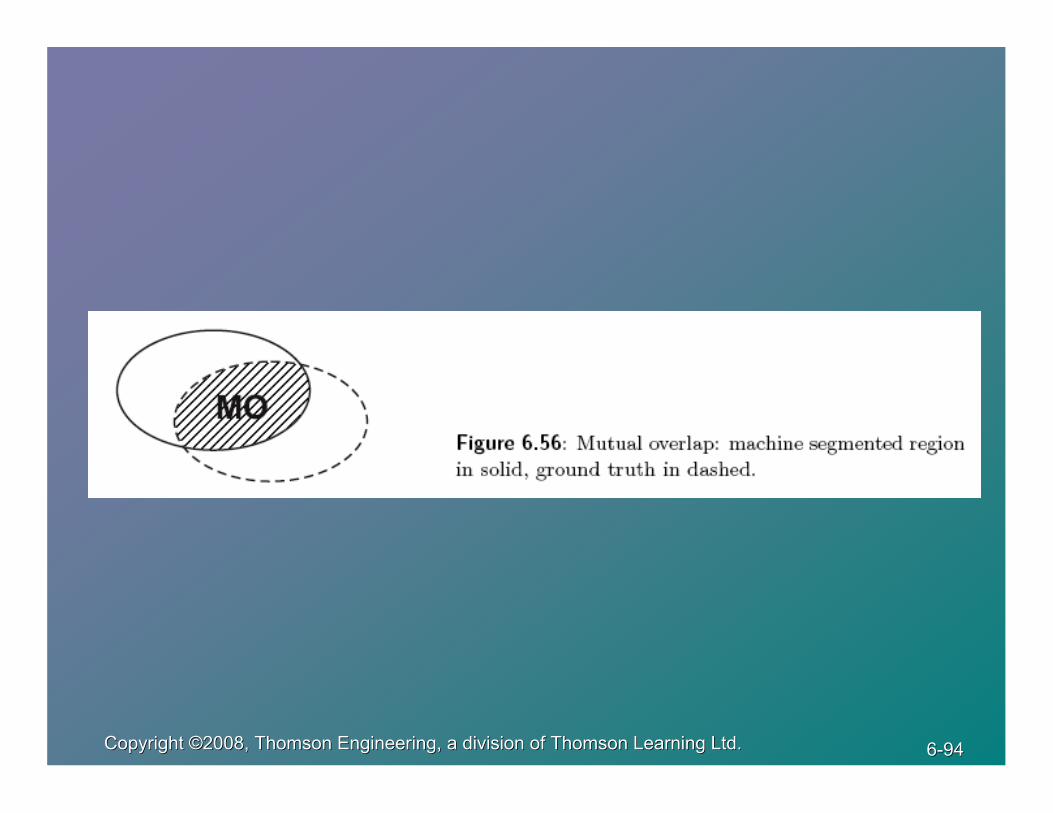
Supervised evaluation compares algorithm output to ground truth.
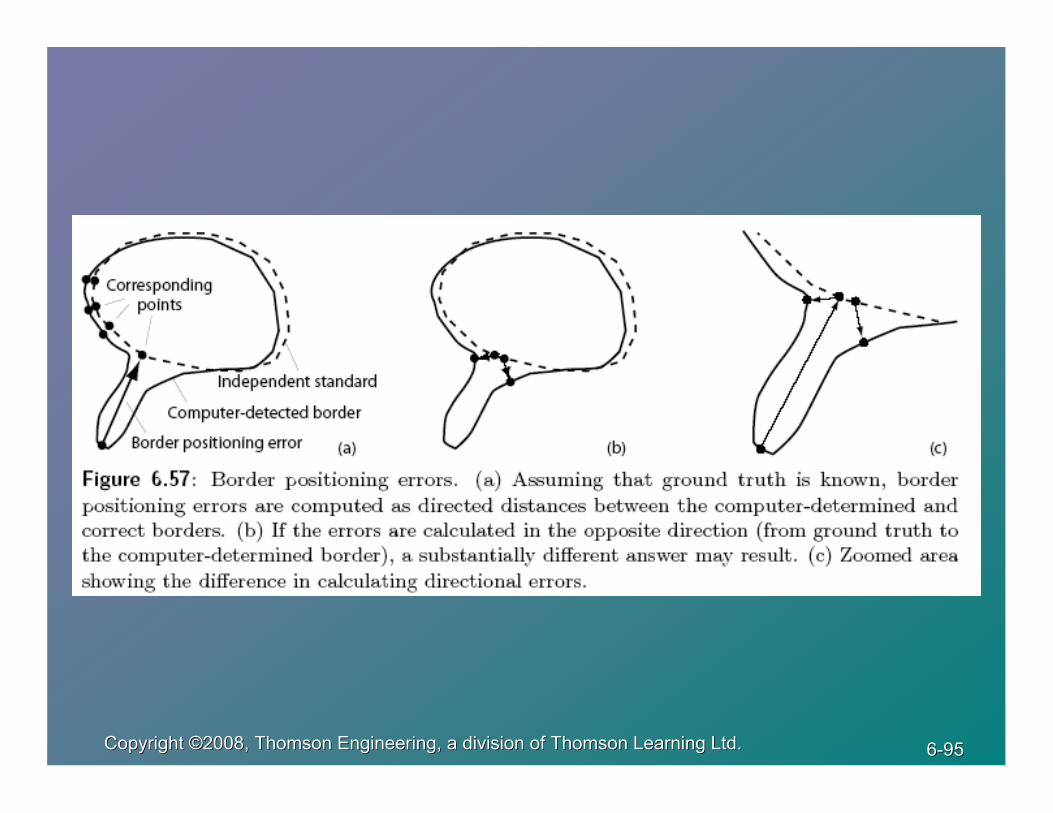
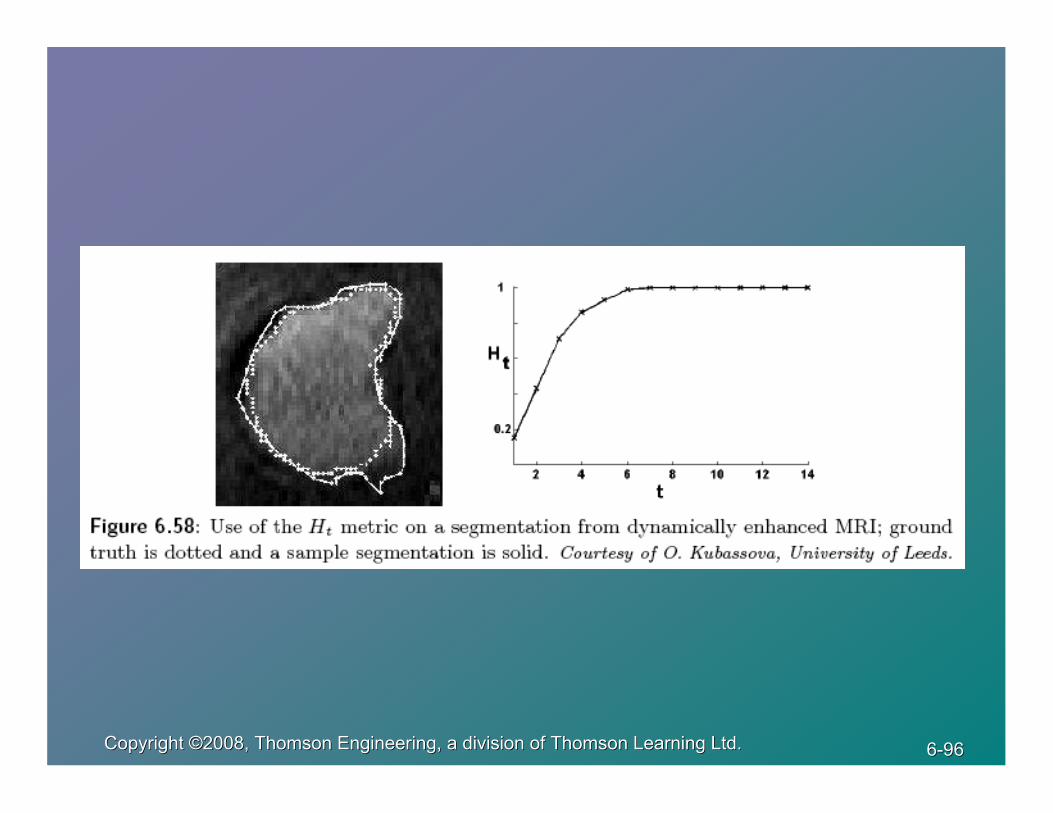
Supervised approaches usually compare area overlap, or distancebetween boundaries—there are several ways of doing this.
Ground truth is often poorly defined or expensive to extract.Unsupervised approaches judge segmentations in ignorance of it.
Many unsupervised approaches exist but they are usually constrainedby assumptions about image regions.





























