Embed Size (px)
Citation preview

CHAPTER 4 Second-Order LinearDifferential Equations
4.1 The Harmonic Oscillator
!!!! The Undamped Oscillator
1. !!x x+ = 0, x 0 1( ) = , !x 0 0( ) =
The general solution of the harmonic oscillator equation !!x x+ = 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
cos sin! sin cos .
Substituting this expression into the initial conditions x 0 1( ) = , !x 0 0( ) = , gives
x cx c
0 10 0
1
2
( ) = =( ) = =!
so c1 1= , c2 0= . Hence, the IVP has the solution x t t( ) = cos .
2. !!x x+ = 0, x 0 1( ) = , !x 0 1( ) =
The general solution of the harmonic oscillator equation !!x x+ = 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
cos sin! sin cos .
Substituting this expression into the initial conditions x 0 1( ) = , !x 0 1( ) = , gives
x cx c
0 10 1
1
2
( ) = =( ) = =!
or c c1 2 1= = . Hence, the IVP has the solution
x t t t( ) = +cos sin .
253

254 CHAPTER 4 Second-Order Linear Differential Equations
In polar form, this would be
x t tb g = −FHGIKJ2
4cos π .
3. !!x x+ =9 0, x 0 1( ) = , !x 0 1( ) =
The general solution of the harmonic oscillator equation !!x x+ =9 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
3 33 3 3 3cos sin
! sin cos .
Substituting this expression into the initial conditions x 0 1( ) = , !x 0 1( ) = , gives
x cx c
0 10 3 1
1
2
( ) = =( ) = =!
so c1 1= , c213
= . Hence, the IVP has the solution
x t t t( ) = +cos sin3 13
3 .
In polar form, this would be
x t tb g b g= −103
3cos δ
where δ = −tan 1 13
. This would be in the first quadrant.
4. !!x x+ =4 0, x 0 1( ) = , !x 0 2( ) = −
The general solution of the harmonic oscillator equation !!x x+ =4 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
2 22 2 2 2cos sin
! sin cos .
Substituting this expression into the initial conditions x 0 1( ) = , !x 0 2( ) = − , gives
x cx c
0 10 2 2
1
2
( ) = =( ) = = −!
so c1 1= , c2 1= − . Hence, the IVP has the solution
x t t t( ) = −cos sin2 2 .
In polar form, this would be
x t tb g = +FHGIKJ2 2
4cos π .

SECTION 4.1 The Harmonic Oscillator 255
5. !!x x+ =16 0, x 0 1( ) = − , !x 0 0( ) =
The general solution of the harmonic oscillator equation !!x x+ =16 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
4 44 4 4 4cos sin
! sin cos .
Substituting this expression into the initial conditions x 0 1( ) = − , !x 0 0( ) = , gives
x cx c
0 10 4 0
1
2
( ) = = −( ) = =!
so c1 1= − , c2 0= . Hence, the IVP has the solution
x t t( ) = −cos4 .
6. !!x x+ =16 0, x 0 0( ) = , !x 0 4( ) =
The general solution of the harmonic oscillator equation !!x x+ =16 0 is given by
x t c t c tx t c t c t( ) = +( ) = − +
1 2
1 2
4 44 4 4 4cos sin
! sin cos .
Substituting this expression into the initial conditions x 0 0( ) = , !x 0 4( ) = , we get
x cx c
0 00 4 4
1
2
( ) = =( ) = =!
so c1 0= , c2 1= . The IVP has the solution
x t t( ) = sin4 .
!!!! Computer Lab
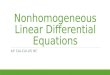
7. y t t= +cos sin
The equation tells us T = 2π and because
T =2πω
, ω0 1= . We then measure the delay
δω0
08≈ . which we can compute as the phase
angle δ ≈ ( ) =08 1 08. . . The amplitude A can be
measured directly giving A ≈ 14. . Hence,
cos sin . cos .t t t+ ≈ −( )14 08 .
Compare with the algebraically exact form inProblem 13.
π
–1.5
1.5
t
T = 2π
A ≈1.4δω≈ 0.8
y

256 CHAPTER 4 Second-Order Linear Differential Equations
8. y t t= +2cos sin
The equation tells us T = 2π and because
T =2πω
, ω0 1= . We then measure the delay
δω0
05≈ . , which we can compute as the phase
angle δ ≈ ( ) =05 1 05. . . The amplitude A can be
measured directly giving A ≈ 2 2. . Hence,
2 2 2 05cos sin . cos .t t t+ ≈ −( ).
8–4
–2.5
2.5
4
T = 2πA ≈2.2δ
ω≈ 0.5
y
t
9. y t t= +5 3 3cos sin
The equation tells us that period is T =23π and
because T =2πω
, ω0 3= . We then measure the
delay δω0
005≈ . , which we can compute as the
phase angle δ ≈ ( ) =3 0 05 015. . . The amplitude A
can be measured directly giving A ≈ 51. . Hence,
5 3 3 51 3 015cos sin . cos .t t t+ ≈ −( ) .
–5
5
tπ
T = 2π A ≈5.1
δω≈ 0.05
/3
y
10. y t t= +cos sin3 5 3
The equation tells us the period is T =23π and
because T =2πω
, ω0 3= . We then measure the
delay δω0
05≈ . , which we can compute as the
phase angle δ ≈ ( ) =05 3 15. . . The amplitude A can
be measured directly giving A ≈ 51. . Hence,
cos sin . cos .3 5 3 51 3 15t t t+ ≈ −( ).
3
–5
5 A ≈5.1
δω≈ 0.5
y
T = 2π /3
t

SECTION 4.1 The Harmonic Oscillator 257
11. y t t= − +cos sin5 2 5
equation tells us that period is T =25π and
because T =2πω
, ω0 5= . We then measure the
delay δω
π
0 804≈ or . , which we can compute as
the phase angle δ ≈ ( ) =5 0 4 2. . The amplitude A
can be measured directly giving A ≈ 2 2. . Hence,
− + ≈ −( )cos sin . cos5 2 2 2 5 2t t t .
–2
2
t21
y
A ≈2.2
δω≈ 0.4
T = 2π /5
!!!! Alternate Forms for Sinusoidal Oscillations
12. We have
A t A t t A t A tc t c t
cos cos cos cos cos cos cos sin sincos sin
ω δ ω δ ω δ δ ω δ ωω ω
0 0 0 0 0
1 0 2 0
− = + = ( ) + ( )= +
a f a f
where c A1 = cosδ , c A2 = sinδ .
!!!! Single-Wave Forms of Simple Harmonic Motion
13. cos sint t+
By Equation (5) c1 1= , c2 1= , and ω0 1= . By Equation (6)
A = 2 , δ π=
4
yielding
cos sin cost t t+ = −FH IK24π .
(Compare with solution to Problem 7.)
14. cos sint t−
By Equation (5) c1 1= , c2 1= − , and ω0 1= . By Equation (6)
A = 2 , δ π= −
4
yielding
cos sin cost t t− = +FHIK2
4π .
Because c1 is positive and c2 is negative the phase angle is in the 4th quadrant.

258 CHAPTER 4 Second-Order Linear Differential Equations
15. − +cos sint t
By Equation (5) c1 1= − , c2 1= , and ω0 1= . By Equation (6)
A = 2 , δ π=
34
yielding
− + = −FHIKcos sin cost t t2 3
4π .
Because c1 is negative and c2 is positive the phase angle is in the 2nd quadrant.
16. − −cos sint t
By Equation (5) c1 1= − , c2 1= − , and ω0 1= . By Equation (6)
A = 2 , δ π=
54
yielding
− − = −FHIKcos sin cost t t2 5
4π .
Because c1 and c2 are negative, the phase angle is in the 3rd quadrant.
!!!! Component Form of Harmonic Motion
Using cos cos cos sin sinA B A B A B+( ) = − , we write:
17. 2 2 2 2 2 2 2cos cos cos sin sin cost t t t−( ) = −( ) − −( ){ } = −π π π
18. cos cos cos sin sin cos sint t t t t+FHGIKJ =
FHGIKJ −
FHGIKJ = −
π π π3 3 3
12
32
19. 34
34 4
3 22
22
3 22
cos cos cos sin sin cos sin cos sint t t t t t t−FHGIKJ = −FHG
IKJ − −FHG
IKJ
RSTUVW = +RST
UVW= +
π π π l q
20. cos cos cos sin sin cos sin36
36
36
32
3 12
3t t t t t−FHGIKJ = −FHG
IKJ − −FHG
IKJ = +
π π π
!!!! Interpreting Oscillator Solutions
21. !!x x+ = 0, x 0 1( ) = , !x 0 0( ) =
Because ω0 1= , we know the natural frequency is 12π
and the period is 2π . Using the initial
conditions, we find the solution (see Problem 1)

SECTION 4.1 The Harmonic Oscillator 259
x t t( ) = cos ,
which tells us the amplitude is 1 and the phase angle δ = 0 radians.
22. !!x x+ = 0, x 0 1( ) = , !x 0 1( ) =
Because ω0 1= radians per second, we know the natural frequency is 12π
Hz (cycles per
second), and the periodic function is 2π . Using the initial conditions, we find the solution (seeProblem 2)
x t t( ) = −FH IK24
cos π ,
which tells us the amplitude is 2 and the phase angle is δ π=
4 radians.
23. !!x x+ =9 0, x 0 1( ) = , !x 0 1( ) =
Because ω0 3= radians per second, we know the natural frequency is 32π
Hz (cycles per
second), and the periodic function is 23π . Using the initial conditions, we find the solution (see
Problem 3)
x t tb g b g= −103
3cos δ
where δ = −tan 1 13
, which tells us the amplitude is
103
and the phase angle is
δ = ≈−tan .1 13
033 radians.
24. !!x x+ =4 0, x 0 1( ) = , !x 0 2( ) = −
Because ω0 2= radians per second, we know the natural frequency is 1π
Hz (cycles per second),
and the periodic function is π. Using the initial conditions, we find the solution (see Problem 4)
x t tb g = +FHGIKJ2 2
4cos π ,
which tells us the amplitude is 2 and the phase angle is δ π= −
4 radians.

260 CHAPTER 4 Second-Order Linear Differential Equations
25. !!x x+ =16 0, x 0 1( ) = − , !x 0 0( ) =
Because ω0 4= radians per second, we know the natural frequency is 2π
Hz (cycles per second),
and the periodic function is π2
. Using the initial conditions, we find the solution (see Problem 5)
x t t( ) = −( )cos 4 π ,
which tells us the amplitude is 1 and the phase angle is δ π= radians.
26. !!x x+ =16 0, x 0 0( ) = , !x 0 4( ) =
Because ω0 4= radians per second, we know the natural frequency is 2π
Hz (cycles per second),
and the periodic function is π2
. Using the initial conditions, we find the solution (see Problem 6)
x t tb g = −FHGIKJcos 4
2π ,
which tells us the amplitude is 1 and the phase angle is δ π=
2 radians.
!!!! Phase Portraits
All of the phase portraits are circles or ellipses. The phase portrait of !!x k x+ =2 0 are ellipses that aremore elongated in the !x direction when k > 1 and elongated in the x direction when k < 1. A curvepassing through x x k, ! , ( ) = 0 2b g will also pass through x x k, ! , ( ) = ( )0 .
27. !!x x+ = 0, x 0 1( ) = , !x 0 0( ) =
See Problems 1, 21.
Trajectories are circles centered at the origin,traversed clockwise. x
–1
1
(1, 0)
!x

SECTION 4.1 The Harmonic Oscillator 261
28. !!x x+ = 0, x 0 1( ) = , !x 0 1( ) =
See Problems 2, 22.
Trajectories are circles centered at the origin,traversed clockwise. x
–1
1 (1, 1)
!x
1–1
29. !!x x+ =9 0, x 0 1( ) = , !x 0 1( ) =
See Problems 3, 23.
Trajectories are ellipses centered at the origin,each with height thrice its width. Motion isclockwise.
x
–4
4
(1, 1)
!x
4–4
30. !!x x+ =4 0, x 0 1( ) = , !x 0 2( ) = −
See Problems 4, 24.
Trajectories are ellipses centered at the origin,each with height twice its width. Motion isclockwise.
x
–4
4
(1, –2)
!x
4–4
31. !!x x+ =16 0, x 0 1( ) = − , !x 0 0( ) =
See Problems 5, 25.
Trajectories are ellipses centered at the origin,each with height four times its width. Motion isclockwise.
x
–5
5!x
5–5(–1, 0)

262 CHAPTER 4 Second-Order Linear Differential Equations
32. !!x x+ =16 0, x 0 0( ) = , !x 0 4( ) =
See Problems 6, 26.
Trajectories are ellipses centered at the origin,each with height four times its width. Motion isclockwise.
x
–5
5!x
5–5
(0, 4)
!!!! Changing Frequencies
33. (a) ω 0 05= . gives tx curve with lowest fre-quency (fewest humps); ω 0 2= gives the
highest frequency (most humps).
(b) ω 0 05= . gives the innermost phase-planetrajectory; as ω 0 increases, the amplitude
of !x increases. In Figure 4.1.7 the trajec-tory that is not totally visible is the onefor ω0 2= .
3
–4
4x
t
2
–2
2ππ
ω0 05= . ω0 2=
ω0 1=
!!!! Detective Work
34. (a) The curve y t= −FHGIKJ14 8
5. cos π is a sinusoidal curve with period 2π , amplitude A ≈ 14. ,
and phase angle roughly 85π .
(b) From the graph we estimate ω0 1= , A ≈ 2 3. , and δ π≈
4. Thus, we have
x t A t t t t
t t t t
b g b g
b g
= − = −FHGIKJ = −FHG
IKJ − −FHG
IKJ
LNM
OQP
= +RST
UVW≈ +
cos . cos . cos cos sin sin
. cos sin . cos sin .
ω δ π π π0 0 2 3
42 3
4 4
2 3 22
22
16
!!!! Pulling a Weight
35. (a) The mass is m = 2 kg. Because a force of 8 nt stretches the spring 0.5 meters, we find
that k = =8
0516
.nt m . If we then release the weight, the IVP describing the motion of
the weight is 2 16 0!!x x+ = or

SECTION 4.1 The Harmonic Oscillator 263
!!x x+ =8 0, x 0 05( ) = . , !x 0 0( ) = .
The solution of the differential equation is
x t A t( ) = −cos 8 δd h.Using the initial conditions, we get the simple oscillation
x t t( ) = 05 8. cosd h.
(b) Amplitude = 12
m; T = =2 2
80
πω
π sec , f = 82π
cycles per second
(c) Setting cos 8 0td h = , we find that the weight will pass through equilibrium at 14
of the
period or after
t = ≈π
2 80 56. seconds.
At that time velocity is
! . sin . secx 0 56 22
1414b g = − FHGIKJ ≈ −
π m
moving away from original displacement.
!!!! Finding the Differential Equation
36. (a) The mass is m = 500 gm, which means the force acting on the spring is 500 980× dynes.This stretches the spring 50 cm, so the spring constant is
k = ×=
500 98050
9800 dynes cm.
The mass is then pulled down 10 cm from its initial displacement, giving x 0 10( ) = (as
long as we measure downward to be the positive direction, which is typical in theseproblems). The initial velocity of the mass is assumed to be zero, so !x 0 0( ) = . Thus, the
IVP for the mass is
500 9800 0!!x x+ =
or
5 98 0!!x x+ = , x 0 10( ) = , !x 0 0( ) = .
(b) The solution of the differential equation found in part (a) is
x t A t t( ) = −FHG
IKJ =cos cos98
510 98
5δ .

264 CHAPTER 4 Second-Order Linear Differential Equations
(c) In part (b) the amplitude is 10 cm, phase angle is 0, the period is
T mk
= = ≈2 2 598
14π π . sec,
and the natural frequency is given by the reciprocal f = =1
14071
.. oscillations per sec-
ond.
!!!! Initial-Value Problems
37. (a) The weight is 16 lbs, so the mass is roughly 1632
12
= slugs. This mass stretches the spring
12
foot, hence k = =16 3212
lb ft . This yields the equation 12
32 0!!x x( ) + = , or
!!x x+ =64 0.
The initial conditions are that the mass is pulled down 4 inches ( 13
foot) from equilib-
rium and then given an upward velocity of 4 ft sec. This gives the initial conditions of
x 0 13
( ) = ft, !x 0 4( ) = − ft/sec, using the engineering convention that for x, down is
positive.
(b) We have the same equation !!x x+ =64 0, but the initial conditions are x 0 16
( ) = − ft,
!x 0 1( ) = ft/sec.
!!!! One More Weight
38. The mass is m = =1232
38
slugs. The spring is stretched 12
foot, so the spring constant is
k = =12 2412
lb ft . The initial position of the mass is 4 inches ( 13
ft) upward so x 0 13
( ) = − . The
initial motion is 2 ft sec upward, and thus !x 0 2( ) = − . Hence, the equation for the motion of the
mass is
!!x x+ =64 0, x 0 13
( ) = − , !x 0 2( ) = − ,
which has the solution
x t t t( ) = − −13
8 14
8cos sin .

SECTION 4.1 The Harmonic Oscillator 265
Writing this in polar form, we have
A c c
cc
= + = −FH IK + −FH IK =
= FHGIKJ =
FH IK≈ ( )
− −
11
22
2 2
1 2
1
1
13
14
512
34
378 radians
δ tan tan
. . angle in 3rd quadrant
Hence, we have the solution in polar form
x t t( ) = −( )5
128 378cos . .
See figure.
1.4
–0.4
0.4
x
1.210.80.60.40.2t
x t t( ) = −( )512
8 378cos .
Spring oscillation
!!!! Comparing Harmonic Motions
39. The period of simple harmonic motion is given by T =2
0
πω
, where ω0 =km
. Notice that this
does not depend at all on our initial conditions. Period is the same so is the frequency, but theamplitude will be twice that in the first case.
!!!! Testing Your Intuition
40. !!x x x+ + =3 0
Here, we have a vibrating spring with no friction, but a nonlinear restoring force F x x= − − 3 thatis stronger than a purely proportional force F x= − . For small displacement x, the nonlinearrestoring force will not be much different (x3 is very small x), but for larger displacement it willbe much stronger. This equation is called Duffing’s (strong) equation, and you may contemplatethe motion of such springs, called strong springs.
41. !!x x x+ − =3 0
Here, we have a vibrating mass with no friction, but the restoring force is not purely proportionalto the displacement as when F x= − , but has an additional term F x x= − + 3. This means,compared with a linear restoring force −kx , this nonlinear restoring force will not be muchdifferent for small displacement (x3 is very small x), but will have a smaller restoring force forlarger vibration amplitude. (i.e., the spring weakens when it is stretched a lot, and in factbecomes zero when x = 1). This equation is called Duffing’s (weak) equation, and you maycontemplate the motion of such springs, called weak springs.

266 CHAPTER 4 Second-Order Linear Differential Equations
42. !!x x− = 0
This equation describes a spring with no friction and a negative restoring force. You may wonderif there are such physical systems. Later, we will see that this equation describes the motion of aninverted pendulum, and it has solutions sinh t and cosh t in contrast to !!x x+ = 0, which hassolutions sin t and cos t. The restoring force is always away from the equilibrium position, andhence the solution moves away from it.
43. !! !xt
x x+ + =1 0
This equation can be interpreted as describing the motion of a vibrating mass where the friction1t
x! starts very big when t = 0, but then dies off. Again, you many simulate in your mind the
motion of such a system. For large t, the motion will behave much like simple harmonic motion.
44. !! !x x x x+ − + =2 1 0b gThis is called van der Pol’s equation and describes oscillations (mostly electrical) where internalfriction depends on the value of the dependent variable x. Note that when − < <1 1x , we actuallyhave negative friction, so we would expect the system to move away from the zero solutionx t( ) ≡ 0 (note that this is a solution) in the direction of x t( ) = 1.
45. !!x tx+ = 0
Here, we have a vibrating spring with no friction, but the restoring force –tx gets stronger as timepasses.
!!!! LR-Circuit
46. (a) Without having a capacitor to store energy, we do not expect the current in the circuit tooscillate. If there had been a constant voltage V0 on in the past, we would expect the
current to be (by Ohm’s law) I VR
= 0 . If we then shut off the voltage, we would expect
the current to die off to zero in the presence of a resistance.
(b) If a current I passes through a resistor with resistance R, then the voltage drop is RI; thevoltage drop across an inductor of inductance is LI! . Hence, setting this sum equal to theconstant voltage source V0 gives the first-order differential equation
LI RI! + = 0.
Because the voltage was previously on, we know that the initial current had reached an
equilibrium of I VR
0 0( ) = .

SECTION 4.1 The Harmonic Oscillator 267
(c) The solution of LI RI! + = 0, I VR
0 0( ) = is
I t VR
e R L t( ) = −0 a f .
(d) If R = 40 ohms, L = 5 henries, V0 10= volts, then I t e t( ) = −14
8 ohms.
!!!! LC-Circuit
47. (a) With a nonzero initial current and no resistance, we do not expect the current to damp tozero. We would expect an oscillatory current due to the capacitor. Thus the charge on thecapacitor would oscillate indefinitely. The exact behavior depends on the initialconditions and the values of the inductance and capacitance.
(b) Kirchoff’s voltage law states that the sum of the voltage drops around the circuit is equalto the impressed voltage source. Hence, we have
LIC
I! + =z1 0
or, in terms of the charge across the capacitor, we have the IVP
LQC
Q!! + =1 0 , Q 0 0( ) = , !Q 0 5( ) = .
(c) The solution of the IVP is
Q ttLC
LC
( ) = 51
1
sine j.
This agrees with the oscillatory behavior predicted in part (a).
(d) With values L = 10 henries, C = −10 3 farads, the charge on the capacitor is
Q tt
t( ) = =5100
10012
10sin
sind h
.
!!!! A Pendulum Experiment
48. The pendulum equation is
!! sinθ θ+ =gL
0 .
For small θ, we can approximate sinθ θ≈ , giving the differential equation
!!θ θ+ =gL
0 .

268 CHAPTER 4 Second-Order Linear Differential Equations
This is the equation of simple harmonic motion with circular frequency ω0 =gL
, and natural
frequency f gL0
12
=π
. Hence, the period of motion is Tf
Lg
= =1 20
π .
TT
gg
earth
sun
sun
earth= = = ≈400 000 100 40 632, .
!!!! Circular Motion
49. Writing the motion in terms of polar coordinates r and θ and using the fact that the angularvelocity is constant, we have !θ ω= 0 (a constant). We also know the particle moves along a circle
of constant radius, which makes r a constant. We then have the relation x r= cosθ , and hence
! sin !
!! sin !! cos ! .x rx r r= −( )
= −( ) − ( )
θ θ
θ θ θ θ2
Because !!θ = 0, !θ ω= 0 , we arrive at the differential equation
!!x x+ =ω0 0.
!!!! Another Harmonic Motion
50. For simple harmonic motion the circular frequency ω0 is
ω 0
2
2=+
kRmR I
,
so the natural frequency f0 is
f kRmR I0
2
21
2=
+π.
!!!! Motion of a Buoy
51. The buoy moves in simple harmonic motion, so the period is
T mk
= = =2 7 2 20
. πω
π .
We have one equation in two unknowns, but the buoyancy equation yields the second equation.If we push the buoy down 1 foot, the force upwards will be F V= ρ , where V is the submerged
volume and ρ is the density of water. In this case, V r h= π 2 , r = =9 0 75 inches ft. , h = 1, and
ρ = 62 5. , so the force required to push the buoy down 1 foot is π 916
1 62 5 110( )( ) ≈. lbs. But k is
the force divided by distance, so k = =110
1110 lbs ft . Finally, solving for m in the equation for

SECTION 4.1 The Harmonic Oscillator 269
T, we get m kT=
2
24π, and plugging in all of our numbers, we arrive at m ≈ 20 4. slugs (see
Table 4.1.1. in the text.) The buoy weighs mg = ( )( ) =204 32 2 657. . lbs.
!!!! Factoring Out Friction
52. (a) Letting x t e X t X t e x tb m t b m tb g b g b g b gb g b g= ⇒ =− 2 2 , we have
! !
!! ! !! .
X t bm
e x t e x t
X t bm
e x t bm
e x t e x t
b m t b m t
b m t b m t b m t
b g b g b g
b g b g b g b g
b g b g
b g b g b g
= +
= + +
2
4
2 2
2
22 2 2
Plugging this into the original equation, we arrive at
mX k bm
X me x be x ke x
e mx bx kx
b m t b m t b m t
b m t
!! !! !
!! ! .
+ −FHG
IKJ = + +
= + + =
22 2 2
2
4
0
b g b g b g
b g
(b) If we assume k bm
− >2
40 , then the solution of this differential equation (after dividing by
m and letting
ω021
24= −
mmk b )
is
X t c t c t( ) = +1 0 2 0cos sinω ω .
Thus, we have
x t e X t e c t c tb m t b m t( ) = ( ) = +− −2 21 0 2 0
a f a f a fcos sinω ω .
!!!! Suggested Journal Entry
53. Student Project

270 CHAPTER 4 Second-Order Linear Differential Equations
4.2 Real Characteristic Roots
!!!! Real Characteristic Roots
1. ′′ =y 0
The characteristic equation is r2 0= , so there is double root at r = 0. Thus, the general solutionis
y t c e c te c c tt t( ) = + = +10
20
1 2 .
2. ′′ − ′ =y y 0
The characteristic equation is r r2 0− = , which has roots 0, 1. Thus, the general solution is
y t c c et( ) = +1 2 .
3. ′′ − =y y9 0
The characteristic equation is r2 9 0− = , which has roots 3, –3. Thus, the general solution is
y t c e c et t( ) = + −1
32
3 .
4. ′′ − =y y 0
The characteristic equation is r2 1 0− = , which has roots 1, –1. Thus, the general solution is
y t c e c et t( ) = + −1 2 .
5. ′′ − ′ + =y y y3 2 0
The characteristic equation is r r2 3 2 0− + = , which factors into r r−( ) −( ) =2 1 0, and hence has
roots 1, 2. Thus, the general solution is
y t c e c et t( ) = +1 22 .
6. ′′ − ′ − =y y y2 0
The characteristic equation is r r2 2 0− − = , which factors into r r−( ) +( ) =2 1 0, and hence has
roots 2, –1. Thus, the general solution is
y t c e c et t( ) = + −1
22 .

SECTION 4.2 Real Characteristic Roots 271
7. ′′ + ′ + =y y y2 0
The characteristic equation is r r2 2 1 0+ + = , which factors into r r+( ) +( ) =1 1 0, and hence has
the double root –1, –1. Thus, the general solution is
y t c e c tet t( ) = +− −1 2 .
8. 4 4 0′′ − ′ + =y y y
The characteristic equation is 4 4 1 02r r− + = , which factors into 2 1 2 1 0r r−( ) −( ) = , and hence
has the double root 12
, 12
. Thus, the general solution is
y t c e c tet t( ) = +12
22.
9. 2 3 0′′ − ′ + =y y y
The characteristic equation is 2 3 1 02r r− + = , which factors into 2 1 1 0r r−( ) −( ) = , and hence
has roots 12
, 1. Thus, the general solution is
y t c e c et t( ) = +12
2 .
10. ′′ − ′ + =y y y6 9 0
The characteristic equation is r r2 6 9 0− + = , which factors into r r−( ) −( ) =3 3 0, and hence has
the double root 3, 3. Thus, the general solution is
y t c e c tet tb g = +13
23 .
11. ′′ − ′ + =y y y8 16 0
The characteristic equation is r r2 8 16 0− + = , which factors into r r−( ) −( ) =4 4 0, and hence has
the double root 4, 4. Thus, the general solution is
y t c e c tet t( ) = +14
24 .
12. ′′ − ′ − =y y y6 0
The characteristic equation is r r2 6 0− − = , which factors into r r+( ) −( ) =2 3 0, and hence has
roots –2, 3. Thus, the general solution is
y t c e c et t( ) = +−1
22
3 .

272 CHAPTER 4 Second-Order Linear Differential Equations
13. ′′ + ′ − =y y y2 0
The characteristic equation is r r2 2 1 0+ − = , which factors into r r+ − + + =1 2 1 2 0e je j , and
hence has roots − +1 2 , − −1 2 . Thus, the general solution is
y t e c e c et t t( ) = +− −1
22
2d i.14. 9 6 0′′ + ′ + =y y y
The characteristic equation is 9 6 1 02r r+ + = , which factors into 3 1 02r +( ) = , and hence has the
double root − 13
, − 13
. Thus, the general solution is
y t c e c tet t( ) = +− −1
32
3.
!!!! Initial Values Specified
15. ′′ − =y y25 0, y 0 1( ) = , ′( ) =y 0 0
The characteristic equation of the differential equation is r2 25 0− = , which factors intor r−( ) +( ) =5 5 0, and thus has roots 5, –5. Hence,
y t c e c et t( ) = + −1
52
5 .
Substituting in the initial conditions y 0 1( ) = gives c c1 2 1+ = . Plugging in !y 0 0( ) = gives
5 5 01 2c c− = . Solving for c1, c2 gives c c1 212
= = . Thus the general solution is
y t e et t( ) = + −12
12
5 5 .
16. ′′ + ′ − =y y y2 0, y 0 1( ) = , ′( ) =y 0 0
The characteristic equation of the differential equation is r r2 2 0+ − = , which factors intor r+( ) −( ) =2 1 0, and thus has roots 1, –2. Thus, the general solution is
y t c e c et t( ) = +−1
22 .
Substituting into y 0 1( ) = , ′( ) =y 0 0 yields c113
= , c223
= , so
y t e et t( ) = +−13
23
2 .
17. ′′ + ′ + =y y y2 0, y 0 0b g = , ′( ) =y 0 1
The characteristic equation is r r2 2 1 0+ + = , which factors into r r+( ) +( ) =1 1 0, and hence has
the double root –1, –1. Thus, the general solution is
y t c e c tet t( ) = +− −1 2 .

SECTION 4.2 Real Characteristic Roots 273
Substituting into y 0 0b g = , ′( ) =y 0 1 yields c1 0= , c2 1= , so
y t te t( ) = − .
18. ′′ − =y y9 0, y 0 1( ) = − , ′( ) =y 0 0
The characteristic equation is r2 9 0− = , which factors into r r−( ) +( ) =3 3 0, and hence has roots
are 3, –3. Thus, the general solution is
y t c e c et t( ) = + −1
32
3 .
Substituting into y 0 1( ) = − , ′( ) =y 0 0 yields c c1 212
= = − , so
y t e et t( ) = − − −12
12
3 3 .
19. ′′ − ′ + =y y y6 9 0, y 0 0( ) = , ′( ) = −y 0 1
The characteristic equation is r r2 6 9 0− + = , which factors into r r−( ) −( ) =3 3 0, and hence has
the double root 3, 3. Thus, the general solution is
y t c e c tet t( ) = +13
23 .
Substituting into y 0 0( ) = , ′( ) = −y 0 1 yields c1 0= , c2 1= − , so
y t te t( ) = − 3 .
20. ′′ + ′ − =y y y6 0, y 0 1( ) = , ′( ) =y 1 1
The characteristic equation is r r2 6 0+ − = , which factors into r r+( ) −( ) =3 2 0, and hence has
roots –3, 2. Thus, the general solution is
y t c e c et t( ) = +−1
32
2 .
Substituting into y 0 1( ) = , ′( ) =y 1 1 yields c115
= , c245
= , so
y t e et t( ) = +−15
45
3 2 .
!!!! Phase Portraits
Careful inspection shows
21. (B) 22. (D) 23. (A) 24. (C)

274 CHAPTER 4 Second-Order Linear Differential Equations
!!!! Linking Graphs
After inspection, we have labeled the yt and ′y t graphs as follows.
25.
–5
y
3t
–5
5
y'
3t
–5
5
y'
5y
–5
12
3
4
1
2
3
44
1 32
t = 0
26.
–5
5
y
3t
–5
5
y'
3t
–5
5
y'
5y
–5
4
1
3
2
1
2
34
1
2
3 4
t = 0
27.
–5
5
y
3t
–5
5
y'
3t
3
–5
5
y'
5y
–5
1
2
3
4
32
41
4
1
2
3
t = 0
!!!! Independent Solutions
28. Letting
c e c er t r t1 21 2 0+ =
for all t, then by setting t = 0 and t =1 we have, respectively
c cc e c er r1 2
1 2
001 2
+ =+ = .

SECTION 4.2 Real Characteristic Roots 275
When r r1 2≠ then these equations have the unique solution c c1 2 0= = , which shows the givenfunctions e er t r t1 2, are linearly independent for r r1 2≠ .
!!!! Second Solution I
29. Substituting y v t e bt a= ( ) − 2 into
ay by cy′′ + ′ + = 0
gives
′ = ′ −
′′ = ′′ − ′ +
− −
− − −
y v e ba
ve
y v e ba
v e ba
ve
bt a bt a
bt a bt a bt a
2 2
2 22
22
2
4.
Substituting v v v, ,′ ′′ into the differential equation gives the new equation (after dividing by
e bt a− 2 )
a v ba
v ba
v b v ba
v cv′′ − ′ +FHG
IKJ + ′ −FH
IK + =
2
24 20 .
Simplifying gives
av ba
c v′′ − −FHGIKJ =
2
40 .
Because we have assumed b ac2 4= , we have the equation ′′ =v 0, which was the condition to beproven.
!!!! Independence Again
30. Setting
c e c tebt a bt a1
22
2 0− −+ =
for all t, we set in particular t = 0 and then 1. This yields, respectively, the equations
cc e c eb a b a
1
12
22
00
=
+ =− −
which have the unique solution c c1 2 0= = . Hence, the given functions are linearly independent.
!!!! Repeated Roots, Long-Term Behavior
31. Because e bt a− 2 approaches 0 as t →∞ (for a, b > 0), we need only verify that
te te
bt abt a
− = →22 0

276 CHAPTER 4 Second-Order Linear Differential Equations
does as well. Using l’Hopital’s rule, we compute the derivatives of both the numerator and de-nominator of the previous expression, getting
1
22b
abt ae
,
which clearly approaches 0 as t →∞ . Using l’Hopital’s rule, the given expression
12ebt a
approaches 0 as well.
!!!! Negative Roots
32. We have r b b mk= − ± −2 4 , so in the overdamped case where b mk2 4 0− > , these characteristicroots are real. Because m and k are both nonnegative, b mk b2 24− < causing
r b b mk12 4= − + − to be a negative sum of negative and positive terms
and
r b b mk22 4= − − − to be a negative sum of two negative terms.
!!!! Circuits and Springs
33. (a) The LRC equation is LQ RQC
Q!! !+ + =1 0 , hence the following discriminate conditions
hold:
∆
∆
∆
= − < ( )
= − = ( )
= − > ( )
R LC
R LC
R LC
2
2
2
4 0
4 0
4 0
underdamped
critically damped
overdamped .
(b) The conditions in part (a) can be written
R LC
R LC
R LC
< ( )
= ( )
> ( )
4
4
4
underdamped
critically damped
overdamped .
These correspond to the analogy that m, b, and k correspond respectively to L, R, and 1C
.
(see Table 4.1.3 in the textbook.)

SECTION 4.2 Real Characteristic Roots 277
!!!! Alternate Solution Form
34. The characteristic equation is r2 1 0− = , which has roots of 1, –1. Hence, the general solution is
y t c e c et t( ) = + −1 2 .
But
sinh
cosh
t e e
t e e
t t
t t
= −
= +
−
−
1212
b g
b g
so we can solve for
e t te t t
t
t
= +
= −−
cosh sinhcosh sinh .
Thus, the general solution can be written
y t c e c e c t t c t tC t C t
t t( ) = + = +( ) + −( )= +
−1 2 1 2
1 2
cosh sinh cosh sinhsinh cosh
where C c c1 1 2= − , C c c2 1 2= + .
!!!! The Euler-Cauchy Equation at at y bty cy2 0′′ + ′ + =
35. Let y t tr( ) = , so
′ =
′′ = −( )
−
−
y rty r r t
r
r
1
21 .
Hence
at y bty cy ar r t brt ctr r r2 1 0′′ + ′ + = −( ) + + = .
Dividing by tr yields the characteristic equation
ar r br c−( ) + + =1 0,
which can be written as
ar b a r c2 0+ −( ) + = .
If r1 and r2 are two distinct roots of this equation, we have solutions
y t ty t t
r
r1
2
1
2
( ) =
( ) = .

278 CHAPTER 4 Second-Order Linear Differential Equations
Because these two functions are clearly linearly independent (one not a constant multiple of theother) for r r1 2≠ , we have
y t c t c tr r( ) = +1 21 2
for t > 0 .
!!!! The Euler-Cauchy Equation with Distinct Roots
For Problems 36–40, see Problem 35 for the unusual form of the characteristic equation.
36. t y ty y2 2 12 0′′ + ′ − =
In this case a = 1, b = 2 , c = −12, so the characteristic equation is
r r r r r r r−( ) + − = + − = +( ) −( ) =1 2 12 12 4 3 02 .
Hence, we have roots r1 4= − , r2 3= , and thus
y t c t c t( ) = + −1
32
4 .
37. 4 8 3 02t y ty y′′ + ′ − =
In this case a = 4, b = 8, c = −3, so the characteristic equation is
4 1 8 3 4 4 3 2 1 2 3 02r r r r r r r−( ) + − = + − = −( ) +( ) = .
Hence, we have roots r112
= , r232
= − , and thus
y t c t c t( ) = + −1
1 22
3 2 .
38. t y ty y2 4 2 0′′ + ′ + =
In this case a = 1, b = 4 , c = 2, so the characteristic equation is
r r r r r r r−( ) + + = + + = +( ) +( ) =1 4 2 3 2 1 2 02 .
Hence, we have roots r1 1= − , r2 2= − , and thus
y t c t c t( ) = +− −1
12
2 .
39. 2 3 02t y ty y′′ + ′ − =
In this case a = 2, b = 3, c = −1, so the characteristic equation is
2 1 3 1 2 1 2 1 1 02r r r r r r r−( ) + − = + − = −( ) +( ) = .
Hence, we have roots r112
= , r2 1= − , and thus
y t c t c t( ) = + −1
1 22
1.

SECTION 4.2 Real Characteristic Roots 279
!!!! Repeated Euler-Cauchy Roots
40. We are given that the characteristic equation
ar b a r c2 0+ −( ) + =
of Euler’s equation
at y bty cy2 0′′ + ′ + =
has a double root of r. Hence, we have one solution y tr1 = . To verify that t tr ln is also a
solution, we differentiate ′ = +− −y rt t tr r1 1ln ,
′′ = −( ) + + −( ) = −( ) + −( )− − − − −y r r t t rt r t r r t t r tr r r r r1 1 1 2 12 2 2 2 2ln ln .
By direct substitution we have
at y bty cy at r r t t r t bt rt t t ct t
ar r br c t t a r b t
r r r r r
r r
2 2 2 2 1 11 2 1
1 2 1
′′ + ′ + = −( ) + −( ) + + +
= −( ) + + + −( ) +
− − − −ln ln ln
ln .
We know that ar r br c−( ) + + =1 0, so this last expression becomes simply
at y bty cy a r b tr2 2 1′′ + ′ + = −( ) + .
But the root of the characteristic equation is r b aa
= −−2
, which makes this expression zero.
To verify that tr and t tr ln are linearly independent (where r is the double root of the
characteristic equation, which is r b a= −
−2
), we set
c t c t tr r1 2 0+ =ln
for specific values t = 1 and 2, which give, respectively, the equations
cc cr r
1
1 2
02 2 2 0
=
+ =ln
and yields the unique solution c c1 2 0= = . Hence, tr and t tr ln are linearly independent solutions.
!!!! Solutions for Repeated Euler-Cauchy Roots
For Problems 41 and 42 use the result of Problem 40, y t C t C t tr r( ) = +1 2 ln .
41. t y ty y2 5 4 0′′ + ′ + =
In this case, a = 1, b = 5, and c = 4, so our characteristic equation for r is r r2 4 4 0+ + = , andhence it has a double root at –2. The general solution is
y t c t c t t( ) = +− −1
22
2 ln
for t > 0 .

280 CHAPTER 4 Second-Order Linear Differential Equations
42. t y ty y2 3 4 0′′ − ′ + =
In this case, a = 1, b = −3, and c = 4, so our characteristic equation for r is r r2 4 4 0− + = , andhence it has a double root at 2. The general solution is
y t c t c t t( ) = +12
22 ln
for t > 0 .
!!!! Third-Order Euler-Cauchy
43. (a) The third-order Euler Cauchy equation has the form at y bt y cty dy3 2 0′′′ + ′′ + ′ + = .Substitute y tr= t >( )0 to obtain the characteristic equation
′ =
′′ = −( )
′′′ = −( ) −( )
−
−
−
y rty r r ty r r r t
r
r
r
1
2
3
11 2
Substitute these equations into the third-order Euler Cauchy equation above to obtain:
at r r r t bt r r t ctrt dtat r r r bt r r ct r dt
r r r r
r r r r
3 3 2 2 11 2 1 01 2 1 0
−( ) −( ) + −( ) + + =
−( ) −( ) + −( ) + + =
− − −
Dividing by tr , we obtain the characteristic equation:
ar r r br r cr d−( ) −( ) + −( ) + + =1 2 1 0
(b) t y t y ty y3 2 2 2 0′′′ + ′′ − ′ + = has Euler-Cauchy characteristic equation:
r r r r r rr r r r r r
r r r
−( ) −( ) + −( ) − + =
− + + − − + =
− − + =
1 2 1 2 2 03 2 2 2 0
2 2 0
3 2 2
3 2
Note: r = 1 is a zero of the polynomial f r r r r( ) = − − +3 22 2 because
f 1 1 2 1 2 0( ) = − − + = .
Therefore r −1 is a factor of r r r3 22 2− − + . r r r r r r3 22 2 1 1 2− − + = −( ) +( ) −( ) sor = 1, –1, 2. Solution: y t c t c t c t( ) = + +−
1 21
32 for t >( )0 .
!!!! A Test of Your Intuition
44. Intuitively, a curve whose rate of increase is proportional to its height will increase very rapidlyas the height increases. On the other hand, upward curvature doesn’t necessarily imply that thefunction is increasing! (The curve e t− has upward curvature, yet decreases to 0 as t →∞ .) In thiscase, the restriction that ′( ) =y 0 0 will cause the second curve to increase, but probably not nearly

SECTION 4.2 Real Characteristic Roots 281
as rapidly as the first curve. Solving the equations, the IVP ′ =y y , y 0 1( ) = has the solutiony et= , whereas the second curve described by ′′ =y y , y 0 1( ) = , ′( ) =y 0 0 has the solution
y t e et t( ) = + −12
12
.
The first curve is indeed above the second curve.
!!!! An Overdamped Spring
45. (a) The solution of an overdamped equation has the form
x t c e c er t r tb g = +1 21 2 .
Suppose that
c e c er t r t1 2
1 1 2 1 0+ =
for some t1 . Because er t2 1 is never zero, we can divide by er t2 1 to get c e cr r t1 21 2 1 0− + =a f .
Solving for t1 gives
tr r
cc1
1 2
2
1
1=
−−ln .
This unique number is the only value for which the curve may pass through 0. If theargument of the logarithm is negative or if the value of t1 is negative, then the solution
does not cross the equilibrium point.
(b) By a similar argument, we can show that the derivative !x t( ) also has one zero.
!!!! A Critically Damped Spring
46. (a) Suppose
c c t er t1 2 1 1 1 0+ =a f .
We can divide by the nonnegative quantity er t1 1 getting the equation c c t1 2 1 0+ = , which
has the unique solution t cc1
1
2= − . Hence, the solution of a critically damped equation can
pass through the equilibrium at most once. If the value of t1 is negative, then the solution
does not cross the equilibrium point.
(b) By a similar argument, we can show that the derivative !x t( ) has one zero.

282 CHAPTER 4 Second-Order Linear Differential Equations
!!!! Damped Vibration
47. The IVP problem is
!! !x x x+ + =2 0, x 0 3 14
( ) = = in ft , !x 0 0 ( ) = ft sec .
The solution is
x t e tet t( ) = +− −14
14
.
This is zero only for t1 1= − , whereas the physical system does not start before t = 0.
!!!! LRC-Circuit I
48. (a) LQ RQC
Q Q Q Q!! ! !! !+ + = + + =1 2 101 50 0 , Q 0 99( ) = , !Q 0 0( ) =
(b) Q t e et t( ) = − +− −50 2100 (c) I t Q t e et t( ) = ( ) = −− −! 50 5050 2
(d) As t →∞ , Q t( )→ 0 and I t( )→ 0
!!!! LRC-Circuit II
49. (a) LQ RQC
Q Q Q Q!! ! !! !+ + = + + =1 15 50 0 , Q 0 5( ) = , !Q 0 0( ) =
(b) Q t e et t( ) = −− −10 55 10 (c) I t Q t e et tb g b g= = − +− −! 50 505 10
(d) As t →∞ , Q t( )→ 0 and I t( )→ 0
!!!! Computer: Phase-Plane Trajectories
50. (a) y t e et t( ) = +− −2 3
The roots of the characteristic equation are –1 and –3, so the characteristic equation is
r r r r+( ) +( ) = + + =1 3 4 3 02 .
y t( ) satisfies the differential equation
′′ + ′ + =y y y4 3 0.
(b) To find the IC for the trajectory of y t( ) in yy′ space we differentiate y t( ) , getting
′( ) = − −− −y t e et t2 3 3 .
The IC of the given trajectory of y t y t( ) ′( )( ), in yy′ space is y y0 0 3 5( ) ′( )( ) = −( ), , .

SECTION 4.2 Real Characteristic Roots 283
(b) To find the IC for the trajectory of y t( ) inyy′ space we differentiate y t( ) , getting
′( ) = − −− −y t e et t2 3 3
The IC of the given trajectory of
y t y t( ) ′( )( ),
in yy′ space is y y0 0 3 5( ) ′( )( ) = −( ), , .
(c) We plot the trajectory starting at 3 5, −( )
along with a few other trajectories in yy′
space.
y
–4
4
!y
4–4 2–2
2
–2
(3, –5)
DE solutions in yy′ space
51. y t e et t( ) = +− −8
(a) The roots of the characteristic equation are –1 and –8, so the characteristic equation is
r r r r+( ) +( ) = + + =1 8 9 8 02 .
y t( ) satisfies the differential equation
′′ + ′ + =y y y9 8 0.
(b) The derivative is
′( ) = − −− −y t e et t8 8 .
The IC for the given trajectory in yy′
space is
y y0 0 2, 9( ) ′( )( ) = −( ), .
(c) We plot this trajectory in yy′ space.
–10 10
–10
10
y
y'
(2,-9)
DE solutions in yy′ space
52. y t e et t( ) = + −
(a) The roots of the characteristic equation are 1 and –1, so the characteristic equation is
r r r−( ) +( ) = − =1 1 1 02 .
y t( ) satisfies the differential equation
′′ − =y y 0.

284 CHAPTER 4 Second-Order Linear Differential Equations
(b) The derivative is
′ = − −y t e et tb g .
The IC for the given trajectory in yy′
space is
y y0 0 2, 0( ) ′( )( ) = ( ), .
(c) We plot this and a few other trajectoriesof this DE in yy′ space.
y
–4
!y
4–4 2–2
2
–2
4
(2, 0)
DE solutions in yy′ space
53. y t e tet t( ) = +− −
(a) The characteristic equation has a double root at –1, so the characteristic equation is
r r r+( ) = + + =1 2 1 02 2 .
y t( ) satisfies the differential equation
′′ + ′ + =y y y2 0.
(b) The derivative is
′( ) = − −y t te t .
The IC for the given trajectory in yy′
space is
y y0 1 0 0( ) = ′( ) =, .
(c) See the figure to the right.
–1.5 1 1.5
–1.5
1.5
y(1, 0)
y'
DE solutions in yy′ space
54. y t e t( ) = +3 2 2
(a) The roots of the characteristic equation are 0 and 2, so the characteristic equation is
r r r r−( ) = − =2 2 02 .
y t( ) satisfies the differential equation
′′ − ′ =y y2 0.

SECTION 4.2 Real Characteristic Roots 285
(b) The derivative is
′( ) =y t e t4 2 .
The IC for the given trajectory in yy′
space is
y y0 0 5 4( ) ′( )( ) = ( ), , .
(c) See the figure to the right.
y
–8
!y
8–8 4–4
–4
4
8
(5, 4)
DE solutions in yy′ space
!!!! Reduction of Order
55. (a) Let y vy2 1= and
′ = ′ + ′′′ = ′′ + ′ ′ + ′′
y v y vyy v y v y vy
2 1 1
2 1 1 12 .
Then
′′ + ( ) ′ + ( ) = ′′ + ′ ′ + ′ + ′′+ ′ + =y p x y q x y v y v y pv y vy pvy qvy2 2 2 1 1 1 1 1 12 0a f .
Because ′′+ ′ + =y py qy1 1 1 0, cancel the terms involving v, and arrive at the new equationy v y p x y v1 1 12 0′′ + ′ + ( ) ′ =a f
(b) Setting ′ =v w
y w y p x y w
w y p x yy
w
dww
y p x yy
dx
w yy
p x dx
wy
dy p x dx
w y p x dx
w ey
v
v ey
p x dx
p x dx
1 1 1
1 1
1
1 1
1
1
11
12
12
12
2 0
2 0
2
2
2
′ + ′ + ( ) =
′ +′ + ( )F
HGIKJ =
=− ′ − ( )FHG
IKJ
=− ′ − ( )FHG
IKJ
=−
− ( )
= − ( )
= ±z
= ′
= ±z
zz zz
z
−
− ( )
− ( )
a f
ln
ln
ln ln
By convention, the positive sign is chosen.

286 CHAPTER 4 Second-Order Linear Differential Equations
(c) If v is a constant function on I, then ′ ≡v 0 and w ≡ 0 because ′ =v w . The conditionw ≡ 0 contradicts our work in part (b) as ln w where w = 0 is undefined. Because v isnot constant on I, y y1 2, k p is a linearly independent set of I.
!!!! Second Solution II
56. ′′ − ′ + =y y y6 9 0, y e t1
3=
We identify p t( ) = −6, so
p t dt t( ) = −z 6 .
Plugging in the formula developed in Problem 55, we have
y y ey t
dt e ee
dt tep t dt
tt
tt
2 112
36
3 23=
z( )
= =− ( )z z b g .
57. ′′ − ′ + =y y y4 4 0 , y e t1
2=
We won’t use the formula this time. We simply redo the steps in Problem 55. We seek a secondsolution of the form y vy ve t
2 12= = . Differentiating, we have
′ = ′ +
′′ = ′′ + ′ +
y v e vey v e v e ve
t t
t t t2
2 2
22 2 2
24 4 .
Plugging into the equation we obtain
′′− ′ + = ′′ =y y y v e t2 2 2
24 4 0 .
Dividing by e t2 gives ′′ =v 0 or
v t c t c( ) = +1 2.
Hence, we have found new solutions
y ve c te c et t t2
21
22
2= = + .
Because y e t1
2= , we let c1 1= , c2 0= , yielding a second independent solution
y te t2
2= .
58. t y ty y2 0′′ − ′ + = , y t1 =
We won’t use the formula this time. We simply redo the steps in Problem 55. We seek a secondsolution of the form y vy tv2 1= = . Differentiating, we have
′ = ′ +′′ = ′′ + ′
y tv vy tv v
2
2 2 .

SECTION 4.2 Real Characteristic Roots 287
Plugging into the equation we obtain
t y ty y t v t v22 2 2
3 2 0′′ − ′ + = ′′ + ′ = .
Letting w v= ′ and dividing by t3 yields
′ + =wt
w1 0 .
We can solve by integrating the factor method, getting w c t= −1
1. Integrating we find
v c t c= +1 2ln ,
so
y tv c t t c t2 1 2= = +ln .
Letting c1 1= , c2 0= , we get a second linearly independent solution
y t t2 = ln .
59. t y ty y2 1 2 2 0+ ′′ − ′ + =b g , y t1 =
We won’t use the formula this time. We simply redo the steps in Problem 55. We seek a secondsolution of the form y vy tv2 1= = . Differentiating yields
′ = ′ +′′ = ′′ + ′
y tv vy tv v
2
2 2 .
Plugging into the equation we get
t y ty y t t v v22 2 2
21 2 2 1 2 0+ ′′ − ′ + = + ′′ + ′ =b g b g .
Letting w v= ′ and dividing by t t2 1+b g, we can solve the new equation using the integrating
factor method, getting
21
1 212
22
2t tdt t t t
t+= − + + =
+z b g b gln ln ln .
We arrive at
w c tt
c c t=+
= + −1
2
2 1 121 .
Integrating this, we get
v c t t c= − +−1
12b g ,
so
y tv c t c t2 12
21= = − +b g .

288 CHAPTER 4 Second-Order Linear Differential Equations
Letting c1 1= , c2 0= we get a second linearly independent solution
y t22 1= − .
!!!! Classical Equations
60. ′′ − ′ + =y ty y2 4 0 , y t t121 2( ) = − (Hemite’s Equation)
Letting y vy v t2 121 2= = −b g, we have
′ = − ′ −
′′ = − ′′ − ′ −
y t v tv
y t v tv v2
2
22
1 2 4
1 2 8 4
b gb g
and perform the long division, yielding the equation
′′ + − +−
FH
IK ′ =v t t
tv2 8
2 102 .
Letting w v= ′ and solving the first-order equation in w, we get
w c e tt= − −1
2 22 2 1b g .
To find y2 we simply let c1 1= and integrate to get
v e t dtt= −z −2 2 12 2b g .
Multiplying by 1 2 2− tb g yields a final answer of
y t t e t dtt2
2 2 21 2 2 1
2b g d i d i= − −z −.
61. 1 02− ′′ − ′ + =t y ty yb g , y t t1( ) = (Chebyshev’s Equation)
Letting y vy vt2 1= = , we have
′ = ′ +y tv v2 , ′′ = ′′ + ′y tv v2 2 ,
hence we have the equation
1 1 2 3 022 2 2
2 2− ′′ − ′ + = − ′′ + − ′ =t y ty y t t v t vb g b g b g .
Dividing by t t1 2−b g and letting w v= ′ , yields
′ +−−
=w tt t
w2 31
02
2b g .
Using partial fractions yields
2 31
2 12
1 12
12
2−−
= + − + +z tt t
dt t t tb g ln ln ln ,

SECTION 4.2 Real Characteristic Roots 289
so our integrating factor is t t2 21− or
w ct t
=−
1 2 2
11
.
Letting c1 1= and multiplying by t yields a final answer of
y t tv tt t
dt2 2 2
11
( ) = =−
z .
This is a perfect example of a formula that does not tell us much about how the solutions behave.Check out the IDE tool Chebyshev’s Equation to see the value of graphical solutions.
62. ty t y y′′ + −( ) ′ + =1 0, y t t1 1( ) = − (Laguerre’s Equation)
Letting y vy v t2 1 1= = −( ) , we have
′ = ′ −( ) +y v t v2 1 , ′′ = ′′ −( ) + ′y v t v2 1 2 ,
hence we have the equation
ty t y y t t v t t v′′+ − ′ + = − ′′ + − + − ′ =2 221 1 4 1 0b g b g d i .
Dividing by t t −( )1 and letting w v= ′ yields
′ +− + −
−=w t t
t tw
2 4 11
0b g .
Hence
w C et t
t
=−1 21( )
.
Letting c1 1= and multiplying by t −1 yields a final answer of
y t v t t et t
dtt
2 21 11
b g b g b g b g= − = −−z .
!!!! Suggested Journal Entry
63. Student Project

290 CHAPTER 4 Second-Order Linear Differential Equations
4.3 Complex Characteristic Roots
!!!! Solutions in General
1. ′′ + =y y9 0
The characteristic equation is r2 9 0+ = , which has roots 3i, –3i. The general solution is
y t c t c t( ) = +1 23 3cos sin .
2. ′′ + ′ + =y y y 0
The characteristic equation is r r2 1 0+ + = , which has roots − ±12
32
i . The general solution is
y t e c t c tt( ) = +FHG
IKJ
− 21 2
32
32
cos sin .
3. ′′ − ′ + =y y y4 5 0
The characteristic equation is r r2 4 5 0− + = , which has roots 2 ± i . The general solution is
y t e c t c tt( ) = +21 2cos sina f .
4. ′′ + ′ + =y y y2 8 0
The characteristic equation is r r2 2 8 0+ + = , which has roots − ±1 7i . The general solution is
y t e c t c tt( ) = +−1 27 7cos sind h .
5. ′′ + ′ + =y y y2 4 0
The characteristic equation is r r2 2 4 0+ + = , which has roots − ±1 3i . The general solution is
y t e c t c tt( ) = +−1 23 3cos sind h.
6. ′′ − ′ + =y y y4 7 0
The characteristic equation is r r2 4 7 0− + = , which has roots 2 3± i . The general solution is
y t e c t c tt( ) = +21 23 3cos sind h .
7. ′′ − ′ + =y y y10 26 0
The characteristic equation is r r2 10 26 0− + = , which has roots 5+ i . The general solution is
y t e c t c tt( ) = +51 2cos sina f.

SECTION 4.3 Complex Characteristic Roots 291
8. 3 4 9 0′′ + ′ + =y y y
The characteristic equation is 3 4 9 02r r+ + = , which has roots − ±23
233
i . The general solution
is
y t e c t c tt( ) = +FHG
IKJ
−2 31 2
233
233
cos sin .
9. ′′ − ′ + =y y y 0
The characteristic equation is r r2 1 0− + = , which has roots 12
32
± i . The general solution is
y t e c t c tt( ) = +FHG
IKJ
21 2
32
32
cos sin .
10. ′′ + ′ + =y y y2 0
The characteristic equation is r r2 2 0+ + = , which has roots − ±12
72
i . The general solution is
y t e c t c tt( ) = +FHG
IKJ
− 21 2
72
72
cos sin .
!!!! Initial-Value Problems
11. ′′ + =y y4 0 , y 0 1( ) = , ′( ) = −y 0 1
The characteristic equation is r2 4 0+ = , which has roots ±2i . The general solution is
y t c t c t( ) = +1 22 2cos sin .
Plugging this into the initial conditions gives y c0 11( ) = = , ′( ) = = −y c0 2 12 . Hence, the solution
of the initial-value problem is
y t t t( ) = −cos sin2 12
2 .
12. ′′ − ′ + =y y y4 13 0, y 0 1( ) = , ′( ) =y 0 0
The characteristic equation is r r2 4 13 0− + = , which has roots 2 3± i . The general solution is
y t e c t c tt( ) = +21 23 3cos sina f .
Plugging this into the initial conditions yields y c0 11( ) = = , ′( ) = + =y c c0 2 3 01 2 , resulting in
c1 1= , c223
= − . Hence, the solution of the initial-value problem is
y t e t tt( ) = −FH IK2 3 23
3cos sin .

292 CHAPTER 4 Second-Order Linear Differential Equations
13. ′′ + ′ + =y y y2 2 0 , y 0 1( ) = , ′( ) =y 0 0
The characteristic equation is r r2 2 2 0+ + = , which has roots − ±1 i . Hence, the general solutionis
y t e c t c tt( ) = +−1 2cos sina f .
Plugging this into the initial conditions yields y c0 11( ) = = , ′( ) = − =y c c0 01 2 , resulting in c1 1= ,c2 1= . Hence, the solution of the initial-value problem is
y t e t tt( ) = +( )− cos sin .
14. ′′ − ′ + =y y y 0 , y 0 0( ) = , ′( ) =y 0 1
From Problem 6,
y t e c t c tt( ) = ( )LNMOQP + ( )
LNMOQP
RSTUVW
21 2
32
32
cos sin .
Plugging this into the initial conditions yields y 0 0( ) = , ′( ) =y 0 1, resulting in c1 0= , c223
3= .
Hence, the solution of the initial-value problem is
y t e tt( ) =FHGIKJ
−23
3 32
2 sin .
15. ′′ − ′ + =y y y4 7 0 , y 0 0( ) = , ′( ) = −y 0 1
From Problem 6,
y t e c t c tt( ) = +21 23 3cos sind h d hn s.
Plugging this into the initial conditions yields y 0 0( ) = , ′( ) = −y 0 1, resulting in
c1 0= , c213
3= − .
Hence, the solution of the initial-value problem is
y t e tt( ) = −13
3 32 sind h .
16. ′′ + ′ + =y y y2 5 0 , y 0 1( ) = , ′( ) = −y 0 1
The characteristic equation is r r2 2 5 0+ + = , which has roots − ±1 2i . Hence, the general solu-tion is
y t e c t c tt( ) = +−1 22 2cos sina f .

SECTION 4.3 Complex Characteristic Roots 293
Plugging this into the initial conditions yields y 0 1( ) = , ′( ) = −y 0 1, resulting in c1 1= , c2 0= .
Hence, the solution of the initial-value problem is
y t e tt( ) = − cos2 .
!!!! Euler’s Formula
17. (a) The Maclaurin series for ex is
e x x xn
xx n= + + + + + +1 12
13
12 3! ! !
" "
(b) e i i in
ii nθ θ θ θ θ= + + ( ) + ( ) + + ( ) +1 12
13
12 3
! ! !" "
(c) Using the given identities for i, we can write
e i i in
i
i i
i nθ θ θ θ θ
θ θ θ θ θ θ θ
= + + ( ) + ( ) + + ( ) +
= − + − +FH IK + − + −FH IK = +
1 12
13
1
1 12
14
13
15
2 3
2 4 3 5
! ! !
! ! ! !cos sin
" "
" "
(d) Done in part (c). (e) Done in part (c).
!!!! Changing the Damping
18. The curves below show the solution of
!! !x bx x+ + = 0, x 0 4( ) = , !x 0 0( ) =
for damping b = 0, 0.5, 1, 2, 4. The larger the damping the faster the curves approach 0. Thecurve that oscillates has no damping b =( )0 .
–4
4
161284t
x t( )
2
–2
b = 4
b = 2b = 1
b = 0.5b = 0
–2
2
x
4
–4
–2–4 2 4
b = 4b = 2
b = 1
b = 0.5
b = 0
x.
In Figure 4.3.6 (b) in the text the larger the damping b the more directly the trajectory “heads”for the origin. The trajectory that forms a circle corresponds to zero damping. Note that everytime a curve in (a) crosses the axis twice the corresponding trajectory in (b) circles the origin.

294 CHAPTER 4 Second-Order Linear Differential Equations
!!!! Changing the Spring
19. (a) The solutions of
!! !x x kx+ + = 0, x 0 4( ) = , !x 0 0( ) =
are shown for k = 14
, 12
, 1, 2, 4. For
larger k we have more oscillations.
–4
4
161284t
x t( )
2
–2 k = 4
k = 1k = 0.5
k = 0.25
k = 2
(b) For larger k, since there are more oscilla-tions, the phase-plane trajectory spiralsfurther around the origin.
–2
2
x
4
–4
–2–4 2
k = 4 k = 1
k = 0.5
k = 0.25k = 2
x.
!!!! Linking Graphs
20.
–5
5
y
3t
–5
5
y'
1t
–5
5
y'
5y
–5
3
2
1
3
1
23
21
t = 0
21.
–5
5
y
3t
–5
5
y'
1t
–5
5
y'
5y
–5
3
2
13
2
1
3
2
1
t = 0

SECTION 4.3 Complex Characteristic Roots 295
!!!! Long-Term Behavior of Solutions
22. r1 0< , r2 0< . When r r1 2≠ , the solution is
y t c e c er t r t( ) = +1 21 2
and goes to 0 as t →∞ . When r r r= = <1 2 0, the solution has the form
y t c e c tert rt( ) = +1 2 .
In this case using l’Hopital’s rule we prove the second term tert goes to zero as t →∞ whenr < 0 .
23. r1 0< , r2 0= . The solution
y t c e cr t( ) = +1 21
approaches the constant c2 as t →∞ because r1 0< .
24. r i= ±α β , y t e c t c tt( ) = +α β β1 2cos sina f . For β ≠ 0 the solution y t( ) oscillates with decreasing
amplitude when α < 0 ; oscillates with increasing amplitude when α > 0 ; oscillates withconstant amplitude when α = 0 .
25. r1 0= , r2 0= . The solution
y t c c t( ) = +1 2
approaches plus ∞ as t →∞ when c2 0> and minus ∞ when c2 0< .
26. r1 0> , r2 0< . The solution
y t c e c er t r t( ) = +1 21 2
approaches plus ∞ as t →∞ when c1 0> and minus ∞ when c1 0< .
27. r i= ±β , y t c t c t( ) = +1 2cos sinβ β is a periodic function of 2πβ
and amplitude c c12
22+
!!!! Linear Independence
28. Suppose
c e t c e tt t1 2 0α αβ βcos sin+ =
on an arbitrary interval. Dividing both sides by e tα then differentiating the new equation anddividing by β, yields
c t c tc t c t
1 2
2 1
00
cos sincos sin .
β ββ β+ =− =
Hence, c c1 20 0= =, and we have proven linear independence of the given functions.

296 CHAPTER 4 Second-Order Linear Differential Equations
!!!! Real Coefficients
29. Solution of the differential equation is
y t k e t i t k e t i te k k t ie k k t
t t
t t
( ) = + + −
= + + −1 2
1 2 1 2
α α
α α
β β β β
β β
cos sin cos sincos sin .
a f a fa f a f
For the solution to be real, there must exist real numbers r and s such that
k k rk k si
1 2
1 2
+ =− =
Solving for k1 and k2 , we get
k r si
k r si
1
2
12
12
12
12
= +
= − .
!!!! Solving d ydt
n
n = 0
30. (a)d ydtd ydt
k
d ydt
k t k
dydt
k t k t k
y k t k t k t k
4
4
3
3 3
2
2 3 2
32
2 1
33
22
1 0
0
1213
12
=
=
= +
= + +
= + + +!
(b) y 4 0( ) = . The characteristic equation is
r4 0= , which has a fourth-order root at0. Hence, the solution is
y t c c t c t c t( ) = + + +0 1 22
33,
which is the same as in part (a).
(c) In general we have
y t kn
t kn
t k t k
c t c t c t c
nn
nn
nn
nn
( ) =−( )
+−( )
+ + +
= + + + +
−−
−−
−−
−−
11
22
1 0
11
22
1 0
11
12! !
"
"
because all of the constants are arbitrary.
!!!! Higher-Order DEs
31. d ydt
d ydt
d ydt
5
5
4
4
3
34 4 0− + =
The characteristic equation is
r r r r r r r r5 4 3 3 2 3 24 4 4 4 2 0− + = − + = −( ) =b g ,

SECTION 4.3 Complex Characteristic Roots 297
which has roots, 0, 0, 0, 2, 2. Hence,
y t c c t c t c e c tet t( ) = + + + +1 2 32
42
52 .
32. d ydt
d ydt
dydt
y3
3
2
24 7 10 0+ − − =
The characteristic equation is
r r r3 24 7 10 0+ − − = ,
which has roots, –1, 2, –5. Hence,
y t c e c e c et t t( ) = + +− −1 2
23
5 .
33. d ydt
dydt
5
5 0− =
The characteristic equation is
r r r r r r r r r r r5 4 2 2 21 1 1 1 1 1 0− = − = − + = −( ) +( ) + =b g b gb g b g ,
which has roots, 0, ±1, ±i. Hence
y t c c e c e c t c tt t( ) = + + + +−1 2 3 4 5cos sin .
!!!! Oscillating Euler-Cauchy
34. We used the substitution y tr= and obtained for r i1 = +α β and r i2 = −α β the solution
y t k t k t k e k e k e k ee c t c t t c t c t
i i i t i t t i t t i t
t
( ) = + = + = +
= ( ) + ( ) = ( ) + ( )
+ − +( ) −( ) + −1 2 1 2 1 2
1 2 1 2
α β α β α β α β α β α β
α αβ β β β
ln ln ln ln ln ln
ln cos ln sin ln cos ln sin ln .a f a fThis is the same process as that used at the start of Case 3 in the text utilizing the Euler’s For-mula (4).
35. t y ty y2 2 0′′ + ′ + = , r r r−( ) + + =1 2 1 0, r r2 1 0+ + = , r i= − ±12
32
,
y t t c t c t( ) =FHGIKJ +
FHGIKJ
LNM
OQP
−1 21 2
32
32
cos ln sin ln
36. t y ty y2 3 5 0′′ + ′ + =
Letting y tr= yields
′ =
′′ = −( )
−
−
y rty r r t
r
r
1
21 .

298 CHAPTER 4 Second-Order Linear Differential Equations
Plugging this into the differential equation yields
t r r t trt tt r r r
r r r
r
2 2 11 3 5 01 3 5 0
−( ) + + =
−( ) + +{ } =
− −
,
and gives r r2 2 5 0+ + = , which has roots − ±1 2i . Hence, the solution is
y t t c t c t( ) = ( ) + ( )−11 22 2cos ln sin lna f .
!!!! Inverted Pendulum
37. The differential equation !!x x− = 0 has the characteristic equation r2 1 0− = with roots ±1.Hence, the general solution is
x t c e c et t( ) = + −1 2 .
(a) With initial conditions x 0 0( ) = , !x 0 1( ) = , we find c112
= and c212
= − . Hence, the solu-
tion of the IVP is
x t e e tt t( ) = − =−12
12
sinh .
(b) As t →∞ , x t( )→ 0 if c1 0= , and then !x t( )→ 0 also. This will happen whenever
x x0 0( ) = − ( )! .
!!!! Pendulum and Inverted Pendulum
38. (a) The inverted pendulum equation has characteristic equation r2 1 0− = , which has roots±1. Hence, the solution
x t c e c e c t t c t t C t C tt t( ) = + = +( ) + −( ) = +−1 2 1 2 1 2cosh sinh cosh sinh sinh cosh ,
where C c c1 1 2= − , C c c2 1 2= + .
(b) The characteristic equation of the pendulum equation is r2 1 0+ = , which has roots ±i .Hence, the solution
x t c t c t( ) = +1 2cos sin .
(c) The reader may think something strange about this because one form (a) appears real and(b) complex, but they are really the same; the difference is taken up by how one choosesthe coefficients c c1 2, in each case. The span of e eit it, −l q is the same as the span of
sin , cost t { } .

SECTION 4.3 Complex Characteristic Roots 299
!!!! Finding the Damped Oscillation
39. The initial conditions
x 0 1( ) = , !x 0 1( ) =
give the constants c1 1= , c2 2= . Hence, we have
x t e t tt( ) = +( )− cos sin2 .
5
–0.5
1.5x
t
1
0.5
31
x t e t tt( ) = +( )− cos sin2
!!!! Extremes of Damped Oscillations
40. The local maxima and minima of the curve
x t e c t c tt( ) = +α ω ω1 2cos sina fhave nothing to do with the exponential factor e t−α ; they depend only on
c t c t1 2cos sinω ω+ ,
which can be rewritten as A tcos ω δ−a f having periodic function T =2πω
. Hence, consecutive
maxima and minima occur at equidistant values of t, the distance between them being one-half
the period, or πω
. (You can note in Problem 24 that the time between the first local maxima and
the first local minima is π π1= .)
!!!! Underdamped Mass-Spring System
41. We are given parameters and initial conditions
m = 0 25. , b = 1, k = 4 , x 0 1( ) = , !x 0 0( ) = .
Hence, the IVP is
0 25 4 0. !! !x x x+ + = , x 0 1( ) = , !x 0 0( ) = ,
which has the solution
x t e t ttb g = +FHG
IKJ
−2 2 3 33
2 3cos sin .

300 CHAPTER 4 Second-Order Linear Differential Equations
!!!! Damped Mass-Spring System
42. The IVP is
!! !x bx x+ + =64 0, x 0 1( ) = , !x 0 0( ) = .
(a) b = 10: (underdamped), x t e t tt( ) = +FH IK−5 39 539
39cos sin
(b) b = 16: (critically damped), x t t e t( ) = +( ) −1 8 8
(c) b = 20: (overdamped), x t e et t( ) = −− −13
4 4 16b g
!!!! LRC-Circuit I
43. (a) The IVP is LQ RQC
Q Q Q Q!! ! !! !+ + = + + =1 8 25 0 , Q 0 1( ) = , ′( ) =Q 0 0
(b) Q t e t tt( ) = +FH
IK−4 3 4
33cos sin . Q t e tt( ) = −( )−5
334 cos δ where δ = −tan 1 4
3
(c) I t Q t e t e tt t( ) = ′( ) = − −( ) − −( )− −5 3 203
34 4sin cosδ δ where δ = −tan 1 43
(d) Charge on the capacitor and current in the circuit approach zero as t → +∞ .
!!!! LRC-Circuit II
44. (a) The IVP is LQ RQC
Q Q Q Q!! ! !! !+ + = + + =1 1
41 4 0 , Q 0 1( ) = , ′( ) =Q 0 0
(b) Q t e t t e tt t( ) = +FHG
IKJ = −− −2 22 3 3
32 3 2 3
32 3cos sin cos δd h , tanδ = 3
3
(c) I t Q t e t e tt t( ) = ( ) = − − − −− −! cos sin4 33
2 3 4 2 32 2δ δd h d h
(d) As t →∞ , Q t( )→ 0 and I t( )→ 0
!!!! Computer Lab: Damped Free Vibrations
45. IDE Lab
!!!! Reading Nonautonomous Differential Equations
46. (a) !!xt
x+ =1 0 . This ODE describes (among other things) an undamped vibrating spring in
which the restoring force is initially very large (when t is near zero), but eventuallydecays to zero. One would expect that the solution amplitude would increase as the

SECTION 4.3 Complex Characteristic Roots 301
restoring force decays to zero. It would be interesting to investigate the solutions oft hisequation using an open-ended graphic solver.
(b) Solution was plotted with IC x 01 2.( ) = , ! .x 01 0( ) = in the xt as well as the !xx planes.
200100
5
10
x
t300
15
–15
–10
–5400 500
10 20–10
–2
–20
–4
1
3
x–1
–3
2
!x
(c) As we expected the oscillations amplitude increases with t.
47. (a) !! !xt
x x+ + =1 0 . This ODE describes a damped vibrating spring in which the damping
starts very large when t is near zero, but decays to zero. We suspect that initially theamplitude of a solution will rapidly decay, but as time increases the motion will becomealmost periodic oscillations, as there will be almost no friction.
(b) Solution was plotted for IC x 01 2.( ) = , ! .x 01 0( ) = in the xt as well as the !xx planes.
2010
0.5
x
t30
1
–0.5
40 50
1 2–1
–1
0.5
–2
x–0.5
–1.5
1
!x
(c) As first expected, initially the solution is rapidly decaying; however, our second expecta-tion is not confirmed! As time increases the oscillations do not become harmonic—theamplitude of the oscillations decrease gradually.
48. tx x!!+ = 0. If you divide by t, you will see that this equation is the same as the equation inProblem 46.

302 CHAPTER 4 Second-Order Linear Differential Equations
49. (a) !! !x x x x+ − + =2 1 0b g . Negative friction for 0 1< <x , positive damping for x ≥1. For a
small initial condition near x = 0, we might expect the solution to grow and thenoscillate around x = 1. This would be a good DE to investigate with an open-endedgraphical DE solver.
(b) Solution was plotted with different IC:
x 0 05( )( ) = . ,x 0 2( ) = ,
and
x 0 4( ) = ; !x 0 0( ) = ).
(c) As expected, the solution grows for smallinitial conditions, whereas for x >1 we
see damping.
105
23
x
t15
4
–2–1
1
20
50. (a) !! sin !x t x x+ ( ) + = 0. Damping changes periodically from negative to positive. It would be
fascinating to investigate the solutions of this equation using an open-ended graphicssolver. (See figure.)
(b) Solution was plotted with IC x x0 2, 0 0( ) = ( ) =! in the xt as well as in the !xx planes.
4020
1
2
x
t60
–2
–1
80 100 1 2–1
–1
–2
–2
x
1
2!x
(c) The solution is a superposition of two periodic oscillations.
51. (a) !! !xt
x tx+ + =1 0 . Damping is initially large, but it vanishes as time increases; the restoring
force, on the other hand, is initially small, but increases with time. The question is:which effect will dominate in hte long run? It is rather difficult to predict; you mightexplore the problem with an open-ended graphic ODE solver.

SECTION 4.3 Complex Characteristic Roots 303
(b) Solution was plotted with IC x x01 2, 01 0. ! .( ) = ( ) = in the xt as well as in the !xx planes.
105
1
1.5
x
t15–0.5
0.5
20 25 30
2
–1
1 2–1
–1
–2
x
1
2!x
(c) Note that initially there is large damping, so the amplitude of the solution is decreasing.As time progresses, however, the damping keeps on decreasinga nd the spring constantkeeps on increasing. As a result, the spring vibration frequency keeps on growing and thespring vibration amplitude keeps on declining.
52. (a) !! sinx t x+ ( ) =2 0. Restoring force changes periodically from positive to negative with a
frequency different from the natural frequency of the spring. The behavior seems to beperiodic but rather complicated as the phase plane trajectory shows (see figure).
(b) Solution was plotted with IC x 0 2( ) = , !x 0 0( ) = in the xt as well as in the !xx planes.
4020
2
4
x
t60
–4
–2
80 100 2 4–2
–1
–4
–2
x
2
4
–6 6
!x
(c) The solution is, indeed, periodic.
!!!! Suggested Journal Entry
53. Student Project