Embed Size (px)
Citation preview
99
CHAPTER 4
LOCATION OF FAULTS IN TRANSFORMERS
DURING IMPULSE TESTING
4.1 INTRODUCTION
A new technique for the location of faults in power transformers is
described in this chapter, based on the spectral analysis of signals recorded during
the lightning impulse test on transformers.
Location of faults in windings is still a difficult task and requires the
untanking of the test object in repair shops. The methods adopted to locate the site of
the fault and to determine the extent of winding failure during the dielectric test are
discussed in the ensuing sections based on an experimental analysis, and an analyical
simulation of a transformer winding. It is based on the demarcation of certain
specified parameters on the signal spectrum for the measurement and identification
of winding failure. The temporal records of applied voltage, neutral current, the
capacitive transferred current surge, the transferred surge voltage function and their
corresponding frequency spectra are used for this.
4.2 STATEMENT OF THE PROBLEM
It would be appropriate, as a first step, to analyse the behaviour of a
uniform single layer winding when energised by an impulse voltage. This is not
severely restrictive, as single layer windings have served to elucidate many features
of the frequency response of windings as reported by Degeneff R.C (1977,1982),
100
Dick E.P and Erven C.C (1978). Further, with adequate mathematical underpinning,
results from such a winding can form the basis for a more generalised treatment for
power transformer applications.
The aims of this chapter are as follows:
1) To propose methods for location of winding fault during impulse
tests.
2) To assess the magnitude of failure of winding.
3) To confirm the utility of the methods with experimental results.
In all cases, the term fault, here refers to a breakdown across a section of
the winding during the impulse test. The following sections discuss the case of a
breakdown of non-restoring insulation. This is not a trivial issue as several
investigations use differing principles for analysing faults during impulse tests. For
example, Malewski R and Poulin B (1985) state that the appearance of fault on the
neutral current is similar to that observed when a portion of the winding is physically
short by a piece of wire.
Malewski R. and Poulin B (1988) used a diac across sections for
elucidating certain features with the transfer function method for discharge analysis.
This chapter progresses with the above conceptual approach to simulate fault
phenomenon in windings.
4.3 SIMULATION OF FAULT
Analysis is done on records obtained from experimental and analytical
simulation during impulse testing. An exercise is done for this by deliberately
connecting a fault simulating model across the section to be faulted which creates a
destructive fault within windings. The applied voltage, and the winding current
101
response prior to and after placing the short are recorded and their difference is
evaluated for failure analysis as explained in chapter 2.
4.3.1 EXPERIMENTAL ANALYSIS
The experimental verification is done on a specially constructed layer
winding transformer model having the high voltage coil built with 20 tapping
arrangement over the length and housed with a grounded metal core and shield as
described in Appendix 1. It differs from the Abetti coil in this respect that it has a
secondary winding, which could be used for additional measurement and also has a
low value ground capacitance Cg due to the presence of additional metallic former in
the inner and outer diameter.
The fault model for the experimental analysis of inter-section fault uses a
neon bulb to directly short between sections of the layer winding.
The impulse test is done using a Marx generator PU12 Haefley model for
conducting an impulse or the chopped impulse test. The arrangement uses a voltage
divider, current shunt, measuring cables, the 10-bit digital storage oscilloscope and
the 12-bit HP-VXI based virtual instrument configured for the impulse testing as
described in Appendix 3. The voltage signals and current signals are recorded while
applying full or reduced level lightning impulse signal and tail chopped impulse
signals as specified in IEC 76 (1980) standards.
The experimental simulation is done by connecting the fault model
deliberately between 5% or 10% tapping of the high voltage winding as shown in
Fig. 4.1.
The actual observation of current records measured using current shunt,
shielded cables are as shown in Fig. 4.2.

102
-Q: CRO
Tnmfemd sazge voltage
Figure 4.1 Lightning impulse test terminal connections and methods of failure detection
43.2 DETAILS OF ANALYTICAL SIMULATION
A single layer winding often adopted in literature as a 10-section Abetti
coil and reported by Abetti P.A and Maginniss (1954), DegenefF R.C (1977),and
Jayashankar V (1994) is used as the circuit model for analytical simulation, the
details of which are given in Appendix 2. The RLC lumped parameter model has the
first few resonant frequencies as 7.39K, 16.5K, 28K, 41K.etc.

103
The relative shifts in these frequencies are used for analysis. Analytical
simulation of fault across sections of the coil is done using a time-operated switch.
The fault is created with a switch Si being connected across the section that is to be
faulted. The switch remains open for a time upto tj after the energisation of the coil
by the Marx generator. At tj the switch closes and continues to stay in the closed
position until the end of the simulation. This approach is adopted because in actual
situations, the breakdown will always occur after a finite instance if the coil has
originally not been subjected to catastrophic dielectric failure. This justifies the use
of ft.
The necessity of keeping the switch closed until breakdown is obvious
since this work mainly caters to the breakdown of non- restoring insulation.
The study uses PSPICE (Programmable Simulation Package for in Circuit
Emulation, Version 7.0) for analytical simulation.
During simulation the input voltage is obtained from a Marx generator
circuit model as a constant source. Hence, further analysis of the minor faults is done
on the current spectrum only. This is equivalent to using the transfer function (TF)
analysis.
In all impulse measurements the difference between currents at reduced
and full voltages are of primary importance. The sequence of simulations is as
follows:
1. The simulation is done for a standard lightning impulse (LI) signal initially
with no fault across the winding. The records of the applied voltage V and
winding current i are stored in files.
2. A fault is created with an initial value of tj (of 20 ps) on a portion of the
winding between 90 - 100% of its length. The records of voltage V and
winding current i are stored.
104
3. The simulation is repeated at various locations of the winding length as
top, middle, and bottom sections. Sectional short-circuit is created for 5%,
10%, 15% etc, of the percentile length of coil to simulate sectional
winding fault. The short-circuiting is done between 20%-30%, 60%-70%,
70-80%... 80-90% etc..tapping, and their files are stored.
4. The analytical simulations are also repeated for other values of h such as 5
jis, 40ps to simulate effects of breakdown at different instances of time.
This approach is justified here since it is based on the fact that transformer
windings with different insulation types have different breakdown
strength. The existence of f will accentuate the difference, if any.
The simulations are also done with impulse chopped on the tail at 2ps, 6ps
as a part of type test as specified by IEC 76 (1980) for insulation integrity tests.
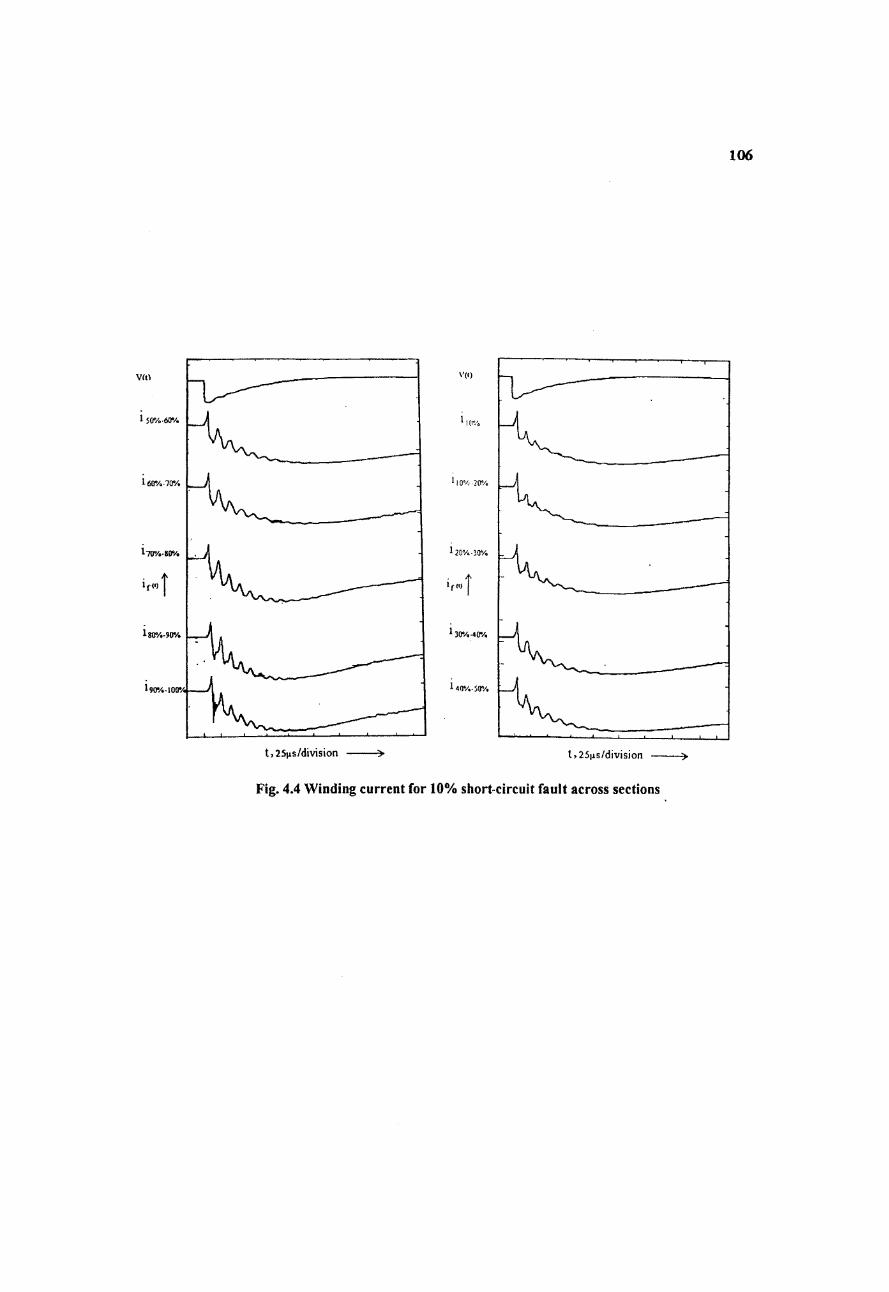
Fig. 4.3 is a typical waveform showing the difference in neutral current
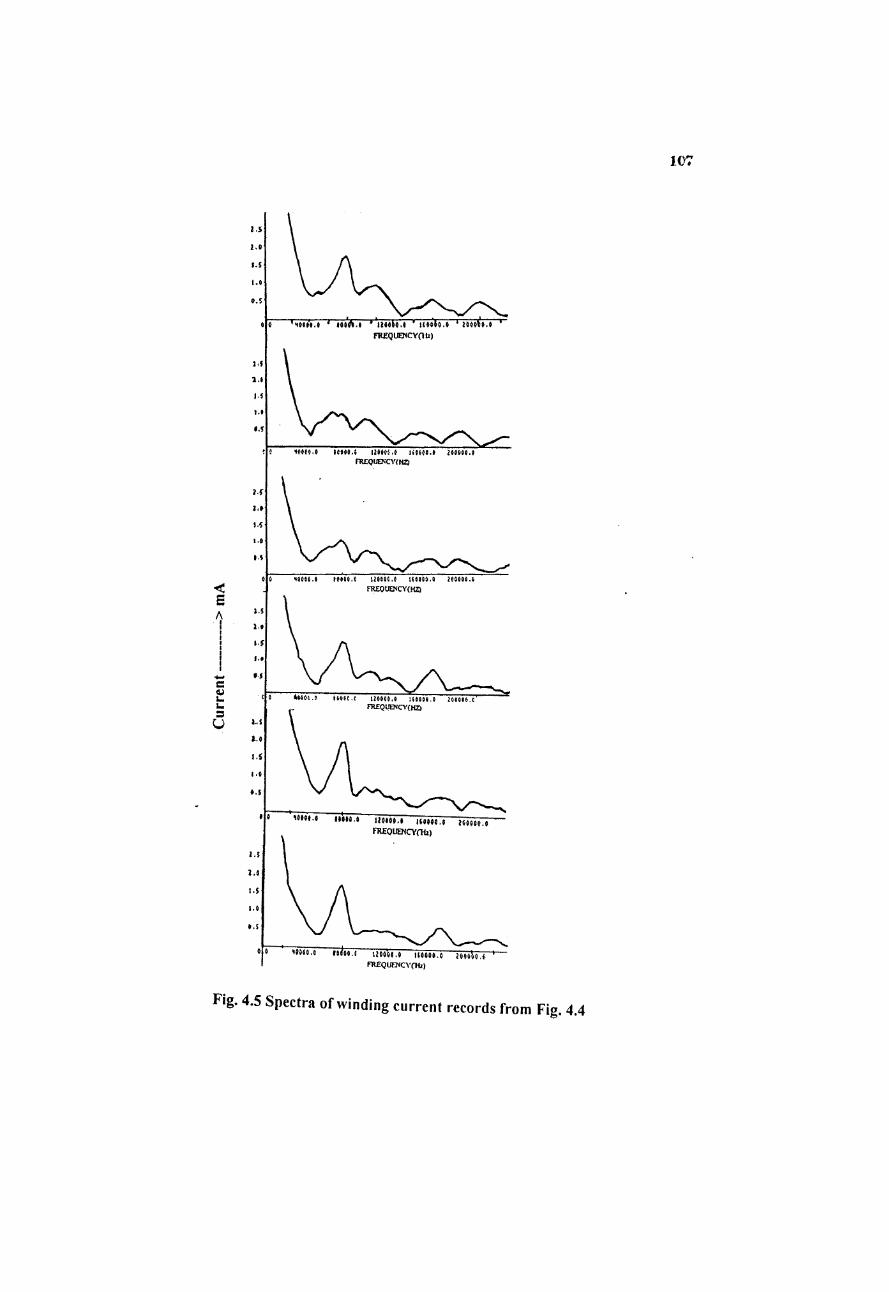
before and after the occurrence of a 10% sectional short circuit fault. Fig. 4.4 shows
the experimental measurement of the current signal for locating the site of the
winding fault by shifting the disruptive fault simulating model at various sections as
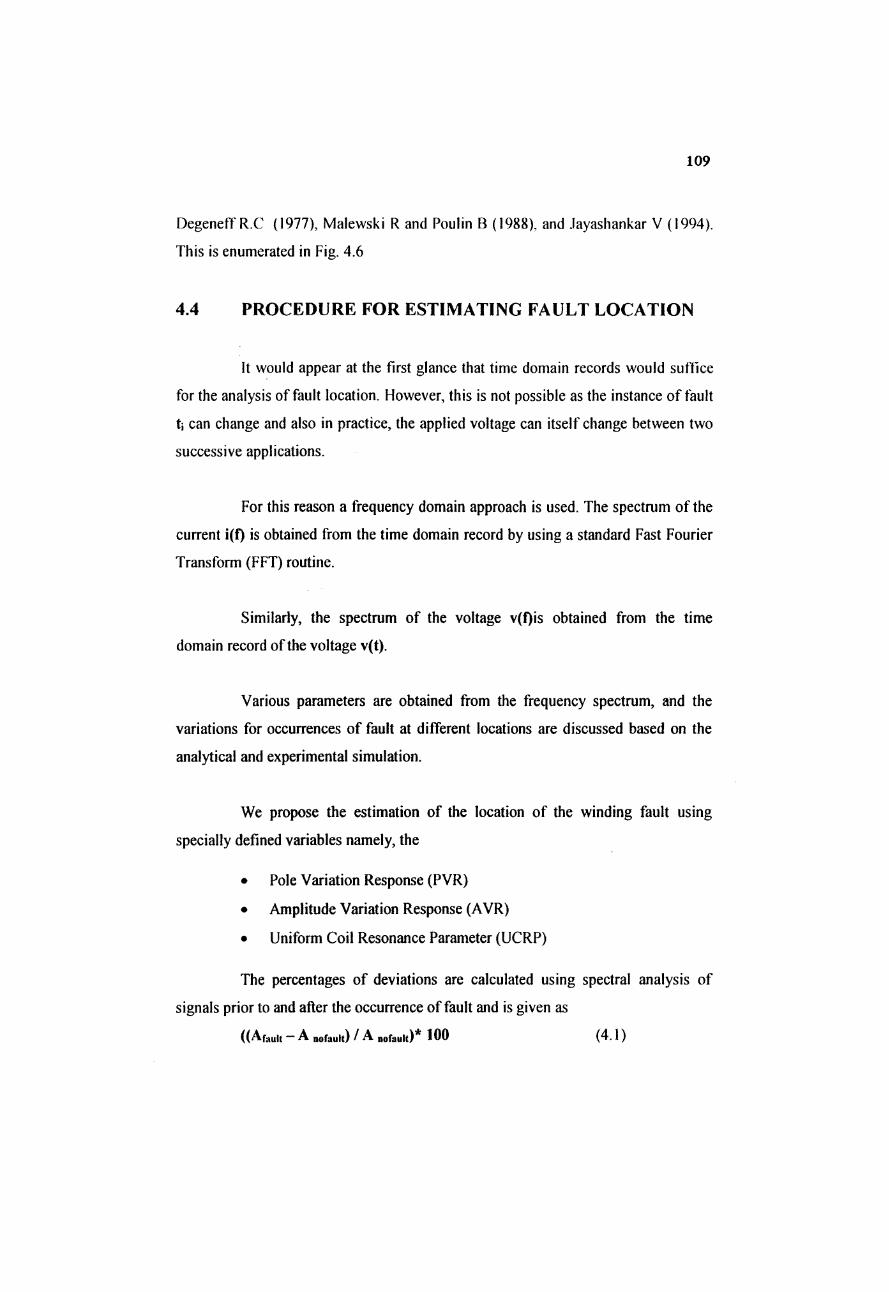
10%-20%...50%-60%...90%-100%. The corresponding spectrum of the signals is
calculated using the Fast Fourier Transform (FFT) algorithm as shown in Fig. 4.5.
for faults from 0-10% to 50-60%. The spectral response is similar for the
experimental and simulation model except that the resonant frequency values are
different since these are system dependent. Coils of varying dimension have their
impedance parameter differing, because of which the natural resonant inherent
frequencies are also different. For the experimental coil used, a span of 0 to 560 kHz
has been used to analyse faults as low as 5%. The first three resonant frequencies of
this coil are 85kHz, 156 kHz, 243kHz.
The spectrum showed a relative shift in resonant frequency poles when a
fault occurred compared to the spectrum of the non-faulty winding as explained by
Vol
tage
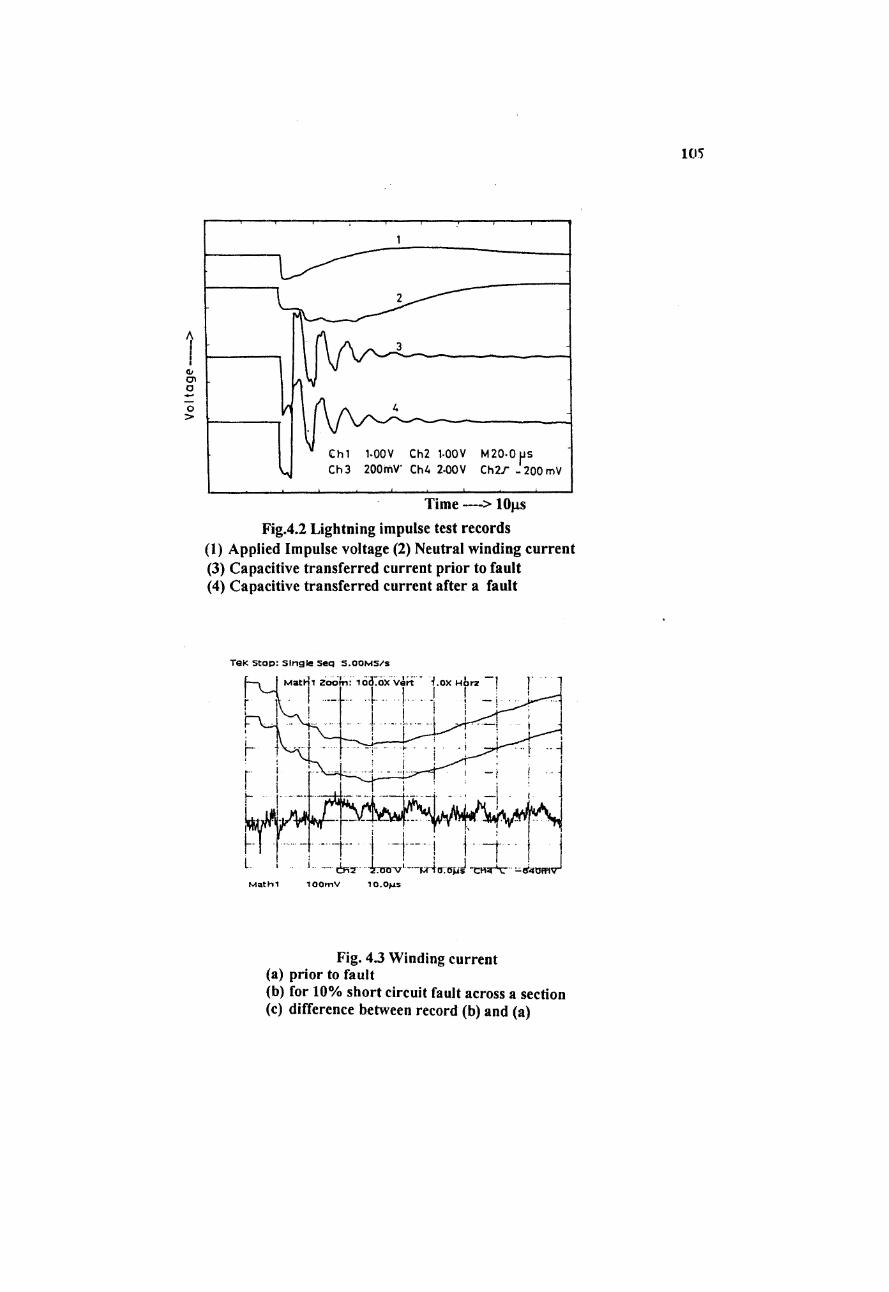
Time —> 10nsFig.4.2 Lightning impulse test records
(1) Applied Impulse voltage (2) Neutral winding current(3) Capacitive transferred current prior to fault(4) Capacitive transferred current after a fault
TeK stop: single Seq S.ooms/s
Mathl Zoom: 1657oX Vert ~ i.OX Horz
Mathl
,-j•” is ar ■Jrutrv'—m4ovoms ‘cwrHr -tteoHW1lOOmV 10.0ms
Fig. 4.3 Winding current(a) prior to fault(b) for 10% short circuit fault across a section(c) difference between record (b) and (a)
106
t,2S|js/division ------- >
Fig. 4.4 Winding current for 10% short-circuit fault across sections
107
Fig. 4.5 Spectra of winding current records from Fig. 4.4

108
Fig. 4.6 Spectra of neutral winding current (A) prior to (B) after short circuit fault
109
Degeneff R.C (1977), Malewski R and Poulin B (1988), and Jayashankar V (1994).
This is enumerated in Fig. 4.6
4.4 PROCEDURE FOR ESTIMATING FAULT LOCATION
It would appear at the first glance that time domain records would suffice
for the analysis of fault location. However, this is not possible as the instance of fault
ti can change and also in practice, the applied voltage can itself change between two
successive applications.
For this reason a frequency domain approach is used. The spectrum of the
current i(f) is obtained from the time domain record by using a standard Fast Fourier
Transform (FFT) routine.
Similarly, the spectrum of the voltage v(f)is obtained from the time
domain record of the voltage v(t).
Various parameters are obtained from the frequency spectrum, and the
variations for occurrences of fault at different locations are discussed based on the
analytical and experimental simulation.
We propose the estimation of the location of the winding fault using
specially defined variables namely, the
• Pole Variation Response (PVR)
• Amplitude Variation Response (AVR)
• Uniform Coil Resonance Parameter (UCRP)
The percentages of deviations are calculated using spectral analysis of
signals prior to and after the occurrence of fault and is given as
((Afauit — A nofault) / A nofault)* 100 (4.1)
110
where A is any of the mentioned variables. An exercise is done in the spectrum
between unfaulted and faulted conditions of the winding model using the records of
neutral winding current and transferred surge current.
The computation of the three parameters is as follows:
(1) Pole Variation Response (PVR)
An arbitrary fault is created across the section of winding as 5%, 10%
tapping to confirm the above method.
The frequency spectrum of the uniform coil is obtained. Prior to a fault the
first few resonant frequencies are f„. After a fault the resonant frequency pole peaks
are shifted. These are measured as f The percentage variation in the pole peaks are
determined as
PVR = I f'n-fn/fj *100 (4.2)
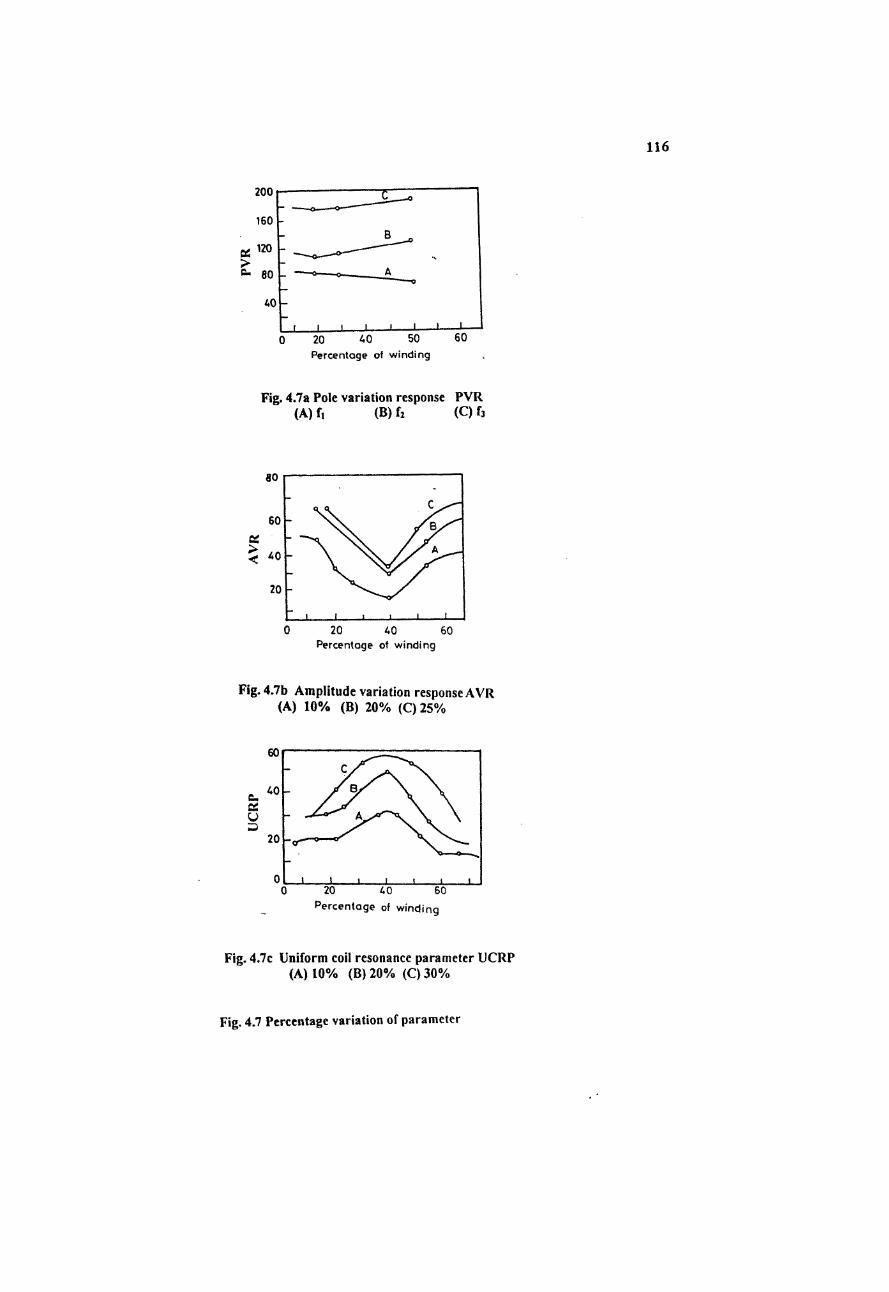
The pole variation response evaluated with the first three resonant
frequencies of the experimental coil, during simulation of a 10% short-circuit
fault at various sections along the length of the coil is shown in Fig.4.7a.
(2) Amplitude Variation Response (AVR)
Similarly the amplitude of each of the resonant frequency pole peaks is
determined as A„ prior to and A',, after simulating the section-section fault. The
percentage variation in amplitude is evaluated as
AVR= I A -A„/A„ | *100 (4.3)
Ill
Fig.4.7b shows the AVR evaluated for a 10%, 20%, and 25% short-
circuit fault at different locations between the line end and ground end of the
experimental coil.
(3) Uniform coil resonant parameter (UCRP).
The basic frequency response (in terms of admittance) of a layer winding
shows certain resonant peaks. The behavior at these peaks can be approximated to a
series resonant behavior as shown by Glaninger P (1986). Under such circumstances
the response close to the resonant peak can be approximated as series RLC circuit.
Such circuit possesses a bandwidth that is computed from the 3 dB points about the
resonant frequency. This concept is invoked to define the parameter called uniform
coil resonance (UCRP). This is computed as the area enclosed up to the 3 dB points
for each of the resonant frequency as
UCRP = I AR -ARn / ARn I * 100 (4.4)
Here AR' „ and AR„ are the area within each of the pole peaks in the
faulted and non-faulted winding spectra respectively.
Fig.4.7c shows the UCRP evaluated for the experimental coil for a 10%, 20%,
30% short-circuit fault at different locations between the line end and ground
end of the experimental coil.
At least the first three resonant frequencies are vital as reported by
Udayakumar K and Vanaja R (2000).
It has been found that if a fault occurs in the line end of the winding, the
variation in the parameters AVR and UCRP is very high than if it is in the ground
section. If fault is in the middle section, the variation of UCRP is very high and that
of AVR is very low as shown in Fig. 4.7. The x-axis shows the n lh position of the
112
tapping of the winding from line end to ground end where n=0-10%, 10%-20%...
and the y-axis shows the respective variables evaluated using Equation (4.1).
As referred in Pritindra and Chowdhuri (1996), the transformer coil,
subject to lightning impulse, responds like a system of capacitance and inductance.
Corrective prevails in the beginning of the process with the voltage across line terminals
given as
where
where
where Bj, B2 are boundary conditions with the origin (x=0), the line end V(0) = 1 per
unit and the ground end V( £) ~ 0 .
Bi = - exp (-a)/2 sin ha and
B2 = exp (a)/2 Sin ha (4.8)
And thus V(x) = Sin h[a(l-x/^)]/(Sin ha) (4.9)
It is seen that the percentage variation AVR and UCRP are complements
of each other for occurrence of failure in various locations between the line end and
the ground end as presented in Table 4.1. The table presents the results for a 10%
short-circuit fault. Similar charecteristics are observed for higher percentage faults
also. Faults near the line end occur with resonant poles having higher UCRP in
V, = 2Vr [l-e'Vzrcfr] (4.5)
Z = Surge impedance of winding
CefT = Surge capacitance of coil
Vf = Amplitude of signal
V, = Voltage transmitted to the transformer
The voltage distribution in winding is presented as
V(x) - B,e(YX) + B2e('TX) (4.6)
1 C9
Y = —I—- ornc.
a (4.7)
113
contrast to faults near the ground end. This is due to the fact that the line end is
stressed more. This is because if the oncoming voltage wave is with higher
frequencies, then the critical frequency of the winding will pile up at the entrance of
the winding, producing a stress concentration there, due to which the current signals
have higher energy density spectrum. Hence line end faults report higher percentage
deviation of amplitude and pole peak variations than the ground end faults of similar
magnitude. This can be explained as due to the travelling wave causing a transition
from the capacitive voltage distribution into the inductive voltage distribution
through damped oscillations of the signal. Near the ground end, the signal hence has
oscillatory current that is exponentially decaying. The decaying factor is
deterministic of the coil dimensions and the reactive impedance of the windings.
Failure analyses of the winding subjected to lightning impulse 1.2 /50 jjls
and lightning impulse chopped at tail near 2 ps or 6 ps are studied using Equation
(4.1) to Equation (4.4) on the Abetti coil designed for a = 4.0 to a = 14 where a =
Vcg/cs. Here cg represents ground capacitance and cs represents series capacitance.
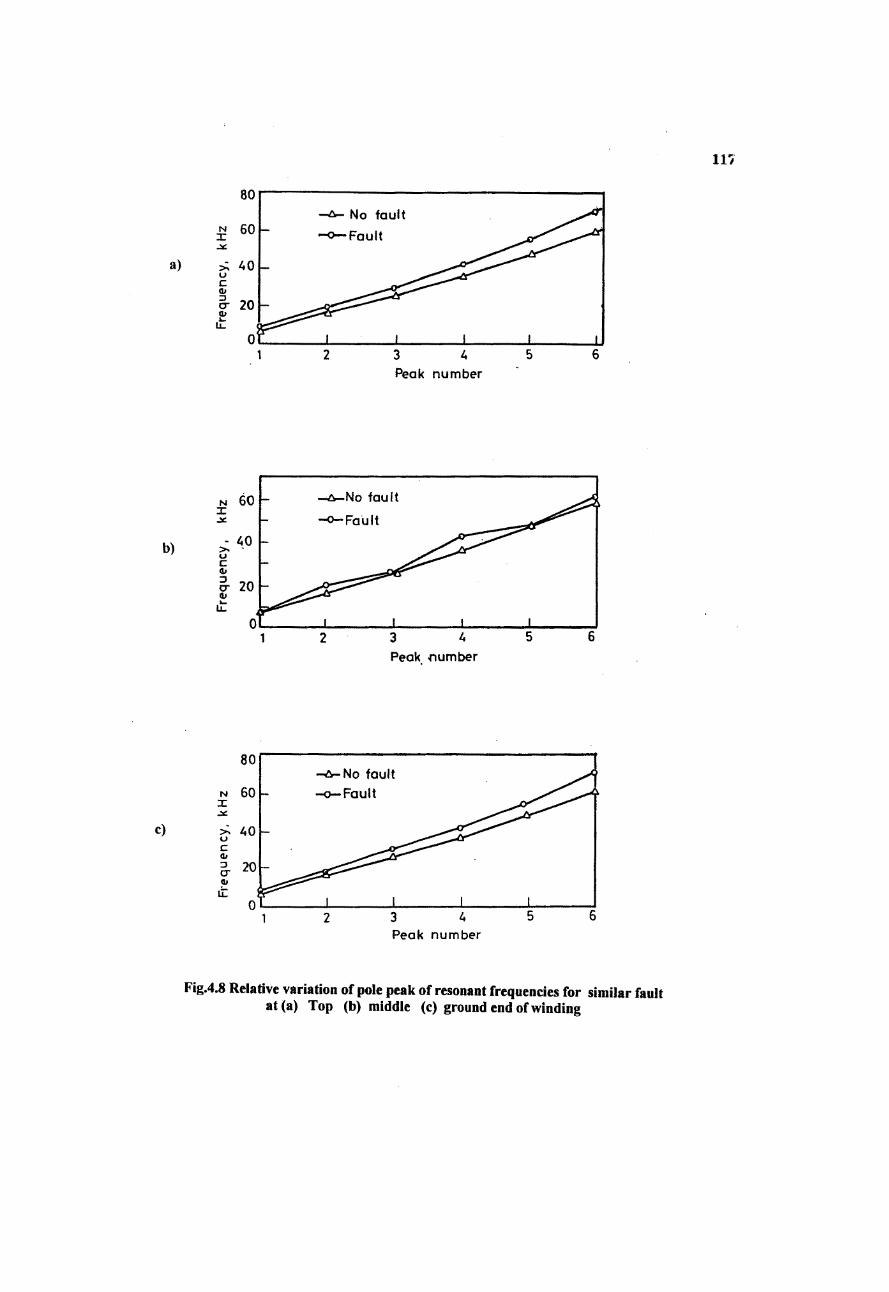
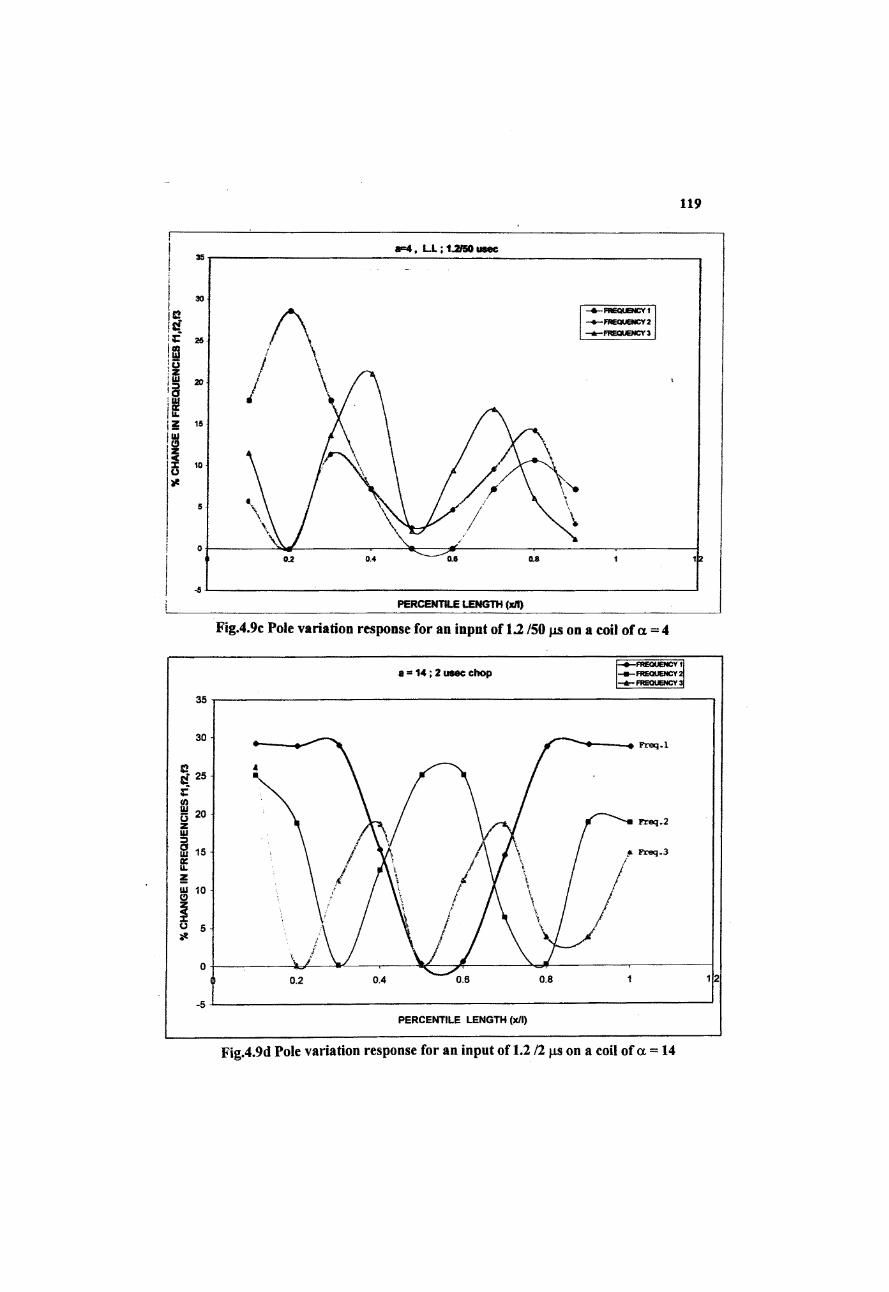
The spatial distribution of the corresponding pole shifted resonant
frequencies, namely the PVR near the line end, midwinding and ground end of the
coil with grounded neutral is estimated along the length of the winding (xH). This is
shown in Fig. 4.8 and Fig. 4.9, for the first three resonant frequencies for a 10%
fault. The Fig.4.8 shows the relative shift of resonant frequency poles between the
nonfaulted and faulted windings for a similar fault occurring at the line end, mid
winding and ground end of the coil as explained in Equation (4.1). In the figures
peak number represent the corresponding first few resonant frequency poles.
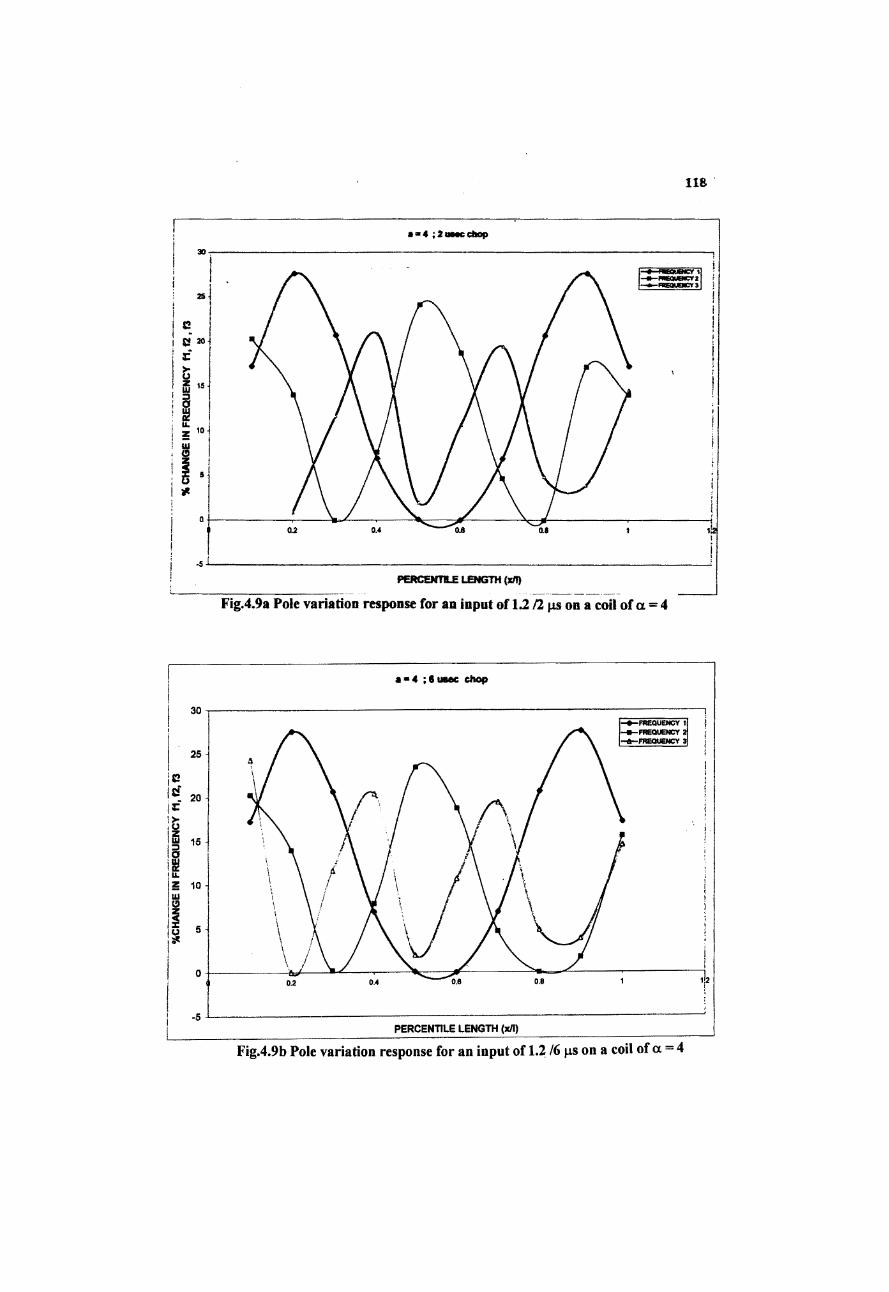
Each resonant frequency oscillates in time around specific frequencies of
the coil and these space harmonics are called the natural frequencies of the coil that
are specific to coil dimensions. The space harmonics along the winding with
grounded neutral present a pattern of maximum and minimum shift in the resonant

114
frequency poles by evaluation using Equation (4.1) and are shown in the y-axis. The
Fig.4.9 represents clearly the relative shift for the first three space harmonics or
resonant frequency poles, with (n=3) with different a for different impulse inputs.
The first resonant frequency has a minimum deviation of the pole peak in
the mid-section of the winding than at the line end or ground end. The second
resonant frequency shows a minimum shift at the 1/4, 3/4 points and a maximum at
the V2 point of the winding, and so on for higher resonant harmonics.
From the analysis it is observed that, a fault near the line end shows a
higher variation in the fundamental frequency compared to a fault near the
midwinding and ground end. On the other hand, a fault near the midwinding shows
second resonant frequency to have a predominantly higher shift in comparison to the
odd harmonics. Similar patterns are observed for higher space harmonics also.
Table 4.1 Percentile variation in AYR and UCRP for fault
xi i Variation in % AVR Variation in % UCRP
Top 10% tapping 40-55 17-21
Middle 10% tapping 14-15 31
Bottom 10% tapping 35-45 13-14
4.5 ANALYSIS OF SIMULATION RESULTS FOR
ESTABLISHING MAGNITUDE OF FAULTS
At the first instance it might appear that an exercise similar to that carried
out on the value of the resonant frequencies, might serve to elucidate the magnitude
of faults. In practice this does not occur. More important is that, a different method is
needed for analysing the percentage of faults. This is because while the value of
115
resonant frequencies is relevant for the case of a transformer with significant
capacitances to ground, a degenerate case of pure inductances will not show resonant
frequencies. However, the magnitude of failure is one that can be addressed even for
the degenerate case. To explain this, a fault is simulated on a section of the
inductance by a switch S that is closed after a finite time as explained in the previous
section.
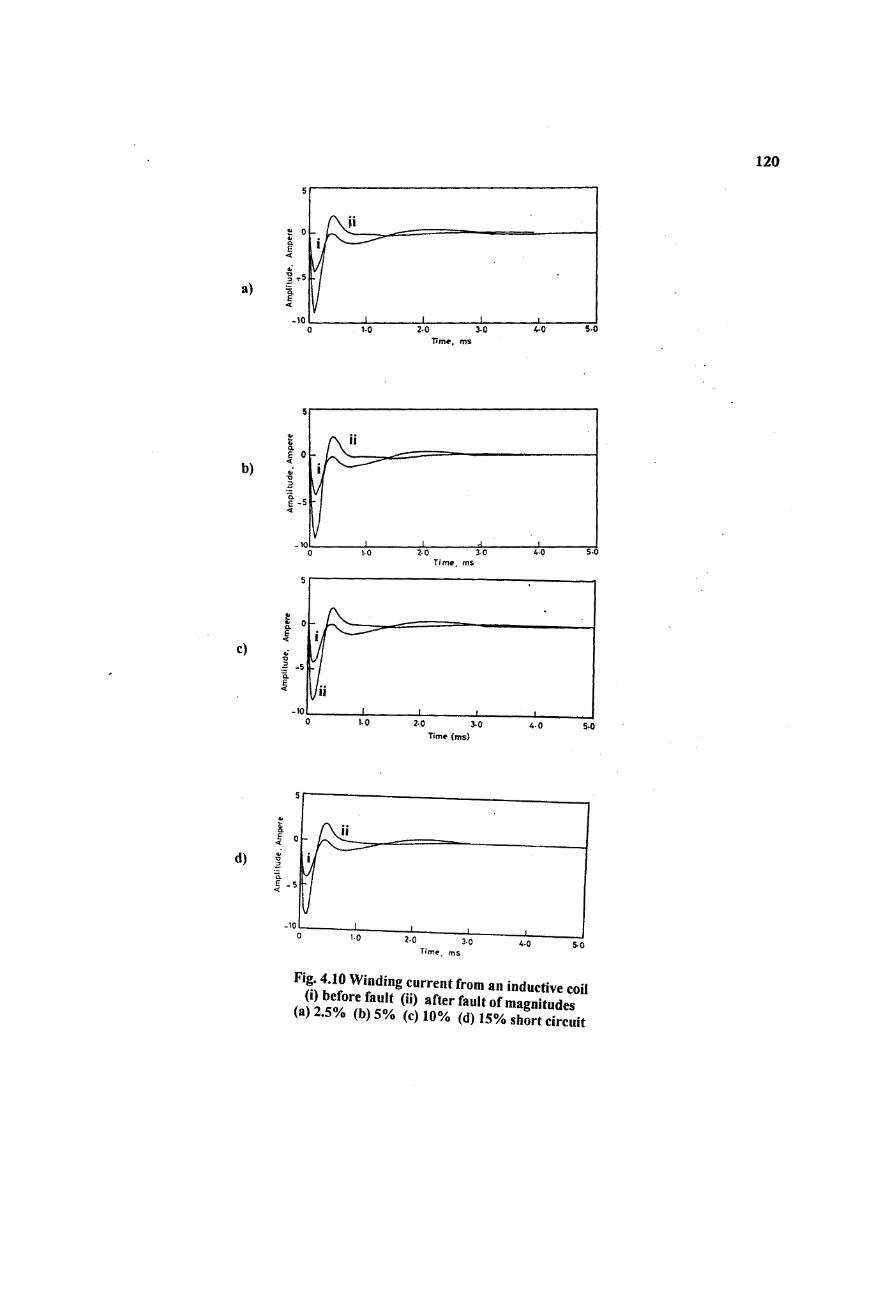
Fig.4.10 shows the neutral current response of a coil modeled as a R-L
circuit and energised with lightning impulse (LI). The current signals before and after
a breakdown fault are as seen in figure for 2.5%, 5%, 10%, 15% magnitudes of
winding breakdown.
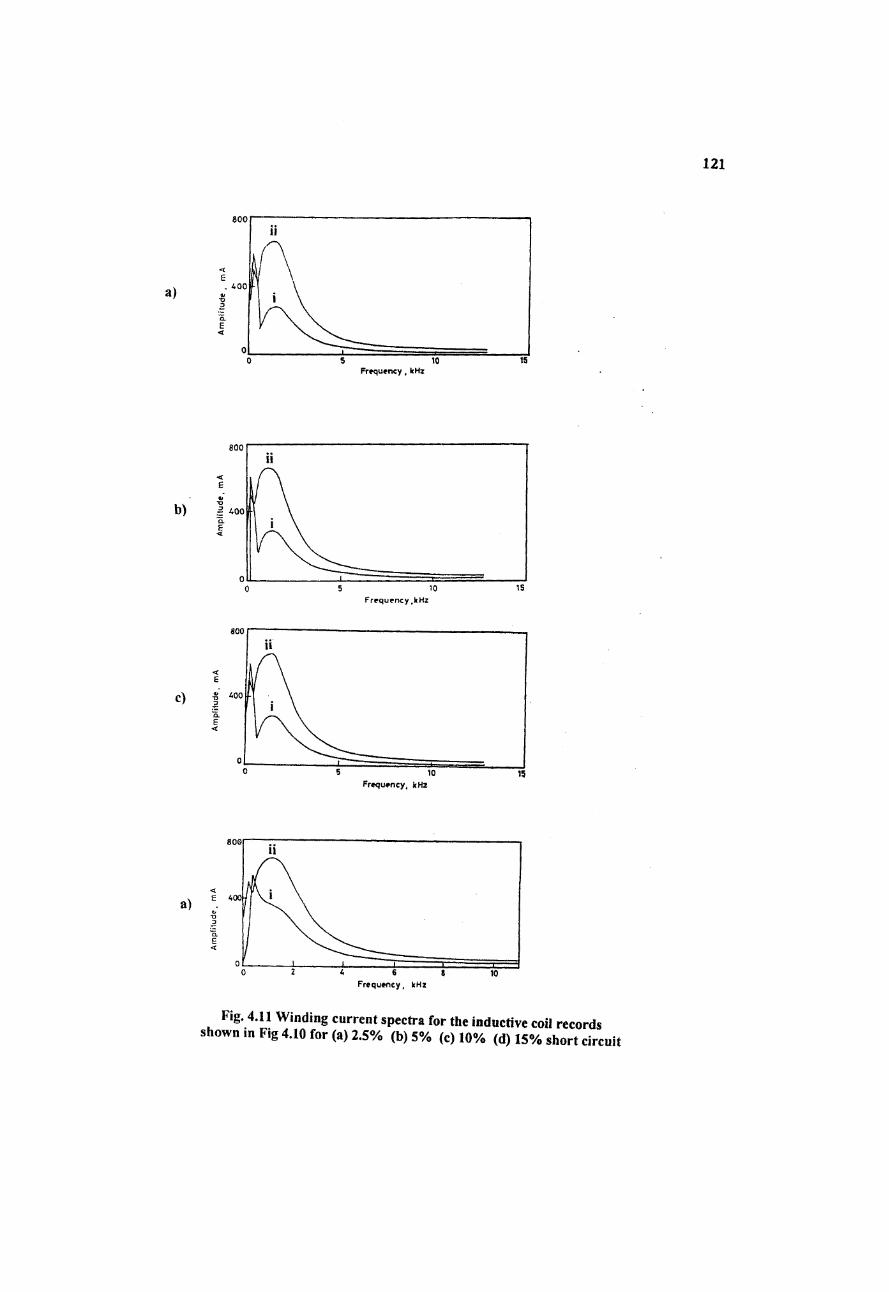
Fig.4.11 shows the corresponding magnitude spectrum of each. In
principle, this implies that greater attention is to be paid to the low frequency regions
of the response. The region before the first resonant peak, in particular, helps to
identity the magnitude of the fault.
In the method proposed here, the low frequency response of the coil is
studied in order to estimate the magnitude of the fault. With reference to the
equivalent circuit of the transformer, at the low frequencies the section is inductive.
A bandpass filter is used such that the upper cutoff frequency is well before the first
resonant frequency.
The slope of the spectrum earlier to the fundamental resonant frequency is
steeper for a higher percentage magnitude of sectional short-circuited fault.
Fig.4.12 shows the magnitude spectrum of current with the magnitude of
short simulated on 10%, 20%.... 70%, of the experimental winding. The x-axis
shows the lower frequency range of the coil and the y-axis shows the magnitude in
linear scale.
UC
RP
cp
AV
R
Fig. 4.7a Pole variation response PVR (A) f, (B) f2 (C) f3
4.7b Amplitude variation response AVR (A) 10% (B) 20% (C)25%
Percentage of winding
Fig. 4.7c Uniform coil resonance parameter UCRP (A) 10% (B) 20% (C)30%
Fig. 4.7 Percentage variation of parameter
117
3 4Peak number
3 4Peak number
Fig.4.8 Relative variation of pole peak of resonant frequencies for similar fault at (a) Top (b) middle (c) ground end of winding
Freq
uenc
y, kHz
Freq
uenc
y, kHz
116
_____________ PERCENTILE LENGTH (x/l) ____________________
Fig.4.9b Pole variation response for an input of 1.2 /6 ps on a coil of a = 4
119
PERCENTILE LENGTH (x/l)
Fig.4.9d Pole variation response for an input of 1.2 /2 ps on a coil of a = 14
____________________________________ PERCENTILE LENGTH (xfl)
Fig.4.9c Pole variation response for an inpnt of 12750 ps on a coil of a = 4
-101-0 2-0 3-0
Tim* (ms)4-0 5-0
e C g; ”
B ^
OQ
o'»2 M
2 vO
Jm
0 1 ^ ^
s>
3 S 3
fit **■
a 2̂ o
as 5?
“» a
« 3 B
sr tS m
. O
OTP 5*
sal
2. = ?
• 2 O
- n
n n
nE. w o
£o
^ 3
£ CTQ
V)
<s /-s* e<2
N»
fljJD
VJ
(N
Am
plitu
de, A
mpe
re
800
ol------------------------ 1__________________ ' r i • i
0 2 4 6 t 10Frequency, kHz
Fig. 4.11 Winding current spectra for the inductive coil records shown in Fig 4.10 for (a) 2.5% (b)5% (c) 10% (d) 15% short circuit
10 15Frequency ,kHz
10Frequency, kHz
a)
Am
plitu
de, mA03
Am
plitu
de, m
AA
mpl
itude
, mA
122
A similar response is observed while simulating destructive faults on the
Abetti coil model and the result is as shown in Fig .4.13.
In all the above cases the amplitude of current spectrum before the first
resonant peak is indicative of the percentage magnitude of the fault.
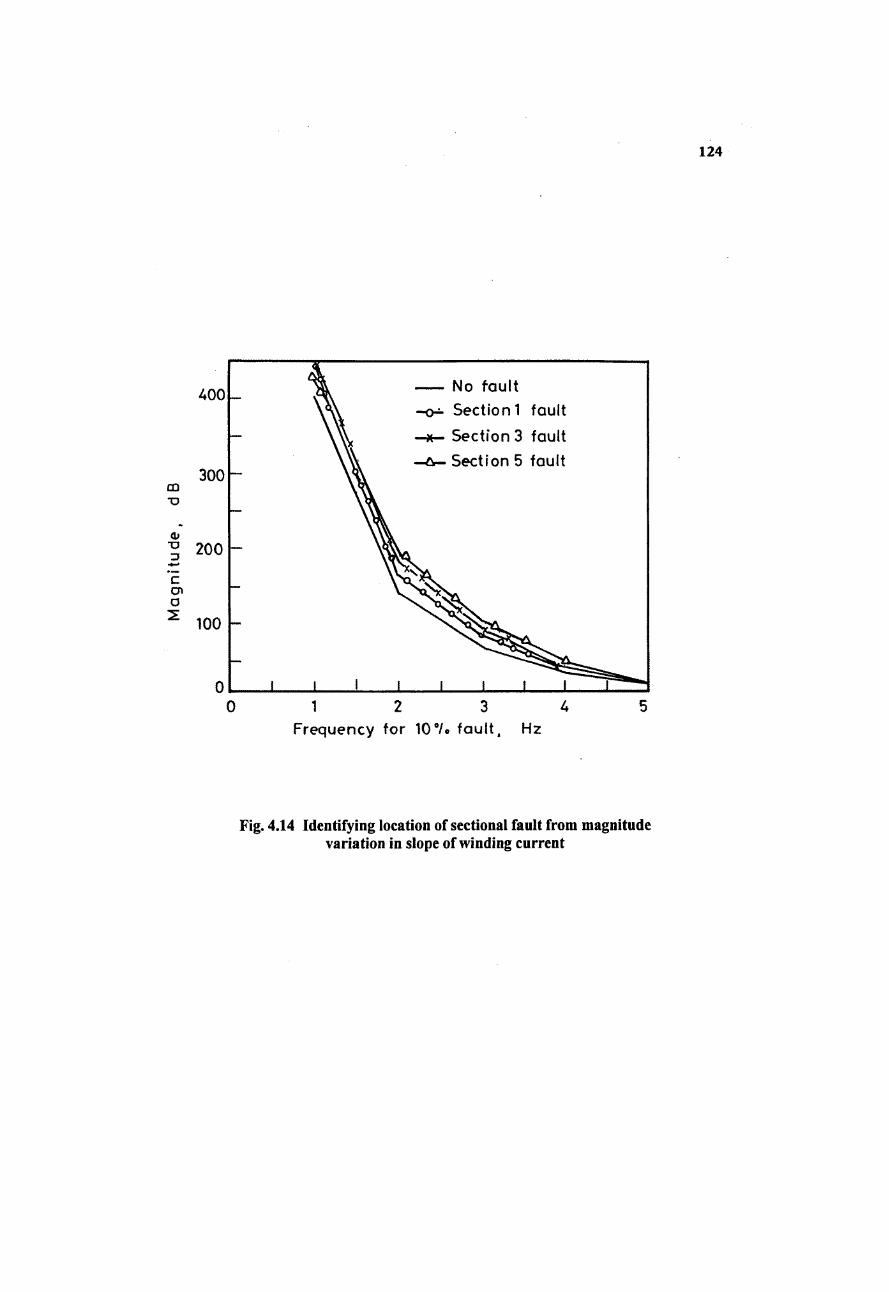
Fig. 4.14 presents another interesting result observed while simulating the
fault at various sections, along x/f% of the winding. It is noted that for the same
percentage magnitude of short-circuit fault (say 5%, 10%, 20%), across sections, a
fault near the mid-section has a steeper slope of the initial dc line of the spectrum
prior to the first resonant frequency. This indicates relatively a higher deviation in
comparison to the spectrum of the current without a winding fault. This result can
support the task for locating the site of fault.
4.6 CONFIRMATION BASED ON A RANDOM TEST
A blind test is performed, by creating an arbitrary magnitude of fault
across some section of the winding. The difference current observed is as shown
in Fig.4.3. The estimation technique described earlier with Equation (4.1) to
Equation (4.4) is applied to the waveform. Analysing the spectra as seen earlier in
Fig 4.5, Fig.4.6, Fig.4.7, Fig.4.9, Fig.4.14 and Table 4.1, the probable location of the
fault is identified. The magnitude of the fault between turns of winding is also
determined from the slope of the signal prior to the first resonant frequency as
demonstrated in Fig. 4.12.
4.6.1 RESULTS FROM OTHER SUPPLEMENT OSCILLOGRAMS
Two other supplementary oscillograms are available during the impulse
test of a two winding transformer as specified in IEC 722(1982). They are either the
transferred surge or the capacitive transferred current across the secondary.

123
Frequency, kHz
Frequency, kHz14-96
Fig. 4.12 Identification of magnitude of fault as a variation in slope before the first resonant frequency for the experimental coil
Abs
olut
e mag
nitu
de, volt
s
Fig. 4.13 Identification of magnitude of fault as a variation in slope before the first resonant frequency for the analytical coil
124
Frequency for 10*/« fault, Hz
Fig. 4.14 Identifying location of sectional fault from magnitude variation in slope of winding current
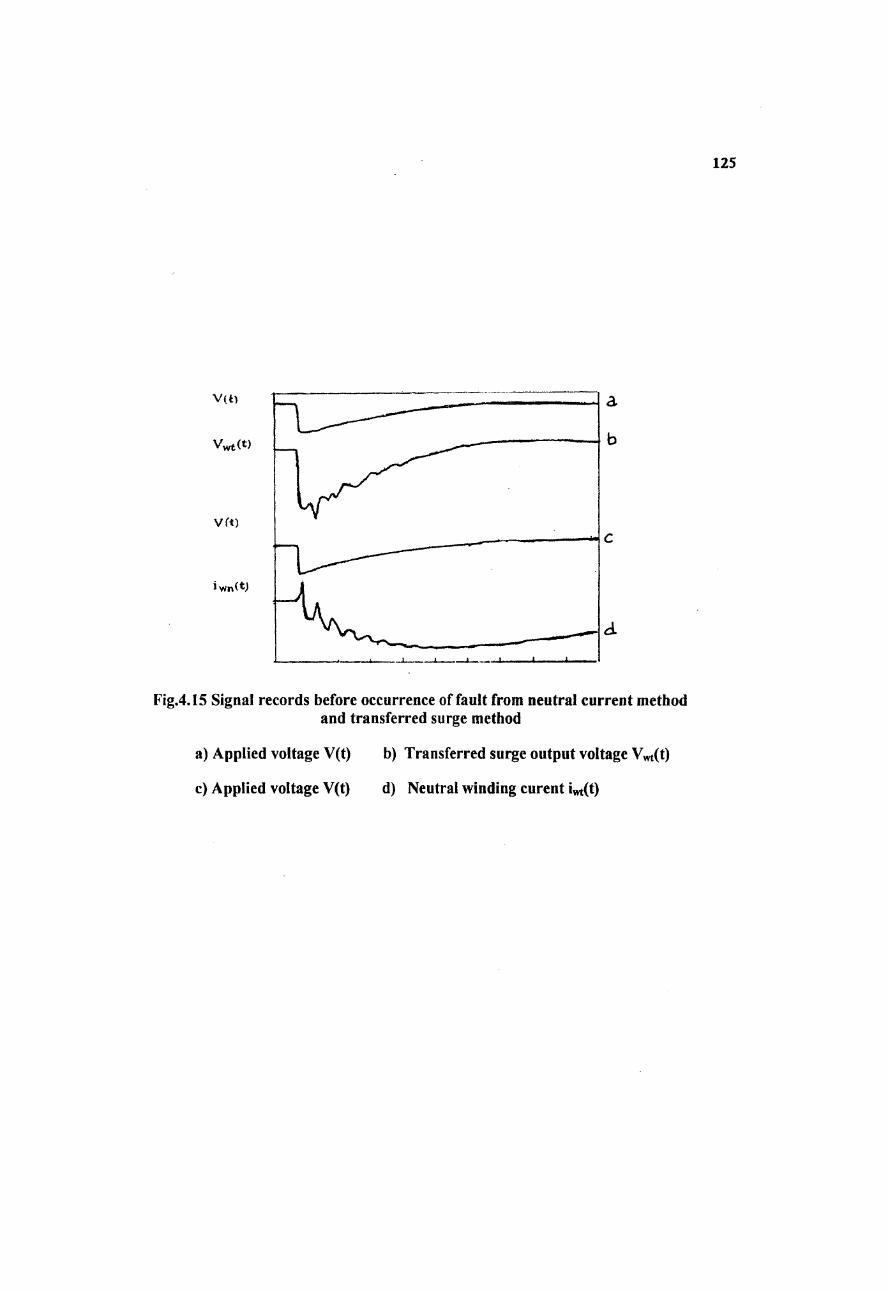
Fig.4.15 Signal records before occurrence of fault from neutral current methodand transferred surge method
a) Applied voltage V(t) b) Transferred surge output voltage Vwt(t)
c) Applied voltage V(t) d) Neutral winding curent iwt(t)
126
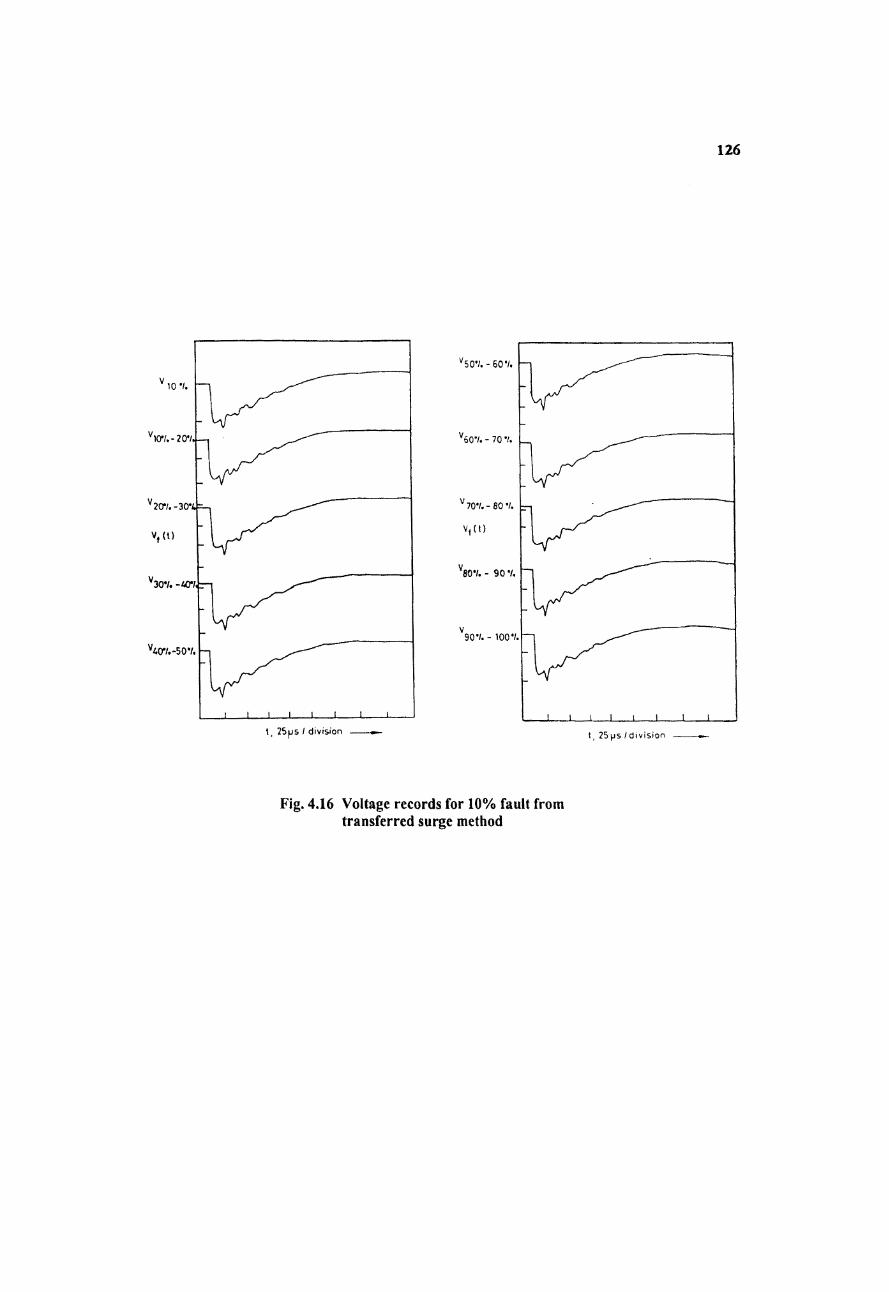
Fig. 4.16 Voltage records for 10% fault from transferred surge method
127
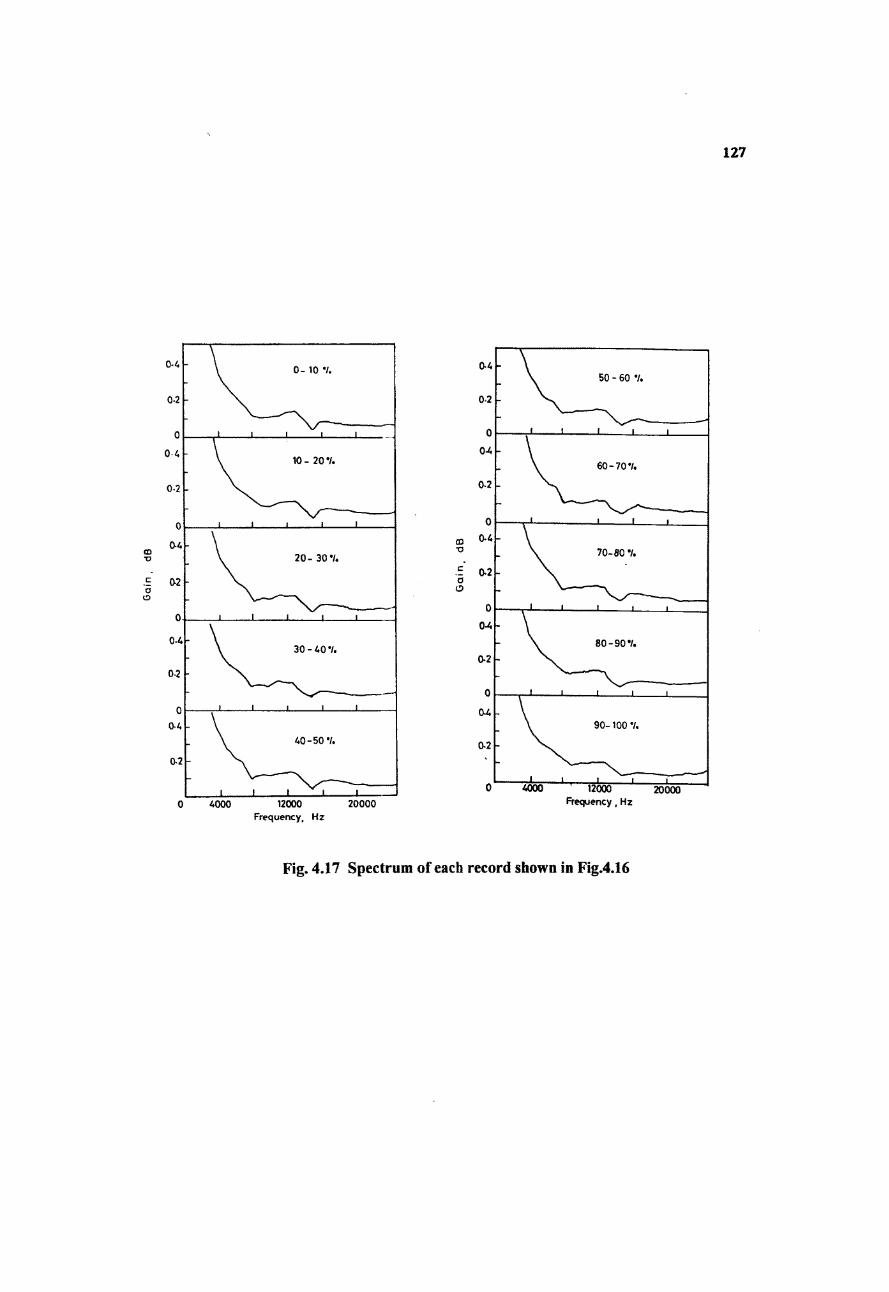
Fig. 4.17 Spectrum of each record shown in Fig.4.16
128
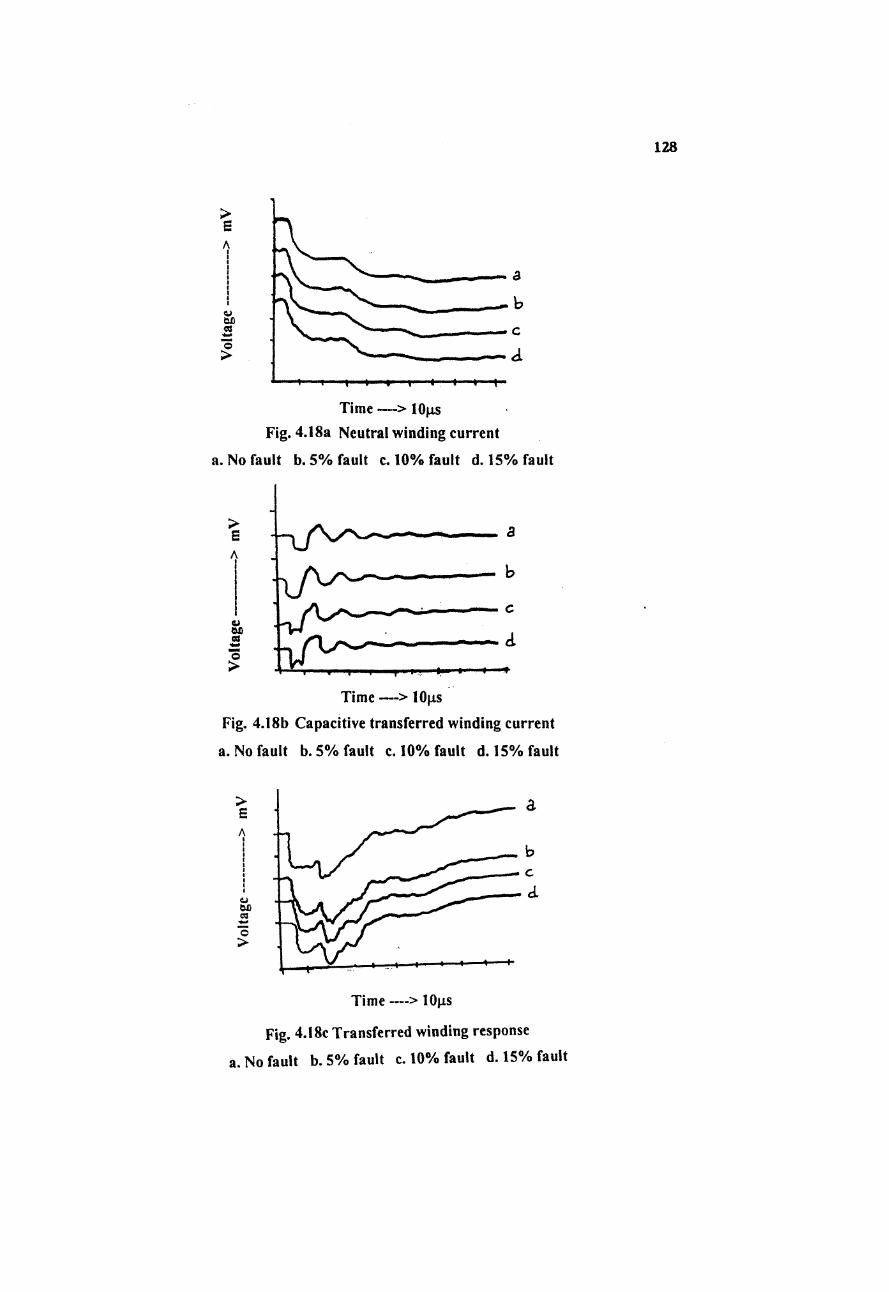
Time —> lOpsFig. 4.18b Capacitive transferred winding current
a. No fault b. 5% fault c. 10% fault d. 15% fault
.....1' i -..1................%... ...I..
Time —> lOpsFig. 4.18a Neutral winding current
a. No fault b. 5% fault c. 10% fault d. 15% fault
<0 _o
u
Vol
tage
------
---->
mVV
olta
ge---
------
-> mV
O tr
Vol
tage
------
---->
mV
Time —> lOps
Fig. 4.18c Transferred winding response a. No fault b. 5% fault c. 10% fault d. 15% fault

129
Frequency---- > 50 KHz
Fig. 4.19a Spectra of corresponding records in Fig. 4.18a
Frequency---- > 100 KHzFig. 4.19bSpectra of corresponding records in Fig. 4.18b
Frequency---- > 50 KHz
Fig. 4.19c Spectra of corresponding records in Fig. 4.18c
130
Experiments are also done to analyse the sensitivity of these two methods for fault
location.
Fig.4.15 shows typical records of voltage and winding current for the case
of the transferred voltage and the neutral current method of an unfaulted winding.
Fig.4.16 shows the records from transferred surge analysis for the experimental coil.
Fig.4.17 shows the corresponding spectra of each. However, the estimated
parameters with the neutral current are complementary to the results obtained from
the transferred surge method.
Fig.4.18 shows a sample of each of the experimental analysis using the
neutral current method, capacitive transferred surge method and transferred surge
voltage method. Fig. 4.19 shows the respective spectra for each of the records.
Similar characteristics in the estimated parameters are observed with
capacitive transferred current surge method and the transferred surge voltage method.
4.7 CONCLUSION
An attempt is made in proposing a method for the location of non-restoring
fault in transformer windings. The Abetti coil used here for simulation is a popularly
acknowledged model used in simulation studies. The results presented from
simulation and experimental study illustrate the above as a reliable method for
locating the site of defect and in detecting the magnitude of fault prior to untanking
of the transformer in test center.
Having established methods for location and identification of faults and
discharge, additional methods for fault location are possible using advanced time-
frequency (t-f) response analysis as discussed in the following chapter. Further, the
usefulness of the new t-f technique for an improved signal analysis in the presence of
noise is shown.





























