Embed Size (px)
Citation preview

128
Chapter 3
Clustering Wireless Sensor Nodes Using Caterpillar Graph
3. Introduction
A wireless sensor network is a collection of nodes organized into a cooperative
network [1].Currently, wireless sensor networks are beginning to be deployed at an
accelerated space. It is not unreasonable to expect that in 10-15 years that the world
will be covered with wireless sensor networks with access to them via the Internet.
This can be considered as the Internet becoming a physical network. This new
technology is exciting with unlimited potential for numerous application areas
including environmental, medical, military, transportation, entertainment, crisis
management, homeland defense, and smart spaces. Since a wireless sensor network is
a distributed real-time system a natural question is how many solutions from
distributed and real-time systems can be used in these new systems? Unfortunately,
very little prior work can be applied and new solutions are necessary in all areas of
the system. The main reason is that the set of assumptions underlying previous work
has changed dramatically. Most past distributed systems research has assumed that the
systems are wired, have unlimited power, are not real-time, have user interfaces such
as screens and mice, have a fixed set of resources, treat each node in the system as
very important and are location independent. In contrast, for wireless sensor networks,
the systems are wireless, have scarce power, are real-time, utilize sensors and
actuators as interfaces, have dynamically changing sets of resources, aggregate
behavior is important and location is critical. Many wireless sensor networks also

129
utilize minimal capacity devices which places a further strain on the ability to use past
solutions.
3.1 MAC
A medium access control (MAC) protocol coordinates actions over a shared channel.
The most commonly used solutions are contention-based. One general contention-
based strategy is for a node which has a message to transmit to test the channel to see
if it is busy, if not busy then it transmits, else if busy it waits and tries again later.
After colliding, nodes wait random amounts of time trying to avoid re-colliding. If
two or more nodes transmit at the same time there is a collision and all the nodes
colliding try again later. Many wireless MAC protocols also have a dozen mode
where nodes not involved with sending or receiving a packet in a given timeframe go
into sleep mode to save energy. Many variations exist on this basic scheme. In
general, most MAC protocols optimize for the general case and for arbitrary
communication patterns and workloads. However, a wireless sensor network has more
focused requirements that include a local unicast or broad cast , traffic is generally
from nodes to one or a few sinks (most traffic is then in one direction),have periodic
or rare communication and must consider energy consumption as a major factor. An
effective MAC protocol for wireless sensor networks must consume little power,
avoid collisions, be implemented with a small code size and memory requirements, be
efficient for a single application, and be tolerant to changing radio frequency and
networking conditions. One example of a good MAC protocol for wireless sensor
networks is B-MAC [2]. B-MAC is highly configurable and can be implemented with

130
a small code and memory size. It has an interface that allows choosing various
functionality and only that functionality as needed by a particular application. B-MAC
consists of four main parts: clear channel assessment (CCA), packet back off, link
layer acks, and low power listening. For CCA, B-MAC uses a weighted moving
average of samples when the channel is idle in order to assess the background noise
and better be able to detect valid packets and collisions. The packet back off time is
configurable and is chosen from a linear range as opposed to an exponential back off
scheme typically used in other distributed systems. This reduces delay and works
because of the typical communication patterns found in a wireless sensor network. B-
MAC also supports a packet by packet link layer acknowledgement. In this way only
important packets need pay the extra cost. A low power listening scheme is employed
where a node cycles between awake and sleep cycles. While awake it listens for a
long enough preambles to assess if it needs to stay awake or can return to sleep mode.
This scheme saves significant amounts of energy. Many MAC protocols use a request
to send (RTS) and clear to send (CTS) style of interaction. This works well for ad hoc
mesh networks where packet sizes are large (1000s of bytes). However, the overhead
of RTS-CTS packets to set up a packet transmission is not acceptable in wireless
sensor networks where packet sizes are on the order of 50 bytes. B-MAC, therefore,
does not use a RTS-CTS scheme. Recently, there has been new work on supporting
multi-channel wireless sensor networks. In these systems it is necessary to extend
MAC protocols to multi-channel MACs. One such protocol is MMSN[3] . These
protocols must support all the features found in protocols such as B-MAC, but must
also assign frequencies for each transmission. Consequently, multi-frequency MAC
131
protocols consist of two phases: channel assignment and access control. The details
for MMSN are quite complicated and are not described here. On the other hand, we
expect that more and more future wireless sensor networks will employ multiple
channels (frequencies). The advantages of multi-channel MAC protocols include
providing greater packet throughput and being able to transmit even in the presence of
a crowded spectrum.
3.1.1 Routing
Semantics may be that a single node closest to the geographic destination is to be the
unicast node. Second, the semantics could be that all nodes within some area around
the destination address should receive the message. This is an area multicast. Third, it
may only be necessary for any node, called any cast, in the destination area to receive
the message. The SPEED [4] protocol supports these 3 types of semantics. There is
also often a need to flood (multicast) to the entire network. Many routing schemes
exist for supporting efficient flooding.
Real-Time: For some applications, messages must arrive at a destination by a
deadline. Due to the high degree of uncertainty in WSN it is difficult to develop
routing algorithms with any guarantees. Protocols such as SPEED [5] and RAP [6]
use a notion of velocity to prioritize packet transmissions. Velocity is a nice metric
that combines the deadline and distance that a message must travel.
Mobility: Routing is complicated if either the message source or destination or both
are moving. Solutions include continuously updating local neighbor tables or
identifying proxy nodes which are responsible for keeping track of where nodes are.

132
Proxy nodes for a given node may also change as a node moves further and further
away from its original location.
Voids: Since WSN nodes have a limited transmission range, it is possible that for
some node in the routing path there are no forwarding nodes in the direction a
message is supposed to travel. Protocols like GPSR [7]. Solve this problem by
choosing some other node “not” in the correct direction in an effort to find a path
around the void.
Security: If adversaries exist, they can perpetrate a wide variety of attacks on the
routing algorithm including selective forwarding, black hole, Sybil, replays,
wormhole and denial of service attacks. Unfortunately, almost all WSN routing
algorithms have ignored security and are vulnerable to these attacks. Protocols such as
SPINS [8] have begun to address secure routing issues.
Congestion: Today, many WSN have periodic or infrequent traffic. Congestion does
not seem to be a big problem for such networks. However, congestion is a problem
for more demanding WSN and is expected to be a more prominent issue with larger
systems that might process audio, video and have multiple base stations (creating
more cross traffic). Even in systems with a single base station, congestion near the
base station is a serious problem since traffic converges at the base station. Solutions
use backpressure, reducing

133
3.2 Design Challenges
Several design challenges present themselves to designers of wireless sensor network
applications. The limited resources available to individual sensor nodes implies
designers must develop highly distributed, fault-tolerant, and energy efficient
applications in a small memory-footprint. Some features of wireless sensor nodes are:
1. Individual nodes in a wireless sensor network have limited computational power
and storage capacity. They operate on nonrenewable power sources and employ a
short-range transceiver to send and receive messages.
2. The number of nodes in a wireless sensor network can be several orders of
magnitude higher than in an ad hoc network. Thus, algorithm scalability is an
important design criterion for sensor network applications.
3. Sensor nodes are generally densely deployed in the area of interest. This dense
deployment can be leveraged by the application, since nodes in close proximity can
collaborate locally prior to relaying information back to the base station.
4. Sensor networks are prone to frequent topology changes. This is due to several
reasons, such as hardware failure, depleted batteries, intermittent radio interference,
environmental factors, or the addition of sensor nodes. As a result, applications
require a degree of inherent fault tolerance and the ability to reconfigure themselves
as the network topology evolves over time.
Wireless sensor networks do not employ a point-to-point communication paradigm
because they are usually not aware of the entire size of the network and nodes are not
uniquely identifiable. Consequently, it is not possible to individually address a
specific node. Paradigms, such as directed diffusion [9, 10] employ a data-centric

134
view of generated sensor data. Nodes request data by disseminating interests for this
named data throughout the network. Data that matches the criterion are relayed back
toward the querying node.
Even with the limitations individual sensor nodes possess and the design challenges
application developers face, several advantages exist for instrumenting an area with a
wireless sensor network [11].Due to the dense deployment of a greater number of
nodes, a higher level of fault tolerance is achievable in wireless sensor networks. .
Coverage of a large area is possible through the union of coverage of several small
sensors. Coverage of a particular area and terrain can be shaped as needed to
overcome any potential barriers or holes in the area under observation. It is possible to
incrementally extend coverage of the observed area and density by deploying
additional sensor nodes within the region of interest. An improvement in sensing
quality is achieved by combining multiple, independent sensor readings. Local
collaboration between nearby sensor nodes achieves a higher level of confidence in
observed phenomena. . Since nodes are deployed in close proximity to the sensed
event, this overcomes any ambient environmental factors that might otherwise
interfere with observation of the desired phenomenon.
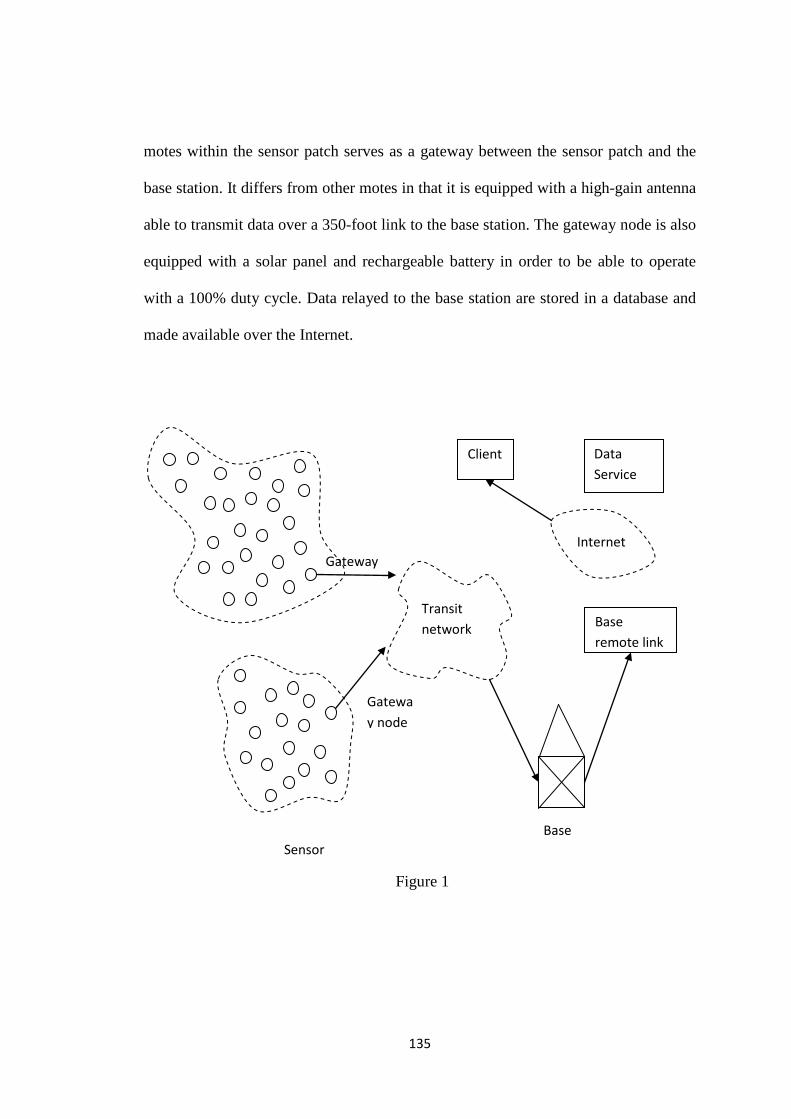
3.2.1 Architecture
The wireless sensor network architecture is divided into distinct tiers Fig. 1. The
lowest level consists of autonomous motes, equipped with various sensors that
perform basic networking, computing, and sensing tasks. They are organized into a
local one-hop network and collectively identified as a sensor patch. One of the sensor
135
motes within the sensor patch serves as a gateway between the sensor patch and the
base station. It differs from other motes in that it is equipped with a high-gain antenna
able to transmit data over a 350-foot link to the base station. The gateway node is also
equipped with a solar panel and rechargeable battery in order to be able to operate
with a 100% duty cycle. Data relayed to the base station are stored in a database and
made available over the Internet.
Client Data Service
Base remote link
Transit network
Base Sensor
Gateway node
Internet Gateway
Figure 1

136
3.3 Clustering
Clustering analysis is desirable in nearly any field of study where it is beneficial to
group data into similar sets depending on one’s objective in analyzing a set of data
one might define similarity between elements differently and thus a clustering process
could be optimized to provide numerous way of grouping a set of elements. In order
to create any sort of clustering algorithm and determine its effectiveness it is
necessary to find some way to quantity similarity between elements. When sensor
nodes are organized in clusters they could use either single hop or multi hop mode of
communication to send their data to their respective cluster heads. The sensor nodes
are randomly and uniformly distributed over the region and the nodes are organized in
clusters to take advantage of possible data aggregation at the cluster head nodes.
There are two types of nodes; cluster head nodes and sensor nodes. The cluster head
nodes act as the fusion points within the network. During each data gathering cycle
the sensor nodes send their sensed data to the closest cluster head node which perform
data aggregation. Then the cluster head directly transmits the aggregated data to a
base station. The sensor nodes have simple functionality, since they perform sensing
and relatively short-range communication. However the cluster head nodes are more
complex, since they coordinate MAC and routing within their cluster perform data
fusion and perform long range transmissions to the remote base station. The overall
system design problem involves determining the optimum number of cluster head
nodes the optimum node of communication within a cluster (Single hop or Multi
hop).Some of the objectives of the clustering nodes are as follows

137
• Involves grouping nodes into clusters and electing a CH
• Members of a cluster can communicate with their CH directly
• CH can forward the aggregated data to the central base station through
other CHs
• Clustering Objectives
• Allows aggregation
• Limits data transmission
• Facilitate the reusability of the resources
• CHs and gateway nodes can form a virtual backbone for intercluster
routing
• Cluster structure gives the impression of a smaller and more stable
network
• Improve network lifetime
• Reduce network traffic and the contention for the channel
• Data aggregation and updates take place in CHs
Various clustering algorithms have been proposed to organize sensor nodes in a
wireless sensor network into clusters. [1][2][3][4][5][6](Papers). Each aim to meet
certain needs of the system. This could provide a system having low clustering related
maintenance cost or energy efficient clusters to minimize energy consumption
suitable for sensor nodes with energy constraints or for load balancing to distribute
the workload of a network. The fig2 illustrates the concept of clusters.

138
Wireless sensor networks are networks of wireless nodes that are deployed over an area for
the purpose of monitoring certain phenomena of interest. The nodes perform certain
measurements process the measured data and transmit the processed data to a base station
over a wireless channels. The base station collects data from all the nodes and analyzes this
data to draw conclusion about the activity in the area of interest. These networks are different
from the traditional wireless ad hoc networks. However, when nodes are organized in clusters
and when they use multi hop communication to reach the cluster head the nodes closer to a
cluster head have a higher load of relaying packets as compared to other nodes. However is
Cluster member
Clusterhead
Gateway node
Intra - Cluster Cross - Cluster
Figure 2

139
most sensor networks nodes are static consequently the nodes closer to the cluster head get
overburdened constantly. The cluster heads themselves have the extra burden of performing
long rang transmissions to the distant base station.
We consider a region to be covered by sensor nodes. The number of sensor nodes is
determined by the application requirements. Usually each sensor node has a sensing radius
and it is required that the sensor nodes provide coverage of the region with a high probability.
The sensing radius of each node depends on the phenomenon that is being sensed as well as
the sensing hardware of the node. Thus in general the required number of sensor nodes is
dictated by the application and hence we assume it to be a constant.
3.3.1 Clustering Algorithm
Consider a wireless network represented by a connected graph where the
vertex set contains nodes and is the edge set. We assume that the nodes form
clusters in such a manner that the following assumptions are satisfied: . Each node
belongs to one and only one cluster.2. In each cluster, there is a node which is
adjacent to all the remaining nodes in the cluster. Such a node is called a cluster-head.
(If more than one such nodes exist, only one is chosen). Two clusters are called
adjacent (or neighbors) if there is a direct link joining them. Assume that through
some information exchange, a cluster-head knows all its neighboring clusters. In the
case that two clusters are joined by more than one links, we assume that the cluster-
heads of both clusters agree on a single such link being activated. The end nodes of
active links are called gateway nodes. The set of cluster-heads by our assumption is a
dominating set, i.e., a subset of nodes which are at most 1 hop away from any node.

140
The well-known minimum dominating set (MDS) problem seeks a dominating set of
minimum size, and has been proven to be -hard. In the following, we describe
hence its degree (i.e., the number of neighbors). Initially, a non-iterative
decentralized clustering algorithm for choosing a dominating set. Assume that each
node knows its one-hop neighbors, each node sets its own flag to , meaning that it
does not yet belong to any cluster. At a certain time, each node starts a timer with
length drawn from an exponential distribution with rate If node ’s timer expires
at , it becomes a cluster-head. It sets its flag to , and broadcasts a “cluster
initialize” message to all its neighbors. Each of its neighbors with flag signals its
intention to join the cluster by replying with a “cluster join” message. It also sets its
own flag to and stops the timer. At the end, clusters satisfying the two properties
mentioned above are formed. The particular choice of timers ensures that high degree
nodes have more chances to become cluster-heads, somewhat like a greedy algorithm.
3.4 Graph Terminology
We use an undirected graph with edges and nodes, to represent a
snapshot of the wireless sensor network. Each node in represents a mobile host, and
each edge in signifies that two hosts are within transmission range of each other.
The topology of is the set of edges and nodes. Hence, when we say a node
movement changes the topology, we mean a change in the network that results in a
change in either or . Specifically, an edge deletion occurs when two hosts lose
communication with each other, and an edge insertion occurs when two hosts move

141
into range of each other. A node deletion in isolation occurs when a host turns off its
power, and a node insertion in isolation occurs when a host turns on its power. By “in
isolation” we mean that no other change has occurred in the network. Because a node
insertion or deletion affects multiple edges, we process these changes to as multiple
changes to . Finally, the most general node movement models the movement of a
host from one part of the network to another; hence, a node movement is a
combination of a node deletion from one part of and a node insertion in another part
of . The open neighborhood of node represents all hosts within
transmission range of except for itself. The closed neighborhood of also
includes , that is, . With these definitions extended to subsets of
, the open neighborhood of ∈ , and the closed
neighborhood of is . The degree of v is the size of its open
neighborhood: The maximum degree of is ∈ For
the purposes of analysis of overhead, we assume that a local broadcast takes
time (which is true if the MAC layer can schedule local broadcasts reliably). Given a
subgraph of , the –degree of is , the number of ’s neighbors that are in
. The maximum degree of is denoted . The diameter of is the
maximum number of edges contained in any simple path between two nodes in .
The diameter of a subgraph of is denoted
We use an approximation to a minimum connected dominating set (MCDS). A
subset is a dominating set if . Let be the subgraph induced by
is a connected dominating set if, in addition to , is

142
connected. Since finding an MCDS is an -complete problem that is also hard to
approximate we present a distributed greedy MCDS approximation algorithm that is
similar to the algorithm in. The MCDS nodes are incidentally also the interior nodes
of a maximum leaf spanning tree.
We use the interior of this tree as the back bone. Thus, each node in has a unique
dominator in , denoted .The set ∈ is a maximum leaf
spanning tree. The nodes of comprise the interior of this spanning tree, and the
edges of this spanning tree between nodes in are called back bone edges. Wireless
sensor networks can be deployed for many application unlike wired networks or
cellular networks no physically backbone infrastructure is installed in wireless sensor
networks. A communication session is achieved either through a single hop if the
communication parties are close enough or through relating by intermediate nodes
otherwise. The topology of such wireless ad hoc network can be modeled as a unit
disk graph a geometric graph in which there is an edge between two nodes if and only
if there distance is at one unit as show in fig 3
Figure 3

143
Although a wireless sensor network has no physical backbone infrastructure a virtual
back bone can be formed by nodes in a connected dominating set of the corresponding
unit disk graph [6][7][8]. Such a virtual backbone plays a very important role in
routing, broadcasting, and connectivity managements in wireless sensor networks
3.4.1 Clustering Using Dominating Sets
A dominating set is a subset of a graph such that every vertex in is either in
or adjacent to a vertex in [12]. Dominating sets are widely used in clustering
networks [8]. Dominating sets can be classified into three main classes, Independent
Dominating Sets (IDS), Weakly Connected Dominating Sets (WCDS) and Connected
Dominating Sets (CDS) [13]
Independent Dominating Sets: IDS is a dominating set of a graph in which there
are no adjacent vertices.
Weakly Connected Dominating Sets (WCDS): A weakly induced sub graph is a
subset of a graph that contains the vertices of , their neighbors and all edges of
the original graph with at least one endpoint in . A subset is a weakly-connected
dominating set, if is dominating and is connected [14].
Connected Dominating Sets: A connected dominating set (CDS) is a subset of a
graph such that forms a dominating set and is connected.
Clustering Using IDS: Baker and Ephremides [15] proposed an independent
dominating set algorithm called highest vertex ID. A very similar algorithm to the
highest id algorithm is the lowest id algorithm by Gerla and Tsai [16].”Gerla and
Tsai” developed another algorithm to find the independent dominating sets called the

144
highest degree algorithm. Although these algorithms are considered as important
algorithms, Chen et al. [17] proposed that these algorithms are not working correctly
for some graphs. To solve this incorrect operation, Chen et al developed the -
distance independent dominating set algorithm.[18].
Clustering Using WCDS: Although independent dominating sets are suitable for
constructing optimum sized dominating sets, they have some deficiencies such as lack
of direct communication between cluster heads. In order to obtain the connectivity
between cluster heads, WCDSs can be used to construct clusters. A Dominating Set
Based Clustering Algorithm for Mobile Ad Hoc Networks 573. The WCDS was first
proposed for clustering in ad hoc networks by Chen and Liestman [19] called zonal
clustering.
Clustering Using CDS: CDS have many advantages in network applications such as
ease of broadcasting and constructing virtual backbones [20],however, when we try to
obtain a connected dominating set, we may have undesirable number of cluster heads.
So, in constructing connected dominating sets, our primary problem is to find a
minimal connected dominating set. Guha and Khuller [21] proposed two centralized
greedy algorithms for finding suboptimal connected dominating sets. Das and
Bharghavan [22] provided distributed implementations of Ghua and Khuller’s
algorithms [23]. Wu and Li [24] improved Das and Bhraghavan’s distributed
algorithm as a localized distributed algorithm for finding connected and Ophir
Frieder [25] proposed a distributed algorithm for finding a CDS which constructs the
dominating set using the Maximal Independent Sets. Hui Liu, Yi Pan and Jiannong
Cao [26],”Improved Wu and Li’s algorithm” [27] by adding a third phase elimination.

145
In the additional third phase, the algorithm searches redundant cluster heads. A cluster
head is eliminated if it is dominated by two of its cluster head neighbors.
3.5 Caterpillar Graphs
A caterpillar graph is a tree having a chordless path , called the backbone
that contains at least one end point of every edge. Edges connecting the leaves with
the backbone are called hairs. In a complete caterpillar graph, each vertex of its
backbone has a nonempty set of hairs denoted by a complete caterpillar graph
with backbone .
We can use a simple graph to represent an wireless sensor network,
where represents a set of wireless mobile hosts and represents a set of edges. An
edge between host pairs indicates that both hosts and are within their
wireless transmitter ranges. To simplify our discussions, we assume all mobile hosts
are homogeneous i.e. their wireless transmitter ranges are the same. In other word, if
there is an edge in E, it indicates is within ’s range and is within ’s
range. Thus the corresponding graph will be an undirected graph. The graph in fig3
represents the corresponding wireless sensor network.
Figure 4

146
Lemma 1 ([28]). If is a chord less path with vertices, then
≥ two vertices
are twins in a graph if they have the same neighborhood. Jou et al [28] proved the
following properties.
Lemma 2. If and are twins in a graph then
Lemma 3. If is an induced subgraph of , then
Lemma 4. ([29]) For any two disjoint graphs and Let
For each , ) is the set of its
pendent vertices and is an independent set but it
is not maximal in If same vertex of belongs to a MIS then every vertex
of ) must belongs to it otherwise it is not maximal. As two vertices of are
twins in , we can construct them in to a single vertex, called hi, that represents
the whole set . Let be the construction group of
otherwise that is also a caterpillar graph with at most one pendent vertex at
each the contraction graph of a complete caterpillar graph is also complete.
Here, we can deploy the wireless sensor nodes in the form of caterpillar graphs as
shown in the fig. 4.But our objective here is to retain the connected dominating set
from the caterpillar graphs. Because the nodes in the set of connected dominating set
are cluster heads which has many applications in wireless sensor networks.We are
using linear algorithm to retain connected dominating set (CDS).
147
3.6 Linear Algorithm
Efficient liner algorithm for the domination number of a tree designed by
Cockayne,S Goodman and S Hedetniemi Cock et al [30] proposed their “a liner
algorithm for finding the domination number of a tree”, Partitioning the tree in
to three subsets where consists of free vertices, consists of bound
vertices and consists of required vertices. They have coined the one more term
called mixed domination set in is set of vertices which contain all required
vertices i.e. and which dominate all bound vertices i.e. every vertex ∈ is
either in or is adjacent to at least one vertex in . Free vertices need not be
dominated by but may be included in in order to dominate bound vertices. The
mixed dominating set in such a set is called an set of . Here we are applying
this algorithm on caterpillar graphs. Once we traced the algorithm on caterpillar graph
we get a a connected dominating set. Let us consider the algorithm.
Let the vertices of network be partitioned in to three subsets, ,
where consists of free vertices, consists of bound vertices and consist
required vertices. A mixed dominating set in G is set of vertices M which contains all
required vertices, i.e. and which dominates all bound vertices, i.e. every
vertex either in or is adjacent to at least one vertex in . Free vertices need
not be dominated by but may be included in in order to dominate bound vertices.
The mixed domination number is the minimum order of a mixed dominating
set in ; such a set is called an - set of .

148
The construction and correctness of the next algorithm is based on the following
theorem.
3.7 Theorem: [30] Let be a tree having free, bound and required vertices
respectively. Let be an end vertex of which is adjacent to vertex .
Then
(i) If , then ;
(ii) If and is the tree which results from deleting and relabeling
as “required”, then ;
(iii) If and , then
(iv) If and and if is the tree which results from deleting and
relabeling as “free”, then
Proof.(i) If ∈ , then since is free it need not be dominated in mixed
dominating set of . Thus any mixed dominating set of is also a mixed
dominating set of i.e. . Conversely, let be an set
of and let the free end vertex be a adjacent to vertex . Now if , the is
also a mixed dominating set of On the other hand if then
is mixed dominating set of Thus in either case.
.

149
(ii) The proof of this case, where the end vertex is bound, is virtually identical to
case (i) i.e must be dominated in any - set of . In this case we can show that
if is an set of then so is , i.e. there is an –set of
which contains . But this –set must also be an -set of , in
which is considered a required vertex.
(iii) The proof of this case is obvious and is omitted.
(iv) Let be an – set of in which is deleted and is labeled ‘free’. Then
clearly, is a mixed dominating set of , i.e.
Conversely let be an - set of . Since is required, We need to
consider two cases. If is also in , then is mixed dominating set of
similarly if then, since is free in , is also mixed dominating set
in . In either case – and with the previous inequality we
conclude,

150
3.8 Algorithm DOMSET. To find a -Set, or – Set, DOMSET, in a tree
T with free, bound and required vertices.
Step 0. [Initialize] Set DOMSET ← φ ; ← .
Step 1. [Delete end vertices one at a time]
Do
Step 2. has a free end vertex adjacent to a vertex
Step 3.set ← –
Step 4. has a bound end vertex adjacent to vertex
Step 5.Relabel as required;
Step 6.Set ← – .
Step7. has a required end vertex adjacent to a vertex
Step 8.Set ←
Step 9.If is bound then label as free
Step 10.Set ← –
od
Step11. [Process last vertex] If the last vertex is not free
then ←
Grouping sensor nodes into clusters in order to achieve the network scalability
objective. Every cluster would have a leader often referred to as cluster head (CH).
Recently a number of clustering algorithm have been specifically designed for WSN.
These proposed clustering techniques widely vary depending on the node deployment.
In this algorithm we need to deploy sensors in the form of caterpillar graphs and

151
tracing the algorithm on caterpillar graphs finally it left with path which is itself a
connected dominating set and all the nodes in the connected dominating sets are
cluster heads (CH).A CH may also be just one of the sensors or a node that is richer in
resources. The cluster membership may be fixed or variable. In addition to supporting
network scalability. Clustering has numerous advantages It can localize the route set
up within the cluster and thus reduce the size of the routing table store at the
individual node.
3.9 Conclusion
We studied the problem of the design of wireless sensor networks from the point of
view of the caterpillar graphs retaining the connected dominating set (CDS) of
caterpillar graphs. The CDS is itself a cluster head of the sensor nodes. And we utilize
the exiting linear time algorithm for finding domination number of a tree. Applying
this algorithm systematically on caterpillar graphs we get a connected dominating set.

152
References
[1]J. Hill, R. Szewczyk, A, Woo, S. Hollar, D. Culler, and K. Pister, System
Architecture Directions for Networked Sensors, ASPLOS, November 2000.
[2]. J. Polastre, J. Hill and D. Culler, Versatile Low Power Media Access for Wireless
Sensor Networks,ACM SenSys, November 2004.
[3] G. Zhou, C. Huang, T. Yan, T. He and J. Stankovic, MMSN: Multi-Frequency
Media Access Control for Wireless Sensor Networks, Infocom, April 2006.
[4] T. He, J. Stankovic, C. Lu and T. Abdelzaher, A Spatiotemporal Communication
Protocol for Wireless Sensor Networks, IEEE Transactions on Parallel and
Distributed Systems, to appear
[5] T. He, J. Stankovic, C. Lu and T. Abdelzaher, A Spatiotemporal Communication
Protocol for Wireless Sensor Networks, IEEE Transactions on Parallel and
Distributed Systems, to appear.
[6] J. Liu, M. Chu, J.J. Liu, J. Reich and F. Zhao, State-centric Programming for
Sensor and Actuator Network Systems, IEEE Pervasive Computing, October 2003.
[7]” B. Karp and H. T. Kung, GPSR: Greedy Perimeter Stateless Routing for Wireless
Sensor Networks,IEEE Mobicom, August 2000. ”
[8] A. Perrig, R. Szewczyk, J. Tygar, V.Wen, and D. Culler, SPINS: Security
Protocols for Sensor Networks,ACM Journal of Wireless Networks, September 2002.
[9] C. Intanagonwiwat, R. Govindan, and D. Estrin. Directed diffusion: A scalable
and robustcommunication paradigm for sensor networks. In Proceedings of the 6th
Annual International Conference on Mobile Computing and Networking, pages 56–
67, ACM Press,2000.

153
[10] C. Intanagonwiwat, R. Govindan, D. Estrin, J. Heidemann, and F. Silva. Directed
diffusion for wireless sensor networking. IEEE/ACM Transactions on
Networking,11(1):2–16, 2003.
[11] J. Agre and L. Clare. An integrated architecture for cooperative sensing
networks. IEEE Computer, pages 106–108, May 2000..
[12]. West, D. : Introduction to Graph Theory, Second edition, Prentice Hall, Upper
Saddle River, N.J., (2001).
[13] Haynes, T., W., Hedetniemi, S., T. and Slater, P., J. : Domination in
Graphs,Advanced Topics, Marcel Dekker, Inc., (1998).
[14] Chen, Y., Z., P., Liestman, A., L. and Jiangchuan, L. : Clustering Algorithms for
Ad Hoc Wireless Networks, Nova Science Publishers, (2004).
[15] Baker, D. and Ephremides, A. : The Architectural Organization of a Mobile
Radio Network via a Distributed Algorithm, Communications, IEEE Transactions,
(1981), 29(11), 1694-1701.
[16] Gerla, M. and Jack T., C., T. : Multicluster, Mobile, Multimedia Radio
Network,Wireless Networks, 1(3), (1995), 255-265.
[17] Chen, G., Nocetti, F.,G., Gonzalez and J.S., Stojmenovic, I. : Connectivity Based
K-Hop Clustering in Wireless Networks, System Sciences, Proc. of the 35th Annual
Hawaii International Conference, (2002), 2450-2459.
[18] Ohta, T., Inoue, S. and Kakuda, Y. : An Adaptive Multihop Clustering Scheme
for Highly Mobile Ad Hoc Networks, Proc. of 6th ISADS’03, (2003).

154
[19] Chen, Y., P. and Liestman, A., L. : A Zonal Algorithm for Clustering Ad Hoc
Networks, International Journal of Foundations of Computer Science, (2003),
14(2),305-322.
[20] Stojmenovic, I., Seddigh M. and Zunic, J. : Dominating Sets and Neighbor
Elimination-Based Broadcasting Algorithms in Wireless Networks, IEEE
Transactions on Parallel and Distributed Systems, (2002), 13, 14-25. ”
[21] Guha S. and Khuller, S. : Approximation Algorithms for Connected Dominating
Sets, Springer Verlag New York, LLC, ISSN: 0178-4617, (1998).
[22] Das, B. and Bharghavan, V. : Routing in Ad-Hoc Networks Using Minimum
Connected Dominating Sets, Communications, ICC97 Montreal, ’Towards the
Knowledge Millennium’, IEEE International Conference, (1997), 1, 376-380
[23]. Wu and Li [14],” Wu, J. and Li, H. : A Dominating-Set-Based Routing Scheme
in Ad Hoc Wireless Networks, Springer Science Business Media B.V., Formerly
Kluwer Academic Publishers B.V. ISSN: 1018-4864, (2001).
[24] Wu, J. and Li, H. : A Dominating-Set-Based Routing Scheme in Ad Hoc
Wireless Networks, Springer Science+Business Media B.V., Formerly Kluwer
Academic Publishers B.V. ISSN: 1018-4864, (2001).
[25] Wan, P., J., Alzoubi, K., M. and Frieder, O. : Distributed Construction of
Connected Dominating Set in Wireless Ad Hoc Networks, Springer Science+Business
Media B.V., Formerly Kluwer Academic Publishers B.V., , (2002), 9(2), 141-149
[26], “Liu, H., Pan, Y. and Cao, J. : An Improved Distributed Algorithm for
Connected Dominating Sets in Wireless Ad Hoc Networks, Parallel and Distributed
Processing and Applications, Proc. of the ISPA 2004, (2004), 340.

155
[27]Liu, H., Pan, Y. and Cao, J. : An Improved Distributed Algorithm for Connected
Dominating Sets in Wireless Ad Hoc Networks, Parallel and Distributed Processing
and Applications, Proc. of the ISPA 2004, (2004), 340.
[28] J.Liu, Maximal Independent Sets in Bipartite Graphs, Journal of Graph Theory
17(1993)495-507.
[29]M Hujter, Z. Tuza, The Number of Maximal Independent Sets In Triangle – Free
Graph, SIAM Journal on Discrete Mathematics 6(1993)284-288.
[30] E Cockayne,S. Goodman, and S.Hedetniemi, A Linear Algorithm for the
Domination Number of A Tree Volume 4,number 2 ,1975








![Selection of E ciently Adaptable Clustering Algorithm upon ... · WSN [1,2] consists of a large number of sensor nodes, moreover these sensor nodes run on non rechargeable batteries](https://img.dokumen.tips/doc/110x75/5e85fe5c2f43d468e906ff44/selection-of-e-ciently-adaptable-clustering-algorithm-upon-wsn-12-consists.jpg)




















