Embed Size (px)
Citation preview

CHAPTER 3
BACKGROUND AND RELATED WORK
This chapter will provide the background knowledge required for the rest of this thesis. It will
start with the definition of the input signal function and terminology related to the
triangulation mesh. This will be followed by a discussion of the triangular representation, the
image reconstruction method and its error metric. The definitions of Delaunay and data
dependent triangulation will also be presented in this chapter. Finally, this chapter will end
with a discussion of graph theory for triangular mesh applications.
3.1 Input and Output Data
Usually a natural gray-scale image contains a lot of redundant information. This redundancy
in data can be used for file compression so that less storage or transfer capacity will be
required. The similarity in intensity and rate of change at different scales are some of the
duplications in data that can be used in compression. Since it is possible to segment some
regions into triangles without substantially degrading the quality of the image, a triangular
mesh is a good approach for data compression for storage reduction and data processing.
3.1.1 Gray-Scale Image
A gray-scale image is usually presented in the two-dimensional domain. It can be viewed as a
set of finite intensity (or magnitude) values being sampled at finite intervals with time (or
space) domain. This can be mathematically expressed as:
( ) 1| , , 1,..., , 1,...,ij ij i jV v v f x y i N j N= = ∈Ω = = 2 (3.1)
where represents the parameter domain and and represent the number of samples
along each dimension of the image. Meanwhile, the intensity of the image, which can be
found at each of the sample points, can be defined as:
Ω 1N 2N
22

CHAPTER 3. BACKGROUND AND RELATED WORK
( ),i j if x y z= j N
)
)
y
, and (3.2) 11,...,i N= 21,...,j =
where represents the quantized value of the intensity at sample location ( . Normally
this value is in an integer that ranges from 0 to 255.
ijz ,i jx y
3.1.2 Triangulation
A triangulation is a partitioning of the 2D image plane into a set of triangles. It may be
represented using a set of appropriate vertices, which are located on the original grid of
sample points, and a set of edges that connects those vertices. A vertex can be represented by
three parameter variables as
( )1 1 1, ,i i i iV x y I= (3.3) 1 2 31 Vi i i N≤ ≠ ≠ ≤
where is the number of vertices found in the triangulation. Note that ( is the
sampled location of the vertex V and is the quantized intensity at that location.
VN1 2,i ix y
i iI
In addition to vertex information, a triangulation requires vertex connection
information. This relationship is usually defined in the form of edges. An edge is a line
segment that connects two vertices and it can be expressed by
( )1 2,i i iE V V= , (3.5) 1 21 Ei i N≤ ≠ ≤
A triangle is a planar patch, which is determined by three non-collinear points that are
connected by three line segments. This patch can be defined by
( )1 2 3, ,i i i iT V V V= , (3.4) 1 2 31 Ti i i N≤ ≠ ≠ ≤
where the three vertices V ,V and V are located at three different sample points in the two-
dimensional plane and is the number of triangles. The triangulation, , in a finite
parametric domain, Ω⊂ , must satisfy four conditions:
i
2R
j k
x − TN VΓ
(i) Let V be the set of all vertices found in such that V V . VΓ i j φ=∩
(ii) j is either iE E∩ φ or a vertex if i j . ≠
(iii) , where is the number of triangles in a given triangulation. 1
TN
ii
T=
Ω = ∪ TN
(iv) is either iT T∩ j φ or a common edge , or a common vertex V if . kE k i j≠
23

CHAPTER 3. BACKGROUND AND RELATED WORK
Therefore the triangulation can be defined as VΓ
| 1,...,V i TT i NΓ = = (3.6)
Since it is common to define an operator for the number of elements in a set as i , we define
TN = ΓV as the number of triangles in the triangulation , which covers the parameter
domain and
VΓ
2RΩ⊂ VN V= as the number of vertices in the triangulation . VΓ
Figure 3.1 and 3.2 illustrate some of the regular sampled grid triangulations and how
the sampling can affect the quality of the image. The original image of a crater lake is shown
in Figure 3.1 (a) while (b) shows an example of the locations of points on the 16x16 regular
sample grid. Figure 3.2 (a-c) show the triangulations that are sampled at different regular
finite intervals of 4, 8 and 16 respectively. Since the image size is 256x256, the grid sizes are
64x64, 32x32 and 16x16 respectively while the reconstructed images are shown in Figure 3.2
(d-f). These images are reconstructed using the Gouraud shading technique, which will be
explained in Section 3.3. Although denser triangulation gives a better approximation of
the original image, it requires more vertices and triangles for image representation.
VΓ
3.2 Delaunay and Data-Dependent Triangulations
There has been much research concerning the minimization of error using refinement
methods. Some of these methods are greedy insertion [De Floriani et al. 85], feature-based
[Scarlatos and Pavlidis 92], and hierarchical subdivision [De Floriani et al. 84]. The greedy
insertion algorithm scans for a vertex location where total error reduction is achieved. This
method produces a good approximation of the original dataset. However it is time-consuming
to search for an optimal point. This drawback motivates the search for a faster algorithm. A
feature-based method is proposed using the features to determine the vertices or edges of the
triangulation [Chen and Schmitt 93]. Edge detectors and Laplacian filters have been proposed
to detect some of these features for vertex insertion in mesh refinement [Southard 91].
24

CHAPTER 3. BACKGROUND AND RELATED WORK
(a) (b)
Figure 3.1 – Regular sample grid. (a) Original image of crater lake of size 256x256. (b) Locations of sample points taken by the regular sampling grid of size 16x16.
(a) (b) (c)
(d) (e) (f)
Figure 3.2 - Approximation of an image using a regularly sampled triangular mesh. Triangular meshes with regular sampling grid size of (a) 64x64, (b) 32x32 and (c) 16x16. Reconstructed images using Gouraud shading on the regular sampling grid of (d) 64x64, (e) 32x32 and (f) 16x16 respectively.
Another approach is hierarchical subdivision [Scarlatos and Pavlidis 92], which
recursively subdivides a triangle into smaller sub-triangles to represent a better
approximation of the original dataset. The advantage of this method is its fast computation
and use of multiresolution modeling. Its reconstructed image quality, however, is no better
than that of the greedy insertion method.
Besides these refinement processes, one of the equally important decisions for triangle
representation is to determine the choice of triangles without considering error metrics. One
of the proposed methods for choosing triangles is Delaunay triangulation [Kropatsch and
Bischof 01]. Generally, this type of triangulation is known as the dual of the Voronoi
25

CHAPTER 3. BACKGROUND AND RELATED WORK
diagram, which segments the parameter domain into regions in such a way that points lying
in the same region are located nearest to the vertex of its region. A Voronoi polygon is
defined by
( ) ( ,i ii j
p H p pκ≠∩ )j
)
(3.7)
where is a discrete point (or vertex) of interest and is a half-plane that contains
the set of points that lie in and are located nearer to than to . Therefore, if there are
vertices in the domain, each Voronoi polygon can result from the intersection of at most
half-planes. These polygons are convex with no more than sides.
ip ( ,i jH p p
ip2R jp
N −
N
N 1− 1
Delaunay triangulation can be achieved from a Voronoi diagram by connecting
vertices, whose regions in the Voronoi diagram intersect. The result of using the Delaunay
scheme is the triangulation that maximizes the minimum angles of all triangles. In other
words, in a Delaunay triangulation, the circle that circumscribes three vertices of any triangle
contains no other vertices. Figure 3.3 below shows an example of a Voronoi diagram with ten
vertices of interest and its corresponding Delaunay triangulations, while Figure 3.4 shows an
example of Delaunay triangulation and non-Delaunay triangulation.
Figure 3.3 - Example of a Voronoi diagram and its Delaunay triangulation. (a) Voronoi diagram and its points (or vertices) of interest. (b) Corresponding Delaunay triangulation.
26

CHAPTER 3. BACKGROUND AND RELATED WORK
Figure 3.4 – Concept of Delaunay triangulation. (a) In a Delaunay triangulation, no other vertices lie in the circumscribing circle of each triangle. Circle C does not include vertex V and circle C does not contain vertex V . (b) Non-Delaunay triangulation. Circle C contains more than three vertices. It includes vertices V , V , V and V .
1 4
2 1 1
1 2 3 4
Although the Delaunay triangulation method is fast in regularizing the triangulation, it
does not guarantee an optimal solution to the approximation. In many applications, the choice
of Delaunay triangulation can significantly increase the approximation error. It is found that
non-Delaunay triangles can produce a better result in most cases because long, sliver triangles
can give a better approximation, especially along the edges, where large changes in intensity
occur.
Figure 3.5 compares the results of reconstructed images of Lena using both Delaunay
triangulation and non-Delaunay triangulation. An edge swap operation, which will be
discussed in Section 5.4.1, is performed on the 16x16 regular grid triangulation to improve
the reconstruction image quality. It can be observed that the Delaunay triangulation tends to
produce a lot of inappropriate triangles along the edge in the image. This is because it does
not allow the thin, sliver triangles in the set. However, the data-dependent triangulation,
which permits sliver triangles, yields a better rough approximation to the image data. The
reason is that a change in intensity can be represented more accurately by thin, sliver triangles
by short, ‘fat’ triangles. However it is possible to combine these two important parameters to
achieve a better result. The choice of combining Delaunay and data-dependent triangles will
be discussed in Section 5.4.1.
27

CHAPTER 3. BACKGROUND AND RELATED WORK
(a)
(b) (c)
(d) (e)
Figure 3.5 – Comparison of Delaunay triangulation and non-Delaunay triangulation. (a) Original image of Lena. (b-c) A Delaunay triangulation and its reconstructed image. (d-e) A non-Delaunay triangulation and its reconstructed image.
28

CHAPTER 3. BACKGROUND AND RELATED WORK
3.3 Gouraud Shading
There are many techniques to perform shading of a triangle. The choice of rendering not only
helps the triangulation-based image look more realistic, but also smooths the edges between
adjacent triangles. The shading technique used in this thesis is based on the Gouraud shading
technique [Watt 93]. Given a sequence of three vertices (V ,V and V ) and their intensity
values ( , and ), it is possible to perform Gouraud shading on a triangle by bilinear
interpolation. Figure 3.6 shows the concept of how Gouraud shading can be performed.
1 2 3
1I 2I 3I
To render a triangle, first, its maximum and minimum values ( and ) in the
(vertical) direction are determined. These two values are used for the vertical scan
limitation. Next, for each row starting from to , its horizontal boundaries (
and ) and their intensities ( and ) are calculated by interpolating a necessary pair of
vertices, whose edges give the limitation of the horizontal boundaries.
maxy miny
y
sy
aI
maxy miny ax
bx bI
( ) ( )( )
2 11
2 1a s
x xx y y
y y−
= − +− 1x (3.8)
( ) ( )( )
3 11
3 1b s
x xx y y
y y−
= − +− 1x (3.9)
( ) ( )( )
2 11
2 1a s
I II y y
y y−
= − +− 1I (3.10)
( ) ( )( )
3 11
3 1b s
I II y y
y y−
= − +− 1I (3.11)
These interpolated values not only smooth the intensity between two vertex points but also
smooth the connection between two connected triangles. This is because the two connected
triangles share the two vertices of same location and intensity. Finally, in the same way, the
intensity inside the triangle can be calculated by the horizontal scan of . With each value of
from to , the intensity inside the triangle, , can be calculated as
sx
sx ax bx sI
( ) ( )( )
b as s a
b a
I II x x
x x−
= − +− aI (3.12)
29

CHAPTER 3. BACKGROUND AND RELATED WORK
( )2 2 2 2, ,V x y I y
Vertical Scan of sy
( )1 1 1 1, ,x y I
( )1 , ,c c cV x y I
maxy
Figure 3
For com
where
method
addition
error ten
∆
O
as Mach
brighter
system
93]. Fig
perceive
x
.6 – Gouraud shading
putational efficiency,
is the incremente
significantly improve
. However one of its d
ds to get larger as n in
sI
ne of the disadvantag
banding. The chang
or darker band of in
to the first derivative
ure 3.7 shows the Mac
d signal relative to th
( ), ,a s ax y I
miny
– bilinear intensity inter
incremental calculation
( ) ( )s bb a
xI Ix x∆
∆ = −− aI
I, , 1s n s n sI I −= + ∆
d change in intensity a
s the calculation time by
rawbacks is its imprecis
creases.
es of employing Gourau
e in intensity triggers t
tensity. This is due to th
of intensity, which is u
h band phenomenon. N
e actual ramp signal.
30
( ), ,b s bx y I
V
( )3 3 3 3, ,x y I
polatio
is pref
nd n i
repla
ion. Si
d shad
he hum
e high
sed to
otice th
V
n.
erable:
(3.13)
(3.14)
s the value from to . This
cing multiplication operator with
nce there is round off in , the
ax bx
I∆ s
ing is a visual side effect known
an visual system to perceive a
sensitivity in the human visual
detect and enhance edges [Watt
e overshoot that occurring in the

CHAPTER 3. BACKGROUND AND RELATED WORK
Figure 3.7 – Mach band phenomenon. (a) Actual signal intensity. (b) Signal intensity perceived by human visual system.
3.4 Error Metric
Since a reconstructed image is an approximation of the original, there will be an error
between the original and the reconstruction. Therefore it is necessary to define an error metric
to measure the quality of the reconstructed image. Let be a planar patch that approximates
a triangular region, , in an image. For i , must satisfy a plane equation
defined by ich can be determined by the three vertices forming
the triangle T . In the parameter domain, this approximated patch can be defined as:
iTf
TiT
i i
1,2,...,= NiTf
( ), iP x y a x b y c= + + ,
i
i wh
) )
)
( ,iTf x y = (3.15) ( ),
0iP x y ( ) (, ix y T
otherwise∈Ω
( ,iP x y , = (3.16) ( )ig z 1 2 3, ,i i i i=
where defined the boundary of the parameter domain of the triangulations and i ,
and are the vertices of triangle . The function is used for a better approximation
when noise or a high frequency component is present in the data. Since the wavelet transform
yields both approximation and detail of the original data, the function can take
( )iTΩ 1 2i
3i iT ( )g z
( )g z
31

CHAPTER 3. BACKGROUND AND RELATED WORK
advantage of this computation. With the definition of the approximation of triangles, the
approximation of the triangulation can be defined as
∑=
Γ =∧
t
iTi
V
ff1
(3.17)
which accounts for the approximation of non-overlapping triangles. The error metric,
which is shown in Figure 3.8, can be denoted by
TN
V
f f∧Γ
− . It is normally measured by the
average of the sum of squared errors, which is normally called mean-squared error (MSE).
MSE can be defined as
( ) ( )2
2 1 , ,vy x
f x y f x y dxdyx y ∧Γ
∆ ∆
∆ = −∆ ∆ ∫ ∫ (3.18)
This is computationally equivalent to
( ) ( )2
1 1
1 , ,V
M N
y x
MSE f x y f x yMN ∧Γ
= =
= − ∑∑ (3.19)
where M and N denote the height and width of the image respectively. Another popular error
metric is the peak-signal-to-noise ratio ( ). It is defined by PSNR
max1020log IPSNR
MSE= (3.20)
where is the possible maximum intensity value in of the image. Usually, this value is
255 for a gray-scale image. In reconstruction, a , that is larger than 30 dB, will often
appear to have little or no visible degradation. However this still depends on the image itself.
maxI
PSNR
3.5 Graph Theory
Since the approximation algorithm in this thesis is based on triangulation, the two-
dimensional image has to be segmented into many triangular regions, which are represented
by three vertices. One of the solutions to present this type of data structure is to use an
undirected graph. A graph G V consists of a set of vertices, V, and a set of edges, E,
which defines a relationship between the vertices.
( , E= )
32
CHAPTER 3. BACKGROUND AND RELATED WORK
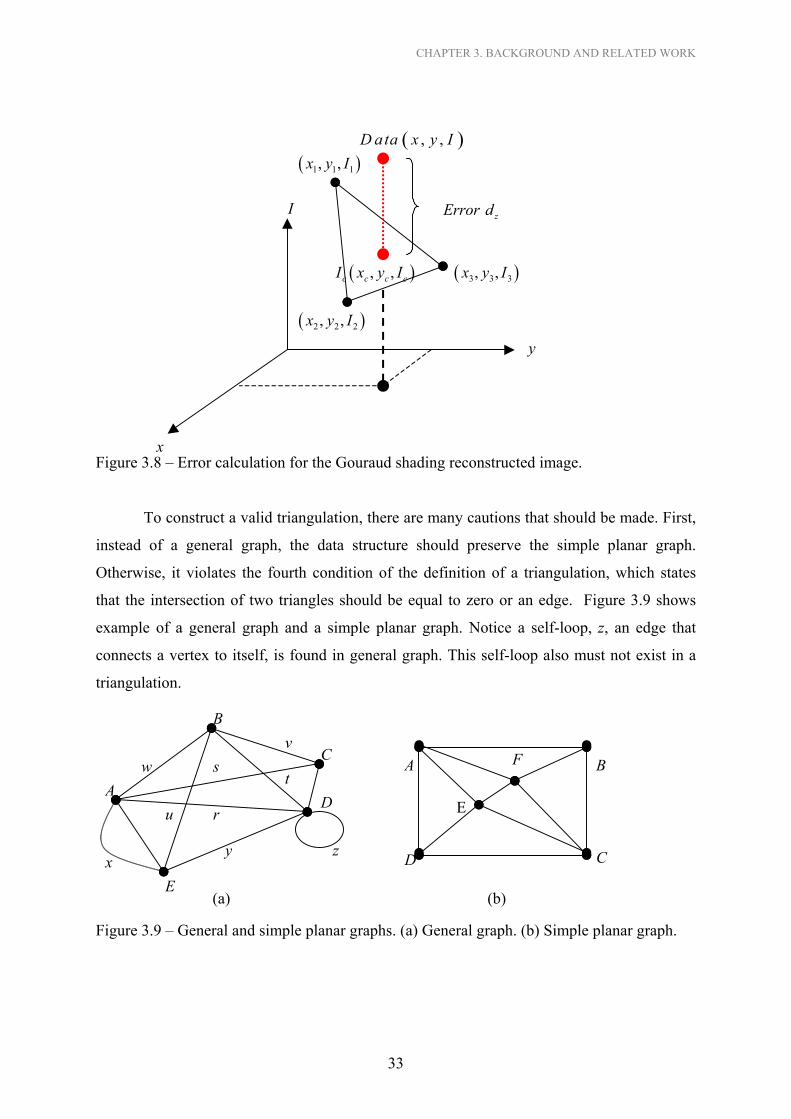
Figure 3.8 – Error calculation
To construct a valid tri
instead of a general graph,
Otherwise, it violates the fou
that the intersection of two tri
example of a general graph a
connects a vertex to itself, is
triangulation.
w
x
B
y
v
u
ts
r
I
x
( )1 1 1, ,x y I( ), ,D ata x y I
A
E
(a)
Figure 3.9 – General and simp
for the
angul
the d
rth co
angle
nd a
found
C
D
( 2,x
( ), ,c c c cI x y I ( )3 3 3, ,x y I
Error zd
le pla
Go
atio
ata
ndit
s sh
sim
in
z
2,y I
nar
uraud shading
n, there are ma
structure shou
ion of the defi
ould be equal
ple planar grap
general graph.
)2
D
A
graphs. (a) Gen
33
y
reconstruct
ny cautions
ld preserve
nition of a
to zero or
h. Notice
This self-lo
E
F
(b)
eral graph.
ed image.
that should be made. First,
the simple planar graph.
triangulation, which states
an edge. Figure 3.9 shows
a self-loop, z, an edge that
op also must not exist in a
B
C
(b) Simple planar graph.

CHAPTER 3. BACKGROUND AND RELATED WORK
Since the graph is mathematically defined by its vertices and their binary relation, the
positions of the vertices and the curvature of the edge are not factors used to consider the
equivalence of the two graphs. Figure 3.10 shows two equivalent graphs, which have
different representations.
x w
A v B z
s
r
q
P
O
N
M
t
u C y D
(a) (b)
Figure 3.10 – Equivalent graphs. (a) Original graph. (b) Equivalent graph with different representation.
It is possible to show that these two graphs are equivalent by the bijection mapping of
the vertex and edge names. The following shows the equivalences to show that they are the
same graphs.
Edge Equivalent v q→
Two graphs G
such
bijection can be d
=
:f G G→
vf
Furthermore, the
isomorphic funct
by
Vertex Equivalent
w rx sy tz u
→→→→
A MB NC OD P
→→→→
V and G V are isomorphic if there exists at least one bijection
that ( ) if and only if . This vertex and edge
efined by:
( , E ) ))
G
( , E=
E∈,U V ( ) ( )( ,f U f V E∈
: G GV V→ and (3.21) :e Gf E E→
composite function f also inherits the isomorphism property from the two
ions. The composite functions of two isomorphic functions can be denoted
( )1 2 1 2f f f f f= = (3.22)
34

CHAPTER 3. BACKGROUND AND RELATED WORK
In the special case of a simple graph, if there exists a vertex bijection such that
is adjacent to if and only if x is adjacent to y for all ( ) , the two graphs
are isomorphic. Therefore only vertex bijection is sufficient to show isomorphism of the two
simple graphs. This property is essential to designing templates for initial triangulation,
which will be discussed in Section 4.2.3.
:v G Gf V V→
GV∈( )f x ( )f y ,x y
35





























